Embed Size (px)
Citation preview

Carrier and Timing Synchronization in
Digital Modems
fred harris
Synchronization-3
Carrier Phase Lock
21-21 June, 2018

Locking to Carrier of Modulated Signal
with Suppressed Carrier
2

How Can One Lock to a Carrier
That’s Not There?
f
f
f
f
f
f
Phase
Jump
Non
Linearity
Forms Line
Frequency
Jump
3
0
0
0 0 0
( ) ( ) ( )
( ) exp( ( ))
( ) [ ( ) ( )] exp( )
( ) exp( ( )) exp( )
( ) ( ) exp( ( )) ( ) exp( ( )) exp( ) exp( ( ))ˆ
( ) exp( ( )) exp( )
ˆ ( ) [ ( )]
[ (
m t x t j y t
R t j t
s t x t j y t j t
R t j t j t
v t s t j t R t j t j t j t
R t j t j
m t slice v t
slice R
*
) exp( ( )) exp( )]
ˆ ˆ( ) exp( ( ))
ˆ ˆˆ( ) ( ) ( ) exp( ( )) exp( ) ( ) exp( ( ))
ˆ ˆ( ) ( ) exp( ( ( ) ( ))) exp( )
ˆ ˆ( ) ( ) exp( )exp( ) ( ) ( ) exp( ( ))
t j t j
R t j t
v t m t R t j t j R t j t
R t R t j t t j
R t R t j j R t R t j
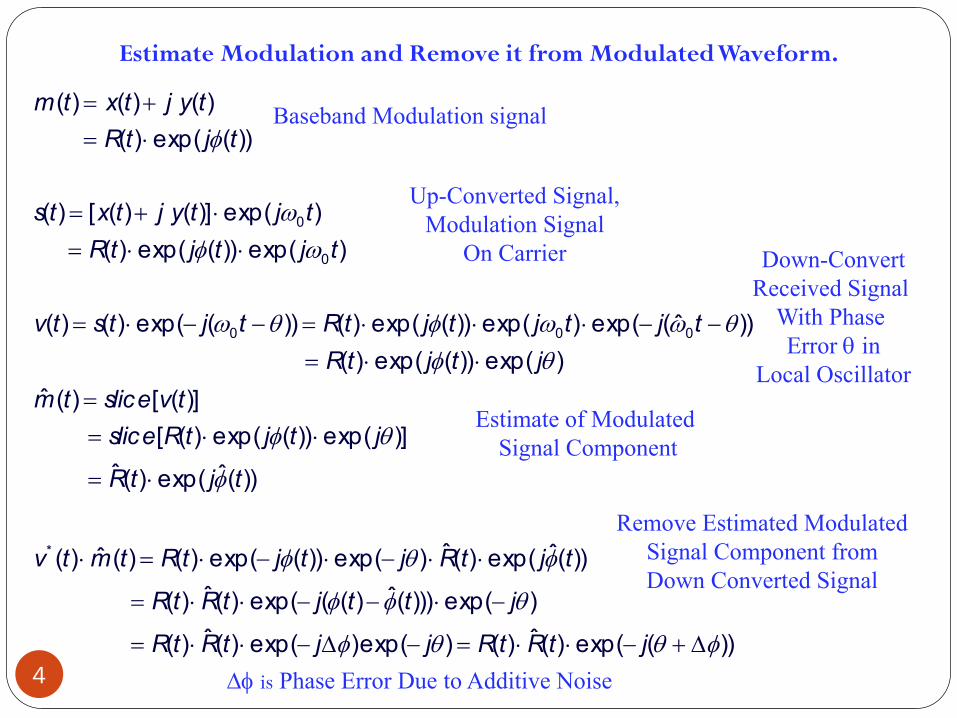
Estimate Modulation and Remove it from Modulated Waveform.
Up-Converted Signal,
Modulation Signal
On Carrier Down-Convert
Received Signal
With Phase
Error in
Local Oscillator
Estimate of Modulated
Signal Component
Remove Estimated Modulated
Signal Component from
Down Converted Signal
is Phase Error Due to Additive Noise
Baseband Modulation signal
4

Computation Are Performed in
Cartesian Coordinates not Polar Coordinates
*
1 1 2 2
1 2 1 2
1 2
1 2
1 2
*
ˆ ˆˆ( ) ( ) ( ) exp( ( )) exp( ) ( ) exp( ( ))
exp( ) exp( ) exp( )
exp( ( )) exp( )
exp( ) exp( )
exp( ( ))
[cos( ) sin( )]
ˆ( )
v t m t R t j t j R t j t
R j j R j
R R j j
R R j j
R R j
R R j
v t
1 1 2 2
1 1 2 2
1 2 1 2 1 2 2 1
1 2 2 1 1 2
( ) [ ( ) ( )] [ ( ) ( )]
[ ] [ ]
[ ] [ ]
[ ] sin( )
m t x t j y t x t j y t
x j y x j y
x x y y j x y x y
x y x y R R
is Phase Error
Due to Additive Noise
5

Phase Measurement with Modulated Signal
r(n) s(n)
s(n)
*
d(n)
Slicer ^
s(n) e j
r(n)= s(n) e + N(n)j
Noise
cloud
N(n)
Constellation
Points
Decision
Boundaries
Rotated
Data
Noise
Cloud
6

Decision Aided Acquisition
r(n)r(n) e
s(n)
*
d(n)
(n)
Detector
(Slicer)Matched
Filter
Equalizer
Filter
DDS Loop
Filter ATAN
^
Noise
Cloud
Angle Variance
Due to Noise Cloud
for Large SignalAngle Variance
Due to Noise Cloud
for Small Signal
SNR
j (n)
-j (n)e
^
7

Decision Aided Acquisition
r(n)r(n) e
s(n)
*
d(n)
(n)
Detector
(Slicer)Matched
Filter
Equalizer
Filter
DDS Loop
Filter ATAN
^
Noise
Cloud
Angle Variance
Due to Noise Cloud
for Large SignalAngle Variance
Due to Noise Cloud
for Small Signal
SNR
j (n)
-j (n)e
^
Phase Detector, Estimates Modulation and Removes it
Water Pistol Cleverly Disguised as a PLL Phase Detector8

BPSK Phase Error
x
y
A exp(j )
A cos( )
A sin( )
2
2
( )* ( ) cos( )*sin( )
sin(2 )2
x n y n A
A
Consider x(n) y(n)
9

x
y
A exp(j )
A cos( )
A sin( )
BPSK Phase Error
2
2
( )* ( ) cos( )*sin( )
sin(2 )2
x n y n A
A
Option 1: x(n) y(n)
Down Converted
Modulation Component
With Carrier Phase Error
BPSK Slicer
Output.
Estimate of
Modulation
Component
Phase
Error
1 1 1
2 2
2
1 2 2 1
x + j y Estimated Constellation point = A sgn(x ) = A sgn(cos( ))
x + j y Observed Constellation point = A cos( )+ j A sin( )
[ ] A sgn(cos( )) sin( ) sgn(cos( )) sin( )x y x y A A
Option 2: sgn(x(n)) y(n)
10

I-Q Product Phase Detectors for Modulated BPSK
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-
Inputs to Product Detector
cosine
sgn(cosine)
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-
S-Curve Product Detector sign(x)*y
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-
S-Curve Product detector x*y
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-
Inputs to Product Detector
11 No Multiplies in sgn(x)y

12
I-Q Product Phase Detectors for Modulated BPSK

I-Q Product Phase Detectors for Modulated QPSK
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-
S-Curve Product Phase Detector: sign(x)*y-sign(y)*x
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-
Inputs to Phase Detector
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
y(n)*sign(x(n-1))-x(n)*sign(y(n-1)) and
y(n-1)*sign(x(n))-x(n-1)*sign(y(n))
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
[y(n)*sign(x(n-1))-x(n)*sign(y(n-1))]-
[y(n-1)*sign(x(n))-x(n-1)*sign(y(n))]
Quadricorrelator (Frequency Estimator)
13 No Multiplies in sgn(x)y-sgn(y)x No Multiplies in Frequency Estimator

I-Q Product Phase Detectors for Modulated QPSK
14
3( )
2 [ ( ) ( )] [ ( ) ( )] ( ) ( )
Det
I Q I Q I Q
4( )
sgn( ( )) ( ) sgn( ( )) ( )
Det
I Q Q I

15
( ( )) ( ) ( ( )) ( )
QPSK S-Curves for Range of SNR
Tanh SNR I Q Tanh SNR Q I

Non Data Aided BPSK Low SNR
r(t)
e(t)
Quadrature
VCO
TIME SYNCH
TIME SYNCH
T0
( ) d t
T0
( ) d t
cos( t + )
sin( t + )
0
0
kOutput I
SAMPLE
SAMPLE
LOOP
FILTER
16

Non Data Aided BPSK High SNR
r(t)
e(t)
Quadrature
VCO
SAMPLE
SAMPLE
LOOP
FILTER
SIGN
TIME SYNCH
TIME SYNCH
T0
( ) d t
T0
( ) d t
cos( t + )
sin( t + )
0
0
kOutput I
17

Costas Loop PLL
r(t)
e(t)
Quadrature
VCO
LOOP
FILTER
T0
( ) d t
T0
( ) d t
cos( t + )
sin( t + )
0
0
Output S(t)
18

Digital PLL for Sinusoid
FIRLPF
r(n)
Sin-Cos
Table
ATAN
FIRLPF
cos( + ) 0
-Sin( + ) 0
^
^
Down
Sample
Z-1
Z-1
Direc t Digital Synthesizer
Loop Filter
kP
KI
x(n)
Y(n)
19
If we replace ATAN
with a product, we have
a Costas Loop!

QPSK PLL
FIRLPF
r(n)
Loop
Filter
FIRLPF
cos( + ) 0
-Sin( + ) 0
^
^
Direc t Digital Synthesizer
x(n) I(n)
y(n)Q(n)
DDS
+
-
^
^
^ ^I(n)y(n)-Q(n)x(n)
~ sin( (n))
^ ^
x(n)+ jy(n)
I(n)+ jQ(n)(n)
20
Loops Differ in
Phase Detectors
That Change
Slicers to Match
Constellation

FIRLPF
r(n)
Loop
Filter
FIRLPF
cos( + ) 0
-Sin( + ) 0
^
^
Direc t Digital Synthesizer
x(n) I(n)
y(n)Q(n)
TrigTable
+
-
^
^
^ ^I(n)y(n)-Q(n)x(n)
~ sin( (n))
Tanh(-)
Tanh(-)
SNR
SNR
QPSK PLL-II
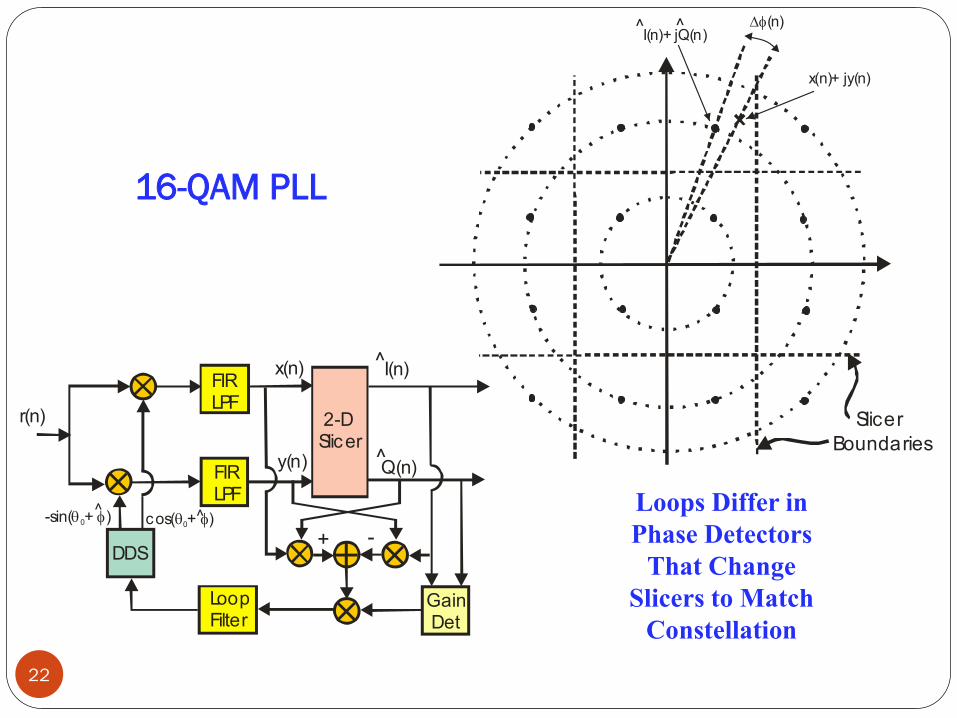
16-QAM PLL
FIRLPF
Gain Det
r(n)
LoopFilter
FIRLPF
2-DSlicer
cos( + ) 0-sin( + ) 0 ^^
x(n) I(n)
y(n) Q(n)
DDS+ -
^
^
^ ^
x(n)+ jy(n)
I(n)+ jQ(n)(n)
Slicer
Boundaries
22
Loops Differ in
Phase Detectors
That Change
Slicers to Match
Constellation





























