Embed Size (px)
DESCRIPTION
Curs de fizica
Citation preview

1
SELECTIUNI DIN CURSUL DE FIZICA 2.OscilaŃii mecanice
2.1 Cinematica şi dinamica mişcării oscilatorii
În natură şi în tehnică observăm apariŃia unei serii de mişcări în care un punct
material sau un corp îşi schimbă poziŃia alternativ, faŃă de o poziŃie mediană de echilibru. De exemplu, mişcarea unui pendul, mişcarea unei frunze în bătaia vântului, mişcarea particulelor de lichid sub acŃiunea valurilor, mişcarea unei nave pe mare, mişcarea unui piston în cilindrul unei maşini termice, etc. Astfel de mişcări se numesc mişcări oscilatorii. Mişcarea oscilatorie se poate defini ca fiind o mişcare alternativă periodică în timp a unui corp în jurul unei poziŃii de echilibru. În fizică se întâlnesc şi alte fenomene în care un parametru (mărime fizica) suferă o variaŃie periodică în jurul unei valori de echilibru (de exemplu o tensiune alternativă); astfel de fenomene se numesc oscilaŃii şi deşi nu sunt mişcări, legile pe care se vor deduce pentru mişcarea oscilatorie pot fi extinse şi în aceste situaŃii. Dacă parametrul oscilant este de natură mecanică (de exemplu distanŃă, presiune, unghi) se vorbeşte de oscilaŃii mecanice, iar dacă parametrul oscilant este de natură electrică ( de exemplu sarcină electrică, tensiune, intensitate) atunci oscilaŃiile sunt electrice. Parametrul care oscilează îşi schimbă valoarea în funcŃie continuă de timp, şi este o funcŃie în care variabila este timpul, iar valoarea acestei funcŃii la un moment dat se numeşte valoare instantanee sau elongaŃie. Valoarea maximă a parametrului oscilant se numeşte amplitudine. Timpul în care se efectuează o oscilaŃie completă se numeşte perioadă, iar numărul de oscilaŃii efectuate într-o perioadă de timp se numeşte frecvenŃă. Sistemul fizic în care se generează oscilaŃii se numeşte oscilator. În orice proces oscilant are loc transformarea energiei dintr-o formă cinetică într-o formă potenŃială.
2.2 Dinamica mişcării oscilatorii unidimensionale
Se va considera un corp de masa m, care este conectat printr-o legătură elastică ( de exemplu un resort elicoidal ) de masă neglijabilă de un suport rigid şi se găseşte pe o masă orizontală fără frecare statică (µ = 0). În situaŃia în care legătura elastică nu este deformată (când resortul nu este întins sau comprimat), corpul se găseşte în echilibru.(fig.2.1 a)

2
Dacă acest corp este scos din poziŃia de echilibru, până la o distanŃă maximă A, (fig.2.1 b) forŃa elastică va readuce corpul spre poziŃia de echilibru, având loc simultan o transformare a energiei potenŃiale în energie cinetică şi o pierdere de energie prin interacŃiunea sistemului cu mediul exterior (fig.2.1c ). La revenirea în poziŃia de echilibru, energia potenŃială pe care a avut-o resortul când era întins, s-a transformat parŃial în energie cinetică şi deci, în această poziŃie forŃa elastică este nulă. Datorită inerŃiei corpul îşi continuă drumul până la o poziŃie extremă, comprimând resortul până la A′− (fig.2.1d) după care fenomenul continuă în sens invers. Deci are loc o mişcare
alternativă a sistemului în jurul poziŃiei de echilibru, adică o oscilaŃie în cursul căreia sistemul îşi pierde energia pe care a acumulat-o iniŃial, prin interacŃiune cu mediul exterior. Se va considera că reacŃiunea dată de arc se opune deformării acestuia şi este proporŃională şi de sens contrar elongaŃiei (depărtării de poziŃia de echilibru). Sistemele elastice care au reacŃiunea proporŃională cu depărtarea de la poziŃia de echilibru sunt numite sisteme elastice liniare, iar oscilaŃiile produse de astfel de forŃe sunt numite oscilaŃii liniare. Dacă aceste forŃe sunt dependente de deformaŃia ridicată la o oarecare putere, sisteme elastice sunt neliniare, iar oscilaŃiile produse de ele sunt oscilaŃii neliniare.
ForŃe cu comportament de forŃă elastică apar şi în alte situaŃii (nu apar numai în cadrul elasticităŃii) şi se numesc forŃe de revenire sau forŃe cvasielastice, constanta k numindu-se constantă cvasielastică şi depinzând de caracteristicile sistemului.
Se vor considera sisteme oscilante care au dimensiuni suficient de reduse şi vitezele mici, iar din acest motiv, forŃele de rezistenŃă din partea mediului vor fi de tipul frecării vâscoase, unde forŃa de frecare depinde de puterea întâi a vitezei. ForŃele de rezistenŃă de acest tip se mai numesc şi forŃe Stokes, şi pentru un corp sferic se exprimă prin relaŃia, următoare
vrFr
rrπη−= 6 (2.1)
η reprezintă vâscozitatea dinamică a mediului, r raza sferei şi v viteza
cunoscând definiŃia vitezei xdt
xdv &r
rr
== , pentru un corp de forma oarecare expresia
acestei forŃe are forma

3
Figura 2.1
xFr&r
rρ−= sau
dt
xdFr
rr
ρ−= (2.2)
unde ρ se numeşte coeficient de rezistenŃă si depinde de vâscozitatea dinamică a mediului şi de geometria corpului. Rezultanta forŃelor care acŃionează asupra corpului va fi: vkxF ρ−−= (2.3) Dar conform principiului al II-lea al lui Newton

4
xmdt
xdm
dt
dvmmaF &&====
2
2
(2.4)
deci:
vkxdt
xdm ρ−−=
2
2
sau, 02
2
=+ρ+ kxdt
dx
dt
xdm (2.5)
Aceasta este o ecuaŃie diferenŃială de ordinul II cu coeficienŃi constanŃi care se mai poate pune şi sub următoarea formă:
02
2
=+ρ
+ xm
k
dt
dx
mdt
xd (2.6)
Se fac notaŃiile δ=ρ
2m
şi 20ω=
m
k (2.7)
δ se numeşte factor de amortizare ,iar 0ω pulsaŃie proprie
ecuaŃia devenind astfel:
02 202
2
=ω+δ+dt
dx
dt
xd (2.8)
În teoria ecuaŃiilor diferenŃiale se arată că soluŃia unei astfel de ecuaŃii este de
forma:
( ) ∑=
λ⋅=n
i
t
iiectx
1
(2.9)
ic sunt constante care trebuie determinate prin condiŃiile iniŃiale, iar iλ sunt soluŃiile ecuaŃiei algebrice ataşate ecuaŃiei, de forma: (ecuaŃia caracteristică) 02 2
02 =ω+δλ+λ (2.10)
SoluŃiile ecuaŃiei caracteristice vor fi:
20
22,1 ω−δ±δ−=λ (2.11)
Aceste soluŃii pot fi complexe sau reale după cum acŃiunea forŃelor rezistente este
mai mare sau mai mică decât acŃiunea forŃei elastice. În cazul când forŃele rezistente sunt mici 0δ ω< .In acest caz rezistenŃa opusă
procesului oscilator este atât de mică încât el se poate desfăşura în voie, instaurându-se un regim numit regim periodic. Rădăcinile ecuaŃiei caracteristice sunt.
2 21,2 0iλ δ ω δ= − ± − (2.12)

5
şi soluŃia ecuaŃiei diferenŃiale se va prezenta în felul următor:
( ) ( ) ( )
( ) ( )
2 2 2 20 0
2 2 2 20 0
1 2
1 2
i t i t
i t i tt
x t c e c e
x t e c e c e
δ ω δ δ ω δ
ω δ ω δδ
− + − − − −
− − −−
= +
= + (2.13)
Se face notaŃia : 220 δ−ω=ω (2.14)
Această mărime se numeşte pseudopulsaŃie şi ecuaŃia devine: ( ) ( )titit ececetx ω−ωδ− += 21 (2.15) Înlocuind în relaŃia (2.15) formule lui Euler α⋅±α=α± sincos ie i va rezulta expresia următoare: ( ) ( ) ( )[ ]titctitcetx t ω⋅−ω+ω⋅+ω= δ− sincossincos 21 sau, ( ) ( ) ( )[ ]tccitccetx t ω−+ω+= δ− sincos 2121 (2.16) Se dă factor comun forŃat ( )21 cc + :
( ) ( ) ( )( )
ω
+
−+ω+= δ− t
cc
ccitccetx t sincos
21
2121
Şi se notează: ( )( )21
21
cc
ccitg
+
−=ϕ , constanta ϕ va fi denumită fază iniŃială
( ) ( )[ ]
( ) ( )ϕ
ω⋅ϕ+ϕω+=
ωϕ+ω+=
δ−
δ−
cos
sinsincoscos
sincos
21
21
ttccetx
ttgtccetx
t
t
cosφ se poate exprima în funcŃie de tgφ prin relaŃia cunoscută din trigonometrie:
ϕ+
=ϕ21
1cos
tg sau,
( )( )221
2211
1cos
cc
cc
+
−−
=ϕ
21
21
2221
21
2221
21
21
222cos
cc
cc
cccccccc
cc +=
−+−++
+=ϕ (2.17)
deci x(t) va avea următoarea formă:
( ) ( )α−ω= δ− tecctx t cos2 21 (2.18)

6
Se observă că valoarea maximă a lui x(t) scade exponenŃial cu timpul. Se mai fac următoarele notaŃii:
Α=212 cc şi ( ) 1 22 t tt c c e Aeδ δ− −Α = =
cu aceste notaŃii, ecuaŃia mişcării este.
( ) ( )costx t e tδ ω ϕ−= Α + (2.19)
( ) tA t e δ−= Α este amplitudinea momentană şi se constată că ea este descrescătoare în
timp.Graficul dependenŃei elongaŃiei de timp a unei oscilaŃii amortizate de ecuaŃie
( ) 0,610 cos10tx t e t−= este reprezentată în figura 2.2a
Figura. 2.2a
şi graficul elongaŃiei oscilaŃiei amortizate de ecuaŃie ( ) )(0,35 cos 10 5tx t e t−= −
este reprezentată în figura 2.2b
Figura 2.2b

7
Curbele reprezentate prin linie întreruptă reprezintă curbele de amortizare adică
graficul amplitudinii momentane ( ) 0,610 tA t e−= în primul caz şi ( ) 0,35 tA t e−=
Se remarcă faptul că o valoare mărită a factorului de amortizare duce la o diminuare mai rapidă a amplitudinii.
O astfel de mişcare se numeşte mişcare oscilatorie armonizată. Datorită pierderii de energie din sistem, amplitudinea scade. Se observă că amplitudinea A(t) este exponenŃial scăzătoare în timp, amortizarea oscilaŃiei depinzând de factorul de amortizare δ.
Pentru a caracteriza modul în care se amortizează o oscilaŃie se utilizează decrementul logaritmic definit ca fiind logaritmul natural al raportului valorilor elongaŃiilor maxime succesive de aceeaşi parte a poziŃiei de echilibru.
( )
( )Tt
t
+ΑΑ
=∆ ln (2.20)
Înlocuind amplitudinea în (2.20) ( ) tA t Ae δ−=
( ) Τ⋅δ==ΑΑ
=∆Τδ−+δ−
δ−
ee
eTt
t 1lnln (2.21)
T este pseudoperioada definită prin relaŃia
22
0
22
δ−ω
π=
ωπ
=Τ (2.22)
dacă timpul scurs de la momentul iniŃial este δ
=τ=1
t ,
( )e
eΑ
=Α=τΑ −1 (2.23)
deci δ
=τ1 este timpul în care amplitudinea scade de „e” ori şi se numeşte timp de
relaxare. În cazul în care, 0ω>δ , rezistenŃa opusă de mediu procesului este atât de mare
încât energia acumulată iniŃial în sistem se disipă în mare parte în prima pseudoperioadă. În acest caz regimul periodic nu se mai poate instala, dar se instalează în schimb un regim aperiodic. SoluŃia ecuaŃiei caracteristice in acest caz va fi:
20
22,1 ω−δ±δ−=λ dacă se notează : 2
02 ω−δ=q
rădăcinile ecuaŃiei caracteristice sunt următoarele: q±δ−=λ 2,1 (2.24)
Rezultă că valoarea instantanee a distanŃei este :

8
( ) ( )qtqtt ececetx −δ− += 21 (2.25)
Dacă se introduc funcŃiile: 2
xx eeshx
−−= şi
2
xx eechx
−+= între care există
relaŃia : shxchxe x ±=± ,se observă că relaŃia (2.25) se poate transcrie astfel:
( ) ( ) ( )1 2 1 2tx t e c c chqt c c shqtδ− = + + − (2.26)
Dacă în momentul iniŃial t=0 distanŃa de la sistemul de referinŃă ales este X0 iar viteza are valoarea V0 , după determinarea constantelor 1 2c sic din aceste condiŃii ecuaŃia (2.26) va
lua următoarea formă:
( ) 0 00
t V Xx t e X chqt shqt
q
δ δ− += +
(2.27)
Se observă că ecuaŃia de mişcare nu mai prezintă periodicitate, deci nu mai au loc
oscilaŃii, mişcarea amortizându-se. Modul cum are loc amortizarea depinde de viteza iniŃială imprimată sistemului. În figura 2.3 este reprezentat modul de variaŃie a funcŃiei x(t) pentru o mişcare
aperiodică având următorii parametrii: 0 5X cm= ; 10,9sδ −= ; 0 0,7rad
sω = ; 0 7T s≈ ;
10,55q s−= . Linia întreagă reprezintă mişcarea pentru 0 0V = ; linia întreruptă
pentru 0 10 /V cm s= şi linia punctată pentru valoarea vitezei iniŃiale, 0 20 /V cm s= −
Figura. 2.3
Cunoaşterea modului de amortizare este important în tehnica pentru construirea amortizoarelor de oscilaŃii ale diferitelor instalaŃii.

9
Un caz particular foarte important al mişcării oscilatorii este cazul când nu există forŃă de rezistenŃă (caz ideal). O asemenea mişcare se numeşte mişcare oscilatorie armonică. Dacă δ = 0 ecuaŃia mişcării devine: ( ) ( )00cos ϕ+ωΑ= ttx (2.28)
Mobilul oscilează între două distanŃe extreme A şi –A în jurul poziŃiei de
echilibru, amplitudinea rămânând constantă. Are loc o transformare a energiei cinetice în energie potenŃială şi invers, dar energia totală se conservă .
2.3 Energia oscilatorului în mişcarea oscilatorie armonică În această mişcare oscilatorul are în fiecare moment o energie cinetică şi o energie potenŃială datorată forŃei elastice (la extreme 0=ΕC
, iar în poziŃia de echilibru 0=ΕΡ ).
Energia cinetică va fi 2
2vmC
⋅=Ε , iar energia potenŃială elastică
2
2xk ⋅=ΕΡ .
Energia totală a oscilatorului armonic va fi:
22
22 kxmvC +=Ε+Ε=Ε Ρ (2.29)
valoarea instantanee a vitezei este:
( ) ( ) ( )00000 sin
cosϕ+ωΑω−=
ϕ+ωΑ== t
dt
tdtxv (2.30)
deci energia totală devine:
( ) ( )
2
cos
2
sin 0022
00222
0 ϕ+ωΑ+
ϕ+ωΑω=Ε
tktm (2.31)
dar , pulsaŃia proprie este
20
20 ω=⇒=ω mk
m
k
înlocuind în formula energiei totale, se va obŃine:
( ) ( )
2
cossin 00222
000222
0 ϕ+ωΑω+ϕ+ωΑω=Ε
tmtm (2.32)
deci energia totală devine:
2
220Αω
=Εm
(2.33)
Este evident că în lipsa interacŃiunilor oscilatorului cu mediul, conform principiului conservării energiei, energia acestuia are valoare constantă.

10
Dacă se reprezintă grafic energia potenŃială în funcŃie de elongaŃie conform
relaŃiei: 2
220xmω
=ΕΡ se va obŃine o parabolă, la care fiecare ordonată reprezintă energia
potenŃială, iar prelungirea sa (punctată) reprezintă energia sa cinetică Ε=Ε+ΕΡ C fiind
constantă (figura 2.4).
Figura 2.4
2.4 BilanŃul energetic în mişcarea oscilatorie amortizată În mişcarea oscilatorie amortizată sistemul oscilant (oscilatorul) fiind în interacŃiune cu mediul, va ceda acestuia energie: acest proces este numit disiparea energiei. Pentru a găsi modul în care se disipă energia se va pleca de la ecuaŃia diferenŃială a mişcării în forma originală, dată de (2.5) înmulŃită cu viteza dtdxv = :
( )2
20
d x dx dxm kx
dt dt dtρ+ + = (2.34)
02
2
=+
ρ+dt
dxkx
dt
dx
dt
xd
dt
dxm (2.35)
Se observă prin verificare directă că sunt satisfăcute relaŃiile:
⋅=⋅2
2
2
2
1
dt
dx
dt
d
dt
xd
dt
dx şi ( )2
2x
dt
dk
dt
dxkx ⋅=⋅
deci relaŃia (2.35) se transformă în felul următor:
( ) 022
222
=⋅+
ρ+
⋅ xdt
dk
dt
dx
dt
dx
dt
dm (2.35)
Dar m/2 şi k/2 sunt constante, deci pot fi introduse în derivate.

11
022
222
=
+
ρ+
kx
dt
d
dt
dx
dt
dxm
dt
d (2.36)
Sau,
222
22v
kxmv
dt
dρ−=
+ (2.37)
dar vdt
dx= , deci mărimea din paranteză
Ε=+22
22 kxmv (2.38)
reprezintă energia totală a sistemului oscilant şi prin urmare:
2vdt
dρ−=
Ε (2.39)
Se observă că 2 0v > prin urmare, 0<Εdt
d
Dacă derivata unei funcŃii este negativă, atunci funcŃia este descrescătoare, deci energia sistemului scade. Maximul de scădere adică maximul puterii disipate este în momentul când v este maxim.
Φ=Ε
⋅dt
d
2
1 (2.40)
se numeşte funcŃie de disipaŃie a sistemului, şi caracterizează modul în care sistemul cedează energie mediului.
2.5 Mişcarea oscilatorie întreŃinută Studiind mişcarea oscilatorie amortizată, am constatat că sistemul oscilant pierde în mod continuu energie. În multe situaŃii din tehnică, este necesar să se menŃină amplitudinea unei oscilaŃii constantă. În acest caz sistemul oscilant (oscilatorul) să primească de la o sursă de exterioară o energie care să compenseze pierderile sistemului. O astfel de situaŃie se întâmplă la ceasurile mecanice unde oscilaŃia pendulului sau a balansierului este menŃinută cu amplitudine constantă cu ajutorul mecanismului ancoră-clinchet, pierderile de energie fiind compensate de energia potenŃială acumulată în sistemul de greutăŃi sau într-un resort spiral. Sursa de energie transmite sistemului oscilant o energie numită energie aparentă. Din aceasta, o parte numită energie reactivă este redată sursei şi o altă

12
parte numită energie activă este folosită pentru învingerea rezistenŃelor şi este disipată în mediu sub formă de căldură. Seva analiza în continuare un model matematic simplu construit pentru un oscilator mecanic amortizat pus în contact cu o sursă de energie care-i furnizează energie aparentă prin intermediul unei forŃe care are caracter de oscilaŃie armonică Deci pe lângă
forŃa elastică (-kx) şi forŃa de frecare vâscoasă
ρ−dt
dx mai acŃionează o perturbaŃie
externă care variază armonic în funcŃie de timp ,având pulsaŃia Ω, de forma : ( ) cosf t F t= Ω
dacă se aplică principiul al doilea a lui Newton, ecuaŃia diferenŃială a mişcării este următoarea:
2
2cos
d x dxm kx F t
dt dtρ+ + = Ω (2.41)
Această, ecuaŃie este o ecuaŃie neomogenă a cărei soluŃie este formată dintr-o
sumă, dintre soluŃia ecuaŃiei omogene şi o soluŃie particulară, pe care o vom alege de forma termenului liber, adică de forma unei oscilaŃii armonice de amplitudine B şi de fază iniŃială Φ. SoluŃia ecuaŃiei omogene (fără membrul drept), este soluŃia ecuaŃiei oscilatorului amortizat, soluŃie care a fost deja studiată . Din punct de vedere fizic soluŃia ecuaŃiei (2.41) reprezintă suprapunerea unei oscilaŃii amortizate descrisă de primul termen al membrului drept al ecuaŃiei şi a unei oscilaŃii armonice de amplitudine B constantă, descrisă de cel de-al doilea termen Deci: ( ) ( ) ( )txtxtx 21 += (2.42)
Pentru ( )tx1 : ( ) ( )ϕ+ωΑ= δ− tetx t cos1 în care se ştie că: 220 δ−ω=ω
reprezintă pseudopulsaŃia. Pentru ( )tx2 : ştiind că ( ) cosF t F t= Ω ,soluŃia particulară ( )tx2 se va căuta sub
aceeaşi formă armonica. ( ) ( )2 1cosx t tω= Β +Φ (2.43)
(O forŃa externă oscilatorie provoacă tot o oscilaŃie de amplitudine B şi fază iniŃială 1ϕ ) SoluŃia ecuaŃiei diferenŃiale (2.41)va fi: ( ) ( ) ( )1 cos costx t e t tδ ω ϕ−= Α + +Β Ω +Φ (2.44)
Regimul în care coexistă ambele oscilaŃii se numeşte regim tranzitoriu

13
După un timp suficient de lung t >> τ ,numit timp de relaxare, primul termen devine neglijabil căci 0→δ− te şi în soluŃia ecuaŃiei de mişcare nu rămâne decât ( )tx2 care va
trebui să satisfacă ecuaŃia originală. Pentru aceasta se vor calcul dt
dx2 şi 22
2
dt
xd
şi vor fi introduse în ecuaŃia originală. Astfel:
( )
( )
2
222
2
sin
cos
dxt
dt
d xt
dt
= −ΩΒ Ω +Φ
= −Ω Β Ω +Φ
(2.45)
Introducând relaŃiile (2.45) în ecuaŃia (2.41) se va obŃine expresia:
( ) ( ) ( )2 cos sin cos cosm t t k t F tρ− Ω Β Ω +Φ − ΩΒ Ω +Φ + Β Ω +Φ = Ω (2.46)
Pentru a simplifica calculele se va face următorul artificiu scriind
( )cos cosF t F t Ω = Ω +Φ −Φ
şi se va dezvolta cosinusul diferenŃei. Deci:
( ) ( ) ( )
( ) ( )
2 cos sin cos
cos cos sin sin
m t t k t
F t F t
ρ− Ω Β Ω +Φ − ΩΒ Ω +Φ + Β Ω +Φ =
= Ω +Φ Φ + Ω +Φ Φ
Grupând termenii în ( )sin tΩ +Φ şi în ( )cos tΩ +Φ , rezultă:
( ) ( ) ( ) ( )2 cos cos sin sin 0m k F t F tρ− Ω Β+ Β− Φ Ω +Φ − ΩΒ+ Φ Ω +Φ =
Această relaŃie trebuie să fie satisfăcută în oricare moment t deci coeficienŃii lui
( )cos tΩ +Φ şi a lui ( )sin tΩ +Φ sunt permanent nuli.
( )2cosF k mΦ = Β − Ω si sinF ρΦ = − ΩΒ (2.47)
Se calculează sinΦ şi cosΦ şi se Ńine cont de 2 2sin cos 1Φ + Φ = obŃinând:
( )22 22 2 2
2 21
k m
F F
ρ Β − ΩΩ Β+ = ; de unde rezultă
( )22 2 2 2 2k m Fρ Β − Ω + Ω = (2.48)
Amplitudinea mişcării oscilatorii întreŃinute(forŃate) în regim permanent este:
( ) 2
1222
1 ωρ+ω−=Β
mk
F
14
dar , 20ω= mk şi δ=ρ m2
( )22 2 2 2 20 4
F
m m mω δΒ =
− Ω + Ω
deci,
( )22 2 2 20 4
F
m ω δΒ =
−Ω + Ω (2.49)
şi faza iniŃială va fi exprimată prin relaŃia:
2 20
sin 2
costg
δω
Φ ΩΦ = = −
Φ −Ω (2.50)
Viteza în mişcarea oscilatorie întreŃinută în regim permanent se deduce din expresia elongaŃiei prin derivarea acestei cu timpul
( )sindx
v B tdt
= = − Ω Ω −Φ (2.51)
łinând seama de expresia amplitudinii, valoarea maximă a vitezei este dată de relaŃia.
( )max 22 2 2 2
0 4
Fv B
m ω δ
Ω= Ω =
−Ω + Ω (2.52)
Raportul Z dintre valoarea maximă a forŃei de întreŃinere şi valoarea maximă a
vitezei se numeşte impedanŃa mecanică a oscilatorului.
( )22 2 2 20
max
4F m
Zv
ω δ= = −Ω + ΩΩ
(2.53)
Dacă se înlocuiesc pulsaŃia proprie şi factorul de amortizare prin relaŃiile lor de
definiŃie (2.7) , expresia impedanŃei mecanice ia forma următoare.
2
2kZ m ρ = − Ω + Ω
(2.54)
ImpedanŃa mecanică se interpretează simplu: la o valoare dată a forŃei maxime, cu cât ea este mai mare cu atât viteza este mai mică, şi invers. Deci ea caracterizează un fel de rezistenŃă pe care o întâmpină forŃa variabilă de întreŃinere f(t) pentru apune sistemul în mişcare. Mărimea ρ (coeficientul de rezistenŃă) joacă rolul unei rezistenŃe active iar mărimea

15
k
X m= − ΩΩ
(2.55)
se numeşte reactanŃa oscilatorului. Această reactanŃă are două componente şi anume
reactanŃa elastică e
kX =
Ω (2.56)
şi reactanŃa inerŃială iX m= Ω (2.57)
2.6 RezonanŃa
2.6.1 Amplitudinea la rezonanŃa
Se observă că pe măsură ce pulsaŃia oscilaŃiei exterioare, care menŃine regimul permanent, Ω tinde către o pulsaŃie ΩR numită pulsaŃie de rezonanŃă, amplitudinea oscilaŃiei forŃate creşte foarte mult, amplitudinea B prezentând un maxim. În acest caz oscilatorul preia întreaga energie aparentă de la sursă, o foloseşte pentru învingerea rezistenŃelor şi o disipă sub formă de energie activă în mediu. Acest fenomen se numeşte rezonanŃa amplitudinilor.
În continuare se va calcula amplitudinea oscilaŃiei forŃate la rezonanŃă adică maximul funcŃiei ( )Β Ω .
Pentru ca funcŃia ( )Β Ω să prezinte un extrem este necesar ca:
( )
0R
d
d Ω=Ω
Β Ω=
Ω (2.58)
după calcularea derivatei rezultă:
( ) ( )
( )
2 2 20
322 2 2 2
0
2 40
4R
R R R
R R
d F
d m
ω δ
ω δΩ=Ω
−Ω Ω − ΩΒ Ω= ± =
Ω −Ω + Ω
(2.59)
deci pulsaŃia oscilaŃiei exterioare la care are loc rezonanŃa amplitudinilor este:
2 20 2R ω δΩ = − (2.60)
pe care îl Pentru a calcula valoarea amplitudinii la rezonanŃă ( )RΒ Ω se introduce (2.60)
în(2.49) şi rezultă:
22
0
max2 δ−ωδ
=Βm
F (2.61)
16
maxΒ în general atinge valori mult mai mari decât A amplitudinea oscilaŃiei
libere. Dacă ( )2 2
0 2 ,ω δ≤ Β Ω nu are nici un maxim în domeniul valorilor reale ale
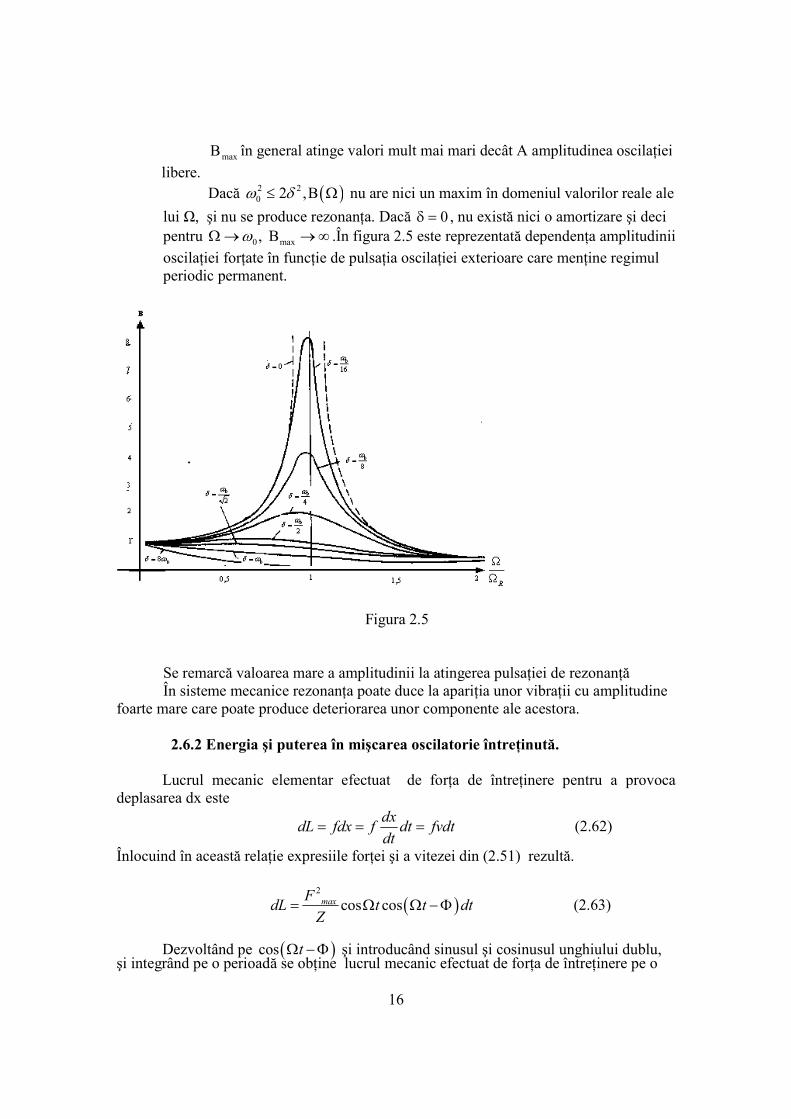
lui Ω, şi nu se produce rezonanŃa. Dacă 0=δ , nu există nici o amortizare şi deci pentru 0 max,ωΩ→ Β →∞ .În figura 2.5 este reprezentată dependenŃa amplitudinii oscilaŃiei forŃate în funcŃie de pulsaŃia oscilaŃiei exterioare care menŃine regimul periodic permanent.
Figura 2.5
Se remarcă valoarea mare a amplitudinii la atingerea pulsaŃiei de rezonanŃă În sisteme mecanice rezonanŃa poate duce la apariŃia unor vibraŃii cu amplitudine
foarte mare care poate produce deteriorarea unor componente ale acestora. 2.6.2 Energia şi puterea în mişcarea oscilatorie întreŃinută.
Lucrul mecanic elementar efectuat de forŃa de întreŃinere pentru a provoca deplasarea dx este
dx
dL fdx f dt fvdtdt
= = = (2.62)
Înlocuind în această relaŃie expresiile forŃei şi a vitezei din (2.51) rezultă.
( )2
cos cosmaxFdL t t dt
Z= Ω Ω −Φ (2.63)
Dezvoltând pe ( )cos tΩ −Φ şi introducând sinusul şi cosinusul unghiului dublu, şi integrând pe o perioadă se obŃine lucrul mecanic efectuat de forŃa de întreŃinere pe o

17
perioadă sub forma următoarei expresii:
( )2 2
max
0
cos cos 22 2
T
maxF FL t dt
Z Z
= Φ + Ω −Φ
∫ (2.64)
În urma integrării, al doilea termen se anulează căci este rezultatul integrării
funcŃiei periodice pare ( )cos 2 tΩ −Φ pe o perioadă. Prin urmare, lucrul mecanic mediu
efectiat de firŃa de întreŃinere pe o perioadă este:
2
cos2
FL T
Z= Φ (2.65)
iar puterea medie pe o perioadă este
2
cos2
L FP
T Z= = Φ (2.66)
Astfel , puterea dezvoltată de forŃa f(t) depinde nu numai de amplitudinea F a forŃei şi de viteză dar şi de diferenŃa de fazã dintre acestea. In cazul unui sistem oscilant aflat la rezonanŃă sau în cazul unei forŃe rezistente foarte mari, 0Φ = şi Z= r şi atunci:
2
max
2 2
L F FvP
T ρ= = = (2.67)
Aici puterea cheltuitã de forŃa f este întrebuinŃată pentru învingerea frecărilor care apar din timpul oscilaŃiilor şi se transformă în întregime în că1dură. În toate cazurile în care rezistenŃa activă ρ este cu mult mai mică decât ceea reactivă (2.68) adicã pentru un sistem oscilant având masa, constanta elastică, mari şi coeficientul de rezistenŃă I foarte mic cosΦ , este, aproape nul. În aceste cazuri, 0L = (2.69)
Într-o jumătate de perioadă, forŃa efectuează un lucru mecanic pozitiv, mărind energia sistemului, în cealaltă jumătate de perioadă însä, sistemul redă energia acumuIată sursei de energie. În consecinŃă, puterea totală consumată este aproape nulă.
2.6.3 OscilaŃii autoîntreŃinute
După cum s-a văzut, oscilaŃiile libere ale oricărui sistem oscilant real se amortizează treptat, în urma faptului că rezerva de energie acumulată iniŃial în sistem se consumă pentru învingerea frecării, şi se transmite mediului înconjurător. Pentru multe aplicaŃii practice din mecanică dar şi din electronică se pot construi sisteme în care pierderile de energie să fie compensate în mod continuu şi automat pe contul energiei
kmρ⟨⟨ Ω −
Ω

18
furnizate de o sursă. Aceste sisteme se numesc sisteme autooscilante, şi cu ele se pot obŃine osci1aŃii neamortizate, care durează pânã la epuizarea rezervei de energie din sursă. Matematic, oscilaŃiile neamortizate sunt reprezentate de funcŃii aproximativ armonice, sau de funcŃii de timp mai complicate.Ca un exemplu de sistem mecanic autooscilator care dă oscilaŃii neamortizate este ceasul mecanic. Într-un ceas mecanic se găseşte o sursă de energie potenŃială sub forma unui resort spiral tensionat sau a unei greutăŃi ridicate la o oarecare înălŃime. Sistemul oscilator mecanic este format dintr-un pendul sau un oscilator de torsiune denumit balansier, ale cărui oscilaŃii libere au o frecvenŃă de 2 Hz în cazul ceasului. In cea mai mare parte a perioadei, mişcarea pendulului este liberã şi numai într-un interval de timp scurt în care el trece prin poziŃia de echilibru şi are o viteză maximă, eI vine în contact cu o roată dinŃată şi un clichet prin intermediul cărora primeşte un impuls scurt de la sursa de energie. Aceste impulsuri sunt foarte mici, dar ele se produc in momentele de vitezã maximă a sistemului aflat o frecventã de rezonanŃă, adică fără defazaj ( cos 0Φ = ) şi din acest motiv sunt capabile să transmită energie suficientă pentru compensarea pierderilor. Ele menŃin amplitudinea constantă până la consumarea energiei acumulate în sursa de energie. FrecvenŃa oscilaŃiilor sistemului este determinată de frecvenŃa oscilaŃiilor libere ale pendulului sau balansierului. In alte sisteme autooscilante, sursa de energie este o sursă de energie electrică, sistemul oscilant este un circuit oscilant iar reglarea transmisiei de energie de la sursă la cest circuit este efectuată de un grup de circuite electronice. După cum se vede din aceste exemple, energia se transmite de la sursă la sistemul oscilant prin intermediul unei forŃe constante, a cărei acŃiune asupra sistemului osci1ator este reglată de însăşi reacŃiunea sistemului şi a u unui dispozitiv care reglează accesul de energie, astfel că sistemul primeşte impulsuri periodice care menŃin amplitudinea lui de oscilaŃie la un nivel constant şi compensează amortizarea produsă de disiparea energiei în mediu.
2.7 Reprezentarea mişcărilor oscilante
Pentru a rezolva problemele teoretice şi practice legate de fenomenele oscilatorii,
s-au imaginat mai multe metode de reprezentare ale acestora. 1. Reprezentarea grafică. OscilaŃiile se reprezintă grafic prin diagrame care
reprezintă desfăşurarea lor în timp. Dacă asupra aceluiaşi sistem oscilant acŃionează simultan mai multe oscilaŃii, atunci se reprezintă grafic toate oscilaŃiile care acŃionează simultan şi se obŃine o rezultantă prin compunere grafică. Compunerea grafică presupune alegerea unor eşantioane de timp şi adunarea algebrică a segmentelor care reprezintă elongaŃiile în fiecare moment. Punctele astfel obŃinute se unesc găsindu-se rezultanta
2. Reprezentarea analitică: Mărimile oscilatorii se reprezintă cu ajutorul unor expresii matematice. Aceste expresii sunt prelucrate folosind regulile din analiza matematică şi algebră, trăgându-se concluziile care se impun.
3. Reprezentarea fazorială (Fresnel) sau vectorială: se reprezintă mărimile oscilante prin fazori. Un fazor este un vector simbolic, având originea în originea sistemului de axe XOY, având modulul egal cu amplitudinea mărimii oscilatorii

19
reprezentate, făcând în momentul t cu axa OX un unghi egal cu faza 0ϕ+ωt şi rotindu-se
cu o viteză unghiulară egală cu pulsaŃia mărimii reprezentată în figura 2.6
Figura 2.6
Se observă că dacă fazorul se roteşte uniform proiecŃia acestui fazor pe axele OX respectiv OY reprezintă oscilaŃii armonice
( ) ( )( ) ( )0
0
sin
cos
ϕ+ωΑ=
ϕ+ωΑ=
tty
ttx (2.70)
Astfel operaŃiile cu mărimi oscilante se reduc la operaŃii de compunere şi
descompunere de vectori fiind valabile toate regulile, de adunare, scădere şi înmulŃire a vectorilor. Este o metodă foarte mult utilizată în rezolvarea unor probleme practice în teoria oscilaŃiilor şi în electrotehnică.
4. Reprezentarea complexă Se ataşează planului XOY în care este reprezentat fazorul A , un plan complex ca
în figura 2.7.
Figura 2.7
În electrotehnică unitatea imaginară se notează cu 1−=j pentru a evita confuziile cu intensitatea curentului. Mărimea oscilantă x(t) în complex se va nota cu
( )x t
Punctului din planul complex atins de vârful fazorului, la un moment dat, îi va corespunde un număr complex având ca parte reală ( )Re cosx tω ϕ= Α + şi ca parte
imaginară ( )Im sinx tω ϕ= Α + .
Deci numărul complex care reprezintă fazorul în planul (+1;0;+i) va fi: x Rex i Imx= + sau.
( ) ( ) ( ) ( )
x cos sin cos sint i t t i tω ϕ ω ϕ ω ϕ ω ϕ = Α + + Α + = Α + + + (2.71)
Folosind formula lui Euler se va obŃine:

20
( )ϕ+ωΑ= tiex (2.72) unde,
2 2Re Imx x x x∗Α = + = (2.73)
2.8 Compunerea oscilaŃiilor
2.8.1 Compunerea oscilaŃiilor paralele de aceeaşi pulsaŃie (sintone)
Dacă două sau mai multe forŃe care au caracter oscilant acŃionează simultan asupra aceluiaşi punct material, ele se vor compune şi punctul va efectua o mişcare oscilantă rezultantă cu o nouă amplitudine şi o nouă fază iniŃială. Se În continuare se va aborda această compunere prin metoda complexă. Se consideră un corp supus simultan acŃiunii a două oscilaŃii armonice paralele de aceeaşi frecvenŃă, care însă au amplitudini şi faze iniŃiale diferite. Ele se vor reprezenta prin urmăeoarele două numere complexe:
( )1
11ϕ+ωΑ= tiex şi ( )2
22ϕ+ωΑ= tiex
Va rezulta o oscilaŃie compusă (rezultantă) care va avea amplitudinea A şi faza iniŃială φ, care vor determinate în continuare. x reprezintă în complex rezultanta oscilantă, deci: ( ) ( )ϕ+ωϕ+ω Α+Α=+= titi eexxx 2121 (2.74)
Amplitudinea oscilaŃiei rezultante este conform relaŃiei (2.58) următoarea
( ) ( )[ ] ( ) ( )[ ]ϕ+ω−ϕ+ω−ϕ+ωϕ+ω∗ Α+ΑΑ+Α==Α titititi eeeexx 21212 (2.75)
Efectuând calculele rezultă ( ) ( ) 2
2212121
2 2112 Α+ΑΑ+ΑΑ+Α=Α ϕ−ω−ϕ+ωϕ−ω−ϕ+ω ttitti ee şi, ( ) ( )[ ]1212
2122
21
2 ϕ−ϕ−ϕ−ϕ +ΑΑ+Α+Α=Α ii ee (2.76) Utilizând relaŃiile lui Euler: α=+ α−α cos2ii ee se obŃine:
si ( )122122
21 cos2 ϕ−ϕΑΑ+Α+Α=Α (2.77)
( )2 2 21 2 1 2 2 12 cos ϕ ϕΑ = Α + Α + Α Α −

21
Faza iniŃială rezultantă φ se deduce din următoarea ecuaŃie a mişcării rezultante: ( ) ( )2121
212121ϕϕωϕωϕω Α+Α=Α+Α=+= iitiitiiti eeeeeeexxtx (2.78)
Utilizând din nou relaŃiile lui Euler şi grupând în parte reală şi parte imaginară rezultă relaŃia : ( ) ( ) ( )[ ]22112211 sinsincoscos ϕΑ+ϕΑ+ϕΑ+ϕΑ= ω ietx ti (2.79) Se vor face următoarele notaŃii 2211 coscoscos ϕΑ+ϕΑ=ϕΑ şi 2211 sinsinsin ϕΑ+ϕΑ=ϕΑ (2.80) aceste notaŃii înlocuite în relaŃia (2.64), duc la următorul rezultat. ( ) ( ) ( )ϕ+ωϕωω Α=Α=ϕ+ϕΑ= tiititi eeeietx sincos Faza mişcării rezultante este φ introdus prin notaŃiile (2.65). Prin urmare,
2211
2211
coscos
sinsin
cos
sin
ϕΑ+ϕΑ
ϕΑ+ϕΑ=
ϕϕ
=ϕtg (2.81)
2.8.2 Compunerea oscilaŃiilor paralele cu pulsaŃii diferite
Se va analiza în continuare situaŃia când 21 ω≠ω . Repetând calculele de la situaŃia precedenta va rezulta amplitudinea rezultantă:
( )[ ]12212122
21 cos2 ϕ−ϕ+ω−ωΑΑ+Α+Α=Α t (2.82)
Observând relaŃia (2.67) se constată că amplitudinea mişcării rezultante depinde de timp, ea are o variaŃie periodică între o valoare maximă Amax şi una minimă Amin. maxΑ=Α atunci când ( )[ ] 1cos 1221 =ϕ−ϕ+ω−ω t
deci:
212122
21max 2 Α+Α=ΑΑ+Α+Α=Α (2.83)
şi minΑ=Α , atunci când ( )[ ] 1cos 1221 −=ϕ−ϕ+ω−ω t deci:
212122
21min 2 Α−Α=ΑΑ−Α+Α=Α (2.84)
Amplitudinea oscilaŃiei rezultante se va modifica între 21 Α+Α şi 21 Α−Α dacă
12 ϕ=ϕ .
Pentru ( ) π=ω−ω 212 t avem maxim. Se va nota cu τ timpul după care apare al doilea maxim. Deci: ( )( ) π=τ+ω−ω 412 t (2.85) Făcând diferenŃa rezultă perioada oscilaŃiei rezultante

22
12
2
ω−ωπ
=τ (2.86)
Deci amplitudinea mişcării se va modifica între maxΑ şi minΑ cu perioada τ, ca în
figura 2.8.
Fig. 2.8
OscilaŃiile în care amplitudinea variază în timp se numesc bătăi. În aparatura de recepŃie radiotelegrafică există oscilatorul „beat” a cărui frecvenŃă se poate modifica manual în aşa fel încât radiotelegrafistul, prin sesizarea bătăilor, să poată separa auditiv un emiŃător de altul.
2.8.3 Compunerea oscilaŃiilor perpendiculare, de aceeaşi frecvenŃă
Se întâlneşte des situaŃia în care un corp este supus simultan la două mişcări oscilatorii armonice, una efectuându-se pe axa OX şi cealaltă pe OY. Între ele există un defazaj ϕ∆ . AdmiŃând (prin alegerea sistemului de referinŃă) că faza iniŃială a mişcării pe axa OX este nulă, ecuaŃiile de mişcare vor fi:
Pe Ox, tx ωΑ= cos (2.87) şi pe Oy, ( )ϕ∆+ωΒ= ty cos (2.88)
din (2.87) rezultă tx
ω=Α
cos , şi 2
2sin 1x
tω = −Α
(2.89)
Se dezvoltă ( )cos tω ϕ+ ∆ din (2.88)
ϕ∆ω−ϕ∆ω=Β
sinsincoscos tty
(2.90)
se înlocuiesc în (2.90) tωcos şi tωsin , din (2.89) şi rezultă:
ϕ∆Α
−−ϕ∆Α
=Β
sin1cos2
2xxy (2.91)
sau,

23
Β
−ϕ∆Α
=ϕ∆Α
−yxx
cossin12
2
(2.92)
se ridică la pătrat relaŃia (2.77)şi se obŃine:
2
22
2
22
2
2
cos2
cossin1Β
+ϕ∆ΑΒ
−ϕ∆Α
=ϕ∆
Α−
yxyxx (2.93)
sau,
( )2
222
2
22 cos
2cossinsin
Β+ϕ∆
ΑΒ−ϕ∆+ϕ∆
Α=ϕ∆
yxyx (2.94)
grupând termenii,
ϕ∆=ϕ∆ΑΒ
−Β
+Α
2
2
2
2
2
sincos2xyyx
(2.95)
Aceasta formulă reprezintă ecuaŃia unei elipse înscrise într-un dreptunghi cu
laturile 2A si 2B, ale cărei laturi nu coincid cu axele OX şi OY ele fiind rotite cu un unghiψ care satisface relaŃia
ϕ∆Β−Α
ΑΒ=ψ cos
22
22tg (2.96)
Această elipsă este reprezentată în figura 2.9.
Figura 2.9
- Pentru π=ϕ∆ k2 ecuaŃia elipsei devine 02
2
2
2
2
=Β
+ΑΒ
−Α
yxyx sau 0
2
=
Β
−Α
yx
sau
xyΑΒ
= (2.97)
deci elipsa degenerează în dreapta AC
- Pentru ( )π+=ϕ∆ 12k , ecuaŃia devine 02
2
2
2
2
=Β
+ΑΒ
+Α
yxyx (2.98)
sau ,

24
xyΑΒ
−= (2.99)
adică elipsa degenerează în dreapta BD
- Pentru alte valori ale lui ϕ∆ se obŃin elipse cu diferite excentricităti şi înclinări faŃă de axe.
Elipse stângi
Elipse drepte
Figura. 2.10
În cazul când pulsaŃiile celor două mişcări armonice nu mai sunt egale, în funcŃie de diferenŃa de fază şi de raportul amplitudinilor, se obŃin figuri mai complicate numite figurile lui Lissajaus. În figura 2.11 sunt reprezentate figurile lui Lissajaus rezultate prin compunerea oscilaŃiilor perpendiculare care au defazajele reprezentate pe orizontală şi raportul frecvenŃelor pe verticală.
Figura 2.11
Curbele obŃinute sunt curbe închise doar dacă 2
1
2
1
k
k=
ω
ω unde 1k si 2k sunt
numere întregi. Cunoscând 1ω şi determinând raportul 2
1
k
k se poate determina o pulsaŃie
necunoscută 2ω . De regulă vizualizarea oscilaŃiilor de natură electrică (semnalelor)se

25
face pe ecranul unui osciloscop. Dacă mărimile observate sunt de natură neelectrică ele se convertesc în semnale electrice corespunzătoare cu ajutorul unor dispozitive traductoare alese în mod corespunzător.
2.9 Descompunerea mişcării periodice
S-a constatat că, dacă se suprapun mai multe mişcări oscilatorii armonice,
mişcarea rezultantă nu mai este o oscilaŃie armonică. OscilaŃiile care apar în tehnică sunt în general oscilaŃii nearmonice. De mare importanŃă în studiul oscilaŃiilor este descompunerea unei oscilaŃii nearmonice în oscilaŃii armonice, care pot fi studiate mult mai uşor. Matematicianul francez Fourier a rezolvat această problemă prin demonstrarea unei teoreme care se enunŃă în felul următor:
O funcŃie y = f(t) continuă pe intervalul de la 1t la Τ+= 12 tt se dezvoltă într-o serie de forma
( ) ( )∑∞
=
ω+ωΒ+Α==1
0 sincosn
nn tnCtntfy (2.100)
CoeficienŃii nn C,,0 ΒΑ sunt:
( )∫Τ
Τ=Α
o
dttf1
0 ; (2.101)
( )∫Τ
ωΤ
=Β0
cos2
tdtntfn (2.102)
şi ( )∫Τ
ωΤ
=0
sin2
tdtntfCn (2.103)
CondiŃii: - y sa fie finit - să aibă un număr finit de maxime şi minime - să aibă un număr finit de discontinuităŃi Deci orice oscilaŃie nearmonică se poate scrie în felul următor:
( ) ( ) ( ) ( ) ...3sin3cos2sin2cossincos 3322110 +ω+ωΒ+ω+ωΒ+ω+ωΒ+Α= tCttCttCttf
(2.104)
primul termen se numeşte termen de ordin 0, al doilea, termen de ordinul I sau fundamental (armonica fundamentală), iar termenii de ordinul superior sunt armonice superioare. Deci orice oscilaŃie, indiferent de forma lui f(t), dacă îndeplineşte condiŃiile teoremei Fourier poate fi considerată ca o suprapunere de oscilaŃii armonice. Seria fiind convergentă, amplitudinile armonicelor scad cu ordinul lor. Seria constă deci dintr-un termen constant şi un număr infinit de oscilaŃii cu pulsaŃii ω (fundamentala), 2ω prima armonica, 3ω a doua, etc.

26
Fig.2.11 Spre exemplificare procesul periodic reprezentat grafic in figura 2.11a se poate reprezenta analitic prin seria 2.79 iar cel reprezentat grafic in figura 2.11b prin seria 2.80
4 1 1
sin sin3 sin 5 ...3 5
Ax t t tω ω ω
π = + + +
(2.105)
2 1 1 1
sin sin 2 sin 3 sin 4 ....2 3 4
Ax t t t tω ω ω ω
π = + + + +
(2.106)
În foarte multe aplicaŃii este convenabil sa se reprezinte seria Fourier corespunzătoare unui proces periodic printr-o diagrama in care sa fie reprezentate printr-o serie de segmente valorile amplitudinii armonicelor in funcŃie de frecventa lor. De exemplu pentru seria 2.91 aceasta diagrama este reprezentata în figura 2.12 ω
Figura 2.12
Fiecare linie este numită linie spectrală iar totalitatea liniilor formează spectrul de linii a oscilaŃiei date. Fiecare linie corespunde unei oscilaŃii armonice având o singură
……….
ω 2ω 3ω 4ω
1 1/2 1/3 1/4 ………

27
frecvenŃă(pulsaŃie) numită oscilaŃie monocromatică. Întrucât succesiunea frecvenŃelor nu este continuă un astfel de spectru este denumit spectru discontinuu. Un asemenea spectru apare la instrumentele muzicale cu corzi, cu arcuş(vioară, violă, violoncel, contrabas )
În situaŃia in care procesul nu este periodic (de exemplu saltul de presiune produs de un sunet scurt ) succesiunea de frecvenŃe este redată de o funcŃie continuă , iar amplitudinea este redată tot de o funcŃie continuă calculabilă printr-o integrală denumită integrala Fourier. Procese precum oscilaŃia amortizată sau un fenomen reprezentat printr-un salt de durata finita a unei mărimi poate fi reprezentată ca suma unei infinităŃi de armonice care au amplitudini infinit de mici si frecvenŃe infinit de apropiate care se extind până la infinit. Limita acestei sume este integrala Fourier. Descompunerea proceselor periodice sau neperiodice în spectre nu este o simplă operaŃie matematică, ea este o realitate fizică sesizabilă experimental sau auditiv, în cazul sunetelor, care nu sunt altceva decât oscilaŃii ale aerului. În acest din urmă caz, suprapunerea fundamentalei cu armonicele conferă sunetului o calitate specială numită timbru. Fiecare sursă sonoră are un timbru specific, după care el poate fi recunoscut.

28
3.Unde elastice
3.1 Propagarea oscilaŃiilor în medii elastice. Fenomene fundamentale. DefiniŃii.
Un mediu elastic este un mediu continuu format din puncte materiale între care se
exercită forŃe elastice sau cvasielastice. Dacă deformările care intervin nu sunt prea mari şi forŃele elastice sunt liniare, mediul este numit mediu elastic liniar. Dacă un punct al unui astfel de mediu este perturbat (scos din poziŃia de echilibrare) el va oscila sub acŃiunea combinată a forŃelor elastice, de inerŃie şi de rezistenŃă. Acest punct fiind legat de punctele învecinate prin forŃe de tip elastic, va transmite energie şi impuls acestor puncte care vor oscila şi ele. Astfel, din aproape în aproape, toate punctele mediului vor începe să oscileze.
Acest fenomen de transmitere a unei perturbaŃii din aproape în aproape într-un mediu elastic se numeşte undă elastică. Punctul care prin oscilaŃie a dat naştere undei, se numeşte sursă. Fiecare punct oscilează cu frecvenŃa sursei dar cu o oarecare întârziere faŃă de aceasta, deci cu o altă fază. Se pot da foarte multe exemple: perturbaŃia transversală care se propagă de-a lungul unei corzi elastice lovite, valurile concentrice care se propagă pe suprafaŃa apei după căderea unei pietre, (figura 3.1) oscilaŃiile maselor de aer care prin propagare generează sunetele, etc. SpaŃiul din jurul sursei care a devenit sediul undei se numeşte câmp de unde.
Dacă unda se propagă pe o singură direcŃie, cum se întâmplă în cazul perturbaŃiei care se deplasează de-a lungul unei corzi sau a unei bare se spune că unda este unidimensională. Dacă propagarea are loc radial în acelaşi plan, cum se întâmplă cu valurile produse la suprafaŃa liberă a unui lichid, unda este numită superficială sau bidimensională. Atunci când propagarea are loc radial în întreg spaŃiul unda se numeşte spaŃială sau, tridimensională.
DistanŃa pe care oscilaŃia s-a propagat ,într-o perioadă în lungul direcŃiei de propagare se numeşte lungime de undă. Dacă se notează cu c viteza de propagare a undei (celeritatea) :
ν
=⋅=λc
Tc (3.1)
Locul geometric al punctelor celor mai depărtate de sursă, atinse la un moment
dat de mişcarea oscilatorie se numeşte front de undă, iar locul geometric al punctelor atinse în acelaşi moment de mişcarea oscilantă se numeşte suprafaŃă de undă, ca în figurile 3.1 şi 3.2

29
Figura 3.1 Dacă oscilaŃiile se efectuează pe direcŃia de propagare a undei, aceasta se numeşte
undă longitudinală, iar dacă oscilaŃia se produce perpendicular pe direcŃia de propagare, unda se numeşte transversală.
Figura 3.2 Într-un mediu elastic, particulele care alcătuiesc mediul nu se propagă odată cu
unda, ele nu execută decât mişcări oscilatorii în jurul poziŃiei de echilibru. Ceea ce se propagă este doar mişcarea oscilatorie, a cărei fază se modifică şi prin care se transmit energia şi impulsul.
3.2 EcuaŃia de propagare a undelor elastice
3.2.1 EcuaŃia de propagare a unei unde elastice transversale pe o coardă infinit de lungă (EcuaŃia corzii vibrante)
Se va considera o coardă elastică omogenă infinit de lungă, solicitată la întindere
cu tensiunea T. La un moment dat într-un punct al corzii, acŃionează o forŃă perturbatoare perpendiculară pe lungimea acesteia provocându-i o deformare transversală. După încetarea forŃei perturbatoare, rezultanta forŃelor elastice F, tinde să readucă elementul de coardă la poziŃia iniŃială şi să anuleze deformarea. Datorită inerŃiei mişcarea transversală continuă, deformarea producându-se de astă dată de cealaltă parte a corzii şi transmiŃându-se în regiunile învecinate ca în figura 3.3. Datorită acŃiunii combinate a
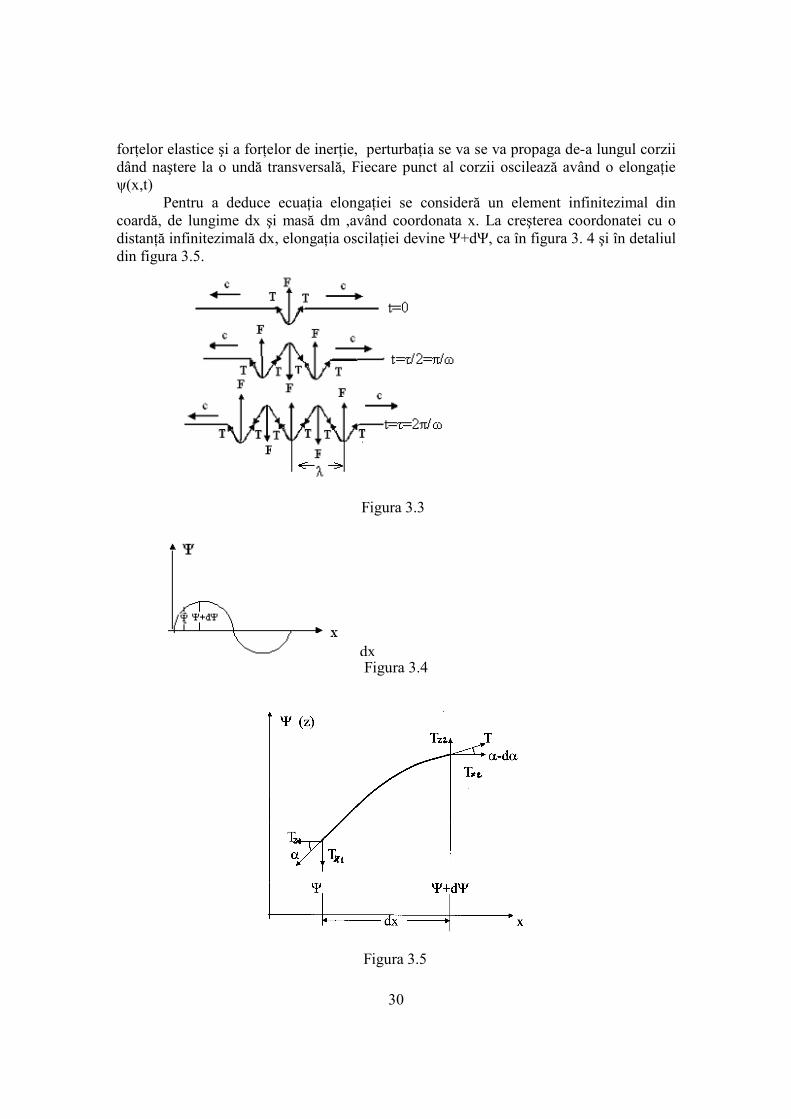
30
forŃelor elastice şi a forŃelor de inerŃie, perturbaŃia se va se va propaga de-a lungul corzii dând naştere la o undă transversală, Fiecare punct al corzii oscilează având o elongaŃie ψ(x,t)
Pentru a deduce ecuaŃia elongaŃiei se consideră un element infinitezimal din coardă, de lungime dx şi masă dm ,având coordonata x. La creşterea coordonatei cu o distanŃă infinitezimală dx, elongaŃia oscilaŃiei devine Ψ+dΨ, ca în figura 3. 4 şi în detaliul din figura 3.5.
Figura 3.3
Figura 3.4
Figura 3.5
dx

31
Rezultanta forŃelor elastice care readuc elementul de coardă în poziŃia de echilibru este yy 21 Τ−Τ deci conform principiului II al lui Newton:
admyy ⋅=Τ−Τ 21 (3.2)
dar, conform definiŃiei, acceleraŃia elementului de coardă se exprimă prin relaŃia următoare.
( )2
2
,t
txa∂
ψ∂=ψ= && (3.3)
iar din figura 3.5 se deduce αΤ=Τ sin11y , şi ( )α−αΤ=Τ dy sin22 (3.4)
prin urmare rezultanta este: 1 2y yΤ −Τ sin sin cos sin cosd dα α α α α= Τ −Τ +Τ (3.5)
dar cosd 1α ≈ şi sind dα α≈ ( )1 2 cosy y d Td sinα α αΤ −Τ = Τ ⋅ = (3.6)
Deci ( )2
2
sindt
dmdψ∂
⋅=αΤ (3.7)
lungimea elementului de coardă fiind extrem de mică şi unghiul α fiind de asemenea mic, se poate utiliza aproximaŃia: α≈α tgsin . Înlocuind această aproximaŃie în (3.6) se obŃine:
( )2
2
dtdmtgd
ψ∂⋅=αΤ (3.8)
Se observă în figura 3.5 că se poate scrie cu o aproximaŃie foarte bună relaŃia următoare:
x
tg∂ψ∂
=α (3.9)
Înlocuind (3.9) în (3.8) rezultă următoarea ecuaŃie diferenŃială
2 2
2 2dxx t
ψ ψµ
∂ ∂Τ⋅ = ⋅
∂ ∂ sau
2
2
2
2
tx ∂
ψ∂Τµ
=∂
ψ∂ (3.10)
Această ecuaŃie diferenŃială cu derivate parŃiale este numită ecuaŃia corzii
vibrante.

32
Rezolvarea acestei ecuaŃii în condiŃiile impuse de problemă, permite aflarea elongaŃiei oscilaŃiei punctului de pe coardă de coordonată x şi la momentul t. Notând :
µΤ
=c (3.11)
ecuaŃia va lua următoarea formă.
2
2
22
2 1
tcx ∂
ψ∂=
∂
ψ∂ (3.12)
Se observă că mărimea constantă c are dimensiunea unei viteze. Ea este chiar
viteza de propagare a fazei undei pe coardă (această afirmaŃie va fi demonstrată ulterior).
3.2.2 EcuaŃia de propagare a unei unde elastice longitudinale printr-o bară.
Un alt caz de propagare unidimensională este propagarea unidimensională a unei perturbaŃii longitudinale de-a lungul unui mediu care are lungimea foarte mare în raport cu dimensiunile sale transversale, cum se întâmplă în cazul unei bare ,Ńevi, şine, etc. Se va considera în continuare o bară elastică cu densitatea ρ, modulul de elasticitate E, şi secŃiunea constantă S. Această bară este perturbată într-un punct, la momentul iniŃial de exemplu printr-o comprimare. După încetarea acŃiunii care a produs deformarea, forŃele elastice vor tinde să anuleze această deformare, readucând elementul comprimat la dimensiunea iniŃială. Însă datorită inerŃiei mişcarea va continua elementul de bară alungindu-se şi comprimând regiunile învecinate. Şi astfel din aproape în aproape, sub acŃiunea combinată a forŃelor elastice şi de inerŃie, apare o undă longitudinală care constă în oscilaŃii ale elementelor barei care se propagă de-a lungul ei ca în figura 3.6. Pentru a afla elongaŃia oscilaŃiei într-un punct aflat la distanŃa x de sursa perturbaŃiei, se va considera în jurul punctului de coordonată x, un element de bară infinit de mic de lungime dx. Datorită propagării undei, acest element de bară la momentul t este deformat
( comprimat sau alungit) cu dψ şi va răspunde acŃiunii forŃei perturbatoare Fr cu o
reacŃiune FdFrr
+ , forŃa rezultantă fiind FFdFrrr
−+ ca în figura 3.7
Figura 3.6
Figura 3.7777
λ
t=0
t=τ =2πω
Ψ dΨ + Ψ
33
Figura 3.7 Conform principiului II al lui Newton rezultă:
admFFdF =−+rrr
(3.13)
sau,
2
2
tdmdF
∂
∂=
ψ (3.14)
ForŃa F fiind o forŃă elastică liniară, se aplică legea lui Hooke:
0
F lE
S l
∆= (3.15)
alungirea relativă este:
0
l
l x
ψ∆ ∂=∂ (3.16)
deci forŃa elastică din bară este dată de următoarea relaŃie:
F SEx
ψ∂=
∂ (3.17)
Pentru a-l afla pe dF vom diferenŃia relaŃia şi obŃinem:
dxx
SEx
dSEdF2
2
∂
ψ∂=
∂ψ∂
⋅= (3.18)
deci,
2
2
2
2
tdmdx
xSE
∂
ψ∂=
∂
ψ∂ (3.19)
masa elementului de bară este: Sdxdvdm ρ=ρ= şi prin urmare ecuaŃia de propagare a perturbaŃiei longitudinale pe bară va lua următoarea formă.
2 2
2 2E
x t
ψ ψρ
∂ ∂=
∂ ∂ (3.20)
Această ecuaŃie se numeşte ecuaŃia barei vibrante. Dacă se face notaŃia,

34
ρ
=E
c (3.21)
obŃinem că ecuaŃia diferenŃială de propagare a unei unde longitudinale pe bară are din punct se vedere matematic aceeaşi formă ca şi ecuaŃia corzii vibrante(3.12):
2
2
22
2 1
tcx ∂
ψ∂=
∂
ψ∂
EcuaŃii cu această formă apar ori de câte ori o perturbaŃie se propagă
unidimensional şi din acest motiv ea este denumită ecuaŃia undelor unidimensionale.
eF
lcm
S
∂∂=∂∂
(3.34)
3.2.4 EcuaŃia de propagare a unei unde elastice tridimensionale
În cazul cel mai general, într-un mediu elastic, liniar, omogen şi izotrop unda se propagă în toate direcŃiile prin oscilaŃii longitudinale (de exemplu, sunetul sau undele seismice).Pentru a deduce ecuaŃia undelor volumice tridimensionale, în continuare vor fi generalizate fără o demonstraŃie riguroasă rezultatele obŃinute anterior la paragrafele dedicate undelor unidimensionale şi bidimensionale, în felul următor:
trecerea de la propagarea unidimensională la ceea bidimensională a introdus după
cum s-a arătat în ecuaŃia de propagare termenul 2
2
y∂
ψ∂ corespunzând noii coordonate.
Deci se poate admite că, trecerea la tridimensionalitatea undei va introduce în primul membru al ecuaŃiei diferenŃiale a undei încă o derivată parŃială de ordinul II, respectiv
2
2
z∂
ψ∂ deci ecuaŃia undelor spaŃiale tridimensionale trebuie să aibă următoarea formă.
2 2 2 2
2 2 2 2 2
1
x y z c t
ψ ψ ψ ψ∂ ∂ ∂ ∂+ + =
∂ ∂ ∂ ∂ (3.35)
In caz propagării unidimensionale, s-a dedus că constanta c se calculează cu
ajutorul unei formule de forma (3.11), care mai poate fi scrisă şi în felul următor.

35
eFcm
l
µΤ
= =∂∂
(3.36)
iar formula de calcul a acestei constante în cazul bidimensional este de forma
relaŃiei (3.34).Se poate deci afirma că trecerea la propagarea spaŃială va introduce în formula lui c câte o nouă dimensiune, în modul următor,
eFpSc
m
V
ρ
∂∂∂= =
∂ ∂∂
(3.37)
Această constantă este după cum s-a mai afirmat anterior tocmai viteza de propagare a undei în mediu.
RelaŃia (3.37) permite deducerea relaŃiei care permite calcularea vitezei de propagare a undei acustice într-un gaz ideal. Unda acustică este o undă spaŃială care constă în oscilaŃii longitudinale ale maselor de gaz. Considerând că mişcările suferite de masa de gaz sunt suficient de rapide pentru a nu face schimb de căldura cu mediul, transformările acesteia sunt adiabatice şi deci satisfac ecuaŃia lui Poissson
pv A constantγ = = . (3.38) Masa gazului fiind constantă, relaŃia aceasta se poate pune şi sub următoarea
formă.
A m A
pm V m
γγ
γ γ γ ρ= = (3.39)
deci:
1
2 11
p A pV m pVc
m m V m
γ γγ
γ γ γγ ρ γ γρ
−−
−
∂= = = =∂
(3.40)
luând în considerare şi ecuaŃia de stare a gazului ideal,
m
pV RTµ
= , (3.41)
în final se obŃine relaŃia: RT
c γµ
= (3.42)

36
µ ,reprezintă masa molară a gazului. La temperatura camerei viteza sunetului în aer este de aproximativ 340 m/s. Revenind la ecuaŃia (3.35) a undei tridimensionale obŃinute prin generalizare, aceasta se poate scrie simbolic în modul următor:
2
2
22
2
2
2
2
2 1
tczyx ∂
ψ∂=ψ
∂
∂+
∂
∂+
∂
∂ (3.43)
Entitatea matematică
∂
∂+
∂
∂+
∂
∂=∆
2
2
2
2
2
2
zyx (3.44)
se numeşte operatorul lui Laplace sau mai pe scurt „laplacian”. Astfel ecuaŃia undei se scrie:
2
2
2
1
tc ∂
ψ∂=ψ∆ (3.45)
această relaŃie se mai poate pune şi sub forma
01
2
2
2=ψ
∂
ψ∂−∆
tc (3.46)
Entitatea matematică (operatorul)
= 2
2 2
1
c t
ψ ∂∆ − ∂
(3.47)
se numeşte operatorul lui d’Alambert sau d’alambertian deci ecuaŃia undelor tridimensionale se poate scrie şi sub următoarea formă: 0Ψ = (3.48)
3.3 SoluŃia ecuaŃiei undelor
În continuare se pune problema găsirii soluŃiei undelor ecuaŃiei: 2
2 2
1
c t
∂ ψ∆ψ =
∂.
SoluŃia acestei ecuaŃii diferenŃiale a fost studiată de matematicieni şi s-a stabilit că depinde de condiŃiile iniŃiale şi de frontieră. Forma suprafeŃei de undă depinde de forma sursei care a produs perturbaŃia şi de proprietăŃile mediului.

37
3.3.1 SoluŃia ecuaŃiei undelor unidimensionale
Să considerăm o undă care se propagă unidimensional ( de exemplu unda propagată pe o coardă infinită, omogenă), după cum am văzut ecuaŃia de propagare a undei pe ea, este dată de ecuaŃia (3.12) :
( ) ( )2 2
2 2 2
, ,1x t x t
x c t
∂ ψ ∂ ψ=
∂ ∂
Să considera că unda este propagarea unei mişcări oscilatorii armonice, provenind
dintr-o sursă O care oscilează armonic. În continuare se va deduce funcŃia ( ),x tψ care
este elongaŃia oscilaŃiei, unui punct M de pe un mediu unidimensional(coardă, bară, ghid de undă, tub sonor, etc. ) situat la distanŃa x de O, la momentul t .Pentru aceasta, se rescrie ecuaŃia undelor unidimensionale în modul următor:
1 1
0x c t x c t
ψ∂ ∂ ∂ ∂ − + = ∂ ∂ ∂ ∂
, (3.49)
se introduc două variabile auxiliare x ctη = − şi x ctξ = + . Derivata parŃială în raport cu x se poate exprima în modul următor
x x x
η ξη ξ η ξ
∂ ∂ ∂ ∂ ∂ ∂ ∂= + = +
∂ ∂ ∂ ∂ ∂ ∂ ∂ (3.50)
şi ceea în funcŃie de timp se exprimă în modul următor
ct t t
η ξη ξ η ξ
∂ ∂ ∂ ∂ ∂ ∂ ∂= + = − ∂ ∂ ∂ ∂ ∂ ∂ ∂
(3.51)
înlocuind în ecuaŃia ( 3.49 ) se obŃine relaŃia următoare
2
4 0ψ
η ξ∂
=∂ ∂
sau, 0ψ
η ξ ∂ ∂
= ∂ ∂ (3.52)
deci :ψξ
∂∂
nu depinde deη fiind o funcŃie arbitrară F(ξ) numai de variabila
auxiliară ξ. prin urmare,
( ) ( )1F d fψ ξ ξ η= +∫ (3.53)
( )1f η este o funcŃie arbitrară de η iar
( ) ( )2f F dξ ξ ξ= ∫ (3.54)
este o funcŃie arbitrară de ξ, deci soluŃia generală a ecuaŃiei undelor
unidimensionale este:

38
( ) ( ) ( ) ( ) ( )1 2 1 2,x t f f f x ct f x ctψ η ξ= + = − + + (3.55)
FuncŃiile 1f şi 2f fiind arbitrare există o infinitate de soluŃii. Forma concretă a
funcŃiilor arbitrare 1f şi 2f depinde de condiŃiile iniŃiale adică de geometria şi modul de
oscilaŃie a sursei şi de condiŃiile la frontieră adică de limitările impuse de mediul înconjurător propagării undei.
f1 se numeşte unda directă sau progresivă care se propagă dinspre sursă, iar f2 unda regresivă sau indirectă care se propagă spre sursă.
3.3.2 SoluŃia ecuaŃiei undelor tridimensionale în cazul mediului omogen şi izotrop şi a sursei punctiforme. Unda sferică
În cazul în care propagarea undei nu este limitată la o singură direcŃie ca în cazul propagării pe o coardă, elongaŃia punctelor materiale ale mediului, la un moment t nu depinde doar de coordonata x, ci şi de coordonatele y şi z deci unda se va propaga tridimensional şi ecuaŃia undei va avea următoarea formă forma generală:
2
2
2 tc
1
∂
Ψ∂=∆Ψ sau
2
2
22
2
2
2
2
2 1
tczyx ∂
Ψ∂=
∂
Ψ∂+
∂
Ψ∂+
∂
Ψ∂
Dacă sursa este punctiformă şi mediul este omogen şi izotrop, suprafeŃele de undă vor avea forma sferică. Acest lucru se justifică foarte simplu prin faptul că în acest caz propagarea se face în toate direcŃiile în mod identic. łinând cont de simetria sferică a problemei este comod să trecem de la coordonatele carteziene la coordonatele sferice:
θϕ,,r ca în figura 3.9
x = r sinθcosϕ ; y = r sinθsinϕ ; z = r cosθ
Figura 3.9
În coordonate sferice expresia operatorului Laplace va fi:
( ) ( )2 2
2 2 2 2 2
1 1 1, , sin
sin sin
rr
r r r r
ψ ψϕ θ θ
θ θ θ θ ϕ∂ Ψ ∂ ∂ ∂ ∆Ψ = + + ∂ ∂ ∂ ∂
(3.56)

39
În cazul mediului omogen şi izotrop, elongaŃia nu poate să depindă de θϕ,
(comportamentul undei este acelaşi în toate direcŃiile) deci 0=θ∂Ψ∂
0=ϕ∂Ψ∂
Prin urmare, din laplaceian nu rămâne decât componenta radială,
( )2
2
1r
r
r r
ψψ
∂∆ =
∂ (3.57)
Deci ecuaŃia undelor sferice se reduce la următoarea formă:
( )2 2
2 2 2
1 1r
r r c t
ψψ
∂ ∂=
∂ ∂ (3.58)
dar la un moment t, are o valoare constantă deci poate fi introdusă în derivată din al doilea membru:
( ) ( )2 2
2 2 2
1r r
r c t
∂ ∂Ψ = Ψ
∂ ∂ (3.59)
Notând Ψ= rF ecuaŃia devine:
2
2
22
2 1
t
F
cr
F
∂
∂=
∂
∂ (3.60)
Se observă că această ecuaŃie diferenŃială are aceeaşi formă ca şi ecuaŃia
unidimensională a undelor, cărei soluŃie a fost deja dedusă ca având următoarea formă.: ( ) ( )1 2F f r ct f r ct= − + + (3.61)
deci ecuaŃia elongaŃiei este următoarea:
( ) ( ) ( )1 2
1,r t f r ct f r ct
rψ = − + + (3.62)
În concluzie, se constată că amplitudinea undei sferice scade cu distanŃa.
3.3.3 AproximaŃia de unda plană, neatenuată.
În aplicaŃiile practice dacă distanŃa de la sursă la observator este mult mai mare decât lungimea de undă, iar domeniul D în care se face observaŃia este mult mai mic decât această distanŃă curbura suprafeŃei de faza sferice se poate neglija. In acest caz suprafaŃa de undă sferică devine aproximativ o suprafaŃă plană.(figura 3.10) În această aproximaŃie unda se va numi undă plană. În acest caz, în domeniul D distanŃa r de la sursă nu prezintă variaŃii importante, deci din relaŃia(3.61) rezultă că amplitudinea nu scade cu distanŃa, ea rămâne constantă.

40
Figura.3.10
În figura(3.10) arcele de cerc, reprezintă intersecŃii ale suprafeŃelor de fază cu planul desenului, iar segmentul vertical intersecŃia unui plan tangent la acest suprafeŃe cu acelaşi plan al figurii. Se remarcă faptul că în domeniul restrâns D diferenŃa dintre arcul de cerc şi segmentul de dreaptă este foarte mică. Eroarea scade odată cu creşterea distanŃei de la sursă.
3.3.4 Unda armonică plană
S-a constatat că orice oscilaŃie poate fi considerată ca o suprapunere de oscilaŃii armonice, deci de o mare importanŃă este studierea undelor provocate de oscilatori armonici în medii omogene şi izotrope. Daca sursa execută oscilaŃii armonice , funcŃiile f1 si f2 vor fi tot funcŃii armonice şi unda se va numi undă armonică plană . Se va numi undă armonică plană o undă armonică studiată într-un domeniu restrâns la o mare distanŃă de sursă.
3.3.4.1 EcuaŃia undei armonice plane
Se consideră o undă armonică plană, pornită dintr-o sursă aflată în origine.
DirecŃia de propagare a undei este definită de versorul ur. Se va deduce ecuaŃia elongaŃiei
produsă de undă, într-un punct P definit de vectorul de poziŃie rr, ca în figura 3.11
(pentru a nu complica desenul , în această figură s –a făcut doar o reprezentare în planul xoy, şi din acest motiv suprafeŃele de fază vor fi reprezentate prin segmente perpendiculare pe direcŃia de propagare)

41
Figura 3.11 Considerând că sursa oscilează armonic, elongaŃia oscilaŃiei sale este dată de relaŃia:
( )0, cost A tψ ω= (3.68)
Punctul P începe sa oscileze in momentul în care este atins prima oara de frontul de
undă, adică, întârziat faŃă de oscilaŃia sursei cu timpul τ necesar frontului de unda sa străbată distanta OM.
( ) ( )2 1 2 1cos cosOP rOM
c c c
α α α ατ
− −= = = (3.69)
EcuaŃia elongaŃiei oscilaŃiei în P va fi:
( ) ( ) ( )2 1 2 1cos cos, cos ( ) cos( )
r rr t A t A t
c c
α α ω α αψ ω ω
− −= − = −
r (3.70)
înlocuind în (3.70) forma explicită a pulsaŃiei, rezultă:
( ) ( )2 12 cos, cos( )
rr t A t
Tc
π α αψ ω
−= −
r (3.71)
se introduce mărimea fizică denumită număr de undă, prin relaŃia .
2 2
kTc
π πλ
= = (3.72)
Se introduce vectorul, numit vector de undă, care are modulul egal cu numărul de
undă k şi are direcŃia şi sensul de propagare al undei.
2
k uπλ
=r r
(3.73)
Se observă că produsul scalar dintre vectorul de poziŃie a punctului P şi vectorul
de undă se poate exprima în modul următor

42
( ) ( )2 1
2 1
2 coscos
rkr kr
π α αα α
λ−
= − =rr (3.74)
Prin urmare, ecuaŃia elongaŃiei oscilaŃiei în P va fi următoarea.
( ), cos( )r t A t krψ ω= −rr r (3.75)
Această ecuaŃie este denumită ecuaŃia undei armonice plane, sau ecuaŃia undei
monocromatice plane. Utilizând scrierea cu mărimi complexa ecuaŃia va lua următoarea formă.
( )( , )i t kr
r t Aeω −
Ψ =rrr (3.76)
SuprafeŃele de fază vor fi plane paralele între ele, orientate perpendicular pe
direcŃia de propagare
3.4 Energia transportată de undele elastice longitudinale. Intensitatea undei elastice
Particulele constituente ale unui mediu elastic prin care se propagă o undă, de o undă execută oscilaŃii deci devin oscilatori elementari care au fiecare energie. Suma acestor energii pe întreg mediul este energia transportată de undă în acel mediu. Se va considera un mediu elastic liniar, nemărginit de densitate ρ , prin care se propagă o undă armonică longitudinală Această undă se propagă radial pornind dintr-o sursă punctiformă. Se consideră decupat din acest mediu, un element de volum cilindric, de volum ∆V. Acest element de volum are masa m∆ , axa orientată paralel cu direcŃia de propagare şi este suficient de departe de sursă pentru ca unda să poată fi considerată ca fiind plană. De asemenea elementul de volum este suficient de mic, pentru ca variaŃiile elongaŃiei cu coordonata şi viteza de oscilaŃie său să poată fi considerate ca fiind constante de-a lungul lui.(figura 3.12).
Particulele mediului vor oscila sub acŃiunea undei şi vor avea în fiecare moment energie cinetică şi potenŃială elastică ∆Ec respectiv ∆Ep.
Figura 3.12
Energia cinetică a elementului este dată de expresia
22
2 2c
mv VE
t
ρ ψ∆ ∆ ∂ ∆ = = ∂ (3.77)

43
Datorită deformării elastice, a elementului de mediu, aceasta va avea energia potenŃială elastică dată de relaŃia următoare:
( )2
2p
kE
ψ∆∆ = (3.78)
∆Ψ este deformarea produsă de undă în elementul de volum ∆V şi lungime ∆x şi k constanta elastică a elementului cilindric de mediu. Pentru a afla constanta k, se pleacă de la ecuaŃia legii lui Hooke:
F
ES x
ψ∆=
∆ sau
SEF
xψ= ⋅∆
∆ (3.79)
deci constanta elastică echivalentă a elementului cilindric este:
x
SEk
∆= (3.80)
de unde se deduce pentru energia potenŃială elastică a elementului de mediu :
( )22p
SEE
xψ∆ = ⋅ ∆
∆ (3.81)
Pentru a calcula deformarea ∆Ψ a elementului, se dezvoltă funcŃia elongaŃie în serie Mc.Laurin, şi se face următoarea diferenŃă
( ) ( ) ( ) ( )2 2
2 22 1 2 2 1 12 2
1 10 ... 0 ...
2 2x x x x x x
x x x x
ψ ψ ψ ψψ ψ ψ ψ ψ
∂ ∂ ∂ ∂∆ = − = + + + − + + +
∂ ∂ ∂ ∂
(3.82)
S-a admis că variaŃia elongaŃiei cu coordonata este o constantă (x∂Ψ∂=constant),deci .
xx
ψψ
∂∆ = ∆
∂ (3.83)
Înlocuind (3.83) în (3.81) rezultă pentru energia potenŃială expresia următoare:
( )22
2x
xx
SEE p ∆
∂Ψ∂
∆=∆ (3.84)
Introducând volumul elementului, expresia (3.84) ia forma:

44
2
2p
EE V
x
ψ∂ ∆ = ∆ ∂ (3.85)
Dacă se ia în considerare şi expresia vitezei de fază a undei longitudinale
(3.21),expresia energiei de oscilaŃie a elementului de mediu este următoarea..
2 22
2 2c p
cE E E V
t x
ρ ψ ρ ψ ∂ ∂ ∆ = ∆ + ∆ = + ∆ ∂ ∂ (3.86)
Foarte utilă în rezolvarea diferitelor probleme, este mărimea numită densitate de energie. Densitatea de energie este energia adusă de undă în unitatea de volum, şi se exprimă matematic prin următoarea relaŃie de definiŃie.
E
wV
∆=∆
(3.87)
din relaŃiile (3.86) şi (3.87) rezultă expresia densităŃii de energie a undei elastice,
2 2
2
2w c
t x
ρ ψ ψ ∂ ∂ = + ∂ ∂ (3.88)
Considerând unda ca fiind armonică plană, descrisă de relaŃia
( ) ( ), cos cosx
x t A t kx A tc
ψ ω ω = − = −
şi înlocuind-o în relaŃia (3.88) se obŃine
pentru densitatea de energie expresia.
w= ρω2A2sin2x
tc
ωω −
(3.89)
Se observă că această densitate de energie depinde de distanŃa de la sursă a
elementului ∆V şi diferă de la moment la moment prin intermediul funcŃiei
sin2ω
−c
xt ,
în fiecare moment densitatea de energie având o altă valoare. Receptorii obişnuiŃi nu pot sesiza decât media pe un interval oarecare de timp a
acestei densităŃi de energie şi din acest motiv se va calcula în continuare media într-o perioadă a densităŃii de energie. Medierea va fi simbolizată prin introducere mărimii mediate într-o paranteză ascuŃită.
2 2 2sinx
w A tc
ωρω ω = −
(3.90)

45
deci media în timp a densităŃii de energie va fi determinată de media în timp a funcŃiei ( )kxt −ω2sin . Se va calcula deci media într-o perioadă a acestei funcŃii:
<sin2(ωt-kx)> = ( ) ( ) ( )2 2
0 0
1 1sin sin
T T
t kx dt t kx d t kxT T
ω ω ωω
− = − −∫ ∫ (3.91)
<sin2(ωt-kx)> = ∫π
π
2
0
2sin2
1(ωt-kx)d(ωt-kx) (3.92)
Notând ωt-kx = α (3.93)
∫π
ααπ
=α2
0
22 sin2
1sin d (3.94)
∫ ∫π π ππ
=απ
−απ
=ααπ
−απ
=α2
0
4
0
4
0
2
0
2
2
12sin
8
1
4
12cos
4
1
2
1
2
1sin dd (3.95)
deci valoarea medie a densităŃii de energie va fi:
2 2 2max
1 1
2 2w A vρω ρ= = (3.96)
Deci mediul în care se propagă unda elastică posedă în plus o energie datorată
propagării undei. Amplitudinea interacŃiunilor dintre diferite sisteme fizice nu depinde atât de mărimea energiei care intervine în interacŃiune cât de rapiditatea cu care are loc transferul de energie, deci de puterea care intervine în proces. Puterea dezvoltată într-un proces de propagare ondulatorie este caracterizată o mărime specifică fenomenelor de transport (transport de energie, de masă, de căldură ,sarcină electrică, etc.) denumită flux şi care se defineşte ca fiind cantitatea transportată în unitatea de timp printr-o suprafaŃă. Fluxul de energie a undei este definit ca fiind energia transportată de undă în unitatea de timp printr-o suprafaŃă.
dE
dtΦ = (3.97)
În majoritatea situaŃiilor întâlnite în practică capacitatea undei de a interacŃiona cu
diferita sisteme fizice este caracterizată cantitativ de mărimea numită intensitatea undei. Intensitatea undei se defineşte ca fiind energia transportată de undă în unitatea de timp prin unitatea de arie a suprafeŃei orientate perpendicular pe direcŃia de propagare a undei.
n
EI
S t
∆=∆ ∆
(3.98)
Energia medie transportată de undă prin elementul de mediu este

46
nE w V w S x∆ = ⟨ ⟩∆ = ⟨ ⟩ ∆ (3.98)
n
n
w x SI
S t
∆ ∆=
∆ ∆ (3.99)
Valoarea raportului x
t
∆∆ reprezintă viteza de fază a undei deci relaŃia (3.99) va
lua următoarea formă:
w c t
I w ct
∆= =
∆ (3.100)
Deci I reprezintă densitatea superficială de putere. Înlocuind densitatea medie de
energie cu expresia (3.96) calculată anterior, expresia intensităŃii undei este:
22
2
1AcI ωρ= (3.101)
Intensitatea undei depinde de proprietăŃile oscilaŃiei care se propagă prin mediu
în cadrul procesului ondulatoriu prin mărimile ω şi A dar şi de ale mediului prin constantele ρ şi c. Produsul constantelor de material ρ şi c, se numeşte impedanŃa elastică a mediului.
Z cρ= (3.102) Sensul său fizic după cum o arată şi numele este o rezistenŃă complexă a mediului
la propagarea undei. Notând cu maxV Aω= valoarea maximă a vitezei de oscilaŃie a
elementelor de mediu, intensitatea unde mai poate fi exprimată şi prin relaŃia următoare.
2 2 2max
1 1
2 2I Z A ZVω= = (3.103)
3.5 Reflexia şi refracŃia undelor elastice
Dacă o undă elastică interacŃionează cu suprafaŃa de separaŃie dintre două medii cu impedanŃe elastice diferite, o parte din undă se va reflecta întorcându-se în mediul din care provine, iar o parte se transmite în al doilea mediu schimbându-şi direcŃia de propagare adică, se refractă. Se va considera un front îngust de undă armonică plană(o rază de undă) pe care o vom denumi rază incidentă care cade într-un punct de incidenŃă I, pe suprafaŃa de separaŃie dintre două medii cu impedanŃe elastice Z1 respectiv Z2, şi cu vitezele de fază c1 respectiv c2.
Se va nota cu iA amplitudinea undei incidente, cu rA amplitudinea undei reflectate
şi cu tA amplitudinea undei transmise (refractate).

47
De asemenea se va nota cu i (unghi de incidenŃă) unghiul făcut de direcŃia de propagare a razei de undă cu normala la suprafaŃa de separaŃie în punctul de incidenŃă I, cu 'i unghiul direcŃiei de propagare a razei reflectate cu aceeaşi normală şi cu r unghiul format de raza refractată cu normala. Se consideră că raza incidentă plecată dintr-un punct A pleacă ajunge în I după direcŃia vectorului ir
v, raza având vectorul de undă ik
v(la fel '' ;
iikrvvpentru raza reflectată şi
22 ;krvv pentru raza reflectată).Versorii celor trei direcŃii de propagare sunt , ,i r tξ ξ ξ
r r r ca în
figura 3.13.
Figura 3.13
Se scriu în punctul I ecuaŃia undelor, armonice plane (monocromatice). ( ) cos( )i i i i i ir A t k rψ ω= −
v v (3.104)
' '
'( ) cos(r i r i i ir A t k rψ ω= −
v v) (3.105)
( ) cos( )t i t r r ir A t k rψ ω= −
v v (3.106)
Vectorul de poziŃie a punctului de incidenŃă I este ixri
vv= (3.107)
Se înlocuieşte relaŃia (3.107) în relaŃiile (3.104) , (3.105) şi (3.106) se explicitează, versorii direcŃiilor de propagare şi se obŃin pentru elongaŃiile oscilaŃiilor celor trei raze următoarele relaŃii.

48
2 2( ) cos( ) cos ( cos sin )
2cos( sin ),...( 1, 0)
i i i i i i i i
i i
i i
i
r A t r A t ij ii xi
A t i ii ij
π πψ ω ς ω
λ λ
πω
λ
= − = − − + =
= − = =
v v vv v
vv vv (3.108)
' '0
'
2 2( ) cos( ) cos cos cos )
2cos( sin )
r i r r r i r r
r r
r r
r
r A t r A t i j i i x i
xA t i
π πψ ω ς ω
λ λ
πω
λ
= − = − + =
= −
v v vv v
(3.109)
2 2( ) cos( ) cos (sin cos )
2cos( sin )
t i t t i i t t
t
t t
t
r A t r A t ri rj xit
A t r
π πψ ω ς ω
λ λ
πω
λ
= − = − − =
= −
v v vv v
(3.110)
Pe suprafaŃa de separaŃie particulele mediului oscilează de o parte şi de alta a acesteia cu aceeaşi elongaŃie. Această condiŃie numită condiŃia de continuitate presupune că la limita suprafeŃei de separaŃie, elongaŃia oscilaŃiei rezultante în mediul din care provine unda (deasupra suprafeŃei de separaŃie) să fie egală cu elongaŃia oscilaŃiei produse de undă în mediul în care aceasta trece (sub suprafaŃa de separaŃie).
Din această condiŃie de continuitate rezultă. i r tψ ψ ψ+ = (3.111)
Înlocuind în această condiŃie expresiile celor trei elongaŃii, (3.108), (3.109)şi
(3.110) rezultă:
)sin2
()sin2
cos(sin2
cos '
'
' rxtAixtAixAr
rt
i
ir
i
ii λπ
−ω=λπ
−ω+
λπ
−ω (3.112)
Această egalitate trebuie să fie adevărată pentru orice t şi orice x ceea ce implică
următoarele egalităŃi:
rxtixtixtr
r
i
i
i
i sin2
sin2
sin2 '
'' λ
π−ω=
λπ
−ω=λπ
−ω (3.113)
Această egalitate este satisfăcută doar dacă sunt satisfăcute următoarele egalităŃi =ωi i′ω rω= (3.114),
ceea ce arată că pulsaŃia, perioada şi frecvenŃa undei nu se schimbă prin reflexie şi refracŃie şi,

49
rx
ix
ix
rii
sin2
sin2
sin2
λπ
=′λπ
=λπ
′
(3.115)
Această relaŃie se reduce la alte trei relaŃii după cum urmează:
ii
ii
′λ
′=
λsinsin
; (3.116)
i
i
i
i
′λ
λ=
′sin
sin ; (3.117)
,
,
sin
sini
i
i cT
i c T= (3.118)
dar cum prin reflexie unda se întoarce în mediul din care provine, ii cc ′= deci şi sin i =
sin i’ sau i = i‘ , ceea ce duce la cunoscuta lege a reflexiei. „Unghiul de incidenŃă este egal cu unghiul de reflexie”. Din egalitatea (3.115), se mai obŃine :
ri
ri
λ=
λsinsin
; (3.119)
Tc
Tc
r
i
t
i
r
i =λ
λ=
sin
sin (3.120)
de unde rezultă expresia matematică a legii refracŃiei:
t
i
c
c
r
i=
sin
sin (3.121)
având următorul enunŃ: „raportul dintre sinusul unghiului de incidenŃă şi sinusul unghiului de refracŃie este egal cu raportul vitezelor de propagare a undei în cele două medii (Legea Snell-Descartes)“. De mare importanŃă practică (în acustică şi hidroacustică) să cunoaşterea intensităŃilor undei reflectate şi a celei transmise. Se definesc: „coeficientul de reflexie” R ca fiind raportul dintre intensitatea undei reflectate şi intensitatea undei incidente
i
i
I
IR ′= (3.122)
şi „coeficientul de transmisie# T ca fiind raportul dintre intensitatea undei transmise şi intensitatea undei incidente
i
r
I
IT = (3.123)

50
În continuare se vor calcula aceşti coeficienŃi în cazul incidenŃei normale (i = 0). În condiŃiile existenŃei egalităŃii (3.113) ,condiŃia de continuitate se reduce la
următoarea formă: Ai+Ar = At (3.124)
Legea conservării energiei impune ca intensitatea undei incidente să fie egală cu suma intensităŃilor undelor reflectate şi refractate: rii III += ′ (3.125)
Înlocuind în relaŃia (3.125), expresia intensităŃii din (3.103), rezultă:
222222
2
1
2
1
2
1trriii AzAzAz ω+ω=ω (3.126)
sau, 222
trriii AZAZAZ += (3.127)
Din relaŃiile (3.125) şi (3.127) se formează un sistem din care rezultă Ar şi At după cum urmează.
=−
=+222 )( ttrii
tri
AzAAz
AAA (3.128)
=−
=+
trrii
tri
AzAAz
AAA
)( (3.129)
Zi Ai + Zi Ar = Zi At (3.130) Zi Ai – Zi Ar = Zr At (3.131) 2Zi Ai = (Zi+Zr)At (3.132) deci amplitudinea undei refractate(transmise) este dată de relaŃia:
ri
ii
tzz
AzA
+=2
(3.133)
iar amplitudinea undei reflectate este dată de relaŃia care urmează
i
ri
ri
r Azz
zzA ⋅
+
−= (3.134)
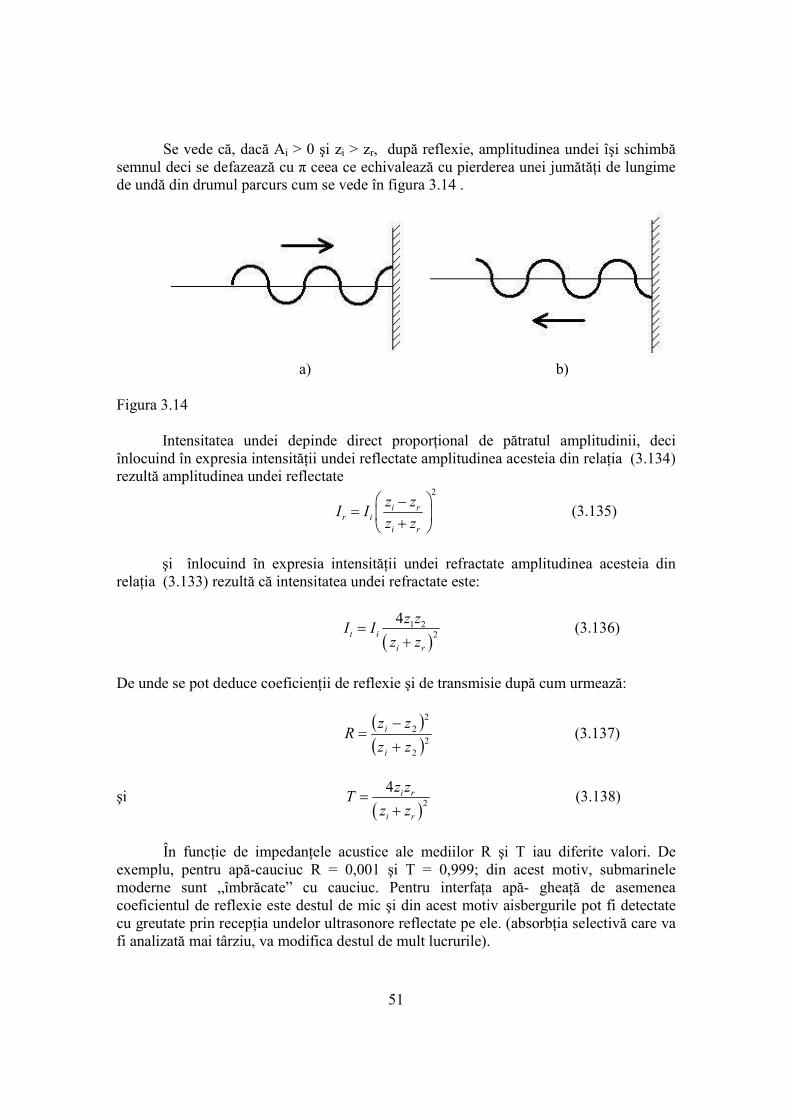
51
Se vede că, dacă Ai > 0 şi zi > zr, după reflexie, amplitudinea undei îşi schimbă semnul deci se defazează cu π ceea ce echivalează cu pierderea unei jumătăŃi de lungime de undă din drumul parcurs cum se vede în figura 3.14 .
a) b)
Figura 3.14
Intensitatea undei depinde direct proporŃional de pătratul amplitudinii, deci înlocuind în expresia intensităŃii undei reflectate amplitudinea acesteia din relaŃia (3.134) rezultă amplitudinea undei reflectate
2
i rr i
i r
z zI I
z z
−= +
(3.135)
şi înlocuind în expresia intensităŃii undei refractate amplitudinea acesteia din
relaŃia (3.133) rezultă că intensitatea undei refractate este:
( )
1 22
4t i
i r
z zI I
z z=
+ (3.136)
De unde se pot deduce coeficienŃii de reflexie şi de transmisie după cum urmează:
( )( )22
22
zz
zzR
i
i
+
−= (3.137)
şi ( )24 i r
i r
z zT
z z=
+ (3.138)
În funcŃie de impedanŃele acustice ale mediilor R şi T iau diferite valori. De
exemplu, pentru apă-cauciuc R = 0,001 şi T = 0,999; din acest motiv, submarinele moderne sunt „îmbrăcate” cu cauciuc. Pentru interfaŃa apă- gheaŃă de asemenea coeficientul de reflexie este destul de mic şi din acest motiv aisbergurile pot fi detectate cu greutate prin recepŃia undelor ultrasonore reflectate pe ele. (absorbŃia selectivă care va fi analizată mai târziu, va modifica destul de mult lucrurile).

52
3.6 Reflexia totală
Un caz aparte de reflexie a undelor este fenomenul de reflexie totală. Acest fenomen apare atunci când o undă provenind dintr-un mediu în care viteza de propagare a undei este mai mică interacŃionează cu suprafaŃa care o separă de un mediu în care viteza sa de propagare este mai mare ca în figura 3.15 .
Figura 3.15
În acest caz raza refractată se depărtează de normală pentru că
v2 >v1 prin legea refracŃiei 2
1
v
v
sin
sin=
r
i impune r > i
Dacă se măreşte unghiul de incidenŃă i, evident r creşte până când la un unghi de
incidenŃă i = l, numit unghi limită, la care unghiul de refracŃie are valoarea r = 2
π.
Dacă unghiul de incidenŃă i creşte şi peste această limită, unda nu mai pătrunde în mediul 2, revine în mediul 1 cu respectarea legii reflexiei, ca în figura 3.16. Acest fenomen poartă numele de reflexie totală.
Unghiul limită se calculează uşor pentru că la limită, i = 1,deci r = 2
π prin
urmare:
2
1
2
1
v
varcsin
v
vsin =⇒= ll (3.139)
Acest fenomen explică mai multe anomalii întâlnite în propagarea sunetelor şi
ultrasunetelor. Sunetul emis de o perturbaŃie puternică se propagă în toate direcŃiile. Undele care se ridică în atmosferă suferă o refracŃie care măreşte continuu unghiul de incidenŃă. La o înălŃime de 50-70 km, la limita superioară a stratosferei, unghiul de incidenŃă devine atât de mare încât are loc o reflexie totală şi unda revine pe pământ la o distanŃă de 150-200 km de sursă.

53
Figura 3.16
Figura 3.16
Unda directă la sol se propagă cel mult 30-50 km din cauza obstacolelor, neomogenităŃilor, aberaŃiei prin vânt, etc. Deci între 50 şi 150 km este o zona de tăcere. Astfel se explică faptul că zgomotul unui bombardament nu se aude la 60 km, dar se aude la 200 m ca în figura 3.16.
3.7 Principiul lui Huygens
Pentru a explica unele fenomene legate de propagarea undelor, astronomul şi
fizicianul olandez Christian Huygens (1690) a postulat următorul principiu: „undele care se propagă în afara unei suprafeŃe închiseΣ care cuprinde în
interiorul ei sursa sunt identice ca efect cu undele care s-ar obŃine suprimând sursa şi înlocuind-o cu surse elementare repartizate în mod convenabil pe suprafaŃa Σ ”.( Figura 3.17)
Deci toate punctele din mediu atinse de undă pot fi considerate ca fiind surse elementare de undă.

54
Figura 3.17
Într-un mediu omogen şi izotrop frontul de unda este o sferă. Fiecare punct de pe aceasta sferă devine la rândul său sursă elementară. Înfăşurătoarea undelor provocate de aceste unde secundare vor crea un nou front de undă ca în figura 3.18.
Figura 3.18
În cazul undelor plane principiul lui Huygens duce la apariŃia unui front de undă plan. In secolul al XIX-lea Fresnel a completat principiu lui Huygens cu afirmatia urmatoare: Toate sursele secundare de pe o suprafata de faza oscileaza in faza, deci ele constituie surse coerente si razele produse de ele produc interferente
3.8 DifracŃia undelor elastice
Prin definiŃie, difracŃia este fenomenul fizic de ocolire aparentă de către undă a obstacolelor. Fenomenul este cu atât mai evident cu cât obstacolele sau fantele întâlnite de undă au dimensiuni mai apropiate de undă. Se întâlnesc doua tipuri de difracŃie:
- difracŃia undelor sferice – provenite dintr-o sursa punctiformă,difracŃia se mai numeşte difracŃia undelor apropiate (difracŃia Fresnel);
- difracŃia razelor paralele – care formează unde plane. Se numeşte difracŃia undelor îndepărtate (difracŃia Fraunhoffer). Fenomenul este destul de uşor explicabil cu ajutorul principiului lui Huygens.
Dacă fanta are lăŃimea AB mult mai mare ca lungimea de undă, se observă că pe frontul de undă AB din fantă “încap” foarte multe centre secundare de oscilaŃii care vor reface un front de undă, având divergenŃa redusă. Ceea mai mare partea energiei transportate de undă se regăseşte într-un fascicul care se propagă perpendicular pe fantă. Reprezentarea grafică a intensităŃii în acest fascicul are o formă de lob alungit şi este denumită lobul

55
principal al diagramei de directivitate al fantei. Pătrunderea undei în zona de umbră este neglijabilă. Intensitatea undei în această regiune este reprezentată printr-o infinitate de lobi de directivitate secundari. (Figura 3.19)
Daca însă fanta are dimensiuni foarte mici AB λ≈ , în zona AB se va găsi un singur centru oscilator care va produce unde sferice care pătrund în zona de umbră. Apare o abatere de la propagarea în linie dreaptă, deci o ocolire aparentă a marginilor fantei. Micşorarea lărgimii fantei face ca această ocolire să devină mai pronunŃată (Figura 3.20 a.,b.)
Fenomenul se observă şi în bazinele portuare când datorită difracŃiei valurile pătrund în bazine, ocolind digurile care limitează pasele.
Figura 3.19
a. b. Figura 3.20 3.9 InterferenŃa undelor elastice
Dacă două unde provenite de la două surse punctiforme diferite se întâlnesc, ele
se vor suprapune, iar oscilaŃiile produse individual de fiecare se vor compune. Fenomenul de suprapunere şi compunere a două unde într-un punct al câmpului
de unde se numeşte interferenŃă. Regiunea în care are loc fenomenul de interferenŃă staŃionară este numit câmp de interferenŃă
Lob principal
Lob secundar
Lob secundar

56
Se va presupune că într-un mediu elastic exista două surse S1 şi S2 care oscilează armonic, dând naştere la unde. Fiecare punct al mediului va fi supus acŃiunii oscilaŃiei armonice provocate de fiecare undă în parte în figura 3.21..
Figura 3.21
În continuare se va deduce ecuaŃia de oscilaŃie a unui punct M, oarecare din câmpul de unde. Punctul M este situat la distanŃa r1 de S1 şi la r2 de S2.
EcuaŃiile celor două elongaŃii sunt: x1 = A1cos(ω t +ϕ 01) şi respectiv x2 = A2cos(ω t + ϕ 02), cele două oscilaŃii având aceeaşi pulsaŃie, dar amplitudini şi faze iniŃiale diferite. Cele două oscilaŃii vor produce unde ale căror ecuaŃii în punctul M vor fi:
x1M = A1cos(ω t +ϕ 01 λ
π− 12 r
) (3.140)
şi respectiv
x2M = A2cos(ω t +ϕ 02 λ
π− 22 r
) (3.141)
Se aplică pentru punctul M principiul suprapunerii micilor mişcări care se enunŃă în felul următor: efectul suprapunerii a două mici mişcări într-un punct este dat de suma efectelor mişcărilor individuale, adică:
xM = x1M + x2M sau:
xM = A1cos(ω t + ϕ 01 λ
π− 12 r
) + A 2cos ( )2 2
02 λ
π−ϕ+ω
rt (3.142)

57
EcuaŃia de oscilaŃie a punctului M va fi dată de : xM = Acos(ω t + ϕ ) unde A este rezultanta compunerii amplitudinilor componente după formula cunoscută:
A= )22
cos(2 202
10121
21
21 λ
π+ϕ−
λ
π−ϕ++
rrAAAA (3.143)
arctg=ϕ)
2cos()
2cos(
)2
sin()2
(
2022
1011
2022
1011
λ
π−ϕ+
λ
π−ϕ
λ
π−ϕ+
λ
π−ϕ
AA
Ar
A
(3.144)
Dacă ϕ 01 + ϕ 02 = constant se spune despre cele două unde că sunt coerente şi
amplitudinea de oscilaŃie a punctului M este constantă în timp. În acest caz interferenŃa este staŃionară. Fără a afecta generalitatea problemei, pentru a reduce numărul de calcule, se va alege cazul particular ϕ 01= ϕ 02; atunci:
A = )(2
cos2 122122
21 rrAAAA −
λπ
++ (3.145)
unde diferenŃa distanŃelor de la surse al punctul considerat, 12 rr − se numeşte diferenŃă de drum.
Se remarcă faptul că dacă 1)(2
cos 12 =−λπ
rr , amplitudinea oscilaŃiei punctului M
va avea un maxim numit maxim de interferenŃă, iar pentru 1)(2
cos 12 −=−λπ
rr un minim
de interferenŃă. CondiŃia de maxim este satisfăcută dacă
2 1
2( ) 2r r k
ππ
λ− = (3.146)
deci se produc maxime de interferenŃă dacă diferenŃa de drum este un multiplu întreg de lungimi de undă un multiplu par de semilungimi de undă
2
212
λ=λ=− kkrr (3.147)
şi condiŃia de minim:
2)12(12
λ+=− krr (3.148)

58
deci se produc minime de interferenŃă ,dacă diferenŃa de drum este un multiplu un multiplu impar de semilungimi de undă
Locul geometric al punctelor care oscilează cu aceeaşi amplitudine se numeşte franjă de interferenŃă (A = constant). O valoare constantă a amplitudinii implică conform relaŃiei (3.////) o valoare constantă a diferenŃei de drum, deci ecuaŃia franjei va fi
(pentru λ = constant): =− 12 rr constant (3.149)
Această ecuaŃie reprezintă în spaŃiu un hiperboloid de rotaŃie cu două pânze
având axa S1S2 drept axă de simetrie. (Figura 3.22)
Figura 3.22
Dând diferite valori lui k se obŃine o familie de hiperboloizi. În plan hiperboloizii se vor reduce la o familie de hiperbole ca în figura 3.23:
Figura 3.23
Fenomenul se întâlneşte în toate domeniile unde se produc fenomene ondulatorii (inclusiv pentru unde electromagnetice).
Fenomenele de interferenŃă ale valurilor în zonele închise (bazine, lacuri, mări închise) produc valuri specifice de interferenŃă care produc multe efecte neplăcute în navigaŃie.
3.10 Unde staŃionare prin reflexie
Se va considera un mediu de propagare unidimensional de lungime l şi impedanŃă elastică, având un capăt în contact un suport fix şi rigid de impedanŃă elastică Z2 (o coardă, tub sonor, ghid de undă, etc). Dacă se perturbă acest mediu (se va considera o

59
perturbaŃie armonică) pe ea se va propaga o undă care va ajunge la capătul fixat unde se va reflecta.( Figura 3.24) Pe acest mediu de propagare unidimensional se vor întâlni două unde, una progresivă dinspre sursă şi una regresivă spre sursă. Între cele două unde apare un fenomen de interferenŃă staŃionară pentru că ele sunt coerente (diferenŃa de fază este constantă).
Figura 3.24
Se pot distinge două cazuri: a) când 2Z al suportului este mai mare decât 1Z a corzii, unda se va reflecta inversându-şi faza cu π ; b) când 12 ZZ < reflexia se face fără inversare de fază.
Se va studia în continuare amplitudinea de oscilaŃie a punctului M situat la distanta x de capătul terminal A: a) 12 ZZ > . Se admite că nu are loc disipare de energie, deci unda reflectată are aceeaşi amplitudine ca şi unda incidentă.
A(x) = )2
(2
cos222 λ−+−+
λπ
++ xlxlaaaa (3.150)
Unda reflectată parcurge drumul SA + SM = l x+ şi cea reflectată SM = l x− ; în plus, datorită reflexiei pe un mediu cu impedanŃa mai mare, are loc un salt de fază unda reflectată parcurgând un drum echivalent mai scurt cu 2λ , deci:
A(x) = 2a )2
2(cos22
)2
2(2
cos1 λ−
λπ
=
λ−
λπ
+xa
x
(3.151)
Se observă că A(x) nu depinde de timp, deci va fi staŃionar, dar depinde de x prin
funcŃia cos ceea ce va face ca A(x) să aibă maxime numite ventre şi minime numite noduri.
PoziŃia punctelor în care se formează ventre, ( MA = 2a ) este aceea în care este satisfăcută condiŃia:
1)2
2(cos ±=λ
−λπ
x (3.152)
această condiŃie se îndeplineşte dacă argumentul este multiplu întreg de π.
π=λ
−λπ
nx )2
2( (3.153)

60
de unde rezultă, 1
( )2 2v
x nλ
= + , n = 0,1,… (3.154)
deci se vor forma două ventre la: ;4
,0λ
== xn ;4
5,2;
4
3,1 21
λ==
λ== xnxn etc.
distanŃa dintre două ventre fiind 2
λ.
PoziŃia nodurilor ( MA = 0 ) este aceea care satisface condiŃia de anulare a amplitudinii.
0)2
2(cos =λ
−λπ
x (3.155)
de unde rezultă ( 1)2nx nλ
= + (3.156)
Se observă că între două noduri se formează un ventru, figurile formate având aspectul de fus. (Figura 3.25)
Figura 3.25
b) Dacă 12 ZZ < ,nu mai are loc reflexie cu schimbare de fază deci termenul
2
λ− din diferenŃa de drum dispare.
Refăcând calculele de la punctul a) vom constata că ventrele se vor forma în locul nodurilor de la punctul a), însă aspectul general nu se va schimba cu nimic.
Acelaşi fenomen se produce şi la propagarea undelor bidimensionale pe membrane sau plăci limitate sau în cazul undelor tridimensionale, în spaŃii limitate. În primul caz nodurile se vor aranja după mai multe curbe numite curbe nodale, iar în cazul undelor tridimensionale se vor aranja pe nişte suprafeŃe unde elongaŃia punctelor este nulă şi care se numesc suprafeŃe nodale.

61
3.11 AbsorbŃia undelor elastice
ExperienŃa arată că, ori de câte ori o undă elastică se propagă într-un mediu,
amplitudinea undei scade. ExplicaŃia acestui fenomen este preluarea energiei transportată de undă de către mediu, şi transformarea acesteia în alte forme de energie (în principal în căldură) datorită frecărilor interne, şi a disipării acesteia prin intermediul conductibilităŃii şi a radiaŃiei termice.
In timpul propagării undei printr-un mediu, particulele care constituie mediul execută oscilaŃii forŃate. Aceste oscilaŃii se fac cu consum de energie deci energia transportată de undă în unitatea de timp prin unitatea de suprafaŃa scade. Se va considera un strat absorbant de lungime L, în care pătrunde o unda cu intensitatea Io, la adâncimea x în material, intensitatea a scăzut la valoarea I(x).(Figura 3.26).
Va fi studiată în continuare legea de scădere a intensităŃii undei într-un mediu, lege numită şi legea fenomenologică a absorbŃiei.
I0 I x x dx
l
Figura 3.26
Se consideră o porŃiune dintr-un mediu de grosime l în care intră o undă cu intensitatea 0I . VariaŃia intensităŃii pe porŃiunea infinitezimală dx va fi:
dIIdII =−− (3.157) Această variaŃie depinde direct proporŃional de lărgimea stratului dx căci cu cât
stratul este mai larg cu atât unda va întâlni mai multe particule care absorb energie. De asemenea d I depinde direct proporŃional şi de intensitatea I a undei căci cu cât aceasta este mai mare, energia cedată particulelor mediului este mai mare.
Deci se poate scrie proporŃionalitatea IdxdI ~− (3.158)
I(x) I-dI

62
pentru a transforma proporŃionalitatea în egalitate se introduce un factor de proporŃionalitate numit coeficient de absorbŃie:
dxIdI µ−= sau dxI
dIµ−= (3.159)
Această ecuaŃie se integrează într limitele impuse de problemă:
0 0
I l
I
dIdx
Iµ= −∫ ∫ (3.160)
Deci 0 0
lnl
I
II xµ= − (3.161)
sau,
0
lnI
lI
µ= − sau 0
lIe
I
µ−= (3.162)
de unde rezultă expresia matematică a legii absorbŃiei. 0
lI I e µ−= (3.163)
Această relaŃie exprimă legea fenomenologică a absorbŃiei undelor ,care se
numeşte legea lui Lambert. Coeficientul de absorbŃie are formă destul de complicată (pentru fluide). Efectele principale care contribuie la absorbŃie sunt frecările interne (vâscozitate)
şi conductivitate termică. Primele contribuie la µ cu un termen µv şi a doua cu un termen µc deci: cv µ+µ=µ
unde;
3
2
3
2
cv ρ
ηω=µ , (3.164)
η este coeficientul de vâscozitate şi ρ densitatea mediului,
iar v
cC
k
c γ−γ
δ
ω=µ
1
2 3
2
(3.165)
unde, v
p
C
C=γ şi k reprezintă coeficientul de conductivitate termică.
Se vede că µ depinde atât de undă (de pulsaŃie) dar şi de mediu. Înlocuind constantele de mediu coeficienŃii de absorbŃie pentru aer şi apă sunt următorii.
2
4 11038,2λ
⋅=µ −cm
(3.166)

63
şi 2
6 11026,5λ
⋅=µapa (3.167)
pentru solide, λ
≈µ1. (3.168)
Se numeşte distanŃă de înjumătăŃire, distanŃa după care intensitatea scade la jumătate.
1 2
1ln2
lµ= − (3.169)
deci
1 2ln 2 0,692
lµ µ
= = (3.170)
Un fenomen interesant este purificarea sunetului prin absorbŃie. Armonicele au
frecvenŃa mai mare deci sunt mai repede absorbite, la distanŃă mare de la sursă dominantă fiind armonica fundamentală. În tabelul următor sunt înscrise valorile distanŃei de înjumătăŃire la diferite frecvenŃe pentru aer şi apă,
FrecvenŃa 1 2l
Aer Apă 435 Hz 100 km 190.000 km 10.000 Hz 179 km 340 km 50.000 Hz 7 km 136 km 100.000 Hz 1,7 km 3,4 km 1.000.000 Hz 0,17 km 34 km
La frecvenŃe foarte mari relaŃiile date pentru µv şi µc nu mai sunt valabile, astfel că
pentru unde ultrasonore între 130.000 Hz şi 400.000 Hz, µ măsurat este dublu. Fenomenul se explică prin oscilaŃii de rezonanŃă ale particulelor mediului. În cazul rezonanŃei moleculelor mediului în care se propagă unda datorită faptului că amplitudinea de oscilaŃie a moleculelor devine foarte mare, absorbŃia de energie de la undă creşte foarte mult.De exemplu, la 3 MHz ultrasunetul este absorbit complet în aer, iar în CO2 deja la 1 MHz.
3.13 Efectul Doppler
Fizicianul austriac Cristian Doppler, studiind comportamentul undelor, a constatat că frecvenŃa undei recepŃionate de un observator aflat în mişcare faŃă de sursă este diferită de frecvenŃa undei emise de aceasta. Acest fenomen se numeşte efect Doppler. Exemplele pot fi nenumărate: dacă un tren se apropie de observator fluierând, se remarcă scăderea frecvenŃei în momentul depărtării acestuia; o navă care este în marş contra valurilor va întâlni valurile mai des, deci frecvenŃa tangajului va fi mai mare decât la nava în repaus etc.

64
Se va calcula în continuare frecvenŃa undei Rv înregistrată de un receptor R în
mişcare relativă faŃă de sursă. Pentru aceasta se va nota cu Sv frecvenŃa undei emise de
sursă, Sω pulsaŃia ei, c viteza de propagare a undei faŃă de mediu şi cu vR viteza de
deplasare a receptorului faŃă de mediu.
3.13.1 Receptorul se depărtează de sursă cu viteza vR.
Se consideră că la momentul t = 0 receptorul se află într-un punct de coordonată x faŃă de un punct fix ales ca punct de referinŃă: Conform ecuaŃiei de transformare a lui Galilei, această coordonată este.
txx R0 v+= (3.180)
EcuaŃia de oscilaŃie a punctului receptor va fi:
)2
cos(),(λπ
−ω=Ψx
tAtx S (3.181)
sau,
( , ) cos( )SS
xx t A t
c
ωωΨ = − , (3.182)
unde înlocuind pe x din (3.180) şi grupând termenii rezultă:
ω−−ω=Ψ
c
xt
cAtx S
00R )v
1(cos),( (3.183)
Deci pulsaŃia recepŃionată va fi exprimată de relaŃia următoare:
)v
1( R
cSR −ω=ω (3.184)
frecvenŃa undei recepŃionate este:
)v
1( R
cvv SR −= (3.185)
deci în acest caz, frecvenŃa undei recepŃionate de receptor este mai mică decât
frecvenŃa undei emise de sursă
SR vv <
3.13.2 Receptorul se apropie de sursă cu vR.
În această situaŃie semnul vitezei se schimbă faŃă de cazul anterior, având expresia:

65
txx R0 v−= (3.186)
deci, )v
1( R
cvv SR += (3.187)
frecvenŃa undei recepŃionate de receptor este mai mică decât frecvenŃa undei emise de sursă SR vv >
3.13.3 Receptorul este imobil, iar sursa se depărtează de el cu vS.
Unda se deplasează faŃă de mediul elastic de propagare cu c, dar şi sursa se deplasează cu vS, deci viteza de deplasare a undei faŃă de sursă va fi viteza relativă
Sv+c , iar distanŃa momentană sursă – receptor va fi:
txx S0 v+= (3.188)
Deci:
+
+ω−ω=Ψ
S
S0
v
)v(cos),(
c
txtAtx S
S (3.189)
se grupează termenii şi se obŃine expresia elongaŃiei undei recepŃionate
+
ω+
+−ω=Ψ
S
0
S
S
v)
v
v1(cos),(
c
xt
cAtx S
S (3.190)
De unde rezultă pulsaŃia undei recepŃionate:
)v
v1(
S
S
+−ω=ωc
SR sau Sv+
ω=ωc
cSR sau
c
SR
Sv1
1
+ω=ω (3.191)
şi frecvenŃa acesteia
c
vv SR
Sv1
1
+= ,
SR vv < (3.192)
3.13.4 Receptorul este imobil, iar sursa se apropie cu vS.
În acest caz txx S0 v−= (3.194)
iar viteza relativă a undei este Sv−c : refăcând în această premisă calculele anterioare se
vor deduce pentru pulsaŃia şi frecvenŃa undei recepŃionate relaŃiile următoare.
c
SR
Sv1
1
−ω=ω (3.195)
sau,

66
c
vv SR
Sv1
1
−= (3.196)
deci SR vv <
3.13.5 Sursa şi receptorul se mişcă cu vS respectiv vR.
Expresia frecvenŃei undei recepŃionate se obŃine generalizând cele patru relaŃii
pentru Rv vom obŃine:
S
R
v
v
±
±=
c
cvv SR (3.197)
unde semnul + se ia pentru vR dacă observatorul se apropie de sursă, iar pentru vS când sursa se depărtează de receptor.
Dacă sursa S şi receptorul R se deplasează pe direcŃii diferite, în relaŃie vor apare 'Rv şi '
Sv adică proiecŃiile lui vR şi vS pe direcŃia SR ca în figura 3.28.
Figura 3.28
Pentru 21
π=α şi
22
π=α nu se observă efect Doppler la undele mecanice.
3.18.2 Propagarea ultrasunetelor în mediul marin şi utilizări în marină
În navigaŃie, ultrasunetele se utilizează pentru determinarea adâncimii cu ajutorul undei ultrasonice, detectarea obstacolelor aflate în apa etc. Pentru aceasta se vor discuta câteva lucruri despre propagarea ultrasunetelor în mediul marin. Evident, legile generale cărora li se supune propagarea ultrasunetelor în mediul marin sunt cele de reflexie, refracŃie, difracŃie, absorbŃie ale undelor, dar va trebui să se
VR
S 1cossV α 2cosRV α R
1α 2α
VS

67
Ńină seama de faptul că mediul marin este un mediu complex care nu poate fi considerat perfect izotrop şi omogen. În primul rând, viteza de propagare a sunetului în apa de mare depinde de mai mulŃi factori locali. Unii autori folosesc următoarea expresie empirică: c = 1480 + 4,21t – 0,037t 2 + 0,0175 h + 1,14 s (3.229) unde: t este temperatura locală;
h este adâncimea locului de propagare; s este salinitatea apei (în g/l).
Fenomenele de reflexie şi refracŃie sunt influenŃate foarte mult de existenŃa curenŃilor care au altă temperatură decât mediul. În acest caz sursa de apă va avea altă densitate, iar c se va modifica, deci impedanŃa acustică Z = ρ · c va fi modificată. Ultrasunetele, întâlnind astfel de mase de apă, se vor reflecta. În unele situaŃii, datorită condiŃiilor locale, se formează la adâncime un strat de impedanŃă acustică mult modificată, care la anumite unghiuri de incidenŃă produce o reflexie totală a undei. Acest strat se numeşte strat de inversiune. Un submarin care se găseşte sub acest strat, devine foarte greu detectabil prin mijloace hidroacustice. Procese complexe de reflexie şi refracŃie apar pe zonele în care există aglomerări de bule de gaz, datorate descompunerilor de substanŃe organice de pe fundul apei. Bancurile de peşti dau de asemenea reflexii puternice permiŃând detectarea lor de către pescadoare.
4.NoŃiuni fundamentale de termodinamică
4.1 Sistem termodinamic
4.1.1 Obiectul termodinamicii
Termodinamica a apărut în secolul al XIX-lea ca urmare a studiilor efectuate pentru a stabili condiŃiile optime de funcŃionare a maşinilor termice. În momentul actual termodinamica nu se limitează doar la studiul fenomenelor termice, căci metodele ei foarte generale pot fi utilizate ori de câte ori avem de studiat sisteme în care intervine mişcarea continuă şi dezordonată a unui număr foarte mare de particule, mişcare numită mişcare termică. Termodinamica clasică studiază sistemele aflate în stare de echilibru şi trecerile de la o stare de echilibru termic la altă stare de echilibru termic. Acest studiu se face pe baza unor postulate şi pe baza a trei principii şi a cunoaşterii experimentale a unor constante de material. În termodinamică nu se face apel la structura microscopică , moleculară, atomică a sistemului studiat, deci termodinamica are un caracter fenomenologic. În cadrul termodinamicii se stabilesc relaŃii între mărimi direct observabile, adică între mărimi măsurabile în experienŃe macroscopice, cum ar fi volumul, presiunea, temperatura, concentraŃia soluŃiilor, intensitatea câmpului electric şi magnetic, etc. Astfel, studiul diverselor procese din termodinamică nu impune cunoaşterea mecanismului fenomenelor ce conduc la procesele respective.

68
4.1.2 Sistem termodinamic, stare, parametrii de stare
Termodinamica operează cu o serie de noŃiuni şi mărimi, cu ajutorul cărora se
defineşte orice proces sau fenomen termic. Una dintre acestea este noŃiunea de sistem termodinamic Prin sistem fizic în general se înŃelege o porŃiune de univers.
Sistemele fizice pot fi alcătuite numai din substanŃă, din câmp, sau din combinaŃii ale acestora.
Un sistem termodinamic se defineşte ca fiind un ansamblu de corpuri delimitate printr-o barieră oarecare de mediul înconjurător. Dimensiunile spaŃiale şi temporale ale acestui sistem trebuie să permită efectuarea unor măsurători pentru a se putea obŃine informaŃii despre el. Sistemele termodinamice pot fi izolate, adică fără o interacŃiune cu mediul, închise, adică există interacŃiune cu mediul fără a exista schimb de substanŃă şi deschise când există şi schimb de substanŃă. Un sistem termodinamic la un moment dat are anumite proprietăŃi, totalitatea acestor proprietăŃi la un moment dat definind starea sistemului. Starea sistemului poate fi caracterizată la un moment de un număr finit de parametrii măsurabili numiŃi parametrii de stare. Ei reprezintă valorile instantanee ale mărimilor fizice ce caracterizează atât sistemul considerat cât şi interacŃiunile dintre sistem şi alte sisteme din mediul înconjurător. Aceştia se împart în parametrii externi care caracterizează poziŃia corpurilor exterioare şi parametrii interni care caracterizează mişcarea şi distribuŃia internă a componentelor sistemului. Alegerea unor mărimi sau altora ca parametrii de stare este o mai mult o problemă de convenŃie. De exemplu pentru caracterizarea stării unui fluid sunt utilizaŃi ca şi parametrii de stare, presiunea şi volumul, mărimi definite şi utilizate în cadrul mecanicii fluidelor şi din acest motiv ei sunt numiŃi parametrii mecanici. Dintre parametrii mecanici, unii cum este de exemplu presiunea depind de forŃele exercitate din exterior asupra fluidului şi se numesc parametrii de forŃă. AlŃi parametrii mecanici, unii cum este volumul depind de poziŃia sistemelor înconjurătoare şi se numesc parametrii de poziŃie. Singurul parametru care nu poate fi definit decât în cadrul termodinamicii este temperatura. Starea de echilibru este termodinamic este starea în care parametrii care caracterizează sistemul în starea de echilibru termodinamic se numesc parametrii termodinamici .Parametrii termodinamici pot fi extensivi care depind de numărul de componente ale sistemului şi intensivi care nu depind de numărul de componente. În cazul în care unii din parametrii de stare se modifică spunem că are loc un proces termodinamic. Aceasta se caracterizează prin trecerea sistemului din starea iniŃială de echilibru în cea finală printr-o succesiune continuă de stări intermediare. Într-un proces termodinamic, unii din parametrii de stare ai sistemului, suferă variaŃii în timp. Stările intermediare ale unui sistem pot să fie sau să nu fie stări de echilibru. Procesele termodinamice se pot desfăşura în aşa fel încât stările intermediare pot fi aproximate ca fiind stări de echilibru, în tot cursul procesului şi în acest caz sunt numite cvasistatice(de echilibru) şi, procese nestatice, pentru care stările intermediare ale sistemului nu pot fi complet caracterizate din punct de vedere al termodinamicii.
Procesele termodinamice pot fi reversibile adică atunci când revenirea din starea iniŃială în starea finală se face fără ca sistemul sau corpurile cu care vine în contact să sufere o variaŃie a stărilor lor. Procesele care nu satisfac această cerinŃă se numesc ireversibile. În natură toate procesele sunt ireversibile, ele putând doar să se apropie mai mult sau mai puŃin de procesele reversibile. Procesele ireversibile sunt guvernate de

69
ecuaŃii care îşi modifică forma atunci când în ele se schimbă semnul timpului. De exemplu transportul de căldură este un proces ireversibil.
Procesele pot fi ciclice când starea iniŃială coincide cu starea finală şi neciclice când starea iniŃială diferă de starea finală.
4.1.3 Postulatele termodinamicii
4.1.3.1 Postulatul lui Boltzman
Dacă un sistem termodinamic este scos din starea de echilibru şi se izolează de mediul înconjurător, atunci el revine de la sine în starea de echilibru în care se menŃine dacă nu suferă o acŃiune externă.
Procesul de revenire în starea de echilibru se numeşte relaxare. Abateri spontane de la echilibru există în orice sistem şi se numesc fluctuaŃii, dar pe măsură ce numărul componentelor sistemului creşte, experienŃa arată că nivelul fluctuaŃiilor scade. Deci postulatul lui Boltzman constituie o restricŃie în sensul că termodinamica poate opera numai cu sisteme cu număr mare de componente. 4.1.3.2 Postulatul al II-lea
Acest postulat se mai numeşte şi postulatul tranzitivităŃii echilibrului termodinamic. Să considerăm 2 sisteme termodinamice A şi B aflate în stare de echilibru termodinamic şi să le punem în contact termic. Se constată experimental că în acest caz cele două sisteme ori rămân în continuare în stare de echilibru ori echilibrul iniŃial se strică, iar după un timp de relaxare oarecare sistemele ajung la o nouă stare de echilibru după ce între sisteme a avut loc un schimb de energie. De asemenea se constată experimental că dacă un sistem A se află în echilibru cu sistemele B şi C se află în echilibru între ele. Această proprietate se numeşte tranzitivitatea echilibrului termodinamic.
Principiul 0 al termodinamicii
Se remarcă din cele arătate mai sus că starea de echilibru este determinată în afară de parametrii externi şi de un parametru intern care are aceeaşi valoare pentru toate sistemele aflate în echilibru termodinamic.
IniŃial sistemele A şi B erau izolate de mediul înconjurător, dar totuşi stările lor difereau prin ceva. Acest ceva a ajuns la aceeaşi valoare după un timp prin transfer energetic. Acest parametru intern care împreună cu parametrii externi caracterizează starea de echilibru se numeşte temperatură empirică şi întrucât caracterizează o stare de echilibru este o mărime de stare.
Deci putem enunŃa următorul postulat: „Există parametrul intern numit temperatură empirică cu următoarea proprietate:
într-un sistem izolat format din mai multe corpuri condiŃia necesară şi suficientă de echilibru este ca temperatura empirică să aibă aceeaşi valoare pentru toate corpurile.“
Temperatura mai mare o are corpul de la care căldura se scurge spre un corp cu temperatură mai mică.
Temperatura caracterizează starea de mişcare a componentelor sistemului. 4.1.3.3 EcuaŃii de stare. Parametrii de stare nu sunt independenŃi, legătura dintre ei se exprimă prin una
sau mai multe relaŃii matematice numite ecuaŃii de stare . În general ecuaŃiile de stare nu

70
poate fi deduse în cadrul termodinamicii. Pentru deducerea lor sunt necesare consideraŃii experimentale sau în unele cazuri ele se pot deduce pe cale statistică (de exemplu teoria cinetico-moleculară).
În cazul unui fluid parametrul intensiv cel mai des utilizat este presiunea p iar parametrul extensiv cel mai utilizat este volumul V. Pentru a caracteriza starea sistemului este necesară precizarea temperaturii T şi a cantităŃii de substanŃă exprimată prin numărul de moli (kilomoli în S.I.) ν. Pentru un fluid ecuaŃia de stare este:
( ), , 0f p V T = (4.1)
Explicitând produsul pV după dezvoltarea în serie se obŃine relaŃia
( ) ( ) ( )
2 31 ...
A T B T C TpV RT
V V Vυ
= + + + +
(4.2)
A se numeşte primul coeficient de virial, B este al doilea coeficient de virial, C al
treilea coeficient de virial etc.. Dacă coeficienŃii de virial sunt nuli ecuaŃia de stare ia forma cunoscută a ecuaŃiei de stare a gazului ideal.
pV RTυ= (4.3) R =8314,34 J/kmol K este constanta universală a gazului ideal. Din această
ecuaŃie se deduce temperatura şi din acest motiv este denumită ecuaŃie termică de stare. Dacă parametrii de stare sunt notaŃi cu x,y,z,. EcuaŃia de stare ia forma . ( ), , 0f x y z = (4.4)
Din diferenŃiala acestei ecuaŃii se pot deduce un set de relaŃii utile în practică,
, ,,
0y z x yx z
f f fdf dx dy dz
x y z
∂ ∂ ∂ = + + = ∂ ∂ ∂ (4.5)
Dacă un proces termodinamic are loc în aşa fel încât un parametru nu se modifică
transformarea care are loc este numită transformare simplă. Dacă z=constant. ,dz=0 şi rezultă:
0y x
f fdx dy
x y
∂ ∂ + = ∂ ∂ (4.6)
sau,

71
y
z
x
f
xy
x f
y
∂ ∂∂ = − ∂ ∂ ∂
(4.7)
În mod identic se pot deduce şi următoarele două relaŃii
x
y
z
f
x z
fz
x
∂ ∂ ∂ = − ∂∂ ∂
(4.8)
şi
y
x
z
f
zy
z f
y
∂ ∂∂ = − ∂ ∂ ∂
(4.9)
Se observă că între cele trei derivate ale parametrilor de stare există următoarea
relaŃie.
1x yz
x y z
y z x
∂ ∂ ∂ = − ∂ ∂ ∂ (4.10)
În cazul particular a unui kmol de gaz ideal, ( ), , 0f p V T pV RT= − = (4.11)
0df Vdp pdV RdT= + + = (4.12) Dacă temperatura este constantă, transformarea este izotermă şi dT=0 : prin
urmare rezultă:
T
p p
V V
∂ = − ∂ (4.13)
Dacă volumul este constant transformarea este izocoră şi dV=0 prin urmare
rezultă:

72
V
p R
T V
∂ = − ∂ (4.14)
Dacă presiunea este constantă transformarea este izobară şi dp=0 : prin urmare
rezultă.
p
V R
T p
∂ = − ∂ (4.15)
Se observă că este satisfăcută relaŃia dedusă anterior pentru cazul general
1T pV
p T V p V R
V p T V R p
∂ ∂ ∂ = − − − = − ∂ ∂ ∂ (4.16)
4.1.3.4. CoeficienŃi termodinamici Derivatele parŃiale din relaŃiile anterioare se pot interpreta foarte simplu şi
reprezintă coeficienŃii termodinamici ai corpurilor. RelaŃiile dintre aceşti coeficienŃi. permit obŃinerea unor legături intre mărimi fizice care pot fi deduse, experimental, fără a cunoaşte forma explicita a ecuaŃiei de stare. În multe probleme aplicative, prezintă interes următorii coeficienŃi termodinamici.
1.Coeficientul termic de dilatare în volum
0
1
p
V
V Tγ
∂ = ∂ (4.17)
2. Coeficientul termic al presiunii
0
1
V
p
p Tβ
∂ = ∂ (4.19)
3. Coeficientul de comprimare izotermă
0
1
T
Vk
V p
∂= − ∂
(4.19)
Dacă se Ńine cont de relaŃia (4.10) rezultă:

73
00 0
1 11
p TV
V T pV
T p V p kVγ
β ∂ ∂ ∂ = − = − ∂ ∂ ∂
(4.20)
deci între aceşti coeficienŃi se stabileşte relaŃia următoare. 0p kγ β= (4.21)
4.3 Primul principiu al termodinamicii
4.3.1 Energia internă
Un sistem termodinamic este alcătuit dintr-un număr foarte mare de componente (particule). Aceste particule se află într-o continuă mişcare dezordonată, deci în fiecare moment au o energie cinetică. De asemenea, între particule se manifestă forŃe de interacŃiune care provin din energii potenŃiale de interacŃiune.
Energia internă U a unui sistem este suma energiilor cinetice (de rotaŃie, translaŃie, vibraŃie) şi potenŃiale ale tuturor particulelor. Energia internă nu poate fi calculată în cadrul termodinamicii, care după cum s-a arătat face abstracŃie de existenŃa şi de mişcarea particulelor constituente ale sistemului. Energia internă este o funcŃie de stare. Determinarea funcŃiilor de stare deci şi a energiei interne se face în raport cu un sistem de referinŃă dat. În acest sistem de referinŃă energiei interne îi se atribuie o valoare de referinŃă şi se vor putea determina doar variaŃii ale sale în raport cu această valoare. Prin urmare energia internă poate fi definită doar până la o constantă arbitrară.
Energia internă fiind o mărime de stare, conform postulatului 2 va depinde doar de parametrii externi pe care vor fi notaŃi cu ai şi de temperatura T.
U = U(ai; T) (4.24) În cazul unui fluid ai = V, deci U = U(V;T) (4.25) EcuaŃia termică de stare permite exprimarea valorii unui parametru de stare în
funcŃie de ceilalŃi doi. Deci energia internă poate fi exprimată şi prin relaŃiile U=U(p,T) sau U=U(p,V)
Această ecuaŃie, indiferent de forma sa este numită ecuaŃia calorică de stare (din ea se pot deduce mărimi calorice precum căldurile specifice, călduri latente etc.).
La toate sistemele (fac excepŃie sistemele de spini nucleari la unele cristale) energia internă creşte odată cu creşterea temperaturii.
4.3.2 Lucrul mecanic
Dacă sistemul termodinamic primeşte sau cedează energie mediului înconjurător în aşa fel încât să aibă loc o deplasare a corpurilor înconjurătoare, se spune că sistemul a efectuat un lucru mecanic.

74
Dacă se consideră un proces cvasistatic ,adică un proces în care toate stările intermediare sunt stări de echilibru şi care prin urmare se poate reprezenta grafic, şi dacă se notează cu bj parametrii intensivi (interni) de forŃă şi cu ai parametrii extensivi (externi), lucrul mecanic într-un proces infinitezimal, δL va fi:
∑ ⋅=δ
i
ii dabL (4.26)
Sumarea se face după i – numărul contactelor cu mediul. Pentru un proces cvasistatic:
∑∫ ⋅=i c
ii dabL (4.27)
integrala luându-se în lungul curbei de transformare.
Integrala efectuându-se pe această curbă, rezultatul (L) va depinde de forma curbei (în cazul general), deci mărimea lucrului mecanic depinde de tipul transformării, şi din acest motiv se afirmă că lucrul mecanic este o mărime de proces.
Dacă sistemul este un fluid şi transformarea este descrisă de funcŃia p=p(V), reprezentată în diagrama pV din figura 4.1,,pentru o variaŃie infinitezimală a volumului dV se poate considera p = constant şi lucrul mecanic efectuat în transformarea infinitezimală de la V la V+dV este. L pdVδ = (4.28) Figura 4.1 Deci lucrul efectuat în transformarea de la V1 la V2 este:
∫=2
1
V
V
pdVL (4.29)
unde p = p(V,T). Se observă că L reprezintă aria figurii de sub grafic. Dacă se schimbă tipul transformării, forma curbei p(V) se modifică, schimbându-
se şi forma şi aria figurii de sub grafic, ceea ce ne arată că într-adevăr lucrul mecanic este o mărime de proces depinzând de tipul transformării. Folosim semnul δL şi nu dL tocmai pentru a simboliza acest lucru.
Pentru procese izoterme ale gazului ideal (T = ct): Din ecuaŃia termică de stare se explicitează presiunea
V1 V+dV V2 V
p p(V)

75
p = V
RTν; iar lucrul mecanic este.
1
2ln2
1
2
1V
VRT
V
dVRTdV
V
RTL
V
V
V
V
T ν=ν=ν
= ∫∫ (4.30)
Pentru procese adiabatice ale gazului ideal între presiune şi volum se stabileşte relaŃia lui Poisson, care permite exprimarea presiunii:
γγ = 11VppV ; γ
γ
=V
Vpp 11 (4.31)
Lucrul mecanic efectuat la destinderea de la V1 la V2 este:
( )
−
−γν
=
−
−γ=−
γ−==
−γ−γ
γ−γ−γ
γ ∫1
2
11
1
2
11111
12
1111 1
11
11
2
1V
VRT
V
VVpVV
Vp
V
dVVpL
V
V
S (4.32)
Pentru procese izocore ale gazului ideal, volumul se menŃine constant, deci dV = 0; şi Lv = 0 (4.33)
Semnul algebric a lucrului mecanic se atribuie în conformitate cu următoarea convenŃie: Lucrul mecanic absorbită de sistem este negativ iar lucrul mecanic cedat de sistem este pozitiv.
0
0absorbit
cedat
L
L
⟨
⟩ (4.34)
4.3.3 Căldura
Numim căldură şi o vom nota cu Q energia schimbată de un sistem cu mediul atunci când parametrii externi nu se modifică.
Transferul de căldură are loc prin mişcarea dezordonată a moleculelor. Fiind o formă de energie, unitatea de măsură a căldurii este1 J, dar în tehnică se
mai foloseşte şi o unitate tolerată denumită calorie care este definită ca fiind căldura necesară unui gram de apă pentru a-şi ridica temperatura de la 19,50C la 20,50C. Căldura absorbită sau cedată de un corp depinde de variaŃia de temperatură, de masa şi de natura substanŃelor care alcătuiesc corpul. Pentru a caracteriza dependenŃa căldurii de material se introduc constantele de material numite mărimi calorice. Printre mărimile calorice cele mai utilizate sunt capacităŃile calorice. Acestea sunt mărimi caracteristice unui anumit sistem într-un proces dat.
Dacă se notează cu ∆Q căldura schimbată de sistem pentru a avea loc o schimbare de temperatură ∆T, capacitatea calorică a sistemului S în procesul Π se defineşte prin relaŃia.
limS
T o
QC
TΠ
Π∆ →
∆=
∆ (4.35)

76
Capacitatea calorică depinde de dimensiunile şi natura sistemului şi într-o măsură mai mică de temperatură. În cazul fluidelor în practică sunt des utilizate căldurile molare care sunt capacităŃi calorice corespunzătoare unui kmol din respectivul fluid. Căldura molară în procesul Π este definit prin relaŃia următoare.
1 Q
CTυΠ
Π
∂ = ∂ (4.36)
Căldura schimbată în procesul Π este
( )Q C T dTυΠ ΠΠ
= ∫ (4.37)
Dacă procesul este izocor, sistemul nu efectuează lucru mecanic şi întreaga căldură schimbată este folosită de sistem pentru schimbarea energiei interne În acest caz se defineşte căldura molară izocoră, prin următoarea relaŃie.
1
V
V
QC
Tυ∂ = ∂
(4.38)
Dacă procesul este izobar, sistemul efectuează lucru mecanic şi căldura schimbată de sistem este folosită pentru schimbarea energiei interne şi pentru efectuarea lucrului mecanic. În acest caz se defineşte căldura molară izocoră, prin următoarea relaŃie.
1
p
p
QC
Tυ∂ = ∂
(4.39)
În cazul sistemelor termodinamice alcătuite din solide sau lichide, este convenabil
ca raportarea căldurilor molare să se facă la masa sistemului. În acest caz se defineşte căldura specifică izocoră respectiv izobară, prin următoarele relaŃii.
1
V
V
Qc
m T
∂ = ∂ (4.40)
şi
1
p
p
Qc
m T
∂ = ∂ (4.41)
În cazul din solidelor şi a lichidelor variaŃiile de volum sunt foarte mici, lucrul efectuat este neglijabil şi din acest motiv cu o bună aproximaŃie nu se face distincŃie între cele două călduri specifice. Semnul algebric a căldurii se atribuie în conformitate cu următoarea convenŃie: Căldura absorbită de sistem este pozitivă iar căldura cedată de sistem este negativă.

77
0
0absorbit
cedat
Q
Q
⟩
⟨ (4.42)
4.3.4 Principiul I al termodinamicii. Formulări ale principiului I al termodinamicii
Dacă sistemul primeşte de la sisteme exterioare cu care se află în contact energie sub formă de caldură şi lucru mecanic, conform legii conservării energiei se va produce variaŃia energiei interne.
Lucrul mecanic depinde în general de tipul transformării, dar s-a observat că în toate cazurile fără excepŃie, pentru un proces adiabatic el nu depinde de modul cum are loc procesul, ci doar de starea finală şi cea iniŃială. În acest caz însă
dU = dL, (4.43) La trecerea din starea iniŃială i în starea finală f lucrul mecanic este:
f
i f f i
i
L dL U U→ = = −∫ (4.44)
Din punct de vedere matematic aceasta implică faptul că în cazul unui sistem izolat lucrul mecanic elementar este o diferenŃială totală exactă. Prin urmare şi variaŃia energiei interne ∆U nu depinde decât de starea finală şi de cea iniŃială. Această constatare se poate enunŃa în felul următor:
„VariaŃia energiei interne a unui sistem termodinamic nu depinde decât de starea
finală şi de cea iniŃială fiind independentă de stările intermediare prin care trece sistemul.“
Într-o transformare ciclică starea iniŃială coincide cu starea finală, deci:
∫ = 0dU . (4.45 )
În matematică se demonstrează că dacă integrala curbilinie pe un contur închis a
unei funcŃii este nulă, diferenŃiala acestei funcŃii este o diferenŃială totală exactă, rezultatul integrării nu depinde de drumul de integrare (de procesul care are loc) deci energia internă este o funcŃie de stare.
Principiul I mai poate fi enunŃat punând condiŃia ca oricând dU să fie o diferenŃială totală exactă:
dU = dyy
Udx
x
U
∂∂
+∂∂
; (4.46)
dU = M(x,y)dx + N(x,y)dy (4.47)
formă sub care se exprimă uneori principiul I al termodinamicii. Dacă se ridică restricŃia de izolare i f f iL U U→ ≠ − (4.48)

78
Deci lucrul mecanic elementar nu mai este o diferenŃială totală exactă, diferenŃa dintre f iU U− şi i fL→ fiind căldura schimbată în procesul care are loc la trecerea de la i la
f. if f i ifQ U U L= − − (4.49)
Dacă trecerea are loc dintr-o stare în una infinit apropiată, relaŃia (4.49) ia
următoarea formă. Aceasta este forma matematică sub care se exprimă cel mai des principiul I al termodinamicii.
dU Q Lδ δ= + (4.50) O altă formulare evidentă a principiului I al termodinamicii este următoarea: „nu
se poate construi o maşină termică care să efectueze lucru mecanic fără a absorbi
căldură sau o altă formă de energie(nu se poate construi un perpetum mobile de speŃa
I).“ Într-adevăr conform principiului I al termodinamicii: LQU −=∆ . Dacă
transformarea este ciclică 0=∆U , deci Q = L, deci pentru Q = 0⇒ L = 0. Dacă sistemul este deschis mai apare în plus o energie de transport τ cedată sau
absorbită de sistem prin transportul de masă, deci: τ+−=∆ LQU . (4.51)
4.4 Principiul al II-lea al termodinamicii
În conformitate cu primul principiu lucrul mecanic şi căldura sunt amândouă forme de energie, dar între ele există o diferenŃă calitativă importantă. Lucrul mecanic se transformă în căldură foarte uşor şi integral, pe când căldura se poate transforma în lucru mecanic doar în nişte instalaŃii speciale numite motoare termice şi doar în mod parŃial. În schimburile de căldură un rol deosebit îl are temperatura, schimbul de căldură făcându-se doar de la sistemul cu temperatura mai mare la cel cu temperatura mai mică. În sec. al XIX–lea când s-a extins utilizarea maşinilor cu aburi, randamentul lor definit ca:
1Q
L=η (4.52)
era foarte mic. (L reprezintă lucrul mecanic util produs de maşină iar Q1 căldura absorbită de la o
sursă de căldură;)Dacă se notează cu Q2 căldura cedată de maşină unei surse reci, lucrul mecanic dezvoltat este egal cu suma algebrică a acestor două călduri deci, randamentul se mai poate exprima Ńi sub forma următoare.
1 21 2
1 1
Q QQ Q
Q Qη
−+= = (4.53)
Inginerul francez Sadi Carnot şi-a propus să studieze posibilitatea îmbunătăŃirii acestui randament. El a enunŃat următoarea teoremă

79
Raportul dintre căldurile Q1 şi Q2 schimbate de un sistem termodinamic, într-o
transformare ciclică reversibilă este o funcŃie universală de temperaturile celor două surse.
( )11 2
2
,Q
T TQ
ϕ= (4.54)
Carnot a conceput un ciclu reversibil care-i poartă numele, format din 2 izoterme
şi două adiabate. Pe izoterma 1-2 fluidul de lucru este în contact cu sursa caldă de temperatură T1 şi absoarbe de la aceasta căldura 1Q şi se destinde izoterm. Urmează
destinderea adiabatică 2-3 după care sistemul este pus în contact cu sursa rece de temperatură T2 , căreia îi cedează căldura 2Q în comprimarea izotermă 3-4. Sistemul
revine în starea iniŃială prin comprimarea adiabatică 4-1, ca în figura 4.2
Figura 4.2 Randamentul ciclului Carnot este independent de substanŃa de lucru utilizată şi
este dependent doar de temperatura T1 a sursei calde şi T2 a sursei reci, conform teoremei lui Carnot, enunŃată anterior, Prin calcule simple se ajunge la expresia randamentului ciclului Carnot:
1
21
Q
QQ −=η =
1
21
T
TT − (4.55)

80
Ciclul Carnot are un caracter ideal; o maşină termică reală funcŃionând cu foarte multe pierderi, ciclurile reale sunt cicluri ireversibile care au un randament mai mic decât un randament Carnot.
Analizându-se ciclul Carnot şi expresia randamentului său s-a ajuns la concluzia că el exprimă o realitate impusă de natură care nu poate fi demonstrată în cazul termodinamicii, deci trebuie acceptată cu titlu de principiu.
4.4.1 Formulările principiului al II –lea al termodinamicii
Acest principiu a fost formulat în mai multe feluri, chiar teorema lui Carnot fiind o astfel de formulare. Aceasta formulare se poate exprima cantitativ prin relatia:
1
21
1
21
T
TT
Q
QQ −=
− (4.56)
4.4.1.1 Formularea lui Thomson (Lord Kelvin) Într-o transformare ciclică monotermă sistemul nu poate ceda lucru mecanic
mediului exterior. Dacă transformarea ciclică este şi ireversibilă, sistemul absoarbe lucru mecanic de la mediul exterior.
cu entropia absolută. 4.4.1.3 Formularea lui Clausius
Nu este posibilă o transformare care să aibă ca rezultat trecerea de la sine a căldurii de la un corp rece la un corp mai cald.
4.4.2 Căldura redusă. Entropia în procese reversibile
S-a văzut că principiului II poate fi exprimată cantitativ prin relaŃia:
1
21
1
21
T
TT
Q
QQ −=
− (4.62)
Dar în termodinamică, ca urmare a convenŃiei de semne adoptate, Q 2 < 0. Deci:
1
21
1
21
T
TT
Q
QQ −=
+ (4.64)
de unde rezultă
1
2
1
2
T
T
Q
Q−= (4.65)
sau,
1
1
2
2
T
Q
T
Q−= (4.66)
de unde se obŃine
02
2
1
1 =+T
Q
T
Q (4.67)

81
Raportul T
Q se numeşte căldură redusă.
Se impune concluzia într-un ciclu Carnot suma căldurilor reduse este nulă. Se va studia în continuare suma căldurilor reduse într-o transformare ciclică
reversibilă oarecare. Se consideră o transformare ciclică reversibilă ABCDA descompusă într-o infinitate de cicluri Carnot infinit de mici de tipul a.b.c.d.a. Se observă că laturile ciclurilor infinitezimale din interiorul lui ABCDA se parcurg de două ori, rămânând doar izotermele şi adiabatele externe parcurse o singură dată ,care formează o linie frântă. La limită acesta linia coincide cu conturul ciclului ABCDA.(Figura 4.4a,b.)
La fiecare ciclu Carnot elementar suma căldurilor reduse va fi nulă: Notând cu
iQ1δ căldura absorbită pe ciclul elementar i şi cu iQ2δ cea cedată ,prin
însumare pe toate ciclurile elementare se obŃine relaŃia
a) b)
Figura 4.4
∑ =+i i
i
i
i
T
Q
T
Q0)(
2
2
1
1 δδ (4.68)
. Ciclurile elementare fiind infinit de apropiate, T variază continuu şi pe întreg
ciclul ABCDA suma se transformă într-o integrală de contur. Deci pentru un proces ciclic reversibil oarecare putem scrie:
∫ = 0T
Qδ (4.69)
Integrala de contur a mărimii T
Qδ fiind nulă, ea poate fi considerată ca
diferenŃiala totală exactă a unei mărimi de stare S numită entropie:

82
T
QS
δδ = (4.70)
Deci pentru un ciclu reversibil:
∫ = 0dS (4.71)
RelaŃia poartă numele de relaŃia lui Clausius. Dacă transformarea este reversibilă, dar nu ciclică, ci are loc dintr-o stare A într-o stare B se poate scrie următoarea relaŃie:
∫=−B
A
ABT
dQSS (4.72)
S fiind o diferenŃială totală exactă, diferenŃa AB SS − nu depinde de tipul transformării, deci entropia este o mărime de stare.
DefiniŃia entropiei s-a făcut prin T
QS
δδ = . Dacă integrează această relaŃie:
CT
QdS +=∫ ∫
δ (4.73)
de unde se vede că entropia poate fi definită doar până la o constantă arbitrară care nu poate fi determinată în cadrul termodinamicii.
Nu putem calcula în cadrul termodinamicii entropia sistemului într-o stare dată, ci numai variaŃia sa.
4.4.3 Principiul II al termodinamicii pentru procese ireversibile
Să considerăm un proces prin care sistemul izolat trece din starea 1 în starea 2 printr-un proces necvasistatic, reversibil şi revine în 1 printr-un proces cvasistatic reversibil. S-a parcurs deci un ciclu ireversibil (conŃine procesul 1-2). Procesul este reprezentat prin zona haşurată pentru că procesele necvasistatice nu conŃin stări intermediare de echilibru şi nu pot fi reprezentate prin puncte.
Figura 4.5 S-a arătat că pentru transformări ciclice ireversibile randamentul ciclului este mai
mic decât randamentul Carnot: cηη ≤ deci,

83
1
12
1
21
T
TT
Q
QQ −≤
− sau, (4.74)
02
2
1
1 ≤+T
Q
T
Q (4.75)
RelaŃia poate fi generalizată prin metoda arătată la paragraful anterior în felul următor:
∫ ≤ 0T
dQ (4.76)
Această relaŃie se numeşte inegalitatea lui Clausius. Ca o consecinŃă a acestei inegalităŃi, pentru transformarea reprezentată in figura
4.5, se poate scrie următoarea relaŃie
∫ ∫∫− −
≤+=21 12
0T
dQ
T
dQ
T
dQ (4.77)
Procesul 2-1 fiind cvasistatic:
∫−
−=12
21 SST
dQ (4.78)
∫−
≤−+21
21 0SST
dQ sau , (4.79)
S ∫−
≥−21
12T
dQS (4.80)
Dacă sistemul este izolat procesul nestatic este adiabatic , atunci căldura schimbată în acest proces este nul 021 =−Qδ
Deci: ∫−
=21
0T
dQ (4.81)
de unde rezultă S 012 ≥−S (4.82)
Se obŃine următorul rezultat important: pentru un sistem izolat, într-o
transformare irevesibilă entropia stării finale este mai mare decât entropia stării iniŃiale. Deci transformarea ireversibilă poate avea loc doar într-un singur sens şi anume în
sensul creşterii entropiei. Principiul II se mai putem enunŃa astfel: entropia sistemelor izolate rămâne constantă în cazul proceselor reversibile şi creşte în cazul proceselor ireversibile.

84
4.5 Formula fundamentală a termodinamicii
În conformitate cu principiul I al termodinamicii s-a constatat că energia internă a sistemului termodinamic se poate modifica prin schimb de caldură sau de lucru mecanic cu mediul.
dU = LQ δ−δ (4.99) Pe baza formulării Clausius a principiului II pentru procese cvasistatice se poate
scrie:
dS = T
Qδ (4.100)
deci: TdSQ =δ
dU = TdS – δL (4.101) RelaŃia (4.99) este valabilă pentru procese de orice fel, pe când (4.101) este
valabilă doar pentru procese cvasistatice reversibile. După cum s-a arătat, expresia lucrului mecanic depinde de procesul care are loc
cum rezultă din exemplele următoare..
a) Într-o deformare elastică a unui corp de volum iniŃial V )( zzyyxxzyx ddddzdydxVL γτ+γτ+γτ+σ+σ+σ=δ (4.102)
unde σ şi τ sunt dilatările unghiulare. b) Într-o modificare a suprafeŃei peliculei superficiale Ωσ=δ dL unde σ este aici
tensiunea superficială normală la elementul de arc al curbei care mărgineşte suprafaŃa fluidului.
c) Lucrul forŃelor elastice VEdDdDEdDEdDEVL Zzyyxx =++=δ )( (4.103)
unde E reprezintă intensitatea câmpului electric, iar D vectorul inducŃie electrică. d) Lucrul forŃelor magnetice
VHdBdBHdBHdBHVL zzYyXx =++=δ 0(
unde H este vectorul intensitate a câmpului magnetic, iar B reprezintă vectorul inducŃie a câmpului magnetic.
e) Într-un sistem cu S componente în care numerele de kmoli νk suferă variaŃiile dνk:
1
S
k k
K
L dvδ µ=
=∑ (4.104)
unde νk sunt numerele de kmoli, iar kµ se numesc potenŃiale chimice.
Se remarcă faptul că lucrul mecanic se calculează după cum rezultă din relaŃia (4.26) prin produsul unor mărimi intensive bk numite forŃe generalizate cu diferenŃialele unor mărimi extensive dak care sunt numite coordonate generalizate deci:

85
1
n
k k
k
L b daδ=
=∑ (4.105)
Prin urmare relaŃia devine dU = TdS +1
m
k k
k
b da=∑ (4.106)
Această relaŃie fiind o unificare a expresiilor matematice ale principiului I şi II se numeşte formula fundamentală a termodinamicii pentru procese cvasistatice.
Pentru un gaz ideal coordonata generalizată este volumul V şi forŃa generalizată este -p. Deci: dU = TdS – pdV (4.107)
Pentru procese nestatice ireversibile în virtutea inegalităŃii lui Clausius care guvernează aceste procese:
dU < TdS – Lδ (4.108)
dU≤TdS +1
m
k k
k
b da=∑ (4.109)
pentru ambele tipuri de procese unde semnul „=” este valabil în cazul proceselor cvasistatice reversibile.
4.6 Principiul al treilea al termodinamicii 4.6.1 Formulări ale principiului al treilea al termodinamicii În cursul lucrărilor experimentale cu privire la capacitatea substanŃelor de a
reacŃiona între ele (afinitate chimica), chimistul german Nernst a observat că odată cu scăderea temperaturii se produce şi o scădere a căldurii specifice. Această comportare a căldurii specifice a fost considerată de Nernst o manifestare a unei legi naturale care nu poate fi demonstraăa, dar care se manifestă de fiecare dată.
Acestei concluzii i s-a dat rang de principiu si a fost denumita principiu al treilea al termodinamici. Unii autori nu considera principiu 3 ca un principiu al termodinamicii pentru ca el nu introduce o mărime de stare ca celelalte trei principii (principiul 0 introduce temperatura empirică θ , principiul 1 introduce energia internă U, iar principiul 2 introduce entropia S). Ca şi celelalte principii şi principiul 3 are mai multe formulări. Formularea lui Nernst La 0K căldura specifică este egală cu 0.De aici concluzia ca la 0K nu poate avea loc nici un transfer de căldură .Deci este imposibil ca o maşina termica sa funcŃioneze la T2=0k, şi prin urmare este imposibilă realizarea unei maşini termice cu randamentul 1. Formularea lui Planck Dacă temperatura termodinamică a unui sistem tinde la 0K, entropia sa tinde către o
valoare constantă care nu depinde de valorile celorlalte mărimi de stare.
Planck a arătat ca dacă 0T → nu numai 0S∆ → ci chiar S 0→ deci S0=0 Prin acesta se stabileşte o origine in măsurarea entropiilor.

86
Este evident cele doua formulări sunt echivalente .Notând cu C este capacitatea calorica a sistemului, entropia sa se exprimă prin relaŃia următoare:
S=0
TdT
CT∫ (4.110)
Daca 0T → este necesar ca 0C → deci cele doua formulări sunt echivalente. Formularea prin inaccesibilitatea temperaturii de 0 K Prin nici un proces nu se poate atinge 0 K. Aceasta formulare este echivalentă cu celelalte formulări. Pentru a demonstra aceasta echivalenŃă se va considera un ciclu Carnot în coordonate T-S. Figura.4.7 In acest caz izotermele T=constant vor fi paralele cu axa S iar adiabatele paralele cu axa T ( Q TdSδ = ; în adiabată , 0 0Q TdSδ = ⇒ = deci pentru T constant dS=0 şi S=constant) Pentru a demonstra inaccesibilitatea temperaturii de 0 K se va considera prin absurd că procesul are loc în aşa fel încât T2=0K.În acest caz ciclul Carnot va fi reprezentat ca în figura 4.7 Figura. 4.8
Pe transformarea izotermă1-2 se absoarbe căldura Q12 pe transformările 2-3 şi
4-1 nu există schimb de căldură ele fiind adiabatice. Pe izoterma 3-4 nu există schimb de căldură căci ea se desfăşoară la T=0K şi conform formulării lui Nernst aici căldura molară este nulă. În consecinŃă s-a realizat un ciclu Carnot în care se efectuează lucru
T T1=constant
T2=constant
Q=0
1 2
4 3
Q=0
S
T1=constant
1
S
2
T

87
mecanic fără a se ceda căldură (transformare ciclică reversibilă monotermă).Această situaŃie vine în contradicŃie cu principiul al doilea al termodinamicii. Deci s-a ajuns la o contradicŃie care a apărut datorită faptului că s-a presupus accesibilitatea temperaturii 0K.
4.6.2 Temperatura absolută negativă
Principiul 2 al termodinamicii a permis definirea unei scări termodinamice de temperaturi care au punctul de origine la 0K şi creşte in sens pozitiv la +infinit. Pentru unele sisteme energia internă tinde către o valoare constantă. Să presupunem că avem un sistem pentru care U=constant. Daca-i se comunică o energie suplimentară din exterior, energia sa internă creşte în continuare, temperatura sa fiind mai mare. Aceasta poate fi interpretată ca un salt la –infinit fără a atinge temperatura de 0K.( figura.4.9)
Figura.4.9 In cazul temperaturilor absolut negative s-a demonstrat ca orice căldură se poate transforma integral în lucru mecanic pe când lucrul mecanic nu se poate transforma integral în căldură. Deci în raport cu OK lucrul mecanic si căldura devin complementare.
4.7 Metodele termodinamicii Pentru a aplica principiile termodinamicii la rezolvarea diferitelor probleme teotetice şi practice s-u elaborat două metode de lucru.
4.7.1 Metoda ciclurilor Această metodă, prima în ordinea apariŃiei constă in rezolvarea problemei alegând
în mod convenabil un ciclu reversibil.căruia îi se aplică primul principiu sub forma
ciclu
L dQ= ∫ (4.111)
şi principiul al doilea sub forma:
0ciclu
dQ
T=∫ (4.112)
T
Energia

88
Această metodă este aplicabilă pentru rezolvarea oicărei probleme de termodinamică dar succesul rezolvării depinde de modul de alegere a ciclului.
4.7.2 Metoda potenŃialelor termodinamice Aceasta este o metodă de lucru analitică elaborată de Gibbs .Formula fundamentală a termodinamicii dU TdS Lδ= − (4.113)
permite ntroducerea unor funcŃii de stare, numite potenŃiale termodinamice, ale căror variaŃii elementare sunt diferenŃiale totale exacte. Cunoaşterea acestor potenŃiale permite deducerea ecuaŃiilor termice şi calorice de stare,precim şi a unor coeficienŃi termodinamici. Prin funcŃii termodinamice caracteristice se înŃeleg acele funcŃii de stare ale unui sistem termodinamic a căror dependenŃă explicită de parametrii de stare fiind cunoscută, permit obŃinerea tuturor informaŃiilor termodinamice privitoare la sistemul considerat. Un tip aparte de funcŃii caracteristice sunt potenŃialele termodinamice. Pentru a defini potenŃialele termodinamice se pleacă de la expresia lucrului mecanic efectuat asupra sistemului exprimat prin relaŃia
1
m
i i
i
L bdaδ=
=∑ (4.114)
Din multitudinea de forŃe generalizate una este presiunea iar coordonata generalizată care-i corespunde este volumul. a1=V şi A1=-p atunci relaŃia (4.114) devine :
2
m
i i
i
L bda pdVδ=
= −∑ (4.115)
Dacă se va nota cu
2
m
i i
i
L bdaδ=
=∑
(4.116)
lucrul mecanic efectuat de forŃe generalizate altele decât presiunea, se obŃine următoarea expresie a lucrului mecanic
L L pdVδ δ= −
(4.117) Utilizând (4.117) ecuaŃia fundamentală a termodinamicii pentru procese cvasistatice se va scrie în felul următor:
dU TdS pdV Lδ= − +
(4.118) de unde, lucrul mecanic al altor forŃe generalizate decât presiunea este:
L dU pdV TdSδ = + −
(4.119)

89
Definim potenŃialul termodinamic ca fiind orice funcŃie caracteristică a cărei variaŃie îl
da pe Lδ
. PotenŃialele termodinamice mai au proprietăŃile următoare.
- derivatele lor parŃiale în report cu unele variabile de stare, exprimă alte variabile ale sistemului.
- starea de echilibru a sistemului este definit de o condiŃie de extrem a potenŃialului termodinamic.
Se pot construi o mulŃime de funcŃii de stare care sa joace rol de potenŃiale termodinamice, dar in continuare se vor studia doar cele mai des utilizate în rezolvarea unor probleme de termodinamică.
4. 7.2.1 Energia internă. În conformitate cu formula fundamentală a termodinamicii, expresia energiei interne este
i idU TdS bda= +∑ (4.120)
Această relaŃie arată că energia internă depinde de entropie şi de mulŃimea parametrilor de poziŃie, ca în relaŃia următoare.
( ), iU U S a= (4.121)
Prin diferenŃierea relaŃiei se obŃine:
,i j
i
a i S a
U UdU dS da
S a
∂ ∂ = + ∂ ∂ ∑ (4.122)
din identificarea coeficienŃilor rezultă
ia
UT
S
∂ = ∂ (4.123)
şi
,j
i
i a S
Ub
a
∂= ∂
(4.124)
Deci energia internă este un potenŃial termodinamic , când entropia şi volumul sunt variabile independente. În cazul în care sistemul analizat este un fluid,
ia V= şi ib p= − (4.125)
Înlocuind (4.125) în (4.122) expresia energiei interne este:
V S
U UdU dS dV
S V
∂ ∂ = + ∂ ∂ (4.126)
şi

90
V
UT
S
∂ = ∂ şi
S
Up
V
∂ = − ∂ (4.127)
Se pot obŃine şi alte mărimi importante utilizând derivatele de ordinul II.
2
2V VV
U T T TT
S S T S C
∂ ∂ ∂ = = = ∂ ∂ ∂ (4.128)
din această expresie se deduce capacitatea calorică izocoră:
2
2
V
V
TC
U
S
= ∂ ∂
(4.129)
4. 7.2.2. Entalpia Entalpia este o funcŃie de stare caracteristica definită prin relaŃia:
i i
i
H U bda= −∑ (4.130)
diferenŃiind această relaŃie se obŃine expresia:
i i i i i i
i i i
dH dU bda a db TdS a db= − − = −∑ ∑ ∑ (4.131)
Se observă că entalpia este funcŃie de entropie şi de parametrii de forŃă generalizată
( ), iH H S b= (4.132)
diferenŃiind această relaŃie, rezultă expresia.
,i j
i
ib i b S
H HdH dS db
S b
∂ ∂ = + ∂ ∂ ∑ (4.133)
identificând termenii în expresiile (4.133) şi (4.131) rezultă:
ib
HT
S
∂ = ∂ şi
,j
i
i b S
Ha
b
∂= − ∂
(4.134)
din relaŃiile (4.130) şi (4.134) rezultă următoarea ecuaŃie calorică de stare:
,j
i
i b S
HU H b
b
∂= + ∂
∑ (4.135)
Pentru a demonstra că entalpia joaca rolul unui potenŃial termodinamic, în cazul particular al unui fluid,(a=V; b=-p) ecuaŃia fundamentală a termodinamicii se va scrie în felul următor :

91
dU TdS L pdVδ= + −
(4.136) sau,
L dU TdS pdV Vdp Vdpδ = − + + −
(4.137) prin regruparea termenilor rezultă:
( )L d U pV TdS Vdpδ = + − −
(4.138)
sau,
( )L d H TdS Vdpδ = − −
(4.139)
Dacă S şi p sunt constante se observă că într-adevăr
( )L d Hδ =
(4.140)
Pentru a clarifica sensul fizic al entropiei se ia în considerare un gaz ideal care-si modifica volumul izobar de la V1 la V2 .Atunci in starea 1 entalpia va fi : 1 1 1H U pV= + iar în starea 2 2 2 2H U pV= + (4.141)
variaŃia entalpiei este ( )2 1 2 1H U U p V V U p V∆ = − + − = ∆ + ∆ (4.142)
dar conform principiului I, Q U p V= ∆ + ∆ (4.143) prin urmare entalpia este o mărime de stare a cărei variaŃie este egală cu căldura schimbată de sistem într-o trasformare izobară.
Căldura schimbată într-un proces elementar, este exprimată cu ajutorul entalpiei prin următoarea relaŃie : ( )dQ dU pdV d U pV Vdp dH Vdp= − = + − = − (4.144)
Inlocuind în relaŃia (4.144) diferenŃiala entalpiei rezultă
p T
H HdQ dT dp Vdp
T p
∂ ∂ = + − ∂ ∂
această relaŃie permite deducerea entropiei,
p T
dQ H dT H dp VdS dp
T T T p T T
∂ ∂ = = + − ∂ ∂ (4.145)
La presiune constantă, dp=0 deci se poate deduce căldura molară izocoră.

92
0 0 0
V
p p p
S H QT C
T T T
∂ ∂ ∂ = = = ∂ ∂ ∂ (4.146)
În cazul fluidelor H U pV= + .Dacă entropia S este constantă, şi energia internă va avea aceeaşi prorietate, prin urmare,
S
HV
p
∂= ∂
(4.147)
deci, rezultă următoarea ecuaŃie calorică de stare
S
HU H p
p
∂= − ∂
(4.148)
4.7.2.3. Entalpia libera sau potenŃialul termodinamic al lui Gibbs
Aceasta funcŃie caracteristică este definită prin relaŃia :
G H TS= − (4.149)
Prin diferenŃiere se obŃine :
dG dH TdS SdT= − − (4.150)
introducând în (4.150) expresia
i i
i
dH TdS a db= −∑ (4.151)
se obŃine i i
i
dG SdT a db= − −∑ (4.152)
Aceasta relaŃie arată că G este o funcŃie de T şi ib
( ), iG G T b= (4.153)
se diferenŃiază această relaŃie şi se obŃine
i
i
i ib T
G GdG dT db
T b
∂ ∂= + ∂ ∂
∑ (4.154)

93
identificând (4.154) cu (4.152) rezultă două relaŃii care permit calcularea entropiei şi a coordonaelor generalizate:
ib
GS
T
∂= − ∂
şi ,j
i
i b T
Ga
b
∂= ∂
(4.155)
Din (4.152) şi (4.155) se obŃine:
H=G +TS (4.156)
de unde, ib
GH G T
T
∂ = − ∂ (4.157)
Se poate demonstra că faptul că entalpia liberă (potentialul Gibbs) devine potenŃial termodinamic atunci cand presiunea si temperatura sunt constante şi constituie variabile independente. Intradevăr in acest caz dp=0 si dT=0 deci dG= Lδ ceea ce satisface conditia de potential termodinamic.Entalpia liberă se interpretează ca fiind entalpia pe care o poate pune în exterior sistemul dupa ce şi-a consumat energia legata TS.
4.8 Elemente de fizică moleculară
S-a arătat că starea unui sistem la scară macroscopică depinde de un număr redus
de parametrii cum sunt presiuna, volumul, temperatura etc.,pe când la scară moleculară starea aceluiaşi sistem poate fi deacrisă printr-un număr imens de parametrii. D.Bernoulli, în 1738, a explicat primul presiunea gazelor, considerând cä moleculele gazului se mişcă cu viteze mari şi ciocnesc pereŃii vasului în care se află. Această teorie numită teoria cinetică a gazelor s-a desvo1tat în a doua jumătate a socolului al 19-lea prin lucrările lui Clausius, Boltzmann şi Maxwell Numărul de molecule care alcătuiesc o cantitate mcroscopică de gaz este foartemare iar mişcarea lor este total dezordonată, din această cauză teoria cineticä a gazelor foloseşte pentru deducerea ecuaŃiilor de stare metode statistice.
O simplificare considerabilă apare atunci când se consideră că moleculele gazului sunt punctiforme (nu au volum propriu) şi între ele nu se exercită forŃe de interacŃiune.Singurele interacŃiuni posibile sunt doar ciocniri perfect elastice cu pereŃii incintei în care este cuprins gazul. Intre douä ciocniri, mişcarea moleculei se consideră rectilinie şi uniformă
Un gaz care satisface aceste condiŃii restrictive este numit gaz ideal sau gaz perfect.
În condiŃii normale (presiuni mici şi temperaturi apropiate de temperaturile ambiante, majoritatea gazelor se comport ca fiind gaze ideale)

94
4.8.1.EcuaŃia fundamentală a teoriei cinetice a gazelor ideale. Se consideră că se delimitează dintr-un gaz un volum oarecare V, având forma
unui paralelipiped dreptunghic cu laturile a, b, c, dirijate paralel, cu axele de coordonate,ca în figura 4.10
Figura 4.10
Acest volum are valoarea
V=abc (4.158)
Ariile feŃelor paralelipipedului perpendiculare pe axele de coordonate vor fi: Sx= bc Sy=ac Sz =ab. (4.159)
Se va admite că în volumul V al gazului se află N molecule, adică în unitatea de volum
vor fi n0= N/Vmolecule.Fie într-un punct oarecare al gazului o moleculă de masă m0, a
cărei viteză vrare o direcŃie arbitrară. Notând,cu vx; vy;şi vz, proiecŃiile vectorului viteză
după cele trei axe de coordonate, rezultä evident cä: 2 2 2 2
x y zv v v v= + + (4.160)
Se consideră că molecula ciocneşte pereŃii vasului şi că ciocnirile ei
sunt elastice. Se va cerceta mişcarea moleculei in direcŃia axei Ox. Molecula se va ciocni
de faŃa ABED, având componenta xvr perpendiculară pe ABED. După ciocnire,
componenta xvr a vitezei moleculei va fi aceeaşi ca mărime, dar orientată în sens opus,
x
vr
vx
VZ
Vx
b
a
c
z
x

95
adică- xvr In timpul ciocnirii, impulsul moleculei variază de la m xv
r la -m xv
r.
Prin urmare, în cursul ciocnirii, molecula capătă impulsul,
( )x xfdt mv mv= − − (4.161)
unde dt este durata ciocnirii sau, 2 xfdt mv= (4.162)
Dacä numărul ciocnirilor exercitate pe latura ABED pe secundä va fi q, rezultă relaŃia: 2 xqfdt qmv= (4.163)
In timpul ciocnirii, forŃa f, variază în mod continuu şi deoarece nu se cunoaşte relaŃia
dintre forŃă şi timp se înlocuieşte produsul f.dt.q cu o forŃă echivalentă fx astfel că se
poate scrie: 2x xfdt f qmv= = (4.164)
Notând cu τ timpul dintre două loviri consecutive ale moleculei. de peretele
ABED, el poate fi aflat, impărŃind spaŃiul 2a parcurs de moleculă în acest timp cu viteza
moleculei vx .(Intre douä ciocniri, mişcarea moleculei se consideră rectilinie şi uniformä.)
2
x
a
vτ = (4.165)
Dar 1
2xvqaτ
= = (4.166)
Înlocuind în relaŃia (4.164), se obŃine :
2x
x
mvf
a= (4.167)
În mod analog se pot scrie şi următoarele relaŃii:
2y
y
mvf
b= (4.168)
şi 2z
z
mvf
c= (4.169)
În volumul V se află N moleculecare pentru început vor fi considerate ca fiind cu masele
m1, m2, m3 … şi care au vitezele v1, v2, v3, ….., vn, .AdmŃând că moleculele nu

96
intreacŃionează între ele, se pot exprima forŃele Fx, Fy, Fz, care acŃionează pe cele trei feŃe
ale cubului care au fost luate în discuŃie, în urma ciocnirilor provocate de cele N molecule
din vas.
1 2 3 ....x x x x NxF f f f f= + + + + (4.170)
1 2 3 ....y y y y NyF f f f f= + + + + (4.171)
1 2 3 ....xz z z z NzF f f f f= + + + + (4.172)
înlocuind expresiile forŃelor f, se obŃine:
2 2 2 21 1 2 2 3 3 ...x x x N Nx
x
m v m v m v m vF
a a a a= + + + + (4.173)
2 2 2 2
1 1 2 2 3 3 ...y y y N Ny
y
m v m v m v m vF
b b b b= + + + + (4.174)
2 2 22
2 2 3 31 1 ...x z N Nzzz
m v m v m vm vF
c c c c= + + + + (4.175)
Presiunile exercitate pe cele trei feŃe luate în calcul vor fi :
( )2 2 2 2
2 2 2 21 1 2 2 3 31 1 2 2 3 3
1 1( ... ) ...x x x x N Nx
x x x x N Nx
F m v m v m v m vp m v m v m v m v
bc bc a a a a V= = + + + + = + + + +
(4.176)
( )2 2 2 2
1 1 2 2 3 3 2 2 2 21 1 2 2 3 3
1 1( ... ) ...y y y y N Nx
y y y y N Ny
F m v m v m v m vp m v m v m v m v
ac ac b b b b V= = + + + + = + + + +
(4.177)
( )2 22 2
2 2 2 23 31 1 2 21 1 2 2 3 3
1 1( ... ) ...z N Nzz z z
z z z z N Nz
m v m vF m v m vp m v m v m v m v
ab ab c c c c V= = + + + + = + + + +
(4.178)
Observând că mişcarea moleculară este haoticä şi că nici o direcŃie de mişcare nu este
preferată alteia (greutatea are o inf1uenŃă neglijabilă asupra moleculelor, care se mişcă
foarte repede) , iar toate cele trei feŃe în privinŃa ciocnirilor se gäsesc în condiŃii cu
perfect identice, putem scrie cä:

97
px=py=pz =p. (4.179)
Însumând, membru cu membru, relaŃiile (4.176), (4.177), (4.178)rezultä :
( )2 2 2 2 2 2 2 2 2 2 2 21 1 1 1 2 2 2 2 3 3 3 3
13 ( ) ( ) ( ) ... ( )
x y z x y z x y z N Nx Ny Nzp m v v v m v v v m v v v m v v v
V= + + + + + + + + + + + +
(4.180) łinând cont de expresiile vitezelor 2 2 2 2
i ix iy izv v v v= + + (4.181)
se obŃine relaŃia următoare :
( )2 2 2 21 1 2 2 3 3
13 .... N Np m v m v m v m v
V= + + + + (4.182)
Dacă n1 este numărul moleculelor care au viteza v1, v2 a celor care au viteza v2 şi …nN numărul celor care au viteza vn şi dacă gazul este omogen moleculele sunt identice de masă m0 atunci masele care interacŃionează cu peretele vor fi : 1 0 1 2 0 2 3 0 3 0; ; ;... N Nm m n m m n m m n m m n= = = = (4.183)
şi în acest caz expresia presiunii este
( )2 2 2 2 20 01 1 2 2 3 3
1
....3 3
N
N N i i
i
m mp n v n v n v n v n v
V V =
= + + + + = ∑ (4.184)
Suma 2
1
N
i i
i
n v=∑ este practic imposibil de calculat deoarece nu se cunosc valorile vitezelor
fiecărei molecule.Dar dacă se determină print-un mijloc oarecare media aritmetică a pătratelor vitezelor, mărime denumită viteza pătratică medie, exprimată prin relaŃia,
( )2 2 2 21 2 3 2
.... Nv v v vv
N
−+ + + += sau ,
2 2 22 1 1 2 2
1 2
....
...n n
n
n v n v n vv
n n n
− + + +=
+ + + (4.185)
valoarea acestei sume este :
2 2 2
1 1
N N
i i i
i i
n v n v N v− −
= =
= =∑ ∑ (4.186)
Dacă se va nota cu m masa de gaz din incintă şi cu N numărul de molecule, atunci masa unei
Înlocuind expresia vitezei pătratice medii în expresia presiunii rezultă:
2
20 02
3 3 2
m N N m vp v
V V= = (4.187)

98
această formulă poartă numele de formula fundamentală a teoriei cinetice a gazului ideal. Mărimea,
22 2 2
00 0 0
2 2 2 2yx z
t
m vm v m v m vε
−− −
= = + + (4.188)
reprezintă energia cinetică medie a mişcării de translaŃie a unei molecule de gaz. 4.8.2 Interpretarea cinetică a temperaturii. Dacă se aduc în contact două gaze ale căror molecule au energii cinetice medii de
translaŃie diferite, se constată că moleculele mai rapide îşi reduc vitezele iar cele mai lente şi-o măresc, ajungându-se după un timp la o viteză şi la o energie cinetică medie de translaŃie comună. La fel dacă se pun în contact două gaze cu temperaturi diferite, cel cu temperatura mai mare se răceşte iar cel cu temperatură mai mică se încălzeşte, ajungându-se după un timp la o temperatură comună de echilibru termodinamic. Pe baza acestui comportament identic Boltzman a arătat că temperatura unui gaz ideal este o măsură a intensităŃii mişcării termice a moleculelor respectivului gaz. El a stabilit demonstrat o teoremă care-i poartă numele care afirmă că fiecărei forme pătratice (grad de libertate)din expresia energie cinetice medii îi corespunde o energie egală
2
kT.(teorema echipartiŃiei energiei pe grade de libertate) k =1,38.10-23 J/K este o
constantă universală numită constata lui Boltzman. În cazul gazului ideal monoatomic molecula punctiformă are doar trei grade de libertate(are trei posibilităŃi de mişcare de-a lungul axei ox , de-a lungul axei oy, şi de-a lungul axei oz) deci conform teoremei echipartiŃiei energiei, energia cinetică medie de translaŃie se va exprima în felul următor.
2
0 3
2 2
m vkT= (4.189)
În cazul moleculelor poliatomice, în expresia energiei medii, pe lângă termenii de translaŃie apar forme pătratice suplimentare datorate rotaŃiilor şi vibraŃiilor. Dacă molecula este biatomică având forma unei haltere microscopice în expresia energiei medii de translaŃie apare câte un termen corespunzător unei rotaŃii în jurul axei ox cu viteza unghiulară θω şi uneia corespunzător unei rotaŃii în jurul axei oz. cu viteza
unghiulară ϕω (Figura4.11). Dacă cele două momente de inerŃie se vor nota
cu Iθ respectiv Iϕ , expresia energiei cinetice de translaŃie şi de rotaŃie este:
2 2 2 2 2
0 0 0
2x y zm v m v m v I Iϕ ϕ θ θω ω
ε+ + + +
= (4.190)

99
Figura 4.11 În această situaŃie,
5
2kTε = (4.191)
În general dacă numărul de grade de libertate este i expresia energiei cinetice medii este :
2
ikTε = (4.192)
4.8.3 EcuaŃia termică de stare a gazului ideal. S-a arătat în paragrafele anterioare că ecuaŃiile termice de stare nu pot fi deduse
în cadrul termodinamicii pentru că aceasta face abstracŃie de structura microscopică a sistemelor termodinamice. Teoria cinetică a gazelor analizat tocmai această structură şi permite deducerea ecuaŃiei termice de stare în cazul particular a gazului ideal. Pentru aceasta se înlocuieşte energia cinetică medie din relaŃia lui Boltzman în formula fundamentală a teoriei cinetice, a gazului ideal, obŃinându-se:
2 3
3 2
N kTp
V= (4.193)
sau, pV NkT= (4.194) Dacă se va nota cuυ numărul de kilomoli de gaz din incinta de volum V,şi cu NA
numărul de molecule dintr-un kilomol, (acesta este tot o constantă universală numită numărul lui Avogadro, NA=6,023.10
26molecule /kmol) atunci numărul de molecule este dat de expresia
ApV N kTυ= (4.195)
Produsul celor două constante universale este o nouă constantă universală R numită constanta universală a gazului ideal.
8310A
JR N
kmolKυ= =
Introducând această constantă în ecuaŃia (4.1---) se regăseşte ecuaŃia termică de
stare utilizată fără demonstraŃie teoretică în cadrul termodinamicii.

100
pV RTυ= (4.196) sau, notând cu m masa de gaz din volumul V, şi cu µ masa sa molară, ecuaŃia va lua următoarea formă.
m
pV RTµ
= (4.197)
Această ecuaŃie poartă numele ecuaŃia Clapeyron-Mendeleev, ea a fost iniŃial dedusă din considerente experimentale. Se poate demonstra că formula este valabilă şi în cazul moleculelor poliatomice care au mai multe grade de libertate.
4.8.4.EcuaŃia calorică de stare a gazului ideal. Teoria cinetică a gazelor permite calcularea energiei interne datorită faptilui că fiecare moleculă are aceeaşi energie cinetică medie a mişcării de,ε
2 2
i iU N NkT RTε υ= = = (4.198)
Căldura molară izocoră a gazului este conform relaŃiei (4.38)
1 1
2V
V V
Q U iRC
T Tυ υ∂ ∂ = = = ∂ ∂
(4.199)
Întrucât în procesul izoterm a gazului ideal nu se efectuează lucru mecanic şi întrucât variaŃia energiei interne nu depinde de proces se impune concluzia evidentă că în cazul gazului ideal variaŃia energiei interne în orice proces este egală cu căldura schimbată izocor de masa de gaz. Pe baza acestei constatări se poate deduce relaŃia dintre căldura molară izocoră şi căldura molară izobară. Conform principiului I al termodinamicii, într-un proces izobar se poate scrie relaŃia: p pQ C dT dU pdVδ υ= = + (4.200)
Ştiind că în general U=U(T,V) şi înlocuind în (4.200) diferenŃiala sa totală se deduce expresia ,
1
p
V T p
U U VC p
T V Tυ
∂ ∂ ∂ = + + ∂ ∂ ∂ (4.201)
łinând cont de (4.199) diferenŃa dintre căldura molară izobară şi ceea izocoră este:
1
p V
T p
U VC C p
V Tυ ∂ ∂ − = + ∂ ∂
(4.202)

101
Înlocuind (4.202) relaŃiile (4.198) şi (4.196) ,după simplificările necesare se obŃine relaŃia dintre cele două călduri molare, în cazul gazului ideal. Aceasta este numită relaŃia lui Mayer. p vC C R− = (4.203)
4.8.5Transformări termodinamice ale gazului ideal
4.8.5.1 Transformarea politropă Transformarea politropă este o tansformare de stare în care căldura molară se manŃine constantă.Astfel de transformări au loc foarte des şi în multe probleme practice transformările care au loc se pot aproxima ca fiind politrope.Pentru a deduce relaŃia dintre presiune şi volum în transformarea politropă se notează cu C căldura molară a acestei transformări se aplică principiul I al termodinamicii.
politropadU Q pdVδ= − (4.204)
Conform definiŃiei căldurii molare politropaQ CdTδ υ= (4.205)
łinând cont de cele arătate anterior despre dU, expresia princpiului I ia următoarea formă.
vC dT C dT pdVυ υ= − (4.206)
DiferenŃiind ecuaŃia termică de stare a gazului ideal, rezultă pdV Vdp RdTυ+ = (4.207) Se înlocuieşte dT din această formulă în relaŃia (4.206) se grupează termenii şi rezultă :
1V
R dV dp
C C V p
− = − −
(4.208)
Mărimea din paranteză se notează cu κ şi se va numi indice politropic.RelaŃia(4.208)se transformă în felul următor :
dV dp
V pκ = − (4.209)
pentru a deduce relaŃia dintre presiune şi volum se consideră că transformarea începe din starea 0, 0p V şi se ajunge în starea arbitrară, ,p V
Se integrează relaŃia (4.209) între aceşti paremetrii
0 0
pV
V p
dV dp
V pκ = −∫ ∫ (4.210)
în final se obŃine expresia

102
0 0
V p
V p
κ
= −
(4.211)
sau în final se obŃine legea transformării politrope sub următoarea formă 0 0 .p V pV constκ κ= = (4.212)
Din formula de definire a indicelui politropic(4.208)se deduce expresia căldurii molare din această transformare.
1V
RC C
κ= +
− (4.213)
4.8.5.2 Transformarea adiabatică. Transformarea adiabatică este o transformare în care gazul nu schimbă căldură cu mediul. O asemenea trnsformare nu poate exista în natură căci este imposibilă anularea totală a schimbului de căldură.Totuşi, în foarte multe probleme practice procesele care au loc în incinte foarte bine izolate termic sau care se produc atît de rapid încât gazul “ nu are timp“ să schimbe căldură pot fi considerate ca fiind adiabatice. Dacă nu există schimb de căldură căldura molară în această transformare este nul, C=0, deci conform relaŃiei (4.213),
01V
RC
κ+ =
− (4.214)
deune rezultă :
p
V
C
Cκ γ= = (4.215)
ecuaŃia acesti transformări este conform relaŃiei (4.212) următoarea :
0 0 .p V pV constγγ = = (4.216)
sau dacă se Ńine cont de ecuaŃia termică de stare ,
11
0 0 .TV TV constγγ −− = = (4.217)
EccuaŃiile (4.216) şi (4.217) exprimă legea transformării adiabatice numită după numele celui care a dedus-o prima dată, legea lui Poisson.

103
4.8.5.3 Transformarea izotermă Transformarea izotermă este o transformare în care gazul îşi schimbă
presiunea şi volumul, temperatura sa rămănând constantă. În cazul în care T=constant, dT=0 deci variaŃia eneregiei interne este de
asemanea nulă 0VdU C dTυ= = (4.218)
şi energia internă a gazului nu se schimbă ; U=constant. In transformarea izotermă , conform principiului I al termodinamicii
Q Lδ δ= (4.219) Căldura schimbată este folosită pentru a absorbi sau a ceda lucru mecanic. Căldura molară a acestei transformări tinde la infinitpentru că dT=0
1
T
dQC
dTυ = = ∞
(4.220)
În această situaŃie din relaŃia (4.212) se deduce că transformarea izotermă poate fi considerată ca fiind o transformarea politropă având inicele politropic 0κ = .Prin urmare conform relaŃiei (4.216) legea transformării izoterme este exprimată de următoarea relaŃie.
0 0 .p V pV const= = (4.221)
sau ca urmare a ecuaŃiei termice de stare, pentru o masă constantă din acelaşi gaz, .pV RT constυ= = (4.222) RelaŃia (4.222) exprimă în formă matematică legea transformării izoterme numită legea Boyle-Mariotte.
RelaŃiile (4.221) şi (4.222) pot fi utilizate corect doar dacă tanm
cons tυµ
= = , adică
trasformarea are loc în asa fel încât masa şi natura gazului nu se schimbă. Dacă se reprezintă grafic presiunea în funcŃie de volum curba obŃinută este o ramură de hiperbolă echilateră cu atât mai depărtată de axe cu cât temperatura este mai mare. (Figura 4.12)

104
Figura 4.12 4.8.5.4 Transformarea izocoră Transformarea izocoră este o transformare simplă în care se schimbă temperatura şi presiunea , volumul rămănând neschimbat, V=constant În acest caz după cum s-a arătat,
0
V V
L
dU Q C dT
δδ υ
=
= = (4.223)
Aceasta transformare poate fi considerată ca fiind o transformare politropă cu κ →∞ Întradevăr, din relaŃia, (4.216) rezultă
1
00
pV V
p
κ =
(4.224)
şi se observă că pentru κ →∞ 0V V→
Din ecuaŃia termică de stare,rezultă :
R mR
p T TV V
υµ
= = (4.225)
deci într-o transformare izocoră a unei mase constante de acelaşi gaz ideal ,presiunea creşte liniar cu temperarura. Panta dreptei care reprezintă dependenŃa presiunii de temperatură are valoarea invers proporŃională de volum, dar depinde şi direct proporŃional de numărul de kilomoli.(Figura 4.13)
p
T2
V
T3
T1
T1 ⟨ T2 ⟨ T3

105
Figura 4.13 4.8.5.5 Transformarea izobară
Transformarea izobară este o transformare simplă în care se schimbă temperatura şi volumul presiunea , rămănând neschimbată, p=constant În acest caz după cum s-a arătat anterior, se efectuează lucru mecanic şi se face schimb de căldură.Căldura molară Cp corespunde unei transformări politrope cuκ =0. EcuaŃia transformării izobare deduse din ecuaŃia termică de stare este:
R mR
V T Tp p
υµ
= = (4.226)
eci într-o transformare izobară a unei mase constante de acelaşi gaz ideal ,volumul ocupat de gaz creşte liniar cu temperarura. Panta dreptei care reprezintă dependenŃa volmului de temperatură are valoarea invers proporŃională cu presiunea, dar depinde şi direct proporŃional de numărul de kilomoli.(Figura 4.14) Figura 4.14 4.8.6 Densitatea gazului ideal Gazele au masă dar nu au volum propriu, ele având volumul vasului în care se află. De aici se trage concluzia că gazele nu au nici densitate constantă.Aceasta va depinde de presiune şi de temperatură.
p
T
V1
V2
1 2V V⟩
V
T
V1
V2
1 2p p⟩

106
Densitatea unui gaz este definită ca fiing reportul dintre masa gazului şi volumul ocupat de acesta.
m
Vρ = (4.227)
Înlocuind în aceată relaŃie masa din eccuaŃia termică de stare (4.197) se exprimă densitatea gazului idea prin următoarea relaŃie.
p
RT
µρ = (4.228)
Se remarcă dependenŃa densităŃii de presiune şi de temperatură.Atunci când gazul se află în condiŃii normale de presiune şi temperatură, adică la T0=273,15
0C şi la p0=1.013.10
5 N/m2, densitatea sa este
00
0
p
RT
µρ = (4.229)
Densitatea din alte condiŃii se exprimă în funcŃie de densitatea normală.prin relaŃia :
00
0
p T
p Tρ ρ= (4.230)
Figura 4.15 Presiunea exercitată de coloana infinitezimală.este ( )dp z gdzρ− = (4.231)
Înlocuind densitatea din relaŃia (4.228) rezultă următoarea ecuaŃie diferenŃială:
( )
dp g dz
p R T z
µ= − (4.232)
4.8.6.1 DependenŃa presiunii aerului de înălŃime (formula barometrică) O coloană de aer exercită o presiune asupra unei suprafeŃe datorită greutăŃii sale.Dacă se consideră o coloană având înălŃimea z, aceasta va exercita la bază o presiune p(z). Pentru acalcula această presiune, se consideră la înăl Ńimea z, un strat de aer de înălŃime infinitezimală dz pe care presiunea scade cu dp ca în figura 4.15
z+dz p-dp
z
p

107
Figura 4.15 Presiunea exercitată de coloana infinitezimală.este ( )dp z gdzρ− = (4.231)
Înlocuind densitatea din relaŃia (4.228) rezultă următoarea ecuaŃie diferenŃială:
( )
dp g dz
p R T z
µ= − (4.232)
La sol presiunea este p0, iar la o înălŃime oarecare z, este p. După integrare rezultă relaŃia
( )0 0
lnz
p g dz
p R T z
µ= − ∫ (4.233)
sau
( ) ( )0
0
zg dz
R T zp z p e
µ− ∫
= (4.234)
Această relaŃie este denumită formula barometrică şi permite calcularea presiunii la înălŃimea z , atunci când se cunoaşte dependenŃa temperaturii de înălŃime. În mod normal, temperatura aerului scade cu înălŃimea, dar pentru creşteri nu prea mari al înălŃimii, atmosfera poate fi aproximată ca fiind izotermă. T=constant : în acest caz formula barometrică ia următoarea formă.
( ) 0
gz
RTp z p eµ
−= (4.235)
În multe alte situaŃii se poate considera că scăderea temperaturii cu înălŃimea se produce liniar, cu o rată de scădere α după o lege de forma. ( ) 0T z T zα= − (4.236)
în această situaŃie, relaŃia 4.232 se transformă în modul următor:
0
dp g dz
p R T z
µα
= −−
(4.237)
după integrarea acestei relaŃii se obŃine următoarea expresie pentru presiune.

108
( ) 00
1
g
R
p z p zT
µαα
= −
(4.238)
Formula barometrică stă la baza proiectării altimetrelor şi a detonatoarelor de înălŃime a proiectilelor antiaeriene. 4.8.6.1 DependenŃa densităŃii aerului de înălŃime şi de gradientul de temperatură.
Pentru a deduce modul în care densitatea variază cu înălŃimea, derivează expresia densităŃii cu înălŃimea z ,de la nivelul solului,
−=dz
dT
T
p
dz
dp
TRdz
d2
1µρ (4.239)
Din formula (4.231) rezultă .
gdz
dpρ−= (4.240)
Înlocuind în expresia anterioară, se va obŃine următoarea relaŃie
dz
dT
TRT
p
RT
g
dz
d 1µµρρ−−= (4.241)
reorganizând relaŃia se obŃine:
( )dz
dT
R
g
Tdz
d+−=
µρρ (4.242)
Pentru a obŃine expresia densităŃii la o înălŃime z oarecare, se rescrie expresia in modul următor,
( ) T
dT
zT
dz
R
gd−−=
µρρ
(4.243)
şi se integrează de la nivelul solului z=0; ρ=ρ0 ; T=T0 la înălŃimea z unde temperatura este T(z) si densitatea aerului este ρ.
( )
( )
0 00
T zz
T
d g dz dT
R T z T
ρ
ρ
ρ µρ
= − −∫ ∫ ∫ (4.244)
( ) 00
ln lnz
g dz T
R T z T
ρ µρ= − −∫ (4.245)
in final se obŃine relaŃia.

109
( )
( )00
0
zg dz
R T zTe
T z
µ
ρ ρ− ∫
= (4.246)
Dacă temperatura se menŃine constantă ,T(z)=T0, (atmosferă izotermă), densitatea scade exponenŃial după următoare lege:
( ) 00
gz
RTz e
µ
ρ ρ−
= (4.247)
Dacă temperatura scade liniar cu înălŃimea, cum se întâmplă foarte des cu o aproximaŃie foarte bună ,după o lege de forma 0T T zα= − , (4.248)
α, fiind valoarea gradientului de temperatură, atunci densitatea variază cu înălŃimea după următoarea lege.
( )1 1
0 00 0
1 1
ag
R
z z zT T
µ αα αα α
ρ ρ ρ− −
= − = −
(4.249)
Mărimea a
g
R
µα = =3,42.10-2 K/m se numeşte gradient de autoconvecŃie şi dacă
aα α= , densitatea aerului este constantă pe înălŃime (atmosferă izodensă) .Dacă
aα α⟨ atunci,
exponentul, 0 1 0αα
− ⟩ şi funcŃia ( )zρ este descrescătoare, densitatea straturilor superioare
fiind mai mică decât a celor inferioare. Această situaŃie este până la un punct normală conferind o bună stabilitate pe verticală a maselor de aer. Totuşi chiar şi în această situaŃie un gradient termic α mult mai mare decât cel normal întâlnit de obicei la contactul unei mase de aer mai calde cu solul sau marea rece face ca densitatea să scadă foarte rapid provocând refracŃia anormală a sunetelor sau a undelor electromagnetice.
Dacă aα α⟩ atunci, exponentul, 0 1 0αα
− ⟨ şi funcŃia ( )zρ este crescătoare,
densitatea straturilor superioare fiind mai mare decât a celor inferioare. Această situaŃie este numită inversiune termică. În acest caz straturile superioare de aer cu densitate mai mare tind să coboare şi să dezlocuiască masele inferioare cu densitate mai mică, provocând o instabilitate verticală a coloanei de aer.
4.8.7 Gaze reale. EcuaŃia de stare van der Waals Experimentele efectuate asupra gazelor la presiuni mari şi la temperaturi scăzute au relevat abateri de la comportamentul de gaz ideal. Pentru cantitate dată de gaz ideal aflat la T= constant, dacă se reprezintă produsul pV în funcŃie de p izoterma trebuie să fie o dreaptă paralelă cu axa p. În realitate nici un gaz nu are exact acest comportament mai ales la presiuni mari. În figura 4.16 este reprezentată izoterma pV=f(p) pentru trei gaze la temperatura T0=273 K.

110
Figura 4.16
Se observă că abaterile de la izoterma gazului ideal cresc cu presiunea şi depind
şi de natura gazului. Cauzele acestei abateri sunt simplificările introduse în construirea modelului de gaz ideal la care nu s-a Ńinut cont de volumul propriu a moleculelor şi de existenŃa unor forŃe de atracŃie între ele. Pentru a descrie comportamentul gazelor reale, van der Waals a introdus două
corecŃii în ecuaŃia termică de stare a gazului ideal. Acestea sunt -corecŃia de volum: volumul disponibil mişcării moleculelor este mai mic decât
volumul geometric a incintei, pentru că o parte din aceasta este ocupată de moleculele de gaz care de astă dată au un volum propriu Vp. Dacă se notează cu v volumul unei molecule şi cu N numărul lor, atunci volumul ocupat de molecule este: p AV Nv N vυ= = (4.250)
Produsul de constante AN v se notează cu b şi se numeşte covolum. Covolumul
depinde de natura gazului. - corecŃia de presiune: moleculele se atrag între ele cu forŃe de coeziune care se
exercită pe distanŃe relativ mici. AcŃiunea acestor forŃe este echivalentă cu existenŃa unei presiuni interne pi care se adaugă la presiunea exercitată asupra gazului. Cu aceste două corecŃii ecuaŃia termică de stare a gazului real va avea următoarea
formă. ( )( )ip p V b RTυ υ+ − = (4.251)
Expresia explicită a presiunii interne se poate deduce plecând de la faptul că forŃele de atracŃie dintre molecule sunt forŃe care se exercită pe o distanŃă mică, având ordinul de mărime σ=10-8 cm. În interiorul masei de gaz, fiecare moleculă este atrasă în toate direcŃiile de un număr foarte mare de alte molecule aflate în sfera de rază σ(sfera de acŃiune moleculară) deci rezultanta acestor forŃe este nulă. Asupra moleculelor aflate în apropierea peretelui vasului, acŃionează doar moleculele care se găsesc la o distanŃă egală cu raza de acŃiune moleculară, deci rezultanta acestor forŃe este îndreptată spre interiorul masei de gaz şi este normală la perete ca în figura 4.17.

111
Figura 4.17 Numărul de molecule care exercită aceste forŃe de atracŃie este proporŃional cu numărul de molecule Nσ care se găsesc în într-un volum Vσ=σ∆S. Notând cu 0n
concentraŃia moleculară, 0N n Sσ σ= ∆ (4.252)
forŃa de atracŃie 1f care se exercită asupra unei molecule este proporŃională cu acest
număr. Pe de altă parte numărul de astfel de molecule care sunt atrase spre interiorul masei de gaz este de asemenea proporŃional cu concentraŃia moleculară. Deci rezultanta forŃelor de atracŃie spre interior va fi: 2
0 1 0f n f n Sσ∆ (4.253)
Introducând un factor de proporŃionalitate A dependent de natura gazului, presiunea internă se va putea exprima astfel:
20i
fp n A
Sσ= =
∆ (4.254)
ConcentraŃia moleculară se exprimă prin relaŃia
0AN N
nV V
υ= = (4.255)
înlocuind în expresia presiunii interne rezultă:
2
22
Ai
N Ap
V
συ= (4.256)
Se introduce constanta dependentă de natura gazului, 2
Aa N Aσ= şi ecuaŃia de stare a
gazului real va avea forma următoare:
( )2
2
ap V b RT
V
υυ υ
+ − =
(4.257)
Această ecuaŃie se numeşte ecuaŃia lui van der Waals.
σ

112
4.8.7.1 Energia internă a gazului real. Energia internă a unei cantităŃi date de gaz real este mai mică decât pentru aceeaşi cantitate gaz ideal pentru că la formarea gazului forŃele interne efectuează un lucru mecanic care se cedează mediului sun formă de căldură. Deci pentru a obŃine energia internă a gazului real, din energia internă a gazului ideal se va aduna lucrul efectuat de forŃele interne.
V
V iU C T p dVυ∞
= + ∫ (4.258)
înlocuind presiunea internă,
22
1V
VU C T a dVV
υ υ∞
= + ∫ (4.259)
AdmiŃând că la V →∞ energia internă tinde către o valoare arbitrară U0 şi
efectuând integrarea se obŃine expresia energiei interne a gazului real (van der Waals)
2
0 V
aU U C T
V
υυ= + − (4.260)
Este de remarcat că spre deosebire de gazul ideal la care energia internă depinde
doar de temperatură, energia internă a gazului real depinde şi de volumul ocupat de acesta, ( ),U U T V= .
4.8.7.2 CoeficienŃii calorici ai gazului real
DependenŃa energiei interne a gazului real de volum face ca valorile coeficienŃilor
calorici să difere de valorile acestora la gazul ideal. Din ecuaŃia de stare van der Waals rezultă :
V
p R
T V B
υυ
∂ = ∂ − (4.261)
şi,
( )
2
2 3
2
T
p RT aV
V VV b
υ
υ
∂ = − ∂ − (4.262)
Dacă se iau în considerare relaŃiile (4.10) şi (4.16) se poate scrie expresia

113
( )
2
2 3
2V
p
T
p RV T V b
p RT aVT
V VV b
υυ
υ
υ
∂ ∂ ∂ −= − = ∂∂ − ∂ −
(4.263)
înlocuind relaŃia (4.263) în (4.202) şi luând din nou în considerare ecuaŃia de stare van der Waals, rezultă relaŃia dintre căldurile molare pentru gazul real.
( )2
3
1
21
p VC C Ra V b
RTV
υ υ− =
−−
(4.264)
de cele mai multe ori, este satisfăcută relaŃia:
2
1a
VRT
υ⟩⟩ , caz în care se obŃine după o dezvoltare în serie a expresiei (4.264)
următoare relaŃie aproximativă între cei doi coeficienŃi calorici.
2
1p V
aC C R
VRT
υ − = +
(4.265)
4.8.7.3 Procese adiabatice ale gazului real. Efectul Joule-Thomson. Deducerea coeficientului de destindere laminară.
Efectul Joule –Thomson este fenomenul de variaŃie a temperaturii unui gaz ca urmare a variaŃiei volumului, printr-o destindere adiabatică. Dacă o masă de gaz având energia internă U1 temperatura T1 şi presiunea p1 aflat într-o incintă de volum V1, se destinde adiabatic la un volum mai mare V2 , energia sa internă devine U2 presiunea p2 şi temperatura T2.Transformarea fiind adiabatică variaŃia energiei interne este egală cu lucrul efectuat nu depinde de proces. Prin urmare,
2 2 2
1 1 1
dU L pdVδ= − = −∫ ∫ ∫ (4.266)
rezultatul integrării este în mod evident 2 1 1 1 2 2U U pV p V− = − (4.267)
această relaŃie se poate pune sub forma: 1 1 1 2 2 2U pV U p V+ = + (4.268)

114
Deci procesul are loc cu conservarea entalpiei. H=H(p,T)=constant sau,
0pT
H HdH dp dT
p T
∂ ∂ = + = ∂ ∂ (4.269)
Mărimea care exprimă amploarea efectului Joule –Thomson este coeficientul de
destindere laminară definită prin relaŃia.
dT
dpµ = (4.270)
dacă se ia în considerare relaŃia (4.269) se obŃine:
T
p
H
pdT
Hdp
T
µ
∂ ∂ = = −∂
∂
(4.271)
Dacă se Ńie cont de relaŃia p
p
HC
T
∂ = ∂ , coeficientul de destindere laminară se
poate pune sub forma următoare.
T
p
H
p
Cµ
∂ ∂ = − (4.272)
pentru calcularea numărătorului din această relaŃie în cazul unul kilomol de gaz van der Waals, se exprimă entalpia în modul următor.
( )dH d U pV dU pdV Vdp= + = + + (4.273)
Înlocuind energia internă a gazului van der Waals şi Ńinând cont şi de ecuaŃia sa de stare, relaŃia (4.273) se va transforma în felul următor.
2V V
a RTdH C dT dV pdV Vdp C dT dV Vdp
V V b= + + + = + +
− (4.274)
de aici mărimea necesară calculării coeficientului de destindere laminară este.
T T
H RT VV
p V b p
∂ ∂= + ∂ − ∂
(4.275)
Exprimând presiunea din ecuaŃia de stare van der Waals şi derivând-o în funcŃie
de volum la temperatură constantă se obŃine relaŃia următoare.

115
( )22
12
T
V
a RTp
V V b
∂= ∂ −
−
(4.277)
Înlocuind relaŃia (4.277) în (4.275) se obŃine după mai multe calcule algebrice
următoarea expresie pentru coeficientul de destindere laminară.
2
2
21
1
21 1p
a bb
RT V
C a b
RTV V
µ
− − = − − −
(4.278)
Din relaŃia 4.264 se deduce relaŃia
( )2
3
1
21
p VC C
R a V b
RTV
υ υ
−=
−−
(4.279)
prin urmare, pentru un gaz real este valabilă relaŃia
0p VC C
R
−⟩ (4.280)
Deci numitorul expresiei (4.279) satisface următoarea relaŃie:
( )2
3
10
21
a V b
RTV
υ υ⟩
−−
(4.281)
şi, prin urmare semnul coeficientului de destindere laminară este dat de numărătorul expresiei (4.279).
2
21
a bb
RT V
− −
(4.282)
La temperatura Ti numită temperatura de inversie, numărătorul fracŃiei din relaŃia (4.265) se anulează.
2
21i
a bT
Rb V
= −
(4.283)
Dacă
iT T⟨ atunci coeficientul de destindere laminară este pozitiv

116
0dT
dpµ = ⟩ (4.284)
şi în acest caz, dacă prin destinare gazul îşi reduce presiunea, 2 1p p⟨ , 0dp⟨ rezultă că temperatura sa scade. În acest caz se spune că efectul Joule-Thomson este pozitiv. Dacă iT T⟩ , prin dilatare gazul se încălzeşte şi atunci efectul Joule-Thomson este
negativ. Semnul coeficientului de destindere laminară este dependent de raportul corecŃiilor din ecuaŃia van der Waals, deci este dependent de natura gazului.
Dacă iT T= are loc inversia adică, trecerea de la efectul Joule-Thomson pozitiv
la cel negativ şi din acest motiv temperatura iT este numită temperatura de inversie.
În cazul gazului ideal, efectul Joule-Thomson este absent. Efectul Joule-Thomson are un număr însemnat de aplicaŃii practice în termotehnică şi în teoria turbinelor
4.9 Transformări de fază
Transformarile de fază sunt procese termodinamice care au ca urmare schimbări ale fazei într-un sistem termodinamic. O fază este o parte a unui sistem termodinamic care prezintă aceeaşi compoziŃie şi aceleaşi proprietăŃi fizice în toate punctele sale separată de alte părŃi ale sistemului de o suprafaŃă de separaŃie. La traversarea acestei suprafeŃe de separaŃie proprietăŃile sistemului suferă salturi. Dacă sistemul este compus dintr-un lichid şi vaporii săi, atunci lichidul reprezintă o faza. iar vaporii alta. Majoritatea substanŃelor au doar o singură fază solidă, una lichidă şi una gazoasă. Există însă substanŃe care în stare solidă pot prezenta structuri cristaline diferite, adică mai multe faze corespunzătoare aceleiaşi stări de agregare solide, deci nu trebuie confundată faza cu starea de agregare, deşi schimbările stării de agregare constituie cazuri particulare de transformări de fază. Transformările de fază, ele se clasifică în două tipuri:
Transformări de fază de speŃa I, care sunt transformările la care transformarea se produce la o temperatură constantă ,schimbând cu mediul o căldură numită căldură latentă. Dacă se notează căldura latentă schimbată cu
lQ şi cu m masa corpului care suferă
transformarea, căldura latentă a unităŃii de masă se va numi căldură latentă specifică .
lQ
mλ = (4.285)
Pentru corpurile omogene din punctul d vedere a compoziŃiei, căldura latentă specifică este o constantă de material.
Transformările de fază de speŃa I cele mai importante sunt vaporizarea-condensarea, topirea-solidificarea, sublimarea-desublimarea, etc.
Transfomările de speŃa a II-a, sunt acele transformări în care schimbul de căldură nu are loc şi se produc vatiaŃii bruşte ale coeficienŃilre termodinamici . Aceste transformări de fază sunt de cele mai multe ori legate de de ordonarea în structuri cristaline. Din multitudinea de transformări de fază în continuare vor fi prezentate doar transformările de fază care însoŃesc schimbarea stării de agregare gaz-lichid.

117
4.9.1 Lichefierea gazelor.
O dată cu descoperirea structurii moleculare a substanŃei, a apărut ideea că lichidele nu sunt altceva decât gaze puternic comprimate.Primele experimente făcute în acest sens de Faraday au arătat că unele gaze cum sunt dioxidul de carbon, amoniacul, butanul, etc,se lichefiează dacă sunt comprimate suficient dar altele cum sunt oxigenul, hidrogenul sau azotul rămân în stare gazoasă chiar dacă sunt comprimate la presiuni foarte mari, la temperatura camerei.
În 1869 , Andrews a studiat variaŃia presiunii dioxidului de carbon în funcŃie de
volum în condiŃii izoterme. 8tudiind lichefierea dioxidului de carbon la diferite
temperaturi, el a obŃinut familia de curbe prezentate în figura (4.18), fiecare curbă
reprezintând o transformare izotermă a gazului efectuatä la o anumită temperatură.
Figura 4.18
Ana1izând izoterma corespunzătoare temperaturii de 130 C, se constată că ea este formată
din trei porŃiuni. PorŃiunea D A se apropie de aspectul unei hiperbole echilatere, ea ne
arată că micşorând volumul, presiunea creşte (figura 4.18) până în punctul A. În acest
punct începe lichefierea şi pe măsură ce se micşorează volumul, o cantitate tot mai mare
de gaz se lichefiază, şi din acest motiv presiunea se menŃine constantă. Când volumul
ajunge la valoarea corespunzătoare abscisei punctului B, tot gazu1 s-a 1ichefiat. În acest
timp forŃele interne de efecuează lucru mecanic, realizând legături între particule,
formând o structură specifică stării lichide. Lucrul efectuat de forŃele interne se eliberează
sub forma căldurii latente. Presiunea corespunzătoare părŃii orizontale AB rămine
constantă (46 atm), şi gazul capătă proprietăŃile vaporilor saturanŃi. Aceşti vapori sunt cei
care sunt în contact cu lichidul din care provin şi care nu îşi modifică presiunea la variaŃia
volumului pentru că la reducerea volumului un număr tot mai mare de particule trec prin
suprafaŃa de separaŃie în faza lichidă, şi nu mai contribuie la ciocnirile cu pereŃii incintei. Stabilirea echilibrului dintre lichid şi vapori este rezultatul a două procere care se desfăşoară în sens contrar, trecerea moleculelor din lichid în gaz, şi trecerea moleculelor din gaz în lichid .Aceste două procese au loc independent. Numărul de molecule care

118
pleacă din masa de lichid în masa de vapori depinde de densitatea lichidului, iar numărul de molecule care pleacă din masa de vapori în masa de lichid depinde de densitatea vaporilor.łinând seama de compresibilitatea redusă a lichidului, densitatea acestuia variază foarte puŃin cu variaŃia presiunii gazului.Se poate considera aproximativ că variază numai vulumul şi masa fazei lichide nu şi densitatea acesteia. Presiunea se menŃine constantă până 1a transformarea totalä a gazului în lichid. În timpul lichefierii presiunea fiind constantă, modificarea volumului are loc prin modificarea raportului dintre masa lichidului şi a vaporilor. Continuând să se micşoreze volumul, graficul BC arată că presiunea creşte rapid, fiindcă lichidul. este foarte puŃin compresibil. Pentru temperaturi mari, aspectul curbelor izoterme se modifică, pa1ierul, A 1B1 micşorându-se până la izoterma coreopunzătoare tcmperaturii de 31,1 0C la care palierul se reduce la un punct C. În acest punct izoterma prezintă un punct de inflexiune. Temperatura Tc= 31,1 0C se numeşte temperatura critică a gazului, iar volumul şi presiunea corespunzătoare se numesc volum critic şi presiune critică. Pentru temperatuni mai ridicate, aspectul curbelor se apropie de cel al izotermelor gazelor ideale. Dacă se unesc punctele B B1 B2 C A2 A1 A, rezultă curba numită curba de saturaŃie. Această curbă împreună cu izoterma critică, împarte planul pV în patru regiuni ca în figura 4.19.
Figura 4.19 Regiunea 1 corespunde stärii gazoase. Gazul nu se mai poate lichfia oricare ar fi presiunea. Regiunea 2, cuprinsă între izoterma critică, curba de saturaŃe şi axa volumelor corespunde vaporilor nesaturaŃi, care au un comportament descris de ecuaŃia van der Waals şi care se pot lichefia prin comprimare. Regiunea 3 corespunde vaporilor saturanŃi, adică unor vapori aflaŃi în contact cu 1ichidu1din care provin şi cu care sunt în echilibru. Regiunea 4, între ordonată, izoterma critică şi curba de saturaŃie, corespunde stării
lichide a substanŃei respective. Temperatura critică este temperatura deasupra căreia un gaz nu mai poate fi lichefiat, oricât de mare ar fi presiunea. Presiunea critică este presiunea minimă la care un gaz se lichefiazä la temperatura critică. Studiul graficului permite să se tragă tragă încă o concluzie importantă şi anume că un gaz răcit sub temperatura critică necesită pentru lichiefiere presiuni cu atât mai mici cu cât se află la o temperaturä mai scăzută. La temperatura critică nu se mai poate face distincŃie între starea lichidă şi ceea gazoasă. SuprafaŃa de separaŃie dintre lichid şi gaz dispare, fluidul capătă un aspect opalescent şi densitatea vaporilor saturanŃi coincide cu densitatea lichidului. Acest fenomen este ilustrat de curba reprezentată în figura 4.20 numită Mathias-Cailletet. care reprezintă densitatea fluidului în funcŃie de temperatură.
ρ
C Punct critic
lichid
T
Vapori saturanŃi
vapori lichidρ ρ=

119
Figura 4.20 La temperatura critică dispare orice deosebire dintre lichid şi gaz. In jurul acestei temperaturi trecerea de la starea gazoasă la starea lichidă la ceea gazoasă şi invers se face în mod continuu. Izotermele lui Andrews au fost deduse experimental prima dată pentru dioxidul de carbon dar toate gazele reale au acelaşi comportament.Toate pot fi lichefiate dacă sunt comprimate la o presiune mai mare decât presiunea critică, cu condiŃia ca această comprimare să aibă loc la o temperatură mai mică decât temperatura critică. Între izotermele determinate experimental şi cele teoretice ale lui van der Waals există o diferenŃă netă datorită diferenŃelor calitative existente între stările de gaz şi lichid. Dacă se explicitează presiunea din ecuaŃia de stare van der Waals şi se reprezintă grafic, la valoari constante ale temperaturii, se obŃine graficul din figura 4.21
Figura 4.21 Dacă se ordonează termenii din ecuaŃia van der Waals după puterile volumului se obŃine pentru un kilomol de gaz , următoarea ecuaŃie de gradul trei.
3 2 0RT a ab
V b V Vp p p
− + + − =
(4.286)
Pentru o anumită presiune şi temperatură, această ecuaŃie are trei rădăcini care pot
fi toate trei reale, una reală şi două complex conjugate sau toate trei complexe. Dacă temperatura este mai mică decât temperatura critică, o paralelă la axa volumelor p1 =constant taie izoterma corespunzătoare din graficul presiunii în trei puncte care corespund celor trei rădăcini reale.Acest comportament nu se regăseşte în realitate căci la gazele reale curba BMNA este înlocuită cu palierul AB corespunzător lichefierii
120
gazului.În plus apare anomalia că pe porŃiunea MN a curbei presiunea creste odată cu creşterea volumului.Pe măsură ce temperatura creşte, cele trei rădăcini se apropie una de alta pentru ca la temperatura critică să se confunde. Acesată obsrevaŃie permite determinarea coordonatelor punctului critic, căci în acest punct izoterma critică are un punct de inflexiune cu tangenta orizontală. Din ecuaŃia van der Waals se explicitează presiunea ,
2
RT ap
V b V= −
− (4.287)
şi se calculează derivatele care în punctul de inflexiune se anulează
( )2 3
20c
c cc
p RT a
V VV b
∂ = − + = ∂ − (4.288)
şi
( )
2
32 4
2 60c
cc c
p RT a
V VV b
∂= − = ∂ −
(4.290)
Rezolvând sistemul rezultă următoarele coordonatele ale punctului critic pentru un kilomol.
227c
ap
b= ; 3cV b= şi,
8
27c
aT
bR= (4.291)
Se remarcă faptul că coordonatele punctului critic depind de natura gazului prin intermediul constantelor a şi b. O serie de puncte din domeniul BMNA pot totuşi să fie realizate pe cale experimentală. Se disting mai multe posibi1ităŃi, din care mai importante sunt urmãtoarele. -Într-un spapŃiu lipsit de praf şi de sarcini electrice se pot obŃine vapori la o presiune mai. mare decât presiunea vaporilor saturanŃi p0, corespunzătoare temperaturii T0. Vaporii în această situaŃie sunt numiŃi vapori suprasaturanŃi. Deşi gazV V⟨ substanŃa continuă să rămână în faza gazoasă, (partea NA din regiunea în dreapta maximului, în care presiunea scade deşi volumul creşte) Dacă în masa de gaz suprasaturant apar particule străine sau ioni aceştia devin centrii de condensare în jurul cărora se vor aduna picături microscopice de lichid, care vor produca condensarea în avalanşă în întreaga masă de substanŃă. Astfel se formează dârele de condensare care însoŃesc avioanele aflat în zbor la mare înălŃime şi dârele de ceaŃă care urmează traiectoriile particulelor elementare în camerele du ceaŃă utilzate în fizica nucleară. -Regiunea BM a izotermei corespunzătoare unei situaŃii, când substanŃa rămâne în stare lichidă sub presiune mai mică decât presiunea de vapori p0 şi la lichidV V⟩ fără ca ea sä treacă în stare de vapori. Starea aceasta este denumită stare de lichid supraîncălzit. Dacă în lichidul supraîncălzit apar dintr-un motiv oarecare particule străine sau ioni, în jurul acestora se vor aduna bule microscopice de gaz. Aceste bule vor iniŃia fierberea în întreaga masă de fluid. Bazat pe acest fenomen este camera cu bule, care în fizica nucleară , vizualizează traiectora particulelor printr-o dâră de bule produse de acestea într-un lichid supraîncălzit.
-Regiunea MN corespunde unei stări metastabile a substanŃei, care nu poate fi

121
realizată. Se va trece brusc în una din cele două stări anterioare.





























