Embed Size (px)
DESCRIPTION
Vypracoval: Filip Koutský Vedoucí práce: Ing. Vít Ondroušek Ph.D. Návrh a implementace lokalizačního modulu pro autonomní mobilní robot. Cíl práce. - PowerPoint PPT Presentation
Citation preview

25. 7. 2007, BrnoPřipravil: Ing. Jaroslav Novotný
Návrh a implementace lokalizačního modulu pro autonomní mobilní robot
Vypracoval: Filip Koutský
Vedoucí práce: Ing. Vít Ondroušek Ph.D.

• Návrh a implementace konfigurovatelného modulu poskytujícího data o poloze, které bude schopen ukládat a přeposílat řídící jednotce autonomního mobilního robotu
• Odzkoušení modulu v reálném prostředí a vyhodnocení použitelnosti pro autonomní mobilní robot.
Cíl práce

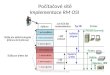
Schéma autonomního robotu
IRC senzory
Modul GPS/Galileo
Stejnosměrný motor
Servomotor řízení
HD kamery
Kompas
Lokalizační modul
Rozpoznávání obrazu
ArduinoŘízení motorů a
snímání dat z IRC senzoru a kompasu
Modul pro výpočet ackermanova pohybu
Mapový software
Hlavní řídicí program

Způsob komunikace a získávání dat ze senzoru
• Jednosměrná sériová komunikace
• Knihovna javax.comm
• Frekvence snímání 1Hz
• Formát NMEA 0183

Konfigurovatelnost modulu
• Textový konfigurační soubor• Nastavuje se výpis a logování

Logování dat
• Knihovna slf4j (Simple Logging Facade for Java)
• Jednotné logování• Nastavení jen potřebných dat• Výstup textový soubor a konzole• Zvlášť výstup pro GPS data

Grafické rozhraní
• Okno jen pro výpis• Výpis jen nastavených dat

Měření s lokalizačním modulem
• Arboretum Mendelovy univerzity
• 4 měření
• Zpracování v programu ArcGis
• Zjištění opakovatelnosti měření
• Vyhodnocení použitelnosti senzoru

Výsledky měření opakovatelnosti
50 100 150 200 250 300 350 400 4500
10
20
30
40
50
60
70
80
90
100
Procentuální obsažení bodů v odchylkách δ
První proti druhému
Druhé proti třetímu
Třetí proti prvnímu
Druhé proti čtvrtému
Třetí proti čtvrtému
Čtvrté proti prvnímu
Maximální vzdálenost bodů δmax[cm]
Mn
ožs
tví
bo
dů
vzd
ále
nýc
h m
axi
má
lně
o δ
[%
]


Závěr
• Vytvořen konfigurovatelný lokalizační modul
• Otestován v reálném prostředí a vyhodnocen
jako použitelný pro dané řešení
• Modul nadále využíván na autonomním robotu
• Využití modulu i při robotických soutěžích
• Možnost využití i pro jiné řídící jednotky
pracující s polohovými daty

Děkuji Vám za pozornost