Embed Size (px)
Citation preview

1
MECH 466Microelectromechanical Systems
University of VictoriaDept. of Mechanical Engineering
Lecture 15:Polymer MEMS
Stiction in MEMS
© N. Dechev, University of Victoria
2
Polymer Materials for MEMS fabrication
Introduction to Stiction
Causes of Stiction
Stiction Modeling
Stiction Reduction Methods
Overview
© N. Dechev, University of Victoria

3
Polymer Materials
Polymer materials are created by a long repeating series of smaller molecules (chains of smaller molecules).
The smaller molecules have a ‘natural tendency’ to link together with each other, when subjected to a ‘driving force’ to form long chains, that cross-link with other chains, again and again, to form a ‘solid material’.
© N. Dechev, University of Victoria
Image of polyethylene polymer chain[Image from University of Florida]
Image of ‘cross-linked’ polymer chains[Center for Polymer Studies]
4
Polymer Categories
Polymers can be categorized into three major classes:
FibersNatural Fibres -Hair, Cotton, Cellulose, Silk, etc...Synthetic Fibres - Polyester, Polyamide Nylon, etc...
PlasticsPolyethylene, Polypropylene, Polyvinyl Chloride (PVC) Polymethyl methacrylate (Acrylic), etc...
ElastomersRubber, etc...
See Table 12.1 in textbook for the properties of these three classes of polymers.
© N. Dechev, University of Victoria

5
Polymer Categories
Polymers can also be categorized in terms of temperature response:
Thermal Plastic Polymers (Thermalplasts)-Can be re-melted and re-shaped repeatedly (e.g. acrylic, and PVC)
Thermal Setting Polymers (Thermalsets)-Take on a permanent shape once polymerized/processed (e.g. epoxy, and phenolic)
© N. Dechev, University of Victoria
6
Polymers in Microelectronics
The use of Polymers in microelectronics and MEMS is a growing area.
In microelectronics, polymer technology is being developed for applications such as:
-Plastic transistors,
-Organic thin-film displays
-Plastic Memory
The motivation for the use of plastics is:
-Unique properties: Flexibility, Bio-compatibility, etc...
-Lower cost of materials
-Lower cost of fabrication: Injection molding, screen printing of layers, thermal embossing, etc....
© N. Dechev, University of Victoria

7
Polymers in MEMS
The advantages that apply to microelectronics, apply similarly to MEMS. Especially the unique aspects of plastic material properties.
Typical Polymers that are used in MEMS include:
- Polyimide
- SU-8
- Liquid Crystal Polymer
- PDMS (poly dimethylsioxane)
- PMMA (poly methyl methacrylate, ‘acrylic’)
- Parylene
- Teflon
© N. Dechev, University of Victoria
8
Case Study 12.3: Parylene Polymer Pressure Sensor
Shown below is a pressure sensor made with a polymer surface micromachining process.
© N. Dechev, University of Victoria
Polymer Pressure Sensor, [Image from F.of.MEMS, Chang Liu]
-Membrane displacement up to 30 um-Zigzag metal film layer serves as resistor

9
Consider the Schematic of the Top View and Cross-Sectional View:
© N. Dechev, University of Victoria
Polymer Pressure Sensor, [Image from F.of.MEMS, Chang Liu]
!
!"#
$%&'&()$
%(*+*+,--%.
*,/'(0
&12&($,(%!3# #3!"
$%&'&()$
Case Study 12.3: Parylene Polymer Pressure Sensor
10
Case Study: SU-8 Force Transducer
The prototype structure below has been designed to attempt to measure the ‘net magnetic force’ on a sample placed on the platform.
© N. Dechev, University of Victoria
Polymer Force Transducer, [William Liu, Ian Foulds]
-SU-8 beams are 20 um wide x 500 um long, and 35 um thick-SU-8 was chosen for ‘Low E (modulus)’, high aspect ratio-Si Substrate was isotropically etched to create 100 um clearance

11
Case Study: SU-8 Force Transducer
It is also interesting to note that many polymer MEMS are optically transparent, as shown in the images below.
© N. Dechev, University of Victoria
Optical Microscope image of SU-8 Transducer, Top Surface in Focus
SU-8 Transducer, Bottom Surface in Focus
12
Polymer MEMS
For Homework, Review Case Studies: 12.2, 12.3 and 12.4
© N. Dechev, University of Victoria

13
What is Stiction?
Stiction is a combination of one or more ‘adhesion forces’ or ‘adhesion phenomena’ between objects in direct contact.
Stiction occurs at all scales, and has a finite effect, based on the effective contact area (true points of contact between two rough surfaces), and other parameters.
Consider the example below of two typical surfaces in contact, each with some amount of surface roughness:
© N. Dechev, University of Victoria
A physical model to predict stiction in MEMS
az
Surface a
Figure 8. Gaussian distribution of surface heights.
Surface b
Surface a
az
bz
0
Figure 9. Modeling of surface roughnesses and equilibriumdistance.
distances. If we know this distribution, we can calculate thesurface interaction energy. This principle was the main pointof the previously referred to paper of van Spengen et al [22].
The next part covers the quest to find this distancedistribution function. The model allows us to find usefultrends, and be able to understand better what happens actuallyin a situation in which stiction is occurring, which effectsare important and which conditions do not have such a largeinfluence. Finally, we can define worst-case situations fordifferent environmental conditions and surfaces, and givesuggestions for engineering solutions alleviating the stictionproblems in MEMS.
The starting point is a quantitative description of roughsurfaces in contact. We define a MEMS device in whichtwo surfaces a and b coming together are possibly proneto stiction. When we bring the surfaces closer and closertogether, the first contact points will yield plastically due tothe large force per unit area. Only when we are so close that theforce can be fully counteracted by the material of the surface,equilibrium is reached, but by then the highest asperities arenot the only ones governing the surface interaction energyof the system. We get the situation of figure 9, in whichthere is a certain distance z̄a + z̄b between the mean positionsof the bottom surface z̄a and the top surface z̄b. Thestandard deviations of the surface heights are ! a and ! b,respectively.
The origin of the z-axis is at the mean height value of thelower surface (the plane where the complete interface would bein case the surfaces were not rough). We assume that surfacesapproaching each other will halt at an equilibrium distancez̄a + z̄b = d0.
The height distribution functions of the surfaces are ha(z)
and hb(z). If we have a function e(z) giving the interactionenergy per unit area, varying with the distance z between the
surfaces, we are interested in the distance probability densityfunction of the surfaces, because this function is going to giveus the amount of surface at a specific distance, and henceits influence on the total energy. With the configuration offigure 9, we obtain, from the height distribution functions,this distance probability function, hab(z). For the Gaussiandistribution, the calculation is as follows. Having surfaceswith distributions ha(z) and hb(z) given by
ha (z, z̄a) = 1
!a!
2"exp
!" (z " z̄a)
2
2! 2a
"and
hb(z, z̄b) = 1
!b
!2"
exp!" (z " z̄b)
2
2! 2b
",
(7)
the distribution of the distance between the surfaces hab(z) is
hab(z, z̄a + z̄b) =1
#2"
$! 2
a + ! 2b
% exp
&
"(z " (z̄a + z̄b))
2
2$! 2
a + ! 2b
%'
.
(8)
For the special case in which z̄a + z̄b = d0, the equilibriumdistance, we will call the distance distribution function hd0(z).
Of course, the Gaussian approximation is rather crude, andbecomes less useful when the forces between the surfaces arevery weak, because of the deviations from the real distributionin the tail of the Gaussian. When we measure the surfaceswith an AFM, we get a better description. In this casewe get a discrete set Sa of n ‘height sample points’ forsurface a,
Sa : za1, za2, . . . , zan. (9)
In the same way, we get a set Sb for the other surface,
Sb : zb1, zb2, . . . , zbn. (10)
Now we need a reference height for both surfaces, which weagain choose to be the mean height, given by
z̄a = 1n
n(
N=1
zaN and z̄b = 1n
n(
N=1
zbN . (11)
For a given separation z̄a + z̄b, we can now calculate theset giving the sum of the height sets, Sab, equivalent tothe previously given distance distribution function hab(z) forthe Gaussian case. It is
Sab : (za1 " z̄a) + (zb1 " z̄b), (za2 " z̄a)
+ (zb2 " z̄b), . . . , (zan " z̄a) + (zb n " z̄b). (12)
In the same way we define Sd0 to be Sab for which z̄a + z̄b = d0.In the remainder of the paper we will continue to use ha(z),hb(z), hab(z) and hd0(z), knowing that we can always use thesets of real measurement points Sa, Sb, Sab and Sd0 instead ifrequired. We can use the sets by directly putting them intoa numerical calculation, ‘binning’ them (as in a histogram)to obtain fewer data points before using them in a numericalcalculation, or fitting an analytical function to them and usingthis function directly.
707
A physical model to predict stiction in MEMS
az
Surface a
Figure 8. Gaussian distribution of surface heights.
Surface b
Surface a
az
bz
0
Figure 9. Modeling of surface roughnesses and equilibriumdistance.
distances. If we know this distribution, we can calculate thesurface interaction energy. This principle was the main pointof the previously referred to paper of van Spengen et al [22].
The next part covers the quest to find this distancedistribution function. The model allows us to find usefultrends, and be able to understand better what happens actuallyin a situation in which stiction is occurring, which effectsare important and which conditions do not have such a largeinfluence. Finally, we can define worst-case situations fordifferent environmental conditions and surfaces, and givesuggestions for engineering solutions alleviating the stictionproblems in MEMS.
The starting point is a quantitative description of roughsurfaces in contact. We define a MEMS device in whichtwo surfaces a and b coming together are possibly proneto stiction. When we bring the surfaces closer and closertogether, the first contact points will yield plastically due tothe large force per unit area. Only when we are so close that theforce can be fully counteracted by the material of the surface,equilibrium is reached, but by then the highest asperities arenot the only ones governing the surface interaction energyof the system. We get the situation of figure 9, in whichthere is a certain distance z̄a + z̄b between the mean positionsof the bottom surface z̄a and the top surface z̄b. Thestandard deviations of the surface heights are ! a and ! b,respectively.
The origin of the z-axis is at the mean height value of thelower surface (the plane where the complete interface would bein case the surfaces were not rough). We assume that surfacesapproaching each other will halt at an equilibrium distancez̄a + z̄b = d0.
The height distribution functions of the surfaces are ha(z)
and hb(z). If we have a function e(z) giving the interactionenergy per unit area, varying with the distance z between the
surfaces, we are interested in the distance probability densityfunction of the surfaces, because this function is going to giveus the amount of surface at a specific distance, and henceits influence on the total energy. With the configuration offigure 9, we obtain, from the height distribution functions,this distance probability function, hab(z). For the Gaussiandistribution, the calculation is as follows. Having surfaceswith distributions ha(z) and hb(z) given by
ha (z, z̄a) = 1
!a!
2"exp
!" (z " z̄a)
2
2! 2a
"and
hb(z, z̄b) = 1
!b
!2"
exp!" (z " z̄b)
2
2! 2b
",
(7)
the distribution of the distance between the surfaces hab(z) is
hab(z, z̄a + z̄b) =1
#2"
$! 2
a + ! 2b
% exp
&
"(z " (z̄a + z̄b))
2
2$! 2
a + ! 2b
%'
.
(8)
For the special case in which z̄a + z̄b = d0, the equilibriumdistance, we will call the distance distribution function hd0(z).
Of course, the Gaussian approximation is rather crude, andbecomes less useful when the forces between the surfaces arevery weak, because of the deviations from the real distributionin the tail of the Gaussian. When we measure the surfaceswith an AFM, we get a better description. In this casewe get a discrete set Sa of n ‘height sample points’ forsurface a,
Sa : za1, za2, . . . , zan. (9)
In the same way, we get a set Sb for the other surface,
Sb : zb1, zb2, . . . , zbn. (10)
Now we need a reference height for both surfaces, which weagain choose to be the mean height, given by
z̄a = 1n
n(
N=1
zaN and z̄b = 1n
n(
N=1
zbN . (11)
For a given separation z̄a + z̄b, we can now calculate theset giving the sum of the height sets, Sab, equivalent tothe previously given distance distribution function hab(z) forthe Gaussian case. It is
Sab : (za1 " z̄a) + (zb1 " z̄b), (za2 " z̄a)
+ (zb2 " z̄b), . . . , (zan " z̄a) + (zb n " z̄b). (12)
In the same way we define Sd0 to be Sab for which z̄a + z̄b = d0.In the remainder of the paper we will continue to use ha(z),hb(z), hab(z) and hd0(z), knowing that we can always use thesets of real measurement points Sa, Sb, Sab and Sd0 instead ifrequired. We can use the sets by directly putting them intoa numerical calculation, ‘binning’ them (as in a histogram)to obtain fewer data points before using them in a numericalcalculation, or fitting an analytical function to them and usingthis function directly.
707
A physical model to predict stiction in MEMS
az
Surface a
Figure 8. Gaussian distribution of surface heights.
Surface b
Surface a
az
bz
0
Figure 9. Modeling of surface roughnesses and equilibriumdistance.
distances. If we know this distribution, we can calculate thesurface interaction energy. This principle was the main pointof the previously referred to paper of van Spengen et al [22].
The next part covers the quest to find this distancedistribution function. The model allows us to find usefultrends, and be able to understand better what happens actuallyin a situation in which stiction is occurring, which effectsare important and which conditions do not have such a largeinfluence. Finally, we can define worst-case situations fordifferent environmental conditions and surfaces, and givesuggestions for engineering solutions alleviating the stictionproblems in MEMS.
The starting point is a quantitative description of roughsurfaces in contact. We define a MEMS device in whichtwo surfaces a and b coming together are possibly proneto stiction. When we bring the surfaces closer and closertogether, the first contact points will yield plastically due tothe large force per unit area. Only when we are so close that theforce can be fully counteracted by the material of the surface,equilibrium is reached, but by then the highest asperities arenot the only ones governing the surface interaction energyof the system. We get the situation of figure 9, in whichthere is a certain distance z̄a + z̄b between the mean positionsof the bottom surface z̄a and the top surface z̄b. Thestandard deviations of the surface heights are ! a and ! b,respectively.
The origin of the z-axis is at the mean height value of thelower surface (the plane where the complete interface would bein case the surfaces were not rough). We assume that surfacesapproaching each other will halt at an equilibrium distancez̄a + z̄b = d0.
The height distribution functions of the surfaces are ha(z)
and hb(z). If we have a function e(z) giving the interactionenergy per unit area, varying with the distance z between the
surfaces, we are interested in the distance probability densityfunction of the surfaces, because this function is going to giveus the amount of surface at a specific distance, and henceits influence on the total energy. With the configuration offigure 9, we obtain, from the height distribution functions,this distance probability function, hab(z). For the Gaussiandistribution, the calculation is as follows. Having surfaceswith distributions ha(z) and hb(z) given by
ha (z, z̄a) = 1
!a!
2"exp
!" (z " z̄a)
2
2! 2a
"and
hb(z, z̄b) = 1
!b
!2"
exp!" (z " z̄b)
2
2! 2b
",
(7)
the distribution of the distance between the surfaces hab(z) is
hab(z, z̄a + z̄b) =1
#2"
$! 2
a + ! 2b
% exp
&
"(z " (z̄a + z̄b))
2
2$! 2
a + ! 2b
%'
.
(8)
For the special case in which z̄a + z̄b = d0, the equilibriumdistance, we will call the distance distribution function hd0(z).
Of course, the Gaussian approximation is rather crude, andbecomes less useful when the forces between the surfaces arevery weak, because of the deviations from the real distributionin the tail of the Gaussian. When we measure the surfaceswith an AFM, we get a better description. In this casewe get a discrete set Sa of n ‘height sample points’ forsurface a,
Sa : za1, za2, . . . , zan. (9)
In the same way, we get a set Sb for the other surface,
Sb : zb1, zb2, . . . , zbn. (10)
Now we need a reference height for both surfaces, which weagain choose to be the mean height, given by
z̄a = 1n
n(
N=1
zaN and z̄b = 1n
n(
N=1
zbN . (11)
For a given separation z̄a + z̄b, we can now calculate theset giving the sum of the height sets, Sab, equivalent tothe previously given distance distribution function hab(z) forthe Gaussian case. It is
Sab : (za1 " z̄a) + (zb1 " z̄b), (za2 " z̄a)
+ (zb2 " z̄b), . . . , (zan " z̄a) + (zb n " z̄b). (12)
In the same way we define Sd0 to be Sab for which z̄a + z̄b = d0.In the remainder of the paper we will continue to use ha(z),hb(z), hab(z) and hd0(z), knowing that we can always use thesets of real measurement points Sa, Sb, Sab and Sd0 instead ifrequired. We can use the sets by directly putting them intoa numerical calculation, ‘binning’ them (as in a histogram)to obtain fewer data points before using them in a numericalcalculation, or fitting an analytical function to them and usingthis function directly.
707
A physical model to predict stiction in MEMS
az
Surface a
Figure 8. Gaussian distribution of surface heights.
Surface b
Surface a
az
bz
0
Figure 9. Modeling of surface roughnesses and equilibriumdistance.
distances. If we know this distribution, we can calculate thesurface interaction energy. This principle was the main pointof the previously referred to paper of van Spengen et al [22].
The next part covers the quest to find this distancedistribution function. The model allows us to find usefultrends, and be able to understand better what happens actuallyin a situation in which stiction is occurring, which effectsare important and which conditions do not have such a largeinfluence. Finally, we can define worst-case situations fordifferent environmental conditions and surfaces, and givesuggestions for engineering solutions alleviating the stictionproblems in MEMS.
The starting point is a quantitative description of roughsurfaces in contact. We define a MEMS device in whichtwo surfaces a and b coming together are possibly proneto stiction. When we bring the surfaces closer and closertogether, the first contact points will yield plastically due tothe large force per unit area. Only when we are so close that theforce can be fully counteracted by the material of the surface,equilibrium is reached, but by then the highest asperities arenot the only ones governing the surface interaction energyof the system. We get the situation of figure 9, in whichthere is a certain distance z̄a + z̄b between the mean positionsof the bottom surface z̄a and the top surface z̄b. Thestandard deviations of the surface heights are ! a and ! b,respectively.
The origin of the z-axis is at the mean height value of thelower surface (the plane where the complete interface would bein case the surfaces were not rough). We assume that surfacesapproaching each other will halt at an equilibrium distancez̄a + z̄b = d0.
The height distribution functions of the surfaces are ha(z)
and hb(z). If we have a function e(z) giving the interactionenergy per unit area, varying with the distance z between the
surfaces, we are interested in the distance probability densityfunction of the surfaces, because this function is going to giveus the amount of surface at a specific distance, and henceits influence on the total energy. With the configuration offigure 9, we obtain, from the height distribution functions,this distance probability function, hab(z). For the Gaussiandistribution, the calculation is as follows. Having surfaceswith distributions ha(z) and hb(z) given by
ha (z, z̄a) = 1
!a!
2"exp
!" (z " z̄a)
2
2! 2a
"and
hb(z, z̄b) = 1
!b
!2"
exp!" (z " z̄b)
2
2! 2b
",
(7)
the distribution of the distance between the surfaces hab(z) is
hab(z, z̄a + z̄b) =1
#2"
$! 2
a + ! 2b
% exp
&
"(z " (z̄a + z̄b))
2
2$! 2
a + ! 2b
%'
.
(8)
For the special case in which z̄a + z̄b = d0, the equilibriumdistance, we will call the distance distribution function hd0(z).
Of course, the Gaussian approximation is rather crude, andbecomes less useful when the forces between the surfaces arevery weak, because of the deviations from the real distributionin the tail of the Gaussian. When we measure the surfaceswith an AFM, we get a better description. In this casewe get a discrete set Sa of n ‘height sample points’ forsurface a,
Sa : za1, za2, . . . , zan. (9)
In the same way, we get a set Sb for the other surface,
Sb : zb1, zb2, . . . , zbn. (10)
Now we need a reference height for both surfaces, which weagain choose to be the mean height, given by
z̄a = 1n
n(
N=1
zaN and z̄b = 1n
n(
N=1
zbN . (11)
For a given separation z̄a + z̄b, we can now calculate theset giving the sum of the height sets, Sab, equivalent tothe previously given distance distribution function hab(z) forthe Gaussian case. It is
Sab : (za1 " z̄a) + (zb1 " z̄b), (za2 " z̄a)
+ (zb2 " z̄b), . . . , (zan " z̄a) + (zb n " z̄b). (12)
In the same way we define Sd0 to be Sab for which z̄a + z̄b = d0.In the remainder of the paper we will continue to use ha(z),hb(z), hab(z) and hd0(z), knowing that we can always use thesets of real measurement points Sa, Sb, Sab and Sd0 instead ifrequired. We can use the sets by directly putting them intoa numerical calculation, ‘binning’ them (as in a histogram)to obtain fewer data points before using them in a numericalcalculation, or fitting an analytical function to them and usingthis function directly.
707
Object B
Object A
Roughness of Surface B
Roughness of Surface A
14
At the micro-scale, the forces associated with the stiction effect are often greater than other micro-forces.
As a result, if stiction is present in a micro-system, it can dominate the system. This usually has negative effects, such as micro-objects sticking together with no way to separate them, or high amounts of dissipative loss between two objects in sliding contact.
Stiction is an adhesion force that will occur ‘upon contact’ between objects, and will keep the two objects in contact indefinitely, even if the initial force that brought the two objects together is gone.
Stiction is directly proportional to surface area of contact
© N. Dechev, University of Victoria
What is Stiction?

15
Stiction will occur upon contact between micro-objects, so a good question may be:
Why did that contact occur in the first place?
Electrostatic forces
Fluid surface tension effects due to the drying process after the HF release of sacrificial layers
Shock loading or rapid acceleration that can bring two surfaces together
Inadequate stiffness of supporting micro-beams against gravity or normal operation
Desired contact by design
© N. Dechev, University of Victoria
The Causes of Stiction for MEMS
16
Once contact has occurred, there are four major phenomena that individually contribute to the ‘overall effect’ of stiction. These are:
Capillary ForcesHydrogen BridgingElectrostatic Forces Van der Waals forces
© N. Dechev, University of Victoria
The Causes of Stiction for MEMS

17
Capillary forces occur when there is a liquid-solid interface.
Example of capillary action between two rough surfaces:
© N. Dechev, University of Victoria
Stiction in surface micromachining
Figure 5. Capillary condensation between two contactingsurfaces. The meniscus curvatures are equal to the Kelvinradius; the contact angles satisfy Young’s equation.
a general form, which is valid for both the spreading and
the non-spreading condition [2]:
Es = C � 2Ab◆la cos �C (4c)
where ◆la cos �C is the adhesion tension, and C takes into
account the constant terms in (4a, b). The importance
of liquid mediated adhesion is supported by both stiction
and friction experiments. Stiction of released structures
can show a large dependence on the relative humidity
of air [11]. Friction measurements of silicon and silicon
compounds [12] show a strong dependence of the static
friction coefficient on relative humidity. In macrotribology
it is well known that adhesion of solids can strongly
depend on relative humidity [13]. This is caused by
capillary condensation. Liquids that wet or have a small
contact angle on surfaces will spontaneously condense into
cracks, pores, and into small gaps surrounding the points
of contact between the contacting surfaces. At equilibrium
the meniscus curvature is equal to the Kelvin radius [10]:
rK = ◆laV
RT log(p/ps)(5)
where V is the molar volume, p is the vapor pressure and
ps is the saturation vapor pressure. At room temperature,
◆laV /(RT ) = 0.54 nm for water [10]. The meniscus
curvature strongly depends on the relative vapor pressure
p/ps . For a relative humidity of 50% we find log(p/ps) =�0.69 and rk = �0.8 nm. At 100% relative humidity,
log(p/ps) = 0 and rk = ⇤ which means that a water film
can grow all over the surface. The amount of condensed
liquid in thermodynamic equilibrium is determined by both
the Kelvin radius and the contact angle. The meniscus
curvatures are equal to the Kelvin radius and the contact
angles satisfy Young’s equation (figure 5).
Capillary condensation can lead to a large increase in
the RCA of solids by means of liquid bridging. It can,
therefore, drastically increase the adhesion of those solids
that due to their roughness show a low adhesion in a dry
environment [13]. Models for the adhesion force due to
capillary condensed liquid have been developed in hard-
disk tribology [14–16].
2.2. Hydrogen bridging
Hydrophilic silicon surfaces, under atmospheric conditions
and temperatures well below 200 ⌅C, contain adsorbed
water layers. When two of these hydrated surfaces are
brought into close contact, hydrogen bonds may form
between oxygen and the hydrogen atoms of the adsorbed
water layers. Stengl et al [17] have calculated an adhesion
energy of about 100 mJ m�2 based on this bonding
model. From wafer bonding experiments [18, 19] and
stiction experiments [4, 20], adhesion energies between 60
and 270 mJ m�2 have been reported for hydrophilic surfaces(T < 200 ⌅C).
2.3. Electrostatic forces between mobile charges
Electrostatic attractive forces across the interface can arise
from a difference in work functions or from electrostatic
charging of opposed surfaces [21, 18, 22]. Difference in
the work function leads to the formation of an electrical
double layer by a net transfer of electrons from one surface
to the other. Contact potentials are generally below 0.5 V,
and the resulting surface charge densities are smaller than
1013 elementary charges per square centimetre [21]. At
small separations the electrostatic pressure between flat
surfaces is generally lower than the van der Waals pressure
[21]. Temporary charging can occur during processing
[22] or operation. Examples of this are tribocharging of
rubbing surfaces [15] and charge accumulation in insulators
of electrostatic operated micromotors [23]. Permanent
stiction is not expected due to these effects because the
non-equilibrium charging will relax in time.
2.4. Van der Waals forces
The van der Waals dispersion forces between two bodies are
caused by mutual electric interaction of the induced dipoles
in the two bodies. Dispersion forces generally dominate
over orientation and induction forces except for strongly
polar molecules [24]. The interaction energy per unit area
due to van der Waals interaction between two flat surfaces
in the non-retarded regime (d < 20 nm) is given by [10]
EvdW = � A
12d2(6)
where A is the Hamaker constant and d is the distance
between the surfaces. For most solids and liquids, the
Hamaker constant lies in the range 0.4–4 ⇧ 10�19 J [10].For surfaces in contact a cut-off distance of d = d0,
slightly smaller than the interatomic distance, should be
used to calculate the adhesion energy. Using a universal
cut-off distance of d0 = 0.165 nm and Hamaker constants
calculated by the Lifshitz theory, a good agreement between
experimental values and adhesion energies calculated with
equation (6) is found for non-hydrogen-bonding, non-
metallic solids and liquids [10]. Equation (6) with d = d0can be used to predict the adhesion energy of a clean
hydrophobic silicon surface. However, the adhesion energy
strongly depends on the surface termination. Often this is
not exactly known. For pure silicon a Hamaker constant
of 1.1⇧ 10�18 J is given [21], yielding a adhesion energyof 1.1 J m�2 [10]. From wafer bonding literature [18]
and stiction experiments [3, 20], adhesion energies between
12 and 140 mJ m�2 are reported. The reported values
may be much lower than the theoretical value due to
hydrogen, fluorine or CHx termination of the surface [18]
and due to surface roughness. Compared to hydrophilic
387
Capillary Condensation Between Two Contacting Surfaces[Image from N. Tas, et al.]
Stiction due to Capillary Forces
18
The capillary forced developed between two parallel plates with a liquid between them, can be modeled as follows:
If the angle of the contact angle θc is less than 90˚, then a force F will exist between the two plates.
We can derive an equation for the force between the plates, based on the: wetted area, separation distance, liquid surface tension, and meniscus angle.
© N. Dechev, University of Victoria
Stiction due to Capillary Forces
N Tas et al
Figure 1. A thin layer of liquid working as an adhesivebetween two plates. ⌅C is the contact angle between liquidand solid in air, g is the liquid layer thickness, and A is thewetted area. A force F is applied to maintain equilibrium.
where �la is the surface tension of the liquid–air interface,
and r is the radius of curvature of the meniscus (negative
if concave). In figure 1, the liquid is between the plates
and the liquid contacts the solid at the fixed contact angle.
From simple geometry it follows that r = �g/2 cos ⌅C . In
equilibrium, an external force F separating the plates must
be applied to counterbalance the capillary pressure forces:
F = ��plaA = 2A�la cos ⌅C
g(2)
where A is the wetted area. Note that a positive force F
corresponds to a negative Laplace pressure. The pressure
inside the liquid is lower than outside and the plates are
pushed together by pressure forces. For stiction calculations
it is convenient to calculate the surface energy stored at the
interface that is bridged by a drop of liquid [2]. Consider
a drop of liquid placed on a solid, surrounded by air
(figure 2). In equilibrium, the contact angle between liquid
and solid is determined by the balance between the surface
tensions of the three interfaces. This balance is expressed
by Young’s equation [10]:
�sa = �sl + �la cos ⌅C 0 < ⌅C < � (3)
where �sa is the surface tension of the solid–air interface
and �sl is the surface tension of the solid–liquid interface.
Young’s equation is also valid for configurations other than
that of figure 2. The contact angle is the same on a curved
or irregular shaped surface, inside a capillary etc.
If the solid–air surface tension is smaller than the sum
of the liquid–air and solid–liquid surface tensions, then the
contact angle is larger than 0⌅ and the liquid will be non-spreading (figure 3).
If the solid–air surface tension is larger than the sum
of the liquid–air and solid–liquid surface tensions, then it
will be energetically favorable for the liquid to spread. The
contact angle will be equal to 0⌅. A drop bridging two
surfaces will form thin liquid films outside the bridged area
(figure 4).
Figure 2. Liquid drop (L) on a solid (S), in air (A). ⌅C is thecontact angle between liquid and solid in air.
Figure 3. Liquid bridging two solids. The liquid isnon-spreading. The solid is only covered in the bridgedarea Ab . At is the total facing area.
Figure 4. Liquid bridging two solids. The liquid isspreading. Outside the bridged area Ab , a thin liquid filmcovers the solid.
The total surface energy of the area between the plates
can be calculated by adding the surface tensions of the
solid–air, solid–liquid and liquid–air interfaces [2]. It is
assumed that the liquid is confined to a bridged area Ab,
which is smaller than or equal to the total facing areas At .
(4a) expresses the surface energy in the case of a spreading
liquid, (4b) that for a non-spreading liquid:
Es = 2�At
⌅�sl + �la
⇥� Ab�la
⇤= 2
�At
⌅�sl
+�la
⇥� Ab�la cos ⌅C
⇤(4a)
Es =�At�sa � Ab
⌅�sa � �sl
⇥⇤= 2
�At�sa
�Ab�la cos ⌅C
⇤. (4b)
In (4a, b) the energy of the liquid–air meniscus area is
neglected, which is a fair assumption if the gap g between
the plates is small, so that the meniscus area is small
compared to the bridged area. The total area At and the
surface tensions are constant. Therefore, the total surface
energy as a function of the bridged area can be written in
386
d
Surface Tension Between Plates[Image from N. Tas, et al.]

19
The pressure difference between the liquid-air interface is given by the equation:
Based on the above expression, the force between the two plates can be expressed as:
© N. Dechev, University of Victoria
Stiction due to Capillary Forces
where: ∆pla = pressure difference at liquid-air interface γla = surface tension of the liquid-air interface r = radius of curvature of the meniscus of liquid
where: A = Area between the two plates θc = contact angle between liquid and solid d = separation distance between plates
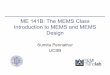
20
Modeling Stiction of Cantilever Beams (Wet Capillary-based Stiction)
Consider the problem of “drying” a MEMS chip, after the HF etch process (to dissolve the SiO2 layers).
In the process of being “dried”, a liquid meniscus will form between the beam and substrate. Hence, the beam will tend to be pulled down toward the substrate by capillary action, as shown:
© N. Dechev, University of Victoria

21
Hence, the critical beam length (beyond which it will be pulled down by capillary action), can be expressed as:
© N. Dechev, University of Victoria
where: E = young’s modulus of material t = beam thickness d = separation distance at anchor (shown as ‘g’ in diagram above) γla = surface tension of the liquid-air interface θc = contact angle between liquid and solid
Modeling Stiction of Cantilever Beams (Wet Capillary-based Stiction)
22
Some materials absorb water to a small depth just below their surface layer, and are said to have ‘hydrated surfaces’.
For example, hydrophilic (favorable to water) silicon surfaces, under atmospheric conditions and temperatures well below 200˚C, contain adsorbed water layers.
When two of these hydrated surfaces are brought into close contact, hydrogen bonds may form between oxygen and the hydrogen atoms of the adsorbed water layers in each of the surfaces.
This is a chemical bond that will remain, as long as the surfaces remain hydrated.
© N. Dechev, University of Victoria
Stiction due to Hydrogen Bridging

23
Electrostatic force can serve two functions in stiction:
Firstly, it can act over a distance to bring two micro-objects into contact.
Secondly, if there is a dielectric layer of material present between the two bodies in contact, such as silicon dioxide, or other material, the charge between the two bodies may remain for some time.
After the contact occurs, the electrostatic charges will dissipate or equalize over time, based on the material dielectric properties, resulting in no net force.
© N. Dechev, University of Victoria
Stiction due to Electrostatic Attraction
24
The Van der Waals forces between molecules are caused by mutual electric interaction (not-chemical bonds) between [1]:
▪ two permanent dipoles (Keesom force) ▪ a permanent dipole and a corresponding induced dipole (Debye force) ▪ two instantaneously induced dipoles (London dispersion force)
These bodies can be considered as molecules or for the case of MEMS, grains within a polycrystalline material.
The effect of Van der Waals force depends on a material’s properties, and it is usually noteworthy when strongly polar molecules or elements within materials are in contact.
© N. Dechev, University of Victoria
Stiction due to van der Waals Force
[1] http://en.wikipedia.org/wiki/Van_der_Waals_force

25
Modeling Stiction of Cantilever Beams (Dry Stiction)
Example: Consider the following case of a cantilever beam that is stuck down to the substrate:
The critical length of the beam (the length at which stiction will hold the beam down) can be found using the expression:
© N. Dechev, University of Victoria
N Tas et al
Figure 6. A cantilever beam of length l and thickness t ,anchored at a initial gap spacing g . The beam attaches thesubstrate at distance x from the anchor.
surfaces,the adhesion of hydrophobic surfaces might be
more sensitive to surface roughness because smoothing by
condensed water is absent.
3. Critical dimensions of beams and membranes
As soon as a structure touches the substrate, the total surface
energy is lowered. The structure will permanently stick to
the substrate if during peel-off the total energy of the system
reaches a minimum. The total energy of the system consists
of the elastic deformation energy and the surface energy,
which is a constant minus the adhesion energy. This energy
balance is easily made for a cantilever beam [3]. Figure 6
shows a cantilever beam of length l, thickness t and width
w, anchored at a initial gap spacing g.
The beam attaches to the substrate at diatance x from
the anchor. The elastic energy stored in the cantilever is
given by
Em = Et3g2w
2x3. (7)
The surface energy as a function of the attachment length
l � x is given by
Es = C � ✏s(l � x)w (8)
where ✏s is the adhesion energy per unit area. In
equilibrium, the total energy Em + Es is minimal. An
equilibrium detachment length xeq can be found, where the
decrease of the elastic energy is equal to the increase of the
surface energy, by increasing the detachment length x:
�Em
�x+ �Es
�x= 0. (9)
Substitution of (7) and (8) into (9) yields
3
2
Et3g2w
x4eq= ✏sw. (10)
The critical length of cantilever beams is smaller than the
detachment length xeq because before complete detachment
shear deformation at the tip will occur and the beam will
touch the substrate under an angle [3]. The deformation
energy at the point of snap back is about four times lower,
and for the critical length can be written
lcrit = 4
�3
8
Et3g2
✏s
. (11)
If the residual stress and the stiffening due to stretching are
neglected then the critical length of doubly clamped beams
and the critical radius of circular membranes show the same
dependence on t , g, E and ✏s . Only the numerical constant
in (11) should be changed, yielding a critical length of
doubly clamped beams that is about 2.9 times larger and
a critical radius of circular membranes that is about 2.4
times larger than the critical length of cantilevers [4]. To
obtain an idea of the strength of adhesion, we can evaluate
the critical length of cantilever and doubly clamped beams,
assuming an adhesion energy ✏s = 100 mJ m�2 and aYoung’s modulus of 150 GPa. Figure 7 shows the length
of the beams that are just kept down to the substrate, as a
function of beam thickness, for three different gap spacings.
The dotted line in figure 7(b) shows the critical length of
doubly clamped beams, if stiffening due to stretching of
the beam is taken into account [4]. Even at gap spacings
that are four times the thickness of the beam (t = 1 µm,
g = 4 µm), the critical length is only slightly increased by
this effect.
The figure shows that even 10 µm thick cantilevers
with a large gap spacing of 4 µm, have a critical length
of only 310 µm (880 µm for doubly clamped beams).
It is clear that stiction can easily cause malfunctioning in
many devices. (11) shows that the critical length depends
less than proportionally on the thickness, gap spacing and
adhesion energy. A reduction factor of 16 in the adhesion
energy only yields an increase in the critical length by a
factor of two.
4. Contact during fabrication
After wet sacrificial layer etching the released structure
is immersed in liquid. During the subsequent drying,
structures are pinned down to the substrate by capillary
forces. A theoretical description of these forces will be
given in the next paragraph.
4.1. Capillary forces of drying liquid
Consider a beam with a thickness much greater than its
width. In the final state of the drying process the liquid
volume approaches zero. If the tip of the beam touches
the substrate, a very small amount of liquid can bridge
a large area underneath the beam by forming an inside
meniscus, and pulling a part of the beam flat against the
surface (figure 8). This is the state of lowest total energy
as the liquid volume approaches zero.
The energy of adhesion by liquid bridging is found from
equation (4c). This final state is only reached if (i) the tip
touches the substrate and (ii) the surface energy plus the
deformation energy has a minimum for a detachment length
x smaller than the beam length l (see figure 8(a)). Condition
(ii) can be analysed by the substitution of the adhesion
energy of the liquid bridge per unit area, 2✏la cos ⌃C , into
equation (11). The critical length of cantilever beams to be
adhered to the substrate by the final small amount of liquid
is given by
lcrit = 4
�3
16
Et3g2
✏la cos ⌃c
. (12)
The critical length found by this analysis is almost the same
as that found by Mastrangelo and Hsu [2]. Mastrangelo
388
where: E = young’s modulus of material t = beam thickness d = seperation distance at anchor (shown as ‘g’ in diagram above) γs = adhesion energy per unit area
Cantilever Stuck Down on Substrate[Image from N. Tas, et al.]
26
Stiction Reduction Methods
Anti-Stiction by Supercritical CO2 Point Drying:
Avoid surface tension by relying on phase change with less surface tension than water-vapor.
Supercritical state: temp > 31.1 oC and pressure > 72.8 atm.
Step 1: change water with methanol
Step 2: change methanol with liquid carbon dioxide (room temperature and 1200 psi)
Step 3: content heated to 35 oC and the carbon dioxide is vented.
Free-standing cantilever beams up to 850 um can stay released.
© N. Dechev, University of Victoria
PT Diagram for Supercritical CO2 Drying[Image from C. Liu]

27
Stiction Reduction Methods
Anti-Stiction by Self Assembled Monolayer
Forming low stiction, chemically stable surface coating using self-assembly monolayer (SAM)
SAM file is comprised of close packed array of alkyl chains which spontaneously form on oxidized silicon surface, and can remain stable after 18 months in air.
OTS: octadecyltrichlorosilane (forming C18H37SiCl3)
© N. Dechev, University of Victoria
Self-Assembled Monolayers[Image from C. Liu]
28
Selected Stiction References
N. Tas, T. Sonnenberg, H. Jansen, R. Legtenberg, and M. Elwenspoek, “Stiction in Surface Micromachining”, Journal of Micromechanics and Microengineering, vol. 6, 1996, pp. 385-397
C. H. Mastrangelo, and C. H. Hsu, “Mechanical stability and adhesion of microstructures under capillary forces—part I: basic theory”, Journal of Microelectromechanical Systems, vol. 2, 1993, pp. 33-43
W. Merlijn van Spengen, R. Puers, and I. De Wolf, “A Physical Model to Predict Stiction in MEMS”, Journal of Micromechanics and Microengineering, vol. 12, 2002, pp. 702-713