Embed Size (px)
Citation preview

Modeling road traffic flow with queueing theoryAn exploration of performance for different scheduling disciplines in queueing networks
Sebastiaan Vermeulen
July 15, 2016
Bachelorproject wiskunde
Supervisor: prof. dr. Rudesindo Nunez Queija
Korteweg-de Vries Instituut voor Wiskunde
Faculteit der Natuurwetenschappen, Wiskunde en Informatica
Universiteit van Amsterdam

AbstractThis paper considers traffic flow networks as queueing networks where bottlenecks in the trafficflow network are modeled as servers. Singular intersections and intersections chained by a greenwave traffic flow are considered in more detail. The FIFO, priority and exponential polling servingdisciplines are analytically analyzed under the assumption of exponential service times, Poissonarrivals and preemptive-resume polling. Expressions for the individual mean sojourn time arederived for all models. The individual queue length distribution is analytically analyzed for eachserving discipline, and for all models except the green wave priority polling discipline with lowpriority for the green wave, expressions for the individual queue length distributions are derived.Simulations show that the influence on the queue length distribution and the mean sojourntime of using nonpreemptive polling and of different serving time distributions is marginal whenconsidered separately, but can have dramatic effects when considered jointly.
Title: Modeling road traffic flow with queueing theoryAuthors: Sebastiaan Vermeulen, [email protected], 10834842Supervisor: prof. dr. Rudesindo Nunez QueijaDate: July 15, 2016
Korteweg-de Vries Instituut voor WiskundeUniversiteit van AmsterdamScience Park 105-107, 1098 XH Amsterdamhttp://www.science.uva.nl/math

Contents
Introduction 1Performance measures 2
Preliminaries 3Distributions 3Transitions, Markov chains 4Equilibrium distribution 5PASTA 5Little’s law 5Kendall’s notation 6Transforms and their notations 6Notational conventions 6
Simple intersections 8First-In-First-Out 8
Equilibrium probabilities 9
Expected sojourn time 10
Ranking the arrivals 10
Preemptive-resume scheduling 10
Expected remaining service time 11
Priority queueing 11
Expected sojourn time 11
Equilibrium distributions 12
Exponential polling 14
Equilibrium distributions 14
Expected sojourn time 15
The green wave 16Priority queueing: green wave first 16
Expected sojourn time 16
Equilibrium distributions 17
Priority queueing: green wave last 17
Equilibrium distribution 17
Expected sojourn time 17
Exponential polling 18
Expected sojourn time 18
Equilibrium distribution 18
Simulations 19influence of assumptions 19
Preemption 19
Exponential serving times 20
Discussion 22Populaire samenvatting 23
B

1 IntroductionBetween 1960 and present, the vehicle population has been growing steadily at a rate four timesthat of the human population (Dargay et al. 2007, United States Census Bureau 2016). To managethis increase of traffic load at minimal cost for governing authorities in such a manner that roadusers face the least delay and the impact for other parties is minimized, efficient traffic controlsystems are needed which optimize the sojourn time and other factors dynamically, adapting tochanges in the traffic load.
When it comes to building new roads or updating existing infrastructure, authorities facedesign decisions which influence parameters such as construction and maintenance cost, but alsoexpected sojourn time for commuters, sensitivity to congestion and impact on air quality. To beable to make optimal design decisions it is necessary to gain insight in how traffic network designinfluences these parameters.
Consequentially there is the desire to model traffic flow networks. Current literature employsdifferent types of models. The first distinction I wish to make is between deterministic andstochastic models. Deterministic models often consider traffic flow either from the perspective offluid dynamics (Jabari 2016, Ji & Geroliminis 2012) or as interacting particles, where the particlesare made sentient beings by equipping them with a set of decision rules (Kerner 2004, Jin 2013).The former approach, known as macroscopic traffic flow modeling, describes the emergent behaviorof traffic flow networks via differential equations which can be solved to find equilibrium states ofrelevant quantities such as the traffic density and speed on road segments. The latter approach,fittingly named microscopic traffic flow modeling, assumes that the behavior of individual roadusers can be modeled via functions of contextual parameters such as the distance to the precedingroad user.
Microscopic traffic models offer the advantage of exposing emergent behavior over macroscopicmodels, which makes them more suitable for modeling for example pollutant emissions (Gan et al.2011). However, such models pose computational difficulties when used to model larger trafficnetworks as shown by Jha et al. (2004).
Micro- and macroscopic models require the use of either empirical or simulated data, fromwhich results can be inferred with assumed certainty. This stringent dependency on the correctspecification of input limits the predictive power of such models, thus limiting their use in decisionprocesses (Jain & Smith 1997). To increase the robustness of microscopic traffic models thebehavior of individual road users can be randomized (Kerner & Klenov 2006, Jabari & Liu 2012).
An altogether different modeling methodology is to model not the flow of traffic, but the delaytraffic encounters. These queueing models can then be analytically assessed with results fromthe mathematical domain of queueing theory. An extensive review of queueing models used todescribe traffic flow is given by Van Woensel & Vandaele (2007). This paper points out thatqueueing models do not curtail behavioral insights to the same level of detail as well-describedmicroscopic models, in favor of a high predictive accuracy and robustness of the results. Moreover,the computations required for queueing models remain tractable as the complexity of the modelednetwork increases, and the analytic coupling between input parameters and results provides adirect explanation of the found results.
Queueing models of singular traffic bottlenecks can be combined to model traffic networks inthe form of a queueing network. Queueing networks can be either closed, open or mixed. Openqueueing networks assume that road users enter the network at some point, travel some routethrough the network and then leave the network again. In closed networks the road users never
1

enter or leave the system and their total number is fixed, while in mixed networks some roadusers behave as if they were in an open network, while other behave as if they were in a closednetwork. For the modeling purpose intended by this paper only open networks are applicable.Queueing networks are directed graphs of queue nodes representing bottlenecks, connected viaarcs representing possible routes that road users may follow within the network. Bottlenecks canrange from intersections to entrance- and exit ramps, or even straight sections of road. The lattercan be viewed as a bottleneck in the sense that for any given maximum speed, the number of carsthat can pass in any time window is limited. Consider Figure 2.1 for a graphical representationof a queueing network.
Two particular instances of such bottlenecks are studied in this paper. Firstly a singleintersection with an arbitrary number of intersecting traffic flows is considered. Secondly a ‘greenwave’ is modeled as a chain of intersections with on each intersection traffic flows that do notdirectly interact except via a single traffic flow passing through the chain of intersections, whichis not allowed to advance except immediately to the end of the chain.
This paper consists of four parts. In chapter 2, the preliminaries required for the analysis areintroduced. In chapter 3 individual intersections are modeled and a number of control processesfor these intersections are analyzed . Then the analysis is repeated for ‘green-wave’-systems inchapter 4, where a number of intersections are chained such that one flow of traffic is guaranteedimmediate passage at all but the first intersection in the chain. Lastly a number of simulationsare run to quantify the effect of some of the simplifying assumptions that are made during theanalysis. We end with a joint discussion of the results from theory and simulation.
1.1 Performance measuresTo evaluate the models, two performance measures are considered in this paper. The first measureis the mean sojourn time per queue, which is the average time a customer spends in the system(both waiting in the queue and in service). The second measure is the equilibrium distribution ofthe number of customers in the system. This measure is highly relevant when studying trafficmodels because of the finite capacity of physical systems. While in our theoretical models wewill allow for an infinite capacity of the queue, when a queue for one intersection extends to thepreceding intersection, this intersection can no longer let traffic pass and this complication is notcontained within the model.
2

2 PreliminariesThe analysis and simulations are based on results from queueing theory, an area of mathematicalanalysis that relies heavily on the theory of Markov processes. Specifically, a bottleneck is modeledas a node in a network of servers and road users arriving at intersections are modeled as customersjoining the queue of the server. Consider Figure 2.1 for an exhibit. In this section some importantresults that will be used in this paper are treated. Because of the intimate connection withqueueing theory, we will stick to using the generic queueing terminology as much as possiblethroughout this paper. As is customary in queueing theory, our model of an intersection can bedescribed by two components. New customers arrive at a queue according to an independentstochastic process, which throughout this paper will be a Poisson process. Then the queuedcustomers are served one-at-a time by the server, where the serving time is randomly distributed.When the queue is empty the server is idle, whilst if there are customers in the queue, the serverdoes not pause until the queue is empty again.
server orbottleneck
queue
directionof traffic
Figure 2.1 Left: Representation of a server and queue. Right: A queueing network to describe a trafficflow network consisting of 6 bottlenecks. Traffic enters the network at the left- and bottom side of thegraph, then travels past a number of bottlenecks before leaving at the top- and right side of the figure.
2.1 DistributionsFor the sake of completeness, we state here the functional specifications of the distribution familiesthat wil be used thoughout this paper.
2.1: Poisson distribution
A random variable X is said to be Poissondistributed with rate λ if for k ∈ N
P[X = k] = e−λλk
k!
which is denoted as X ∼ Poisson (λ).
2.2: Exponential distribution
A random variable X is said to be ex-ponentially distributed with rate λ if forx ∈ [0,∞)
P[X < x] =
∫ x
0
λe−tλdt
which is denoted as X ∼ Exp (λ).
3

2.3: Geometric distribution
A random variable X is said to be geometrically distributed with probability p if for k ∈ N
P[X = k] = (1− p)k−1p
which is denoted as X ∼ Geom (p).
In addition, a Poisson process A(t) with rate λ is a function on [0,∞) where A(t) ∼ Poisson (λt).
2.2 Transitions, Markov chainsA stochastic process describes the evolution of a random variable on a state space S in time. Itcan either be a sequence, in which case we speak of a discrete process, or a function [0,∞)→ S,in which case we speak of a continuous process. Markov chains are stochastic processes on acountable state space that respect the Markov property. The Markov property states that theevolution of the stochastic process at any time may depend on the current state of the process,but is independent from all the past states that the process has been in.
Formally we let for t ∈ [0,∞) (resp. t ∈ N) M(t) be a stochastic process on the countablestate space S ⊂ N. If the Markov property (equation 2.4) holds, then M(t) is a continuous-time(resp. discrete-time) Markov chain.
2.4: Markov property (for Markov processes)
A process M(t) has the Markov property if
P[M(t+ s) = j |M(s) = i] = P[M(t) = j |M(0) = i] = pij(t)∀s.
The transition probabilities pij(t) are the probabilities of the process M being in state j aftert units of time, given that M started in state i at time 0. Let Jn denote the time at which the nth
transition is made, then the sequence {Mn} = {M(Jn)}∞n=0 is an embedded Markov chain, whichis a discrete Markov chain whose equilibrium distribution is directly related to the equilibriumdistribution of M(t). Embeddings are not unique in the sense that any continuous chain has anarbitrary number of embeddings; consider that, {Mn} = {M(Jnk)} is an embedded Markov chainfor each k ∈ N.
Let us return to the single server with single queue depicted in Figure 2.1(Left). We assumePoisson arrivals with rate λ for the customers and we assume that the server finishes serving acustomer in a period that is exponentially distributed with rate µ. The number of customerswaiting in the queue now constitutes the continuous-time Markov chain Π(t) with state spaceN. Given the current queue length, with rate λ the queue length will increase by one and ifthe queue is not empty, with rate µ the queue length will decrease by one. Now we note thatthe exponential distribution has the following property: If A ∼ Exp (a) and B ∼ Exp (b), thenP[A < B] = a
a+b . If we define pij as the probability that state i is succeeded by state j, then thepij are given by
pij =
1 if j − 1 = i = 0λ
λ+µ if j − 1 = i > 0µ
λ+µ if j + 1 = i > 0
0 else.
and these quantities describe the transition probabilities of the discrete Markov chain Pn embedded
4

in Π(t) at the ‘jump moments’ Jn; Pn = Π(Jn). If a different embedding is chosen other transitionprobabilities arise. These probabilities are key to our analysis because via balance equations theylead to the steady-state distribution, whose definition and purpose are given in the next section.
2.3 Equilibrium distributionIf pij(t) is strictly positive for each i, j ∈ S, t ∈ R+ then the Markov chain admits an equilibriumdistribution which equals the long-run proportion of time spent in each state. By definition, the in-and outflux of a state must match in the long-run equilibrium, where flux is given by the transitionprobabilities in the embedded chain and given by the transition rates in the continuous chain, inboth cases weighted by the equilibrium distribution. This necessary condition on equilibriumdistributions is known as the global balance condition (Chandy 1972, Ross 2010b):
2.5: Global balance condition
If π = {πi} is an equilibrium distribution of the Markov process Π(t) (resp. Pn), then thefollowing holds: ∑
k∈S\{i}
πiγik =∑
k∈S\{i}
πkγki for all i ∈ S
where the γij are transition rates of Π(t) (resp. transition probabilities of Pn). Theseequations can also be combined for different states to obtain balance equations betweensets of states.
From these equations one can often infer a recurrence relation on the equilibrium distribution,which then sometimes can be solved to yield π. A practical tool we shall use to study theseequations is the transition graph, which visualizes the possible one-step transitions from anarbitrary state. A necessary condition for balance at each node is balance at each cut of thetransition graph, a result which will prove convenient in solving more complex balance equations.A more extensive treatise of Markov chains and equilibrium distributions can be found in Norris(1998), Ross (2010a).
2.4 PASTAPoisson Arrivals See Time Averages, or PASTA, is a specific case of the Arrival theorem whichholds under the very basic assumptions that arrivals are Poisson and not anticipated by theobserved process (Wolff 1982). The Arrival theorem states that open queueing networks (c.f.Figure 2.1(Right)) with unrestricted queues and independent service times, observed at arrivalmoments exert the same equilibrium distribution as the continuous queueing network itself. Bythe virtue of Burke’s theorem (Burke 1956), the departure process in queueing networks withPoisson arrivals and unrestricted queues also constitutes a Poisson arrival process. Consequentiallythe expected number of customers and the expected sojourn time of a queueing network canbe derived from the discrete Markov chain that is embedded at either the arrival- or departuremoments in the continuous Markov chain describing the system. A more detailed exposition ofthe Arrival theorem with less strict sufficient conditions is given in Boucherie & van Dijk (1997).
2.5 Little’s lawIntuitively it makes sense that in the long run, the number of customers in a system L equalsthe number of arrivals per time unit λ multiplied by the time that one customer resides in thesystem W :
5

2.6: Little’s law
E[L] = λE[W ]
For a fixed finite time T the relationship is even trivial: TET [L(t)] and λTET [W (t)]1 aretwo ways of expressing the total time customers have spent in the system. In Little (1961) it isproven that this rule holds for any system that deals with arrivals with average arrival rate λthat spend a stochastic length of time in the system. Little’s law is valid under remarkably looseassumptions: It holds as long as the arrival rate has an average and E[W ] is finite.
2.6 Kendall’s notationThe de facto notation to describe queueing nodes comes from Kendall (1953). The basic formreads A/S/n, where A denotes the type of arrival process, S denotes the serving process and ndenotes the number of servers. In this paper, A and S will most often be Markovian processes,e.g. a Poisson arrival process and exponential service times, and a queue will face a single server.Such queues are denoted as M/M/1.
2.7 Transforms and their notationsWe will employ the Laplace-Stieltjes Transform (LST) and the Probability Generating Function(PGF) in this paper, both of which are defined for non-negative random variables. Both transformsare injective mappings of the probability density resp. mass function such that we may switcharbitrarily2 back and forth to whatever form is most suitable for the calculations at hand.
2.7: Laplace-Stieltjes Transform (LST)
Let F be the cumulative density function of random variable X. The LST is a mappingX 7→ φ such that:The LST of X is a function φ : [0,∞)→ R defined as φ(s) =
∫∞0e−stdF (t).
2.8: Probability Generating Function (PGF)
let the countable set {pi} be a probability mass of random variable Y . The PGF is amapping Y 7→ ψ such that:The PGF of Y is a function ψ : (−1, 1]→ R defined as ψ(z) =
∑∞k=0 z
kpk.
If a closed form is known for ψ(z), then pk can be found by determining the k-th derivativewith respect to z and letting z ↓ 0.
2.8 Notational conventionsWe conclude this chapter with an overview of the notation that is used throughout this paper. Ifa model with multiple queues is considered, each queue will be identified by a subscripted indexand the queue obtained by joining all queues in a single queue is identified by the absence of asubscript. Moreover, the following processes are associated with queue i:
1These averages are taken over time: ET [L] =∫ T0 L(t)/Tdt and ET [W ] =
∫ T0 W (t)/Tdt.
2Limited only by our own algebraic abilities; retrieving a distribution function from the LST or PGF can betedious, to say the least.
6

• Ai(t), the arrival process with arrival rate λi;• Lqi (t), the queue length;• Li(t), the number of customers in the system;• Wi(t), the average sojourn time of customers in the system.
If an equilibrium distribution exists for the queue length, the latter 3 processes of the foregoing listhave equilibrium distributions. Their random variables are denoted by Lqi , Li and Wi respectively.
7

3 Simple intersectionsIn this chapter we will review the properties of a model in which two classes of customers mustcompete for a single server in a network of servers, by which we represent an intersection ina traffic flow network. We assume that customers arrive at each node according to a Poissonprocess and that service times are exponentially distributed.
In fact, if customers enter the system according to a Poisson process and each node behavesas a single queue and server with exponential service times, Burke’s theorem (Burke 1956) statesthat indeed each node observes Poisson arrivals. These conditions however do not hold for all ofthe models we shall consider.
We start by reviewing a single node in this network, which by the preceding is a slightadaptation of an M/M/1 queue since a single server is shared by multiple queues. A graphicalrepresentation of the foregoing is given in figure 3.1. At queues 0 resp. 1, customers arriveaccording to a poisson process with arrival rates λ0 resp. λ1. The server X can only processone customer at a time, and does so at rate µ, independent of the class of the customer. In thecoming sections we consider different methods to distribute the work to the server – that is, weconsider different methods to direct traffic at intersections.
x X(µ)
1(λ1)
0(λ0)
Figure 3.1 A single server X serving at rate µ in a queueing network and the two competing classes 0and 1 with arrival rates λ0 resp. λ1 are considered as an independent segment of the network, whichwe can then separately analyze.
3.1 First-In-First-OutWhen we assume that the customers in queue 0 and 1 are processed by X on a First-In-First-Out(FIFO) basis, the model becomes essentially equivalent to a queueing process with arrival rateλ0 + λ1 and departure rate µ. This is due to the fact that after a customer joined the queue, itbecomes irrelevant from which arrival process he spawned. Therefore in the FIFO model the twoqueues can be thought of as a single queue where customers of both classes join in their order ofarrival. The number of customers in this queue thus is the sum of the number of customers in
8

queue 0 and the number of customers in queue 1. Furthermore, if we denote the Poisson arrivalprocesses of queue i at time t with Ai(t), then
P[A0(t) +A1(t) = k] =
k∑n=0
P[A0(t) = n,A1(t) = k − n] =
k∑n=0
(e−λ1t
(λ1t)k−n
(k − n)!
)(e−λ0t
(λ0t)n
n!
)
=e−(λ1+λ0)t
k!
k∑n=0
(k
n
)tnλk−n1 λn0 = e−(λ1+λ0)t (λ0 + λ1)ktk
k!
shows us that the sum of two Poisson distributions is again Poisson distributed. This statementcan be generalized to countable sums of Poisson processes via induction. For now however, wefocus on the case with two classes.
Equilibrium probabilitiesLet us first find the proportion of time πn that there are n customers in the system. We startby describing the transition matrix, from there we find and solve the balance equations whichgive us the steady state equilibria. To this end, note that if there are n > 0 customers in thesystem, the possible transitions are to n− 1 or to n+ 1. The transition rate to n− 1 equals thedeparture rate µ, and by the preceding result, the transition rate to n+ 1 equals λ = λ0 + λ1.The state transitions and their rates are depicted in Figure 3.2.
0 1 . . . n− 1 n n+ 1 . . .
λ
µ
λ
µ
λ
µ
λ
µ
λ
µ
λ
µ
Figure 3.2 State transitions in the FIFO model with total arrival rate λ and departure rate µ.
From Figure 3.2 we can determine the balance equations:
∞∑i=0
πi = 1, λπ0 = µπ1, (λ+ µ)πi = λπi−1 + µπi+1 for i > 0.
These equations admit the solution
πi = ρiπ0 where ρ =λ
µ. (1)
The first equation now yields π0 = 1− ρ and the condition that ρ < 1, for otherwise the serieswill not converge. ρ is known as the occupation rate as it, when it is smaller than 1, denotes thefraction of time that the server is occupied. Let for future reference ρi denote λi/µ.
To find the equilibrium probabilities of each queue, consider the Markov chain Q describingthe ordered queue: Define p = 1− q = λ0
λ0+λ1, the probability that the next arrival is of type 0,
and denote the state space as
S = {(x1, x2, . . . , xn) | xi ∈ {0, 1}, n ∈ N}
where xi denotes the type of the ith customer in the queue and n denotes the length of the queue.The following equality follows from independent arrivals, and because µ does not depend on thetype of customer:
P[Q = (x1, . . . , xn) | L = n] = pkqn−k
9

if xi = 0 for k distinct indices i. By deconditioning and counting the number of combinationswith xi = 0 for k distinct indices we find
P[L0 = k] =
∞∑n=k
P[L0 = k | L = n]πn =
∞∑n=k
(n
k
)pkqn−kρn(1− ρ) =
(1− ρ)(pρ)k
k!
∞∑n=k
(ρq)n−kn!
(n− k)!
=(1− ρ)(pρ)k
k!
(dk
d(ρq)n
∞∑n=k
(ρq)n
)=
(1− ρ)ρk0(1− ρ1)k+1
.
From this we can conclude that L0 + 1 ∼ Geom(
ρ01−ρ1
), and the distribution of L1 now follows
by symmetry.
Expected sojourn timeIn the FIFO model described above, the time average sojourn time E[W ] of customers can bedetermined using Little’s law. The time average total number of customers in the system E[L]can be determined from the steady states:
E[L] =
∞∑n=0
nπn = π0λ
µ
∞∑n=0
n
(λ
µ
)n−1
= π0λ
µ
d
dλµ
( ∞∑n=0
λ
µ
)n=
π0λ
µ(1− λ/µ)2=
λ
µ− λ.
From Little’s law we now deduce:
E[W ] =E[L]
λ=
1
µ− λ.
Since in the FIFO model the origin of the customer is not related to the position in the queueof an customer, we find that the expected time spent in the system also does not depend on ancustomer’s origin, ergo E[W0] = E[W1] = E[W ]. Via Little’s law we find that E[L0] = λ0
λ E[L]
and E[L1] = λ1
λ E[L], so the number of customers per queue in the system is proportional to thearrival rate of that queue.
3.2 Ranking the arrivalsOne might wonder what happens to the mean sojourn time when the classes of arrivals are ranked,such that we distinguish between high-priority arrivals and low-priority arrivals. We distinguishbetween priority queues where one class is given absolute priority over the other, and pollingsystems in which the server distributes its attention between classes according to more arbitraryrules. But first there is a remark on preemption to be made.
Preemptive-resume schedulingIn priority- and polling systems the situation may arise that the server is triggered to switch toanother queue while a customer is still in service. If this service is interrupted and later resumed,the scheduling discipline is considered preemptive-resume. If instead the current service iscompleted before the server switches to the next queue, the schedule is considered non-preemptive.For simplicity’s sake, we shall assume preemption during the remainder of the analytical treatise.The effect of this simplification will be analyzed in the chapter on simulations.
10

Expected remaining service timeIn the preceding, the equilibrium distribution was used to determine the expected sojourn time.An alternative method is provided by the grace of the PASTA property, following the lecturenotes of Adan & Resing (2002): An arbitrary arrival will spend E[W ] time in the system includinghis own (average) service time 1/µ, but also observes E[L] customers in the system upon arrival,each requiring on average 1/µ service time. Hence E[W ] = E[L]/µ+ 1/µ, which via Little’s lawreturns the same result. Note that one of the E[L] is in service with probability ρ upon saidarrival, however the expected remaining service time equals an entire service’s expected time bythe memorylessness of the exponentially distributed service times. In the case of non-memorylessservice times, the following general expression can be used for the expected remaining servicetime.
Let S denote the total service time of the service that has already started when our customerjoins the queue, and let RB denote the remaining time on that service. Since we are randomlyselecting a service time over time (consider Figure 3.3), the probability density of selectinga service time of length ` increases linearly with `. The probability density that a randomlyselected service has length ` is of course still dB(`). It follows that dS(x) = xdB(x)C−1 whereC−1 =
∫∞0xdB(x) = E[B] is a scaling constant. Given that a Poisson arrival happens during a
fixed time interval, the time of arrival is uniformly distributed within this period, such that
3.1: Distribution of remaining service time
dRB(s) =
∫ ∞s
1
tdS(t)ds =
∫∞s
dB(t)
E[B]ds =
P[B > s]
E[B]ds,
and we have
3.2: Expectation of remaining service time
E[RB ] =
∫ ∞0
tdRB(t) =
∫∞0t− tB(t)dt
E[B]=
t2
2 (1−B(t))∣∣∣∞0
+∫∞
0t2
2 dB(t)
E[B]=
E[B2]
2E[B].
Arrival moment
R
Bi−1 Bi Bi+1 = S Bi+2
Figure 3.3 The random remaining service time R upon the arrival of an agent into the queue. Theprobability of selecting a service interval depends on the probability B(t) of a service interval of thatlength occurring, as well as the length t of that interval.
3.3 Priority queueing
Expected sojourn timeIn priority queues arrivals of class 0 are given total priority; this means queue 1 is only served ifqueue 0 is empty, and is left to grow without bounds as long as the server is not done processingthe entire queue 0. Customers within the same class are served FIFO. This amendment with
11

respect to the regular FIFO 2-class model does not influence the total arrival rate or departurerate, nor does it impose restrictions on when the server may serve customers (just on the orderin which the customers are served). Therefore the quantities E[L] and E[W ] haven’t changedwith regard to the FIFO model. Moreover, the customers in queue 0 observe a regular M/M/1queue with arrival rate λ0 and departure rate µ.1 This fact becomes apparent if we realize thatcustomers of class 1 are queued separately from customers of class 0, and they are processedprecisely when there are no customers of class 0 in the system. We can therefore conclude thatthe number of type-0 customers in the system and their average time spent in the system aregiven by the equivalent quantities from an M/M/1 queue. To summarize:
E[W ] =1
µ− λ, E[W0] =
1
µ− λ0.
The customers in queue 1 however do not follow a regular M/M/1 queue. The class-1customers observe a server with exponential serving times, but also suffer from random serviceintermissions. Queueing models equipped with this property are denoted vacation models for theobvious reason. We can nevertheless find the time average number of customers and time spentin the system with relative ease. First of all, we have L0 + L1 = L, such that
E[L1] = E[L]− E[L0] =λ
µ− λ− λ0
µ− λ0=
µλ1
(µ− λ)(µ− λ0).
Now, we may apply Little’s law again to find
E[W1] =E[L1]
λ1=
µ
(µ− λ)(µ− λ0).
This expression quantifies the effect of an increase in the type-0 rate of arrival in priority queues.in FIFO queues, the average time spent in the system was equal for customers of all classes andan increase of the arrival rate of one class had the same effect on all classes. The fractionaltime-penalty for second tier customers is Eprio[W1]/Efifo[W1] = 1
λ(1−ρ0) , implying that the
low-priority penalty on the waiting time for type-1 customers grows hyperbolically with theproportion of the server’s capacity that is occupied by type-0 customers. Furthermore, sinceλ ≥ λ0 we have µ− λ ≤ µ− λ0, thus Eprio[W1] is finite if and only if the average time a customerwould spend in the equivalent FIFO system is finite.
Equilibrium distributionsThe customers in class 0 observe a regular M/M/1 queue, and therefore their equilibriumprobabilities are as was earlier derived in (1): πi,0 = ρi0(1 − ρ0). Since the total arrival- anddeparture rates haven’t changed, the equilibrium probabilities for the total number of customersremains πi = ρi(1− ρ).
The type-1 customers on the other hand observe random interruptions of their service whenevera type-0 customer arrives. During these vacations the type-1 queue grows with A1(BP ) customers,where BP is the length of a type-0 busy period and A1(t) is the type-1 Poisson arrival process.Using that conditional on BP , A1(BP ) is Poisson distributed, the conditional PGF of A1 is givenby e−λBP (1−z). Thus, denoting the LST of the busy period by φ(t), the PGF of the number oftype-1 arrivals during a vacation is given by
∞∑k=0
zkγk :=
∫ ∞0
e−λ1t(1−z)dBP (t) = φ(λ1(1− z)).
1This is not the case when we don’t use preemption.
12

Following the work of Nunez Queija (2000), we will first consider L1 only during non-vacationperiods by considering arrivals during a vacation as a batch arriving at the end of that vacation.Notice that the time until a vacation period is exponentially distributed with rate λ0 such thatthe preceding constitutes a Markov chain that sees departures at rate µ, single arrivals at rate λ1
and batch arrivals at rate λ0. The corresponding balance equation is given by
πn,1(λ0 + λ1 + µ) = πn−1,1λ1 + πn+1,1µ+ λ0
n∑k=0
πk,1γn−k.
Multiplying by zn+1, summing over n and splitting the Cauchy product of the rightmost summandyields a functional equation for the PGF of L1 during non-vacation periods which solves into
E[zL1 | L0 = 0] =(1− ρ1)(z(µ+ λ0 − ν)− λ0φ(λ1)) + λ1 − µz(λ0 + λ1 + µ)− µ− z2λ1 − zλ0φ(λ1(1− z))
.
During vacation periods the following can be said about L1: the PASTA property implies thatthe number of customers at the start of a vacation has the same distribution as L1 duringnon-vacations.
Next we wish to know the PGF ψ of the number of arrivals during the backwards recurrencetime of a vacation – that is, during the time since the start of the vacation. By symmetry, thebackward recurrence time of a vacation at a random arrival has the same distribution as theresidual vacation length at a random arrival, which we derived in (3.1). This gives the distributionof the number of arrivals during the backwards recurrence time as
P[A(RBP ) = k] =
∫ ∞0
P[A(t) = k]P[RBP = t]dt =
∫ ∞0
P[BP > t]
E[BP ]e−λ1t
(λ1t)k
k!dt.
Multiplied by E[BP ]λ1(1− z)zk, summed over k ∈ N and after bringing the summand inside theintegral the foregoing reads
E[BP ]λ1(1− z)ψ(z) = λ1(1− z)∫ ∞
0
P[BP > t]eλ1t(z−1)dt = 1− φ(λ1(1− z)),
where the last equality is obtained by partial integration. Hence we find that
ψ(z) =1− φ(λ1(1− z))E[BP ]λ1(1− z)
.
Thus, by independence of arrivals and because L1 at any point during a vacation is the sumof L1 at the start of the vacation plus the arrivals in the backward recurrence time up to thatpoint, we obtain the PGF of L1 during vacations:
E[zL1 | L0 > 0] =1− φ(λ1(1− z))E[BP ]λ1(1− z)
E[zL1 | L0 = 0].
Hence, because P[L0 > 0] = ρ0,
E[zL1 ] = ρ0(1 +1− φ(λ1(1− z))E[BP ]λ1(1− z)
)(1− ρ1)(z(µ+ λ0 − ν)− λ0φ(λ1)) + λ1 − µz(λ0 + λ1 + µ)− µ− z2λ1 − zλ0φ(λ1(1− z))
. (2)
A type-0 idle period lasts on average 1/λ0. Since type-0 busy periods and idle periods alter-
nate, 1/λ0
1λ0+E[BP ] and 1 − ρ0 are equivalent expressions for the fraction of idle time, such that
E[BP ] = ρ0/λ0
1−ρ0 . Lastly (see for example Adan & Resing (2002) for an elegant derivation)
φ(s) = (2λ0)−1(λ0 +µ+ s−√
(λ0 + µ+ s)2 − 4λ0µ), by which the equilibrium distribution of L1
is defined. Alternatively a computationally more efficient (when approximations suffice) recursiverelation for the γk can be derived, of which Sleptchenko et al. (2015) contains a detailed exhibit.
13

3.4 Exponential pollingWe have now considered two extremes, the FIFO model where we showed that a customer’s classeffectively means nothing and a priority model where classes are used as a strict total ordering. Inmany practices these models are inapplicable due to various limitations. Often there is a penaltyon switching the server between different queues, making the FIFO approach infeasible as itrequires unconstrained switching between queues. There may also be a maximum vacation timefor each non-empty queue, which cannot be modeled in a priority queueing system. The generalpolling system does allow to model these demands: in a polling system the server distributes itstime between the queues according to an arbitrary scheme, possibly depending on the time, thearrival time of customers or the queue that is being served. Note that both FIFO and prioritymodels are specific cases of polling systems. In this section we introduce exponential polling,which allows both control over the average switching frequency and the fraction of time spent oneach queue.
Equilibrium distributionsThe exponential polling scheme devotes some exponentially (with polling rate τ0) distributedperiod to queue 0 after which a τ1-exponentially distributed period is devoted to queue 1. Because
the fraction of time available to serve type-i customers reduces from 1 to 1/τi1/τ0+1/τ1
, the queue
length of class i is finite if ρi <1/τi
1/τ0+1/τ1. This system is suboptimal in the sense that it might
devote its capacity to type-1 customers at times when the type-1 queue is empty whilst the type-0queue is not. This polling scheme is independent from the queue length, time, and the arrival-and serving process, by the grace of which it is relatively easy to write down the possible statetransitions and their transition rates. We only have to consider whether or not a queue is beingpolled when we wish to write down the transition matrix for that queue. Each queue i thereforehas state process (Li, δi) where Li are the number of customers in the system of type i andthe indicator δi ∈ {0, 1} denotes whether queue i is being polled. Let us derive the equilibriumprobabilities for type-0 customers. The equilibrium probabilities for type-1 customers follow by asymmetry argument. For future reference, define
P[(L0, δ0) = (n, 1)] = πn, and P[(L0, δ0) = (n, 0)] = πn.
Of course, if a queue is not being polled, it can not reduce in size. Figure 3.4 contains a graphicoverview of the state transitions. Because of the exponential polling times, the exponential servicetimes and the Poisson arrivals the evolution of this process is Markovian, such that we may solvethe balance equations to find the equilibrium probabilities.
The red resp. green cut in Figure 3.4 yield for n > 0 the balance equations
λ0(πn + πn) = µπn+1 and (λ0 + τ0)πn + λ0πn−1 = µπn+1 + τ1πn.
We point out that the balance equation for π0 reads (λ+ τ1)π0 = τ0π0 and that queue 0 isbeing polled a fraction equal to τ1
τ0+τ1of the time2. First we rewrite the red cut balance equation
as πn+1 = ρ(πn + πn), and substitute this twice in the green cut balance equation:
(λ0 + τ0)πn + λ0πn−1 = µπn+1 + τ1πn = λ0(πn + πn) + τ1πn
τ0πn + λ0πn−1 = (λ0 + τ1)πn
τ0ρ(πn−1 + πn−1) + λ0πn−1 = (λ0 + τ1)πn
2One polling cycle spends on average 1/τi time on queue i.
14

Hence the balance equations describe the bivariate homogeneous recurrence relation[πnπn
]= An
[π0
π0
]= An
[1τ0
λ0+τ1
]π0, with A =
[ρ ρτ0ρ
λ0+τ1
λ0+τ0ρλ0+τ1
]where we must have
limn→∞
An = 0 ,
∞∑n=0
[πnπn
]=
[ τ1τ0+τ1τ0
τ0+τ1
]and π0 + π0 = π0
τ0 + τ1 + λ0
τ1 + λ0= 1− ρ,
which completely defines the individual equilibrium distribution of class 0 via the identityP[L0 = n] = πn + πn = ρ−1
0 πn+1 given by the balance equation at the red cut. The balanceequations of class 1 follow by symmetry.
Expected sojourn timeThe expected sojourn time is found as follows. An arriving type-0 customer observes E[L0]customers already queued who, including the arrival, require 1
µ (1 + E[L0]) service time. During
this period the server switches τ0µ (1 + E[L0]) times to serve type-1 customers, switching back
after on average 1τ1
. With probability τ0τ0+τ1
the server is at queue 1 upon the customers arrival,
from which it returns after 1τ1
. Setting τ = τ0 + τ1, altogether this yields
E[W0] =1
µ(1 + E[L0]) +
τ0µτ1
(1 + E[L0]) +τ0/τ1τ0 + τ1
so that E[W0] =τ/µ+ τ0/τ
τ1 − ρ0τ
with a symmetrical expression for E[W1], and by using L = L0 + L1 and two applications ofLittle’s law
E[W ] =λ1
λ
τ/µ+ τ1/τ
τ0 − ρ1τ+λ0
λ
τ/µ+ τ0/τ
τ1 − ρ0τ.
0, 1 . . . n− 1, 1 n, 1 n+ 1, 1 . . .
0, 0 . . . n− 1, 0 n, 0 n+ 1, 0 . . .
τ0τ1 τ0τ1 τ0τ1 τ0τ1 τ0τ1
λ0
µ
λ0
µ
λ0
µ
λ0
µ
λ0
µ
λ0 λ0 λ0 λ0 λ0
Figure 3.4 State transitions in the exponential polling model for queue 0. Each node corresponds to astate (L0, δ0) as defined above.
15

4 The green waveConsider a network of intersections as depicted in Figure 4.1. We shall study a traffic flow 0passing through n intersections without interruption, where at each intersection another flow oftraffic competes for service time. Throughout this chapter we will distinguish between ‘greenwave’ type-0 customers and ‘cross traffic’ type-k customers, where, unless otherwise stated, itmay be assumed that k > 0. Let us assume that the time required by type-0 customers fromexiting intersection k − 1 to arriving at intersection k is fixed for each k, and that the servicetime at each subsequent server is determined by and equal to the first service time. Since thearrival- and departure times are independent of time, without any more loss of generality wecan now assume that a type-0 customer passes all servers at the same time and that all type-kcustomers experience exactly the same interruption in their service whenever a type-0 customeris served. Furthermore, let the interarrival and service times be exponentially distributed. Wealso once more assume that the service time is the same for each queue. We will develop differentmethods to divide service time amongst type-0 customers and other-type customers and study theimplications on the mean time spent in the system for each type and for the system as a whole.
0(λ0) X1 X2 X3 Xn
1(λ1) 2(λ2) 3(λ3) n(λn)
Figure 4.1 The elementary network model. Type-0 customers must pass intersections X1, . . . , Xn
where they must compete with type-k customers over server Xk.
4.1 Priority queueing: green wave first
Expected sojourn timeIf we prioritize type-0 customers and we assume preemption then no time is needed to clear theservers before a type-0 customer arriving at an empty type-0 queue can be served. Prioritizationof type-0 customers thus works the same as in single queue M/M/1 models, where for each k > 0the queue formed by adding type-0 and type-k customers is again a regular M/M/1-queue. Thislatter queue is indexed by the subscript {0, k}. Hence we find
E[W0] =1
µ− λ0, E[Wk] =
E[L{0,k}]− E[L0]
λk=
µ
(µ− λ0 − λk)(µ− λ0).
Since E[L] =∑nk=1 E[Lk], two applications of Little’s law and setting λ =
∑nk=0 λk gives us
E[W ] = λ−1n∑k=0
λkE[Wk].
16

Equilibrium distributionsSince the type-0 customers observe a regular M/M/1 queue, the equilibrium distribution of L0
is given by P[L0 = n] = ρn0 (1 − ρ0). Each type-k customer observes the same system as thetype-1 customer in the single-server priority system presented in 3.3, such that the equilibriumdistribution of Lk may be derived from (2):
E[zLk ] = (ρ0 +(1− ρ0)(1− φ(λk(1− z)))
λ0λk(1− z))
(1− ρ1)(z(µ+ λ0 − ν)− λ0φ(λ1)) + λ1 − µz(λ0 + λk + µ)− µ− z2λk − zλ0φ(λk(1− z))
where φ(s) is, as before, given by φ(s) = (2λ0)−1(λ0 + µ+ s−√
(λ0 + µ+ s)2 − 4λ0µ).
4.2 Priority queueing: green wave lastIf the type-0 customers are given the lower priority, the type-k customers observe a regular queuewith the by now common expressions for the equilibrium distribution and expected sojourn time.For type-0 customers, consider the following.
The system cycles through two periods: either one or more type-k customers are being servedor no type-k customers are being served. During the former period (the Joint Busy Period withlength JBT ) the type-0 queue sees only arrivals whilst during the latter (the Joint Idle Periodwith length JIP ), type-0 customers can also be served.
Equilibrium distributionThe type-0 queue length is itself not a Markov chain because it depends on the state of theother queues. The smallest continuous-time Markov chain describing L0 therefore has state spaceNn+1, rendering a derivation of the equilibrium distribution via solving the balance equationsvirtually impossible. Alternatively we may embed a Markov chain at the transition momentsof L during the joint idle periods much like our work in section 3.3, but this method requiresthe distribution of JBP . Note that at the start of a joint busy period only a single queue is inuse and there is no limit to the number of individual busy periods during a a JBP , such thatJBP is not related to the maximum of all busy periods, or any comparable quantity. Moreoverwhen one busy period ends, the probability that other busy periods have ended depend on thelength of the busy period that just finished. This dependence makes the distribution of JBP farfrom trivial1. This problems is also closely related to determining the return time to the origin ofn-dimensional random walks in the positive orthant. However, using an indirect argument it ispossible to derive the expectation of JBP .
Expected sojourn timeWe find that the fraction of time that the system is in a joint idle period equals the fraction oftime that all type-k queues are idle:
γ :=E[JIP ]
E[JIP ] + E[JBP ]=
n∏k=1
(1− ρk).
Furthermore, the joint idle period finishes upon the first non-type-0 arrival. By memorylessness thetime until the first type-k arrival after the start of a joint idle period is exponentially distributedwith rate λk, and since the minimum of exponentially distributed stochastics is exponentiallydistributed with the sum of the individual rates as its rate, defining λ0 =
∑nk=1 λk we find
E[JIP ] =1
λ0
and E[JBP ] =1− γγλ0
.
1By the knowledge of the author, determining the distribution of JBP remains an open problem to date.
17

An arriving type-0 customer will find E[L0] type-0 customers already queued, such that he leavesagain after E[L0] + 1 services of length 1/µ. During this time, joint busy periods start at a rateλ0 each of which lasts E[JBP ]. Moreover, the arriving customer may find the system to be ina joint busy period upon arrival with probability 1 − γ such that he must wait the remainingduration of the joint busy period E[RJBP ]. Unfortunately, an expression for E[RJBP ] eludes theauthor. Yet, putting everything together using (3.2) and Little’s law:
E[W0] =1
µ(E[L0] + 1)(1 + λ0E[JBP ]) + (1− γ)
E[JBP 2]
2E[JBP ]=
(µγ)−1 + γλ0E[JBP 2]/2
1− ρ0/γ.
For stability we thus require that the fraction of time available for serving is greater than thefraction of time that the system isn’t idle, that is :γ > ρ0. Via the inequalities 0 ≤ E[RJBP ] ≤E[JBP ] a somewhat loose bound is obtained on E[W0]:
1µ
γ − ρ≤ E[W0] ≤
1µ + (1−γ)2
λ0
γ − ρ
4.3 Exponential polling
Expected sojourn timeSuppose we let the server switch from serving type-0 customers to serving type-k customers andback after exponential times τ0 resp. τ1. The theory from section 3.4 can be reapplied since theswitching happens independently from server occupation, yielding
E[W0] =τ/µ+ 1− τ1/τ
τ1 − ρ0τ, E[Wk] =
τ/µ+ 1− τ0/ττ0 − ρkτ
, E[W ] = λ−1n∑k=0
τρk + λk − λkτδ0k/ττδ0k − ρkτ
where δjk is used as the kronecker delta. Moreover, for stability we require τ1/τ > ρ0 andτ0/τ > ρk. If we let τ0 = ατ for some fixed α ∈ (maxk>0 ρk, 1− ρ0), then the previous expressionreads as E[Wk] = 1
αµ−λk+ τ−1 1−α
α−ρk , which shows that increasing the total cycle rate τ decreasesthe waiting time for each queue. If we let τ approach infinity, the queues even become unaware ofeach others presence in terms of expected sojourn time, but instead observe a server that operatesat rate αµ. Rewriting the expression as E[Wk] = 1
α−ρkτ+µ−λk
µτ − τ−1 on the other hand shows us
that for fixed τ , E[Wk] grows hyperbolically as the server shifts its attention more often to queue0. The mirrored results follow for queue 0 by symmetry.
Equilibrium distributionThe equilibrium distributions for type 0 are given by
πn,0 = ρn0 (1− ρ0)τ1 + λ0
τ + λ0
[1 1
] [ 1 1τ0
λ0+τ1
µ+τ0λ0+τ1
]n [1τ0
λ0+τ1
]and for type k by
πn,k = ρnk (1− ρk)τ0 + λkτ + λk
[1 1
] [ 1 1τ1
λk+τ0
µ+τ1λk+τ0
]n [1τ1
λk+τ0
].
Again we write τ0 = ατ and let τ approach infinity. This time the matrix expression for πn,kcollapses into the familiar expression πn,k = αnρnk (1 − αρk), such that the queue length evenconverges in distribution to a regular M/M/1 queue with serving rate αµ.
18

5 SimulationsIn this section we will review via simulations the effect on the performance measures of a numberof assumptions that were made. In particular, we will study the network model with high andlow priority for the green wave and with exponential polling. Since the indices are of inferiorimporance in this chapter, we will refer to the type-0 customers as green wave customers and to thetype-k customers as cross queue customers. Models with low and high saturation are simulated,where saturation is measured as the green-wave arrival rate plus the greatest cross-queue arrivalarrival rate as a ratio of the departure rate. Saturation thus coincides with the average occupationρ of the M/M/1 queue comprised of the green wave and the busiest cross queue. For a givensaturation, the simulated models are either ‘heavy green wave’, ‘balanced’ or ‘heavy cross queue’.In heavy green wave models the bulk of the arrivals are green wave customers, and so forth.
5.1 influence of assumptionsThe simulations were run for a period of 20,000 time units with arrival rates between .5 and 6such that the number of arrivals ranged from approximately 10,000 to 120,000 per queue.
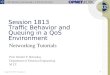
Figure 5.1 Simulations of different queueing disciplines in the saturated, heavy cross queue systemsetup. The exponential polling model switches service to the green wave at rate 3 and switches serviceto the crossing queues at rate 7.
PreemptionTo study the effect of preemption on the queue length distribution and expected sojourn time,a queueing network is simulated with Poisson arrivals and exponential departures according tothe proposed network queueing schedules both with and without preemptive-resume. Instanceswere considered with low (20%) or high (80%) saturation. Both instances were considered with arelatively high load for either cross-queues or the green wave, as well as a balanced load.
19

Instances with a low saturation showed insignificant differences between models with andwithout preemption. In the balanced model and the model with a high load green-wave arrivals,notable differences in expected sojourn time and queue length distribution are present for the greenwave between models with and without preemption, but the differences are again insignificant forthe cross-queues.
In the saturated model with high-load cross queues large differences are found in expectedsojourn time and queue length distribution, where the effect is proportionally larger for crossqueues with a lower arrival rate. The queue lengths are reported in Figure 5.1 and the meansojourn time and total queue size per queue and queueing discipline are reported in Table 5.1.
CQ 1 (1.5) CQ 2 (3) CQ 3 (6) GW (2)
exponential polling with preemption 0.234 0.328 1.28 1.73exponential polling without preemption 0.183 0.253 0.913 1.07prioritized cross queues with preemption 0.118 0.142 0.252 6.28prioritized cross queues without preemption 0.191 0.212 0.289 1.48prioritized green wave with preemption 0.19 0.249 0.616 0.125prioritized green wave without preemption 0.211 0.267 0.692 0.222
Table 5.1 Mean sojourn time and number of arrivals per queue (CQ for crossing queue and GW forgreen wave) and per queueing discipline in the saturated, heavy cross queue system setup.
The difference in sojourn time is in each instance the largest for the green wave. In theexponential polling model, the green wave is confronted with a higher frequency of residual servicetime for a cross queue upon a switch than vice versa due to the higher greatest arrival rate of thecross queue.
If the green wave is prioritized, non-preemption influences the green wave by adding residualservice of the cross queues to the waiting time. Meanwhile the effect of preemption on crossqueues is more indirect: By the PASTA property the average number of queued cross queuecustomers at the start of a green wave busy period is the same with or without preemption.However, at the start of the green wave busy period the green wave queue has length 1 withpreemption but is longer without preemption. Consequently, without preemption the green wavesojourn time is higher and the green wave busy period is longer, also causing a higher sojourntime for the cross queues.
When cross queues are prioritized, the increase on waiting time without preemption is onlymarginal for cross queues because the low arrival rate for green wave customers implies that theprobability that the first cross queue arrival after a cross queue idle period finds a green wavecustomer in service is low. The green wave customers meanwhile find their sojourn time quarteredbecause with preemption they were interrupted with high probability, given the high arrival rateof the crossing queues.
Exponential serving timesTo test the effect of the choice of serving process, the analysis for preemption is repeated witha different feasible serving process: a deterministic departure time. Again the low-saturationsystem is insensible to modeling choices, having more or less the same distribution and sojourntime regardless of departure process, load distribution and preemptiveness. The simulation resultsfor the saturated system with balanced green wave arrival rate and cross queue arrival rate aredepicted in Figure 5.2 and Table 5.2.
When exponential polling and preemption is used, it is apparent that the stability conditionalone does not to tell the whole story. The number of customers that get serviced during a pollingperiod decreases hyperbolically with the polling rate. Unlike with exponential services, with
20

Figure 5.2 Simulations of different queueing disciplines in the saturated, balanced system setup. Theexponential polling model switches service between the green wave and cross queues at rate 5.
CQ 1 (1) CQ 2 (2) CQ 3 (4) GW (4)
exponential polling with preemption 0.474 0.686 307 413exponential polling without preemption 0.231 0.29 0.645 1.05prioritized cross queues with preemption 0.105 0.113 0.133 2497.76prioritized cross queues without preemption 0.134 0.139 0.152 0.769prioritized green wave with preemption 0.318 0.413 1.2 0.134prioritized green wave without preemption 0.217 0.259 0.475 0.176
Table 5.2 Mean sojourn time and number of arrivals per queue (CQ for crossing queue and GW forgreen wave) and per queueing discipline in the saturated, balanced system setup.
deterministic services no customers are served if the server switches after a period that is shorterthan the expected service time. The fraction of polling cycles of type k with rate τk that lastshorter than the service time 1/µ is given by 1− eτk/µ, hence as the polling rates increase thisfraction approaches 1 and each service is preempted before it is finished.
Also in the high-saturation system with preemption, the green wave has an unstable queuelength distribution regardless of load balance when the cross queues are prioritized. The reasoningbehind this is similar to that of the exponential polling: The fraction of cross queue idle periodswhich last shorter than 1/µ is given by 1− e
∑nk=1 λk/µ, such that again the fraction of preempted
green wave services quickly increases as the number of cross queues and/or their service ratesincrease.
21

6 DiscussionIn this paper we have modeled traffic flow networks under the assumption that each bottlenecksees Poisson arrivals and that queues have unlimited capacity. Burke’s theorem indeed states thatin networks of intersections with unlimited queues, exponential service and serving disciplineswhich act as if there is only a single queue at each intersection, all intersections actually see Poissonarrivals. A more general version of Burke’s theorem however has not been proven. Moreover, thequeues between subsequent bottlenecks have a finite capacity such that the arrival process ofsubsequent bottlenecks deviates more from Poisson arrivals as the occupation rate of the previousbottleneck approaches 1, since this in general leads to queues hitting their capacity limit morefrequently. An investigation on the validity of Poisson arrivals in a more general setting as well asa review of the effect of the Poisson arrivals-assumption provides an interesting topic for futureresearch.
One distinct advantage of the microscopic traffic flow model over the queueing networkmodel is that the former can elicit emergent behavior - that is, typical patterns that are clearlyobservable on an aggregate scale, but which are very hard to relate to decisions of individualtraffic participants. Incorporating emergent behavior in the queueing network model mightlead to interesting new insights. One method we would like to suggest for future research is byincorporating a parametrized estimation of empirical arrival processes in queueing networks withgeneral arrival processes.
The concepts from this paper also lend themselves for an interesting marriage with gametheory: If the traffic participants are aware of the design of a queueing network, they can altertheir route to minimize their sojourn time. This sentience should be taken into account whenthe optimal network design is sought. This requires determining the Nash equilibria, a game-theoretical concept that depicts systems in which each participant cannot further improve his orher situation by altering their route.
22

7 Populaire samenvattingBeleidsmakers hebben tal van ontwerpkeuzes te maken bij de aanleg van nieuwe wegen enkruisingen, en bij deze keuzes moeten ze rekening houden met de wensen van de weggebruikers,milieugroeperingen, de bewoners, enzovoorts. Om zo goed mogelijk aan ieders wens te voldoen ishet belangrijk om te weten wat de gevolgen zijn van alle ontwerpkeuzes. Er zijn verschillendesoorten modellen beschikbaar om deze gevolgen te onderzoeken. Een belangrijke klasse modellengebruikt wachtrijtheorie. Deze modellen delen een wegennetwerk op in bottlenecks en vervolgensmodelleren ze zo’n bottleneck door iedereen die er voorbij wil aan te laten sluiten in een wachtrijen ze er een vooreen langs te laten. Door een aantal aannames te maken over hoe weggebruikersaankomen bij de bottleneck en hoe ze vervolgens langs de bottleneck kunnen komen lukt het omde verdeling te vinden van de lengte van de wachtrij en de verwachtte tijd die een weggebruikernodig heeft om langs de wachtrij en de bottleneck te komen. We bekijken twee soorten bottlenecksin detail:
KRUISINGEN •De eerste is een kruising van een aantal verkeersstromen. Voor drie verschillendevoorrangsgregels kunnen we per verkeersstroom de verwachte wachttijd en de verdeling van dewachtrijlengte bepalen. Deze regels zijn:First In First Out Hier maakt het niet uit vanaf welke kant je komt aanrijden, er is maar een
wachtrij waar iedereen achteraan aansluit.Priority polling Hier moet elke verkeersstroom wachten tot er niemand van een hogere prioriteit
de kruising wil oversteken. Vervolgens mogen ze vrij oversteken tot er weer iemand vaneen hogere prioriteit aankomt. Voor elke verkeersstroom geldt dat de wachtrij verkregendoor zijn wachtrij met de hogere-prioriteits wachtrijen samen te nemen zich gedraagt alseen enkele wachtrij.
Exponential polling Bij exponential polling mogen de verschillende verkeersstromen afwisselendoversteken. De tijd die elke verkeersstroom achter elkaar krijgt is onafhankelijk van de lengtevan de wachtrijen. Elke wachtrij heeft dus te maken met onafhankelijke onderbrekingenwaarin die rij niet mag oversteken.
Bij de laatste twee regels moet er onderscheid gemaakt worden tussen nonpreemption en preemptive-resume. In het eerste geval mag iedereen die al begonnen is om de kruising over te stekengegarandeerd de hele kruising over steken, ook als het halverwege het oversteken eigenlijk tijd isom een andere verkeersstroom over te laten steken. In het tweede geval wordt de beurt van depersoon die aan het oversteken is onderbroken, en mag hij verder gaan waar hij gebleven waszodra zijn verkeersstroom weer aan de beurt is.
GROENE GOLVEN •De tweede bottleneck is een keten van kruisingen, waarbij er verkeersstromenzijn die de keten dwars over steken en er een enkele verkeersstroom is die langs alle kruisingen inde keten gaat. Bovendien hoeft deze ene ‘groene golf’ verkeersstroom alleen bij de eerste kruisingte wachten, daarna mogen ze vrij doorrijden. Voor de groene golf-bottleneck bekijken we tweevoorrangsregels:Priority polling Ditmaal moeten we een verschil maken tussen voorrang voor de groene golf of
voorrang voor de kruisstromen. In het eerste geval gedraagt elke kruisstroom zich samenmet de groene golf alsof ze samen een enkele kruising zijn met priority polling. Als dekruisstromen voorrang hebben dan gedragen de kruisstromen zich als afzonderlijke enkelekruisingen met maar 1 verkeersstroom, maar het gedrag van de groene golf wordt nu ergcomplex.
23

Exponential polling Elke kruisstroom gedraagt zich nu samen met de groene golf net zo alsexponential polling in de enkele kruising.
Bij nonpreemption moet er nu ook rekening mee gehouden worden dat er meerdere personen nogaan het oversteken kunnen zijn als de beurt wisselt van de kruisstromen naar de groene golf.
Tijdens het modelleren worden een aantal aannames gemaakt. Simulaties laten zien dat hetwel of niet gebruiken van preemptive-resume en de verdeling van de tijd die nodig is om dekruising over te steken los van elkaar geen grote invloed hebben op de verwachte wachttijd en deverdeling van de wachtrijlengte. Als ze samen worden bekeken dan kunnen ze wel een erg groteinvloed hebben.
24

BibliographyAdan, I. & Resing, J. (2002), Queueing Theory, Eindhoven University of Technology.
Boucherie, R. J. & van Dijk, N. M. (1997), ‘On the arrival theorem for product form queueingnetworks with blocking’, Performance Evaluation 29(3), 155 – 176.URL: http://www.sciencedirect.com/science/article/pii/S0166531696000454
Burke, P. J. (1956), ‘The output of a queuing system’, Operations Research 4(6), 699–704.URL: http://dx.doi.org/10.1287/opre.4.6.699
Chandy, K. M. (1972), ‘Analysis and solutions for general queueing networks’.
Dargay, J., Gately, D. & Sommer, M. (2007), ‘Vehicle ownership and income growth, worldwide:1960-2030.(industry overview).’, The Energy Journal. International Association for EnergyEconomics .URL: https://www.highbeam.com/doc/1G1-170157307.html
Gan, Q., Sun, J., Jin, W. & Saphores, J.-D. (2011), Incorporating Vehicular Emissions into anEfficient Mesoscopic Traffic Model: An Application to the Alameda Corridor, CA, Universityof California Transportation Center, Working Papers qt2w12n0c6, University of CaliforniaTransportation Center.URL: https://ideas.repec.org/p/cdl/uctcwp/qt2w12n0c6.html
Jabari, S. E. (2016), ‘Node modeling for congested urban road networks’, Transportation ResearchPart B Methodological .URL: http://dx.doi.org/10.1016/j.trb.2016.06.001
Jabari, S. E. & Liu, H. X. (2012), ‘A stochastic model of traffic flow: Theoretical foundations’,Transportation Research Part B: Methodological 46(1), 156 – 174.URL: http://www.sciencedirect.com/science/article/pii/S0191261511001354
Jain, R. & Smith, J. M. (1997), ‘Modeling vehicular traffic flow using m/g/c/c state dependentqueueing models’, Transportation Science 31(4), 324–336.URL: http://dx.doi.org/10.1287/trsc.31.4.324
Jha, M., Gopalan, G., Garms, A., Mahanti, B., Toledo, T. & Ben-Akiva, M. (2004), ‘Developmentand calibration of a large-scale microscopic traffic simulation model’, Transportation ResearchRecord: Journal of the Transportation Research Board 1876(-1), 121–131.
Ji, Y. & Geroliminis, N. (2012), ‘On the spatial partitioning of urban transportation networks’,Transportation Research Part B: Methodological 46(10), 1639 – 1656.URL: http://www.sciencedirect.com/science/article/pii/S0191261512001099
Jin, w.-l. (2013), ‘A link queue model of network traffic flow’.URL: http://arxiv.org/pdf/1209.2361
25

Kendall, D. G. (1953), ‘Stochastic processes occurring in the theory of queues and their analysisby the method of the imbedded markov chain’, Ann. Math. Statist. 24(3), 338–354.URL: http://dx.doi.org/10.1214/aoms/1177728975
Kerner, B. S. (2004), The physics of traffic, 1 edn, Springer-Verlag Berlin Heidelberg.URL: http://doi.org/10.1007/978-3-540-40986-1
Kerner, B. S. & Klenov, S. L. (2006), ‘Deterministic microscopic three-phase traffic flow models’,Journal of Physics A: Mathematical and General 39(8), 1775.URL: http://stacks.iop.org/0305-4470/39/i=8/a=002
Little, J. D. C. (1961), ‘A proof for the queuing formula: L = λw’, Operations Research 9(3), 383–387.URL: http://dx.doi.org/10.1287/opre.9.3.383
Norris, J. (1998), Markov Chains, University of Cambridge.
Nunez Queija, R. (2000), ‘Sojourn Times In A Processor Sharing Queue With Service Interrup-tions’, Queueing Systems 34(1-4), 351 – 386.URL: http://oai.cwi.nl/oai/asset/2087/2087A.pdf
Ross, S. M. (2010a), {CHAPTER} 4 - markov chains, in S. M. Ross, ed., ‘Introduction toProbability Models (Tenth Edition)’, tenth edition edn, Academic Press, Boston, pp. 191 – 290.URL: http://www.sciencedirect.com/science/article/pii/B9780123756862000091
Ross, S. M. (2010b), {CHAPTER} 6 - continuous-time markov chains, in S. M. Ross, ed.,‘Introduction to Probability Models (Tenth Edition)’, tenth edition edn, Academic Press,Boston, pp. 371 – 419.URL: http://www.sciencedirect.com/science/article/pii/B9780123756862000054
Sleptchenko, A., Selen, J., Adan, I. & van Houtum, G.-J. (2015), ‘Joint queue length distributionof multi-class, single-server queues with preemptive priorities’, Queueing Systems 81(4), 379–395.URL: http://dx.doi.org/10.1007/s11134-015-9460-z
United States Census Bureau (2016), ‘Total midyear population for the world: 1950-2050’.URL: http://www.census.gov/population/international/data/worldpop/table%5Fpopulation.php
Van Woensel, T. & Vandaele, N. (2007), ‘Modeling traffic flows with queueing models: A review’,Asia-Pacific Journal of Operational Research 24(04), 435–461.URL: http://www.worldscientific.com/doi/abs/10.1142/S0217595907001383
Wolff, R. W. (1982), ‘Poisson arrivals see time averages’, Operations Research 30(2), 223–231.URL: http://dx.doi.org/10.1287/opre.30.2.223
26