Embed Size (px)
DESCRIPTION
Geometrik Dönüşümler. Genel Bakış. 2 ve 3 boyutlu, Çevirim(Translation) Dönüş(Rotation) Ölçeklendirme(Scaling) Homojen koordinatlar Koordinat sistemleri. 2 Boyutlu Konum Değiştirme (Translation). Bir nesneyi bir koordinattan bir diğerine düz bir çizgi boyunca yeniden konumlandırma - PowerPoint PPT Presentation
Citation preview

GeometrikGeometrik
DönüşümlerDönüşümler

Genel Bakış• 2 ve 3 boyutlu,Çevirim(Translation)Dönüş(Rotation)Ölçeklendirme(Scaling)• Homojen koordinatlar• Koordinat sistemleri

2 Boyutlu Konum Değiştirme (Translation)
• Bir nesneyi bir koordinattan bir diğerine düz bir çizgi boyunca yeniden konumlandırma
• Orijinal koordinat pozisyonuna tx ve ty, çevirim mesafelerini ekleme
• Konum değiştirme katılarda, Nesneyi bozmadan hareket ettirir.

2 Boyutlu Dönüş (Rotation)
Orijin etrafında dönüş:……..• Orijinal kutup koordinatları:……..• Yerlerine yerleştirdikten sonra:……..• Matris yapısı:………• Pozitif dönüş açıları saat yönünün tersini gösterirken,
negatif açılar saat yönünü gösterir.

2 Boyutlu DönüşRastgele bir nokta etrafında
dönüş:………
• Önce translation(xr,yr) ve yerlerine koymadan sonra dönüş:……..

2 Boyutlu Dönüş• Dönüşlerde işlem sırası önemlidir. Sonuç imge farklı
olabilmektedir. Aşağıdaki örnekte olduğu gibi...

2 Boyutlu Dönüş
• Bir doğru, doğrunun bitiş noktalarına dönüş denklemi uygulanarak döndürülür ve yeni bitiş noktaları arasına yeniden çizilir.
• Çokgenler her tepe noktasını belirlenen dönüş açısıyla döndürülürler ve daha sonra yeniden çizerler.
• Eğriler tanımlama noktalarının yeniden konumlandırılması ve eğrinin yeniden çizilmesiyle döndürülür.

2 Boyutlu Ölçeklendirme
• Nesnenin boyutunu değiştirir• Bir nesne her tepe noktasının (x,y) koordinatlarının
birer ölçekleme katsayısı olan sx ve sy ile çarpılmasıyla ölçeklendirilir.
• Sx ve sy herhangi bir pozitif değer alabilir. 1’den küçük değerler nesnenin boyutunu küçültür. 1’den büyük değerler genişleme sağlarlar Sx ve sy 1 ise, boyut değişmez.

2 Boyutlu Ölçeklendirme
• Tek düze ölçeklendirme: Sx ve sy aynı değerdedirler.• Diferansiyel ölçeklendirme: Sx ve sy eşit değildirler. 1’den küçük ölçekleme değerleri nesneyi orijine yaklaştırır. 1’den büyük ölçekleme değerleri nesneyi orijinden uzaklaştırır.• Sabit nokta: (xf,yf) sabit noktası ölçeklemeden sonra konumu kontrol etmek
içindir. (xf,yf) sabit noktasının koordinatları herhangi bir pozisyonda
olabilir.???? xf(1-sx) ve yf(1-sy) nesnenin tüm noktaları için sabit taşıma
(translation) oluşturur.

Homojen koordinatlar• Soru:Çevirim(Translation) matrisleri
toplama gerektirmesine rağmen, ölçekleme ve dönüş matrisleri çarpım gerektirir. Bunları nasıl birleştiririz?
• Çözüm:Kartezyen koordinatları yerine
homojen koordinatlar kullanılır. Bu koordinat sisteminde çevirim, ölçekleme ve dönüş genel bir matris çarpım yöntemiyle ifade edilebilir.
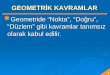
Homojen koordinatlar• 2 boyutlu koordinatta temsil edilen p1(x1,y1) noktasını
bir “h” değişkeni ekleyerek p1h(hx1,hy1,h) olarak gösterilir. h=1 olduğunda (x,y) için kartezyen koordinatlardaki değer elde edilir.
• Homojen koordinatlarda p(m,n,h) ile verilen nokta p(m/h,n/h,1) kullanılarak kartezyen koordinatlardaki değerler bulunabilir.
• Her nokta için aynı doğru üzerinde “h” değerine bağlı olarak birden çok homojen koordinatla gösterilebilir.
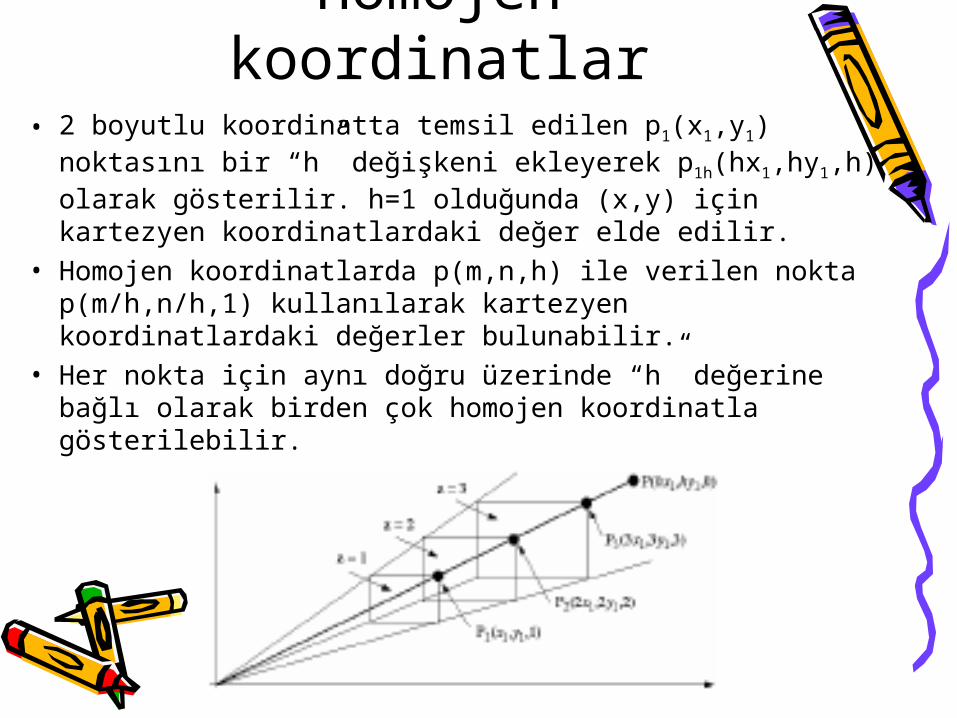
Homojen Koordinatlarda 2 Boyutlu Çevirim
• Matris temsili:…………..Ters çevirim matrisi tx ve ty’yi –tx ve –ty
ile değiştirilerek yapılır. P den P’ ne:
•ve P’ nden P’’ ye çevirim………..

Homojen Koordinatlarda 2 Boyutlu Dönüş
• Matris temsili:…….Ters dönüş matrisi θ’nın –θ’ya
dönüştürülmesi ile gerçekleştirilir. İki başarılı dönüş:………..

Homojen Koordinatlarda 2
Boyutlu Ölçekleme• Matris temsili:……..Ters ölçekleme matrisi sx ve sy’nin 1/sx
ve 1/sy ile değiştirilmesiyle elde edilir. P den P’ ne ve P’ den P’’ ne ölçekleme:
….
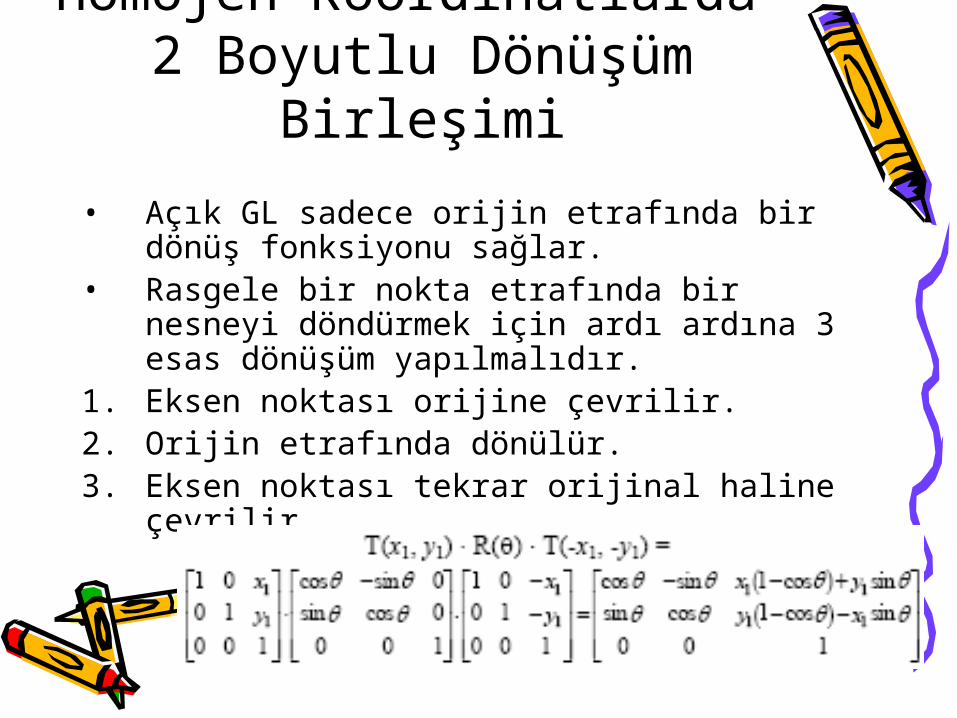
Homojen Koordinatlarda 2 Boyutlu Dönüşüm Birleşimi
• Açık GL sadece orijin etrafında bir dönüş fonksiyonu sağlar.
• Rasgele bir nokta etrafında bir nesneyi döndürmek için ardı ardına 3 esas dönüşüm yapılmalıdır.
1. Eksen noktası orijine çevrilir.2. Orijin etrafında dönülür.3. Eksen noktası tekrar orijinal haline çevrilir.


2 Boyutlu Çevirimin Bileşenleri

DİĞER DÖNÜŞÜM ÇEŞİTLERİ
• Makaslama-Kaykılma(Shear)• Yansıma(Reflection)

Makas(Shear-Kaykılma) Çevirimi
• Bir nesnenin şeklini sanki birbirleri üzerinden kayan iç tabakalardan oluşmuş gibi gösterecek şekilde biçimini bozar
• X-yönünde makas• Y- yönünde makas

Yansıma Çevirimi• Bir nesnenin ayna yansımasını
oluşturur.

Temel Dönüşüm Sınıfları
• 1)Katı kütle(Rigid Body) Çevirim:Uzunluk, açı ve yönelim(orientation) korunur. Örn: Dönüş (Rotation) ve çevirim(Translation)
• 2)Yakın(Affine) Çevirim: Doğruların uzunlukları ve açılarını değil, paralelliklerini korur. Çizgiler çizgi olarak kalır. Örn: Çevirim(translation), Dönüş(rotation), Ölçekleme(scaling), Makaslama(shear), ve Yansıma (reflection)
• 3)(Conformal) Çevirim: Sadece Açı ve yönelimin (orientation) korunduğu çevirim. Orn: Dönüş (Rotation), çevirim(Translation) ve düzenli ölçekleme (uniform scaling).
• Bu özellikler aynı zamanda 3 boyutlularda da geçerlidir.

3 Boyutlu Dönüşümler3 Boyutlu Çevirimler
• 4’e 4’lük homojen bir matris
• Ters çevirim matrisi tx , ty ve tz’yi; –tx ,–ty ve –tz ile değiştirerek elde edilir.
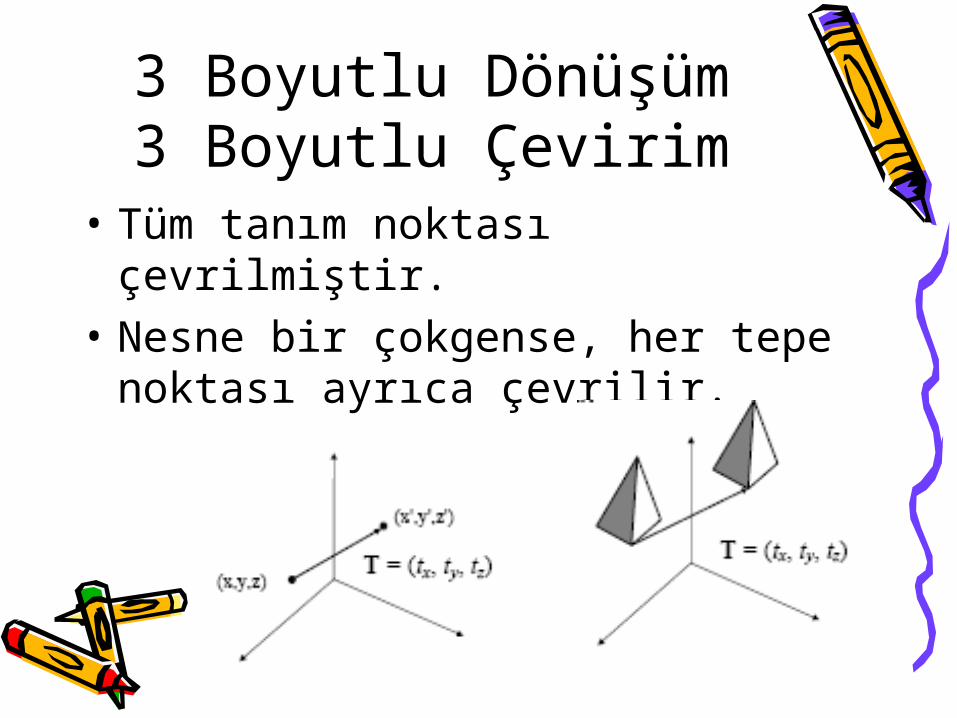
3 Boyutlu Dönüşüm3 Boyutlu Çevirim
• Tüm tanım noktası çevrilmiştir.• Nesne bir çokgense, her tepe
noktası ayrıca çevrilir.

3 Boyutlu Dönüşümler3 Boyutlu Ölçekleme
• 4’e 4’lük bir homojen matris
• Ters ölçekleme matrisi sx, sy ve sz yerine 1/sx, 1/sy ve 1/sz konularak oluşturulur.

3 Boyutlu Dönüşümler3 Boyutlu Ölçekleme
• Sabit bir noktaya göre ölçekleme

3 Boyutlu Dönüşüm3 Boyutlu Dönüş
• z ekseni etrafında dönüş• x ekseni etrafında dönüş• y ekseni etrafında dönüş

3 Boyutlu Dönüşümün Bileşenleri
• İlk hali:…. son hali:……• Dönüşümü başarabilmek için iki yol vardır.1. T, rx,ry, rz dönüşümlerini oluştur.
2. Dikey matrisin özelliklerini kullan

3 Boyutlu Dönüşümün Bileşenleri
• 2 boyutlu bileşenleriyle aynı şekilde yapılır.1. P1’i orijine dönüştür.
2. y ekseni etrafında çevir (p1, p2 (y,z) düzleminde uzanmaktadır.)
3. x ekseni etrafında çevir (p1, p2 z ekseni üzerindedir)
4. z ekseni etrafında çevir (p1, p3(y,z) düzleminde uzanmaktadır)
Bileşik matris aşağıdaki gibidir:……

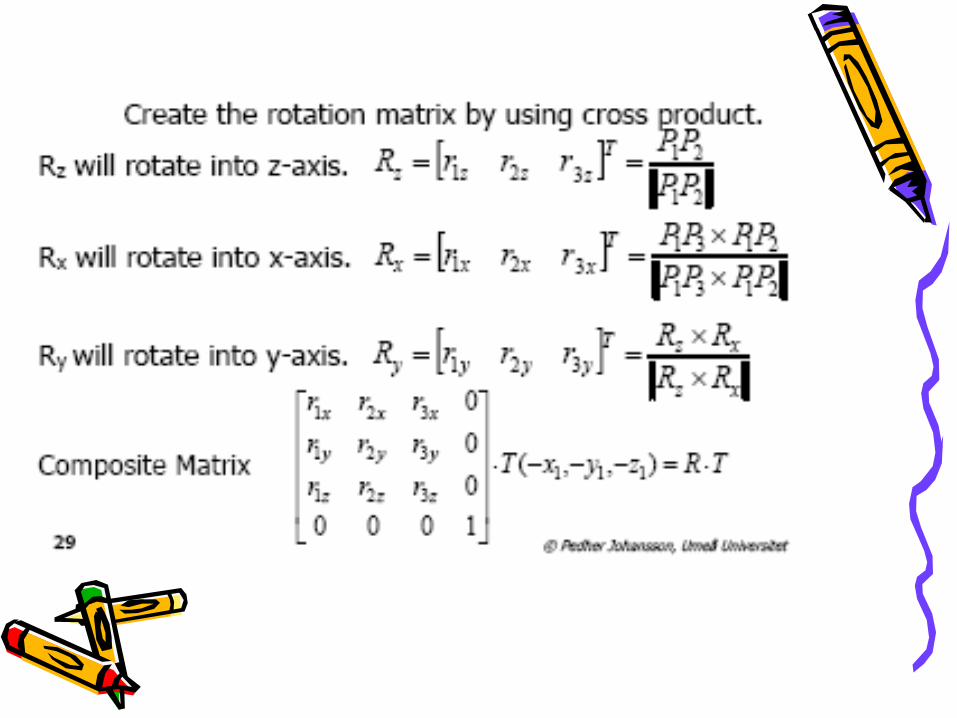
3 Boyutlu Dönüşümün Bileşenleri
• Dönüş matrisini çapraz çarpım kullanarak oluşturunuz
• RZ z eksenine dönecektir
• RX x eksenine dönecektir
• RY y eksenine dönecektir
• Bileşik matris:…