-
Full Terms & Conditions of access and use can be found
athttp://www.tandfonline.com/action/journalInformation?journalCode=tgei20
Download by: [Bulent Ecevit University] Date: 27 July 2017, At:
08:05
Geocarto International
ISSN: 1010-6049 (Print) 1752-0762 (Online) Journal homepage:
http://www.tandfonline.com/loi/tgei20
Novel fusion approach on automatic objectextraction from spatial
data: case studyWorldview-2 and TOPO5000
U. G. Sefercik , S. Karakis, C. Atalay, I. Yigit & U.
Gokmen
To cite this article: U. G. Sefercik , S. Karakis, C. Atalay, I.
Yigit & U. Gokmen (2017): Novel fusionapproach on automatic
object extraction from spatial data: case study Worldview-2 and
TOPO5000,Geocarto International, DOI:
10.1080/10106049.2017.1353646
To link to this article:
http://dx.doi.org/10.1080/10106049.2017.1353646
Accepted author version posted online: 12Jul 2017.Published
online: 27 Jul 2017.
Submit your article to this journal
Article views: 6
View related articles
View Crossmark data
http://www.tandfonline.com/action/journalInformation?journalCode=tgei20http://www.tandfonline.com/loi/tgei20http://www.tandfonline.com/action/showCitFormats?doi=10.1080/10106049.2017.1353646http://dx.doi.org/10.1080/10106049.2017.1353646http://www.tandfonline.com/action/authorSubmission?journalCode=tgei20&show=instructionshttp://www.tandfonline.com/action/authorSubmission?journalCode=tgei20&show=instructionshttp://www.tandfonline.com/doi/mlt/10.1080/10106049.2017.1353646http://www.tandfonline.com/doi/mlt/10.1080/10106049.2017.1353646http://crossmark.crossref.org/dialog/?doi=10.1080/10106049.2017.1353646&domain=pdf&date_stamp=2017-07-12http://crossmark.crossref.org/dialog/?doi=10.1080/10106049.2017.1353646&domain=pdf&date_stamp=2017-07-12
-
Geocarto InternatIonal,
2017https://doi.org/10.1080/10106049.2017.1353646
Novel fusion approach on automatic object extraction from
spatial data: case study Worldview-2 and TOPO5000
U. G. Sefercika , S. Karakisa, C. Atalaya,
I. Yigitb and U. Gokmenc
aDepartment of Geomatics engineering, Bulent ecevit University,
Zonguldak, turkey; bDepartment of civil engineering, Bulent ecevit
University, Zonguldak, turkey; cGraduate School of natural and
applied Sciences, Bulent ecevit University, Zonguldak, turkey
ABSTRACTThe automatic extraction of information content from
remotely sensed data is always challenging. We suggest a novel
fusion approach to improve the extraction of this information from
mono-satellite images. A Worldview-2 (WV-2) pan-sharpened image and
a 1/5000-scaled topographic vector map (TOPO5000) were used as the
sample data. Firstly, the buildings and roads were manually
extracted from WV-2 to point out the maximum extractable
information content. Subsequently, object-based automatic
extractions were performed. After achieving two-dimensional
results, a normalized digital surface model (nDSM) was generated
from the underlying digital aerial photos of TOPO5000, and the
automatic extraction was repeated by fusion with the nDSM to
include individual object heights as an additional band for
classification. The contribution was tested by precision,
completeness and overall quality. Novel fusion technique increased
the success of automatic extraction by 7% for the number of
buildings and by 23% for the length of roads.
1. Introduction
At the end of the 1990s, with the launch of the first
high-resolution commercial satellite IKONOS, space-borne optical
remote sensing gained considerable popularity. High-spatial
resolution especially benefited the geometric accuracy and acquired
information content of spatial imagery. As a conse-quence, a large
variety of professional disciplines began to prefer spatial imagery
in such applications as temporal change detection (Baiocchi et al.
2010), the establishment of geographical information systems (GISs)
(Font et al. 2010), the creation of three-dimensional views and
relief maps (Fraser 2003), disaster monitoring and management
(Vassilopoulou et al. 2002; Navalgund et al. 2007), for-estry
(Stereńczak and Kozak 2011), agriculture (Thompson et al. 2001;
Schmidt and Persson 2003) and drainage (Jain and Singh 2005). In
parallel, satellite manufacturers developed new satellites equipped
with advanced imaging technologies, and the spatial resolution of
panchromatic (PAN) optical imagery reached
-
2 U. G. SEFERCIK ET AL.
high flight altitudes and limited imaging capabilities of
optical sensors limit the estimation of terrain and non-terrain
objects. To minimize these disadvantages, numerous studies have
been conducted on improving the quality of spatial imagery
(Meenakshisundaram 2005). The basic parameter of the quality of an
image is the heterogeneity of visual objects which simplifies their
identification. To improve the heterogeneity, two basic criteria
are significant, namely, spatial resolution, which affects the
detection of the shape of the object, and spectral (colour)
structure (Aguilar et al. 2012). In space-borne optical imagery,
high-spatial resolution is obtained from the PAN band, and colour
information is obtained from multispectral (MS) bands through the
visual wavelengths of red, green, and blue (RGB) (Maxwell 2005).
Ordinarily, the spatial resolution of MS imagery is two or four
times lower than PAN in advanced optical sensors; however, MS and
PAN data are fused with the ‘pan- sharpening’ method, and colourful
imagery can be obtained with the spatial resolution of PAN (Hong
2007). Pan-sharpening can be applied using various methods, such as
principle component analysis (PCA) (Hong 2007; Rani and Sharma
2013) and hue intensity saturation (HIS) (Rahmani et al. 2010),
Wavelet, Gram Schmidt and University of New Brunswick (UNB)
(Nikolakopoulos 2008). Increasingly, VHR pan-sharpened space-borne
optical imagery is used for object extraction and the revision of
vector maps (Sportouche et al. 2009; Bhadauria et al. 2013).
To extract the information content of space imagery, the two
main methods commonly preferred are manual and automatic (Theng
2006; Benarchid et al. 2013). In comparison with the manual
extraction process, the automatic extraction process is rapid and
time saving and is more reasonable for wide areas. In addition,
this process enables the extraction of vector semantic data, which
can be easily analysed in GIS software and applications (Baltsavias
et al. 2001). However, the basic principle of automatic object
extraction is heterogeneity, but considerable errors are caused
when objects with similar shape and spectral reflectance that
should be in different classes are placed into the same class.
Therefore, missing or falsely extracted objects causes the
production of misleading topographic vector maps (Shaw and Burke
2003; Pedelty et al. 2004; Bedard et al. 2012).
In this study, we aimed to minimize the automatic object
extraction faults using a novel fusion approach, and maximize the
information content obtained from spatial data. Accordingly, a
large coverage Worldview-2 (WV-2) VHR mono-image was chosen as the
sample data, and performance improvement and verification steps
were realized utilizing a 1/5000 scale topographic vector map
(TOPO5000). In our approach, the elevation information of
non-terrain objects was provided by generating a normalized digital
surface model (nDSM) derived from digital aerial photos used in the
production of TOPO5000, and later fused with WV-2 data as an
additional band in classifica-tion. NDSM is a differential model,
calculated by the subtraction of a digital terrain model (DTM),
which represents only the three-dimensional (3D) bare earth
topography, from a digital surface model (DSM), the 3D earth
surface including all terrain and non-terrain objects, such as
buildings, vegetation and roads (Niederöst 2000; Straub et al.
2001). NDSM is mainly used in the discipline of forestry for height
detection of trees and forest stands (Stereńczak et al. 2008;
Smreček 2012; Sefercik and Atesoglu 2013).
The contribution of the novel fusion approach was validated by
standard quantitative measures, such as precision (correctness),
completeness and overall quality (Heipke et al. 1997; Karantzalos
and Paragios 2009), in comparison with the information content from
the reference TOPO5000. Considering the objectives of the research,
the paper is organized as follows: Section 2 describes the study
area and materials used followed by the methodology section. The
results and discussion will be presented in Section 4 followed by
the conclusions.
2. Study area and materials
The research was carried out for a national TOPO5000 map named
‘H21C05D’, which has a cover-age area of approx. 6 km2
(2.2 × 2.8 km). The area is located in Bursa, which
is the fourth biggest
-
GEOCARTO INTERNATIONAL 3
metropolitan in Turkey with a population of 2.8 million and
an annual increase of 5%. The city is located in the Marmara region
in the northwest of Turkey, with various topographic formations and
orthometric altitudes of up to 2500 m. The study area is a
rapidly changing residential area, and a difficult one for
automatic object extraction, containing different roof types and
materials. The Bursa Greater Municipality completed a digital
photogrammetric mapping project called Metropolitan 3 (M3) between
2008 and 2011. Using a digital camera, the image quality was
improved, allowing for the increase of speed and accuracy of
photogrammetric triangulation and processing. Additionally, more
qualitative orthophoto and vector maps were generated. In the
project, approximately 4500 1/1000 scale topographic vector maps
(TOPO1000) and 300 TOPO5000 maps were produced in an area of
1650 km2 using traditional photogrammetry under the
supervision of the first and second authors of this paper. The
aerial photos of the study area were obtained using Vexcel
UltraCam-Xp high-quality digital camera during 14–20 June 2009
having 11 cm ground sampling distance (GSD). The TOPO5000 maps
were obtained by generalization from TOPO1000. As known, the seeing
limit of human eye is approx. ‘0.2 mm’ which corresponds
‘1 m’ in 1/5000 scale and an object can be recognized
individually at least by 2 pixels. Considering this parameters,
some areal thresholds are determined by the Countries in
generalization from TOPO1000 to TOPO5000 to eliminate over small
objects which cause noise in the maps. In Turkey, the areal
threshold is 25 m2 for TOPO5000 and accordingly, the objects
that have the area ≤25 m2 were eliminated in generalization.
Some of the eliminated details by this process are the manholes,
rainwater removals, electric and phone poles and outbuildings.
In addition to this project, to ensure full coverage of the
Bursa city area (~12,000 km2), the Greater Municipality
provided the WV-2 image with a physical GSD of 46 cm in the
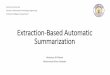
nadir view. In Figure 1, showing Bursa city in Turkey, the full
city coverage WV-2 image and the study area are shown. The
information about the UltraCam-Xp, photogrammetric flight, and WV-2
imaging are given in Table 1.
Figure 1. (a) Map of turkey (red circle is Bursa city), (b)
used WV-2 image of entire Bursa city, (c) ortho-photo of the study
area derived from stereo digital aerial photos of toPo5000.
-
4 U. G. SEFERCIK ET AL.
3. Methodology
The main steps of the methodology applied to improve the
performance of automatic object extraction are shown as a workflow
diagram in Figure 2. During the workflow: to narrow over large WV-2
image borders and manual extraction, NetCAD 5.2 software was
utilized. Segmentation and automatic object extraction were
completed in Ecognition 8.8.2. To achieve DSM and DEM point clouds
from aerial photos and their processing and filtering, Agisoft
Photoscan 1.1.6 and TerraScan Microstation V8i were used,
respectively. DSM, DTM and nDSM generation and all of
visualizations were realized by Surfer 11 and LISA 4.7. For WV-2
Wallis filtering and the entire DSM and DTM processes, Bundle Block
Adjustment Leibniz University Hannover (BLUH) version 2015 were
employed. Finally, for calculating the number of buildings and road
lengths, ArcGIS 9.1 software was preferred.
3.1. Image enhancement
The enhancement process of the WV-2 image was completed in two
steps as pan-sharpening by the UNB algorithm and Wallis filtering.
The pan-sharpening method facilitates using the sensors’ spectral
capabilities simultaneously with high spatial resolution. The PAN
WV-2 images are obtained in the wavelength of 0.4–0.8 μm, are
sensitive for green colour, and partially cover the near infrared
band. In comparison with PCA, HIS, Wavelet and Gram Schmidt
pan-sharpening algorithms, UNB has the advantage of green band
sensitivity. The algorithm works on a statistical basis, and uses
the least squares method to calculate the contribution of each
imaging band to the final product to find the best coherence
between the combined imaging bands’ grey values, and reduce the
spectral distortion independent of the data-set (Zhang 2002). In
the first step, a 0.5 m pan-sharpened image was achieved with
0.5 m PAN and 2 m MS imagery of WV-2 by UNB. Second,
objects which cannot be identified due to low contrast or shadow,
are unveiled by Wallis filtering. Wallis is a local statistical
filter, used for local contrast improvement by modifying the grey
value of the pixels towards the direction of the desired mean grey
value in the pixel’s neighbourhood (Jazayeri and Fraser 2008;
Ballabeni et al. 2015).
Table 1. Flight and imaging information.
Parameter UltraCam-Xp Aerial Flight (M3) WV-2 Instrument
Date – 2009 2011Image acquisition type – Mono and stereo
MonoImaging bands Pan + MS + nIr Pan-sharpened
(l3) Pan-sharpenedImage size (W×l) 11,310 × 17,310 pixel
(Pan) – 320,000 × 240,000 pixel
3770 × 5770 pixel (rGB)Pixel size 6 μm –
0.5 mGSD ((Ps/f ) × h)) 0.1034 m –coverage –
1650 km2 11,500 km2
Distance between columns – 1100 m –camera focal length (f )
100.5 mm – 13.3 mBase – 340 m –Flight height (h) –
~57,000 ft = 1733 m 770 kmPhoto-scale –
~(100.5/1,733,000) = 1/17,300 –Direct sensor orientation
GPS/IMU – GPS/IMU/Star trackerFrontlap and slidelap of aerial
photos– 70–30% –
radiometric resolution >12bit – 11bitWeight 55 kg –
2615 kg
-
GEOCARTO INTERNATIONAL 5
Therefore, the filtered image histogram will be normally
distributed. Equation (1) gives the calculation of a pixel grey
value by Wallis filtering;
In the formula, Gin and Gout are the grey value of a pixel
before and after Wallis filtering, respectively. Min and Mout are
the mean and desired mean grey values of neighbour pixels. Sin and
Sout are the standard deviation and desired standard deviation of
grey values, respectively. The relation between Sin and Sout is
limited by ‘gain limit’. This formula can be modified as follows by
the addition of a factor for desired mean ‘F’, reducing the change
from the Wallis filter.
Wallis filtering was applied to the pan-sharpened WV-2 image
with several parameter combinations, and the outputs were
interpreted based on the visual quality of the heterogeneity of
different land forms. In Figure 3, the contribution of the Wallis
filter can be clearly seen in the WV-2 image of the study area.
3.2. Manual and automatic object extraction
After the enhancement processes, buildings and roads were
manually and automatically extracted from the WV-2 image. Manual
extraction provided an opportunity to validate the pros and cons of
the automatic process in comparison with the human eye. In
addition, this approach facilitates deter-mining the real
information content of the WV-2 image with the advantage of one by
one vectorisa-tion and classification of visible buildings and road
centrelines. Automatic extraction was realized as object-based
using the combination of shape and spectral (colour) heterogeneity
(Baatz et al. 2004). The heterogeneity is determined by fused
adjacent objects in a stable direction (e.g. top-down, bot-tom to
up), as limited by the pre-determined scale parameter. In
principle, the fused objects continue
(1)Gout = Mout + (Gin −Min) ×SoutSin
(2)Gout = Mout × F +Min × (1 − F) + (Gin −Min) ×SoutSin
Figure 2. Methodology.
-
6 U. G. SEFERCIK ET AL.
as the first object (obj1) and the second object (obj2), and the
fusion of obj1 and obj2 is named as obj1 for the next merge, and
merge with another obj2 again. The shape heterogeneity consists of
two sub-heterogeneities as compactness, which represents the
closeness of the pixels clustered in an object by comparing it to a
circle; and smoothness, the similarity between the image object
borders and a perfect square (UTSA 2013). The spectral
heterogeneity is the standard deviation of digital numbers (DN) of
the pixels that cover the object. As a consequence, the overall
heterogeneity can be calculated by Equations (3)–(7). In the
formulas, Δhoverall, Δhsp, Δhsh, Δhcm, Δhsm are the overall,
spectral, shape, compactness, and smoothness heterogeneity,
respectively. N is the number of channels of the seg-mented
satellite image, W represents the channel weight, n describes the
number of pixels belonging to the object 1 and 2 (obj1 and obj2), σ
is the standard deviation, l and b are the factual border length
and the perimeter of the bounding obj1, obj2 (Tian and Chen
2007).
(3)Δhsp =N∑
i=1
Wi
(
nmerge�merge
i−
(
nobj1�obj1
i+ nobj2�
obj2
i
))
(4)Δhcm = nmergelmerge
√
nmerge−
�
nobj1
lobj1√
nobj1+ nobj2
lobj2√
nobj2
�
(5)Δhsm = nmergelmerge
bmerge−
(
nobj1
lobj1
bobj1+ nobj2
lobj2
bobj2
)
(6)Δhsh = WcmΔhcm + (1 −Wcm)Δhsm
Figure 3. Pan-sharpened WV-2 image before (left) and after
(right) Wallis filtering.
-
GEOCARTO INTERNATIONAL 7
Table 2 shows the segmentation parameters in four levels used
for the most successful automatic extraction on WV-2 and the Wallis
filtered version. The optimal values for segmentation parameters
are defined considering the image characteristics used (e.g.
resolution, viewing geometry, radiometry, and distortions), object
properties (e.g. length, width, and roof types), and the resulting
segmentation outcome. In the table, ‘level’ determines whether the
newly generated image level will either overwrite a current level,
or whether the generated objects shall become sub- or super-objects
of a still existing level. The order of generating the levels
affects the objects’ shape (top-down, bottom-up segmenta-tion).
‘Scale’ describes a threshold value to stop the fusion of objects
and segmentation. That means, if the larger scale is used, more
objects are fused in segmentation and larger objects occur. ‘Colour
and Shape’ are the weight of spectral and shape homogeneity in
segmentation and their total has to be 1. Accordingly, a high
spectral homogeneity value indicates a lower influence of shape
homogeneity in segmentation. ‘Compactness and Smoothness’ define
whether the objects shall become more compact (fringed) or more
smooth. ‘Weight of image channels’ determines the weight of an
image channel on the segmentation. For the images that have
comparable channels in size and content, such as WV-2, each channel
should be weighted equally (Hofmann 2001; Benz et al. 2004). The
used WV-2 image is not a true-ortho, which is why the nDSM version
was not utilized in the segmentation, but used in classification
functions. In image classifications, several customized object
features, which are arith-metically calculated on an average band,
and shape values were defined. For instance, different
multi-plication functions such as the ratio of band to brightness
(mean of all bands), nDSM and red, nDSM and brightness were
determined. To ease the vectorization in classification, angular
and rectangular membership functions were utilized, and the objects
were extracted without additional defuzzification.
In segmentation, the fusion of shape and spectral heterogeneity
is designed on a two dimensional (2D) base. However, space-borne
imagery has some distortions that cause misleading results in 2D
segmentation. In Figure 4, on the WV-2 image, there are two
instances of distortions as spectral explosions (4(c) and (d)), and
unclear building borders mix with roads (4(a) and (b)), disrupting
the spectral heterogeneity and preventing the acquisition of
regular segments. To eliminate the influence of distortions and
provide the correct separation of buildings and roads, we aimed to
add elevation information as an additional band to the automatic
classification.
The performance of object extractions was validated by common
classification criteria as precision (correctness), completeness,
and the overall quality presented in Equations (8)–(10) as P, C and
Q, respectively. In the equations, TP, FP, FN mean true positives,
false positives, and false negatives (Clode et al. 2004; Mancini et
al. 2009). In this research, TP represents the number of correctly
extracted objects, FP symbolises incorrectly extracted objects, and
FN stands for not extracted objects. For the calculations in the
road layer, length is used instead of the number.
(7)Δhoverall = (1 −Wsh)Δhsp +WshΔhsh
(8)P =TP
(TP + FP)
Table 2. Segmentation parameters and applied thresholds for
WV-2 imagery.
DataSegmentation
levels Scale Colour Shape Compactness Smoothness
Weight
R G BWV-2 1 10 0.4 0.6 0.5 0.5 1,1,0.1
2 20 0.1 0.9 0.2 0.8 1,1,13 30 0.5 0.5 0.5 0.5 1,1,14 8 Spectral
difference 1,1,1
WV-2 Wallis 1 10 0.4 0.6 0.5 0.5 1,1,0.12 20 0.2 0.8 0.5 0.5
1,1,13 30 0.5 0.5 0.5 0.5 1,1,14 8 Spectral difference 1,1,1
-
8 U. G. SEFERCIK ET AL.
3.3. DSM, DTM, and nDSM generation and refinement
The elevation of non-terrain objects was obtained by the
generation of nDSM formulized in Equation (11). As seen in the
equation, nDSM is a derivative product, obtained from DSM and DTM
height differences (Hashemi 2008). DSMs and the DTMs are the basic
components for mapping and are largely utilized for the production
of credible ortho and true ortho-images bringing 3D functionality
to aerial and space-borne imagery through ortho-rectification. The
quality of these models directly effects the quality of the orthos.
The WV-2 mono image used was ortho-rectified by image distributor
Digital Globe.
In DSM and DTM generation, first point-clouds were obtained from
the automatic semi-global match-ing (SGM) of 24 aerial photos that
cover the study area completely (Hirschmüller 2005; Guidi et al.
2014). The variables of automatic image matching are the
non-terrain objects on the stereo-imagery and the most significant
parameter is the correlation coefficient (r). The absolute r
changes between −1 and 1, and depends on the linear relationship
between the same objects in the stereo-imagery. The strongest
linear relationship is determined with −1 or 1 which can be
achieved from totally coherent
(9)C =TP
(TP + FN)
(10)Q =TP
(TP + FP + FN)
(11)nDSM = DSM − DTM
Figure 4. Distortions of WV-2 image; (a) unclear building
borders, (b) influence of unclear building borders on segmentation,
(c and d) spectral explosion.
-
GEOCARTO INTERNATIONAL 9
objects. Conversely, 0 describes no matching and, if high
quality matching is needed, a value of r near 0 is unacceptable.
Normally, the absolute r is expected to be strong in open and flat
areas, and weak in forest and rough terrain. The study area
includes very low forest cover (3%), and the main targets are
buildings and roads, which is why a high absolute r was preferred
in the SGM. The point-clouds were determined under two classes as
‘ground’ and ‘others’. The ground points were used as DTM data, and
the total of ground and others were utilized as DSM data. The
outliers occurred by automatic matching algorithmic errors were
filtered in two steps, before and after DSM/DTM generation. In the
first step, the elevation limits of DSM and DTM data were
calculated by determining the minimum and maximum elevations in
vertical profiles. In this way, outliers out of elevation limits
were excluded in DSM/DTM generation. The second step was carried
out on created DSM and DTM raster data using automatic median
filtering on neighbour pixels. With this method, the median of
relative height differences between neighbour pixels was
calculated, and disparities were detected and eliminated. The gaps
which occur due to eliminated pixels are filled by a smooth least
square interpolation. Figure 5(b) and (c) shows part of the DSM
after the filtering of outliers and refinement, respectively.
For the generation of raster DSMs and DTMs, due to the irregular
nature of point clouds, interpo-lation is required. The
interpolation of a DSM is more difficult than a DTM due to sudden
changes in the height depending on buildings and vegetation (Clark
et al. 2004). This is why a kriging algorithm, effective for dense
point clouds, and a narrow search radius to detect sudden changes,
were preferred for DSM generation. Conversely, considering the
nearly flat topography, the nearest neighbour algorithm
Figure 5. (a) Focused instance area on WV-2, (b) filtered
DSM, (c) refined DSM.
-
10 U. G. SEFERCIK ET AL.
and a twice as large search radius were applied in DTM
generation (Li and Heap 2008). During the creation of nDSM, the
most significant parameter was the minimum height difference, which
helps to separate buildings and vegetation. While the low values of
this parameter cause a noisy nDSM because of non-eliminated
vegetation, high thresholds may induce missing buildings or details
apart from the highest parts of the roofs. In the study,
considering minimum building heights in the area, different
thresholds were used to get the most realistic nDSM. Normally, the
minimum building height in the area is approx. 4 m, but given
possible small height errors in the DSM and the DTM, the threshold
was applied as 2.5 m. In this way, the heterogeneity of
buildings and roads were increased and effect of vegetation was
considerably reduced. Figure 6 illustrates the outcomes obtained
from 2.5 to 5 m minimum height difference. In 5 m, the
vegetation cover was considerably reduced; however, certain
buildings and significant contents were lost.
4. Results
4.1. Manual extraction results
In Figure 7 and Table 3, the manual extraction results are
presented visually and statistically for the building and road
classes. The average of precision, completeness and overall quality
in manual extraction is approximately 95%. This high value is
greatly significant in this study as it is a unique confidence
level to interpret the real information content of WV-2.
In Table 3, TP and related indicator completeness determine the
information content of WV-2 coherent with TOPO5000. Completeness is
approx. 97% both for buildings and roads, which demon-strates a
considerable coherence. Conversely, 118 buildings and
7620.62 m of road were described as FP, indicating that they
were newly constructed between the acquisition dates of TOPO5000
and WV-2 (2009 and 2011). These results were used to interpret the
automatic object extraction and caused errors.
Figure 6. effect of minimum height difference on nDSM; (a)
2.5 m, (b) 5 m.notes: For the view of WV-2 to the same
area, please see Figure 3.
-
GEOCARTO INTERNATIONAL 11
4.2. Automatic extraction results
Automatic object extraction was run for three data-sets as the
WV-2 image, the Wallis filtered WV-2 image, and the Wallis filtered
WV-2 image with nDSM. Figure 8 shows the generated DSM, DTM, and
the nDSM, which was included in the classification as an additional
band after segmentation. As seen in the Figure, the generated nDSM
does not have any remarkable gaps or distortions, and shows the
objects in the study area with an elevation over 2.5 m. Figure
9 displays the automatic extraction results of the WV-2 image, the
Wallis filtered WV-2 image, and the Wallis filtered WV-2 image with
nDSM. Table 4 shows the precision, completeness and overall quality
of the automatic extractions separately.
The previously mentioned overhanging building roofs in Figure
4(a) and (b) make parts of the roads appear rusty, disrupting the
spectral heterogeneity and preventing the acquisition of regular
segments. Therefore, in Figure 9(a), several roads were not
correctly extracted and were included in falsely extracted
buildings as FP. In Figure 9(b), it is clear that the Wallis filter
curbed this problem through contrast adjustment, and the roads were
mostly detected. However, a part of the buildings were detected as
roads due to unusual roof properties. As mentioned before, the
study area is a diffi-cult one for automatic object extraction,
since there are six different roof types: flat, m-shaped, dome,
hip, gable, hip and valley and six different roof materials: clay
tile, asphalt shingle, aluminium, lead sheeting, glazed tile and
gravel. For the m-shaped aluminium roofs in industrial areas,
depending
Figure 7. Manual extraction results; (a) building, (b) road
centreline.
Table 3. Precision, completeness, and overall quality of
manual extraction.
Building (number)
P (%) C (%) Q (%)
Road (length) (m)
P (%) C (%) Q (%)TP FN FP TP FN FPref 3116 0 0 96.2 96.6 93.0
123,495.77 0 0 94.0 97.2 91.6WV-2 3009 107 118 120,080.52 3415.25
7620.62
-
12 U. G. SEFERCIK ET AL.
Figure 8. (a) DtM, (b) DSM, and (c) nDSM with height
scale.
Figure 9. automatic extracted classes
(building = red, road = grey,
vegetation = green); (a) WV-2, (b) Wallis filtered WV-2,
(c) Wallis filtered WV-2 with nDSM.
-
GEOCARTO INTERNATIONAL 13
upon the viewing geometry of the satellite, the grey values of
pixels in the two parts of the m-shape behave differently (dark and
bright). After Wallis filtering, the segments split and decreased
because of contrast enhancement, and some of the isotropic parts
were extracted as road (yellow rectangular in Figure 9(b)). Another
cause of errors in industrial areas is the overly long and narrow
factories with aluminium roofs. Given their shape and similar
spectral structure with roads, they cannot be correctly extracted
with Wallis filtering (black rectangular in Figure 9(b)). Another
instance, the domes of mosques are lead sheeting and shine in the
sunlight, explaining why they are not included in the building
class (white rectangular in Figure 9(b)). All of these problems
were solved with the nDSM-based novel fusion approach (yellow,
black and white rectangles in Figure 9(c)).
In Table 4, only the road centrelines which fully overlap with
the reference TOPO5000 road layer are accepted and calculated as
road length. Considering the temporal decorrelation between WV-2
and TOPO5000 (2009 and 2011), the TP and the related completeness
parameter are assumed to be the main indicators for the validation
of extraction performance. The large portion of FP in out-comes
with nDSM is newly constructed buildings and roads that can also be
utilized for the revision of TOPO5000. It is clear in Table 4, the
novel approach improves the extraction of TP and decreases the FP
at the same time both for buildings and roads. In comparison with
one of the most common filtering method Wallis, the overall
qualities using nDSM fusion are considerably higher.
5. Conclusions
Accurate automatic object extraction is always a challenging
issue for space-borne remotely sensed imagery due to imaging
geometry and the properties of the CCD sensors. In this study, we
suggested a novel approach to improve the performance of automatic
object extraction on the basis of fusing WV-2 VHR mono-image and
TOPO5000 data. Utilizing digital stereo aerial photos, used in the
production of TOPO5000; DSM, DTM, and consequently nDSM, were
generated and validated in the classification as an additional
band. Automatic object extraction was performed three times on a
WV-2 ortho-image, a Wallis filtered version and a
Wallis + nDSM version, respectively. Additionally, manual
object extraction was realized to determine the information content
of the used WV-2 image, and more accurate interpretation of the
automatic extraction outcomes. The improvement in the performance
of an automatic building and road extraction was monitored visually
and statistically using common indicators as precision,
completeness and overall quality. Wallis filtering increased the
heterogeneity of the objects, and consequently the potential of
automatic extraction, particularly for the road layer through
well-balanced contrast enhancement. On the other hand, contrast
enhance-ment caused segmentation problems on different roof types
and materials, explaining why a group of buildings was counted in
the road layer. These challenges were overcome through the
inclusion of elevation information on the objects, derived from the
nDSM fusion in the classification. The results demonstrated that
the novel fusion approach improved the overall quality of the
automatic object extraction by 7% for buildings and 23% for
roads.
Table 4. Precision, completeness and overall quality of
automatic extractions.
Data
Building (number)
P (%) C (%) Q (%)
Road midline (length)(m)
P (%) C (%) Q (%)TP FN FP TP FN FPref 3116 0 0 100 100 100
123,495.77 0 0 100 100 100WV-2 2487 629 573 81.3 79.8 67.4
42,874.93 80,620.84 9064.59 82.5 34.7 32.3WV-2 2460 656 355 87.4
79.0 70.9 87,649.80 35,845.97 55,380.46 61.3 71.0 49.0WallisWV-2
2538 578 296 89.6 81.5 74.4 90,074.60 33,421.17 38,467.71 70.1 72.9
55.61Wallis + nDSM
-
14 U. G. SEFERCIK ET AL.
The used WV-2 image is an ortho-image, ortho-rectified by the
distributor, which is why nDSM is incorporated in the
classification. If our technique is used on a true ortho-image,
nDSM can be used in the segmentation with a greater improvement in
automatic object extraction. This investigation is a future goal of
our research group.
The users, who do not have space-borne stereo data, can increase
the automatic extraction perfor-mance of information content from
mono data by following the processing steps that we proposed. The
proposed techniques may be beneficial especially in underdeveloped
and developing countries which have limited financial sources for
achieving stereo satellite imagery.
AcknowledgementsThe authors are grateful to the Bursa Greater
Municipality for providing the Worldview-2 image, digital aerial
photos and TOPO5000. Additionally, many thanks are due to Dr
Karsten Jacobsen and Dr Wilfred Linder for BLUH and LISA
software.
Disclosure statementNo potential conflict of interest was
reported by the authors.
ORCIDU. G. Sefercik
http://orcid.org/0000-0003-2403-5956
ReferencesAguilar MA, Saldana MM, Aguilar FJ. 2012. GeoEye-1 and
WorldView-2 pan-sharpened imagery for object-based
classification in urban environments. Int J Remote Sens.
34(7):2583–2606.Baatz M, Benz U, Dehghani S, Heynen M, Höltje A,
Hofmann P, Lingenfelder I, Mimler M, Sohlbach M, Weber M,
et al. 2004. Ecognition professional: user guide: 4. Munih:
Definiens Imaging; p. 486.Baiocchi V, Brigante R, Radicioni F.
2010. Three-dimensional multispectral classification and its
application to early
seismic damage assessment. Eur J Remote Sens.
42:49–65.Ballabeni, A, Apollonio, FI, Gaiani, M, Remondino, F.
2015. Advances in image pre-processing to improve automated
3d reconstruction. In: ISPRS – International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences;
25–27 Feb; Avila, Spain, 40(5), p. 315–323.
Baltsavias EP, Gruen A, Van Gool L. 2001. Automatic extraction
of man-made objects from aerial and space images (III). Ascona:
Taylor & Francis. A. A. Balkema.
Bedard N, Hagen N, Gao L, Tkaczyk TS. 2012. Image mapping
spectrometry: calibration and characterization. Optical Eng.
51(11):14.
Benarchid O, Raissouni N, El Adib S, Abbous A, Azyat A, Achhab
NB, Lahraoua M, Chahboun A. 2013. Building extraction using
object-based classification and shadow information in very high
resolution multispectral images, a case study: Tetuan, Morocco. Can
J Image Process Comput Vision. 4(1):1–8.
Benz UC, Hofmann P, Willhauck G, Lingenfelder I, Heynen M. 2004.
Multi-resolution, object-oriented fuzzy analysis of remote sensing
data for GIS-ready information. ISPRS J Photogramm Remote Sens.
58(3–4):239–258.
Bhadauria A, Bhadauria H, Kumar A. 2013. Building extraction
from satellite images. IOSR J Comput Eng. 12(2):76–81.Clark ML,
Clark DB, Roberts DA. 2004. Small-footprint lidar estimation of
sub-canopy elevation and tree height in a
tropical rain forest landscape. Remote Sens Environ.
91:68–89.Clode, S, Kootsookos, P, Rottensteiner F. 2004. The
automatic extraction of roads from LiDAR data. In: XXth ISPRS
Congress; 12–23 Jul; Istanbul 35. p. 231–236.Font M, Amorese D,
Lagarde J-L. 2010. DEM and GIS analysis of the stream gradient
index to evaluate effects of tectonics:
the normandy intraplate area (NW France). Geomorphology.
119(3–4):172–180.Fraser CS. 2003. Prospects for mapping from high
resolution satellite imagery. Asian J Geoinformatics.
4(1):3–10.Guidi, G, Gonizzi, S, Micoli, LL. 2014. Image
pre-processing for optimizing automated photogrammetry
performances.
In: ISPRS Annals of the Photogrammetry, Remote Sensing and
Spatial Information Sciences; 23–25 Jun; Riva del Garda, 2(5).
Hashemi, SAM. 2008. Automatic peaks extraction from normalized
digital surface model (ndsm). In: International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences;
3–11 Jul; Beijing, 37(3), pp. 491–496.
http://orcid.orghttp://orcid.org/0000-0003-2403-5956
-
GEOCARTO INTERNATIONAL 15
Heipke, C, Mayer, H, Wiedemann, C, Jamet, O. 1997. Evaluation of
automatic road extraction. In: 3D Reconstruction and Modeling of
Topographic Objects; 17–19 Sep; Stuttgart, IAPRS, 32(3) pp.
47–56.
Hirschmüller, H. 2005. Accurate and efficient stereo processing
by semi-global matching and mutual information. In: IEEE Conference
on Computer Vision and Pattern Recognition (CVPR); 20–26 Jun; San
Diego, CA, USA.
Hofmann, P. 2001. Detecting informal settlements from Ikonos
image data using methods of object oriented image analysis-an
example from Cape Town (South Africa). In: Jürgens C, editor.
Remote Sensing of Urban Areas / Fernerkundung in urbanen Rumen,
Regensburger Geographische Schriften; Munich: Regensburger
Geographische Schriften; p. 107–118.
Hong G. 2007. Image fusion, image registration, and radiometric
normalization for high resolution image processing [PhD].
Fredericton: University of New Brunswick.
Jain MK, Singh VP. 2005. DEM-based modelling of surface runoff
using diffusion wave equation. J Hydrol. 302 (1–4):107–126.
Jazayeri, I, Fraser, CS. 2008. Interest operators in close-range
object reconstruction. In: The International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences;
3–11 Jul; Beijing, 37(5), pp. 69–74.
Karantzalos, K, Paragios, N. 2009. Competing 3D priors for
object extraction in remote sensing data, In: Stilla U,
Rottensteiner F, Paparoditis N, editors. Object Extraction for 3D
City Models, Road Databases and Traffic Monitoring – Concepts,
Algorithms and Evaluation; 3–4 Sep; Paris, 38(3), pp. 127–132.
Li, J, Heap, AD. 2008. A review of spatial interpolation methods
for environmental scientists. Geoscience Australia, Record
2008/23.
Mancini, A, Frontoni, E, Zingaretti, P. 2009. A winner takes all
mechanism for automatic object extraction from multi-source data.
In: Geoinformatics, 17th International Conference, 12–14 Aug. p.
1–6; Fairfax, VA.
Maxwell T. 2005. Object-oriented classification of
pan-sharpening quickbird imagery and a fuzzy approach to improving
image segmentation efficiency [PhD]. Fredericton: University of New
Brunswick.
Meenakshisundaram V. 2005. Quality assesment of ikonos and
quickbird fused images for urban mapping [PhD]. Calgary: University
of Calgary.
Navalgund RR, Jayaraman V, Roy PS. 2007. Remote sensing
applications: an overview. Curr Sci. 93(12):1747–1766.Niederöst, M.
2000. Reliable reconstruction of buildings for digital map
revision. In: International Archives of
Photogrammetry and Remote Sensing; 16–23 Jul; Amsterdam, 38(3),
pp. 635–642.Nikolakopoulos KG. 2008. Comparison of nine fusion
techniques for very high resolution data. Photogramm Eng
Remote Sens. 74(5):647–659.Pedelty JA, Morisette JT, Smith JA.
2004. Comparison of Landsat-7 enhanced thematic mapper plus (ETM+)
and earth
observing one (EO-1) advanced land imager. Optical Eng.
43(4):954–962.Rahmani S, Strait M, Merkurjev D, Moeller M, Wittman
T. 2010. An adaptive IHS pan-sharpening method. IEEE Geosci
Remote Sens Lett. 7(4):746–750.Rani K, Sharma R. 2013. Study of
different image fusion algorithm. Int J Emerg Technol Adv Eng.
3(5):288–291.Schmidt F, Persson A. 2003. Comparison of DEM data
capture and topographic wetness indices. Precis Agric. 4(2):
179–192.Sefercik, U, Atesoglu, A. 2013. Uydu verileri
kullanılarak meşcere boyu belirlenmesine yönelik yeni bir
yaklaşım.
TUFUAB 7thTechnical Symposium; 23–25 May; Trabzon. p. 5.Shaw GA,
Burke HK. 2003. Spectral imaging for remote sensing. Lincoln Lab J.
14(1):3–28.Smreček R. 2012. Utilization of ALS data for forestry
purposes. In: Jekel T, Car A, Strobl J, Griesebner G, editors.
GI
forum 2012: geovizualisation, society and learning; Berlin:
Herbert Wichmann Verlag; p. 365–375.Sportouche H, Tupin F, Denise L
2009. Building extraction and 3D reconstruction in urban areas from
high resolution
optical and SAR imagery. In: Urban Remote Sensing Event, 20–22
May. Shanghai: Institute of Electrical and Electronics Engineers
(IEEE); p. 1–11.
Stereńczak K, Kozak J. 2011. Evaluation of digital terrain
models generated in forest conditions from airborne laser scanning
data acquired in two seasons. Scand J Forest Res.
26(4):374–384.
Stereńczak K, Będkowski K, Weinacker H. 2008. Accuracy of crown
segmentation and estimation of selected trees and forest stand
parameters in order to resolution of used DSM and nDSM models
generated from dense small footprint LIDAR data. In: International
Archives of the Photogrammetry, Remote Sensing and Spatial
Information Sciences; 3–11 Jul; Beijing, 37(6), pp. 27–32.
Straub BM, Gerke M, Koch A. 2001. Automatic extraction of trees
and buildings from image and height data in an urban environment.
In: Proceedings of the International Workshop on Geo-Spatial
Knowledge Processing for Natural Resource Management, 28–29 Jun;
Varese.
Theng LB. 2006. Automatic building extraction from satellite
imagery. Eng Lett. 13(3):255–259.Thompson JA, Bell JC, Butler CA.
2001. Digital elevation model resolution: effects on terrain
attribute calculation and
quantitative soil-landscape modeling. Geoderma.
100(1–2):67–89.Tian J, Chen DM. 2007. Optimization in multi‐scale
segmentation of high‐resolution satellite images for artificial
feature
recognition. Int J Remote Sens. 28(20):4625–4644.UTSA. 2013.
Object-oriented classification, Lecture 11. [online] (updated May
2016). [accessed 2016 Jun 6] http://www.
utsa.edu/lrsg/Teaching/EES5083/L11.ppt.
http://www.utsa.edu/lrsg/Teaching/EES5083/L11.ppthttp://www.utsa.edu/lrsg/Teaching/EES5083/L11.ppt
-
16 U. G. SEFERCIK ET AL.
Vassilopoulou S, Hurni L, Dietrich V, Baltsavias E, Pateraki M,
Lagios E, Parcharidis I. 2002. Orthophoto generation using IKONOS
imagery and high resolution DEM: a case study on volcanic hazard
monitoring of Nisyros Island (Greece). ISPRS J Photogramm Remote
Sens. 57(1–2):24–38.
Zhang, Y. 2002. A new automatic approach for effectively fusing
Landsat 7 as well as IKONOS images. In: Geoscience and Remote
Sensing Symposium, IGARSS; 24–28 Jun; Toronto.
Abstract1. Introduction2. Study area and materials3.
Methodology3.1. Image enhancement3.2. Manual and automatic object
extraction3.3. DSM, DTM, and nDSM generation and refinement
4. Results4.1. Manual extraction results4.2. Automatic
extraction results
5. ConclusionsAcknowledgementsDisclosure statementReferences