Embed Size (px)
Citation preview

•Veći broj jedinica koristi informacije istog senzora, upravlja istim aktuatorima, treba izbeći mogućnost “sudaranja” i nesklada u dejstvu
• Potrebna je razmena informacija, odlučivanje o prioritetu akcija
•Npr. sistem za udobnost ili infotainment ne sme da zauzme resurse potrebne za dejstvo sistema bezbednosti ili upravljanja pogonom i sl.
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Osnovni koncept komunikacije u elektronskim sistema vozila
Dr Boris Stojić, 2018
dejstvo sistema bezbednosti ili upravljanja pogonom i sl.
•Upravljačke jedinice moraju da se međusobno “razumeju” tj. da “govore istim jezikom”
• Komunikacioni protokoli uređuju pravila i standarde “jezika” komunikacije – npr. kako je strukturiran binarni niz koji predstavlja poruku, šta znači koja pozicija u nizu, radni takt, brzina slanja i prijema podataka...
•Hardverska realizacija komunikacije: povezivanje komponenata medijumima za prenos komunikacionog signala (bakarni provodnik, optički provodnik, bežična komunikacija)

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Osnovni koncept komunikacije u elektronskim sistema vozila
Dr Boris Stojić, 2018
Primer podataka koje razmenjuju upravljačke jedinice

• Topologija predstavlja fizički raspored komponenata i način njihovog povezivanja
•Osnovne topologije: magistrala (data bus), zvezda, prsten
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Topologije komunikacionih sistema
slideshare.net/gregrobertson
Dr Boris Stojić, 2018

•CAN = Controler Area Network – umrežene upravljačke jedinice
•CAN Protokol uređen standardom ISO 11898 – klase A, B, C
• Fizička realizacija komunikacionog medijuma: dvostruki bakarni provodnik, “upredena parica” (twisted pair) – eliminacija elektromagnetnih smetnji
•CAN-H (High) i CAN-L (Low) – visoko- i niskonaponski vod
• Logički signali “0” i “1” se realizuju različitim naponskim stanjima vodova
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
CAN magistrala (CAN-bus)
Dr Boris Stojić, 2018
• Logički signali “0” i “1” se realizuju različitim naponskim stanjima vodova
• Poruke sadrže podatak o prioritetu, za slučaj istovremenog slanja od strane dve ili više UJ
wikipedia.org
Konrad Reif (Editor): Automotive MechatronicsAutomotive Networking, Driving Stability Systems, Electronic

: brzina prenosa 1251000 kBit/s (tipično 500)
• Primena: donji postroj, pogon
• Završava se otpornikom (terminator) – sprečavanje povratne refleksije signala; integrisani u dve hardverski najudaljenije UJ
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
CAN magistrala (CAN-bus)
quora.com
Automotive Mechatronics
Dr Boris Stojić, 2018
picotech.com
• Logička “0”: CAN-H diže napon, CAN-L spušta – dominantni mod
• Logička “1”: oba voda imaju isti (približan) nivo signala – recesivni mod
• Prenos informacija se zasniva na razlici u naponskim nivoima – diferencijalni napon
•U slučaju prekida bilo kog voda (H/L) cela magistrala je u prekidu

: brzina prenosa ispod 125 kBit/s
• Primena: sistemi udobnosti, signalizacija i sl.
•Napon oba voda (H i L) se meri u odnosu na masu vozila
•Moguć prenos informacija pri prekidu jednog od vodova – pogodan za pokretne spojeve (volan, vrata)
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
CAN magistrala (CAN-bus)
Dr Boris Stojić, 2018
wikimedia.org

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
CAN magistrala (CAN-bus)
Dr Boris Stojić, 2018
quora.com
Primer strukture CAN mreže

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
CAN magistrala (CAN-bus)
CAN-H
Dr Boris Stojić, 2018
Primer oscilograma CAN signala (vizuelna kontrola ispravnosti prenosa)
CAN-L
picoauto.com
automotivetroubleshootingsecrets.com
→ Merenje otpora preko pinova 6 i 14 (120 )

•CAN magistrale različite brzine: brži(bezbednost i pogon), sporiji (komfor)
• Sprežni blok (Gateway) – omogućava razmenu podataka između pojedinih magistrala (različitih brzina i tipova); realizovan kao posebna upravljačka jedinica ili u okviru postojećih
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
CAN magistrala (CAN-bus)
Dr Boris Stojić, 2018
Heise.de

• LIN
Manja brzina, jeftiniji; primena npr. u vratima, brisači...
• Flex Ray
Velika brzina – pogodan npr. za upravljanje i kočenje “preko žice” (x-by-wire)
•MOST
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Ostali komunikacioni sistemi u vozilima
Dr Boris Stojić, 2018
•MOST
Optički prenos podataka

•U praktičnom izvođenju se različiti sistemi međusobno kombinuju.
Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Ostali komunikacioni sistemi u vozilima
Dr Boris Stojić, 2018
Toralf Trautmann:Grundlagen der Fahrzeugmechatronik

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
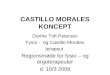
Primer toka informacija: uključivanje brisača
Toralf Trautmann:Grundlagen der Fahrzeugmechatronik
1
1 – komanda brisača (funkcija senzora)
2 – senzor kiše UJ1
UJ2
UJ3 UJ4
2
UJ 1, 2, 3, 4: upravljačke jedinice
1 – za aktiviranje brisača
2 – centralna UJ komandne table
Dr Boris Stojić, 2018
2 – centralna UJ komandne table
3 – UJ električne instalacije
4 – UJ motora brisačaA, B, C, D = poruke (binarni nizovi)
• Komanda brisača 1 je direktno povezana sa upravljačkom jedinicom 1
• Pri aktiviranju komande, UJ1 šalje preko LIN sistema poruku ka UJ2 (poruka A)
•UJ2 formira odgovarajuću poruku usklađenu sa CAN protokolom i šalje je na CAN magistralu (poruka B)

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Primer toka informacija: uključivanje brisača
Toralf Trautmann:Grundlagen der Fahrzeugmechatronik
1
1 – komanda brisača (funkcija senzora)
2 – senzor kiše UJ1
UJ2
UJ3 UJ4
2
UJ 1, 2, 3, 4: upravljačke jedinice
1 – za aktiviranje brisača
2 – centralna UJ komandne table
Dr Boris Stojić, 2018
2 – centralna UJ komandne table
3 – UJ električne instalacije
4 – UJ motora brisačaA, B, C, D = poruke (binarni nizovi)
•UJ3 učitava poruku B i obrađuje podatke u okviru softverskog modula za upravljanje brisačima; proverava se verodostojnost poruke i kao ostali relevantni spoljni uslovi (npr. da li je možda trenutno otvorena hauba)
•Ukoliko su ispunjeni uslovi, preko LIN magistrale se upravljačkoj jedinici 4 šalje poruka za uključenje brisača u zadatom modu (poruka C)

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Primer toka informacija: uključivanje brisača
Toralf Trautmann:Grundlagen der Fahrzeugmechatronik
1
1 – komanda brisača (funkcija senzora)
2 – senzor kiše UJ1
UJ2
UJ3 UJ4
2
UJ 1, 2, 3, 4: upravljačke jedinice
1 – za aktiviranje brisača
2 – centralna UJ komandne table
Dr Boris Stojić, 2018
2 – centralna UJ komandne table
3 – UJ električne instalacije
4 – UJ motora brisačaA, B, C, D = poruke (binarni nizovi)
•UJ4 šalje povratnu informaciju o stanju/položaju brisača ili o eventualnim postojećim ograničenjima za rad (poruka D)
• Po potrebi UJ3 vrši dalje akcije (prilagođavanje parametara rada vozača, slanje upozorenja vozaču i sl.)

Mehatronika MSUS i vozila Komunikacioni sistemi i protokoli
Primer toka informacija: uključivanje brisača
Toralf Trautmann:Grundlagen der Fahrzeugmechatronik
1
1 – komanda brisača (funkcija senzora)
2 – senzor kiše UJ1
UJ2
UJ3 UJ4
2
UJ 1, 2, 3, 4: upravljačke jedinice
1 – za aktiviranje brisača
2 – centralna UJ komandne table
Dr Boris Stojić, 2018
2 – centralna UJ komandne table
3 – UJ električne instalacije
4 – UJ motora brisačaA, B, C, D = poruke (binarni nizovi)
• Koncept omogućava jednostavna funkcionalna proširenja – npr. naknadna realizacija funkcije automatskog uključivanja brisača na osnovu signala senzora kiše