Embed Size (px)
Citation preview

Diplomarbeit
Hardware-based Timing
Synchronization
ausgefuhrt zum Zwecke der Erlangung des akademischen Grades
eines Diplom-Ingenieurs
unter der Leitung von
Univ.Prof. Dipl.-Ing. Dr.techn. Markus Rupp
Mag.rer.soc.oec. Dipl.-Ing. Dr.techn. Sebastian Caban
Institut fur Nachrichtentechnik und Hochfrequenztechnik
eingereicht an der Technischen Universitat Wien
Fakultat fur Elektrotechnik und Informationstechnik
von
Armin Dißlbacher-Fink
Oswald Spiegelfeld-Strasse 8
4840 Vocklabruck
Vocklabruck, Dezember 2010

Abstract
In 2005, the Institute of Communications and Radio-Frequency Engineering at
the Vienna University of Technology developed a rapid prototyping system to
characterize mobile communications algorithms under real world conditions. In
order to evaluate cellular radio communication systems, this system has been
recently extended to multiple transmitters and receivers. As a consequence of
this expansion, new hardware was required that is able to synchronize all base
stations and receivers in time. In this thesis, a distributed system has been
built which handles synchronous transmission and reception of data frames at
a predefined time instant. This synchronization system consists of standalone
devices with an internal clock locked to a reference clock signal generated
by a combination of a GPS receiver and a rubidium frequency standard. The
developed synchronization system is reliable and easy to integrate into existing
rapid prototyping systems as it only requires a (usually already existing) local
area network connection to operate. It supports a lot of different inputs and
outputs for precisely timing external hardware such as linear positioning tables.
Furthermore a software tool is provided that derives optimum system settings
depending on the given local area network environment it is operated in.
i

Kurzfassung
Am Institut fur Nachrichten- und Hochfrequenztechnik der Technischen Uni-
versitat Wien wurde 2005 ein rapid prototyping System aufgebaut, das es
ermoglicht Algorithmen, die fur Anwendungen der mobilen Kommunikation
entwickelt wurden, in einem realen Ubertragungssystem zu charakterisieren.
Um Mobilfunksysteme mit mehreren Zellen abbilden zu konnen muss das Sys-
tem auf mehrere Sender und Empfanger erweitert werden. Im Zuge dieser
Umstellung wird ein System benotigt, das die Synchronisierung aller Teilneh-
mer sicherstellt. Die in dieser Arbeit entwickelten Gerate ermoglichen dies und
somit das zeitgleiche Ubertragen und Empfangen eines Datenblocks zu einem
definierten Zeitpunkt. Zum Abgleich der Uhren der einzelnen Gerate wird ein
Referenztakt verwendet, der aus einer Kombination von GPS Empfanger und
Rubidium Frequenznormal erzeugt wird (diese Technik wird auch zur Syn-
chronisierung von Mobilfunk Basisstationen verwendet [1]). Das entwickelte
System zeichnet sich durch eine einfache Integrierbarkeit in das vorhandene
Umfeld, sowie eine hohe Zuverlassigkeit aus. Weiters wird ein Softwaretool zur
Verfugung gestellt, das die optimale Anpassung des Synchronisations Systems
an die Gegebenheiten des rapid prototyping Aufbaus ermoglicht.
ii

Contents
1 Introduction 1
2 Basic Idea 3
2.1 Initialization Procedure . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Timestamp Based Triggering . . . . . . . . . . . . . . . . . . . . 4
2.3 Communication Network . . . . . . . . . . . . . . . . . . . . . . 5
2.4 Information Flow . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4.1 Initial Startup . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4.2 Announce Process Duration . . . . . . . . . . . . . . . . 7
2.4.3 Restore after Error . . . . . . . . . . . . . . . . . . . . . 8
2.5 Reference Signals . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.5.1 Clock Signal . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.5.2 Synchronization Signal . . . . . . . . . . . . . . . . . . . 9
3 Timing Unit 10
3.1 Real-Time Part . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.1 Input Clock . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.2 1PPS Signal . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.3 Reset Logic . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.4 48 Bit Counter . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.5 Compare Unit . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.6 Trigger Output . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.7 System Extension Interfaces . . . . . . . . . . . . . . . . 14
3.2 Communication Part . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 Software Architecture . . . . . . . . . . . . . . . . . . . . 18
3.2.2 Control Commands . . . . . . . . . . . . . . . . . . . . . 18
3.2.3 UART Commands . . . . . . . . . . . . . . . . . . . . . 22
3.3 Controlling the Timing Unit via Matlab . . . . . . . . . . . . . 25
3.3.1 Open Port . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3.2 Send Packet . . . . . . . . . . . . . . . . . . . . . . . . . 26
iii

3.3.3 Receive Packet . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.4 Close Port . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Performance Analysis 29
4.1 Timing Unit Characteristics . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Trigger Signal . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.2 Jitter Analysis . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 Link Characterization . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.1 Packet Loss Rate . . . . . . . . . . . . . . . . . . . . . . 33
4.2.2 Packet Delay Profile . . . . . . . . . . . . . . . . . . . . 34
4.2.3 Trigger Process Duration . . . . . . . . . . . . . . . . . . 35
4.2.4 Optimum Trigger Time . . . . . . . . . . . . . . . . . . . 38
4.3 Link Timing Comparison . . . . . . . . . . . . . . . . . . . . . . 39
4.3.1 Optical Fiber Connection . . . . . . . . . . . . . . . . . 41
4.3.2 Directive Radio Link . . . . . . . . . . . . . . . . . . . . 41
4.3.3 Low-Cost WLAN Connection . . . . . . . . . . . . . . . 42
4.4 Discussion of the Results . . . . . . . . . . . . . . . . . . . . . . 43
5 Conclusion 44
Bibliography 45
iv

1. Introduction
1 Introduction
This thesis treats a synchronization problem that occurs at a test system for
algorithms in mobile communication. The system consists of a wireless trans-
mitter, which is basically a personal computer with a digital to analog converter
board, and a wireless receiver, which is also PC based but in contrast to the
transmitter uses an analog to digital converter board. Both sides are controlled
by a Matlab1 script, which in the case of the transmitter, writes data samples
to the converter board. At the receiving side, the Matlab script then copies
the received samples from the converter board to hard disk.
Both PCs are located at different floors of an office building or could even
be located at different buildings. Now the problem arises, that even if both
converter boards are located far away from each other, they have to be started
at the same time in order to perform a wireless data transmission between the
PCs (Figure 2.1).
This thesis describes a system, that is able to synchronize two or more converter
boards by the help of a LAN2 connection and a common timing reference
delivered by a GPS3 receiver (Figure 1.1).
Chapter 2 of this thesis introduces the basic idea for solving the synchronization
problem. A general structure as well as the principle of operation is discussed.
Furthermore, all protocols and interfaces are defined.
1 Matlab is a product of The MathWorks Inc.2 LAN - Local Area Network3 GPS - Global Positioning System
1

1. Introduction
Matlabtiming
unitGPS
1PPS
CLK
TRIG
FIFOTX card
transmitter
Matlabtiming
unitGPS
TRIG
FIFORX card
receiver
common
reference
LAN
1PPS
CLK
Figure 1.1: On every site of the test system, the timing unit is responsible for syn-chronization of the transmission/reception
The first part of Chapter 3 addresses the developed hardware. Issues like
real time capability are discussed and a flexible platform for implementing the
synchronization system is presented. The second part of this chapter covers
the software structure of the developed boards. Furthermore, a set of Matlab
functions for controlling the system is introduced.
In Chapter 4, the performance of the system is analyzed and optimized with
respect to maximum data rate between transmitter and receiver.
2

2. Basic Idea
2 Basic Idea
The timing synchronization system to be developed has to operate in an al-
ready existing environment. Therefore, parts of the given infrastructure are
reused. The timing system is designed as a set of standalone units where ev-
ery unit handles synchronization of one site of the test system. Therefore the
number of units has to match the number of sites.
The basic idea to achieve synchronization is to acquire the current time via the
help of a GPS receiver. Furthermore, a local area network connection among
all sites is used to spread timestamps at which a data transmission has to be
started.
2.1 Initialization Procedure
Before the first trigger process can be started, the system has to synchronize
the internal clocks of all timing units. The synchronization procedure is started
by an UDP command to one involved unit. This unit waits for the next 1PPS 1
pulse and then tells all other units to start their local clocks at the next 1PPS
event. The other units receive this command and at the next 1PPS pulse
all clock counters start synchronous. This process only performs properly, if
the message, to start the clock at the next 1PPS event, arrives at every node
within one second.
1 1PPS - one pulse per second
3

2. Basic Idea
2.2 Timestamp Based Triggering
After successfully synchronizing, all units know the same relative time and
timestamp based triggering can be carried out. To start a trigger process,
the controlling Matlab program of one site has to tell the timing unit, located
at the same site, the time when the next conversion can be started. This
information has to be stated as a relative time difference, because the PC has
no knowledge of the precise actual time. One possible message to the timing
unit would be: ”start all converter boards in 5 ms”. The timing unit then looks
up the actual time and adds 5 ms. This results in a timestamp, that is spread
over the network to all other timing units which then trigger at the same time
their connected converter boards.
From this procedure it can be seen that a ”start conversion in 0 ms” has to
result in an error due to the network delay that the timestamp message expe-
riences. Consequently, the Matlab program has to include the network delay
into its time announcement. A method for determining an optimum value
representing the network delay, is supplied in Chapter 4.
signal generation
signal generation
signal transmission
signal transmission
signal reception signal analysis
time
time
time
transmitter 1
transmitter 2
receiver 1
trigger
trigger
trigger
Figure 2.1: Timing example with two transmitters: both transmitters and thereceiver have to be triggered at the same time to perform a datatransmission.
If the scenario is extended to two transmitters, then two timestamps for trig-
gering are spread over the network. Obviously the data transmission is only
successful, if the converter boards are started at the latest of these two in-
stances. In the other case, one of the sites is not ready to perform its destined
action. The same argument applies after extending the system to an arbitrary
number of participants. This multi user scenario can be implemented in the
timing units by simply comparing all timestamps and triggering at the largest
4

2. Basic Idea
one. This can only be done if every timing unit knows the number of incom-
ing time stamps to wait for. Therefore the number of units in the setup is
announced in the initialization phase.
The principle of trigger time announcement is not restricted to transmitting
sites only. On the receiving side, the Matlab script may need some time
to readout data from the previous transmission and it is therefore necessary
to delay the next transmission. This can be done by announcing a trigger
time, larger than the duration after which the receiving hardware is ready for
operation. Throughout the remainder of this thesis, sites which influence the
trigger process, by announcing trigger durations are called active. If a site
does not influence the trigger timing (not trigger time announcements), it is
called passive.
2.3 Communication Network
Ethernet was chosen as the communication network between the timing units.
This is convenient because the interfacing to the timing system can be done
via the same communication system as the signaling. Furthermore, Ethernet
is a standard technology that is available almost at every office. Another
advantage is the ability to interconnect different sites via the Internet, which
enables large distances between different sites. As communication protocol,
UDP2 is used. UDP has the ability to send broadcast messages which allows
to reach all other timing units by sending only one data packet. Because of
the limited resources of the timing units, this speeds up communication and
therefore enhances the system performance. The drawback, on the other hand,
is the missing error handling. Therefore, it is not guaranteed that a packet
arrives at its destination. Due to these facts some kind of error handling has
to be implemented. To allow for maximum flexibility of the system, the whole
error handling has to be done by the controlling software (Matlab script of one
site). Only few errors are reported by the timing system and the leftovers have
to be caught by appropriate timeouts. Note that the messaging is designed in
such a way that if a successful transmission is reported, the transmission has
been successful. In case this report is missing, the transmission is considered
non successful, even if this is not necessarily the case.
2 UDP - User Datagram Protocol
5

2. Basic Idea
2.4 Information Flow
The subsequent part constitutes the information flow, initiated by the available
system commands. A detailed discussion of the commands is provided in
Section 3.2.2.
2.4.1 Initial Startup
initialize
1PPS1PPS
1PPS1PPS sync.
init. Ok
Matlab 1
networkdelay
resetclock counters
sync. Ok
time
timing
unit 1timing
unit n
Figure 2.2: Initialization of the timing system
To initialize the timing system, one Matlab script has to send a command,
including the number of active and passive sites, to the timing unit located
at the same site. It does not matter which site starts the initialization be-
cause this phase affects the whole timing system. The topology information,
included in the initialize command, is spread over the timing network and the
clock counters of the system are synchronized. As a reaction to successfully
synchronizing, an ”init ok” message is sent to the initializing host. Figure 2.2
shows the information flow on setting up the timing system. Due to the net-
work delay of the link, the messages need time to travel between the units.
This delay can also be seen in Figure 2.2. The synchronization procedure
6

2. Basic Idea
is started at a 1PPS event. More details about reference signals and their
synchronization can be found in Section 2.5.
If one, or more packets are lost in the initialization phase, the ”init ok” com-
mand does never arrive. Therefore an error handling procedure has to be
implemented in the initializing host.
2.4.2 Announce Process Duration
At every active site, the Matlab script has to tell the timing system the first
possible time, when the conversion process can be triggered. Therefore, the
command is named ”trigger in x”, where x is the time difference from the
actual time to the moment the conversion can be started.
trigger in x
y = current timestamp
trigger at x+ y
trigger Ok
x
trigger Ok
. . . trigger pulse
time
Matlab 1timing
unit 1timing
unit n
Figure 2.3: Announce duration and trigger
If the trigger time is chosen without regard to the network delay, it can happen
that one member of the timing system is not able to trigger at the right time
instant. After such an event occurred, all other timing units are informed and
they pass the information to their assigned Matlab scripts. As a supporting
information, the largest time difference is reported (see ∆t in Figure 2.4).
7

2. Basic Idea
trigger in x
y = current timestamp
trigger at x+ y
trigger error ( t)
x
trigger error ( t)
. . . trigger pulse
ttime
Matlab 1timingunit 1
timingunit n
Δ Δ
Figure 2.4: Trigger error due to network delay
2.4.3 Restore after Error
In case of an error, due to lost packets or too early trigger time instances, the
system has to be reset to a defined state. This has to be done after every
trigger error and can be started by a Matlab script by sending an ”abort”
command to its assigned unit (Figure 2.5). The command is then passed to
all members of the timing system which restore their internal registers. After
a successful restore, the timing system answers with a ”ready for commands”
message and the next trigger time can be set.
2.5 Reference Signals
To allow for appropriate synchronization of all sites, the timing system needs
two supporting reference signals.
2.5.1 Clock Signal
A clock signal has to be supplied to the converter boards, which is synchronous
to the clock signals at all other sites. This can be ensured by feeding all
devices with a clock generated via one common oscillator and distributing
this clock via coaxial cables. Unfortunately, this approach is restricted to
short distances between sites, especially to sites located in the same building.
Another possibility, which is used for the transmission system discussed in
Chapter 1, is to lock a local oscillator to the reference signal of a GPS satellite.
8

2. Basic Idea
abortmeasurement
abort
ready forcommands
abort done
time
Matlab 1timing
unit 1
timing
unit n
Figure 2.5: Restore after error
2.5.2 Synchronization Signal
Figure 2.2 shows that the internal clocks of the timing units are reset at an
event, that is denoted as 1PPS. This signal has to be available at all sites
to ensure synchronization of all units. The minimum demand on this signal is
to supply at least two pulses, separated by a duration longer than the largest
single trip time in the employed network. Also the phase relation to the clock
signal has to be fixed. Like the clock signal, the 1PPS signal also can be
supplied by cables connected to one reference. But for long distances and GPS
synchronized clocks, the 1PPS signal can also be locked to a satellite.
9

3. Timing Unit
3 Timing Unit
Figure 3.1: Timing unit
This chapter shows the design of a timing unit that is appropriate to the
definition of the previous chapter. All relevant data, like schematics, layout,
source code and files for the casing are stored on a CD enclosed to this thesis.
The design was done with respect to maximum flexibility. Therefore the system
can be further enhanced or adapted to lots of different timing applications
without changing the hardware.
The developed timing unit is a standalone device. It consists of a main board
which carries all the active components and a front panel for status LEDs and
an optional JTAG1 debugger. Figure 3.1 shows the front view of a timing unit.
The design of the main board can be split up into three parts:
1 JTAG - Joint Test Action Group
10

3. Timing Unit
trig
ger
out
cloc
k in
1PP
S in
8x r
elay
out
LA
N
6V
6x d
igital
I/O
4x o
pto
in
3x s
ignal
out
COM0-2
frontpanel
8x digital I/O
rese
t
2x b
utt
on
Figure 3.2: Main board
Power supply: The power supply is located on the right side of the main board
(Figure 3.2). It converts the 6 V input voltage to 3.3 V, 1.8 V and 3.5−5.0 V.
Communication Part: The components for this part are located next to the
power supply and consist of a microcontroller and a LAN interface. This
part handles the communication among all timing units, as well as to the
Matlab script and the real time part of the board.
Real Time Part: This part occupies the largest area of the main board. The
main parts are a CPLD 2 (see largest chip on Figure 3.2) and a clock divider
chip. It is called real time, because all functions are directly implemented
in hardware, which results in a deterministic and fast system. Due to the
CPLD, all logical functions can be changed to the requirements of the spe-
cific environment by firmware updates.
2 CPLD - Complex Programmable Logic Device
11

3. Timing Unit
LAN clock divider + delay
CPLD
application
IP Stack
32-bit ARM CPU
trigger
reset
timing unit
/8
compare unit
48-bit
shift register
48-bit
counter
reset / sync.
logic
Δt
signals to trigger - target
/1
/2
/3
/4
clock
1PPS
Figure 3.3: Timing unit - schematic
3.1 Real-Time Part
The real time part mainly consists of a CPLD that is controlled by a micro-
controller. The reason for choosing a CPLD is that due to precision problems,
the required counter and compare unit cannot be implemented by software in
a microcontroller. With a CPLD it is possible to build a custom chip with
all required features by defining the hardware in VHDL3. Furthermore it is
possible to reconfigure the system by simply reprogramming the CPLD. For
example, instead of connecting external devices directly to the microcontroller,
all lines are routed through the CPLD. This enables rewiring nearly every part
without the need for soldering on the main board. With this method, the sys-
tem is very flexible and is therefore well suited for rapid prototyping systems.
In the following, all components of Figure 3.3 are discussed in detail.
3.1.1 Input Clock
The input clock to the timing unit has to be locked to the clock of the target
in order to trigger. The maximum level of the signal is 1.2 Vpp. Internally, the
CPLD is able to handle clock frequencies up to a maximum of 100 MHz. To
be able to use higher clock frequencies for the trigger target, a clock divider is
installed between the clock connector and the chip. This divider can be set to
3 VHDL - Very High Speed Integrated Circuit Hardware Description Language
12

3. Timing Unit
four different values (divide by: 1, 2, 3, 4) and therefore allows for a maximum
input frequency of 400 MHz. Furthermore, the clock signal to the CPLD can be
delayed in four steps to align the generated trigger pulse roughly between two
rising edges of the clock. This is useful because most target boards will start
working when the trigger input is high and a rising edge of the clock signal
occurs. With this method also a very large jitter of the generated trigger pulse
in the range of about a quarter of the clock period does not influence the
accuracy of the system. Therefore, it can be guaranteed that all conversion
processes are started at the same rising edge (only valid for division factor of
one).
This clock divider can not be reset at the initialization phase and therefore at
division factors larger than one, the output signal can have a different phase
compared to the other timing units. It depends on the application, if this can
be tolerated or not. In the case of a wireless transmission system, a phase shift
of the trigger signal corresponds to a virtual change in antenna distance and
since the offset is constant, this offset does not change until the next system
initialization. Furthermore, the reference clock signals of different sites are
synchronized via a GPS satellite. The jitter among the clock signals is in the
range of about four clock cycles whereas the maximum phase shift corresponds
to three clock cycles.
The divided clock is fed to the CPLD where it is again divided. This sec-
ond clock divider has the ability to be reseted at the initialization phase syn-
chronous to the 1PPS signal and, therefore, no uncertainty in phase is added.
3.1.2 1PPS Signal
The 1PPS signal is only used at the initialization phase of the system, to
reset the internal clock divider and the clock counter. Therefore, this signal
directly affects the precision of the trigger output. The 1PPS signals of different
stations have also to be locked to the same common reference. This signal has
to be supplied to the timing unit as 2.5 Vpp@50Ω pulse. As discussed in the
previous chapter, this signal can be deactivated after the initialization phase.
3.1.3 Reset Logic
The reset module inside the CPLD is activated by the microcontroller and then
resets the clock counter and clock divider synchronously to the next rising edge
13

3. Timing Unit
of the 1PPS signal.
3.1.4 48 Bit Counter
The counter starts working after successfully synchronizing the timing system.
Depending on the input clock and the setting of the divider chip, the duration
until a counter overflow occurs can vary from a few days to several weeks.
Within this time, the timestamps are uniquely defined. After an overflow
occurred, the timer again starts at zero. A counter overflow does not influence
the precision of the timing system, because it occurs at the same time at all
timing units.
3.1.5 Compare Unit
The compare unit consists of a 48 bit shift register, which is loaded with times-
tamps by the microcontroller. The content of the clock counter is continuously
compared to this register. This results in the fact that for loading new times-
tamps the compare match output has to be deactivated. Therefore, for a
successful trigger process, the next time stamp has not to be loaded before the
actual trigger occurred. In this implementation the trigger granularity is set
to 0.04096 ms (213· 1/(200 MHz)).
3.1.6 Trigger Output
The trigger output is currently set to generate a pulse. Another option is to
set the trigger output to toggle mode, which is useful for watching the signal
on an oscilloscope. On the front panel of the timing unit there are three SMA
connectors, which can also be used as trigger outputs. A further option for
the trigger is to generate a pulse, when the timing unit receives a ping request.
This option is also useful for system testing and can be activated by setting a
specific flag via the UDP interface of the timing unit.
3.1.7 System Extension Interfaces
Additional interfaces are available at the timing unit to enable the integration
of external devices into the timing system. In the current design, the extension
interfaces are remote controlled via UDP commands.
14

3. Timing Unit
Trigger on external signals: The system has the ability to generate a trigger
pulse after waiting for an external signal. In detail, this means that the
user can send a ”trigger in x” command to its assigned unit, where x is
the duration between the occurrence of the external signal and the trigger
pulse. This works under the condition that the duration x is larger than the
maximum single trip time between all timing units on the network used.
Outputs: Every timing unit has 22 outputs, eight of them are relay outputs,
the rest is directly connected to the CPLD and could also be used as inputs
(requires changes in the VHDL code of the CPLD). Currently all outputs
can be remote controlled by UDP commands.
Inputs: To connect external devices, or react to external signals, the timing
unit has four opto-coupled inputs. This inputs are designed for 12 V signals.
By changing one resistor per input, they can be configured for different input
voltages. Furthermore two switches are located at the front panel, which
are currently not used.
RS232 interfaces: Another option to interface external devices via the tim-
ing unit is via RS232. There are three of these serial ports available per
timing unit. Only RX and TX lines are available on the connectors, addi-
tionally, COM0 has the option to interconnect the handshake lines. In the
current configuration, the serial ports can be controlled by any PC via UDP
commands.
CAN interface: For further projects, a CAN4 interface was added as an option
to the timing unit. COM3 is a shared connector, which can be either used
as RS232 interface, or as CAN interface. To make use of the CAN bus, the
software for the microcontroller has to be implemented and the CAN line
driver chip has to be assembled at the bottom side of the main board.
3.2 Communication Part
This part of the timing unit consists of a 32-bit microcontroller that interfaces
the CPLD and handles communication via Ethernet. The microcontroller
including the network interface is compatible to the MCB2360 [2] board from
KEIL. Therefore, software tests can also be performed by using this evaluation
board. Every timing unit is assigned to one site by its IP address. A timing
4 CAN - Controller Area Network
15

3. Timing Unit
unit always has an address 10.0.0.x1, where x denotes the number of the site.
The Matlab script, on the other hand, is running on a PC which always uses
10.0.0.x0 as IP address, x again denotes the number of the station. A timing
unit only executes trigger commands sent by a host with a corresponding
IP address (on the correct port and from the correct port). Communication
among the timing units is carried out via subnet broadcasts. To distinguish
different connections, the timing system uses several ports. One pair of ports
is used to exchange control and status information between the assigned PC
and the timing unit. This connection is only used to send commands related to
the trigger process. Another port is used by the timing units to communicate
among them. Here the packets are broadcasted and therefore all participating
units use the same port number. Via this connection, trigger timestamps are
spread between the units and also success or error messages are transmitted.
A third broadcast port is used to control the relay outputs and the serial ports
of the units (Figure 3.5 and Table 3.1).
d
b
ac
dc
a
b
dc
dc
Timing Unit10.0.0.21
1:1 connectionfor trigger commands
Timing Unit10.0.0.31
Timing Unit10.0.0.41
Timing Unit10.0.0.11
1:nconnection
1:n c
onnec
tion
for
UA
RT
and r
elay
com
man
ds
Matlab program 10.0.0.10
Matlab program10.0.0.20
1:1
connec
tion
for
trig
ger
com
man
ds
Figure 3.4: Example for IP and port assignment
16

3. Timing Unit
FLAGS
system initialization
check for received
UDP packet
set flags depending on
received command
state-machine 1
(handle actions)
state-machine n
(handle actions)
check for received
UDP packet
check for UDP
packet to send
send packet
depending on flags
Figure 3.5: Microcontroller software
port number description
a 13571b 13570
control commands and response
c 13581d 13580
UART commands and response
e 13550 communication among timing units
Table 3.1: UDP ports used for communication (see also Figure 3.4)
17

3. Timing Unit
3.2.1 Software Architecture
The basis for the software in the microcontroller is the application note
AN10799 from NXP [3], which handles ICMP messages, ARP requests and
stores received UDP packets in a receive buffer. After system startup, the
user application continuously checks for received packets. If a command was
received, the specific flags are set, which influence the behavior of the state
machines (see Figure 3.5). The idea behind this structure is that the result-
ing system is non-blocking and several tasks can be handled in parallel by
different state machines. For example, one state machine waits for data on a
UART port and after a given timeout sends the received bytes to a PC. In
parallel, a second state-machine handles communication to the timing system
in order to prepare for the next trigger process. The system can be extended
by adding another state machine, that is controlled by additional flags, which
can be set via UDP commands. Also coupling of different state machines, or
synchronizing tasks by using common flags, can be realized.
3.2.2 Control Commands
The timing unit listens on port 13570 for UDP packets. Only packets from the
assigned IP and originator port 13571 are accepted. Commands are strings,
encapsulated in a UDP packet. Available commands for the timing system are
listed below:
Start Initialization Procedure
This command starts synchronization of the internal clock counters to the
1PPS signal. The parameters specify, how many active sites and passive sites
have to be synchronized (the sum of both has to match the number of connected
timing units). The maximum number of timing units is currently limited to
26, this is due to the selection of the IP address assignment (timing unit 0. . . 25
correspond to IP address x.x.x.1. . . x.x.x.251). By choosing an other address
structure, the number of units can be extended.
18

3. Timing Unit
command: start <active devices>,<passive devices>
parameters: char active devicesnumber of active timing units in current environ-
ment
char passive devices
number of passive timing units in current environ-
ment
answer: all units in sync\n
Announce Process Duration
With this command, the Matlab script tells the timing system when it will
have finished and the conversion process can be started. Also the values for
the output ports are included.
19

3. Timing Unit
command: trigger <relays><IO ext><IO int> <trigger in>
parameters: uint8 relays
defines the state of the relay outputs of the timing
unit. Every bit represents one output.
uint8 IO extcontrols the 3.3 V outputs on the front panel of
the timing unit. Every bit, except the highest two,
represents one output (there are only 6 outputs on
the front panel).
uint8 IO intcontrols the 3.3 V outputs available at the pin
header inside the timing unit. Every bit represents
one output.
string trigger in
the trigger time stamp is generated as the sum
of the timestamp when this message arrived at
the timing unit and the trigger in value; has to
be exactly nine characters long. For example
”000000010” means, that the synchronous pro-
cess can be started in 10 clock counter ticks(=
0.4096 ms). If only the outputs should be changed,
than ” NaN” has to be sent as the trigger
time.
answer: success!\nif all converter boards were started correct
string <time difference >
in case of an error, the system reports the largest
time difference of announced trigger time and pos-
sible start time of the synchronous process. For ex-
ample, −52 means that one unit missed the trigger
by 52 counter ticks.
outputs ok\nif only outputs had to be changed.
20

3. Timing Unit
Set Flags
This command enables or disables specific functions of the timing unit during
run time.
command: flags <flag1><flag2><flag3>
parameters: char flag1
trigger on external signal: For values different to
”0,” the conversion process is started with respect
to an external signal (see Section 3.1.7, part trigger
on external signals).
char flag2
return timestamp on ping: For values different to
”0,” the timing unit reads out the actual time-
stamp when a ping request arrives and returns the
information via a UDP message to the assigned IP
address. This feature can be used to determine
single trip times in a network.
char flag3
trigger on ping: For values different to ”0” the
timing unit outputs a trigger pulse at the reception
of a ping request. Note that only the timing unit
that received the ping outputs the pulse and not
all units.
answer: flags ok\n
Abort Current Measurement
If the last trigger process was not successful, or the success message did not
arrive, the timing system has to be reset to a defined state. The abort mea-
surement command has to be sent to one timing unit and is then spread over
the network. The system answers with an abort done message and the next
trigger process can be started.
command: abort measurement
parameters: none
answer: abort done\n
21

3. Timing Unit
Reboot Timing Unit
Reboots the timing unit. Clock counter synchronization and all settings are
lost after this command.
command: reboot
parameters: none
answer: ready for commands\n
Reset the Real Time Part
Resets the CPLD to its initial state. Clock counter synchronization is lost
after this command, therefore the whole timing system has to be initialized
again before the next trigger process can be started. This does not reset the
microcontroller flags.
command: reset
parameters: none
answer: reset done\n
Beep
Activates the system beeper inside the unit for a duration of 0.5 sec.
command: beep
parameters: none
answer: beep ok\n
3.2.3 UART Commands
Three UART ports are available per timing unit, which can be remote con-
trolled via UDP messages. In contrast to the control commands, which are
directly addressed to one unit, the UART commands are sent as broadcasts.
This enables multiple devices to react to the same UDP message and allows
to trace communication between devices with a standard packet sniffer. Every
timing unit listens on port 13580 for incoming UART commands, that were
sent from port 13581. The available commands are listed below:
22

3. Timing Unit
Set UART Baud Rate
It is possible to change the baud rate of all UART ports dynamically via UDP
commands. Due to internal clock prescaler settings of the microcontroller,
the range of baud rates is limited. Currently only rates up to 57600 baud
are supported, if higher baud rates are required, then the clock system of the
microcontroller has to be reconfigured.
command: set <device number> <uart number> <baud rate>
parameters: char device numberspecifies which timing unit has to react to the
packet
char uart number
number of UART port to change baud rate (0. . . 2)
string baud rate
must be of length five and defines baud rate for
chosen port
answer: baud rate changed\n
Print Data to UART Port
This command sends data to external devices, which are connected to a UART
port. For the sake of generality, the data to be sent has to be supplied as a
byte array.
23

3. Timing Unit
command: print <device number> <uart number> . . .
. . . <ack before transmit> <ack after transmit> . . .
. . . <length> <data>
parameters: char device numberspecifies which timing unit has to react to the
packet
char uart number
number of UART port to output data (0. . . 2)
char ack before transmit
if 6= ”0” answer message is sent before transmitting
UART data.
char ack after transmit
if 6= ”0” answer message is sent directly after
last byte has been written to the UART transmit
buffer, that is, right before the last byte is trans-
mitted.
string length
must be of length two (a maximum of 99 bytes can
be transmitted via one UDP command), specifies
the number of bytes to send
byte array data
data to send via UART
answer: print <device number> <uart number> ok\noccurs twice if both ack flags are 6= ”0”
none
if both ack flags are equal to zero
Read Data from UART Port
Data that is sent from external devices to the timing unit’s UART port is
written to an internal buffer of length 99 (same length as transmit buffer).
The reply to the read command includes the content of this buffer.
24

3. Timing Unit
command: read <device number> <uart number> . . .
. . . <length> <timeout>
parameters: char device numberspecifies which timing unit has to react to the
packet
char uart number
number of UART port to read data (0. . . 2)
uint8 length
number of bytes to receive
string timeout
must be of length three and defines the maximum
time to wait between two received bytes (granular-
ity = 1.3 ms)
answer: <device number> <uart number>
<timeout occurred> <data>
timeout occurred is of type char and is one if a
timeout occurred, otherwise it is zero
3.3 Controlling the Timing Unit via Matlab
On the PC side, appropriate UDP functions are required to send the text
commands to a timing unit. To achieve high trigger rates, the routines in-
cluded in Matlab R2007A are not practical. These commands have very high
delays in the range of several 10 ms and would significantly decrease the perfor-
mance of the timing system. Due to this fact, the required UDP routines were
implemented as C functions, which are integrated in Matlab via the MEX5
interface. The routines are based on the winsock2 library from Microsoft and
only the necessary functionality was implemented. Therefore these functions
are roughly ten times faster than the original ones. A second advantage is,
that the code is written in C and therefore can be included in other projects.
Figure 3.4 shows the information flow between the Matlab software and the
timing unit and among different timing units. In Table 3.1 the corresponding
5 MEX - Matlab Executable
25

3. Timing Unit
port numbers can be looked up. The following Matlab functions can be used
to transmit control commands from Section 3.2.2 to a timing unit.
To control the timing system, only four Matlab functions are required, which
will be described below.
3.3.1 Open Port
This function must be called before sending or receiving UDP packets. It
opens a specified port and returns a pointer that allows to use this port for
data transfer.
function: Udp connect( <input port >)
arguments: uint32 port
specifies which input port to bind
return value: uint32 pointer
pointer that identifies the bound port (in case of a
64 bit operating system, return value is of type
uint64)
3.3.2 Send Packet
Transmits a UDP packet to a specified receive address and receive port. This
function requires a pointer to a bound transmit port. Commands, as specified
in Section 3.2.2, are sent to a timing unit via this function.
26

3. Timing Unit
function: Udp send(<pointer>,<remote IP>,<remote port>,
<data array>)
arguments: uint32 pointer
pointer that identifies the transmit port (in case of
a 64 bit operating system, this is of type uint64)
string remote IP
IP address of receiver
string remote port
port which receiver is listening to
string remote IP
IP address of receiver
uint8 data array
Matlab row vector that contains data to transmit
return value: none
3.3.3 Receive Packet
This function is used to receive return messages from a timing unit. It again
needs a pointer, like the send routine. The bound port is now the one the
function listens to.
function: Udp receive(<pointer>,<timeout>)
arguments: uint32 pointer
pointer that identifies the transmit port(in case of
a 64 bit operating system, this is of type uint64)
uint32 timeout
timeout value in ms
return value: [<error value>, <data>]
int8 error valuethis value reads one in case of error and zero oth-
erwise
27

3. Timing Unit
3.3.4 Close Port
When the bound UDP port is not required anymore, the port and allocated
memory from the bind process can be released with this function. This function
should be called at the end of the Matlab code.
function: Udp close(<pointer>)
arguments: uint32 pointer
pointer that identifies the bound port (in case of a
64 bit operating system, this is of type uint64)
return value: none
28
4. Performance Analysis
4 Performance Analysis
The first part of this chapter addresses the physical properties of the timing
unit. The parameters defined in the previous chapter are now compared to
the measured quantities of the implemented system. The second part discusses
the influence of the underlying network to the system characteristics.
4.1 Timing Unit Characteristics
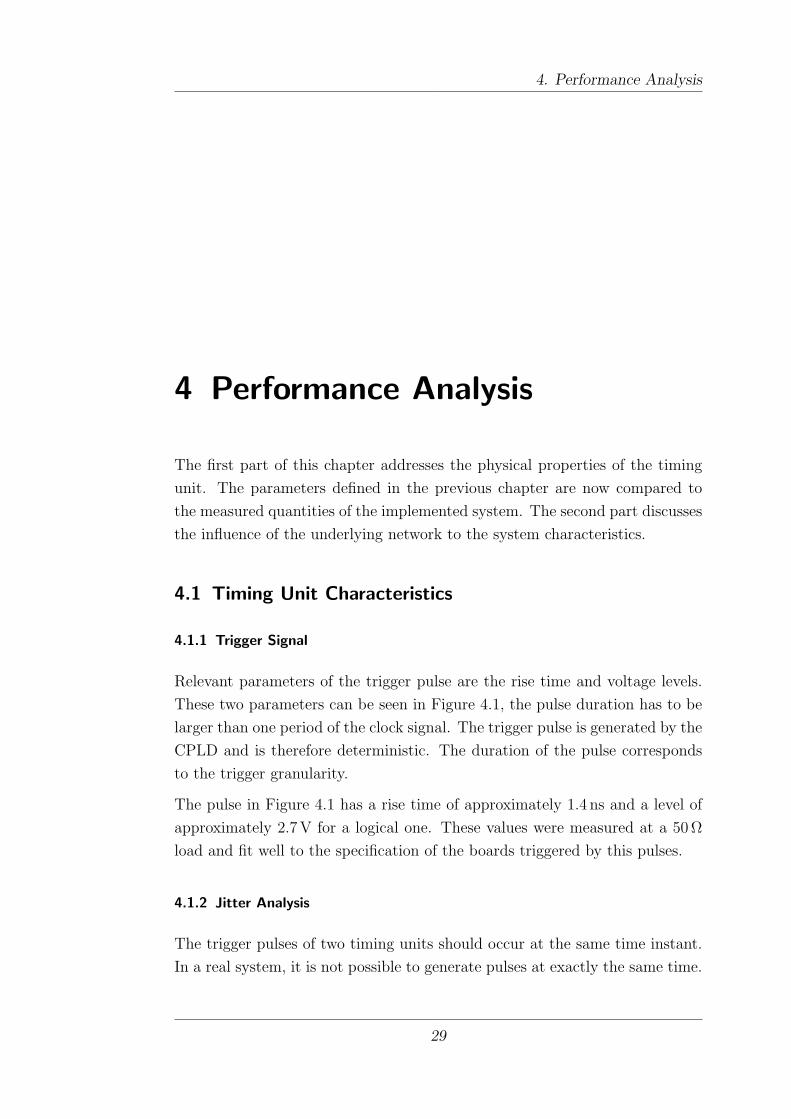
4.1.1 Trigger Signal
Relevant parameters of the trigger pulse are the rise time and voltage levels.
These two parameters can be seen in Figure 4.1, the pulse duration has to be
larger than one period of the clock signal. The trigger pulse is generated by the
CPLD and is therefore deterministic. The duration of the pulse corresponds
to the trigger granularity.
The pulse in Figure 4.1 has a rise time of approximately 1.4 ns and a level of
approximately 2.7 V for a logical one. These values were measured at a 50 Ω
load and fit well to the specification of the boards triggered by this pulses.
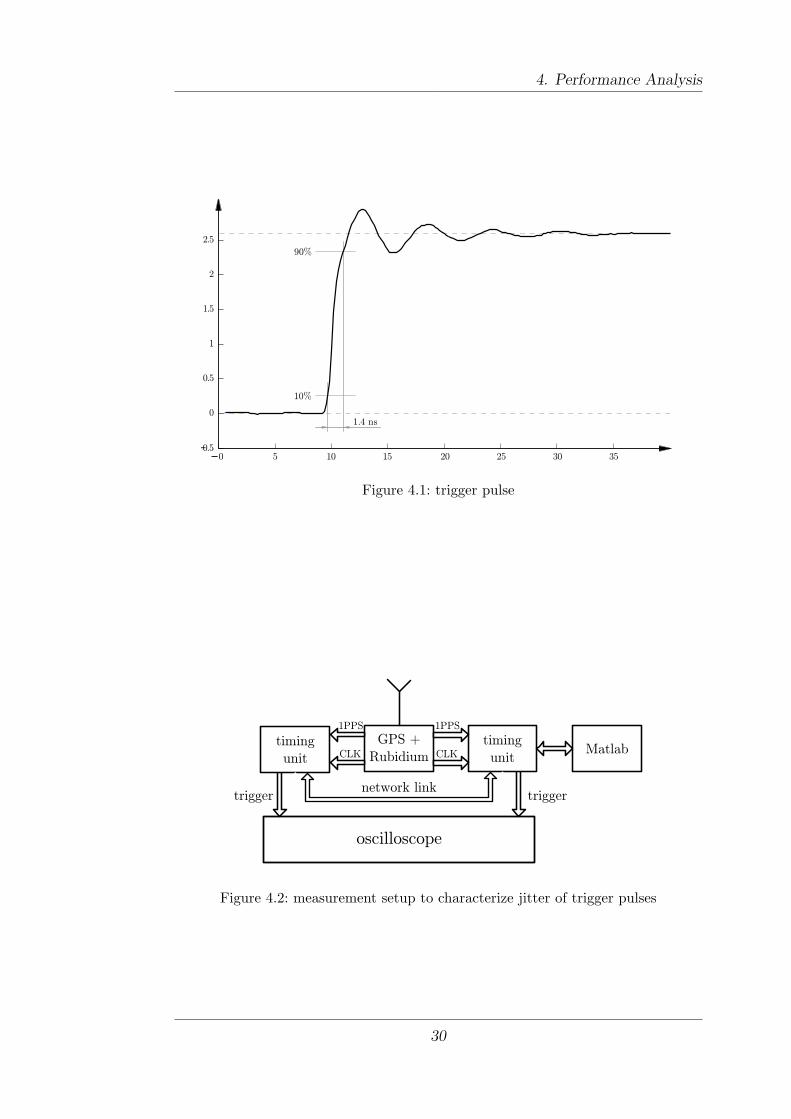
4.1.2 Jitter Analysis
The trigger pulses of two timing units should occur at the same time instant.
In a real system, it is not possible to generate pulses at exactly the same time.
29
4. Performance Analysis
−0 5 10 15 20 25 30 35−0.5
0
0.5
1
1.5
2
2.5
10%
90%
1.4 ns
Figure 4.1: trigger pulse
timingunit
GPS +Rubidium
1PPS
CLK
1PPS
CLKtimingunit
Matlab
network linktrigger trigger
oscilloscope
Figure 4.2: measurement setup to characterize jitter of trigger pulses
30

4. Performance Analysis
Nonetheless, if the jitter is small compared to the period of the reference clock,
the pulses can be considered synchronous. To verify this property, a setup as
shown in Figure 4.2 was used. The clock and the 1PPS signals for the two units
are derived from the same reference. Also the length of the signal cables is
equivalent for all units. In other words, the reference signals are synchronous
and the measured jitter is generated by the timing units only. The trigger
pulses of the units are captured by an oscilloscope and the time difference is
recorded. The result, after evaluating 108 pulses, is that the jitter is lower
than ±6 ps. Compared to the reference clock period of 5 ns (clock frequency
= 200 MHz), this value is small and therefore the pulses can be treated as
synchronous.
GPS +
Rubidium
1PPS
clktiming
unitMatlab
oscilloscope
clk triggertrigger
analog
signal
a/d
converter
Figure 4.3: measurement setup to verify if converter board is triggered correctly
The next test setup can be seen in Figure 4.3. The aim of this setup is to
measure the jitter between the trigger signal and the resulting analog signal
generated by the converter card. Only one timing unit and one converter
board is used. Both are clocked by the same reference. The signal output and
the trigger are connected to an oscilloscope. 105 trigger pulses are generated
(resulting in a measurement duration of approximately 28 hours). The result-
ing jitter between the analog signal and the trigger pulse is lower than ±0.5 ns
(reference clock period = 5 ns) and therefore the DAC always starts converting
at the same clock cycle relative to the trigger.
31
4. Performance Analysis
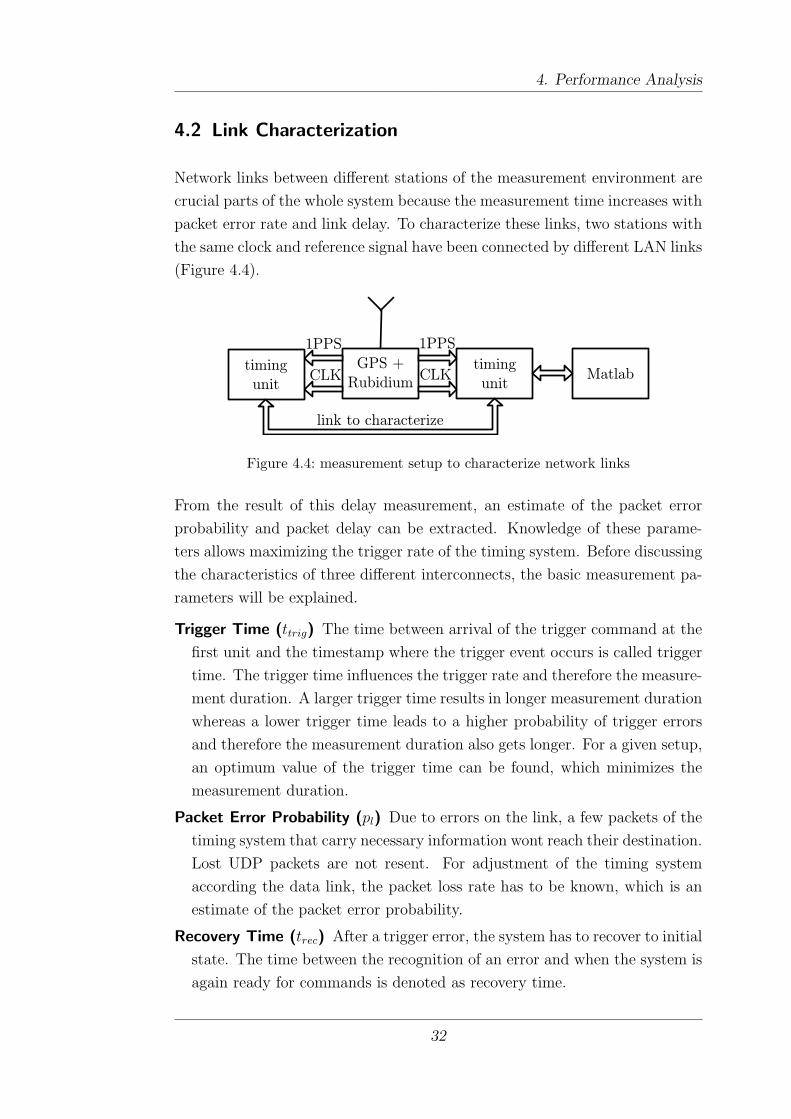
4.2 Link Characterization
Network links between different stations of the measurement environment are
crucial parts of the whole system because the measurement time increases with
packet error rate and link delay. To characterize these links, two stations with
the same clock and reference signal have been connected by different LAN links
(Figure 4.4).
timingunit
GPS +Rubidium
timingunit
Matlab
link to characterize
1PPS
CLK
1PPS
CLK
Figure 4.4: measurement setup to characterize network links
From the result of this delay measurement, an estimate of the packet error
probability and packet delay can be extracted. Knowledge of these parame-
ters allows maximizing the trigger rate of the timing system. Before discussing
the characteristics of three different interconnects, the basic measurement pa-
rameters will be explained.
Trigger Time (ttrig) The time between arrival of the trigger command at the
first unit and the timestamp where the trigger event occurs is called trigger
time. The trigger time influences the trigger rate and therefore the measure-
ment duration. A larger trigger time results in longer measurement duration
whereas a lower trigger time leads to a higher probability of trigger errors
and therefore the measurement duration also gets longer. For a given setup,
an optimum value of the trigger time can be found, which minimizes the
measurement duration.
Packet Error Probability (pl) Due to errors on the link, a few packets of the
timing system that carry necessary information wont reach their destination.
Lost UDP packets are not resent. For adjustment of the timing system
according the data link, the packet loss rate has to be known, which is an
estimate of the packet error probability.
Recovery Time (trec) After a trigger error, the system has to recover to initial
state. The time between the recognition of an error and when the system is
again ready for commands is denoted as recovery time.
32
4. Performance Analysis
Packet Delay In order to maximize the trigger rate and therefore minimize
the measurement time, the packet delay profile of the used link has to be
known. This profile has been measured with two timing units clocked by
the same reference and a special Matlab script. For analyzing the influence
to the measurement duration, the cumulative density function of the delay
profile has been evaluated. From this function the probability of error free
packet delivery, for a given trigger time, can be seen.
Timeout Duration (ttimeout) After a trigger process was initiated, the Matlab
script waits for a result message of the timing system. Due to lost packets,
this result might never arrive. The duration, after which the script aborts
the current trigger process, is called timeout duration.
Optimum Trigger Time To find the optimum trigger time for a given mea-
surement environment a cost function is used, which enables to understand
the influence of the parameters mentioned before to the total measurement
duration. Minimization of the cost function corresponds to maximization of
the trigger rate and therefore leads to a trigger time optimum in the sense
of minimum measurement duration.
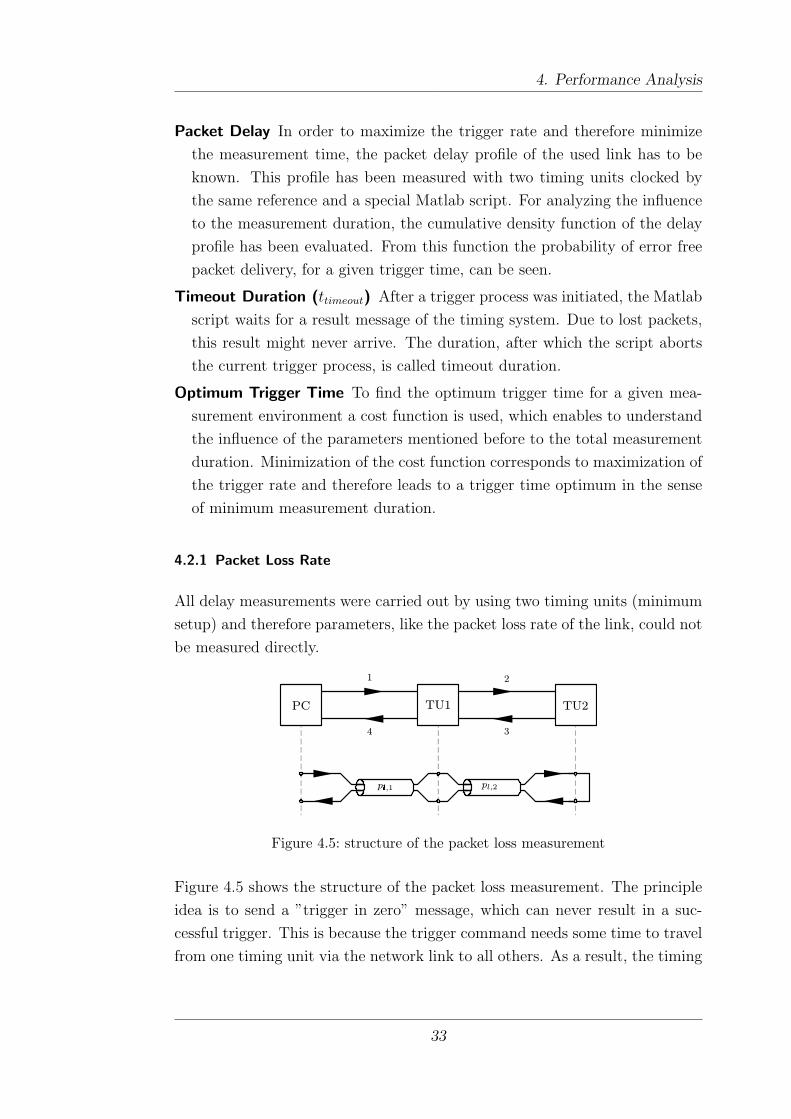
4.2.1 Packet Loss Rate
All delay measurements were carried out by using two timing units (minimum
setup) and therefore parameters, like the packet loss rate of the link, could not
be measured directly.
pllllllll;1 pl;2
PC TU1 TU2
1 2
4 3
Figure 4.5: structure of the packet loss measurement
Figure 4.5 shows the structure of the packet loss measurement. The principle
idea is to send a ”trigger in zero” message, which can never result in a suc-
cessful trigger. This is because the trigger command needs some time to travel
from one timing unit via the network link to all others. As a result, the timing
33

4. Performance Analysis
system reports an error including the largest timing difference which corre-
sponds to the largest single trip time in the network. With this procedure, the
delay profile of the network link and the packet loss rate can be determined.
Several packets are sent in one measurement cycle (see Figure 4.5):
1: The PC tells its assigned timing unit (TU1) to immediately start a trigger.
PC and timing unit are directly connected via an Ethernet switch. Due
to this fact, the packet loss rate of this channel is lower than 10−6 and is
therefore set to zero.
pl,1 ≈ 0 (4.1)
2: The first timing unit forwards the trigger information to TU2. This is done
via a lossy channel (e.g. directive radio link) and therefore the packet loss
rate pl,2 is larger than zero.
3: Timing unit two reports an error including ∆t, the difference between the
announced trigger time instant and the time the trigger command was re-
ceived.
4: Timing unit one reports the timing difference to the PC.
Repeating this process and storing the results, allows to determine the packet
loss rate of the network link. It can be seen, that a measurement cycle is only
successful, if no packet in the chain (see Figure 4.5, lower part) is lost. A value
for pl,2 can be determined by
(1− Pmeas) = (1− pl,1)2(1− pl,2)2 (4.2)
where Pmeas is the measured error rate. Rearranging Equation (4.2) and in-
cluding Equation (4.1) results in
pl,2 = 1−√
(1− Pmeas) (4.3)
4.2.2 Packet Delay Profile
Not only the packet loss rate of a link is of interest because trigger packets
arriving too late are not useful any more and therefore produce an error. From
the delay measurement discussed in Section 4.2.1, the probability mass function
of the recorded delay values can be generated. In the next step a cumulative
mass function can be plotted which is more intuitive.
34

4. Performance Analysis
1 Pd
11
00
Pd
time time
Figure 4.6: packet delay profile
Figure 4.6 allows to determine the probability that a packet arrived within
a specific time value under the assumption that the packet is not lost. The
longer the available time, the higher the receive probability. The two graphs
in Figure 4.6 are equivalent, one shows the arrive probability and the other
depicts the error probability (packet delay is longer than desired duration).
For further calculations the packet delay error curve is used (right part of
Figure 4.6).
4.2.3 Trigger Process Duration
The result of a trigger process depends on the packets that are involved. For
example, packets can be lost or delayed. Only if all packets arrive within a
given time at their destination and none is lost, a trigger process can be suc-
cessful. As mentioned in the previous chapter, the link between the Matlab
script and its assigned timing unit is assumed to be ideal (both devices are
directly connected to the same network switch, therefore the loss rate will be
close to zero). It is assumed that every packet has the same error probability.
Indeed this is not true, because the error probability depends on the link. Sev-
eral different links can be used for interconnecting timing units. But assuming
the worst error rate to be present at all interconnects will deliver an upper
bound on the trigger process duration.
The number of packets involved in a trigger process can be calculated as follows
M active units send a trigger timestamp packet to all other (N − 1) units:
M(N− 1)
M active units have to receive a success message from all other units:
M(N− 1).
This leads to the equation
Np = 2M(N − 1) (4.4)
35

4. Performance Analysis
where M is the number of active timing units, N is the total number of units
and Np denotes the number of packets involved in one trigger process.
Successful Trigger Process A trigger process is only successful if:
No packet is lost ( p = (1− pl,2)Np),
all timestamp packets arrive within the trigger time
(p = (1− Pd(ttrig))Np2 ) and
all success messages arrive before the timeout occurs
(p = (1− Pd(ttimeout − ttrig))Np2 ).
The probability for a successful trigger event is therefore given by
psuccess = (1− pl,2)Np · (1− Pd(ttrig))Np2 · (1− Pd(ttimeout − ttrig))
Np2 . (4.5)
From Figure 4.7 it can be seen, that the average duration of a successful
trigger process is the combination of the execution time of the Matlab script
tM , the trigger time ttrig and the average conversion time ta/d.
tsuccess = tM + ttrig + ta/d (4.6)
signal generation signal transmission
time
triggertrigger ok
signal generation
tM ttrig ta/d
trigger
Figure 4.7: successful trigger process
Trigger Error If no packet is lost, but at least one did not arrive within the
trigger time, than at least one of the involved timing units could not trigger
at the right time instant and reports an error. The controlling Matlab script
receives the error message after a duration that equals approximately the
largest round trip time of the network (2ts). For this case the probability is
ptrigerror = (1− pl,2)Np · (1− (1− Pd(ttrig))Np2 ). (4.7)
The first term in this equation is the probability that no packet of the
trigger process is lost and the second term models the probability that at
36

4. Performance Analysis
least one trigger timestamp packet arrives too late (Np
2packets carry trigger
information, all others are used for status messages). The average duration
(see Figure 4.8) until a new trigger process can be started can be calculated
as
ttrigerror = tM + 2ts + trec. (4.8)
time
signal generation
trigger
signal generation recover
triggertrigger error
tM 2ts ta/d
Figure 4.8: trigger error due to delayed timestamp packet
Errors Caught by Timeout This part covers all the other errors that can oc-
cur. The probability can be calculated by
perror = 1− (psuccess + ptrigerror). (4.9)
The average duration (see Figure 4.9) is
terror = tM + ttimeout + trec. (4.10)
time
signal generationsignal generation recover
trigger
tM ttimeout trec
trigger
Figure 4.9: trigger error due to lost packet
Average Measurement Duration The average measurement duration tmeas
for I trigger processes can be calculated by
Ipsuccesstsuccess + Iptrigerrorttrigerror + Iperrorterror = tmeas. (4.11)
37

4. Performance Analysis
The number of successful trigger processes I is included in this equation by
the term
Ipsuccess = I. (4.12)
By combining the previous two equations, the measurement duration with
respect to the number of successful trigger processes (successful transmitted
data blocks) is calculated:
I
(tsuccess +
ptrigerrorttrigerror + perrorterror
psuccess
)= tmeas. (4.13)
If the duration of the Matlab script and the conversion process is fixed,
then the overall measurement duration is only influenced by the trigger
time ttrig, the timeout duration ttimeout and the characteristic of the link.
For determining the optimum trigger time, the number of parameters is
furthermore reduced by setting the timeout duration such that 99.999 % of
all packets arrive within this time.
Equation (4.13) can be rearranged to describe the number of trigger pro-
cesses per second (trigger rate)
1(tsuccess +
ptrigerrorttrigerror+perrorterror
psuccess
) =I
tmeas
(4.14)
Maximization of Equation (4.14) leads to an optimum value of ttrig (the same
result is achieved by minimizing Equation (4.13), but for the maximization
the cost function is bounded).
4.2.4 Optimum Trigger Time
For the calculation of the optimum trigger time, two Matlab scripts are nec-
essary. Both can be found on the attached CD1. The first program generates,
by the help of two timing units, a characteristic delay profile of a given net-
work link. Also the packet loss rate is recorded. The resulting workspace, that
contains all results, is stored to a hard disk. The next step is to specify all
necessary parameters in the second program and supply the path to the result
file. This program then calculates the optimum trigger time for the given link
1 Disk:\02 Data\05 Matlab\02 Optimum Trigger Time\
38

4. Performance Analysis
timing units involved 3active units 2
tM 45 msta/d 1 mstrec 10 ms
Table 4.1: example timing system parameters
and furthermore proposes a timeout duration. Also, the minimum achievable
trigger rate is calculated.
Example
Three timing units have to synchronize a system of converter boards using the
parameters listed in Table 4.1. The network link is done by two Linksys routers
in bridge mode. This is a low quality link, but the results of optimization can be
seen more clearly than with high end links. The link characteristic, including
delay profile and packet loss rate, has already been recorded as described above
and is loaded from the evaluation script. The script outputs an optimum
trigger delay value of 4.31 ms, which corresponds to 106 timer ticks. This is
the optimum value to be inserted into the ”trigger in x” function. Furthermore
a timeout duration of 10.73 ms is proposed.
Detailed information is shown in two graphs. Figure 4.10 shows the character-
istic delay profile of this setup and the vertical line marks the optimum value
of the trigger time. Figure 4.11 shows the achievable frame rate, corresponding
to three timing units and the parameters defined in Table 4.1. The highest
point in this curve is the optimum one, generating the minimum measurement
duration.
4.3 Link Timing Comparison
The Matlab program from the previous chapter can be used to determine the
optimum trigger duration for a given measurement setup. Three interconnects
have therefore been analyzed:
an optical fiber link
a directive radio link
and a WLAN link.
39

4. Performance Analysis
0 1 2 3 4 510
10
10
10
10
10
10
-6
-5
-4
-3
-2
-1
0
time/ms
del
ay p
robab
ility
Figure 4.10: delay profile: 802.11g WLAN link
0 20 40 60 80 100 120 140 1600
2
4
6
8
10
12
14
16
18
20
trigger time/ticks
fram
e ra
te /
fra
mes
per
sec
ond
Figure 4.11: achievable frame rate per trigger time
40

4. Performance Analysis
type ttrigger ttimeout packet error rate frame rateoptical fiber link 8 ticks 0.7 ms ≈ 0 21.6 fps
directive radio link 84 ticks 7.9 ms 6.2 10−6 19.7 fpsWLAN: 802.11g 106 ticks 10.7 ms 2.4 10−3 18.7 fpsWLAN: 802.11b 116 ticks 12.4 ms 2.2 10−2 15.2 fps
Table 4.2: results from the link timing analysis for tM = 45 ms
Results for the different links can be seen in Table 4.2. The parameters were
again chosen as in Table 4.1;
Detailed information on the links can be found in the chapters below.
4.3.1 Optical Fiber Connection
0 1 2 3 4 510
10
10
10
10
10
10
-6
-5
-4
-3
-2
-1
0
time/ms
del
ay p
robab
ility
Figure 4.12: delay profile: optical fiber connection
This connection consists of two transceivers, connected by an optical fiber
cable and is best suited for fast measurements because of its low delay and
low packet error rate. Another advantage of this system is that long distances
between two sites are possible. Figure 4.12 illustrates the trigger error profile.
4.3.2 Directive Radio Link
This system is a wireless bridge, that transparently interconnects two LAN
segments. Figure 4.12 shows the delay profile of this link.
41

4. Performance Analysis
0 1 2 3 4 510
10
10
10
10
10
10
-6
-5
-4
-3
-2
-1
0
time/ms
del
ay p
robab
ility
Figure 4.13: delay profile: directive radio link
4.3.3 Low-Cost WLAN Connection
0 1 2 3 4 510
10
10
10
10
10
10
-6
-5
-4
-3
-2
-1
0
time/ms
del
ay p
robab
ility
802.11b
802.11g
Figure 4.14: delay profile: WLAN connection
In comparison to the links discussed before, a low cost connection established
by standard home or office use WLAN routers was characterized. The results
can be seen in Figure 4.14. For measurement setups, which require only low
trigger rates, this is a cheap alternative.
42

4. Performance Analysis
type ttrigger ttimeout packet error rate frame rateoptical fiber link 6 ticks 0.7 ms ≈ 0 233.1 fps
directive radio link 84 ticks 7.9 ms 6.2 10−6 112.9 fpsWLAN: 802.11g 97 ticks 10.4 ms 2.4 10−3 98.5 fpsWLAN: 802.11b 115 ticks 12.4 ms 2.2 10−2 64.8 fps
Table 4.3: results from the link timing analysis for tM = 3 ms
4.4 Discussion of the Results
Table 4.2 shows the results from the link timing analysis for an average Matlab
duration tM of 45 ms. This value is realistic, if data processing is necessary
between two consequent transmissions (trigger processes). In this case the
Matlab duration is much larger than the trigger time ttrigger and therefore the
frame rate is mainly determined by 1/tM = 22.2 fps.
If the data to transmit is precalculated and only has to be loaded to the
transmit buffer of the D/A converter board, then the Matlab duration tM
decreases to roughly 3 ms (for ta/d = 1 ms, 4 channels with 200 Msamples/s,
2 bytes per sample) which is in the range of the trigger time ttrigger. In this case
the performance spread between the different network links is huge (compare
Table 4.2 Table 4.3).
43

5. Conclusion
5 Conclusion
In this thesis, a system was developed that allows synchronization of several
sites of a telecommunication rapid prototyping system. A 50 Ω output available
at the so called ”timing unit” was used to trigger the A/D and D/A converter
boards. The synchronous trigger pulses were generated by a distributed system
consisting of several timing units. Each unit is mainly a CPLD in combination
with a 32-bit ARM microcontroller. All time critical parts of the system were
implemented in the CPLD whereas the microcontroller was responsible for
communication issues. A flexible interface for controlling the timing system,
via UDP messages, was introduced as well as a set of MEX functions for easy
integration of the system into existing Matlab codes. Finally, the performance
of the designed system was analyzed by testing it under real world conditions.
The measurement results perfectly match the predicted behavior of the system
and it is therefore well suited for high precision synchronization problems.
44

Bibliography
Bibliography
[1] V. Jungnickel, T. Wirth, M. Schellmann, T. Haustein, and W. Zirwas, “Synchronization
of cooperative base stations,” in Wireless Communication Systems. 2008.ISWCS ’08. IEEE International Symposium on, pp. 329 –334, oct. 2008, doi:10.1109/ISWCS.2008.4726071.
[2] Keil, “Mcb2300 evaluation board,” 2008.http://www.keil.com/mcb2300/
[3] NXP, “An10799 - uip webserver source code,” 2008.http://www.nxp.com/documents/other/uip webserver src.zip
[4] NXP, “Porting uip1.0 to lpc23xx/24xx,” 2009.http://www.nxp.com/documents/application note/AN10799.pdf
[5] S. Donnelly, “Endance dag time-stamping whitepaper,” White paper, EndanceTechnology Ltd., 2006, available online (8 pages).http://www.endace.com
[6] S. Caban, “Development and setting up of a 4x4 real-time mimo testbed,” Institutfur Nachrichtentechnik und Hochfrequenztechnik, 2005.http://publik.tuwien.ac.at/files/pub-et 9754.pdf
45











![Ethernet QoS, Timing, and Synchronization Requirements · Ethernet QoS, Timing, and Synchronization Requirements Geoffrey M. Garner SAIT / SAMSUNG Electronics ... WCDMA FDD [5] WCDMA](https://img.dokumen.tips/doc/110x75/5e9fadd64cf17269197f5528/ethernet-qos-timing-and-synchronization-requirements-ethernet-qos-timing-and.jpg)

















