Embed Size (px)
Citation preview
OntologiesReasoningComponentsAgentsSimulations
Project Topics 2007.2Project Topics 2007.2 if710if710, , in1097in1097, in1098, in1098
Jacques Robin
Topics: UML2 Profiles and SPEM2 Topics: UML2 Profiles and SPEM2 Process for CBMDSE Process for CBMDSE
1. A UML2 Profile and SPEM2 Process for the KobrA2 Component-Based Model-Driven Engineering Software (CBMDSE) Methodology Upgrade KobrA to leverage UML2, OCL2, MOF2, SPEM2 Focus OCL constraints of UML2 Profile and SPEM2 Process
2. A UML2 Profile and SPEM2 Process for the ORCAS CBMDSE Methodology Extends KobrA2 Profile and Process with sub-profile and sub-process for
simple 2D GUI Modeling
3. A UML2 Profile and SPEM2 Process for the ORCAS CBMD Multi-Agent Simulation Engineering (CBMDMASE) Methodology Extends ORCAS CBMDSE Profile with agents, sensors, actuators,
environment ... Views agents as active components whose sensors and actuators are
interfaces that internally follow architectural patterns constisting of embedded Automated Reasoning (AR) and Knowledge Base (KB) component assembly
MOF2 meta-model of an OO version of the Fluent Calculus a first-order logic based knowledge representation language for non-monotonic reasoning in MAS
4. A UML2 Profile and SPEM2 Process for CBMDE of 3D Graphics Components
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
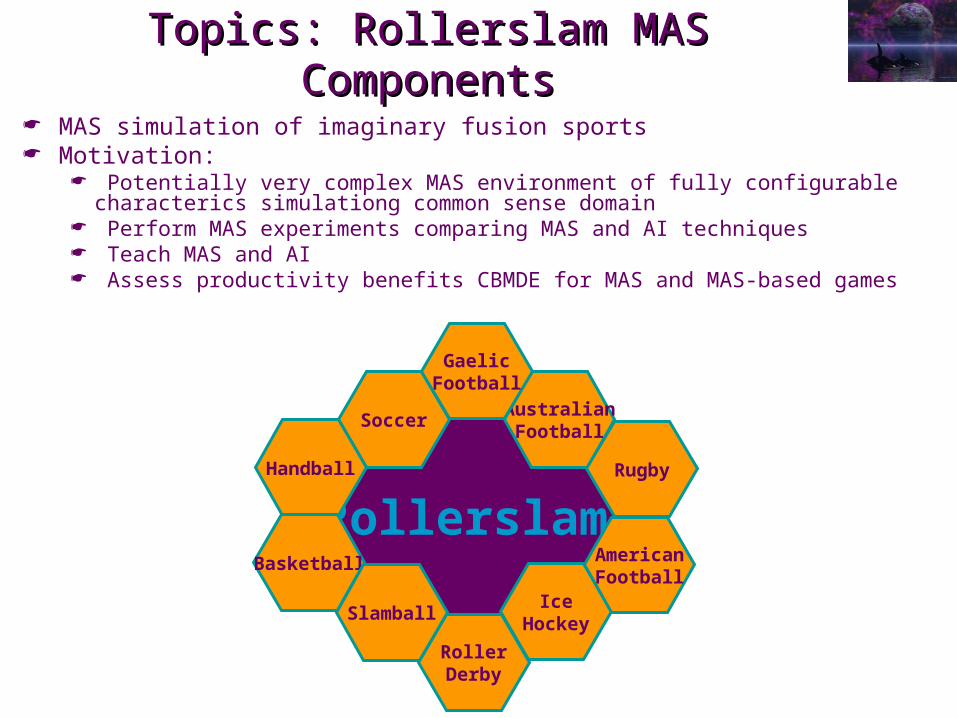
Rollerslam!
Soccer
Handball
IceHockey
AustralianFootball
Basketball
Rugby
GaelicFootball
AmericanFootball
RollerDerby
Slamball
MAS simulation of imaginary fusion sports Motivation:
Potentially very complex MAS environment of fully configurable characterics simulationg common sense domain
Perform MAS experiments comparing MAS and AI techniques Teach MAS and AI Assess productivity benefits CBMDE for MAS and MAS-based games
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
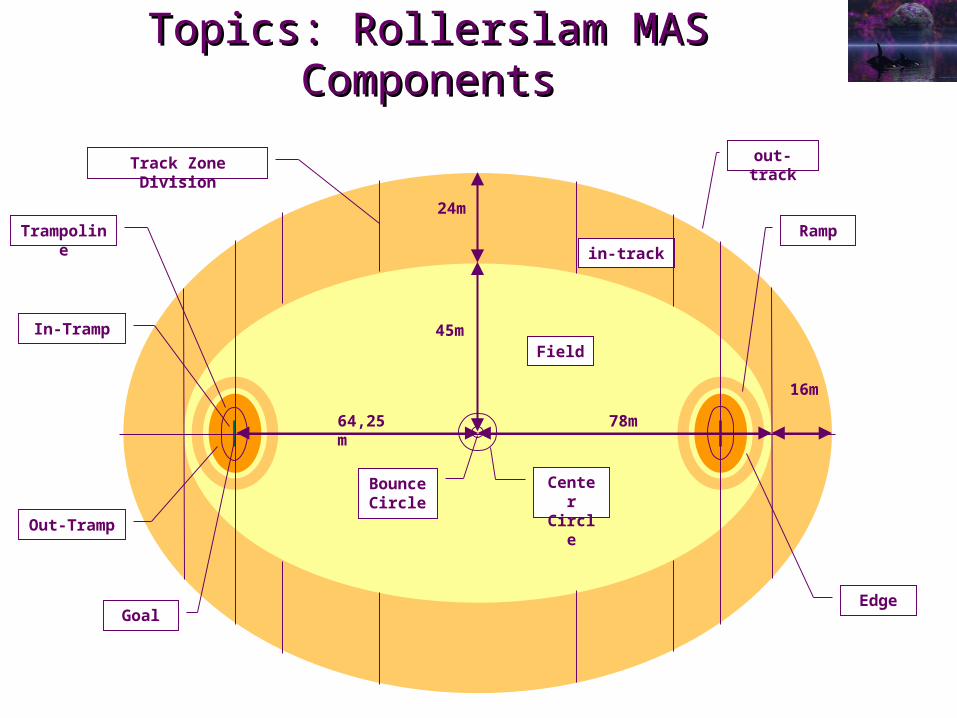
78m
16m
64,25m
45m
24m
Field
in-track
out-track
Ramp
Edge
Trampoline
Goal
In-Tramp
Out-Tramp
CenterCircle
BounceCircle
Track Zone Division

Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
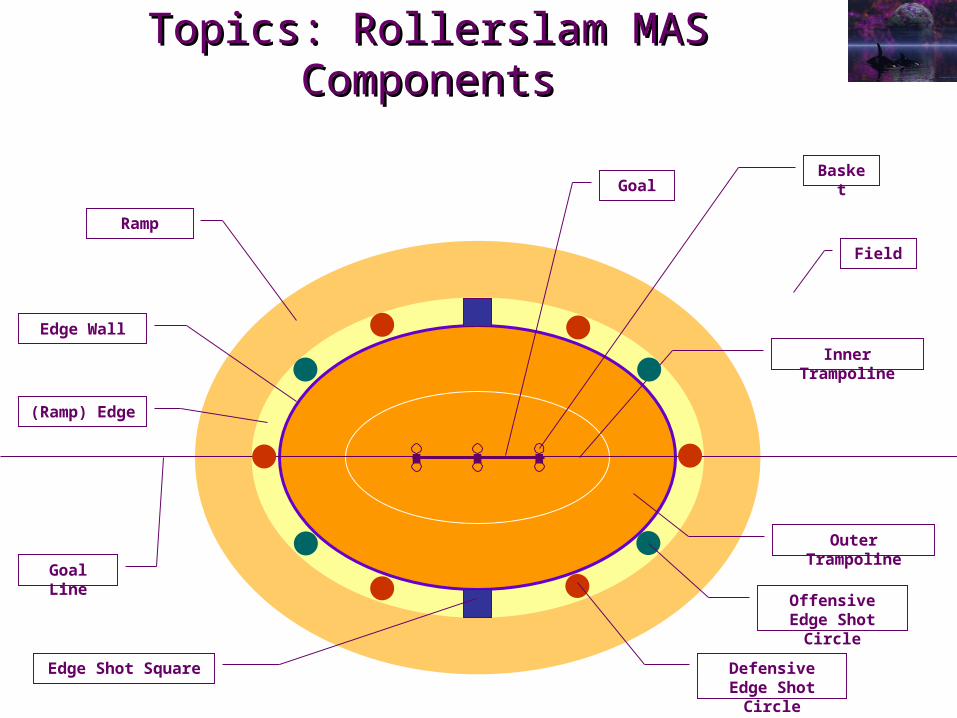
Inner Trampoline
Goal
Ramp
Outer Trampoline
(Ramp) Edge
Basket
Edge Shot Square
Goal Line
Edge Wall
Field
OffensiveEdge Shot Circle
DefensiveEdge Shot Circle
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
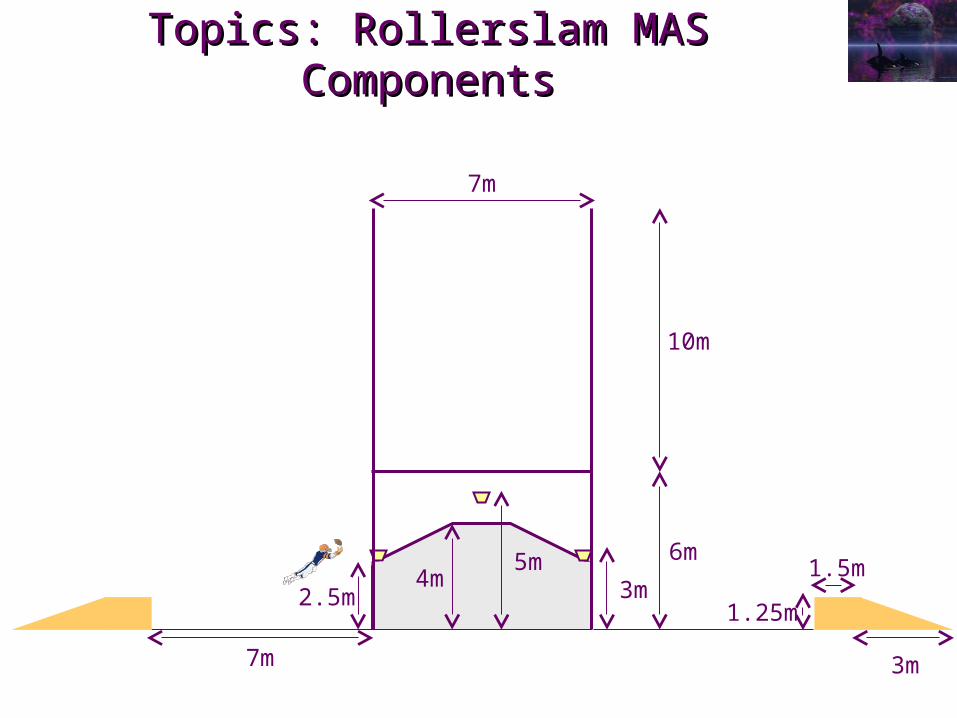
7m
10m
2.5m 3m
6m4m
5m
7m
1.25m
1.5m
3m
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
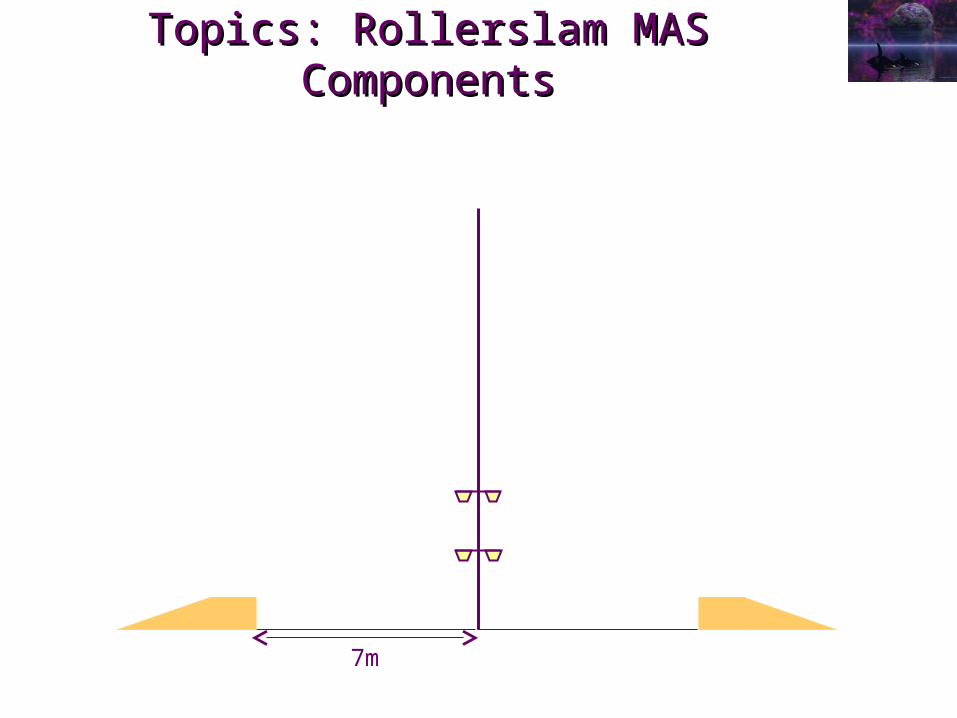
7m
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
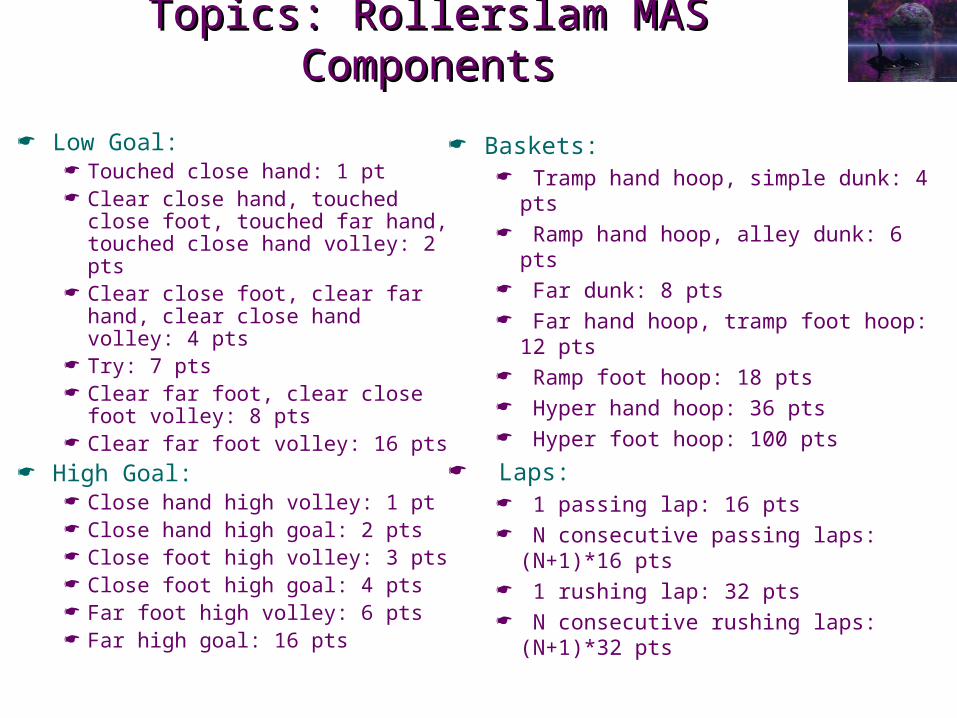
Low Goal: Touched close hand: 1 pt Clear close hand, touched close
foot, touched far hand, touched close hand volley: 2 pts
Clear close foot, clear far hand, clear close hand volley: 4 pts
Try: 7 pts Clear far foot, clear close foot
volley: 8 pts Clear far foot volley: 16 pts
High Goal: Close hand high volley: 1 pt Close hand high goal: 2 pts Close foot high volley: 3 pts Close foot high goal: 4 pts Far foot high volley: 6 pts Far high goal: 16 pts
Baskets: Tramp hand hoop, simple dunk: 4 pts Ramp hand hoop, alley dunk: 6 pts Far dunk: 8 pts Far hand hoop, tramp foot hoop: 12
pts Ramp foot hoop: 18 pts Hyper hand hoop: 36 pts Hyper foot hoop: 100 pts
Laps: 1 passing lap: 16 pts N consecutive passing laps: (N+1)*16
pts 1 rushing lap: 32 pts N consecutive rushing laps: (N+1)*32
pts
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
Two players within a 5m radius circle from a third player in possession of the ball can screen each other by: Pushing or grabbing each other with open hands below the neck
(including from the back) and above the waist Bumping into each other trunk first above the waist Slapping each other on the arms with open hands
Two players within a 5m radius from a loose ball (in possession of no player) can scramble for the ball by: Using the same physical contacts allowed for a screen, or Elbowing each other in the arms or trunk from the front or side
A player can tackle an opponent in possession of the ball by: Using the same physical contacts allowed for a screen, or Pushing or grabbing him with open hands below the waist Bumping into him trunk first below the waist
A player in possession of the ball can counter-tackle an opponent by: Using the same physical contacts allowed for a tackle, or Elbowing him in the arms or trunk from the front or side
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
A player is in possession of the ball when: He holds it in one or both hands He holds it against his trunk with one or both arms It is within reach of his limbs and out of reach of any other player’s
limbs A player distant from the ball by more than 5m cannot be
intentionally pushed, grabbed, hit or bumped into in any way During a legal tackle, screen or scramble:
A player on the ramp, edge or outer trampoline, can only be pushed, grabbed or bumped into either laterally or towards the goal,
A player on the inner trampoline, can only be pushed, grabbed or bumped into either laterally or towards the ramp,
A player on the out-track can only be pushed, grabbed or bumped into away from the fence
A standing or floored player cannot tackle, screen or scramble with a jumping player, and vice-versa.
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
Bi-directional scoring: Play takes place both in front and behind the goals, with goals
scored in both directions More continuous:
Plays does notnot stop when points are scored Ball very rarely goes out of bounds due to the 10m high fence onto
which the ball can be freely bounced More diverse:
Unparalleled diversity of ways to score various amount of points Integrates moves of handball, soccer, basketball, volleyball, rugby,
american football and roller derby Freer:
Unparalleled freedom for ball handling, positioning and body contacts
More physical: Hardest body contacts allowed within safety limits
More acrobatic: With skates and trampoline, jumping ramp and banked track
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
More technical: players need to know how to skate on flat and inclined surfaces, jump on a trampoline throw, catch, spike, head and kick the ball control the ball with feet, trunk and hands shoot and dunk at baskets shoot at two different goals with any body part score tries on a trampoline dribble opponents using hands, trunk, feet, head, the air and the
fence More tactical:
Mind-boggling diversity of plays with different rewards Complex screening and counter-screening patterns within a 5m
radius of the ball, yet freedom of movement beyond it
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
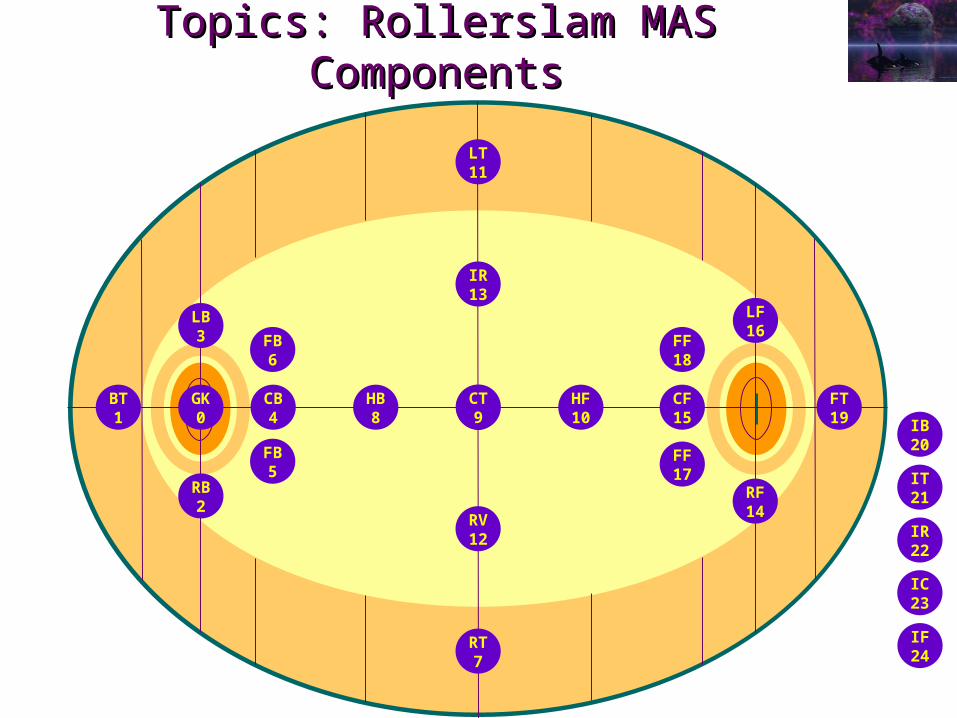
BT1
GK0
RB2
LB3
CB4
FB5
FB6
HB8
RT7
CT9
LT11
HF10
RV12
IR13
CF15
RF14
LF16
FT19
FF17
FF18
IB20
IT21
IR22
IC23
IF24

Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
Rollerslam 1.0: 6 student project of 4 graduate courses during 2007.1 2D Distributed components:
1 Generic MAS Communication Infrastructure 1 Game Physics Simulator Agent 1 Umpire Agent (Rule Simulator) 2 Coach Agents 40 Player Agents Domain Model Defined as Domain Agents’ Percepts and Actions N Game Displays Oversimplified agent percepts and actions
Oversimplified game physics simulation Oversimplified rules Trivial player agent behavior Single granularity tracing GUIs for: agent actions, percepts PIM: UML2 / FLUX (not KobrA2) Code: Java / Prolog
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
Rollerslam 2.0: ?? student project of 3 graduate courses during 2007.1 More realistic 2D agent percepts and actions More realistic 2D game physics simulation More realistic and complete set of 2D rules Smarter 2D player tactical behavior Systematic multi-granularity tracing GUI
High-level components Agent’s percepts, actions) Agent’s internal components (volatile KB, rule application)
PIM: ORCAS CBMDE / FLUX Code: Java / Prolog
Topics: Rollerslam MAS ComponentsTopics: Rollerslam MAS Components
Rollerslam 3.0: ?? student project of 3 graduate courses during 2007.1 3D 3D agent percepts and actions 3D game physics simulation Complete 3D rules 3D player behavior 3D Game Display 3D Systematic multi-granularity tracing GUI
High-level components Agent’s percepts, actions Agent’s internal components (volatile KB, rule application)
PIM: ORCAS CBMDMASE Code: Java / Prolog

Topics AllocationTopics Allocation
1. ORCAS UML2 Profile (Vinicius, Joabe, Pablo, FMP)a. KobrA2 Profile w/ OCL constraints (Vinicius, Pablo) 15/11b. Extension with GUI Modeling Profile (Rafael, FMP) 22/11c. Extension with Agents as active KobrA2 components with Sensors and
Effectors are required Interfaces and internal assembly following agent architectural patterns (Vinicius, Pablo) 29/11
d. Extension with KB components as OO fluent calculus, substituting terms by UML2 objects and formulas by OCL2 constraints (Vinicius, Pablo) 09/12
e. Extension with 2D Graphics Modeling Profile (Joabe, FMP) 29/11f. Extension with 3D Graphics Modeling Profile (Joabe, FMP) 09/12
2. ORCAS SPEM2 Process (Marcus, Breno) a. KobrA2 Process 22/11b. Extention w/ GUI modeling steps 29/11c. Extension w/ stepd to model agents and their social role structures,
interaction protocols and internal Automated Reasoning (AR) and Knowledge Bases (KB) component assembly patterns (Vinicius, Pablo) 09/12
d. Extension w/ steps to model KB with an OO version of the fluent calculus, substituting terms by UML2 objects and formulas by OCL2 constraints (Vinicius, Pablo) 16/12
e. Extension w/ steps to model 2D Graphics Components (Joabe, FMP) 09/01f. Extension w/ steps to model 3D Graphics Components (Joabe, FMP) 21/01
Topics AllocationTopics Allocation
3. Top-level simulation component (Maurelio)a. KobrA2 PIM (15/11)b. Upgraded Java Implementation (22/11)c. ORCAS PIM (16/12)d. Upgraded Java Implementation (23/12)
4. Agent Communication Infra-Structure Component (Maurelio)a. KobrA2 PIM (15/11)b. Upgraded Java Implementation (22/11)c. ORCAS PIM (16/12)d. Upgraded Java Implementation (23/12)
Topics AllocationTopics Allocation
5. Rollerslam Agent Percepts and Actions (Gleibson, Sidney, Cleyton)a. KobrA2-FLUX PIM for 2D simulation 15/11b. Java-FLUX implementation for 2D simulation 22/11c. ORCAS PIM for 3D simulation 16/12d. Java-FLUX implementation for 3D simulation 23/12
6. Rollerslam Game Physics (Gleibson, Sidney, Cleyton)a. Actions preconditions: Gleibson, Cleytonb. Actions direct effects: Sidney, Cleytonc. Ramifications: Cleyton For each sub-task:
i. KobrA2-FLUX PIM for 2D simulation 29/11ii. Java-FLUX implementation for 2D simulation 09/12iii. ORCAS PIM for 3D simulation 14/01iv. Java-FLUX implementation for 3D simulation 23/01

Topics AllocationTopics Allocation
7. Rollerslam Umpire (Fábio, Thiago, Pablo)a. KobrA2-FLUX PIM for 2D simulation 29/11b. Java-FLUX implementation for 2D simulation 09/12c. ORCAS PIM for 3D simulation 14/01d. Java-FLUX implementatio for 3D simulation 23/01
8. Rollerslam Player Behavior (Vinicius, d’Oleron, Rilton, Adilson, Edivaldo, Maurelio)a. withBall Behavior (Vinicius, Maurelio)b. nearBall Offense Behavior (d’Oleron, Maurelio)c. nearBall Defense Behavior (Rilton, Maurelio)d. nearLooseBall Behavior (Adilson, Maurelio)e. farBallBehavior (Offense, Defense, LooseBall, Edivaldo, Maurelio) For each subtask:
i. KobrA2-FLUX PIM for 2D simulation 29/11ii. Java-FLUX implementation for 2D simulation 09/12iii. ORCAS PIM for 3D simulation 14/01iv. Java-FLUX implementatio for 3D simulation 23/01
Topics AllocationTopics Allocation
9. Game Display (Joabe, Breno)a. 2D Graphics Profile PIM 23/12b. Java 2D Implementation 07/01c. 3D Graphics Profile PIM 16/01d. Java 3D or DirectX Implementation 23/01
10.Agent Reasoning Tracing (Rafael, Weslei)a. Trace Driver of Agent A (Agent’s A team, Weslei)b. Trace GUI (Rafael, Weslei)c. Trace Generator (Rafael, Agent’s A team, Weslei) For each subtask:
i. KobrA2-FLUX PIM for 2D simulation 29/11ii. Java-FLUX implementation for 2D simulation 09/12iii. ORCAS PIM for 3D simulation 14/01iv. Java-FLUX implementation for 3D simulation 23/01
11.Integration Testing: (Maureli, Breno, Weslei) 28/01





























