Embed Size (px)
Citation preview

ⓒ 2012 FunctionBay, Inc.
Particle Dynamics with MBD and FEA Using CUDA
Graham Sanborn, PhD Senior Research Engineer Solver 2 (MFBD) Team FunctionBay, Inc., S. Korea

ⓒ 2012 FunctionBay, Inc.
Overview
• MFBD: Multi-Flexible-Body Dynamics
– Rigid & flexible body motion simulation tool
• Adding Particles Dynamics to MFBD via the GPU
– Adds high value to MFBD
– Excellent match for GPU computing
– Low implementation cost
• Issues and examples of the particle dynamics with MFBD
Vehicle model courtesy of Jacob Hustad

ⓒ 2012 FunctionBay, Inc.
What is MFBD?
• MFBD: Multi-Flexible-Body Dynamics = MBD + FEA – MBD = Multi-body dynamics
– FEA = Finite element analysis
• Compute – Motion
– Forces, stresses, strains
• For systems of bodies – Both rigid and flexible
• Interactions through – Joints
– Contact
ⓒ 2012 FunctionBay, Inc.
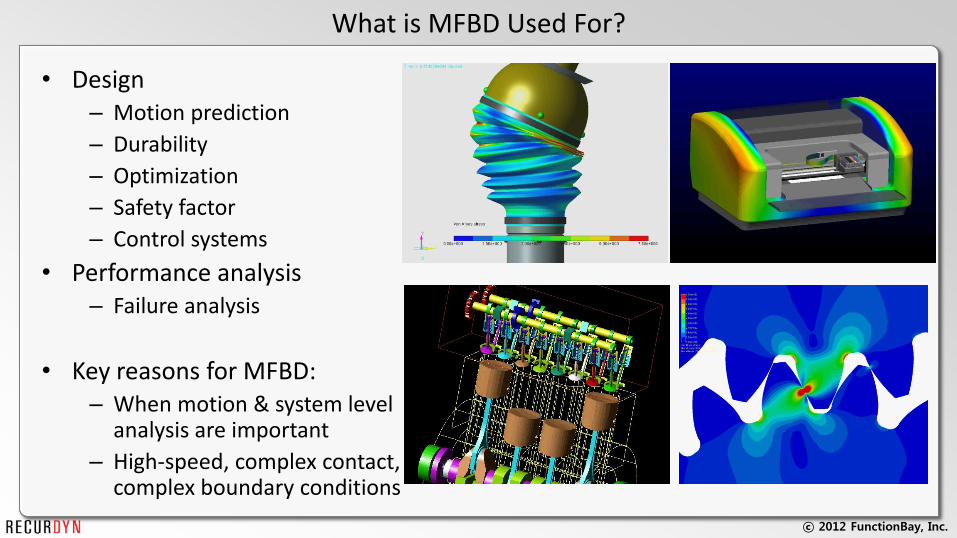
What is MFBD Used For?
• Design – Motion prediction
– Durability
– Optimization
– Safety factor
– Control systems
• Performance analysis – Failure analysis
• Key reasons for MFBD: – When motion & system level
analysis are important
– High-speed, complex contact, complex boundary conditions

ⓒ 2012 FunctionBay, Inc.
The MFBD Environment
• Strong coupling of system variables – Nonlinear systems
• Rotation, nonlinear constraints • Nonlinear deformation, materials
• Implicit differential-algebraic equation (DAE) solvers – Alpha-family of steppers
• Newmark, generalized-alpha
– Requires heavy use of Newton-Raphson nonlinear system solvers
• Sparse direct multi-frontal linear system solver
• Small systems of equations – 1,000’s ~ 1,000,000’s of variables
• Long simulation times – 1,000’s ~ 1,000,000’s of time steps
T T
T T T T
e e
e
r
e r
e eee er
e ree e
eeee ee
r r rr rrr er
e r rr rr
rr er er
er er
q q
q
z z
q
q q
F FΦ 0 Φ
q qq F
Φ 0 0 0 0λ Φ
F F q F0 B Φ B Φ
q q λ Φ
0 0 Φ 0 0 λ Φ
Φ 0 Φ 0 0

ⓒ 2012 FunctionBay, Inc.
MFBD + GPU Computing
• Goal:
– Add value to MFBD through the computational power of the GPU.
• First application:
– Particle dynamics
ⓒ 2012 FunctionBay, Inc.
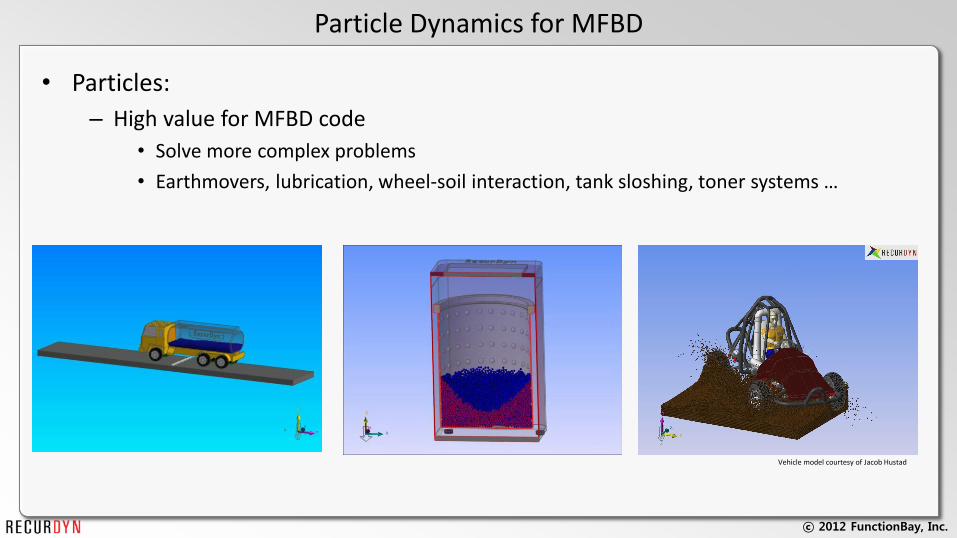
Particle Dynamics for MFBD
• Particles:
– High value for MFBD code
• Solve more complex problems
• Earthmovers, lubrication, wheel-soil interaction, tank sloshing, toner systems …
Vehicle model courtesy of Jacob Hustad

ⓒ 2012 FunctionBay, Inc.
Particle Dynamics for MFBD
• Particles:
– Expensive on the CPU
• More particles = more useful
• Huge number of particles & variables
• Loose coupling of equations
• Particles interact through forces (not joints)
– Excellent fit for GPU computing
– Implementation cost relatively low
• Particle formulations:
– Granular solids: DEM (Discrete element method)
• Dirt, sand, rocks, toner
– Fluids: SPH (Smoothed particle hydrodynamics)
• Lubrication, flows, slosh, splash
ⓒ 2012 FunctionBay, Inc.
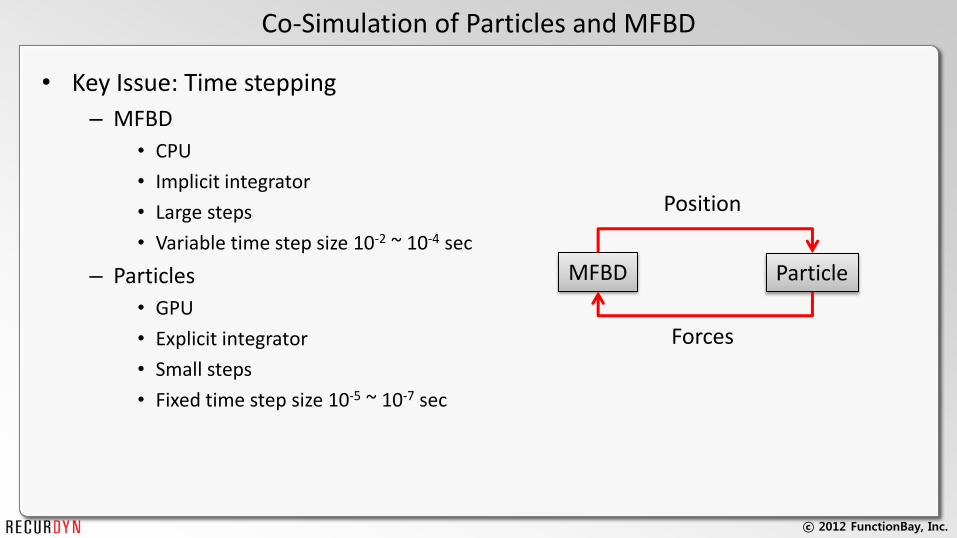
Co-Simulation of Particles and MFBD
• Key Issue: Time stepping
– MFBD
• CPU
• Implicit integrator
• Large steps
• Variable time step size 10-2 ~ 10-4 sec
– Particles
• GPU
• Explicit integrator
• Small steps
• Fixed time step size 10-5 ~ 10-7 sec
MFBD Particle
Position
Forces

ⓒ 2012 FunctionBay, Inc.
Co-Simulation
MFBD (CPU Side) Particle (GPU Side) MFBD Particle
Position
Forces

ⓒ 2012 FunctionBay, Inc.
Co-Simulation Stepping Algorithm
MFBD Particle
Position
Forces
MFBD Step Particle Steps
ti ti+1 ti ti+1
Transfer MFBD surface positions to particle solver (on GPU).
Solve MFBD motion from ti to ti+1. Particle contact forces considered constant.
Solve particle motion between ti and ti+1. Linearly interpolate MFBD contact surfaces from ti to ti+1.
1.
2.
3.
Transfer particle-to-surface forces at ti+1 to MFBD solver 4.

ⓒ 2012 FunctionBay, Inc.
Particle Stepper
• Per step (all on GPU):
– Identify contacts
– Compute contact forces
– Compute positions at next time step
• Explicit stepper

ⓒ 2012 FunctionBay, Inc.
Contact Algorithm Details
• Particle-to-MFBD-surface contact algorithm:
– Particle shape: spherical
– MFBD body surface: triangles
– Contact search: sphere-to-triangle
– Force: penalty-based
Penetration depth

ⓒ 2012 FunctionBay, Inc.
Particle-to-MFBD-Surface Contact
• Linear interpolation of body position from ti to ti+1
– Rigid bodies:
• Interpolate center point and orientation
– Flexible bodies:
• Interpolate nodal positions

ⓒ 2012 FunctionBay, Inc.
Examples
• Particle computational performance
– Test hardware:
• GPU: Tesla C2050
• CPU: Intel i5 760 (Quad-core, 2.8GHz)
• RAM: 8GB
– Test problem:
• Particle step size: 10-6 sec
• Simulation tend: 1 sec
• # time steps: 1,000,000
# Spheres Computation Time (Hours)
1,000 0.45
2,000 0.50
5,000 0.67
10,000 0.90
20,000 1.83
50,000 4.67
100,000 9.12
200,000 22.00
500,000 46.83
ⓒ 2012 FunctionBay, Inc.
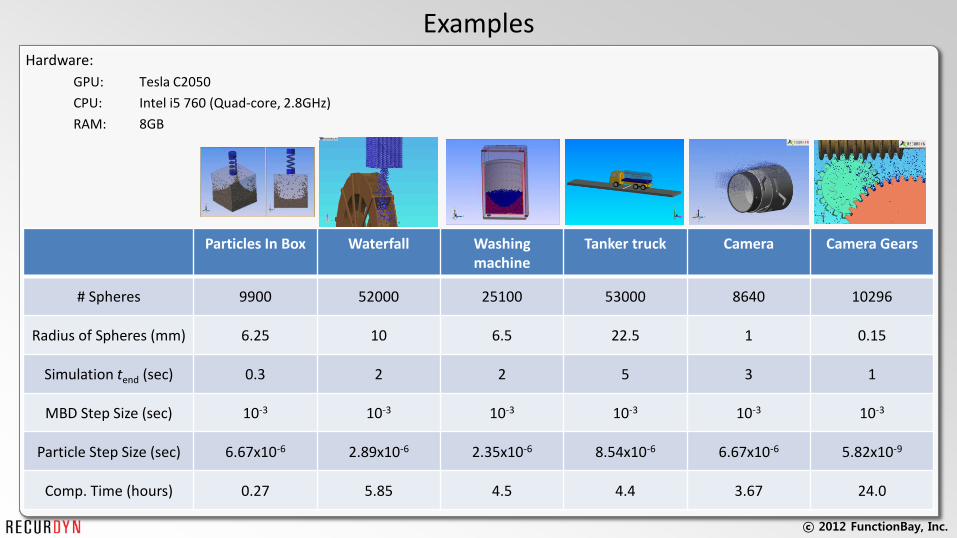
Examples Hardware:
GPU: Tesla C2050
CPU: Intel i5 760 (Quad-core, 2.8GHz)
RAM: 8GB
Particles In Box Waterfall Washing machine
Tanker truck Camera Camera Gears
# Spheres 9900 52000 25100 53000 8640 10296
Radius of Spheres (mm) 6.25 10 6.5 22.5 1 0.15
Simulation tend (sec) 0.3 2 2 5 3 1
MBD Step Size (sec) 10-3 10-3 10-3 10-3 10-3 10-3
Particle Step Size (sec) 6.67x10-6 2.89x10-6 2.35x10-6 8.54x10-6 6.67x10-6 5.82x10-9
Comp. Time (hours) 0.27 5.85 4.5 4.4 3.67 24.0

ⓒ 2012 FunctionBay, Inc.
Implementation Status, Future Direction
• Current Status:
– DEM + MBD (rigid only)
– Single GPU only
• Next Targets:
– MFBD (add flexible body interaction)
– SPH
– Multi-GPU support

ⓒ 2012 FunctionBay, Inc.
Conclusion
• Particle Dynamics:
– Adds high value to MFBD
– Excellent match for GPU computing
– Low implementation cost
– Co-simulation to combine MFBD solver and particle solver

ⓒ 2012 FunctionBay, Inc.
Thank You





























