Embed Size (px)
Citation preview
9.5.2008
1
ITS u gradskom prometu
prof. dr. sc. Hrvoje Gold
Zagreb, 09.05.2008.
Sveuĉilište u Zagrebu
Fakultet prometnih znanostiSpecijalistiĉki doktorski studij 2007/08
Organizacija predavanja
Naziv predmeta: 010 - ITS u gradskom prometu
Predavanja: 20+0 (5 bodova)
Datum i vrijeme predavanja:
– 09.05.2007, 17:00 - 20:00 sati (4 šk. sata)
– 10.05.2007, 08:30 - 12:00 sati (4 šk. sata)
Lokacija: Kabinet 2.7, Vukelićeva 4
Konzultacije:
prof. dr. sc. Hrvoje Gold – ponedjeljak 9:30-11.00 / srijeda 13:30-15:00
Vukelićeva 4, 2.7, 2380-225, [email protected], www.fpz.hr/~goldh
2

9.5.2008
2
Opis kolegija
• Inteligentni transportni sustavi (ITS)
• Modeliranje inteligentnog ponašanja (neizrazita logika,
neuronske mreţe, evolucijski algoritmi)
• Sustavi zasnovani na znanju
• Geoinformacijski sustavi. Praćenje kretanja i navigacija
vozila na digitalnim zemljovidima
• Sustavi raspodijeljene inteligencije. Povezanost
sveprisutnog raĉunalstva, osjetilnih mreţa, raĉunalnih
grozdova i spletova sa prometnim sustavima i procesima
• Poopćeni model ITS-a u sustavu grada
• Primjeri primjene ITS-a u gradovima
3
Inteligenti transportni sustavi
4

9.5.2008
3
ITS
Transporti promet
Inteligentni transportni sustavi
TELEMATIKA U PROMETU
Telekomunikacije i informatika
5
Telekomunikacije
Prijenos informacija na daljinu elektroničkim sredstvima
Telefon
Telefax
6

9.5.2008
4
Informatika
- Unos- Obrada- Pohrana- Predaja
- Objava- Pristup- Razmjena
INFORMACIJA
7
Telematski sustav
TRANSPORT
ITS
WORLD WIDEWEB GIS +GPS
INTERNET/INTRANET
8

9.5.2008
5
Pojam prirodne i umjetne
inteligencije
9
Društvo znanja
• Snaga društva odgovara znanju kojim raspolaţe
• Potreba za struĉnim i specijalistiĉkim znanjima
• Pojavom raĉunala omogućen razvoj umjetnih
(struĉnih/ekspertnih) sustava koji prikupljaju znanje
i donose zakljuĉke i odluke sliĉno ljudima
– Umjetna/Strojna inteligencija (Artificial/Machine
Intelligence – AI/MI)
10

9.5.2008
6
Inteligencija
• Svojstvo uspješnog snalaţenja u novim situacijama
• Uĉenje na temelju iskustva
• Sposobnost razumijevanja problema i naĉina
rješavanja problema
• Svrsishodno i prilagodljivo ponašanje u zadanim
okolnostima
• Sposobnost uĉenja, razmišljanja, prilagoĊavanja,
odluĉivanja, prepoznavanja, zakljuĉivanja,
predviĊanja
11
Umjetna inteligencija
• Umjetni sustavi inteligentnog ponašanja• Sposobnost prikupljanja i uporabe znanja
• Sposobnost postavljanja problema
• Sposobnost uĉenja, zakljuĉivanja, rješavanja problema
• Sposobnost obrade i razmjene znanja
• Umjetni sustav je inteligentan ako u
rješavanju spoznajnih zadataka postiţe iste
rezulate kao i ĉovjek
12

9.5.2008
7
Podruĉja umjetne inteligencije
• Sustavi za potporu u odluĉivanju
• Ekspertni sustavi
• Inteligentno pretraţivanje podataka
• Formalizmi i metode prikaza znanja
• Rješavanje problema i metode pretraţivanja
• Uĉenje korištenjem primjera
• Razumijevanje i obrada prirodnih (i umjetnih) jezika
• Automatsko programiranje
• Raĉunalni vid, raspoznavanje uzoraka i analiza scene
• Pribliţno raĉunanje (umjetne neuronske mreţe, genetski algoritmi, neizrazita logika)
• Robotika
13
Razvoj podruĉja umjetne
inteligencije
14

9.5.2008
8
Poĉeci razvoja podruĉja umjetne
inteligencije (1943-56)
– Warren McCulloch, Walter Pitts, A logical Calculus of the
Ideas Immanent in Nervous Activity, 1943
– Alan Turing, "The Imitation Game―/‖Turing Test‖,
Computing Machinery and Intelligence, 1950
– Electronic Numerical Integrator and Calculator (ENIAC)
projekt (Mauchly, Eckert, von Neumann), 1946
– Claude Shannon, Programming a Computer for Playing
Chess,1950
– Ljetna radionica o strojnoj inteligenciji na Dartmouth
College-u, umjetne neuronske mreţe i teorija automata,
1956 – McCarthy – Artificial Intelligence - AI
Uspon podruĉja (1956-1960‘)
– General Problem Solver (GPS) opći program
za rješavanje problema (Newell, Simon), 1957
– Programski jezik za obradu lista LISP
(McCarthy), 1958
– F. Rosenblatt – Perceptron – model neuronske
mreţe sa sposobnošću uĉenja, 1958
– J. A. Robinson - algoritam za dokazivanje
teorema predikatne logike, 1965

9.5.2008
9
Uspon podruĉja (1956-1960‘)
– Lotfi Zadeh – neizrazita (fuzzy) logika, pribliţno
zakljuĉivanje, 1965
– Arthur Bryson, Yu Chi Ho, algoritam uĉenja
neuronske mreţe povratnim rasprostiranjem
pogreške, 1969
– Newell, Simon, Human Problem solving, 1972
– Marvin Minsky, A Framework for Representing
Knowledge, 1975
Stagnacija istraţivanja (1960‘-‘1970)
– Marvin Minsky, Seymour Papert, ‗Perceptron‘,
oganiĉenja neuronskih mreţa, 1969
– The Lighthill Report UK, pesimistiĉna prognoza
mogućnosti primjene umjetne inteligencije, 1971

9.5.2008
10
– Ekspertni sustav DENDRAL - podrška u analizi
kemijskih stuktura (Feigenbaum, Buchanan,
Lederberg, Stanford University), 1969
– PROLOG – PROgrammation en LOGique
(Colmerauer, Roussel, Francuska, Kowalski,
UK), 1970
– M. Minsky – okvir (frame) – shema prikaza
znanja, 1975
Pojava ekspertnih sustava (‗1970-1985)
Pojava ekspertnih sustava (‗1970-1985)
– B. Buchanan, E. Feigenbaum – MYCIN –
model procjenjivanja u neizvjesnim
okolnostima, 1976
– EMYCIN ljuska (Feigenbaum, Shortliffe,
Stanford University), 1976
– Arthur Dempster, Glenn Shafer – teorija
zakljuĉivanja u sluĉaju neizvjesnog,
promjenjivog, kolebljivog, dvojbenog znanja,
1976

9.5.2008
11
– Hopfield, Neural Networks and Physical Systems with
Emergent Collective Computational Abilities,1982
– Kohonen, Self-Organized Formation of Topologically
Correct Feature Maps, 1982
– Rumelhart, McClelIand, Parallel Distributed Processing,
1986
– Prva meĊunarodna konferencija o neuronskim mreţama,
IEEE,1987
– Haykin, Neural Networks, 1994
– Programski alati - Neural Network, MATLAB Application
Toolbox (The MathWorks, Inc )
Obnova umjetnih neuronskih mreţa (1965- )
– Rechenberg, Evolutionsstrategien Optimierung
Technischer Systeme nach Prinzipien der
Biologischen Evolution, 1970
– Holland, Adaptation in Natural and Artificial Systems,
1975
– Koza, Genetic Programming: On the Programming of
the Computers by Means of Natural Selection, 1992
– Schwefel, Evolution and Optimum Seeking, 1995
– Fogel, Evolutionary Computation - Towards a New
Philosophy of Machine Intelligence, 1995
Evolucijsko raĉunanje (‗1970- )

9.5.2008
12
– Zadeh, Fuzzy Sets, 1965
– Zadeh, Fuzzy Algorithms, 1969
– Mamdani, Application of Fuzzy Logic to Approximate
Reasoning Using Linguistic Synthesis, 1977
– Sugeno, Fuzzy Theory, 1983
– Proizvodi široke potrošnje (perilica za posuĊe, stroj za
pranje rublja, klima ureĊaji, fotokopirni aparati)
– Sendai Subway System (Hitachi, Japan), 1986
– Negoita, Expert Systems and Fuzzy Systems, 1985
Pribliţno raĉunanje (1980‘- )
Pribliţno raĉunanje (1980‘- )
– Prva meĊunarodna konferencija o neizrazitim sustavima, IEEE, 1992
– Kosko, Neural Networks and Fuzzy Systems, 1992
– Kosko, Fuzzy Thinking, 1993
– Yager and Zadeh, Fuzzy Sets, Neural Networks and Soft Computing, 1994
– Cox, The Fuzzy Systems Handbook, 1994
– Kosko, Fuzzy Engineering, 1996
– Zadeh, Computing with Words — A Paradigm Shift, 1996
– Programski alati - Fuzzy Logic, MATLAB Application Toolbox (The MathWorks, Inc )

9.5.2008
13
Doba primjena (1995‘-)
– DART – planiranje sloţenih logistiĉkih zadataka u Zaljevskom ratu, 1991
– Šahovski program IBM Deep Blue pobjeĊuje Gari, 3 5:2 5, Kasparova, 1997
– RoboCup - nogometno prvenstvo robota, 1997
– PROVERB - rješavanje kriţaljki, 1999
– Breazeal, Sociable machines, Kismet, Leonardo izraţavanje emocija, 2000
– Web Ontology Language, 2004
– OpenCyc - vršna ontologija, 2006
– Šah - Deep Fritz 10 : Vladimir Kramnik = 4 : 2(2 pob i 4 remi), 2006
Doba primjena (1995‘-)
– Inteligentni transportni sustavi, 1995
– Dickmanns, samostalno vozilo (robot) Mercedes S-
klasa – Munchen - Copenhagen – aktivni vid/175
km/h/66 km bez intervencije vozaĉa, 1995
– ALVINN vidni sustav - NavLab - raĉunalom upravljano
vozilo, CMU, 1998
– Samostalni robot Nomad - potraga za uzorcima
meteorita na Antarktiku, 2000
– Probabilistiĉka robotika, Sebastian Thrun, 2005

9.5.2008
14
PRIMJERI
SAMOSTALNIH
INTELIGENTINH
VOZILA
http://www.darpa.mil/grandchallenge/
~ 230 km
~ 230.000 GPS
Najdulji prijeđeni putSandstorm ~ 12 km
DARPA Grand Challenge
Robot Vehicle Race 2004
Nagrada 1.000.000 USD
27
DARPA Grand Challenge
Robot Vehicle Race 2005
Stanley - Stanford30 km/h – 6:54h
~ 210 kmPrijavljeno 195
Započelo 23
Nagrada 2.000.000 USD
Sandstorm H1ghlanderStanley
28
Stiglo na cilj:5 vozila

9.5.2008
15
29
DARPA 3rd Grand ChallengeUrban Challenge November 2007
96 km gradske vožnje, za < 6 sati, poštujući
prometna pravila
Nagrada za 1. mjesto CMU
2.000.000 USD
1. mjesto Chevy Tahoe 4:10:20
4 vozila za < 4 sata
6 vozila stiglo na cilj
30
SUSTAV ZA MULTISENZORSKO IZVIĐANJE I NADZOR U
IZVANREDNIM SITUACIJAMA I ZAŠTITI OKOLIŠA – TP MZOŠ
Geodetski fakultetFakultet prometnih znanosti

9.5.2008
16
31
Inteligentna vozila
• 1 Road Condition Reporting – prilagodba na stanje kolnika
When a car using BMW's hazard system slips on ice, its sensors activate traction control Meantime, wireless technology alerts other cars in the area to the hazard
• 2 Adaptive Cruise Control – prilagodba na tijek prometa Luxury cars made by Audi, BMW, Infiniti, and others now use radar-guided cruise control to keep pace with the car ahead
• 3 Omnidirectional Collision System – izbjegavanje sudara
GM has built an inexpensive collision detection system that allows GPS-equipped cars to identify each other and communicate wirelessly
• 4 Lane-Departure Prevention – izbjegavanje promjene vozne stazeNissan has a prototype that uses cameras and software to detect white lines and reflective markers If the system determines the vehicle is drifting, it will steer the car back into the proper lane
• 5 Auto Parallel Park – samostalno parkiranje (NXT) (Lexus)Toyota has a technology that uses a camera to identify a curbside parking space and turns the wheel automatically to reverse you into the spot
• 6 Blind-Spot Sensors – upozorenje o mogućnosti sudara GM's GPS-based collision detectors can warn you when another car enters your blind spot
• 7 Corner Speed – prilagodba vožnje u zavojimaAn experimental Honda navigation computer anticipates upcoming turns and, if necessary, slows the vehicle to match predetermined safe speeds
Ekspertni sustavi
32

9.5.2008
17
Ekspertni sustav
• Prikuplja, organizira i koristi znanje struĉnjaka za rješavanje problema iz odreĊenog (uskog) podruĉja
• Ekspertni sustav
– znanje i struĉnost ĉovjeka izraţeni u obliku pravila (ako ... onda)
– baza znanja i mehanizam zakljuĉivanja su razdvojeni
– sustav moţe objasniti postupak zakljuĉivanja
33
Inţenjering znanja
• Naĉin prikupljanja (izvlaĉenja), prikaza i upotrebe znanja
• Izraţavanje struĉnjaka
– nepreciznim, dvosmislenim terminima (gotovo uvijek, obiĉno, ponekad)
– korištenjem lingvistiĉkih varijabli (visok, brz, teţak)
• Postupak prikupljanja, provjere i preradbe znanja je zamoran i skup
34

9.5.2008
18
Integracija inteligentnih sustava
• Sutavi temeljeni na pravilima
• Neizrazita (fuzzy) logika– raĉunanje sa rijeĉima
– koristi neizrazite, pribliţne vrijednosti koje opisuju znaĉenja, naĉin zakljuĉivanja i odluĉivanja
• Umjetne neuronske mreţe– uĉe na temelju iskustva i modificiraju postojeća ili
proizvode nova pravila
• Evolucijski sustavi– zasnovani na modelima prirodne selekcije i genetika
• Hibridni sustavi
35
Model produkcijskog sustava
Kratkotrajna memorijaDugotrajna memorija
Produkcijska
pravila
Baza podataka
Ĉinjenice
Zakljuĉivanje
Zakljuĉak
Ĉovjek rješava problem primjenom znanja (izraţenog produkcijskim pravilima i
pohranjenog u dugotrajnoj memoriji) na zadani problem opisan karakteristiĉnim
informacijama, ĉinjenicama (pohranjenim u kratkotrajnoj memoriji).
9.5.2008
19
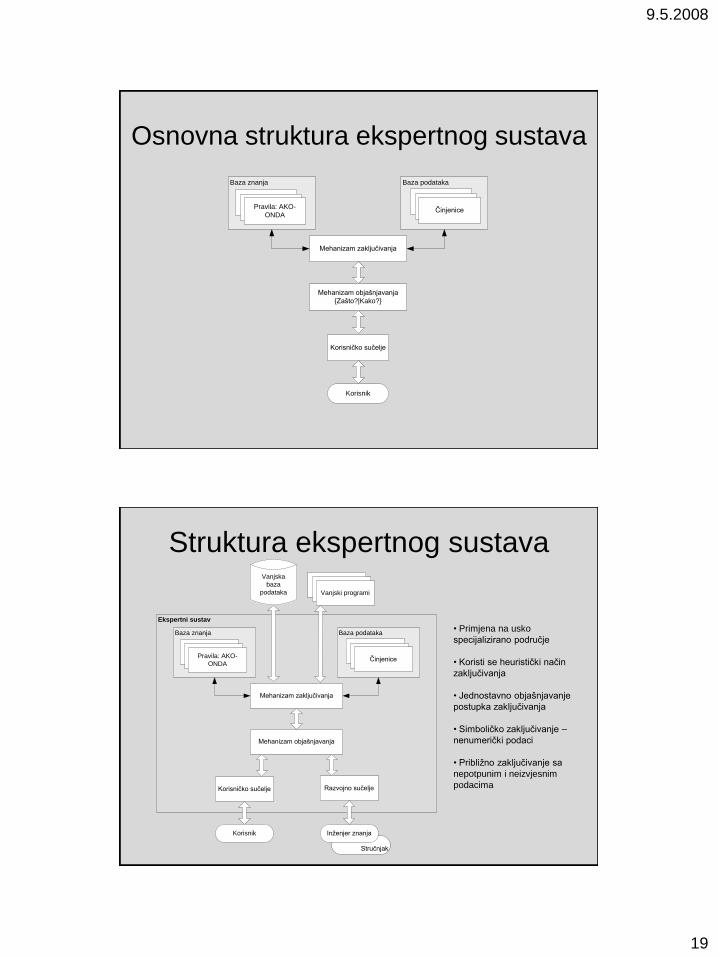
Osnovna struktura ekspertnog sustava
Baza podatakaBaza znanja
Pravila: AKO-
ONDA
Baza podataka
Ĉinjenice
Mehanizam zakljuĉivanja
Mehanizam objašnjavanja
{Zašto?|Kako?}
Korisniĉko suĉelje
Korisnik
Struktura ekspertnog sustava
• Primjena na usko
specijalizirano podruĉje
• Koristi se heuristiĉki naĉin
zakljuĉivanja
• Jednostavno objašnjavanje
postupka zakljuĉivanja
• Simboliĉko zakljuĉivanje –
nenumeriĉki podaci
• Pribliţno zakljuĉivanje sa
nepotpunim i neizvjesnim
podacima
Ekspertni sustav
Baza podatakaBaza znanja
Struĉnjak
Vanjski programi
Pravila: AKO-
ONDA
Baza podataka
Ĉinjenice
Mehanizam zakljuĉivanja
Mehanizam objašnjavanja
Korisniĉko suĉelje Razvojno suĉelje
Inţenjer znanjaKorisnik
Vanjska
baza
podataka

9.5.2008
20
Razvoj ekspertnog sustavaRazvojni tim ekspertnog sustava
Voditelj projekta
Korisnik sustava
Inţenjer znanja ProgramerStruĉnjak domene
Ekspertni sustav
Ciklus mehanizma zakljuĉivanja
Ĉinjenice
Pravilo: AKO A je
x ONDA B je y
Baza podataka
Baza znanja
Ĉinjenica: A je x
Ĉinjenica: B je y
Preklapanje Aktiviranje
A, B: Pojmovi ili stanja

9.5.2008
21
Primjer zakljuĉivanja
• Baza podataka poĉetno sadrţi ĉinjenice A, B,
C, D i E, a baza znanja 3 pravila:P1: AKO je Y istinito, I D je istinito, ONDA je Z istinito
P2: AKO je X istinito, I je B istinito, I je E istinito, ONDA je Y istinito
P3: AKO je A istinito, ONDA je X istinito
A
Y
E
B
X
D
Z
A
Y
E
B
X
D
Z
A
Y
E
B
X
D
Z
A
Y
E
B
X
D
Z
Geoinformacijski sustavi
(GIS)

9.5.2008
22
Što je GIS?
Organizirani skup
– sklopovske i programske opreme,
– zemljopisnih podataka i
– osoblja
s ciljem
– uĉinkovitog prikupljanja, pohrane, obrade, obnavljanja, rašĉlambe i prikaza
– svih oblika informacija vezanih uz prostor -georeferenciranih informacija
GIS
• Povezivanje prostornih podataka s zemljopisnim
informacijama o odreĊenom objektu na karti
• Informacije o objektu su pohranjene kao obiljeţja
objekta u bazi podataka
– širina ulice, godina posljednjeg asfaltiranja
– izraĉun duljine ulice
• Pronalaţenje prostornih odnosa izmeĊu objekata
na karti
• Crtanje karata nije osnovna namjena GIS-a

9.5.2008
23
GIS
Komponente GIS-a
Programska
pomagala +Baza
podataka
PRIKAZ
REZULTATA
Modeliranje
KORISNIKOKOLINA
Prostor, Objekti
IzvoĊenje prostornih operacija
MjestoZemljopisna
širina
Zemljopisna
duljina
Duljina ulica
(km)
Zagreb 45º 48‘ 49‖ N 15º 59‘ 33‖ E L-Zg
Split 43º 30‘ 22‖ N 16º 26‘ 46‖ E L-St
Rijeka 45º 19‘ 23‖ N 14º 27‘ 04‖ E L-Ri
Osijek 45º 33‘ 24‖ N 18º 41‘ 42‖ E L-Os
Zadar 44º 06‘ 50‖ N 15º 13‘ 39‖ E L-Zd

9.5.2008
24
Upiti na GIS
• Prostorno nezavisni:
– Prosjeĉna duljina ulica u navedenim gradovima?
– Ne koriste se zemljopisne koordinate
– Ne traţe se prostorni odnosi izmeĊu gradova
• Prostorno zavisni:
– Kolika je ukupna duljina ulica gradova u Dalmaciji?
– Koji se gradovi nalaze na meĊusobnoj udaljenosti
od 200 km?
– Koji je najkraći put koji prolazi kroz sve gradove?
GIS odgovori
• Što je na lokaciji ...?– Opis lokacije u bazi: naziv, poštanski broj, zemljopisne
koordinate
• Gdje se nalazi ... ?– Pronalaţenje mjesta ili podruĉja koje zadovoljava
postavljene uvjete: unutar 100 m sa lijeve strane ceste
• Što se promijenilo od ...?– Promjene u prostoru tijekom vremena
• Što ako ...?– Kako se izgradnja nove ceste odraţava na stanje okoliša
– Uz prostorne podatke poznavanje i matematiĉko logiĉkih modela

9.5.2008
25
Ulazno/izlazni podaci GIS-a
Prihvat i
ispravke
ulaznih
podataka
Pohrana i
obrada
podataka
Razvrstava
nje i analizaRezultati
Izvještaji
Karte
Snimke
Statistike
Podaci za ulaz u
modele
Podaci za druge
digitalne baze
podataka
Podaci s karata
Tabelarni podaci
Podaci terenskih
mjerenja
Podaci iz drugih
digitalnih baza
podataka
Snimke iz zraka i
svemira
Podaci stalnih ili
nepokretnih mjerenja
na tlu (GPS)
Digitalni podaci sa
satelita
DALJINSKA
ISTRAŢIVANJA
U L A Z
UPRAVLJANJE BAZOM PODATAKA
GEOGRAFSKI INFORMACIJSKI SUSTAV
Zahtjevi
korisnika
Statistiĉke
obrade
Drugi geografski
informacijski sustavi I Z L A Z
Osnovni modeli prostornih podataka
RASTERSKI
VEKTORSKI
9.5.2008
26
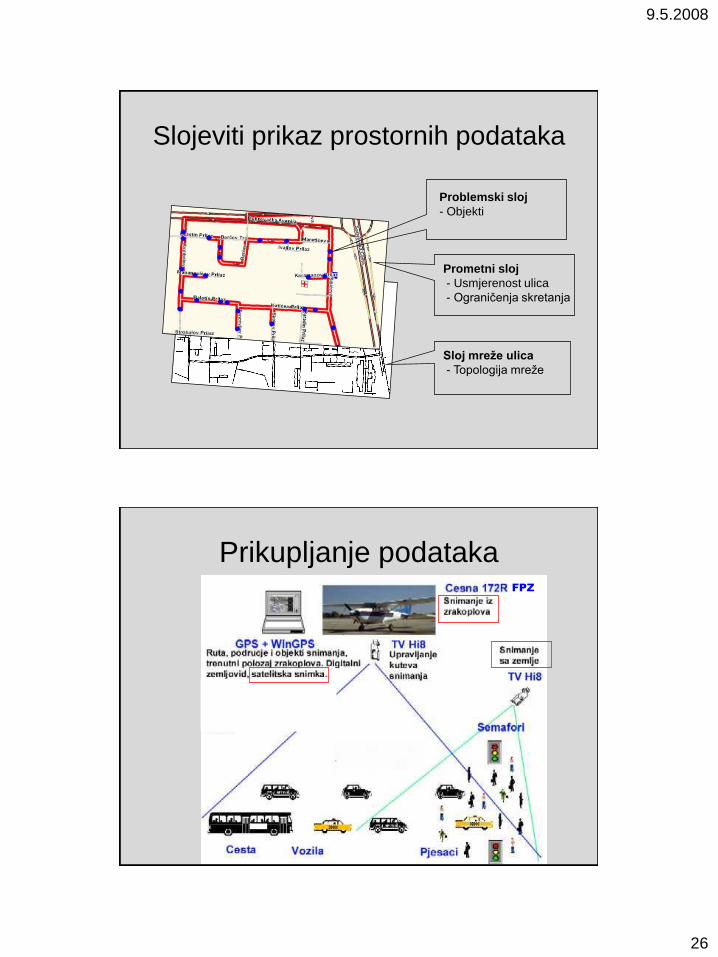
Slojeviti prikaz prostornih podataka
Sloj mreže ulica
- Topologija mreţe
Prometni sloj
- Usmjerenost ulica
- Ograniĉenja skretanja
Problemski sloj
- Objekti
Prikupljanje podatakaFPZ

9.5.2008
27
Satelitske snimke
NASA World Wind / Google Earth
Zagreb – 3D
Interaktivni atlas svijeta
Snimanje iz zrakoplova
Izvorna zrakoplovna
TV snimka 1998. god.
Geokodirana satelitska
snimka 1992. god.
Rezultat geokodiranja
TV snimke

9.5.2008
28
Sustav za zrakoplovno snimanje
Fakultet prometnih znanosti 1998
Video kamera
Daljinsko upravljanje
položajem kamere
Snimanje sa zemlje
Cestovna
signalizacija
GPS primjenik
Fakultet prometnih znanosti 1995

9.5.2008
29
Raskrižje Držićeva / Vukovarska, Zagreb, 1999.
Snimka u infracrvenom (termalnom) valnom području
58
Prikaz rezultata
Planiranje cesta
Usmjeravanje vozila

9.5.2008
30
Demo
Prikaz praćenja vozila
Putanja vozila
Botaniĉki vrt
HNK
Osjetilne mreţe u transportnom
sustavu

9.5.2008
31
Zadaće osjetilnih sustava
• Opaţanje i rašĉlamba signala/podataka iz okoline• Udaljenost
• Slika
• Zvuk
• Dodir
• Miris
• Okus
• ....
• Navigacija – preteţno vid
• Raĉunalni vid u voĊenju i nadzoru vozila
Mjerenje prometnih veliĉina
• Prometni tok (volumen), zauzetost, gustoća
• Broj, prisustvo, prolaz vozila
• Brzina pojedinog i skupine vozila
• Duljina reda
• Profil dolaznog toka
• Vremena putovanja
• Parova izvorno-odredišnih lokacija
• .....................
• Zdruţivanje podataka (data fusion)

9.5.2008
32
63
Znaĉajke senzora za motrenje
Kamera Lidar Radar Ultrazvuk
Valna duljina 10-7 - 10-6 10-6 10-3 - 10-2 10-3 - 10-4
Zavisnost o
vremenskim
uvjetima
Da, vidljivost Da, vidljivost Slaba Velika, vjetar, kiša
Detekcija loših
vremenskih uvjeta
Da Da Ne U odreĊenim
uvjetima
Razluĉivost
Horizontalna Visoka Visoka Srednja Vrlo visoka
Vertikalna Visoka Srednja Vrlo visoka Vrlo visoka
Udaljenost x
Vidno polje
Visok Visok Srednji Nizak
Trenutno mjerenje
Poloţaja + + + +
Brzine - - + (radijalne) + (radijalne)
Telematski opremljeno vozilo
Pokazivač Slika Zvuk Daljinski nadzor
Korisničko sučelje
Odlučivanje u stvarnom vremenu
Agenti donositelji odluka
Privremena
memorijaPrividni
senzori
Prikupljanje podataka GIS baza podataka
Komunikacijska sabirnica
GPS LIDAR IMSSenzori u
vozilu
Cestovna
elektronikaKamere
Senzori
Geografski
informacijski
sustav
9.5.2008
33
Osjetilni sustavi i funkcije
• Inteligentno vozilo u ITS sustavu
• Mikroraĉunala, mikroprocesori i mikrokontroleri
• Raspodijeljeni komunikacijski sustav za prijenos podataka u stvarnom vremenu
• OdreĊivanje udaljenosti izmeĊu vozila
• Bezkontaktna osjetila brzine
• Osjetila za prepoznavanje površine ceste
• Osjetila za naplatu vozila
• Sustavi raĉunalnog vida inteligentnog vozila
• Prepoznavanje prometne signalizacije
• Prepoznavanje prometnice
• Prepoznavanje drugih vozila
• Prepoznavanje pješaka
• Integracija procesnih modula inteligentog vozila
• Višeposredniĉki sustavi
• Multimedijska komunikacija u vozilu
• Komunikacijski sustav vozilo-prometnica
• Komunikacijski sustav vozilo-vozilo
• Sustavi satelitskog pozicioniranja i navigacije
• Usluge zasnovane na poziciji
• Tehnike inteligentog upravljanja vozilom
• Arhitekture sustava autonomnog kretanja
Pokretno raĉunalstvo
66

9.5.2008
34
67
Sveprisutno raĉunalstvo
• Pervasive = koji proţima
• Ubiquitous = svuda prisutan
INFORMACIJA – BILO KADA, BILO GDJE
Informacijsko društvo – Društvo znanja
68
Decentralizacija energije
• Strojevi i obrada energije su pokrenuli industrijsku ―revoluciju‖
• Prvotno proizvodnja i potrošnja energije na jednom mjestu
• Decentralizacija proizvodnje i potrošnje energije – motor s unutrašnjim sagorijevanjem, elektriĉna energija
• Razvoj novih primjena

9.5.2008
35
69
Decentralizacija raĉunalne snage
• Strojevi pojaĉavaju snagu ĉovjeka
• Raĉunala pojaĉavaju mentalne, intelektualne, sposobnosti ĉovjeka
• Doba velikih raĉunala– Statiĉka okolina
– Središnje upravljanje ureĊajima, aplikacijama i korisniĉkim suĉeljem
• Doba osobnih raĉunala
• Doba sveprisutnih raĉunala – Inteligentni informacijsko–komunikacijski moduli
– cluster/grid – grozd/splet
70
Razvoj sveprisutnih raĉunala
DOBA VELIKIH
RAĈUNALA
DOBA OSOBNIH
RAĈUNALA
(PC, Notebook)
DOBA SVEPRISUTNIH
RAĈUNALA
(PDA, HHA, Table PC, Grid)
1960 1980 2000

9.5.2008
36
71
Grid / Splet raĉunala
• Visoki stupanj integracije raĉunalnih sustava brzim komunikacijskim mreţama
• Na zahtjev:– Procesna moć
– Memorijski prostor
– Podaci
– Programi
• Sveopća virtualizacija (prikrivenost izvedbe sustava) raĉunalnih usluga
• Raĉunalni ekosustav – proizvodnja, razdioba i potrošnje
72
Okolina sveprisutnog raĉunalstva
SVEPRISUTNO
RAĈUNALSTVO
UREĐAJI / TEHNOLOGIJE
PRIMJENE / USLUGE
UGRAĐENI
SUSTAVI
POKRETLJIVOST
INTERNET / BEŢIĈNE MREŢE
NOVE VRSTE
UREĐAJA
USLUGE S
DODANOM
VRIJEDNOŠĆU
DIGITALNI
SADRŢAJI
RASTUĆA RAĈUNALNA
ZAJEDNICA
POVEZANOST
BEZ GRANICA
SVEPRISUTNOST
INFORMACIJA

9.5.2008
37
Poopćeni sustav ITS-a
73
Inteligenti transportni sustavi
Sustav opisan izrazima teorije općih sustava (Klir-ova paradigma)
Okolina
Unutarnji opis sustava
ST strukturom,
UC strukturom,
ponašanjem, djelovanjem,
veliĉinima i razinom
razluĉivanja
Ulazne
veliĉine
Izlazne
veliĉine
74

9.5.2008
38
Poopćeni sustav prijevoza i prometaPodsustav mreţe
prometnih koridora
NTC
Podsustav prilagodbe
TFE-NTC
TFA
Podsustav prometnog
entiteta
TFE
Podsustav prilagodbe
TNE-TFE
TNA
Podsustav prijevoznog
entiteta
TNE
Ulazne
veliĉineIzlazne
veliĉine
rArA tp ,rDrD tp ,
Z. Radić, I. Bošnjak, H. Gold, "Generalized ITS Modeling for Improved
Intermodal Interface", Proc. 5th World Congress on Intelligent Transport
Systems, Paper No. 2087 (CD-ROM), Seoul, Oct. 12-16, 1998 75
Prijevozna i prometna inteligencijaINTELIGENCIJA PODSUSTAVA MREŢE
PROMETNIH KORIDORA, NTC-I
INTELIGENCIJA PODSUSTAVA PRILAGODBE
PROMETNOG ENTITETA, TFA-I
INTELIGENCIJA PODSUSTAVA PROMETNOG
ENTITETA, TFE-I
INTELIGENCIJA PODSUSTAVA PRILAGODBE
PRIJEVOZNOG ENTITETA, TNA-I
INTELIGENCIJA PODSUSTAVA PRIJEVOZNOG
ENTITETA, TNE-I
Z. Radić, H. Gold ―Technological Infrastructure in Transitional ITS-Development
Policies‖ Proceedings of the 10th World Congress on Intelligent Transport Systems,
Madrid, November, 16-20, 2003, Paper No. 2726 (CD-ROM)
• osigurava djelotvornu prilagodbu prometnog entiteta na podsustav mreţe
prometnih koridora,
• sposobna je djelovati u stvarnom vremenu u sluĉaju nenadanih dogaĊaja,
• sposobna je odabrati prikiadni koridor za svaki prometni entitet,
• osigurava nuţne uvjete za prikljuĉivanje i odvajanje prometnog entiteta na
odnosno od prometnog sustava.
• uspostavlja unaprijed zadane modove prijevoza zavisno o ţivotnom
vijeku prijevoznog entiteta i odgovarajućim uvjetima prijevoza,
• osigurava promjenu modova prijevoza zavisno o ubrzanoj iii usporenoj
dobi transportnog entiteta,
• sposobna je stvarnovremeno djelovati u sluĉaju nenadanih dogaĊaja,
• osigurava nuţne uvjete za prikljuĉivanje i odvajanje prijevoznog entiteta
na odnosno od prijevoznog sustava.
• uspostavlja unaprijed zadane modove prijevoza zavisno o ţivotnom
vijeku transportnog entiteta i odgovarajućim uvjetima prijevoza,
• osigurava promjenu modova prijevoza zavisno o ubrzanoj iii
usporenoj dobi transportnog entiteta,
• sposobna je stvarnovremeno djelovati u sluĉaju nenadanih dogaĊaja,
• osigurava nuţne uvjete za prikljuĉivanje i odvajanje prijevoznog
entiteta na odnosno od prijevoznog sustava.
• podrţava programirani pomak prilagoĊenog prometnog entiteta,
• pruţa informacije o stanju odgovarajućih prometnih koridora,
raspodjeljena je duţ koridora,
• osigurava zadane prometne uvjete prilagoĊenom prometnom entitetu.
• osigurava obradu podataka i informacija o poIoţaju prostornih koordinata i
dobi prijevoznog entiteta,
• otkriva poremećaje i u stvarnom vremenu ispravlja ponašanje prijevoznog
entiteta,
• suraĊuje sa podsustavom prijevoznog entiteta i podsustavom prometnog
entiteta,
• štiti prijevozni entitet u sluĉaju nenadanih dogaĊaja 76