Embed Size (px)
Citation preview
Mentor: prof. dr. Slobodan N. 9XNRVDYLü
Student: 0LOHQNR�-RYDQRYLü 410/96 EG-EPP
Beograd, novembar 2003.

1
6$ä(7$.
Ovaj diplomski rad je pokušaj da se ukratko isprati nastanak, istorijski
razvitak i trenutna pozicija SR motora u svetu elektromotornih pogona.
Objašnjeni su princip rada i algoritmi za upravljanje SR motorom. U
okviru algoritama za upravljanje� QDSUDYOMHQ�MH�SUHJOHG�SUHWYDUDþD�NRML�VX�do sada razvijeni i specijalizovani posebno za ovu vrstu elektromotora.
.DR� MHGDQ� YLG� YHULILNDFLMH� VYHJD� UHþHQRJ�� SULORåHQD� MH� L� VLPXODFLMD� 65�motora, koja generiše pretpostavljene talasne oblike struje, induktivnosti i
momenta.
2
1. Uvod
Prvi 35(.,'$ý.,� 5(/8.7$171,� 02725 (Switched reluctance motor, u daljem
tekstu SR motor) je konstruisao i napravio Davidson u Škotskoj, davne 1838, [11]. Davidson
MH� SRPRüX� WRJ� PRWRUD� SRNUHWDR� ORNRPRWLYX�� Ovako rani pronalazaN 65� PRWRUD� VH� PRåH�REMDVQLWL�YHRPD�MHGQRVWDYQRP�NRQVWUXNFLMRP�L�SULQFLSRP�UDGD��0H XWLP��65�PRWRU�VH�QHüH�koristiti više od jednog veka zbog nedovoljno razvijenih elektronskih komponenti koje se
koriste za upravljanje.
Godine 1920. je patentLUDQ� PRWRU� NRML� LPD� PQRJH� ]DMHGQLþNH� NDUDNWHULVWLNH� VD� 65�PRWRURP��SURPHQOMLYL�UHOXNWDQWQL�NRUDþNL�PRWRU��9DULDEOH�UHOXFWDQFH�stepper motor).
âHVGHVHWLK� JRGLQD� ���� YHND� SURI�� ,OLMD� 2EUDGRYLü� VNUHüH� ]QDþDMQLMX� SDåQMX� VWUXþQH�MDYQRVWL�QD�PRJXüQRVWL�NRMH�SUXåa SR motor. 8EU]R�VH�SRMDYOMXMH�YHOLNL�EURM� LVWUDåLYDþD�NRML�NDR� SUHGPHW� LVWUDåLYDQMD� LPDMX� XSUDYR� RYDM� PRWRU�� 0H X QMLPD� VH� LVWLþX� VOHGHüL�� 3�� -��Lawerson, [2], [3], J. M. Stephenson, [3]-[5], J. ýorda, [3]-[6], H. Baush, [7], [8], J. V. Byrne,
[9] i dr. Najzad, ������ JRGLQH� QDXþQLFL� %HGIRUG� L� +RIt patentiraju moderan SUHNLGDþNL�reluktantni motor i razvijaju� ORJLNX�NRMD�REH]EH XMH� MHGQRVWDYQR� L� VLJXUQR�XSUDYOMDQMH� LVWLP,
[11].
Firma, Hewlett Packard je prva upotrebila ovaj motor u serijskoj proizvodnji za svoj
'UDIW0DVWHU�SORWHU��'DQDV�SRVWRML�PQRJR�SURL]YR DþD�NRML� VD�XVSHKRP�koriste SR motor u
svojim aplikacijama.
3RVWRML�YLãH�UD]ORJD�]ERJ�NRMLK�MH�65�PRWRU�NRQNXUHQWDQ�X�VYH�YHüHP�EURMX�SULPHQD,
[1]. 3UH� VYHJD�� QMHJRYD� QDMYHüD� SUHGQRVW� MH� X� YHRPD� MHGQRVtavnoj konstrukciji sa rotorom
bez namotaja ili permanentnih magneta. Ovakva konstrukcija, pored uštede u ceni,
RPRJXüXMH� GD� PRWRU� UDGL� X� ãLURNRP� WHPSHUDWXUQRP� RSVHJX� EH]� GHJUDGDFLMH� X�performansama. Za pokretanje SR motora koristi se elektronski komutator, a ne meKDQLþNL VD� þHWNLFDPD�� WDNR� GD� MH� RGUåDYDQMH� YHRPD� MHGQRVWDYQR��Pogoni sa ovim motorom imaju
YHRPD�YLVRN�VWHSHQ�HILNDVQRVWL�L�PRWRUD�L�SUHWYDUDþD��D�VDP�65�PRWRU�LPD�YHOLNX�VSHFLILþQX�izlaznu snagu u odnosu na masu i zapreminu. 65�PRWRU�PRåH�GD� UDGi u širokom opsegu
EU]LQH��JGH�SRVHEQX�SRJRGQRVW�SUHGVWDYOMD�PRJXüQRVW�UDGD�VD�EU]LQDPD�i do 6-� SXWD�YHüLP�RG�QRPLQDOQH��9LVRN�VWDUWQL�PRPHQW��NDR�L�YHOLNL�RGQRV�PRPHQW�LQHUFLMD�RPRJXüDYDMX�GREUR�ubrzanje i dobru karakteristiku pri "reversu". Radne karakteristike motora se lako
SURJUDPLUDMX� L� PRJXüH� MH� REH]EHGLWL� YLVRN� VWHSHQ� WROHUDQFLMH� QD� SRJUHãQD� VWDQMD� Pored
prednosti samog motora i regulator koji se koristi za njegovo kontrolisanje je jednostavniji, sa

3
PDQMLP� LOL� LVWLP� EURMHP� SROXSURYRGQLþNLK� SUHNLGDþD� X� RGQRVX� QD� UHJXODWRU� X� SRJRQX� VD�QDL]PHQLþQLP�PRWRURP��VD�LVWLP�EURMHP�ID]D� 8 MHGQRM�UHþHQLFL�65�PRWRU�VH�PRåH�RSLVDWL�NDR�HNRQRPLþQD��UREXVQD�PDãLQD��MHGQRVWDYQD�za izradu.
Prednosti SR motora su definisale i oblasti njegove primene, a to su:
industrijske aplikacije koje zahtevaju kontrolu brzine i pozicioniranje sa funkcijama
kao što su start, stop, menjanje smera, blokiranje i sl.
X DXWRPRELOVNRM� LQGXVWULML�� JGH� VH� MDYOMD� SRWUHED� ]D� HOHNWULþQLP� PRWRULPD� NRML� QLVX�SRGORåQL�NYDURYLPD� X GRPDüLQVWYLPa zbog potrebe za pogonom kod koga� MH�PRJXüH� UHJXOLVDWL� EU]LQX� L�REH]EHGLWL� VHUYR� NUHWDQMH� �QSU�� X� YHã�PDãLQDPD�� XVLVLYDþLPD�� IULåLGHULPD�� WRSORWQLP�pumpama, fenovima, procesorima hrane),
u robotici, gde pogon sa SR motorom nudi preciznu kontrolu kretanja pri visokom
momentu i maloj brzini eliminiãXüL prenosnike,
X PDãLQVNLP� DODWLPD� �]ERJ� PRJXüQRVWL� SRVWL]DQMD� YLVRNLK� EU]LQD� L� PRJXüQRVWL�regulacije brzine),
u tekstilnoj industriji (potrebna promenljiva brzina i servo kretanje),
u avionskoj industriji, gde dROD]H�GR�L]UDåDMD�VPDQMHQH�GLPHQ]LMH�SRJRQD��PRJXüQRVW�SRVWL]DQMD�YHOLNLK�EU]LQD��QHSRVWRMDQMH�PDJQHWD��PRJXüQRVW�UDGD�SUL�YLVRNLP�L�QLVNLP�temperaturama i sl.
X HOHNWURQVNLP� XUH DMLPD� �SRJRQ� IORSL� L� KDUG� GLVND�� SRJRQ� ODVHUVNRJ� GLVND� X�ãWDPSDþLPD��NRSLU�DSaratima i faks mašinama itd.).
3RUHG�QL]D�GREULK�RVRELQD��65�PRWRU�LPD�L�QL]�QHJDWLYQLK�RVRELQD�NRMH�RJUDQLþDYDMX�njegovu širu primenu. Osnovni nedostaci su:
QHPRJXüQRVW�UDGD�GLUHNWQR�L]�QDL]PHQLþQH�PUHåH��YHü�MH�QHRSKRGQD�XSRWUHED�QHNH�YUVWH�SUHWYDUDþD i kontrolera
veliki nivo buke proporcionalan brzini obrtanja,
relativno velika talasnost momenta,
zavisnost moment - brzina je jako nelinearna,
potreban je jako mali vazdušni procep radi postizanja visokog odnosa momenta i
zapremine,
neophodna je informacLMD�R�SRORåDMX�URWRUD�]D�RVWYDULYDQMH�NRPXWDFLMH�

4
8SUDYR� RYL� QHGRVWDFL� 65� PRWRUD� SUHGVWDYOMDMX� RVQRYX� ]D� GDOMD� LVWUDåLYDQMD� L�nadmudrivanje sa prirodom�X WHåQML�GD�VH�QHGRVWDFL�SUHWYRUH�X�SUHGQRVWL��1RYH�LGHMH�L�QDþLQL�upravljanja i eksploatacije SR motorD WHN�þHNDMX�GD�EXGX�RWNULYHQL��2YDM� UDG�GDMH�VNURPDQ�GRSULQRV�X�SUHJOHGX�GRVDGDãQMLK�VWDQMD�L]�REODVWL�XSUDYOMDQMD�65�PRWRURP�L�NDR�WDNDY�PRåH�SRVOXåLWL�EXGXüLP�LVWUDåLYDþLPD�NDR�MHGQD�RG�LQVSLUDFLMD�za dalji rad.
Sastavni deo ovog rada je i simulacija rada SR motora� XUD HQD� X� SURJUDPVNRP�paketu Matlab/Simulink v6.5.

5
2. Osobine SR motora
3UHNLGDþNL� UHOXNWDQWQL�PRWRU�� NDNR�PX� VDPR� LPH� NDåH�� VSDGD� X� JUXSX� UHOXNWDQWQLK�motora. 3RSXW�RVWDOLK�HOHNWULþQLK�PRWRUD�L�UHOXNWDQWQL�VH�VDVWRMH�L]�GYD�GHOD��SRNUHWnog (rotor)
L QHSRNUHWQRJ��VWDWRU���QD�NRPH�VH�QDOD]H�SREXGQL�QDPRWDML��6SHFLILþQRVW�UHOXNWDQWQLK�PRWRUD�MH� X� YHRPD� L]UDåHQLP� SRORYLPD� URWRUD� L� VWDWRUD�� WDNR� GD� dolazi do velikih oscilacija
induktivnosti po fazama prilikom obrtanja pokretnog dela, rotora. 8SUDYR�RYD�VSHFLILþQRVW� L�GHILQLãH�VWYDUDQMH�PRPHQWD�QD�YUDWLOX�65�PRWRUD�NDR�WHåQMX�GD�VH�URWRU�SRVWDYL�X�SRORåDM��X�RGQRVX� QD� VWDWRU�� WDNDY� GD� LQGXNWLYQRVW� X� SREX HQRM� ID]L� EXGH�PDNVLPDOQD� Kretanje koje
QDVWDQH�SRG�XWLFDMHP�RYDNYRJ�PRPHQWD�PRåH�ELWL�ELOo rotaciono, bilo translatorno.
âWR�VH�WLþH�NRQVWUXNFLMH�65�PRWRUD��YHü�MH�QDJODšeno da rotor i stator imaju istaknute
polove� 3REXGD� VH� QDOD]L� QD� VWDWRUX� X� YLGX� NRQFHQWULþQR� QDPRWDQLK� QDYRMDND� RNR� SRORYD
(slika 2.1)� 1DPRW�VH�RELþQR� IRUPLUD� L]� YLãH�HOHNWULþQR�RGYRMHQLK�NROD�� ID]D��)D]H�VH�PRJX�SREX LYDWL� RGYRMHQR� LOL� ]DMHGQR�� 8NROLNR� VH� åHOL� SRVWLüL� PRWRUQL� UHåLP� UDGD� VYDND� ID]D� VH�SREX XMH� NDGD� QMHQD� LQGXNWLYQRVW� UDVWH�� a LVNOMXþXMH� NDGD� LQGXNWLYQRVW� RSDGD. U
JHQHUDWRUVNRP� UHåLPX� SULQFLS� XNOMXþHQMD�LVNOMXþHQMD� ID]H� MH� REUQXW�� RGQRVQR� ID]D� VH�SREX XMH� NDGD�QMHQD� LQGXNWLYQRVW�RSDGD��D� LVNOMXþXMH� NDGD� LQGXNWLYQRVW� UDVWH��3REX LYDQMH�ID]D�VH�YUãL�SRYRUNRP�VWUXMQLK�LPSXOVD��D�NRMD�ID]D�üH�ELWL�SREX HQD�]DYLVL�RG�SRORåDMD�URWRUD�L åHOMHQRJ�UHåLPD�UDGD�
Sl. 2.1. SR motor - konstrukcija Sl. 2.2. Raspored faza
Oblik promene� LQGXNWLYQRVWL� VD� SRORåDMHP� URWRUD� VH� PRåH� YLGHWL� QD� VOLFL� 2.3.
Prikazana promena induktivnosti je u intervalu ugla θ RG���GR�����HOHNWULþQLK�VWHSHQL��8JORYL�0° i 180° odgovaraju neusaglašenim pozicijama polova statora i rotora (Lmin), dok ugao od
90° odgovara usaglašenoj poziciji (Lmax).

6
L[H]
LLmmaaxx
LLmmiinn
ϑϑ[[°°]]00 9900 118800
Sl. 2.3. Promena induktivnosti pri zanemarenim efHNWLPD�PDJQHWQRJ�]DVLüHQMD
Na slici 2.4 mogu se detaljnije pogledati ove dve pozicije rotorskog pola. Na slikama
je dat motor sa konfiguracijom 6/4, odnosno sa 6 polova na statoru i 4 pola na rotoru. Za ovu
konfiguraciju, na slici 2.3, je dat prikaz rasporeda faza po polovima.
usaglašena pozicija
�
neusaglašena pozicija
Sl. 2.4. Dve krajnje pozicije polova statora i rotora
3RUHG�NRQILJXUDFLMH������SRVWRMH�L�GUXJH��.RQILJXUDFLMH�NRMH�VH�QDMþHãüH�VUHüX�VX��6/2,
������������������2YR�VX�VYH�NRQILJXUDFLMH�VD�WURID]QLP�QDSDMDQMHP��PH XWLP�þHVWR�VH�VUHüX�NRQILJXUDFLMH� VD� þHWLUL� ID]H��8/4, 8/6, 8/10. Postoje još i dvofazne, petofazne i sedmofazne
konfiguracije� SD�þDN�L�MHGQRID]QH, mada su one manje zastupOMHQH��'HILQLVDQD�VX�RGUH HQD�SUDYLOD�X�L]ERUX�EURMD�SRORYD�VWDWRUD�L�URWRUD��PH XWLP�RQD�QLVX�LVNOMXþLYD��7D�SUDYLOD�VX�
NZS(Ns ,Nr) = q Nr ,
NZS(Ns ,Nr) > Ns > Nr ,
gde su Ns i Nr EURM�SRORYD�VWDWRUD�L�URWRUD��UHVSHNWLYQR��D�T�R]QDþDYD�EURM�ID]D��

7
Izbor konfiguracije SR motora zavisi od aplikacije u kojoj se primenjuje. Manji broj rotorskih
SRORYD�VH�SULPHQMXMH�XNROLNR�SRVWRML�]DKWHY�]D�YHüLP�EU]LQDPD��QSU��1r ����GRN�VH�YHüL�EURM�polova na rotoru (npr. Nr=6) primenjuje pri zahtevima za velikim momentom. Na slici br. 5 su
prikazane neke od spomenutih konfiguracija.
4/2 6/4 8/4
Sl. 2.5. Razne konfiguracije SR motora
7DNR H�� YHüL� EURM� ID]D� ]QDþL� L� PDQMH� SXOVDFLMH� PRPHQWD�� ãWR� GDOMH� GRYRGL� GR�VPDQMHQMD�DNXVWLþQH�EXNH��%XND� L� SXOVDFLMe momenta su dva veoma velika nedostatka SR
motora. Pulsacije�PRPHQWD��SRJRWRYR�NDGD�XWLþX�QD�SURPHQX�EU]LQH��RJUDQLþDYDMX�SULPHQX�SR motorD X� QHNLP� REODVWLPD�� NDR� ãWR� VX� VHUYR� SRJRQL�� GRN� SUHWHUDQD� EXND� RJUDQLþDYD�SULPHQX�65�PRWRUD� ]D� NXüQH�XSRWUHEH. Pulsacije momenta nastaju usled jakih magnetnih
VLOD� NRMH� SULVLOMDYDMX� SRORYH� VWDWRUD� GD� RVFLOXMX� L� WDNR� GHIRUPLãX� VWDWRUVNL� REUXþ� �MDUDP���Radijalne sile unutar motora su i preko����SXWD�MDþH�RG�WDQJHQFLMDOQLK��3UREOHP�VH�GHOLPLþQR�rešava YHüLP vazdušnim zazorom� �WLSLþQR� ����PP��PDGD� SRVWRMH�PRWRUL� VD� ]D]RURP� L� RG�1mm).�3RYHüDQMHP�]D]RUD�JXEL�VH�QD�HILNDVQRVWL�PRWRUD, tj. gubi se jedna od prednosti SR
motora, a to je dobar odnos moment/zapremina.� =DWR� X� WRP� SRJOHGX� WUHED� SURQDüL�kompromis. Buka zavisi i od stepena promene magnetnog polja.
Dakle, vidimo da pulsacije momenta i EXND� ]DYLVH� RG� JHRPHWULMH�� PHKDQLþNH�konstrukcije i upotrebljenog algoritma za upravljanje SR motorm. Pulsacije momenta se
PRJX�VPDQMLWL�SRYHüDQMHP�EURMD� ID]D��PH XWLP� WDNR�VH�XVORåQMDYD�NRQVWUXNFLMD�SRJRQVNRJ�SUHWYDUDþD� U poslednje vreme su posebno popularne tehnike adaptivne "fuzzy" kontrole ,
NDR� L� NRULãüHQMH� QHXUDOQLK� PUHåD, kao algoritmi za upravljanje SR motorom. Ostvareni su
]QDþDMQL�UH]XOWDWL�X�SREROMãDQMX�UDGQLK�NDUDNWHULVWLND�QD�RYDM�QDþLQ�
6OLþQR�GUXJLP�HOHNWULþQLP�PRWRULPD�JXELFL�HQHUJLMH�NRG�65�PRWRUD�VH�VDVWRMH�L]�GYD�GHOD�� JXELFL� X� JYRå X L� JXELFL� X� EDNUX�� 3RJodnost SR motora je nepostojanje gubitaka u
bakru na rotoru� MHU� WDPR�� NDR�ãWR� MH� YHü� UHþHQR��QHPD�QDPRWDMD. Tako da gubici u bakru
postoje samo na statoru, odakle se toplota nastala usled tih gubitaka relativno lako odvodi
YDQ� NXüLãWD� PRWRUD�� Gubici se raþXQDMX� VWDQGDUGQR� SR� IRUPXOL� RI2, gde je R efektivna

8
otpornost faze statora.�2YD�RWSRUQRVW�MH�]D�QHNROLNR�SURFHQDWD�YHüD�X�RGQRVX�QD�RWSRUQRVW�MHGQRVPHUQRM� VWUXML� ]ERJ� SRVWRMDQMD� VNLQ� HIHNWD�� 2WSRUQRVW� VH� SRYHüDYD� L� VD� SRYHüDQMHP�WHPSHUDWXUH� EDNUD�� VOLþQR� kao i kod drugih motora, 20% na svakih 50°C. Skin efekat je
QDURþLWR�L]UDåHQ�NRG�PRWRUD�NRML�UDGH�QD�YHOLNLP�EU]LQDPD��MHU�VH�WDGD�SRYHüDYD�XþHVWDQRVW�komutacija.
Dakle, gubici u baNUX� ]DYLVH� RG� SRORåDMD� UDGQH� WDþNH� PRWRUD� QD� PHKDQLþNRM�karakteristici, tj. od brzine i momenta, ali i od kontrolne strategije.
Gubici� X� JYRå X VX�SURSRUFLRQDOQL� XSUDYOMDþNRM� SUHNLGDþNRM� IUHNYHQFLML�� ãWR� ]QDþL� GD�zavise od brzine obrtanja i od izbora konfiguracije motora (broj strujnih impulsa po obrtaju).
7DNR H��JXELFL�X�JYRå u zavise od proporcija magnetnog kola, kao i od vrste upotrebljenog
JYRå D��=D� NRQVWUXNFLMX�65�PRWRUD� NRULVWH� VH� YHRPD�NYDOLWHWQL� þHOLFL�� WLSLþQR�0-17 i M-19,
dok se M-15 posebno koristi kod motora koji rade na velikim brzinama [11]. Za motore od
kojih se zahtevaju vrhunske perforPDQVH��NRULVWH�VH�+\SHUFR�L�9DQDGLXP�3HUPHQGXU�þHOLFL� 'D� EL� 65� PRWRU� UDGLR� VD� PDNVLPDOQRP� HILNDVQRãüX� QMHJRYR� PDJQHWno kolo mora biti u
GXERNRP�]DVLüHQMX��=DWR�VX� L� SRWUHEQL� YLVRNR�NYDOLWHWQL� OLPRYL�� GD�EL� XPDQMLOL� JXELWNH�XVOHG�magnetizacije i vihornih struja.

9
3. 2GUH LYDQMH�WUHQXWQH�YUednosti momenta SRM-a
3.1. (QHUJHWVNL�ELODQV�HOHNWURPHKDQLþNRJ�SUHWYDUDQMD�HQHUJLMH
3ULQFLS�RGUåDQMD�HQHUJLMH�NDåH�GD�VH�HQHUJLMD�QH�PRåH�QLWL�VWYRULWL��QLWL�XQLãWLWL�� MHGLQR�PRåH�SUHOD]LWL�L]�MHGQRJ�REOLND�X�GUXJL��.RG�HOHNWURPHKDQLþNRJ�SUHWYDUDQMD�HQHUJLMH, energija
VH�MDYOMD�X�þHWLUL�REOLND:
� (OHNWULþQD�HQHUJLMD
� 0HKDQLþND�HQHUJLMD
� Magnetna energija
� Toplotna energija
6OHGHüD�MHGQDþLQD�RSLVXMH�PH XVREQH�YH]H�RYLK�HQHUJLMD�
+
+
=
energija
.mehanodata
toplotuu
pretvorenaenergija
poljuspre� nomu
aakumulisanenergija
izvora.eliz
dovedenaenergija
(3.1)
-HGQDþLQD� MH� WDNR� QDSLVDQD� GD� þODQRYL� NRML� R]QDþDYDMX� HOHNWULþQX� L� PHKDQLþNX�HQHUJLMX�LPDMX�SR]LWLYQH�YUHGQRVWL�]D�PRWRUVNL�UDG��8�JHQHUDWRUVNRP�UHåLPX�RYL�þODQRYL�LPDMX�negativne vrednosti.
'UXJL�þODQ�VD�GHVQH�VWUDQH� MHGQDþLQH�����SUHGVWDYOMD�XNXSQe gubitke koji se javljaju
SULOLNRP�HOHNWURPHKDQLþNRJ�SUHWYDUDQMD�HQHUJLMH��7R�VX�VOHGHüL�JXELFL�
� WγCu -�JXELFL�X�QDPRWDMLPD��NUR]�NRMH�SURWLþH�VWUXMD
� Wγpolja - gubici u magnetnom jezgru usled histerezisa i vihornih struja
� Wγmeh -�PHKDQLþNL�JXELFL��WUHQMH i otpor vazduha)
2YL�JXELFL�VH�X�YLGX�WRSORWH�RVORED DMX�X�RNROQX�VUHGLQX��Ako ove gubitke razvrstamo
SR�REOLFLPD�HQHUJLMH�NRML�LK�L�VWYDUDMX��GRELüHPR�VOHGHüX�MHGQDNRVW�
+
+
+
=
−
γγγ mehpoljaCu W
energija
.mehW
polja
spre� nogenergijaW
izvora
.elenergija (3.2)

10
-HGQDþLQD�����VH�PRåH�QDSLVDWL�X�VOHGHüHP�GLIHUHQFLjalnom obliku:
mehm’mme dWdWdWdWdW +=+= (3.3)
- dWe predstavlja energiju el. izvora umanjenu za gubitke u namotajima, odnosno
QHWR�L]QRV�HOHNWLUþQH�HQHUJLMH�GRYHGHQH�X�PDãLQX��=DWR�VH�RYD�HQHUJLMD�þHVWR�QD]LYD�XQXWUDãQMD�HOHNWULþQD�HQHUJLMD.
- dWm predstaYOMD�HQHUJLMX�VSUHåQRJ�SROMD�XYHüDQX�]D�RGJRYDUDMXüH�JXELWNH��.RG�VYLK�obrtnih mašina ovo polje je elektro-magnetno.
- dW’m predstavlja magnetnu koenergiju� NRMD� VH� MRã�QD]LYD� L� XQXWUDãQMD�PHKDQLþND�
HQHUJLMD�L�RG�NRULVQH�PHKDQLþNH�HQHUJLMH�VH�UD]OLNXMH�]D�PHKDQLþNH�JXELWNH��8�MHGQDþLQL�����ovi gubici su zanemareni.
Pošto je:
Ψ⋅=⋅⋅Ψ=⋅⋅= GLGWLGWG
GWLHG:H , (3.4a)
gdje je: e - kontra elektromotorna sila, i - struja kroz posmatranu fazu, Ψ - obuhvatni fluks i t -
vrHPH��D�WDNR H�
θ⋅= G0G: HPHK , (3.4b)
gdje je Me elektromagnetni momenat i θ - XJDRQL�SRPHUDM��MHGQDþLQD��3.3) se moåe napisati
kao:
Ψ⋅+−=θ⋅ GLG:G0 PH . (3.4)
Ako se "i" i "θ" izaberu kao nezavisno promenljive tj. da je Ψ=Ψ(i,θ) i Wm=Wm(i,θ),
tada vaåi:
θθ∂Ψ∂+
∂Ψ∂=Ψ GGLL
G , (3.5)
θθ∂
∂+
∂∂
= G:
GLL
:G: PP
P . (3.6)

11
Kada se jednaþine (3.5) i (3.6) uvrste u jednaþinu (3.4) dobija se:
GLL
LL
:GL
:G0 PP
H ����∂Ψ∂+
∂∂
−+θθ∂Ψ∂+
θ∂∂
−=θ . (3.7)
Ako se uzme u obzir da je za odre eni poloåaj rotora:
∫ Ψ= GL:P , (3.8)
∫ Ψ= GL:P , (3.9)
gdje je Wm’ magnetna koenergija, lako se dolazi do sledeüe jednakosti:
PP :LGLLGL: −Ψ=∫ Ψ−Ψ=∫ Ψ= , (3.10)
što je grafiþki prikazano na slici 3.1.
ψ
L
0DJQHWQD�HQHUJLMD
0DJQHWQDNRHQHUJLMD
Sl. 3.1. Magnetna energija i koenergija u SRM-u.
Za razmatrani sluþaj, gde su "θ" i "i" nezavisne promenljive, na osnovu jednaþine
(3.10) dobija se:
ii
ii
iW
ii
ii
iW ’
mm
∂Ψ∂=Ψ−Ψ+
∂Ψ∂=
∂∂−
∂∂Ψ+
∂Ψ∂=
∂∂
. (3.11)
Ako se rezultat jednaþine (3.11) uvrsti u jednaþinu (3.7) dobija se izraz za trenutnu
vrednost momenta:
θ∂θΨ∂
+θ∂
θ∂−=θ
���������
LL
L:L0 P
H , (3.12)

12
a zatim, kombinovanjem jednaþina (3.11) i (3.12), i analogan izraz u kojem figuriše magnetna
koenergija:
θ∂θ∂
=��
��� L:
L0 PH . (3.13)
Izraz za elektromagnetni moment Me moåe se dobiti i u funkciji Me(Ψ,θ), pri þemu "Ψ"
i "θ" predstavljaju nezavisne promenljive tj. potrebno je koristiti sledeüe zavisnosti: i=i(Ψ,θ),
Wm=Wm(Ψ,θ) i Wm’=Wm
’(Ψ,θ). Pošto je u ovom sluþaju:
θθ∂
∂+Ψ
Ψ∂∂
= G:
G:
G: PPP , (3.14)
zamenom jednaþina (3.14) u (3.4) dobija se:
Ψ+θθ∂
∂−Ψ
Ψ∂∂
−=θ GLG:
G:
G0 PPH . (3.15)
S obzirom da je:
Ψ=ΨΨ∂
∫ Ψ∂=Ψ
Ψ∂∂
GLGGL
G:P ��
,
jednaþina (3.15) se svodi na:
θ∂θΨ∂
−=θΨ���
��� PH
:0 . (3.16)
Na osnovu jednaþine (3.10) dobija se:
θ∂θΨ∂
−θ∂
θΨ∂Ψ=
θ∂θΨ∂ ���������
PP :L:,
što znaþi da se izraz za moment (3.16) moåe napisati kao:
θ∂θΨ∂Ψ−
θ∂θΨ∂=θΨ ),(i),(W
),(M’m
e . (3.17)
13
Izrazi (3.16) i (3.17) predstavljaju ravnopravne izraze za raþunanje momenta, pri
þemu se figurisana energija ili koenergija magnetnog polja raþuna respektivno iz relacije
(3.8) ili (3.9).
3.2. Obrtni moment kao posledica promene magnetnog otpora
9Hü� MH� UHþHQR� GD� VH� PRPHQW� QD� YUDWLlu SR motora javlja kao posledica promene
magnetnog otpora (reluktanse)� RGQRVQR� LQGXNWLYQRVWL�� 'D� EL� DQDOLWLþNL� GRãOL� GR� MHGQDþLQD�NRMH�RSLVXMX�RYX�SRMDYX�SRVOXåLüHPR�VH�PHWRGRP�YLUWXHOQLK�UDGRYD��Pretpostavimo da se ceo
sistem sastoji iz dva pokretna i dva nepokretna pola koji su dijametralno postavljeni. Na
VWDWRUX�VX�SREXGQL�QDPRWDML�SULNOMXþHQL�QD�HO�� L]YRU� Pretpostavimo i da je pokretni deo kola
XNRþHQ�� Tada se kompletna energija el. izvora troši na uspostavljanje fluksa i pretvara u
magnetnu energijX VSUHåQRJ�SROMD�
0dWdW me += (3.18)
3UHWSRVWDYLPR��WDNR H��GD�MH�SREXGQL�QDPRWDM�QD�VWDWRUX�QDþLQMHQ�RG�1�QDYRMDND�NUR]�NRMH�SURWLþH�VWUXMD�MDþLQH�i. Tada je:
Φ=Φ=Ψ== FdNidideidtdWe (3.19)
jer je: ( )dt
i,de
θΨ+=
Na osnovu 3.18 L �����PRåHPR�SLVDWL�
Φ=Ψ= FdiddWm (3.20)
0DJQHWQR� NROR� MH� VDþLQMHQR� RG� IHURPDJQHWQLK� PDWHULMDOD�� SD� IOXNV� L� VWUXMD� QLVX� X�direktnoj srazmeri. Njihov odnos je prikazan na slici 3.2�L�UD]OLþLW�MH�]D�UD]OLþLWH�SRORåDMH�URWRUD.

14
Sl. 3.2. TLSLþQH�]DYLVQRVWL�REXKYDWQRJ�IOXNVD�RG�VWUXMH�]D�UD]OLþLWH�SRORåDMH rotora.
Kada se m.p.s. svede na nulu, tj. kada struja kroz namotaje padne na nulu, samo
MHGDQ�GHR�HQHUJLMH�NRMX�MH�SROMH�DSVRUERYDOR�X�WRNX�SURFHVD�XVSRVWDYOMDQMD�IOXNVD�VH�YUDüD�X�kolo. Ovo je zato� ãWR� GHR� HQHUJLMH� RVWDMH� X� YLGX� NLQHWLþNH� HQHUJLMH� REUWDQMD� HOHNWURQD� NRML�proizvode remanentni fluks, a deo energije se pretvara u toplotu usled histerezisa i vihornih
struja.�8�FLOMX�MHGQRVWDYQLMHJ�SURUDþXQD��RYH�JXELWNH�üHPR�]DQHPDULWL��RGQRVQR�SULKYDWLüHPR�GD�YDåL�
∫∫Ψ
Ψ
Ψ=Ψ0
0
idid
Ako pretSRVWDYLPR�GD� MH�QDMYHüL�GHR�HQHUJLMH�PDJQHWQRJ�SROMD�VPHãWHQ�X�YD]GXãQL�SURFHS� L]PH X URWRUD� L� VWDWRUD�� ãWR� MH� RSUDYGDQD� SUHWSRVWDYND� MHU� VH� QDMYHüL� GHR� HQHUJLMH�XSUDYR�WURãL�QD�VDYOD LYDQMe magnetQRJ�RWSRUD�YD]GXKD�NRML�MH�YLãHVWUXNR�YHüL�RG�magnetnog
otpora feromagnetnog materijala� 7DGD� PRåHPR� VPDWUDWL� GD� VX� IOXNV� L� P�S�V�� GLUHNWQR�srazmerni, te je prema 3.20:
2m 2
1F
2
1i
2
1W Φℜ=Φ=Ψ= (3.21)

15
gde je ℜ magnetni otpor ili reluktansa magnetnog kola:
S)H(
l
BS
lHF
⋅µ=⋅=
Φ=ℜ (3.22)
JGH� VX� O� L� 6� GXåLQD� L� SRYUãLQD� SRSUHþQRJ� SUHVHND�PDJQHWQRJ� NROD�� +� -MDþLQD�PDJQHWQRJ�polja, B -magnetna indukcija, a µ�+�� PDJQHWQD� SHUPHDELOQRVW� NRMD� MH� X� VOXþDMX� OLQHUDQLK�magnetnih materijala konstaQWQD��D�NRG�IHURPDJQHWLND�MH�X�IXQNFLML�MDþLQH�PDJQHWQRJ�SROMD�
Pretpostavimo sad da se pokretni deo magnetnog kola zakrenuo za diferencijalni
ugao dT u smeru obrtnog momenta M� 2YRP� SULOLNRP� VH� L]YUãLR� PHKDQLþNL� UDG� MdT.
Istovremeno je došlo do promene magnetnog otpora, odnosno induktivnosti namotaja, kao i
do preraspodele energije.
3UHPD�MHGQDþLQL������]D�EHVNRQDþQR�PDOX�SURPHQX�XJOD�θ ima se:
Φ+ℜΦ= Fdd2
1dW 2
m (3.23)
=DPHQRP� MHGQDþLQD� ����� L� ����� X� MHGQDþLQX� ����� NRMD� SUHGVWDYOMD� ]DNRQ� RGUåDQMD
HQHUJLMH�L�NRMD�XYHN�YDåL��GRELMDPR�
’m
2 dWFdd2
1Fd +Φ+ℜΦ=Φ (3.24)
Najzad, VUH LYDQMHP�L]UD]D������L�XYUãWDYDQMHP�X�MHGQDþLQX������GRELMDPR�
θ∂∂ℜΦ−= 2
2
1M (3.25)
.DNR�SURPHQD�VRSVWYHQH�LQGXNWLYQRVWL�QDPRWDMD�XWLþH�QD�SURPHQX�PRPHQWD��PRåH�sH YLGHWL�L]�VOHGHüLK�MHGQDþLQD�
-definišimo sopstvenu induktivnost kao
ℜ=Φ=Ψ=
2N
N/F
N
iL (3.26)

16
=DPHQLPR�VDG�MHGQDþLQH������������������L������X�MHGQDþLQX�����L�GRELüHPR�
’m
2 WLi2
1d)Li(id +
=
θ∂++=+ MdLi2
1LidtLidtdLi 22
1DM]DG��SRVOH�VUH LYDQMD�Gobijamo izraz za moment:
θ∂∂= L
i2
1M 2 (3.27)
1D�RVQRYX� MHGQDþLQD������ L������YLGLPR�GD� MH��NDR�ãWR� MH�YHü�UHþHQR�X�SUHWKRGQRP�SRJODYOMX�� SULURGD� REUWQRJ�PRPHQWD� WDNYD� GD� WHåL� GD�PDNVLPL]LUD� LQGXNWLYQRVW� SREX HQRJ�namotaja (znak + sa desne straQH�MHGQDþLQH�����)� RGQRVQR�GD�WHåL�GD�PLQLPL]LUD (znak - sa
GHVQH�VWUDQH�MHGQDþLQH�����) reluktansu.
7DNR H�� L]� LVWLK� MHGQDþLQD� VH�PRåH� ]DNOMXþLWL� GD� VWUXMD�� RGQRVQR� IOXNV� XWLþX� VYRMRP�YUHGQRãüX� QD� YUHGQRVW� PRPHQWD�� D� QH� LQWH]LWHWRP� VYRMLK� SURPHQD� Dovoljno je da fluks
SRVWRML� GD� EL� VH� SRMDYLR� REUWQL� PRPHQW� VD� WHQGHQFLMDPD� RSLVDQLP� X� MHGQDþLQDPD� ������RGQRVQR� ������ 3RVWRMDQMH�PRPHQWD� QLMH� XVORYOMHQR� SURPHQOMLYRãüX� IOXNVD��Promenu fluksa
SUDWL�PH XVREQD�UD]PHQD�HQHUJLMH�L]PH X VSUHåQRJ�SROMD�L�HOHNWULþQRJ�VLVWHPD��7R�VH�PRåH�YLGHWL� L]� MHGQDþLQD����D������ L� ����. 2YRP�SULOLNRP� MH�ELWQR�GD� IOXNV�EXGH�SURPHQOMLY�� LQDþH�QHüH�GRüL�GR�UD]PHQH�HQHUJLMH�
-HGQDþLQH������������������L������SUXåDMX�PRJXüQRVW�UDþXQDQMD�PRPHQWD�65�PRWRUD�preko magnetne energije, magnetne koenergije, induktivnosti ili magnetne otpornosti. Ako
se, s druge strane, zna da se elektromagnetni moment M raspore uje na savla ivanje
momenta optereüenja motora Mopt, momenta trenja i momenta inercije rotora, moåe se dobiti
jednaþina koja definiše dinamiku SR motora:
M= Mopt + k θ’ + I θ’’ , (3.28)
gdje je k - koeficijent trenja, I - moment inercije rotora, a θ’ i θ’’ predstavljaju prvi i drugi izvod
θ po vremenu (ugaona brzina i ubrzanje).
17
4. Kontrola SR motora
Kontrolne promenljive SR motora su, [10]:
� Nivo fazne struje
� Nivo faznog napona
� 8JDR�XNOMXþHQMD�ID]H�θON
� 8JDR�SURYR HQMD�ID]H�θD=θON-θOFF
3UYH�GYH� VX� VWDQGDUGQH� NRQWUROQH�SURPHQOMLYH� ]D�PQRJH�HOHNWULþQH�PRWRUH�� GRN� VX�GUXJH�GYH�SURPHQOMLYH� NDUDNWHULVWLþQH�]D�65�PRWRU��8SUDYR�RYH�GYH�NRQWUROQH�SURPHQOMLYH�SUXåDMX�PRJXüQRVW�UDGD�65�PRWora sa širokim spektrom�SHUIRPDQVL�L�NRQWUROQLK�PRJXüQRVWL�� 65� PRWRU� QH� PRåH� UDGLWL� VD� GLUHNWQLP� PUHåQLP� QDSDMDQMHP�� 2Q� PRUD� LPDWL� SRJRQVNL�SUHWYDUDþ� NRML� üH� SULODJRGLWL� QDSDMDQMH� SRWUHEDPD� PRWRUD�� 8� ]DYLVQRVWL� RG� XSRWUHEOMHQRJ�SRJRQVNRJ�SUHWYDUDþD��DOL�L od primenjene tehnike upravljanja mogu se ostvariti razne izlazne
karakteristike ovog motora.
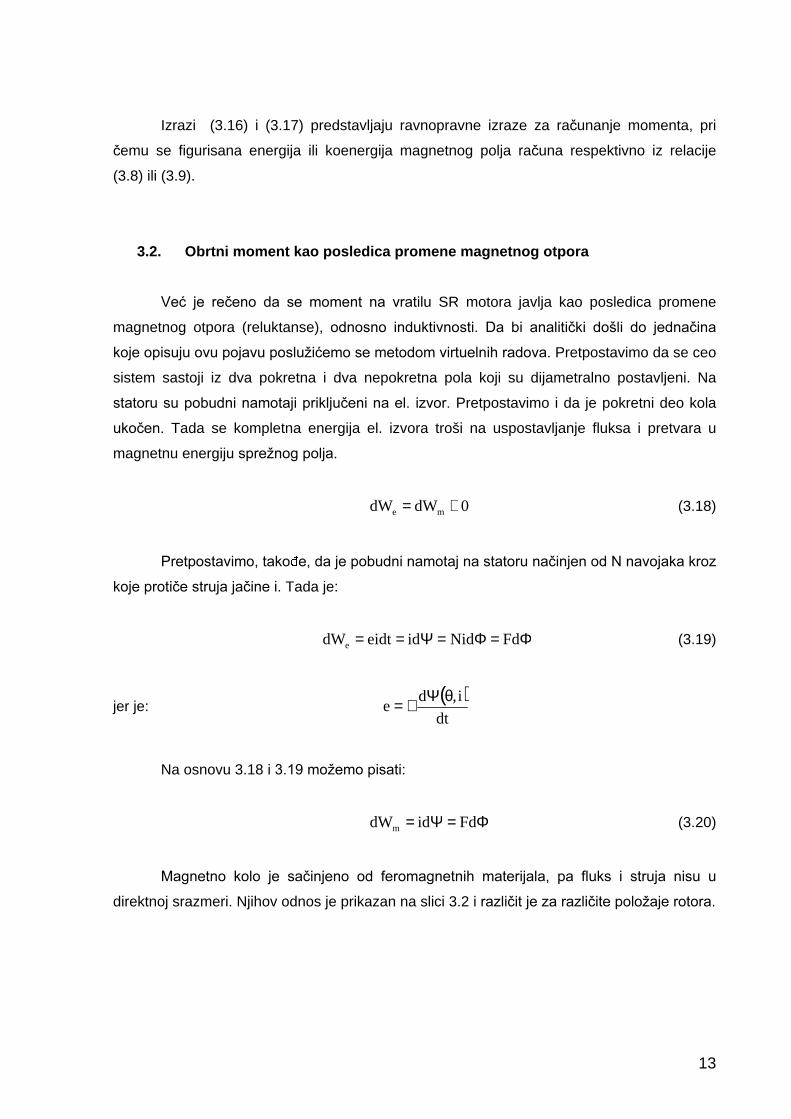
4.1. Spoljna karakteristika
0 FRQVW
0 ∼ ω ��
0 ∼ ω ��
M
ZZ R Z S
2 J UDQ Lþ HQ MH �s tru je
P o d e ša va n jeu g la
p ro vo e n ja P riro d n a
k a ra k te r is t ik a
Sl. 4.1 Spoljna karakteristika SR motora

18
Na slici 4.1 je predstavljena izlazna (spoljna) karakteristika SR motora, [10]. Odmah se
]DSDåDMX�WUL�REODVWL� I -oblast konstantnog momenta,
II -oblast konstantne snage,
III -oblast prirodne karakteristike.
Granica prve oblasti je osnovna brzina. Na brzinama manjim od osnovne je
QHRSKRGQR� RJUDQLþDYDWL� VWUXMX� SULPHQRP� QHNH� RG tehnika naponske širinsko impulsne
PRGXODFLMH� LOL� þRSRYDQMD� VWUXMH�� 5D]ORJ� RYRPH� MH� VXYLãH� GXJDþDN� YUHPHQVNL� SHULRG� NRML�RGJRYDUD� XJOX� SURYR HQMD�� θD. Ukoliko bi se tokom celog ugla θD primenjivao maksimalni
napon, struja bi dostigla nedopustivo visoku vrHGQRVW� L� XJUR]LOD� PRWRU� LOL� SROXSURYRGQLþNH�HOHPHQWH� SR� SLWDQMX� WHUPDOQRJ� OLPLWD�� 2JUDQLþDYDQMHP� VWUXMH�� RJUDQLþDYD� VH� L� SUHYDOQL�moment� 2VQRYQD�EU]LQD�VH�GHILQLãH�NDR�RQD�EU]LQD�SUL�NRMRM�VH�SRVWLåH�PDNVLPDOQD�VWUXMD�primenjivanjem nominalnog napona pri fiksnim uglovima θON i θOFF. Karakteristike I oblasti su:
� 3ULEOLåQR�NRQVWDQWQD�VUHGQMD�YUHGQRVW�PRPHQWD� � 6WUXMX�MH�QHRSKRGQR�RJUDQLþLWL� � Uglovi θON i θOFF su konstantni.
Granice druge oblasti su osnovna brzina sa donje strane i ωp sa gornje strane. U ovoj
REODVWL�VWUXMD�MH�RJUDQLþHQD�NRQWUD�H�P�V���WH�VH�WRNRP�þLWDYRJ�XJOD�SURYR HQMD�θD primenjuje
QRPLQDOQL�QDSRQ��EH]�ERMD]QL�GD�üH�VWUXMD�SUHNRUDþLWL�PDNVLPDOQX�YUHGQRVW� U ovoj oblasti je
PRJXüH� RGUåDYDWL� VQDJX� QD� NRQVWDQWQRM� YUHGQRVWL�� 2YR� VH� SRVWLåH� SRYHüDYDQMHP� XJOD�SURYR HQMD�� 8JDR� SURYR HQMD� VH� SRGHãDYD� WDNR� GD� ]DYLVQRVW� IOXNV-brzina bude oblika:
φ∼ω-1/2. Pri ovakvom uglu θD spoljna karakteristika motora ima oblik M∼ω-1, odnosno snaga je:
P=M⋅ω=const. Maksimalna brzina oblasti konstantne snage, ωp, MH�RQD�EU]LQD�NRMD�VH�SRVWLåH�pri uglu θD MHGQDNRP�SRORYLQL�SROQRJ�NRUDND��RGQRVQR�SRORYLQL�HOHNWULþQRJ�FLNOXVD��2YGH�VH�podrazumeva da su naponi magnetizacije i demagnetizacije isti. Ukoliko bi nastavili sa
SRYHüDYDQMHP� XJOD� SURYR HQMD�� VWUXMD� ]D� YUHPH� demagnetizacije ne bi opala na nulu i
NXPXODWLYQR�� NUR]� YLãH� FLNOXVD� EL� VH� SRYHüDYDOD� L� QDM]DG� SUHãOD� PDNVLPDOQR� GR]YROMHQX�vrednost.� (YHQWXDOQR� SURGXåHQMH� ,,� REODVWL� VH� PRåH� SRVWLüL� SRYHüDQMHP� QDSRQD�demagnetizacije. Karakteristike II oblasti su:

19
� Snaga je konstantna,
� 3URPHQD�XJOD�SURYR HQMD� � Spoljna karakteristika oblika: M∼ω-1,
� 1HPD�IRUVLUDQRJ�RJUDQLþDYDQMD�VWUXMH�
.DGD�VX�EU]LQH�YHüH�RG�ωp� UDGQD�WDþND�QD�VSROMQRM�NDUDNWHULVWLFL�]DOD]L�X�,,,�REODVW��8�RYRM�REODVWL�QLMH�GR]YROMHQR�SRYHüDYDQMH�XJOD�SURYR HQMD�L�RQ�VH�GUåL�QD�ILNVQRM��PDNVLPDOQRM��YUHGQRVWL�� 3RãWR� MH� XJDR� SURYR HQMD� NRQVWDQWDQ�� YUHPH� NRMH� PX� RGJRYDUD� MH� REUQXWR�proporcionalno sa brzinom (tp=θD⋅ω-1). Fluks je proporcionalan primenjenom naponu i
YUHPHQX� SURYR HQMD� �φ∼∫Udt=Utp), a pošto je QDSRQ� SURYR HQMD� NRQVWDQWDQ� L� QRPLQDODn,
sledi da je fluks obrnuto proporcionalan brzini obrtanja. Moment je proporcionalan kvadratu
fluksa� �MHGQDþLQD� �����, te je M∼ω-2, a snaga je: P=M⋅ω ∼ ω-1. Ova oblast se još naziva i
prirodnom karakteristikom. Njene osnovne karakteristike su:
� 8JDR�SURYR HQMD��θD, je maksimalan,
� Uglovi magnetizacije i demagnetizacije su konstantni,
� Spoljna karakteristika ima oblik M∼ω-2.
4.2 Algoritmi za upravljanje SR motorom
Pošto smo se, u prethodnom poglavlju, upoznali sa spoljnom karakteristikom SR
motora, sad PRåHPR� GHILQLVDWL� L� QDþLQH�� RGQRVQR� DOJRULWPH� ]D� XSUDYOMDQMH� LVWLP�� .RML� VX�]DKWHYL"� 3UYR�� LPDPR� ]DKWHY� ]D� RJUDQLþHQMHP� VWUXMH� X� VOXþDMX� UDGD� VD� EU]LQRP� LVSRG�RVQRYQH��.DR�ãWR� MH� UHþHQR��RYDM�]DKWHY�VH� UHDOL]XMH�SULPHQRP�neke od tehnika naponske
ãLULQVNR� LPSXOVQH� PRGXODFLMH� LOL� þRSRYDQMHP� VWUXMH� Drugo, u oblasti konstantne snage,
LPDPR�]DKWHY�]D�SRPHUDQMH�XJOD�SURYR HQMD��RGQRVQR�XJORYD�θON i θOFF.
3RVWRMDQMH�SRJRQVNRJ�SUHWYDUDþD�MH�QHRSKRGQR��NDR�ãWR�MH�YHü�UHþHQR��2ELþno je to
LQYHUWRU�� 2� UD]QLP� PRJXüQRVWLPD� SR� SLWDQMX� WRSRORJLMH� LQYHUWRUD� ELüH� UHþL� X� QDUHGQRP�SRJODYOMX�� ]D� VDGD� üHPR� VDPR� REMDVQLWL� PRJXüH� UHåLPH� UDGD� 65� PRWRUD��Na slici 4.2 je
SUHGVWDYOMHQD� MHGQD� JUDQD� LQYHUWRUD�� 3RPRüX� RYH� VOLNH� FHPR� REMDVQLWL� SRMPRYH�PDJQHWL]DFLMH�� VDPRUDVWHUHüHQMD� L� IRUVLUDQH� GHPDJQHWL]DFLMH� Fazni namotaj motora je
SUHGVWDYOMHQ�VYRMRP�LQGXNWLYQRãüX��/1) i otporom (r1).

20
L1
r1
S1
S2
U
D1
D2
+
-
Sl. 4.2 Grana invertora
� Magnetizacija -na fazni namotaj se dovodi pun napon napajanja uNOMXþHQMHP� RED�tranzistora S1 i S2� 2ELþQR� VH� RYDM� SURFHV� ]DSRþLQMH� SUH� SRþHWND� SUHNODSDQMD� rotorskog i
VWDWRUVNRJ� SROD�� RGQRVQR� SUH� SHULRGD� SRYHüDQMD� VRSVWYHQH� LQGXNWLYQRVWL� QDPRWDMD�� 'DNOH�imamo prosto r-/ NROR� SREX HQR� NRQVWDQWQLP� QDSRQRP� +U. Odziv ovakvog sistema je
HNVSRQHQFLMDODQ�L�VWUXMD�üH�QDJOR�SRUDVWL��3RWUHEQD�MH�GRYROMQD�VWUXMD�GD�]DGRYROML� MHGQDþLQX������� RGQRVQR� SRWUHEH� ]D� PRPHQWRP�� 6� GUXJH� VWUDQH�� VWUXMD� QH� VPH� GD� EXGH� YHüD� RG�maksimalno dozvoljene.� 3URFHV� PDJQHWL]DFLMH�� ]D� PRWRUQL� UHåLP�� QH� bi trebao da traje u
SHULRGX�RSDGDQMD�LQGXNWLYQRVWL��MHU�X�WRP�VOXþDMX�VH�JHQHULãH�NRþLRQL�PRPHQW� � 6DPRUDVWHUHüHQMH -fazni namotaj je u kratkom spoju tako što je otvoren samo jedan
RG�SUHNLGDþD�61 ili S2� 0RJXüH�VX�GYD�SXWD�NRMLPD�VH�VWUXMD�PRåH��]DWYRULWL": S1-L1-r1-D2 ili S2-
L1-r1-D1� 8� RED� VOXþDMD� VWUXMD� HNVSRQHQFLMDOQR� RSDGD� VD� YUHPHQVNRP� NRQVWDQWRP� τ=L1/r1.
2YDNYD�GHPDJQHWL]DFLMD�MH�VSRUD�L�QLMH�GRYROMQR�HILNDVQD�]D�VOXþDM�YHOLNLK�EU]LQD��NDGD�VWUXMD�mora brzo da padne na nulu.
� Forsirana demagnetizacija -ID]QL� QDPRWDM� MH� SULNOMXþHQ� QD� QHJDWLYQL� NUDM� QDSRQD�QDSDMDQMD� WDNR�ãWR� VX�RED� WUDQ]LVWRUD� LVNOMXþHQD� L� VWUXMD�PRåH�GD� VH� �]DWYRUL�� jedino preko
GLRGD�� (QHUJLMD� VH� YUDüD� L]YRUX ili troši na nekom otporniku. Brzina opadanja struje je
direktno proporcionalna primenjenom naponu.
Naponska širinsko impulsna modulacija (PWM - Pulse Width Modulation) ima dve
YDULMDQWH�� 2QD� PRåH� ELWL� PHND� �VRIW�� LOL� WYUGD� �KDUG��� 0HNom PWM regulacijom na fazni
namotaj dovodimo ili napon napajanja ili nulti napon. Odnosno, demagnetizacija se vrši
VDPRUDVWHUHüHQMHP. Kod tvrde regulacije na raspolaganju su nam pozitivni i negativni napon
napajanja, odnosno, demagnetizacija je forsirana. 5D]OLND� L]PH X RYH� GYH� YDULMDQWH� 3:0�UHJXODFLMH� MH� X� EU]LQL� SURPHQH� VWUXMH� NRMD� SURWLþH� NUR]� ID]QL� QDPRWDM�� .RMD� üH� VH� YDULMDQWD�

21
SULPHQMLYDWL� ]DYLVL� RG� åHOMHQLK� NDUDNWHULVWLND�SRJRQD�� D� SUH� VYHJD�RG�EU]LQH�QD� NRMRM�PRWRU�radi.
6WUXMQD� UHJXODFLMD� VH� SRVWLåH� KLVWHUH]LVQLP� UHJXODWRURP�� 5D]OLþLWLP� SRGHãDYDQMHP�SDUDPHWDUD�UHJXODWRUD�PRJXüH�MH�RSHW�GRELWi tvrdu ili meku regulaciju.
.RMX� RG� GYH�PRJXüH� UHJXODFLMH�� VWUXMQu ili naponsku, primeniti zavisi od aplikacije.
Strujna�UHJXODFLMD�MH�EUåD�L�SUHFL]QLMD��SD�VH�SULPHQMuje kod servo pogona visokih performansi
ili, generalno, kod pogona sa momentom kao kontrolisanom promenljivom. Princip strujne
regulacije je prikazan na slici 4.3. Mogu se primetiti tri povratne sprege. Najdublje
XJQMHåGHQD�SHWOMD�MH�VWUXMQD�NRQWUROQD�SHWOMD��.DR�WDNYD�RQD�LPD�QDMEUåL�RG]LY��ãWR�RPRJXüXMH�brzu regulaciju struje, a samim tim i momenta. Strujna referenca je podešena zadatim
momentom, a neophodno je meriti sve tri fazne struje. Ovde se podrazumeva da je
maksimalni napon napajanja uvek dostupan i dovoljan za brzo injektovanje struje u motor.
Kod ovog tipa regulacije neophodno je� SULVXVWYR� VHQ]RUD� SR]LFLMH�� þLML� VLJQDO� þLQL� VOHGHüX�NRQWUROQX�SHWOMX��=D�NRQWUROX�PRPHQWD�GRYROMQH�VX�RYH�GYH�NRQWUROQH�SHWOMH��PH XWLP��XNROLNR�åHOLPR�GD�NRQWUROLãHPR�EU]LQX��QHRSKRGQD� MH� MRã� MHGQD�NRWUROQD�SHWOMD��SR�EU]LQL��NDR� L�EORN�NRML� UDþXQD�SUHQosnu funkciju brzina/moment. 2YDNYD�NRQILJXUDFLMD�REH]EH XMH�NRQVWDQWDQ�moment u širokom opsegu brzina.
Nedostataci strujne regulacije VX�VORåHQRVW� L�]DKWHY za velikim brojem senzora. Broj
VHQ]RUD� VH�PRåH� VPDQMLWL� NRG�PRWRUD� NRML� LPDMX� YLãH� RG� WUL� ID]H�� 7DGD� VH�PRåH� LVNRULVWLWL�jedan senzor za merenje struja u nesusednim fazama. 2YR� MH� PRJXüH� VDPR� SULPHQRP�algoritama kod kojih nema preklapanja strujnih impulsa u nesusednim fazama, a takva je
YHüLQD�
Z Z
G(s)
M
I Kontrolaugla Komutator
Pogonskipretvaraþ SRM
SGN(*)
+
�Vdc
TON
T
TOFF
Pozicioni senzor
I
$%&
I*
M*
Sl. 4.3 Principska šema strujne regulacije SR motora

22
1DSRQVND�UHJXODFLMD�VH�NRULVWL�NRG�SRJRQD�QLåLK�SHUIRrmansi. Principska šema je data
QD VOLFL� ����� .DR� ãWR� VH� PRåH� SULPHWLWL�� MHGQRVWDYQLMD� MH� RG� VWUXMQe regulacije, mada ipak,
zahteva postojanje senzora pozicije. Iz karakteristike brzina/napon se dobija naponska
UHIHUHQFD� NRMD� VOXåL� NDR� XOD]QL� VLJQDO� 3:0� EORNX�� 3:0� EORN� UDþXQD� L� SURVOH XMH� VLJQDOH�XNOMXþHQMD� SRMHGLQLK� ID]QLK� SUHNLGDþD� SRJRQVNRP� SUHWYDUDþX�� 2YDNDY� QDþLQ� NRQWUROH� QH�zahteva strujne senzore na svakoj fazi motorD��2ELþQR�SRVWRML�VDPR�MHGDQ�VWUXMQL�VHQ]RU�L�WR�X MHGQRVPHUQRP� PH XNROX� SRJRQVNRJ� SUHWYDUDþD�� 1MHJRYD� IXQNFLMD� MH� ]DãWLWQD�� D� QH�XSUDYOMDþND�- ãWLWL�SRJRQVNL�SUHWYDUDþ�RG�VWUXMQRJ�SUHNRUDþHQMD��Naponska PWM regulacija se
koristi kod brzinski regulisanih pogona. Glavni nedostatak ove regulacije je spor odziv
sistema.
Z
ZH(s)
Komutator
Pogonskipretvaraþ SRM
Kontrola ugla
�
�V*
Tu
Pozicioni senzor
PWM kontrola
Tis TZ
Sl. 4.4 Principska šema naponske regulacije SR motora
Kada je brzina motora velika, iznad osnovne brzine ω0, kontra e.m.s se suprotstavlja
naponu napajanja i re]XOWXMXüL�QDSRQ, kojim se injektuje struja,�MH�]QDþDMQR�PDQML�RG�QDSRQD�QDSDMDQMD�� äHOMHQL� PRPHQW� MH� SURSRUFLRQDODQ� NYDGUDWX� VWUXMH�� MHGQDþLQD 3.27. Da bi se
zadovoljio zahtev za momentom neophodno je da se strujni impuls dovede motoru pre nego
što se poloYL�VWDWRUD� L� URWRUD�SRþQX�SUHNODSDWL��1D�RYDM�QDþLQ�VH�VWUXMD�RJUDQLþDYD�PDQMRP�impedansom, jer je sopstvena induktivnost faznog namotaja minimalna, i struja ima vremena
da dosegne potrebni nivo. Sa druge strane, neophodno je redukovati struju na dovoljno mali
QLYR�SUH�SRþHWND�UD]PLPRLODåHQMD�SRORYD�GD�EL�VH�L]EHJDR�NRþLRQL�PRPHQW��2YR�VH�SRVWLåH�blagovremenom komandom ugla θOFF� RGQRVQR� SRþHWNRP� GHPDJQHWL]DFLMH�� 0RåH� VH�]DNOMXþLWL� GD� MH� X� REODVWL� NRQVWDQWH� VQDJH� RG� VXãWLQVNH� YDåQRVWL� GREUR� SURFHQLWL� XJDR�pUHGQMDþHQMD� VWUXMQRJ� LPSXOVD�� Ovaj ugao definiše za koliko se pomeraju uglovi
magnetizacije, θOn, i demagnetizacije, θOFF, u zavisnosti od brzine motora i njegovog
RSWHUHüHQMD��8JDR�SUHGQMDþHQMD�VH�PRåH�L]UDþXQDWL�NRULVWHüL�VOHGHüX�ORJLNX�

23
Napišimo prvo QDSRQVNX�MHGQDþLQX�
dt
dRIU
Ψ+= , odnosno, pošto je I)(L ⋅θ=Ψ , dobijamo:
dt
)(dLI
dt
dI)(LRIU
θ⋅+⋅θ+=
1D�SRþHWNX�SURFHVD�PDJQHWL]DFLMH�VWUXMD je, ako postoji, veoma slabog inteziteta, a
sopstvena induktivnost faznog namotaja je Lmin L VODER�VH�PHQMD��VYH�GR�SRþHWND�SUHNODSDQMD�SRORYD�� 9Hü� VPR� UHNOL� GD� VH� VWUXMQL� LPSXOV� GRYRGL� XSUDYR� X� SHULRGX� GRN� MRã� QLMH� GRãOR� Go
preklapanja polova� WDNR�GD�PRåHPR�SLVDWL�
ω⋅θ∆
∆⋅=⋅= IL
dt
dILU minmin
2EHOHåLPR sa θOVER�XJDR�SUL�NRP�SRþLQMH�SUHNODSDQMH�Uotorskog i statorskog pola, a
XJDR� SUHGQMDþHQMD� GHILQLãimo kao: θADV = ∆θ =θON - θOVER. Ako nam je za ostvarivanje
potrebnog momenta u trenutku tON=θON/ω potrebna struja Iref, onda REUD]DF� ]D� SULEOLåQR�L]UDþXQDYDQMH�XJOD�SUHGQMDþHQMD�JODVL�
U
IL refminADV
ω⋅=θ (4.1)
'DNOH�� XJDR� SUHGQMDþHQMD�� θADV, je direktno srazmeran minimalnoj sopstvenoj
LQGXNWLYQRVWL� ID]QRJ� QDPRWDMD�� RSWHUHüHQMX�PRWRUD�� RGQRVQR� VWUXML� L� EU]LQL� REUWDQMD�� GRN� MH�obrnuto proporcionalan primenjenom naponu. Minimalna sopstvena induktivnost faznog
namotaja, Lmin� MH�LQGXNWLYQRVW�SUL�QHXVDJODãHQRM�SR]LFLML�URWRUD�L�VWDWRUD�L�NDR�WDNYD�VH�PRåH�meriti.
8 MHGQDþLQL� ���� MH� ]DQHPDUHQR� SRVWRMDQMH� NRQWUD� H�P�V�� ãWR� QLMH� VOXþDM� X� UHDOQRP�motoru. PUHWSRVWDYOMD�VH� L�GD� MH�YUHGQRVW�VWUXMH�EOLVND�QXOL��ãWR�QH�PRUD�XYHN�GD�YDåL. Zbog
RYLK�L�VOLþQLK�]DQHPDUHQMD��RELþQR�VH�X�MHGQDþLQX�����XYRGL�NRHILFLMHQW�.!���NRML�NRPSHQ]XMH�JUHãNX�X�PRGHOLUDQMX�XJOD�SUHGQMDþHQMD��7DNR�GD�MH�NRQDþQD�IRUPXOD�]D�L]UDþXQDYanje ugla
SUHGQMDþHQMD�

24
U
ILK refmin
ADV
ω⋅⋅=θ (4.2)
6 RE]LURP� QD� QHRSKRGQRVW� YHRPD� SUHFL]QRJ� SRGHãDYDQMD� XJOD� SUHGQMDþHQMD� X�REODVWL�NRQVWDQWQH�VQDJH�� MHGQDþLQD�����QLMH�GRYROMQD��8�SUDNVL�VH�SULPHQMXMH� UHJXODWRU�NRML��OHþXMH�� XJDR� θi, odnosno moment kada struja faznog namotaja dosegne komandovanu
vrednost. Ugao θi VH� SRUHGL� VD� XJORP� SUHNODSDQMD� SRORYD�� D� 3,� UHJXODWRU� WHåL� GD� UD]OLNX�L]PH X RYD� GYD� XJOD� VYHGH� QD� QXOX�� 5DGL� EUåHJ� YUHPHQVNRJ� RG]LYD�� X� UHJXODWRUX� MH�LQSOHPHQWLUDQD�MHGQDþLQD������3ULQFLSVNa šema opisanog regulatora je prikazana na slici 4.5.
Tr=k Iref Z Lu / U
K / (z+1)
LATCH kolo
Tr
Ti
TerrTprek
T
Iref
Ifaze
��
Tpred
Iref
U
Z
62)79(5 +$5'9(5
Sl. 4.5 3ULQFLSVND�ãHPD�UHJXODWRUD�XJOD�SURYR HQMD

25
4.2.1 $OJRULWPL�EH]�GDYDþD�SR]LFLMH ("sensorless")
6HQ]RU� SR]LFLMH� MH� QHSRåHOMDQ� X� VYDNRP� SRJRQX�� D� SRJRWRYR� X� SRJRQLPD� sa SR
PRWRULPD��1HJDWLYQH�SRVOHGLFH�SRVWRMDQMD�VHQ]RUD�SR]LFLMH�VX��YHüD�FHQD�L�JDEDULW�PRWRUD� a
VPDQMHQD� UREXVQRVW� L� SRX]GDQRVW�� NDR� L� RJUDQLþHQ� UDG� X� XVORYLPD� YLVRNH� WHPSHUDWXUH� L�intenzivnih vibracija.
Najjednostavniji algoritam za kontrolu SR motora EH]� GDYDþD� SR]LFLMH� XRSãWH� QH�NRULVWL� LQIRUPDFLMX�R�SR]LFLML��8�RYRP�VOXþDMX�65�PRWRU�UDGL�X�RWYRUHQRM�SHWOML� ��RSHQ-loop") i
MHGLQD�NRQWUROQD�SURPHQOMLYD� MH�XþHVWDQRVW�NRPXWDFLMD��0RWRU�VH�RNUHüH�VLQKURQRP�EU]LQRP�SRSXW�NRUDþNRJ�PRWRUa� ]D�NRML�MH�YHü�UHþHQR�GD�MH�SR�PQRJLP�NDUDNWHULVWLNDPD�YHRPD�VOLþDQ�SR motoru.�$OJRULWDP�VDGUåL�L�VWDELOL]DFLRQR�NROR�NRMH�GHWHNWXMH�SURPHQH�X�UDGX�PRWRUD�L�YUãL�NRUHNFLMX� UDGQRJ� UHåLPD�� %URM� DSOLNDFLMD� X� NRMLPD� MH� PRJXüH� SULPHQLWL� RYDM� DOJRULWDP�upravljanja je veoma ograniþHQ�VDPRP�þLQMHQLFRP�GD�DOJRULWDP�QH�GR]YROMDYD� LQWHQ]LYQH� L�QDJOH� SURPHQH� PRPHQWD� RSWHUHüHQMD�� 7DNR H�� QHRSKRGQD� VX� SRVHEQD� SRGHãDYDQMD� ]D�VYDNX�SRMHGLQDþQX�DSOLNDFLMX�
*HQHUDOQR��DNR� L]X]PHPR�JRUQML�SULPHU�� VYL�DOJRULWPL� NRML�QH�NRULVWH�GDYDþ�SR]LFLMH��vrše estimaciju pozicije. (VWLPDFLMD� VH�YUãL� SRVUHGQR� L� X� WX� VYUKX�VH�NRULVWL� þLQMHQLFD�GD�VH�LQGXNWLYQRVW�]QDþDMQR�PHQMD�VD�SR]LFLMRP��NDR� L�YLVRN�VWHSHQ�QH]DYLVQRVWL� ID]QLK�VWUXMD��Za
sada postoje tri smera u kojima se razvijaju "sensorless" algoritmi:
� Na modelu zasnovana estimacija pozicije ( "Observer" )
� Aktivno merenje impedanse, odnosno induktivnosti
� Pasivno, konstantno merenje iduktivnosti.
Observer� VH� ]DVQLYD� QD� L]UDGL�PDWHPDWLþNRJ�PRGHOD� UHDOQRJ�PRWRUD�� NRML� üH� UDGLWL�paralelno sa realnim motorom. Ulazi u sistem se dovode i realnom motoru i njegovom
PRGHOX��GRN�VH�L]OD]L�XSRUH XMX��.DR�L]OD]QL�VLJQDOL�PDWHPDWLþNRJ�PRGHOD�PRWRUD�VX�VWUXMD�L�brzina.�2YR�VX�HVWLPLUDQH�YUHGQRVWL�L�RQH�VH�XSRUH XMX�VD�UHDOQLP�YHOLþLQDPD��QSU��PHUHQRP�realnom strujom motora. Na osnovu signala greške, formira se povratna sprega regulacije,
[13].
Prednost observera je u jednostavnosti sistema u hardverskom pogledu. Ne zahteva
VH�GRGDWQD�SREXGD�PRWRUD�SRPRüX�NRMH�EL�VH�PHULOD�LQGXNWLYQRVW��8�WRP�SRJOHGX��DOJRULWDP�nije ogrDQLþHQ�QD�UDG�SUL�YHüLP�EU]LQDPD�� MHU�PRJXüQRVW�SUHNODSDQMD�VWUXMD�X�VXVHGQLP��SD�

26
þDN� L� QHVXVHGQLP� ID]DPD� QH� SUHGVWDYOMD� SUREOHP�� 2YDNYL� L� VOLþQL� DOJRULWPL� PRJX� ELWL�LVNRULãüHQL� L�]D�HVWLPDFLMX�QHNe GUXJH�YHOLþLQH��D�QH�VDPR�EU]LQH��1D�SULPHU��PRåH�VH�YUãLti procena momenta, frekvencije i sl.
Nedostaci observera kao algoritma za upravljanje SR motorom su pre svega zahtev
]D� YHRPD� VORåHQLP� UHDO-WLPH� UDþXQDQMHP� L� ]DKWHY� ]D� YHRPD� SUHFL]QLP� SR]QDYDQMHP�parametara motora. Ne mali problem je napraviti precizan mRGHO� PRWRUD�� þDN� L� SRG�pretpostavkom da su poznati parametri motora. Dalje, problem se javlja i prilikom starta,
NDGD�QH�SRVWRML� �UDGQD� LVWRULMD�� NRMX�EL�PDWHPDWLþNL�PRGHO�PRJDR�GD� LVNRULVWi kao inicijalne
vrednosti. S druge strane, pri naglim promenama raåLPD� UDGD�PRJXüD� MH�SRMDYD�JUHãNH�X�HVWLPDFLML�� MHU� LSDN� MH� SRWUHEDQ� RGUH HQL� PLQLPDOQL� YUHPHQVNL� SHULRG� GD� EL� HVWLPDWRU�konvergirao. Usled svih ovih problema postavlja se i pitanje stabilnosti.
Aktivno merenje impedanse se zasniva na injektovanju visokofrekventnog signala u
fazni namotaj, [12]� 1D�RVQRYX�RG]LYD�PRJXüH�MH�L]PHULWL�LPSHGDQVX�ID]QRJ�QDPRWDMD��D�YHü�MH� UHþHQR�GD� MH� LPSHGDQVD��RGQRVQR� LGXNWLYQRVW��X� IXQNFLML�SRORåDMD� URWRUD�� WDNR�GD�VH�NDR�NRQDþDQ�UH]XOWDW�GRELMD�HVWLPDFLMD�SR]LFLMH��,QMHNWRYDnje VF signala u fazni namotaj PRåH�ELWL�X SHULRGX�NDGD�ID]D�QLMH�SREX HQD�LOL�NDGD�MHVWH��2G�LQWHUHVD�MH�RGUHGLWL�PRPHQW�NRPXWDFLMH��WDNR�GD�MH�þHãüL�VOXþDM�LQMHNWRYDQMD�9)�VLJQDOD�SUL�QHSREX HQRM�ID]L��.RG�9)�VLJQDOD�SHULRGD�je mala, te se u tom kratkom YUHPHQVNRP�LQWHUYDOX�LQGXNWLYQRVW�PRåH�VPDWUDWL�NRQVWDQWQRP��RGQRVQR�PRåHPR�SLVDWL�
U ≈ L(θ) ∆I / ∆T (4.3)
Jednu od vrednosti, ∆I ili ∆T, uzimamo kao konstantu, dok je druga vrednost
nepoznata koja se meri. Kada su nam poznati i prag struje, ∆I i vremenski interval, ∆T, na
RVQRYX�MHGQDþLQH�����PRJXüH�MH�L]UDþXQDWL�LQGXNWLYQRVW�L�L]YUãLWL�SURFHQX�SRORåDMD�URWRUD��$NR�se vremenski interval ∆T uzme kao konstanta, ∆I predstavlja pik struje za taj interval.
.RPXWDFLMD�VH�PRåH�SRGHVLWL�WDNR�GD�VH�GHVL�þLP�∆I padne ispod zadate vrednosti.
Aktivno merenje impedanse, kao algoritam upravljanja, ne zahteva period
NRQYHUJHQFLMH��ãWR�JD�þLQL�EUåLP�L�SRX]GDQLMLP�SUL�YHüLP�EU]LQDPD��7DNR H��RYDM�DOJRULWDP�VH�PRåH�VSURYHVWL�EH]�RE]LUD�QD�YDULMDFLMX�SDUDPHWDUD�PRWRUD�
IaNR�MH�DOJRULWDP��WHRUHWVNL��PRJXüH�SULPHQMLYDWL�QD�YHRPD�ãirokom opsegu brzina, pri
MDNR� YHOLNLP� EU]LQDPD� MDYOMD� VH� SUREOHP� RJUDQLþHQRVWL� ∆T. Radni ciklus merenog impulsa

27
mora biti manji od 50%, a prvih nekoliko µs odziva je ometeno vihornim strujama, tako da je
minimalna vrednost ∆T reda 20 µs neophodna za radni ciklus od 30 -������2YR�]QDþL�GD�MH�QDMNUDüH�PRJXüH�YUHPH�PHUHQMD�UHGD����µs.
Npr. za rezoluciju od 3° LPD�VH�VOHGHüL�UDþXQ�
360/3 = 120 merenja
120*50µs = 6 ms
⇒ ωmax = 10 000 o/min
Ovaj algoritDP� MH� YHRPD� RVHWOMLY� QD�PH XVREQX� LQWHUDNFLMX� ID]D�� =DWR� DOJRULWDP� ]D�DNWLYQR�PHUHQMH�LPSHGDQVH�SRND]XMH�EROMH�UH]XOWDWH�NRG�þHWYRURID]QLK�65�PRWRUD��QHJR�NRG�WURID]QLK��.RG�þHWYRURID]QLK�PRWRUD�PHUHQMH�VH�XYHN�PRåH�L]YHVWL�WDNR�GD�PHUHQD�ID]D�QLMH�susedna sa onom koja proizvodi moment.
7DNR H�� QHGRVWDWDN� RYDNYRJ� DOJRULWPD� MH� SRVWRMDQMH� GRGDWQRJ� KDUGYHUD�� NRMH�SRYHüDYD� FHQX� SRJRQD�� D� VPDQMXMH� SRX]GDQRVW� MHU� SRVWRML� MRã� MHGQD� NRPSRQHQWD� VD�PRJXüLP�RWND]RP�
Pasivno, konstantno merenje iduktivnosti je ustvari skup više algoritama koji
RPRJXüDYDMX�NRQVWDQWQL�PRQLWRULQJ�SURPHQH�LGXNWLYQRVWL��2YL�DOJRULWPL�VH�PRJX�SRGHOLWL�X�WUL�podgrupe, [11]:
- 3RUH HQMH�WDODVQRJ�REOLND�VWUXMH� - Merenje nivoa struje i
- Merenje brzine uspostavljanja struje.
3RUH HQMH�WDODVQRJ�REOLND�VWUXMH�VH�]DVQLYD�QD�þLQMHQLFL�GD�VWUXMD�WLSLþQRJ�65�PRWRUD�ima grbu. Ideja je odrediti nagib krive koja predstavlja talasni oblik struje SR motora, i
detektovati vrh struje, odnosno «koleno».
5D]OLþLWL� PRWRUL� LPDMX� UD]OLþLWH� WDODVQH� REOLNH� VWUXMH�� D� þDN� L� LVWL� PRWRU� SUL� UD]OLþLWLP�RSWHUHüHQMLPD� LPD� UD]OLþLWH� WDODVQH�oEOLNH� VWUXMH��'DNOH�� YHOLNL� MH�SUREOHP�QD�SUDYLODQ�QDþLQ�GHWHNWRYDWL� WDODVQL� REOLN� VWUXMH�� -Rã� MHGDQ� YHOLNL� QHGRVWDWDN� RYH� PHWRGH� MH� QHPRJXüQRVW�startovanja motora.
Metoda merenja nivoa stUXMH�XSRUH XMH�VWYDUQX�VWUXMX�PRWRUD�VD�QHNRP�SRGHãHQRP��Komutacija se dešava u trenutku kada se detektuje da je struja motora manja od podešene.
28
Kao i kod prethodne metode problem je start motora, odnosno rad pri malim
brzinama. Dok se ne dostigne neka miQLPDOQD� EU]LQD� NRMD� RPRJXüDYD� XVSHãDQ� UDG�DOJRULWPD�]D�GHWHNWRYDQMH�SRORåDMD��65�PRWRU�PRUD�GD�UDGL�X�RSHQ-ORRS�SHWOML�VD�SRYHüDQRP�YUHGQRãüX�DPSOLWXGH�VWUXMH�
Kod merenja brzine uspostavljanja struje meri se vreme koje je potrebno struji da bi
porasla za�XQDSUHG�RGUH HQX�NRQVWDQWQX�YUHGQRVW��'RELMHQR�YUHPH�VH�SRUHGL�VD�SRGHãHQLP�L QD�WDM�QDþLQ�VH�GHWHNWXMH�LQGXNWLYQRVW�ID]QRJ�QDPRWDMD��RGQRVQR��LQGLUHNWQR��SR]LFLMD� 2YDM�DOJRULWDP�QH�PRåH�GD�UDGL�]DMHGQR�VD�ORJLNRP�]D�NRQWUROX�XJOD�SUHGQMDþHQMD�

29
4.3 TopRORJLMH�SRJRQVNLK�SUHWYDUDþD�]D�NRQWUROX�65�PRWRUD
=ERJ�SURWLFDQMD�VWUXMH�NUR]�ID]X�VDPR�X� MHGQRP�VPHUX��NDR�L�PH XVREQH�HOHNWULþQH�L]RORYDQRVWL� ID]D��PRJXüH� MH� SULPHQLWL� YLãH� UD]OLþLWLK� NRQILJXUDFLMD� SRJRQVNLK� SUHWYDUDþD�� 6�RE]LURP� GD� SRJRQVNL� SUHWYDUDþL� ]QDWQR� XWLþX� QD� WURãNRYH� L]UDGH� SRJRQD�� YHOLNL� QDSRUL� VX�XORåHQL� X� FLOMX� UD]YLMDQMD� SUHWYDUDþD� ãWR� MHGQRVWDYQLMH� NRQILJXUDFLMH�� 1D� WURãNRYH� L]UDGH�SUHWYDUDþD� ]QDWQR� XWLþX� XNXSQH� YROW-DPSHUVNH� �9$�� NDUDNWHULVWLNH� SROXSURYRGQLþNLK�SUHNLGDþD�� EURM� SUHNLGDþD� u gornjem delu mosta, nivo prisutnosti pasivnih komponenti,
postojanje snaber kola (snubbers), senzora, kao i ukupan broj komponenti u sistemu. Pri
SURMHNWRYDQMX� SUHWYDUDþD� WDNR H MH� SRWUHEQR� YRGLWL� UDþXQD� R� SRX]GDQRVWL� L� NRQWUROQRM�fleksibilnosti. Što se WLþH� SRX]GDQRVWL�� ]ERJ� NRQVWUXNWLYQLK� RVRELQD� PRWRUD� L� QDþLQD�SREX LYDQMD� ID]D�� SUHWYDUDþL� VX� X� YHOLNRM� PHUL� WROHUDQWQL� QD� SRJUHãQD� VWDQMD� QD�NRPSRQHQWDPD�LOL�X�ID]L�PRWRUD��,SDN��SUHWYDUDþL�VD�UHGXNRYDQLP�EURMHP�SUHNLGDþD�VX�]QDWQR�manje tolerantni u poglHGX� SRJUHãQLK� VWDQMD�� SRãWR� LPDMX� PDQMH� PRJXüQRVWL� X� L]RODFLML�QHUHJXODUQLK� VWDQMD�� 1DMþHãüH� NRULãüHQH� NRQILJXUDFLMH� SUHWYDUDþD� VX, [10], [14]� �� NODVLþQL�SUHWYDUDþ�� ELILODUQL� SUHWYDUDþ�� SUHWYDUDþ� VD� NRQGHQ]DWRURP� VD� VUHGQMRP� WDþNRP��0LOOHU-ovo
kolo, C-dump�SUHWYDUDþ��6RRG-RY�SUHWYDUDþ�L�buck-boost�SUHWYDUDþ�
�������.ODVLþQL�SUHWYDUDþ
.ODVLþQL��PRVWQL��SUHWYDUDþ�SULND]DQ�MH�QD�VOLFL������7R� MH�RVQRYL� WLS�NROD�VD�NRMLP�VH�QDMþHãüH�SRUHGH�VYH�RVWDOH�NRQILJXUDFLMH��0RVWQR�NROR�NRULVWL�GYD�HQHUJHWVND�SUHNLGDþD po
ID]L� PRWRUD� L� GYH� GLRGH� NRMH� YUDüDMX� DNXPXOLVDQX� PDJQHWQX� HQHUJLMX� PRWRUD� L]YRUX�� 8�SURFHVX� PDJQHWL]DFLMH� XNOMXþXMX� VH� RED� SROXSURYRGQLþND� SUHNLGDþD�� þLPH� VH� GRYRGL� QD�krajeve faze napon napajanja U. Kada je potrebno izvršiti demagnetizaciju neophodno je
LVNOMXþLWL�RED�SUHNLGDþD��WDNR�GD�VWUXMD�SURWLþH�NUR]�GLRGH��D�QDSRQ�QD�NUDMHYLPD�ID]H�MH��U.
.DGD� VH� åHOL� SRVWLüL� PHNR� þRSRYDQMH� SRWUHEQR� MH� MHGDQ� SUHNLGDþ� LVNOMXþLWL� WDNR� GD� VWUXMD�FLUNXOLãH�NUR]�GUXJL�SUHNLGDþ�L�MHGQX�RG�GLRGD��þLPH�VH�RVWYDUXMH�SULEOLåQR�QXOWL�QDSRQ�QD�ID]L��

30
3 ~
Sl. 4.6. .ODVLþQL�SUHWYDUDþ�]D�WURID]QL�PRWRU.
.ODVLþQL�SUHWYDUDþ�LPD�QHNROLNR�SUHGQRVWL�X�RGQRVX�QD�VYD�RVWDOD�NROD��1DMYDåQLMD�MH�WD�ãWR�GYD�SUHNLGDþD�SR�ID]L�RPRJXüDYDMX�NRPSOHWQX�NRQWUROX�ID]D�X�bilo kom trenutku, bez
RE]LUD� QD� VWDQMH� X� RVWDOLP� ID]DPD�� 2YD� RVRELQD� MH� QDURþLWR� YDåQD� NDGD� VH� SULPHQMXMH�SUHNODSDQMH�X�SURYR HQMX�ID]D�UDGL�SRYHüDQH��SURGXNFLMH�PRPHQWD��'UXJD�YDåQD�SRJRGQRVW RYRJ�NROD�MH�ãWR��]DKYDOMXMXüL��VSRVREQRVWL�GD�REH]EHGL�VORERGno proticanje struje kroz fazu
]D� YUHPH� 3:0� UXWLQH�� RPRJXüDYD� VPDQMHQMH� SUHNLGDþNLK� JXELWDND� L� WDODVQH� VWUXMH� NUR]�NRQGHQ]DWRU�� D� L� GDOMH� ]DGUåDYD� PRJXüQRVW� EU]RJ� ]DXVWDYOMDQMD� VWUXMH� NUR]� ID]X� QD� NUDMX�LPSXOVD�� 7DNR H��PQRJH� ãHPH� ]D� LQGLUHNWQR� RGUH LYDQMH� SRORåDMD� URWRUD� ]DKWHYDMX�� X� FLOMX�ostvarenja maksimalnih performansi motora, kontrolnu fleksibilnost koju poseduje ovaj
SUHWYDUDþ��3ROXSURYRGQLþNL�SUHNLGDþL�NRG�NODVLþQRJ�SUHWYDUDþD�GRåLYOMDYDMX�QDMPDQML�PRJXüL�stres u pogledu napona i struje, što dopuštD GD� VH� NRULVWH� SUHNLGDþL� VD� PLQLPDOQLP�NDUDNWHULVWLNDPD� ]D� GDWX� VQDJX� SUHWYDUDþD�� 8NXSQH� YROW-amperske (VA) karakteristike N -
ID]QRJ� SUHWYDUDþD� L]QRVH� 2N�V�I� .ODVLþQL� SUHWYDUDþ� MH�� WDNR H�� QDMWROHUDQWQLML� X� SRJOHGX�pogrešnih stanja. Totalna nezavisnost ID]D� L� GYD� SUHNLGDþD� SR� ID]L�PRWRUD� REH]EH XMX� GD�SRJRQ�PRåH�QDVWDYLWL�VD�UDGRP��VD�VPDQMHQLP�SHUIRUPDQVDPD��X�VOXþDMX�SRJUHãQRJ�VWDQMD�bilo koje komponente ili faze motora.
*ODYQL� QHGRVWDWDN� RYRJ� SUHWYDUDþD� MH� ãWR� SRVHGXMH� GYD� SUHNLGDþD� SR� ID]L� PRWRUD��zDMHGQR�VD�QMLKRYLP�RNLGQLP�NROLPD��8�SRJRQLPD�VD�YHüLP�YUHGQRVWLPD�QDSRQD�QDSDMDQMD�PRUD� VH� YUãLWL� JDOYDQVNR� UD]GYDMDQMH� JRUQMLK� SUHNLGDþD� RG� NRQWUROQH� ORJLNH� SULPHQRP�RSWR�izolacije, impulsnih transformatora ili visokonaponskih integrisanih kola, što doprinosi
XVORåQMDYDQMX�SRJRQD�

31
�������3UHWYDUDþ�]D�PRWRU�VD�ELILODUQLP�QDPRWDMLPD
âHPD�RYRJ�SUHWYDUDþD�SULND]DQD� MH�QD�VOLFL������2Q�VDGUåL�VDPR� MHGDQ�SUHNLGDþ�SR�ID]L�L�PRåH�VH�XSRWUHELWL�X�VOXþDMX�NDGD�VX�ID]H�PRWRUD�VDþLQMHQH�RG�GYD��ELILODUQR�QDPRWDQD� QDPRWDMD��8�SURFHVX�PDJQHWL]DFLMH� SUHNLGDþ� MH� XNOMXþHQ� WDNR�GD� VH�QD� ID]X�GRYRGL� QDSRQ�QDSDMDQMD�� .DGD� WUHED� L]YUãLWL� GHPDJQHWL]DFLMX� LVNOMXþXMH� VH� SUHNLGDþ�� SD� YUHGQRVW� VWUXMH� X�JODYQRP�QDPRWDMX� SDGD� QD� QXOX�� GRN� VH� DNXPXOLVDQD� HQHUJLMD� YUDüD� L]YRUX� NUR]� SRPRüQL�QDPRWDM�L�GLRGX��2GQRV�QDYRMDND�JODYQRJ�L�SRPRüQRJ��ELILODUQRJ��QDPRWDMD�QDMþHãüH�MH������PDGD� MH�PRJXüH�NRULVWLWL� L� GUXJDþLML� RGQRV�NDGD�VX�QDSRQL�PDJQHWL]DFLMH� L�GHPDJQHWL]DFLMH�UD]OLþLWRJ�QLYRD�
3 ~
Sl. 4.7. 3UHWYDUDþ�]D�trofazni SR motor sa bifilarnim namotajima.
3UHGQRVWL� RYDNYRJ� SRJRQD� VX� ãWR� SUHWYDUDþ� VDGUåL� VDPR� MHGDQ� SUHNLGDþ� SR� ID]L�motora i što nema potrebe za galvanskim razdvajanjem kontrolne logike od visokog napona.
Primarni nedostatak ove konfiguracije je što NRULãüHQMH� ELILODUQLK� QDPRWDMD� UH]XOWXMH� YHüLP�JXELFLPD� X� PRWRUX�� SUL� þHPX� VH�� X� RGUH HQLP� VOXþDMHYLPD�� ]QDþDMQR� VPDQMXMH� HILNDVQRVW�VLVWHPD��3ROXSURYRGQLþNL�SUHNLGDþL�PRUDMX�ELWL�WDNYL�GD�SRGQRVH�VWUXMX�1�I i napon nešto viši
od 2.V (zbog neidealne magnetne uparenosti bifilarnih namotaja), pa su totalne volt-
DPSHUVNH� NDUDNWHULVWLNH� SULEOLåQR� 2N�V�I WM�� LVWH� NDR� NRG� NODVLþQRJ� SUHWYDUDþD�� 'RGDWQL�QHGRVWDWDN�RYRJ�NROD�MH�ãWR�VH�MHGDQ�NUDM�QDSDMDQMD�GLUHNWQR�YHåH�]D�ID]H�PRWRUD��WDNR�GD�X�VOXþDMX�NUDWNRJ�VSRMD�PRåH�GRüL�GR�WRWDOQRJ�XQLãWHQMD�VLVWHPD�

32
�������3UHWYDUDþ�VD��split" kondenzatorom
3UHWYDUDþ�VD��split" kondenzatorom prikazan je na slici 4.8. On predstavlja još jedan
SUHWYDUDþ�VD�VDPR�MHGQLP�SROXSURYRGQLþNLP�SUHNLGDþHP�SR�ID]L�PRWRUD��0DJQHWL]DFLMD faze
VH�YUãL�WDNR�ãWR�VH�DNWLYLUD�SUHNLGDþ�NRML�MH�X�VHULML�VD�QMRP��WDNR�GD�VH�QD�ID]X�GRYRGL�QDSRQ�V/2. Strujno kolo se zatvara kroz fazu i kroz kondenzator koji je u paralelnoj vezi sa njom.
.DGD�VH�SUHNLGDþ�LVNOMXþL�VWUXMD�NUR]�ID]X�QDVWDYOMD�GD�SURWLþH��DOL�VH�VDGD�VWUXMD�]DWYDUD�NUR]�GUXJL� NRQGHQ]DWRU� L� GLRGX�� SD� QDSRQ� QD� ID]L�� V� RE]LURP� GD� MH� QDSRQ� X� ]DMHGQLþNRM� WDþNL�kondenzatora V/2, iznosi �V/2� 0DNVLPDOQL�QDSRQ�QD�SUHNLGDþLPD�MH�V� ,PDMXüL�X�YLGX�GD�MH�napon magnetizacije na krajevima faza V/2, za ostvarivanje iste moment-brzina
NDUDNWHULVWLNH�X�SRUH HQMX�VD�GUXJLP�SUHWYDUDþLPD��QHRSKRGQR�MH�GD�VWUXMD�GRVWLåH�YUHGQRVW�2.I i da faze imaju dva puta manji broj navojaka. Odavde sledi da ukupne VA karakteristike
SUHWYDUDþD�L]QRVH�N.V.2.I=2N�V�I.
3 ~
Sl. 4.8. 3UHWYDUDþ�VD��VSOLW��NRQGHQ]DWRURP��WURID]QL��
1DVXSURW�SUHGQRVWL�X�PDORP�EURMX�SUHNLGDþD�SUHWYDUDþ�VD��split" kondenzatorom ima
QL]� QHGRVWDWDND�� .DR� SUYR�� RYDM� SUHWYDUDþ� VH�PRåH� NRULVWLWL� VDPR� ]D� QDSDMDQMH�PRWRUD� VD�parnim brojem faza. Struja u namotajima mora biti dobro izbalansirana da bi se izbeglo
SRYHüDQMH�LOL�VPDQMHQMH�QDSRQD�X�]DMHGQLþNRM�WDþNL�NRQGHQ]DWRUD��7DNR H��V�RE]LURP�GD�VH�struja faza uvek zatvara kroz kondenzatore, postoji problem upotrebe kondenzatora sa
visokim karakteristikama u pogledu talasnosti struje. Još jedan nedostatak ove konfiguracije
MH�ãWR�QH�SRGUåDYD�NRULãüHQMH�PHNH�QDSRQVNH�3:0��NDR�QL�PHNH�VWUXMQH�UHJXODFLMH�
33
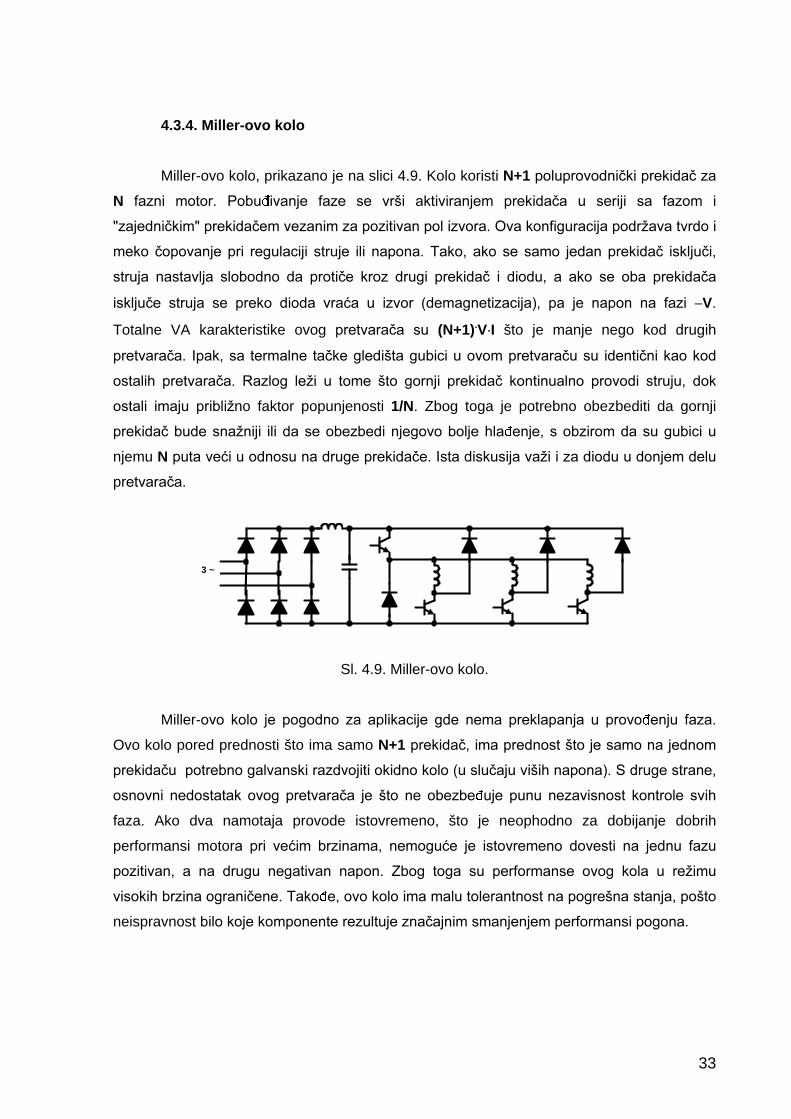
4.3.4. Miller-ovo kolo
Miller-ovo kolo, prikazano je na slici 4.9. Kolo koristi N+1�SROXSURYRGQLþNL�SUHNLGDþ�]D�N ID]QL� PRWRU�� 3REX LYDQMH� ID]H� VH� YUãL� DNWLYLUDQMHP� SUHNLGDþD� X� VHULML� VD� ID]RP� L��]DMHGQLþNLP��SUHNLGDþHP�YH]DQLP�]D�SR]LWLYDQ�SRO�L]YRUD��2YD�NRQILJXUDFLMD�SRGUåDYD�WYUGR�L�PHNR� þRSRYDQMH�SUL� UHJXODFLML� VWUXMH� LOL� QDSRQD��7DNR�� DNR�VH� VDPR� MHGDQ�SUHNLGDþ� LVNOMXþL��VWUXMD� QDVWDYOMD� VORERGQR� GD� SURWLþH� NUR]� GUXJL� SUHNLGDþ� L� GLRGX�� D� DNR� VH� RED� SUHNLGDþD�LVNOMXþH� VWUXMD� VH� SUHNR� GLRGD� YUDüD� X� L]YRU� �GHPDJQHWL]DFLMD��� SD� MH� QDSRQ� QD� ID]L� �V.
Totalne VA karakteristike ovog� SUHWYDUDþD� VX� (N+1).V�I što je manje nego kod drugih
SUHWYDUDþD�� ,SDN��VD� WHUPDOQH� WDþNH�JOHGLãWD�JXELFL�X�RYRP�SUHWYDUDþX�VX� LGHQWLþQL�NDR�NRG�RVWDOLK� SUHWYDUDþD�� 5D]ORJ� OHåL� X� WRPH� ãWR� JRUQML� SUHNLGDþ� NRQWLQXDOQR� SURYRGL� VWUXMX�� GRN�RVWDOL� LPDMX� SULEOLåno faktor popunjenosti 1/N. Zbog toga je potrebno obezbediti da gornji
SUHNLGDþ�EXGH�VQDåQLML� LOL�GD�VH�REH]EHGL�QMHJRYR�EROMH�KOD HQMH��V�RE]LURP�GD�VX�JXELFL�X�njemu N SXWD�YHüL�X�RGQRVX�QD�GUXJH�SUHNLGDþH��,VWD�GLVNXVLMD�YDåL�L�]D�GLRGX�X�GRQMHP�GHOX�prHWYDUDþD�
3 ~
Sl. 4.9. Miller-ovo kolo.
Miller-RYR� NROR� MH� SRJRGQR� ]D� DSOLNDFLMH� JGH� QHPD� SUHNODSDQMD� X� SURYR HQMX� ID]D��Ovo kolo pored prednosti što ima samo N+1�SUHNLGDþ��LPD�SUHGQRVW�ãWR�MH�VDPR�QD�MHGQRP�SUHNLGDþX��SRWUHEQR�JDOYDQVNL�UD]GYRMLWL�RNLGQR�NROR��X�VOXþDMX�YLãLK�QDSRQD���6�GUXJH�VWUDQH��RVQRYQL� QHGRVWDWDN� RYRJ� SUHWYDUDþD� MH� ãWR� QH� REH]EH XMH� SXQX� QH]DYLVQRVW� NRQWUROH� VYLK�faza. Ako dva namotaja provode istovremeno, što je neophodno za dobijanje dobrih
performansi motorD SUL� YHüLP� EU]LQDPD�� QHPRJXüH� MH� LVWRYUHPHQR� GRYHVWL� QD� MHGQX� ID]X�SR]LWLYDQ�� D� QD� GUXJX� QHJDWLYDQ� QDSRQ�� =ERJ� WRJD� VX� SHUIRUPDQVH� RYRJ� NROD� X� UHåLPX�YLVRNLK�EU]LQD�RJUDQLþHQH��7DNR H��RYR�NROR�LPD�PDOX�WROHUDQWQRVW�QD�SRJUHãQD�VWDQMD��SRãWR�neispravnost ELOR�NRMH�NRPSRQHQWH�UH]XOWXMH�]QDþDMQLP�VPDQMHQMHP�SHUIRUPDQVL�SRJRQD�

34
4.3.5. C-GXPS�SUHWYDUDþ
C-dump�SUHWYDUDþ�SULND]DQ�MH�QD�VOLFL�������8�QMHPX�VH�NRULVWL�MHGDQ�SUHNLGDþ�SR�ID]L�PRWRUD�� X]� GRGDWQL� SUHNLGDþ�� NRQGHQ]DWRU� L� NDOHP� NRML� VOXåH� ]D� YUDüDQMH akumulisane
PDJQHWQH� HQHUJLMH� QD]DG� X� MHGQRVPHUQL� L]YRU�� 3R� SULQFLSX� UDGD� NROR� MH� VOLþQR� ELILODUQRP�SUHWYDUDþX�� V� WRP� UD]OLNRP� ãWR� VH� DNXPXOLVDQD� PDJQHWQD� HQHUJLMD� QH� YUDüD� SRPRüX�ELILODUQRJ� QDPRWDMD�� YHü� VH� YUDüD� X]� SRPRü� GRGDWQRJ� NRQGHQ]DWRUD�� SUHNLGDþD, diode i
NDOHPD��1DSRQ�QD�NRQGHQ]DWRUX�LPD�YHüX�YUHGQRVW�RG�QDSRQD�QDSDMDQMD��D�QMHJRY�QLYR�VH�NRQWUROLãH�DNWLYLUDQMHP�GRGDWQRJ�SUHNLGDþD�� WDNR�GD�VH�YLãDN�HQHUJLMH��SUHNR�NDOHPD��YUDüD�izvoru.
8 SRUH HQMX�VD�NODVLþQLP�SUHWYDUDþHP�C-dump kolo koristi manML�EURM�SUHNLGDþD��N+1)
od kojih je samo za jedan, eventualno, potrebno vršiti galvansko razdvajanje okidnog kola.
3R]LWLYQD� RVRELQD� RYRJ� NROD� MH� VSRVREQRVW� UDGD� X� XVORYLPD� SUHNODSDQMD� XJOD� SURYR HQMD�faza. Totalne VA karakteristike ovog kola zavise od velLþLQH� QDSRQD�Vc na kondenzatoru i
struje Ichop kroz dodatni tranzistor. Totalne VA karakteristike za dati napon Vc iznose: N.Vc.I +
Vc.Ichop. S obzirom da se napon Vc QDMþHãüH�ELUD�X�RSVHJX� (1.5 - 2).V PRåH�VH�UHüL�GD�VX�
WRWDOQH�9$�NDUDNWHULVWLNH�SULEOLåno 2N.V.I.
3 ~
Vc
+
�
Sl. 4.10. C-GXPS�SUHWYDUDþ.
Kondenzator u C-dump�NROX�MH�L]ORåHQ�]QDWQRP�RSWHUHüHQMX�X�YLGX�WDODVQH�VWUXMH��ãWR�MH�QDURþLWR� L]UDåHQR�NDGD�VH� UDGL�R�JHQHUDWRUVNRP�VLVWHPX� LOL� VLVWHPX�NRML� UDGL�X�VYD�þHWLUL�kvadranta. Kroz ovaj kondenzator i kalem javljaju se dodatni gubici koji nisu prisutni kod
RVWDOLK� NRQILJXUDFLMD�� ãWR� þLQL�C-dump� NROR�PDQMH� HILNDVQLP� RG� GUXJLK�� 7DNR H�� ]ERJ� GHOD�NROD�NRMH�VOXåL�]D�YUDüDQMH�HQHUJLMH� L]YRUX��RYDM�SUHWYDUDþ� MH�PDQMH�SRX]GDQ�� MHU�NYDURvi na
NRQGHQ]DWRUX��GRGDWQRP�SUHNLGDþX�LOL�NDOHPX�GRYRGH�GR�WRWDOQRJ�NYDUD�VLVWHPD�

35
4.3.6. Buck-boost�SUHWYDUDþ
Buck-boost SUHWYDUDþ�SULND]DQ�MH�QD�VOLFL�������7R�MH�MRã�MHGDQ�SUHWYDUDþ�VD��N+1)-nim
SROXSURYRGQLþNLP� SUHNLGDþHP�� 2Q� QXGL� GRGDWQX� IOHNVLELOnost u kontroli motora, jer su
podeljeni naponi magnetizacije Vc2 i demagnetizacije Vc1. Magnetizacija se vrši kada se
XNOMXþL� SUHNLGDþ� NRML� MH� QD� UHG� VD� ID]RP�� D� NDGD� MH� SUHNLGDþ� LVNOMXþHQ� QDVWDMH� SURFHV�demagnetizacije. Napon na kondenzatoru C1 podešava VH�SRPRüX�SUHNLGDþD�X�JRUQMHP�GHOX�kola, induktivnosti i diode u vidu buck-boost�þRSHUD��
3 ~ C1
C2
Sl. 4.11. Buck-ERRVW�SUHWYDUDþ.
Glavne prednosti buck-boost�SUHWYDUDþD�VX�ãWR�GR]YROMDYD�IOHNVLELOQRVW�X�NRQWUROL�L�ãWR�SRVWRML�PRJXüQRVW�podešavanja napona magnetizacije Vc2� þLPH�VH�L]EHJDYD�XSRWUHED�3:0�NRQWUROH�QD�GRQMLP�SUHNLGDþLPD�L�QH]DYLVQRVW��X�NRQWUROL��ID]D��0DQH�VX�PX�SRYHüDQH�XNXSQH�VA karakteristike ( za Vc1=Vc2 =V najmanje 2.(N+1).V.I ), neophodnost da ulazna snaga
cirkuliše kUR]�þRSHU��NDR�L�YHOLNL�EURM�SDVLYQLK�NRPSRQHQWL�

36
4.3.7. Sood-RY SUHWYDUDþ
Sood-RY� SUHWYDUDþ� SULND]DQ� MH� QD� VOLFL� ������ 1MHJRYD� RVQRYQD� NDUDNWHULVWLND� MH�HOLPLQDFLMD� XOD]QRJ� /&� ILOWUD�� ,DNR� MH� RYR� NROR� YHRPD� VOLþQR� &-dump i buck-boost
SUHWYDUDþLPD��SULQFLS� UDGD� MH�SRWSXQR�GUXJDþLML��0DJQHWL]DFLMX� MH�PRJXüH�YUãLWL� XNOMXþHQMHP�SUHNLGDþD�QD�UHG�VD�ID]RP��X�WRP�VOXþDMX�MH�QDSRQ�PDJQHWL]DFLMH�MHGQDN�WUHQXWQRM�YUHGQRVWL�nefiltriranog ispravljenog napona Vr� 7DNR H��PDJQHWL]DFLMX� MH�PRJXüH�YUãLWL�NDGD�VH�XNOMXþi
LVWRYUHPHQR� L� SRPRüQL� SUHNLGDþ�� X� RYRP� VOXþDMX� MH� QDSRQ� QD� ID]L� MHGQDN� QDSRQX� QD�kondenzatoru Vc (Vc>Vr). Ako je Vc<Vr PDJQHWL]DFLMD�VH�YUãL� NDR�X�SUHWKRGQRP�VOXþDMX�VD�naponom Vr� .DGD� MH� XNOMXþHQ� VDPR� GRGDWQL� WUDQ]LVWRU� IRUPLUD� VH� NRQWXUD� VD� VORERGQRP�FLUNXODFLMRP�VWUXMH��$NR�VX�SUHNLGDþL�LVNOMXþHQL�DNXPXOLVDQD�PDJQHWQD�HQHUJLMD�VH�SUHEDFL�X�NRQGHQ]DWRU��SUL�þHPX�MH�QDSRQ�GHPDJQHWL]DFLMH��Vc� 7LSLþQD�PLQLPDOQD�YUHGQRVW�QDSRQD�Vc
je Vcmin=2.27�V, gdje je V amplituda ulaznog napona. Zbog toga je minimalna totalna VA
NDUDNWHULVWLND�X�LGHDOQRP�VOXþDMX�2.27.(N+1).I.V.
Glavne prednosti Sood-RYRJ� SUHWYDUDþD� VX� ãWR� REH]EH XMH� PLQLPDODQ� EURM�NRPSRQHQWL� L� ãWR� RPRJXüDYD� SULPHQX�PHNRJ� L� WYUGRJ� þRSRYDQMD� X� NRQWUROL�� 0DQH� VX�PX��YLVRNH�9$�NDUDNWHULVWLNH�� QHPRJXüQRVW�vršenja magnetizacije naponom Vc za vreme celog
XJOD�SURYR HQMD�L�SRVWRMDQMH�SUREOHPD�YH]DQLK�]D�YLãH�KDUPRQLNH�
3 ~
Sl. 4.12. Sood-RY�SUHWYDUDþ

37
5. Simulacija SR motora
.DR�ãWR�MH�YHü�UHþHQR�VDVWDYQL�GHR�RYRJ�diplomskog je i simulacija rada SR motora
XUD HQD� X� SURJUDPVNRP� SDNHWX� Matlab/Simulink v6.5. Cilj simulacije je dobijanje
RGJRYDUDMXüLK� WDODVQLK�REOLND�]D� LQGXNWLYQRVW��QDSRQ��VWUXMX� L�PRPHQW��0RGHO�65�PRWRUD� MH�PDNVLPDOQR�XSURãüHQ��6WUXMD�PRWRUD�VH�GRELMD�QD�RVQRYX�MHGQDþLQH:
∫
+⋅−= dt
dt
dLRiu
L
1i (5.1)
.DGD�MH�SR]QDWD�VWUXMD��PRPHQW�VH�UDþXQD�QD�RVQRYX�MHGQDþLQH�(3.27).
Promena induktivnosti u zavisnosti od SRORåDMD�URWRUD je pisana funkcija i importovana
X VLPXODFLMX�� 7DNR H�� QDSRQL� PDJQHWL]DFLMH� L� GHPDJQHWL]DFLMH� VX� pisane funkcije koje se
pozivaju iz simulacije (U_theta_1.m). Kodovi obe funkcije su dati u prilogu.
3RUHG�SLVDQLK�IXQNFLMD��RVWDWDN�PRGHOD�MH�QDþLQMHQ�SRPRüX�VWDQGDUGQLK�HOHPHQDWD�L]�biblioteke Simulink.
Simulacija se startuje izvršavanjem inicijalnog koda napisanog u datoteci
SRM_1start.m� 1D�RYDM�QDþLQ�VH�X�PHPRULMVNL�SURVWRU�Matlab-a XþLWDYDMX�SDUDPHWUL�PRWRUD�L SRþHWQD� YUHGQRVW� EU]LQH�� 2YLP� SXWHP� VH� GHILQLãH� L� XJDR� PDJQHWL]DFLMH�� NDR� L� XJDR�SUHGQMDþHQMD�
Pored osnovnih rezultata simulacije, koje predstavljaju talasni oblici induktivnosti,
QDSRQD��VWUXMH�L�PRPHQWD��GRVWXSQL�VX�L�QXPHULþNL�SRGDFL�]D�VUHGQML�PRPHQW�X�MHGQRM�SHULRGL�NRPXWDFLMH� L� HIHNWLYQX� YUHGQRVW� VWUXMH�� NDR� L� QMLKRY� NROLþQLN� U radu, [15], je detaljno, na
velikom broju primera analizirDQ� NROLþQLN�PRPHQW-VWUXMD�� ]D� UD]OLþLWH� XJORYH�PDJQHWL]DFLMH� L�UD]OLþLWH�ãLULQH�QDSRQVNLK�LPSXOVD�

38
5.1 Rezultati simulacije
Naredni grafici prikazuju rezultate simulacije pri uglu magnetizacije od 22° i uglu
SUHGQMDþHQMD�RG��°. Parametri motora se mogX SURþLWDWL�L]�LQLFLMDOQH�GDWRWHNH�SRM_1start.m,
koja je data u prilogu.
Sl. 5.1 Talasni oblici induktivnosti, napona i struje

39
Sl. 5.2 Talasni oblik momenta

40
Kod datoteke SRM_1start.m
% Podaci za SRM_1
clear;
global Lmax Lmin t1 t2 t3 t4 k betar betas Ub Ud R tm td ThM ThD ThE tm1 tm2 tm3 tm4
prenosnik
% PARAMETRI
%Lmag=0.048; % Aksijalna duzina mag. kola
%Rrs=0.0185; % Manji poluprecnik rotora
%Rrl=0.029; % Veci poluprecnik rotora
%Rss=0.047; % Manji poluprecnik statora
%Rsl=0.058; % Veci poluprecnik statora
%delta=0.5e-3; % Vazdusni procep
%Nr=4; % br. polova rotora
%Ns=6; % br. polova statora
%N=580; % br. navojaka po fazi
R=6.9; % Otpornost faze
Ud=200; % Direktni napon
Ub=-200; % Napon demagnetizacije
% Sirina statorskog i rotorskog pola
betar=30; %*pi/180; % ugao pola rotora
betas=22; %*pi/180; % ugao pola statora
%T=pi/2;
Lmax=91E-3;
Lmin=7.1E-3;
% Uglovi [stepeni] preklapanja statorskog i rotorskog pola
t1=90-(betar+betas)/2;

41
t2=90-(betar-betas)/2;
t3=90+(betar-betas)/2;
t4=90+(betar+betas)/2;
n=1500;
w=2*pi*n/60;
prenosnik=(n/60)*360; %[stepeni/sec]
% Vremena [sec.] preklapanja statorskog i rotorskog pola
tm1=t1/prenosnik;
tm2=t2/prenosnik;
tm3=t3/prenosnik;
tm4=t4/prenosnik;
k=(Lmax-Lmin)/(tm2-tm1);
% Ugao prednjacenja
%
% Iset=17;
% ThADV=(Lmin*Iset*(2*pi*n/60)/Ud);
% Uglovi magnetizacije i demagnetizacije
ThI=22; % Trajanje impulsa magnetizacije /u stepenim/
ThP=6; % Ugao prednjacenja
ThM=t1-ThP;
ThD=ThM+ThI;
ThE=t3; % U ovoj varijanti simulacije se ne koristi
% Vremenski trenuci magnetizacije i demagnetizacije
tm=ThM/prenosnik;
td=ThD/prenosnik;
open_system(’SRM_1.mdl’);

42
Kod datoteke U_theta_1.m
% funkcija U od theta
function U=U_theta(theta)
global Ud Ub ThM ThD ThE
if (theta>=ThM)&(theta<=ThD)
U=Ud;
elseif (theta>ThD)&(theta<ThE)
U=Ub;
else
U=Ub;
end
end
Kod datoteke L_theta.m
%funkcija L od theta
function L=L_th(theta)
global Lmax Lmin t1 t2 t3 t4 k prenosnik tm1 tm2 tm3 tm4
if (theta>=t1)&(theta<t2)
L=Lmin+k*(theta/prenosnik-tm1);
elseif (theta>=t2)&(theta<t3)
L=Lmax;
elseif (theta>=t3)&(theta<t4)
L=Lmax-k*(theta/prenosnik-tm3);
else
L=Lmin;
end
end

43
Sl. 5.3 Izgled modela po blokovima

44
Sl. 5.4 Blok el. sistem

45
Sl. 5.5 Blok mehaniþki sistem

46
6. =DNOMXþDN
3ULQFLS�UDGD�SUHNLGDþNRJ�UHOXNWDQWQRJ�PRWRUD� MH�SR]QDW�SUHNR�����JRGLQD��PH XWLP�WHN� QDJOLP� UD]YRMHP� SROXSURYRGQLþNLK� NRPSRQHQWL� 65� PRWRU� GRELMD� VYRMX� ãDQVX� ]D�UDYQRSUDYQX�ERUEX�X� VYHWX�HOHNWURPRWRUQLK� SRJRQD��8� WRM� ERUEL�PQRJH� þLQMHQLFH� LGX�PX�X�korist� SRþHYãL�RG� MHGQRVWDYQH�NRQVWUXNFLMH� L�QLVNH�FHQH��SD�GR� MHGQRVWDYQLK�DOJRULtama za
XSUDYOMDQMH� L� HNRQRPLþQRVWL� UDGD�� 0H XWLP�� L� GDOMH� SRVWRML� SURVWRU� ]D� SREROMãDQMH� UDGQLK�NDUDNWHULVWLND�� ]D� VPDQMHQMH� EXNH�� SXOVDFLMH� PRPHQWD� L� RWNULYDQMH� QRYLK� XSUDYOMDþNLK�DOJRULWDPD� VD� PDQMLP� EURMHP� VHQ]RUD� L� SRYHüDQRP� SRX]GDQRãüX�� =ERJ� VYHJD� RYog SR
motor, njegova konstrukcija i algoritmi upravljanja predstavljaju plodan teren za otkrivanje
QRYRJ�L�XQDSUH HQMH�VWDURJ�
Osnovna karakteristika SR motora je velika varijacija induktivnosti, odnosno
PDJQHWQH� UHOXNWDQVH��VD�SURPHQRP�SRORåDMD� URWRUD��OYD�YDULMDFLMD� LGQXNWLYQRVWL� VH�SRVWLåH�VSHFLILþQRP�NRQVWUXNFLMRP�VD�LVWDNQXWLP�SRORYLPD�L�RGJRYDUDMXüRP�UDVSRGHORP�ID]D��NDR�ãWR�MH� UHþHQR� X�glavi br. 2� %URM� SRORYD� L� ID]D�PRWRUD� ]DYLVL� RG� DSOLNDFLMH� X� NRMRM� üH� VH�PRWRU�SULPHQMLYDWL�� WDNR� GD� YDåL� JHQHUDOQo pravilo da se manji broj polova primenjuje ukoliko se
]DKWHYDMX�YHOLNH�EU]LQH��D�YHüL�SUL�SRWUHEDPD�]D�YHOLNLP�PRPHQWRP�
7UHQXWQD�YUHGQRVW�PRPHQWD�MH�L]YHGHQD�QD�GYD�QDþLQD��SRPRüX�HQHUJHWVNRJ�ELODQVD�HOHNWURPHKDQLþNRJ� SUHWYDUDQMD� HQHUJLMH� L� SRPRüX� YDULjacije magnetnog otpora, reluktanse.
Ovim putem su dobijeni izrazi za moment kao funkcije magnetne energije (3.16) i koenergije
��������D�X�GUXJRP�VOXþDMX�NDR�IXQNFLMD�SURPHQH�UHOXNWDQVH��RGQRVQR�LGQXNWLYQRVWL�������� 2YH�MHGQDþLQH�]DMHGQR�VD�MHGQDþLQRP���.28) u potpunosti definišu dinamiku SR motora.
8 þHWYUWRM�JODYL�VX�RSLVDQL�DOJRULWPL�XSUDYOMDQMD�65�PRWRUP��3RND]DQR�MH�GD�65�PRWRU�ima dve kontrolne promenjive više u odnosu na ostale elektromotore. Te dve promenjive su
XJDR�XNOMXþHQMD�ID]H� i XJDR�SURYR enja faze. Na spoljnoj karakteristici SR motora mogu se
XRþLWL� WUL� UD]OLþLWH� REODVWL�� 6YDND� RG� RYLK� REODVWL� LPD� VYRMH� VSHFLILþQRVWL�� NRMH� GHILQLãX�RGJRYDUDMXüL�DOJRULWDP�XSUDYOMDQMD��7DNR��SUYD�REODVW�MH�REODVW�NRQVWDQWQRJ�PRPHQWD�L�]D�QMX�MH� NDUDNWHULVWLþQR� RJUDQLþDYDQMH� VWUXMH�� GRN� VX� XJORYL� PDJQHWL]DFLMH� L� GHPDJQHWL]DFLMH�NRQVWDQWQL��'UXJD�REODVW�MH�REODVW�NRQVWDQWQH�VQDJH�L�]D�QMX�MH�NDUDNWHULVWLþQD�SURPHQD�XJOD�SURYR HQMD�� GRN� QHPD� SRWUHEH� ]D� RJUDQLþDYDQMHP� VWUXMH�� 7UHüD� REODVW� SUHGVWDYOMD� REODVW�

47
priroGQH� NDUDNWHULVWLNH� L� ]D� QMX� MH� NDUDNWHULVWLþQR� GD� MH� XJDR�PDJQHWL]DFLMH� GRVWLJDR� VYRMX�maksimalnu vrednost, a moment opada sa kvadratom brzine.
Od algoritama za upravljanje SR motorom, opisana je strujna i naponska regulacija.
5HþHQR� MH� GD� VH� VWUXMQD� UHJXODFLMD� NRULVWL� X� VRILVWLFLUDQLMLP� SRJRQLPD� L� GD� VH� QMRP� SRVWLåH�precizna kontrola momenta, dok je naponska regulacija jeftinija, jednostavnija i njome se
upravljaju brzinski servo pogoni.
8 REODVWL� NRQVWDQWH� VQDJH� MH� RG� VXãWLQVNH� YDåQRVWL� YDOMDQR� SURFHQLWL� ugao
SUHGQMDþHQMD� VWUXMQRJ� LPSXOVD�� -HGQDþLQRP� ������ MH� SRND]DQR� NDNR� VH� MHGQRVWDYQR�PRåH�GRüL�do åHOMHQRJ�XJOD�SUHGQMDþHQMD��GRN�MH�QD�VOLFL�EU������SULND]DQD�SULQFLSVND�ãHPD�MHGQRJ�UHJXODWRUD�XJOD�SURYR HQMD�
Poslednjih godina vlada trend da se konstruiãX� SRJRQL� EH]� GDYDþD� SR]LFLMH�� Ovaj
WUHQG�QLMH�]DRELãDR�QL�65�PRWRU��QDSURWLY��SRND]DOR�VH�GD� MH�RQ��XVOHG�VYRMLK�VSHFLILþQRVWL��veoma pogodan za ovaj vid regulacije. Razvijeni su brojni sensorless algoritmi koji vrše
estimaciju pozicije, odnosno brzine i QD�WDM�QDþLQ�XSUDYOMDMX�65�PRWRURP��8�SRJODYOMX��������opisani su osnovni principi tehnike Observera, aktivnog i pasivnog merenja impedanse
(induktivnosti).�1L�MHGQD�RG�WHKQLND�QLMH�VDYUãHQD�L�QH�UHWNR�VH�VUHüX�VOXþDMHYL�SULPHQH�GYH�LOL�više tehnika.
PoglDYOMH�����VDGUåL�SUHJOHG�GR�VDGD�UD]YLMHQLK�SUHWYDUDþD�NRML�NDR�VYRM�L]YUãQL�RUJDQ�imaju SR motor. Mora se priznati da se .ODVLþQL�SUHWYDUDþ�L�GDOMH�QDMþHãüH�VUHüH�X�SUDNVL.
U petom poglavlju je ukratko opisana simulacija SR motora i predstavljeni rezultati
simulacije.
48
7. Literatura
[1] 6�� 1�� 9XNRVDYLü�� �Controlled Electrical Drives – Status Of Technology", School of
Electrical Engineering, Unirvesity of Belgrade, 1998.
[2] P. J. Lawrenson, "Synthesis and performance of improved reluctance motors," in
Proceedings of the international conference on electrical machines, pp. C3-1 - C3-10,
London, 1974.
[3] 3�� -�� /DZUHQVRQ�� -��0�� 6WHSKHQVRQ�� 3�� 7�� %OHQNLQVRS�� -��ýRUGD�� DQG�1��1�� )XOWRQ��"Variable speed switched reluctance motors," IEE Proc., vol. 127, Pt. B, no. 4, pp.
253-365, July 1980.
[4] -��0��6WHSKHQVRQ�DQG�-��ýRUGD���&RPSXWDWLRQ�RI�WRUTXH�DQG�FXUUHQW�LQ�GRXEO\�VDOLHQW�reluctance motors from nonlinear magnetisation data," Proc. IEE, vol. 126, no. 5, pp.
393-396, 1979.
[5] -�� ýRUGD� DQG� -�� 0�� 6WHSKHQVRQ, "An analytical estimation of the minimum and
maximum inductances of a double-salient motor," in Proceedings of the international
conference on stepping motors and systems, pp. 50-59, Leeds, 1979.
[6] -�� ýRUGD�� �6ZLWFKHG� UHOXFWDQFH�PDFKLQH� DV� D� YDULDEOH-speed drive," Ph. D. thesis,
University of Leeds, 1979.
[7] H. Bausch and B. Rieke, "Speed and torque control of thyristor-fed reluctance
motors," in Proceedings of the international conference on electrical machines, Part I,
pp. 128-1 - 128-10, Vienna, 1976.
[8] H. Bausch and B. Rieke, "Performance of tyristor-fed electric car reluctance
machines," in Proceedings of the international conference on electrical machines, pp.
E4/2-1 - E4/2-10, Brussels, 1978.
[9] J. V. Byrne, "Characteristics of saturable stepper and reluctance motors," in 'Small
electrical machines', IEE Conf. Publ. no. 136, pp. 93-96, 1976.
[10] S. R. MacMinn, "Control of Switched Reluctanse Machine", GE Corporate Research
& Development, 1990.

49
[11] G. Holling, "Theory of SR Motor Operation", Rocky Mountain Technologies, 2002.
[12] W. D. Harris and J. H. Lang, "A Simple Motion Estimator for Switched Reluctance
Motors," Proceedings of the IEEE-IAS Annual Meeting, Pittsburgh, PA, October,
1988.
[13] A. Lumsdaine, J. H. Lang, and M. J. Balas, "A State Observer for Variable Reluctance
Motors: Analysis and Experiments," in Proceedings of the 19th Asilomar Conference
on Circuits, Systems and Computers, Pacific Grove, Ca, November 6-8, 1985.
[14] S. N.� 9XNRVDYLü� DQG� 9�� 5�� 6WHIDQRYLü�� �650� LQYHUWHr topologies: a comparative
evaluation," IEEE Trans. Ind. Appl., vol. 27, no. 6, pp. 1034-1047, Nov./Dec. 1991.
[15] N. Uzelac, "Optimizacija rada prekidDþNRJ� UHOXNWDQWQRJ� PRWRUD� ]DVQRYDQD� QD�UDþXQDUVNLP�VLPXODFLMDPD���GLSORPVNL�UDG��(7)�%HRJUDG�������

50
6$'5ä$-
6$ä(7$. 1.
1. Uvod 2.
2. Osobine SR motora 5.
���2GUH LYDQMH�WUHQXWQH�YUHGQRVWL�PRPHQWD 9.
����(QHUJHWVNL�ELODQV�HOHNWURPHKDQLþNRJ�SUHWYDUDQMD�HQ� 9.
3.2 Obrtni moment kao posledica promene magnetnog otpora 13.
4. Kontrola SR motora 17.
4.1 Spoljna karakteristika 17.
4.2 Algoritmi za upravljanje SR motorom 19.
������$OJRULWPL�EH]�GDYDþD�SR]LFLMH 25.
����7RSRORJLMH�SRJRQVNLK�SUHWYDUDþD�]D�NRQWUROX�65�PRWRUD 29.
������.ODVLþQL�SUHWYDUDþ 29.
������3UHWYDUDþ�]D�PRWRU�VD�ELILlarnim namotajima 31.
������3UHWYDUDþ�VD��split" kondenzatorom 32.
4.3.4 Miller-ovo kolo 33.
4.3.5 C-GXPS�SUHWYDUDþ 34.
4.3.6 Buck-ERRVW�SUHWYDUDþ 35.
4.3.7 Sood-RY�SUHWYDUDþ 36.
5. Simulacija SR motora 37.
5.1 Rezultati simulacije 38.
���=DNOMXþDN 46.
7. Literatura 48.

















![Pokušaj u hrvatskom kaznenom pravu [3,48 MiB]](https://img.dokumen.tips/doc/110x75/586696d91a28abcd3f8b83d4/pokusaj-u-hrvatskom-kaznenom-pravu-348-mib.jpg)











