Embed Size (px)
Citation preview

Aleš Breznikar, Božo Koler
INŽENIRSKA GEODEZIJA

2
Kazalo 1 PODROČJE INŽENIRSKE GEODEZIJE......................................................................... 4 2 ZAKONSKE PODLAGE................................................................................................... 4 3 FAZE GEODETSKIH DEL PRI GRADNJI OBJEKTOV................................................ 5 4 OCENA NATANČNOSTI PRI GEODETSKIH DELIH V OKVIRU ZAKOLIČEVANJA 7
4.1 Nezanesljivost meritev ............................................................................................... 7 4.2 Toleranca.................................................................................................................... 8 4.3 Prenos varianc in toleranc .......................................................................................... 9 4.4 Zveza med gradbeno in mersko natančnostjo .......................................................... 10
4.4.1 Mejna mera in toleranca................................................................................... 11 4.4.2 Merska toleranca in nezanesljivost meritev ..................................................... 11
4.5 Natančnost zakoličevanja......................................................................................... 12 4.5.1 Zahtevana natančnost zakoličevanja ................................................................ 12 4.5.2 Natančnost zakoličevanja................................................................................. 12
4.6 Ocena natančnosti zakoličevanja ............................................................................. 13 5 POSTOPKI ZAKOLIČEVANJA TOČK IN NATANČNOST ....................................... 15
5.1 Metode zakoličevanja............................................................................................... 15 5.1.1 Ortogonalni postopek ....................................................................................... 16 5.1.2 Polarni postopek............................................................................................... 17 5.1.3 metoda preseka smeri ....................................................................................... 18 5.1.4 Ločni presek ..................................................................................................... 20 5.1.5 Metoda proste izbire stojišča............................................................................ 21 5.1.6 Določitev položajnih koordinat stojišča z dvema navezovalnima točkama..... 22 5.1.7 Določitev položajnih koordinat stojišča s Helmertovo transformacijo............ 25 5.1.8 Določitev položajnih koordinat stojišča z izravnavo ....................................... 29
5.2 Natančnost zakoličevanja......................................................................................... 32 5.2.1 Natančnost ortogonalne metode zakoličevanja ................................................ 32 5.2.2 Natančnost polarne metode zakoličevanja ....................................................... 34 5.2.3 Natančnost zakoličevanja po metodi preseka smeri......................................... 39 5.2.4 natančnost zakoličevanja po metodi ločnega preseka ...................................... 44 5.2.5 Natančnost zakoličevanja metode proste izbire stojišča .................................. 47
6. RAČUNANJE VOLUMNOV ZEMELJSKIH MAS........................................................... 52 6.1 Izračun volumnov pri linijskih objektih………………………………………………..52 6.1.1 Izračun površine prečnih profilov ………………………………………… …53 6.2 Izračun volumna zemeljskih del pri ploskovnih objektih .............................................. 54
6.2.1 Izračun volumnov na osnovi tahimetričnega posnetka terena ................................ 55 7 KONTROLNE MERITVE............................................................................................... 56
7.1 Stabilizacija točk ...................................................................................................... 56 7.2 Vrste deformacij in metode merjenja deformacij..................................................... 57 7.3 Deformacijski modeli ............................................................................................... 58
7.3.1 KINEMATIČNI DEFORMACIJSKI MODEL - HANNOVER...................... 58

3
7.3.2 PROGRAM MERITEV IN MERSKI POSTOPKI.......................................... 59 7.3.3 PRENOS (POVEZAVE) ZAHTEV NA (Z) GEOMETRIJSKIM MODELOM OBJEKTA ........................................................................................................................ 62 7.3.4 IZBIRA MERSKEGA POSTOPKA................................................................ 63 7.3.5 OSTALI KRITERIJI IN MEJNI POGOJI ZA IZBOR MERSKEGA POSTOPKA ..................................................................................................................... 64
8 TRENDI RAZVOJA........................................................................................................ 66 9 PREGLED STANJA V SLOVENIJI ............................................................................... 67 10 LITERATURA............................................................................................................. 68 11 VPRAŠANJA............................................................................................................... 68
Metode zakoličevanja
4
1 PODROČJE INŽENIRSKE GEODEZIJE Inženirska geodezija je relativno mlado in kompleksno področje geodezije. Kot o samostojnem področju v okviru geodezije se inženirska geodezija omenja šele po II. svetovni vojni, ko so se predvsem v gradbeništvu začeli večji projekti, ki so zahtevali nove, kvalitetnejše postopke izmere kot pa so bili do tedaj poznani. Pri vseh večjih objektih v industriji, visokih zgradbah, v izgradnji prometne in komunalne infrastrukture je geodet prvi in zadnji na gradbišču. Pred samo gradnjo je potrebno zagotoviti ustrezne podlage za fazo planiranja in projektiranja in hkrati predvideti tudi geodetska dela, ki jih bo potrebno izvesti v sklopu projekta. Pri tem je nujno potrebno sodelovanje tudi z ostalimi strokami, ki sodelujejo v procesu izgradnje določenega objekta. Glede na zateve po natančnosti gradnje posameznega objekta oziroma naprave je naloga geodeta, da izbere tehnično in ekonomsko optimalni merski postopek in merske priprave s katerimi bo izvedel meritve. Terminski plan izvajanja geodetskih del mora biti sestavni del terminskega načrta celotne izgradnje in mora biti usklajen z izvajalci drugih strok. Natančno časovno planiranje je posebno pomembno za objekte pri katerih geodetske oziroma fotogrametične meritve pomenijo končno kontrolo izdelka npr. gradnja mostov, viaduktov, sestavljanje avtomobilov, ladij, itd. Pri tem morajo biti geodetska dela zasnovana tako, da v čim manjši meri ovirajo proizvodni postopek. V fazi izgradnje objekta je naloga geodeta korektno izvesti vse postopke zakoličevanja in predvidenih kontrolnih meritev. Kljub temu da se zaradi intezivnosti del na samem gradbišču, velikokrat pojavijo oteškočeni pogoji za izvedbo meritev, se je potrebno držati predvidenih rokov za izvedbo posameznih meritev in hkrati zadostiti vsem predvidenim zahtevam po natančnosti. Zato je za geodeta, ki dela na področju inženirske geodezije, zelo pomembno natančno poznavanje geodetskih postopkov in senzorjev, ki se pri merjenju uporabljajo. Osnovo za meritve s področja inženirske geodezije predstavljajo geodetske mreže in z njimi povezani koordinatni sistemi. Geodetske mreže omogočajo, da so meritve opravljene z predvideno natančnostjo na celotnem področju gradbišča in v katerikoli fazi izgradnje objekta. Vse to zahteva od geodeta tudi dobro poznavanje postopkov razvijanja, izravnave in ocene natančnosti posameznih parametrov v geodetskih mrežah. Po končani gradnji je potrebno z geodetskega stališča opraviti še kar nekaj nalog. Potrebno je izvesti zemljiško-pravne postopke in evidentirati novonastalo stanje. Prav tako je potrebno registrirati spremembe v različnih katastrih komunalnih naprav. Posebno poglavje pa predstavljajo kontrolne in deformacijske meritve določenih objektov. Za objekte, pri katerih bi nepredvidene deformacije lahko imele katastrofalne posledice za okolico, so periodične kontrolne meritve predpisane z zakonom. Pri tej vsti meritev pogosto ni mogoče uporabiti rutinskih postopkov, ampak je potrebno meritve zasnovati na osnovi dobrega teoretičnega poznavanja posameznih geodetskih postopkov.
2 ZAKONSKE PODLAGE Geodezija v inženirstvu je prisotna predvsem pri izgradnji posameznih objektov, montaži in vzdrževalnih delih na strojni opremi in tehnoloških linijah. Geodezijo v inženirstvu srečamo tudi pri kontrolnih meritvah za potrebe določitve kvalitete določenega izdelka (kontrole v avtomobilski, letalski in ostali industriji) in premikov objektov v prostoru in deformacij na posameznih objektih. Posebnega zakona ali pravilnika, ki bi urejal geodetska dela, ki so povezana z geodezijo v inženirstvu nimamo. Geodezija v inženirstvu vendarle je oziroma bi morala biti prisotna v Zakonu o urejanju prostora, Zakonu o gradnji objektov in Zakonu o geodetski dejavnosti.

Metode zakoličevanja
5
Ustrezna natančnost izvajanja geodetskih del je največkrat predpisana z dovoljenimi odstopanji, ki so navedena v posameznih načrtih (projektni dokumentaciji) ali v ustreznih standardih (največkrat v mednarodnih ISO, evropskih EN ali nemških DIN standardih). Standarde sprejemamo na mednarodnem, regionalnem in nacionalnem nivoju. Mednarodni nivo standardiziranja predstavlja Mednarodna organizacija za standardizacijo, ki izdaja mednarodne standarde - ISO. Regionalni nivo standardiziranja, ki je pomemben za nas, predstavlja Evropski komite za standardizacijo - CEN, ki izdaja evropske standarde - EN. Nacionalni nivo standardiziranja predstavljajo uradi in organizacije v posameznih državah, katerih naloga je sprejemanje nacionalnih standardov. Pri sprejemanju standardov se teži k temu, da določen standard sprejmejo na čim višjem nivoju (mednarodni ali evropski standardi). Torej posamezne države dajejo prednost mednarodnemu in evropskemu standardiziranju pred nacionalnim. Glede na težnje po skupnem evropskem trgu in čim enostavnejšemu trgovanju med posameznimi državami, je seveda to povsem razumljivo. Mednarodne ali evropske standarde posamezne države po potrebi prevzamejo kot nacionalne standarde. V Sloveniji sprejema nacionalne standarde Urad za standardizacijo in meroslovje (USM), ki je bil ustanovljen v okviru Ministrstva za znanost in tehnologijo (danes Ministrstvo za šolstvo, znanost in šport).. Sprejemanje standardov v Mednarodni organizaciji za standardizacijo je organizirano v okviru posameznih tehniških komitejev. Predloge standardov pripravljajo v podkomitejih in delovnih skupinah. Standarde s področja geodezije v inženirstvu sprejemajo v Tehniškem komiteju 59 - Gradnja poslopij, v okviru katerega deluje podkomite številka 4, ki je bil ustanovljen leta 1947. S področja geodezije v inženirstvu lahko standarde razdelimo v sledeče tematske sklope: 1. Terminologija 2. Geodetski merski instrumenti in merske metode pri gradnji objektov 3. Ocena natančnosti in dovoljena odstopanja pri gradnji objektov 4. Preizkus geodetskih instrumentov V zadnjih letih je dan velik poudarek pripravi standardov, ki urejajo preizkušanje in rektificiranje geodetskih instrumentov v preizkusnih laboratorijih in na terenu. Tako je Mednarodna organizacija za standardizacijo pripravila predlog standarda za preizkus in določitev natančnosti geodetskih instrumentov na terenu. Poleg tega so v Nemčiji sprejeli standard DIN 18710: Geodezija v inženirstvu, ki je sestavljen iz štirih delov: Splošne zahteve, detajlna izmera, zakoličevanje in kontrolne meritve – merjenje deformacij. Poleg tega so za geodezijo v inženirstvu pomembni tudi DIN 18709: terminologija, okrajšave in simboli (poglavje statistika in izravnalni račun) in DIN 18723: Določitev natančnosti geodetskega instrumenta na terenu. Za geodeta, ki se ukvarja z geodezijo v inženirstvu je tudi značilno, da se srečuje s številnimi strokovnjaki drugih strok. Da se lahko geodet ustrezno sporazumeva z ostalimi strokovnjaki, mora seveda poznati tudi ustrezno strokovno terminologijo, ki se uporablja v posameznih strokah.
3 FAZE GEODETSKIH DEL PRI GRADNJI OBJEKTOV Geodetska dela pri gradnji objektov lahko v splošnem razdelimo na dela pred, med in po izgradnji objekta. Geodet je tako eden izmed prvih, ki je prisoten na gradbišču in tudi med zadnjimi, ki opravijo svoje delo na gradbišču. Med geodetska dela pred gradnjo objektov spadajo: 1. Izdelava topografskega načrta v ustreznem merilu, ki služi projektantom kot podlaga za izdelavo projektne dokumentacije. Predpisano merilo ali vsebina topografskega načrta se prilagaja potrebam investitorja oziroma projektanta. Pri izgradnji linijskih objektov se pred izgradnjo izdelajo tudi vzdolžni in prečni profili trase linijskega objekta.

Metode zakoličevanja
6
2. Projektiranje in stabilizacija položajne in višinske geodetske mreže za potrebe izvajanja geodetskih del v vseh fazah izgradnje objekta. Omenjeni geodetski mreži lahko uporabimo, kot osnovo za detajlno izmero terena za potrebe izdelave topografskega načrta, za zakoličevanje detajlnih točk objekta in kot mrežo za izvajanje kontrolnih meritev po izgradnji objekta, če seveda ustreza kriterijem, na osnovi katerih ocenimo kvaliteto določene geodetske mreže. 3. Izdelava ekspropriacijskega elaborata za potrebe pridobitve parcel, ki jih potrebujemo za izgradnjo objekta. 4. Izdelava Elaborata za zakoličevanje detajlnih točk objekta in Načrta geodetskih del pri izgradnji objekta. Elaborat za zakoličevanje detajlnih točk objekta izdelamo na osnovi projektne dokumentacije. V Elaboratu za zakoličevanje detajlnih točk objekta so zbrani podatki o položajni in višinski geodetski mreži, koordinate posameznih detajlnih točk, v ustreznem koordinatnem sistemu in zakoličbeni elementi z oceno natančnosti zakoličevanja posamezne detajlne točke. Poleg tega so priložene skice zakoličevanja posameznih detajlnih točk v ustreznem merilu. Načrt geodetskih del je sestavni del Mrežnega plana izgradnje posameznega objekta. Osnovni namen načrta geodetskih del je, da se v okviru gradnje predvidi čas, ki ga potrebujemo za izvajanje posameznih geodetskih del in ostale zahteve, ki so povezane z izvajanjem geodetskih del (proste vizure med določenimi točkami, izvajanje drugih aktivnosti v času izvajanja geodetskih del, itd). 5. Zakoličevanje detajlnih točk objektov in komunalnih vodov. Med gradnjo objektov izvajamo zakoličevanje posameznih delov objekta, kontrolne meritve, katerih osnovni namen je ugotovitev skladnosti izvedenih del s projektno dokumentacijo in snemanje komunalnih vodov za potrebe izdelave katastra komunalnih naprav in vodov. Po izgradnji objektov izvajamo predvsem sledeča geodetska dela: 1. Geodetske posnetke za izdelavo načrta izvedenih del in za potrebe reambulacije topografskih načrtov, ki so v pristojnosti države oziroma geodetske službe. 2. Izdelava Geodetskega elaborata po izgradnji objektov, v katerem so zbrani vsi podatki o stabilizirani geodetski mreži, podatki o izmeri in izravnavi geodetske mreže. Geodetski elaborat izdelamo za potrebe investitorja. 3. Dopolnitev ekspropriacijskega elaborata, če se je spremenil obseg gradnje in je bilo potrebno pridobiti dodatna zemljišča za potrebe gradnje objektov. 4. Kontrolne meritve, katerih namen je:
- ugotoviti skladnost zgrajenega objekta s projektno dokumentacijo, - preveriti kvaliteto izvajanja posameznih del na objektu, - določiti premike objekta v prostoru in deformacije, ki se lahko pojavijo na posameznih objektih.
Katere in v kolikšni meri izvajamo posamezne faze geodetskih del pri izgradnji objektov, je predvsem odvisno od velikosti in pomembnosti objekta.
Metode zakoličevanja
7
4 OCENA NATANČNOSTI PRI GEODETSKIH DELIH V OKVIRU ZAKOLIČEVANJA
4.1 Nezanesljivost meritev V inženirskih področjih in v geodeziji je natančnost merskih rezultatov označena s standardnim odstopanjem oziroma tudi kot nezanesljivost meritev. Enotno označevanje natančnosti meritev, omogoča lažje razumevanje med inženirji različnih panog.
merska vrednost xi
prava vrednost x~
x~
merski rezultat_
(srednja vrednost x)x
pravo odstopanje ηi
μx
sluc. od. iε
pop. iv
ix
sist. od. xΔ
x_
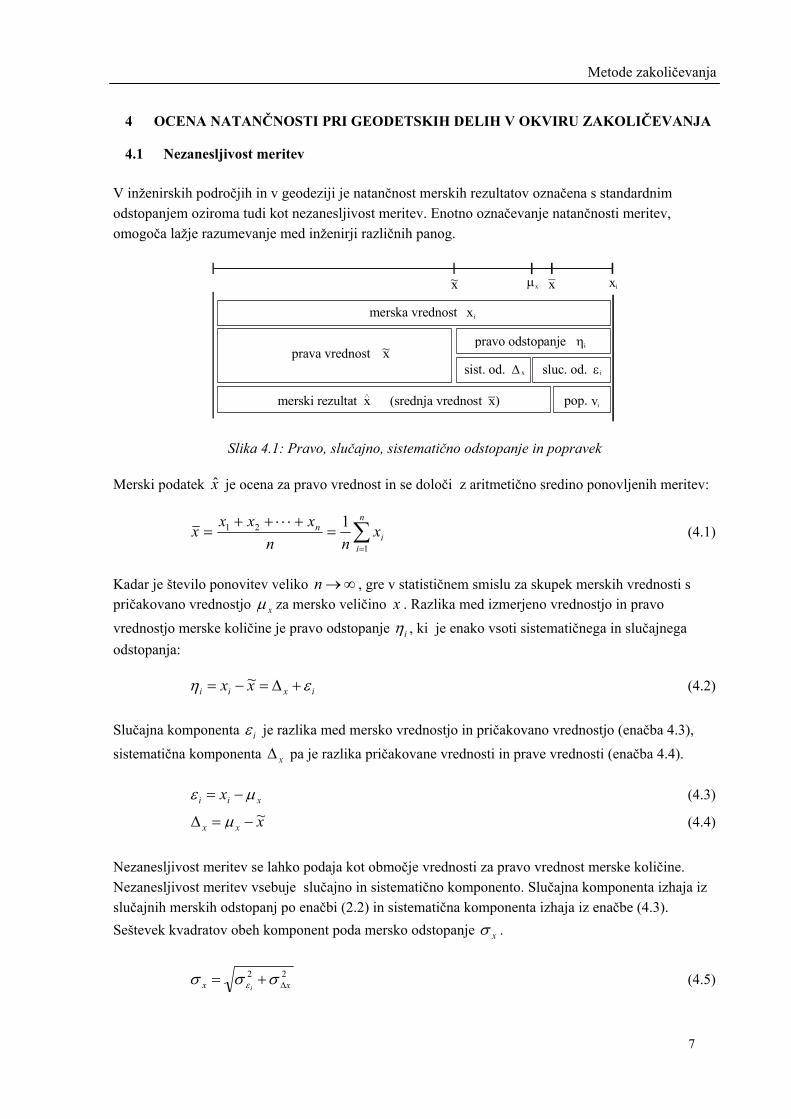
Slika 4.1: Pravo, slučajno, sistematično odstopanje in popravek Merski podatek x̂ je ocena za pravo vrednost in se določi z aritmetično sredino ponovljenih meritev:
∑=
=+⋅⋅⋅++
=n
ii
n xnn
xxxx1
21 1 (4.1)
Kadar je število ponovitev veliko ∞→n , gre v statističnem smislu za skupek merskih vrednosti s pričakovano vrednostjo xμ za mersko veličino x . Razlika med izmerjeno vrednostjo in pravo vrednostjo merske količine je pravo odstopanje iη , ki je enako vsoti sistematičnega in slučajnega odstopanja:
ixii xx εη +Δ=−= ~ (4.2)
Slučajna komponenta iε je razlika med mersko vrednostjo in pričakovano vrednostjo (enačba 4.3), sistematična komponenta xΔ pa je razlika pričakovane vrednosti in prave vrednosti (enačba 4.4).
xii x με −= (4.3)
xxx~−=Δ μ (4.4)
Nezanesljivost meritev se lahko podaja kot območje vrednosti za pravo vrednost merske količine. Nezanesljivost meritev vsebuje slučajno in sistematično komponento. Slučajna komponenta izhaja iz slučajnih merskih odstopanj po enačbi (2.2) in sistematična komponenta izhaja iz enačbe (4.3). Seštevek kvadratov obeh komponent poda mersko odstopanje xσ .
22xx i Δ+= σσσ ε (4.5)

Metode zakoličevanja
8
Sistematična komponenta Δ se lahko z razporeditvijo meritev, v nasprotju s slučajno komponento ε , vzdržuje na minimumu in se lahko zanemari. Sistematični ostanki izhajajo iz nezadovoljivega poznavanja korekcij in redukcij, ki jih lahko pojmujemo kot slučajna veličina. Podatek o nezanesljivosti meritev za merski rezultat je podan kot standardno odstopanje xσ , z navedbo območja vrednosti, v katerem z verjetnostjo α−=1P leži prava vrednost. V inženirski geodeziji, na primer pri zakoličenju, je pogosto zahtevana relativna mera natančnosti, ki medsebojno opiše položaj dveh točk. Iz tega izhaja relativna merska nezanesljivost Dx /σ , odvisna
od oddaljenosti med točkama ( 0>D ), ki se na primer nanaša na položajno natančnost točk, dolžinsko odvisno nivelirano višinsko razliko, izmerjeno razdaljo ali na prečno odstopanje pri merjenju smeri odvisne od oddaljenosti točke. Popolni merski rezultat se lahko poda:
xx σ± ali Dxx x ⋅± σ
x – srednja vrednost
xσ – standardno odstopanje D – oddaljenost med točkama Določitev nezanesljivosti meritev za inženirsko geodezijo je izpeljana večinoma iz od delodajalca podane merske tolerance MT .
4.2 Toleranca Pri merjenju poljubnih parametrov (dolžina, kot, naklon …) se le stežka doseže pravo vrednost s popolno natančnostjo. Zato v vseh primerih nastopajo nenatančnosti, ki so označene kot odstopanja in pri merjenju kot pogreški. Manevrski prostor, ki omejuje dopustno odstopanje, se v tehniki podaja kot toleranca. Po standardu DIN (Deutsches Institut für Normung) 18201 (Tolerance in gradbeništvo) morajo v gradbeništvu normirane tolerance omogočati funkcionalno povezovanje gradbenih delov zgradbe v surovem stanju in končno izgradnjo, kljub neizogibnim nenatančnostim tekom gradnje brez dodatnega prilagajanja. Tolerančne norme so vsebovane v pogodbi. Tolerance omejujejo odstopanja nominalnih mer veličin, oblik in položaja gradbenih delov ter zgradb (končne, merske in montažne mere). Tolerance se mora upoštevati tam, kjer je potrebno. Bistveno je tam, kjer lahko nastopijo merska odstopanja, ki lahko sprožijo negativne posledice.

Metode zakoličevanja
9
4.3 Prenos varianc in toleranc V večini primerov se rezultati geodetskih meritev uporabijo v naknadni obdelavi (na primer meritve kotov in dolžin za določitev posamezne točke). Pri tem so posamezne merske vrednosti obremenjene s slučajnimi odstopanji (slučajni pogreški), reprezentirane s standardnimi odstopanji merskih vrednosti. Odstopanja merskih vrednosti se prenesejo z zakonom o prenosu pogreškov na izračunano veličino. Podana je funkcija ),...,,,( 321 nxxxxfF = , katere spremenljivke so neodvisni vplivi ix . V primeru,
da funkcija ni linearna, se linealizira po Taylorju, pri čem se po linearnem členu razvoj prekine. Sledi totalni diferencial:
nn
dxxFdx
xFdx
xFdx
xFdF ⋅
∂∂
+⋅⋅⋅⋅⋅+⋅∂∂
+⋅∂∂
+⋅∂∂
= 33
22
11
(4.6)
V primeru, da se idx nadomesti z dopustnimi standardnimi odstopanji nσσσ ,....,, 21 , tako velja pri medsebojno neodvisnih merskih vrednostih ix zakon o prenosu varianc:
22
23
2
3
22
2
2
21
2
1
2n
nF x
FxF
xF
xF σσσσσ ⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+⋅⋅⋅⋅⋅+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
= (4.7)
Če σ ni podana, se lahko vstavi tudi ocenjena vrednost s . Pri koreliranih merskih vrednostih preide ta zakonitost v zakon o prenosu varianc s kovariancami po enačbi (2.8) in kovariančno matriko.
∑⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
221
22221
11221
......
...
...
nnn
n
n
XX
σσσ
σσσσσσ
kovariančna matrika (4.8)
V gradbeništvu, predvsem pri izračunih prileganja, nastopijo preproste vsote oziroma diferencialne funkcije v obliki:
nxxxxF ±±±±= ...321 (4.9)
Poseben primer nastopi, kadar je
1...321
±=∂∂
==∂∂
=∂∂
=∂∂
nxF
xF
xF
xF
in 12
1
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂xF
(4.10)
potem sledi
223
22
21 ... nF σσσσσ ++++= (4.11)

Metode zakoličevanja
10
Za σσσσσ ===== n...321 se dobi
nF σσ = . (4.12) Zakon o prenosu varianc se prav tako lahko uporabi za prenos toleranc. Pri tem se skupna toleranca poda z m posameznimi tolerancami iT in s pomočjo zakona o prenosu toleranc sledi:
22
33
2
22
2
11
2⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
∂∂
+⋅⋅⋅⋅⋅+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
∂∂
= mm
TxFT
xFT
xFT
xFT (4.13)
V primeru, da so parcialni odvodi enaki ena, potem velja poseben primer:
223
22
21 ... mTTTTT ++++= (4.14)
4.4 Zveza med gradbeno in mersko natančnostjo
Inženirska geodetska dela v gradbeništvu pri gradnji naprav vsebujejo večinoma zakoličevanja točk in kontrolne meritve gradnje. Pri tem so podane zahteve delodajalca glede natančnosti merskih rezultatov v splošnem kot tolerance, mejne mere nezanesljivosti meritev. Geodetski merski proces je karakteriziran s standardnimi odstopanji. Vedno ponavljajoče se vprašanje je razmerje med natančnostjo gradnje z natančnostjo meritev. Pri majhnih dimenzijah je to vprašanje pogosto določeno z natančnostjo merskih sredstev. V primeru, da so gradnje večjih dimenzij, je vprašanje razmerja gradbene tolerance z mersko natančnostjo pomembno, ker je od tega odvisna izbira merskih sredstev in tehnologij. Tukaj velja staro pravilo: »Ne tako natančno kot je mogoče, ampak tako natančno kot je potrebno«. Mersko tehnične naloge inženirske izmere so pogosto povezane s postavitvijo zgradb ali naprav. Pri tem se ločita naslednji kategoriji:
− geodetska dela zakoličevanja za pozicioniranje gradbenega objekta po projektu (imenovana tudi kot absolutna orientacija)
− mersko tehnične naloge za izvedbo gradnje ali za določanje realnih dimenzij gradbenih objektov oziroma kontrole pomembnih parametrov konstrukcije.
Za obe kategoriji so lahko potrebne različne zahteve natančnosti. Za izgradnjo objektov se poda skupna toleranca T .
222AM TTT += (4.15)
T – skupna toleranca (toleranca izvedbe, na primer gradbena toleranca zgradbe)

Metode zakoličevanja
11
MT – merska toleranca (merska in zakoličbena toleranca)
AT – izvedbena toleranca (izgradnja gradbenih delov, toleranca montaže)
4.4.1 MEJNA MERA IN TOLERANCA V gradbeništu se občasno uporablja tako imenovano zlato pravilo gradnje strojev, kjer naj bi znašalo razmerje 1:10 med mersko toleranco MT in toleranco končnega proizvoda.
TTM ⋅= 1,0 (4.16) Ker ni upoštevana statistična obdelava pogreškov, ampak je vzpostavljeno direktno razmerje med posameznimi tolerancami, je zahtevana visoka natančnost meritev.
4.4.2 MERSKA TOLERANCA IN NEZANESLJIVOST MERITEV Predstavo o toleranci in nenatančnosti meritev je potrebno strogo ločiti. Toleranca določi dovoljeno odstopanje za produkt (na primer zgradba), nenatančnost meritev pa opisuje natančnost meritve. Merska toleranca je pri podani skupni toleranci obravnavana kot delež p skupne tolerance V. Kadar je meritvi odobren delež
100%pp = (4.17)
skupne tolerance, sledi zveza:
( ) 2222 1 TpTTM ⋅−−= oziroma
( )211 pTTM −−⋅= (4.18)
Če je dopuščen delež 10 % skupne tolerance, je potem:
TTTM ⋅=−⋅= 44,09,01 2 (4.19)
Razmerje med mersko toleranco s skupno gradbeno toleranco na zgradbi potem znaša:
44,0==T
TV M (4.20)
Merske tolerance se ne sme zamenjevati z mersko negotovostjo (standardno odstopanje). Merska negotovost je odvisna od porazdelitvene funkcije pogreškov merskega sistema in s tem povezano verjetnostjo napake α . Pri stohastičnem proučevanju procesov skupaj z vsebovanim faktorjem 44,0=V je vpliv natančnosti meritev manjši kot 10% skupne tolerance. Pri tem je izpostavljeno, da je merska toleranca sestavni del gradbene tolerance. Uporabne vrednosti za delež p ležijo na intervalu %30%10 ≤≤ p .

Metode zakoličevanja
12
Pri podani skupni toleranci T je potrebno za projekt izmere določiti maksimalno dovoljeno standardno odstopanje xσ , da ne bo prekoračena merska toleranca. Pri podani merski nezanesljivosti
je merska toleranca podana:
xMT σλ ⋅= 2 (4.21)
Za faktor λ veljajo naslednje verjetnosti:
Interval zaupanja α−1
Verjetnost napake α
Faktor λ
68,26 % 31,74 % 1,00 95 % 5 % 1,96 99 % 1 % 2,58
99,7 % 0,3 % 3,00
Tabela 4..1
4.5 Natančnost zakoličevanja
4.5.1 ZAHTEVANA NATANČNOST ZAKOLIČEVANJA Natančnost zakoličevanja pomeni merjenje in označevanje oz. postavljanje točke, ki je odvisna od zahtevanega dopustnega odstopanja zakoličevanja MT in je določena s standardno deviacijo xσ . Za izpeljavo mejne vrednosti standardne deviacije σx za zakoličevanje ene točke velja za %95=S ;
%30=p in TTM ⋅= 71,0 :
5M
xT
=σ (4.22)
Dopustno odstopanje zakoličevanja je določeno kot del gradbenega odstopanja T.
4.5.2 NATANČNOST ZAKOLIČEVANJA Podatek standardnega odstopanja σ za zakoličeno točko se lahko poda za različne količine:
− vzdolžno in prečno odstopanje: lσ in qσ
− dolžinsko in smerno odstopanje: dσ in rσ
− odstopanje višinske razlike: hΔσ
− odstopanje v koordinatni smeri x in y: xσ , yσ

Metode zakoličevanja
13
− odstopanje položaja točke:
2,22
yxyxP σσσσ =+= ali (4.23)
22qlP σσσ += (4.24)
Določitev Pσ lahko tako sledi iz standardnih odstopanj v smeri osi x in y ali je določena iz natančnosti lege točke na podlagi dveh pravokotno postavljenih smeri σq in σl. Natančnost zakoličene točke se vedno nanaša na oslonilno točko v definiranem koordinatnem sistemu. Natančnost zakoličene dolžine se izraža iz medsebojne lege točk (razdalja sosednjih točk ali osi). Za položajno in višinsko zakoličevanje, kontrolo in kontrolne meritve je nezanesljivost meritev definirana kot standardno odstopanje σ sorazmerno odgovarjajoči referenčni dolžini. Primer:
Stopnja natančnosti 5, 100,3 −⋅≤d
yxσ pomeni, da bo za zakoličeno točko v oddaljenosti 50 m relativna
položajna natančnost v x in y smeri znašala 1,5 mm. Standardna odstopanja so vsebovana v izmerjeni merski veličini. Položajno natančnost se lahko poda tudi s standardnim odstopanjem Pσ za ravnino ali prostor (primer Helmertove transformacije) ter v tem primeru ni nujno potrebno podajati odstopanja za posamezne koordinatne osi.
4.6 Ocena natančnosti zakoličevanja Ocena natančnosti postavlja za zanesljivo izvedbo geodetskih meritev nujno potrebno predpostavko. V inženirski geodeziji obstajajo pogosto zahteve natančnosti dajalca del kot gradbene ali merske natančnosti, katerih obnašanje je teoretično utemeljeno skozi postopke zakoličevanja in uporabe instrumentarija. Pri tem v osnovi razlikujemo med pojmi:
− zahtevana natančnost (v gradbenem projektu) − pričakovana natančnost ( kot ocena) − dosežena natančnost (kontrolna)
Za zagotavljanje zahtevane natančnosti zakoličevanja točk je potrebno izbrati primerno metodo zakoličevanja. Znana so standardna odstopanja vseh delov postopkov zakoličevanja kot vplivi pogreškov. Iskano je pričakovano standardno odstopanje zakoličevanja točke. Razlikujemo:
1. oceno natančnosti sredine matematične funkcije postopka (na primer polarnega zakoličevanja), 2. oceno natančnosti zakoličevane vrednosti (na primer merjenje dolžine z merskim trakom)
skozi združevanje več odstopanj.

Metode zakoličevanja
14
Izbran postopek za zakoličevanje in merski instrumentarij vsebuje standardna odstopanja za različne vplivne veličine (meritve, standardna odstopanja oslonilnih točk, standardno odstopanje smernega navezovanja itd.). K pričakovanemu standardnemu odstopanju za ciljno funkcijo
),...,,,( 321 nllllfF = je po zakonu o prenosu pogreškov (poglavje 2.3) ugotovljeno
2ln
22
2
3
22
2
22
1321
σσσσσ ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⋅⋅⋅⋅⋅+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=n
lllF lF
lF
lF
lF
(2.25)
kjer so nllll ,...,,, 321 vplivne količine in ln321 ,...,,, σσσσ lll standardna odstopanja vplivnih količin. Rezultat je standardno odstopanje geometrične ciljne veličine (položajne koordinate in višine). Poznamo natančnosti, s katerimi je mogoče izvesti elementarne postopke zakoličevanja in iz tega ugotovimo pričakovane natančnosti zakoličene točke, dolžin ali smeri. Druga možnost so grafične rešitve z majhno konfiguracijo in velikim merilom pogreška, pri katerem je vpliv vsake posamezne veličine na rezultat raziskan, preden izvedemo geometrični seštevek k skupnemu rezultatu. V drugi točki se postavlja zakoličevanje smeri ali dolžine skupaj iz naključnih odstopanj meritev. Tako dobimo natančnost merske vrednosti iz standardnega odstopanja posameznih delovnih korakov, ki se lahko ocenijo in so na primer:
− rσ za merjenje smeri
− dσ za merjenje dolžin
− Mσ za označevanje točk
− Zσ centriranje instrumenta
− Vσ viziranje
Če izračunano standardno odstopanje ciljne funkcije, to ne odgovarja zahtevani natančnosti, se sprva določi i -te vplivne količine
ii li
lF lF σσ ⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
=)( , (4.26)
in pri tistih, ki kažejo največji delež, se potem eventualno uporabi bolj natančen merski postopek ali instrumentarij. Po drugi strani je mogoče na račun deležev vplivnih količin izračunati tudi zahtevano standardno odstopanje za posamezno vplivno količino, kadar je zahtevano, da vsi vplivni faktorji dajo enak prispevek. Ocena natančnosti je uporabljena pri pripravi meritev izmere položajnih gradbenih mrež, zakoličevanja in opazovanja zgradb. Pri tem se redko vključi vsaka posamezna točka. Namesto obsežnih obravnavanj natančnosti posameznih točk, se izberejo primerne (karakteristične) točke na objektu.

Metode zakoličevanja
15
Vsak predlog natančnosti je ocena. Vrednosti standardnih odstopanj so na podlagi praktičnih izkušenj bolj ali manj natančno ocenjene. Predlogi natančnosti dajo zgolj pojasnilo o razsežnosti pričakovanih standardnih odstopanj.
5 POSTOPKI ZAKOLIČEVANJA TOČK IN NATANČNOST Med najpomembnejše postopke inženirske geodezije spada prenos projekta v naravo, ki ga izvedemo z zakoličevanjem točk. Postopek zakoličevanja je ravno obraten postopkom izmere terena, v okviru katerih želimo izmeriti obstoječo situacijo. Postopek zakoličevanja je sestavljen iz naslednjih mersko tehničnih nalog:
- izračun ustreznih zakoličbenih elementov, - kontrola podlag za zakoličevanje, - izbor metode zakoličevanja vljučno z izborom instrumentarija ob upoštevanju zahtevane
natačnosti naročnika, - kontrola navezovalnih točk geodetske mreže iz katerih izvajamo zakoličevanje, - zakoličba in označevanje točk, - zavarovalne meritve, - neodvisna kontrola vseh zakoličenih in označenih točk, - predaja horizontalno in višinsko zakoličenih točk skupaj z zakoličbenimi podlagami izvajalcu
gradbenih del. Pri izračunu zakoličbenih elementov je potrebno v prvi vrsti definirati koordinati sistem v katerem se bo izvedla zakoličba. Razvitje ustreznega koordinatnega sistema v prostoru je domena geodetske stroke in teče po določenih pravilih. Koordinatni sistem razvijamo v obliki geodetskih mrež in mora zadostiti vrsto zahtev in kriterijev v odvisnosti od namena in obsega posamezne gradnje. Ker običajno pri zakoličevanju izhajamo iz točk obstoječe geodetske mreže je potrebno uskladiti načrte s koordinatnim sistemom v katerem je razvita geodetska mreža. V kolikor načrti niso narejeni v geodetskem koordinatnem sistemu uskladitev izvedemo z različnimi tehnikami transformacij. Ko imamo izračunane koordinate zakoličevanih točk v ustreznem koordinatem sistemu sledi izračun zakoličbenih elementov. V tej fazi je že potrebno izbrati metodo zakoličevanja in določiti točke geodetske mreže iz katerih se bo zakoličba izvedla.
5.1 Metode zakoličevanja Ena pomembnejših nalog v inženirski geodeziji je zakoličevanje točk načrtovanega projekta. Pod zakoličevanjem se razume prenos geometričnih veličin projekta v naravo. To pomeni, označiti in stabilizirati s potrebno točnostjo niz točk, ki označujejo lego in obliko projektiranega objekta v naravi. Pri zakoličbi običajno ločimo med zakoličevanjem v horizontalni ravnini in zakoličevanjem višin. Horizontalni položaj točk zakoličujemo na osnovi merjenja dolžin ali smeri oziroma kombinacije obeh postopkov. Zakoličevanje višin pa po pravilu izvedemo z metodo geometričnega nivelmana. Na zakoličevanje se lahko tudi gleda kot na inverzno nalogo izmere točk. Podane so koordinate izbranih točk in išče se lega teh točk v naravi. Za položajno zakoličevanje točk so primerni naslednji postopki: Metode horizontalne zakoličbe nadalje delimo v osnovne metode, kamor spadajo:

Metode zakoličevanja
16
- polarna metoda - ortogonalna metoda - metoda preseka smeri
in dopolnilne oz. izpeljane metode, ki so:
- linijska zakoličba - metoda ločnega preseka - metoda direktnega preseka linij - prosta izbira stojišča - druge kombinirane metode.
Osnovne metode zakoličevanja uporabljamo pri izvedbi t.i. glavne zakoličbe, v okviru katere zakoličujemo glavne točke objekta direktno iz geodetske mreže. Izbor metode je odvisen od naslednjih parametrov:
- razpoložljivega instrumentarija, - obsega zakoličevanja in oblike objekta, - načina gradnje, - pogojev na gradbišču, ki omogočajo izvedbo določene metode, - potrebne natančnosti zakoličevanja.
Kljub temu da vse osnovne metode smatramo kot enakovredne, pa se v večini primerov uporablja polarna metoda izmere. Dopolnilne metode zakoličevanja uporabljamo predvsem pri detajni zakoličbi, v okviru katere zakoličujemo detajne točke objekta. Pred zakoličevanjem je potrebno izračunati zakoličbene elemente (na primer smeri in dolžine za polarno metodo). Moderni elektronski tahimetri omogočajo izračun zakoličbenih elementov za metodo proste izbire stojišča in polarno metodo zakoličevanja iz shranjenih koordinat točk v spominu tahimetra. Pri metodi proste izbire stojišča elektronski tahimeter izračuna tudi koordinate prostega stojišča.
5.1.1 ORTOGONALNI POSTOPEK Ortogonalni postopek spada med klasične osnovne postopke zakoličevanja točk. Iz fiksno postavljene baze poteka zakoličevanje s pravokotnimi koordinatami. Pri tem je potrebna (slika 5.1):
− na primer poligonska stranica s fiksnima poligonskima točkama 145 in 146, ki določata zakoličbeno bazo AB ,
− pravokotne zakoličbene vrednosti ',' ii yx ,
− merjene so razdalje in pravi koti. Točke se zakoličujejo z ortogonalnimi zakoličbenimi elementi ',' ii yx , katerih izračun se nanaša na
zakoličbeno bazo oziroma poligonsko stranico s fiksnima točkama. Za večino praktičnih nalog je zadovoljivo, če se razdalje ',' ii yx določijo z merskim trakom in pravi koti v nadirju s kotno prizmo.
Če so postavljene večje zahteve po natančnosti zakoličevanja, se mora za grezenje na linijo oziroma

Metode zakoličevanja
17
merski trak uporabiti elektronski tahimeter ali teodolit pri zakoličenju pravega kota. Pod temi pogoji je priporočljiveje uporabiti polarno metodo.
y
x145
146
zakoličbena baza
0,00
36,2
8
21,3
722
,94
9,13
10,7
8
15,67
10,49
12,09
5,68A
B
Slika 5.1: Zakoličevanje s pravokotnimi koordinatami
Zakoličbene vrednosti se lahko neposredno prevzamejo iz zakoličbenih podlag, kadar se projektirane koordinate nanašajo na zakoličbeno bazo AB . Postopek je zelo primeren za zakoličevanje dolgih objektov (cest, vodov ...) iz poligonskega vlaka, na primer položajne gradbene mreže. Pogoj za uspešno zakoličevanje po ortogonalni metodi je neoviran pregled med točkama A in B , ki določata zakoličbeno bazo, najbolje raven ali rahlo nagnjen z nizko vegetacijo. Kontrola zakoličevanje na delovišču se vrši z merjenjem obodnih stranic in diagonal.
5.1.2 POLARNI POSTOPEK V praksi najbolj pogosto uporabljen in zelo prilagodljiv postopek zakoličevanja je polarni postopek. Kadar so točke iP (slika 5.2.) zakoličene iz polarnih koordinat z elektronskim tahimetrom, so tako iz
znanega ali prostega stojišča določene z dolžinami in smermi, ki so določene z zakoličbenim kotom. Za navezovalno smer se uporabi fiksna točka, na primer točka gradbene položajne mreže.
α1α2
α3
α41
2 3
4
A
B
d1
d4
d3d2
Slika 5.2: Polarno zakoličevanje

Metode zakoličevanja
18
Pri zakoličenju s polarnim postopkom je ena izmed fiksnih točk A uporabljena kot stojišče in druga B kot smerni priklep. Najprej sledi merjenje smeri Br k navezovalni točki B in izračun smernega
kota BAν iz podanih koordinat točk A in B po enačbi:
AB
ABBA xx
yy−−
= arctanν (5.1)
Potem se izračunajo polarni zakoličbeni elementi smeri iα in razdalje id k točki iP , pri čemer se
eventualno korigira razdaljo za faktor merila mΔ sistema upodobitve (na primer Gauß-Krügerjev sistem):
AP
ApPA xx
yy
i
ii
−
−= arctanν (5.2)
( )myyxxd AiAii Δ+⋅−+−= 1)()( 22 (5.3) BA
PAi
i ννα −= (5.4)
Moderni elektronski tahimetri omogočajo z odgovarjajočim programom izračun zakoličbenih elementov (smeri in dolžin) iz koordinat shranjenih v tahimetru. Kontrola zakoličevanja sledi iz zaokrožene mere diagonal ali zakoličevanja iz fiksne točke B . Z elektronskim tahimetrom se lahko zakoličene točke kontrolirajo s takojšnjo meritvijo. Primerjava izmerjenih koordinat s tistimi koordinatami iz projekta služi za presojo pravilnosti zakoličevanja in varuje pred grobimi pogreški.
5.1.3 METODA PRESEKA SMERI Metoda preseka smeri med klasične osnovne geodetske naloge in se bolj uporablja za določanje točk kot za samo zakoličevanje. Pri zakoličenju z metodo preseka smeri (tudi presek dolžin oz. kotov) so zakoličene točke določene iz dveh fiksnih točk z uporabo preseka kotov iα in iβ (slika 5.3). Zato je
ob uporabi postopka preseka smeri ureza smotrno uporabiti dva teodolita in hkrati z obema iz fiksnih točk določiti presek kotov. Podane so koordinate fiksnih točk A , B in koordinate iP objekta (slika 5.3). Izračunajo se
zakoličbeni podatki iα in iβ iz koordinat fiksnih točk in zakoličbenih točk, pri tem služijo fiksne
točke A , B tudi za medsebojno smerno orientiranje.

Metode zakoličevanja
19
α1
β1β2β4β3
α2α3α4
1
2 3
4γ1
γ2 γ3
γ4
A B
Slika 5.3: Zakoličevanje s pomočjo preseka smeri Najprej se iz danih koordinat izračuna smerna kota med fiksnima točkama A in B ter nato še smerne kote iz fiksnih točk A , B k točkam, ki se zakoličujejo iP :
AB
ABBA xx
yy−−
= arctanν (5.5)
Ai
AiPA xx
yyi
−−
= arctanν in (5.6)
Bi
BiPB xx
yyi
−−
= arctanν (5.7)
Iz tega izhajata zakoličbena kota:
BA
PAi
i ννα −= (5.8) AB
PBi
i ννβ −= (5.9)
ki ju je smotrno istočasno zakoličiti s pomočjo dveh teodolitov. Ker se pri tem postopku ne določajo dolžine, je natančnost zakoličevanja točke določena z merjenjem smeri. Možna je tudi uporaba preseka smeri s kombiniranim merjenjem dolžin in kotov kot poseben primer polarnega zakoličevanja iz dveh stojišč. Metoda preseka smeri se uspešno uporablja:
− tam, kjer se morajo geodetske točke postaviti daleč od objekta, − kjer konfiguracija terena in organizacija gradbišča ne dopuščata uporabe katere druge metode,
pri kateri bi bilo potrebno merjenje dolžin, − za zakoličevanje težko dostopnih točk.

20
5.1.4 LOČNI PRESEK Pri ločnem preseku se zakoličevanje izvaja kot pri postopku preseka smeri ureza iz dveh znanih točk. Zakoličbena točka je določena kot presečna točka krožnic z radijema Ad in Bd središčnih točk A in
B , ki sta istočasno stojiščni točki za zakoličevanje.
νAB
γA
B
α
β
P
P’
x
x
νAB
dB
dAB
dA
Slika 5.4: Zakoličevanje z metodo ločnega preseka
Zakoličbene elemente (razdalje) Ad in Bd se izračuna iz podanih koordinat fiksnih točk A , B in
koordinat zakoličbene točke iP :
( ) ( )21
21 AAA yyxxd −+−= (5.10)
( ) ( )21
21 BBB yyxxd −+−= (5.11)
Zakoličbene razdalje se lahko izboljšajo s faktorjem merila m , ki je podan kot količnik med razdaljo
*ABd izračunano iz koordinat med fiksnimi točkami ter izmerjena razdaljo ABd :
AB
AB
ddm
*
= (5.12)
( ) ( )22*ABABAB yyxxd −+−= (5.13)
mdd AiAikorigirana⋅= (5.14)
21
mdd BiBikorigirana⋅= (5.15)
Uporaba te metode je smiselna na ugodnem terenu, kjer so geodetske točke v bližini točk, ki jih je potrebno zakoličiti. Da se točka iP zakoliči čim bolj natančno, je potrebno meriti dolžini istočasno iz
obeh fiksnih točk. To je poglavitna razlika med meritvijo in zakoličevanjem točke z metodo ločnega preseka. Pri metodi zakoličevanja z ločnim presekom pa lahko pride do dvoumne situacije, saj presek krožnic predstavlja dve točki P in 'P . Zato je potrebno paziti, da se zakoliči prava točka P .
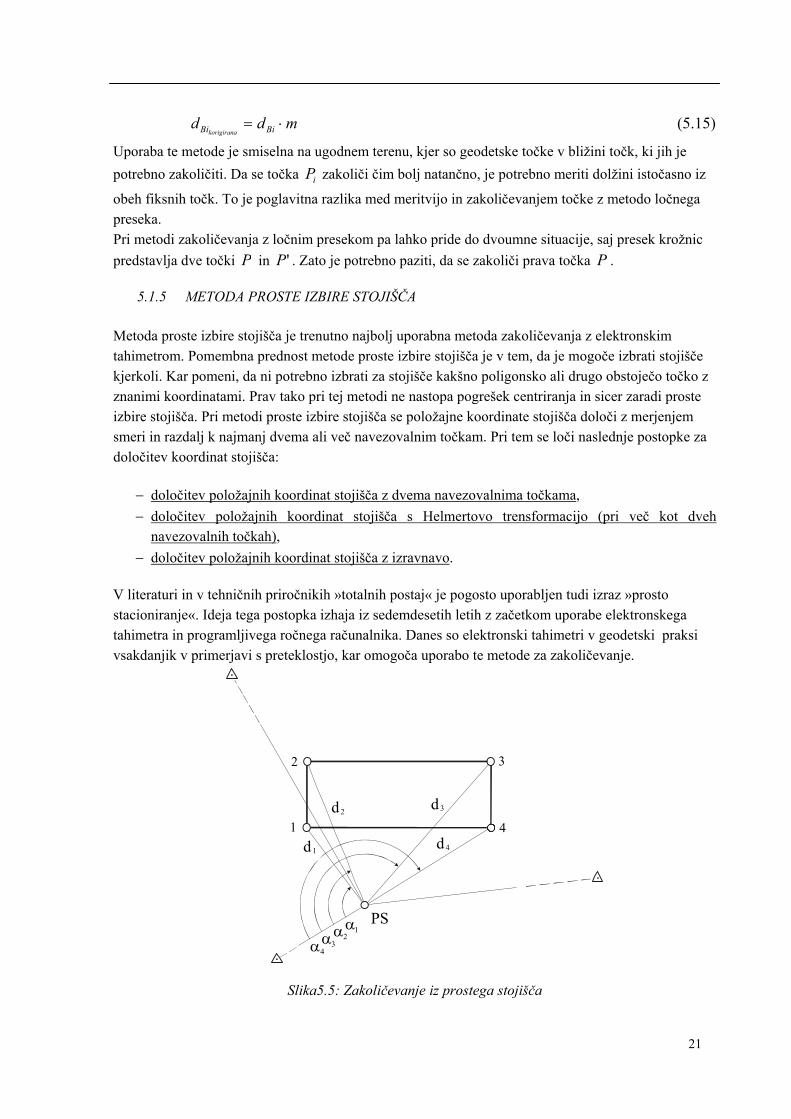
5.1.5 METODA PROSTE IZBIRE STOJIŠČA Metoda proste izbire stojišča je trenutno najbolj uporabna metoda zakoličevanja z elektronskim tahimetrom. Pomembna prednost metode proste izbire stojišča je v tem, da je mogoče izbrati stojišče kjerkoli. Kar pomeni, da ni potrebno izbrati za stojišče kakšno poligonsko ali drugo obstoječo točko z znanimi koordinatami. Prav tako pri tej metodi ne nastopa pogrešek centriranja in sicer zaradi proste izbire stojišča. Pri metodi proste izbire stojišča se položajne koordinate stojišča določi z merjenjem smeri in razdalj k najmanj dvema ali več navezovalnim točkam. Pri tem se loči naslednje postopke za določitev koordinat stojišča:
− določitev položajnih koordinat stojišča z dvema navezovalnima točkama, − določitev položajnih koordinat stojišča s Helmertovo trensformacijo (pri več kot dveh
navezovalnih točkah), − določitev položajnih koordinat stojišča z izravnavo.
V literaturi in v tehničnih priročnikih »totalnih postaj« je pogosto uporabljen tudi izraz »prosto stacioniranje«. Ideja tega postopka izhaja iz sedemdesetih letih z začetkom uporabe elektronskega tahimetra in programljivega ročnega računalnika. Danes so elektronski tahimetri v geodetski praksi vsakdanjik v primerjavi s preteklostjo, kar omogoča uporabo te metode za zakoličevanje.
α1α2α3α4
1
2 3
4
PS
d1 d4
d3d2
Slika5.5: Zakoličevanje iz prostega stojišča
22
S pomočjo dobljenih koordinat stojišča in danih koordinat zakoličbenih točk se potem izračunajo polarni zakoličbeni elementi za posamezne točke, ki se zakoličujejo. V sedanjem času vsi elektronski teodoliti z registratorjem podpirajo z integriranimi programi prosto izbiro stojišča z naslednjim obsegom lastnosti:
− samodejni izračun približnih koordinat, − Helmertova transformacija (podobnostna transformacija), − izračun standardnih odstopanj koordinat stojišča, − izračun popravkov po metodi najmanjših kvadratov, − trigonometrični prenos višin za določitev višin stojišč, − »Data-Snooping« za prepoznavanje napak.
Pri inženirskih meritvah je prosto izbiranje stojišča najbolj uporabljen postopek pri določanju točk in zakoličenju, ker omogoča izbiro stojišča, kjer je najbolj potrebno. Pri meritvah in zakoličenju mejnih točk in ploskovnih gradbenih objektov se lahko stojišče izbere znotraj ali zunaj gradbišča ali na primer v konkretni etaži zgradbe zaradi dobre vidljivosti. Pri običajnem polarnem posnetku je stojišče za teodolit znana fiksna točka. Za izračun koordinat ciljnih točk so izmerjene smeri orientirane, to pomeni, da se določa orientacijska neznanka. Pri prosti izbiri stojišča je mogoče izbrati prosto neoznačeno točko, katere koordinate se določijo neposredno v sklopu polarnega posnetka. Kot je bilo že razloženo, se to stojišče uporabi začasno, tako da koordinate tega stojišča kasneje nimajo nobenega vpliva na meritve. Za izvedbo kontrole in prepoznavanja pogrešenih merskih vrednosti ali pogrešenih navezovalnih točk je potrebna nadštevilnost, kar pomeni, da so koordinate prostega stojišča in orientacijske neznanke določene z izravnavo. Za matematično obdelavo postopkov se ponujajo tri zasnove, ki se v njihovem rezultatu le malo med seboj razlikujejo:
− izračun koordinat stojišča iz polarnih meritev k dvema navezovalnima točkama z nadštevilnostjo enega kota oziroma ene smeri,
− izračun koordinat stojišča iz polarnih meritev s pomočjo Helmertove transformacije, − izračun koordinat stojišča iz polarnih meritev z izravnavo smeri in razdalj.
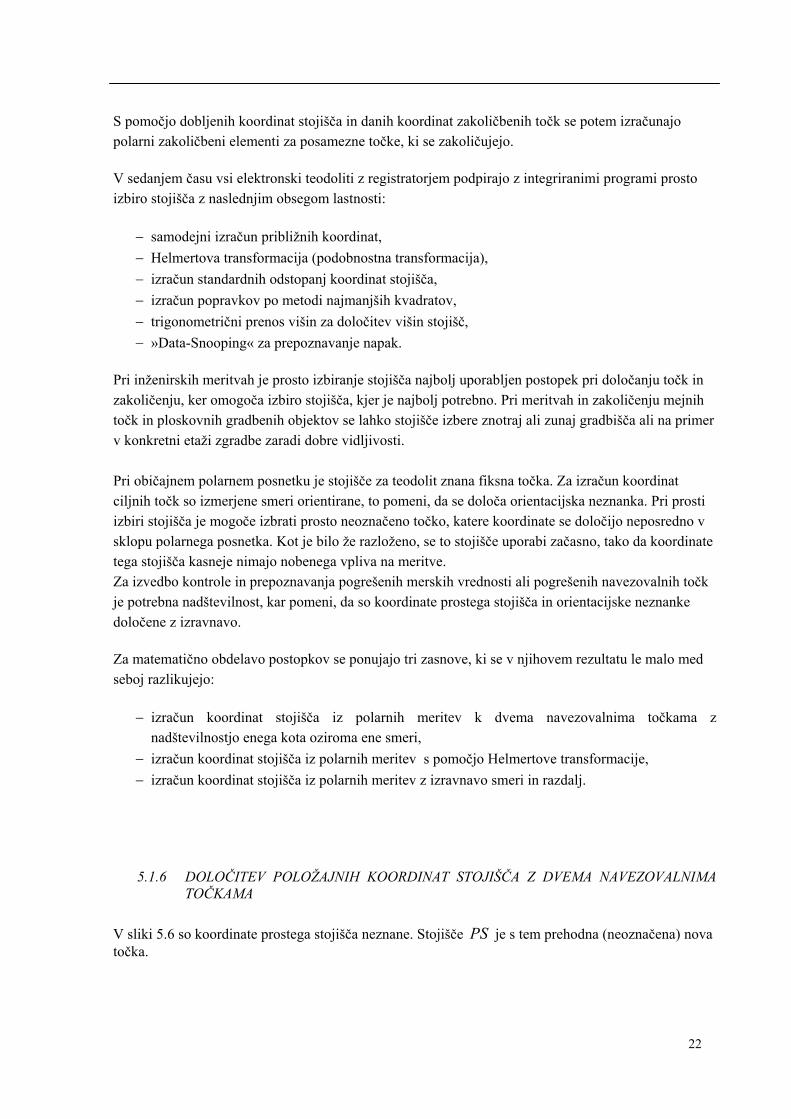
5.1.6 DOLOČITEV POLOŽAJNIH KOORDINAT STOJIŠČA Z DVEMA NAVEZOVALNIMA TOČKAMA
V sliki 5.6 so koordinate prostega stojišča neznane. Stojišče PS je s tem prehodna (neoznačena) nova točka.

23
α
PS
ν APSνA
B
ε
γ
||x
||x
A
B
y
x
xPS
yPSr A
d A,
dABAB
r B dB,r B B,
Slika 5.6: Določanje prostega stojišča PS s pomočjo dveh navezovalnih točk Ničelna smer se orientira proti fiksni točki in za meritev se izkaže naslednja merska situacija:
− Dano: koordinate navezovalnih točk A, B − Merjeno: smeri in dolžine BABA ddrr ,,, k navezovalnima točkama
− Iskano: koordinate nove točke PS Iz obeh meritev smeri na stojišču se določi kot γ med obema fiksnima točkama, ki skupaj z izmerjenima dolžinama tvori predoločen sistem. Ta predoločenost se izvrednoti v obliki faktorja merila in hkrati služi kot kontrola navezovalnih točk. Izračun koordinat stojišča se razčleni v naslednje računske korake:
1. Izračun razdalje in smernega kota med obema fiksnima točkama iz znanih kartezičnih pravokotnih koordinat
22* )()( ABABAB yyxxd −+−= (5.16)
AB
ABBA xx
yy−−
= arctanν (5.17)
2. Izračun razdalje ABd in kota γ med fiksnima točkama iz polarnih merskih vrednosti
AB rr −=γ (5.18)

24
γcos222 ⋅−+= BABAAB ddddd (5.19)
3. Izvede se izravnava izmerjenih dolžin izmAd in izmBd glede na merilo mreže s faktorjem merila
m
AB
AB
dd
vrednostimerskihizrazdalja
koordinatizrazdaljam*
== (5.20)
izmAA dmd ⋅= (5.21)
izmBA dmd ⋅= (5.22)
Izboljšana razdalja izmAdm ⋅ in izmBdm ⋅ ter izmerjeni kot AB rr −=γ ustrezajo neprotislovju
merila mreže, kjer za merilo velja kriterij zanesljivosti 0,9997 < m < 1,0003.
4. Po izračunu kota α se s pomočjo polarnega priklepa na fiksno točko A izračunata pravokotni koordinati Sx in Sy stojišča:
αγ sinsinBAB dd
= ⇒ γα sinsin ⋅=AB
B
dd
(5.23)
αcos2222 ⋅⋅⋅−+= AABAABB ddddd ⇒ AAB
BAAB
ddddd
⋅⋅−+
=2
cos222
α (5.24)
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⋅⋅⋅
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅⋅−+
⋅=⎟
⎠⎞
⎜⎝⎛= 222222
sin2arctan
2
sinarctan
cossinarctan
BAAB
BA
AAB
BAAB
AB
B
ddddd
ddddd
dd
γγ
ααα (5.25)
ανν += B
APSA (5.26)
PSAAAPS dmxx νcos⋅⋅+= (5.27) PSAAAPS dmyy νsin⋅⋅+= (5.28)
Izračun pravokotnih koordinat PSx in PSy stojišča s pomočjo polarnega priklepa na fiksno
točko B :

25
βγ sinsinAAB dd
= ⇒ γβ sinsin ⋅=AB
A
dd
(5.29)
βcos2222 ⋅⋅⋅−+= BABBABA ddddd ⇒ BAB
ABAB
ddddd
⋅⋅−+
=2
cos222
β (5.30)
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⋅⋅⋅
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⋅⋅−+
⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛= 222222
sin2arctan
2
sinarctan
cossinarctan
ABAB
BA
BAB
ABAB
AB
A
ddddd
ddddd
dd
γγ
βββ (5.31)
°±−= 180βνν BA
PSB (5.32)
PSBBAPS dmxx νcos⋅⋅+= (5.33)
PSBBAPS dmyy νsin⋅⋅+= (5.34)
Po določitvi koordinat stojišča se lahko potem iz tega stojišča zakoličuje iskane točke po polarnem postopku. Zakoličbeni elementi se pri tem izračunajo iz podanih koordinat zakoličbenih točk na sledeči način:
22 )()( PSiPSiPSi yyxxd −+−= (5.35)
PSi
PSiiPS xx
yy−−
= arctanν (5.36)
°±−+= 180PSA
iPSAi rr νν (5.37)
Pri tem postopku ostanejo koti nespremenjeni. Protislovje meritev se odpravi preko merila. Tukaj gre za podobnostno transformacijo z dvema identičnima točkama A in B.
5.1.7 DOLOČITEV POLOŽAJNIH KOORDINAT STOJIŠČA S HELMERTOVO TRANSFORMACIJO
Metoda proste izbire stojišča z uporabo dveh navezovalnih točk zagotavlja le neznatno kontrolo, saj je skupaj samo ena nadštevilna količina. Poleg tega je dopustno območje omejeno, v katerem morajo ležati zakoličene točke (slika 5.7). Iz tega razloga je smotrno uporabiti več kot dve navezovalni točki za določitev koordinat stojišča. Določitev stojišča potem sledi z uporabo 2-D Helmertove transformacije.

26
PS
N
R=2
R=1
Z
Slika 5.7 Pri Helmertovi transformaciji velja za meritve, da so brez pogreškov. Koordinate navezovalnih točk gredo kot nekorelirana opazovanja v izračun in oceni se preostala napaka (popravki) v transformacijskih točkah. S pomočjo prostega stojišča in poljubne ničelne smeri delilnega kroga je lokalni koordinatni sistem x, y definiran s prostim stojiščem kot ničelno točko oz. izhodišče. Predpostavka za to rešitev je, da so iz prostega stojišča k najmanj trem fiksnim točkam (transformacijskim točkam) vsakokrat izmerjene smeri in dolžine, pri čemer je ničelna smer poljubna. Iskane so koordinate stojišča, orientacija, merilo in koordinate novih točk. Določanje stojišča je predoločen sistem in predstavlja izravnavo. Sprva se k vsem navezovalnim točkam izvedejo meritve smeri in dolžin. S temi opazovanji se izračunajo koordinate v prosto izbranem krajevnem koordinatnem sistemu )','( yx . Izberejo se poljubne koordinate stojišča, to pomeni, da se lahko skozi stojišče postavi izhodišče in je potem:
='PSx 0 m, ='PSy 0 m. Smer 'x osi (ničelna smer) je lahko na primer ničelna smer delilnega kroga.
Potem se koordinate navezovalnih točk izračunajo sledeče:
iii rdx cos' ⋅= (5.38)
iii rdy sin' ⋅= (5.39)
2-D Helmertova transformacija se poenostavi v primeru, kadar izhodišče koordinatnega sistema leži v težišču ( TT yx , ) navezovalnih točk
nx
x iT
∑=
ny
y iT
∑= (5.40)
in analogno za lokalni koordinatni sistema, kjer je težišče navezovalnih točk ( TT yx ',' )

27
nx
x iT
∑='
'
ny
y iT
∑='
' (5.41)
pri tem je n število navezovalnih točk. Helmertova transformacija služi za določitev naslednjih štirih neznank:
− translacija v smeri x : xΔ − translacija v smeri y : yΔ
− faktor merila m − kot zasuka α
( ) ( )[ ] ( ) ( )[ ]
( ) ( )[ ]∑
∑ ∑
−+−
−⋅−+−⋅−=
22 ''''
''''
TiTi
i iTiTiTiTi
yyxx
yyyyxxxxa (5.42)
( ) ( )[ ] ( ) ( )[ ]
( ) ( )[ ]∑
∑ ∑
−+−
−⋅−+−⋅−=
22 ''''
''''
TiTi
i iTiTiTiTi
yyxx
xxyyyyxxo (5.43)
Vsota kvadratov transformacijskih parametrov mora ležati blizu vrednosti 1.
122 ≅+ oa (5.44) Iz parametrov a in o je mogoče izračunati faktor merila m in kot zasuka α iz enačb.
22 oam += (5.45)
aoarctan=α (5.46)
S pomočjo popravkov koordinat identičnih točk je mogoče določiti napetosti. Pri tem pomenijo mali popravki dobro prileganje.
iTiTiTix xyyoxxaxv −−⋅−−⋅+= )''()''(' (5.47)
iTiTiTiy yyyaxxoyv −−⋅+−⋅+= )''()''(' (5.48)
Vsota popravkov po komponentah se mora uničiti.

28
0' =∑i
ixv (5.49)
0' =∑i
iyv (5.50)
Koordinate točke zasuka:
TTT yoxaxx ''0 ⋅+⋅−= (5.51)
TTT yaxoyy ''0 ⋅−⋅−= (5.52)
Točka zasuka je enaka točki prostega stojišča.
0xxPS = (5.53)
0yyPS = (5.54)
Popravki in empirično standardno odstopanje enote uteži 0σ z n transformacijskimi točkami se izračuna iz normalnih enačb kot sledi:
( ) ( )42
2'
2'
0 −⋅
+= ∑ ∑
nvv
iyixσ (5.55)
Popravki so mera za kvaliteto transformacije ter se lahko uporabljajo za kontrolo in prepoznavanje grobih pogreškov. Boljša možnost kontrole je pomembna prednost v primerjavi z metodo določitve koordinat stojišča iz samo dveh navezovalnih točk. Pri tem iz tega sledi dvodimenzionalno (ploskovno) prilagajanje stojišča, ki ublaži mogoče napetosti v mreži. Ker pri tem koordinate stojišča ne nastopajo kot neznanke, se zato ne morejo določiti standardna odstopanja za koordinate. Uporaba več kot treh točk olajša odkrivanje – lokaliziranje grobih pogreškov v meritvah ali v danih koordinatah. Pogreški v meritvah in koordinatah novih točk seveda niso odkriti, ampak morajo biti kontrolirani z dvojnim posnetkom. Prednosti te metode izračuna se kažejo v tem, da niso potrebne nobene približne koordinate in v relativno preprostih algoritmih izračuna. Nasproti temu se morajo upoštevati tudi nekatere redke pomanjkljivosti. Višinske točke se ne morejo uporabiti kot navezovalne točke, ker ni mogoča meritev direktne razdalje. Pri grobih merskih pogreških ali pogrešenih koordinatah navezovalnih točk ali zamenjavi točk je le težko odkriti izvor pogreška. Natančnost zakoličevanja je tudi tukaj odvisna od lege stojišča in lege zakoličbenih točk. Splošno velja tudi tukaj, da naj ležijo stojišča in zakoličbene točke znotraj območja navezovalnih točk. Zakoličbeni elementi se pri tem izračunajo iz podanih koordinat zakoličbenih točk na sledeči način:
22 )()( PSiPSiPSi yyxxd −+−= (5.56)
29
PSi
PSiiPS xx
yy−−
= arctanν (5.57)
°±−+= 180PSA
iPSAi rr νν (5.58)
Za ta način zakoličevanja so zelo primerni teodoliti z možnostjo sledenja tarči (prizmi). Da lahko teodolit sledi tarči, je potrebna posebna 360° prizma. Teodolit se pri tem načinu upravlja preko posebnega zaslona, ki pošilja preko radijsko radijske zveze teodolitu podatke.
5.1.8 DOLOČITEV POLOŽAJNIH KOORDINAT STOJIŠČA Z IZRAVNAVO Metoda proste izbire stojišča z uporabo dveh navezovalnih točk zagotavlja le omejeno možnost kontrole faktorja merila. Ta pomanjkljivost se prepreči z uporabo večjega števila navezovalnih točk in s pomočjo uporabe Helmertove transformacije za določitev stojišča. Vendar s tem postopkom ni mogoče določiti standardna odstopanja za izračunane koordinate stojišča. Razen tega je potrebno uvesti pri Helmertovi transformaciji izračunane koordinate v lokalnem koordinatnem sistemu iz elementov meritev kot proste pogreškov, brez upoštevanja standardnih odstopanj izmerjenih razdalj in smeri. Te pomanjkljivosti se preprečijo z uporabo postopka za določitev stojišča z izravnavo. Prednosti postopka določitve stojišča s strogo izravnavo so:
− izravnava izmerjenih razdalj in smeri, − neposredna določitev koordinat stojišča v sistemu navezovalnih točk, − izračun popravkov za izmerjene količine, − izračun standardnih odstopanj za koordinate stojišča, − dodatni test za odkrivanje grobih pogreškov v opazovanjih in v koordinatah navezovalnih točk.
V nekaterih elektronskih tahimetrih so že vgrajeni odgovarjajoči programi za izravnavo. Za določitev stojišča z izravnavo so sprva potrebne približne koordinate za stojišče. Te se lahko določijo na primer z obema prej omenjenima postopkoma z dvema ali večimi navezovalnimi točkami. Sama izravnava sledi po standardnem postopku za mreže, opazovane z razdaljami in smermi. Pri tem so izmerjene razdalje pred njihovo uporabo v sistemu navezovalnih koordinat reducirane, pri čem so eventualno upoštevane naslednje redukcije:
− meteorološki popravki, − redukcija poševne dolžine v horizontalno, − redukcija zaradi višine nad elipsoidom (oziroma ravnine računanja), − redukcija zaradi preslikave, − redukcija zaradi merila sistema (na primer: mednarodni meter v legalni meter).
Reducirana opazovanja razdalj in smeri tvorijo skupaj s standardnimi odstopanji opazovanj model izravnave. Zraven opazovanj razdalj in smeri se lahko dodatno upošteva kot opazovanja koordinate navezovalnih točk z njihovimi standardnimi odstopanji, v nasprotnem primeru so koordinate upoštevane kot proste pogreškov.

30
Kot rezultat izravnane so koordinate stojišča PSx , PSy v sistemu navezovalnih koordinat in njihove
celotne variančno kovariančne matrike:
⎥⎦
⎤⎢⎣
⎡=
yyyx
xyxxxx qq
qqQ (5.59)
Kot naslednji rezultat izravnave so pridobljeni popravki za v izravnavo vpeljana opazovanja, iz katerih se potem izračunajo standardna odstopanja enote uteži,
unvPvT
−⋅⋅
=0σ (5.60)
kjer je
v vektor popravkov, P matrika uteži opazovanj, n število opazovanj, u število neznank.
Zakoličbeni elementi se pri tem izračunajo iz podanih koordinat zakoličbenih točk na sledeči način:
22 )()( PSiPSiPSi yyxxd −+−= (5.61)
PSi
PSiiPS xx
yy−−
= arctanν (5.62)
°±−+= 180PSA
iPSAi rr νν (5.63)
Pri zakoličenju je potrebno paziti na to, da so zakoličbene točke znotraj območja, ki ga tvori krožnica okrog navezovalnih točk. Primer: Izračun polarnih elementov zakoličevanja objekta in določanje točk s prosto izbiro stojišča. Dane so koordinate položajnih točk gradbene mreže (navezovalne točke) A, B, C in zakoličbene objektne točke Pi (slika 1). Izmerjene so bile na prostem stojišču smeri CBA rrr ,, in razdalje
CBA ddd ,, k navezovalnim točkam (slika 2). Iskane so koordinate prostega stojišča PS , polarne
koordinate ir in is točk objektov, merilo in kot zasuka.

31
Točka x [m] y [m]
A 320,00 280,00 B 488,14 630,31 C -74,33 553,88 1 85,00 750,00 2 60,00 750,00 3 60,00 700,00 4 85,00 700,00
Tabela .5.1: Koordinate točk
Navezovalna točka ir [gon] id [m]
A 64,3981 564,501 B 112,3251 457,278 C 0,0000 259,696
Tabela .5.2: Merske vrednosti k navezovalnim točkam
Lokalne koordinate v
sistemu stojišča Koordinate po Helmertovi
transformaciji Popravki Točka X
[m] Y
[m] x
[m] y
[m] xv
[m] yv
[m] A 1299,488 1478,506 320,006 279,987 0,006 -0,013 B 912,022 1448,735 488,151 630,315 -0,011 0,005 C 1259,696 1000,000 -74,325 553,888 0,005 0,008 PS 1000,000 1000,000 55,632 778,708 – –
Tabela .5.3: Določitev prostega stojišča in transformacija
Parametri Helmertove stransformacije znašajo:
− =a – 0,500419 in =o – 0,865701
− faktor merila =+= 22 oam 0,999929
− kot zasuka ==aoarctanε 266,6332 gon (orientacijska neznanka 0r )
Točka objekta iν [gon]
0rr ii −=ν [gon]
id [m]
1 350,7235 84,0902 41,07 2 309,6126 42,9794 29,04 3 303,5294 36,8962 78,83 4 322,7354 56,1022 84,01
Tabela .5.4: Polarne zakoličbene vrednosti

32
5.2 Natančnost zakoličevanja
5.2.1 NATANČNOST ORTOGONALNE METODE ZAKOLIČEVANJA 5.2.1.1 Natančnost zakoličevanja z uporabo kotne prizme Na natančnost zakoličene točke po ortogonalni metodi brez uporabe instrumentarija vplivajo naslednje negotovosti:
'' , ZyZx σσ vpliv grezenja v x' in y' smeri
SS yx '' ,σσ zakoličenih abscis in ordinat
Ry 'σ določenega pravega kota v y' smeri
zakoličbena baza
A
B
y’4y’3
y’2
x’4x’3
x’2
y’1
x’1
1
2 3
4
y’
x’
Slika 5.8: Elementi zakoličenja pri ortogonalni metodi Za obe koordinatni smeri in točko se podajo (slika 4.2):
2'
2'
2' Zxxx S
σσσ += (5.64) 2'
2'
2' Ryyy S
σσσ += (5.65) 2'
2'
2yxP σσσ += (5.66)
Pri tem bo Ry 'σ izračunan v odvisnosti od razdalje. 5.2.1.2 Natančnost zakoličevanja z uporabo elektronskega tahimetra (teodolita) Kadar je uporabljen za zakoličevanje instrumentarij, se natančnost poda za vzdolžno in prečno smer z upoštevanjem označevanja zakoličbene točke. Pri tem predpostavljamo, da je natančnost grezenja enaka natančnosti centriranja instrumenta.

Natančnost posameznih metod zakoličevanja
33
222
'2
MZyq σσσσ ++= (5.67) 2
222'
2 2'⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅+++=
ρσσσσσ yr
MZxl (5.68)
222qlP σσσ += (5.69)
Pri tem predstavlja člen
22'
⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅ρ
σ yr
pogrešek določanja pravokotnosti na podnožišču točke na zakoličbeni bazi AB .
A B
σqσP
σlP
y’
x’
x’P
y’P
Slika 5.9: Grafični prikaz pogreškov pri ortogonalni metodi Primer: Gradbena jama mora biti zakoličena z natančnostjo 5 cm od dane zakoličbene baze. Izvede se lahko zakoličevanje z dvojno pentagonalno prizmo, kadar nastopajo abcise do 50 m in ordinate do 30 m. Standardni odklon zakoličenega pravega kota s kotno prizmo znaša 40 mgon, kar odgovarja prečnemu odklonu 3 cm, 50 m oddaljeneni zakoličbeni točki. Pri določanju nadirja z grezilom lahko računamo na natančnost 2 cm. Merjenje razdalje z merskim trakom se lahko izpelje iz
ss ⋅⋅= −4100,5σ . Enačbe podajo:
6,435,10,25,2 22222222 =+++=+++= yRyZxxP SSσσσσσ
cm S tem je zakoličenje s kotno prizmo za majhne natančnosti (na primer gradbena jama) zadostno.

Natančnost posameznih metod zakoličevanja
34
5.2.2 NATANČNOST POLARNE METODE ZAKOLIČEVANJA Natančnost polarne metode zakoličevanja je odvisna od naslednjih vplivnih faktorjev:
− standardnega odstopanja koordinat stojišča in navezovalnih točk SSAA yxyx σσσσ ,,, ,
− natančnosti centriranja na stojišču v x in y smeri Zxσ , Zyσ .
− standardnega odstopanja merjenja razdalje dσ ,
− standardnega odstopanja merjenja smeri rσ ,
− standardnega odstopanja označevanja Mσ .
σy
σP
σx
P
S
dSP
σq
σl
y
x
A
α
Slika 5.10 Grafični prikaz pogreškov pri polarni metodi Iz tega se lahko potem izpeljejo naslednja standardna odstopanja:
a. izračun standardnega odstopanja navezovalne smeri ASν
σ
22
22
2
22
2
22
2
22
SASAAS
ySA
ySA
xSA
xSA d
xd
xd
yd
y σσσσσν
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ Δ+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ Δ−+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ Δ−+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ Δ= (5.70)
kjer je
AS xxx −=Δ (5.71)

Natančnost posameznih metod zakoličevanja
35
AS yyy −=Δ
22 yxdSA Δ+Δ= (5.72)
Nekaj primerov za standardno odstopanje navezovalne smeri A
Sνσ :
SAd ==
SA xx σσ
mmSA yy 10== σσ
==SA xx σσ
mmSA yy 25== σσ
==SA xx σσ
mmSA yy 50== σσ
10 m 90,0 mgon 225,0 mgon 450 mgon 50 m 18,0 mgon 45,0 mgon 90,0 mgon
100 m 9,0 mgon 22,5 mgon 45,0 mgon 500 m 1,8 mgon 4,5 mgon 9,0 mgon 1000 m 0,9 mgon 2,5 mgon 4,5 mgon
Tabela 5.5
Iz tega se lahko zaključi, da je za navezovalne točke najbolje uporabiti čim bolj oddaljene točke.
b. standardno odstopanje zakoličene smeri ασ
( ) 222 2 rB
Aσσσ
να ⋅+= (5.73)
c. standardno odstopanje zakoličenih koordinat
ixσ , iyσ oziroma standardno odstopanje
položaja (2D) Piσ
( ) 22222222 sin)(cos ZxiSid
iSxx s
Aiσσνσνσσ α +⋅−+⋅+= (5.74)
( ) 22222222 sin)(cos ZyiSid
iSyy s
Aiσσνσνσσ α +⋅−+⋅+= (5.75)
222yixiPi σσσ += (5.76)
Pogrešek merjenja razdalje vpliva pri tem na smer zakoličene smeri točke kot vzdolžni pogrešek in pogrešek merjenja smeri kot prečni pogrešek. Če se koordinatni sistem orientira z 'x osjo v smeri zakoličene točke, se tako pridobi standardna odstopanja v vzdolžni in prečni smeri
ilσ ,
iqσ :
2
'22
'2'
2Zxdxxl Aii
σσσσσ ++== (5.77) 2
'222
'2'
2Zyiyyq d
Aiiσσσσσ α +⋅+== (5.78)
222'
2'
2iiii qlyxPi σσσσσ +=+= (5.79)

Natančnost posameznih metod zakoličevanja
36
stojiščed
zakoličena točka
zakoličbena točka
σα σQσd
σLr
oddaljen cilj
Slika 5.11: Učinek pogreška kota in razdalje pri polarnem zakoličenju Nezanesljivosti koordinat stojišča, kot tudi centriranje, se tukaj nanašajo na privzeto novo orientacijo koordinatnega sistema. Iz obeh standardnih odstopanj v vzdolžni in v prečni smeri se lahko izračuna (2D) natančnosti položaja Piσ . Ta položajna natančnost se poda z uporabo posameznih standardnih
odstopanj:
222'
2'
2iiii qlyxPi σσσσσ +=+=
2'
2'
222'
22'
2'
2' MyZyiydMxZxx d
AAσσσσσσσσ α ++⋅+++++= (5.80)
222222MZPid A
d σσσσσ α +++⋅+=
dσ standardno odstopanje merjenja razdalje
ασ standardno odstopanje merjenja kota s 222 2 rBA
σσσνα ⋅+=
SPσ 2D standardno odstopanje stojišča
Zσ standardno odstopanje centriranja nad fiksno točko
Mσ standardno odstopanje označevanja točke S 1cossin 22 =+ αα in sprejemom, da sta stojišče S ter navezovalna točka A brez pogreškov, ( 0====
SSAA yxyx σσσσ ) potem je položajna natančnost točke P :
22
2
222 2MZ
rdyPxPP
d σσρ
σσσσσ ++⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅+=+= , (5.81)
gongon 662,632
400==
πρ (5.82)
Tako bodo upoštevana samo slučajna odstopanja postopka – zakoličevanja z razdaljo in kotom. Zaradi tega je potrebno natančnosti centriranja in označevanja zakoličbenih točk dodati k zasnovi. Za razstavitev na komponente odstopanj merskih elementov dolžine in kota se lahko poda v navezovanju na fiksno točko kot vzdolžno in prečno odstopanje:
22qlP σσσ += (5.83)

Natančnost posameznih metod zakoličevanja
37
2
222 ZMdl
σσσσ ++= (5.84)
22 222
ZMrq
d σσρ
σσ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⋅⋅= (5.85)
Pri tem vpliv odstopanj centriranja in označevanja znaša 2/σ predpostavljenega vpliva vzdolžne in prečne smeri. Natančnost merjenja razdalj vpliva neposredno na položajno natančnost. medtem ko vpliv natančnosti meritev kotov pada sorazmerno z razdaljo (tabela 5.6). Primer za vpliv natančnosti merjenja kotov rσ :
razdalja d Qσ za 10=rσ mgon Qσ za 1=rσ mgon 10 m 1,6 mm 0,16 mm 50 m 7,8 mm 0,78 mm
100 m 15,7 mm 1,57 mm 200 m 31,4 mm 3,14 mm
Tabela 5.6
Pri zakoličenju tras in še posebej tirnic so zahteve natančnosti prečno k osi trase večje kot v smeri trase, pri čemer je odločilna relativna položajna natančnost (sosedska natančnost), na primer pri vzdrževanju razdalje med tračnicama. Če zakoličujemo iz poligonskega vlaka v bližini trase z metodo proste izbire stojišča iz enega stojišča v sredini trase, je natančnost zakoličevanja v prečni smeri odvisna samo od natančnosti merjenja kota in v vzdolžni smeri samo od natančnosti merjenja razdalje (če se vzame pogrešek centriranja in pogrešek koordinat stojišča kot zanemarljive). Primer: Kot navezno točko za položajno natančnost točk zakoličevanja bo stojišče A (na primer središčna točka na temelju) predpostavljeno kot prosto pogreškov. Odgovarjajoče zahtevam natančnosti 3=Pσ mm in izbiri instrumentarija bo privzeto naslednje:
− elektronski tahimeter srednje natančnosti: 2=dσ mm in 0,1=rσ mgon
− označevanje: 5,0=Mσ mm
− centriranje: 5,0=zσ mm
− srednja oddaljenost zakoličevanja: 40=d m S temi izhodiščnimi vrednostmi se izkažejo:
1,22
5,05,0222
2 =+
+=lσ mm (5.86)

Natančnost posameznih metod zakoličevanja
38
1,12
5,05,063662
20,140000 222
=+
+⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅=qσ mm (5.87)
4,21,11,2 22 =+=Pσ mm (5.88)
Na tem primeru je dokazano, da je mogoče pri ustrezni skrbnosti vzdrževati zahtevano natančnost, pri čemer natančnost meritev razdalj določa položajno natančnost točk. V gradbeništvu se natančnost koordinat točk večinoma podaja kot vzdolžno in prečno odstopanje in na osnovi tega geodet predvidi primeren postopek oziroma natančnost metode.

Natančnost posameznih metod zakoličevanja
39
5.2.3 NATANČNOST ZAKOLIČEVANJA PO METODI PRESEKA SMERI Na natančnost pri zakoličenju s pomočjo preseka smeri vplivajo naslednji izvori pogreškov:
− standardni odklon kooordinat obeh stojišč BBAA yxyx σσσσ ,,, ,
− standardni odklon merjenja smeri na obeh stojiščih rσ ,
− standardni odklon centriranja nad obema stojiščema Zσ ,
− standardni odklon označevanja zakoličbene točke Mσ . V oceni natančnosti, ki sledi v nadaljevanju, so upoštevani pogreški merjenja smeri in pogreški centriranja instrumenta na obeh stojiščih ter pogrešek označevanja zakoličbene točke.
α β
γ
A B
x
y
a bσα
σP
σβ
zakoličena točka
zakoličbena točka
Slika 5.12: Učinek pogreškov kotov pripreseku smeri Kota α in β izhajata iz dveh meritev smeri. Za njuni standardni odstopanji velja, da ta enaki, saj so smeri merjene z enako natančnostjo.
2222 2 Wr σσσσ βα =⋅== (5.89)
Natančnost zakoličevanja je odvisna od natančnosti merjenja zakoličbenih kotov iα in iβ iz stojišč
A in B , pri tem je predpostavljeno, da sta stojišči prosti pogreškov in s tem tudi zakoličbena baza
AB . Ob predpostavki, da je 2rW σσσσ βα === se natančnost zunanjega ureza poda:
( )αββα
σσ α 442
22 sinsin
)(sin+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⋅= AB
xd
(5.90)
⎟⎠⎞
⎜⎝⎛ +⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⋅= αβ
βασσ α 2sin
412sin
41
)(sin22
2
22 ABy
d (5.91)
Natančnost posameznih metod zakoličevanja
40
222yxP σσσ += (5.92)
Lahko se tudi zapiše:
( ) ( )ρ
σγρ
σσγ
σ β222
2
2222
22
sin1
sin1 baba Wa
P+
⋅=⋅+⋅
⋅= (5.93)
Zraven natančnosti merjenja smeri je še potrebno upoštevati centriranje nad stojiščnimi točkami in označevanje zakoličenih točk:
( ) 22442
22
21sinsin
)(sin MZAB
xd σσαβ
βασσ α +++⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⋅= (5.94)
22222
22
212sin
412sin
41
)(sin MZAB
yd σσαβ
βασσ α ++⎟
⎠⎞
⎜⎝⎛ +⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⋅= (5.95)
( ) 222
222
2sin
2Mz
rP
ba σσγρ
σσ +++
⋅⎟⎟⎠
⎞⎜⎜⎝
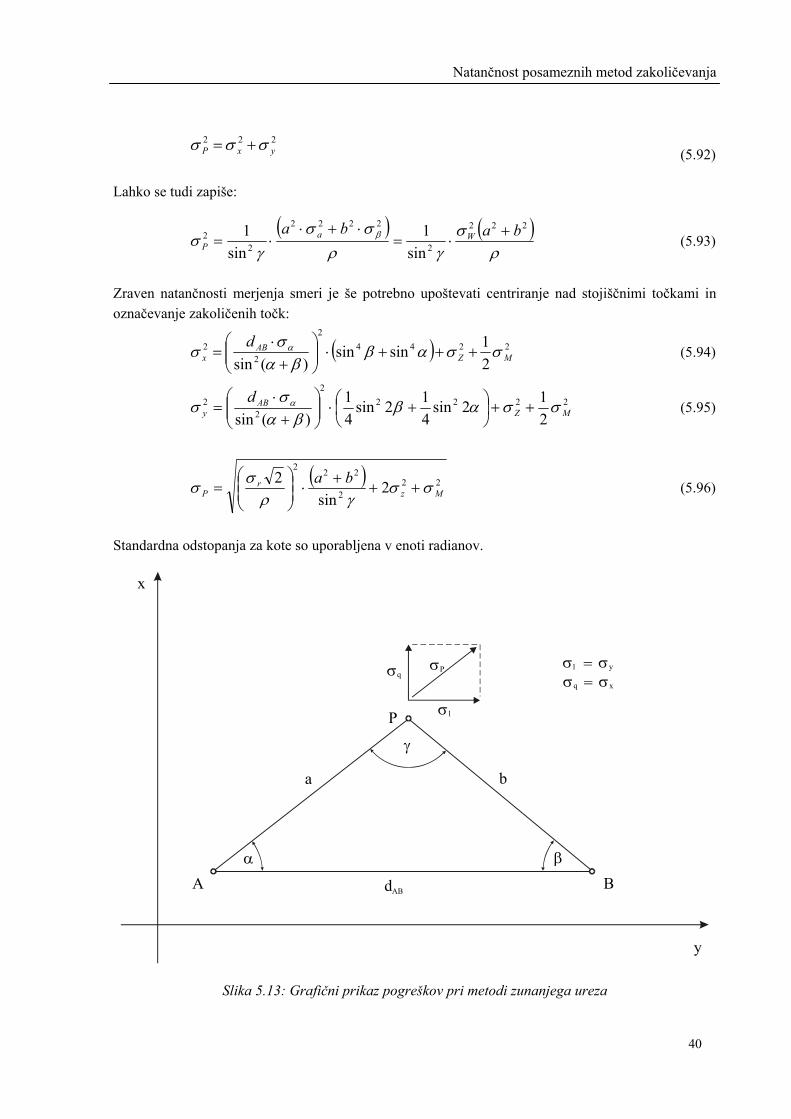
⎛= (5.96)
Standardna odstopanja za kote so uporabljena v enoti radianov.
A B
σqσP
σlP
α
γ
β
dAB
a b
y
x
σq σx=σl σy=
Slika 5.13: Grafični prikaz pogreškov pri metodi zunanjega ureza

Natančnost posameznih metod zakoličevanja
41
Primer za 10=== βα σσσ W mgon:
ba = 10=γ gon 50=γ gon 100=γ gon 150=γ gon 170=γ gon
10 m =ABd 1,57 m =Pσ 5,6 mm
=ABd 7,65 m =Pσ 2,6 mm
=ABd 14,14 m =Pσ 2,2 mm
=ABd 18,48 m =Pσ 2,6 mm
=ABd 19,45 m =Pσ 3,3 mm
50 m =ABd 7,85 m
=Pσ 28,1 mm =ABd 38,27 m =Pσ 13,2 mm
=ABd 70,71 m =Pσ 11,1 mm
=ABd 92,39 m =Pσ 13,2 mm
=ABd 97,2 m =Pσ 16,5 mm
100 m =ABd 15,7 m
=Pσ 56,2 mm =ABd 76,5 m
=Pσ 26,4 mm =ABd 141,4 m =Pσ 22,2 mm
=ABd 184,8 m =Pσ 26,4 mm
=ABd 194,5 m =Pσ 33,0 mm
200 m =ABd 31,4 m
=Pσ 112,3mm =ABd 153,1 m =Pσ 52,8 mm
=ABd 282,8 m =Pσ 44,4 mm
=ABd 369,6 m =Pσ 52,8 mm
=ABd 389,0 m =Pσ 65,9 mm
Tabela 5.7: Natančnost zakoličevanja
Graf 5.1: Natančnost zakoličevanja (podatki tabela 5.7)
Natančnost zakoličevanja v odvisnosti od dolžine stranic (a=b) in kota γ
0
20
40
60
80
100
120
10 50 100 200
razdalja[m]
P
[mm
]
10 gon 50 gon 100 gon 150 gon 170 gon

Natančnost posameznih metod zakoličevanja
42
Primer za 5=== βα σσσ W mgon:
ba = 10=γ gon 50=γ gon 100=γ gon 150=γ gon 170=γ gon
10 m =ABd 1,57 m =Pσ 2,8 mm
=ABd 7,65 m =Pσ 1,3 mm
=ABd 14,14 m =Pσ 1,1 mm
=ABd 18,48 m =Pσ 1,3 mm
=ABd 19,45 m =Pσ 1,6 mm
50 m =ABd 7,85 m
=Pσ 14,0 mm =ABd 38,27 m =Pσ 6,6 mm
=ABd 70,71 m =Pσ 5,6 mm
=ABd 92,39 m =Pσ 6,6 mm
=ABd 97,2 m =Pσ 8,2 mm
100 m =ABd 15,7 m
=Pσ 28,1 mm =ABd 76,5 m
=Pσ 13,2 mm =ABd 141,4 m =Pσ 11,1 mm
=ABd 184,8 m =Pσ 13,2 mm
=ABd 194,5 m =Pσ 16,5 mm
200 m =ABd 31,4 m
=Pσ 56,2 mm =ABd 153,1 m =Pσ 26,4 mm
=ABd 282,8 m =Pσ 22,2 mm
=ABd 369,6 m =Pσ 26,4 mm
=ABd 389,0 m =Pσ 33,0 mm
Tabela 5.8 Natančnost zakoličevanja
Graf 5.2: Natančnost zakoličevanja (podatki tabela 5.8)
Natančnost zakoličevanja v odvisnosti od dolžine stranic (a=b) in kota γ
0
10
20
30
40
50
60
10 50 100 200
razdalja[m]
P
[mm
]
10 gon 50 gon 100 gon 150 gon 170 gon

Natančnost posameznih metod zakoličevanja
43
Primer za 1=== βα σσσ W mgon:
ba = 10=γ gon 50=γ gon 100=γ gon 150=γ gon 170=γ gon
10 m =ABd 1,57 m =Pσ 0,6mm
=ABd 7,65 m =Pσ 0,3 mm
=ABd 14,14 m =Pσ 0,2 mm
=ABd 18,48 m =Pσ 0,3 mm
=ABd 19,45 m =Pσ 0,3 mm
50 m =ABd 7,85 m =Pσ 2,8 mm
=ABd 38,27 m =Pσ 1,3 mm
=ABd 70,71 m =Pσ 1,1 mm
=ABd 92,39 m =Pσ 1,3 mm
=ABd 97,2 m =Pσ 1,6 mm
100 m =ABd 15,7 m =Pσ 5,6 mm
=ABd 76,5 m =Pσ 2,6 mm
=ABd 141,4 m =Pσ 2,2 mm
=ABd 184,8 m =Pσ 2,6 mm
=ABd 194,5 m =Pσ 3,3 mm
200 m =ABd 31,4 m
=Pσ 11,2 mm =ABd 153,1 m =Pσ 5,3 mm
=ABd 282,8 m =Pσ 4,4 mm
=ABd 369,6 m =Pσ 5,3 mm
=ABd 389,0 m =Pσ 6,6 mm
Tabela 5.9 Natančnost zakoličevanja
Graf 5.3: Natančnost zakoličevanja (podatki tabela 5.9)
Natančnost zakoličevanja v odvisnosti od dolžine stranic (a=b) in kota γ
0
20
40
60
80
100
120
10 50 100 200
razdalja[m]
P
[mm
]
10 gon 50 gon 100 gon 150 gon 170 gon

Natančnost posameznih metod zakoličevanja
44
Natančnost zakoličevanja bo tako slabša, čim večja bo oddaljenost zakoličbenih točk od navezovalnih točk in toliko boljša, kadar bo presek smeri postal oster. Vrednosti v tabelah (5.7, 5.8, 5.9) kažejo, da je ugodna razporeditev za zakoličevanje v primeru, ko tvori kot γ na zakoličbeni točki pravi kot (100 gon) in naj bi ob uporabi bil omejen na 30 gon < γ < 170 gon; temu primerno je potrebno izbrati stojišča. V tem primeru se za 100 metrov oddaljeno zakoličbeno točko od stojišča s standardnim odstopanjem določitve kota 1 mgon poda 2-D položajna natančnost 2,2 mm. Položajna natančnost zakoličene točke je ustrezna prejšnji enačbi preseka kotov smeri in odvisnosti njihove oddaljenosti do fiksnih točk. Natančnost zakoličevanja bo tako slabša, čim večja bo oddaljenost zakoličbenih točk od navezovalnih točk in toliko boljša, kadar bo presek smeri postal oster. Zunanji urez bo v inženirskih meritvah uporabljen za izmero točk tam, kjer ni mogoče označevanje cilja (z reflektorjem), na primer posnetki fasade ali pri gradbenih kontrolnih meritvah. Poleg tega je zunanji urez bistvena metoda za orientiranje industrijskih merskih sistemov in za precizne meritve v bližini, še posebej pri gradnji naprav in strojev.
5.2.4 NATANČNOST ZAKOLIČEVANJA PO METODI LOČNEGA PRESEKA Natančnost zakoličevanja s pomočjo ločnega preseka je odvisna od standardnega odstopanja izmerjenih razdalj in od razporeditve meritev v trikotniku iABP oziroma lege obeh stojišč in
zakoličbene točke. Položajna natančnost točk je določena s kotom γ, pod katerim se sekajo razdalje.
222
2
4
222
21
sinsin
MZABx d σσρσ
γασ α ++⋅⋅= (5.97)
222
2
4
222
21
sinsin
MZABy d σσρσ
γβσ β ++⋅⋅= (5.98)
Natančnost zakoličevanja za točko se potem zapiše:
222yxP σσσ += (5.99)
222
2
4
22
2
2
4
222 2
sinsin
sinsin
MZABABP dd σσρσ
γβ
ρσ
γασ βα +⋅+⋅⋅+⋅⋅= (5.100)
V formuli se lahko predpostavi, da je:
AB
A
dd
=γβ
sinsin
in AB
B
dd
=γα
sinsin
(5.101)
Z zadostno identičnostjo se lahko prav tako predpostavi

Natančnost posameznih metod zakoličevanja
45
A
d
dB
σρ
σ α = in B
d
dA
σρ
σ β = (5.102)
in potem sledi
222
222 2
sin MZdd
PBA σσ
γσσ
σ +⋅++
= (5.103)
in pri
BA ddd σσσ == bo
222
22 2
sin2
MZd
P σσγ
σσ +⋅+⋅
= (5.104)
pri čemer znaša najbolj ugoden kot preseka 100 gon.
ba = 10=γ gon 50=γ gon 100=γ gon 150=γ gon 170=γ gon
10 m =ABd 1,57 m
=Pσ 35,8 mm =ABd 7,65 m
=Pσ 16,8 mm =ABd 14,14 m =Pσ 14,1 mm
=ABd 18,48 m =Pσ 16,8 mm
=ABd 19,45 m =Pσ 21,0 mm
50 m =ABd 7,85 m
=Pσ 35,8 mm =ABd 38,27 m =Pσ 16,8 mm
=ABd 70,71 m =Pσ 14,1 mm
=ABd 92,39 m =Pσ 16,8 mm
=ABd 97,2 m =Pσ 21,0 mm
100 m =ABd 15,7 m
=Pσ 35,8 mm =ABd 76,5 m
=Pσ 16,8 mm =ABd 141,4 m =Pσ 14,1 mm
=ABd 184,8 m =Pσ 16,8 mm
=ABd 194,5 m =Pσ 21,0 mm
200 m =ABd 31,4 m
=Pσ 35,8 mm =ABd 153,1 m =Pσ 16,8 mm
=ABd 282,8 m =Pσ 14,1 mm
=ABd 369,6 m =Pσ 16,8 mm
=ABd 389,0 m =Pσ 21,0 mm
Tabela 5.10: Natančnost zakoličevanja
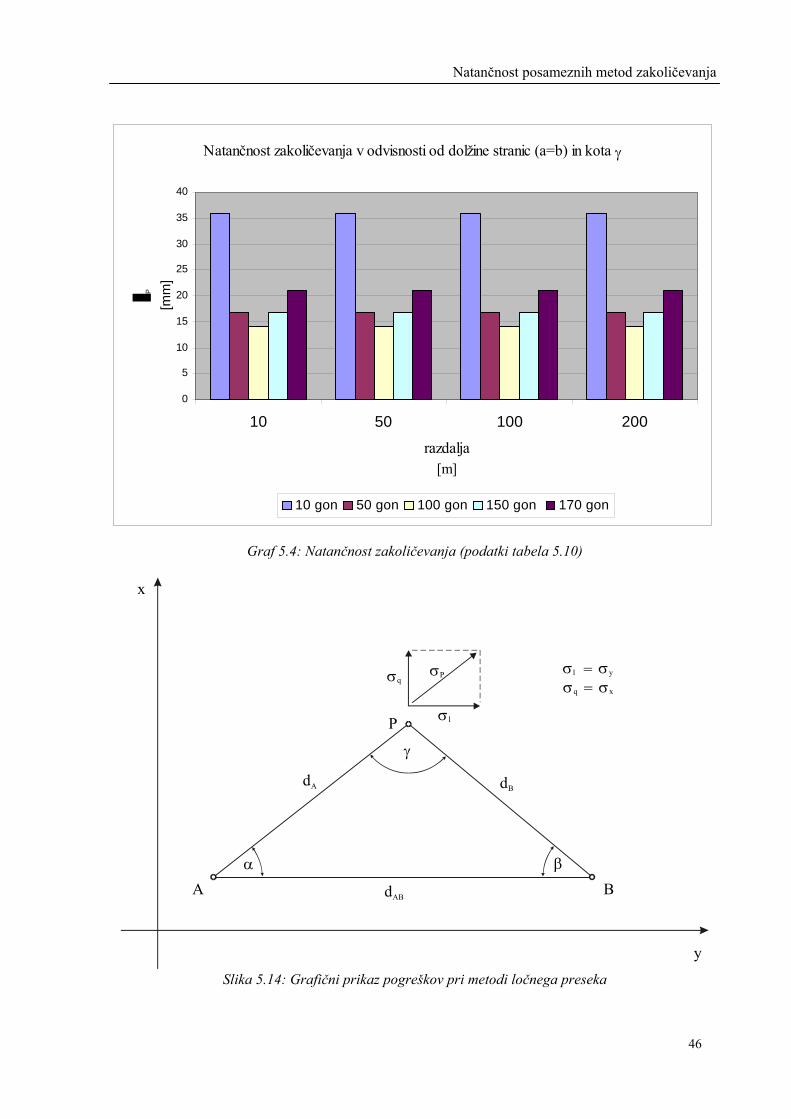
Natančnost posameznih metod zakoličevanja
46
Graf 5.4: Natančnost zakoličevanja (podatki tabela 5.10)
A B
σqσP
σlP
α
γ
β
y
x
σq σx=σl σy=
dA dB
dAB
Slika 5.14: Grafični prikaz pogreškov pri metodi ločnega preseka
Natančnost zakoličevanja v odvisnosti od dolžine stranic (a=b) in kota γ
0
5
10
15
20
25
30
35
40
10 50 100 200
razdalja[m]
P
[mm
]
10 gon 50 gon 100 gon 150 gon 170 gon
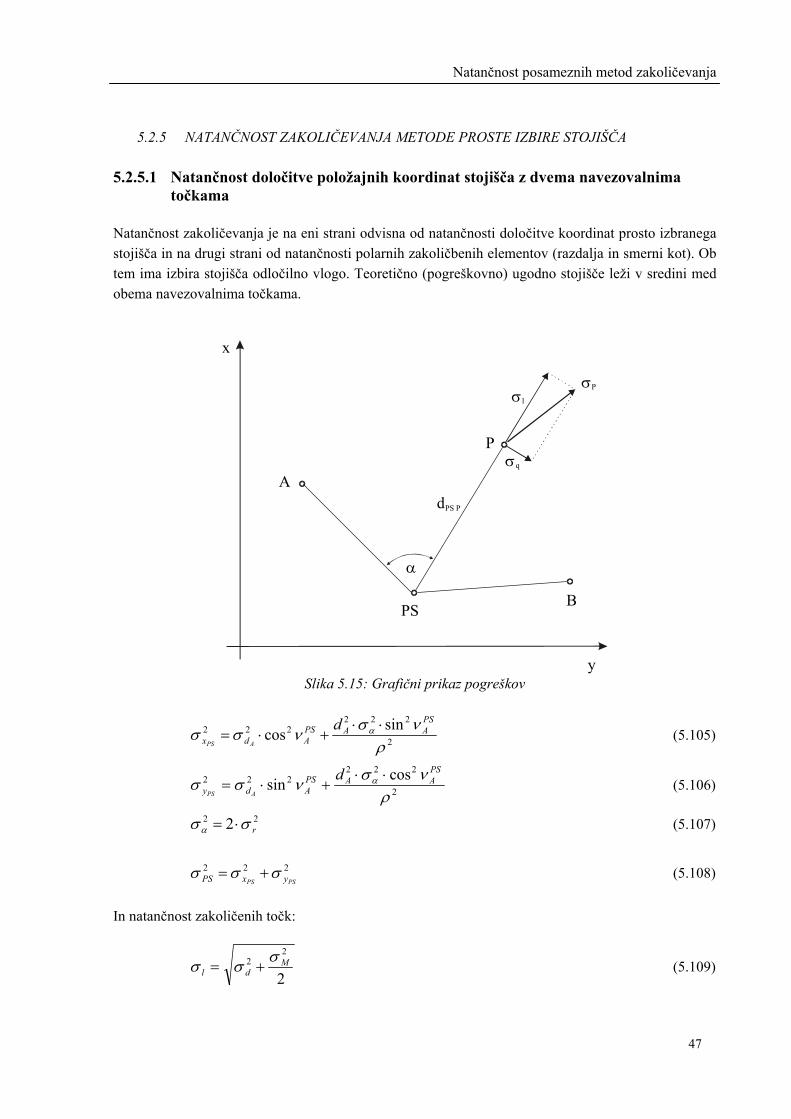
Natančnost posameznih metod zakoličevanja
47
5.2.5 NATANČNOST ZAKOLIČEVANJA METODE PROSTE IZBIRE STOJIŠČA 5.2.5.1 Natančnost določitve položajnih koordinat stojišča z dvema navezovalnima
točkama Natančnost zakoličevanja je na eni strani odvisna od natančnosti določitve koordinat prosto izbranega stojišča in na drugi strani od natančnosti polarnih zakoličbenih elementov (razdalja in smerni kot). Ob tem ima izbira stojišča odločilno vlogo. Teoretično (pogreškovno) ugodno stojišče leži v sredini med obema navezovalnima točkama.
A
σP
P
PS
α
y
x
dPS P
σq
σl
B
Slika 5.15: Grafični prikaz pogreškov
2
222222 sincos
ρνσνσσ α
PSAAPS
Adxd
APS
⋅⋅+⋅= (5.105)
2
222222 cossin
ρνσνσσ α
PSAAPS
Adyd
APS
⋅⋅+⋅= (5.106)
22 2 rσσ α ⋅= (5.107)
222
PSPS yxPS σσσ += (5.108)
In natančnost zakoličenih točk:
2
22 Mdl
σσσ += (5.109)

Natančnost posameznih metod zakoličevanja
48
22 22
Mrq
d σρ
σσ +⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅= (5.110)
2222PSPS yxqlP σσσσσ +++= (5.111)
5.2.5.2 Natančnost določitve položajnih koordinat stojišča s Helmertovo transformacijo Natančnost zakoličevanja je tudi tukaj odvisna od lege stojišča in lege zakoličbenih točk. Splošno velja tudi tukaj, da naj leži stojišče in zakoličbene točke znotraj območja navezovalnih točk.
PS
N
R=2
R=1
Z
Slika 5.16 Pri kratkih razdaljah je lahko vpliv pogreška elektronskega tahimetra, odvisnega od razdalje zanemarljiv. Splošno velja za določanje uteži merskim vrednostim:
2
20
iip
σσ
= (5.112)
ip utež opazovanja ali merske veličine 2iσ varianca istega opazovanja 20σ poljubno izbrana brezdimenzionalna konstanta
Potem velja za uteži smeri in dolžin:
2
20
ririp
σσ
= in 2
20
disip
σσ
= (5.113)
Če izberemo za 10 == constσ , sledijo uteži za smeri in razdalje.
2
1
ririp
σ= in 2
1
disip
σ= . (5.114)

Natančnost posameznih metod zakoličevanja
49
S temi predpostavkami se izkažejo za določitev prostega stojišča s pomočjo Helmertove transformacije naslednja spoznanja:
− minimalni položajni standardni odklon PSσ nastopa v težišču fiksnih točk,
− natančnost polarnih točk Pσ je neodvisna od lege stojišča instrumenta. Z naraščajočo razdaljo polarnih točk od težišča fiksnih točk, se povečuje položajni standardni odklon,
− znotraj kroga s polmerom 1=R je natančnost (4 transformacijske točke, za 0σ glej enačbo
5.55):
07,0 σσ ⋅=PS 02,1 σσ ⋅=P (5.115)
− do radialne oddaljenosti 2=R (povprečna razdalja fiksnih točk od težišča Z) je poslabšanje
položajne natančnosti še sprejemljivo, − po možnosti polarne točke naj ne bi prestopile radialno oddaljenost 2=R (slika 5.16), − rast natančnosti je neznatna z uporabo petih ali več fiksnih točk za določanje prostega stojišča.
Te trditve vodijo do zaključkov, da bi izbira navezovalnih točk za prosto izbiro stojišča upoštevala naslednje kriterije:
− merjeni oz. zakoličevan objekt naj leži znotraj kroga, ki ga tvorijo fiksne točke, − če je le mogoče, da se merjeni objekt nahaja čim bližje težišču navezovalnih točk.
Natančnost zakoličenih točk je podana z enakimi enačbami (5.105 - 5.111) kot za primer metode prostega stojišča z dvema navezovalnima točkama. 5.2.5.3 Natančnost določitve položajnih koordinat stojišča z izravnavo Standardna odstopanja koordinat stojišča so na eni strani odvisna od položaja stojišča glede na navezovalne točke in na drugi strani od standardnih odstopanj izmerjenih razdalj in smeri. Prav tako kot pri prej opisani metodi s Helmertovo transformacijo velja tudi tukaj, da je ugodno stojišče v težišču, ki se nanaša na navezovalne točke. Rrezultat izravnane da koordinate stojišča PSx , PSy v sistemu navezovalnih koordinat in njihove
celotne variančno kovariančne matrike:
⎥⎦
⎤⎢⎣
⎡=
yyyx
xyxxxx qq
qqQ (5.116)

Natančnost posameznih metod zakoličevanja
50
Standardni odklon utežne enote se izračuna sledeče:
unvPvT
−⋅⋅
=0σ (5.117)
Kjer je
v vektor popravkov P matrika uteži opazovanj n število opazovanj u število neznank
un − je število nadštevilnih opazovanj (število izmerjenih smeri do fiksnih točk in izmerjene razdalje
minus 4 neznanke). Z upoštevanjem teh standardnih odstopanj je mogoče izračunati standardna odstopanja za koordinate stojišča:
xxx q⋅= 0σσ (5.118)
yyy q⋅= 0σσ (5.119)
Natančnost položaja stojišča določena s prosto izbiro stojišča da empirični standardni odklon.
yyxxP qq +⋅= 0σσ ali (5.120)
22yxP σσσ += (5.121)
Popravke se lahko uporabi v primeru, da so standardna odstopanja prevelika, za iskanje grobih pogreškov v opazovanjih oziroma v koordinatah navezovalnih točk. Medtem ko se s standardnim odklonom 0σ opisuje natančnost meritev elektronskega tahimetra in
natančnost navezovalnih točk, so utežni koeficienti xxq in yyq odvisni samo od lege navezovalnih
točk glede na stojišče (razdelitev navezovalnih točk po horizontu) in nastavitve uteži. Grafična predstavitev natančnosti prostega stojišča je podana s srednjimi elipsami pogreškov. Natančnost zakoličenih točk je podana z enakimi enačbami (5.105 - 5.111) kot za primer metode prostega stojišča z dvema navezovalnima točkama in s Helmertovo transformacijo. Natančnost zakoličevanja točk med polarno metodo in metodami proste izbire stojišča se, kot je razvidno iz enačb, razlikuje za natančnost določitve prostega stojišča ter odstopanja zaradi centriranja instrumenta.

Natančnost posameznih metod zakoličevanja
51
Pri načrtovanju, izvedbi in kontroli del zakoličevanja, je potrebno prenesti projektirane geometrične veličine v naravo z ustrezno (zahtevano) natančnostjo. Da se zadovolji zahtevano še dovoljeno odstopanje pri zakoličevanju, je potrebno pred izvedbo zakoličevanja izbrati najprimernejšo metodo ter metodi in nalogi ustrezen instrumentarij. Prav tako je potrebno pred izbiro metode zakoličevanja upoštevati omejitve, ki jih te postavljajo, da je mogoče doseči optimalno natančnost zakoličevanja z izbrano metodo. Vendar natančnost zakoličenih točk ni odvisna od same metode, ampak tudi od uporabljenega instrumentarija. Prav tak rezultat pripomore pri lažjem odločanju oziroma izbiri ustrezne metode in instrumentarija za določene naloge in zahteve. Metoda proste izbire stojišča s Helmertovo transformacijo in metoda proste izbire stojišča z izravnavo se izkažeta z oceno natančnosti določitve prostega stojišča predvsem zaradi nadštevilnih opazovanj. Metoda proste izbire stojišča z dvema navezovalnima točkama je mnogo bolj nezanesljiva pri določitvi položaja prostega stojišča kot metoda s Helmertovo transformacijo oziroma z izravnavo, to se opazi predvsem z instrumentom nižje natančnosti. Z uporabo instrumenta višje natančnosti se ocena natančnosti nekoliko približa natančnosti doseženi s Helmertovo transformacijo oziroma z izravnavo. Z uporabo natančnejšega elektronskega tahimetra se pri vseh metodah ocena vrednost natančnosti zmanjša na približno 1/3 vrednosti, ki je dosežena s tahimetrom nižje natančnosti. Prav pri metodi preseka smeri se ocena natančnosti zakoličevanja bistveno spremeni zaradi natančnejšega določanja smeri, ki odločilno vpliva na natančnost pri tej metodi. Ocena natančnosti zakoličevanja z metodo preseka smeri lahko poda odlične rezultate, v primeru pravilne izbire oblike trikotnika, ki ga tvorijo navezovalne točke in zakoličbena točka. Najbolj optimalna metoda zakoličevanja po rezultatih je vsekakor polarna metoda. Za edino pomanjkljivost metode bi se lahko štelo pomanjkanje ustreznih točk na delovišču, iz katerih bi potekalo zakoličevanje. Tukaj pokažeta svojo prednost metodi proste izbire stojišča s Helmertovo transformacijo ter z izravnavo, saj sta po natančnosti zakoličevanja tesno za polarno metodo, pa čeprav doda k oceni natančnosti zakoličevanja svoj delež tudi ocena določitve stojišča, ki je določena iz meritev. Prav zaradi poljubne izbire stojišča je metoda zelo uporabna, saj si stojišče omislimo tam, kjer je potrebno in ne tam, kjer je mogoče. Metodi ločnega preseka in preseka smeri se lahko šteje v slabo potreba po hkratni uporabi dveh instrumentov in s tem dveh operaterjev. Seveda pa na izbiro metode zakoličevanja vplivajo tudi ekonomski dejavniki. Sem spadajo, na primer število operaterjev, ki so potrebni za izvedbo zakoličevanja, čas v katerem je mogoče izvesti nalogo ter nenazadnje tudi programski moduli, ki so vgrajeni v instrument. Tako so v veliki prednosti z novejšimi instrumenti polarna metoda in metode proste izbire stojišča. Prav razvoj sodobnih elektronskih tahimetrov je omogočil uporabo metode proste izbire stojišča, saj omogoča izračun koordinat stojišča ter prav tako določitev zakoličbenih elementov glede na izračunano stojišče s pomočjo koordinat točk, ki se vnesejo v spomin pred zakoličevanjem. Nekateri sodobni instrumenti omogočajo tudi delo samo z operaterjem, ki opravlja hkrati delo figuranta in delo operaterja. Zaenkrat je taka oprema zelo draga, da bi se podjetja pogosteje odločala zanjo.

Natančnost posameznih metod zakoličevanja
52
6. RAČUNANJE VOLUMNOV ZEMELJSKIH MAS Postavitev gradbenega telesa v prostor je v vsakem primeru povezana z bolj ali manj obsežnimi zemeljskimi deli. Gradbeni stroški v okviru zemeljskih del pa imajo precejšen vpliv na stroške izgradnje novega objekta. V okviru projektiranja zato tečejo prizadevanja za optimizacijo gradbenih stroškov in izdelavo različnih variant izvedbe projekta. Pri tem je potrebno določiti količino zemeljskih mas, ki jih je potrebno premestiti. S stališča geodezije imamo pri zemeljskih delih opraviti s spremembo naravnega reliefa zemljišča v umetni relief. Pri izračunu volumna aproksimiramo zemeljske mase z geometrijskim telesom, katerega volumen lahko izračunamo. Način izračuna volumnov zemeljskih mas je odvisen od naslednjih paramerov:
- velikosti in vrste objekta, - reliefa terena, - načina projektiranja, - zahtev po natančnosti.
V odvisnosti od oblike gradbenega telesa, za katerega je potrebno določiti velikost zemeljskih mas so razvite različne metode izračuna. Vse metode, ki so opisane v nadaljevanju predvidevajo uporabo različne računalniške opreme, ki omogoča hitrejši izračun. 6.1 Izračun volumnov pri linijskih objektih Pri gradnji linijskih objektov, predvsem cest in železnic, predstavlja obseg zemeljskih del precejšno finančno postavko v celotnem projektu. Neposredno z zemeljskimi deli je povezan izračun volumna zemeljskih mas, ki jih je potrebno premestiti. Ta so pri hribovitem terenu še posebno obsežna in imajo velik vpliv na končni izračun stroškov izvedbe projekta. Obseg zemeljskih del je tudi eden izmed kriterijev za izbiro med različnimi variantami poteka trase pri linijskih objektih. Zato morajo biti opravljena strokovno in z ustrezno natančnostjo. Običajno računamo volumne zemeljskih mas pri linijskih objektih na osnovi površine prečnih profilov projekta prometnice in razdalje med profili. Pri tem kot osnovno telo smatramo prizmatoid (Sl.6.1), volumen pa dobimo s Simpsonovo enačbo:
( )1isrii PP4P6
V +++=d
(6.1 )
Pri čemer je: d … razdalja med začetnim in končnim profilom Pi… površina začetnega profila Pi+1… površina končnega profila Psr… površina srednjega profila Pri tem ločimo deleže površine posameznega profila, ki ležijo v nasipu in v useku.

Natančnost posameznih metod zakoličevanja
53
Pi + 1
Psr
Pid
Slika 6.1. V kolikor Psr ne poznamo, ga izračunamo po enačbi:
2
1
2 ⎟⎟⎠
⎞⎜⎜⎝
⎛ += +ii
sr
PPP ( 6.2 )
Pri praktičnem računanju pa se za približne izračune volumnov uporablja tudi enačba:
( )1iii PP2
V ++≅d
( 6.3)
Enačba ( 6.3) je približna enačba in predpostavlja, da je povezava med posameznimi točkami dveh sosednjih profilov linearna in vzporedna. To pa v splošnem ne velja. Natančnost te enačba je odvisna od razlike površine dveh sosednjih profilov in dolžine profila. Večja je razlika med dvema sosednjima profiloma, manjša je natančnost volumna izračunanega po enačbi ( 6.3 ). Pogrešek je sistematične narave, saj je volumen računan po zgornjih enačbah vedno večji od dejanskega. Skupni volumen zemeljskih del na trasi dobimo s seštevanjem volumnov med posameznimi profili.
∑=n
iVV1
( 6.4)
6.1.1 IZRAČUN POVRŠINE PREČNIH PROFILOV Iz enačb ( 6.1 – 6.4 ) je razvidno, da je potrebno za izračun volumna poznati površino posameznega prečnega profila, oziroma delež useka in nasipa v profilu. Prečni profil je omejen na eni strani z obstoječim terenom na drugi strani pa s projektiranim oziroma novozgrajenim stanjem. V odvisnosti od obsega zemeljskih del in glede na razpoložljivo mersko tehniko in tehniko za izvrednotenje lahko dobimo podatke za izračun površine profila: 1) direktno iz geodetskih merjenj terena 2) s fotogrametričnim izvrednotenjem terena 3) na osnovi digitalnega modela reliefa 4) na osnovi obstoječih načrtov terena, ki morajo biti opremljeni z višinsko predstavo terena. Postopek izračuna površine useka ali nasipa v profilu je lahko: 1) mehanski s planimetrom na osnovi izrisanih prečnih profilov v ustreznem merilu 2) računski na osnovi lokalnih koordinat lomnih točk profila

Natančnost posameznih metod zakoličevanja
54
Izračuna površine iz koordinat je seveda natančnejši in glede na to da je običajno računalniško podprt je tudi ekonomičnejši.
6.2 Izračun volumna zemeljskih del pri ploskovnih objektih Pri ploskovni objektih, ki se razprostirajo na večji površini in kamor spadajo predvsem letališča, parkirišča, igrišča itd, računamo volumne na osnovi rasterske mreže. Kot je razvidno iz slike 6.2 je v tem primeru potrebno, da je na terenu označena rasterska mreža, ki jo horizontalni ravnini tvorijo pravilni kvadrati ali pravokotniki ( štev. 1 na sliki 6.2). V vsakem temenu mreže je potrebno določiti višino terena.
2
13Δ
h 1
Δh 1 Δ
h 1
Δh
2
Δh
2
Δh
2
Δh 3
Δh
3Δh 4
b
aa
aaa
H
H
B
G
H
Y
X
Slika 6.2. Gostoto rasterske mreže izbiramo tako,da nam obstoječe temenske točke rasterske mreže dobro reprezentirajo relief obstoječega terena hkrati pa je število merskih mest v normalnih mejah. Med projektirano ravnino in površino zemljišča se tako oblikujejo četverostrane prizme katerih volumen izračunamo po enačbi:
( )43214hhhhpVi Δ+Δ+Δ+Δ= ( 6.5 )
p … površina osnovne ploskve prizme ( p = a2 za kvadratno mrežo in p = ab za pravokotno mrežo) Δh1…Δh4 … višinske razlike med projektom in terenom v posameznih temenih rasterske mreže Skupni volumen zemeljske mase na celotni projektirani ravnini je vsota volumnov posameznih prizem.
∑=n
iVV1
( 6.6)

Natančnost posameznih metod zakoličevanja
55
Posebno pozornost je potrebno posvetiti robnim točkam projekta, kjer se lahko oblikujejo še drugi pravilni liki: klini ali piramide ( štev 2 in 3 na sliki 6.2), katerih volumne moramo izračunati po ustreznih enačbah.
6.2.1 IZRAČUN VOLUMNOV NA OSNOVI TAHIMETRIČNEGA POSNETKA TERENA Prosta izbira terenskih točk zagotavlja relativno natančno predstavo terena z minimalnim številom točk Točke izbiramo na mestih, kjer se teren v višinskem smislu lomi. Pri tej metodi je bistveno večje število računskih operacij, kar pa kompenziramo z uporabo elektronskega tahimetra, kontinuiranega prenosa podatkov in uporabo računalniške obdelave podatkov. V principu računamo volumne pri tej metodi podobno kot je opisano v primeru rastrske mreže. Celotni volumen razdelimo na tristrane prizme. Osnovno ploskev prizem predstavljejo trikotniki katerih ogljišča so posamezne tahimetrično posnete točke. Osnovno telo katerega volumen računamo nam predstavlja tristrana prizma. Razlika glede na prejšno metodo je v tem, da moramo površino osnovne ploskve prizme izračunati na osnovi položajnih koordinat tahimetrično posnetih točk.
( )3213hhh
pV t
i Δ+Δ+Δ= ( 6.7 )
pt… površina osnovne ploskve ( površina trikotnika) Δh1…Δh3 … višinske razlike med projektom in terenom v posameznih tahimetrično posnetih točkah Površino trikotnika dobimo z enačbo:
( ) ( ) ( )[ ]21313232121
t xyxyxyp xxx −+−+−= ( 6.8) x1..3 in y1..3 so položajne koordinate tahimetrično posnetih točk Tudi v tem primeru skupni volumen izračunamo s seštevanjem posameznih delnih volumnov.

Natančnost posameznih metod zakoličevanja
56
7 KONTROLNE MERITVE Kontrolne meritve, kot pomemben del, ki ga izvajamo v okviru geodezije v inženirstvu, čedalje bolj pridobivajo na pomenu. Dejstvo je, da imamo na voljo čedalje manj prostora za izgradnjo raznih objektov, kar pomeni, da posamezne objekte gradimo tudi na območjih, ki so do nedavnega veljala kot neprimerna za pozidavo. Osnovni nalogi kontrolnih meritev, ki jih izvajamo na posameznih objektih, sta: - določiti premike objekta v horizontalni ali vertikalni ravnini oziroma prostoru, - določiti spremembo geometrijske oblike objekta, ki je največkrat posledica premika objekta v
prostoru oziroma deformacij, ki se zgodiju na objektu. Največkrat kontrolne meritve izvajamo: 1.Na gradbenih objektih, kot so hidroelektrarne, zajezitve, premostitveni objekti (mostovi, viadukti), kjer je osnovni namen, da pravočasno odkrijemo anomalije na objektu, ki bi lahko povzročile večjo škodo oziroma predstavljajo nevarnost za okolico. Poleg tega na osnovi rezultatov kontrolnih meritev dobimo tudi podatke o lastnostih materialov in konstrukcijskih značilnostih posameznih objektov. Omenjena spoznanja lahko predvsem uporabimo pri projektiranju podobnih novih objektov, kot tudi za uspešno sanacijo starih objektov. 2.Na strojnih in industrijskih napravah, kot so žerjavi, turbine, posamezni stroji. Omenjene naprave lahko služijo svojemu namenu le v primeru, če so izpolnjeni posamezni geometrijski pogoji, ki so predpisani za nemoteno in pravilno delovanje posameznega stroja ali celotne proizvodne linije. 3.Za potrebe inženirske geologije in mehanike tal, kjer gre predvsem za lokalne in regionalne probleme v zvezi s premikanjem zemeljske skorje, plazenjem hribin...
7.1 Stabilizacija točk Idealno bi bilo, če bi lahko s kontrolnimi meritvami zajeli vsako točko objekta in da bi lahko meritve izvajali kontinuirano. Ker običajno tehnično in finančno to ni izvedljivo, govorimo o tako imenovani prostorski in časovni poenostavitvi. Prostorska poenostavitev pomeni, da je objekt predstavljen s posameznimi točkami, ki so stabilizirane v deformabilno sredino in predstavljajo model objekta. Mesto stabilizacije točk na objektu določita skupaj projektant in geodet. Projektant pozna konstrukcijo objekta in lahko predvidi, kje se bodo pojavile deformacije. Geodet pa oceni, ali je možno določiti koordinato oziroma premik določene točke z ustrezno natančnostjo. Če izvajamo kontrolne meritve za potrebe določitve premikov zemeljske skorje ali plazenja hribine, potem mesto stabilizacije točk izbiramo skupaj z geologom, geofizikom ali geomehanikom. Časovna poenostavitev pomeni, da kontinuirano spremljanje točk na objektu nadomestimo s posameznimi izmerami, ki jih izvedemo v različnih časovnih obdobjih. Število točk, ki so stabilizirane na objektu in časovno razporeditev meritev izberemo tako, da izgubimo zanemarljivo informacij o premikih in deformacijah na objektu. Vektorji premika točk so (glej sl.3): točka A: εϕ ⋅+⋅+= aaaav ... premik točke A je posledica translacije, rotacije (ϕ) in
deformacije (ε) stolpa, točka B: ϕ⋅+= bbb
v ... premik točke B je posledica translacije in rotacije(ϕ) objekta,
točka C: vc c= ... premik točke C je posledica translacije objekta.
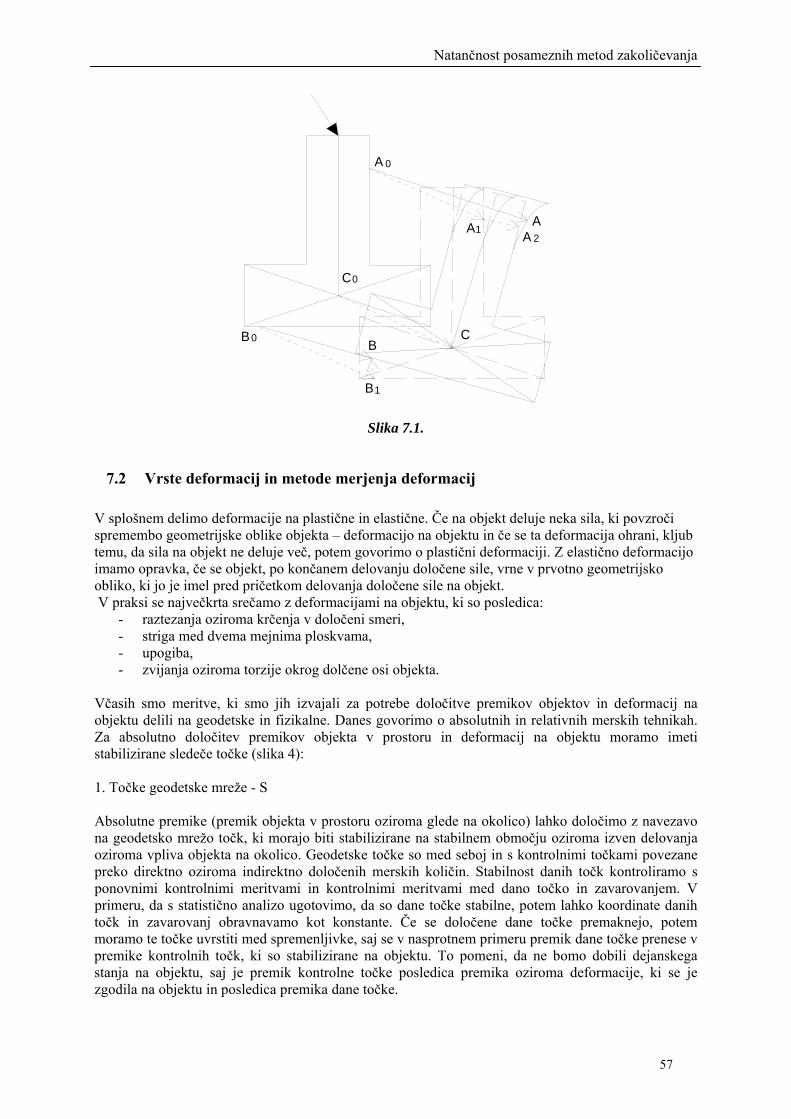
Natančnost posameznih metod zakoličevanja
57
A
A AA
0
12
C
B B
B
C0
0
1
Slika 7.1.
7.2 Vrste deformacij in metode merjenja deformacij V splošnem delimo deformacije na plastične in elastične. Če na objekt deluje neka sila, ki povzroči spremembo geometrijske oblike objekta – deformacijo na objektu in če se ta deformacija ohrani, kljub temu, da sila na objekt ne deluje več, potem govorimo o plastični deformaciji. Z elastično deformacijo imamo opravka, če se objekt, po končanem delovanju določene sile, vrne v prvotno geometrijsko obliko, ki jo je imel pred pričetkom delovanja določene sile na objekt. V praksi se največkrta srečamo z deformacijami na objektu, ki so posledica:
- raztezanja oziroma krčenja v določeni smeri, - striga med dvema mejnima ploskvama, - upogiba, - zvijanja oziroma torzije okrog dolčene osi objekta.
Včasih smo meritve, ki smo jih izvajali za potrebe določitve premikov objektov in deformacij na objektu delili na geodetske in fizikalne. Danes govorimo o absolutnih in relativnih merskih tehnikah. Za absolutno določitev premikov objekta v prostoru in deformacij na objektu moramo imeti stabilizirane sledeče točke (slika 4): 1. Točke geodetske mreže - S Absolutne premike (premik objekta v prostoru oziroma glede na okolico) lahko določimo z navezavo na geodetsko mrežo točk, ki morajo biti stabilizirane na stabilnem območju oziroma izven delovanja oziroma vpliva objekta na okolico. Geodetske točke so med seboj in s kontrolnimi točkami povezane preko direktno oziroma indirektno določenih merskih količin. Stabilnost danih točk kontroliramo s ponovnimi kontrolnimi meritvami in kontrolnimi meritvami med dano točko in zavarovanjem. V primeru, da s statistično analizo ugotovimo, da so dane točke stabilne, potem lahko koordinate danih točk in zavarovanj obravnavamo kot konstante. Če se določene dane točke premaknejo, potem moramo te točke uvrstiti med spremenljivke, saj se v nasprotnem primeru premik dane točke prenese v premike kontrolnih točk, ki so stabilizirane na objektu. To pomeni, da ne bomo dobili dejanskega stanja na objektu, saj je premik kontrolne točke posledica premika oziroma deformacije, ki se je zgodila na objektu in posledica premika dane točke.

Natančnost posameznih metod zakoličevanja
58
2. Kontrolne točke na objektu - P Vsak preizkušan objekt je predstavljen z ustreznim številom kontrolnih točk, ki so stabilizirane v deformabilno sredino. Tako lahko določimo relativne in absolutne premike, saj kontrolne točke sledijo premiku in deformaciji, ki se je zgodila na objektu. Koordinate kontrolnih točk so med posameznimi izmerami spremenljivke, povezavo med kontrolnimi točkami dobimo preko direktno oziroma indirektno merjenih količin (dolžine, koti, višinske razlike...). Relativni premiki so osnova za določitev geometrijske oblike in njenih sprememb, problem pa predstavlja datum geodetske mreže.
x
y
p
s z
Kontrolna meritev
Absolutna
določitev
Relativna določitev
x
xs
syyp
p
Spremenljivka
Konstanta (dano)
Konstanta (dano)
Kontrolna meritev
Slika 7.2. Geometrijski model objekta
7.3 Deformacijski modeli Na 2. kongresu o Deformacijskih merjenjih, ki ga je organizirala 6. komisija - Geodezija v inženirstvu v okviru Mednarodne zveze geodetov (FIG) v Bonnu leta 1978, so izbrali 5 univerzitetnih centrov (Hannover, Delft, Karlsruhe, München, Fredericton), katerih naloga je bila, da poskušajo uskladiti različne teoretične postopke deformacijske analize. V ta namen so določili 3 numerične primere, na osnovi katerih je kasneje bilo možno izvesti primerjavo rezultatov. Rezultat raziskave naj bi bil izdelan predlog za reševanje naslednjih problemov v deformacijski analizi: - izbor optimalne konfiguracije (oblike) geodetske mreže in določitev plana opazovanj, - izbor vrste opazovanj in instrumentarija, - določitev numeričnih strategij za določevanje premikov in deformacij, - izbor postopkov za statistično analizo deformacijskih modelov.
7.3.1 KINEMATIČNI DEFORMACIJSKI MODEL - HANNOVER Kadar deformacije ne moremo predstaviti, kot funkcijo spremembe vplivne količine (dinamični deformacijski model), potem deformacije na objektih predstavimo kot funkcijo časa (kinematični deformacijski model), kar se v praksi bolj uporablja. Grafično je modeliranje deformacije prikazano na spodnji sliki. V bližini poljubnega časa t0, lahko deformacijo na objektu opišemo z enačbo:

Natančnost posameznih metod zakoličevanja
59
2)t(t
)(ty)t(t)(ty)y(t =y(t)2
00000
−⋅+−⋅+ &&& (7.1)
&y(t )0 . . . hitrost poteka spremembe deformacije, &&y(t )0 ... pospešek poteka spremembe deformacije. Pospešek nam omogoča oceniti bodoče dogajanja
na objektu. Tako velja: če je pospešek spremembe deformacije pozitiven, potem se bo objekt hitreje deformiral, kar pomeni, da obstaja možnost destabilizacije objekta. Če je pospešek spremembe deformacije negativen, potem se bo hitrost deformacije zmanjševala. V tem primeru se bo objekt počasi umiril oziroma konsolidiral. Če je pospešek spremembe deformacije enak nič, potem se bo trenutna hitrost deformiranja objekta ohranila.
7.3.2 PROGRAM MERITEV IN MERSKI POSTOPKI V okviru deformacijske analize dobimo tudi določene kriterije, na osnovi katerih izberemo merski postopek. Osnovni kriteriji na osnovi katerih izbiramo merski postopek so: - zahtevana natančnost določitve deformacij, - število meritev in časovni razpored meritev, - čas, ki je na voljo za izvedbo posamezne izmere. Pri obravnavi omenjenih kriterijev moramo upoštevati tudi dve značilni deformaciji - a periodično in periodično deformacijo. 7.3.2.1 a) Aperiodična deformacija Na spodnji sliki je grafično predstavljeno zajemanja a periodične deformacije.
y0
yk
Δy - maksimalna deformacija
t0 t t
Deformacija
tA i i+1 tkČas
Začetno stanje -
Končno stanje -
Δt
δt
δy
Slika 7.3
Na sliki 5 so: Δt . . . čas med dvema izmerama δt . . . čas izmere δy . . . minimalni prirastek deformacije a1) Določitev zahtevane natančnosti oziroma ločilne sposobnosti instrumentarija oziroma merskega
postopka - σy Zahtevana natančnost je povezana s pričakovano maksimalno deformacijo Δy, ki je določena z enačbo: Δy = yk - y0 (7.2)

Natančnost posameznih metod zakoličevanja
60
Če izhajamo iz maksimalne pričakovane deformacije, ki jo obravnavamo kot dovoljeno odstopanje, potem mora biti:
σy ≤ 10Δy (7.4)
Ker maksimalne pričakovane deformacije ne poznamo oziroma je lahko določena nezanesljivo, nas običajno bolj zanima minimalni prirastek - δy. Minimalni prirastek δy je minimalna razlika med dvema stanjema deformacije, ki jo še lahko določimo z zanesljivo natančnostjo (t.j. s stopnjo zaupanja vsaj 95 %). Tako lahko minimalni prirastek δy uporabimo kot mero za določitev ločilne sposobnost instrumenta oziroma merskega postopka. Ustrezno zanesljivo ločilno sposobnost dobimo, če namesto enačbe (19) zapišemo:
σy ≤ y
5δ
(7.5)
a2) Določitev števila meritev in časovnega razporeda meritev - Δt V najenostavnejših primerih nas zanima samo skupna deformacija. V tem primeru imamo opravka s primerjavo začetnega stanja objekta, ob času tA, ki leži tik pred začetkom deformiranja objekta, ki se prične ob času t0 in s končnim stanjem objekta, ob času tk. Seveda nas običajno zanima časovni potek deformacije, ki ga lahko določimo, če izvedemo več izmer ob času ti, ti+1, itd, dokler deformacija ne doseže končnega stanja. Časovni zamik med posameznimi izmerami, Δt = ti+1-ti , je prilagojen hitrosti deformacije in ločilni sposobnosti merskega instrumenta oziroma merskega postopka. Hitrost deformacije v poljubnem času tj je:
⎟⎠⎞
⎜⎝⎛
ty
t
= y
jδδ
& (7.6)
Če želimo zanesljivo določiti spremembo deformacije, ki se je zgodila med dvema izmerama, potem sprememba deformacije v času Δt, ne sme biti manjša od ločljivosti merskega sistema. Da bomo omenjeno zahtevo izpolnili, mora biti izpolnjen sledeči pogoj:
ty Δ⋅& ≥ δy (7.7) Če Povežemo enačbi (22) in (20), potem dobimo približno enačbo za izračun časovnega razmika med dvema izmerama:
yσ
5t y
&⋅=Δ (7.8)
Enačba (23) je le približna ocena, saj na začetku nimamo z zadovoljivo natančnostjo določene hitrosti deformacije &y , kar pomeni, da je ustreznejša ocena možna po več izmerah. Poleg tega običajno aperiodične deformacije na začetku opazujemo bolj pogosto, saj je hitrost deformiranja objekta na začetku večja, kot kasneje, ko se deformacija umirja. Tako lahko za konstantne časovne zamike med posameznimi izmerami trdimo, da so negospodarni. a3) Določitev dolžine trajanja posamezne izmere - δt

Natančnost posameznih metod zakoličevanja
61
Osnova zahteva, ki mora biti izpolnjena, je ta, da moramo posamezno izmero izvesti tako hitro, da so vse točke na objektu določene v primerljivem stanju deformacije. Dolžina trajanja posamezne izmere je odvisna od: - pričakovane maksimalne hitrosti deformacije &y max - natančnosti merskega postopka, ki ga največkrat izbiramo na osnovi zahteve:
max
y
yσ
δt&
≤ (7.9)
Če primerjamo enačbo (24) z enačbo (22), potem lahko dobimo povezavo med priporočljivim časom, ki ga imamo na voljo za izvedbo posamezne izmere δt in časovnim zamikom med posameznimi izmerami Δt:
δt ≤ Δt5
(7.10)
7.3.2.2 b) Periodične deformacije Na spodnji sliki je predstavljena grafična predstavitev zajemanja periodične deformacija
časti
yDeformacija
TpTrajanje periode
Δy
Širina nihaja
Δt
t i + 1 t i + 2
y
y
min
max
Slika 7.4: Na sliki 6. so: Δt . . . čas med dvema izmerama Tp . . . trajanje periode Δy . . . širina nihaja b1) Določitev zahtevane natančnosti merskega postopka - σy Tudi v tem primeru lahko zahtevano natančnost merskega postopka povežemo s pričakovano širino nihanja deformacije Δy: Δy = ymax - ymin (7.11) Če to vstavimo v enačbo (19), dobimo:

Natančnost posameznih metod zakoličevanja
62
10yy
σ minmaxy
−≤ (7.12)
b2) Določitev števila meritev in časovnega razporeda meritev - Δt V primeru, ko imamo opravka s periodično deformacijo je smiselna razdelitev na konstantne časovne razmike Δt med posameznimi izmerami, ki so odvisni od trajanja periode Tp.
Δt = Tm
p (7.13)
m ... število meritev v eni deformacijski periodi (2 ≤ m ≤ 20) Če opravimo dve meritvi (m = 2), potem nas zanimajo le ekstremne vrednosti, kar pomeni, da poskušamo določiti ymin in ymax. Seveda je v tem primeru zelo težko določimo trenutek, ko nastopita obe ekstremni vrednosti deformacije na posameznem objektu. Zgornja meja (m = 20) je določena iz zahteve, da verjetna deformacija med dvema opazovanjema, v času Δt, ne sme biti manjša od ločilne sposobnosti merskega postopka (glej enačbo 20). Poleg tega sta upoštevani še sledeči predpostavki:
1. potek deformacije je približno sinusen, 2. srednja hitrost &y je določena na osnovi verjetnega nihaja Δy in trajanja periode Tp.
&y = y
Tp
Δ (7.14)
b3) Določitev dolžine trajanja posamezne izmere - δt S podobno predpostavko lahko določimo tudi sprejemljivo trajanje posamezne izmere δt:
δt ≤ pT
150 (7.15)
7.3.3 PRENOS (POVEZAVE) ZAHTEV NA (Z) GEOMETRIJSKIM MODELOM OBJEKTA Deformacijski model predstavlja osnovo za ovrednotenje posameznih zahtev, ki jih moramo izpolniti pri merjenjih. Ko te zahteve prenesemo na geometrijski model objekta, potem zahteve dobijo konkretni (praktični) pomen. Tako moramo z geometrijskim modelom objekta povezati sledeče: 1. Zahtevano natančnost σy meritev za potrebe določitve deformacij na objektih Ker geometrijski model objekta predstavljajo točke, ki so stabilizirane v deformabilno sredino objekta, deformacije določimo na osnovi sprememb koordinat točk. Glede na zahtevano natančnost določitve deformacije, določimo zahtevano natančnost določitve koordinat točk σx, σy (absolutna določitev) in σΔy, σΔx za spremembe koordinat točk (relativna določitev). 2. Priporočeno število meritev in časovni razpored posameznih meritev za posamezne kontrolne točke V splošnem velja, da je na istem objektu lahko hitrost in smer deformacije ( &y ) za posamezne kontrolne točke različna. Tako imamo za posamezne točke različni čas med posameznimi izmerami. V tem primeru točke s krajšim časom med posameznimi izmerami določimo z vmesnimi izmerami.

Natančnost posameznih metod zakoličevanja
63
3. Sprejemljivo dolžino trajanja posamezne izmere δt V primeru, ko imamo opravka z zelo različnimi hitrostmi deformacije ( &y ) na objektu ali določenem območju, potem so različni tudi časi δt, ki jih imamo na voljo, da izvedemo meritev. Tako izdelamo program meritev in izberemo merski postopek na osnovi najkrajšega δt. Alternativo temu predstavlja upoštevanje različno dolgih časov δt za posamezne točke. Seveda potem na objektu uporabimo različne merske postopke in različni instrumentarij. Takšno stanje srečamo le v ekstremnih primerih. V splošnem pa generaliziramo.
x
y
T
T
i
j
x
y
x
yi
i
j
j
Δx
Δy
Slika 7.5
7.3.4 IZBIRA MERSKEGA POSTOPKA Ko imamo določene zahteve in ustrezen program meritev, potem lahko izberemo merski postopek. Izbira je mersko tehnični problem s številnimi možnimi nalogami in zelo različnimi mejnimi pogoji, ki jih ne moremo ovrednotiti s togimi pravili. Tako vsak primer zahteva svojo ovrednotenje zahtev, mejnih pogojev in analizo, ki nam omogočajo izbrati ustrezni merski postopek. V splošnem pa pri izboru merskega postopka upoštevamo sledeče robne - mejne pogoje: 1. Zahtevano natančnost merskega postopka Iz predhodnih analiz dana zahtevana natančnost določitve koordinat točk in natančnost določitve koordinatnih razlik kontrolnih točk (položaj in višine). V splošnem so koordinate točk določene z indirektno metodo, z izmero povezovalnih elementov med danimi in novimi točkami. Geometrični model objekta ne definira povezovalne elemente in način povezave - (koti, dolžine, višinske razlike...), vendar lahko z ustreznimi izkušnjami hitro določimo posamezne povezovalne elemente in kako jih določimo. Ali mreža geodetskih in kontrolnih točk ustreza zahtevani natančnosti preizkusimo s predhodno izravnavo in analizo natančnosti določitve koordinat točk. Zato potrebujemo: - mrežo geodetskih točk in povezovalne elemente, - natančnost posameznih merskih postopkov in instrumentov (uporabimo lahko podatke o natančnosti instrumentov, ki jih navaja proizvajalec v tehnični dokumentaciji, boljše: opravimo preizkus instrumenta po ustreznem DIN/ ISO standardu v čim bolj podobnih razmerah, kot bo kasneje potekala izmera, saj meteorološki vplivi na natančnost izvajanja meritev niso zanemarljivi).
Natančnost posameznih metod zakoličevanja
64
2. Čas, ki ga imamo na voljo, da izvedemo posamezno izmero Izmero moramo zaključiti v nekem času δt, drugače nam deformacija na objektu “pokvari” rezultate izmere. Čas, ki ga imamo na voljo za izvedbo izmere je odvisen od hitrosti deformacije in zahtevane natančnosti izmere. Pri počasnih deformacijah (n .pr. z letno periodo) imamo za izvedbo izmere na voljo tudi dan ali več. V tem primeru lahko izmerimo obsežne geodetske mreže s klasičnimi geodetskimi merskimi postopki. Pri večjih hitrostih deformacije je čas, ki ga imamo na voljo za izvedbo izmere krajši (nekaj minut/ur), kar pomeni da kontrolne točke težko spremljamo vizualno oziroma s klasičnimi geodetski merskimi postopki. V tem primeru opazujemo malo kontrolnih točk oziroma uporabimo avtomatizirane merske postopke (tudi fotogrametrijo). 3. Ekonomičnost - gospodarnost izvedbe merskega postopka Ko ocenjujemo ekonomičnost - gospodarnost merskega postopka imata velik vpliv število meritev in časovni razpored meritev. Skupni strošek za potrebe določitve deformacij na objektih lahko razdelimo v: a) Stroški za nastavitev sistema - projektiranje, stabilizacija točk, namestitev posebnih konzol za stojišča instrumentov, namestitev sistemov za kontinuirano spremljanje premikov, - programska oprema za obdelavo in izvrednotenje merskih podatkov in rezultatov meritev. b) Stroški za zagon/izvedbo posamezne izmere - priprava osebja in instrumentarija, začasna signalizacija točk... c) Stroški za izmero - izvedba izmere, obdelava podatkov, izravnava meritev in analiza merskih rezultatov. d) Stroški za vzdrževanje - gre za zaščito sistema pred uničenjem in poškodbami (označevanje točk, merski pribor) Višina posameznih stroškov je predvsem odvisna od izbire merskega postopka in je v splošnem zelo različna. Običajno višja vlaganja v nastavitev sistema pomenijo manjše stroške za izvedbo posamezne izmere. Če imamo malo izmer, potem so začetni stroški relativno nizki in drage posamezne izmere. V tem primeru so klasične geodetske merske metode konkurečne. Če imamo planiranih veliko izmer, potem so začetni stroški veliki, saj običajno v tem primeru investiramo v ustrezne avtomatske merske sisteme, ki omogočajo kontinuirano spremljanje premikov in deformacij na objektu. Poleg tega je potrebno zagotoviti tudi ustrezno programsko in strojno opremo, s pomočjo katere lahko ustrezno izvrednotimo merske podatke.
7.3.5 OSTALI KRITERIJI IN MEJNI POGOJI ZA IZBOR MERSKEGA POSTOPKA Upoštevati moramo tudi mejne pogoje, ki so značilni za posamezni objekt, kot so:
- merski postopek ne sme povzročiti dodatnih premikov in deformacij na objektu, kar pomeni, da izberemo merski postopek, ki objekt ne dodatno obremenjuje oziroma direktni pristop ni nujen,
- izmera na objektu je lahko nevarna ali je možna le v določenem pogonskem stanju, kar moramo upoštevati pri izboru merskega postopeka,

Natančnost posameznih metod zakoličevanja
65
- za objekte, katerih deformacije ali premiki so nevarni za širšo okolico (različne pregrade), uvedemo sisteme, ki omogočajo kontinuirano spremljanje premikov in alarmiranje v primeru premikov, ki odstopajo od pričakovanih vrednosti,
- pri posameznih kontroliranih preizkusih deformiranja objektov morajo biti rezultati takoj na voljo (prevzem premostitvenih objektov pri prometnicah - preizkus z obtežbo), ker je nadaljnji preizkus odvisen tudi od predhodnih rezultatov,
- natančne meritve na objektu lahko izvajamo le v primeru, ko so ostale aktivnosti na objektu ustavljene ali potekajo konstantno. Želja po čim manjši motnji proizvodnje je tako lahko odločilna, ko izbiramo ustrezni merski postopek
- opravka imamo tudi z izmerami, s katerimi želimo zajeti prvotno stanje objekta, ki nam kasneje omogoča, v primeru poškodb, ustrezno adaptacijo objekta. Tako naslednjo izmero izvedemo le v primeru, če želimo ugotoviti velikost deformacije in s tem nastalo škodo. V teh primerih so zelo primerni fotogrametrični merski postopki, saj izvrednotenje posnetkov opravimo le če je potrebno.

Natančnost posameznih metod zakoličevanja
66
8 TRENDI RAZVOJA Avtomatizacija geodetskih merskih tehnik in merskih postopkov je v zadnih desetih letih skupaj z napredkom računalniške tehnologije povročila razvoj novih geodetskih instrumentov in merskih algoritmov. K temu lahko štejemo motorizirani oz. avtomatizirane tahimetre različnih proizvajalcev z notranjimi in zunanjimi pomnilnimi enotami, z daljinskim radijskim prenosom podatkov, ki jih lahko upravlja samo en operater, pa tudi prenosne računalnike v Windows okolju. Povezava dveh visoko natančnih teodolitov v skupen merski sistem, ter povečanje natačnosti merjenja dolžin, omogoča doseganje visoke natančnosti določanja koordinat bližnjih točk. Skupna obdelava terestičnih podatkov in GPS meritev omogoča realizacijo novih merskih konfiguracij pri določanju koordinat točk, ki se lahko bistveno razlikujejo glede na dosedanje postopke. Poleg osnovnega namena merjenja nam meritve horizontalnih smeri, vertikalnih kotov in dolžin skupaj z zmogljivo strojno opremo omogočajo zajemanje dodatnih informacij. To vodi do tega, da pri geodetskih merskih tehnikah ne govorimo več o merskih napravah oziroma instrumentih, ampak se vse bolj uporablja pojem merski senzor, ki natančeje opredljuje zmogljivost in kompleksnost merskega sistema. Primer takšnega sistema je elektronski tahimeter, ki je sestavljen iz naslednjih senzorjev: senzor horizontalnih kotov, senzor vertikalnik kotov, senzor indeksnega pogreška, senzor za merjenje dolžin, senzor osi..skupek teh senzorjev pa je povezan z mikroprocesorjem in omogoča izračun koordinat v poljubno orientiranem koordinatnem sistemu. Takšni multi senzorski sistemi so uporabni v številnih nalogah iz inženirske geodezije. Omogočajo optimalno reševanje različnih problemov, ki se pojavljajo skozi merski proces.Različni senzorji so povezani v merski sistem, ki ga nadzorujemo in krmilimo z procesnim računalnikom. Izvrednotenje rezultatov meritev je možno izvesti ali v realnem času ali pa po zaključku merskega procesa. Pri tem se v vse večji meri uporabljajo razni rekurzivno delujoči algoritmi ( Kalman filter) ali pa različni postopki izravnave. Za avtomatizacijo merskega postopka se v povezavi z elektronskimi tahimetri uporabljajo tudi CCD kamere. S tem senzorskim sistemom pridobimo v tem, da imamo najmanj dve različni meritvi, ki jih lahko z različnimi merskimi principi skupno obdelujemo in s tem dosegamo večje natančnosti. Vse to vodi do tako imenovanih hibridnih merskih procesov. Mersko vrednost posameznega senzorja lahko v povezavi z merskim rezultatom doponjujemo, kontroliramo. Danes samo geometričen opis velikosti in položaja objekta v večini problemov, ki jih postavlja znanost oziroma posamezni naročniki ni dovolj. Tako morajo geodeti, ki delujejo na področju inženirske geodezije, svoje meritve doponjevati z merskimi senzorji in merskimi metodami, ki se uporabljajo v drugih strokah (geotehniki, gradbeništvu, strojništvu itd). Vse to omogoča podajanje celovitejše slike določenega merskega problema, kar je običajno tudi zahteva naročnika. Vse to pa od geodetov v prihonjosti zahteva pozavanje merskih senzorjev in principov merjenja drugih strok in njihovo skupno uporabo pri reševanju posameznih merskih problemov. Opremljanje elektronski tahimetrov s servo motorji omogoča poleg običajnih statičnih in kvazi statičnih merskih postopkov določanje tudi kinematičnega vedenja posameznih gradbenih objektov. Pri kinematičnih meritvah so lahko senzorji pritrjeni na objekt in se tako registrirajo premiki senzorja, ( GPS, Kamere) ali pa sledijo premikom iz izbranih stabilnih točk ( elektronski tahimetri, digitalni fotogrametrični sistemi, laserski senzorji) Zanimiva je tudi uporaba kinemtičnih merskih metod pri krmiljenju in pozicioniranju gradbenih strojev. Z razvojem digitalnih nivelirjev skupaj z GPS meritvami lahko tudi določanju višin govorimo o skokovitem napredku. Ti novi načini merjenja višin oziroma višinskih razlik bodo v prihonjosti v vedno večji meri zamenjevali optične postopke meritev.

Natančnost posameznih metod zakoličevanja
67
Inženirska geodezija ustvarja skupaj z velikim obsegom zajema točk ( 500 do 600 točk na dan) osnovo za različne geoinformacijske sisteme, ki predstavljajo bazo za interdisciplinarjo planiranje in odločanje. Takšni informacijski sistemi, ki so v Evropi poznani že od 80-tih let, so nujno potrebni za kvalitetno gospodarjenje s prostorom.
9 PREGLED STANJA V SLOVENIJI Z deli, ki spadajo v področje inženirske geodezije se občasno ukvarja pretežen del geodetov, ki delujejo v takoimenovani izvajalski veji geodezije. Res je, da gre pri tem običajno za enostavna dela, ki ne zahtevajo posebno visoke natančnosti. Večinoma gre za zakoličbe stanovanjskih in poslovnih objektov, občasno pa tudi industrijskih zgradb. Večja dela na področju inženirske geodezije, kamor spadajo geodetska dela pri gradnji cest, železnic in različne komunalne infrastrukture opravljajo večja geodetska podjetja, ki lahko celovito rešujejo geodetske naloge na posameznem projektu. Zelo malo pa je geodetov v Sloveniji, ki bi svojo dejavnost opravljali izključno na področjo inženirske geodezije oziroma, bi bili specializirani za posamezne visoko zahtevne meritve v gradbeništvu in strojništvu. Vzrok za takšno situacijo na eni strani predstavlja majhnost našega trga, ki ekonomsko ne opravičuje vlaganja v visoko natančno mersko opremo in z njo povezano znanje. Drugi razlog pa lahko najdemo tudi v zakonskih podlagah (npr.: Zakon o graditvi objektov, Zakon o urejanju prostora, itd.), ki geodetsko stroko ne obravnavajo enakovredno ostalim strokam, ki sodelujejo v procesu izradnje posameznega objekta. Večinoma je geodezija zreducirana na nivo uslužnostne dejavnosti. Seveda pa smo za nastalo stanje krivi geodeti sami, ki smo premalo agresivni v odnosu do drugih strok.

Natančnost posameznih metod zakoličevanja
68
10 LITERATURA Cvetković Č.: Primena geodezije v inženjerstvu, Građevinska knjiga Beograd 1970. Janković M.: Inženjerska geodezija I, II in III. Del, Zagreb 1981 Begović A.: Inženjerska geodezija I, Naučna knjiga Beograd, 1988 Moeser M., Mueller G., Schlemmer H., Werner, H.: Handbuch Ingeniervermessung – I. del: Grundlagen, Wichmann Verlag, 2000 Moeser M., in dr.: Handbuch Ingeniervermessung – Auswertung geodaetischer Ueberwachungsmessungen, Wichmann Verlag, 2000 Mihajlović K.: Geodezija II, 1. del, Građevinska knjiga, Beograd 1981
Mihajlović K.: Geodezija II, 2. del, Naučna knjiga, Beograd 1987
Fachhochschule Bochum: http://www.fh-bochum.de/fb5/baeumker/physik/ingv6_teil3.pdf
Fachhochschule Bochum: http://www.fh-bochum.de/fb5/baeumker/physik/ingv6_teil4.pdf
Leica Geosystems AG: http://www.leica-geosystems.com/
Universität Leipzig: http://www.uni-leipzig.de/vermessung/Scripte/
11 VPRAŠANJA Kakšno je stanje glede zakonskih podlag, ki urejajo oziroma bi morale urejati področje geodezije v inženirstvu? Naštej faze geodetskih del pri gradnji objektov in opiši vlogo geodezije v posamezni fazi izgradnje objektov? Katere naloge sestavljajo postopek zakoličevanja Naštej in opiši metode horizontalne zakoličbe točk Načini reševanja problema merske natančnosti in toleranc Računanje volumnov pri linijskih objektih Razlike med računanji volumna na osnovi rastrske mreže in tahimetričnega posnetka Kaj je prostorska in časovna poenostavitev, ki jo uporabimo pri kontrolnih meritvah? Kako izdelamo program meritev in kaj nam vpliva na izbor merskega postopka pri aperiodičnih oziroma periodičnih deformacijah? Kakšni so trendi razvoja inženirske geodezije.





























