Embed Size (px)
Citation preview

ИНИСТАРСТВО ОДБРАНЕ
УНИВЕРЗИТЕТ ОДБРАНЕ
ВОЈНА АКАДЕМИЈА
ДИПЛОМСКИ РАД
ТЕМА: СИМУЛАЦИОНИ МОДЕЛ СИСТЕМА ЕЛАСТИЧНОГ
ОСЛАЊАЊА БРЗОХОДНОГ ГУСЕНИЧНОГ ВОЗИЛА
Кадет: Ментор:
старији водник прве класе потпуковник др
Лука Понорац Славко Муждека, дипл. инж.
Београд, август 2015. године

Завршни рад
2
САДРЖАЈ УВОД ............................................................................................................................................... 3
1. Опис конструкције разматраног система еластичног ослањања ....................................... 4
1.1. Елементи за вођење точкова .............................................................................................. 4
1.2. Еластични ослонци .............................................................................................................. 6
1.3. Пригушни елементи ............................................................................................................ 9
2. Моделирање елемената система еластичног ослањања ................................................... 10
2.1. Моделирање геометрије елемената ослањања и основних подсклопова .................... 11
2.1.1. Лактаста осовина ........................................................................................................ 11
2.1.2. Кућиште лактасте осовине ........................................................................................ 13
2.1.3. Торзиони штап ............................................................................................................ 16
2.1.4. Потпорни точак .......................................................................................................... 16
2.2. Моделирање склопова ...................................................................................................... 19
2.2.1. Моделирање везе лактасте осовине са склопом кућишта ...................................... 19
2.2.2. Моделирање везе потпорног точка са рукавцем лактасте осовине ....................... 20
2.2.3. Моделирање склопа возила ....................................................................................... 22
3. СИМУЛАЦИЈА ДИНАМИЧКОГ ПОНАШАЊА СИСТЕМА ЕЛАСТИЧНОГ
ОСЛАЊАЊА ................................................................................................................................ 24
3.1. Дефинисање положаја и веза 3Д модела и подлоге ....................................................... 24
3.2. Симулација ослањања возила на подлогу ....................................................................... 26
3.2. Анализа напонских стања лактасте осовине .................................................................. 31
4. ЗАКЉУЧАК .............................................................................................................................. 34
Списак слика ................................................................................................................................. 35
ЛИТЕРАТУРА .............................................................................................................................. 36

Завршни рад
3
УВОД
Систем еластичног ослањања брзоходног борбеног гусеничног возила један је од
најбитнијих система јер својим карактеристикама утиче на осцилаторну удобност и
могућност ефикасног дејствовања из наоружања. Ови захтеви су од изузетног значаја за
извршење борбеног задатка па се поклања велика пажња конструкцији, технологији израде
и прорачуну оптерећења свих елемената система еластичног ослањања. Експериментална
истраживања и испитивања елемената система еластичног ослањања су пре свега скупа и
временски захтевна. Ово су разлози због којих се у данашњици све више приступа изради
и испитивању 3Д модела израђених у различитим програмским пакетима који омогућавају
бржи, једноставнији и свакако јефтинији начин анализе система еластичног ослањања и
других подсистема возила.
У раду је приказана конструкција система еластичног ослањања борбеног возила пешадије
БВП М80А, принципи и поступци формирања геометријских модела основних елемената
система еластичног ослањања возила у одабраном програмском пакету, као и анализа
динамичких оптерећења и напонских стања еластичних елемената. За моделирање
основних елемената система еластичног ослањања коришћена је оригинална
конструкциона документација, тако да геометријски модели у великој мери одговарају
реалним елементима уграђеним на возило. Настојало се да се у раду елементи еластичног
ослањања оптерете оптерећењима која су најприближнија реалним оптерећењима која су
присутна током експлоатације возила. Овај начин испитивања различитих подсистема
возила је већ неко време присутан у развијеним индустријама у свету, али је у нашим
војно-научним установама још увек недовољно развијен и примењен. Давањем предности
симулационим испитивањима борбених возила у односу на експериментална, у великој
мери доприноси уштеди материјалних и временских ресурса. С друге стране, искључивање
експерименталних испитивања је немогуће јер се одређени значајни утицаји на реално
возило не могу симулирати и предвидети у програму. Из тог разлога, озбиљни светски
произвођачи придају подједнако велики значај и симулационим и експерименталним
испитивањима.

Завршни рад
4
1. ОПИС КОНСТРУКЦИЈЕ РАЗМАТРАНОГ СИСТЕМА
ЕЛАСТИЧНОГ ОСЛАЊАЊА
Одабрано брзоходно гусенично возило, чији ће се систем еластичног ослањања у
овом раду разматрати, јесте борбено возило пешадије, БВП М80А. Систем еластичног
ослањања возила БВП М80А је независни, за сваки потпорни точак, механички и састоји
се од следећих елемената:
Елементи за вођење точкова: лактасте осовине
Еластични ослонци: торзиони штапови и гумени граничници хода
Пригушни елементи: телескопски хидраулички амортизери
1.1. Елементи за вођење точкова
Елементи за вођење точкова имају задатак да обезбеде правилну кинематику
кретања точка у уздужној вертикалној равни, као и да преносе сва уздужна и бочна
оптерећења између точкова и оклопног тела. БВП има лактасте осовине-полуге (слика 1.1)
као водеће елементе, по једну за сваки точак. Лактасте осовине састоје се од три дела:
рукавца лежаја (1), лакта (2) и рукавца потпорног точка (3) [1].
Слика 1.1 Лактаста осовина
Лактаста осовина се израђује ковањем, од челика. Улежиштена је у посебно
кућиште, које се преко прирубнице завртњима везује за оклопно тело. У кућиште је
улежиштена преко два клизна лежаја са бронзаним чаурама (слика 1.2).

Завршни рад
5
Слика 1.2 Улежиштење лактасте осовине
1-прирубница; 2-бронзане чауре клизног лежаја; 3-прстен лавиринта
Лежаји лактасте осовине се пре уградње подмазују уљем ХИП 90. Уље се сипа кроз
отвор за подмазивање (слика 1.3) који је затворен, чепом, све док се уље не појави на
отвору за контролу нивоа уља, који је такође затворен чепом [1]. Крај рукавца лежаја
лактасте осовине је ожлебљен и у њега се узубљује торзиони штап. Све лактасте осовине
усмерене су ка задњем крају возила. Рукавац потпорног точка обезбеђује улежиштење
потпорног точка преко пара конусно ваљкастих лежаја [2].

Завршни рад
6
Слика 1.3 Пресек кућишта
1-отвор за везивање прирубнице за оклопно тело; 2-отвор за подмазивање лежаја
1.2. Еластични ослонци
Еластични ослонци имају задатак да приме и ублаже вертикална оптерећења која се
са подлоге преносе на оклопно тело. На БВП-у М80А примењени су механички еластични
ослонци у виду торзионих штапова (слика 1.4).
Слика 1.4 Торзиони штап (опруга)

Завршни рад
7
Торзиони штапови су попречно постављени у односу на уздужну вертикалну раван
возила. Шири крај штапа назива се велика „песница“ (слика 1.5.а), а ужи „мала песница“
(слика 1.5.б) [2].
Слика 1.5 Детаљи торзионог штапа
а) велика песница са отвором за вијак, б)мала песница са отвором за вијак
Није свеједно како се постављају и зато су означени словима Д (десни) и Л (леви)
крај [1]. Велика песница се преко жлеба узубљује са рукавцем лактасте осовине
ослоњеним у кућишту, а мала песница је ужлебљена са посебно уливеним улошком у
кућишту на супротној страни возила. На чеоним странама торзионих штапова је отвор са
навојем у који се уврће алат за монтажу и демонтажу штапова [3] . Отвори су заштићени од
воде и прљавштине чауром и вијцима [1] . Када возило наиђе на препреку потпорним
точком, он почиње да се креће навише и узрокује закретање лактасте осовине., Са
лактастом осовином је ужлебљена велика песница торзионог штапа и лактаста осовина
торзионом штапу саопштава момент увијања, сразмеран углу увијања односно закретања
лактасте осовине. Како је штап другим крајем фиксиран за кућиште, он увијањем
апсорбује енергију удара, долази до еластичних деформација попречног пресека штапа
након чега он тежи да се растерети и врати у неутралан положај. Као и сваку другу опругу,
и торзиони штап (опругу) карактерише одређена крутост. Према конструкционој
документацији крутост сваког торзионог штапа на БВП-у је:
(1)
На слици 1.6. приказан је технички цртеж торзионог штапа. Што је већа дужина торзионог
штапа, већа му је и еластичност односно може да трпи веће углове увијања [2]. Дужина
торзионих штапова износи . Торзиони штапови ове дужине и крутости
омогућавају динамички ход од око 130 mm. Захтеви за динамички ход већине борбених
возила, па и БВП-а М80А су да се омогући бар дупло већи динамички ход. Из тог разлога,
торзиони штапови се у завршним фазама производње излажу тзв. Преднапрезању [2].
Преднапрезање подразумева увијање торзионог штапа за угао од ,односно до
вредности напона увијања који је већи од напона увијања на граници еластичности, у
супротну страну од предвиђене стране напрезања, и његово држање у том стању. Штап се

Завршни рад
8
тада пластично деформише у површинском слоју, али је у унутрашњем слоју и даље
еластично деформисан. Када се штап отпусти он је преднапрегнут за угао од
.
Слика 1.6 Торзиони штап – технички цртеж
Унутрашњи, еластично деформисани слој тежи да се врати у неутрални, растерећен
положај, али се спољашњи, пластично деформисани слој одупире. Приликом деформације
штапа при наиласку на препреку, он се прво растерећује, а онда се оптерећује моментом
увијања, супротним од оног којим је преднапрегнут. Ово решење омогућава мање
напрезање торзионог штапа за исти угао увијања као и код обичног односно већи угао
увијања (динамички ход точка) за исто напрезање као и обичног торзионог штапа. Из
овога се да закључити да уколико би торзиони штапови били наопако постављени,
наилазак на препреку би их оптерећивао (увијао) у исту страну у коју су преднапрегнути,
тако да би врло брзо дошло до његовог оштећења и пуцања. Торзиони штапови морају
бити кружног попречног пресека (слика 1.7). Такође захтевају високу тачност и квалитет
обраде. Они се обрађују ваљањем, брушењем и полирањем како би обезбедили што већи
квалитет обраде без микропрслина.
Слика 1.7 Попречни пресек торзионог штапа

Завршни рад
9
Микропрслине су ипак присутне, па се из тог разлога приступа посебној обради,
тзв. бомбардовању челичним куглицама. Овај начин обраде ефикасно затвара
микропрслине на торзионом штапу и на тај начин се омогућава његов дужи радни век [2].
Осим основних еластичних ослонаца, на БВП-у М80А постоје и допунски
еластични елементи код којих карактеристика зависности крутости од деформације није
линеарна, већ прогресивна. Ови елементи реализовани су као обични гумени одбојници
или тзв. граничници хода лактасте осовине и реализовани су посебно за сваку лактасту
осовину. Уграђени су на вертикалним бочним плочама оклопног тела возила. Граничници
хода прве и последње лактасте осовине разликују се од граничника хода преостале три [3].
1.3. Пригушни елементи
Пригушни елементи на БВП-у М80 изведени су као хидраулични амортизери,
телескопског типа. Има их четири: на оба предња и на оба задња потпорна точка.
Намењени су да пригуше осцилације еластичних ослонаца, у што краћем временском
периоду, како би се обезбедила захтевана осцилаторна удобност возила. Амортизери су
хидрауличко-телескопског типа, двостраног дејства, тако да пригушују осцилације при
кретању потпорног точка и навише и наниже. Пригушење је веће приликом извлачења
амортизера него при његовом увлачењу, да се преко амортизера не би преносили удари на
возило. У амортизеру се налази 1,1 литар односно 1100 кубних центиметара хидрауличног
уља [1]. Амортизер се састоји од два цилиндра од којих је један мањег пречника и увучен у
други. За горњи део ширег цилиндра везана је клипњача која се завршава клипом на
другом крају. На клипу се налазе два калибрисана отвора која пригушују проток уља. При
наиласку на препреку, ужи цилиндар се увлачи у шири и уље преко калибрисаних отвора
прелази из једне коморе унутрашњег цилиндра у другу. При растерећењу торзионог штапа
односно при силаску са препреке, амортизер пригушује осцилације торзионог штапа тако
што се ужи цилиндар извлачи, те се уље потискује у „клипњачину“ страну цилиндра преко
калибрисаних отвора. При раду амортизера, односно при пригушењу сложених осцилација
возила, ствара се одређена количина топлоте која се предаје само зрачењем. Ово је једна
од негативних особина ових амортизера, због које су проналажене алтернативе у начину
преношења и ослобађања топлоте [3].

Завршни рад
10
2. МОДЕЛИРАЊЕ ЕЛЕМЕНАТА СИСТЕМА ЕЛАСТИЧНОГ
ОСЛАЊАЊА
За моделирање система еластичног ослањања БВП-а М80А, коришћен је
програмски пакет „Creo elements 3.0“. Овај програмски пакет поред могућности развоја 3Д
модела механичког склопа омогућава и симулацију његовог динамичког понашања, као и
прорачун напонских стања.
На основу конструкционе документације елемената система еластичног ослањања
БВП М80А извршено је моделирање делова система ослањања, неопходних делова
гусеничног кретача, као и дела оклопног тела, да би се могао моделирати склоп система
ослањања. Модел склопа система ослањања је хијерархијски, а сваки ниво хијерархије у
својој структури има делове или подсклопове (склопове нижег нивоа). Структура делова,
подсклопова и склопова који су моделирани приказана је у табели 1. Моделирани су сви
неопходни елементи система ослањања осим амортизера који се набавља као готов
производ.
Табела 1. Хијерархијска структура моделираних елемената
Елементи првог
нивоа
Елементи другог нивоа Елементи трећег нивоа
VO
ZIL
O.A
SM
Плоче оклопног тела
– 28 комада
sklop_desni.asm
KUCISTE.ASM
dg182020_kuciste.prt
dg182012-2-caura.prt
dg182011-prstenlavirinta.prt
dg182014-prsten.prt
dg182013-2-caura.prt
dg182021-ulozak.prt
dg182005.prt
dg182031_laktasta_osovina.prt
potporni_tocak.asm
df182124_glavcina.prt
df182131_disk_solid.prt
dg182121_1_venac_potporn
og_tock.prt
guma_tocka.prt
dg182032-prsten-lavirinta.prt
Елементи првог
нивоа
Елементи другог нивоа Елементи трећег нивоа
VO
ZI
LO
.A
SM
sklop_levi.asm KUCISTE.ASM
dg182020_kuciste.prt
dg182012-2-caura.prt
dg182011-prstenlavirinta.prt

Завршни рад
11
dg182014-prsten.prt
dg182013-2-caura.prt
dg182021-ulozak.prt
dg182005.prt
dg182031_laktasta_osovina.prt
potporni_tocak.asm
df182124_glavcina.prt
df182131_disk_solid.prt
dg182121_1_venac_potporn
og_tock.prt
guma_tocka.prt
dg182032-prsten-lavirinta.prt
У наредном тексту даће се приказ основних елемената модела система ослањања
који су значајни за његову геометрију, формирање склопа и омогућавање да се симулирају
елементи функције.
2.1. Моделирање геометрије елемената ослањања и основних подсклопова
Елементи система ослањања моделирани су у модулу за развој геометрије
стандардних машинских делова. При моделирању делова водило се рачуна да технички
елементи од којих се састоји модел, међусобне везе техничких елемената, као и помоћни
геометријеки елементи обезбеде могућност формирања подсклопова, као и финалног
склопа који ће имати захтевану функцију.
2.1.1. Лактаста осовина
За потребе модела ходног дела моделирана је лактаста осовина ознаке DG 182031.
Основни елементи геометрије лактасте осовине су технички елементи типа „extrude“
кружног попречног пресека, заобљења („round“), оборене ивице („chamfer“) и други. На
слици 2.1. приказани су референтни елементи преко којих лактаста осовина остварује везу
са осталим елементима возила. Лактаста осовина је део који се ротира око клизног лежаја
кућишта, тако да је поред елемената геометрије неопходно моделирати и референтне
елементе за моделирање склопа који треба да омогуће формирање одговарајућих веза.
Како лактаста осовина има један степен слободе (ротацију око осе лежаја кућишта), њено
кретање треба да буде ограничено на ротацију око поменуте осе. То се остварује
формирањем такозване „pin“ везе која има један степен слободе (једну ротацију). За
формирање ове везе потребно је да се обезбеди поклапање рефрентне осе (1) са
референтном осом клизног лежаја кућишта. Да би се спречило транслаторно померање

Завршни рад
12
лактасте осовине, код формирања пин везе потребно је дефинисати и референтни елемент
осовине који ће се поклопити са одговарајућим референтним елементом кућишта. Код
моделирања ове везе усвојено је да референтна раван за ограничење транслације буде
раван преко које се остварује веза лактасте освине са прстеном dg182014-prsten.prt (2,
слика 2.1), док ће на моделу склопа референтна раван бити чеона раван прстена. Поред
референтнравни за формирање везе лактасте осовине са кућиштем, потребно је дефинсати
референтне елементе за повезивање лактасте осовине са амортизером, као и са потпорним
точком. Веза са амортизером остварује се преко референтних тачака (3, слика 2.1). Веза
лактасте осовине и потпорног точка остварује се поклапањем осе рукавка потпорног точка
(4) и осе склопа потпорног точка, као и референтне тачке (5), са одговарајућом
референтном тачком склопа потпорног точка [4].
Слика 2.1 Елементи везе лактасте осовине и возила
1- референтна оса везе са кућиштем, 2 – раван везе са кућиштем, 3 – референтне тачке
за повезивање са амортизером, 4,5 – референтна елементи за повезивање са потпорним
точком

Завршни рад
13
2.1.2. Кућиште лактасте осовине
Кућиште лактасте осовине има 6 елемената који су моделирани на начин приказан у
табели 2. На сликама су назначени елементи преко којих се формира склоп кућишта
лактасте осовине.
Табела 2. Елементи кућишта лактасте осовине
Ред.
Бр.
Назив дела Геометријски модел Начин повезивања у склопу
1.
прирубница
кућишта
(dg182020_kuciste.
prt)
Поставља се у склоп као
основни (default) елемент
2.
Чаура
(dg182012-2-
caura.prt)
Веза 1: поклапање оса чауре и
кућишта
Веза 2: поравнавање чеоне
равни чауре и равни на кућишту
3.
Прстен лавиринта
(dg182011-
prstenlavirinta.prt)
Веза 1: поравнавање оса

Завршни рад
14
Веза 2: поравнавање равни
4.
Прстен
(dg182014-
prsten.prt)
Веза 1: поравнање оса
Веза 2: поравнање равни
5.
Чаура
(dg182013-2-
caura.prt)
Веза 1: поравнање оса
Веза 2: поравнање равни
6.
Уложак
(dg182021-
ulozak.prt)
Веза 1: поравнање оса
Веза 2: поравање равни
Веза 3: поравнање равни

Завршни рад
15
7. Чaура
(dg182005.prt)
Веза 1: поравнање оса
Веза 2: поравнање равни
Склоп кућишта лактасте осовине приказан је на слици 2.2. Начин повезивања елемената
приказан је у табели 2.
Слика 2.2 Пресек склопа кућишта

Завршни рад
16
2.1.3. Торзиони штап
Геометријски модел торзионог штапа приказан је на слици 1.4. Геометрија штапа
моделирана је према конструкционој документацији, осим ожлебљења које је стандардне
конструкције и није моделирано. Моделирање геометрије торзионог штапа веома је битно
са аспекта анализе његових наопонских стања, док је са аспекта симулирања динамичког
понашања непотребно, имајући у виду да се у програмском патету „Creo elements 3.0“
еластични елемент моделира симболички, додавањем карактеристика опруге вези лактасте
осовине и торзионог штапа. Елементи геометрије торзионог штапа приказани су на
сликама 1.5.а, 1.5.б и 1.6, тако да се овде неће посебно понављати.
2.1.4. Потпорни точак
Потпорни точак је склоп који се састоји од елемената спојених заваривањем, док је
гумени бандаж са телом потпорног точка спојен вулканизацијом. Делови склопа потпорног
точка приказани су у табели 3. На сликама су назначени и елементи преко којих се
формира склоп потпорног точка. Потпорни точкови, као део ходног дела тј. гусеничног
кретача, не спадају у елементе еластичног ослањања, али су моделирани и биће описани
јер се и од њих формира завршни склоп система еластичног ослањања. Склоп потпорног
точка се састоји од:
Табела 3. Елементи склопа потпорног точка
Ред
.
Бр.
Назив дела Геометријски модел Елементи за везу
1. Главчина точка
(DF 182124.prt)
1. Референтна тачка за
постављање пин везе
2. оса за повезивање са

Завршни рад
17
рукавцем лактасте осовине
2. диск
(DF 182131.prt)
Веза 1: поравнате осе
главчине и диска везом
„align“
Веза 2,3: референтне равни за
повезивање главчине и диска
везом „alaign“
3. Венац
(DG182121_1.prt)
Веза 1: поравнате осе венца
потпорног точка и главчине
Веза 2,3: референтне равни за
везу главчине и венца
потпорног точка

Завршни рад
18
4. Гума (гумени
бандаж)
Веза 1: поравнате осе
Везе 2,3: поравнате равни
Склоп потпорног точка формиран је повезивањем делова из табеле 3 ригидним везама.
Склоп је приказан на слици 2.3.
Слика 2.3 Склоп потпорног точка

Завршни рад
19
2.2. Моделирање склопова
Након развоја основних подсклопова приступило се формирању склопа који се
састоји од лактасте осовине (dg182031_laktasta_osovina.prt), склопа кућишта лактасте
осовине (kuciste.asm) и потпорног точка (potporni_tocak.asm). За разлику од претходних
склопова, овај склоп има покретне елементе, тако да се водило рачуна о начину
остваривања веза које ће обезбедити кретање елемената засновано на функцији система
ослањања. За наведено су искоришћене две везе које обезбеђују један ротациони степен
слободе кретања („pin“) [4].
2.2.1. Моделирање везе лактасте осовине са склопом кућишта
Веза између лактасте осовине и склопа кућишта, које је постављено као основни
„default“ елемент, остварује се „pin“ везом која у моделу врши функцију клизног лежаја.
Да би се остварила ова веза, потребно је извршити следећа ограничења (слика 2.4):
поравнање оса лактасте осовине (dg182031_laktasta_osovina.prt) и склопа кућишта
(kuciste.asm) везом „axis alignment“, ограничење транслаторног кретања везом „translation“
између површина на лактастој осовини и прстену (dg182014-prsten.prt) и ограничење
ротације лактасте осовине односно њеног хода везом „rotation“.
Слика 2.4 Референтни елементи за остваривање везе лактасте осовине и кућишта
1-поравнате осе; 2-поравнате површине за ограничење транслације

Завршни рад
20
Ограничење ротације лактасте осовине врши се у односу на одређену раван или неки
други референтни елемент. На приказаном моделу БВП-а М80А ограничење ротације
лактасте осовине извршено је у односу на равни (1) приказане на слици 2.5.
Ход лактасте осовине ограничен је са 30 степени на горе и 20 степени на доле у односу на
приказани (неутрални) положај лактасте осовине .
Слика 2.5 Ограничење хода лактасте осовине
2.2.2. Моделирање везе потпорног точка са рукавцем лактасте осовине
Веза потпорног точка (potporni_tocak.asm) и рукавца лактасте осовине (слика 2.6.)
такође се остварује „pin“ везом која потпорном точку омогућава један ротациони степен
слободе кретања. Поравнате су осе главчине потпорног точка и рукавца потпорног точка
лактасте осовине (1), а за ограничење транслаторног кретања коришћене су тачке на
рукавцу потпорног точка лактасте осовине PNT5 и на главчини потпорног точка PNT0 (2).

Завршни рад
21
Слика 2.6 Референтни елементи за везивање потпорног точка и лактасте осовине
1-поравнате осе; 2-поклопљене тачке
Остварењем ових веза формирани су склопови под називом „sklop_levi.asm“ и
„sklop_desni.asm“ (слика 2.7). Разлика између ова два склопа је само у усмерењу лактасте
осовине јер је један за леву а један за десну страну возила.

Завршни рад
22
Слика 2.7 Склоп кућишта, лактасте осовине
и потпорног точка
2.2.3. Моделирање склопа возила
Склоп возила БВП М80А је комплетиран када се у леве и десне отворе на бочним
плочама возила сместе измоделирани „sklop_levi.asm“ и „sklop_desni.asm“. Њихово
смештање извршено је чврстом „rigid“ везом која замењује завртањску везу прирубнице
кућишта и оклопног тела на стварном возилу (слика 2.8).

Завршни рад
23
Слика 2.8 Референтне површине за смештање кућишта у оклопно тело
Склоп модела система еластичног ослањања борбеног возила пешадије БВП М80А
приказан је на слици 2.9.
Слика 2.9 Три Д модел система еластичног ослањања возила БВП М80А

Завршни рад
24
3. СИМУЛАЦИЈА ДИНАМИЧКОГ ПОНАШАЊА СИСТЕМА
ЕЛАСТИЧНОГ ОСЛАЊАЊА
Тродимензионални рачунарски модел система еластичног ослањања развијен је са
циљем омогућавања симулације динамичког понашања возила у условима који одговарају
реалним, имајући у виду да програмски пакет CreoElements има модул „Mechanism“ који
омогућава симулацију динамичких система крутих тела („multibody system dynamics“). Да
би се обезбедила могућност симулације понашања система еластичног ослањања
неопходно је да поред модела возила постоји и модел подлоге, уз одговарајућу
интеракцију између возила и подлоге. Формирањем модела возила на подлози стварају се
услови за проверу могућности симулације ослањања возила на подлогу, као и динамичког
понашања возила (овешене масе) у случају наиласка на препреку одговарајуће геометрије.
У првој фази развоја симулационог модела анализира се веза модела возила и подлоге под
утицајем сопствене тежине возила, да би се у следећим фазама анализирала могућност
понашања возила у кретању.
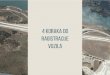
3.1. Дефинисање положаја и веза 3Д модела и подлоге
Подлога је израђена као extrude елемент правоугаоника. Потребно је дефинисати
тип везе возила и подлоге тј. колико ће степени слободе возило имати у односу на подлогу.
За потребе анализе возилу је додељена „6 DOF“ веза (six degrees of frеedom), која му
омогућава три ротације и три транслације. Референтни елементи за формирање ове везе
приказани су на слици 3.1. Први корак у моделирању ове везе јесте поравнање
координатних система на возилу и на подлози везом „Csys alignment“ (1). Следећи корак је
дефинисање положаја тачке на возилу у односу на тачку на подлози по све три осе везама
„Translation“ (2) [5].

Завршни рад
25
Слика 3.1 Референтни елементи за остварење „6 DOF“ везе
1-поравнати координатни системи; 2-референтне тачке
Након дефинисања положаја и броја степени слободе возила у односу на подлогу,
потребно је дефинисати тип везе коју возило остварује са подлогом. Ово се може урадити
на неколико начина од којих у великој мери зависи сложеност модела. У раду је усвојено
да се за контакт точка и подлоге користи „cam follower“ веза из разлога што остали типови
везе, када је овако сложен модел у питању, праве одређене техничке проблеме, па програм
има потешкоћа да изврши анализу динамичких оптерећења возила. Веза „cam follower“ се
формира тако што се за „cam1“ одабере крива (1) на потпорном точку која остварује
контакт са подлогом (слика 3.2). За „cam2“ је изабрана горња површина подлоге (2), а као
„front“ и „back“ референце бирају се тачке (3, слика 3.3).
Слика 3.2 Елементи за
формирање „cam“ везе

Завршни рад
26
Слика 3.3 Елементи за формирање „cam“ везе
3.2. Симулација ослањања возила на подлогу
Симулација динамичког понашања система у модулу „mechanism analyses“
реализује се кроз дефинисање анализа којима се утврђују услови симулације (почетак,
крај, почетни услови), кинематски и динамички параметри. За симулацију ослањања
возила на подлогу дефинисан је почетни положај возила који је био непосредно изнад
подлоге, са растерећеним еластичним елементима. Процес ослањања возила на подлогу
реализује се услед дејства сопствене тежине овешене масе, без дејства других сила и
момента и без претходно дефинисаних промена кинематских параметара (положаја, брзина
или убрзања). Да би се добиле информације о динамичком понашању возила дефинишу се
мерне величине које ће се током симулације пратити [5]. За предметну анализу одабране
су следеће величине:
положај тежишта овешене масе (body center of mass - y)
моменти увијања у торзионим штаповима (net load)
нормалне реакције подлоге (connection reaction/radial force)
транслаторно померање овешене масе по све три осе (position)

Завршни рад
27
угаоно померање овешене масе (закретање) око све три осе (position)
За симулацију ослањања возила на подлогу предвиђено је да се дужина периода
симулације прилагоди трајању слободних осцилација возила, односно да симулација траје
док се амплитуде осцилација овешене масе не доведу у дефинисане границе. У почетном
тренутку висина возила се смањивала да би се након достизања минимума почела
повећавати (слика 3.4). Промена момената у торзионим штаповима показала је да предњи
потпорни точкови први примају оптерећење које се повећава, док се задњи потпорни
точкови прво оптерећују, а након тога растерећују (слика 3.5). Ово показује да приликом
симулације ослањања возила са тренутним распоредом маса долази до галопирања возила.
Након 0,45 секунди трајања симулације дошло је до наглог успоравања рада рачунара,
тако да је симулација прекинута.
Слика 3.4 Промена положаја овешене масе по вертикалној оси

Завршни рад
28
Слика 3.5 Промена момената у торзионим штаповима при
Покретањем симулације са истим параметрима за положај возила у којем је
претходна симулација прекинута дошло је до појаве слободног осциловања возила око
равнотежног положаја, а резултати су приказани на сликама 3.6 до 3.9.

Завршни рад
29
Слика 3.6 Моменти у торзионим штаповима
Промена оптерећења еластичних елемената приказана на слици 3.6 показује да у овој
симулацији долази до слободног осциловања возила при којем су предњи потпорни
точкови потпуно оптерећени, док је оптерећење задњих потпорних точкова променљиво
по предзнаку, што указује на чињеницу да долази до потпуног растерећења потпорних
точкова. Овим се показује да је угаоно осциловање око попречне осе (галопирање)
настављено, уз веће осциловање задње стране возила. Наведену чињеницу потврђује и
промена нормалних реакција подлоге на потпорним точковима (слика 3.7), где се
амплитуде момената увијања и нормалних реакција поклапају.
-8000000
-6000000
-4000000
-2000000
0
2000000
4000000
6000000
8000000
0 0.5 1 1.5 2 2.5 3
M [
Nm
m]
t[sec]
D1
D5
L1
L5

Завршни рад
30
Слика 3.7 Нормалне реакције подлоге на потпорним точковима
Величина линеарних осцилација по вертикалној оси (Y) и уздужној оси (X)
приказане су на слици 3.8, док су линеарне осцилације по попречној оси (Z) приказане на
слици 3.9. Видљиво је да се вертикалне осцилације смањују, док је осциловање возила по
уздужној оси константно. По попречној оси нема осцилација, него долази до минималног
померања возила у једну страну.
Слика 3.8 Осцилације по све три осе-транслаторно померање
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
0 0.5 1 1.5 2 2.5 3
F[N
]
t [Sec]
N1D
N5D
N1L
N5L
-350
-300
-250
-200
-150
-100
-50
0
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
L [m
m]
t [sec]
Lx
Ly

Завршни рад
31
Осцилације по Z оси приказане су на засебном дијаграму (слика 3.9) јер се, због
неочекиваног понашања возила у програму, добијају резултати који не одговарају реалном
стању.
Слика 3.9 Линеарне осцилације по Z оси
Покушај да се врше даље симулације динамичког понашања возила није уродио
плодом због сложености модела и немогућности да се обезбеде одговарајући рачунарски
ресурси, тако да се одустало од анализе динамичког понашања возила са уграђеним
амортизерима, као и анализе динамичког понашања возила при наиласку на препреку.
3.2. Анализа напонских стања лактасте осовине
Без обзира на проблеме везане за симулацију динамичког понашања возила, могуће
је да се симулацијом утврди величина максималних оптерећења појединих елемената
система еластичног ослањања. Уколико се ова оптерећења познају, у оквиру модула
„simulation“ могуће је извршити анализу напона деформација свих елемената система
ослањања. Исто ће се показати на примеру лактасте осовине. На слици 3.10 приказан је
начин дефинисања ослонца, односно укљештења које је неопходно да би се анализирала
-1757.957
-1557.957
-1357.957
-1157.957
-957.9572
-757.9572
-557.9572
-357.9572
-157.9572
42.042772
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
L [m
m]
t [sec]
Линеарне осцилације по Z оси
Lz

Завршни рад
32
напонска стања. У конкретном случају ослонац је дефинисан у зони контакта лактасте
осовине и торзионог штапа, што омогућава да се коректно утврде напонска стања.
Слика 3.10. Дефинисање ослонаца за анализу напонских стања лактасте осовине
Након дефинисања укљештења неопходно је дефинисати оптерећења која делују на
лактасту осовину. Програмски модул омогућава да се дефинише оптерећење елемента које
се преноси преко лежаја („bearing“), чиме се обезбеђује реално увођење опетрећења на
рукавце лежаја потпорног точка. На слици 3.11. приказан је начин дефинисања оптерећења
на спољашњем лежају потпорног точка.
Након дефинисања оптерећења приступа се генерисању мреже коначних елемената,
њеном прилагођавању конкретној структури, односно повећавању густине мреже
коначних елемената према критичним пресецима и одређеним елементима геометрије
лактасте осовине. У раду није вршено прилагођавање мреже коначних елемената, него је
коришћена мрежа која је аутоматски генерисана. Напонска стања лактасте осовине за
дефинисана ограничења и оптерећења приказана су на слици 3.11. На основу слике
напонских стања јасно је видљиво да је критичан пресек у зони везе лакта и ослонца
торзионог штапа, што одговара и подацима из литературе [6,7].

Завршни рад
33
Слика 3.11. Дефинисање опетрећења
Слика 3.11. Напонска стања лактасте осовине

Завршни рад
34
4. ЗАКЉУЧАК
Систем еластичног ослањања борбеног гусеничног возила веома је важан
подсистем како возила, тако и борбеног система који је интегрисан на возило, имајући у
виду да битно утиче на динамичко понашање возила при кретању, али и на понашање
возила при дејству борбеног система. Прилагођавање параметара система еластичног
ослањања тактичко-техничким захтевима који се постављају пред борбени систем може
имати пресудан утицај на њихово задовољење, односно на могућност њиховог испуњења.
Развој рачунарског модела возила који ће омогућити да се анализира утицај параметара
система ослањања у првим фазама развоја система, пре производње физичког модела може
значајно скратити време неопходно за развој, као и смањити трошкове развоја новог
система.
Развијени рачунарски модел система еластичног ослањања борбеног возила
пешадије БВП М80А омогућава анализу вођења потпорних точкова, пројектовање
оптималног положаја граничника хода, анализу утицаја размештаја елемената система
ослањања у возилу и слично. Симулација динамичког понашања возила са системом
ослањања који има велик број степени слободе у програмском модулу „mechanism
simulation“ програмског пакета CreoParametric није дала очекиване резултате, што доводи
до закључка да је симулација динамичког понашања сложених система са великим бројем
степени слободе веома захтевна и да је могућа једино коришћењем „јачих“ рачунара, као и
специјализованих софтвера. Свакако, развијени рачунарски модел омогућава да се добију
реални, веома драгоцени подаци о кључним динамичким параметрима елемената
осцилаторног модела: маси, положају тежишта, моментима инерције и врстама веза. Ови
подаци могу се користити за развој осцилаторног модела возила коришћењем
специјализованих софтверских пакета, нпр. MSC Adams.
Развијени рачунарски модел система ослањања омогућава коректну анализу утицаја
оптерећења елемената, имајући у виду да се геометрија сваког елемента може реално
моделирати. У раду је приказана анализа напонско-деформационих стања изабраног дела
система ослањања која је показала да су критични напони у зонама за које је познато да су
највише оптерећене. Није вршена анализа напонских стања склопова која је сложенија и
која захтева коректно дефинисање интеракције између појединих елемената склопа. Ова
анализа је врло значајна и поред примене развијеног модела за анализу динамичког
понашања возила коришћењем специјализованих софтверских пакета, представља важан
правац даљих истраживања.

Завршни рад
35
СПИСАК СЛИКА
Слика 1.1 Лактаста осовина .......................................................................................................... 4
Слика 1.2 Улежиштење лактасте осовине ................................................................................... 5
Слика 1.3 Пресек кућишта ............................................................................................................. 6
Слика 1.4 Торзиони штап (опруга) ............................................................................................... 6
Слика 1.5 Детаљи торзионог штапа .............................................................................................. 7
Слика 1.6 Торзиони штап – технички цртеж ............................................................................... 8
Слика 1.7 Попречни пресек торзионог штапа ............................................................................. 8
Слика 2.1 Елементи везе лактасте осовине и возила ................................................................ 12
Слика 2.2 Пресек склопа кућишта .............................................................................................. 15
Слика 2.3 Склоп потпорног точка .............................................................................................. 18
Слика 2.4 Референтни елементи за остваривање везе лактасте осовине и кућишта ............. 19
Слика 2.5 Ограничење хода лактасте осовине .......................................................................... 20
Слика 2.6 Референтни елементи за везивање потпорног точка и лактасте осовине ............. 21
Слика 2.7 Склоп кућишта, лактасте осовине и потпорног точка ........................................... 22
Слика 2.8 Референтне површине за смештање кућишта у оклопно тело ............................... 23
Слика 2.9 Три Д модел система еластичног ослањања возила БВП М80А ............................ 23
Слика 3.1 Референтни елементи за остварење „6 DOF“ везе 1-поравнати координатни
системи; 2-референтне тачке ....................................................................................................... 25
Слика 3.2 Елементи за формирање „cam“ везе......................................................................... 25
Слика 3.3 Елементи за формирање „cam“ везе.......................................................................... 26
Слика 3.4 Промена положаја овешене масе по вертикалној оси ............................................. 27
Слика 3.5 Промена момената у торзионим штаповима при .................................................... 28
Слика 3.6 Моменти у торзионим штаповима ............................................................................ 29
Слика 3.7 Нормалне реакције подлоге на потпорним точковима ........................................... 30
Слика 3.8 Осцилације по све три осе-транслаторно померање ............................................... 30
Слика 3.9 Линеарне осцилације по Z оси .................................................................................. 31

Завршни рад
36
ЛИТЕРАТУРА
[1] Борбено возило пешадије БВП М80А, опис, руковање, основно и техничко
одржавање, ССНО, техничка управа, Београд, 1989.
[2] Муждека С. Основи борбених возила, уџбеник, ВА и СЉР МО, Београд, 2012.
[3] Муждека С., Перић С. Основи борбених возила, практикум за вежбе, ВА и СЉР МО,
Београд 2013.
[4] 390-T3923 - Mechanism Design using Creo Parametric 2.0
[5] 390-T3924 - Mechanism Simulation using Creo Parametric 2.0
[6] Чобиток, В.А. и др. Конструкција и прорачун тенкова и борбених возила пешадије,
уџбеник (на руском језику), Војно издање, Москва, 1984.
[7] Лазаревић Д. Конструкција оклопних возила, скрипта, ВА и СЉР МО, Београд,
2007.