Embed Size (px)
Citation preview

UNIVERZITET CRNE GOREELEKTROTEHNIČKI FAKULTET
Bežični monitoring kretanja i biosignala
-specijalistički rad-
Kandidat: Kojović Nikola
Mentor: Prof.dr. Stojanović Radovan
Podgorica, jun 2011

UNIVERZITET CRNE GORE
ELEKTROTEHNIČKI FAKULTET
AKADEMSKE SPECIJALISTIČKE STUDIJE – SMJER ELEKTRONIKA
Broj _____________________________________
Podgorica, _____________________ 2011. godine
Bežični monitoring kretanja i biosignala
- Specijalistički rad -
Datum izdavanja rada: Datum predaje rada:
Podgorica, ____________ 2011. godine Podgorica, ____________ 2011.godine
Mentor: Student:
_______________________________ _______________________________
Prof.dr. Stojanović Radovan Kojović Nikola
I
IZJAVA O SAMOSTALNOM RADU
Ovim izjavljujem da sam specijastički rad uradio samostalno, uz pomoć mentora i navedene literature.
Kandidat
__________________________
Diplomski rad je odbranjen dana ______ . ______ . 2011. godine pred komisijom u sastavu:
1. ______________________________(predsjednik)
2. ______________________________(mentor)
3. ______________________________(član )
sa ocjenom _______(____________).
II

Sažetak
U ovom radu razmatraju se svi aspekti sistema bežičnog monitoringa kretanja i biosignala, i to kao skup odvojenih cjelina koje su međusobno povezane u istome cilju. Ovakav monitoring, kao procedura, mora imati pravilno prikupljanje, prosleđivanje i obradu prikupljenih podataka jer oblast u kojoj djeluje ne trpi greške. Na kvaliteta prikupljanja podataka i kvalitet samog podatka znatno utiče poznavanje fenomena koji se posmatra, u datim slučajevima EKG, EMG i kretanje čovjeka. Uticaj pravilne interpretacije prikupljenih podataka nad ovim fenomenima u veoma kratkom vremenu može da ima povoljan efekat. Ovakav monitoring je sve više od interesa i teži ka tome da postane standardna procedura. Kao takav veoma važno je poznavati svaki njegov dio u cilju lakše implementacije i buduće optimizacije. Kao što je već navedeno ovdje posmatrani fenomeni su EKG, EMG i kretanje čovjeka, a izbor da budu od interesa u ovom radu leži u tome da informacije o njima mogu biti lako prikupljene, proslijeđene i obrađene za veoma kratko vrijeme, čak sta više i u realnom vremenu. Na kraju rada prikazana su rešenja bazirana na: Shimmer modulu i softverskoj platformi koja ga prati, i samostalno rešenje u matlabu koje takođe koristi Shimmer modul .
Ključne riječi: EKG, EMG, Kretanje, BlueTooth, Wireless machine, Shimmer, ZigBee, Topologije, Pan-Tompkins.
Abstrakt
In this paper will be displayed all aspects regarding wireless monitoring of movement and biosignal, as group of individual parts that are interconnected in the same goal. This type of monitoring, as procedure, must have accurate gathering, passing and processing of collected data because this particular environment of work is not kind to errors. Quality of data gathering and quality of data itself can be affected allot if observed phenomena is known, in given cases ECG, EMG and movement of a man. Influence of right data interpretation on observed phenomena in short time can have drastic positive influence. This type of monitoring is more and more of interest and it going in direction to become a standardized procedure. It is of great importance that every part of procedure is know in details in goal of easy implementation and future optimization. As it already being said, phenomena that we watched are ECG, EMG and movement of a man, choice of monitoring this particular phenomena is that information about them can be easy acquired, passed and processed in very short time, even in real time. At very end of this paper solution will be displayed based on: Shimmer module and his native software platform and solution based on matalb code that also use Shimmer module.
Keywords: EKG, EMG, Movement, BlueTooth, Wireless machine, Shimmer, ZigBee, Topology, Pan-Tompkins.
III

Skraćenice:
A
AC Alternating currentACC 1 podaci sa ADCaccelerometra 1ACC 2 podaci sa ADCaccelerometra 2ACC 3 podaci sa ADCaccelerometra 3ADC Analog to digital converterAD-HOC Jedan na jedanaVF Izvedeni referentni signal srcaaVL Izvedeni referentni signal srcaaVR Izvedeni referentni signal srca
B
BD Biometrical DataBOF Beging of frame
C
CRC Cyclic redundancy checkCSV Coma Separated ValuesCTP Cordless Telephonz ProfileCVSD Varijabilna delta modulacija
D
DAC Digital to analog converterDC Direct currentDevA Uređaj ADevB Uređaj BDNP Dialup Networking ProfileDPSK Differential Phase Shift keyingDQPSK Differential Quadrature Phase Shift Keying
E
EEG ElectroencephalographyEKG ElektrogardiogramEKG 1 podaci sa EKG1 ADCEKG 2 podaci sa EKG2 ADCEMG ElektromijografijaEOF End of frame
F
FFD Full function deviceFH Frequency-hoppingFHSS Frequency-hopping spread spectrumFP Fax ProfileFTP File Transfer Profile
G
G GlukozaGAP Generic Access ProfileGMSK Gaussian minimum shift keyingGOEP General object exchangeGPIO General purpose input output
H
HCI Host Controller InterfaceHSS Headset Profile
I
I kanal Signal srcaI/O Input OutputI2C Inter-ICID IdentificationII kanal Signal srcaIII kanal Signal srcaIP Intercom Profile
L
L2CAP Logical link control and adaptation protocolLA Lijeva rukaLAD Prednja lijeva silazna arterijaLAP Lan Access ProfileLCA Lijeva koronarna arterijaLED Light emiting diodeLL Lijeva nogaLMP Link manager protocolLR-WPAN Low-Rate Wireless Personal Area NetworksM
IV

MAC Media AccessMEMS Microelectromechanical systems
O
OBEX Object Exchange OPP Object push ProfileOSI Open Systems Interconnection
P
P talas Dio EKG signalaP2P Pear to PearPAN Personal Area NetvorkPCM Impulsna kodna modulacijaPHY PhysicalPOS Point of salePSK Phase Shift keying
Q
QRS Komplex Dio EKG signala
R
RA Desna RukaRAM Randomaccess memoryRCA Desna koronarna arterijaRFCOMM Radio Frequency Communication
RFD Reduced function deviceRL Desna nogaROM Read onlz memoryRS232 Serijski portRTOS Real time operating system
S
SBC Sub-Band kodekSDK Software Development KitSDP Service discovery protocolSDP Service Discovery ProtocolSMD Sport medicine dataSP Synchronization ProfileSPI Serial Peripheral Interface SPO2 Zasićenje kisonkomSPP Serial port profile
T
T TemperaturaT talas Dio EKG signalaTDD Time division DuplexTDMA Time division multiple access
U
UART Universal asynchronous receiver/transmitter
USART Universal synchronous/asynchronous receiver-transmitter
USB Universal Serial Buss
V
V1 Pozicija EKG elektrodeV2 Pozicija EKG elektrodeV3 Pozicija EKG elektrodeV4 Pozicija EKG elektrodeV5 Pozicija EKG elektrodeV6 Pozicija EKG elektrode
W
WCET Worst-case execution time
V

Popis slika
Broj slike Naslov StranaSlika 1.1 Prikaz P talasa 2Slika 1.2 Prikaz Q-R-S talasa 2Slika 1.3 Prikaz T talasa 3Slika 1.4 Prikaz pozicija elektroda dvanaesto-kanalnog EKG-a 3Slika 1.5 Posmatrani signali u odnosu na ravan srca 4Slika 1.6 Prikaz mišića srca i povezanost sa signalima koji ga opisuju 5Slika 1.7 Rukavica sa senzorima pritiska 7Slika 1.8 Senzor ugla 7Slika 1.9 Kretanje tijela sa mrežom senzora 8Slika 1.10 Intramuskularna elektromijografija 9Slika 1.11 Površinski EMG djelova tijela 10Slika 1.12 Prelazak na aktivne elektrode 10Slika 3.1 Dizajn BlueTooth profila prema specifikaciji 16Slika 3.2 Profil BlueTooth standarda 18Slika 4.1 Princip Kreiranja podrške za BlueTooth na mikrokontrolerima 28Slika 4.2 BlueTooth moduli 29Slika 5.1 Piconet topologija 30Slika 5.2 Scatternet mrežna topologija 31Slika 6.1 Primjena BlueTootha 32Slika 10.1 Prikaz softvera BSL430 48Slika 10.2 Hardverski dizajn Shimmer modula 50Slika 11.1 Pravilno postavljanje Shimmer modula 52Slika 11.2 Blok dijagram putanje razvoja u Bliomobius platformi 53Slika 11.3 Prikaz Eyasweb softvera 54Slika 11.4 Rad u Eyasweb-u Shimmer blok 55Slika 11.5 Rad u Eyasweb-u Bang generator blok 56Slika 11.6 Rad u Eyasweb-u Delay blok 57Slika 11.7 Rad u Eyasweb-u Input selector blok 58Slika 11.8 Rad u Eyasweb-u Constant generator blok 58Slika 11.9 Rad u Eyasweb-u FastDataBufferMatrixInput blok 59Slika 11.10 Rad u Eyasweb-u prikaz statusa Shimmer modula 59Slika 11.11 Rad u Eyasweb-u, šema povezanih blokova 60Slika 11.12 Biomobius GUI dizajner 61Slika 11.13 Prikaz gotovog projekta za monitoring kretanja 61Slika 11.14 Shimmer modul sa oznakama elektroda 62Slika 11.15 Matlab softver za primanje i analizu signala sa Shimmer modula 62Slika 11.16 Blok dijagram Wirelles mašine 63Slika 11.17 Simulacija Shimmer modula i njegove uloge 63Slika 11.18 Algoritam softvera za analizu u Matlabu 64Slika 11.19 Dekodovanje frejma Shimmer modula 66
VI

Slika 11.20 koraci u Pan-Tompkinsovoj metodi QRS detekcije 66Slika 11.21 Normalizacija signala 66
Slika 11.22 LP filtar 67Slika 11.23 HP filtar 67Slika 11.24 Filtar derivacije 68Slika 11.25 Kvadriranje 68Slika 11.26 Integracija i oblast detekcije 69
Popis Tabela
Broj tabele NaslovStran
a
Tabela 1.1 Prikaz kanala EKG-a i njihovi grafici 4Tabela 2.1 Karakteristike BlueTooth sistema 12Tabela 3.1 Glavni elementi BlueTooth arhitekture 17Tabela 3.2 Osobine generičkog pristupnog profila 19Tabela 3.3 Ostali BlueTooth profili 25Tabela 7.1 Poredbena tablea BlueTooth i ZigBee 36Tabela 10.1 Osobine Shimmer platforme 47Tabela 10.2 Opis paketa unutar frejma komunikacije Shimmer modula 51
VII

Uvod
U cilju daljeg razvoja u nekoj stručno specijalizovanoj oblasti, gdje su poznati ciljevi ali ne i način postizanja istih, stvara se potreba da različite grane prirodnih nauka počnu da se preklapaju na takav način da se kreira uska saradnja među njima. Ta saradnja dovodi do međusobne koristi u kojoj svaka od strana ima željene rezultate i ostvarene postavljene ciljeve. Takva veza se stvorila između različitih grana medicine i elektrotehnike.
U ovom radu će biti objašnjeno na koji način je uspostavljena ta veza, koji su njeni ciljevi i putevi ka tom cilju, gledajući sa strane elektrotehnike kao nauke, elektronike kao oblasti i medicinske elektronike kao grane te oblasti. Generalno ova metoda prati uspostavljene rute koje su definisane zbog limita trenutne tehnologije i metode rada, kao i iskustvo u rješavanju problema i poznavanje praćenog fenomena iz kojeg se želi izvući korisna informacija .
Biosignali i motorika čovjeka su dvije pojave u medicini koji se dosta lako mjere, obrađuju i interpretiraju. Od interpretacije tih informacija se znatno može u veoma kratkom vremenu povećati kvalitet života pacijenta ili performanse posmatranog fenomena nad pacijentom. Naša izmjerena informacija je uzrokovana nekim fenomenom, i kao takav mi se nećemo baviti zašto je došlo do tog fenomena nego mjerenjem vrijednosti istog ili neke mjerljive veličine istog koja ga direktno ili indirektno opisuje.
Ovdje će se posmatrati srce i mjerljivi fenomeni nad njime, kao i motorika tijela čovjeka bilo da li je u pitanju sportska medicina ili psihofizička rehabilitacija pacijenta. Ukratko će biti opisano srce kao aparat nad kojim vršimo mjerenje kao i generalni opis motorike koju ćemo pratiti posmatrano sa stanovišta fizičke interpretacije.
Ovakav sistem, i svi slični njemu, se posmatra kao sistem sa povratnom spregom, bilo da je pozitivna ili negativna, jer način fizičke interpretacije fenomena, prenosa informacija mjerenja, prihvatanja i obrade informacije, zaključivanja šta treba unaprijediti i sanirati, sama sanacija ili optimizacija nad posmatranim objektom našeg interesovanja kreira zatvoreni krug. Cilj je da vrijeme koje je potrebno da se ovaj krug obiđe bude što kraće, zbog rasterećenja resursa, ljudstva i postizanja optimuma u odnosu kvaliteta i kvantiteta.
VIII

Sadržaj: 1. Posmatrani fenomeni.............................................................................................................................1
1.1 Srce, elektrokardiografija (EKG)...................................................................................................1
1.2 Motorika i elektromijografija (EMG)............................................................................................6
2. BlueTooth Primjena.............................................................................................................................11
2.1 Motivacija i razvoj bežičnih tehnologija......................................................................................11
2.2 BlueTooth karakteristike..............................................................................................................12
2.3 Primjena BlueTooth baziranih uređaja........................................................................................12
2.4 Mobilna obrada informacija.........................................................................................................13
2.5 Prednosti i mane BlueTooth baziranih uređaja............................................................................14
3. BlueTooth – specifikacija i profili.......................................................................................................16
3.1 Specifikacija BlueTooth protokolnih nivoa.................................................................................16
3.2 BlueTooth profili.........................................................................................................................18
3.3 Generički pristupni profil (Generic Access Profile)....................................................................19
3.3.1 Pregled profila......................................................................................................................19
3.3.2 Korisnički aspekt.................................................................................................................20
3.3.3 Način rada............................................................................................................................20
3.4 Otkrivanje mogućih profila/usluga..............................................................................................21
3.4.1 Pregled profila......................................................................................................................21
3.5 Profil serijskog porta....................................................................................................................22
3.5.1 Pregled profila......................................................................................................................22
3.5.2 Pregled procedura pri komunikaciji.....................................................................................24
3.5.3 Režimi pri čuvanju energije i gubitku veze.........................................................................24
3.6 Ostali profili predefinisani BlueTooth specifikacijom................................................................25
4. Mikrokontrolerska komponenta primjene BlueTooth.........................................................................26
4.1 HCI Postojeći - HCI Nepostojeći BlueTooth moduli..................................................................27
4.2 Mikrokontrolerski USB BlueTooth modul..................................................................................28
4.3 Mikrokontrolerski GPIO/SPI/I2C/High-Speed UART BlueTooth modul..................................29
4.4 USART/UART/RS232 BlueTooth modul...................................................................................29
5. BlueTooth mrežna topologija..............................................................................................................30
5.1 Piconet topologija........................................................................................................................30
5.2 Scatternet topologija....................................................................................................................31
IX

6. Primjena BlueTooth uređaja................................................................................................................32
6.1 Primjena u medicini.....................................................................................................................32
6.2 Lokalni i daljinski monitoring pacijenata....................................................................................33
6.3 Bežično daljinsko očitavanje biometrijskih podataka..................................................................33
7. Primjer sličnih komunikacija i poređenje sa BlueTooth......................................................................34
7.1 ZigBee-opis rada i topologija.......................................................................................................34
7.2 Poređenje BlueTootha i ZigBee sistema......................................................................................36
7.3 Zaključak primjene BlueTooth i ZigBee sistema........................................................................37
8. Wireless mašina...................................................................................................................................38
8.1 Wireless kontrolni sistem.............................................................................................................38
8.2 Wireless monitoring sistem.........................................................................................................39
8.3 Neke od mogućih primjena Wireless mašina u medicini.............................................................41
9. RTOS...................................................................................................................................................42
9.1 Definicija RTOS-a.......................................................................................................................42
9.2 Razlozi korišćenja RTOS-a..........................................................................................................42
9.3 Osobine i funkcije RTOS-a..........................................................................................................42
9.4 Upravljanje resursima sistema.....................................................................................................43
9.5 Hard i SOFT REAL-TIME..........................................................................................................43
9.6 Multitasking.................................................................................................................................44
9.7 Prioriteti i previđanja...................................................................................................................44
9.8 Modeli rezervisanja i predviđanja prioriteta................................................................................44
9.9 Klase kernela................................................................................................................................45
9.10 Prekid i pojava važnog podatka i njegovo upravljanje................................................................45
9.11 Akcija i kašnjenje.........................................................................................................................46
10. Shimmer platforma..........................................................................................................................47
10.1 Osobine platforme........................................................................................................................47
10.2 Start sistema i njegova konfiguracija za rad................................................................................48
10.3 Hardverski opis Shimmer modula...............................................................................................50
10.4 Opis format paketa komunikacije Shimmer modula...................................................................51
11. Predložena rješenja..........................................................................................................................52
11.1 Pravilno povezivanje i pozicioniranje Shimmer modula.............................................................52
11.2 Riješenje korišćenjem Biomobius-a............................................................................................53
11.2.1 Monitoring kretanja.............................................................................................................53
X

11.2.1.1 Kontrola Shimmer modula...............................................................................................55
11.2.1.2 Prihvatanje podataka sa accelerometara..........................................................................58
11.2.1.3 Očitavanje statusa Shimmer modula................................................................................59
11.2.1.4 Grafički prikaz informacija..............................................................................................61
11.3 Samostalno rješenje korišćenjem Matlaba...................................................................................62
11.3.1 Blok dijagram primijenjenog metoda..................................................................................63
11.3.2 Algoritam softwera za analizu u Matlabu............................................................................64
11.3.2.1 COM PortX......................................................................................................................64
11.3.2.2 Inicijalizacija svih promenljivih......................................................................................65
11.3.2.3 Pravilno dekodovanje paketa i prepoznavanje korisne informacije................................65
11.3.2.4 Pan-Tompkinsov metod za analizu QRS kompleksa.......................................................66
Zaključak......................................................................................................................................................70
LITERATURA:...........................................................................................................................................71
XI

Bežični monitoring kretanja i biosignala
1. Posmatrani fenomeni
1.1 Srce, elektrokardiografija (EKG)
Srce je četvorokomorni mišić čija funkcija je da pumpa krv kroz tijelo. U realnosti srce se može predstaviti kao dvije cjeline, lijeva i desna strana koja kuca istovremeno. Svaka od ove dvije strane ima dvije komore, manju gornju komoru atrium i veću donju komoru ventrikulu. Desni atrium, desna ventrikula, lijevi atrium i lijeva ventrikula su pravilni nazivi ovih komora. Ovako imenovan niz predstavlja i putanju protoka krvi kroz srce.
Sami postupak kretanja krvi kroz srce je od važnosti pa zato će i biti ukratko opisan:
Desni atrium prima krv koja je prošla kroz cjelokupno tijelo i u kojoj su kiseonik i hranljive materije iscrpljene. Ta krv se vraća preko dvije velike vene, superior vena cava vraća krv iz glave vrata, ruku i gornjeg dijela torzoa, i inferior vena cava koja vraća krv iz ostalog dijela tijela.
Desni atrium pumpa ovu krv u desnu ventrikulu koja samo trenutak kasnije pumpa ovu krv kroz krvne sudove pluća.
Pluća u ovom procesu imaju dvostruku ulogu: da zasićuju krv kiseonikom izlaganjem vazduhu koji udišemo i da oslobodi ugljendioksid iz krvi koji se nagomilao usled raznih metaboličkih procesa. Kada krv prođe kroz pluća, ona ulazi u lijevi atrium koji je prosleđuje u lijevu ventrikulu.
Lijeva ventrikula ispumpava krv nazad u cirkularni sistem krvnih sudova, arterije i vene. Krv izlazi iz lijeve ventrikule preko aorte koja predstavlja najveću arteriju u tijelu. Pošto lijeva ventrikula mora stvoriti dovoljan pritisak da krv protiče kroz cjelokupno tijelo zaključuje se da je ona ekstremno jaka pumpa. Odavde slijedi da kada se mjeri krvni pritisak, mjeri se pritisak koji stvara lijeva ventrikula.
Srce takođe zahtijeva krv da bi funkcionisalo. Krv ulazi u srčane mišiće preko grupe arterija koje izlaze iz aorte veoma blizu spoja srca i aorte i zovu koronarne arterije. Kada iz nekog razloga dođe do prekida protoka kroz koronarne arterije tada taj dio mišića srca počinje da izumire. Ako se ovo ne spriječi tada srce gubi svoju sposobnost i snagu da pumpa krv i posljedice su fatalne. Kada je zastoj krvi kratkoročan, simptomi se zovu angina, i nema permanentnih posljedica, ali ako je zastoj dugoročan posljedice postoje i djelovi mišića srca izumiru. Ovo nazivamo srčanim napadom ili mijokardijalna infrakcija-infarkt.
Nervi srca su odvojeni od ostatka nervnog sistema tijela zbog svoje važnosti i kao takvi su apsolutno nezavisni od stanja nervnog sistema tijela. Mreža nerava koja se prostire kroz sve komore srca pokreću impulse koji ga tjeraju da ono usklađeno radi i obavlja svoju funkciju. Srce normalno radi brzinom od 60 do 100 otkucaja u minuti. Ova varijacija zavisi od fizičke spremnosti čovjeka. Brzina otkucaja zavisi od specijalizovanih ćelija u srcu koje su locirane u desnom atriumu. One rade automatski i nezavisno od nervnog sistema.
Svaki put kada dođe do otkucaja, obje arterije se skupljaju i impuls putuje kroz atrium do dijela srca koji se zove atrioventikularni čvor koji leži u zidu između dvije ventrikule. Ovaj čvor služi
1

Bežični monitoring kretanja i biosignala
kao tačka od koje se dalje prosljeđuju električni impulsi. Iz atrioventikularnog čvora električni talas putuje do obje ventrikule izazivajući njihovo skupljanje i ispumpavanje krvi. Vremenska razlika između kontrakcija atriuma i ventrikula je od 0.12 do 0.2 sekunde. Ovo rastojanje je tajmirano tako da krv optimalno pređe između atriuma i ventrikula. Vrijeme kraće ili duže od ovoga upućuje na moguće srčane probleme.
EKG bilježi električnu aktivnost tokom vremena koja se pojavljuje usled kontrakcije mišića u atriumu i ventrikuli.
Kontrakcije oba atriuma se prikazuju kao P talas. (sl.1.1)
Slika 1.1. Prikaz P talasa
Kontrakcije ventrikula se prikazuju kao serija od tri talasa Q-R-S, poznatiji kao QRS komplex. (sl. 1.2)
Slika 1.2. Prikaz Q-R-S Talasa
2

Bežični monitoring kretanja i biosignala
Treći i zadnji talas je poznat kao T talas i odražava ponovno punjenje mišića ventrikule za sledeću srčanu kontrakciju (repolarizacija). (sl. 1.3)
Slika 1.3. Prikaz T talasa
Sa fizičkog aspekta EKG funkcioniše tako sto detektuje i pojačava male električne promjene na površini kože koji se pojavljuju kada se srčani mišić depolarizuje tokom svakog svog okucaja. Kada srce miruje mišić ima potencijal i polarizovan je ka spoljašnjem zidu. Smanjivanje ovog potencijala odnosno depolarizacija izaziva kontrakcije mišića. Ove promjene se detektuju kao mali rastući i opadajući naponski signali između dvije elektrode. Uobičajeno je da se koriste više od dvije elektrode i to tako da su kombinovane u parovima. Postoji nekoliko različitih načina snimanja sa različitim brojem elektroda i to sa 3 kanala, 5 kanala i 12 kanala. Najvjerodostojniji EKG je sa 12 kanala koji uvjek ima neki medijum koji ga zapisuje, dok sa 3 ili 5 kanala se koriste kao privremeni monitoring i kao takav najčešće nema zapis. EKG sa 12 kanala ima najčešće 10 elektroda koje se označavaju i postavljaju kao na slici 1.4.
RA-Desna Ruka
LA-Lijeva Ruka
RL-Desna Noga
LL-Lijeva Noga
V1-Između 4. i 5. rebra desno od prsne kosti
V2-Između 4. i 5. rebra lijevo od prsne kosti
V3-Između elektroda V2 i V4
V4-Između 5. i 6. rebra
V5-Horizontalno sa V4 pomereno udesno
V6-Horizontalno sa V5 pomereno udesno
Slika 1.4. Prikaz pozicija elektroda dvanaesto-kanalnog EKG-a
3

Bežični monitoring kretanja i biosignala
U zavisnosti od kombinacije elektroda i da li željeni kanal je unipolaran ili bipolaran dobijamo informacije o različitim segmentima srca. Bipolarni signali su I, II, III odnosno takozvani kanali udova a svi ostali kanali su unipolarni. Njihove interpretacije i uopsteni oblik signala su dati u tabeli 1.1 u odnosu na ravan posmatranja srca. (sl 1.5)
I kanal predstavlja naponsku razliku između lijeve ruke (LA) i referentne elektrode desne ruke (RA) i posmatra se u ravni y,z.
I=LA-RA
II kanal predstavlja naponsku razliku između lijeve noge (LL) i referentne elektrode desne ruke (RA) i posmatra se u ravni y,z. II=LL-RA
II kanal predstavlja naponsku razliku između lijeve noge (LL) i referentne elektrode lijeve ruke (LA) i posmatra se u ravni y,z.
III=LL-LA
V1 kanal predstavlja potencijal elektrode V1 i posmatra se u ravni x,y. V1
V2 kanal predstavlja potencijal elektrode V2 i posmatra se u ravni x,y. V2
V3 kanal predstavlja potencijal elektrode V3 i posmatra se u ravni x,y. V3
V4 kanal predstavlja potencijal elektrode V4 i posmatra se u ravni x,y. V4
V5 kanal predstavlja potencijal elektrode V5 i posmatra se u ravni x,y. V5
V6 kanal predstavlja potencijal elektrode V6 i posmatra se u ravni x,y. V6
aVR predstavlja pojačani referentni signal i posmatra se u ravni y,z. aVR=RA-0.5*(LA+LL)
aVL predstavlja pojačani referentni signal i posmatra se u ravni y,z. aVL=LA-0.5*(RA+LL)
aVF predstavlja pojačani referentni signal i posmatra se u ravni y,z. aVF= LL-0.5*(LA+RA)
Tabela 1.1 Prikaz kanala i njihovi grafici
Slika 1.5 Posmatrani signali u odnosu na ravan srca
4

Bežični monitoring kretanja i biosignala
Svi ovi kanali su dobijeni sa željom da se sazna više o stanju srca. A koji kanal nosi koju informaciju o srcu i njegovom stanju je dato slikom 1.6 u odnosu na ravan srca prema slici 1.5.
a) b) c) d) e)RCA-desna koronarna arterijaLCA-lijeva koronaran arterijaLAD-prednja lijeva spustena arterijaCx-Circumflex arterija
I, aVL, V5,V6 V3,V4 V1,V2 II,III,aVF
Slika 1.6 Prikaz mišića srca i povezanost sa signalima koji ga opisuju
EKG je neinvazivna metoda i kao takva dozvoljava da se za kratko vrijeme dođe do veoma pouzdanih informacija o srcu kao mišiću. EKG može da prikaže, predvidi i ukaže na razna oboljenja, njihove poslijedice i da znatno utiče na budući tretman pacijenta. Može da služi kao pouzdana informacija o opštem stanju pacijenta. Ovim se završava opseg interesovanja ovog rada, jer cilj je da se prikaže šta se posmatra i pokaže pravilno posmatrani fenomen dok je interpretacija informacija zadatak medicinskog osoblja.
Tro-kanalni EKG i 5. kanalni EKG je samo redukovani 12. kanalni EKG i sa manje funkcija. Tro-kanalni EKG daje nam samo I, II, III signale i na njih će biti fokus.
5

Bežični monitoring kretanja i biosignala
1.2 Motorika i elektromijografija (EMG)
Motorika tijela, koordinacija, pravilan položaj i automatizacija pokreta su glavni segmenti koji se žele pratiti i optimizovati. Ova optimizacija za ciljanu grupu ima sportiste i ljude sa urođenim ili nastalim defektima tijela. Mora se napomenuti da ovdje postoji takozvani "efekat posmatranja" koji u velikom utiče na podatke i interpretaciju istih. Ukratko "efekat posmatranja" se javlja kada pacijent ili sportista zna da je posmatran, tada on najčešće nema iste pokrete tijela kao u suprotnome. Zbog ovog efekta najčešće monitorinzi traju dugo, u cilju da čovjek koji se posmatra uđe u rutinu i da zaboravi da je posmatran. U mnogome utiče ako su senzori koji vrše mjerenje su lagani, nevidljivi čak i sta više u nekim slučajevima ti senzori i nijesu na čovjeku i apsolutno se ne primjećuju.
Žično mjerenje je skoro pa neefikasno (praktično je nemoguće odrediti položaj tijela, kretanje udova i rekciju na okolinu atelte koji trči sprint na 100 metara, plivača, vaterpoliste, rvača, boksera, košarkaša, čovjeka koji je bez jednog uda, specifično noge koji ide uz stepenice sa prostetičkim pomagalom itd.). Uvođenjem bežičnih metoda mjerenja motorike tijela, odnosno metoda gdje udovi čovjeka u bilo kojoj osi nijesu ograničeni nekim instrumentom ili elektrodom instrumenta se ogromno unaprijedila grana sportske i rehabilitacione medicine. Zašto kažemo da žično mjerenje je skoro pa neefikasno, umesto odgovora primjeri su dovoljni, kako izmjeriti položaj tijela, U većini ovih slučajeva to je skoro pa nemoguće.
Mora se napomenuti da su u ranijem periodu analize kretanja čovjeka korišćeni video optički sistemi za praćenje i analizu kretanja. Sistem se sastojao od niza infracrvenih kamera visoke rezolucije sa sposobnošću snimanja velikog broja frejmova u sekundi, pravilno pozicioniranih jedni od drugih tako da se kreira njihova mreža. Najčešće kada se jednom postave, ne realociraju se. Objekat posmatranja je morao imati specijalne markere postavljene na njemu. Ti markeri su najčešće bile trake, kuglice i flasteri koji reflektuju infracrvenu svjetlost ili infracrvene LED diode. Ako je objekat posmatranja čovjek, po pravilu je nosio odijelo sa markerima. Takav sistem jeste bežični ali je i veoma skup. Mjerenje se moralo vršiti na određenoj lokaciji koja je predhodno pripremljena i služila samo za tu svrhu. Ova činjenica je prvi faktor koji loše utiče, jer čovjek se izdvaja iz svog prirodnog okruženja u kojem djeluje. Dalje on je morao nositi specijalno odijelo kreirano samo za tu priliku što je takođe loš faktor jer se znatno utiče komfornost pri rutini kretanja. Ovaj sistem je ekstremno skup kao i njegovo održavanje, rijetko ga je ko mogao posjedovati zato su se najčešće i izinajmljivali. Time je ograničen opseg vremena u kojem se mogao koristiti, i najčešće su se izvodili određeni pokreti koji su ponavljani iznova, i u takvom slučaju "efekat posmatranja" je bio maksimalan, pa su dobijeni rezultati uzimani sa rezervom.
Razvitkom tehnologije stvorili su se jeftini uređaji sa dovoljnim ali i limitiranim sposobnostima, koji mogu da prikupe i proslijede informaciju. Napredak ovakvog monitoringa je bio očigledan i dosta brzo je došlo do proboja u svim granama sportske i rehabilitacione medicine. Cijena ovakvih uređaja dovodi do toga da se projekti baziraju više na obradi informacija (koje su postale lako i brzo dostupne) i limitirani su sposobnostima ljudi koji rade na tim projektima, dok ranije projekat je zavisio od cijene prikupljanja informacije i bio je limitiran ljudstvom zbog zahtjevnosti potrebnih materijalnih resursa. Uticaj razvoja tehnologije na razvoj sportske i rehabilitacione medicine je ogroman, stalno se dolazi do novih načina za prikupljanjem informacija, koji najčešće zavisi od kreativnosti ljudi koji se bave razvojem u toj oblasti.
6

Bežični monitoring kretanja i biosignala
Postoje 3 osnovna senzora koji se najčešće koriste u bežičnom monitoringu, a oni su:
Senzor Girometar-Promjena pravca kretanja. Precizno određuje vektor kretanja. Senzor Accelerometar-Promjena brzine kretanja u određenoj osi. Senzor mjerenja pritiska-Promjena pritiska na površinu i određivanja pritiska na površinu
najčešće u odnosu na neku relativnu vrijednost.
Ovi senzori se mogu veoma različito kombinovati u zavisnosti od potreba i dobijanja određene informacije. Može se misliti da su Accelerometa i Girometar međusobno isključivi ali to nije slučaj. Kao primjer se može dati gimastičar koji mijenja uglove svoga tijela dok se kreće, a posebno kada se nalazi u vazduhu promjena vektora je dosta značajna za pravilnim određivanjem njegovog tijela i interpretacije rezultata.
U nekoliko sljedećih primjera će biti prikazani i ukratko objašnjeni neki projekti i primjene.
Rukavica sa mjerenjem pritiska i položaja
Slika 1.7 Rukavica sa senzorima pritiska.
Rukavica u sebi ima ugrađene senzore za mjerenje pritiska i položaja. Na slici 1.7 je prikazan njen dizajn, senzorske trake, interpretaciju podatka grafički na mjeraču pritiska, i na portabilnom uređaju. Ova rukavica ima niz primjena a neke od njih su:U sprotskoj medicini da se utvrdi da li igrač hvata loptu vrhovima prstiju ili dlanovima, koliki je pritisak lopte u trenutku hvatanja iste, koje su pozicije i kako igrač drži loptu, kod gimnastičara kako se hvataju i drže za rekvizite i da li pravilno opredeljuju opterećenje itd.U rehabilitacionoj medicini da se odredi položaj prstiju i maksimalno opterećenje koje se može izdržati na prstima dlanovima i zglobu, da se odredi maksimalno kretanje zglobova šake itd.
Monitoring skočnog zgloba Uređaj (sl. 1.8) posjeduje girometar i accelerometar i određuje maksimalni ugao g odnosu na Ay osu pri kretanju na skočnom zglobu.
U sportskoj medicini može pokazati da li je određeni stav pravilan ili ne i ukazati na razloge problema i rješenje.
U rehabilitacionoj medicini daje napredak oporavka skočnog zgloba i njegovu pripremljenost za opterećenje. U odnosu na ovu informaciju može se odlučivati da li je potreban poseban
7

Bežični monitoring kretanja i biosignala
tretman. Slika 1.8 Senzor ugla
Kretanje tijela
Na tijelo se postavlja mnoštvo senzora koji posjeduju giroskop i accelerometar (sl. 1.9), tako da u svakom trenutku senzori znaju svoj položaj u prostoru tokom vremena. Interpretacijom informacije sa senzora moguće je kreirati model u realnom vremenu, i snimati kretanje. Svaka tačka na slici predstavlja jedan senzor i od količine senzora zavisi rezolucija kretanja u toku vremena.
U sportskoj medicini se može ispratiti svaki položaj, stav, vrijeme reagovanja način na koji se reagovalo.
U rehabilitacionoj medicini mogu se veoma lako utvrditi odstupanja od normalnog stanja i uticati na korekciju tih istih odstupanja. Slika 1.9 Kretanje tijela sa mrežom senzora
Iz datih primjera veoma je lako zaključiti da se različitim kombinacijama ovih senzora može pouzdano brzo i efikasno dobiti željena informacija o motorici određenog dijela tijela čovjeka. Primjene mogu biti različite, nevažno da li želimo da utičemo na postojeće stanje ili da korigujemo isto.
Elektromijografija (EMG) je tehnika za posmatranje i snimanje električne aktivnosti koju proizvode mišići skeleta. EMG detektuje električni potencijal generisan mišićnim ćelijama kada se aktiviviraju nervno ili električno. Uobičajeno je da se EMG radi u paru sa nekim drugim testom koji mjeri provodnost nerava. EMG uspješno ukazuje na niz problema i pomaže u njihovom rešavanju. Šta sve EMG može da ponudi dato je sledećom listom:
Pronalazi normalne i abnormalne nerve, mišiće, motorne i senzorne neurone. Lokalizuje regione normalnih i abnormalnih funkcija. Definiše tip abnormalne funkcije Definiše veličinu abnormaliteta. Definiše prostiranje i progresiju abnormaliteta. Može da okvirno ukaže kada se desila nervna ili mišićna povreda. Može da predvidi trajanje povrede ili oboljenja. Opisuje progresiju ili oporavljanje od abnormaliteta. Pomaže u dijagnozi i prognozi bolesti vezane za mižiće, nerve i neurone. Pomaže u odabiru odgovarajućeg tretmana. Pomaže u praćenju kako pacijentu odgovara tretman koji mu se pruža tako što prikazuje promene
u neuro-muskularnim funkcijama. Precizno pronalazi lokacije mišićnih povreda ili abnormalnosti koje su potrebne pri
intramuskularnim tretmanima.
8

Bežični monitoring kretanja i biosignala
Primjenom u sportskoj medicini, prati razvoj mišića i ukazuje na potrebne vježbe za pravilno razvijanje istog.
Fizičke karakteristike EMG-a:
Potencijal mišićne membrane je oko 90 mV, što predstavlja i električni izvor koji se se distribuira na mišiću usled rada i kasnije prati.
Izmjereni EMG se kreće u okvirima od 50 uV do 30 mV u zavsnosti od mišića koji se prati. Tipično vrijeme ponavljanja rada mišića zavisi od njegove veličine i funkcije, i iznosi od 7Hz do
20 Hz.
Postoje dvije vrste EMG-a i to su:
Intramuskularni EMG (sl. 1.10), izvodi se tako što igla koja sadrži dvije tanke elektrode probije kožu i uđe u mišić. Za vrijeme probijanja igle se prati električna aktivnost i ona se zove "ubodna aktivnost". Sama "ubodna aktivnost" je veoma važna i daje informacije o stanju mišića i njegovim nervima, jer normalni mišići dok miruju daju signale određenog obilka i tipa kada igla uđe u njih. Kada se igla ubaci počinje da se posmatra električni signal mišića dok miruje. Ako se pojave spontane abnormalne aktivnosti one mogu ukazati na oštećenja mišića i nerava. Poslije praćenja u stanju mirovanja, pacijent se zamoli da polako zateže i opušta mišić. Oblik veličina i frekvencija rezultata je ono što je važno u ovakvom posmatranju. Poslije određenog vremena igla se povuče za par milimetara i posmatranje se ponavlja od početka. Pošto je ovakav EMG ekstremno lokalizovan i daje sliku unutar određenog dijela mišića, tada se moraju vršiti višestruka ubadanja i mjerenja dok se ne dobije dovoljan broj signala potrebnih za dijagnozu. Zbog raznolikosti u obliku, konstrukciji, veličini i starosti mišića elektrode se kod različitih pacijenata moraju stavljati na različite lokacije da bi se dobila pravilna očitavanja. Ovakav EMG očitava stanje mišića na nivou nekoliko mišićnih vlakana i kao takav je ekstremno precizna procedura za lokalizaciju i sanaciju različitih vrsta abnormaliteta.
Slika 1.10 Intramuskularna elektromijografija
9

Bežični monitoring kretanja i biosignala
Zbog svoje lokalizacije ovakav EMG se koristi najčešće u rehabilitacionj medicini a ekstremno rijetko u sportskoj medicini jer on perfektno obavlja funkcije lokalizacije, predviđanja i progresiju abnormaliteta i pomaže pri sanaciji istog.
Površinski EMG (sl. 1.11) je neinvazivna metoda za praćenje električne aktivnosti mišića koja se obavlja pomoću elektroda postavljenih na površini mišića koji se posmatra. Ovakav EMG snima električnu aktivnost mišića koji obuhvata velike površine i kao takav daje generalnu sliku za razliku od intramuskularnog EMG-a. Metoda prati signale poeriodičnosti od 20 Hz do 500Hz, ima znatno lošiju rezoluciju i podložna je greškama usled kretanja površine mišića. Elektrode su najčešće 10 mm u prečniku i one su obične provodne površine koje zahtijevaju da otpor kože bude mali. Mogu biti i aktivne što znači da su opremljene nekom elektronikom koja smanjuje zahtjevnost provodnosti kože i povećava SNR odnos i filtrira signal (sl.1.12). Ova metoda snima kako voljnu tako i nevoljnu aktivnost mišića. To dovodi do toga da je moguće snimati i stimulisane aktivnosti mišića preko intramuskularnih elektroda ili površinskih električnih stimulacija. Kombinacija intramuskularnog i površinskog EMG-a zajedno sa stimulacijama mišića najčešće se koristi kod otkrivanja razloga mišićnih paraliza bilo kakvog oblika.
Slika 1.11 Površinski EMG djelova tijela Slika 1.12 Prelazak na aktivne elektrode
Upotreba površinskog EMG-a najčešće se ograničava na generalno praćenje progresije u razvoju mišića. Na slici 1.11 Vide se tri različita modela monitoringa: prvi segment je monitoring razvoja mišića torzoa i koji mišići i njihov redosled djeluju u izvršavanju neke aktivnosti, na drugom segmentu slike prati se razvoj i aktivnosti mišića noge, a u trećem se prate mišići podlaktice. Ovakavim pristupom se daje generalna slika o mišiću kao cjelini, njegovoj upotrebi, veličini, snazi, periodičnosti korišćenja i zdravlju.
Upotreba površinskog EMG-a je toliko česta upotreba u sportskoj medicini da se u narednih par godina planira implementacija unutar sportske opreme bilo kojeg tipa (od rukavica do dreseva i to pri aktivnom bavljenju sporta). Samim praćenjem i prikupljanjem statističkih podataka je moguće predvidjeti progresiju, digresiju, abnormalnosti i povrede što bi trebala da bude ogrmna prednost u održavanju zdravlja i karijere sportiste.
Ovim se završava oblast interesovanja u okviru poznavanja medicinskog aspekta posmatranih biosignala i napominjem da će fokus biti na posmatranju 3. kanalnog EKG i motoriku kretanja tijela. Razlog izbora ova dva segmenta je taj što invazivne metode se ne mogu samostalno raditi bez saradnje i prisustva
10

Bežični monitoring kretanja i biosignala
medicinskog osoblja, a time se eliminiše intermuskularni EMG. EKG i EMG su veoma povezani jer prate iste fizičke fenomene, ali je EKG praćenje vitalnog signala i zato je izabran. Motorika kretanja je izabrana bez ikakve važnosti u odnosu na ostale segmente jer svi oni predstavljaju samo različitu implementaciju istih principa.
2. BlueTooth Primjena
2.1 Motivacija i razvoj bežičnih tehnologija
Želja za komunikacijom i fizičkom mobilnošću, upravljačkih i kontrolerskih uređaja, dovela je do razvoja novih bežičnih sistema u cilju automatizacije. Sama informacija koja je najčešće prenešena u takvim okruženjima je tip “informacije o trenutnom i prošlom stanju”. U okviru normalnog rada ovakav način komunikacije se bazira u formi ponavljajućih nizova malih paketa velike gustine. Značaj tih paketa se striktno povezuje za dinamiku informacije koja se želi prenijeti, i kao takva može imati i striktan vremenski interval, koji je sam po sebi važan za pravovremenu obradu informacije. Informacija se možda prikuplja u veoma hazardnim okolinama kao što su: ekstremne temperature, visoka vlažnost, prisustvo hemikalija koje štete opremi, radioaktivno zračenje ili konstantnog prisustva elektromagnetnog šuma, a možda je i samo prisustvo ovakve pojave u okolini uređaja, informacija sama po sebi. Generalno količina protoka koja je ostvariva preko ovakvih sistema je relativno nezahtjevna, dok je sama pouzdanost sistema za prenos informacije veoma zahtjevna, kao i njihovo vremensko obilježavanje.U ciljanom okruženju sa visokim stepenom važnosti, bežični način prenosa informacije, generalno komunikacije, osim što ima manju zahtjevnost održavanja, imaju i manju cijenu integracije, sam princip na kojem se bazira, omogućava jednostavno segmentno unapređivanje opreme prema potrebi, i prilagođavanja okruženju u kojima sistem funkcioniše.
Kao jedan od predstavnika bežičnih sistema komunikacije uzima se BlueTooth sistem. Prvobitna namena BlueTooth uređaja je bila orijentisana na komunikaciju između računarske opreme, mobilnih telefona i perifernih uređaja, mada se brzo uvidjela njegova koristnost i u drugim oblastima gdje je potreba za sigurnom i relativno brzom komunikacijom ili signalizacijom bila potrebna. Danas generalna upotreba je vezana za :
Prenos podataka, glasa, komunikacija itd. 1-na-1 (AD-HOC) Zamjenu žične fiksirane infrastrukture.
Kako je orginalna uloga BlueTooth bila orijentisana u tom smjeru, tako je u toku razvoja ovoga sistema došlo do optimizacije ovih specifičnih segmenata. Jedna od takođe veoma važnih osobina ovih uređaja je mala potrošnja energije jer su ti uređaji relativno kratkog dometa.
Generalno možemo zaokružiti osobine ovog sistema na:
Pouzdanost Transparentni paketi informacija Mogućnost vremenskog obilježavanja (Time Stamping)
11

Bežični monitoring kretanja i biosignala
Niska potrošnja energije Izrada za specifične uslove rada
Izvođenjem iz navedenih osobina možemo zaključiti da BlueTooth ima veoma važnu ulogu u razvoju bežičnih sistema bilo koje namjene.
2.2 BlueTooth karakteristike
Karakteristike ovakvih baziranih sistema date su u tabeli 2.1
FREKVENCIJSKI OPSEG 2400MHz – 2483,5MHz BROJ NOSILACA 79 (EU & US) RAZMAK IZMEĐU NOSIOCA 1 MHz SNAGA PREDAJE KLASA 1 MAX +20dBm (PA)
KLASA 2 MAX +4dBm (0 dB nom) KLASA 3 MAX +0dBm
DALJINA DOMETA 10 cm – 10 m, MOGUĆE DO 100m MODULACIJA 1Mbps GMSK
2Mbps DQPSK 3Mbps 8 DPSK
MULTIPLEKS NOSIOCA TDMA TDD FHSS 1600 hoops/s TRAJANJE TDD FREJMA 1,25 ms TRAJANJE SLOTA 625μs UKUPNI DATA-RATE 723,2 kbps
1448,5 kbps 2178,1 kbps
AUDIO KODIRANJE 20 GLASOVNIH KANALA Varijabilna Delta modulacija CVSD Impulsna Kodna Modulacija PCM Sub-Band kodek SBC
Tabela 2.1 Karakteristike BlueTooth sistema
2.3 Primjena BlueTooth baziranih uređaja
Primjena BlueTooth može se podijeliti na nekoliko povezanih cjelina: Mobilna obrada informacija (industrijska i korisnička)
o Ručni mobilni terminalio Docking staniceo Periferijalna komunikacija
Medicinski uređajio Instrumentalizacijao Praćenje pacijenatao Lokalnoo Daljinsko
12

Bežični monitoring kretanja i biosignala
Terminali na mjestu prodaje (Point Of Sale POS)o Skeneri/Transakcioni terminalio POS periferije
Unutar ovako određene strukture posebno će se obratiti pažnja na mobilnu obradu informacija odnosno na segmente vezane za medicinske uređaje.
2.4 Mobilna obrada informacija
Kada uzmemo ovu grupu u cjelini i uporedimo njene glavne osobine, nezavisno od primjene kojoj može pripadati, od kontrole automatskog rada nekog medicinskog aparata, notifikacije osoblja usled nekog važnog događaja ili pokretanje nekog autonomnog elektronskog sklopa generalne ili striktne namjene, ovdje se može izvršiti podjela prema razlogu uvođenja i koriste nja BlueTooth uređaja, a ti razlozi su :
Zamena fiksnih, pokretnih, privremenih i komunikacionih kablovskih mreža Bežični senzori i kontrolna logika BlueTooth ACCESS POINT-i Kombinacija BlueTooth i internet tehnologija.
Iz ove liste ponaosob će biti dati primjeri.
Zamena fiksnih, pokretnih, privremenih i komunikacionih kablovskih mreža
o Fiksne kablovske mreže.
Mobilnost, kao glavni razlog uvođenja, može se ogledati u tome da ako postoje monitoring stanice fiksno locirane, koja trebaju da budu aktivne u određenom vremenskom periodu i posmatraju i analiziraju neki vitalni signal, usled regularne ili vanredne realokacije posmatranog objekta. Ovdje u datom slučaju nad pacijentom treba da se potroši vrijeme dok bi se odkačile fiksne kablovske mreže. Cilj je da sama tranzicija se vrši što brže, i da pri izvršenoj tranziciji se ne gubi vrijeme da se pacijent ponovo postavi na monitoring uređaje već da se to radi po automatizmu odnosno kreiranje globalnih PLUG AND PLAY sistema.
o Pokretne kablovske mreže.
Pri korišćenju portabilnih uređaja, čiji je cilj da imaju ogroman stepen minijaturizacije (da su lakši, jednostavniji za upotrebu i sa velikim stepenom korisnosti) uvodi se potreba za eleminisanjem kablovskih mreža koje služe pri analizi i prenosu signala.
o Privremene kablovske mreže
Ako se želi izvršiti pristup i monitoring pacijenta, periodično ili na proizvoljnoj bazi u toku nekog vremenskog perioda, tada se zbog jednostavnosti, brzine i bez potrebe uznemiravanja pacijenta, i gubljenja vremena koje je potrebno da se on priključi na aparate, koriste BlueTooth bazirani uređaji koji su mali, imaju dug vijek trajanja baterije i koji generalno ne smetaju pacijentu u toku svakodnevnih aktivnosti.
13

Bežični monitoring kretanja i biosignala
o Komunikacione kablovske mreže
Mnogi medicinski uređaji današnjice tradicionalno koriste serijske interfejse kao sredstvo za kontrolu, programiranje ili monitoring procesa (RS 232, RS 422, RS 485). Oni su tipično vezani u AD-HOC režimu, gdje sva operacija se bazira na jednom povezanom računaru i jednom uređaju. Alati koji se specifično koriste pri takvoj komunikaciji su vezani za tip uređaja, ovo ih karakterise kao dobar primjer gdje se BlueTooth koristi u AD-HOC režimu.
Bežični senzori i kontrolna logika
Senzori i kontrolne logike mogu biti veoma različiti u zavisnosti od uloge i potrebe. Neki od njih mogu imati visok nivo ugrađene inteligencije, a neki su jednostavni ulazno-izlazni uređaji koji služe kao interfejs za obradu podataka. U zavisnosti od nivoa autonomizacije, čak i kada ne postoji ostvarena BlueTooth veza, kod onih sa ugrađenom visokom inteligencijom, može se izvršavati određena količina operacija. Na ovaj način dolazi do podjele algoritma medicinskog monitoringa na dvije kritične tačke: monitoring i analiza kritičnog procesa koji se vrši na mjestu gdje se i nalazi senzor i upravljačka bežična kontrolna logika koja postavlja i prati parametre biosignala određenog procesa. Kao poslijedica toga odluka, detekcija i notifikacija o biosignalu definisanom određenim parametrima, bilo da parametri predstavljaju loš ili dobar biosignal, vrši se na mjestu senzora i kontrolne logike, a parametri kontrolne logike i primanje informacije o detekciji biosignala se unose i prikazuju na udaljenom mjestu za monitoring. Ovim, ako ne postoji komunikacija sa udaljenim monitoring sistemom, senzor i kontrolna logika će da izvršavaju zadatu operaciju sa već postojećim parametrima biosignala koji su im zadati dok se oni ne izmijene ili im ne bude zadata druga operacija.
BlueTooth ACCESS POINT-i
U sistemu koji posjeduje veliku količinu ostvarenih komunikacija preko BlueTooth-a pojavljuje se potreba za formiranjem centralnog komunikacionog sistema, koji treba da obezbijedi pravilan i siguran način komunikacije, postigne zavidan nivo centralizacije i monitoring svih uređaja. Time se stvara potreba za postavljanjem BlueTooth ACCESS POINT-a kojima je ovo i generalna namjena.
Kombinacija BlueTooth i internet tehnologija
Time što je BlueTooth sistem optimizovan za rad sa web tehnologijama, to ga čini odličnim kandidatom za integraciju monitoring sistema sa web tehnologijama. Na ovaj način se kontrola i monitoring mogu decentralizovati i dozvoliti pristup na izvršnom hostu svim autorizovanim korisnicima. Pri tome treba napomenuti da translacija sa web tehnologija na željene protokole se vrši po automatizmu (jednostavnost).
14

Bežični monitoring kretanja i biosignala
2.5 Prednosti i mane BlueTooth baziranih uređaja
BlueTooth kao komunikacioni sistem je uveo novi način razmišljanja i realizacije unutar monitoring sistema, postigao je visoku primjenu gdje se traži brzina, pouzdanost, i određeni nivo autonomizacije procesa ali kao takav mogao je imati kompromise koji su stvorili određene prednosti i mane.
PREDNOSTI:
Brzina koju postiže je dovoljna za svoju primjenu a kreće se maksimalno od 1 Mbps do 3 Mbps. Eliminiše kablove i omogućava mobilnost uređaja ili operatera. Koristi kratke poruke za komunikaciju, što je i sasvim dovoljno pošto su skoro sve komandne
poruke bazirane na ON/OFF principu, a poslata i primljena informacija je najčešće broj. Ima fiksno određeno i predefinisano vrijeme poruke što ga čini idealnim za slanje podataka u
realnom vremenu. Ima kratak domet do 100m maksimalno, što ga čini i više nego idealnim u mnogim slučajevima, a
najčesće je daljina potrebna za komunikaciju manja od 1m. Generalno nije kreiran za globalnu mrežu, ali nije problem da je ostvari, čak i kada su server i
klijent mobilni on zadržava komunikaciju 1 – na – 1. Cijena integracije i instalacije je mala u odnosu na mobilnost i kvalitet usluga.
MANE:
Nekontrolisane promjene količine protoka podataka, što generalno ne utiče na kvalitet prenosa poslate informacije.
Potrošnja energije pri samostalnom baterijskom radu povećava vremenski interval “tišine” pri komunikaciji, najčešce kod senzorskih instrumenata koji imaju samostalno baterijsko napajanje. Vremenski interval između periodične uzastopne komunikacije se povećava u cilju povećanja životnog ciklusa bateriskog napajanja.
Sam uređaj ne može da radi u velikom temperaturnom opsegu. BlueTooth može da ima problema sa radom ako nije uspostavljena direktna vizuelna vidljivost
između komunikacionih BlueTooth modula. Uticaj drugih bežičnih mreža na njegov rad, (kao 802.11a/b/g/n standarda, iz razloga što su im
iste radne frekvencije). Iz toga slijedi da, 17 kanala za rad je ugroženo direktnim prisustvom neke od tih mreža, što može značajno smanjiti efikasnost i pouzdanost, a u najmanju ruku brzinu prenosa informacija.
15

Bežični monitoring kretanja i biosignala
3. BlueTooth – specifikacija i profili
BlueTooth je ime dato tehnologiji koja koristi radio talase kratkog dometa, sa svrhom da zamijeni kablove koji povezuju mobilne ili fiksne elektronske uređaje, bilo koje vrste, tipa ili namjene. Namjera pri stvaranju ovakvog modela komunikacije je da ih poveže jednim univerzalnim radio linkom, čije su glavne osobine: kvalitet, jednostavnost pri kreiranju i pristupu takvim uređajima, niska potrošnja energije i mala cijena integracije. Pošto radi u veoma zauzetom frekvencijskom okruženju, on koristi brz način identifikacije, uspostavljanja komunikacije i prenosa, automatsko i brzo frekvencijsko preskakanje na novu radnu učestanost, što i čini ovaj sistem sam po sebi kvalitetnim i efikasnim. Pošto BlueTooth radio link radi na slobodnom band-u na 2.4GHz i da bi izbjegao uticaj ostalih uređaja, koji rade na istom band-u, on mijenja radnu frekvenciju instantno po prijemu ili predaji komunikacionog paketa. U poređenju sa bilo kojim ostalim sistemom bežičnog prenosa, BlueTooth radio preskače brže i koristi kraće pakete pri komunikaciji. U nastavku je prikazana kratka specifikacija samog sistema i njegovi profili.
SPECIFIKACIJA opisuje kako BlueTooth tehnologija radi. PROFILI opisuju način primjene tehnologije prema specifikaciji
za konkretnu upotrebu orijentisanu prema potrebi.
3.1 Specifikacija BlueTooth protokolnih nivoa
16

Bežični monitoring kretanja i biosignala
Slika 3.1 Dizajn BlueTooth profila prema specifikaciji
Na slici 3.1 je grafički prikazana arhitektura BlueTooth protokolnih nivoa, kojih se mora pridržavati pri kreiranju uređaja koji želi da iskoristi prednosti ove arhitekture. Sa tabelom 3.1 su opisani glavni elementi ove arhitekture.
BlueTooth RADIO Radio nivo definiše zahtjeve koji moraju biti ispunjeni u BlueTooth primopredajniku koji radi na 2.4GHz ISM opsegu.
Frekvencijski opseg Nivo Frekvencijskog opsega određuje osobine BlueTooth Link Controller-a (LC), koji izvršava sve frekvencijske potokole i druge rutine nižeg prioiteta pri komunikaciji bilo koje vrste.
LMP (Link Manager Protocol) Konekcijski Menadžer Protokola (Link Manager Protocol) je kontrolisan od strane Link Menadžera sa strane prijemnika i predajnika, da postavi, održava i kontroliše vezu između minimum dva, maksimalno osam BlueTooth uređaja
HCI (Host Controller Interface) Host Controller Interface obezbjeđuje upravljački pristup kontroli: Frekvencijskih opsega i Link Menadžera, daje pristup očitavanjima hardverskog stanja i upravljačkim registrima.
L2CAP (Logical Link Control and Adaptation Protocol)
Logical Link Control and Adaptation Protocol obezbjeđuje viši nivo multipleksiranja protokola, segmentaciju paketa,
17

Bežični monitoring kretanja i biosignala
njihovo ponovno spajanje i prosljeđivanje, i ocjenjivanje kvaliteta prenosa o mogućim informacionim servisima.
RFCOMM RFCOMM protokol obezbjeđuje emulaciju serijskog porta peko L2CAP protokola. Ovaj protokol je baziran na ETSI standardu TS 07.10.
SDP (Service Discovery Protocol) Servis pronalaženja mogućih potokola obezbjeđuje sredstvo i način za aplikaciju da pronađe koji mogući servisi su dostupni preko postojećih BlueTooth uređaja. Takođe dozvoljava aplikaciji da odredi karakteristike tih trenutno mogućih servisa i njihov pristup.
Tabela 3.1 Glavni elementi BlueTooth arhitekture
Svaki od ovih nivoa protokola ima interne uslovne karakteristike, koje moraju biti zadovoljene, ali njihovo predstavljanje i osobine su važne proizvođačima samih BlueTooth modula, ili ako se želi koristiti neki BlueTooth modul koji prevazilazi nominalne granice date ovim specifikacijama i imaju neka odstupanja u upravljačkom ili komunikacionom segmentu.
Kombinovanjem i manipulacijom ovih nivoa, njihovom internom komunikacijom, promjenom parametara i osobina, postižu se uslovi koji omogućavaju zamjenu mnogih žičanih komunikacionih infrastruktura. Pri tome se mora obratiti posebna pažnja, da se sa integracijom BlueTooth sistema ne pojave nove promjenljive koje unose neželjene efekte u već postojeći sistem.
BlueTooth je do sada našao najviše primjene u zamjeni komunikacionih fiksnih veza kratkog dometa sa predefinisanim profilima, i kao takav on je povoljna i željena optimizacija postojećih sistema za koje je i predviđen, a praktični uslov budućih sistema.
3.2 BlueTooth profili
Profili su razvijeni sa razlogom kako bi implementacija za postojeće radne modele bila moguća. Postojeći radni korisnički modeli imaju razne predefinisane profile i u zavisnosti od potrebe bira se povoljni profil. Profil se može opisati kao vertikalni prelaz preko raznih nivoa protokola koji su potrebni da bi se izvršile određene operacije koje su vezane za sami profil. U okviru profila ulaze osnovni parametri za nivoe protokola. Profili su izvedeni iz potrebe nadogradnje postojećih sistema bežičnim modelom komunikacije, bez potrebe velike adaptacije i zadržavanjem postojećih kompatibilnosti. Navodeći sve ove osobine i razloge, uvođenje profila je dovelo do:
Broj potrebnih parametara za implementaciju je smanjen, što dovodi da različite primjene i dijele iste resurse.
Parametri su već predefinisani tako da aplikacije rade na sličan način. Uvedeni su mehanizmi za kombinaciju različitih standarda. Upravljački segment je standardizovan dajući univerzalnu arhitekturu kontrole i pristupa
nezavisno od uređaja.
18

Bežični monitoring kretanja i biosignala
Slika 3.2 Profili BlueTooth standarda
Na slici 3.2 se nalaze svi profili koje trenutno podržava BlueTooth standard, neki od njih su više a neki manje iskoriste ni. Većina njih pripada nekom takođe predefinisanom profilu što kaže da je struktura komunikacije BlueTooth uređaja OBJEKTNA i već predefinisana standardima ali to ne ograničava razvoj i instantnu implementaciju nekog novog profila. Kao jedni od važnijih profila detaljnije će se prikazati generički pristupni profil, otkrivanje mogućih pristupa/profila i profil serijskog porta.
3.3 Generički pristupni profil (Generic Access Profile)
Ovaj profil definiše osnovnu urođenu proceduru, povezanu sa pronalaskom BlueToth uređaja, konfigurisanjem parametara linka i njihovim povezivanjem. Takođe definiše procedure koje su povezane sa različitim nivoima sigurnosti pri komunikaciji. Uopšteno ovaj profil opisuje kako se niži nivoi LMP i Frekvencijski Opseg koriste zajedno sa nekim većim nivoima.
3.3.1 Pregled profila
Pregled profila dat je u tabeli 3.2.
Slaganje profila Kao što se vidi na slici 3.2 GENERICKI PRISTUPNI PROFIL obuhvata sve postojeće profile omogućava njihovu konfiguaciju, komunikaciju, raslojavanje i optimizaciju ka željenom izabranom
19

Bežični monitoring kretanja i biosignala
profilu. On ih međusobno sve povezuje.
KonfiguracijaPri komunikaciji generički profil je ono što se razmjenjuje između dva ili više komunikacionih uređaja, i to definiše parametre profila koji će se koristiti.
Korisnički zahtjevU principu BlueTooth komunikaciju je moguće uspostaviti čak i ako ti uređaji međusobno ne dijele isti profil, i ne obezbeđuju međusobnu uslugu i time nema razmjene nikakvih informacija.
Glavne osobine
Postavljanje zahtijeva za imenom, vrijednostima, načinom kodiranja, prosljeđivanjem parametara na korisničkom nivou.
Definiše načine rada koji nijesu vezani za uslugu ili profil već su opšte namjene za sve usluge i profile.
Definisanje generalnih procedura koje mogu biti koriste ne za otkrivanje identiteta, imena i osnovnih mogućnosti usluga ostalih BlueTooth uređaja koji su režimu rada kada mogu biti otkriveni.
Stvaranje i omougućavanje sigurnih veza između uređaja.
Opisivanje generalne procedure koje mogu biti iskoriste ne za uspostavljanje veze sa drugim BlueTooth uređajima.
KonformnostBlueTooth uređaj koji ne prihvata niti dijeli zadati pofil sa ostalim uređajima u svojoj okolini, bi trebao imati ovaj profil radi koegzistencije međusobnog nesmetanog rada.
Tabela 3.2 Osobine Generičkog pristupnog profila
3.3.2 Korisnički aspekt
Sa stanovišta korisnika, što se može znati pri kreiranju komunikacije je definisano opštim parametima:
ADRESA UREĐAJA (BD_ADDR)To je unikatna adresa, BlueTooth uređaja, definisana je kao 48 bitna adresa ili 12 heksadećimalnih karaktera, i ona se ne može mijenjati.
IME UREĐAJA (IME UREĐAJA)To je zadato ime uređaju, iz razloga lakše reprezentacije, ono prestavlja string dužine od 40 do 248 karaktera.
KLJUČ (PIN BROJ).Ključ se koristi da se uspostavi sigurna linija između dva uređaja koja nijesu predhodno komunicirali, i da se uspostavi buduća komunikacija bez zahtjeva ključa. Ključ može biti sačuvan u memoriji uređaja ili se može unijeti na korisničkom nivou.
KLASA UREĐAJA (PRUZANJE USLUGA)
20

Bežični monitoring kretanja i biosignala
U procesu indentifikacije uređaja, klasa uređaja može odrediti koje usluge i profile može obezbijediti taj uređaj.
3.3.3 Način rada
U ovom profilu zavisno od funkcije postoje različiti načini otkrivanja i traženja uređaja.
1. OTKRIVANJE UREĐAJA
Skriveni režim Uređaj se neće odazvati ako se pretražuje, samo će se odazvati ako postoji već
uspostavljena sigurnosna veza, i ako se on eksplcitno traži po imenu i adresi.
Ograničeni javni režim Uređaj može biti otkriven samo u određenim uslovima koji mogu biti pokrenuti nekim
već predefinisanim parametrom.
Javni režim Uređaj se može otkriti u svakom trenutku od strane bilo kog drugog uređaja.
2. POVEZIVANJE UREĐAJA
Nedozvoljeno povezivanje Uređaj neće izvršti povezivanje
Dozvoljeno povezivanje Uređaj će periodično tražiti povezivanje i dozvoljavati ga.
3. UPARIVANJE
DOZVOLI UPARIVANJE Dozvoljava čuvanje veze ako je potvrđena.
NE DOZVOLJAVAJ UPARIVANJE Ne dozvoljava čuvanje veze odnosno uparivanje.
3.4 Otkrivanje mogućih profila/usluga
(Service Discovery Application Profile)Ovaj profil definiše sve moguće procedure da aplikacija koja koristi BlueTooth uređaj, može otkriti sve usluge koje drugi BlueTooth osposobljeni uređaj može pružiti, takođe da preuzme sve predefinisane parametre potrebne za koriste nje tih mogućih usluga. Glavni značaj ovog profila je da definiše procedure i protokole koji opisuju režim rada BlueTooth osposobljenog uređaja.
3.4.1 Pregled profila UOPŠTENO
21

Bežični monitoring kretanja i biosignala
Glavna uloga je da opiše način rada nižih BlueTooth nivoa komunikacionog karaktera, opiše nivo sigurnosti i način pristupa višim nivoima kao : L2CAP, RFCOMM i OBEX.
KONFIGURACIJA
Lokalni uređaj (LocDev):LocDev je segmenat koji pokreće pronalazak mogućih usluga i kao takav mora imati opis svoje arhitekture klijenta, on pokreće pronalazak usluga i prikazuje rezultate tog pronalaska.
Uslužni Uređaj(RemDev): RemDev je bilo koji uređaj koji učestvuje u otkrivanju usluga tako što odgovori na pretragu koja je inicirana od strane LocDev. RemDev ima svoj sopstveni opis profila, nivo zaštite i moguće korisnike koji mogu da koriste njegove usluge u zavisnosti od toga on odgovara na pretragu usluga ili je ignoriše. Bilo koji od ova dva moguća statusa nije ekskluzivnog karaktera. Razlog tome je da istovremeno isti fizički uređaj može biti i LocDev za određenu uslugu i RemDev za drugu uslugu. Samim time se postiže velika dinamičnost pri radu sa BlueTooth uređajima.
KORISNIČKI ZAHTJEVI I MOGUĆI SLUČAJEVIMogući scenariji koji se mogu pojaviti pri radu sa ovim profilom su:
1. Pretraga za uslugom po predefinisanoj klasi same usluge.2. Pretraga za uslugom po atributima same usluge3. Pretraga mogućih usluga.
Prva dva slučaja prikazuju pretragu za poznatim mogućim uslugama koje opisuju neki već predefinisani profil, dok zadnji slučaj opisuje izlistavanje svih mogućih usluga koje jedan BlueTooth osposobljeni uređaj može da pruži, ne vezano sa sopstvenim opisom koju uslugu on može da podržava. Sama zamisao BlueTooth uređaja je definisana tako da ako postoji uređaj za određenu uslugu, i ako je opisana profilom koji sadrži opis te usluge, tada drugi uređaj koji ne zahtijeva tu specifičnu uslugu, može da traži šta taj BlueTooth uređaj može da pruž i da zahtijeva da mu se prikažu sve moguće usluge koje možda i nijesu opisane ovim profilom.
3.5 Profil serijskog porta
(Serial Port Profile)
Ovaj profil je jedan od glavnih razloga stvaranja i koriste nja BlueTooth osposobljenih uređaja. Kao takav je veoma važan za upotrebu u industrijskoj i medicinskoj elektronici jer omogućava niz prednosti a uz to ne remeti postojeću arhitekturu uređaja.Profil se bazira na emulaciji i stvaranju virtuelnog serijskog fizičkog linka koristeći RFCOMM nivo između dva uparena BlueTooth uređaja. Ovakav zahtjev je predefinisan uslugom same primjene uređaja tako što se obezbijede parametri i komunikacija između uređaja, dok se dalje obraćanje prema BlueTooth uređaju vrši kao prema serijskom portu. Na taj način se stvara kompletna interoperabilnost bez modifikacija postojećih sistema. Ovako definisana emulacija serijskog porta preko BlueTooth uređaja je u suštini zamjena fizičkog kabla preko virtuelnog serijskog porta, koji sam po sebi zavisi od operativnog sistema nad kojim postoji mikrokontroler ili računar.
22

Bežični monitoring kretanja i biosignala
3.5.1 Pregled profila
NIVOI PROTOKOLA
Emulacija porta je segmenat koji omugućava način pristupa aplikacije tom virtuelnom portu, sama emulacija je stvaranje virtuelnog porta i način na kojem se njemu pristupa. Način pristupa, komunikacije, sinhronizacije i bilo koja druga regularna operacija nad realnim fizičkim portom, je ista na nivou aplikacije, takođe sama aplikacija nije “svesna” da pristupa portu kao takvom. Iz ovoga slijedi da aplikacija ne pristupa podešavanjima BlueTooth profila i nivoa usluga, već da ona pristupa portu kao obraćanje fizički postojećoj komponenti. U ovakvom slučaju mora postojati neka dodatna aplikacija ili nivo aplikacije, na obe strane, koja će da predefiniše BlueTooth uređaj i koja je “svesna” stanja i usluge samog uređaja, i da obezbjedi nivo pristupa korisničkom zahtjevu.
ULOGE/KONFIGURACIJA
Postojeće uloge definisane ovim profilom su:
Uređaj A (DevA) je onaj uređaj koji pokreće inicijaciju da se oformi komunikacija ka nekom drugom uređaju.
Uređaj B (DevB) je onaj uređaj koji čeka da bude kontaktiran od strane nekog drugog uređaja, da ostvari konekciju sa njim.
U ovakvom rasporedu, komunikacija se ne mora odvijati jednostrano, već je ovo model načina pristupa isti BlueTooth osposobljeni uređaj može imati oba režima rada za nesmetanu dvostranu komunikaciju.
SLUČAJEVI
Pri komunikaciji, pristup emuliranom portu je, kao i fizičkom, ograničen njegovim karakteristikama i kontrolnom signalizacijom, brzinom prenosa i logičkom upravljanju. Nemoguće je istovremeno komuniciranje sa više uređaja preko istog virtuelnog porta, što ne znači da je i nemoguće istovremeno komunicirati sa više uređaja preko različitih virtuelnih portova, i zamjena režima DevA i DevB u zavisnosti od potrebe i uloge.
Osobine profila
Da bi ovaj profil bio moguć, korišćenje sigurnosnih parametara, kao što je autorizacija i identifikacija pristupnih uređaja je opcionalna, dok je postojanje mogućnosti sigurnosnog parametra uslovno. Da li će se koristiti ili ne stvar je početne konfiguracije koriste nja parametara između uređaja. Ako je sigurnost konfigurisana da se koristi kao jedan od parametara, ova dva uređaja se uparuju u toku uspostavljanja konekcije (ako i samo ako je autorizacija i registracija korisnika pravilna). Uparivanje se ne vrši ako je izvršeno ranije, iz razloga što BlueTooth uređaj u uobičajenom režimu rada pamti predhodno uparene uređaje, osim ako nije definisano drugačije.
Mogućnosti pri povezivanju i ostvarivanju komunikacije su :
Ostvarivanje striktne sigurne komunikacije bez autorizacije (Bonding) se eksplicitno ne mora koristiti u ovom profilu i ono je opcionalno.
Uspostavljanje veze je pokrenuto od strane DevA. Otkrivanje mogućih profila/usluga se mora predhodno ostvariti prije nego što se može emulirati komunikacija preko serijskog porta.
Ne postoji fiksirana uloga gospodar-rob (MASTER-SLAVE)
23

Bežični monitoring kretanja i biosignala
RFCOMM nivo se koristi da se prenesu podaci, modemski kontrolni signali i konfiguracione poruke.
KONFORMNOST
Kada govorimo o konformnosti, sve osobine ovoga profila koje su uslovne se moraju ispoštovati u samom procesu proizvodnje nekog BlueTooth modula koji podržava ovaj profil za generalnu namjenu. Ovo se takođe odnosi i na sve opcionalne i uslovne karakteristike za koje je naglašeno da moraju postojati u okviru ovog profila nezavisno od proizvođača. Poslijedica naglašavanja garantovanih i opcionalnih mogućnosti je u tome da nezavisno od proizvođača distributera i korisnika, sama primjena se orijentiše ka sposobnostima BlueTooth uređaja da ispuni garantovane i opcionalne mogućnosti unutar ovoga profila opisane sertifikatom proizvođaca koji mora postojati. Kao takve one se kontrolisu od strane BlueTooth sertifikacionog programa, a sama potreba za određenim opcionalnim karakteristikama modula zavisi od potreba primjene.
APLIKACIONI NIVO
Na ovom nivou se mora znati da je ovaj profil nadograđen na Generičkom Pristupnom Profilu, pa iz toga slijedi da:
Strana A je DevA a strana be je DevB
Sve uslovne osobine Generičkog pristupnog profila su uslovne i u ovom profilu
Ako nije posebno naglašeno sve opcionalne komponente su takođe i opcionalne u ovom profilu
Dakle, parametri iz profila veće važnosti se prosleđuju ka profilima niže klase. Takođe se mora naglasiti da svaki profil koji ima veći status važnosti može proslijediti parametre profilu nižeg satusa, ako i samo ako uslov za postojanje profila nižeg statusa zahtijeva postojanje nekog od profila većeg statusa.
3.5.2 Pregled procedura pri komunikaciji
Procedura se mora ispoštovati pri uspostavljanju i emulaciji serijskog porta. Koraci procedure su:
Uspostavljanje veze i virtuelnog serijskog porta:
o Slanje zahtjeva koristeći otkrivanje mogućih procedura/usluga da se pronađe RFCOMM usluga na određenom kanalu drugog BlueTooth uređaja. Ovo može uključiti mogućnost traženja i biranje između više emulirnih portova koji postoje na drugom BlueTooth uređaju. Ako je poznato tačno koji servis da se pozove, koristi se pretraga pomoću klase usluge.
o Opcionalno da se izvrši autorizacija pristupa, takođe opcionalno da se uključi zaštita podataka.o Zahtjev novog L2CAP kanala za komunikaciju sa RFCOMM drugog BlueTooth uređaja.o Uspostavljanje komunikacije preko RFCOMM na L2CAP kanalu.o Uspostavljanje virtuelne komunikacione veze za paralelni port preko RFCOMM sesije, koristeći
već predefinisane brojeve kanala.
24

Bežični monitoring kretanja i biosignala
o Virtuelna emulacija serijskog porta je spremna za slanje i primanje podataka sa strane oba uređaja (DevA, DevB)
Ova procedura je uslovna za prihvatanje i uspostavljanje komunikacije i emulacije serijskog porta. Koraci procedure su:
Prihvatanje veze i uspostavljanje virtuelne serijske konekcije:
o Ako je zahtijevano od strane uređaja koji je pretraživao, izvršiti autentikaciju, i po završenoj autentikaciji uključiti zastitu podataka.
o Prihvati novi kanal koji je određen od strane L2CAP.o Prihvati RFCOMM sesiju na tom kanalu. o Uspostavljanje virtuelne komunikacione veze za paralelni port preko RFCOMM sesije, koristeći
već predefinisane brojeve kanala. Ovo može pokrenuti zahtjev za lokalnu autorizaciju uređaja koji želi da komunicira, i da po tome uključi enkripciju podataka.
o Registrovanje da postoji emulacija virtuelnog serijskog porta i da je uključi u svoj profil Otkrivanje mogućih profila/usluga. Ovo implicira da postoji lokalna baza usluga koje taj uređaj može da podrži i da odgovori na zahtjev pretrage i pružanja usluge.
o Sve usluge/aplikacije koje se obavljaju preko RFCOMM nivoa moraju da pruže neki zapis profilu Otkrivanje mogućih profila/usluga koji uključuje parametre potrebne da bi se mogle koristiti sve usluge/aplikacije bazirane na RFCOMM nivou. Iz ovoga slijedi da bi se mogla uspostaviti komunikacija preko virtuelnog serijskog porta, mora se izvršiti predhodna registracija same usluge i njenih parametara.
3.5.3 Režimi pri čuvanju energije i gubitku veze
Uređaji koji učestvuju mogu biti u različitim režimima čuvanja energije. Nije od važnosti da se koristi neki od postojećih režima čuvanja energije, međutim ako se zahtijeva režim rada niske energije, preporučuje se koristiti ako je moguće. Dok postoji komunikacija, ne odobrava se nova, a ako dođe do gubitka veze RFCOMM se gasi i opet inicijalizuje.
3.6 Ostali profili predefinisani BlueTooth specifikacijom
Postoje i mnogi drugi profili koji nijesu toliko od važnosti u ovome radu,i kao takve biće samo pomenuti i ukratko objasniti njihova upotreba u tabeli 3.3.
Pofil bežične telefonijeCTP (Cordless Telephony Profile)
Ovaj profil definiše procedure za koriste nje servisa bežične telefonije. Primjer je model višestrukog izvora komunikacija pomoću BlueTooth uređaja na telefonu, i prisustvo okolnih usluga, mogu se detektovati i koristiti bazne stanice kao izvor komunikacija, uređaji mogu da se podese da u zavisnosti postojanja lokalne bažne stanice on prepoznaje i koristi te veze, a ako ne postoji koristi vezu mobilnog telefona.
25

Bežični monitoring kretanja i biosignala
Profil InterkomaIP (Intercom Profile)
Generalno se definiše i koristi slično kao model “Walkie-Talkie” ali sa BlueTooth sposobnim uređajima.
Profil slusalicaHS (Headset Profile)
Genealno definisan za slušalice koje mogu da opslužuju više različitih uređaja.
Profil modemske vezeDNP (Dialup netwoking Profile)
Profil iskorišćava mogućnost uređaja da emulira vezu ka postojećem fizičkom modemu.
Profil FaksaFP (Fax Profile)
Nadograđuje se na Profil Modemske Veze i emulira koriste nje Fax-a.
Profil mrežnog pristupaLAP (Lan Access Profile)
Komunikaciju i enumeraciju BlueTooth uređaja u cilju proširenja lokalne mreže.
Profil generalne razmjene objekataGOEP (General object exchange)
Ovaj profil služi kao opisna i indentifikaciona podloga za profile: Prosleđivanje objekata, Razmene fajlova i profil sinhronizacije.
Profil proslijeđivanja objekataOPP (Object push Pofile)
Razmjena specifičnih predefinisanih objekata pripadnika neke predefinisane klase specifične strukture.
Profil razmjene fajlovaFTP (File transfer profile)
Služi za eksplicitnu razmjenu podataka bilo koje vrste u obliku fajlova. Pojam fajl se mora prihvatiti kao već postojeći zapis nekog oblika, poznatog formata i određene veličine .
Profil sinhronizacijeSP (Synchronization Profile)
Ovaj profil podrazumijeva da dva različita BlueTooth uređaja razmjenjuju podatke na taj način da zapisani podaci na obje stane budu isti, u cilju globalne informacione centralizacije podataka.
Tabela 3.3 Ostali BlueTooth profili
4. Mikrokontrolerska komponenta primjene BlueTooth
Kada se govori o mikrokontrolerskoj komponenti BlueTooth-a, misli se na osposobljavanje mikrokontrolera da vrši neki vid komunikacije preko BlueTooth uređaja. Informacija koja je prenešena nije od neke važnosti u ovom razmatranju, već je važno da neki određeni mikrokontrolerski uređaj ima mogućnost da vrši prenos informacije. Kako mikrokontroleri postaju manji i jeftiniji, njihov spektar moguće primjene se povećava, tako što se sve veći broj postojećih eksternih komponenti direktno integrišu unutar samog mikrokontrolera. Svaka od mogućnosti koji definiše mikrokontroler određene primjene, omogućava nam da izaberemo neki od postojeće serije i iskoristimo ga za neku striktnu ulogu. Neki od ovih mogućnosti su Analogno/Digitalni Konverter (ADC), Digitalno/Analogni Konverter (DAC), Širinskopojasna modulacija (PWM), pojačavači, tajmeri, brojači, UART, Inteligentni Pristupni Kontroler I2C, i USB. Ovako izmiješana struktura mogućnosti kreira mrežu različitih komunikacija unutar mikrokontrolera i kao takva mešovita struktura bilo je pitanje vremena kada će doći do integracije sigurne
26

Bežični monitoring kretanja i biosignala
bežične komunikacione infrastrukture. Uvođenjem BlueTooth-a u standardni niz mogućnosti jednog mikrokontrolera, dolazi do otvaranja mnogih novih primjena.
Sama hardverska integracija se dijeli na tri nivoa:
Rješenje sa jednim integrissanim kolom, sa ROM ili Flash ROM. Rješenje sa jednim integrisanim kolom sa eksternim Flashom. Rješenje sa više integrisanih kola.
Bavljenje ovom tematikom spada u oblast planiranja, razvoja i proizvodnje integrisanog kola, i kao krajnjem korisniku su jedino važne njegove mogućnosti, dimenzije, način pristupa, konfiguracije i upotrebe u generalnom terminu.
Većina ovih integrisanih kola postoje kao prefabrikovani moduli, koji imaju striktnu upotrebu i definisan niz mogućnosti.
Pošto se ovdje govori o striktnim mikrokontrolerima opšte namjene tada se mora uzeti predpostavka da oni nijesu BlueTooth osposobljeni. Kao uređaji koji nijesu dizajnirani za mogućnost prenosa informacija bežičnim putem, mora postojati način da se oni osposobe za tako nešto koristeći već postojeće vidove komunikacija.
Mogućnosti komunikacije mikrokontrolera se svode na:
GPIO (Ulaz/Izlaz generalne namjene) UART (Univerzalni asinhroni prijemnik/predajnik) USART (Univerzalni sinhroni/asinhroni prijemnik/predajnik) RS232 (Komunikacija preko serijskog porta) USB (Univerzalni serijski BUS) I2C (Inter-IC) SPI (Serijski periferijalni interfejs)
Prateći navedenu listu načina komunikacije mikrokontrolera, izgrađeni su BlueTooth moduli čija se kontrola i prenos informacija vrši preko jednog od ovih standarda.Nezavisno od standarda BlueTooth moduli se dijele na HCI-Postojeće i HCI-Nepostojeće.
4.1 HCI Postojeći - HCI Nepostojeći BlueTooth moduli
Ako se obrati pažnja na oformljenu arhitekturu BlueTooth uređaja i pogleda sa nivoa hardver-skog razvoja, može se zaključiti da svaki protokolni nivo, osim BlueTooth Radio, LMP i Kontrolisanog frekvenciskog opsega, prestavlja niz parametara koje treba ispuniti, uslova konfiguracionih poruka koje treba proslijediti, i to sve u cilju da bi se BlueTooth uređaj osposobio da radi u određenom profilu. Sve ove mogućnosti jednim imenom zovemo HCI (HOST CONTROL INTERFACE) koji predstavlja uniformni interfejs metod za pristup BlueTooth hardverskim sposobnostima. Samom promjenom kontrolnih registara HCI-ja režim rada, profil i mogućnosti BlueTooth modula se mijenjaju. Pošto sposobnosti samog uređaja zavise od HCI, pri primjeni u industriskoj i medicinskoj elektronici, važno je znati razliku između ovakvih uređaja.
27

Bežični monitoring kretanja i biosignala
HCI POSTOJEĆI
Ako se kaže da BlueTooth modul je HCI Postojeći tada se može očekivati:
Ograničen broj mogućih profila (najčešće GAP , SDP , SPP i PAN) Da se konfiguracija najčešće vrši prije integracije u mikrokontrolersko okruženje pomoću
personalnog računara, najčešće nije izmenjiva. Mogući pristup preko više različitih komunikacionih standarda mikrokontrolera. Podrška za sve režime čuvanja energije. Visok nivo sigurnosti. Postojanje lokalnog mikroprocesora koji služi za konfiguraciju, mogući određeni programibilni
portovi generalne I/O namene.
HCI NEPOSTOJEĆI
Ovakav BlueTooth modul nema predefinisan HCI, on se mora realizovati programski i kao takav daje:
Podršku za sve profile BlueTooth uređaja uz mogućnost razvoja novih. Konfiguracija se vrši pomoću programa mikroprocesora, izmenjiva je. Očekivanje mogućeg pristupa preko samo jednog komunikacionog standarda mikrokontrolera. Podršku svih nivoa sigurnosti. Podršku za sve nivoe čuvanja energije. Nepostojanje lokalnog programibilnog mikroprocesora koji održava konfiguraciju.
Ako se želi koristiti neki od predefinisanih profila tada BlueTooth moduli sa Postojecom HCI konfiguracijom su pozeljni, jer zamisao mikrokontrolerske jedinice je u jednostavnosti pouzdanosti i brzini rada.
Ako postoji želja za nekim specifičnim profilom, ili treba razviti novi tada se mora koristiti modul sa nepredefinisanim HCI i on se razvija softwerski.
4.2 Mikrokontrolerski USB BlueTooth modul
Zbog samog dizajna mikrokontrolera, njihove ograničene brzine obrade informacija i striktne upotrebe, do sada nije napravljena masovna direktna standardizovana integracija USB BlueTooth modula na mikrokontrolerske uređaje, i to iz razloga što mikrokontroleri opste namjene najčešće nemaju integrisani HCI USB port već se on emulira na neki od postojećih načina.
Oni mikrokotroleri koji imaju integrisani USB port najčešće ne mogu da postignu realni maksimum iskorištavanja brzine komunikacije na njemu i najčešće takvi USB BlueTooth moduli moraju da imaju integrisani HCI na samom modulu, gdje se prosljeđivanje parametara vrši u nestandardizovanom obliku, u zavisnosti od proizvođača (drajveri niskog nivoa).
28

Bežični monitoring kretanja i biosignala
Jedan od načina zaobilaska ovoga problema, i “mikro-standardizovanja” je u tome da se izvrši iskorišćavanje SPI standarda. Eksternim elektronskim kolima se emulira Fast-USB HCI port, koristi standardni USB BlueTooth uređaj koji ima generička svojstva pristupa i ne sadrzi predefinisan HCI, koji se softwerski emulira sa svim datim parametrima.Najčešće ovakav oblik emulacije je veoma komplikovan. Zahtijeva veoma mnogo procesorskog vremena mikrokontrolera kao i poznavanje samog BlueTooth komunikacionog standarda. Ovo nije cilj pri razvoju nekog mikrokontrolerskog uređaja iz razloga jer se on dizajnira i proizvodi za upotrebu koriste njem sposobnosti mikrokontrolera, iskorišćavajući ih za neku generalnu namenu, a ne razvijanjem novih osobina bežične komunikacije koje mogu biti standardizovane kao veliko vrijeme od dizajna do proizvodnje.Pri ovakvom dizajnu najčešće zadužen za ovu operaciju je dodatni procesor na mikrokontrolerskom uređaju i on samo služi za HCI ulogu. Prednost ovakvog sistema je u tome što nepostojanje predefinisanog HCI na BlueTooth modulu otvara mogućnost: iskorišćavanja svih sposobnosti BlueTooth uređaja, iskorištavanje svih mogućih profila, kreiranje novih bez opterećivanja glavne procesorske jedinice mikrokontrolerske ploče. Takođe generički BlueTooth uređaj je lako izmjenjiv, moguća je jednostavna do-standardizacija promjenom koda u BlueTooth upravljačkom mikroprocesoru bez mijenjanja glavnih osobina kompletne uloge mikrokontrolerske ploče. Primjer ovakvog sistema je dat slikom 4.1
Mikroprocesor za emulaciju HCI
BlueTooth-a koji podržava SPI standard.
Eksterna elektronska kola koja podržavaju SPI
standard za emulaciju Fast-USB HCI porta
Emulirani Fast-USB standardni
port.
Generički USB BlueTooth uređaj bez predefinisanog
HCI.
Slika 4.1 Princip kreiranja podrške za BlueTooth na mikrokontrolerima
4.3 Mikrokontrolerski GPIO/SPI/I2C/High-Speed UART BlueTooth modul
Karakteristika GPIO/SPI/I2C/High-Speed UART komunikacije je brzina pristupa i mogući FULL-DUPLEX režim rada. Sa tim prednostima postoje i BlueTooth moduli sa specifičnim GPIO/SPI/I2C/High-Speed UART pristupom. Kod ovakvih modula zahtjev za postojanje HCI je opcionalno, ako mikroprocesor ima dovoljnu moć obrade može se emulirati, u suprotnom slučaju može se koristiti modul sa postojećim HCI, gdje se zaobilazi viši nivoi BlueTooth hardverskog dizajna, i komunikacija se obavlja prosleđivanjem parametara i informacija. Ovakvi moduli se koriste ako se želi postići veća brzina pri komunikaciji, i ako se želi koristiti modul koji podržava više profila jer je ovakvim načinom stavljen imperativ na brzini pristupa i izmjeni parametara, brzom prijemu i predaji informacija.
29

Bežični monitoring kretanja i biosignala
OHCI 406/411 BlueTooth ModulPodržava High Speed UART i SPI
Spark Fun Blue Smirf extended modulePodržava GPIO i I2C
Slika 4.2 BlueTooth moduli
4.4 USART/UART/RS232 BlueTooth modul
Pri korišćenju USART/UART/RS232 BlueTooth Modula mora se obratiti pažnja da su to već komunikacioni standardi integrisani unutar određene hardverske realizacije. Nivo iskorišćenja ovakvih već predefinisanih komunikacionih standarda u medicinskoj elektronici se bazirao najčešće na informacijama kratke sadržine, variabilnog periodičnog ponavljanja i kratkim informacijama ili komandama koje zahtijevaju brz i pouzdan prenos. Iz tog razloga posmatrajući na nivou mikrokontrolerskog okruženja, najčešće se koristi parametrima prepodešen BlueTooth modul, koji je HCI postojeći, sa predefinisanim neizmenljivim profilom, gdje su parametri unutar profila već određeni, i neizmenljivi, i služi kao striktna zamena fizičkog kabla (Air-Cable). Cilj je u tome da se osposobi mogućnost “uključi i koristi” (plug-and-play) kao konacni cilj, a on nam je sama komunikacija, a ne razvoj komunikacionih sposobnosti mikrokontrolera i njegovog API(Application Interface). Vise o ovakvom režimu rada opisuje Serial Port Profile.
5. BlueTooth mrežna topologija
Prije nego se prikaže mogućnosti primjene BlueTooth osposobljenih uređaja u medicini važno je navesti nešto o BlueTooth mrežnoj topologiji i radnim karakteristikama BlueTooth uređaja unutar takve mreže.
5.1 Piconet topologija
30

Bežični monitoring kretanja i biosignala
Piconet se sastoji od dva ili više uređaja koji zauzimaju isti fizički kanal (smisao ovoga je da su sinhronizovani u odnosu na zajednicki sat i šemu preskakanja sa frekvencije na frekvenciju). Njihov zajednicki sat je sinhronizovan prema satu samo jednog uređaja u takvoj mreži, taj uređaj se zove “Gospodar piconet-a” (Piconet master). Šema skakanja po frekvencijama i vrijeme sata se preuzimaju sa piconet master-a. Svi ostali uređaji u piconet su robovi (slaves). Sama smisao riječi gospodar i rob je u kontekstu formiranja BlueTooth mreže a ne unutar same uloge uređaja u mreži. Kada se unutar bliskog fizičkog prostora nalaze više piconet-a, oni mogu da rade sinhrono iz jer njihov unutrašnji sat i šema skakanja na frekvencije je podešen u odnosu na gospodara mreže kojem pripadaju, tako da u realnosti je veoma mala šansa da će doći do interferencije između uređaja u svim postojećim piconet mrežama unutar bliskog prostora.
Svaka piconet mrežna topologija može imati jednog i samo jednog gospodara (piconet master) i maksimum sedam aktivnih robova (slaves). Ovo ne ograničava da, uređaji unutar piconet mrežne topologije, u određenom trenutku mogu da promijene svoj polozaj u hijerarhiji, tako da rob (slave) može da u određenom trenutku postane gospodar (master) i takođe da gospodar (master) postane slave(slave). Ova procedura je uvjek takva da dolazi do kidanja mreže, promjene uloge uređaja i ponovnog formiranja mreže. Samo ogranicavanje na jednog gospodara čini ovu mrežu baziranu na topologiju zvijezde. Komunikacija između robova mreže ne postoji već se koristi pooling metod, gdje gospodar mreže (master) poziva roba (slave) i trazi nove informacije koje će biti proslijeđene drugom BlueTooth uređaju (bilo da je slave unutar iste piconet mreže ili master unutar druge piconet mreže) ili obrađene. Generalne osobine piconet mrežne topologije su date listom i prikazane na slici 5.1:
Maksimum 1 gospodar (master) Maksimum 7 robova (slave) Komonikacija se obavlja samo na novou
gospodar-rob. Svaki član piconet mreže može biti
gospodar ili rob. Sat i šema skakanja po određenim
frekvencijama se sinhronizuju u odnosu na gospodara (master-a) piconet mreže.
Slika 5.1 Piconet mrežna topologoja
5.2 Scatternet topologija
BlueTooth uređaj može pripadati i postojati unutar više piconet mreža i takva organizacija mreže se naziva scatternet. Scatternet topologija ima sve osobine piconet topologije plus neke dodatne karakteristike.
Osobine scatternet topologije su:
31

Bežični monitoring kretanja i biosignala
BlueTooth uređaj u master režimu može komunicirati maksimum sa sedam uređaja unutar mreže.
BlueTooth uređaj može pripadati beskonačnom broju piconet mreža ali može biti gospodar (master) samo u jednoj.
BlueTooth uređaj u rob (slave) režimu može komunicirati samo sa jednim masterom unutar jedne piconet mreže, a može pripadati unutar beskonačno mnogo piconet mreža.
Scatternet topologija podržava p2p (“point to point” od tačke do tačke) i p2mp (“point to multipoint” od tacke ka vecem broju tački) distribuciju podataka.
Sve piconet mreže unutar scatterneta moraju imati:o Drugačiju vrijednost sata gospodara (mastera)o Različitu sinhronizacijuo Drugačiju šemu skakanja po frekvencijamao Ne smiju biti slično ili isto sinhronizovanio Pooling tajmer unutar više povezanih piconet-a ne smije da se prekalapa ako postoji
međusobni pripadajući član.o Pripadnost člana unutar više piconeta se riješava TDM (time division multiplex)
metodom, gdje tokom svog rada izlazi iz jedne piconet mreže a ulazi u drugu. Ovo je ciklicna procedura i vrijeme koliko dugo pripada određenom piconetu zavisi od broja piconet-a kojima taj član pripada.
Slika 5.2 Scatternet mrežna topologija
6. Primjena BlueTooth uređaja
Medicina, kao jedna od glavnih pokretača za razvojem novih tehnologija i uređaja baziranih na tim tehnologijama, je takođe i glavni potrosač iste. Sama količine primjene određene tehnologije, uređaja i rješenja baziranih na istoj ukazuje koliko je ona dobra, da li je treba dalje razvijati i koje su joj buduće primjene. BlueTooth kao jedan takav produkt, nasao je primjenu u medicini unutar segmenta pouzdanog prenosa informacija na kratkim rastojanjima. Nivo različitih mogućnosti, jednostavnosti protokola
32

Bežični monitoring kretanja i biosignala
obezbjeđuje mu primjenu koja je ograničena maštom čovjeka koji vrši razvoj baziran na ovoj tehnologiji. Jedna od glavnih osobina BlueTooth-a je u tome što može da bude tehnologija nadogradnje, i prilagodljiv je postojećim žičnim komunikacionim tehnologijama.
6.1 Primjena u medicini
BlueTooth primjena u medicini je ograničena svrhom uređaja, sobzirom na njegov kratak domet i bilo kakva intervencija koja se obavlja kao posledica je ljudska ili u krajnjem slučaju ljudski kontrolisana. Striktno se primjena vezuje za monitoring, kako aktivni tako pasivni. Kada govorimo o monitoringu pacijenata i o napretku tehnologija uređaji postaju sve manji, kompaktniji, robustniji, troše manje energije i u pojedinim slučajevima duži im je vijek trajanja. Monitoring može biti u realnom vremenu, ili monitoring hronološki zapisanih podataka u zavisnosti od potreba. Važno je naglasiti da monitoring sa žicama u određenim situacijama može biti veoma komplikovan jer vrijednosti koje se mjere mogu imati frekvencije u spektru od 10 Hz do 190 Hz, što nas prisiljeno dovodi u spektar elektromagnetne interferencije nad postojećim žičanim uređajima. Razvoj medicine dovodi do toga da ona postaje sve komplikovanija, da ideje o optimizaciji procedura i medicinskom monitoringu postaju sve zahtjevnije i najčešće idu ispred mogućnosti razvijenih tehnologija. Suprotno tome medicina veoma teško prihvata nove tehnologije, iz razloga nedokazane sigurnosti koja se može jedino stvoriti sa vremenom korišćenja uređaja. Ovakva ciklična logika dovodi do toga da adaptacija nove tehnologije u medicini vremenski dugo traje i veoma je zahtjevan proces.
U medicinskoj praksi BlueTooth se koristi najčešće za:
Lokalni i daljinski monitoring pacijenata Bežično očitavanje biometriskih podataka
U medicini termin mjerenje se mora uzeti u smislu očitavanja određenih vitalnih karakteristika, navešćemo neke od njih poređane po važnosti sl 6.1 :
1. Rad srca (EKG )2. Zasićenje kiseonikom (SPO2 )3. Glukoza (G )4. Temperatura (T )5. Praćenje moždanih talasa (EEG )6. Biometriski podaci (BD )7. Podaci, sportska medicina (SMD )
Slika 6.1Primjena BlueTootha
6.2 Lokalni i daljinski monitoring pacijenata
U zavisnosti od fenomena koji se posmatra, njegovo očitavanje može biti instantno ili neočekivano. Zato se i stvorila potreba za lokalnim i daljinskim monitoringom. U svakom slučaju, eliminacija kablova i
33

Bežični monitoring kretanja i biosignala
minimizacija je ona finalna stvar koja želi da se postigne. Navesćemo neke zamjenske primjere lokalnog monitoringa pacijenata:
Zamjena kablova pri očitavanju EKG. EKG je veoma važan, toliko da se u medicini on predstavlja kao kontrola koja je obavezna. Nepravilnost u radu srca označava stanje zdravlja tog organa ili njegovih okolnih arterija i vena. EKG monitoring eliminacijom žica stvara ljudsku interakciju i povećava mobilnost pacijenta, uređaji postaju ljudski orijentisani. Kada nije potrebna mobilnost, otklanjanje žica smanjuje vrijeme pristupa za neku urgentnu akciju.
Zasićenje kiseonikom. mjerenje zasićenja je dosta važno kod pacijenata na intezivnoj njezi. Mjerenje glukoze bežičnim putem. Mjerenje temperature bežičnim putem Praćenje moždanih talasa EEG. Ovdje postoji velika prednost kada se koristi BlueTooth iz
razloga jer se instantno i nenadano stvorilo otklanjanje elektromagnetne interferencije nad kablovima koja je bila prisutna na ranijim uređajima, jer se radilo sa malim vrijednostima i frekvencijama.
Očitavanje biometriskih podataka i prenošenje informacije. Unutrašnji monitoring sistemi. Podaci za sportsku medicinu. Postojanje žica je vezalo bilo kakvu akciju pri mjerenju na
ograničeni prostor oko instrumenta i veoma je komplikovalo samu proceduru. Uključivanjem BlueTooth uređaja stvorena je metoda za mjerenja prirodnih pokreta u realnoj interakciji unutar sportske medicine.
Svi ovi metodi govore o senzorskim elementima, ali moramo navesti i mobilne ručne terminale za automatsko primanje podataka pacijenta kada se doktor nađe u njegovoj blizini. Na ovakav način se mogu hronološki prikazati svi parametri i smanjiti vrijeme pregleda i pristupa informacijama.Daljinski monitoring se svodi na očitavanje podataka nakon određenog perioda vremena ili nakon dešavanja određenog fenomena. Takvi uređaji, kao BlueTooth osposobljeni holteri, daju mobilnost pacijentu iz razloga jer sam senzor je veoma mali, a uređaj u kojem se zapisuju podaci se nalazi u njegovoj blizini, i poslije određenog vremena ili fenomena on je sposoban da koristeći BlueTooth, poveže se sa GPRS uređajem i posalje podatke koje je snimio, izvrši notifikaciju pacijentu i doktoru. Takođe postoperativni kućni monitoring omogućava da se u slučaju povoljnog ili nepovoljnog ishoda na pacijentu može vršiti notifikacija dežurnog osoblja za pravovremenu reakciju. Praćenje dijabetisa, pacijent koji vrši mjerenje na uređaju šalje hronološki zapisane podatke doktoru o stanju šećera u krvi pod određenom dozom insulna koju koristi. U slučaju da koristeći trenutnu dozu insulina se ne postižu željeni rezultati, doktor će obavijestiti pacijenta o promeni doze ili načina doziranja. Ovo su samo neki od velikog niza primjera.
6.3 Bežično daljinsko očitavanje biometrijskih podataka
Ovo očitavanje je dosta rijetko, njegova primjena se svodi na očitavanje elektronskog kartona pacijenta. Napomena da ovaj karton pacijent nosi sa sobom u nekom obliku, i najčešće je za karton vezan neki parametar daljinskog monitoringa pacijenta. Kao primjer operacije srca i postoperativni daljinski monitoring, ako dođe da hitnog slučaja, doktori koji reaguju na licu mesta pomoću elektronskog kartona očitavaju stanje pacijenta, i iščitavanjem podataka prije dešavanja fenomena, imaju neki uvid za bržu i pravilniju reakciju nad trenutnim stanjem pacijenta.
7. Primjer sličnih komunikacija i poređenje sa BlueTooth
34

Bežični monitoring kretanja i biosignala
Postoje mnogi bežični komunikacioni standardi sa većim ili manjim stepenom iskorišćtenja, same kompleksnosti i samostalnosti rada. Od te liste standardizovanih načina komunikacije, najblizi BlueTooth-u po svojim sposobnostima i načinu rada je ZigBee.
7.1 ZigBee-opis rada i topologija
ZigBee je standard čiji razvoj prati ZigBee Alijansa, globalni konzorcijum od preko 50 različitih svjetskih kompanija koje sačinjavaju OEM-s (Original equipment manufacturer), proizvođaci čipova i kompanije koje se bave razvojom tehnologija i njihovom mogućom primjenom.
Specifično ZigBee ima strukturu lokalne mreže koja je dizajnirana u cilju da zamijeni i unificira daljinsko upravljanje i senzorske uređaje. Njegove osobine su niska cijena proizvodnje i integracije, standardizovani način komunikacije koji podržava malu brzinu prenosa podataka, naglašeno veoma mala potrošnja energije, sigurnost informacija i pouzdanost u radu. Softwerski nivo i standarde bilo kojeg ZigBee uređaja strogo je kontrolisan i unificiran da bi se stvorila konformnost rada nezavisno od hardverskog proizvođača. ZigBee sam po sebi je standardizovan do te mjere sa predefinisanim mogućnostima, da njegova upotreba suštinski može da se prevede na upotrebu u daljinskom upravljanju i senzorskim primjenama sa veoma malim ili nikakvim varijacijama. ZigBee razvoj se bazirao na OSI (Open Systems Interconnection ) modelu što ga čini veoma primamljivim za upotrebu. Njegov protokolni segment je podijeljen na nivoe. Prva dva nivoa su Fizički (PHY) i pristup uređaju (MAC media access). Ovi specifični moduli su definisani od strane IEEE 802.15.4 standarda dok sve nivoe iznad njih održava i definiše ZigBee Alijansa.
ZigBee kao i BlueTooth radi na nelicenciranom slobodnom opsegu u okolini od 2.4GHz. Kontinualni protok podataka koji može da postigne je 250Kb/s na 16 kanala, očekivana daljina dometa je od 10-75 metara, u zavisnosti od izlazne snage i radnih uslova sredine. ZigBee koristi direktni sekvencijski predefinisani spektar na 2.4GHz sa širinom između kanala od 5MHz sa modulacijom kvadratnim pomjeranjem faze. Zbog svoje jednostavnosti unutar arhitekture, ZigBee uređaj unutar svoje mreže može biti kao:
1. Kompletno funkcionalni uređaj (FFD-Full Function Device) U ovom režimu rada može da funkcioniše kao:
o Koordinator Personalne mreže u okruženju (PAN Coordinator)o Samo kao koordinatoro Uređaj unutar mrežeo Sve moguće osobine RFD
Osobine ZigBee FFD predefinisanog uređaja su:
Komunikacija sa bilo kojim drugim ZigBee RFD uređajem. Komunikacija sa bilo kojim drugim ZigBee FFD uređajem Svjestnost mreznog okruženja, samostalnog rada i kontrole RFD uređaja.
2. Uređaj sa smanjenim funkcijama (RFD-Reduced Function Device) U ovom režimu rad može da funkcioniše kao:
o Izvor informacije
35

Bežični monitoring kretanja i biosignala
o Konačni izvršlac primjene
Osobine ZigBee RFD predefinisanog uređaja su: Komunikacija samo sa jednim ZigBee FFD uređajem istovremeno Nema informacije o topologiji Nema samostalnost rada Izvrsna tačka neke primjene (senzor, prekidač….)
Sistem koji zadovoljava IEEE802.15.4 standard se sastoji od niza različitih elemenata. Najjednostavniji je uređaj koji može biti FFD ili RFD. Dva ili više uređaja u okviru Personalnog operativnog prostora (POS) koji komuniciraju na istim fizičkim kanalima formiraju Bežičnu Personalnu Mrežu (WPAN). Takva mreža mora imati bar jedan ZigBee FFD, koji radi u režimu PAN koordinatora. U zavisnosti od primjene, WPAN može se razvrstati u dvije osnovne mrežne topologije koje se mogu međusobno kombinovati i razviti kompleksna struktura, a one su:
1. TOPOLOGIJA ZVIJEZDE
Unutar topologije zvijezde, komunikacija između uređaja se obavlja preko jednog centralnog kontrolera, uređaji se ne obraćaju jedan drugome direktno, već indirektno, i mora posoajati minimum jedna razdvojna tačka između njih, a ta tačka je kontroler komunikacije. Uređaj najčešće ima neku specifičnu primjenu i kao takav je početna ili krajnja tačka komunikacije. PAN koordinator može imati neku primjenu, ali se najčešće koristi za uspostavljanje ili preusmeravanje komunikacije kroz mrežu. PAN koordinator je glavni kontroler PAN mreže. Svi uređaji koji se nalaze u mreži nezavisno od topologije imaju unikatnu 64-bit adresu koja se može koristiti za pozivanje uređaja ili im može biti dodijeljeno kraće ime za lakšu i bržu komunikaciju. Primjena ovakve topologije ima smisla kada se iz jedne centralne jedinice upravlja svim elementima, monitoring bilo koje vrste, PC, Autonomna robotika.
2. TOPOLOGIJA OD TAČKE DO TAČKE (P2P)
P2P takođe ima PAN koordinatora, ali ovdje uređaji komuniciraju direktno, sve dok su u dometu jedni od drugih. P2P je teže implementirati, ali se sa njom postiže ogromna količina autonomnosti, kontrolne logike, sigurnosti same mreže, auto-monitorniga sa ili bez notifikacije, može biti samo-organizujuća, samo-dijagnostička i samo-zaceljujuća i Ad-Hoc. PAN koordinator služi da probudi svijest kompletne mreže i da izvlači trenutno stanje iz nje. Najčešće između dva uzastopna pristupa PAN koordinatora, mreža će promijeniti svoju strukturu.
36

Bežični monitoring kretanja i biosignala
7.2 Poređenje BlueTootha i ZigBee sistema
Pošto su ove dvije tehnologije dosta slične ovdje je predstavljena osnovna razlika između njih i koje su tendencije njihove upotrebe. Razlike su date u tabeli 7.1.
TABELA POREĐENJA BlueTooth ZigBee
Modulacija FH -DPSK PSK
Frekvencija rada 2.4GHz 2.4GHz
Broj mogućih profila Veliki Mali
Primjena u Industriji i Medičini Zamena kablova Monitoring i kontrola
Sistemski resursi 250KB 4-32KB
Operativni moduli u istoj mreži 7 255 ili 65535
Kolicina protoka (KB/s) 720 KB/s 20-250 KB/s
Daljina dometa 1-10+ 1-75+
Problemi Manja Interferencija Interferencija
Trajanje baterije (dani) 7 1000+
Integracija Jednostavna Komplikovana
Kreiranje novog člana (slave) >3s 30ms
Buđenje i početak prenosa >3s 15ms
Promena toka komunikacije 2ms 15ms
Tip mrežeAd-Hoc Ad-Hoc, Statička,
Dinamička
Glavni razlozi primjene u monitoringu i kontroli.
Cijena, veoma laka integracija, komfort,
moguće usluge.
Stabilnost, ekstremno niska cijena, veoma dugo
vrijeme baterije.
Tabela 7.1 Poredbena tabela BlueTooth i ZigBee
37

Bežični monitoring kretanja i biosignala
7.3 Zaključak primjene BlueTooth i ZigBee sistema
Iz navedenih osobina ZigBee i BlueTooth, može se zaključiti da sama primjena određenog vida komunikacije striktno zavisi od primjene za koju je predviđen uređaj. ZigBee model ima ekstremno dugo radno vrijeme, jednostavnost komunikacije, brzo vrijeme reagovanja, dok BlueTooth ima veću sigurnost, i brzinu prenosa podataka. Sami modeli, od trenutka kreiranja su bili predviđeni za određenu ulogu. BlueTooth je versatilniji od ZigBee, može da podrzi više profila i vidova komunikacije, dok ZigBee može da brže pristupi uređajima i ostvari neki vid kontrole.
38

Bežični monitoring kretanja i biosignala
8. Wireless mašina
“Sto se ne može izmjeriti, ne može se ni kontrolisati”
Wireless mašina je uređaj bilo kojeg tipa ili namjene, gdje je provjera rada, kontrola ispravnosti samog sistema, upravljanje ili samo-upravljanje i prenos informacija o procesu fizički razdvojeno na minimum dva ili više radna prostora. Treba napomenuti da svaki od radnih prostora može proizvoljno biti statički ili mobilni. Unutar arhitekture Wireless mašine postoje dva osnovna segmenta koja obezbjeđuju pravilan rad:
1. Wireless kontrolni sistem (Wireless control system )2. Wireless monitoring sistem (Wireless monitoring system )
Važno je napomenuti da kontrolni sistem, mora da postoji ali nije važno na kojem će se on kraju nalaziti, jer samo prisustvo neke kontrole, nevažno da li je automativna ili dijagnostička, zajedno sa monitoring sistemom čine ovakav tip mašine.
8.1 Wireless kontrolni sistem
Wireless kontrolni sistem čini upravljački segment jedne Wireless mašine. On obezbjeđuje pravilan i siguran rad iste. Odluke o upravljanju te mašine se dobijaju na osnovu informacije o radu iste. Unutar ovog sistema postoji dva pod-elementa koji utiču na pravilan rad:
1. Izvršni organ
Izvršni organ, je dio kontrolnog sistema, koji obezbjeđuje direktnu kontrolu nad svim operativnim članovima mašine. Inteligencija takvog organa se uvjek želi postaviti na najvišem mogućem nivou, što direktno utiče na pouzdanost tog sistema i njegov rad. Najčešće se unutar njega postavljaju parametri, koji se u svakome slučaju u toku rada te mašine moraju ispoštovati. Ovdje se direktno želi obratiti pažnja na inteligenciju, samosvjestnost sistema i uslova rada mašine.
2. Parametri sistema.
Parametri sistema, preko izvršnog organa, indirektno vrše korekciju rada mašine. Termin korekcija je iz razloga što se uvjek utiče na nezadovoljavajući rad mašine, bilo da je slučaj autoregulacije ili novog parametra koji se želi ispuniti u radu mašine. Parametri sistema se mogu generisati automatski ili manualnim unošenjem. Razdvajanje se vrši zbog važnosti odluke i kakvu će ona imati uticaj na rad mašine.
Prosleđivanjem parametara sistema izvršnom organu bežičnim putem je ono što predstavlja Wireless kontrolni sistem. Generisanje parametara i analiza podataka primljenih wireless monitoring sistemom se ostavlja kontrolnoj logici ili čovjeku koji vrši generalni monitoring rada i upravljanje nad mašinom.
39
Bežični monitoring kretanja i biosignala
8.2 Wireless monitoring sistem
Wireless monitoring sistem, kao što ime kaže, vrši bežično prikupljanje podataka, analizu i generisanje izvještaja nekoj upravnoj jedinici, autonomnom kontrolnom sistemu ili čovjeku. Pogrešno je pretpostaviti, da u sklopu takvog uređaja se nalazi i kontrolni upravljački segmenat. Wireless monitoring sistem, prema vremenu prosleđivanja informacija se dijeli na :
1. Monitoring u realnom vremenu2. Monitoring hronološki zapisanih podataka, fenomena3. Hibridni monitoring.
Monitoring u realnom vremenu
Koristi se kada želimo da znamo kakvo je trenutno stanje našeg mjerenog parametra nezavisno da li mjereni parametar je u dozvoljenom opsegu ili ne. Najčešće se ovakav monitoring koristi kod promjena koje se dešavaju veoma brzo, i na koju treba odreagovati brzo. Ovakav sistem je veoma skup i pouzdan iz razloga što su procesi koji se prate veoma važni. Primjeri su monitoring rada, srca, pulsa, pritiska i zasićenosti krvi kiseonikom, postoperativnih pacijenata na intenzivnoj njezi. Od ovakvog sistema se mora očekivati da bude veoma pouzdan.
Monitoring hronološki zapisanih podataka, fenomena
Ovakvim načinom se izvlače statistički podaci i prate promjene koje su često nepredvidive i na koje se u ogromnom broju slučajeva ne može uticati direktno, već indirektno. Periodičnost njihovog ponašanja nije u fokusu već je važno koliko se statistički često pojavljuju u okviru nekog vremenskog intervala. To se može uvidjeti samo posmatranjem fenomena i zapisivanjem informacije o istom. Jedan takav primjer je holter, medicinski uređaj za praćenje pravilnog rada srca. U trenutku kada srce ima nepravilan rad on izvršava zapis o tome koji će se kasnije uočiti i odrediti pravilna dijagnoza.
Hibridni monitoring
Hibridni monitoring predstavlja kombinaciju monitoringa u realnom vremenu i hronološki zapisanih podataka. Pojava ovakvih sistema je veoma rijetka i specifični su slučajevi njene upotrebe. Najčešće se koriste kada se vrši hronološki monitoring određene funkcije i kreiraju statistički podaci. Međutim u slučaju neke određene pojave koja je definisana kao upozoravajuca (bilo da li je ta pojava povoljnog, nepovoljnog ili neutralnig karaktera), dolazi do prekida hronološkog monitoringa, i prelaska na monitoring u realnom vremenu. Jedan takav primjer je mjerenje šecera u krvi, automatska insulinska pumpa, mjerenje potrošnje goriva autonomnih motora sa notifikacijom na kritičnu preostalu količinu.
U zavisnosti od potrebe, namjene, i uloge uređaja koji ima određeno mješto u hijerarhiji Wireless monitoring sistema, mogu se podijeliti prema ulozi, hronologiji i koracima postupka samog sistema na:
1. Izvore informacije (Uređaj koji vrši generisanje i slanje informacije )2. Kolektore informacije (Prijem, skladištenje i predaja infromacije )3. Obrada informacije (Uređaj za obradu i generisanje izveštaja )
40

Bežični monitoring kretanja i biosignala
Prema ovakvoj podjeli u zavisnosti od integracije različitog nivoa inteligencije unutar Wireless monitornig segmenata sistema, najčešće u praksi dolazi do spajanja dva člana unutar ovako prikazane hijerarhije. Takođe je moguće integrisati sve članove ali se takav primjer veoma rijetko sreće. Iz ovoga slijedi da postoje kombinacije:
1. Izvor-Kolektor Informacije2. Izvor-Obrada informacije3. Kolektor-Obrada informacije4. Izvor-Obrada-Kolektor informacije
Razlog integracije unutrašnjih sistema, je u tome da li se vrši obrada informacije u realnom vremenu, ili statističkom prikupljanju podataka.
1. Izvor- Kolektor informacijePredstavlja klasični primjer statističkog Wireless monitoringa, gdje se na istom mjestu vrši generisanje informacije i njeno skladištenje. Skladištenje se vrši unutar nekog memorijskog modula, najčešće memorijske kartice. Osobina ovakvih modula je da su: statični, prilaskom Korisnika&Uređaja automatski se vrši, autorizacija, prosleđivanje sistemskih parametara, i ako nije sistemskim parametrima eksplicitno definisno, predaja informacije, brisanje informacije koja je poslata, slanje informacije o samodijagnostici sistema.
2. Izvor-Obrada informacijePredstavlja klasičan primjer Wireless monitoringa u realnom vremenu, gdje se na istom mjestu vrši generisanje informacije, obrada, i prosljeđivanje. Ovakav sistem se koristi najčešće ako je u pitanju korišćenje M2M ili sličnog protokola komunikacije, gdje je važno veoma brzo i sigurno proslijediti informaciju o trenutnom stanju, i u većini slučajeva na takvu informaciju o stanju se dešava neka kontrolna reakcija.
3. Kolektor-Obrada informacijeSluži u arhitekturi Wireless monitoringa za prijem podataka, obradu informacija i njeno skladištenje u unutrašnjoj memoriji. Ovim podacima se može pristupiti po želji u bilo kojem vremenskom trenutku. Njčešće se ovakav model koristi za dobijanje informacije o kvalitetu nekog autonomnog samokontrolisanog procesa. Ovakvi uređaji su najčešće spojeni sa nekim Wireless kontrolnim segmentom i prestavljaju Wireless Machine, i najčešće su u obliku interaktivnih terminala sa visokim stepenom integrisane inteligencije o kontroli parametara unutar procesa koji se posmatra.
4. Izvor-Obrada-Kolektor informacijeJe veoma rijedak kao arhitektura Wireless monitoringa i koristi se u veoma dinamičnim i teškim uslovima monitoringa i kontrole, gdje je potrebna obrada podataka u realnom vremenu, sa velikom sigurnošću. Karakteriše je visoki stepen provjere pravilnosti informacija sa izvora, sa ekstremno velikom integrisanom inteligencijom unutar kontrolnog procesa, gdje parametri informacije zavise od prošlog, trenutnog i predviđanja budućeg stanja. Jedan takav primjer je mjerenje brzine izvlačenja neutronskih kotrolnih šipki iz nuklearnog reaktora. Sam pristup i očitavanje treba da bude u realnom vremenu, međutim, uslovi rada konstantno mogu da utiču na pravilan prenos informacija.Tada se informacija skladišti i prosleđuje istovremeno, a brisanje uskladištene informacije se ne vrši jer je potrebna za generisanje izveštaja o kvalitetu monitoringa.
41

Bežični monitoring kretanja i biosignala
8.3 Neke od mogućih primjena Wireless mašina u medicini
Automatizacija: Kontrola i proračun rada; Kompjuterska mumjerička kontrola pokreta i pozicioni kontroleri; Upravljački Sistemi na čipu; Operacioni paneli; Mjerni procesi i senzori stanja; Prekidačke sigurnosne kontrole; Robotika;
Ručni, Udaljeni terminali: Terminali bilo koje klase, čitaci kartica;Štampači;Skeneri
Testiranje i mjerenje:Testiranje i mjerenje ispravnosti; Testiranje bežičnih komunikacija; Mjerenje fizičkih veličina bilo kojeg reda; Kalibracija instrumenata;
Potrošačka medicina:Mjerenje šećera u krvi;Mjerenje pritiska; Mjerenje holesterola;Mjerenje rada srca i pedometri; Elektronski termometri;Testovi trudnoće; Testiranje plodnosti;
Medicinski instrumenti:Medicinski uređaji sa vizuelnim prikazom(Ultrazvuk, Magnetska rezonancija; CT/PET/PET-CT skeneri; Analogni/Digitalni Rentgenski snimci;Dijagnostika i terapija;Aktivni i pasivni monitoring bilo koje vrste;
ENERGIJA:AC/DC Izvori;DC/DC-DC/AC-AC/AC-AC/DC inverter i konverteri;
42

Bežični monitoring kretanja i biosignala
9. RTOS (Real time operating system - operativni sistem u realnom vremenu)
Operativni sistem u realnom vremenu, engleska skraćenica RTOS, je biblioteka funkcija koja implementira pravila za alokaciju resursa bilo kakve procesorske moći orijentisana sa strane vremena, tako da je vrijeme alokacije resursa i izvršavanje instrukcija što kraće.
9.1 Definicija RTOS-aRTOS određuje koje aplikacije se pokreću, kojim redosledom, i koliko vremena će određena aplikacija trajati prije nego što se procesorska moć odobri drugoj aplikaciji a uskrati onoj koja je već pokrenuta.RTOS ima za cilj da u što kraćem vremenu :
Upravlja internim memorijskim resursima između višestrukih aplikacija. Upravlja ulaznim i izlaznim uređajima i kontroliše periferni hardver ili postojeće blokove, kao što
su serijski port, memorijski busevi,A\D D\A i I\O kontrole itd.
Šalje poruke i izvještaje o statusu operacije ili o nekoj grešci koja se desila.Pošto se govori o operativnom sistemu koji reaguje na specifična dešavanja u njegovom okruženju i pokreće shodno tome određenu aplikaciju i proceduru, mora se obratiti pažnja na njegov dizajn i pravila. Pošto je nerijetko da se više dešavanja koji su od interesa pojave u istom trenutku ili njihova dešavanja se preklope u nekom vremenskom intervali mora se vidjeti kakav je dizajn ovog sistema. Dobar dizajn RTOS-a sadrži se u tome da u svakom trenutku se moze predvidjeti kako će on odreagovati u određenoj situaciji i koje će instrukcije izvršiti. Ovo se najbolje postiže tako što se odrede striktna pravila o ponašanju RTOS-a u nekoj situaciji i koja su dešavanja od prioriteta i kako se rješavaju konflikti.
9.2 Razlozi korišćenja RTOS-a
Pojednostavljuje kompleksnost programiranja i poznavanja arhitekture jer je ona već definisana nekim kernelom.
Daje odličnu infrastrukturu konstruisanu nad setom pravila koja omogućavaju ustaljenost ponavljanje određenog procesa.
Pojednostavljuje razvoj i implementaciju novih pravila. Jednostavno i brzo upravlja svim softverskim i hardverskim resursima bilo koje primjene. Povećava jednostavnost u održavanju i dijagnostici sistema i kvaliteta istog.
RTOS spaja sve navedeno u jednu cjelinu nezavisno od platforme za koju je konstruisan, tako da on postaje alat sa kojim se izvršava određeni posao a ne i sami posao.
9.3 Osobine i funkcije RTOS-a
Svaki RTOS treba da bude tako dizajniran i konfigurisan da njegove performanse odgovaraju namijenjenoj primjeni i to:
Da bude sposoban da pravovremeno reaguje i sinhronizuje se na dešavanja koja prati. Da brzo, efikasno interno ili eksterno prosljeđuje i obrađuje podatke i informacije. Da efikasno upravlja procesima u vremenu.
43

Bežični monitoring kretanja i biosignala
Da se ponaša po ustaljenim pravilima, da brzo riješava konflikte i da nedozvli do pojavljivanja istih.
9.4 Upravljanje resursima sistema
Jedna od glavnih funkcija za koju se može reći da je najosnovnija, je samo upravljanje resursima u vremenu. Ako se ovaj dio u dizajnu i implementaciji RTOS-a riješi pravilno tada se mnogo pojednostavljuje sama konfiguracija i implementacija sistema. Pošto se svi resursi platforme međusobno dijele između dva ili više procesa, tada se moraju poznavati određene činjenice u cilju pravilnog upravljanja, a one su:
Memorija sistema u bilo kojem slučaju je konačna i mora se stvoriti set pravila kako se ona raspodjeljuje između procesa
Procesorska jedinica radi mnogo brže nego sami procesi koji se prate ili upravljaju, tako da se ona može dijeliti između različitih procesa u cilju da se ne bi stvorila zakašnjenja u radu
Vrijeme je najvažni resurs koji se mora raspodijeliti između datih procesa koji se ponavljaju
Kernel koji je vezan za platformu mora biti konfigurisan tako da svaki proces izvršava za što kraće vrijeme i da se rezultat može predvidjeti. Brzina izvršavanja je ono sto i definiše brzinu rada jednog RTOS-a. Zašto se napominje cijelo vrijeme da se rezultati mogu predvidjeti? Leži u tome da RTOS radi samo sa poznatim vrijednostima i rezultatima, sve što izlazi van ovog opsega prelazi u konflikt ili izlazi van upotrebne sfere RTOS-a. Raslojavanje funkcija u klasama na nivou kernela, koje su potrebne da bi se određeni proces izvršio, i poznavanje samog procesa koje klase i funkcije u kernelu su mu potrebne, dovodi do toga da se određeni proces brže izvršava jer on tačno koristi ono što mu je potrebno.
9.5 Hard i SOFT REAL-TIME
Proces koji se mora obaviti u okviru određenih vremenskih okvira, da bi se izbjeglo kašnjenje, greške u podacima ili najgorem slučaju pad sistema se zove HARD REAL-TIME PROCES. Sistem mora imati jedan, a može imati i više ovakvih procesa. Da bi se ovi procesi izvršili u okviru njihovih vremenskih okvira bez konflikta, koristi se predviđanje rasporeda njihovog izvršavanja, tako da se svaki proces izvršava bez prekidanja u radu. U okviru predviđanja mora se imati uvid u:
Koliko vremena je potrebno da se proces obavi Koliko sličnih procesa može zahtijevati procesorsko vrijeme Koji je najčešći proces koji nailazi Koji prioritet nosi taj proces
U okviru ovih parametara kreira se tabela sa listom prioriteta izvršavanja. Ova tabela može biti statička ili dinamička. Ako je dinamička, najčešće se mijenja sam par procesa u okviru te liste i veoma je lako predvidjeti koji. Najčešći procesi ovog tipa su prihvatanje podataka sa periferija i njihova obrada, jer je važno da se pravovremeno podaci pokupe i obrade što prije.
Ostali procesi koji se izvršavaju se zovu SOFT REAL-TIME PROCES. Oni se načešće se ne moraju izvršiti u okviru određenog vremenskog prozora i kao takvi imaju nizak prioritet važnosti. Oni se najčešće obavljaju kada procesorska jedinica ne obrađuje HARD REAL-TIME proces, a pauziraju svoj rad ako HARD REAL-TIME proces zahtijeva procesorsko vrijeme, nakon toga ga nastavlja kad se HARD
44

Bežični monitoring kretanja i biosignala
REAL-TIME procesi završe. U nekim slučajevima ne pauzira svoj rad nego ga svaki put započinje od početka. To su najčešće procesi komunikacije i informacije ka hostu, zapis na memorijsku karticu itd.
9.6 Multitasking
Multitasking u realnosti glavna prednost i osobina RTOS-a. Bazira se na osnovnim principima koji prati sve moderne procesorske jedinice. U realnosti procesorska jedinica je mnogo brža od većine procesa koji se izvršavaju i posmatraju. Takođe, ona još uvjek ne može da obavlja više od jedne zadate operacije. U cilju da se obezbiedi višestruka upotreba za različite procese, koristeći istu procesorsku jednicu, kreirao se multitasking sistem. Ako bi se razdvojio zamišljeni sistem na različite procese i veoma brzo prebacivao procesorsku jedinicu sa jednog procesa na drugi treći itd ciklično ili u zavisnosti od tabele prioriteta, izgleda kao da se svi procesi izvršavaju istovremeno. Ovo je moguće iz razloga jer neki procesi zahtijevaju nešto da se desi i u tom trenutku oni čekaju paodatak, dok za isto vrijeme čekanja drugi proces može da se izvrši. Kao primjer imamo HARD REAL-TIME proces koji prikuplja podatke sa A/D konvertora i čeka flag da se konverzacija izvršila, za to vrijeme čekanja moguće je da neki SOFT REAL-TIME proces izvrši svoju operaciju ili dio nje. Ovako se najbolje koriste svi sistemski resursi u vremenu. Prebacujući se sa jednog procesa na drugi formira se osnova multitaskinga.
9.7 Prioriteti i previđanja
Prioriteti i predviđanja postoje da bi se osiguralo maksimalno iskorišćavanje procesorskog vremena u multitasking režimu i da bi se brzo i pravilno prešlo sa jednog procesa na drugi. Da bi ovo funkcionisalo pravilno moraju se znati:
Vrijeme prelaska sa jednog procesa na drugi Koji je sledeći proces Količina memorije potrebna za skladištenje informacija iz trenutnog procesa Količinu memorije potrebne za sledeći proces Da li je pokrenuta neka operacija nad periferijama i za koliko će se ona završiti i koja je njena
povezanost sa nekim HARD REAL-TIME procesom.
9.8 Modeli rezervisanja i predviđanja prioriteta
Pošto vrijeme za koje će se neki proces izvršiti zavisi od njegovog prioriteta postoje različiti modeli rezervisanja mjesta na listi prioriteta od kojih će biti prikazana 2 koji se najčešće koriste.
Ciklična rezervacija prioriteta, koristi se ako procesi koji imaju isti ili sličan nivo prioriteta zahtijevaju procesorsko vrijeme. Procesorska jedinica se dodjeljuje naizmjenično, ciklično i sa jednakim trajanjem procesorskog vremena.
Predviđajuća rezervacija, koristi se ako sam sistem zna da HARD REAL-TIME proces će da bude uskoro aktiviran i da je spreman da bude aktiviran. Tada on uzima vrijeme procesorske jedinice dok se osnovni elementi tog procesa ne izvrše.
45

Bežični monitoring kretanja i biosignala
Važno je napomenuti da HARD REAL-TIME procesi su najčešće veoma kratki i u realnosti uzimaju veoma malo procesorskog vremena, ali je važnost njihovog pravovremenog izvršavanja velika u cilju da bi kompletan sistem pravilno radio.
9.9 Klase kernela
Sam RTOS radi na nivou seta struktura koje se zovu klase. Svaka od klasa ima operatore koji se zovu servisi kernela koji se pozivaju od strane procesa da bi se izvršila zadata operacija. Klase koje se uvjek nalaze u ovakvom sistemu su:
Proces uspostavlja i održava izvršavanje programskog koda mogu uspostaviti međusobno nezavisni mogu uspostaviti međusobnu komunikaciju i zavisnost na nivou podataka koje obrađuju
Međuprocesna komunikacijaMetodi prosleđivanja podataka između procesa mogu biti:
Binarni semafori- sinhronizovanje procesa i pojavljivanje podataka Mutex - dozvoljava procesu da preuzme privilegiju posjedovanja resursa Tajmjeri i alarmi - odbrojavanje i generisanje signala Memorijske particije - Upravlja sa RAM da bi spriječilo fragmentaciju Registri - prosljeđivanje fiksiranih veličina i podataka Poruke i mailboxovi - prosleđivanje promjenljive veličine podataka
Servisi kernela To su rutine koje se izvršavaju da bi se dobilo određeno ponašanje sistema. Kada proces zahtijeva određenu funkciju tada mu kernel dodjeljuje zahtjev za servisom kernela i nastavlja rad.
ISR (Interrupt Service Routine) -Informacija o pojavi važnog podatkaOvo je softverska rutina koja se aktivira da odgovori na pojavu podatka.
9.10 Prekid i pojava važnog podatka i njegovo upravljanje
Interrupt je generalno spoljna pojava iz nekog od perifernih elemenata sistema koji zahtijeva instantnu reakciju na njegovu pojavu. Kada se on desi, proces završava samo trenutnu instrukciju i ulazi u ISR klasu i tada on:
pamti trenutnu lokaciju unutar procesa koji se obavlja i sve njegove registre i memoriju suspenduje sve interrupte i fokusira se na onaj koji se desio započinje izvršavanje rutine baziranu na ISR podešavanjima i završava je do kraja vraća sve interrupte vraća se na proces koji se obavljao prije pojave interrupt-a
46

Bežični monitoring kretanja i biosignala
Pošto je RTOS kreiran zbog ovakve vrste podataka veoma je važno da su svi procesi koji se izvršavaju što kraći iz razloga brzog prelaska na interrupt. Sam proces interrupt-a mora biti veoma kratak jer se suspenduju svi ostali interrupt-ovi i za to vrijeme izvršavanja može doći do pojave novog, koji se neće registrovati, što bi bilo dosta loše jer RTOS je kreiran da brzo prihvata sva predviđena i nepredviđena pojavljivanja podataka od važnosti.
9.11 Akcija i kašnjenje
Promjena prioriteta i rezervacija resursa ne garantuje da će proces da se na vrijeme obavi. Mnogi drugi faktori, na koje se može i ne može uticati, moraju biti uključeni u takvo planiranje. Neki od faktora na koje se najčešće ne može uticati su: periodičnost pojave informacija, brzina procesorske jedinice, brzina memorije, sam hardverski dizajn platforme itd. Ostale na koje se može uticati i koje su važne su:
Vrijeme aktivacije-deaktivacije Vrijeme za koje je proces spreman za početak rada.
Vrijeme startovanja Vrijeme za koje proces počne da radi.
Vrijeme procesa Vrijeme za koje proces se izvrši bez prekidanja.
WCET Najduže vrijeme izvršavanja nekog procesa.
Rok izvršavanja Vrijeme za koje se proces mora izvršiti da bi bio validan.
Period Minimalno vrijeme izlaska iz procesa pri interrupt-u
Kašnjenje Vreijeme prelaska roka izvršavanja mora biti manje od nule.
RTOS sistemi su u toliko velikoj upotrebi da je baziranje na specifičan sistem nekorisno iz razloga jer postoji ogromna količina. Oni zavise od: procesorske jedinice, platforme, upotrebe, važnosti informacija, stabilnosti itd.
RTOS koji se koristi je TinyOS koji je našao svoju primjenu na platformama male potrošnje energije, brzog ulaska u radni režim iz režima čuvanja energije i da se najčešće koristi za primanje signala sa svojih periferija i prosleđivanja istih bežičnim putem.
47

Bežični monitoring kretanja i biosignala
10. Shimmer platforma
10.1 Osobine platforme
Shimmer je mala senzorska platforma kreirana i prilagođena za kretanje. Odlikuje ga accelerometar na tri ose, trokanalni EKG, memorijska kartica, režim niske potrošnje energije u radu, vremenski dugo prikupljanje i prosljeđivanje podataka, posjedovanje TinyOS RTOS i monitoring u realnom vremenu. Njegove glavne osobine i razlozi primjene date su u tabeli 10.1.
I/O
Accelerometar na tri ose koristeći MMA7361 1.5/6 G MEMs Tri LED diode Jedno akcijsko dugme i dugme za reset Pasivni vibracioni senzor za očuvanje radnog režima i baterije
Mikroprocesor
MSP430F1611 10 Kb RAM, 48 Kb flash 2 DAC 8 12bit A/D ulaza Niska potrošnja energije u neaktivnom režimu Dokazana upotreba u medicinskoj elektronici
Memorija 2 Gb MicroSD kartica Integrisan čitač kartice sa baznom stanicom Softwerska kontrola na hostu kada se poveže sa baznom stanicom
Komunikacija
802.15.4 Radio LR-WPANs Klasa 2 BlueTooth radio Modul RN-42 Automatski režim rada
Platforma Mobilna Veličina 53mm x 32mm x 15 mm Prilagodljiva okruženju
Baterija i radni režim
48

Bežični monitoring kretanja i biosignala
280 mAh baterija Integrisan punjač preko bazne stanice i USB porta Mjerenje napona i struje za notifikacije u radu Automatsko gašenje i prijavljivanje niskog baterijskog nivoa
Tabela 10.1 Osobine Shimmer platforme
10.2 Start sistema i njegova konfiguracija za rad
Kada se platforma startuje ili resetuje Shimmer modul izvršava kod upisan u sebi. Kako bi se došlo do toga koda i mijenjao isti u nekom cilju sakupljanja podataka mora se pratiti procedura.
Punjenje-Promena firmver-a
Shimmer modul se postavi na baznu stanicu gdje se i pravilno prijavi. Koristi se softver BSL430 za MSP430 generaciju procesora. Startuje se BSL430, pri čemu on pokušava da detektuje platformu i da sam konfiguriše pravilno komunikacione portove (sl 10.1). Ako ne uspije da postavi pravilno portove potrebno je namjestiti ih ručno ili kliknuti dugme "Reload COM ports" da bi pokušali da se učitaju pravilno. Iz liste prikazanih firmware fajlova treba izabrati pravilan i kliknuti dugme "Program". Nakon toga, ako je sve ispravno konfigurisano i izabrano program se učitava u modul koji se nakon punjenja resetuje da pokrene nove instrukcije.
49
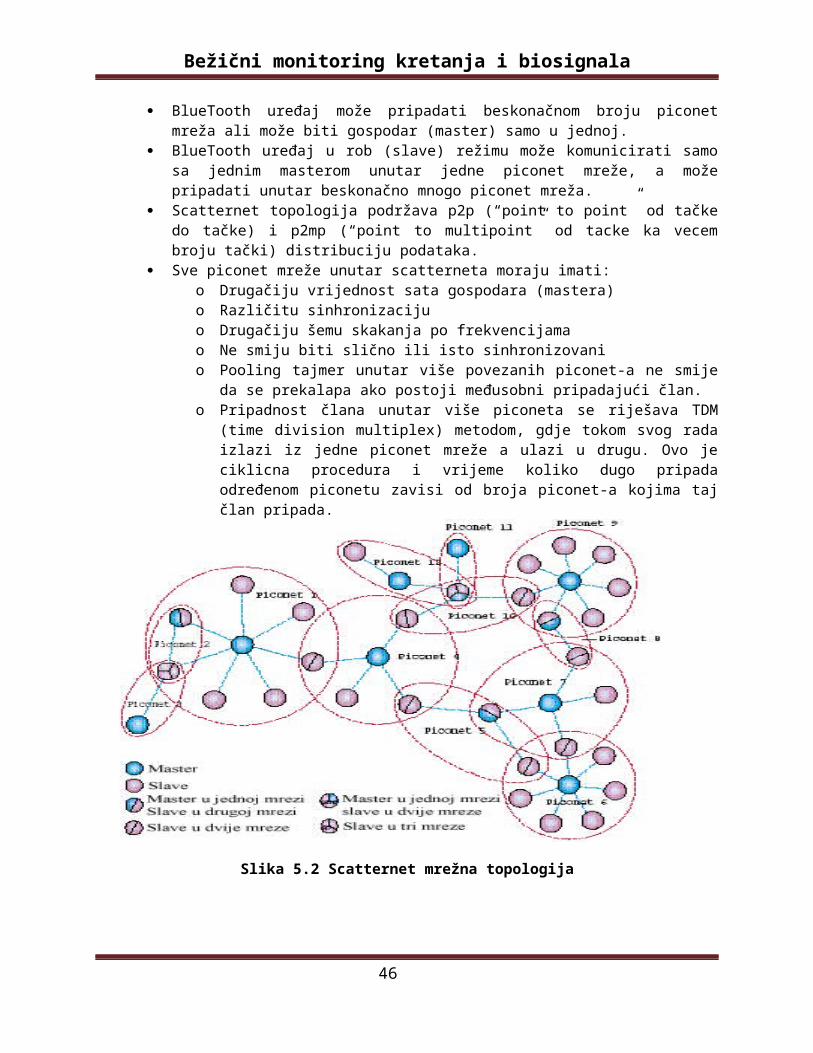
Bežični monitoring kretanja i biosignala
Slika 10.1 Prikaz softvera BSL430
Lista firmvera koja je data na slici 10.1 se nalazi u tabeli sa CSV formatom u istom direktorijumu kao i softver. Ako se želi izmijeniti i kreirati nova lista, mora se raditi po određenom pravilu inače softver neće dozvoliti promjene i odbaciće ih. Takođe, softver sam kreira listu poslije određenog vremena i obelježava je datumom kreiranja. Najčešće ta lista nije dovoljna za rad i mora se izmijeniti.
BlueTooth uparivanje
Pošto je sama BlueTooth platforma nezavisna od sistema na kojem se nalazi, prikazaće se metod uparivanja u glavnim crtama koje se moraju ispoštovati i koje su dovoljne da bi se ono uspješno izvršilo nezavisno od sistema.
Uparivanjem se autorizuje Shimmer modul da može da pristupi resursima sistema i da sistem ne zahtijeva više pretraživanje uređaja i autorizaciju pristupa resursima.
Shimmer uređaj mora biti van bazne stanice i baterija mu mora biti puna. Shimer uređaj se mora izložiti nekom fizičkom pomjeranju da bi se pasivni vibracioni senzor
aktivirao i probudio uređaj iz režima čuvanja energije. Na operativnom sistemu računara treba pretražiti za nove BlueTooth uređaje Kada se Shimmer modul pronađe on ima oznaku RN42-XXXX
50

Bežični monitoring kretanja i biosignala
XXXX predstavlja unikatan broj identifikacije internog BlueTooth modula i pomoću njega razlikujemo Shimmer module.
Kada se izabere BlueTooth modul RN42-XXXX mora se inicijalizovati "Uparivanje" Kada se pokrene uparivanje zahtijeva se unošenje četvorocifrenog broj kojim se autorizuju
BlueTooth moduli međusobno i on je 1234. Sistem je uparen i to se više ne zahtijeva dok postoji registar o postojećem BlueTooth modulu. Pošto je sistem uparen, tada se tražie svi profile koji taj BlueTooth modul podržava. Poslije pretrage postoji samo jedan profil i on glasi "SPP profil". Izabere se da mu je omogućena podrška a to pokreće instalaciju virtuelnog COM porta za "SPP
Profil". Poslije instalacije dobija se novi COM X port, gdje je X neki broj koji ga označava. Taj novi COM X port ima osobinu da je OUTGOING. OUTGOING osobina označava da je to COM port preko kojega operativni sistem mora
"probuditi komunikaciju" i on je inicijalizuje. To znači da Shimmer platforma ne može inicijalizovati i pokrenuti komunikaciju već mora biti inicijalizovana i pokrenuta od strane sistema.
Preko tog porta se obavlja sva komunikacija sa Shimmer platformom. Ako postoje višestruki Shimmer moduli, za svakog od njih se posebno vrši ovaj postupak. Za svaki od Shimmer modula kreira se i instalira novi virtuelni COM X Port i mora se paziti koji
je njegov broj da bi se pravilno pristupilo određenom modulu.
Osobine Virtuelnog COM X Porta
Pristupa mu se kao i realnom portu Rutine su iste kao i kod realnog porta Brzine komunikacija su veće nego kod realnog porta Pošto je softverski emuliran zahtijeva se da računar ima dovoljnu hardversku moć da može
izvršavati aplikaciju i emulaciju bez problema, jer dolazi do kašnjenja, obaranja protoka i greški. Najčešće su drajveri virtuelnog COM X Porta i samog BlueTooth modula sistemski ali se mogu i
koristiti neki od stak-ova kao BlueSoleil, Widcomm ili Toshiba koji su se dokazali na polju sigurnih i pravilnih BlueTooth komunikacija i čiji SDK ne zavisi od sistema.
10.3 Hardverski opis Shimmer modula
Glavni element sistema je MSP430F1611 mikroprocesor koji kontrolše i izvršava operacije nad modulom. Kompletno je iskoriste na svaka mogućnost ovog mikroprocesora. Sistem se interno kontroliše i konfiguriše preko I/O pinova od kojih neki mijenjaju svoju finkciju u zavisnosti da li je modul na bazi ili van nje. CPU ima osam integrisanih 12. bitnih ADC (analogno-digitalnih konverotra) koji su iskoriste ni da uzimaju podatke za EKG, kretanje, GSR, EMG i stanje baterije. Eksterni konektori dozvoljavaju komunikaciju ka i od modula koristeći bazu koja ima svoje COM portove emulirane preko USB-a.Modul ima integrisan MicroSD slot za dodatno smeštanje podataka u radu van realnog vremena, takođe tri indikatorske LED diode koje se mogu koristiti po potrebi za određenu funkciju. Za bežičnu komunikaciju opremljen je sa BlueTooth modulom i 802.15.4 Radio LR-WPAN-om. Ovu platformu opisuje, upravlja i prati RTOS TinyOS, koji je pouzdan, lako izmjenljiv i dosta modularan za MSP430 generaciju procesora. Sam sitem je otvoren i može se lako i jednostavno implementirati i mijenjati bez udubljivanja u njegovu realizaciju. Dizajn modula dat je na slici 10.2.
51

Bežični monitoring kretanja i biosignala
Slika 10.2 Hardverski dizajn Shimmer modula.
Sam dizajn modula kao gotovog produkta je neizmjenjiv, ne mogu mu se dodati ili redukovati hardverske funkcije zbog visokog stepena integracije i minimalizacije platforme. Svaka izmjena mora biti naručena i proslijeđena proizvođaču platforme koji sam odlučuje o implementaciji i izradi.Udubljivanje u hardversku realizaciju i njene mogućnosti nijesu od interesa, jer se koristi gotov produkt i kao takav nije za cilj da se poznaje njegova izrada i servisiranje istog već vršenje implementacije istog u ostvarivanju nekog cilja.
10.4 Opis format paketa komunikacije Shimmer modula
Ovdje su prukazani uobičajeni parametri za sve verzije Shimmer firmvare. Parametre su na engleskom jeziku zbog njihove generalizacje.
Connect : Povezuje BlueTooth host sa Shimmer modulom na nekom virtuelnom COM X portu.Start : Zadaje komandu Shimmer modulu da prosleđuje podatke u realnom vremenu sa ADC.Stop : Zadaje komandu Shimmer modulu da zaustavi prosleđivanje podatka sa ADC.Disconnect : Prekida vezu između BlueTooth hosta i Shimmer modula.
Komande Start / Stop i njihovi kodovi.SHIMMER_START 0x0 ^g Započinje semplovanje i slanje podataka
52

Bežični monitoring kretanja i biosignala
7SHIMMER_STOP 0x2
0SPACE Zaustavlja semplovanje i slanje podataka.
Formati paketa :
Tip 1.Informacije o paketu Informacije
BOF Sensor ID Tip podatka Broj frejma Vremensko obilježavanje Dužina podatka Podaci CRC EOF
8 bita 8 bita 8 bita 8 bita 16 bita 8 bita 1-255 bajta 16 bita 8 bita
Tip 2.Informacije o paketu Informacije
BOF SensorID
Tippodatka
Brojfrejma
Vremenskoobilježavanje
Dužinapodatka
ACC1
ACC2
ACC3
EKG 1
EKG 2
Lažni paket CRC EOF
1 bajt 1 bajt 1 bajt 1 bajt 2 bajta 1 bajt 2bajta 2bajta 2bajta 2bajta 2bajta 2bajta 2bajta 1 bajt
Nevažno od tipa formata paketa, nomenklatura i funkcija je ista i data u tabeli 10.2.
BOF (Beginning of frame) početak frejma, paketaSensor ID identifikacija Shimmer modulaTip podatka nevažan i ostavljen za čuvanje integriteta i razvoj formata paketaBroj frejma obilježavanje frejma, inkrementalno od 0, resetuje se prelazom sa 255 na 0Vremensko obilježavanje u kojem trenutku je poslat frejm od početka rada modulaDužina podatka koliko paketa informacija je poslatoPodaci podaci u brojčanom obliku int16 veličine razdvojeni na dva in8 segmentaACC 1 podaci sa ADCaccelerometra 1ACC 2 podaci sa ADCaccelerometra 2ACC 3 podaci sa ADCaccelerometra 3EKG 1 podaci sa EKG1 ADCEKG 2 podaci sa EKG2 ADCLažni paket nevažan i ostavljen za čuvanje integriteta i razvoj formata paketaCRC provera ispravnosti paketaEOF (End of frame) kraj frejma paketa
Tabela 10.2 Opis paketa unutar frejma komunikacije Shimmer modula
11. Predložena rješenja
11.1 Pravilno povezivanje i pozicioniranje Shimmer modula
Za pravilno interpretiranje veoma je važno podesiti, konfigurisati i postaviti Shimmer modul. Shimmer modul se puni TinyOS RTOS sistemom, koji prikuplja i prosleđuje informacije sa A/D konvertora. Sama lokacija modula na tijelu čovjeka data je slikom 11.1.
53

Bežični monitoring kretanja i biosignala
Slika 11.1 Pravilno postavljanje Shimmer modula.
Pravilne pozicije elektroda EKG nalazime se u dva slučaja. To su pozicije R L N i R1 L1 N1, sa napomenom da je pozicija R L N bolja za monitoring ali ima duže vodove elektroda, dok R1 L1 N1 ima kraće vodove ali lošiji posmatrani signal.Pozicije Shimmer modula za monitoring kretanja date su na slici 11.3. Pojedinačne pozicije modula daju motoriku i kretanje samo jednog dijela tijela odnosno njegove lokacije. Takođe, moguće je postaviti više modula na različitim djelovima tijela i prikupljati i obrađivati informacije sa njih.
54

Bežični monitoring kretanja i biosignala
11.2 Riješenje korišćenjem Biomobius-a
Biomobius platforma je nativno softversko okruženje Shimmer modula. Ona je slobodna za korišćenje i distribuciju, omogućava brz razvoj sofisticiranih riješenja i tehnologija u biomedicinskom monitoringu. Kreirana je sa ciljem da omogući da centralizovana platforma bude nezavisna od hardverske realizacije i veoma je pogodna za Shimmer modul. Softverski elementi koje Biomobius olakšava i podržava su:
Brz razvoj i kreiranje grafičkog okruženja Obrada biosignala u realnom vremenu Podrška za različite module, brz razvoj i implementacija za nove Jednostavan korisnički aspekt Smanjeno vrijeme redizajna korišćenjem blokova operacija
11.2.1 Monitoring kretanja
U nastavku rada je opisano korišćenje Biomobius platforme u razvoju softvera za obradu primljenih informacija i kreiranje grafičkog okruženja za prikaz tih informacija. Na slici 11.2 prikazan je blok dijagram putanje koja se mora ispoštovati u cilju pravilnog razvoja.
Slika 11.2 Blok dijagram putanje razvoja u Bliomobius platformi
Blokovi
U odnosu na sliku 11.2 novi blokovi neće biti razvijani, već će se koristiti postojeći: Shimmer blok - opisuje i konfiguriše Shimmer modul BangGenerator - generalizuje se kao dugme ali glavna namjena mu je da kreira neku akciju Deley - tajmer koji se startuje, odbrojava i pokreće novu akciju poslije određenog vremena Input Selector - biranje jednog od N datih ulaza ConstantGenerator - na svom izlazu daje određenu konstantu FastDataBufferMatrixInput - prima i smješta infromacije u određeni buffer MatrixGetItem - uzima informacije iz određene lokacije Sclargraph - prikazuje informacije u obliku table Matrixdisplayblock - prikazuje informacije u obliku table
55
Razvoj blokova
aplikacije
Postojeći blok
Novi blok
Razvoj u grafičkom okruženju(Slaganje blokova) EyasWeb
PATCHRazvoj grafičkog korisničkog okruženja
Gotov produkt

Bežični monitoring kretanja i biosignala
Razvoj u grafičkom okruženju (slaganje blokova)
Eyesweb je dio Biomobiusa čije se okruženje koristi za razvoj softvera na principu pozicioniranja, konfigurisanja i povezivanja funkcijskih blokova u određenom cilju. Konačni produkt ovakvog rada se naziva PATCH. On predstavlja funkcionalni softver bez vizuelne interpretacije koja se naknadno rješava u Biomobius Gui Dizajneru i tada predstavlja gotov produkt. Na slici 11.3 su predstavljeni glavni elementi Eyasweb korisničkog okruženja i oni su:
Block List - lista svih postojećih blokovao Library view - grupiše blokove na nivou međusobne povezanostio Catalog view - grupiše blokove na nivou sistemskih resursa
Properties - osobine i konfiguracija izabranog bloka Working Space - radna površina gdje se postavljaju i pozicioniraju blokovi
Slika 11.3 Prikaz Eyasweb softvera
Rad sa bilo kojim funkcijskim blokom, nezavisno od primjene, uvjek je isti i moraju se pratiti sledeći koraci:
Pronalazak željenog bloka u BLOCK listi Njegovo prevlačenje na radnu površinu Kreiranje konekcija sa postojećim blokovima Konfiguracija odabranog bloka u segmentu Properties Simulacija aplikacije u cilju provjere funkcionalnosti
56

Bežični monitoring kretanja i biosignala
Demonstracija u Eyasweb i Biomobius GUI Dizajner aplikaciji obuhvata prihvatanje podataka sa accelerometara i njihovo prikazivanje.
Korišćenje Shimmer modula u Eyasweb-u zasniva se na tri segmenta: Kontrola Shimmer modulaa - kako da se startuje i zaustavi prikupljanje podataka sa Shimmer
modula. Prihvatanje podataka sa accelerometara - kako da se prihvate i interpretiraju podaci sa
accelerometra Očitavanje statusa Shimmer modula - kako da se prihvate i interpretiraju statusne poruke
Shimmer modula Grafički prikaz informacija - Prikazivanje dobijenih informacija
11.2.1.1 Kontrola Shimmer modula
Prvi korak u kontroli Shimmer modula je pronalaženje Shimmer bloka unutar BLOCK liste, njegovo pozicioniranje na radnoj površini i konfiguracija parametara (sl.11.4).
Slika 11.4 Rad u Eyasweb-u Shimmer blok
Shimmer blok unutar BLOCK liste u Catalog view-u se nalazi na lokaciji: BIOMOBIUSHardvareIO > Biomobius > Hardvare > Shimmer
Prvo se vrši prevlačenje i pozicioniranje odabranog bloka na radnu površinu. Krog konfiguraciju izabranog bloka unutar properties segmenta vrši se unošenje pravilnog serijskog porta u "Serial port" segmentu. Štrikiranjem se postiže kontrola nad: povezivanjem bloka (Connect), započinjanjem prosleđivanja podataka (Start), zaustavljanjem prosleđivanja podataka(Stop) i prekidanjem komunikacije (Disconnect).
57

Bežični monitoring kretanja i biosignala
Sljedeći korak je postavljanje dugmadi za inicijalizaciju kontrola (sl 11.5)
Slika 11.5 Rad u Eyasweb-u Bang generator blok
Bang generator blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: Gui Objects > BangGenerator
Vrši se prevlačenje i pozicioniranje odabranog bloka na radnu površinu. Unutar properties liste vrši se promijena imena, respektivno u odnosu kontrolu kojase želi vršiti njime. Ova operacija se izvršava četiri puta za kontrole: "Connect", "Start", "Stop i "Disconnect". Za dugmad "Start" i "Disconnect" dodatno štrikira BangGenerator opcija. Ova opcija daje mogućnost eksternog pokretanja nekom od kontrola i kreira novi ulazni pin nad tim dugmadima. Nakon postavljanja i konfigurisanja, vrši se povezivanje i to respektivno kao na slici 11.5. Povezivanje se vrši biranjem nekog od izlaznih pinova dugmadi i prevlačenjem na odgovarajući ulazni pin Shimmer bloka.
58

Bežični monitoring kretanja i biosignala
U sljedećem koraku se uvodi Delay blok (slika 11.6).
Slika 11.6 Rad u Eyasweb-u Delay blok
Delay blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: Kernel > FlowAndControlStructures > Delay
Kao i u predhognim koracima vrši se prevlačenje i pozicioniranje na radnu površinu. Ova operacija se izvršava dva puta. Osobina ovoga bloka je, da kada dobije signal inicijalizacije na ulaznom pinu, poslije zadatog vremena generiše signal inicijalizacije na svome izlaznom pinu. Vrijeme kašnjenjaod jedne sekunde se podešava unutar properties liste i to na "Delay" segmentu. Ova dva bloka povezuju individualno Connect-Start blok kao i Stop-Disconnect blok. Njihovi ulazi se vežu na izlazne pinove Connect i Stop blokova a izlazni pinovi na Bang generator ulazne pinove Start i Disconnect blokova respektivno. Razlog uvođenja Delay blokova je u tome da se automatizuje pristup i prihvatanje podataka sa Shimmer modula. Ako ne bi postojali ovi blokovi, svaka od komandi bi se morala izvršavati pojedinačno, i to redosledom: Connect, Start, Stop i Dissconect. Njihovim uvođenjem, pokretanjem Connect komande, automatski poslije jedne sekunde vrši se pokretanje komande za primanje podataka. Takođe se i sa komandom Stop, poslije jedne sekunde, pokreće komanda za prekidanje veze. Sada postoje dvije komande i to: Connect-Start i Stop-Disconnet.
59

Bežični monitoring kretanja i biosignala
11.2.1.2 Prihvatanje podataka sa accelerometara
Shimmer blok sadrži 3 accelerometra koji su predstavljeni pinovima unutar Shimmer bloka. Pošto se informacije dobijaju u realnom vremenu bira se jedan koji će biti prikazan. Blok komanda za propuštanje samo jednog od N ulaznih pinova je Input selector (sl. 11.7).
Slika 11.7 Rad u Eyasweb-u Input selector blok
Input selector blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: Kernel > FlowAndControlStructures > Input selector
Vrši se prevlačenje i pozicioniranje na radnu površinu. Povezivanje se vrši kao što je prikazano na slici 11.7. Svaki od povezanih pinova redosledom odozgo na dolje ima status signala ACC1, ACC2, ACC3, I, II i III. Broj ulaznih pinova se definiše properties segmentom "#inputs", a segmentom "Active input" bira se jedan koji se prosljeđuje na startu. Da bi se mogao izmijeniti signal koji se posmatra, uvodi se Constant generator blok koji vrši kontrolu kanala koji se propušta na Input selector-u (sl 11.8).
Slika 11.8 Rad u Eyasweb-u Constant generator blok
Constant generator blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: Kernel > Math > Scalar > Generator > Constant generatorProperties opcijom "Show syncin" podešenom na "true" vrši se dodavanjem novog Bang generatora koji inicijalizuje promjenu kanala koji se proslijeđuje.
60

Bežični monitoring kretanja i biosignala
Različite matematičke i logičke operacije zahtijevaju višestruke odbirke tokom vremena i u tom cilju postavlja se FastDataBufferMatrixInput blok koji prima i čuva u sebi zadatu količinu podataka (sl 11.9).
Slika 11.9 Rad u Eyasweb-u FastDataBufferMatrixInput blok
FastDataBufferMatrixInput blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: BioMOBIUSBase > Biomobius > Base> FastDataBufferMatrixInput
Konfigurišemo "BufferSize" na 500 semplova i povezujemo njegov ulaz sa izlazom Input selector-a.
11.2.1.3 Očitavanje statusa Shimmer modula
Čitanje podatka o trenutnom statusu Shimmer modula dobijamo sa trinaestog pina Shimmer bloka. Informaciju o statusu predstavlja broj i to: nula-nije povezan, jedinica- povezan, dvojka-prenosi podatke i trojka-loša baterija. Princip povezivanja i dobijanja informacije imamo na slici 11.10.
Slika 11.10 Rad u Eyasweb-u prikaz statusa Shimmer modula
61
Bežični monitoring kretanja i biosignala
Povezujemo sa pina trinaest Shimmer bloka na ulaz Constant generatora i podešavamo ga da se kontrolišu ulazne vrijednosti, opcija "Input value". Sa njegovog izlaza priključujemo TextSelect blok o podešavmo stringove prema numeričkoj vrijednosti ulaza. Izlaz TextSelect blokavežemo za ulaz StringDisplay gdje nam se upisuju tekstualne vrijednosti iz TextSelect bloka.
TextSelect blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: BioMOBIUSBase > Biomobius > Base> TextSelect
StringDisplay blok unutar BLOCK liste u Catalog view se nalazi na lokaciji: System > String > Output > StringDisplay
Konačna šema povezanih blokova data je slikom 11.11.
Slika 11.11 Rad u Eyasweb-u, šema povezanih blokova
Obrada informacija sa Shimmer modula unutar Eyasweb okruženja sa ovime je završena. Sada ostaje riješiti grafičko okruženje i prikaz tih informacija u nekom korisničkom grafičkom okruženju. Ta uloga je dodijeljena Biomobius GUI Dizajneru koji omogućava da se veoma brzo prikažu obrađene informacije .
62

Bežični monitoring kretanja i biosignala
11.2.1.4 Grafički prikaz informacija
Biomobius GUI dizajner je alat sa kojim brzo kreiramo grafičko okruženje koje se veže sa Eyasweb projektom. Procedura se sastoji da prevučemo i pozicioniramo željeni objekat unutar radne povrsine dizajnera i u opcijama izaberemo kakvu on vezu ima sa elementima unutar Eyasweb projekta (sl.11.12).
SLika 11.12 Biomobius GUI dizajner
Podešavanjem "output" i "parametar" segmenta svakog od objekata unutar dizajnera bira se koji od Eyasweb blokova je vezan sa objektima dizajnera. Na ovaj način izrada grafičkog okruženja se vremenski minimizuje do te mjere da izrada ovog primjerskog GUI-ja je trajala samo nekoliko minuta. A finalni projekat u radnom režimu prikupljanja podataka u realnom vremenu izgleda kao na slici 11.13.
Slika 11.13 Prikaz gotovog projekta za monitoring kretanja
63

Bežični monitoring kretanja i biosignala
11.3 Samostalno rješenje korišćenjem Matlaba
Biomobius platforma je ograničena količinom blokova i operacijom koju ti blokovi mogu da izvedu. Svaka nova operacija se mora izvoditi kombinacijom postojećih blokova ili kreiranjem novog, dok se postojeći blokovi ne mogu izmijeniti već samo njihovi parametri. Ovo predstavlja veoma veliku manu platfome. Matlab kao matematički alat predstavlja idealnu platformu za razvoj i primjenu analize signala koji se dobija sa Shimmer modula. U nastavku je prikazana demonstracija jednog wireless monitoringa korišćenjem Matlab i Shimmer modula. BlueTooth SPP profil se koristi kao vid komunikacije. Podjela uloga unutar ove bežične mašine je sljedeća:
Shimmer modul - radi u režimu kolektor - prosleđivanje informacija. Preko svoje tri elektrode dobija signale o EKG-u, a preko inplementiranih accelerometara prima informacije o kretanju. Ove informacije se prosleđuju preko BlueTootha. Oznake na Shimmer modulu date su na slici 11.14.
Slika 11.14 Shimmer modul sa oznakama elektroda
Računar sa Matlabom-radi u režimu primanje-obrada informacija i predstavlja Wireless kontrolni sistem. Na njemu će biti prikazane informacije sa Shimmer modula, EKG i informacije saaccelerometara. EKG signali će se dodatno obrađivati Pan-Tompkins metodom za određivanje QRS segmenta. Izgled matlab programa prikazan je na slici 11.15.
Slika 11.15 Matlab softver za primanje i analizu signala sa Shimmer modula
64

Kolektor-Prosleđivanje informacije
Primanje-Obrada informacije
Primanje paketa komunikacije
Izvlačenje korisne informacije
Provera ispavnosti informacija
Grupisanje informacija po izvoru
Obrada prikupljenih informacija
Prikaz obrađenih podataka
Upravljanje modulom i postavljanje parametara sistemaShimmer modul
Generisanje kanala I EKG signala
Generisanje signala Accelerometra I
Generisanje kanala II EKG signala
Generisanje signala Accelerometra II
Generisanje signala Accelerometra III
Formiranje paketa za
komunikaciju baziranog na
paketu Shimmer modula
Uspostavljanje komunikacije i
slanje informacije bazirane na parametrima
sistema
Slanje signala
Bežični monitoring kretanja i biosignala
11.3.1 Blok dijagram primijenjenog metoda
Razlika između Biomobius platforme i Matlab softvera je da on nema predefinisane blokove Shimmer modula, svaki korak u kreiranju i realizaciji ovakvog sistema mora se inplementirati njegovim ugrađenim komandama, funkcijama i postojećim rutinama. Blok dijagram ovakvog rješenja dat je na slici 11.16.
Slika 11.16 Blok dijagram Wirelles mašine
Primanje - Obrada informacije je realizovana u Matlabu i njen GUI je dat na slici 11.15. Obrada primljenih informacija zavisi od njenog slanja sa Shimmer modula, kao takva ona se mora svaki put poslati u realnom vremenu ako želimo da je obrađujemo. Razvoj softvera i analiza zahtijeva postojanje subjekta i fenomena koji se posmatra. U cilju fokusa na razvoj softvera i metoda obrade informacije, a zanemarivanjem samog izvora informacije, kreirano je i softversko rešenje u Matlabu koje simulira Shimmer modul i njegovu ulogu u ovoj Wireless mašini. Napominje se da simulacija Shimmer modula je apsolutna, što znači da ona: generiše signal koji treba poslati, koristi paket komunikacije Shimmer modula, koristi SPP BlueTooth profil i bežičnu komunikaciju kao i Shimmer modul. Blok dijagram simulacije Shimmer modula je dat na slici 11.17.
Slika 11.17 Simulacija Shimmer modula i njegove uloge
65

Prikazivanje grafičkog korisničkog interfejsa
programa
Inicijalizacija grafičkih segmenata
Inicijalizacija svih promenljivih
Konfiguracija objekta COMPortX
Unošenje zahtjeva za pokretanje analize
Zahtjev postoji?
Ne
Gašenje softvera?
Da
Ne
Da
Pravilno dekodovanje paketa i prepoznavanje
korisne informacije
Smeštanje EKG i ACC podataka unutar
promenljivih
Osvježavanje i iscrtavanje grafika za
prikazivanje obrađenih podataka EKG i ACC
Unošenje novog zahtjeva
Da
Primanje paketa poruke sa Shimmer
modula preko COMPortX bazirano
na event principu
Obrada EKG podataka Pan-Tompkins
metodom
Obrada ACC podataka za grafičko prikazivanje
Zahtjev postoji?
Ne
POČETAK
Kreiranje objekta COMPortX
COM Port=X
Inicijalizacija pravilna?
Ispiši poruku
KRAJ
Izlazna poruka
Brisanje objekta COMPortX
Ne
Da
Bežični monitoring kretanja i biosignala
11.3.2 Algoritam softwera za analizu u Matlabu
Ovo poglavlje će se baviti analizom algoritma softvera realizovanog u Matlabu i svakog koraka unutar njega koji je od veće važnosti ili koji posjeduje određene uslove i parametre koji se moraju ispuniti u cilju pravilnog funkcionisanja. Algoritam je dat slikom 11.18.
Slika 11.18 Algoritam softvera za analizu u Matlabu
11.3.2.1 COM PortX
U zavisnosti od uparivanja i kreiranja virtuelnog serijskog porta važno je pravilno ga numerisati. Paketi informacija koji se primaju preko istog nemaju definisan terminator već su predstavljeni kao nizovi binarnih uint8 brojeva čiji frame zapocinje brojem 192 i označava BOF a završava sa brojem 193 i označava EOF. Zbog ovkvog načina komunikacije konfiguracija ovog porta mora biti sledeća:
Način komunikacije mora biti u obliku niza, šalju se i primaju uint8 tipovi podataka a komunikacija je bazirana na matlab komandi za upis ili čitanje binarnih informacija na serijskom portu (fwrite, fread).
Način kreiranja eventa se vrši pomoću detekcije da se na ulaznom bufferu serijskog porta pojavio određeni broj bajtova.
Zapis svih informacija unutar komunikacije je little-endian odnosno lsb bitovi se zapisuju prvi.
66

Bežični monitoring kretanja i biosignala
Važni djelovi koda unutar softvera Matlaba prateći predhodnu listu su sledeći:
1. Pravilna inicijalizacija COM port-a. COMM_P=serial('COM6','BaudRate',115200,'InputBufferSize',8096,'OutputBufferSize',8096);
2. Kreiranje eventa baziranog na broju prispjelih bajtova i definisanje event funkcije. COMM_P.BytesAvailableFcnMode = 'byte'; COMM_P.BytesAvailableFcnCount = X; %X je numerička oznaka broja bajtova COMM_P.BytesAvailableFcn = 'event-funkcija';
3. Čitanje i pisanje sa COM port-a. podaci = fread(COMM_P, X ,'uint8'); %čitanje X bajtova sa COM port-a prikazanih kao uint8. fwrite(COMM_P, podaci(i) ,'uint8'); %upisivanje i-tog bajta niza podaci na COM portu.
Napomena vezana za little-endian se odnosi na primljene podatke odnosno na zapis u frejmu komunikacije. Unutar frejma svi paketi predstavljaju određenu informaciju, pošto mikrokotroler radi sa veličinama od 16 bita a komunikacija se obavlja veličinom uint8, tada se mora 16-bitna informacija razdvojiti na 2 uint8 podatka. Podaci koji se razdvajaju su ACC1, ACC2, ACC3,EKGI,EKGII i CRC tako da ako nam je primer infromacije 0xA1B2 tada se prvo, prateći little-endian zapis, prosleđuje 0xB2 pa tek 0xA1.
11.3.2.2 Inicijalizacija svih promenljivih
Zbog lakšeg prosleđivanja objekata i podataka unutar funkcija Matlaba kreirana je data struktura koja sadrži sve promenljive i objekte. Tu strukturu zapisujemo unutar UserData elementa strukture objekta COM porta. Sa prosleđivanjem objekta COM porta nekoj funkciji proslijedili smo sve promenljive i pristupe grafičkim segmentima softvera tako da su eliminisane globalne promenljive i međusobno preotimanje upisa u podacima. Primer koda:
........................ data.comm_p=comm_p; data.comm_ps= comm_ps; ........................ data.handle.hAxes = hAxes; data.handle.htoggle = htoggle; ........................ set(comm_p, 'UserData', data); ........................
11.3.2.3 Pravilno dekodovanje paketa i prepoznavanje korisne informacije
Frejm komunikacije je već prikazan Tipom 2 u tabeli 10.2. Sadrži unutar sebe 22 bajta od kojih: 1. bajt je BOF sa vrijednosti 192, 2. bajt sa brojčanom vrijednošću koja identifikuje Shimmer modul, 7. bajt sa brojem 12 odnosno brojem podataka koje je poslao i zadnji odnosno 22. bajt je EOF sa vrijednosti 193. Unutar frejma moguće je imati svaku od ovih vrijednosti ali ne i na specifičnim pozicijama. Ovi bajtovi su uvjek isti i na istim pozicijama unutar frejma i koriste se kao maska pri pravilnom dekodovanju frejma. Podešavanja primljenih informacija unutar COM porta se mora bazirati na množenju nekog broja X sa vrijednošću 22 da bi se dobilo X poslatih frejmova pri čitanju informacija sa serijskog porta poslatih od strane Shimmer modula. Na slici 11.18 je prikazano pravilno dekodovanje frejma.
67

Bežični monitoring kretanja i biosignala
Slika 11.19 Dekodovanje frejma Shimmer modula
11.3.2.4 Pan-Tompkinsov metod za analizu QRS kompleksaOvaj metod se koristi pri analizi u realnom vremenu, bazira se na analizi brzine pada signala, amplitude i širine QRS kompleksa. Algoritam koristi niz filtera matematičke operacije i njihove osobine da bi pronašao željene tačke. Procedura i njeni efekti su dati na slici 11.20.
Slika 11.20 koraci u Pan-Tompkinsovoj metodi QRS detekcije
Normalizacija signala
Normalizacija signala je matematička operacija, izvršava se kada matematičke ili fizičke veličine o informaciji nijesu važne, već njihov oblik i referentni međusobni odnosi. Sa normalizacijom eliminiše se i DC komponenta tako da se graf dovodi na segment minimalne amplitude -1 i maksimalne amplitude od 1.
Slika 11.21 Normalizacija signala
LP Filtar
68
Normalizacija
LP Filtar
HP Filtar
Filtar derivacije
Kvadriranje
Integracija
Detekcija pozicije maksimuma
QRS obelježavanje

Bežični monitoring kretanja i biosignala
Standardni filtar propusnika niskih učestanosti, najčešće se uzima do 60 Hz. Posljedice pri primjeni se vide na slici 11.22.
Slika 11.22 LP filtar
HP FiltarStandardni filtar propusnika visokih učestanosti, najčešće se uzima od 5 Hz. Posljedice pri primjeni se vide na slici 11.23.
Slika 11.23 HP filtar
Filtar derivacije
69

Bežični monitoring kretanja i biosignala
Njegova osobina je da prepozna najveći pad i rast funkcije u određenom opsegu. Najčešće se uzima da je centralna frekvencija oko 30 Hz. Time se eliminišu niske frekvencije i oblici P i T talasa. Posljedice pri primjeni se vide na slici 11.24.
Slika 11.24 Filtar derivacije
KvadriranjeKvadriranjem sa parnim stepenom se eliminišu sve negativne vrijednosti i stvara numjerička primjetna razlika između lokalnih maksimuma. Ono može biti primitivni način za pronalaženje maksimuma QRS segmenta odnosno R tačke. Posljedice pri primjeni se vide na slici 11.25.
Slika 11.25 KvadriranjeIntegracija
70

Bežični monitoring kretanja i biosignala
Integracija sa prozorom širine od N odbiraka konačno proizvodi signal koji uključuje informaciju o padu i širini QRS kompleksa. Širina N odbiraka mora obuhvatiti QRS kompleks. Tada daje oblast u originalnom signalu od N odbiraka koja sigurno sadrži ove tačke. Određivanjem lokalnog minimuma i maksimuma u toj oblasti od N odbiraka dobijamo Q R S tačke. Posljedice i detekcija pri primjeni se vide na slici 11.26.
Slika 11.26 Integracija i oblast detekcije
71

Bežični monitoring kretanja i biosignala
Zaključak
Bežični monitoring je uticao i unaprijedio postojeće metode, analize i uređaje za posmatranje opšteg zdravlja čoveka. Ovakvi metodi su u većini slučajeva: neinvazivni, laki za rukovanje i posjeduju veoma kratko vrijeme od trenutka prihvatanja podataka do njihove obrade i dobijanja pouzdane informacije nevažnog karaktera. Način na koji se izvršava monitoring i prosleđivanje podataka postaje sve više je stvar izbora. Postoji ogromna količina metoda, platformi i načina obrade podataka da je veoma teško baviti se razvojem u nekoj oblasti ako se fokusira na samo jednu od njih. Takođe je važno poznavati i sa pravilnog aspekta posmatrati oblast u kojoj se djeluje zbog velike količine slobodnih informacija i njihovih interpretacija. Dovoljno je dobiti signal pravilno ga obraditi i prikazati a njegova interpretacija se prepušta kvalifikovanom osoblju.
Ovaj rad sadrži sledeće cjeline:
U prvoj glavi su dati fenomeni i njihove osobine, osnovne primjene i načine kako se vrši monitoring nad njima. Osnovne informacije kako treba da izgledaju signali koje pratimo i kakav uticaj mogu imati interpretacije takvog monitoringa.
U drugoj glavi je izdvojen i prikazan BlueTooth kao jedan od mogućih načina komunikacije i njegove opšte primjene.
U trećoj glavi fokus se stavlja na opštu specifikaciju i profile BlueTootha, sa posebnim osvrtom na profil serijskog porta.
U četvrtoj glavi imamo prikaz kako se BlueTooth uređaji implementiraju na mikrokontrolerske platforme i kako se adaptiraju postojeće u cilju dodavanja novih osobina i mogućnosti.
U petoj glavi se govori o mrežnim topologijama BlueTooth baziranih uređaja i međusobnim interkonekcijama.
U šestoj glavi se govori o primjeni BlueTooth uređaja u medicini i koja je njihova budućnost. U sedmoj glavi vršimo upoređivanje BlueTooth uređaja sa ZigBee uređajima, odnosno
najsličnijom tehnologijom njemu koja trenutno postoji. U osmoj glavi se uvodi model Wireless mašine i prikazuju njene osobine. Nevezano od načina
realizacije modela to su opšte karakteristike koje se moraju ispratiti. U devetoj glavi uvodimo RTOS sisteme razlog korišćenja i njihove glavne osobine. U desetoj glavi uvodimo Shimmer modul, koji objedinjava sve date modele, tehnologije i
primjenu opisanu u radu unutar svog dizajna. Daju se njegove opšte karakteristike, način rada, konfiguracija i komunikacija.
U jedanaestoj glavi daje se realizacija monitoringa. Način obrade iformacija i prikazivanja istih.
72

Bežični monitoring kretanja i biosignala
LITERATURA:
[1] Dr. Ibrahim A. Ghaleb, «BlueTooth:Connect Without Cables», Electrical Engineering Department Faculty of Engineering Alexandria University, June 2002
[2] David Kammer,Gordon McNutt, Brian Senese, «The short range interconnect solution» Published by Syngress, 2002
[3] Mats Andersson, «Industrial Use of BlueTooth» CTO connectBlue AB, Sweden, Web2006
[4] BlueGiga's medical offering. «BlueGiga» BlueGiga Web Ressource
[5] Tony Parisi, «Implementing BlueTooth for Industrial and Medical applications», NXP Press, Jun 21, 2007
[6] Global Foundaries, «BlueTooth RFCOMM with TS 07.10 Serial Port Emulation», Global Foundaries , May 2002.
[7] Kent Lennartsson, «BlueTooth in service and production applications», KVASER AB
[8] Halt Eren, «Wireless Sensors and instruments» Published by CRC Press, 2006
[9] D. M. Akbar Hussain, A. A. Tabassam, M. Zafarullah Khan, Shaiq A. Haq*, Zaki Ahmed, «BlueTooth: A Case Study for Industrial Applications», Published by Springer, 2008
[10] Mats Andersson, «Using BlueTooth in an Industrial Environment, Reliability and Robustness», connectBlue AB Global Found.
[11] Tam Vu Ngoc, Raj Jain, «Medical Applications of Wireless Networks» Free web ressource
[12] Xu Qiu1, Xu Aijun, Huang Zhen, Li Chengwei, «Application of BlueTooth in the Medical Field HOLTER Applied by the BlueTooth Technology» Free web ressource
[13] William E. Saltzstein, «BlueTooth: The Future of Wireless Medical Technology?» Article.
[14] Catalin Bujdei, Stefan Dan, Adrian Pelcz, «WIRELESS SENSOR NETWORKS USED FOR PATIENT MONITORING» University of Brasov BULGARIA 2006.
[15] Noel Baisa, «Designing wireless interfaces for patient monitoring equipment» www.rfdesign.com, April 2005
[16] Global Foundaries, «BlueTooth Based Telemetry/ PLC System» Global Foundaries
[17] Wiggers Diagram http://en.wikipedia.org/wiki/Wiggers_diagram
[18] QRS Detection http://farukuysal.net/QRSDetection.aspx
[19] IEEE Press R.M.Rangayyan «Pan-Tompkins-algorithm-algorithm-to-detect-QRS-complex-in-ECG»
[20] IEEE Press JIAPU PAN AND WILLIS J. TOMPKINS «A Real-Time QRS Detection Algorithm»
73

Bežični monitoring kretanja i biosignala
[21] The ECG leads http://www.statmedicaleducation.com/ecgleads.html
[22] 12-Leads ECG System http://www.bem.fi/book/15/15.htm
[23] Electrocardiography http://en.wikipedia.org/wiki/Electrocardiography
[24] Electrocardiogram http://www.emedicinehealth.com/electrocardiogram_ecg/article_em.htm
[25] Electromyography http://en.wikipedia.org/wiki/Electromyography
[26] Assessment&Rehabilitation http://win-health.com/muscle-assessment_muscle-rehabilitation.html
[27] Jordi Llosa, Ignasi Vilajosana, Xavier Vilajosana, Nacho Navarro, Emma Surinach and Joan Manuel Marques «REMOTE, a Wireless Sensor Network Based System to Monitor Rowing Performance »
[28] Novel Products http://novel.de/old/ger/productinfo/systems-pliance-hand.htm
[29] Bioinstrumentation System WB-2 http://www.takanishi.mech.waseda.ac.jp/top/research/wb/wb-2/index.htm
[30] Real-Time Operating system http://en.wikipedia.org/wiki/Real-time_operating_system
[31] Real-Time Operating system (RTOS) http://rtos.com/downloads/articles_and_white_papers-1/
[32] RTOS http://www.quadros.com/resources/white-papers/main
[33] M.J Deghani, A.R. Shashabinia Ali Akbar Safavi «Implementation of wireles data transmiton based on BlueTooth tehnology for biosignal monitoring»
[34] Department of Computer Engineering, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia «Warning and monitoring medical system using sensor networks»
[35] Quadros Systems «An Introduction to Real-time Operating Systems»
[36] Shimmer User Manual http://www.shimmer-research.com/
[37] Shimmer Packet Rev1b http://www.shimmer-research.com/
[39] Matlab research center http://www.mathworks.com
74