Embed Size (px)
Citation preview
5. Modelowanie wybranych stanów pracy silników indukcyjnych
141
Fragment monografii autorstwa: Maria Dems, Krzysztof Komęza, „Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych”, Wyd. PŁ, 2011
5. MODELOWANIE WYBRANYCH STANÓW PRACY SILNIKÓW INDUKCYJNYCH
5.1. Rozruch bezpo średni silników indukcyjnych
Przy obliczaniu niektórych procesów przejściowych w silniku induk-cyjnym można w dużym uproszczeniu pominąć zjawiska nieustalone i korzystać ze statycznej charakterystyki mechanicznej silnika. Przy takim podejściu zakłada się, że przy rozruchu silnika w jego uzwojeniach po-wstają natychmiast prądy ustalone odpowiadające prędkości równej ze-ru, których wzajemne oddziaływanie wywołuje natychmiastowe wystą-pienie momentu rozruchowego.
W rzeczywistym silniku wartość maksymalna momentu w początko-wym okresie rozruchu jest kilkukrotnie większa od statycznego momentu rozruchowego ze względu na to, że wartości maksymalne prądów silnika podczas procesu przejściowego są znacznie większe niż amplitudy prą-dów ustalonych.
Występujące w silniku prądy ustalone i przejściowe wytwarzają stru-mienie rozproszenia, które mogą wzmacniać, lub osłabiać pole główne wytworzone przez prądy ustalone, powodując w ten sposób odpowiednie zwiększenie lub zmniejszenie przejściowego momentu elektromagne-tycznego. W wyniku oddziaływania prądów przejściowych, pola magne-tyczne mogą nawet w pewnej chwili być tak skierowane, że znajdujące się obok siebie bieguny magnetyczne stojana i wirnika będą się odpy-chać i działać na wirnik w kierunku przeciwnym do kierunku wirowania. W takiej chwili moment elektromagnetyczny silnika staje się ujemny, a w przebiegu krzywej prędkości obrotowej pojawia się wklęśnięcie.
Elektromagnetyczne procesy przejściowe zachodzące podczas roz-ruchu zostają praktycznie stłumione, gdy silnik osiąga prędkość przekra-czającą poślizg krytyczny. Przy dalszym zwiększaniu prędkości obroto-wej, wartości prądów przejściowych ulegają gwałtownym zmianom, jed-nak, na skutek oddziaływania indukcyjności uzwojeń, zmiany prądów opóźniają się względem zmian prędkości. W związku z tym, gdy pręd-kość osiągnie wartość prędkości synchronicznej, prądy w wirniku mogą
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
142
być różne od zera, a więc moment elektromagnetyczny też nie będzie równy zeru. Przy zwiększaniu się prędkości silnika powyżej wartości syn-chronicznej, prądy w wirniku maleją, a wraz z nimi maleje moment, przyjmując wartości ujemne, co powoduje zmniejszenie prędkości. Tak więc, w końcowym okresie stanu przejściowego, prędkość i moment sil-nika mogą mieć charakter drgań tłumionych [185].
Na przebiegi rozruchowe silnika indukcyjnego istotny wpływ mają na-stępujące czynniki: • faza początkowa napięcia zasilającego, której wartość wpływa na
składowe aperiodyczne prądów w poszczególnych uzwojeniach fa-zowych silnika,
• moment bezwładności układu napędowego, determinujący czas trwania procesu przejściowego oraz występujące podczas rozruchu oscylacje momentu elektromagnetycznego silnika,
• wartość momentu obciążenia na wale silnika, której wzrost daje po-dobne zmiany przebiegów przejściowych, jak wzrost momentu bez-władności układu napędowego,
• temperatura uzwojeń stojana i wirnika, wpływająca zarówno na war-tości szczytowe momentu elektromagnetycznego jak i czas rozruchu. Prawidłowe określenie temperatury uzwojeń podczas rozruchu ma
szczególne znaczenie przy długotrwałych, ciężkich rozruchach silników indukcyjnych dużych mocy, dokonujących rozruchu w przypadku pełnego obciążenia momentem znamionowym na wale silnika.
5.2.1. Modelowanie rozruchu bezpo średniego silnika z wyko-rzystaniem modelu obwodowego
Przy modelowaniu rozruchu silnika z wykorzystaniem modelu obwo-dowego (2.52) i opracowanego na jego podstawie programu DYN, należy określić fazę początkową napięcia zasilającego silnik, moment bezwład-ności układu napędowego, moment obciążenia (wentylatorowy lub stały), szacunkową temperaturę uzwojeń maszyny oraz czas końcowy obliczeń. Ponadto należy również określić warunki początkowe, w postaci:
czas, Re(Is), Re(Ir1),...,Re(IrN), Im(Is), Im(Ir1),...,Im(IrN), ω, ϕ,
Re(Ψs), Re(Ψr1),…, Re(ΨrN), Im(Ψs), Im(Ψr1),...,Im(ΨrN)
gdzie Re(..), Im(..) – część rzeczywista i urojona prądów lub strumieni skojarzonych, ω - prędkość kątowa wirnika elektryczna, ϕ - kąt położenia wirnika względem stojana.
Przy pierwszym rozruchu silnika zakłada się zerowe wartości wszyst-kich warunków początkowych, natomiast dla restartu silnika warunki te zapisują się automatycznie.
5. Modelowanie wybranych stanów pracy silników indukcyjnych
143
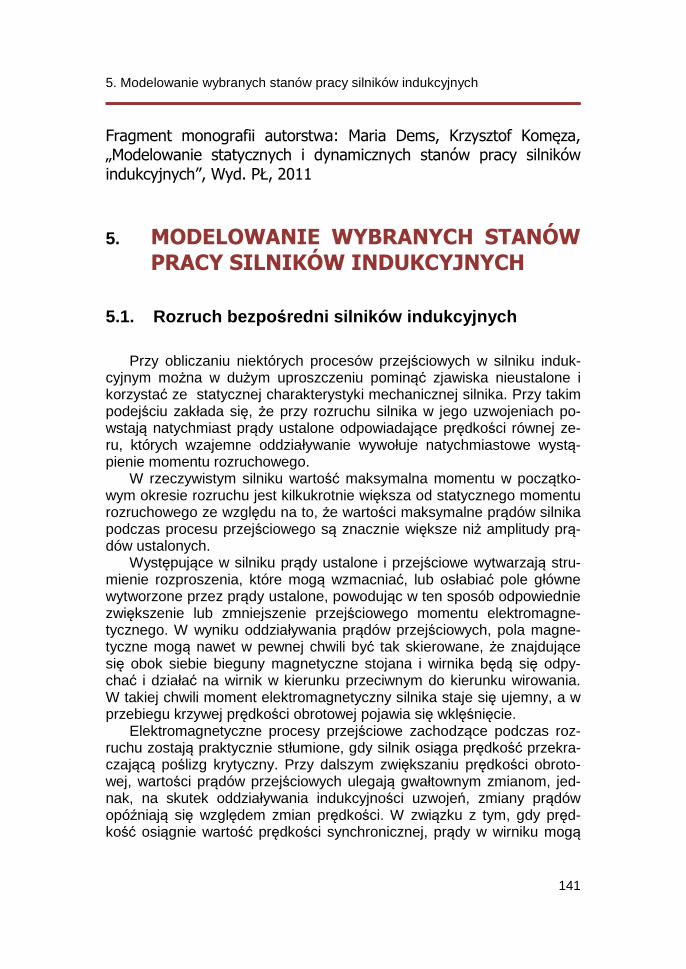
Przykładowe wyniki obliczeń przebiegów prądów, momentu elektro-magnetycznego i prędkości obrotowej w funkcji czasu dla silnika o da-nych znamionowych podanych w rozdziale 5.1 obliczone z wykorzysta-niem programu DYN dla różnych wartości napięcia zasilającego (U = 192,8 V, U =231 V oraz U = 245 V - uzwojenia połączone w trójkąt). podano odpowiednio na rys.5.11 – 5.14. Przyjęto, że moment bezwład-ności układu napędowego wynosi J = 2*Js (Js = 0,00154 [kgm2]). Dla po-równania podano również wyniki pomiarów dla modelowanych przypadków.
-8
-6
-4
-2
0
2
4
6
8
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t[s]
is [A]
pomiary
obliczenia
-2
0
2
4
6
8
10
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t[s]
M[Nm]
pomiary
obliczenia
Rys.5.11. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prądu fazowego stojana oraz momentu elektromagnetycznego podczas rozru-
chu bezpośredniego silnika, U = 193V (trójkąt)
-8
-6
-4
-2
0
2
4
6
8
10
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t[s]
is [A]
obliczenia
pomiary
-2
0
2
4
6
8
10
12
14
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t[s]
M[Nm]
obliczenia
pomiary
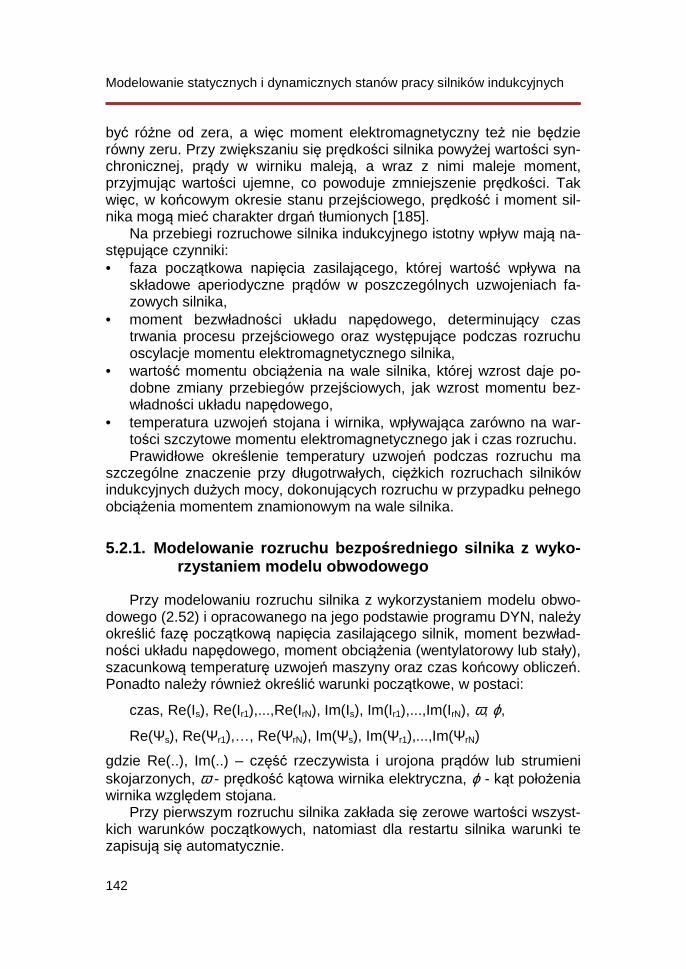
Rys.5.12. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prądu fazowego stojana oraz momentu elektromagnetycznego podczas rozru-
chu bezpośredniego silnika, U = 231V (trójkąt)
-200
0
200
400
600
800
1000
1200
1400
1600
1800
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t[s]
n[obr/min]
U=192,8 V
U=231 V
0
200
400
600
800
1000
1200
1400
1600
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16
t [s]
n[obr/min]
pomiary
obliczenia
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
144
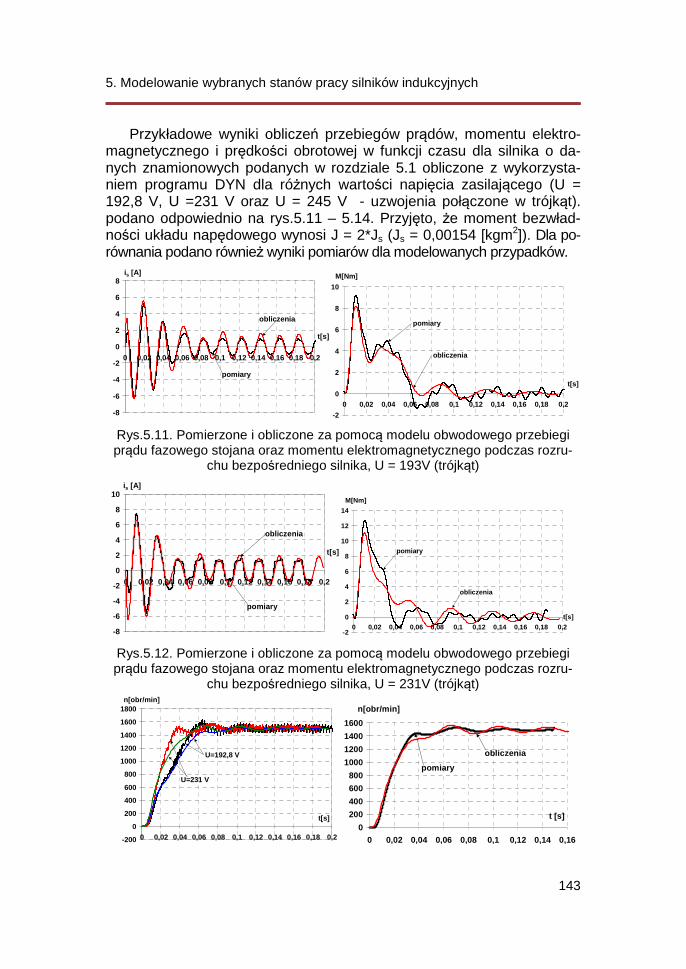
Rys.5.13. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prędkości obrotowej wirnika podczas rozruchu bezpośredniego silnika, dla na-
pięcia zasilającego U = 193, 231V i 245 V (trójkąt)
-8
-6
-4
-2
0
2
4
6
8
10
0 0,02 0,04 0,06 0,08 0,1
t [s]
is [A]
obliczenia
pomiary
-2
0
2
4
6
8
10
12
14
0 0,02 0,04 0,06 0,08 0,1 0,12t [s]
M [Nm]
obliczeniapomiary
Rys.5.14. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prądu fazowego stojana oraz momentu elektromagnetycznego podczas rozru-
chu bezpośredniego silnika, U = 245V (trójkąt)
Zaproponowany model obwodowy pozwala obliczać tylko podstawo-wą harmoniczną przebiegów, a więc nie uwzględnia odkształceń charak-terystyk prądu i momentu elektromagnetycznego wynikających z obec-ności wyższych harmonicznych, których udział nawet przy zasilaniu na-pięciem sieciowym przy połączeniu uzwojeń silnika w trójkąt jest zauwa-żalny [99, 116, 117, 168].
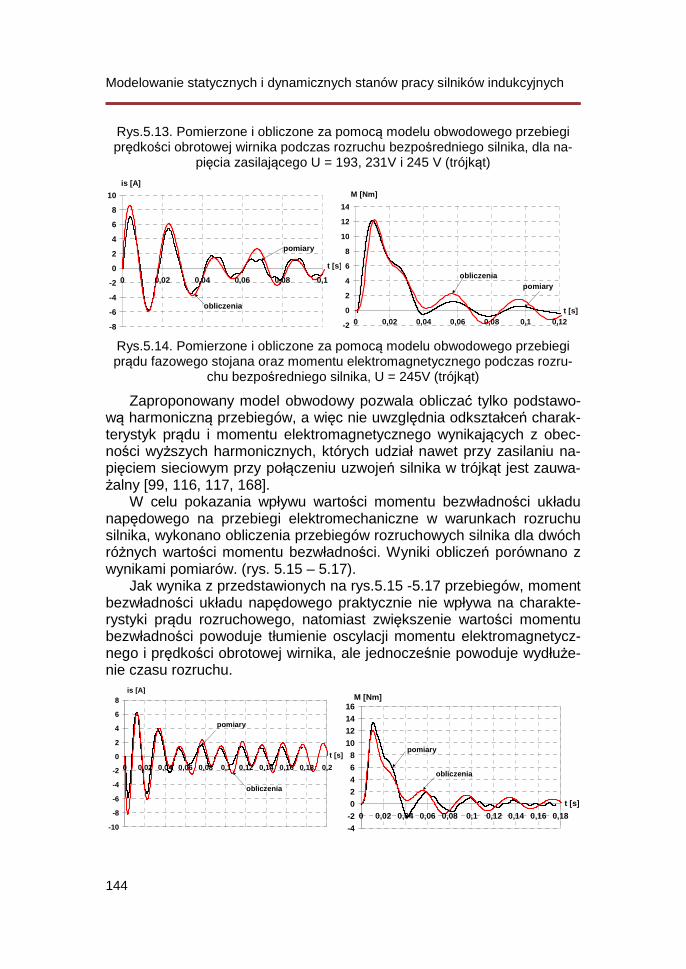
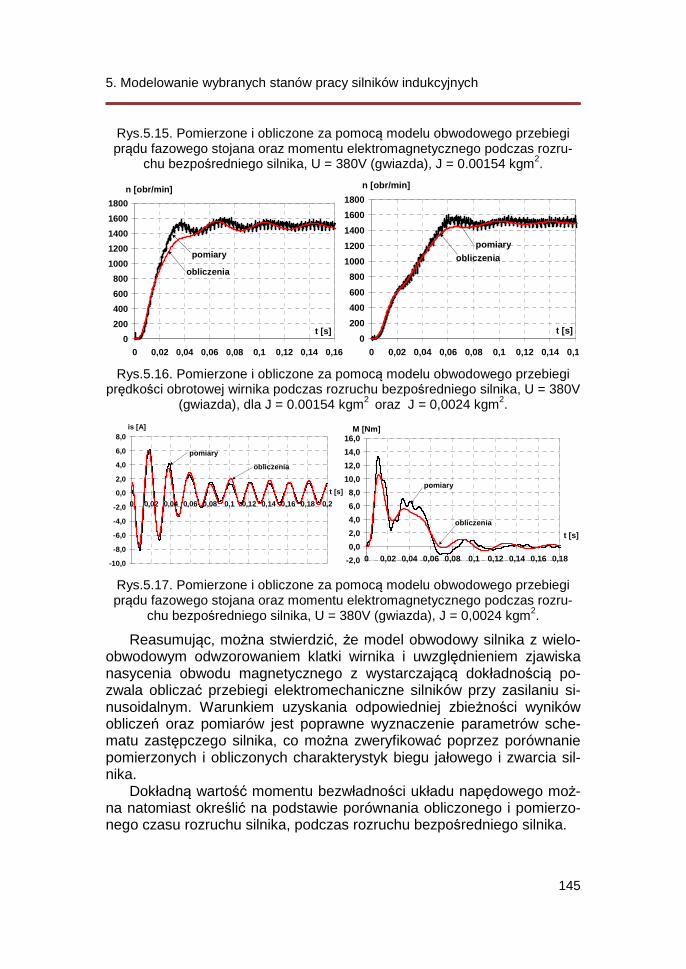
W celu pokazania wpływu wartości momentu bezwładności układu napędowego na przebiegi elektromechaniczne w warunkach rozruchu silnika, wykonano obliczenia przebiegów rozruchowych silnika dla dwóch różnych wartości momentu bezwładności. Wyniki obliczeń porównano z wynikami pomiarów. (rys. 5.15 – 5.17).
Jak wynika z przedstawionych na rys.5.15 -5.17 przebiegów, moment bezwładności układu napędowego praktycznie nie wpływa na charakte-rystyki prądu rozruchowego, natomiast zwiększenie wartości momentu bezwładności powoduje tłumienie oscylacji momentu elektromagnetycz-nego i prędkości obrotowej wirnika, ale jednocześnie powoduje wydłuże-nie czasu rozruchu.
-10
-8
-6
-4
-2
0
2
4
6
8
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t [s]
is [A]
obliczenia
pomiary
-4-2
0246
810
121416
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18
t [s]
M [Nm]
pomiary
obliczenia
5. Modelowanie wybranych stanów pracy silników indukcyjnych
145
Rys.5.15. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prądu fazowego stojana oraz momentu elektromagnetycznego podczas rozru-
chu bezpośredniego silnika, U = 380V (gwiazda), J = 0.00154 kgm2.
0
200
400
600
800
1000
1200
1400
1600
1800
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16
t [s]
n [obr/min]
obliczenia
pomiary
0
200
400
600
800
1000
1200
1400
1600
1800
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16
t [s]
n [obr/min]
obliczeniapomiary
Rys.5.16. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prędkości obrotowej wirnika podczas rozruchu bezpośredniego silnika, U = 380V
(gwiazda), dla J = 0.00154 kgm2 oraz J = 0,0024 kgm2.
-10,0
-8,0
-6,0
-4,0
-2,0
0,0
2,0
4,0
6,0
8,0
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
t [s]
is [A]
obliczenia
pomiary
-2,0
0,0
2,0
4,0
6,0
8,0
10,0
12,0
14,0
16,0
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18
t [s]
M [Nm]
pomiary
obliczenia
Rys.5.17. Pomierzone i obliczone za pomocą modelu obwodowego przebiegi prądu fazowego stojana oraz momentu elektromagnetycznego podczas rozru-
chu bezpośredniego silnika, U = 380V (gwiazda), J = 0,0024 kgm2.
Reasumując, można stwierdzić, że model obwodowy silnika z wielo-obwodowym odwzorowaniem klatki wirnika i uwzględnieniem zjawiska nasycenia obwodu magnetycznego z wystarczającą dokładnością po-zwala obliczać przebiegi elektromechaniczne silników przy zasilaniu si-nusoidalnym. Warunkiem uzyskania odpowiedniej zbieżności wyników obliczeń oraz pomiarów jest poprawne wyznaczenie parametrów sche-matu zastępczego silnika, co można zweryfikować poprzez porównanie pomierzonych i obliczonych charakterystyk biegu jałowego i zwarcia sil-nika.
Dokładną wartość momentu bezwładności układu napędowego moż-na natomiast określić na podstawie porównania obliczonego i pomierzo-nego czasu rozruchu silnika, podczas rozruchu bezpośredniego silnika.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
146
5.2. Wybieg silnika indukcyjnego
Pod pojęciem wybiegu należy rozumieć procesy przejściowe zacho-dzące w silniku przy zmianie prędkości obrotowej w funkcji czasu od war-tości ustalonej, aż do zatrzymania się napędu. Rozróżniamy kilka rodza-jów wybiegu [130, 177]: • Wybieg częściowy, który zachodzi wówczas, gdy załączenie napięcia
nastąpi przed zatrzymaniem się napędu. • Wybieg swobodny występujący wtedy, gdy wybiega sam silnik, bez
obciążenia mechanicznego. • Wybieg indywidualny to wybieg pojedynczego zespołu napędowego,
po odłączeniu silnika od zasilania. • Wybieg grupowy to proces, jakiemu podlega grupa silników, zasilana
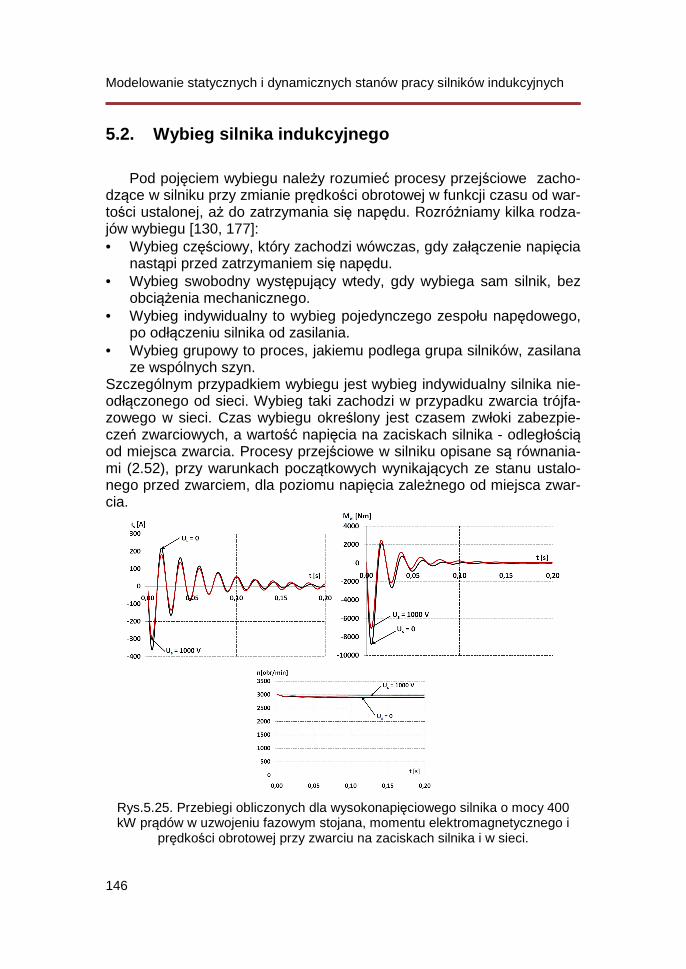
ze wspólnych szyn. Szczególnym przypadkiem wybiegu jest wybieg indywidualny silnika nie-odłączonego od sieci. Wybieg taki zachodzi w przypadku zwarcia trójfa-zowego w sieci. Czas wybiegu określony jest czasem zwłoki zabezpie-czeń zwarciowych, a wartość napięcia na zaciskach silnika - odległością od miejsca zwarcia. Procesy przejściowe w silniku opisane są równania-mi (2.52), przy warunkach początkowych wynikających ze stanu ustalo-nego przed zwarciem, dla poziomu napięcia zależnego od miejsca zwar-cia.
Rys.5.25. Przebiegi obliczonych dla wysokonapięciowego silnika o mocy 400 kW prądów w uzwojeniu fazowym stojana, momentu elektromagnetycznego i
prędkości obrotowej przy zwarciu na zaciskach silnika i w sieci.
5. Modelowanie wybranych stanów pracy silników indukcyjnych
147
Obliczone za pomocą modelu obwodowego przykładowe przebiegi prądu w uzwojeniu stojana, momentu elektromagnetycznego i prędkości obrotowej dla dwubiegunowego silnika dwuklatkowego o mocy 400 kW i napięciu znamionowym 6 kV przy zwarciu bezpośrednio na zaciskach silnika (Us = 0) oraz przy zwarciu w sieci, przy którym napięcie na zaci-skach silnika spadło do wartości Us = 1000 V, podano na rys.5.25.
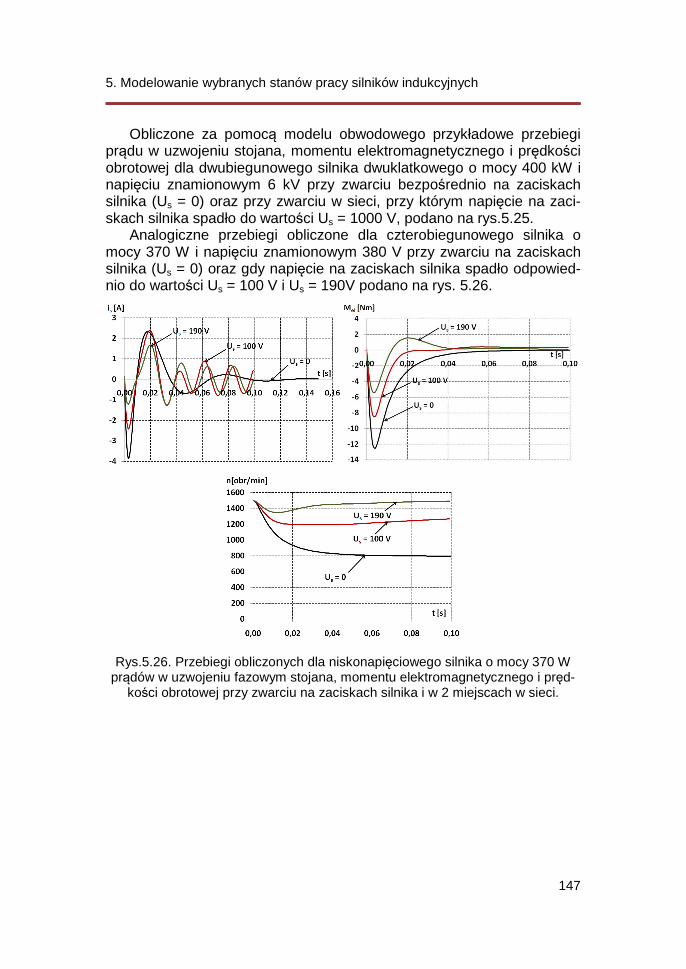
Analogiczne przebiegi obliczone dla czterobiegunowego silnika o mocy 370 W i napięciu znamionowym 380 V przy zwarciu na zaciskach silnika (Us = 0) oraz gdy napięcie na zaciskach silnika spadło odpowied-nio do wartości Us = 100 V i Us = 190V podano na rys. 5.26.
Rys.5.26. Przebiegi obliczonych dla niskonapięciowego silnika o mocy 370 W prądów w uzwojeniu fazowym stojana, momentu elektromagnetycznego i pręd-
kości obrotowej przy zwarciu na zaciskach silnika i w 2 miejscach w sieci.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
148
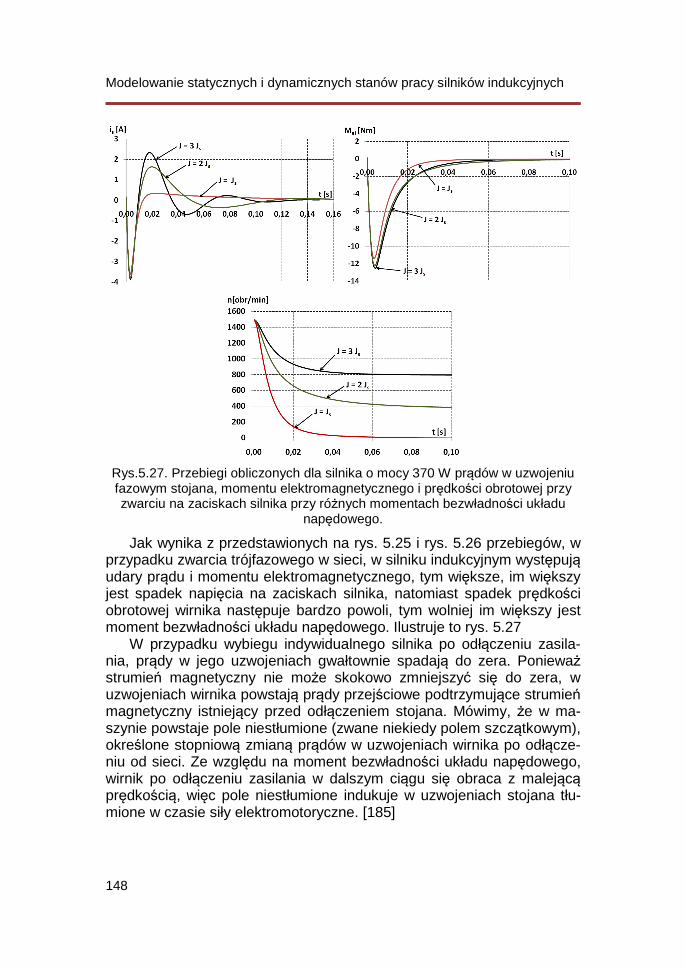
Rys.5.27. Przebiegi obliczonych dla silnika o mocy 370 W prądów w uzwojeniu fazowym stojana, momentu elektromagnetycznego i prędkości obrotowej przy zwarciu na zaciskach silnika przy różnych momentach bezwładności układu
napędowego.
Jak wynika z przedstawionych na rys. 5.25 i rys. 5.26 przebiegów, w przypadku zwarcia trójfazowego w sieci, w silniku indukcyjnym występują udary prądu i momentu elektromagnetycznego, tym większe, im większy jest spadek napięcia na zaciskach silnika, natomiast spadek prędkości obrotowej wirnika następuje bardzo powoli, tym wolniej im większy jest moment bezwładności układu napędowego. Ilustruje to rys. 5.27
W przypadku wybiegu indywidualnego silnika po odłączeniu zasila-nia, prądy w jego uzwojeniach gwałtownie spadają do zera. Ponieważ strumień magnetyczny nie może skokowo zmniejszyć się do zera, w uzwojeniach wirnika powstają prądy przejściowe podtrzymujące strumień magnetyczny istniejący przed odłączeniem stojana. Mówimy, że w ma-szynie powstaje pole niestłumione (zwane niekiedy polem szczątkowym), określone stopniową zmianą prądów w uzwojeniach wirnika po odłącze-niu od sieci. Ze względu na moment bezwładności układu napędowego, wirnik po odłączeniu zasilania w dalszym ciągu się obraca z malejącą prędkością, więc pole niestłumione indukuje w uzwojeniach stojana tłu-mione w czasie siły elektromotoryczne. [185]
5. Modelowanie wybranych stanów pracy silników indukcyjnych
149
Ponieważ po odłączeniu silnika od sieci prądy w uzwojeniach stojana maleją do zera, również moment elektromagnetyczny spada do zera, a układ równań (2.52) ulega uproszczeniu do postaci:
( )( )
m
s
MJp
dtd
RLKjjLdtd
−=
−−−= −
ω
ωω }{][}{][][]1[][}{ 1 III (5.1)
przy czym wektor prądu silnika ma postać:
TrNrr III ),.....,,,0( 21=I (5.2)
Napięcie indukowane w uzwojeniach stojana przez niestłumione prą-dy wirnika oblicza się z zależności:
+
= ∑∑
==
N
iris
N
irimsr IjI
dtd
LU11
ω (5.3)
Warunki początkowe dla układu równań (5.1) wynikają ze stanu usta-lonego przed odłączeniem silnika, przy czym wartości początkowe prą-dów stojana są zerowane. W związku z tym są one w postaci:
0, 0, Re(Ir1),...,Re(IrN), 0, Im(Ir1),...,Im(IrN), ω, ϕ,
Re(Ψs), Re(Ψr1),…, Re(ΨrN), Im(Ψs), Im(Ψr1),...,Im(ΨrN)
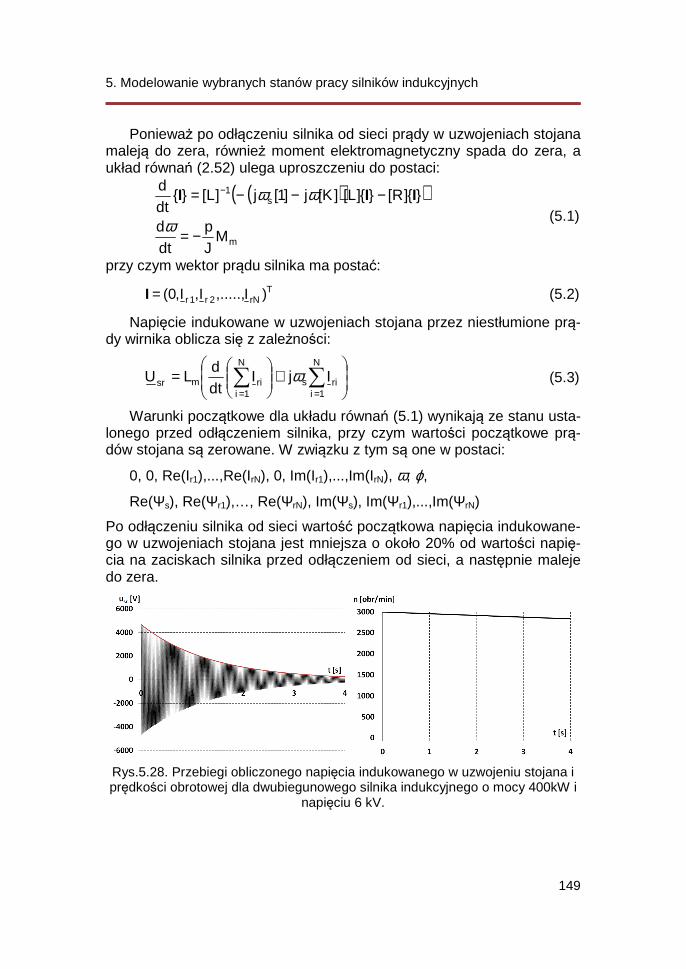
Po odłączeniu silnika od sieci wartość początkowa napięcia indukowane-go w uzwojeniach stojana jest mniejsza o około 20% od wartości napię-cia na zaciskach silnika przed odłączeniem od sieci, a następnie maleje do zera.
Rys.5.28. Przebiegi obliczonego napięcia indukowanego w uzwojeniu stojana i prędkości obrotowej dla dwubiegunowego silnika indukcyjnego o mocy 400kW i
napięciu 6 kV.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
150
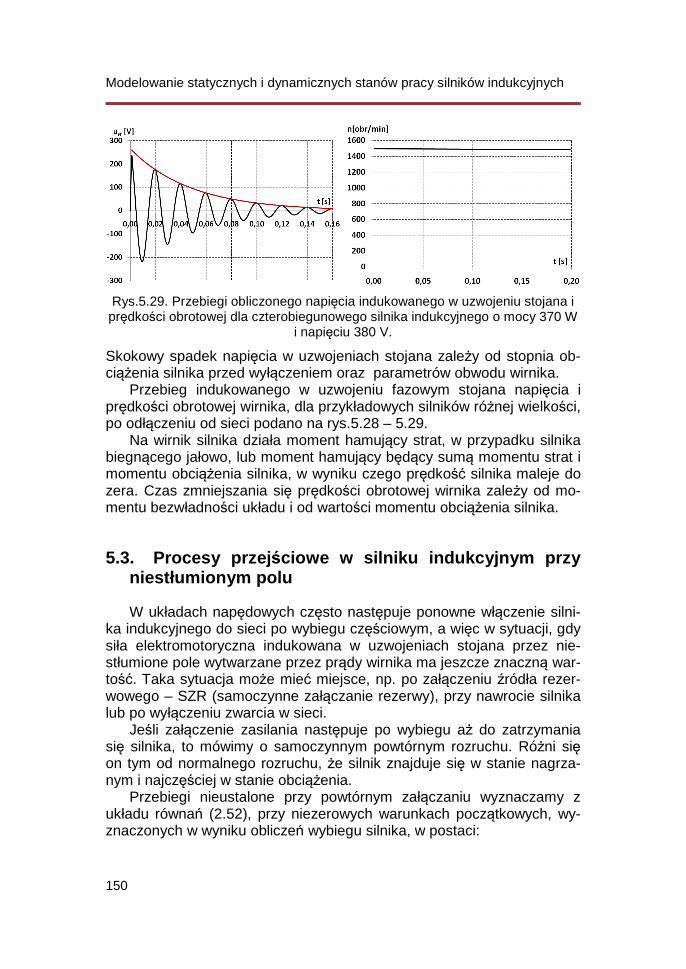
Rys.5.29. Przebiegi obliczonego napięcia indukowanego w uzwojeniu stojana i prędkości obrotowej dla czterobiegunowego silnika indukcyjnego o mocy 370 W
i napięciu 380 V.
Skokowy spadek napięcia w uzwojeniach stojana zależy od stopnia ob-ciążenia silnika przed wyłączeniem oraz parametrów obwodu wirnika.
Przebieg indukowanego w uzwojeniu fazowym stojana napięcia i prędkości obrotowej wirnika, dla przykładowych silników różnej wielkości, po odłączeniu od sieci podano na rys.5.28 – 5.29.
Na wirnik silnika działa moment hamujący strat, w przypadku silnika biegnącego jałowo, lub moment hamujący będący sumą momentu strat i momentu obciążenia silnika, w wyniku czego prędkość silnika maleje do zera. Czas zmniejszania się prędkości obrotowej wirnika zależy od mo-mentu bezwładności układu i od wartości momentu obciążenia silnika.
5.3. Procesy przej ściowe w silniku indukcyjnym przy niestłumionym polu
W układach napędowych często następuje ponowne włączenie silni-ka indukcyjnego do sieci po wybiegu częściowym, a więc w sytuacji, gdy siła elektromotoryczna indukowana w uzwojeniach stojana przez nie-stłumione pole wytwarzane przez prądy wirnika ma jeszcze znaczną war-tość. Taka sytuacja może mieć miejsce, np. po załączeniu źródła rezer-wowego – SZR (samoczynne załączanie rezerwy), przy nawrocie silnika lub po wyłączeniu zwarcia w sieci.
Jeśli załączenie zasilania następuje po wybiegu aż do zatrzymania się silnika, to mówimy o samoczynnym powtórnym rozruchu. Różni się on tym od normalnego rozruchu, że silnik znajduje się w stanie nagrza-nym i najczęściej w stanie obciążenia.
Przebiegi nieustalone przy powtórnym załączaniu wyznaczamy z układu równań (2.52), przy niezerowych warunkach początkowych, wy-znaczonych w wyniku obliczeń wybiegu silnika, w postaci:
5. Modelowanie wybranych stanów pracy silników indukcyjnych
151
0, 0, Re(Ir1),...,Re(IrN), 0, Im(Ir1),...,Im(IrN), ω, ϕ,
Re(Ψs), Re(Ψr1),…, Re(ΨrN), Im(Ψs), Im(Ψr1),...,Im(ΨrN)
Przy włączeniu silnika indukcyjnego do sieci, w przypadku, gdy istnie-je w nim pole niestłumione, do zacisków silnika doprowadzane jest na-pięcie:
)()()( tetutu srs += (5.4)
gdzie: us(t) – wartość chwilowa napięcia sieci, esr(t) – wartość chwilowa siły elektromotorycznej indukowanej w uzwojeniu stojana przez niestłu-mione prądy wirnika.
Wartość tego napięcia dla t = 0 zależy od wartości i fazy początkowej napięcia sieci i siły elektromotorycznej w uzwojeniach stojana w chwili powtórnego włączenia silnika. Przy krótkim czasie przerwy beznapięcio-wej może zaistnieć przypadek, gdy u(t) ≈ 1.8 us (t), co może spowodo-wać bardzo duże udary prądu i momentu przejściowego. Tak więc, przy powtórnym załączaniu silnika indukcyjnego zarówno prądy chwilowe jak i moment elektromagnetyczny są zależne od fazy początkowej napięcia sieciowego, gdyż wzajemny układ faz napięcia sieciowego i indukowanej siły elektromotorycznej wpływa na wartość napięcia różnicowego działa-jącego na silnik.
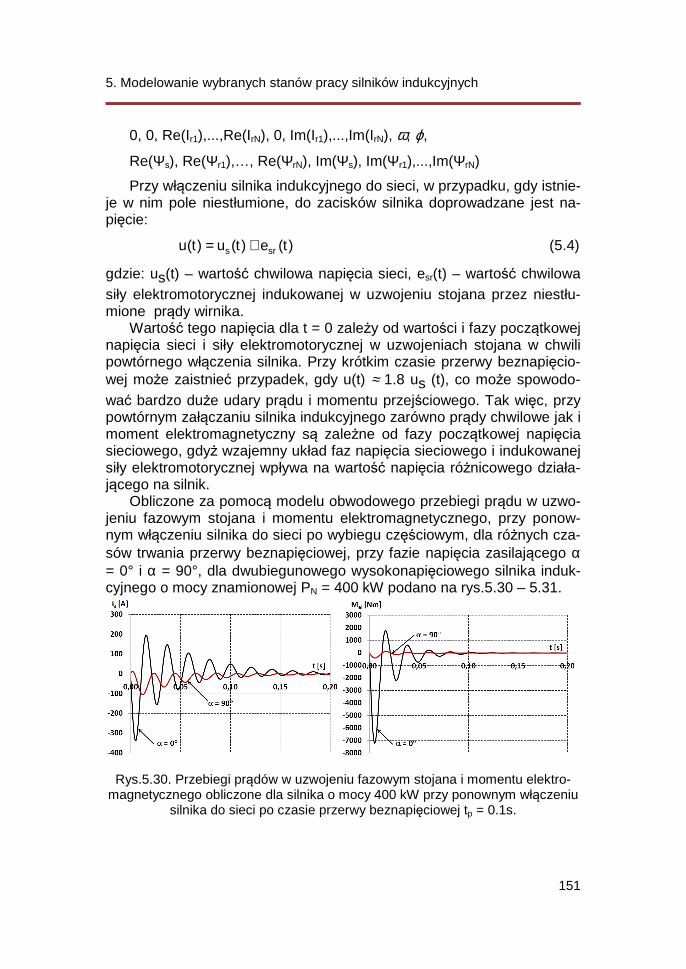
Obliczone za pomocą modelu obwodowego przebiegi prądu w uzwo-jeniu fazowym stojana i momentu elektromagnetycznego, przy ponow-nym włączeniu silnika do sieci po wybiegu częściowym, dla różnych cza-sów trwania przerwy beznapięciowej, przy fazie napięcia zasilającego α = 0° i α = 90°, dla dwubiegunowego wysokonapięciowego silnika induk-cyjnego o mocy znamionowej PN = 400 kW podano na rys.5.30 – 5.31.
Rys.5.30. Przebiegi prądów w uzwojeniu fazowym stojana i momentu elektro-
magnetycznego obliczone dla silnika o mocy 400 kW przy ponownym włączeniu silnika do sieci po czasie przerwy beznapięciowej tp = 0.1s.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
152
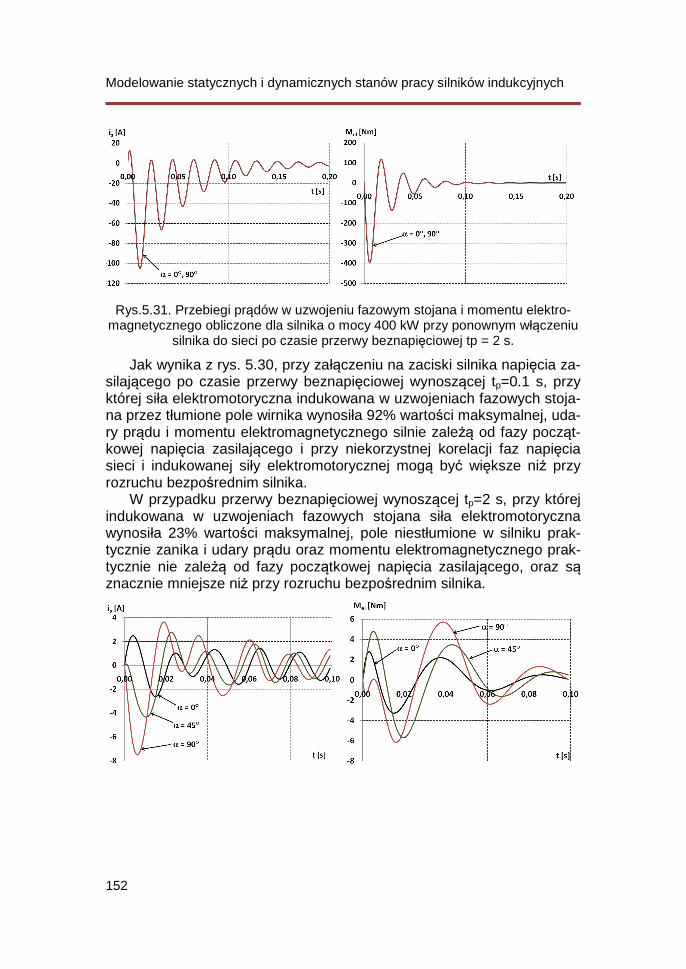
Rys.5.31. Przebiegi prądów w uzwojeniu fazowym stojana i momentu elektro-
magnetycznego obliczone dla silnika o mocy 400 kW przy ponownym włączeniu silnika do sieci po czasie przerwy beznapięciowej tp = 2 s.
Jak wynika z rys. 5.30, przy załączeniu na zaciski silnika napięcia za-silającego po czasie przerwy beznapięciowej wynoszącej tp=0.1 s, przy której siła elektromotoryczna indukowana w uzwojeniach fazowych stoja-na przez tłumione pole wirnika wynosiła 92% wartości maksymalnej, uda-ry prądu i momentu elektromagnetycznego silnie zależą od fazy począt-kowej napięcia zasilającego i przy niekorzystnej korelacji faz napięcia sieci i indukowanej siły elektromotorycznej mogą być większe niż przy rozruchu bezpośrednim silnika.
W przypadku przerwy beznapięciowej wynoszącej tp=2 s, przy której indukowana w uzwojeniach fazowych stojana siła elektromotoryczna wynosiła 23% wartości maksymalnej, pole niestłumione w silniku prak-tycznie zanika i udary prądu oraz momentu elektromagnetycznego prak-tycznie nie zależą od fazy początkowej napięcia zasilającego, oraz są znacznie mniejsze niż przy rozruchu bezpośrednim silnika.
5. Modelowanie wybranych stanów pracy silników indukcyjnych
153
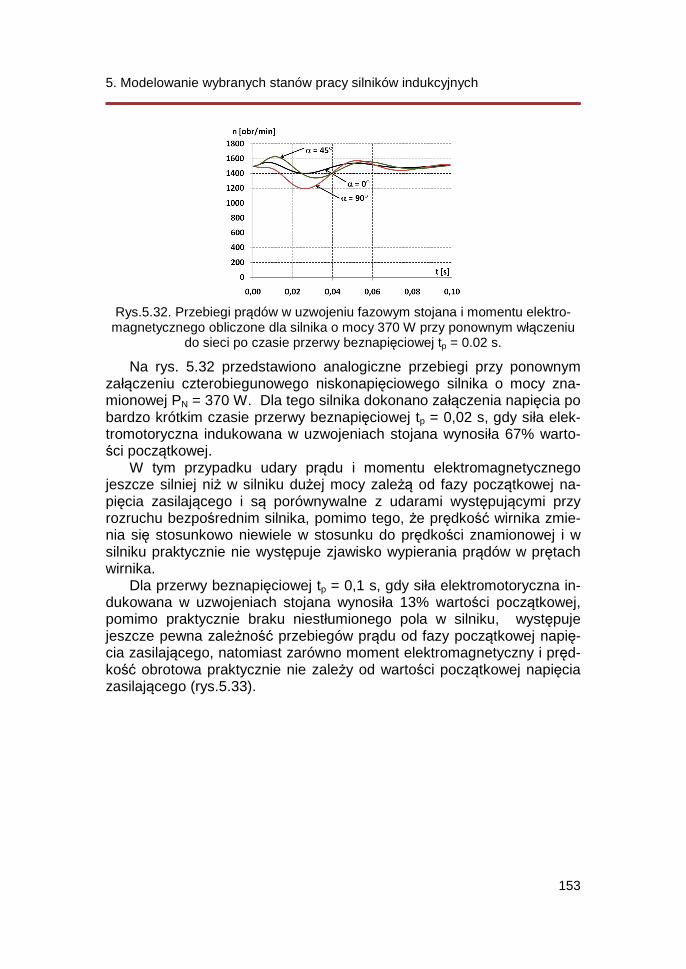
Rys.5.32. Przebiegi prądów w uzwojeniu fazowym stojana i momentu elektro-
magnetycznego obliczone dla silnika o mocy 370 W przy ponownym włączeniu do sieci po czasie przerwy beznapięciowej tp = 0.02 s.
Na rys. 5.32 przedstawiono analogiczne przebiegi przy ponownym załączeniu czterobiegunowego niskonapięciowego silnika o mocy zna-mionowej PN = 370 W. Dla tego silnika dokonano załączenia napięcia po bardzo krótkim czasie przerwy beznapięciowej tp = 0,02 s, gdy siła elek-tromotoryczna indukowana w uzwojeniach stojana wynosiła 67% warto-ści początkowej.
W tym przypadku udary prądu i momentu elektromagnetycznego jeszcze silniej niż w silniku dużej mocy zależą od fazy początkowej na-pięcia zasilającego i są porównywalne z udarami występującymi przy rozruchu bezpośrednim silnika, pomimo tego, że prędkość wirnika zmie-nia się stosunkowo niewiele w stosunku do prędkości znamionowej i w silniku praktycznie nie występuje zjawisko wypierania prądów w prętach wirnika.
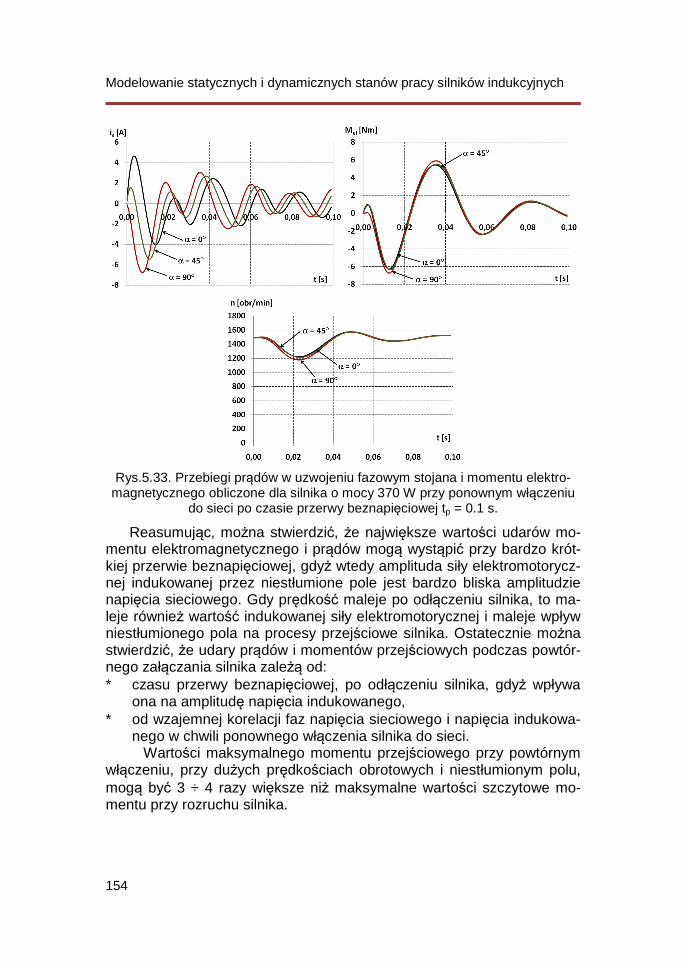
Dla przerwy beznapięciowej tp = 0,1 s, gdy siła elektromotoryczna in-dukowana w uzwojeniach stojana wynosiła 13% wartości początkowej, pomimo praktycznie braku niestłumionego pola w silniku, występuje jeszcze pewna zależność przebiegów prądu od fazy początkowej napię-cia zasilającego, natomiast zarówno moment elektromagnetyczny i pręd-kość obrotowa praktycznie nie zależy od wartości początkowej napięcia zasilającego (rys.5.33).
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
154
Rys.5.33. Przebiegi prądów w uzwojeniu fazowym stojana i momentu elektro-
magnetycznego obliczone dla silnika o mocy 370 W przy ponownym włączeniu do sieci po czasie przerwy beznapięciowej tp = 0.1 s.
Reasumując, można stwierdzić, że największe wartości udarów mo-mentu elektromagnetycznego i prądów mogą wystąpić przy bardzo krót-kiej przerwie beznapięciowej, gdyż wtedy amplituda siły elektromotorycz-nej indukowanej przez niestłumione pole jest bardzo bliska amplitudzie napięcia sieciowego. Gdy prędkość maleje po odłączeniu silnika, to ma-leje również wartość indukowanej siły elektromotorycznej i maleje wpływ niestłumionego pola na procesy przejściowe silnika. Ostatecznie można stwierdzić, że udary prądów i momentów przejściowych podczas powtór-nego załączania silnika zależą od: ∗ czasu przerwy beznapięciowej, po odłączeniu silnika, gdyż wpływa
ona na amplitudę napięcia indukowanego, ∗ od wzajemnej korelacji faz napięcia sieciowego i napięcia indukowa-
nego w chwili ponownego włączenia silnika do sieci. Wartości maksymalnego momentu przejściowego przy powtórnym
włączeniu, przy dużych prędkościach obrotowych i niestłumionym polu, mogą być 3 ÷ 4 razy większe niż maksymalne wartości szczytowe mo-mentu przy rozruchu silnika.

5. Modelowanie wybranych stanów pracy silników indukcyjnych
155
5.4.1. Nawrót silnika indukcyjnego
Większość silników indukcyjnych stosowanych w układach napędo-wych przeznaczona jest do pracy ciągłej. Można jednak spotkać układy napędowe, w których występuje praca silników przerywana lub doryw-cza. Przy pracy przerywanej silnika może wystąpić nawrót silnika z po-lem niestłumionym, polegający na chwilowym odłączeniu napięcia zasila-jącego i ponownym włączeniu silnika do sieci przy zmienionej kolejności faz napięcia zasilającego [185]. Występujący w takim przypadku czas przerwy beznapięciowej jest na ogół bardzo krótki, warunkowany szyb-kością działania łączników, a więc jest na ogół zbyt krótki, aby mogło nastąpić stłumienie pola magnetycznego wytwarzanego przez prądy wir-nika.
Istotna różnica pomiędzy nawrotem a ponownym załączaniem polega na tym, że przy ponownym załączaniu napięcie wypadkowe, będące su-mą napięcia indukowanego w uzwojeniach stojana przez niestłumione pole i napięcia doprowadzonego z sieci, we wszystkich trzech uzwoje-niach fazowych stojana jest jednakowe, natomiast przy nawrocie silnika napięcie wypadkowe doprowadzone do jednej fazy jest równe zeru, na-tomiast napięcia doprowadzone do pozostałych dwóch uzwojeń fazo-wych mają takie same wartości, ale są w przeciwfazie, w wyniku czego napięcia wypadkowe doprowadzone do uzwojeń fazowych silnika tworzą układ niesymetryczny. W związku z tym, faza włączenia napięcia sieci ma istotny wpływ na przebiegi nieustalone prądów i momentu elektroma-gnetycznego, których udary mogą znacznie przekraczać wartości szczy-towe tych wielkości występujące podczas rozruchu silnika. O ile przy wielokrotnym powtórnym załączaniu, przy tych samych czasach przerwy beznapięciowej, wartości szczytowe prądów i momentu elektromagne-tycznego będą takie same, to przy nawrocie, dla tych samych czasów przerwy beznapięciowej, ze względu na niesymetrię napięć, udary prądu i momentu mogą być różne.
Udary momentu przy nawrocie z polem niestłumionym mogą być 3 ÷ 4.5 razy większe, a udary prądu 1.5 ÷ 2 razy większe, niż przy rozruchu silnika, co spowodowane jest oddziaływaniem pola wytworzonego przez niestłumione prądy wirnika. Pole to wpływa również na stabilność proce-su nawrotu w zależności od fazy włączenia napięcia sieci.
Przy nawrocie czas rozruchu silnika w kierunku przeciwnym, przy wszystkich początkowych fazach włączenia, jest mniej więcej jednakowy i zbliżony do wartości obliczonej za pomocą statycznej charakterystyki mechanicznej.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
156
5.4.2. Przełączanie liczby par biegunów silnika
W silnikach indukcyjnych wielobiegowych mogą być stosowane albo dwa niezależne uzwojenia stojana, lub też jedno uzwojenie przełączalne. W tym drugim przypadku najczęściej stosuje się układ Dahlandera, w którym uzwojenia połączone są w trójkąt lub w podwójną gwiazdę, przy czym liczba par biegunów przy połączeniu uzwojeń w trójkąt jest dwa razy większa niż przy połączeniu uzwojeń w podwójną gwiazdę [185].
Niezależne uzwojenia stojana silników dwubiegowych wykonuje się w ten sposób, że przy włączeniu do sieci jednego uzwojenia, w uzwojeniu drugim nie indukuje się siła elektromotoryczna o częstotliwości podsta-wowej. Dlatego też, przełączanie tych uzwojeń zarówno z prędkości ma-łej do dużej jak i odwrotnie odbywa się przy stłumionym polu magnetycz-nym, w związku z tym, podczas przełączania występują momenty dyna-miczne o wartościach zbliżonych do udarów momentu występujących podczas rozruchu silnika.
W przypadku stosowania układu Dahlandera, wszystkie półuzwojenia uzwojeń fazowych stojana, przy pracy silnika zarówno z większą jak i z mniejszą prędkością, są przyłączone do sieci. Przy przełączeniu silnika następuje krótkotrwałe odłączenie uzwojeń stojana przy jednym układzie połączeń, następnie, po zmianie układu połączeń połówek uzwojenia następuje ponowne włączenie napięcia zasilającego. Czas przerwy bez-napięciowej jest w tym przypadku bardzo krótki, warunkowany czasem pracy aparatury łączeniowej.
W stanie ustalonym przed przełączeniem, zarówno dla połączenia uzwojeń stojana w trójkąt jak i w podwójna gwiazdę, prądy płynące w obu połówkach uzwojeń mają jednakowe wartości i kierunki. Przy przełącze-niu połówek uzwojeń stojana z trójkąta przy którym liczba par biegunów jest równa 2p (a więc prędkości mniejszej), w podwójną gwiazdę, przy której liczba par biegunów jest równa p (a więc na prędkość dwa razy większą), poszczególne połówki uzwojeń stojana zostają połączone rów-nolegle, tworząc dla indukowanych w nich sił elektromotorycznych obwód zamknięty.
W związku z tym, przy przełączaniu uzwojeń stojana z prędkości mniejszej na większą w silniku istnieje niestłumione pole, które oddziały-wuje na przebiegi nieustalone prądu i momentu elektromagnetycznego. Pole to indukuje w uzwojeniach stojana prądy, które wytwarzają dodat-kowy moment elektromagnetyczny, nakładający się na moment elektro-magnetyczny napędowy wytworzony przez prądy płynące w wyniku przy-łączenia silnika do sieci. W przypadku dłuższej przerwy beznapięciowej, pole wytworzone przez prądy wirnika zostaje praktycznie stłumione, w wyniku czego przebiegi prądów i momentu elektromagnetycznego mają

5. Modelowanie wybranych stanów pracy silników indukcyjnych
157
charakter zbliżony do przebiegów występujących podczas rozruchu silni-ka.
Przy przełączeniu uzwojeń stojana z podwójnej gwiazdy (a więc z większej prędkości wirnika) na trójkąt (czyli prędkość mniejszą), obie połówki każdego z uzwojeń fazowych zostają połączone szeregowo, ale przeciwsobnie, w wyniku czego siły elektromotoryczne pochodzące od pola niestłumionego będą miały kierunki przeciwne, a ich suma będzie równa zeru. W związku z tym, pole niestłumione nie będzie w tym przy-padku wpływało na procesy przejściowe. Po załączeniu połączonego w trójkąt silnika do sieci, jego prędkość będzie znacznie większa od nowej prędkości synchronicznej, w wyniku czego otrzymujemy pracę prądnico-wą. Ze względu na brak momentu napędowego, następuje gwałtowny spadek prędkości obrotowej do nowej prędkości znamionowej, wokół której występują oscylacje prędkości i momentu elektromagnetycznego.
Przy obliczaniu przebiegów nieustalonych podczas przełączania licz-by par biegunów z wykorzystaniem modelu obwodowego można wyod-rębnić następujące stany pracy silnika: pracę ustaloną oraz wybieg czę-ściowy silnika w czasie przerwy beznapięciowej dla określonej konfigura-cji uzwojeń (dla danych znamionowych odpowiadających liczbie par bie-gunów przed przełączeniem), a następnie ponowne załączenie przy zmienionej konfiguracji uzwojeń (dla danych znamionowych odpowiada-jących liczbie par biegunów po przełączeniu).
Przebiegi nieustalone przy przełączaniu liczby par biegunów silnika wyznacza się z układu równań (2.52), przy niezerowych warunkach po-czątkowych, wyznaczonych w wyniku obliczeń wybiegu silnika dla da-nych znamionowych odpowiadających liczbie par biegunów przed prze-łączeniem, w postaci:
0, 0, Re(Ir1),...,Re(IrN), 0, Im(Ir1),...,Im(IrN), ω*, ϕ,
Re(Ψs), Re(Ψr1),…, Re(ΨrN), Im(Ψs), Im(Ψr1),...,Im(ΨrN)
przy czym wartości prędkości kątowej wirnika ω należy zastąpić przez wartość początkową prędkości kątowej wirnika po przełączeniu ω*, gdzie: • ω* = 0.5 ω - przy przełączeniu z prędkości mniejszej na większą (2p
→ p), • ω* = 2 ω - przy przełączeniu z prędkości większej na mniejszą (p →
2p). Należy również określić fazę napięcia zasilającego, oraz dla przypadku występowania niestłumionego pola, wzajemną korelację fazy napięcia zasilającego i indukowanej siły elektromotorycznej.
Przykładowe przebiegi prądu w uzwojeniu fazowym stojana, momentu elektromagnetycznego oraz prędkości wirnika podczas przełączania licz-
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
158
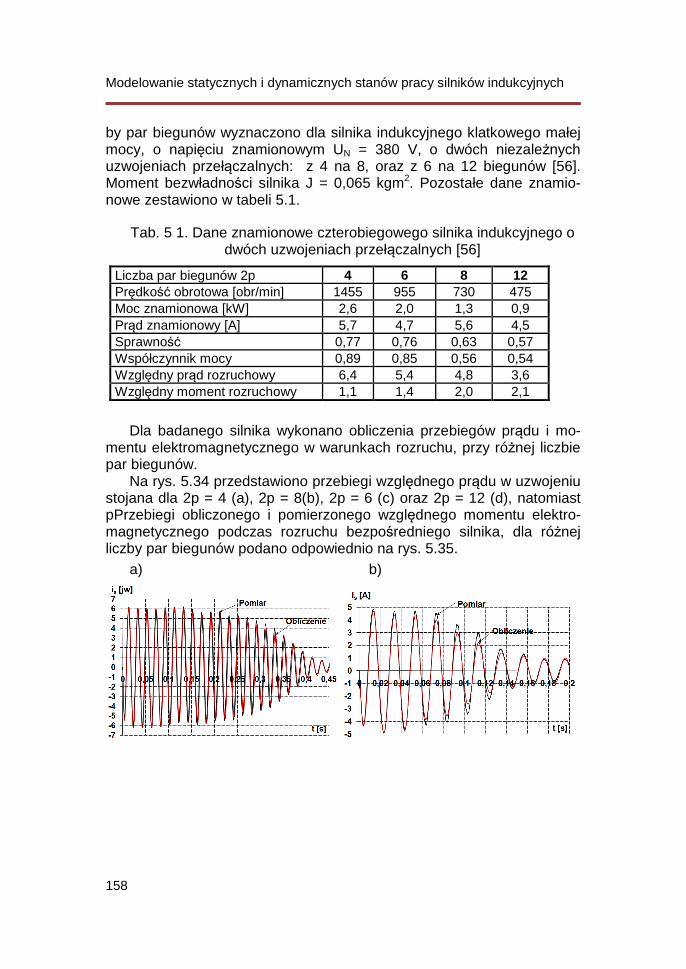
by par biegunów wyznaczono dla silnika indukcyjnego klatkowego małej mocy, o napięciu znamionowym UN = 380 V, o dwóch niezależnych uzwojeniach przełączalnych: z 4 na 8, oraz z 6 na 12 biegunów [56]. Moment bezwładności silnika J = 0,065 kgm2. Pozostałe dane znamio-nowe zestawiono w tabeli 5.1.
Tab. 5 1. Dane znamionowe czterobiegowego silnika indukcyjnego o dwóch uzwojeniach przełączalnych [56]
Liczba par biegunów 2p 4 6 8 12 Prędkość obrotowa [obr/min] 1455 955 730 475 Moc znamionowa [kW] 2,6 2,0 1,3 0,9 Prąd znamionowy [A] 5,7 4,7 5,6 4,5 Sprawność 0,77 0,76 0,63 0,57 Współczynnik mocy 0,89 0,85 0,56 0,54 Względny prąd rozruchowy 6,4 5,4 4,8 3,6 Względny moment rozruchowy 1,1 1,4 2,0 2,1
Dla badanego silnika wykonano obliczenia przebiegów prądu i mo-
mentu elektromagnetycznego w warunkach rozruchu, przy różnej liczbie par biegunów.
Na rys. 5.34 przedstawiono przebiegi względnego prądu w uzwojeniu stojana dla 2p = 4 (a), 2p = 8(b), 2p = 6 (c) oraz 2p = 12 (d), natomiast pPrzebiegi obliczonego i pomierzonego względnego momentu elektro-magnetycznego podczas rozruchu bezpośredniego silnika, dla różnej liczby par biegunów podano odpowiednio na rys. 5.35.
a) b)
5. Modelowanie wybranych stanów pracy silników indukcyjnych
159
c) d)
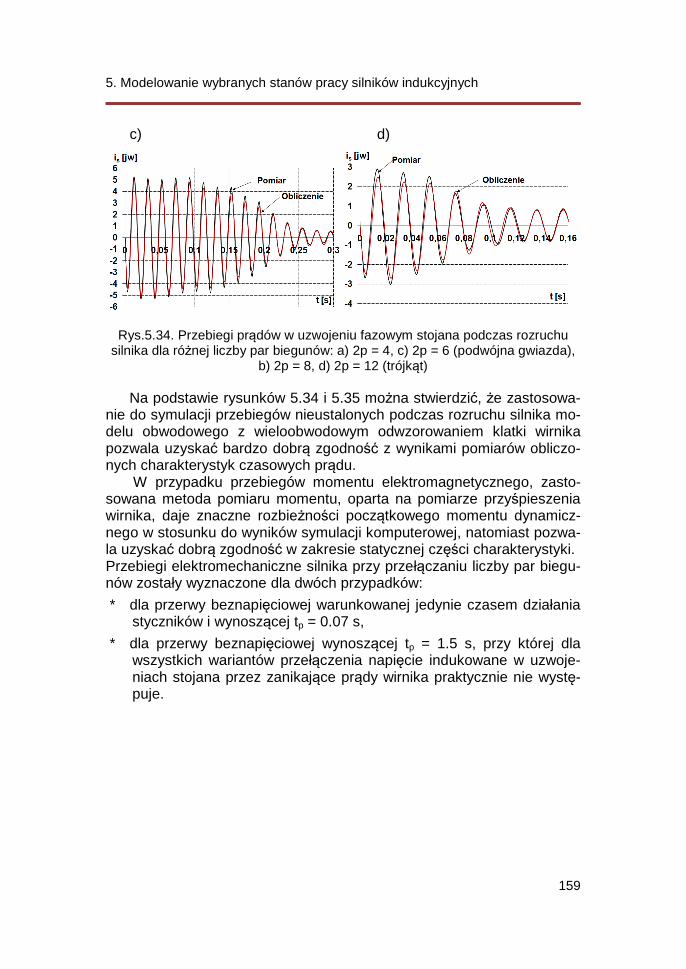
Rys.5.34. Przebiegi prądów w uzwojeniu fazowym stojana podczas rozruchu silnika dla różnej liczby par biegunów: a) 2p = 4, c) 2p = 6 (podwójna gwiazda),
b) 2p = 8, d) 2p = 12 (trójkąt)
Na podstawie rysunków 5.34 i 5.35 można stwierdzić, że zastosowa-nie do symulacji przebiegów nieustalonych podczas rozruchu silnika mo-delu obwodowego z wieloobwodowym odwzorowaniem klatki wirnika pozwala uzyskać bardzo dobrą zgodność z wynikami pomiarów obliczo-nych charakterystyk czasowych prądu.
W przypadku przebiegów momentu elektromagnetycznego, zasto-sowana metoda pomiaru momentu, oparta na pomiarze przyśpieszenia wirnika, daje znaczne rozbieżności początkowego momentu dynamicz-nego w stosunku do wyników symulacji komputerowej, natomiast pozwa-la uzyskać dobrą zgodność w zakresie statycznej części charakterystyki. Przebiegi elektromechaniczne silnika przy przełączaniu liczby par biegu-nów zostały wyznaczone dla dwóch przypadków:
∗ dla przerwy beznapięciowej warunkowanej jedynie czasem działania styczników i wynoszącej tp = 0.07 s,
∗ dla przerwy beznapięciowej wynoszącej tp = 1.5 s, przy której dla wszystkich wariantów przełączenia napięcie indukowane w uzwoje-niach stojana przez zanikające prądy wirnika praktycznie nie wystę-puje.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
160
a) b)
c) d)
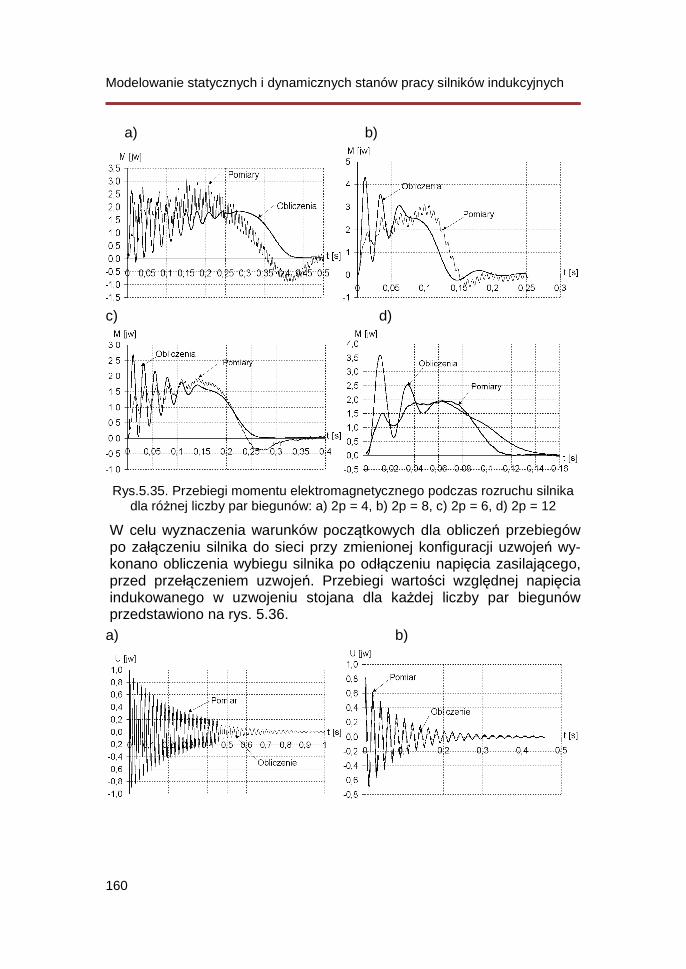
Rys.5.35. Przebiegi momentu elektromagnetycznego podczas rozruchu silnika
dla różnej liczby par biegunów: a) 2p = 4, b) 2p = 8, c) 2p = 6, d) 2p = 12
W celu wyznaczenia warunków początkowych dla obliczeń przebiegów po załączeniu silnika do sieci przy zmienionej konfiguracji uzwojeń wy-konano obliczenia wybiegu silnika po odłączeniu napięcia zasilającego, przed przełączeniem uzwojeń. Przebiegi wartości względnej napięcia indukowanego w uzwojeniu stojana dla każdej liczby par biegunów przedstawiono na rys. 5.36. a) b)
5. Modelowanie wybranych stanów pracy silników indukcyjnych
161
c) d)
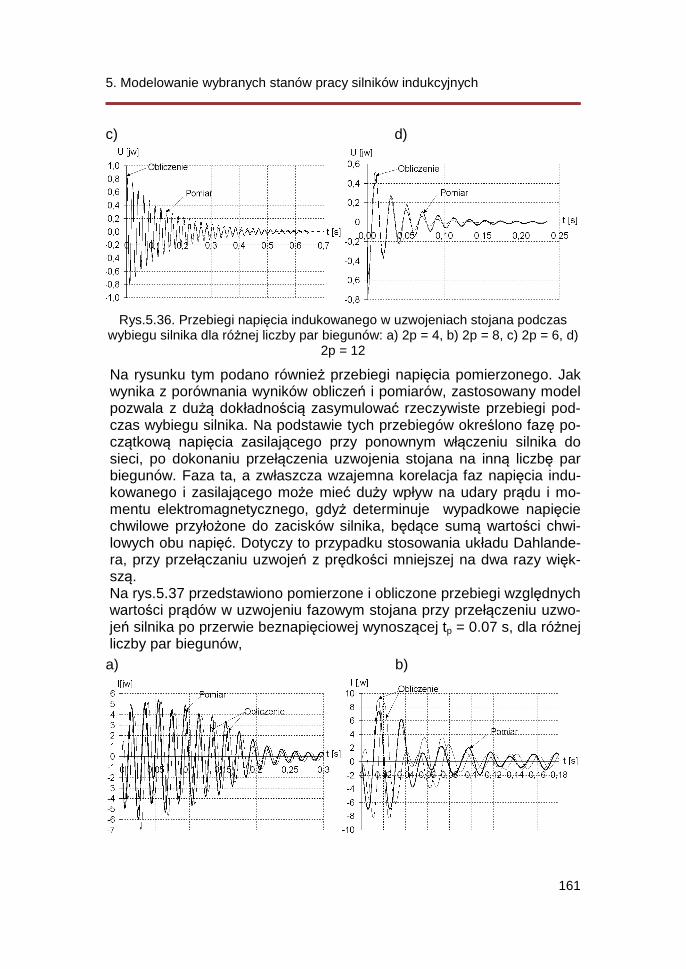
Rys.5.36. Przebiegi napięcia indukowanego w uzwojeniach stojana podczas
wybiegu silnika dla różnej liczby par biegunów: a) 2p = 4, b) 2p = 8, c) 2p = 6, d) 2p = 12
Na rysunku tym podano również przebiegi napięcia pomierzonego. Jak wynika z porównania wyników obliczeń i pomiarów, zastosowany model pozwala z dużą dokładnością zasymulować rzeczywiste przebiegi pod-czas wybiegu silnika. Na podstawie tych przebiegów określono fazę po-czątkową napięcia zasilającego przy ponownym włączeniu silnika do sieci, po dokonaniu przełączenia uzwojenia stojana na inną liczbę par biegunów. Faza ta, a zwłaszcza wzajemna korelacja faz napięcia indu-kowanego i zasilającego może mieć duży wpływ na udary prądu i mo-mentu elektromagnetycznego, gdyż determinuje wypadkowe napięcie chwilowe przyłożone do zacisków silnika, będące sumą wartości chwi-lowych obu napięć. Dotyczy to przypadku stosowania układu Dahlande-ra, przy przełączaniu uzwojeń z prędkości mniejszej na dwa razy więk-szą. Na rys.5.37 przedstawiono pomierzone i obliczone przebiegi względnych wartości prądów w uzwojeniu fazowym stojana przy przełączeniu uzwo-jeń silnika po przerwie beznapięciowej wynoszącej tp = 0.07 s, dla różnej liczby par biegunów, a) b)
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
162
c) d)
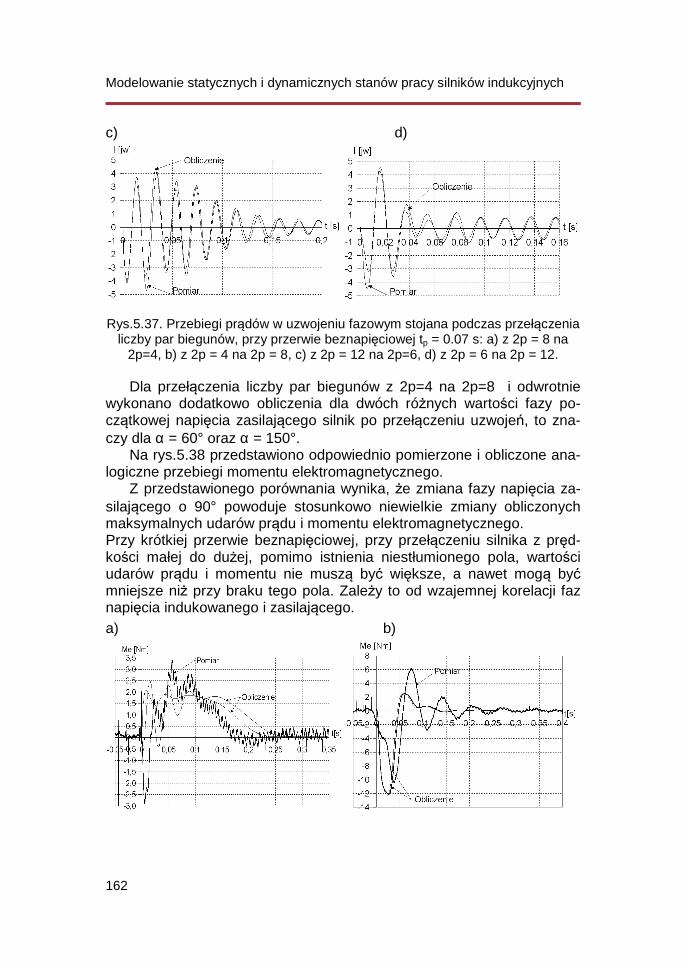
Rys.5.37. Przebiegi prądów w uzwojeniu fazowym stojana podczas przełączenia liczby par biegunów, przy przerwie beznapięciowej tp = 0.07 s: a) z 2p = 8 na
2p=4, b) z 2p = 4 na 2p = 8, c) z 2p = 12 na 2p=6, d) z 2p = 6 na 2p = 12.
Dla przełączenia liczby par biegunów z 2p=4 na 2p=8 i odwrotnie wykonano dodatkowo obliczenia dla dwóch różnych wartości fazy po-czątkowej napięcia zasilającego silnik po przełączeniu uzwojeń, to zna-czy dla α = 60° oraz α = 150°.
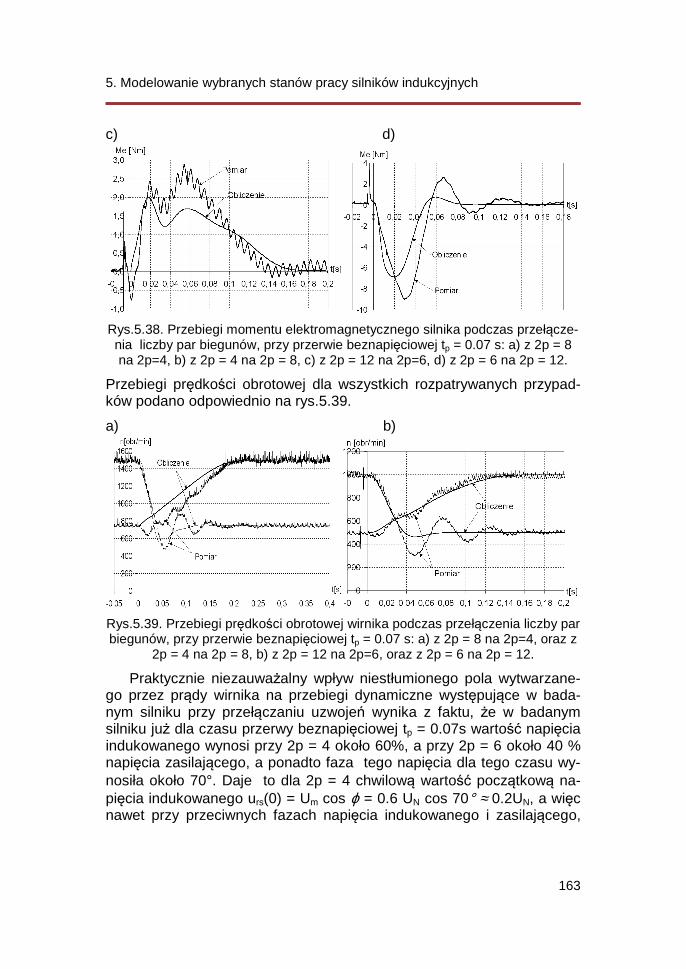
Na rys.5.38 przedstawiono odpowiednio pomierzone i obliczone ana-logiczne przebiegi momentu elektromagnetycznego.
Z przedstawionego porównania wynika, że zmiana fazy napięcia za-silającego o 90° powoduje stosunkowo niewielkie zmiany obliczonych maksymalnych udarów prądu i momentu elektromagnetycznego. Przy krótkiej przerwie beznapięciowej, przy przełączeniu silnika z pręd-kości małej do dużej, pomimo istnienia niestłumionego pola, wartości udarów prądu i momentu nie muszą być większe, a nawet mogą być mniejsze niż przy braku tego pola. Zależy to od wzajemnej korelacji faz napięcia indukowanego i zasilającego. a) b)
5. Modelowanie wybranych stanów pracy silników indukcyjnych
163
c) d)
Rys.5.38. Przebiegi momentu elektromagnetycznego silnika podczas przełącze-nia liczby par biegunów, przy przerwie beznapięciowej tp = 0.07 s: a) z 2p = 8 na 2p=4, b) z 2p = 4 na 2p = 8, c) z 2p = 12 na 2p=6, d) z 2p = 6 na 2p = 12.
Przebiegi prędkości obrotowej dla wszystkich rozpatrywanych przypad-ków podano odpowiednio na rys.5.39.
a) b)
Rys.5.39. Przebiegi prędkości obrotowej wirnika podczas przełączenia liczby par biegunów, przy przerwie beznapięciowej tp = 0.07 s: a) z 2p = 8 na 2p=4, oraz z
2p = 4 na 2p = 8, b) z 2p = 12 na 2p=6, oraz z 2p = 6 na 2p = 12.
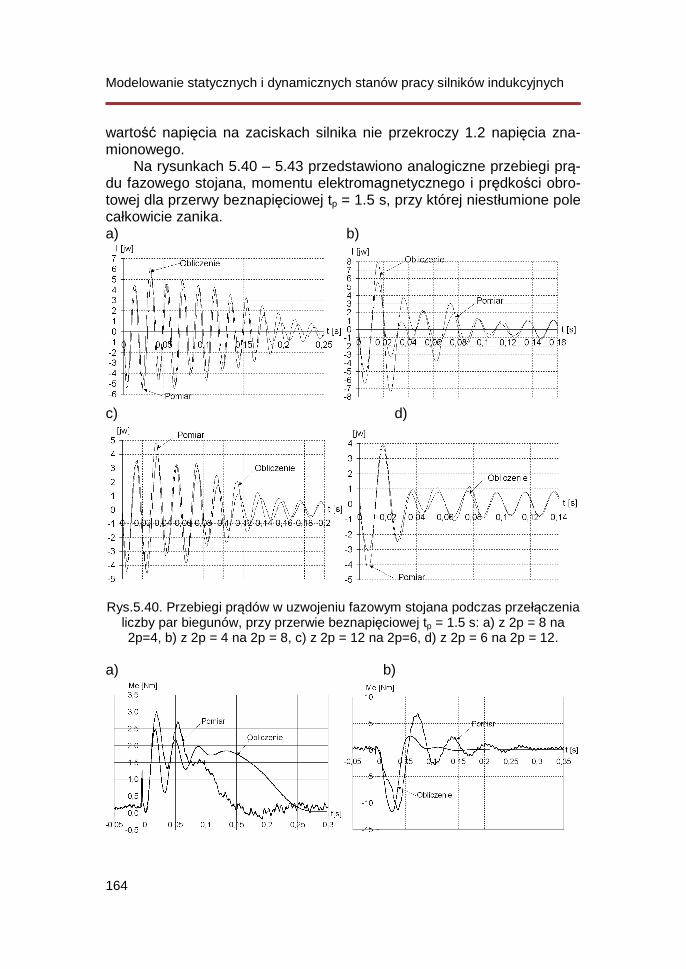
Praktycznie niezauważalny wpływ niestłumionego pola wytwarzane-go przez prądy wirnika na przebiegi dynamiczne występujące w bada-nym silniku przy przełączaniu uzwojeń wynika z faktu, że w badanym silniku już dla czasu przerwy beznapięciowej tp = 0.07s wartość napięcia indukowanego wynosi przy 2p = 4 około 60%, a przy 2p = 6 około 40 % napięcia zasilającego, a ponadto faza tego napięcia dla tego czasu wy-nosiła około 70°. Daje to dla 2p = 4 chwilową wartość początkową na-pięcia indukowanego urs(0) = Um cos ϕ = 0.6 UN cos 70° ≈ 0.2UN, a więc nawet przy przeciwnych fazach napięcia indukowanego i zasilającego,
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
164
wartość napięcia na zaciskach silnika nie przekroczy 1.2 napięcia zna-mionowego.
Na rysunkach 5.40 – 5.43 przedstawiono analogiczne przebiegi prą-du fazowego stojana, momentu elektromagnetycznego i prędkości obro-towej dla przerwy beznapięciowej tp = 1.5 s, przy której niestłumione pole całkowicie zanika. a) b)
c) d)
Rys.5.40. Przebiegi prądów w uzwojeniu fazowym stojana podczas przełączenia liczby par biegunów, przy przerwie beznapięciowej tp = 1.5 s: a) z 2p = 8 na 2p=4, b) z 2p = 4 na 2p = 8, c) z 2p = 12 na 2p=6, d) z 2p = 6 na 2p = 12.
a) b)
5. Modelowanie wybranych stanów pracy silników indukcyjnych
165
c) d)
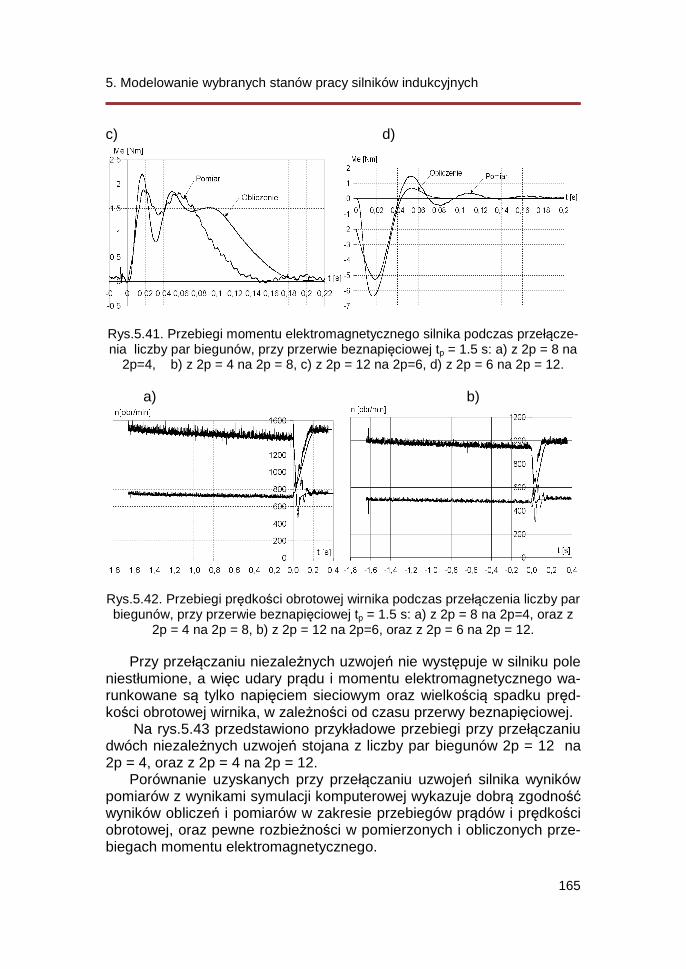
Rys.5.41. Przebiegi momentu elektromagnetycznego silnika podczas przełącze-nia liczby par biegunów, przy przerwie beznapięciowej tp = 1.5 s: a) z 2p = 8 na
2p=4, b) z 2p = 4 na 2p = 8, c) z 2p = 12 na 2p=6, d) z 2p = 6 na 2p = 12.
a) b)
Rys.5.42. Przebiegi prędkości obrotowej wirnika podczas przełączenia liczby par biegunów, przy przerwie beznapięciowej tp = 1.5 s: a) z 2p = 8 na 2p=4, oraz z
2p = 4 na 2p = 8, b) z 2p = 12 na 2p=6, oraz z 2p = 6 na 2p = 12.
Przy przełączaniu niezależnych uzwojeń nie występuje w silniku pole niestłumione, a więc udary prądu i momentu elektromagnetycznego wa-runkowane są tylko napięciem sieciowym oraz wielkością spadku pręd-kości obrotowej wirnika, w zależności od czasu przerwy beznapięciowej.
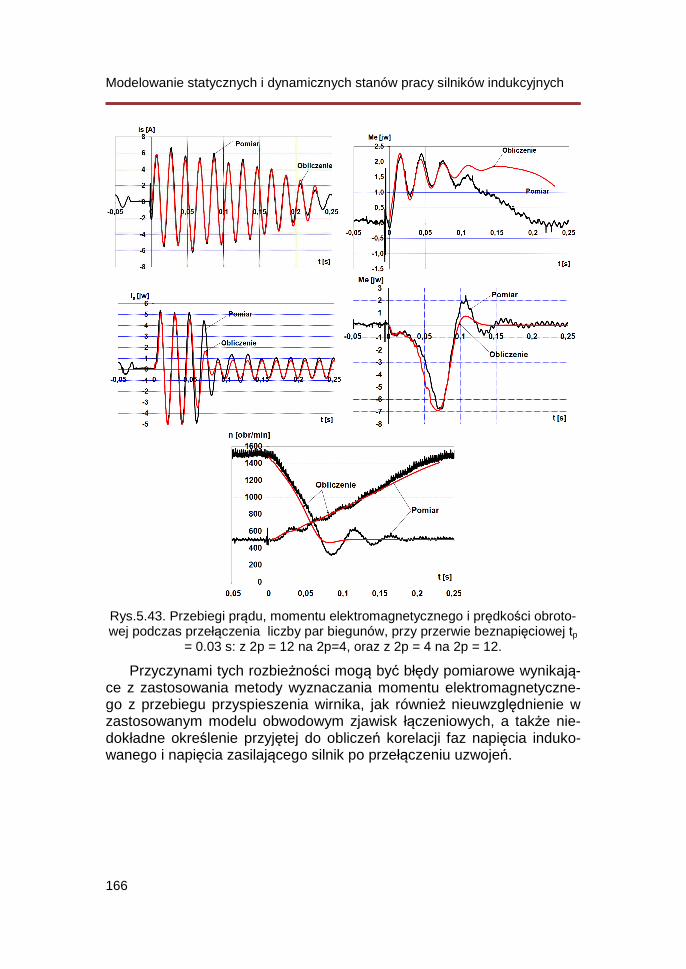
Na rys.5.43 przedstawiono przykładowe przebiegi przy przełączaniu dwóch niezależnych uzwojeń stojana z liczby par biegunów 2p = 12 na 2p = 4, oraz z 2p = 4 na 2p = 12.
Porównanie uzyskanych przy przełączaniu uzwojeń silnika wyników pomiarów z wynikami symulacji komputerowej wykazuje dobrą zgodność wyników obliczeń i pomiarów w zakresie przebiegów prądów i prędkości obrotowej, oraz pewne rozbieżności w pomierzonych i obliczonych prze-biegach momentu elektromagnetycznego.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
166
Rys.5.43. Przebiegi prądu, momentu elektromagnetycznego i prędkości obroto-wej podczas przełączenia liczby par biegunów, przy przerwie beznapięciowej tp
= 0.03 s: z 2p = 12 na 2p=4, oraz z 2p = 4 na 2p = 12.
Przyczynami tych rozbieżności mogą być błędy pomiarowe wynikają-ce z zastosowania metody wyznaczania momentu elektromagnetyczne-go z przebiegu przyspieszenia wirnika, jak również nieuwzględnienie w zastosowanym modelu obwodowym zjawisk łączeniowych, a także nie-dokładne określenie przyjętej do obliczeń korelacji faz napięcia induko-wanego i napięcia zasilającego silnik po przełączeniu uzwojeń.
5. Modelowanie wybranych stanów pracy silników indukcyjnych
167
5.4.3. Rozruch silnika indukcyjnego za pomoc ą przeł ącznika gwiazda - trójk ąt
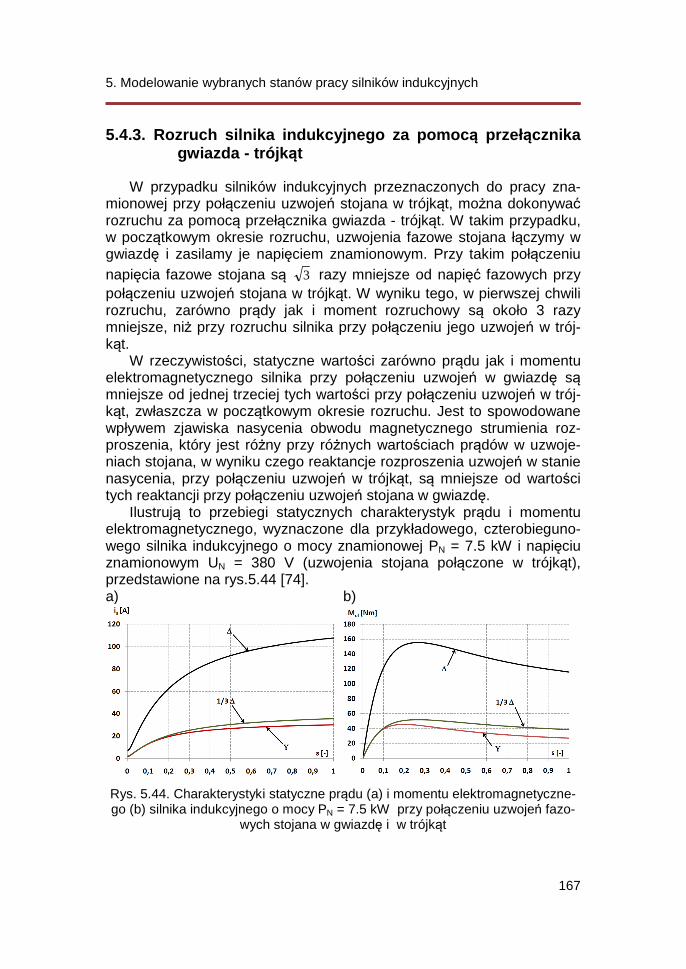
W przypadku silników indukcyjnych przeznaczonych do pracy zna-mionowej przy połączeniu uzwojeń stojana w trójkąt, można dokonywać rozruchu za pomocą przełącznika gwiazda - trójkąt. W takim przypadku, w początkowym okresie rozruchu, uzwojenia fazowe stojana łączymy w gwiazdę i zasilamy je napięciem znamionowym. Przy takim połączeniu napięcia fazowe stojana są 3 razy mniejsze od napięć fazowych przy połączeniu uzwojeń stojana w trójkąt. W wyniku tego, w pierwszej chwili rozruchu, zarówno prądy jak i moment rozruchowy są około 3 razy mniejsze, niż przy rozruchu silnika przy połączeniu jego uzwojeń w trój-kąt.
W rzeczywistości, statyczne wartości zarówno prądu jak i momentu elektromagnetycznego silnika przy połączeniu uzwojeń w gwiazdę są mniejsze od jednej trzeciej tych wartości przy połączeniu uzwojeń w trój-kąt, zwłaszcza w początkowym okresie rozruchu. Jest to spowodowane wpływem zjawiska nasycenia obwodu magnetycznego strumienia roz-proszenia, który jest różny przy różnych wartościach prądów w uzwoje-niach stojana, w wyniku czego reaktancje rozproszenia uzwojeń w stanie nasycenia, przy połączeniu uzwojeń w trójkąt, są mniejsze od wartości tych reaktancji przy połączeniu uzwojeń stojana w gwiazdę.
Ilustrują to przebiegi statycznych charakterystyk prądu i momentu elektromagnetycznego, wyznaczone dla przykładowego, czterobieguno-wego silnika indukcyjnego o mocy znamionowej PN = 7.5 kW i napięciu znamionowym UN = 380 V (uzwojenia stojana połączone w trójkąt), przedstawione na rys.5.44 [74]. a) b)
Rys. 5.44. Charakterystyki statyczne prądu (a) i momentu elektromagnetyczne-go (b) silnika indukcyjnego o mocy PN = 7.5 kW przy połączeniu uzwojeń fazo-
wych stojana w gwiazdę i w trójkąt
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
168
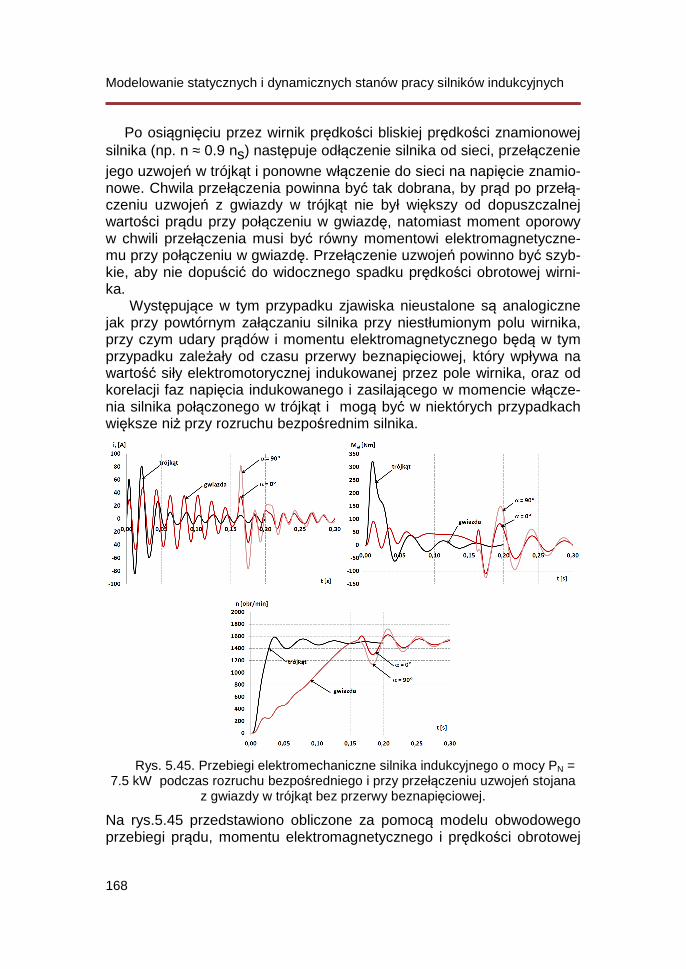
Po osiągnięciu przez wirnik prędkości bliskiej prędkości znamionowej silnika (np. n ≈ 0.9 ns) następuje odłączenie silnika od sieci, przełączenie jego uzwojeń w trójkąt i ponowne włączenie do sieci na napięcie znamio-nowe. Chwila przełączenia powinna być tak dobrana, by prąd po przełą-czeniu uzwojeń z gwiazdy w trójkąt nie był większy od dopuszczalnej wartości prądu przy połączeniu w gwiazdę, natomiast moment oporowy w chwili przełączenia musi być równy momentowi elektromagnetyczne-mu przy połączeniu w gwiazdę. Przełączenie uzwojeń powinno być szyb-kie, aby nie dopuścić do widocznego spadku prędkości obrotowej wirni-ka.
Występujące w tym przypadku zjawiska nieustalone są analogiczne jak przy powtórnym załączaniu silnika przy niestłumionym polu wirnika, przy czym udary prądów i momentu elektromagnetycznego będą w tym przypadku zależały od czasu przerwy beznapięciowej, który wpływa na wartość siły elektromotorycznej indukowanej przez pole wirnika, oraz od korelacji faz napięcia indukowanego i zasilającego w momencie włącze-nia silnika połączonego w trójkąt i mogą być w niektórych przypadkach większe niż przy rozruchu bezpośrednim silnika.
Rys. 5.45. Przebiegi elektromechaniczne silnika indukcyjnego o mocy PN = 7.5 kW podczas rozruchu bezpośredniego i przy przełączeniu uzwojeń stojana
z gwiazdy w trójkąt bez przerwy beznapięciowej.
Na rys.5.45 przedstawiono obliczone za pomocą modelu obwodowego przebiegi prądu, momentu elektromagnetycznego i prędkości obrotowej
5. Modelowanie wybranych stanów pracy silników indukcyjnych
169
wirnika w silniku indukcyjnym o mocy PN = 7.5 kW podczas rozruchu bezpośredniego przy połączeniu uzwojeń w trójkąt i w gwiazdę oraz przy przełączeniu uzwojeń stojana z gwiazdy w trójkąt w chwili t = 0.16s. bez przerwy beznapięciowej, dla różnych faz początkowych napięcia zasila-jącego w chwili przełączenia.
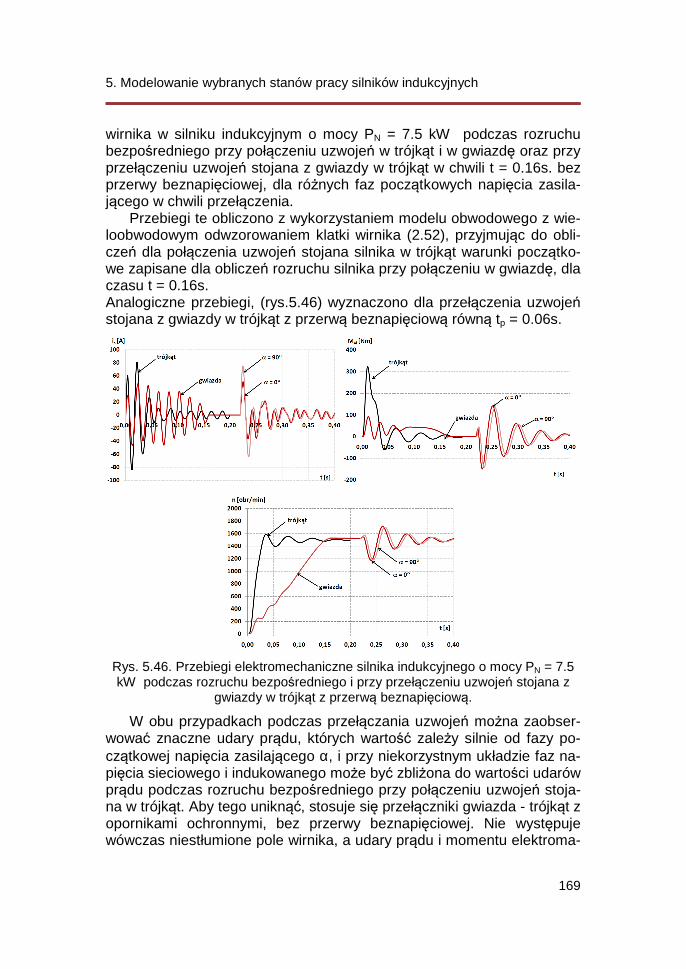
Przebiegi te obliczono z wykorzystaniem modelu obwodowego z wie-loobwodowym odwzorowaniem klatki wirnika (2.52), przyjmując do obli-czeń dla połączenia uzwojeń stojana silnika w trójkąt warunki początko-we zapisane dla obliczeń rozruchu silnika przy połączeniu w gwiazdę, dla czasu t = 0.16s. Analogiczne przebiegi, (rys.5.46) wyznaczono dla przełączenia uzwojeń stojana z gwiazdy w trójkąt z przerwą beznapięciową równą tp = 0.06s.
Rys. 5.46. Przebiegi elektromechaniczne silnika indukcyjnego o mocy PN = 7.5 kW podczas rozruchu bezpośredniego i przy przełączeniu uzwojeń stojana z
gwiazdy w trójkąt z przerwą beznapięciową.
W obu przypadkach podczas przełączania uzwojeń można zaobser-wować znaczne udary prądu, których wartość zależy silnie od fazy po-czątkowej napięcia zasilającego α, i przy niekorzystnym układzie faz na-pięcia sieciowego i indukowanego może być zbliżona do wartości udarów prądu podczas rozruchu bezpośredniego przy połączeniu uzwojeń stoja-na w trójkąt. Aby tego uniknąć, stosuje się przełączniki gwiazda - trójkąt z opornikami ochronnymi, bez przerwy beznapięciowej. Nie występuje wówczas niestłumione pole wirnika, a udary prądu i momentu elektroma-
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
170
gnetycznego w momencie włączenia silnika przy połączeniu w trójkąt będą warunkowane różnicą napięć gwiazdy i trójkąta i na ogół będą znacznie mniejsze niż przy rozruchu bezpośrednim silnika.
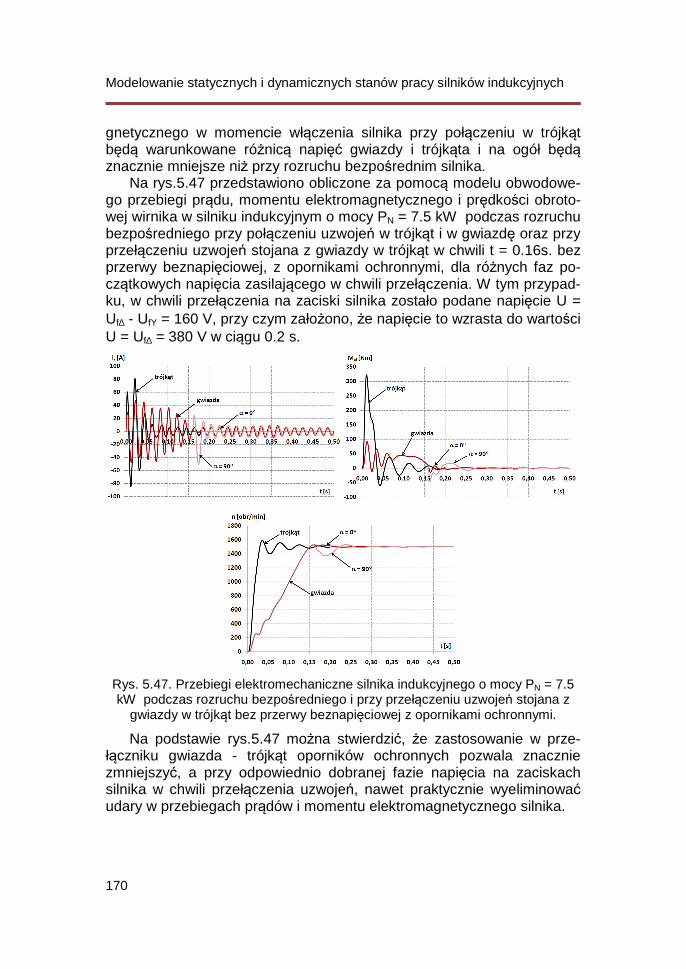
Na rys.5.47 przedstawiono obliczone za pomocą modelu obwodowe-go przebiegi prądu, momentu elektromagnetycznego i prędkości obroto-wej wirnika w silniku indukcyjnym o mocy PN = 7.5 kW podczas rozruchu bezpośredniego przy połączeniu uzwojeń w trójkąt i w gwiazdę oraz przy przełączeniu uzwojeń stojana z gwiazdy w trójkąt w chwili t = 0.16s. bez przerwy beznapięciowej, z opornikami ochronnymi, dla różnych faz po-czątkowych napięcia zasilającego w chwili przełączenia. W tym przypad-ku, w chwili przełączenia na zaciski silnika zostało podane napięcie U = Uf∆ - UfΥ = 160 V, przy czym założono, że napięcie to wzrasta do wartości U = Uf∆ = 380 V w ciągu 0.2 s.
Rys. 5.47. Przebiegi elektromechaniczne silnika indukcyjnego o mocy PN = 7.5 kW podczas rozruchu bezpośredniego i przy przełączeniu uzwojeń stojana z
gwiazdy w trójkąt bez przerwy beznapięciowej z opornikami ochronnymi.
Na podstawie rys.5.47 można stwierdzić, że zastosowanie w prze-łączniku gwiazda - trójkąt oporników ochronnych pozwala znacznie zmniejszyć, a przy odpowiednio dobranej fazie napięcia na zaciskach silnika w chwili przełączenia uzwojeń, nawet praktycznie wyeliminować udary w przebiegach prądów i momentu elektromagnetycznego silnika.
5. Modelowanie wybranych stanów pracy silników indukcyjnych
171
5.4. Hamowanie silników indukcyjnych
W celu zatrzymania silnika indukcyjnego stosuje się różne rodzaje hamowania, różniące się czasem i sposobem zatrzymania wirnika oraz różnymi wartościami udarów prądów i momentu elektromagnetycznego.
Najprostszym sposobem hamowania silnika jest hamowanie wybie-giem, stosowane w układach napędowych, gdy na silnik indukcyjny nie działa żaden moment od strony urządzenia napędzanego, a czas hamo-wania zależy tylko od momentu bezwładności układu oraz od momentu strat własnych silnika.
Innym sposobem hamowania jest hamowanie za pomocą zwarcia, uwarunkowane możliwością wyzyskania energii zmagazynowanej w polu magnetycznym silnika. Zjawisko hamowania wystąpi wówczas, gdy po odłączeniu silnika od sieci, uzwojenie stojana zostanie zwarte bezpo-średnio lub przez jakiś opór, zanim nie zaniknie strumień magnetyczny, wytwarzany przez prądy wirnika. Po zamknięciu uzwojenia stojana, stru-mień ten powoduje przepływ prądów w obwodach stojana, które, zgodnie z zasadą zachowania strumienia, przeciwdziałają zachodzącym zmia-nom i współdziałając z polem wytwarzanym przez prądy wirnika powodu-ją powstanie momentu hamującego. Towarzyszące temu przebiegi nie-ustalone prądu, momentu elektromagnetycznego i prędkości obrotowej wirnika zostały omówione w rozdziale 5.3. Hamowanie za pomocą zwar-cia stosowane jest głównie dla silników małej mocy, w układach napędo-wych o niewielkim momencie bezwładności.
Przy napędzaniu wirnika silnika indukcyjnego zgodnie z kierunkiem wirowania pola magnetycznego, osiąga on prędkość większą od syn-chronicznej, pobierając moc bierną. Moment elektromagnetyczny silnika napędzanego działa w kierunku przeciwnym do kierunku prędkości wirni-ka i staje się momentem hamującym. Taki stan pracy maszyny można osiągnąć po odłączeniu wirującego silnika od sieci poprzez dołączenie do uzwojenia stojana pojemności. Powoduje to powstanie pola magne-tycznego, wytworzonego wzbudzonymi w uzwojeniach stojana prądami przejściowymi o małej częstotliwości, w wyniku czego następuje proces wzbudzenia i maszyna zaczyna pracować jako prądnica z ujemnym po-ślizgiem. Na wale silnika powstaje moment hamujący, którego wartość jest tym większa, im większa jest wartość początkowa ujemnego pośli-zgu. Wartość poślizgu zależy od prędkości wirnika i częstotliwości wła-snej prądów przejściowych, wzbudzonych w obwodzie rezonansowym, utworzonym przez indukcyjność uzwojeń silnika oraz pojemność przyłą-czonych kondensatorów. Im większa jest wartość pojemności, tym mniej-sza jest częstotliwość własna prądów przejściowych i tym większa war-tość początkowa ujemnego poślizgu i momentu hamowania. Moment
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
172
hamowania maleje w miarę zmniejszania się prędkości obrotowej silnika. Gdy prędkość silnika zmaleje do prędkości kątowej wzbudzonego pola, moment hamujący zanika i hamowanie ustaje [185].
Hamowanie prądnicowe może zachodzić np. przy opuszczaniu cięża-ru lub gdy napędzana maszyna elektryczna pracuje jako silnik i powoduje wzrost prędkości powyżej prędkości synchronicznej.
Najczęściej stosowanymi sposobami hamowania silnika indukcyjnego jest hamowanie przeciwprądem i hamowanie dynamiczne.
5.5.1. Hamowanie przeciwpr ądem
Jednym ze sposobów hamowania silnika indukcyjnego jest hamowa-nie przeciwprądem. Polega ono na zmianie kolejności faz napięcia zasi-lającego w chwili osiągnięcia przez wirnik prędkości synchronicznej. Po-woduje to zmianę kierunku pola wirującego na przeciwny w stosunku do prędkości obrotowej, a więc poślizg wirnika staje się większy od jedności i maszyna działa jako hamulec. W tym stanie pracy prąd ustalony silnika klatkowego jest większy od prądu zwarcia. Ponadto, podczas takiego sposobu hamowania prędkość obrotowa maleje do zera, jednak silnik nie zatrzymuje się, ale zaczyna się obracać w kierunku przeciwnym, aż do osiągnięcia ponownie prędkości zbliżonej do synchronicznej. Silnik nale-ży więc wyłączyć, gdy prędkość obrotowa wirnika osiągnie wartość rów-na zeru.
Przedstawionym zjawiskom towarzyszą nieustalone przebiegi elek-tromechaniczne prądu i momentu elektromagnetycznego, których udary mogą być większe, niż przy rozruchu silnika, i zależą od wartości napię-cia indukowanego w uzwojeniach stojana przez zanikające w czasie prą-dy wirnika, płynące po odłączeniu napięcia zasilającego silnik, oraz od korelacji fazy tego napięcia i napięcia zasilającego, załączonego na zaci-ski uzwojeń fazowych stojana po skrzyżowaniu faz [185].
W obwodowym modelu matematycznym silnika obecność pola wiru-jącego w kierunku przeciwnym w stosunku do prędkości obrotowej wirni-ka, związanego ze zmianą kolejności faz napięcia zasilającego uzwoje-nia stojana, można uwzględnić przez zmianę znaku prędkości kątowej synchronicznej, w wyniku czego otrzymuje się model matematyczny sil-nika w postaci:
∑=
−
−=
−+−−=
N
imsrim
s
MJp
LjJp
dtd
RMKjjMdtd
1
*2
1
})(Re{
}][]])[[]1[({][
II
IIUI
ω
ωω (5.5)
5. Modelowanie wybranych stanów pracy silników indukcyjnych
173
Przedstawiony obwodowy model matematyczny silnika indukcyjnego został wykorzystany do obliczenia przebiegów czasowych prądu fazowe-go stojana, momentu elektromagnetycznego i prędkości obrotowej w warunkach hamowania przeciwprądem dla przykładowego, sześciobie-gunowego silnika indukcyjnego o mocy 1.5 kW, napięciu 380V (uzwoje-nia połączone w gwiazdę) [62].
Pozostałe dane znamionowe są następujące: prąd znamionowy IN = 3.8 A, współczynnik mocy cos ϕ = 0.73, sprawność η = 76.7 %, prędkość znamionowa n = 930 obr/min. Silnik był sprzęgnięty z prądnicą prądu stałego. Moment bezwładności układu wynosił J = 0.04122 Nms2. Dla tego silnika wykonano również pomiary przebiegów nieustalonych pod-czas hamowania przeciwprądem, przy użyciu karty pomiarowej Ambex.
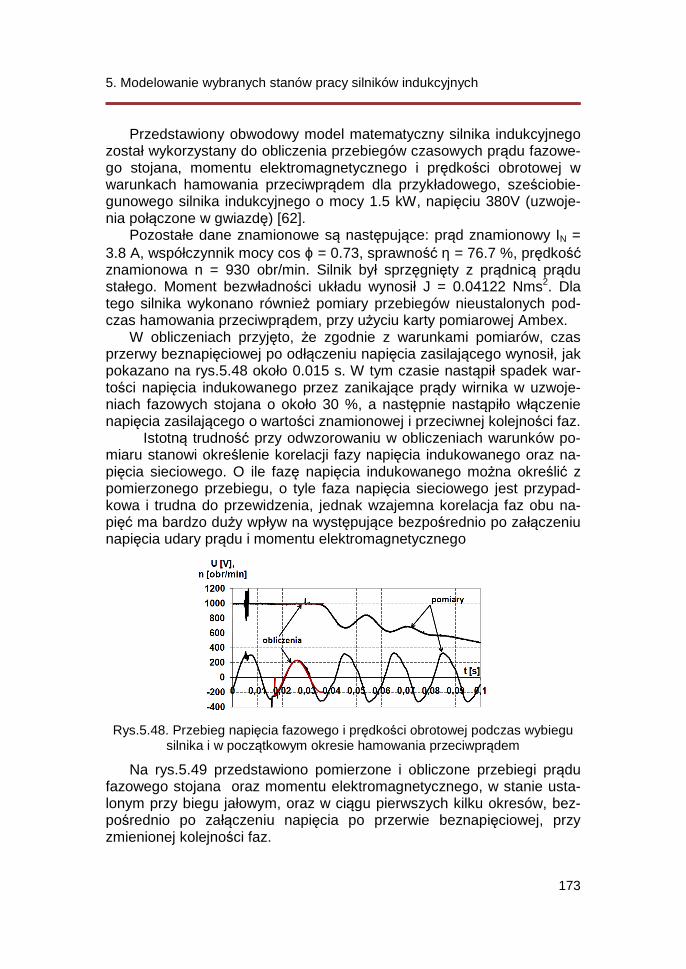
W obliczeniach przyjęto, że zgodnie z warunkami pomiarów, czas przerwy beznapięciowej po odłączeniu napięcia zasilającego wynosił, jak pokazano na rys.5.48 około 0.015 s. W tym czasie nastąpił spadek war-tości napięcia indukowanego przez zanikające prądy wirnika w uzwoje-niach fazowych stojana o około 30 %, a następnie nastąpiło włączenie napięcia zasilającego o wartości znamionowej i przeciwnej kolejności faz.
Istotną trudność przy odwzorowaniu w obliczeniach warunków po-miaru stanowi określenie korelacji fazy napięcia indukowanego oraz na-pięcia sieciowego. O ile fazę napięcia indukowanego można określić z pomierzonego przebiegu, o tyle faza napięcia sieciowego jest przypad-kowa i trudna do przewidzenia, jednak wzajemna korelacja faz obu na-pięć ma bardzo duży wpływ na występujące bezpośrednio po załączeniu napięcia udary prądu i momentu elektromagnetycznego
Rys.5.48. Przebieg napięcia fazowego i prędkości obrotowej podczas wybiegu
silnika i w początkowym okresie hamowania przeciwprądem
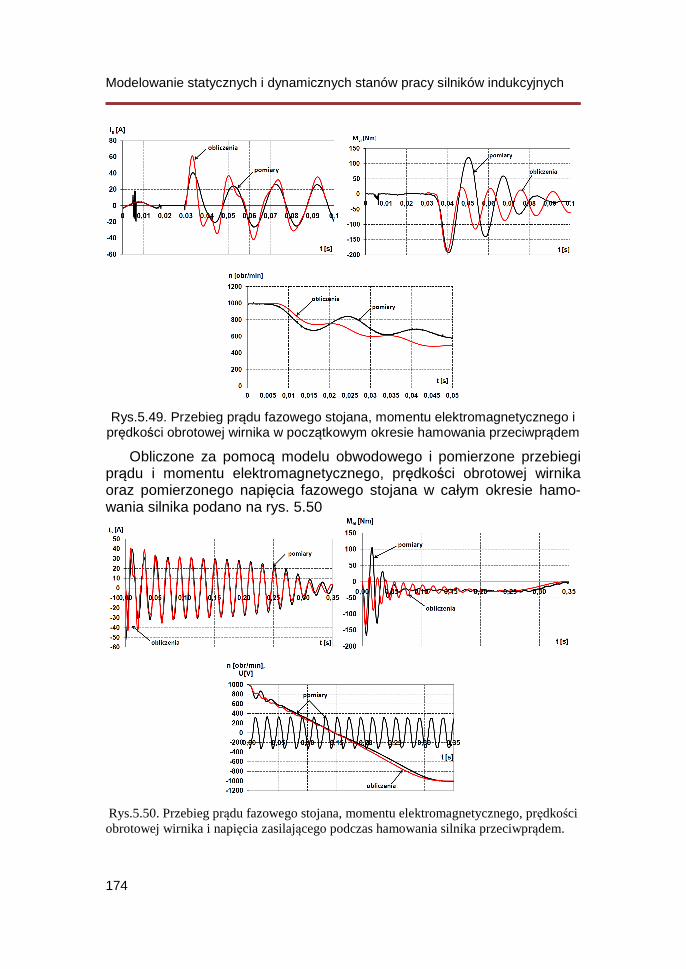
Na rys.5.49 przedstawiono pomierzone i obliczone przebiegi prądu fazowego stojana oraz momentu elektromagnetycznego, w stanie usta-lonym przy biegu jałowym, oraz w ciągu pierwszych kilku okresów, bez-pośrednio po załączeniu napięcia po przerwie beznapięciowej, przy zmienionej kolejności faz.
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
174
Rys.5.49. Przebieg prądu fazowego stojana, momentu elektromagnetycznego i
prędkości obrotowej wirnika w początkowym okresie hamowania przeciwprądem
Obliczone za pomocą modelu obwodowego i pomierzone przebiegi prądu i momentu elektromagnetycznego, prędkości obrotowej wirnika oraz pomierzonego napięcia fazowego stojana w całym okresie hamo-wania silnika podano na rys. 5.50
Rys.5.50. Przebieg prądu fazowego stojana, momentu elektromagnetycznego, prędkości obrotowej wirnika i napięcia zasilającego podczas hamowania silnika przeciwprądem.
5. Modelowanie wybranych stanów pracy silników indukcyjnych
175
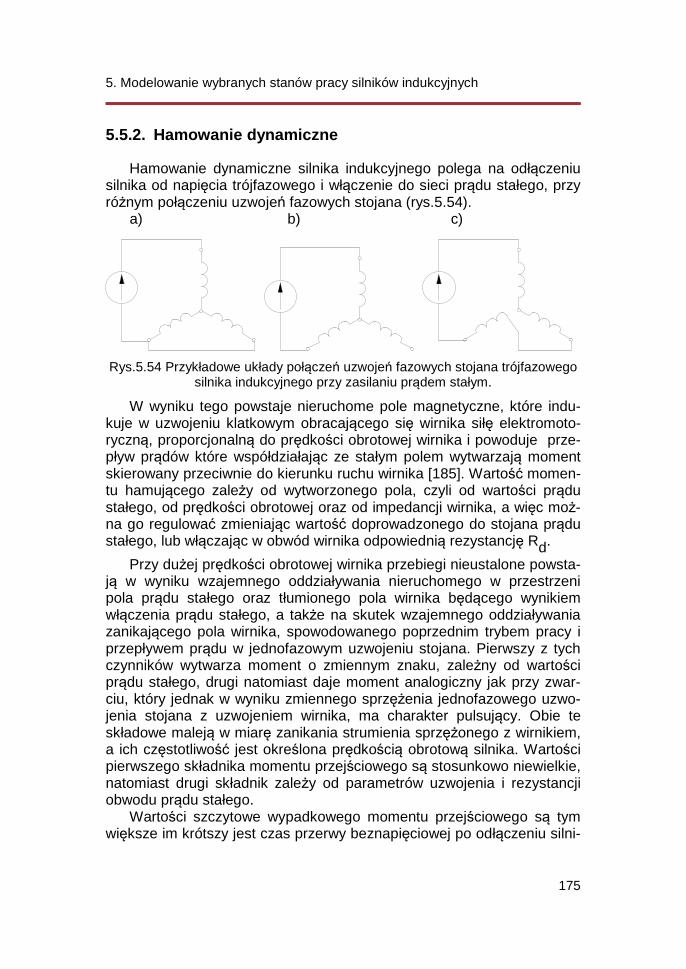
5.5.2. Hamowanie dynamiczne
Hamowanie dynamiczne silnika indukcyjnego polega na odłączeniu silnika od napięcia trójfazowego i włączenie do sieci prądu stałego, przy różnym połączeniu uzwojeń fazowych stojana (rys.5.54).
a) b) c)
Rys.5.54 Przykładowe układy połączeń uzwojeń fazowych stojana trójfazowego
silnika indukcyjnego przy zasilaniu prądem stałym.
W wyniku tego powstaje nieruchome pole magnetyczne, które indu-kuje w uzwojeniu klatkowym obracającego się wirnika siłę elektromoto-ryczną, proporcjonalną do prędkości obrotowej wirnika i powoduje prze-pływ prądów które współdziałając ze stałym polem wytwarzają moment skierowany przeciwnie do kierunku ruchu wirnika [185]. Wartość momen-tu hamującego zależy od wytworzonego pola, czyli od wartości prądu stałego, od prędkości obrotowej oraz od impedancji wirnika, a więc moż-na go regulować zmieniając wartość doprowadzonego do stojana prądu stałego, lub włączając w obwód wirnika odpowiednią rezystancję Rd.
Przy dużej prędkości obrotowej wirnika przebiegi nieustalone powsta-ją w wyniku wzajemnego oddziaływania nieruchomego w przestrzeni pola prądu stałego oraz tłumionego pola wirnika będącego wynikiem włączenia prądu stałego, a także na skutek wzajemnego oddziaływania zanikającego pola wirnika, spowodowanego poprzednim trybem pracy i przepływem prądu w jednofazowym uzwojeniu stojana. Pierwszy z tych czynników wytwarza moment o zmiennym znaku, zależny od wartości prądu stałego, drugi natomiast daje moment analogiczny jak przy zwar-ciu, który jednak w wyniku zmiennego sprzężenia jednofazowego uzwo-jenia stojana z uzwojeniem wirnika, ma charakter pulsujący. Obie te składowe maleją w miarę zanikania strumienia sprzężonego z wirnikiem, a ich częstotliwość jest określona prędkością obrotową silnika. Wartości pierwszego składnika momentu przejściowego są stosunkowo niewielkie, natomiast drugi składnik zależy od parametrów uzwojenia i rezystancji obwodu prądu stałego. Wartości szczytowe wypadkowego momentu przejściowego są tym większe im krótszy jest czas przerwy beznapięciowej po odłączeniu silni-
Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
176
ka od sieci, przed włączeniem prądu stałego, gdyż wówczas pole nie-stłumione w silniku ma dużą wartość. Jeżeli czas odłączenia silnika bę-dzie na tyle duży, że pole niestłumione praktycznie zaniknie, to wystąpią tylko momenty wywołane włączeniem prądu stałego, które praktycznie nie wpływają na moment hamujący silnika.
Wartość doprowadzonego do stojana prądu stałego powinna być tak dobrana, aby przepływy zasilanych uzwojeń dodawały się do siebie, wy-twarzając odpowiednio silny strumień.
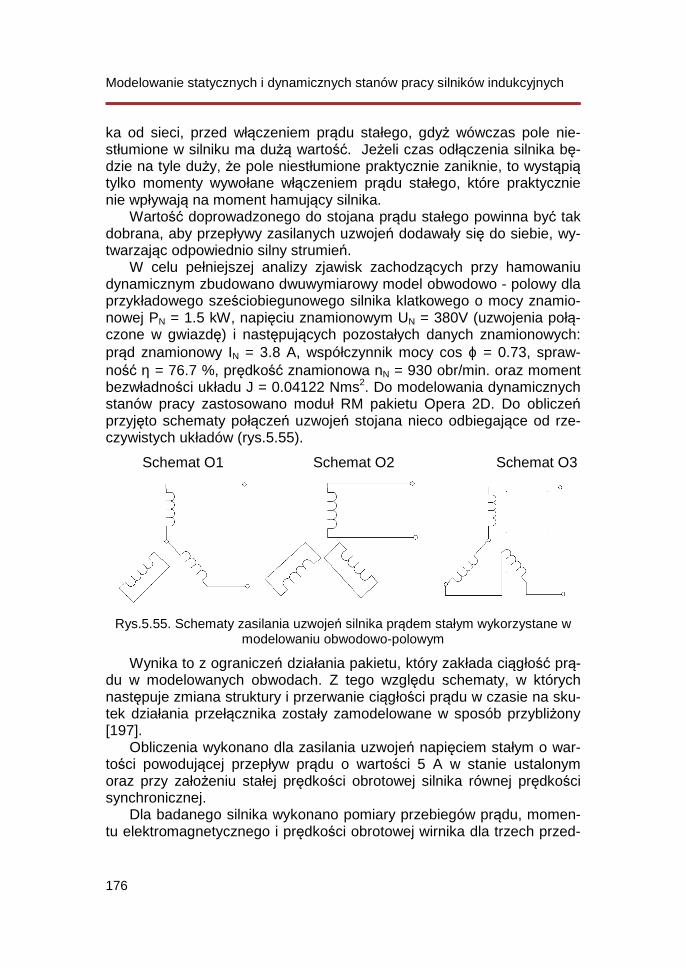
W celu pełniejszej analizy zjawisk zachodzących przy hamowaniu dynamicznym zbudowano dwuwymiarowy model obwodowo - polowy dla przykładowego sześciobiegunowego silnika klatkowego o mocy znamio-nowej PN = 1.5 kW, napięciu znamionowym UN = 380V (uzwojenia połą-czone w gwiazdę) i następujących pozostałych danych znamionowych: prąd znamionowy IN = 3.8 A, współczynnik mocy cos ϕ = 0.73, spraw-ność η = 76.7 %, prędkość znamionowa nN = 930 obr/min. oraz moment bezwładności układu J = 0.04122 Nms2. Do modelowania dynamicznych stanów pracy zastosowano moduł RM pakietu Opera 2D. Do obliczeń przyjęto schematy połączeń uzwojeń stojana nieco odbiegające od rze-czywistych układów (rys.5.55).
Schemat O1 Schemat O2 Schemat O3
Rys.5.55. Schematy zasilania uzwojeń silnika prądem stałym wykorzystane w
modelowaniu obwodowo-polowym
Wynika to z ograniczeń działania pakietu, który zakłada ciągłość prą-du w modelowanych obwodach. Z tego względu schematy, w których następuje zmiana struktury i przerwanie ciągłości prądu w czasie na sku-tek działania przełącznika zostały zamodelowane w sposób przybliżony [197].
Obliczenia wykonano dla zasilania uzwojeń napięciem stałym o war-tości powodującej przepływ prądu o wartości 5 A w stanie ustalonym oraz przy założeniu stałej prędkości obrotowej silnika równej prędkości synchronicznej.
Dla badanego silnika wykonano pomiary przebiegów prądu, momen-tu elektromagnetycznego i prędkości obrotowej wirnika dla trzech przed-
5. Modelowanie wybranych stanów pracy silników indukcyjnych
177
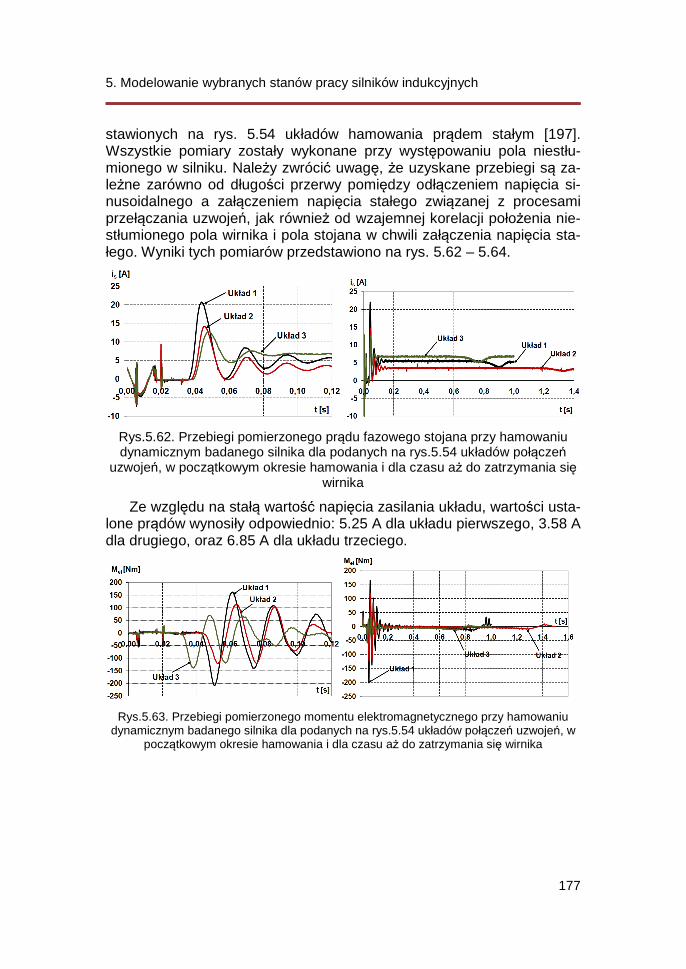
stawionych na rys. 5.54 układów hamowania prądem stałym [197]. Wszystkie pomiary zostały wykonane przy występowaniu pola niestłu-mionego w silniku. Należy zwrócić uwagę, że uzyskane przebiegi są za-leżne zarówno od długości przerwy pomiędzy odłączeniem napięcia si-nusoidalnego a załączeniem napięcia stałego związanej z procesami przełączania uzwojeń, jak również od wzajemnej korelacji położenia nie-stłumionego pola wirnika i pola stojana w chwili załączenia napięcia sta-łego. Wyniki tych pomiarów przedstawiono na rys. 5.62 – 5.64.
Rys.5.62. Przebiegi pomierzonego prądu fazowego stojana przy hamowaniu dynamicznym badanego silnika dla podanych na rys.5.54 układów połączeń
uzwojeń, w początkowym okresie hamowania i dla czasu aż do zatrzymania się wirnika
Ze względu na stałą wartość napięcia zasilania układu, wartości usta-lone prądów wynosiły odpowiednio: 5.25 A dla układu pierwszego, 3.58 A dla drugiego, oraz 6.85 A dla układu trzeciego.
Rys.5.63. Przebiegi pomierzonego momentu elektromagnetycznego przy hamowaniu dynamicznym badanego silnika dla podanych na rys.5.54 układów połączeń uzwojeń, w
początkowym okresie hamowania i dla czasu aż do zatrzymania się wirnika

Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
178
Rys.5.64. Przebiegi pomierzonej prędkości obrotowej wirnika przy hamowaniu dynamicznym badanego silnika dla podanych na rys.5.54 układów połączeń
uzwojeń, w początkowym okresie hamowania i dla czasu aż do zatrzymania się wirnika
Porównując wyniki obliczeń uzyskane z modelu obwodowo – polo-wego dla pierwszego układu połączeń z wynikami pomiarów można stwierdzić, że wartość momentu maksymalnego pojawiającego się pod-czas hamowania uzyskana z pomiarów jest zbliżona do wartości oblicze-niowej. Na różnice tych wartości ma wpływ sposób modelowania zjawisk w trzeciej fazie silnika, która dla celów obliczeniowych pozostaje zwarta w czasie hamowania. Otrzymane wyniki mogą jednak stanowić cenną informację dla konstruktora lub użytkownika układu napędowego.
Przy budowie obwodowego modelu matematycznego maszyny in-dukcyjnej umożliwiającego obliczanie przebiegów elektromechanicznych podczas hamowania dynamicznego należy uwzględnić różne układy galwanicznych połączeń uzwojeń fazowych maszyny, wprowadzające więzy elektryczne, stanowiące ograniczenia dla swobody zmian prądów i strumieni magnetycznych skojarzonych z tymi uzwojeniami [166]. W związku z tym, zachowując ogólną strukturę modelu matematycznego silnika indukcyjnego z wieloobwodowym odwzorowaniem klatki wirnika w postaci (2.52) należy dodatkowo wprowadzić następujące ograniczenia, narzucone na kompleksory napięcia i prądu stojana: Dla pierwszego układu połączeń uzwojeń fazowych stojana (rys.5.54.a), przy zasilaniu uzwojenia stojana napięciem stałym Ust, model obwodowy silnika indukcyjnego określony zależnością (2.52) przyjmie postać:
∑=
−
−=
−−=
N
imsrim M
Jp
LjJp
dtd
RMKjMdtd
1
*2
1
})(Re{
}][]][[{][
II
IIUI
ω
ω (5.6)
gdzie: { } ( ) 0;32
;, ==== rstsxsrs UUuUUUU
5. Modelowanie wybranych stanów pracy silników indukcyjnych
179
{} ( ) ( )∑=
+=+==N
iryirxirsysxsrs jiiIjiiIII
1
;:,I
Dla układu drugiego (rys.5.54.b) transformacja modelu matematycz-nego silnika indukcyjnego w układzie współrzędnych fazowych do pro-stokątnego układu współrzędnych (x,y,0) powoduje wyeliminowanie rów-nań napięciowych dla jednej ze składowych prądów w osi x lub y oraz dla składowej zerowej. Ze względu na niesymetrię spowodowaną przez wię-zy dla tego układu, prostokątny układ współrzędnych musi być w tym przypadku nieruchomy względem stojana. Podobna sytuacja występuje dla układu trzeciego (rys.5.54.c), przy czym w tym przypadku występuje dodatkowo składowa zerowa prądu stojana, której wartość jest propor-cjonalna do składowej x lub y, w zależności od tego, która z nich została przyjęta jako zmienna niezależna.
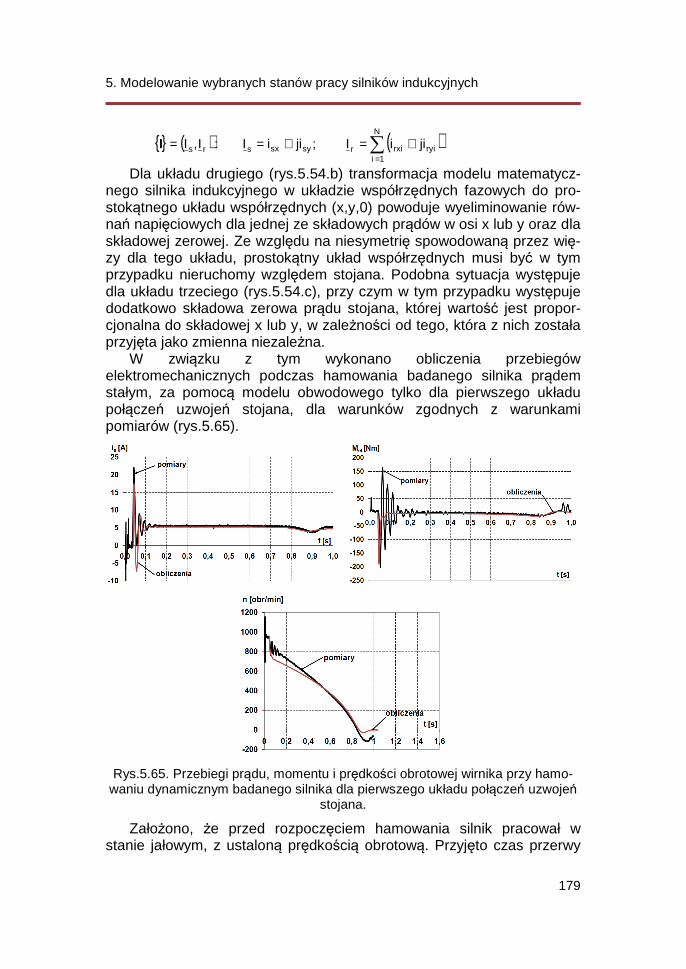
W związku z tym wykonano obliczenia przebiegów elektromechanicznych podczas hamowania badanego silnika prądem stałym, za pomocą modelu obwodowego tylko dla pierwszego układu połączeń uzwojeń stojana, dla warunków zgodnych z warunkami pomiarów (rys.5.65).
Rys.5.65. Przebiegi prądu, momentu i prędkości obrotowej wirnika przy hamo-
waniu dynamicznym badanego silnika dla pierwszego układu połączeń uzwojeń stojana.
Założono, że przed rozpoczęciem hamowania silnik pracował w stanie jałowym, z ustaloną prędkością obrotową. Przyjęto czas przerwy

Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych
180
beznapięciowej, po odłączeniu zasilania uzwojenia trójfazowego napięciem przemiennym jako równy tp = 0.04 s, podczas którego nastąpił wybieg swobodny silnika, po czym nastąpiło przełączenie uzwojeń i załączenie na zaciski silnika napięcia stałego, o tak dobranej wartości, aby w uzwojeniu stojana popłynął prąd stały o wartości równej 5.25 A.
Obliczenie przebiegów elektromechanicznych silnika po załączeniu napięcia stałego dokonano z wykorzystaniem modelu obwodowego (5.6), przy warunkach początkowych wyznaczonych w wyniku obliczenia wybiegu silnika. Jak wynika z porównania pomierzonych i obliczonych przebiegów, uzyskano zadawalającą zgodność wyników w całym okresie hamowania.





























![EB 2013 [tryb zgodności] - Kierunek Energetyka...Oferta Sterling SIHI Kompletne jednostki pró żniowe z pompami pró żniowymi zapewniaj ą Slide 14 stabilno ść pracy w du żym](https://img.dokumen.tips/doc/110x75/60c1df0cebf8f77e29494ca5/eb-2013-tryb-zgodnoci-kierunek-energetyka-oferta-sterling-sihi-kompletne.jpg)