Embed Size (px)
Citation preview
Michele Campiti
Analisi Matematicaelementi principali della teoria
x
y
f
g
0
1
a.a. 2011-2012
Per i corsi di “Analisi Matematica I & II ” della Facolta di Ingegneria, Universita del
Salento

In copertina: Grafico delle funzioni f(x) := exp(x) e g(x) := sinx
Prefazione
Il presente testo contiene gli elementi principali della teoria dei corsi di Ana-lisi Matematica I e II ed e indirizzato principalmente agli studenti dei Corsidi Laurea in Scienze ed Ingegneria. In diversi capitoli e stato privilegiato l’o-biettivo della sintesi degli argomenti trattati, e diverse parti della teoria sonostate introdotte in modo da basare l’esposizione su un numero abbastanzacontenuto di definizioni di base. Sono stati spesso anche utilizzati strumentiintuitivi, soprattutto per cio che riguarda gli argomenti introduttivi quali lateoria degli insiemi, gli insiemi numerici e la topologia degli spazi euclidei.Tuttavia il presente testo non e concepito come un mero testo di calcolo;gli elementi della teoria sono stati esposti in modo da favorire la formazionescientifica degli studenti e da incentivare l’interesse verso un’analisi criticadei problemi posti. L’acquisizione di nuove nozioni e basata sull’utilizzo diquelle gia apprese in modo da favorire il progressivo approfondimento deirisultati esposti.
Sono ovviamente graditi suggerimenti e segnalazioni di errori da far per-venire preferibilmente per e-mail all’indirizzo: [email protected].
Michele Campiti


Indice
I Funzioni di una variabile reale 1
1 Preliminari 5
1.1 Cenni di calcolo proposizionale . . . . . . . . . . . . . . . . . 5
1.1.1 Connettivi logici . . . . . . . . . . . . . . . . . . . . . 5
1.1.2 Quantificatori . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.3 Notazioni insiemistiche . . . . . . . . . . . . . . . . . . 11
1.1.4 Prodotto cartesiano e relazioni tra elementi di dueinsiemi . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2 Relazioni funzionali e funzioni . . . . . . . . . . . . . . . . . . 17
1.2.1 Immagini dirette e immagini reciproche . . . . . . . . 19
1.2.2 Funzioni iniettive, suriettive e biiettive . . . . . . . . . 21
1.2.3 Funzioni composte e funzioni inverse . . . . . . . . . . 23
2 Cenni sugli insiemi numerici 29
2.1 L’insieme dei numeri naturali e dei numeri interi . . . . . . . 29
2.1.1 Principio di induzione . . . . . . . . . . . . . . . . . . 31
2.1.2 Formula del binomio di Newton . . . . . . . . . . . . . 32
2.1.3 Cenni di calcolo combinatorio . . . . . . . . . . . . . . 34
2.2 L’insieme dei numeri razionali e reali . . . . . . . . . . . . . . 36
2.2.1 Insiemi numerabili . . . . . . . . . . . . . . . . . . . . 39
2.3 Proprieta dei sottoinsiemi di R . . . . . . . . . . . . . . . . . 41
2.3.1 Intervalli di R . . . . . . . . . . . . . . . . . . . . . . . 41
2.3.2 Valore assoluto e distanza in R . . . . . . . . . . . . . 42
2.3.3 Rappresentazione geometrica di Rn, n ≤ 3 . . . . . . . 44
2.3.4 Sottoinsiemi limitati ed estremi . . . . . . . . . . . . . 47
2.3.5 Intorni e punti di accumulazione . . . . . . . . . . . . 50
2.3.6 La retta ampliata dei numeri reali . . . . . . . . . . . 50
iv Indice
3 Numeri complessi e polinomi 533.1 Proprieta generali dei numeri complessi . . . . . . . . . . . . 533.2 Richiami di trigonometria e coordinate polari . . . . . . . . . 57
3.2.1 Coordinate polari . . . . . . . . . . . . . . . . . . . . . 623.3 Forma trigonometrica dei numeri complessi . . . . . . . . . . 643.4 Forma esponenziale dei numeri complessi . . . . . . . . . . . 673.5 Polinomi ed equazioni algebriche . . . . . . . . . . . . . . . . 68
3.5.1 Polinomi e relative radici . . . . . . . . . . . . . . . . 683.5.2 Polinomi a coefficienti reali . . . . . . . . . . . . . . . 73
4 Funzioni reali 774.1 Operazioni con le funzioni reali . . . . . . . . . . . . . . . . . 774.2 Estremi di funzioni reali . . . . . . . . . . . . . . . . . . . . . 814.3 Proprieta di monotonia . . . . . . . . . . . . . . . . . . . . . 834.4 Proprieta di simmetria e periodicita . . . . . . . . . . . . . . 874.5 Successioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.5.1 Numero di Nepero . . . . . . . . . . . . . . . . . . . . 894.6 Funzioni elementari . . . . . . . . . . . . . . . . . . . . . . . . 91
4.6.1 Funzioni potenza ad esponente intero positivo . . . . . 914.6.2 Funzioni radice . . . . . . . . . . . . . . . . . . . . . . 924.6.3 Funzione potenza ad esponente intero negativo . . . . 944.6.4 Funzioni potenza ad esponente razionale e reale . . . . 964.6.5 Funzioni esponenziali e logaritmiche . . . . . . . . . . 974.6.6 Funzioni trigonometriche . . . . . . . . . . . . . . . . 1014.6.7 Funzioni trigonometriche inverse . . . . . . . . . . . . 103
5 Equazioni e disequazioni 1095.1 Equazioni e disequazioni razionali intere . . . . . . . . . . . . 1095.2 Equazioni e disequazioni razionali fratte . . . . . . . . . . . . 1125.3 Sistemi di equazioni e disequazioni . . . . . . . . . . . . . . . 1145.4 Equazioni e disequazioni irrazionali . . . . . . . . . . . . . . . 1165.5 Equazioni e disequazioni con valore assoluto . . . . . . . . . . 1195.6 Metodo grafico . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6 Limiti delle funzioni reali 1276.1 Definizione generale di limite . . . . . . . . . . . . . . . . . . 1276.2 Prime proprieta dei limiti . . . . . . . . . . . . . . . . . . . . 1296.3 Limiti destri e sinistri . . . . . . . . . . . . . . . . . . . . . . 1326.4 Teoremi di confronto . . . . . . . . . . . . . . . . . . . . . . . 1346.5 Operazioni sui limiti . . . . . . . . . . . . . . . . . . . . . . . 1356.6 Limiti delle funzioni monotone . . . . . . . . . . . . . . . . . 1416.7 Limiti delle funzioni elementari . . . . . . . . . . . . . . . . . 143
Indice v
6.7.1 Funzioni potenza ad esponente intero positivo . . . . . 1446.7.2 Funzioni radice . . . . . . . . . . . . . . . . . . . . . . 1446.7.3 Funzioni potenza ad esponente intero negativo . . . . 1456.7.4 Funzioni potenza ad esponente reale . . . . . . . . . . 1456.7.5 Funzioni esponenziali . . . . . . . . . . . . . . . . . . . 1456.7.6 Funzioni logaritmo . . . . . . . . . . . . . . . . . . . . 1466.7.7 Funzioni trigonometriche . . . . . . . . . . . . . . . . 1466.7.8 Funzioni trigonometriche inverse . . . . . . . . . . . . 147
6.8 Limiti di polinomi e funzioni razionali . . . . . . . . . . . . . 1476.9 Limiti notevoli . . . . . . . . . . . . . . . . . . . . . . . . . . 1496.10 Infinitesimi ed infiniti . . . . . . . . . . . . . . . . . . . . . . 154
6.10.1 Operazioni con infinitesimi ed infiniti . . . . . . . . . . 157
7 Successioni e serie numeriche 1637.1 Limiti di successioni . . . . . . . . . . . . . . . . . . . . . . . 163
7.1.1 Successioni estratte . . . . . . . . . . . . . . . . . . . . 1717.1.2 Massimo e minimo limite . . . . . . . . . . . . . . . . 1727.1.3 Criterio di convergenza di Cauchy . . . . . . . . . . . 1767.1.4 Massimo e minimo limite per le funzioni . . . . . . . . 177
7.2 Serie numeriche . . . . . . . . . . . . . . . . . . . . . . . . . . 1797.2.1 Definizioni e proprieta preliminari . . . . . . . . . . . 1807.2.2 Serie a termini positivi . . . . . . . . . . . . . . . . . . 1837.2.3 Serie alternanti . . . . . . . . . . . . . . . . . . . . . . 1907.2.4 Proprieta algebriche . . . . . . . . . . . . . . . . . . . 192
8 Funzioni continue 1978.1 Definizioni e proprieta preliminari . . . . . . . . . . . . . . . 1978.2 Funzioni continue su intervalli chiusi e limitati . . . . . . . . 2018.3 Continuita delle funzioni monotone . . . . . . . . . . . . . . . 2058.4 Funzioni uniformemente continue . . . . . . . . . . . . . . . . 207
9 Calcolo differenziale 2119.1 Funzioni derivabili . . . . . . . . . . . . . . . . . . . . . . . . 211
9.1.1 Definizioni ed interpretazione geometrica . . . . . . . 2119.1.2 Regole di derivazione . . . . . . . . . . . . . . . . . . . 2179.1.3 Derivate delle funzioni elementari . . . . . . . . . . . . 221
9.2 Teoremi di Rolle, Cauchy e Lagrange . . . . . . . . . . . . . . 2279.3 Applicazioni al calcolo dei limiti . . . . . . . . . . . . . . . . . 230
9.3.1 Teoremi di L’Hopital . . . . . . . . . . . . . . . . . . . 2309.3.2 Formula di Taylor . . . . . . . . . . . . . . . . . . . . 2379.3.3 Simboli di Landau e applicazioni della formula di Tay-
lor al calcolo dei limiti . . . . . . . . . . . . . . . . . . 244
vi Indice
9.4 Applicazioni allo studio del grafico delle funzioni reali . . . . 2469.4.1 Monotonia e massimi e minimi relativi ed assoluti . . 2469.4.2 Convessita, concavita e flessi . . . . . . . . . . . . . . 2549.4.3 Asintoti . . . . . . . . . . . . . . . . . . . . . . . . . . 2629.4.4 Studio del grafico di una funzione reale . . . . . . . . 265
10 Calcolo integrale 27110.1 L’integrale secondo Riemann . . . . . . . . . . . . . . . . . . 271
10.1.1 Suddivisioni di un intervallo . . . . . . . . . . . . . . . 27110.1.2 Integrabilita delle funzioni limitate . . . . . . . . . . . 27210.1.3 Interpretazione geometrica e proprieta dell’integrale
esteso . . . . . . . . . . . . . . . . . . . . . . . . . . . 27810.1.4 Primitive ed integrale indefinito . . . . . . . . . . . . . 28110.1.5 Integrali indefiniti immediati . . . . . . . . . . . . . . 28610.1.6 Prime regole di integrazione . . . . . . . . . . . . . . . 288
10.2 Integrazione delle funzioni razionali . . . . . . . . . . . . . . . 29010.2.1 Caso m = 1 . . . . . . . . . . . . . . . . . . . . . . . . 29110.2.2 Caso m = 2 . . . . . . . . . . . . . . . . . . . . . . . . 29110.2.3 Caso m > 2 . . . . . . . . . . . . . . . . . . . . . . . . 292
10.3 Integrali impropri . . . . . . . . . . . . . . . . . . . . . . . . . 29410.3.1 Integrali impropri di funzioni non limitate . . . . . . . 29410.3.2 Integrali impropri su intervalli non limitati . . . . . . 301
II Equazioni differenziali e funzioni di piu variabilireali 309
11 Successioni e serie di funzioni 31311.1 Convergenza puntuale ed uniforme . . . . . . . . . . . . . . . 31311.2 Proprieta del limite di una successione di funzioni . . . . . . . 31511.3 Serie di funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . 31911.4 Serie di potenze . . . . . . . . . . . . . . . . . . . . . . . . . . 32411.5 Serie ottenute per derivazione ed integrazione . . . . . . . . . 32911.6 Serie di Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . 330
11.6.1 Funzione esponenziale . . . . . . . . . . . . . . . . . . 33211.6.2 Funzione logaritmo . . . . . . . . . . . . . . . . . . . . 33311.6.3 Funzioni seno e coseno . . . . . . . . . . . . . . . . . . 33311.6.4 Funzione arcotangente . . . . . . . . . . . . . . . . . . 33411.6.5 La serie binomiale . . . . . . . . . . . . . . . . . . . . 33411.6.6 La funzione arcoseno . . . . . . . . . . . . . . . . . . . 337
11.7 Serie di Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . 337
Indice vii
12 Calcolo differenziale in piu variabili 34312.1 Cenni sulla struttura metrica di Rn . . . . . . . . . . . . . . . 343
12.1.1 Prodotti scalari e norme . . . . . . . . . . . . . . . . . 34312.1.2 Sfere ed insiemi aperti e chiusi . . . . . . . . . . . . . 34912.1.3 Intervalli, rette e direzioni di Rn . . . . . . . . . . . . 351
12.2 Funzioni di piu variabili . . . . . . . . . . . . . . . . . . . . . 35312.3 Derivate direzionali e parziali e differenziabilita . . . . . . . . 356
12.3.1 Funzioni lineari . . . . . . . . . . . . . . . . . . . . . . 35712.3.2 Derivate direzionali e parziali . . . . . . . . . . . . . . 35812.3.3 Differenziabilita . . . . . . . . . . . . . . . . . . . . . . 36012.3.4 Derivate successive e formula di Taylor . . . . . . . . . 36812.3.5 Differenziabilita delle funzioni composte . . . . . . . . 372
12.4 Punti di massimo e minimo relativo . . . . . . . . . . . . . . 37412.5 Massimo e minimo assoluto . . . . . . . . . . . . . . . . . . . 37812.6 Massimi e minimi vincolati . . . . . . . . . . . . . . . . . . . 380
13 L’integrale di Riemann in Rn 38313.1 Cenni sulla teoria della misura di Peano-Jordan in Rn . . . . 38313.2 Cenni sull’integrale di Riemann in Rn . . . . . . . . . . . . . 388
13.2.1 Integrazione su domini normali . . . . . . . . . . . . . 39113.2.2 Cambiamento di variabile negli integrali multipli . . . 395
14 Curve, campi vettoriali e superfici 40114.1 Curve regolari e lunghezza . . . . . . . . . . . . . . . . . . . . 40114.2 Integrali curvilinei e campi vettoriali conservativi . . . . . . . 409
14.2.1 Integrali curvilinei . . . . . . . . . . . . . . . . . . . . 40914.2.2 Integrali curvilinei di un campo vettoriale . . . . . . . 41114.2.3 Campi vettoriali conservativi . . . . . . . . . . . . . . 412
14.3 Superfici ed integrali superficiali . . . . . . . . . . . . . . . . 41614.4 Il teorema della divergenza e la formula di Stokes . . . . . . . 418
15 Equazioni differenziali ordinarie 41915.1 Introduzione e problema di Cauchy . . . . . . . . . . . . . . . 41915.2 Unicita della soluzione del problema di Cauchy . . . . . . . . 42615.3 Esistenza della soluzione del problema di Cauchy . . . . . . . 43015.4 Equazioni differenziali lineari . . . . . . . . . . . . . . . . . . 432
15.4.1 Equazioni differenziali lineari del primo ordine . . . . 43615.4.2 Equazioni differenziali lineari di ordine n a coefficienti
costanti . . . . . . . . . . . . . . . . . . . . . . . . . . 437
Bibliografia 441


Elenco delle figure
1.1 Rappresentazione grafica del prodotto cartesiano di due insiemi. 131.2 Rappresentazione grafica di una generica relazione tra ele-
menti di due insiemi. . . . . . . . . . . . . . . . . . . . . . . . 141.3 Rappresentazione grafica di una relazione riflessiva e di una
non riflessiva. . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.4 Rappresentazione grafica di una relazione simmetrica e di
una non simmetrica. . . . . . . . . . . . . . . . . . . . . . . . 151.5 Rappresentazione grafica di una relazione antisimmetrica e
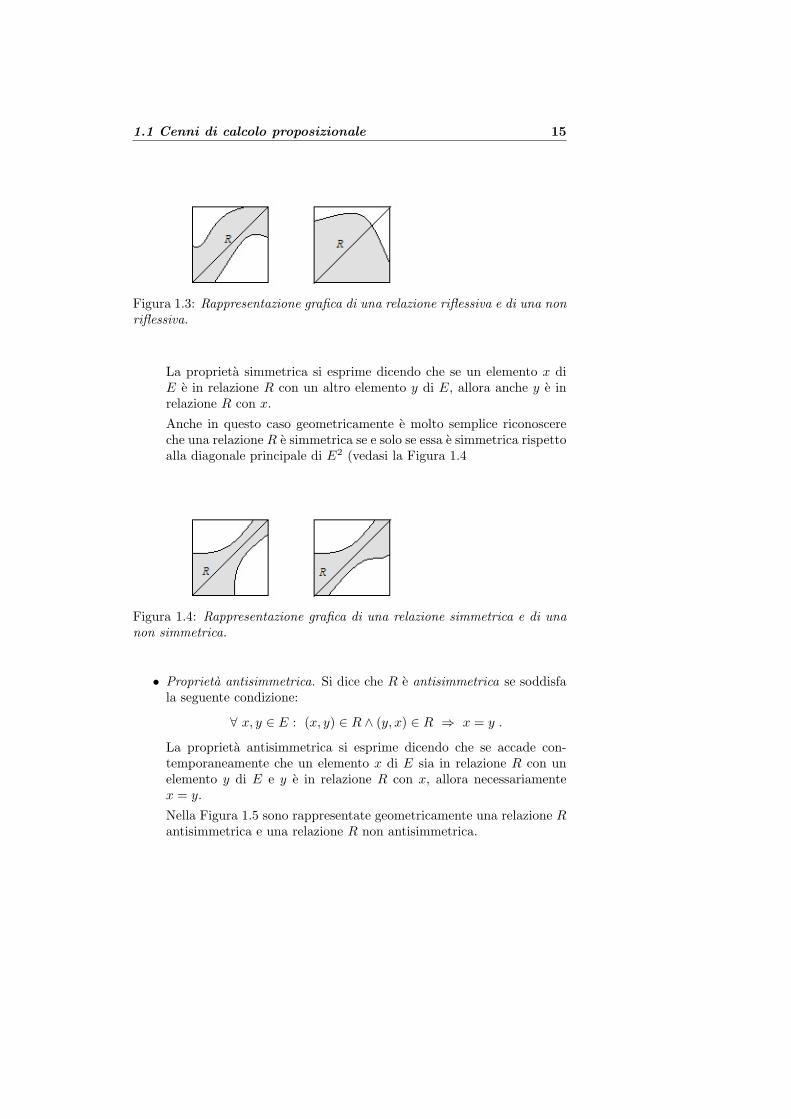
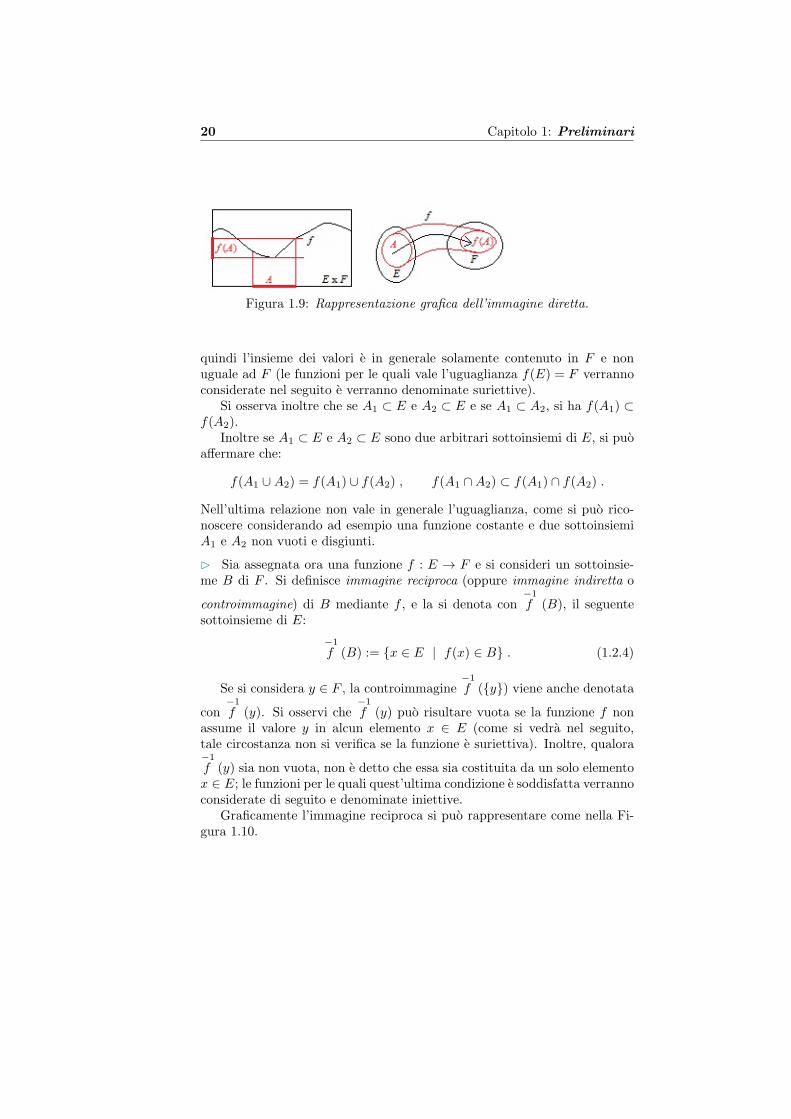
di una non antisimmetrica. . . . . . . . . . . . . . . . . . . . 161.6 Rappresentazione grafica di una relazione funzionale. . . . . . 181.7 Esempi di relazioni non funzionali. . . . . . . . . . . . . . . . 181.8 Rappresentazione grafica di una funzione. . . . . . . . . . . . 191.9 Rappresentazione grafica dell’immagine diretta. . . . . . . . . 201.10 Rappresentazione grafica dell’immagine reciproca. . . . . . . . 211.11 Rappresentazione grafica di una funzione iniettiva e di una
funzione non iniettiva. . . . . . . . . . . . . . . . . . . . . . . 221.12 Rappresentazione grafica di una funzione suriettiva e di una
funzione non suriettiva. . . . . . . . . . . . . . . . . . . . . . 231.13 Rappresentazione grafica di una funzione composta. . . . . . . 24
2.1 Rappresentazione geometrica dei numeri reali. . . . . . . . . . 442.2 Riferimento cartesiano non ortogonale. . . . . . . . . . . . . . 452.3 Riferimento cartesiano ortonormale. . . . . . . . . . . . . . . 462.4 Riferimento cartesiano dello spazio. . . . . . . . . . . . . . . 47
3.1 Circonferenza trigonometrica. . . . . . . . . . . . . . . . . . . 583.2 Interpretazione geometrica della tangente. . . . . . . . . . . . 613.3 Interpretazione geometrica della cotangente. . . . . . . . . . . 623.4 Coordinate polari. . . . . . . . . . . . . . . . . . . . . . . . . 643.5 Radici terze e quinte di un numero complesso. . . . . . . . . . 67

x Elenco delle figure
4.1 Esempio di massimo assoluto e relativo. . . . . . . . . . . . . 834.2 Funzione strettamente crescente (decrescente) in un intervallo. 844.3 Funzione strettamente crescente (decrescente) in un punto. . 864.4 Funzione potenza ad esponente pari (≥ 2). . . . . . . . . . . . 924.5 Funzione potenza ad esponente dispari (≥ 3). . . . . . . . . . 934.6 Funzione radice con indice pari. . . . . . . . . . . . . . . . . . 944.7 Funzione radice con indice dispari. . . . . . . . . . . . . . . . 954.8 Funzione potenza ad esponente intero negativo pari. . . . . . 954.9 Funzione potenza ad esponente intero negativo dispari. . . . . 964.10 Funzione potenza con esponente razionale o reale. . . . . . . . 984.11 Funzione esponenziale. . . . . . . . . . . . . . . . . . . . . . . 994.12 Funzione logaritmo. . . . . . . . . . . . . . . . . . . . . . . . 1014.13 Funzioni seno e coseno. . . . . . . . . . . . . . . . . . . . . . 1024.14 Funzione tangente. . . . . . . . . . . . . . . . . . . . . . . . . 1034.15 Funzione cotangente. . . . . . . . . . . . . . . . . . . . . . . . 1044.16 Funzione arcoseno. . . . . . . . . . . . . . . . . . . . . . . . . 1054.17 Funzione arcocoseno. . . . . . . . . . . . . . . . . . . . . . . . 1064.18 Funzione arcotangente. . . . . . . . . . . . . . . . . . . . . . . 1074.19 Funzione arcocotangente. . . . . . . . . . . . . . . . . . . . . . 108
5.1 Metodo grafico per le disequazioni: Esempio 1 . . . . . . . . . 1235.2 Metodo grafico per le disequazioni: Esempio 2 . . . . . . . . . 1245.3 Metodo grafico per le disequazioni: Esempio 3 . . . . . . . . . 1245.4 Metodo grafico per le disequazioni: Esempio 4 . . . . . . . . . 125
6.1 Limiti di una funzione monotona. . . . . . . . . . . . . . . . . 1446.2 Limite notevole sinx/x in 0. . . . . . . . . . . . . . . . . . . 151
7.1 Prodotto secondo Cauchy di due serie . . . . . . . . . . . . . 193
8.1 Teorema degli zeri. . . . . . . . . . . . . . . . . . . . . . . . . 2038.2 Approssimazione delle soluzioni con il teorema degli zeri. . . . 204
9.1 Interpretazione geometrica della derivata. . . . . . . . . . . . 2159.2 Teorema di Rolle. . . . . . . . . . . . . . . . . . . . . . . . . . 2289.3 Teorema di Lagrange. . . . . . . . . . . . . . . . . . . . . . . 2309.4 Polinomi di Taylor. . . . . . . . . . . . . . . . . . . . . . . . . 2399.5 Funzione convessa o concava in un punto e punti di flesso. . . 2579.6 Asintoto orizzontale e verticale. . . . . . . . . . . . . . . . . . 2639.7 Grafico della funzione. . . . . . . . . . . . . . . . . . . . . . . 2689.8 Grafico della funzione. . . . . . . . . . . . . . . . . . . . . . . 270
10.1 Somma superiore ed inferiore relativa ad una suddivisione. . . 273

Elenco delle figure xi
10.2 Teorema della media integrale. . . . . . . . . . . . . . . . . . 282
12.1 Esempio di insieme connesso ma non convesso. . . . . . . . . 353
13.1 Esempio di insieme misurabile illimitato. . . . . . . . . . . . 38713.2 Dominio di integrazione con trasformazione in coordinate po-
lari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397

Parte I
Funzioni di una variabilereale


Nella prima parte del corso, l’obiettivo principale riguarda lo studio del-le funzioni reali di una variabile reale, attraverso lo studio dei limiti e delcalcolo differenziale ed integrale. Per il raggiungimento di tale obiettivovengono trattati non solo argomenti di carattere preliminare, quali gli insie-mi con particolare riguardo a quelli numerici, le disequazioni e le funzionielementari, ma anche diversi argomenti di carattere complementare, quali inumeri complessi, le successioni e le serie numeriche.

Capitolo 1
Preliminari
1.1 Cenni di calcolo proposizionale
1.1.1 Connettivi logici
Innanzitutto conviene introdurre brevemente alcuni connettivi logici al finedi precisarne il loro significato e soprattutto il loro utilizzo. L’utilizzo delcalcolo proposizionale risulta uno strumento molto utile nei casi in cui bi-sogna operare con enunciati che coinvolgono diversi connettivi contempora-neamente in quanto le regole introdotte per la manipolazione degli enunciatisono di carattere generale.
Si precisa innanzitutto che il termine enunciato o proprieta e da inten-dere come un qualsiasi frase di senso compiuto. Un enunciato puo esserevero o falso e, piu in generale, puo essere anche indecidibile (cioe ne verone falso) o contraddittorio (cioe vero e falso contemporaneamente); avrannopero interesse per i nostri fini soltanto enunciati veri oppure enunciati falsi.Di solito gli enunciati vengono rappresentati con lettere corsive maiuscole;ad esempio: A, B, C, . . . , P, Q, . . . Facendo uso dei connettivi logici sipossono introdurre nuovi enunciati partendo da enunciati assegnati.
Uno dei piu semplici connettivi logici e quello di negazione; assegnatoun enunciato A, si conviene che il simbolo ⌉A (da leggersi “non A”) denotila negazione dell’enunciato A; talvolta vengono usati anche i simboli ¬A e∼ A. La negazione ⌉A dell’enunciato A risulta un enunciato vero se A e unenunciato falso e, viceversa, risulta un enunciato falso se A e un enunciatovero.
Altri connettivi elementari sono quelli di disgiunzione logica e di con-giunzione logica; assegnati gli enunciati A e B i simboli A ∨ B (“A o B”) eA ∧ B (“A e B”) denotano la disgiunzione logica e rispettivamente la con-

6 Capitolo 1: Preliminari
giunzione logica degli enunciati A e B; l’enunciato A ∨ B risulta vero ogniqualvolta e vero almeno uno degli enunciati A e B (si tratta quindi di unadisgiunzione debole, nel senso che A∨B e vero anche se A e B sono entrambiveri), mentre l’enunciato A∧B e vero solo nel caso in cui sono veri entrambigli enunciati A e B.
Introdotto il connettivo negazione “⌉”, gli ulteriori connettivi “∨” e “∧” non risultano
tra loro indipendenti; si puo infatti riconoscere facilmente che il significato dell’enunciato
“A ∧ B” coincide con quello del seguente enunciato ⌉((⌉A) ∨ (⌉B)).
Un altro connettivo utile e quello di implicazione logica; se A e B so-no enunciati, la scrittura A ⇒ B (“A implica B”) e da intendersi comeun’abbreviazione dell’enunciato “B ∨ (⌉A)”. Dunque “A ⇒ B” e vero sel’enunciato A e falso oppure se, supposto vero l’enunciato A, risulta veroanche l’enunciato B; conseguentemente, “A⇒ B” risulta falso solo nel casoin cui l’enunciato A e vero e l’enunciato B e falso.
Un ultimo connettivo logico e quello di equivalenza; se A e B sono enun-ciati, la scrittura A⇔ B (“A equivale a B”) e da intendersi come un’abbre-viazione di “(A⇒ B) ∧ (B ⇒ A)”. L’equivalenza “A⇔ B” e un enunciatovero se e solo se gli enunciati A e B sono entrambi veri oppure entrambifalsi. Ogni enunciato puo essere sostituito, in ogni espressione logica, da unenunciato ad esso equivalente.
Si riassumono ora alcune proprieta notevoli dei connettivi precedenti.
Se A, B e C sono enunciati, allora:
1. ⌉(⌉A)⇔ A.
2. A ∨ B ⇔ B ∨A , A ∧ B ⇔ B ∧A .
3. A⇔ A ∨A , A⇔ A ∧A .
4. A⇒ A ∨ B , A ∧ B ⇒ A .
5. (A ∨ B) ∨ C ⇔ A ∨ (B ∨ C) , (A ∧ B) ∧ C ⇔ A ∧ (B ∧ C) .
6. (A ∨ B) ∧ C ⇔ (A ∧ C) ∨ (B ∧ C) , (A ∧ B) ∨ C ⇔ (A ∨ C) ∧ (B ∨ C) .
7. A⇔ A (proprieta riflessiva dell’equivalenza).
8. Se A⇔ B allora B ⇔ A (proprieta simmetrica dell’equivalenza).
9. Se A ⇔ B e B ⇔ C allora A ⇔ C (proprieta transitiva dell’equi-valenza).
10. Se A⇒ B e B ⇒ C allora A⇒ C (proprieta transitiva dell’impli-cazione).

1.1 Cenni di calcolo proposizionale 7
11. (A⇒ B)⇔ (⌉B ⇒⌉A).
Conviene inoltre tener presente la seguente regola di deduzione: “Se A eun enunciato vero e se e vera l’implicazione A⇒ B, allora anche l’enunciatoB e vero”.
In alcuni casi, per stabilire la verita o la falsita di un enunciato, sipossono utilizzare le seguenti tavole di verita, nelle quali si conviene didenotare con 1 o 0 i casi in cui un enunciato sia vero o rispettivamentefalso. Nel caso in cui un enunciato sia composto mediante diversi enunciati,bisogna considerare tutte le possibili combinazioni che si possono presentare.
Ad esempio, le tavole di verita degli enunciati A ∨ B e A ∧ B sono dateda
A B A ∨ B1 1 11 0 10 1 10 0 0
A B A ∧ B1 1 11 0 00 1 00 0 0
e racchiudono il fatto che la disgiunzione logica e falsa (assume il valore 0)solo quando entrambi gli enunciati sono falsi, mentre la congiunzione logicae vera (assume il valore 1) solo quando entrambi gli enunciati sono veri.
Le tavole di verita relative agli altri connettivi logici sono le seguenti
A ⌉A1 00 1
A B A⇒ B1 1 11 0 00 1 10 0 1
A B A⇔ B1 1 11 0 00 1 00 0 1
.
Esempi ed esercizi
1. Considerati gli enunciati:
A = “Antonio vive a Roma e a Milano”,
B = “Domani andro allo stadio o al cinema”,
C = “Un foglio di quaderno e macchiato”,
scrivere gli enunciati: ⌉A, ⌉B, ⌉C, A ∨ B, A ∨ (⌉C), (⌉B) ∧ C
(Esempio: ⌉A = “Antonio o non vive a Roma o non vive a Milano”).

8 Capitolo 1: Preliminari
2. Scrivere la negazione dei seguenti enunciati:
A = “Tutti i gatti hanno tre zampe”,
B = “Il mio gatto ha tre zampe”,
C = “Esiste un gatto con tre zampe”.
3. Dire se le seguenti implicazioni sono vere:
1 + 1 = 2⇒ “La logica e sempre corretta”,
1 + 1 = 2⇒ “La logica e sempre corretta”,
1 + 1 = 2⇒ “La logica non e sempre corretta”,
1 + 1 = 2⇒ “La logica non e sempre corretta”,
1 + 1 = 2⇒ “La logica talvolta e corretta”,
1 + 1 = 2⇒ “La logica talvolta e corretta”,
4. Scrivere le tavole di verita degli enunciati:
(A⇒ B) ∨ (⌉A); ,
(A⇒ B) ∧A ,
(A∨⌉C)⇔ B ,
(⌉B) ∨ C ⇒ A ∧ B
(ad esempio, si scrive la tavola di verita dell’ultimo enunciato:
A B C ⌉B (⌉B) ∨ C A ∧ B (⌉B) ∨ C ⇒ A ∧ B1 1 1 0 1 1 11 1 0 0 0 1 11 0 1 1 1 0 01 0 0 1 1 0 00 1 1 0 1 1 10 1 0 0 0 1 10 0 1 1 1 0 00 0 0 1 1 0 0
).
Dalla precedente tavola di verita si deduce anche che l’enunciato con-siderato e equivalente al solo enunciato B, in quanto ne assume glistessi valori di verita. Le tavole di verita costituiscono pertanto ancheun utile strumento per semplificare un enunciato complesso assegnato.

1.1 Cenni di calcolo proposizionale 9
1.1.2 Quantificatori
Nel seguito si denoteranno con lettere maiuscole gli insiemi e con lettereminuscole gli elementi di un insieme (la distinzione tra oggetti ed insiemisi riferisce al contesto considerato e non e una distinzione assoluta). Perindicare che un oggetto x e un elemento (rispettivamente, non e un elemento)di un insieme E, si scrive x ∈ E (“x appartiene ad E” oppure “x e elementodi E”) (rispettivamente, x /∈ E (“x non appartiene ad E” oppure “x non eelemento di E”)).
Tra i simboli logici di uso frequente vi sono i quantificatori, definiti comesegue:
∀ Quantificatore universale “per ogni”. Per esprimere la circostanza incui una proprieta P (assegnata per ogni elemento x di un insieme E)sia sempre verificata, si scrive
∀ x ∈ E : P(x)
(si legge “per ogni x in E si ha P(x))”. Il simbolo “:” ha la funzionedi abbreviazione linguistica e si legge “si ha che” oppure “risulta che”.
∃ Quantificatore esistenziale “esiste”. Per esprimere la circostanza incui una proprieta P (assegnata per ogni elemento x di un insieme E)sia verificata per almeno un elemento, si scrive
∃ x ∈ E t.c. P(x)
(si legge “esiste x in E tale che P(x))”. Il simbolo “t.c.” ha la funzionedi abbreviazione linguistica e si legge “tale che”. In molti casi vieneutilizzato anche il simbolo ∋′ come abbreviazione di tale che. Nel casoin cui esista esattamente un unico elemento di x ∈ E per cui P(x) siavera si scrive ∃|x ∈ E t.c. P(x) (si legge “esiste un unico x in E taleche P(x))”.
L’uso di tali simboli e da intendersi nel modo seguente. Sia E un insiemee si supponga di poter attribuire a ciascun elemento x ∈ E una proprietaP(x), vera o falsa (ad esempio, E potrebbe denotare l’insieme delle paroledi un vocabolario e, per ogni x ∈ E, P(x)=“la parola x e formata da piu didieci lettere”).
Allora la scrittura ∃ x ∈ E : P(x) significa “esiste un elemento x diE che verifica la proprieta P(x)” (nell’esempio “esiste una parola con piudi dieci lettere”), mentre la scrittura ∀ x ∈ E : P(x) significa che “ognielemento x di E verifica la proprieta P(x)” (nell’esempio, “ogni parola eformata da piu di dieci lettere”).

10 Capitolo 1: Preliminari
Si noti che le affermazioni precedenti non sono l’una la negazione del-l’altra.
La negazione di ∃ x ∈ E : P(x) e infatti “∀ x ∈ E : P(x) e falsa”,cioe “∀ x ∈ E : ⌉P(x)”, mentre la negazione di ∀ x ∈ E : P(x) e“∃ x ∈ E : P(x) sia falsa”, cioe “∃ x ∈ E : ⌉P(x)”.
In alcuni casi oltre all’esistenza di un elemento che verifica una certaproprieta, si vuole affermare anche la sua unicita. E utile pertanto intro-durre il simbolo ∃| che si utilizza nell’espressione ∃| x ∈ E : P(x) peraffermare che “esiste uno ed un solo elemento x in E tale che la proprietaP(x) sia vera”.
Si riconosce facilmente la validita delle seguenti proprieta, che chiari-scono come si comportano i quantificatori in presenza di altri connettivilogici.
Si intendono fissati un insieme E e le proprieta P(x) e Q(x) definite perogni x ∈ E.
1. ⌉(∀ x ∈ E : P(x)) ⇔ ∃ x ∈ E : ⌉P(x)
⌉(∃ x ∈ E : P(x)) ⇔ ∀ x ∈ E : ⌉P(x) ;
ad esempio, negare che tutti gli italiani abbiano una o piu automobili,significa affermare che esiste un italiano che non ha alcuna automobile,mentre negare che esista un italiano che ha una o piu automobili,significa affermare che tutti gli italiani non hanno un’automobile.
2. (∃ x ∈ E : P(x)∨Q(x)) ⇔ (∃ x ∈ E : P(x)) ∨ (∃ x ∈ E : Q(x))
3. (∀ x ∈ E : P(x)∧Q(x)) ⇔ (∀ x ∈ E : P(x)) ∧ (∀ x ∈ E : Q(x))
4. (∃ x ∈ E : P(x) ∧ Q(x)) ⇒ (∃ x ∈ E : P(x)) ∧ (∃ x ∈ E : Q(x))
5. (∀ x ∈ E : P(x)) ∨ (∀ x ∈ E : Q(x)) ⇒ (∀ x ∈ E : P(x) ∨ Q(x))
Si osservi che nelle ultime due proprieta non vale l’equivalenza; infattise, ad esempio, E denota l’insieme 0, 1, 2 e se, per ogni x ∈ E, si poneP(x) = “x ≤ 1” e Q(x) =“x = 2”, si vede facilmente che gli enunciati(∃ x ∈ E : P(x)) e (∃ x ∈ E : Q(x)) sono entrambi veri (e quindi e verala loro congiunzione logica) mentre l’enunciato (∃ x ∈ E : P(x) ∧Q(x)) eevidentemente falso.
Analogamente, se si considerano le proprieta, definite per ogni x ∈ E,P(x) = “x ≤ 1” e Q(x) =“x ≥ 1”; allora l’enunciato “∀ x ∈ E : P(x) ∨Q(x)” e vero, mentre ciascuno degli enunciati “∀ x ∈ E : P(x)′′e“∀ x ∈E : Q(x)” e falso (e quindi e falsa la loro disgiunzione logica).
La prima proprieta, apparentemente banale, consente di eseguire cor-rettamente la negazione anche di enunciati complessi, in cui l’intuizione

1.1 Cenni di calcolo proposizionale 11
potrebbe invece incontrare difficolta. Infatti, e sufficiente osservare che lanegazione di un quantificatore universale si ottiene considerando il quanti-ficatore esistenziale seguito dalla negazione, e viceversa, la negazione di unquantificatore esistenziale si ottiene considerando il quantificatore universa-le seguito dalla negazione (cioe ⌉(∀ x ∈ E : . . . ) equivale a ∃ x ∈ E : ⌉(. . . )mentre ⌉(∃ x ∈ E : . . . ) equivale a ∀ x ∈ E : ⌉(. . . )).
Ad esempio, si considerino tre insiemi E, F e G e sia P(x, y, z) unaproprieta che dipende dagli elementi x ∈ E, y ∈ F e z ∈ G. Allora lanegazione dell’enunciato
∀ x ∈ E : ∃ y ∈ F : ∀ z ∈ G : P(x, y, z)
e data da∃ x ∈ E : ∀ y ∈ F : ∃ z ∈ G : ⌉P(x, y, z) .
Esempi ed esercizi
1. Dire se sono veri i seguenti enunciati: “−2 e un numero naturale”, “5e n numero intero”, “−7 e un numero razionale”.
2. Scrivere la negazione dei seguenti enunciati
A = “∀ x ∈ E : ∃ y ∈ E : P(x, y) ,”
B = “∃ x ∈ E : ∀ y ∈ E : P(x, y) ,”
(ad esempio, la negazione dell’enunciato A e data da
∃ x ∈ E : ∀ y ∈ E : ⌉P(x, y) ).
Nelle sezioni seguenti sono raggruppate alcune delle notazioni adoperatenel seguito del testo.
1.1.3 Notazioni insiemistiche
Gli insiemi vengono solitamente rappresentati con lettere maiuscole: E,F, . . .ed i loro elementi con lettere minuscole: x, y, . . . . Un insieme contenentegli oggetti a, b, c, . . . si puo indicare con a, b, c, . . . ; inoltre, se E e uninsieme assegnato e se, per ogni x ∈ E e assegnata anche una proprietaP(x), l’insieme degli elementi di E per cui la proprieta e vera si denota conx ∈ E | P(x).
Se in particolare viene assegnata una proprieta che non e soddisfatta daalcun elemento di E (ad esempio, P(x) =“x non e un elemento di E), siottiene un insieme privo di elementi, che viene denominato insieme vuoto edenotato con ∅. L’insieme vuoto ∅ e caratterizzato dal fatto di non avereelementi.
Inoltre, si assumono le seguenti notazioni:
12 Capitolo 1: Preliminari
∈ Simbolo di appartenenza. La notazione “x ∈ E” afferma che l’oggettox appartiene all’insieme (oppure e elemento di) E). La negazione ditale circostanza si esprime scrivendo “x /∈ E”.
⊂ Simbolo di inclusione. La notazione “E ⊂ F” afferma che l’insieme Ee contenuto nell’insieme (oppure e un sottoinsieme di) F , cioe gli ele-menti di E sono anche elementi di F . La negazione di tale circostanzasi esprime scrivendo “E ⊂ F”.
∩ Simbolo di intersezione. La notazione “E ∩ F” denota l’insieme co-stituito dagli elementi che appartengono sia ad E che ad F . Piu ingenerale, se I e un insieme e per ogni i ∈ I e assegnato un insiemeEi, l’insieme intersezione costituito dagli elementi che appartengono
a tutti gli insiemi Ei viene denotato con⋂
i∈I
Ei. Due insiemi E ed F
si dicono disgiunti se E ∩ F = ∅.
∪ Simbolo di unione. La notazione “E ∪ F” denota l’insieme costituitodagli elementi che appartengono o ad E oppure ad F (cioe ad almenouno dei due insiemi). Inoltre, se per ogni i ∈ I e assegnato un insiemeEi, l’insieme unione costituito dagli elementi che appartengono ad
almeno uno degli insiemi Ei viene denotato con⋃
i∈I
Ei.
" Simbolo di complementare. Se E e un sottoinsieme di F , la notazio-ne “"F (E)” denota l’insieme costituito dagli elementi di F che nonappartengono ad E.
" Simbolo di differenza di insiemi. La notazione “F " E” denota l’in-sieme costituito dagli elementi di F che non appartengono ad E. Siha ovviamente F " E = "F (E ∩ F ).
1.1.4 Prodotto cartesiano e relazioni tra elementi didue insiemi
In questa sezione viene introdotto il prodotto cartesiano di due o piu insiemie inoltre vengono dati alcuni cenni sulle relazioni tra elementi di due insiemi.L’obiettivo principale sara quello di introdurre in maniera precisa il concettodi funzione utilizzando le relazioni cosiddette funzionali. Per completezza,verranno citate anche alcune tra le proprieta principali di una relazione.
Se x ed y sono oggetti distinti, l’insieme x, y viene denominato coppianon ordinata (se x = y, si ottiene l’insieme x ridotto al solo elemento x).Per quanto riguarda l’insieme x, y, non ha alcuna rilevanza l’ordine conil quale compaiono i due elementi x ed y; invece nella coppia ordinata (x, y)

1.1 Cenni di calcolo proposizionale 13
di prima coordinata x e seconda coordinata y l’ordine in cui compaionogli elementi diventa di importanza sostanziale. Precisamente, si puo porre(x, y) = x, x, y per differenziare il ruolo dei due elementi; tuttavia nelseguito si preferira basarsi su una definizione intuitiva nelle dimostrazioni.
Pertanto, si ha (a, b) = (c, d) se e solo se a = c e b = d.In modo del tutto analogo, assegnati tre oggetti x, y e z, si puo definire la
terna ordinata (x, y, z). Nel caso in cui x1, x2, . . . , xn siano n oggetti (n ≥ 2),si definisce con lo stesso metodo la n-pla ordinata di prima coordinata x1,di seconda coordinata x2, . . . , ed n-esima coordinata xn.
Se E ed F sono due insiemi, si puo considerare l’insieme di tutte lecoppie ordinate con prima coordinata in E e seconda coordinata in F . Taleinsieme viene denominato insieme prodotto di E per F e viene denotato conil simbolo E × F ; se E = F , si puo anche scrivere E2 anziche E × E.
Il prodotto cartesiano E ×F puo essere rappresentato geometricamenteindicando gli elementi dell’insieme E su un segmento disposto orizzontal-mente e gli elementi di F su un segmento disposto verticalmente; gli elementidel prodotto (coppie ordinate) sono allora rappresentati come elementi delrettangolo in Figura 1.1.
P(x, y)
x
y
E
F
•
Figura 1.1: Rappresentazione grafica del prodotto cartesiano di due insiemi.
Si osservi che se l’insieme E e formato da n elementi distinti e l’insiemeF e formato da m elementi distinti, allora il prodotto cartesiano E × Fpossiede esattamente n ·m elementi distinti.
In modo analogo si considera il prodotto cartesiano E × F × G di treinsiemi E,F eG; esso e l’insieme delle terne ordinate la cui prima coordinatae un elemento di E, la seconda coordinata e un elemento di F e la terzacoordinata e un elemento di G.
Piu in generale, se E1, E2, . . . , En sono n insiemi (n ≥ 2), si puo definireil prodotto cartesiano E1×E2× · · ·×En come l’insieme delle n-ple ordinate(x1, . . . , xn) tali che x1 ∈ E1, . . . xn ∈ En. Anche in questo caso, se E1 =E2 = · · · = En = E, si utilizza il simbolo En per denotare il prodottoE1 × E2 × · · ·× En.

14 Capitolo 1: Preliminari
Si introduce ora il concetto di relazione tra elementi di due insiemiassegnati. Siano E ed F due insiemi.
Una relazione tra elementi di E ed elementi di F e semplicemente unsottoinsieme del prodotto cartesiano E × F .
Figura 1.2: Rappresentazione grafica di una generica relazione tra elementidi due insiemi.
Poiche in particolare ∅ ⊂ E × F e E × F ⊂ E × F , tra le relazioni traun insieme E ed un insieme F vanno sempre considerate la relazione vuota∅ e la relazione totale E × F .
Il fatto che una coppia (x, y) ∈ E×F appartenga alla relazione R indicache l’elemento x di E e in relazione R con l’elemento y di F . Per denotarequesta circostanza si scrive anche xRy anziche (x, y) ∈ R.
Se in particolare E = F , una relazione R ⊂ E2 viene denominatarelazione su E.
Si osservi che in questo caso, se E viene rappresentato geometricamentecon un segmento, allora il prodotto cartesiano E2 diventa un quadrato.
Le relazioni su un insieme E possono avere particolari proprieta. Perenunciarle, si fissi una relazione R su un insieme E. Allora
• Proprieta riflessiva. Si dice che R e riflessiva se soddisfa la seguentecondizione:
∀ x ∈ E : (x, x) ∈ R .
La proprieta riflessiva si esprime dicendo che ogni elemento di E e inrelazione R con se stesso.
Geometricamente, e molto semplice riconoscere che una relazione R eriflessiva se e solo se essa contiene la diagonale principale di E2 (vedasila Figura 1.3
• Proprieta simmetrica. Si dice che R e simmetrica se soddisfa laseguente condizione:
∀ x, y ∈ E : (x, y) ∈ R ⇒ (y, x) ∈ R .
1.1 Cenni di calcolo proposizionale 15
Figura 1.3: Rappresentazione grafica di una relazione riflessiva e di una nonriflessiva.
La proprieta simmetrica si esprime dicendo che se un elemento x diE e in relazione R con un altro elemento y di E, allora anche y e inrelazione R con x.
Anche in questo caso geometricamente e molto semplice riconoscereche una relazione R e simmetrica se e solo se essa e simmetrica rispettoalla diagonale principale di E2 (vedasi la Figura 1.4
Figura 1.4: Rappresentazione grafica di una relazione simmetrica e di unanon simmetrica.
• Proprieta antisimmetrica. Si dice che R e antisimmetrica se soddisfala seguente condizione:
∀ x, y ∈ E : (x, y) ∈ R ∧ (y, x) ∈ R ⇒ x = y .
La proprieta antisimmetrica si esprime dicendo che se accade con-temporaneamente che un elemento x di E sia in relazione R con unelemento y di E e y e in relazione R con x, allora necessariamentex = y.
Nella Figura 1.5 sono rappresentate geometricamente una relazione Rantisimmetrica e una relazione R non antisimmetrica.

16 Capitolo 1: Preliminari
Figura 1.5: Rappresentazione grafica di una relazione antisimmetrica e diuna non antisimmetrica.
• Proprieta transitiva. Si dice che R e transitiva se soddisfa la seguentecondizione:
∀ x, y, z ∈ E : (x, y) ∈ R ∧ (y, z) ∈ R ⇒ (x, z) ∈ R .
In questo caso si rinuncia ad una rappresentazione geometrica in quan-to non vi e una caratterizzazione elementare come nei precedenticasi.
Le precedenti proprieta consentono di introdurre le seguenti due impor-tanti classi di relazioni su un insieme E:
• Si dice che una relazione R su un insieme E e una relazione d’equiva-lenza su E se essa e riflessiva, simmetrica e transitiva.
• Si dice che una relazione R su un insieme E e una relazione d’ordinesu E se essa e riflessiva, antisimmetrica e transitiva.
Alcuni esempi di relazioni di equivalenza sono:
• Le parole di un vocabolario che cominciano con la stessa lettera. Inquesto caso E e l’insieme delle parole del vocabolario ed R = (x, y) ∈E2 | x e y cominciano con la stessa lettera. Analogamente si possonoconsiderare le parole che terminano con la stessa lettera, che fannorima, che hanno lo stesso numero di lettere e cosı via.
• La classe di appartenenza tra gli abitanti di una citta. In questo casoE e l’insieme degli abitanti della citta ed R = (x, y) ∈ E2 | x e yhanno la stessa eta. Analogamente si possono considerare la cittanatale, l’iscrizione alla stessa scuola e cosı via.
• Sull’insieme N = 0, 1, 2, . . . dei numeri naturali, la relazione R1 =(n,m) ∈ N2 | n e primo con m oppure R2 = (n,m) ∈ N2 | lasomma di n ed m e pari .

1.2 Relazioni funzionali e funzioni 17
mentre i seguenti sono esempi riguardanti alcune relazioni d’ordine:
• I files piu grandi (come dimensioni) tra quelli di un computer. In que-sto caso E e l’insieme dei files presenti nel computer ed R = (x, y) ∈E2 | x ha una dimensione maggiore o uguale a quella di y. Analoga-mente si possono considerare i files piu recenti, quelli modificati piuvolte, ecc.
• L’ordine alfabetico tra le parole di un vocabolario. In questo caso E el’insieme delle parole del vocabolario ed R = (x, y) ∈ E2 | x precedeo coincide con y secondo l’ordine alfabetico.
• Il numero di matricola tra gli studenti universitari. In questo caso Ee l’insieme degli studenti iscritti ad una Universita ed R = (x, y) ∈E2 | Il numero di matricola di x e minore o uguale di quello di y.
• La relazione d’ordine naturale tra i numeri naturali, interi, razionalie reali.
• La relazione di inclusione tra i sottoinsiemi di un assegnato insieme Ee una relazione d’ordine sull’insieme dei sottoinsiemi di E. In questocaso, assegnato un insieme E, si ha R = (A,B) ∈ P(E)2 | A ⊂ B(P(E) denota l’insieme di tutti i sottoinsiemi di E).
1.2 Relazioni funzionali e funzioni
Si considera ora un’ulteriore proprieta delle relazioni che sara alla base delladefinizione di funzione.
Siano E ed F insiemi e sia R ⊂ E × F una relazione tra elementi di Eed elementi di F .
Si dice che R e una relazione funzionale tra elementi di E ed elementidi F se essa verifica la seguente condizione:
∀ x ∈ E ∃ | y ∈ F t.c. (x, y) ∈ R . (1.2.1)
Quindi in una relazione funzionale ogni elemento di E e in relazione conuno ed un solo elemento y di F .
Graficamente questa condizione si puo descrivere affermando che le retteverticali passanti per i punti di E intersecano la relazione in uno ed un solopunto, come si vede nella Figura 1.6.
Nella Figura 1.7 successiva vengono mostrati invece due casi in cui ladefinizione precedente non e verificata.
A questo punto si puo definire in maniera precisa il concetto di funzione.

18 Capitolo 1: Preliminari
Figura 1.6: Rappresentazione grafica di una relazione funzionale.
Figura 1.7: Esempi di relazioni non funzionali.
Siano E ed F insiemi. Si dice funzione da E in F ogni terna ordinata f =(E,F,R) dove R e una relazione funzionale tra elementi di E ed elementidi F .
Intuitivamente assegnare una funzione vuol dire assegnare tre oggetti:un insieme di partenza E (denominato anche insieme di definizione op-pure dominio di f), un insieme di arrivo F e una relazione funzionale Rdenominata grafico della funzione, che rappresenta la ‘corrispondenza’ chead ogni elemento dell’insieme di partenza associa uno ed un solo elementodell’insieme di arrivo.
Viene quindi richiesta agli elementi di E di soddisfare la condizione pre-vista dalla definizione di relazione funzionale e precisamente che ad ognielemento x ∈ E corrisponda uno ed un solo elemento di F . Cio consente didare la seguente definizione.
Il valore che una funzione f assume in un elemento x ∈ E viene denotatocon f(x) e rappresenta l’unico elemento y di F tale che (x, y) ∈ R.
Quindi la relazione funzionale puo essere scritta nel modo seguente:
R = (x, y) ∈ E × F | y = f(x) . (1.2.2)
Da tale descrizione segue che e equivalente assegnare il grafico della

1.2 Relazioni funzionali e funzioni 19
funzione oppure alternativamente assegnare il valore f(x) delle funzione fin ogni punto x ∈ E.
Si osservi che il concetto di funzione non prevede che gli elementi di Fsoddisfino alcuna condizione.
Molto frequentemente si prenderanno in esame proprieta riguardanti unagenerica funzione che ha E come insieme di partenza ed F come insiemedi arrivo. In tali circostanze si rpeferira la notazione f : E → F (oppure
talvolta Ef→ F oppure x 4→ f(x)).
Graficamente, una funzione viene rappresentata con uno dei seguentigrafici:
Figura 1.8: Rappresentazione grafica di una funzione.
1.2.1 Immagini dirette e immagini reciproche
Sia ora f : E → F una funzione di E in F . Se A e un sottoinsieme di E,si denomina immagine diretta di A mediante f , e la si denota con f(A), ilseguente sottoinsieme di F :
f(A) := y ∈ F | ∃ x ∈ A t.c. f(x) = y . (1.2.3)
L’immagine diretta di E mediante f viene denominata semplicementeimmagine di f (oppure insieme dei valori di f) e denotata anche con Im(f).Quindi:
f(E) := y ∈ F | ∃ x ∈ E t.c. f(x) = y .
Graficamente l’immagine diretta si puo rappresentare come nella Figura1.9.
Se si considerano i sottoinsiemi particolari ∅ ed E stesso di E, si puoaffermare quanto segue:
f(∅) = ∅ , f(E) ⊂ F ;
20 Capitolo 1: Preliminari
Figura 1.9: Rappresentazione grafica dell’immagine diretta.
quindi l’insieme dei valori e in generale solamente contenuto in F e nonuguale ad F (le funzioni per le quali vale l’uguaglianza f(E) = F verrannoconsiderate nel seguito e verranno denominate suriettive).
Si osserva inoltre che se A1 ⊂ E e A2 ⊂ E e se A1 ⊂ A2, si ha f(A1) ⊂f(A2).
Inoltre se A1 ⊂ E e A2 ⊂ E sono due arbitrari sottoinsiemi di E, si puoaffermare che:
f(A1 ∪A2) = f(A1) ∪ f(A2) , f(A1 ∩A2) ⊂ f(A1) ∩ f(A2) .
Nell’ultima relazione non vale in generale l’uguaglianza, come si puo rico-noscere considerando ad esempio una funzione costante e due sottoinsiemiA1 e A2 non vuoti e disgiunti.
Sia assegnata ora una funzione f : E → F e si consideri un sottoinsie-me B di F . Si definisce immagine reciproca (oppure immagine indiretta o
controimmagine) di B mediante f , e la si denota con−1f (B), il seguente
sottoinsieme di E:
−1f (B) := x ∈ E | f(x) ∈ B . (1.2.4)
Se si considera y ∈ F , la controimmagine−1f (y) viene anche denotata
con−1f (y). Si osservi che
−1f (y) puo risultare vuota se la funzione f non
assume il valore y in alcun elemento x ∈ E (come si vedra nel seguito,tale circostanza non si verifica se la funzione e suriettiva). Inoltre, qualora−1f (y) sia non vuota, non e detto che essa sia costituita da un solo elementox ∈ E; le funzioni per le quali quest’ultima condizione e soddisfatta verrannoconsiderate di seguito e denominate iniettive.
Graficamente l’immagine reciproca si puo rappresentare come nella Fi-gura 1.10.
1.2 Relazioni funzionali e funzioni 21
Figura 1.10: Rappresentazione grafica dell’immagine reciproca.
Se si considerano i sottoinsiemi particolari ∅ ed F stesso di F , si puoaffermare quanto segue:
−1f (∅) = ∅ ,
−1f (F ) = E .
Quindi in questo caso vale l’uguaglianza come diretta conseguenza delladefinizione di funzione.
Si osserva inoltre che se B1 ⊂ F e B2 ⊂ F e se B1 ⊂ B2, si ha−1f
(B1) ⊂−1f (B2).
Inoltre se B1 ⊂ F e B2 ⊂ F sono due arbitrari sottoinsiemi di F , si puoaffermare che:
−1f (B1 ∪B2) =
−1f (B1)∪
−1f (B2) ,
−1f (B1 ∩B2) =
−1f (B1)∩
−1f (B2) .
1.2.2 Funzioni iniettive, suriettive e biiettive
Siano come al solito E ed F insiemi arbitrari e sia f : E → F una funzioneda E in F .
Si osservi che nella definizione di funzione viene richiesto solo agli ele-menti di E di soddisfare una precisa condizione mentre non vi e alcunaanaloga richiesta sugli elementi di F .
In particolare, considerato un elemento y ∈ F non e detto che esistanodegli elementi x ∈ E tali che y = f(x) ed anche quando questa condizionee soddisfatta non si puo in generale assicurare che tale elemento x (corri-spondente ad y) sia unico. L’unicita e l’esistenza di un “corrispondente”elemento x per ogni elemento y ∈ F e alla base delle seguenti definizioni.
Si dice che f e iniettiva (o anche ingettiva) se verifica la seguente con-dizione:
x, y ∈ E, x = y ⇒ f(x) = f(y) (1.2.5)

22 Capitolo 1: Preliminari
o equivalentemente
x, y ∈ E, f(x) = f(y) ⇒ x = y .
Quindi in questo caso per ogni elemento y ∈ F puo esistere al piu unsolo elemento x ∈ E tale che y = f(x).
Questa condizione si puo esprimere graficamente affermando che ogniretta orizzontale interseca il grafico della funzione in al piu in un punto(vedasi la Figura 1.11).
Figura 1.11: Rappresentazione grafica di una funzione iniettiva e di unafunzione non iniettiva.
Si osservi che nel caso delle funzioni iniettive non e detto che, assegnatoun elemento y ∈ F , esista sempre un elemento x ∈ E tale che y = f(x);infatti la condizione prevista nella definizione di funzione iniettiva prevedesolamente l’unicita di tale elemento nel caso in cui esista.
La seguente definizione invece prende in esame l’esistenza di un “corri-spondente” elemento x ∈ E per ogni elemento y ∈ F .
Sia f : E → F una funzione da E in F . Si dice f e suriettiva (o anchesurgettiva) se essa verifica la seguente condizione
∀ y ∈ F ∃ x ∈ E t.c. f(x) = y . (1.2.6)
Tenendo presente che f(E) e l’insieme di tutti i valori della funzione f ,si riconosce subito che la condizione precedente e equivalente alla seguente:
f(E) = F .
Infatti se f e suriettiva si ha sempre f(E) ⊂ F e quindi bisogna dimostrare l’inclusione
inversa F ⊂ f(E) cioe che ogni elemento di F e un valore della funzione, il che e assicurato
dalla definizione di suriettivita. Viceversa si supponga f(E) = F . Allora ogni elemento
di F appartiene a f(E) e per definizione di f(E) deve esistere un elemento x ∈ E tale
che y = f(x) il che dimostra che f e suriettiva.
1.2 Relazioni funzionali e funzioni 23
Quindi in questo caso per ogni elemento y ∈ F deve esistere almeno unelemento x ∈ E tale che y = f(x).
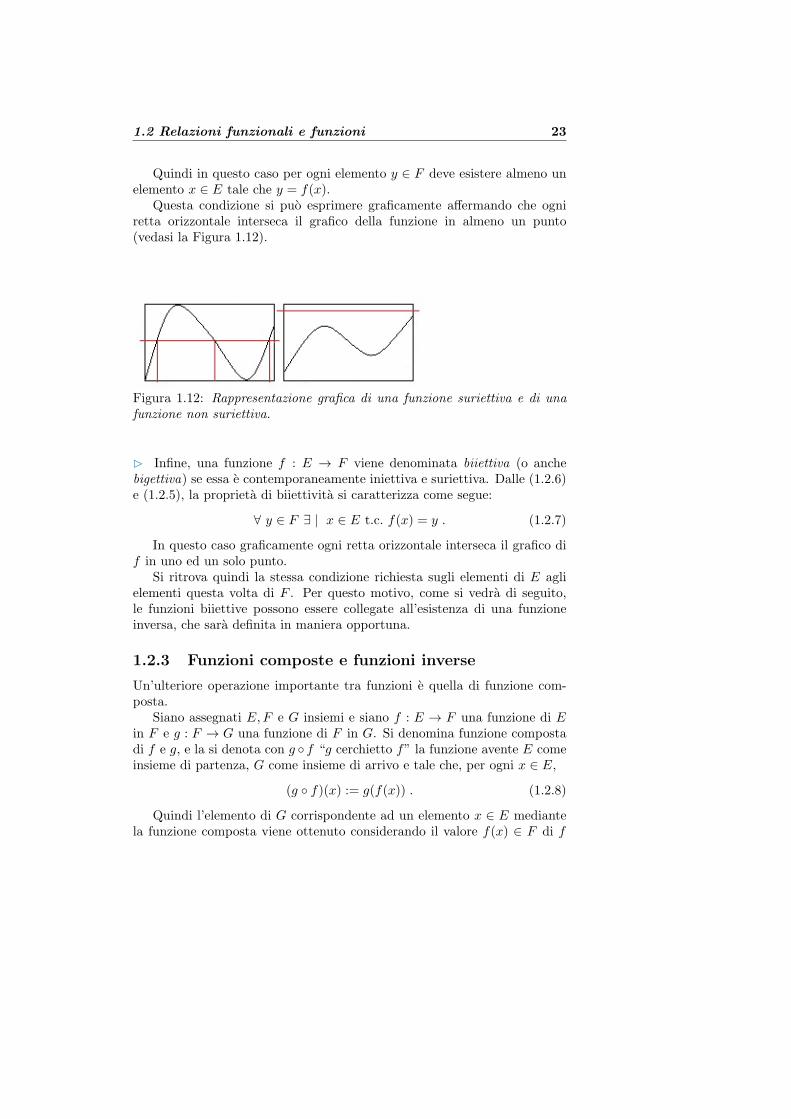
Questa condizione si puo esprimere graficamente affermando che ogniretta orizzontale interseca il grafico della funzione in almeno un punto(vedasi la Figura 1.12).
Figura 1.12: Rappresentazione grafica di una funzione suriettiva e di unafunzione non suriettiva.
Infine, una funzione f : E → F viene denominata biiettiva (o anchebigettiva) se essa e contemporaneamente iniettiva e suriettiva. Dalle (1.2.6)e (1.2.5), la proprieta di biiettivita si caratterizza come segue:
∀ y ∈ F ∃ | x ∈ E t.c. f(x) = y . (1.2.7)
In questo caso graficamente ogni retta orizzontale interseca il grafico dif in uno ed un solo punto.
Si ritrova quindi la stessa condizione richiesta sugli elementi di E aglielementi questa volta di F . Per questo motivo, come si vedra di seguito,le funzioni biiettive possono essere collegate all’esistenza di una funzioneinversa, che sara definita in maniera opportuna.
1.2.3 Funzioni composte e funzioni inverse
Un’ulteriore operazione importante tra funzioni e quella di funzione com-posta.
Siano assegnati E,F e G insiemi e siano f : E → F una funzione di Ein F e g : F → G una funzione di F in G. Si denomina funzione compostadi f e g, e la si denota con g f “g cerchietto f” la funzione avente E comeinsieme di partenza, G come insieme di arrivo e tale che, per ogni x ∈ E,
(g f)(x) := g(f(x)) . (1.2.8)
Quindi l’elemento di G corrispondente ad un elemento x ∈ E mediantela funzione composta viene ottenuto considerando il valore f(x) ∈ F di f

24 Capitolo 1: Preliminari
in x e di questo elemento cosı ottenuto considerandone successivamente ilvalore g(f(x)) mediante g. Intuitivamente, la funzione composta quindi conun unico passaggio fa corrispondere all’elemento x ∈ E l’elemento g(f(x))di G, come mostra la Figura 1.13.
Figura 1.13: Rappresentazione grafica di una funzione composta.
Si osserva che l’operazione di funzione composta e associativa nel sensoche se h : G→ H e un’ulteriore funzione da G in un insieme H, allora
(h g) f = h (g f)
e quindi si puo denotare la funzione cosı ottenuta semplicemente con hgf .Non vale invece una proprieta commutativa per l’operazione di funzione
composta. Infatti, nelle ipotesi in cui si puo considerare la funzione com-posta g f non e detto che si possa considerare f g e anche quando ciodovesse accadere non e detto che valga l’uguaglianza g f = f g.
Si osserva invece che l’operazione di funzione composta ammette unelemento neutro a sinistra e a destra. Per precisare questo, assegnato unqualsiasi insieme E, si consideri la funzione iE : E → E definita ponendo,per ogni x ∈ E,
iE(x) = x .
Allora e facile riconoscere che se f : E → F e un’arbitraria funzione da Ein F si ha
iF f = f , f iE = f .
In realta, la funzione composta puo essere definita in circostanze piugenerali, in cui non e necessario che l’insieme di arrivo di f coincida conl’insieme di partenza di g; e sufficiente, infatti, che l’insieme di arrivo dif sia un sottoinsieme di F affinche continui ad avere senso la definizione(1.2.8).
Pertanto, se f : E → F1 e g : F2 → G sono funzioni tali che f(E) ⊂ F2
si puo considerare la funzione composta che viene denotata ancora con ilsimbolo gf : E → G definita ponendo, per ogni x ∈ E, (gf)(x) = g(f(x)).

1.2 Relazioni funzionali e funzioni 25
Cio sara utile per le funzioni reali che per convenzione avranno semprel’insieme R dei numeri reali come insieme di arrivo. In tal caso sara possibilecomporre tali funzioni con un’ulteriore funzione reale anche se quest’ultimanon e definita in tutto R purche lo sia sull’insieme dei valori della primafunzione.
A questo proposito, si richiamano alcune convenzioni valide per le funzioni reali.
Spesso tali funzioni vengono assegnate precisando solamente il valore y = f(x) assunto
in un generico elemento x senza precisare ne l’insieme di partenza ne quello di arrivo. In
questi casi l’insieme di arrivo e sempre da intendere come tutto R, mentre l’insieme di
partenza e il sottoinsieme piu grande di R per il quale l’espressione f(x) ha significato.
Cio, nel caso di funzioni composte, consente di imporre in maniera diretta la condizione
che la seconda funzione sia definita sui valori della prima funzione. Ad esempio, assegnata
la funzione y =√log x si impone la condizione x ≥ 1 che consente di affermare che
log x ∈ [0,+∞[, insieme in sui e definita la funzione radice.
Risulta utile in pratica saper riconoscere le funzioni dalle quali e com-posta un’assegnata funzione e cio per le funzioni reali si ottiene facilmenteosservando come viene calcolato il valore di una funzione.
Ad esempio, la funzione f(x) = 2sin3√x si ottiene componendo successi-
vamente la funzione radice terza x 4→ y = 3√x, la funzione seno y 4→ z =
sin y e la funzione esponenziale z 4→ 2z di base 2.
Si considera ora il concetto di funzione invertibile da intendersi intui-tivamente come una funzione per la quale esiste un’ulteriore funzione chesvolge un compito inverso rispetto a quello della funzione f , e cioe che ad unvalore assunto in un determinato punto da f fa corrispondere esattamenteil punto nel quale tale valore e stato assunto e tale che f verifichi la stessaproprieta rispetto ai valori assunti da tale funzione.
Precisamente, sia f : E → F una funzione da E in F . Si dice che f einvertibile se esiste un’ulteriore funzione g : F → E tale che
∀ x ∈ E : g(f(x)) = x , ∀ y ∈ F : f(g(y)) = y . (1.2.9)
Si riconosce facilmente che la funzione g verificante la condizione (1.2.9)e unica e viene denominata inversa di f e denotata con il simbolo f−1.
Dalla (1.2.9) segue
∀ x ∈ E : f−1(f(x)) = x , ∀ y ∈ F : f(f−1(y)) = y (1.2.10)
e tenendo presente la definizione di funzione composta
f−1 f = iE , f g = iF .
Da cio segue anche immediatamente che se f e invertibile anche la suainversa f−1 lo e ed ha come inversa la funzione f , cioe (f−1)−1 = f .

26 Capitolo 1: Preliminari
Come si e anticipato in precedenza, la proprieta di biiettivita consente didefinire una funzione che ha le stesse proprieta dell’inversa di una funzioneassegnata. Tale proprieta viene chiarita dal seguente risultato.
Teorema 1.2.1 Siano E ed F insiemi e sia f : E → F una funzione da Ein F . Allora le seguenti proposizioni sono equivalenti:
a) La funzione f e invertibile.
b) La funzione f e biiettiva.
Dimostrazione. Si supponga che f sia invertibile e sia f−1 : F → E la sua inversa.Per verificare che f e iniettiva siano x, y ∈ E tali che f(x) = f(y). Allora si ha anchef−1(f(x)) = f−1(f(y)) e dalle poprieta delle funzioni inverse x = y. Quindi f e iniettiva.
Si dimostra ora che f e suriettiva. Sia y ∈ F e si consideri l’elemento x = f−1(y) ∈ E.Allora, ancora dalle proprieta delle funzioni inverse, f(x) = f(f−1(y)) = y e cio dimostrala proprieta di suriettivita.
Viceversa si supponga ora che f sia biiettiva. Dalla proprieta (1.2.7), si puo definirela funzione g : F → E ponendo, per ogni y ∈ F ,
g(y) = x , dove x e l’unico elemento di E tale che
x ∈ E ,f(x) = y .
Si verifica ora che la funzione g e l’inversa della funzione f . Sia x ∈ E; allora, per come
e definita la funzione g, si ha g(f(x)) = x1 dove x1 e l’unico elemento di E tale che
f(x1) = f(x); dall’unicita di x1 segue x1 = x e quindi g(f(x)) = x. Infine, sia y ∈ F ;
allora g(y) e l’unico elemento di x ∈ E tale che f(x) = y e quindi f(g(y)) = f(x) = y.
Quindi e stata verificata la proprieta (1.2.9) da cui g = f−1. #
Mentre la definizione di funzione invertibile non fornisce indicazionisu come definire l’inversa, tali informazioni sono invece disponibili dalladefinizione di funzione biiettiva, da cui l’importanza del risultato precedente.
Precisamente, dalla dimostrazione del teorema precedente, segue che sef : E → F e invertibile allora la sua inversa e la funzione f−1 : F → Edefinita ponendo, per ogni y ∈ F ,
f−1(y) := x , dove
x ∈ E ,f(x) = y .
(1.2.11)
Bisogna infine tener presente che la proprieta di biiettivita e molto sem-plice da riconoscere geometricamente, come si e visto in precedenza, mentrequella di invertibilita richiede di individuare la funzione g che risulta es-serne l’inversa. Anche per questo motivo il teorema precedente e un utilestrumento per riconoscere facilmente l’invertibilita di una funzione.
In molte circostanze, una funzione verifica una determinata proprieta(per esempio, quella di essere iniettiva oppure biiettiva) non su tutto l’in-sieme di partenza, ma su di un particolare sottoinsieme di esso. In tali

1.2 Relazioni funzionali e funzioni 27
casi, puo risultare utile ricorrere al seguente concetto di restrizione di unafunzione.
Siano assegnati una funzione f : E → F ed un sottoinsieme A di E.Si denomina restrizione di f all’insiemeA, e si denota con f|A, la funzione
da A in F definita ponendo, per ogni x ∈ A,
f|A(x) := f(x) . (1.2.12)
Quindi i valori della restrizione sono gli stessi della funzione; la restrizionef|A tuttavia risulta definita nel sottoinsieme A anziche nell’intero insiemeE.
Il concetto di restrizione risulta utile soprattutto nei casi in cui si vogliaottenere una funzione iniettiva partendo da una funzione arbitraria; in talicasi infatti si considera un particolare sottoinsieme in cui la proprieta diiniettivita e soddisfatta.
D’altra parte, e sempre possibile ottenere una funzione suriettiva par-tendo da una qualsiasi funzione; infatti, se f : E → F e una funzione da Ein F , si puo considerare la ridotta di f , che si denota con f#, ed e definitain E, ha f(E) come insieme di arrivo e inoltre, per ogni x ∈ E,
f#(x) := f(x) . (1.2.13)
Si conclude la presente sezione con qualche precisazione riguardante lefunzioni reali, cioe aventi l’insieme R dei numeri reali come insieme di arrivo.Il fatto di avere tutto R come insieme di arrivo richiede che l’eventualeinversa sia definita in tutto R.
Tuttavia, si puo utilizzare il seguente procedimento per definire un’in-versa anche nel caso di funzioni reali iniettive ma non suriettive (quindi nonaventi tutto R come insieme dei valori).
Sia X un sottoinsieme di R e sia f : X → R una funzione reale iniettiva.Allora la sua ridotta f# : X → f(X) e iniettiva (in quanto i valori dellaridotta sono gli stessi di quelli della funzione) e suriettiva (in quanto leridotte sono sempre suriettive). Quindi f# e invertibile e si puo considerarela funzione inversa (f#)−1 : f(X) → X; si ricorda che, per ogni y ∈ f(X),risulta (f#)−1(y) = x dove x e l’unico elemento di X tale che f(x) =f#(x) = y. A questo punto si definisce la seguente funzione f−1 : f(X)→ Rponendo, per ogni y ∈ f(X),
f−1(y) = x , dove x e l’unico elemento tale che
x ∈ X ,f(x) = y .
La funzione f−1 viene ancora denominata inversa di f e denotata di conse-guenza con il simbolo f−1.

28 Capitolo 1: Preliminari
La funzione f−1 risulta iniettiva in quanto assume gli stessi valori dellafunzione (f#)−1 (che e invertibile e quindi biiettiva) mentre puo non esseresuriettiva (lo e solo se X = R) in quanto i suoi valori appartengono sempreall’insieme X.
In questo modo si e definita quindi l’inversa di una funzione iniettiva.
Capitolo 2
Cenni sugli insieminumerici
2.1 L’insieme dei numeri naturali e dei nume-ri interi
L’insieme dei numeri naturali: 0, 1, 2, 3, . . . viene denotato con il simbolo
N .
Tra le proprieta algebriche di N ci si limita a segnalare il fatto che inN sono definite due operazioni algebriche, l’addizione + : N × N → N e lamoltiplicazione · : N× N→ N che hanno le seguenti proprieta
• (Proprieta associativa) Per ogni n,m, p ∈ N si ha
(n+m) + p = n+ (m+ p) , (n ·m) · p = n · (m · p) .
Come conseguenza di tale proprieta, la somma e il prodotto di n,m e ppotranno essere denotati semplicemente con n+m+p e rispettivamentecon n ·m · p.
• (Proprieta commutativa) Per ogni n,m ∈ N si ha
n+m = m+ n , n ·m = m · n .
• (Esistenza dell’elemento neutro) Per ogni n ∈ N si ha
n+ 0 = n (= 0 + n) , n · 1 = n (= 1 · n) .
Quindi lo 0 e l’elemento neutro per l’addizione mentre 1 e l’elementoneutro per la moltiplicazione.
30 Capitolo 2: Cenni sugli insiemi numerici
Oltre alle proprieta precedenti valgono anche le seguenti proprieta di-stributive, per ogni n,m, p ∈ N
n · (m+ p) = n ·m+ n · p .
(A secondo membro si e usata la convenzione che in espressioni in cui in-tervengono sia somme che prodotti, i prodotti vanno eseguiti per priminell’ordine in cui compaiono e poi le somme nell’ordine in cui compaiono.)
Sull’insieme dei numeri naturali e definita anche la seguente relazioned’ordine:
∀ n,m ∈ N : n ≤ m ⇔ ∃ h ∈ N t.c. m = n+ h .
Si verificano facilmente le proprieta riflessiva, antisimmetrica e transitivaper tale relazione che quindi viene ad essere una relazione d’ordine. Tra lesue proprieta conviene tener presente la compatibilita con l’addizione
∀ n,m, p ∈ N : n ≤ m ⇒ n+ p ≤ m+ p
e con la moltiplicazione
∀ n,m, p ∈ N, p = 0 : n ≤ m ⇒ n · p ≤ m · p .
Inoltre la relazione d’ordine di N e una relazione di totale ordine, nel sen-so che due qualsiasi numeri naturali sono paragonabili mediante questarelazione:
∀ n,m ∈ N : (n ≤ m) ∨ (m ≤ m) ,
da cui segue che, per ogni coppia (n,m) di numeri naturali e vera una eduna sola delle seguenti affermazioni:
n < m , n = m , m < m
(la scrittura n < m e da intendersi come abbreviazione di (n ≤ m) ∧ (n =m)).
Nonostante le proprieta elencate, dal punto di vista della risoluzionedi equazioni algebriche (cioe equazioni in cui compaiono solamente sommee prodotti) N non e molto soddisfacente: alcune semplici equazioni comen+ 1 = 0 non ammettono alcuna soluzione in N.
Se si considera l’insieme Z dei numeri interi relativi: . . . , -3, -2, -1, 0, 1,2, 3, . . . , si ottiene un insieme in cui valgono tutte le proprieta algebricheprecedenti e inoltre per l’addizione vale la seguente proprieta
• (Esistenza dell’inverso per l’addizione) Per ogni n ∈ Z esiste m ∈ Ztale che n+m = 0 (= m+ n) .

2.1 L’insieme dei numeri naturali e dei numeri interi 31
L’elemento m previsto nella proprieta precedente e inoltre unico e vienedenominato opposto di n e denotato con −n. Quindi n+ (−n) = 0.
La proprieta precedente consente di considerare in Z l’operazione disottrazione ponendo, per ogni n,m ∈ Z,
n−m = n+ (−m) .
Anche in Z si puo definire una relazione d’ordine nel modo seguente:
∀ n,m ∈ Z : n ≤ m ⇔ m− n ∈ N ,
che continua ad essere compatibile con l’addizione e la moltiplicazione in Ze che risulta anch’essa di totale ordine.
Tuttavia anche in Z se da un lato si puo risolvere l’equazione precedenten+1 = 0 (proprio sottraendo 1 a primo e secondo membro) e facile trovareequazioni che non possono essere risolte, come ad esempio 2n+ 1 = 0. Pertrovare una soluzione di quest’ultima equazione bisogna ricorrere anche inquesto caso ad un insieme piu grande. Prima di occuparci di tale aspetto,conviene pero considerare separatamente un’ulteriore proprieta dei numerinaturali.
2.1.1 Principio di induzione
Per quanto riguarda l’insieme dei numeri naturali, si richiama la seguen-te proprieta, la cui dimostrazione e basata sulle proprieta della relazioned’ordine di N.
Proposizione 2.1.1 (Principio di induzione completa) Se A e un sot-toinsieme di N tale che
1) 0 ∈ A ,2) n ∈ A ⇒ n+ 1 ∈ A ,
allora A = N.
Si supponga che, per ogni n ∈ N, sia assegnata una proprieta P(n);applicando il principio di induzione all’insieme A := n ∈ N | P(n), siriconosce che se P(0) e vera e se, supposta vera P(n) per un fissato n ∈ N,risulta vera anche P(n+1), allora la proprieta P(n) e vera per ogni n ∈ N.
Naturalmente, se anziche considerare 0 come punto iniziale si consideraun numero naturale n0, si avra che la proprieta P(n) sara vera per ognin ≥ n0.
La proprieta precedente e equivalente a quella cosiddetta di buon ordi-ne di N, che afferma che ogni sottoinsieme di N e dotato del piu piccoloelemento, cioe
A ⊂ N ⇒ ∃ n0 ∈ A t.c. ∀ n ∈ A : n0 ≤ n .

32 Capitolo 2: Cenni sugli insiemi numerici
Infatti si supponga che valga il principio di induzione completa e sia A un sottoinsiemenon vuoto di N. Se 0 ∈ A si ha che 0 e ovviamente il piu piccolo elemento di A e quindi Ae dotato del piu piccolo elemento. Si supponga ora 0 /∈ A e si ponga B = n ∈ N | ∀ k =0, . . . , n : k /∈ A (quindi gli elementi di B sono minori o uguali di tutti gli elementi diA). Ovviamente 0 ∈ B. Se, per ogni n ∈ B, si ha n+1 ∈ B allora B verifica le ipotesi delprincipio di induzione completa da cui B = N. Segue che A = ∅ e cio e assurdo. Quindideve esistere n0 ∈ B tale che n0 + 1 /∈ B. Allora, per ogni k = 0, . . . , n0, si ha k /∈ Amentre n0 + 1 ∈ A e quindi n0 + 1 e il piu piccolo elemento di A.
Viceversa si supponga che valga la proprieta di buon ordine di N e sia A un sottoin-
sieme di N tale che 0 ∈ A e tale che n ∈ A ⇒ n + 1 ∈ A. Se fosse A = N allora il
complementare B = N " A sarebbe non vuoto e quindi sarebbe dotato del piu piccolo
elemento n0. Si osserva che n0 > 0 in quanto 0 ∈ A; quindi si puo considerare n0 − 1
che deve essere in A in quanto n0 e il piu piccolo elemento di B e n0 − 1 < n0. Ma
n0 − 1 ∈ A ⇒ n0 = (n0 − 1) + 1 ∈ A e cio e assurdo in quanto n0 ∈ B. Quindi si pio
concludere che A = N.
Si osserva infine che la proprieta di buon ordine implica quella di totaleordine di N: infatti se n,m ∈ N basta applicare la proprieta di buon ordineall’insieme A = n,m per ottenere la validita di una delle relazioni n ≤ moppure m ≤ n.
La proprieta di buon ordine, e quindi anche il principio di induzionecompleta, non valgono in Z (basta considerare come sottoinsieme A tuttoZ).
2.1.2 Formula del binomio di Newton
Il principio di induzione completa consente di riconoscere agevolmente laseguente formula del binomio di Newton. E necessario tuttavia introdurrealcune notazioni preliminari.
Innanzitutto, conviene richiamare la definizione di fattoriale di un nu-mero naturale:
0! := 1 , ∀ n ∈ N : (n+ 1)! := (n+ 1) · n! . (2.1.1)
Si possono definire ora i coefficienti binomiali. Se n ∈ N e k = 0, . . . , n,
si definisce coefficiente binomiale n su k, e si denota con
(n
k
), il seguente
numero naturale:(n
k
):=
n!
k! (n− k)!=
n(n− 1) · · · (n− k + 1)
k!. (2.1.2)
Il motivo per cui tale numero viene denominato coefficiente binomialerisultera chiaro dallo studio della formula del binomio di Newton.
Si possono elencare le seguenti proprieta elementari dei coefficienti bi-nomiali.

2.1 L’insieme dei numeri naturali e dei numeri interi 33
1. Per ogni n ∈ N, si ha(n
0
)= 1,
(n
n
)= 1.
2. Per ogni n ≥ 2 e k = 1, . . . , n− 1, si ha(n
k
)=
n · (n− 1) · · · (n− k + 1)
k!.
3. Per ogni n ∈ N e k = 0, . . . , n(
n
n− k
)=
(n
k
).
4. Per ogni n ≥ 1 e k = 1, . . . , n, si ha(n+ 1
k
)=
(n
k
)+
(n
k − 1
).
Infatti, dalla definizione,(nk
)+( n
k − 1
)=
n!
k!(n− k)!+
n!
(k − 1)!(n− k + 1)!=
(n− k + 1) · n! + k · n!k!(n− k + 1)!
=(n+ 1) · n!
k!(n− k + 1)!=
(n+ 1)!
k!(n− k + 1)!=(n+ 1
k
).
Proposizione 2.1.2 (Formula del binomio di Newton) Per ogni a, b ∈R ed n ≥ 1, si ha:
(a+ b)n =n∑
k=0
(n
k
)akbn−k .
Dimostrazione. Se n = 1, la tesi e ovvia. Si supponga ora che la tesi sia vera per unnumero naturale n ≥ 1.
Allora, dalle proprieta dei coefficienti binomiali,
(a+ b)n+1 = (a+ b)n · (a+ b) = a · (a+ b)n + b · (a+ b)n
=n∑
k=0
(nk
)ak+1bn−k +
n∑
k=0
(nk
)akbn+1−k
= an+1 +n−1∑
k=0
(nk
)ak+1bn−k + bn+1 +
n∑
k=1
(nk
)akbn+1−k
= an+1 + bn+1 +n∑
h=1
( n
h− 1
)ahbn−h+1 +
n∑
k=1
(nk
)akbn+1−k
= an+1 + bn+1 +n∑
k=1
(( n
k − 1
)+(nk
))akbn+1−k
= an+1 + bn+1 +n∑
k=1
(n+ 1
k
)akbn+1−k
=n+1∑
k=0
(n+ 1
k
)akbn+1−k ,

34 Capitolo 2: Cenni sugli insiemi numerici
e quindi la tesi e vera per il numero naturale n+ 1. Dal principio di induzione (Proposi-
zione 2.1.1), si ottiene la tesi.
2.1.3 Cenni di calcolo combinatorio
Si introducono ora alcune definizioni di carattere combinatorio.
Definizione 2.1.3 Siano a1, . . . , an oggetti distinti. Se k e un intero com-preso tra 1 ed n, si definisce disposizione semplice degli n oggetti a k a k,ogni k-pla (aj1 , . . . , ajk) formata da k oggetti distinti tra gli n assegnati.
Pertanto due disposizioni di n oggetti a k a k possono differire o per unoggetto oppure anche per l’ordine in cui gli oggetti vengono considerati.
Il numero delle disposizioni di n oggetti a k a k viene indicato con Dn,k.Tenendo presente che il primo dei k oggetti puo essere scelto tra tutti gli noggetti, che il secondo puo essere scelto tra i rimanenti n− 1 oggetti e cosıvia, il numero delle disposizioni di n oggetti a k a k risulta essere:
Dn,k = n(n− 1) · · · (n− k + 1) .
Nel caso particolare in cui k = n, si preferisce parlare di permutazioni din oggetti (distinti) anziche di disposizione di n oggetti ad n ad n. Convieneosservare che due permutazioni possono differire solamente per l’ordine deglin oggetti in quanto contengono tutti gli n oggetti disponibili. Indicato conPn il numero di permutazioni di n oggetti, si ha quindi
Pn = n! .
Il numero Pn quindi indica il numero di modi possibili in cui si possonoordinare n oggetti distinti.
Si puo fornire a questo punto la definizione di combinazione semplice.
Definizione 2.1.4 Siano a1, . . . , an oggetti distinti. Se k e un intero com-preso tra 1 ed n, si definisce combinazione semplice degli n oggetti a k a k,ogni insieme aj1 , . . . , ajk formato da k oggetti distinti tra gli n assegnati.
A differenza delle disposizioni, due combinazioni distinte di n oggettia k a k devono differire per almeno un oggetto (l’ordine in cui gli oggettivengono considerati in questo caso non ha importanza).
Il numero delle combinazioni semplici di n oggetti a k a k viene indicatocon Cn,k. Tenendo presente che k oggetti possono differire per l’ordine inPk modi distinti e che una combinazione individua quindi Pk disposizionidistinte, si ha
Cn,k =Dn,k
Pk=
(n
k
).

2.1 L’insieme dei numeri naturali e dei numeri interi 35
Tale numero rappresenta il numero di tutti i sottoinsiemi formati da kelementi in un insieme di n elementi.
Fino ad ora sono stati considerati sempre oggetti distinti. In molteapplicazioni, tuttavia, e consentito avere la possibilita di ripetere piu volteuno stesso oggetto. In tali casi si fa ricorso alle definizioni seguenti.
Definizione 2.1.5 Siano a1, . . . , an oggetti distinti. Se k ≥ 1, si definiscedisposizione con ripetizione degli n oggetti a k a k, ogni k-pla (aj1 , . . . , ajk)formata da k oggetti non necessariamente distinti tra gli n assegnati.
Due disposizioni con ripetizione di n oggetti a k a k possono differireper un oggetto, per il numero di volte in cui un oggetto compare oppure perl’ordine in cui gli oggetti vengono considerati.
Il numero delle disposizioni con ripetizione di n oggetti a k a k viene in-dicato con Dr
n,k. Questa volta, sia il primo dei k oggetti che tutti i successivipossono essere scelti tra tutti gli n oggetti, e quindi
Drn,k = nk .
Anche ora, nel caso particolare in cui k = n, si preferisce parlare dipermutazioni con ripetizione di n oggetti anziche di disposizione con ripe-tizione di n oggetti ad n ad n. Indicato con P r
n il numero di permutazionicon ripetizione di n oggetti, si ha:
P rn = nn .
Un’ultima definizione riguarda le combinazioni con ripetizione.
Definizione 2.1.6 Siano a1, . . . , an oggetti distinti. Se k ≥ 1, si definiscecombinazione con ripetizione degli n oggetti a k a k, ogni insieme formatoda k oggetti non necessariamente distinti tra gli n assegnati.
Due combinazioni con ripetizione di n oggetti a k a k possono differire perun oggetto oppure per il numero di volte in cui un oggetto viene considerato,indipendentemente pero dall’ordine.
Il numero delle combinazioni con ripetizione di n oggetti a k a k vieneindicato con Cr
n,k.In questo caso, il fatto che i k oggetti non devono essere necessariamente
distinti equivale a supporre che l’insieme di partenza sia formato da n+k−1elementi distinti anziche da n elementi distinti e che i k oggetti debbano peroessere distinti tra loro. Da cio segue:
Crn,k = Cn+k−1,k =
(n+ k − 1
k
).

36 Capitolo 2: Cenni sugli insiemi numerici
2.2 L’insieme dei numeri razionali e reali
L’insieme dei numeri razionali viene denotato con il simbolo
Q
ed e costituito da tutti i numeri che possono essere espressi nella forma
m
n, dove m ∈ Z ed n ∈ N" 0.
Un numero razionale q ∈ Q si puo rappresentare in forma decimale:
q = a0, a1 . . . arar+1 . . . ar+s
dove a0 ∈ Z, a1 . . . ar+s ∈ 0, 1, . . . , 9 e la parte periodica ar+1 . . . ar+s eda intendersi ripetuta infinite volte.
Anche l’insieme dei numeri razionali e dotato di una struttura algebricae di una struttura di ordine. Per quanto riguarda la struttura algebrica,oltre alle proprieta precedenti, vale al seguente ulteriore proprieta
• (Esistenza dell’inverso per la moltiplicazione) Per ogni q ∈ Q " 0esiste r ∈ Z tale che q · r = 1 (= r · q) .
L’elemento r previsto nella proprieta precedente e inoltre unico e vienedenominato reciproco di n e denotato con 1/q oppure con q−1. Quindiq · q−1 = 1.
Si osservi che l’esistenza del reciproco e prevista solo per i numeri diversida 0.
La proprieta precedente consente di considerare in Q l’operazione didivisione ponendo, per ogni q, r ∈ Q,
q
r= q · r−1 .
Tale proprieta consente di risolvere equazioni algebriche che non erapossibile risolvere nell’insieme Z (come ad esempio 2n+1 = 0 (sottraendo 1a primo e secondo membro e moltiplicando entrambi i membri per i reciprocodi 2). Tuttavia anche in questo insieme alcune semplici equazioni algebriche,come n2 − 2 = 0 non hanno alcuna soluzione. Cio dipende pero non piudalla struttura algebrica ma dalla proprieta di completezza della relazioned’ordine che sara discussa di seguito.
Anche in Q infatti si puo definire una relazione d’ordine nel modo se-guente:
∀ q, q′ ∈ Q : q ≤ q′ ⇔ m · n′ ≤ m′ · n ,

2.2 L’insieme dei numeri razionali e reali 37
dove m,m′ ∈ Z e n, n′ ∈ N " 0 sono tali che q = m/n e q′ = m′/n′ ela relazione d’ordine a secondo membro e quella gia nota nell’insieme Z. Siriconosce infatti che la proprieta a secondo membro dipende solo dai numerirazionali q e q′ e non dalla loro particolare rappresentazione sotto forma difrazione di numeri interi.
La relazione d’ordine di Q continua ad essere compatibile con l’addizionee la moltiplicazione in Q e risulta ancora di totale ordine.
Per approfondire lo studio della relazione d’ordine di Q conviene in-trodurre l’insieme dei numeri reali ed evidenziare le differenze tra i dueinsiemi.
L’insieme dei numeri reali, viene denotato con
R
ed e costituito da tutti i numeri che in forma decimale hanno la seguenterappresentazione
a0, a1a2a3 . . .
dove a0 ∈ Z, a1a2a3 · · · ∈ 0, 1, . . . , 9 e non vi e necessariamente una parteperiodica.
Dal punto di vista della struttura algebrica anche in R sono definitel’addizione e la moltiplicazione tra numeri reali, le cui proprieta sono lestesse dell’insieme Q.
La relazione d’ordine puo essere definita anche nell’insieme dei numerireali ponendo per ogni a = a0, a1a2a3 · · · ∈ R e b = b0, b1b2b3 · · · ∈ R,
a ≤ b ⇔ ∀ k ∈ N : a0, a1a2a3 . . . ak ≤ b0, b1b2b3 . . . bk ;
si osservi che per ogni k ∈ N, i numeri a0, a1a2a3 . . . ak e b0, b1b2b3 . . . bksono razionali e quindi la relazione d’ordine a secondo membro e quella giadefinita in Q.
Si considera ora una proprieta rilevante della relazione d’ordine di R.Innanzitutto, due sottoinsiemi non vuoti A e B di R (o rispettivamente di
Q) vengono denominati separati in R (o rispettivamente in Q) se e verificatauna delle seguenti condizioni
∀ a ∈ A ∀ b ∈ B : a ≤ b oppure ∀ a ∈ A ∀ b ∈ B : b ≤ a .
Se due insiemi A e B sono separati, si dice elemento separatore di A e Bogni numero reale (rispettivamente, razionale) λ tale che
∀ a ∈ A ∀ b ∈ B : a ≤ λ ≤ b oppure ∀ a ∈ A ∀ b ∈ B : b ≤ λ ≤ a .
Inoltre due insiemi A e B separati si dicono contigui se
∀ ε > 0 ∃ a ∈ A ∃ b ∈ B : b− a < ε (oppure a− b < ε) .

38 Capitolo 2: Cenni sugli insiemi numerici
Ovviamente due insiemi continui possono ammettere al piu un elementoseparatore in quanto se λ, µ fossero due elementi separatori con λ < µ laproprieta precedente non sarebbe verificata per ε = µ− λ.
Una proprieta rilevante di R riguarda proprio l’esistenza di elementiseparatori di insiemi separati.
Proposizione 2.2.1 (Assioma di completezza di R) Se A e B so-no due sottoinsiemi separati di R, essi ammettono almeno un elementoseparatore.
In particolare se A e B sono contigui, essi ammettono uno ed un soloelemento separatore.
La proprieta precedente differenzia R da Q. Infatti nell’insieme Q nonvale una proprieta analoga. Ad esempio, i seguenti sottoinsiemi
A = q ∈ Q | q ≥ 0 , q2 < 2 , B = q ∈ Q | q ≥ 0 , q2 > 2
sono separati in Q (anzi sono contigui) ma non ammettono alcun elementoseparatore in Q (in R invece l’elemento separatore di tali insiemi e
√2, come
seguira dal teorema di esistenza della radice n-esima).Il fatto che
√2 non e razionale si puo dimostrare per assurdo supponendo che
√2 =
m/n con m,n ∈ N"0 primi tra loro; infatti da cio segue m2/n2 = 2 e quindi m2 = 2n2;
alloram2 e pari e cio comporta chem stesso sia pari, da cui m = 2p con p ∈ N; sostituendo2p ad m si ottiene 4p2 = 2n2 da cui n2 = 2p2; segue che anche n2, e conseguentemente
n, deve essere pari e cio e assurdo in quanto si era supposto che m ed n fossero primi tra
loro.
Come conseguenza della proprieta precedente, in R valgono diverse pro-prieta tra cui una delle piu importanti e il seguente teorema sull’esistenzadella radice n-esima.
Teorema 2.2.2 (Esistenza della radice n-esima) Sia n ≥ 1; allora perogni a ∈ R con a ≥ 0 esiste uno ed un solo b ∈ R tale che b ≥ 0 e bn = a.
Se a ∈ R e a ≥ 0, l’unico elemento b ∈ R tale che b ≥ 0 e bn = a vienedenominato radice n-esima di a e denotato con uno dei seguenti simboli
n√a , a1/n .
La dimostrazione del teorema precedente e basata sul fatto che gli insiemi
A = x ∈ R | x ≥ 0 , xn ≤ a , B = x ∈ R | x ≥ 0 , xn ≥ a
sono contigui e quindi, per l’assioma di completezza, in R ammettono ununico elemento separatore b ∈ R che deve essere positivo e soddisfarenecessariamente la condizione bn = a.

2.2 L’insieme dei numeri razionali e reali 39
Proprio utilizzando il teorema precedente in R e possibile risolvere al-cune equazioni algebriche che in Q non avevano alcuna soluzione, comel’equazione n2 − 2 = 0. Tuttavia anche in R si possono trovare equazionialgebriche che non hanno soluzioni, come l’equazione n2 + 1 = 0. Per risol-vere quest’ultima equazione bisognera ancora una volta introdurre un nuovoinsieme numerico piu grande, quello dei numeri complessi, in cui pero tuttele equazioni algebriche avranno finalmente almeno una soluzione.
Una proprieta importante che conviene osservare riguarda la densita deinumeri razionali e dei numeri irrazionali in R.
• (Proprieta di densita) Per ogni a, b ∈ R con a < b esistono almeno unnumero razionale q ∈ Q ed un numero reale non razionale r ∈ R"Qtali che
a < q < b , a < r < b .
Come conseguenza della proprieta precedente si puo affermare che tradue numeri reali esistono sempre infiniti numeri razionali ed infiniti numerireali non razionali.
Si conclude la presente sezione con alcune notazioni spesso utilizzate.Nel seguito sara utile utilizzare la convenzione di scrivere un asterisco in
alto a destra ad un insieme per denotare lo stesso insieme privato del nu-mero 0, ed il segno + (oppure −) per denotare gli elementi positivi (oppurenegativi) dell’insieme. Pertanto, ad esempio
R∗ = R" 0, R∗+ = x ∈ R | x > 0, Q− = q ∈ Q | q ≤ 0.
Un’altra convenzione riguarda la somma e il prodotto di un numerofinito di elementi di un insieme numerico: assegnati i numeri a1, . . . , an sipone
n∑
k=1
ak := a1 + . . . an ,n∏
k=1
ak := a1 · · · an .
2.2.1 Insiemi numerabili
Una ulteriore proprieta dell’insieme dei numeri reali, che distingue tale in-sieme da quelli numerici introdotti in precedenza, riguarda il fatto che essoe un infinito di ordine maggiore rispetto all’insieme dei numeri razionali,come viene messo brevemente in evidenza nel presente paragrafo.
Innanzitutto conviene assumere la seguente definizione di carattere ge-nerale. Un insieme E si dice numerabile se esiste una funzione biiettivaϕ : N→ E (o equivalentemente se esiste una funzione biiettiva ψ : E → N).

40 Capitolo 2: Cenni sugli insiemi numerici
L’esistenza di una funzione biiettiva definita in N comporta che gli ele-menti di E possano essere “contati” enumerando successivamente i valoridella funzione:
ϕ(0), ϕ(1), ϕ(2), ϕ(3), . . .
e cio giustifica la denominazione “numerabile” attribuita all’insieme.Come conseguenza della definizione, segue subito che N e numerabile.Inoltre ogni sottoinsieme non vuoto di un insieme numerabile o e finito
oppure e numerabile. Quindi gli insiemi numerabili sono gli insiemi infiniti“piu piccoli”.
Da tale osservazione segue subito, ad esempio, che gli insiemi dei numeripari, dei numeri dispari, dei numeri primi sono tutti numerabili.
Si osserva ancora che se esiste una funzione suriettiva da un insieme nu-merabile E in un insieme F (oppure equivalentemente una funzione iniettivada F in un insieme numerabile E) allora F e finito oppure numerabile.
Si riconosce ora che Z e un insieme numerabile. Infatti, una “enumera-zione” degli elementi di Z e la seguente
0, 1, −1, 2, −2, 3, −3, 4, −4, 5, −5, . . . ;
la corrispondente funzione biiettiva ϕ : N→ Z si puo in questo caso definireponendo, per ogni n ∈ N,
ϕ(n) = (−1)n+1
[n+ 1
2
],
dove [·] denota la funzione parte intera.
Per dimostrare che anche l’insieme dei numeri razionali Q e numera-bile, conviene prima osservare che il prodotto di due insiemi numerabili enumerabile.
Infatti se E ed F sono numerabili e se ϕ : E → N e ψ : F → N sono biiettive alloraanche la funzione χ : E × F → N definita ponendo, per ogni (m,n) ∈ E × F ,
χ(m,n) =(m+ n)(m+ n+ 1)
2+m
e una funzione biiettiva e quindi il prodotto E × F e numerabile.
La funzione χ conta gli elementi del prodotto su ogni diagonale in cui la somma
m+n e costante; infatti si parte da m+n = 0 e si ottiene l’unica coppia (0, 0) alla quale
corrisponde 0; si considerano poi gli indici per cui m + n = 1 e si ottengono le coppie
(0, 1) e (1, 0) alle quali corrisponde 1 e 2; poi si considerano gli indici tali che m+ n = 2
e si ottengono le coppie (2, 0), (1, 1) e (0, 2) alle quali corrispondono i numeri naturali 3,
4 e 5 e cosı via. Tale procedimento viene denominato per diagonali.
A questo punto si osserva che il prodotto cartesiano Z × (N " 0) enumerabile in quanto prodotto di insiemi numerabili.

2.3 Proprieta dei sottoinsiemi di R 41
Si consideri ora la funzione ψ : Z× (N" 0)→ Q definita ponendo, perogni (m,n) ∈ Z× (N" 0),
ψ(m,n) =m
n.
Poiche ψ e suriettiva (quindi Q puo essere considerato come un sottoinsiemedel prodotto cartesiano Z×(N"0)) allora anche Q deve essere numerabile.
Infine si dimostra che R non e numerabile.Si consideri infatti una funzione ϕ : N → R e si definisca il seguente
numero realea = a0, a1a2a3 . . .
ponendo a0 uguale alla parte intera di ϕ(0) aumentata di 1, a1 uguale allaprima cifra decimale di ϕ(1) aumentata di 1 oppure uguale a 0 se tale cifrae uguale a 9, a2 uguale alla seconda cifra decimale di ϕ(2) aumentata di1 oppure uguale a 0 se tale cifra e uguale a 9, e cosı via. Allora e chiaroche a e diverso da ogni elemento ϕ(n), n ∈ N, e quindi ϕ non puo esseresuriettiva.
Quindi non puo esistere alcuna funzione suriettiva (e tanto meno biiet-tiva) da N in R e da cio segue la non numerabilita di R.
2.3 Proprieta dei sottoinsiemi di RIn questa sezione vengono raccolte diverse proprieta dei sottoinsiemi di Rche saranno utili per lo studio delle funzioni reali.
2.3.1 Intervalli di RInnanzitutto si introducono alcuni sottoinsiemi di R di particolare rilevanza.Essi vengono denominati intervalli di R:
• Intervalli limitati. Siano a, b ∈ R tali che a < b. Si pone:
[a, b] = x ∈ R | a ≤ x ≤ b (intervallo limitato chiuso di estremia e b);
]a, b[= x ∈ R | a < x < b (intervallo limitato aperto di estremia e b);
[a, b[= x ∈ R | a ≤ x < b (intervallo limitato semichiuso asinistra (oppure semiaperto a destra) di estremi a e b);
]a, b] = x ∈ R | a < x ≤ b (intervallo limitato semiaperto asinistra (oppure semichiuso a destra) di estremi a e b);

42 Capitolo 2: Cenni sugli insiemi numerici
• Intervalli illimitati. Sia c ∈ R. Si pone:[c,+∞[= x ∈ R | c ≤ x (intervallo illimitato a destra chiuso di
estremo c);
]c,+∞[= x ∈ R | c < x (intervallo illimitato a destra aperto diestremo c);
]−∞, c] = x ∈ R | x ≤ c (intervallo illimitato a sinistra chiusodi estremo c);
] −∞, c[= x ∈ R | x < c (intervallo illimitato a destra apertodi estremo c).
Le notazioni [c,→ [ e ]←, c] sono equivalenti a [c,+∞[ e ]−∞, c].
Se x0 ∈ R e δ ∈ R∗+, si denomina intervallo centrato aperto (rispettiva-
mente, chiuso) di centro x0 e raggio δ, l’intervallo aperto ]x0 − δ, x0 + δ[(rispettivamente, l’intervallo chiuso [x0 − δ, x0 + δ]). Nel seguito, saraopportuno ricorrere alle seguenti notazioni:
Iδ(x0) =]x0 − δ, x0 + δ[ , I+δ (x0) = [x0, x0 + δ[ , I−δ (x0) =]x0 − δ, x0] .(2.3.1)
2.3.2 Valore assoluto e distanza in RPer ogni x ∈ R, il valore assoluto di x viene denotato con |x| ed e definitoal modo seguente
|x| :=
x , se x ≥ 0 ,−x , se x < 0 .
(2.3.2)
In base alla definizione precedente, si dimostrano facilmente le seguentiproprieta, valide per ogni x, y ∈ R.
1. |x| ≥ 0 ;
2. |x| = 0 ⇔ x = 0 ;
3. |− x| = |x| ;
4. x ≤ |x| ;
5. |x · y| = |x| · |y| ;
6. |x+ y| ≤ |x|+ |y| ;(infatti, se x + y ≥ 0, dalla proprieta 4., |x + y| = x + y ≤ |x| + |y|, mentre, se
x+ y < 0, sempre dalle 4. e 3., |x+ y| = −x− y ≤ |− x|+ |− y| = |x|+ |y|).

2.3 Proprieta dei sottoinsiemi di R 43
7. | |x|− |y| | ≤ |x− y| ;
(infatti, se |x|− |y| ≥ 0, dalla proprieta 6. si ha |x| = |(x− y)+ y| ≤ |x− y|+ |y| equindi | |x|− |y| | = |x|− |y| ≤ |x− y|; se |x|− |y| < 0, si procede allo stesso modo
invertendo i ruoli di x e y.)
Nello studio delle disequazioni che coinvolgono il valore assoluto risultanoinoltre particolarmente utili le proprieta seguenti, in cui il valore assolutoviene confrontato con un numero reale a.
8. i) se a < 0, la diseguaglianza |x| ≤ a non e mai soddisfatta;
ii) se a ≥ 0, si ha |x| ≤ a se e solo se −a ≤ x ≤ a.
9. i) se a ≤ 0, la diseguaglianza |x| < a non e mai soddisfatta;
ii) se a > 0, si ha |x| < a se e solo se −a < x < a.
10. i) se a ≤ 0, la diseguaglianza |x| ≥ a e sempre soddisfatta;
ii) se a > 0, si ha |x| ≥ a se e solo se x ≤ −a oppure x ≥ a;
11. i) se a < 0, la diseguaglianza |x| > a e sempre soddisfatta;
ii) se a ≥ 0, si ha |x| > a se e solo sex < −a oppure x > a.
Il valore assoluto di un numero reale consente di definire la distanza tradue numeri reali. Precisamente, per ogni coppia di numeri reali (x, y) ∈ R2,la distanza di x da y viene denotata con d(x, y) ed e definita ponendo
d(x, y) := |x− y| .
Valgono le seguenti proprieta della distanza, che seguono direttamentedalle proprieta 1., 2., 3. e 6. del valore assoluto elencate sopra.
1. ∀ (x, y) ∈ R2 : d(x, y) ≥ 0 ;
2. ∀ (x, y) ∈ R2 : d(x, y) = 0⇔ x = y ;
3. ∀ (x, y) ∈ R2 : d(y, x) = d(x, y) (proprieta simmetrica della distanza);
4. ∀ (x, y, z) ∈ R3 : d(x, z) ≤ d(x, y) + d(y, z) (proprieta triangolaredella distanza).

44 Capitolo 2: Cenni sugli insiemi numerici
2.3.3 Rappresentazione geometrica di Rn, n ≤ 3
Nello studio delle funzioni reali, di interesse centrale nel seguito, sara dinotevole aiuto la rappresentazione geometrica sia di R che di R2 e, per lefunzioni di due variabili, anche di R3.
L’insieme dei numeri reali viene solitamente rappresentato come l’insie-me dei punti di una retta. Infatti, sia r una retta e si fissino due puntidistinti O e U di r corrispondenti ai numeri reali 0 e 1. La semiretta aventeO come estremo e contenente il punto U viene denominata semiasse positivoed indicata con r+; analogamente, la semiretta di estremo O non contenenteil punto U viene denominata semiasse negativo ed indicata con r−. Si puoallora definire una corrispondenza tra un numero reale x ed uno ed un soloelemento P della retta r prendendo il segmento OU come unita di misura econsiderando il segmento OP avente lunghezza x con P in r+ se x e positivoe P in r− se x e negativo. Viceversa, la stessa corrispondenza consente difar corrispondere ad ogni punto P della retta uno ed un solo numero realex. In questo modo ogni numero reale viene identificato con un punto dellaretta r e viceversa. Per questo motivo la retta r (o l’insieme R) viene anchedenominata retta reale cosı come gli elementi di R vengono spesso chiamatipunti. Infine la semiretta positiva r+ (denominata anche semiretta positiva)viene spesso evidenziata mediante una freccia come in Figura 2.1.
•0
•1
r
Figura 2.1: Rappresentazione geometrica dei numeri reali.
Si considera ora una rappresentazione del prodotto cartesiano R2. Inquesto caso si fissano due rette r1 ed r2 non parallele su un piano π. Sidenota con O il punto di intersezione di r1 ed r2 ed inoltre su ognuna delledue rette si considera un ulteriore punto distinto da O che verra denotatocon U1 e rispettivamente U2. In questo modo si dice che e stato assegna-to un riferimento cartesiano ed il piano π viene anche denominato pianocartesiano. Ad ogni (x, y) ∈ R2, si puo far corrispondere una ed una solacoppia (P1, P2) con P1 ∈ r1 e P2 ∈ r2 (in quanto sulle rette r1 ed r2 sipuo considerare una rappresentazione dei numeri reali) e successivamentesi puo considerare il punto P del piano π ottenuto come intersezione delle
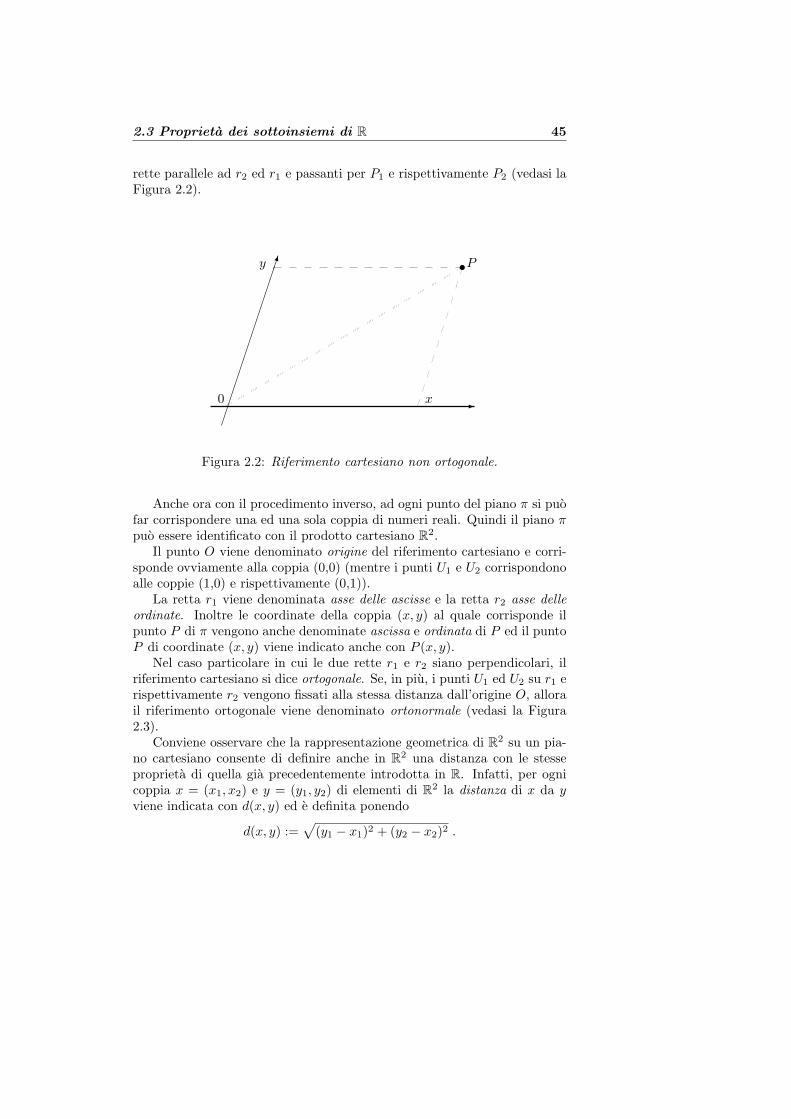
2.3 Proprieta dei sottoinsiemi di R 45
rette parallele ad r2 ed r1 e passanti per P1 e rispettivamente P2 (vedasi laFigura 2.2).
•
0
P
x
y
Figura 2.2: Riferimento cartesiano non ortogonale.
Anche ora con il procedimento inverso, ad ogni punto del piano π si puofar corrispondere una ed una sola coppia di numeri reali. Quindi il piano πpuo essere identificato con il prodotto cartesiano R2.
Il punto O viene denominato origine del riferimento cartesiano e corri-sponde ovviamente alla coppia (0,0) (mentre i punti U1 e U2 corrispondonoalle coppie (1,0) e rispettivamente (0,1)).
La retta r1 viene denominata asse delle ascisse e la retta r2 asse delleordinate. Inoltre le coordinate della coppia (x, y) al quale corrisponde ilpunto P di π vengono anche denominate ascissa e ordinata di P ed il puntoP di coordinate (x, y) viene indicato anche con P (x, y).
Nel caso particolare in cui le due rette r1 e r2 siano perpendicolari, ilriferimento cartesiano si dice ortogonale. Se, in piu, i punti U1 ed U2 su r1 erispettivamente r2 vengono fissati alla stessa distanza dall’origine O, allorail riferimento ortogonale viene denominato ortonormale (vedasi la Figura2.3).
Conviene osservare che la rappresentazione geometrica di R2 su un pia-no cartesiano consente di definire anche in R2 una distanza con le stesseproprieta di quella gia precedentemente introdotta in R. Infatti, per ognicoppia x = (x1, x2) e y = (y1, y2) di elementi di R2 la distanza di x da yviene indicata con d(x, y) ed e definita ponendo
d(x, y) :=√
(y1 − x1)2 + (y2 − x2)2 .

46 Capitolo 2: Cenni sugli insiemi numerici
•
0
P
x
y
Figura 2.3: Riferimento cartesiano ortonormale.
La rappresentazione geometrica di R3 si puo ottenere in maniera deltutto analoga a quella discussa considerando tre rette non complanari r1, r2ed r3 nello spazio Σ, che si intersecano in un punto 0. Su ognuna delle retter1, r2 ed r3, che per semplicita vengono supposte perpendicolari tra loro,viene fissato un ulteriore punto distinto da O e che viene denotato rispet-tivamente con U1, U2 e U3. Il piano contenente le rette r1, r2 viene spessodenominato piano xy, quello contenente le rette r1, r3 viene denominatopiano xz ed infine il piano contenente le rette r2, r3 viene denominato pianoyz.
Anche in questo caso si dice che e stato assegnato un riferimento car-tesiano nello spazio Σ, che viene denominato spazio euclideo. Ad ogni(x, y, z) ∈ R3, si puo far corrispondere una ed una sola terna (P1, P2, P3)con P1 ∈ r1, P2 ∈ r2 e P3 ∈ r3 e successivamente si puo considerare il puntoP di Σ ottenuto come intersezione dei piani paralleli ai piani yz, xz e xy epassanti rispettivamente per i punti P1, P2 e P3 (vedasi la Figura 2.4).
Il procedimento inverso fa corrispondere ad ogni punto di Σ una ed unasola terna di numeri reali. Quindi lo spazio Σ puo essere identificato con ilprodotto cartesiano R3.
Anche ora il punto O viene denominato origine del riferimento cartesianoe corrisponde ovviamente alla terna (0,0,0) (mentre i punti U1, U2 e U3
corrispondono alle terne (1,0,0), (0,1,0) e rispettivamente (0,0,1)).
La retta r1 viene denominata asse delle ascisse, la retta r2 asse delleordinate e infine la retta r3 asse delle altezze.

2.3 Proprieta dei sottoinsiemi di R 47
•
0
P
y
z
x
Figura 2.4: Riferimento cartesiano dello spazio.
Inoltre le coordinate della terna (x, y, z) alla quale corrisponde il puntoP di Σ vengono anche denominate ascissa, ordinata e altezza (oppure quota)di P ed il punto P di coordinate (x, y, x) viene indicato anche con P (x, y, z).
Per n ≥ 4 non e possibile una rappresentazione geometrica di Rn;tuttavia, e ancora possibile considerare una distanza che verifica le stesseproprieta di quella introdotta in R.
Si supponga infatti n ≥ 3. Per ogni coppia di n-ple x = (x1, . . . , xn) ey = (y1, . . . , yn) di elementi di Rn, infatti, si puo definire la distanza d(x, y)di x da y ponendo
d(x, y) :=
√√√√n∑
i=1
(yi − xi)2 .
2.3.4 Sottoinsiemi limitati ed estremi
Nella presente sezione si richiamano alcune nozioni relative ai sottoinsiemidi R che verranno utilizzate in seguito per definire altrettante proprieta dellefunzioni reali.
Sia X un sottoinsieme non vuoto di R. Valgono le seguenti definizioni.

48 Capitolo 2: Cenni sugli insiemi numerici
• Sottoinsiemi limitati. Si dice che X e limitato superiormente (ri-spettivamente, limitato inferiormente) se
∃M ∈ R t.c. ∀ x ∈ X : x ≤M (rispettivamente, M ≤ x ). (2.3.3)
Ogni elemento M ∈ R verificante la (2.3.3) viene denominato mag-giorante (rispettivamente, minorante) di X. Infine, si dice che X elimitato se e limitato sia superiormente che inferiormente, cioe se
∃ m,M ∈ R t.c. ∀ x ∈ X : m ≤ x ≤M . (2.3.4)
Gli intervalli illimitati a sinistra sono particolari esempi di sottoinsie-mi limitati superiormente di R, gli intervalli illimitati a destra sonoesempi di sottoinsiemi limitati inferiormente di R ed infine gli interval-li limitati sono sottoinsiemi limitati di R. Viceversa, ogni sottoinsiemelimitato superiormente di R e un sottoinsieme di un intervallo illimita-to a sinistra, ogni sottoinsieme limitati inferiormente e un sottoinsiemedi un intervallo illimitato a destra ed ogni sottoinsieme limitato di Re un sottoinsieme di un intervallo limitato di R.
• Sottoinsiemi dotati di massimo e minimo. Si dice X e dotato dimassimo (rispettivamente, dotato di minimo) se
∃ M ∈ X t.c. ∀ x ∈ X : x ≤M (rispettivamente, M ≤ x ). (2.3.5)
(A differenza dei maggioranti e minoranti in cuiM ∈ R, questa volta sipretende M ∈ X.) L’elemento M verificante la (2.3.5), univocamentedeterminato dalla condizione M ∈ X, viene denominato massimo diX (rispettivamente, minimo di X) e denotato con uno dei seguentisimboli:
maxX , maxx∈X
x , (rispettivamente, minX , minx∈X
x ).
Gli intervalli semichiusi a destra sono particolari esempi di sottoin-siemi dotati di massimo e quelli semichiusi a sinistra di sottoinsiemidotati di minimo.
• Sottoinsiemi dotati di estremi. Si dice X e dotato di estremosuperiore (rispettivamente, dotato di estremo inferiore) se esiste unelemento ℓ ∈ R tale che⎧⎨
⎩
1) ∀ x ∈ X : x ≤ ℓ (rispettivamente, ℓ ≤ x );2) m ∈ R, ∀ x ∈ X : x ≤ m ⇒ ℓ ≤ m
(rispettivamente, ∀ x ∈ X : m ≤ x ⇒ m ≤ ℓ ).(2.3.6)

2.3 Proprieta dei sottoinsiemi di R 49
Anche in questo caso l’elemento ℓ verificante la (2.3.6) e unico, vienedenominato estremo superiore di X (rispettivamente, estremo inferio-re di X) e viene denotato con
supX , supx∈X
x , (rispettivamente, infX , infx∈X
x ).
La seconda proprieta in (2.3.6) si puo esprimere in maniera equivalentecome segue
∀ ε ∈ R∗+ ∃ x ∈ X t.c. ℓ−ε < x (rispettivamente, x < ℓ+ε ). (2.3.7)
Una proprieta notevole dei sottoinsiemi di R e la seguente.
Proposizione 2.3.1 (Seconda forma dell’assioma di completezza)Ogni sottoinsieme non vuoto limitato superiormente (rispettivamente, limi-tato inferiormente) di R e dotato (in R) di estremo superiore (rispettiva-mente, di estremo inferiore).
Si riconosce facilmente che la seconda forma dell’assioma di completezzae equivalente all’assioma di completezza. Infatti si supponga che valga laProposizione 2.2.1 e sia X un sottoinsieme non vuoto e limitato superior-mente di R. Allora l’insieme M dei maggioranti di X e non vuoto e inoltreX ed M sono ovviamente separati. Dalla Proposizione 2.2.1 esiste un ele-mento separatore ℓ ∈ R di X ed M e quindi risulta, per ogni x ∈ X e perogni m ∈M , x ≤ ℓ ≤ m; dalla prima di tali diseguaglianze segue che ℓ e unmaggiorante di X e dalla seconda che ℓ e il piu piccolo maggiorante di X.Quindi ℓ = supX.
Si supponga ora che valga la seconda forma dell’assioma di completezzae siano A e B sottoinsiemi non vuoti e separati di R per i quali si abbia, perogni a ∈ A e per ogni b ∈ B, a ≤ b. Allora A e limitato superiormente inquanto ogni elemento di B e un maggiorante di A. Dalla Proposizione 2.3.1si puo considerare ℓ = supA. Quindi per ogni a ∈ A risulta a ≤ ℓ in quantoℓ e un maggiorante di A; inoltre ogni elemento b ∈ B e un maggiorantedi A e quindi deve essere, per definizione di estremo superiore, ℓ ≤ b. Siconclude che ℓ e un elemento separatore di A e B e quindi vale l’assioma dicompletezza enunciato nella Proposizione 2.2.1.
Nel caso in cui un insieme non sia limitato superiormente (rispettivamen-te, inferiormente), esso non e dotato di estremo superiore (rispettivamente,inferiore); in tal caso, si scrivera per convenzione
supX = +∞ , (rispettivamente, infX = −∞ ). (2.3.8)

50 Capitolo 2: Cenni sugli insiemi numerici
2.3.5 Intorni e punti di accumulazione
Ogni sottoinsieme I di R contenente un intervallo centrato di centro x0
viene denominato intorno di x0; analogamente, ogni sottoinsieme I di Rper cui esista δ ∈ R∗
+ tale che I+δ (x0) ⊂ I (rispettivamente, I−δ (x0) ⊂ I)viene denominato intorno destro (rispettivamente, intorno sinistro) di x0.
L’insieme degli intorni di x0 viene denotato con il simbolo I(x0); inoltre,l’insieme degli intorni destri (rispettivamente, sinistri) di x0 viene denotatocon I+(x0) (rispettivamente, I−(x0)).
Per convenzione, inoltre, si denominera intorno di +∞ (rispettivamente,di −∞) ogni sottoinsieme di R contenente un intervallo illimitato a destra(rispettivamente, a sinistra) ed il loro insieme verra denotato con I(+∞)(rispettivamente, I(−∞)).
Infine, si dice che x0 ∈ R∪ −∞,+∞ e un punto di accumulazione perun sottoinsieme X di R se, per ogni intorno I di x0,
X ∩ I " x0 = ∅ (2.3.9)
(quindi, in ogni intorno di x0 vi sono elementi di X diversi da x0). Se x0 ∈ Re la condizione precedente e verificata per ogni intorno destro (rispettiva-mente, sinistro) di x0, si dice che x0 e un punto di accumulazione a destra(rispettivamente, a sinistra) per X.
2.3.6 La retta ampliata dei numeri reali
Per semplificare l’esposizione di alcuni argomenti, puo essere utile introdurrel’insieme
R = R ∪ −∞,+∞ , (2.3.10)
dove −∞ e +∞ sono due oggetti distinti non appartenenti ad R. Taleinsieme viene denominato insieme ampliato dei numeri reali oppure piubrevemente R ampliato. Per denotarlo, possono essere usati anche i simboli:R oppure R.
I concetti di intorno e di punto di accumulazione possono essere estesianche in R.
Precisamente un intorno di +∞ (rispettivamente, di −∞) viene intesocome un sottoinsieme I di R che contiene un intervallo illimitato a destra(rispettivamente, a sinistra):
∃ c ∈ R t.c. ]c,+∞[⊂ I , (rispettivamente, ∃ c ∈ R t.c. ]−∞, c[⊂ I ).
L’insieme degli intorni di +∞ (rispettivamente, di −∞) viene denotatocon il simbolo I(+∞) (rispettivamente, I(−∞)).

2.3 Proprieta dei sottoinsiemi di R 51
In questo caso non ha senso considerare intorni destri e sinistri di +∞o di −∞.
Infine, si dice che +∞ (rispettivamente, −∞) e un punto di accumulazio-ne per un sottoinsiemeX di R se, per ogni intorno I di +∞ (rispettivamente,−∞), risulta X ∩ I = ∅ (in questo caso i punti +∞ e −∞ sicuramente nonappartengono ad X ∩ I in quanto tale intersezione e un sottoinsieme di R).
Quindi +∞ (rispettivamente, −∞) e un punto di accumulazione per Xse e solo se
∀ c ∈ R : X∩]c,+∞[ = ∅ , (rispettivamente, ∀ c ∈ R : X∩]−∞, c[ = ∅ )
e quest’ultima condizione equivale al fatto che X non e dotato di maggio-ranti (rispettivamente, di minoranti) e quindi al fatto che X non e limitatosuperiormente in R (rispettivamente, non e limitato inferiormente in R).

Capitolo 3
Numeri complessi epolinomi
3.1 Proprieta generali dei numeri complessi
Nell’insieme dei numeri reali R non e possibile risolvere tutte le equazionialgebriche; ad esempio, l’equazione x2 +1 = 0 non ammette alcuna soluzio-ne reale. L’insieme dei numeri complessi permettera di risolvere in mododefinitivo tale problema nel senso che, in tale insieme, tutte le equazionialgebriche ammetteranno almeno una soluzione. Tuttavia in tale estensionesi perdono alcune proprieta importanti di R, come quelle relative alla re-lazione d’ordine: nell’insieme dei numeri complessi non e possibile definireuna relazione d’ordine totale compatibile con le operazioni algebriche.
Partendo proprio dall’equazione x2+1 = 0, se si vuole che essa ammettaalmeno una soluzione, bisogna ammettere l’esistenza di un elemento il cuiquadrato sia −1. Tale elemento, che non puo essere un numero reale inquanto i quadrati dei numeri reali sono sempre positivi, verra denotato con ie verra denominato unita immaginaria. Quindi il ‘numero’ i e caratterizzatodalla proprieta:
i2 = −1 . (3.1.1)
Assunta l’esistenza del numero i, anche l’equazione piu generale x2+ b2 = 0(b ∈ R) ammettera le soluzioni i · b e −i · b; piu in generale, le equazioni disecondo grado della forma (x − a)2 + b2 = 0, con a, b ∈ R ammetterannole soluzioni a± i · b (si puo riconoscere facilmente che tutte le equazioni disecondo grado con discriminante ∆ < 0 si possono scrivere in tale forma).Tuttavia, bisogna tener presente che le operazioni di addizione e moltiplica-zione utilizzate nel simbolo a+ i · b non sono state compiutamente definite

54 Capitolo 3: Numeri complessi e polinomi
ma presuppongono un’estensione delle proprieta algebriche dei numeri rea-li. Per rendere piu precisa tale estensione, conviene innanzitutto osservareche tali numeri sono caratterizzati dalla coppia (a, b) di numeri reali. Inquesto modo, e possibile trasferire lo studio di tali operazioni algebrichenell’insieme gia noto R2. In R2 l’addizione viene definita ponendo, per ogni(a, b) ∈ R2, (c, d) ∈ R2,
(a, b) + (c, d) = (a+ c, b+ d) . (3.1.2)
Tale addizione verifica le proprieta associativa e commutativa, e inoltre l’e-lemento neutro 0 e dato dalla coppia (0,0); infine, per ogni (a, b) ∈ R2,l’opposto di (a, b), che si denota con −(a, b), e la coppia (−a,−b).
La moltiplicazione di R2 viene invece definita nel seguente modo, perogni (a, b) ∈ R2, (c, d) ∈ R2,
(a, b) · (c, d) = (a · c− b · d, a · d+ b · c) (3.1.3)
Anche per la moltiplicazione e facile riconoscere la validita delle proprieta as-sociativa e commutativa, l’esistenza dell’elemento neutro 1 dato dalla coppia(1,0) e, per ogni (a, b) = (0, 0), l’esistenza dell’elemento inverso (reciproco
di (a, b)) che si denota con (a, b)−1 oppure con1
(a, b), ed e dato dalla coppia
(a
a2 + b2,−b
a2 + b2
)
L’insieme R2, munito dell’addizione e della moltiplicazione definite ri-spettivamente dalla (3.1.2) e dalla (3.1.3) viene denominato insieme deinumeri complessi e denotato con il simbolo C.
Se z = (a, b) ∈ C, il numero (reale) a viene denominato parte reale diz e denotato con Re z, mentre il numero (reale) b viene denominato parteimmaginaria di z e denotato con il simbolo Im z. In questo modo un numerocomplesso z puo essere rappresentato come z = (Re z, Im z). La coppia(Re z, Im z) viene anche denominata forma geometrica di z.
Partendo da una discussione riguardante la possibilita di ottenere dellesoluzioni di opportune equazioni algebriche, si e cosı giunti ad introdurrel’insieme C, i cui elementi sono stati individuati mediante coppie di numerireali. In tale corrispondenza, l’unita immaginaria i e rappresentata ovvia-mente dalla coppia (0,1). Inoltre un numero reale a e rappresentato dallacoppia (a, 0); in questo senso l’insieme R dei numeri reali puo essere con-siderato come un sottoinsieme di C, in quanto puo essere identificato conil sottoinsieme di C costituito da tutti gli elementi di C aventi parte im-maginaria nulla. Tenendo presente tale identificazione, si ottiene, per ogni
3.1 Proprieta generali dei numeri complessi 55
(a, b) ∈ C,
(a, b) = (a, 0) + (0, b) = (a, 0) + (0, 1) · (b, 0) = (a, 0) + i · (b, 0) = a+ i · b ;
si ottiene cosı un’espressione diversa del numero complesso z, detta formaalgebrica di z.
La forma geometrica dei numeri complessi rende possibile la loro rappre-sentazione come elementi di un piano, sul quale sia stato fissato un sistemadi assi cartesiani; in tal caso si preferisce parlare di piano complesso anzichedi piano cartesiano e di asse reale e asse immaginario anziche di asse delleascisse e rispettivamente delle ordinate; tale denominazione e giustificatadal fatto che tutti e soli i numeri reali considerati come numeri complessiaventi parte immaginaria nulla vengono cosı a trovarsi sull’asse reale, men-tre tutti e soli i numeri complessi aventi parte reale nulla vengono a trovarsisull’asse immaginario (gli elementi dell’asse immaginario vengono anche perquesto denominati spesso numeri immaginari puri). L’unita di C rappre-senta l’unita sull’asse reale mentre l’unita immaginaria rappresenta l’unitasull’asse immaginario. Naturalmente, anziche parlare di ascissa ed ordinatadi un numero complesso si preferisce utilizzare le definizioni gia introdottedi parte reale e di parte immaginaria.
La possibilita di considerare diverse forme di un numero complesso eutile in quanto il grado di difficolta nello svolgere le varie operazioni inC dipende spesso dalla forma che si sta adoperando. Inoltre, e chiara lapossibilita di passare in modo immediato dalla forma algebrica a quellageometrica e viceversa. Si e gia visto, ad esempio, che l’unita immaginariai si scrive (0,1) in forma geometrica; come ulteriore esempio, si osserva chel’elemento nullo 0 corrisponde alla coppia (0,0) e l’elemento unita 1 allacoppia (1,0). Si riconsiderano ora le operazioni descritte sopra utilizzandola forma algebrica. Siano z = a+ ib e w = c+ id elementi di C. Allora
(a+ ib) + (c+ id) = (a+ c) + i(b+ d) ,
(a+ ib) · (c+ id) = (ac− bd) + i(ad+ bc)
e quindi l’addizione e la moltiplicazione in forma algebrica seguono le regoleclassiche della somma e del prodotto di due binomi. Inoltre, −z = −a+i(−b)e, se z = 0,
z−1 =a
a2 + b2− i
b
a2 + b2.
Conviene tenere presente, inoltre, che calcolando le potenze dell’unitaimmaginaria i, si ottiene
i0 = 1 , i1 = i , i2 = −1 , i3 = i2 · i = −i , i4 = i2 · i2 = 1 , . . . ;

56 Capitolo 3: Numeri complessi e polinomi
come si vede, le potenze di i si ripetono di quattro in quattro, cioe vale laproprieta ip+4 = ip per ogni p ∈ N.
Due numeri complessi in forma algebrica o geometrica coincidono se esolo se coincidono sia le loro parti reali che le loro parti immaginarie.
Si e visto nelle considerazioni iniziali che le soluzioni delle equazioni disecondo grado a coefficienti reali sono del tipo a ± ib; assegnato, quindi,un numero complesso z = a + ib, ha un ruolo sicuramente importante ilnumero complesso w = a − ib, che ha la stessa parte reale di z, ma parteimmaginaria opposta; esso viene denominato numero complesso coniugatodi z e denotato con il simbolo z.
Infine, come si vede dal calcolo del reciproco di un numero complessodiverso da 0, e anche utile definire, per ogni numero complesso z = a + ib,il numero reale
√a2 + b2, il quale prende il nome di modulo di z e viene
denotato con il simbolo |z| (l’uso dello stesso simbolo che rappresenta ilvalore assoluto di un numero reale non da luogo ad equivoci in quanto, sesi considera un numero reale a ∈ R come numero complesso della formaz = a+ i · 0, si ha |z| =
√a2 + 02 =
√a2 = |a|).
Nel piano complesso, il coniugato di un numero complesso z e il simme-trico di z rispetto all’asse reale mentre il modulo rappresenta la distanza diz dall’origine.
Seguono ora alcune proprieta del coniugato e del modulo di un numerocomplesso.
Proposizione 3.1.1 Per ogni z = a+ ib ∈ C e w = c+ id ∈ C, valgono leseguenti proprieta:
1. z + w = z + w , z · w = z · w .
2. z = z .
3. z + z = 2Re z , z − z = 2 Im z .
4. z · z = |z|2 .
5. |− z| = |z| .
6. |z| = |z| .
7. Re z ≤ |z| , Im z ≤ |z| .
8. |z · w| = |z| · |w| .
9. Se z = 0, allora |z−1| = |z|−1 .
10. |z + w| ≤ |z|+ |w|; .
3.2 Richiami di trigonometria e coordinate polari 57
11. ||z|− |w|| ≤ |z − w| .
Le proprieta precedenti possono tutte essere verificate direttamente usan-do le definizioni adottate.
E opportuno osservare che non si puo considerare in C una relazioned’ordine totale (in cui cioe due qualsiasi elemento siano confrontabili) com-patibile con le operazioni algebriche. Infatti, se una tale relazione d’ordine≤ esistesse, si avrebbe z > 0 oppure z < 0 per ogni z ∈ C∗ e quindi, dal-la compatibilita con le operazioni algebriche, z2 > 0 per ogni z ∈ C∗; inparticolare −1 = i2 > 0, da cui una contraddizione.
Si considerano ora altre forme in cui possono essere espressi i numericomplessi. E necessario, per questo, un sistema diverso di coordinate nelpiano cartesiano, che richiede alcune nozioni di trigonometria. Si premet-tono pertanto alcune nozioni elementari di trigonometria e sul sistema dicoordinate polari.
3.2 Richiami di trigonometria e coordinate po-lari
Si richiama innanzitutto il concetto di circonferenza trigonometrica, chee da intendersi come una circonferenza nel piano cartesiano avente centronell’origine degli assi e raggio uguale ad uno; tale circonferenza inoltre vienedotata di un verso positivo che per convenzione e quello antiorario e diun punto iniziale, che per convenzione e il punto A di intersezione di talecirconferenza con il semiasse positivo delle ascisse (vedasi la Figura 3.1).
Inoltre, si assume per convenzione di denotare con il numero π la lun-ghezza della semicirconferenza unitaria (risulta all’incirca π = 3, 1415 . . . ;si dimostra, pero, che π e un numero irrazionale uguale anche all’area delcerchio unitario). Il fatto di aver fissato un punto iniziale, un verso sullacirconferenza trigonometrica ed un’unita di misura permette di far corri-spondere ad ogni numero reale un elemento della circonferenza trigonome-trica. Precisamente, assegnato un numero reale x, si puo considerare l’arcodi circonferenza che ha un estremo nel punto iniziale A, lunghezza ugualeal valore assoluto di x e verso antiorario se x e positivo, altrimenti orario.Si puo quindi individuare il punto P sulla circonferenza trigonometrica cherappresenta il secondo estremo dell’arco suddetto (se il numero reale asse-gnato e maggiore di 2π in valore assoluto, la circonferenza trigonometricaviene ripercorsa piu volte). Ora, assegnato il numero reale x, si consideri ilpunto P sulla circonferenza trigonometrica costruito come descritto sopra.
Si definisce seno di x, e lo si denota con sin(x), l’ordinata del puntoP , mentre si definisce coseno di x, e lo si denota con cos(x), l’ascissa del

58 Capitolo 3: Numeri complessi e polinomi
0 A
x
1
P
cos(x)
sin(x)
.
..........................
..........................
..........................
...........................
..........................
..........................
.........................
........................
.................................................
....................................................
............................................................................................................................................................................................................................................
...................................................
........................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..............
............
..............
............
..........................
..........................
...........................
..........................
..........................
.........................
........................
........................
.........................
.......................... .......................... ........................... .......................... .......................... .......................... .......................... .......................... ..........................................................................................................................................................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..........................
.
......................
......................
......................
......................
......................
.....................
Figura 3.1: Circonferenza trigonometrica.
punto P ; se non vi e possibilita di equivoci, le parentesi che racchiudono lax vengono omesse e si scrive semplicemente sinx e cosx.
Dalle definizioni adottate segue subito che, per ogni x ∈ R
−1 ≤ sinx ≤ 1 , −1 ≤ cosx ≤ 1 .
In particolare, quindi, le funzioni seno e coseno sono limitate. Inoltre, uti-lizzando il teorema di Pitagora, si ricava la seguente relazione tra il seno edil coseno, valida anch’essa per ogni x ∈ R,
sin2 x+ cos2 x = 1
(il simbolo sin2 x e da intendersi come (sinx)2; la stessa convenzione valeper il coseno e, piu in generale, per tutte le quantita trigonometriche).
Si descrivono ora alcune proprieta del seno e del coseno di un qualsiasinumero reale x la cui dimostrazione e una immediata conseguenza delledefinizioni adottate.

3.2 Richiami di trigonometria e coordinate polari 59
1. Per ogni x ∈ R: sin(x+ 2π) = sinx , cos(x+ 2π) = cosx .
Tale relazione esprime la proprieta di periodicita di periodo 2π delseno e del coseno.
2. Per ogni x ∈ R: sin(x+
π
2
)= cosx , cos
(x+
π
2
)= − sinx .
3. Per ogni x ∈ R: sin(π2− x)= cosx , cos
(π2− x)= sinx .
4. Per ogni x ∈ R: sin(x+ π) = − sinx , cos(x+ π) = − cosx .
Le proprieta precedenti conseguono tutte dalle seguenti formule di ad-dizione del seno e del coseno. La dimostrazione di tali formule per brevitaverra omessa. Per ogni x, y ∈ R, si ha
5. sin(x+ y) = sinx cos y + cosx sin y .
6. sin(x− y) = sinx cos y − cosx sin y .
7. cos(x+ y) = cosx cos y − sinx sin y .
8. cos(x− y) = cosx cos y + sinx sin y .
Considerando, in particolare, x = y nelle proprieta 5. e 7. precedentisi ottengono le seguenti ulteriori formule, note con il nome di formule dimoltiplicazione.
9. Per ogni x ∈ R: sin 2x = 2 sinx cosx .
10. Per ogni x ∈ R: cos 2x = cos2 x− sin2 x = 2 cos2 x− 1 = 1− 2 sin2 x .
Considerando x/2 al posto di x nell’ultima uguaglianza, si ottiene cosx =2 cos2(x/2)− 1, dalla quale si ottengono le seguenti formule di bisezione.
11. Per ogni x ∈ R: cos2 x
2=
1 + cosx
2.
12. Per ogni x ∈ R: sin2 x
2=
1− cosx
2.
Infine, addizionando e sottraendo a due a due le 5.–6. e le 7.–8., siottengono le cosiddette formule di prostaferesi, che consentono di esprimereil prodotto seni e/o coseni nella somma di seni e/o coseni.
13. Per ogni x, y ∈ R: sin(x+ y) + sin(x− y) = 2 sinx cos y .
14. Per ogni x, y ∈ R: sin(x+ y)− sin(x− y) = 2 cosx sin y .

60 Capitolo 3: Numeri complessi e polinomi
15. Per ogni x, y ∈ R: cos(x+ y) + cos(x− y) = 2 cosx cos y .
16. Per ogni x, y ∈ R: cos(x+ y)− cos(x− y) = −2 sinx sin y .
Le formule precedenti possono essere scritte in forma diversa ponendox = (α+ β)/2 e y = (α− β)/2; se ne lascia per esercizio la trascrizione contali posizioni.
Si passa ora ad elencare alcuni valori del seno e del coseno in alcuni archiparticolari che si possono dedurre facilmente da proprieta geometriche sullacirconferenza trigonometrica.
sin 0 = 0 , cos 0 = 1 .
sinπ
6=
1
2, cos
π
6=
√3
2.
sinπ
4=
√2
2, cos
π
4=
√2
2.
sinπ
3=
√3
2, cos
π
3=
1
2.
sinπ
2= 1 , cos
π
2= 0 .
Utilizzando le proprieta 1.–4, dagli archi noti precedenti possono essernericavati altri come, ad esempio,
3
4π ,
5
6π , π ,
7
6π ,
5
4π ,
4
3π ,
3
2π ,
5
3π ,
7
4π ,
11
6π .
Usando poi la proprieta di periodicita del seno e del coseno si ricavano archinoti non appartenenti a [0, 2π[.
A questo punto si possono definire ulteriori nozioni trigonometriche.Sia x ∈ R, x = π/2 + kπ per ogni k ∈ Z e si consideri il corrispondente
punto P sulla circonferenza trigonometrica. Poiche P non si trova sull’assedelle ordinate, la semiretta passante per l’origine e il punto P interseca laretta parallela all’asse delle ordinate passante per il punto A di coordinate(1, 0) in uno ed un solo punto Q. Allora la tangente di x si definisce comel’ordinata di tale punto Q.
Utilizzando la similitudine dei triangoli di vertici OBP e OAQ rappre-sentati in Figura 3.2, si deduce facilmente la relazione sinx : tanx =cosx : 1, dalla quale si ricava
tanx =sinx
cosx.

3.2 Richiami di trigonometria e coordinate polari 61
O AB
x
1
PQ
tan(x)
.
..........................
..........................
..........................
...........................
..........................
..........................
.........................
........................
.................................................
....................................................
............................................................................................................................................................................................................................................
...................................................
........................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..............
............
..............
............
..........................
..........................
...........................
..........................
..........................
.........................
........................
........................
.........................
.......................... .......................... ........................... .......................... .......................... .......................... .......................... .......................... ..........................................................................................................................................................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..........................
.
......................
......................
......................
......................
......................
.....................
Figura 3.2: Interpretazione geometrica della tangente.
Le proprieta della tangente derivano pertanto da quelle del seno e delcoseno.
Ad esempio, per ogni x ∈ R"π/2+kπ | k ∈ Z, si ottiene tan(x+π) =tan(x) = tan(x− π), e quindi la tangente e periodica di periodo π. Inoltre,
tan(−x) = sin(−x)cos(−x) =
− sinx
cosx= − tanx.
Nello stesso modo e possibile ricavare i valori della tangente in alcuniarchi particolari.
In modo analogo a quanto visto per la tangente, si puo procedere con-siderando x ∈ R tale che x = kπ per ogni k ∈ Z e considerando ancora ilpunto P corrispondente sulla circonferenza trigonometrica. Allora P nonsi trova sull’asse delle ascisse e quindi la semiretta passante per l’origine eil punto P interseca la retta parallela all’asse delle ascisse passante per ilpunto C di coordinate (0, 1) in uno ed un solo punto Q. Allora la cotangentedi x si definisce come l’ascissa di tale punto Q.
Anche ora, utilizzando la similitudine dei triangoli di vertici OBP e

62 Capitolo 3: Numeri complessi e polinomi
OCQ rappresentati in Figura 3.3, si deduce facilmente la relazione sinx :1 = cosx : cotx, dalla quale si ricava
cotx =cosx
sinx.
O A
B
x
1
P
QC cot(x)
.
..........................
..........................
..........................
...........................
..........................
..........................
.........................
........................
.................................................
....................................................
............................................................................................................................................................................................................................................
...................................................
........................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..............
............
..............
............
..........................
..........................
...........................
..........................
..........................
.........................
........................
........................
.........................
.......................... .......................... ........................... .......................... .......................... .......................... .......................... .......................... ..........................................................................................................................................................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..........................
.
......................
......................
......................
......................
......................
.....................
Figura 3.3: Interpretazione geometrica della cotangente.
Le proprieta della cotangente si discutono in maniera analoga a quantosvolto per la tangente e dipendono ancora una volta da quelle delle funzioniseno e coseno.
Si richiama solamente l’attenzione sul fatto che la cotangente e anch’essaperiodica di periodo π, ma non verifica proprieta di simmetria.
3.2.1 Coordinate polari
Si e visto in precedenza che gli elementi di un piano rappresentano geome-tricamente gli elementi di R2; ora se ne studia una diversa rappresentazione,utile soprattutto in questa fase per poter esprimere i numeri complessi inuna forma alternativa.

3.2 Richiami di trigonometria e coordinate polari 63
Sia assegnato un piano π e si fissi su di esso un riferimento cartesiano or-tonormale; quindi ogni elemento P ∈ π puo essere univocamente individuatomediante una coppia (x, y). Si osservi ora che se il punto P non coincide conl’origine, esso puo essere individuato in modo alternativo assegnando la suadistanza ρ dall’origine e l’arco di circonferenza unitaria θ compreso tra ilsemiasse positivo dell’asse reale e la semiretta uscente dall’origine e passanteper P . Gli elementi ρ e θ cosı definiti vengono denominati coordinate polaridel punto P . Il numero ρ viene denominato modulo (oppure raggio vettore)di P , mentre il numero θ viene denominato argomento (oppure anomalia)di P . Bisogna osservare che l’argomento non e individuato univocamente;infatti se θ e un argomento di P , ogni altro numero del tipo θ + 2kπ conk ∈ Z, e ancora un argomento di P . Tuttavia, esiste sicuramente uno ed unsolo argomento θ di P che verifica le condizioni −π < θ ≤ π; tale argomentoviene denominato argomento principale di P . Per quanto riguarda l’origine,essa e individuata univocamente dalla condizione ρ = 0; per convenzione,all’origine si puo attribuire un argomento arbitrario. Se si conoscono lecoordinate cartesiane (x, y) di un punto P diverso dall’origine, il modulo ρdi P si ottiene dalla formula
ρ =√x2 + y2 , (3.2.1)
mentre un argomento θ di P puo essere individuato dalle condizioni
cos θ =x
ρ, sin θ =
y
ρ; (3.2.2)
in particolare, se x = 0, l’argomento principale e
θ =
π/2 , se y > 0 ,
−π/2 , se y < 0 ;
se invece x = 0, l’argomento principale e
θ =
⎧⎪⎪⎨
⎪⎪⎩
arctan yx , se x > 0 ,
π + arctan yx , se x < 0, y ≥ 0 ,
−π + arctan yx , se x < 0, y < 0 .
Viceversa, se sono note le coordinate polari (ρ, θ) di P , si possonoricavare facilmente le coordinate cartesiane di P ponendo
x = ρ cos θ ,
y = ρ sin θ ,(3.2.3)

64 Capitolo 3: Numeri complessi e polinomi
|
|
|
|
|− − − − − − − − − − − − −
•
0
P
x
y
ρ
θ
.
........................
........................
.........................
.........................
........................
........................
Figura 3.4: Coordinate polari.
3.3 Forma trigonometrica dei numeri comples-si
La forma trigonometrica di un numero complesso z si ottiene semplice-mente considerando le coordinate polari del punto P del piano complessocorrispondente a z.
Sia z = a+ ib ∈ C; essendo (a, b) la forma geometrica di z, le coordinatepolari si possono ottenere dalle (3.2.1)–(3.2.2) ponendo ρ =
√a2 + b2 e
considerando θ soddisfacente le relazioni cos θ = x/ρ e sin θ = y/ρ; tenendopresenti le (3.2.3), il numero z si potra quindi scrivere nella forma
z = ρ(cos θ + i sin θ) , (3.3.1)
che viene appunto denominata forma trigonometrica di z. Ad esempio,1 = cos 0 + i sin 0, −1 = cosπ + i sinπ, i = cos(π/2) + i sin(π/2), 1 + i =√2(cos(π/4) + i sin(π/4)).Dalle considerazioni svolte riguardanti le coordinate polari, si ricava che
la forma trigonometrica di z non e univocamente determinata; gli argomen-ti di z sono del tipo θ + 2kπ con k ∈ Z; in particolare, il numero 0 hamodulo 0 e argomento arbitrario. Tuttavia, l’argomento di un numero com-plesso diverso da 0 risulta univocamente determinato se si considera quelloprincipale compreso nell’intervallo ]−π,π]. Come conseguenza di cio, si ot-tiene il seguente principio di uguaglianza di due numeri complessi in formatrigonometrica.
3.3 Forma trigonometrica dei numeri complessi 65
Proposizione 3.3.1 Siano z = ρ(cos θ + i sin θ) e w = σ(cosϕ + i sinϕ)due numeri complessi in forma trigonometrica diversi da 0. Si ha z = w see solo se ρ = σ ed esiste k ∈ Z tale che θ = ϕ+ 2kπ.
Inoltre, se θ e l’argomento principale di z e ϕ e l’argomento principaledi w, si ha z = w se e solo se ρ = σ e θ = ϕ.
Si studiano a questo punto le varie operazioni algebriche in forma tri-gonometrica. Le operazioni di somma e differenza di due numeri complessinon sono immediate in forma trigonometrica e per tali operazioni convieneutilizzare soprattutto la forma algebrica o geometrica. Al contrario, si favedere ora che le operazioni di prodotto, reciproco, quoziente, potenza eradice si possono eseguire in modo molto semplice utilizzando proprio laforma trigonometrica.
Siano, infatti, z = ρ(cos θ + i sin θ) e w = σ(cosϕ + i sinϕ) due numericomplessi. Poiche la forma algebrica di z e w e data da z = (ρ cos θ) +i(ρ sin θ), w = (σ cosϕ) + i(σ sinϕ) il prodotto z · w e dato da
z · w = ρ · σ((cos θ cosϕ− sin θ sinϕ) + i(cos θ sinϕ+ sin θ cosϕ))
= ρ · σ(cos(θ + ϕ) + i sin(θ + ϕ)) .
Quindi si conclude che il prodotto in forma trigonometrica di due numericomplessi z e w ha come modulo il prodotto dei moduli di z e di w e comeargomento la somma degli argomenti di z e di w:
z · w = ρ · σ(cos(θ + ϕ) + i sin(θ + ϕ)) . (3.3.2)
Tuttavia, in generale, conviene tener presente che se θ e ϕ sono gli argo-menti principali di z e rispettivamente di w, non e detto che θ + ϕ sia l’ar-gomento principale di z ·w; per ottenerlo, potrebbe infatti essere necessarioaggiungere o sottrarre 2π.
Sia ora z = ρ(cos θ+i sin θ) un numero complesso diverso da 0; si verificafacilmente che il reciproco di z e dato da
z−1 = ρ−1(cos(−θ) + i sin(−θ)) (3.3.3)
Pertanto, il reciproco di un numero complesso diverso da 0 ha come moduloil reciproco del modulo di z e come argomento quello opposto all’argomentodi z.
Da tale regola, si ricava anche la regola sul quoziente di due numericomplessi. Infatti, se z = ρ(cos θ + i sin θ) e w = σ(cosϕ + i sinϕ) conw = 0, allora, dalle (3.3.2) e (3.3.3),
z
w= z · w−1 =
ρ
σ(cos(θ − ϕ) + i sin(θ − ϕ)) . (3.3.4)

66 Capitolo 3: Numeri complessi e polinomi
Si conclude che il quoziente di z e w ha come modulo il quoziente dei modulidi z e di w e come argomento la differenza degli argomenti di z e di w
Come conseguenza della regola sul prodotto, si ottiene facilmente anche ilcalcolo delle potenze di un numero complesso z = ρ(cos θ+i sin θ). Ponendow = z nella (3.3.2) si ha infatti z2 = ρ2(cos(2θ)+i sin(2θ)) e piu in generale,procedendo per induzione, per ogni n ≥ 1,
zn = ρn(cos(nθ) + i sin(nθ)) . (3.3.5)
La formula (3.3.5) precedente viene denominata formula di De Moivre.Viene considerato infine, il calcolo delle radici n-esime (n ≥ 2) di un
numero complesso z = ρ(cos θ + i sin θ). Una radice di z e definita comeun numero complesso w ∈ C che verifica la proprieta wn = z. Si riconoscein modo immediato che l’unica radice di 0 e il numero 0. Si suppongaquindi che z = 0. Se si pone w = σ(cosϕ + i sinϕ), dalla (3.3.5) si ricavawn = σn(cos(nϕ) + i sin(nϕ)), e quindi, imponendo l’uguaglianza wn = z,dal principio di uguaglianza di due numeri complessi in forma trigonometrica(Proposizione 3.3.1) segue:
ρ = σn , nϕ = θ + 2kπ con k ∈ Z;
quindi σ = n√ρ e ϕ =
θ + 2kπ
n, con k ∈ Z; si osserva a questo punto che, al
variare di k ∈ Z, gli argomenti ϕ =θ + 2kπ
nnon danno tutti luogo a numeri
complessi distinti, in quanto, per ogni k ∈ Z,
θ + 2(k + n)π
n=θ + 2kπ
n+ 2π ;
quindi si possono considerare solo n argomenti distinti corrispondenti aivalori k = 0, . . . , n − 1 e tali argomenti forniscono tutte le possibili radicin-esime di z, che sono date quindi da:
wk = n√ρ (cos
θ + 2kπ
n+ i sin
θ + 2kπ
n) , k = 0, 1, . . . , n− 1 . (3.3.6)
Quindi ogni numero complesso z diverso da 0 ammette esattamente nradici distinte. Dalla formula precedente, si ricava che le radici n-esime di zsi trovano tutte su una stessa circonferenza con centro nell’origine e raggiouguale alla radice n-esima del modulo di z e formano i vertici di un poligonoregolare con n lati (geometricamente, quindi, e sufficiente individuare unodei vertici che ha argomento uguale alla n-esima parte dell’argomento di z).
Nella Figura 3.5 si rappresenta un esempio di radici terze e quinte di unnumero complesso z.

3.4 Forma esponenziale dei numeri complessi 67
0.
.......................
.......................
........................
.......................
.......................
......................
......................
.......................
...............................................
.......................................................................................................................................
....
.......................
......................
......................
.......................
.......................
........................
.......................
.........
.........
.....
.........
.........
.....
.......................
........................
.......................
.......................
......................
......................
.......................
.......................
........................ ....................... ....................... ....................... ...............................................
.......................
.......................
......................
......................
.......................
.......................
........................
.......................
.......................
!
!!
! !
•z
0.
.......................
.......................
........................
.......................
.......................
......................
......................
.......................
...............................................
.......................................................................................................................................
....
.......................
......................
......................
.......................
.......................
........................
.......................
.........
.........
.....
.........
.........
.....
.......................
........................
.......................
.......................
......................
......................
.......................
.......................
........................ ....................... ....................... ....................... ...............................................
.......................
.......................
......................
......................
.......................
.......................
........................
.......................
.......................
!!
!
•z
Figura 3.5: Radici terze e quinte di un numero complesso.
Dalla 3.3.6 e facile constatare che le radici quadrate di un numero com-plesso sono l’una l’opposta dell’altra (in quanto i loro argomenti differisconodi π); in particolare, le due radici complesse di un numero reale positivo sonouna reale positiva (che coincide con la radice quadrata aritmetica) e l’altrareale negativa (l’opposta della prima); se, invece, si considera un numero rea-le strettamente negativo, le due radici complesse saranno immaginarie purel’una l’opposta dell’altra). Per quanto riguarda le radici terze complesse diun numero reale, si puo osservare che esse sono una reale (coincidente conla radice terza aritmetica) e due tra loro complesse coniugate.
3.4 Forma esponenziale dei numeri complessi
Se z = x+ iy e un numero complesso, si pone innanzitutto
ez = ex(cos y + i sin y) ; (3.4.1)
si osservi che x, y ∈ R e quindi le funzioni a secondo membro sono quellegia note nel caso reale. In particolare, se θ ∈ R, si ha
ei θ = cos θ + i sin θ ; (3.4.2)
conseguentemente, se si conosce la forma trigonometrica z = ρ(cos θ+i sin θ)di un numero complesso z si puo scrivere
z = ρei θ . (3.4.3)

68 Capitolo 3: Numeri complessi e polinomi
La (3.4.3) viene denominata forma esponenziale di z. Dalla forma espo-nenziale e anche immediato passare alla forma trigonometrica e viceversautilizzando la (3.4.2). Inoltre, dalle (3.4.1) e (3.4.2) si ottengono facilmentele seguenti proprieta di ez, che valgono per ogni z, w ∈ C e θ ∈ R.
1. ez+w = ez · ew ;
2. ez = 0 ;
3. |ei θ| = 1 ;
4. ez+2kπi = ez ;
5. |ez| = eRe z ;
6. ez = eRe z(cos(Im z) + i sin(Im z)) .
Dalla (3.4.2) si ottiene anche, per ogni θ ∈ R, e−i θ = cos θ − i sin θ etale formula, unita alla (3.4.2) permette di ricavare le cosiddette formule diEulero:
sin θ =ei θ − e−i θ
2i, cos θ =
ei θ + e−i θ
2. (3.4.4)
3.5 Polinomi ed equazioni algebriche
3.5.1 Polinomi e relative radici
Le funzioni elementari che si possono considerare piu semplici dal puntodi vista del calcolo esplicito sono sicuramente le funzioni potenza ad espo-nente intero positivo. In questa sezione vengono considerate combinazionilineari di tali funzioni. Esse verranno definite in tutto l’insieme dei numericomplessi, per studiarne alcune proprieta generali; si evitera di enunciareo approfondire proprieta che, sebbene di interesse generale, non verrannoutilizzate esplicitamente nel seguito.
Definizione 3.5.1 Sia n ∈ N. Si dice polinomio di grado n ogni funzioneP : C → C per cui esistono a0, . . . , an ∈ C con an = = 0 tali che, per ogniz ∈ C,
P (z) = a0 + a1z + · · ·+ anzn . (3.5.1)
Il grado di un polinomio e, quindi, il piu grande dei numeri naturali k percui il coefficiente della potenza zk e diverso da 0. Il grado di un polinomioP viene indicato spesso con il simbolo deg(P ).
Il coefficiente a0 del termine di grado 0 di un polinomio viene spessodenominato termine noto del polinomio.
3.5 Polinomi ed equazioni algebriche 69
Si denomina zero (oppure radice, oppure soluzione) del polinomio Pogni numero complesso z0 ∈ C tale che P (z0) = 0. Nel seguito avrannoparticolare interesse i polinomi per cui i coefficienti a0, . . . , an sono numerireali. Essi verranno denominati polinomi a coefficienti reali.
Conviene osservare che se P e un polinomio a coefficienti reali allora, perogni x ∈ R, P (x) e anch’esso un numero reale; in tale circostanza, quindi,il polinomio P puo essere anche riguardato come funzione da R in R. Sarachiaro dal contesto, nel seguito, se tali polinomi vengono considerati definitiin R (come funzioni reali) oppure in C.
Si considera ora qualche esempio. In base alla definizione adottata, unpolinomio di grado 0 e una funzione costante P : C→ C di costante valoreun numero a0 ∈ C∗. Un polinomio di grado 0 ovviamente non ammettealcuna radice. Invece, la funzione costante di costante valore 0 viene deno-minata polinomio nullo; per definizione di grado di un polinomio, il gradodel polinomio nullo non puo essere zero: si assume, per convenzione, cheil grado del polinomio nullo sia -1. In effetti, il polinomio nullo e l’unicoad avere infinite radici, come afferma il seguente risultato. Quindi se unpolinomio P ammette infinite radici, allora P e il polinomio nullo. Da taleaffermazione segue il principio di identita di due polinomi, che e utile inmolte circostanze.
Proposizione 3.5.2 (Principio di identita dei polinomi) Siano P e Qdue polinomi. Se P e Q coincidono in infiniti punti, allora P = Q.
Dimostrazione. Infatti, il polinomio P −Q ammette infinite radici e quindi P −Q = 0.
#
In effetti, se n e il grado massimo dei due polinomi, e sufficiente che i duepolinomi coincidano in n + 1 punti per essere uguali (infatti, in tal caso ladifferenza dei due polinomi avrebbe un numero di zeri superiore al propriogrado e cio, come si vedra in seguito, puo valere solamente per il polinomionullo).
Dalla Proposizione 3.5.2 precedente segue anche che i coefficienti di unpolinomio sono univocamente determinati nel senso che se, per ogni z ∈ C,P (z) = a0 + a1z + · · · + anzn con an = 0 e P (z) = b0 + b1z + · · · + bmzm
con bm = 0, allora n = m e, per ogni k = 0, . . . , n, ak = bk.Riprendendo gli esempi, un polinomio di grado 1 e una funzione P :
C → C del tipo P (z) = a0 + a1z (z ∈ C), con a0 ∈ C, a1 ∈ C, a1 = 0.Un polinomio di grado 1 ammette sempre un’unica radice data da c =−a0/a1. Nel caso in cui le costanti a0 e a1 siano reali, esse vengono indicatesolitamente con n e rispettivamente m; nel piano cartesiano l’equazioney = mx+ n (x ∈ R) fornisce l’equazione della retta di coefficiente angolarem ed ordinata all’origine n. Ad esempio, il polinomio P (z) = iz + 3i− 3 eun polinomio di grado 1; la sua unica radice e data da c = −3− 3i.

70 Capitolo 3: Numeri complessi e polinomi
Un polinomio di grado 2 e del tipo P (z) = a0 + a1z + a2z2 (z ∈ C), cona0 ∈ C, a1 ∈ C, a2 ∈ C, a2 = 0. I coefficienti a0, a1 e a2 vengono indicati disolito con c, b e rispettivamente a. Nel caso in cui tali coefficienti siano reali,l’equazione di secondo grado y = ax2+ bx+ c rappresenta una parabola nelpiano cartesiano. Per determinare gli zeri di un polinomio P (z) = az2+bz+cdi grado 2 e importante il seguente numero ∆ = b2− 4ac(∈ C), denominatodiscriminante (o brevemente delta) del polinomio P (z) = az2 + bz + c.Infatti, l’equazione az2 + bz + c = 0 si puo scrivere
(z +
b
2a
)2
− ∆
4a2= 0 .
Dall’equazione precedente segue che, denotate con w1 e w2 le radici (com-plesse) del numero complesso ∆, gli zeri del polinomio P sono forniti da
z1 =−b+ w1
2a, z2 =
−b+ w2
2a
e il polinomio si puo scrivere come P (z) = a(z − z1)(z − z2). I numericomplessi w1 e w2, in quanto radici del numero complesso ∆, devono esserel’uno opposto dell’altro. Quindi, le radici z1 e z2 possono essere espressescrivendo
z1 =−b−
√∆
2a, z2 =
−b+√∆
2a,
dove ∆ denota una qualsiasi delle due radici complesse di ∆. Da cio segueche i numeri complessi z1 e z2 sono caratterizzati dalle condizioni seguenti
z1 + z2 = − b
a, z1 · z2 =
c
a.
Le radici z1 e z2 coincidono solo nel caso in ∆ = 0; se cio accade, l’unicaradice e data da z0 = −b/2a e si puo scrivere P (z) = a(z − z0)2 (si dice inquesto caso che z0 e una radice di molteplicita 2.
Se il polinomio di secondo grado e a coefficienti reali, cioe se a, b, c ∈ R,anche ∆ e un numero reale. Nel caso in cui ∆ > 0, si ha w1 =
√∆ e
w2 = −√∆ e quindi il polinomio P ammette le due radici reali distinte
x1 =−b−
√∆
2a, x2 =
−b+√∆
2a,
e si puo scrivere come P (z) = a(z − x1)(z − x2).Se ∆ = 0, P ammette un’unica radice reale data da x0 = −b/(2a) e si
ha P (z) = a(z − x0)2.

3.5 Polinomi ed equazioni algebriche 71
Infine, se ∆ < 0, le radici complesse di ∆ sono w1 = −i√−Delta e
w2 = i√−∆; quindi il polinomio P ammette due radici complesse coniugate
date da
z1 =−b− i
√−∆
2a, z2 =
−b+ i√−∆
2a.
Per i polinomi di grado 3 oppure 4 esistono delle formule esplicite perla determinazione degli zeri. Invece, per i polinomi di grado superiore a4, si dimostra che non e possibile stabilire un procedimento generale checonsenta di ottenerne gli zeri.
Si considera ora la divisione di due polinomi. Si ha innanzitutto ilseguente risultato di cui si omette per brevita la dimostrazione.
Proposizione 3.5.3 Siano P1 un polinomio di grado n e P2 un polinomionon nullo di grado m. Allora esistono, e sono unici, due polinomi Q ed Rtali che
P1 = Q · P2 +R , deg(R) < m .
Inoltre, se m ≤ n si ha deg(Q) = n −m, mentre se m > n si ha Q = 0 eR = P1.
I polinomi Q ed R previsti nella proposizione precedente vengono de-nominati rispettivamente polinomio quoziente e polinomio resto di P1 eP2.
Si osservi che se P1 e P2 sono polinomi a coefficienti reali, anche ilquoziente ed il resto lo sono. Un caso particolarmente rilevante si ottienequando il resto della divisione tra due polinomi e il polinomio nullo.
Definizione 3.5.4 Siano P1 e P2 polinomi con P2 non nullo. Si dice cheP1 e divisibile per P2 (oppure che P2 divide P1) se il polinomio resto delladivisione di P1 e P2 e il polinomio nullo e quindi se esiste un polinomio Qtale che P1 = Q · P2.
Un caso particolarmente interessante e quello in cui il polinomio P2 edel tipo P2(z) = z − z0, con z0 ∈ C. La divisione di un polinomio P con P2
deve avere come resto un polinomio di grado minore di 1, cioe deve essereR(z) = a, con a ∈ C. Inoltre, dalla relazione P (z) = Q(z) · P2(z) +R(z) =(z − z0) · Q(z) + a si ricava P (z0) = a e quindi R(z) = P (z0). Dunque,il resto della divisione di un polinomio P per il polinomio z − z0 e unpolinomio costante di costante valore P (z0). Da cio segue immediatamentela caratterizzazione della divisibilita per z − z0, con z0 ∈ C
Proposizione 3.5.5 Sia P un polinomio e sia z0 ∈ C. Allora, le seguentiproposizioni sono equivalenti:

72 Capitolo 3: Numeri complessi e polinomi
a) Il polinomio P e divisibile per z − z0.
b) z0 e una radice di P .
Quindi, se un polinomio P di grado n ≥ 1 ammette una radice z0 ∈ C,esso si decompone nel prodotto
P (z) = (z − z0)Q(z)|; , (3.5.2)
con Q polinomio di grado n− 1 in quanto il coefficiente di zn−1 di Q devecoincidere con il coefficiente di zn di P .
Uno dei piu importanti risultati riguardanti i polinomi e le equazionialgebriche e il fatto che i polinomi aventi grado maggiore o uguale di 1ammettono sempre almeno una radice. Per brevita, ci si limita ad enunciaresolamente tale risultato, studiandone poi qualche conseguenza.
Teorema 3.5.6 (Teorema fondamentale dell’algebra) Se P e un po-linomio di grado n ≥ 1, allora esiste z0 ∈ C tale che P (z0) = 0.
Dalla (3.5.2) si ottiene la seguente conseguenza del teorema fondamen-tale dell’algebra.
Corollario 3.5.7 Se P (z) = a0 + · · · + anzn (an = 0) e un polinomio digrado n ≥ 1, allora esistono esattamente n elementi z1, . . . , zn ∈ C tali che
P (z) = an · (z − z1) · · · (z − zn) . (3.5.3)
Dimostrazione. Si procede per induzione completa sul numero naturale n ≥ 1. Se n = 1,
si ha P (z) = a0 + a1z e la tesi si verifica direttamente. Si supponga che la tesi sia vera
per n ∈ N e che il grado di P sia n + 1, cioe P (z) = an+1zn+1 + anzn + · · · + a0,
an+1 = 0. Dal Teorema 3.5.6, esiste zn+1 ∈ C tale che P (zn+1) = 0 e quindi, dalla
(3.5.2), P (z) = (z − zn+1)Q(z), con Q polinomio di grado n; inoltre, il coefficiente di zn
del polinomio Q e an+1 = 0. Per l’ipotesi di induzione, esistono z1, . . . , zn ∈ C tali che
Q(z) = an+1 · (z− z1) · · · (z− zn) e quindi P (z) = an+1 · (z− z1) · · · (z− zn) · (z− zn+1);
la tesi e quindi vera per il numero naturale n + 1. Dal principio di induzione completa
segue la tesi per ogni n ≥ 1. #
Ognuno dei numeri z1, . . . , zn ∈ C verificanti la (3.5.3) e una radice diP ; tuttavia, tali radici non sono necessariamente tutte distinte. Per tenerconto di cio, conviene dare la seguente definizione.
Definizione 3.5.8 Sia P un polinomio di grado n ≥ 1 e sia h ∈ N, h ≥ 1.Si dice che una radice z0 di P ha molteplicita h se esiste un polinomio Q digrado n− h tale che Q(z0) = 0 (cioe z0 non deve essere una radice di Q) einoltre, per ogni z ∈ C,
P (z) = (z − z0)h ·Q(z) . (3.5.4)

3.5 Polinomi ed equazioni algebriche 73
In qualche caso, per comodita la definizione precedente puo essere estesaal caso h = 0 convenendo di denominare di molteplicita 0 un numero chenon e radice di P .
Il Corollario 3.5.7 si puo esprimere dicendo che un polinomio di gradon ≥ 1 ha esattamente n radici, se ognuna di esse viene contata con la propriamolteplicita; se z1, . . . , zs sono le radici distinte di P e se h1, . . . , hs sono lerispettive molteplicita, si ha
P (z) = an · (z − z1)h1 · · · (z − zs)
hs (3.5.5)
con h1 + . . . hs = n.Dalla formula precedente segue in particolare che un polinomio di grado
n ≥ 1 ha al piu n radici distinte. Conseguentemente, due polinomi P eQ, entrambi di grado minore o uguale di n, che coincidono in n + 1 puntidistinti sono necessariamente uguali (infatti il polinomio P − Q si annullain n+ 1 punti distinti).
Uno dei metodi piu comunemente utilizzati per determinare le radici diun polinomio P consiste nell’applicazione della regola di Ruffini, che per ilsuo carattere elementare non viene qui approfondita.
3.5.2 Polinomi a coefficienti reali
Ci si sofferma ora maggiormente sui polinomi a coefficienti reali, in quantoper tali polinomi si possono aggiungere alcune proprieta interessanti cherisulteranno particolarmente utili nel seguito.
Per esporre compiutamente tali proprieta, conviene introdurre il po-linomio coniugato di un assegnato polinomio (a coefficienti complessi) estudiarne il comportamento delle radici.
Definizione 3.5.9 Siano a0, . . . , an ∈ C con an = 0 e si consideri il poli-nomio P (z) = a0 + · · ·+ anzn. Si denomina polinomio coniugato di P , e sidenota con P il polinomio
P (z) = a0 + · · ·+ anzn.
Quindi il polinomio coniugato di un polinomio P ha come coefficienti iconiugati dei coefficienti di P . Se P ha grado n, anche il polinomio coniugatoha grado n. Ad esempio il coniugato del polinomio P (z) = iz4− 2z3 + (2−i)z + 1 + i e il polinomio P (z) = −iz4 − 2z3 + (2 + i)z + 1− i.
Ovviamente, un polinomio coincide con il suo polinomio coniugato se esolo se e a coefficienti reali.
Per quanto riguarda le radici del polinomio coniugato, vale la proprietaseguente.

74 Capitolo 3: Numeri complessi e polinomi
Proposizione 3.5.10 Se P e un polinomio e z0 ∈ C e una radice di P ,allora il numero complesso coniugato z0 di z0 e una radice del polinomioconiugato P .
Dimostrazione. Siano a0, . . . , an ∈ C con an = 0 tali che P (z) = a0+ · · ·+anzn. Allora,
dalla Definizione 3.5.9, P (z0) = a0 + a1z0 + · · · + anz0n = a0 + · · ·+ anzn0 = P (z0) e
quindi si ha P (z0) = 0 se e solo se P (z0) = 0 #
Si puo osservare in piu che sez1, . . . , zs sono le radici distinte di P aventirispettivamente molteplicita h1, . . . , hs, dalla (3.5.5) si ha P (z) = an · (z −z1)h1 · · · (z − zs)hs con h1 + . . . hs = n e quindi
P (z) = an · (z − z1)h1 · · · (z − zs)
hs (3.5.6)
Dunque z1, . . . , zs sono le radici distinte del polinomio coniugato P ed hannole stesse molteplicita h1, . . . , hs di z1, . . . , zs.
Dalla proprieta precedente si e in grado di ricavare alcune proprieta delleradici di un polinomio a coefficienti reali.
Proposizione 3.5.11 Sia P un polinomio a coefficienti reali. Se z0 ∈ C euna radice di P , allora anche il numero complesso coniugato z0 e una radicedi P avente la stessa molteplicita di z0.
La dimostrazione della proposizione precedente e ovvia, tenendo presenteche nel caso in esame P = P .
Poiche le radici di un polinomio di grado n sono esattamente n se si tieneconto della molteplicita, si deduce che le radici complesse non reali devonoessere a due a due coniugate e quindi sono in numero pari. Pertanto si hala seguente proprieta.
Proposizione 3.5.12 Sia P un polinomio a coefficienti reali di grado n ≥1, con n dispari. Allora esiste almeno una radice reale di P .
Come ulteriore conseguenza della Proposizione 3.5.11, si puo ricavareun’utile decomposizione di un polinomio a coefficienti reali.
Sia P (z) = a0 + · · ·+ anzn un polinomio con coefficienti a0, . . . , an ∈ R,an = 0. Dalla (3.5.5), e tenendo presente che le radici complesse sono traloro coniugate (e quindi possono essere moltiplicate tra loro dando luogo atermini di secondo grado con ∆ < 0), si deduce che il polinomio P si puodecomporre nel modo seguente:
P (x) = an(x− x1)h1 · · · (x− xp)
hp(x2 + b1x+ c1)k1 · · · (x2 + bqx+ cq)
kq ,(3.5.7)
dove x1, . . . , xp sono le radici reali di P aventi rispettivamente molteplicitah1, . . . , hp, e k1, . . . , kq sono le molteplicita delle radici complesse coniugate

3.5 Polinomi ed equazioni algebriche 75
dei termini x2+ b1x+ c1, . . . , x2+ bqx+ cq con ∆1 = b21− 4c1 < 0, . . . ,∆q =b2q − 4cq < 0. Poiche la somma di tutte le molteplicita deve essere n, si deveinfine avere
h1 + · · ·+ hp + 2(k1 + · · ·+ kq) = n .

Capitolo 4
Funzioni reali
Lo studio delle funzioni reali (aventi cioe R come insieme di arrivo) el’obiettivo principale dello studio seguente.
Nella prima parte saranno considerate funzioni reali definite in un sot-toinsieme di R (tali funzioni vengono denominate di variabile reale) mentrenella seconda parte si considereranno funzioni reali definite piu in generalein un sottoinsieme di Rn, n ≥ 2 (tali funzioni vengono denominate di piuvariabili reali).
4.1 Operazioni con le funzioni reali
Per le funzioni reali, valgono tutti i concetti introdotti nella Sezione 1.2 ein quelle successive. Inoltre, la struttura algebrica di R consente di definireun’analoga struttura algebrica sull’insieme delle funzioni reali definite inuno stesso insieme X.
Per precisare tale struttura algebrica si denoti con F(X,R) l’insiemedelle funzioni reali definite in X (tale insieme viene denotato spesso anchecon il simbolo RX).
Allora su F(X,R) sono definite le seguenti operazioni:
1. Addizione. Si considera la funzione + : F(X,R) × F(X,R) →F(X,R) che in ogni coppia (f, g) ∈ F(X,R) × F(X,R) assume co-me valore la funzione f + g : F(X,R)→ R definita ponendo, per ognix ∈ X
(f + g)(x) = f(x) + g(x) .
La funzione f + g viene denominata funzione somma di f e g.
In questo modo la somma di due funzioni viene ricondotta alla som-ma dei valori delle due funzioni e quindi alla somma di numeri reali.

78 Capitolo 4: Funzioni reali
Per questo motivo, per l’addizione continuano a valere le proprietadell’addizione tra numeri reali e precisamente:
• (Proprieta associativa) Per ogni f, g, h ∈ F(X,R): (f + g) + h =f + (g + h). Pertanto e superfluo l’uso delle parentesi e si puoscrivere piu semplicemente f + g + h.
• (Proprieta commutativa) Per ogni f, g ∈ F(X,R): f + g = g+ f .
• (Esistenza dell’elemento neutro) Si consideri la funzione nulla0 : X → R definita ponendo, per ogni x ∈ X, 0(x) = 0. Allora,per ogni f ∈ F(X,R), risulta f + 0 = f = 0 + f .
• (Esistenza della funzione opposta) Per ogni f ∈ F(X,R), siconsideri la funzione −f : X → R definita ponendo, per ognix ∈ X, (−f)(x) = −f(x). Allora, per ogni f ∈ F(X,R), risultaf + (−f) = 0 = (−f) + f e per tale motivo la funzione −f vienedenominata funzione opposta di f .
2. Moltiplicazione. Si considera la funzione · : F(X,R) × F(X,R) →F(X,R) che in ogni coppia (f, g) ∈ F(X,R)× F(X,R) assume comevalore la funzione f · g : F(X,R) → R definita ponendo, per ognix ∈ X,
(f · g)(x) := f(x) · g(x) .
La funzione f · g viene denominata funzione prodotto di f e g. Anchein questo caso valgono le proprieta si ottengono facilmente da quelledel prodotto di due numeri reali e precisamente valgono le seguentiproprieta.
• (Proprieta associativa) Per ogni f, g, h ∈ F(X,R): (f · g) · h =f · (g · h). Pertanto anche in questo caso e superfluo l’uso delleparentesi e si puo scrivere piu semplicemente f · g · h.
• (Proprieta commutativa) Per ogni f, g ∈ F(X,R): f · g = g · f .• (Esistenza dell’elemento neutro) Si consideri la funzione unita1 : X → R definita ponendo, per ogni x ∈ X, 1(x) = 1. Allora,per ogni f ∈ F(X,R), risulta f · 1 = f = 1 · f .
• (Esistenza della funzione reciproca) Sia f ∈ F(X,R) e si sup-ponga che, per ogni x ∈ X, risulti f(x) = 0. Allora si puo
considerare la funzione1
f: X → R definita ponendo, per ogni
x ∈ X,1
f(x) =
1
f(x). Ovviamente si ha f · 1
f= 1 =
1
f· f e per
tale motivo la funzione1
fviene denominata funzione reciproca

4.1 Operazioni con le funzioni reali 79
di f . Si osservi che la funzione reciproca non esiste per ogni fun-zione diversa da quella nulla, ma solo per le funzioni che non siannullano in ogni elemento dell’insieme di definizione.
3. Moltiplicazione esterna. Si considera la funzione · : R×F(X,R)→F(X,R) che in ogni coppia (λ, f) ∈ R×F(X,R) assume come valorela funzione λ · f : F(X,R)→ R definita ponendo, per ogni x ∈ X,
(λ · f)(x) := λ · f(x) .
La funzione f · g viene denominata ancora funzione prodotto di λ edf . Anche in questo caso le proprieta seguenti si ottengono facilmenteda quelle del prodotto di due numeri reali.
• Per ogni λ, µ ∈ R e per ogni f ∈ F(X,R): (λ+µ) ·f = λ ·f+µ ·f .• Per ogni λ ∈ R e per ogni f, g ∈ F(X,R): λ ·(f+g) = λ ·f+λ ·g.• Per ogni λ, µ ∈ R e per ogni f ∈ F(X,R): (λ · µ) · f = λ · (µ · f).• Per ogni f ∈ F(X,R): 1 · f = f .
Analogamente al caso della funzione nulla e della funzione unita, seλ ∈ R si puo convenire di denotare ancora con λ la funzione costantedi costante valore λ (cioe ∀ x ∈ X : λ(x) = λ). Con tale convenzio-ne la moltiplicazione esterna risulta essere un caso particolare dellamoltiplicazione tra due funzioni.
Dal punto di vista della struttura algebrica, l’insieme F(X,R) conl’addizione e la moltiplicazione esterna risulta essere uno spazio vet-toriale reale e con l’aggiunta della moltiplicazione tra funzioni risultaessere un algebra reale.
Tuttavia in molte questioni riguardanti lo studio delle funzioni realirisulta utile definire le operazioni di somma e prodotto anche se lefunzioni reali in esame non sono definite nello stesso sottoinsieme diR.Infatti, se f : X → R e g : Y → R sono funzioni reali definite ri-spettivamente in X ⊂ R e Y ⊂ R si possono definire le funzionif + g : X ∩ Y → R e f · g : X ∩ Y → R ponendo, per ogni x ∈ X ∩ Y ,
(f + g)(x) = f(x) + g(x) , (f · g)(x) = f(x) · g(x) .
Tali funzioni continuano ad essere denominate somma e rispettiva-mente prodotto delle funzioni f e g.
In maniera analoga si puo definire la funzione reciproca di una funzionereale in una situazione piu generale. Infatti se f : X → R e una
80 Capitolo 4: Funzioni reali
funzione reale non identicamente nulla (cioe diversa dalla funzionenulla o equivalentemente che assume almeno in un punto un valorediverso da 0), si puo definire il seguente sottoinsieme
X0 = x ∈ X | f(x) = 0
e conseguentemente si puo considerare la funzione1
f: X0 → R definita
ponendo, per ogni x ∈ X0,
1
f(x) =
1
f(x).
Anche in questo caso la funzione1
fcontinua ad essere denominata
funzione reciproca della funzione f .
In questo modo, se f : X → R e g : Y → R sono funzioni reali definitein X ⊂ R e rispettivamente Y ⊂ R, si puo considerare la funzione
quoziente di f e g che si denota conf
ged e definita nel modo seguente
f
g= f · 1
g
(prodotto di f con la reciproca di g). Ovviamente, la funzione quo-ziente e definita in x ∈ X ∩ Y | g(x) = 0.Si ricordano infine la convenzioni utilizzate nella sezione 1.2.3 che con-sentono di definire una funzione inversa di una funzione reale iniettivae di considerare la funzione composta in circostanze piu generali.
Funzione inversa. Siano X un sottoinsieme di R ed f : X → Runa funzione reale iniettiva. Allora la funzione ridotta f# di f (veda-si la (1.2.13)) risulta biiettiva e quindi ammette un’inversa (f#)−1 :f(X) → X. Estendendo l’insieme di arrivo all’intero R (per ottenereuna funzione reale) si considera infine la funzione f−1 : f(X) → Rdefinita ponendo, per ogni y ∈ f(X), f−1(y) = (f#)−1(y). Tale fun-zione viene ancora denominata funzione inversa di f e, per come edefinita, in ogni y ∈ f(X) assume come valore l’unico elemento x ∈ Xtale che y = f(x). La funzione f−1 risulta essere iniettiva al pari dif .
Tale procedimento verra applicato in particolare per ottenere le fun-zioni inverse delle funzioni elementari (in qualche caso bisognera inol-tre considerare opportune restrizioni che consentano di ottenere laproprieta di iniettivita).

4.2 Estremi di funzioni reali 81
Funzione composta. Se X ed Y sono sottoinsiemi di R e f : X → Re g : Y → R sono funzioni reali tali che f(X) ⊂ Y , si puo considerarela funzione reale composta g f : X → R definita ponendo, per ognix ∈ X, (g f)(x) = g(f(x)) (vedasi la (1.2.8)).
4.2 Estremi di funzioni reali
Tutte le proprieta esposte nella Sezione 2.3.4 possono essere riferite alle fun-zioni reali applicandole all’immagine della funzione, che e un sottoinsiemedi R. Pertanto, se X e un sottoinsieme1 di Red f : X ∈ R e una funzionereale, si ottengono le seguenti definizioni:
• Funzioni limitate. Si dice che f e limitata superiormente (rispetti-vamente, limitata inferiormente) se f(X) e un sottoinsieme limitatosuperiormente (rispettivamente, inferiormente) di R, cioe se
∃ M ∈ R t.c. ∀ x ∈ X : f(x) ≤M (rispettivamente, M ≤ f(x) )(4.2.1)
(si e tenuto conto del fatto che per ogni y ∈ f(X) esiste x ∈ X taleche y = f(x)).
Ogni elemento M ∈ R verificante la (4.2.1) viene ovviamente deno-minato maggiorante (rispettivamente, minorante) di f . Infine, si diceche f e limitata se e limitata sia superiormente che inferiormente.
• Funzioni dotate di massimo e minimo. Si dice f e dotata dimassimo (rispettivamente, dotata di minimo) se tale e il sottoinsiemef(X) di R, e quindi se esiste M ∈ R tale che
1) ∃ x ∈ X t.c. f(x0) = M ;2) ∀ x ∈ X : f(x) ≤M (rispettivamente, M ≤ f(x) ).
(4.2.2)L’elemento M verificante la (4.2.2) e unico e viene denominato mas-simo di f (rispettivamente, minimo di f) e si denota con uno deiseguenti simboli:
max f , maxx∈X
f(x) , (rispettivamente, minX , minx∈X
f(x) ).
Spesso a tale elemento M si attribuisce anche la denominazione dimassimo assoluto (rispettivamente, minimo assoluto di f per distin-guerlo dai massimi e minimi relativi di cui si trattera di seguito.
1In tutto il seguito, l’insieme di definizione di una funzione verra implicitamentesupposto non vuoto, anche se non precisato esplicitamente.

82 Capitolo 4: Funzioni reali
Al contrario, l’elemento x0 ∈ X previsto in 1) non e necessariamen-te unico. Ogni elemento x0 ∈ X verificante la condizione 1) prece-dente viene denominato punto di massimo (rispettivamente, punto diminimo) per f .
Accanto alle definizioni precedenti, conviene a questo punto introdurrela seguente.
Definizione 4.2.1 Siano f : X → R una funzione reale e sia x0 ∈ X. Sidice che x0 e un punto di massimo (rispettivamente, di minimo) relativoper f se esiste un numero reale δ > 0 tale che:2
∀ x ∈ X ∩ Iδ(x0)" x0 : f(x) ≤ f(x0) (rispettivamente, f(x0) ≤ f(x) ).(4.2.3)
Se la (4.2.3) vale con una diseguaglianza stretta (“<” al posto di “≤”),il punto di massimo (rispettivamente, di minimo) per f viene denominatoproprio.
Il valore f(x0) che la funzione assume in un punto di massimo (rispet-tivamente, di minimo) relativo per f , viene denominato massimo relativo(rispettivamente, minimo relativo) di f .
In Figura 4.1 viene raffigurata geometricamente una funzione che ha ilmassimo assoluto M assunto nel punto m ed ulteriori punti di massimorelativo p e q, con valori P e rispettivamente Q.
• Funzioni dotate di estremi. Si dice f e dotata di estremo superiore(rispettivamente, dotata di estremo inferiore) se tale e il sottoinsiemef(X) di R, e quindi se esiste un elemento ℓ ∈ R tale che⎧⎨
⎩
1) ∀ x ∈ X : f(x) ≤ ℓ (rispettivamente, ℓ ≤ f(x) );2) m ∈ R, ∀ x ∈ X : f(x) ≤ m ⇒ ℓ ≤ m
(rispettivamente, ∀ x ∈ X : m ≤ f(x) ⇒ m ≤ ℓ ).(4.2.4)
L’elemento ℓ verificante la (4.2.4) e unico, viene denominato estre-mo superiore di f (rispettivamente, estremo inferiore di f) e vienedenotato con uno dei seguenti simboli:
sup f , supx∈X
f(x) , (rispettivamente, infX , infx∈X
f(x) ).
Anche ora naturalmente la seconda proprieta in (4.2.4) si puo espri-mere in maniera equivalente come segue
∀ ε ∈ R∗+ ∃x ∈ X t.c. ℓ− ε < f(x) (rispettivamente, f(x) < ℓ+ ε ).
(4.2.5)
2Si ricorda che Iδ(x0) =]x0 − δ, x0 + δ[ (vedasi la (2.3.1) a pag. 42).

4.3 Proprieta di monotonia 83
x
y
0
M
m
P
p
Q
q
Figura 4.1: Esempio di massimo assoluto e relativo.
Dalla seconda forma dell’assioma di completezza (Proposizione 2.3.1)segue che ogni funzione limitata superiormente e dotata di estremo su-periore ed analogamente ogni funzione limitata inferiormente e dotatadi estremo inferiore.
Se f non e limitata superiormente (rispettivamente, inferiormente), siscrivera per convenzione
sup f = +∞ , inf f = −∞ .
4.3 Proprieta di monotonia
Le proprieta considerate nella presente sezione sono molto importanti perlo studio qualitativo del grafico di una funzione reale.
Definizione 4.3.1 Siano X un sottoinsieme di R ed f : X → R una funzio-ne reale. Si dice che f e crescente (rispettivamente, strettamente crescente,

84 Capitolo 4: Funzioni reali
decrescente, strettamente decrescente) se:
∀ x, y ∈ X : x < y ⇒ f(x) ≤ f(y) (4.3.1)
(rispettivamente, ∀ x, y ∈ X : x < y ⇒ f(x) < f(y) , (4.3.2)
∀ x, y ∈ X : x < y ⇒ f(x) ≥ f(y) , (4.3.3)
∀ x, y ∈ X : x < y ⇒ f(x) > f(y) ). (4.3.4)
Inoltre, f si dice monotona se verifica una qualsiasi delle condizioniprecedenti e viene denominata strettamente monotona se invece verifica la(4.3.2) oppure la (4.3.4).
Infine, se A e un sottoinsieme di X, si dice che f e crescente (rispetti-vamente, strettamente crescente, decrescente, strettamente decrescente) inA se la restrizione f|A di f al sottoinsieme A verifica tale proprieta.
In Figura 4.2 viene mostrato un esempio di una funzione strettamentecrescente in un intervallo I e strettamente decrescente in un intervallo J .
x
y
0
I
J
Figura 4.2: Funzione strettamente crescente (decrescente) in un intervallo.
Proposizione 4.3.2 Una funzione f : X → R risulta strettamente mono-tona se e solo se e monotona e iniettiva.
Dimostrazione. Se f e strettamente monotona essa e ovviamente mono-tona. Inoltre, se x, y ∈ X e x = y, si puo supporre x < y a meno di unoscambio di notazioni. Se f verifica la (4.3.2) allora f(x) < f(y), mentre sef verifica la (4.3.4) si ha f(y) < f(x); in ogni caso risulta f(x) = f(y) e ciodimostra che f e iniettiva.

4.3 Proprieta di monotonia 85
Si supponga ora f monotona; se f non fosse strettamente monotonadalle (4.3.2) e (4.3.4) esisterebbero x, y ∈ X con x < y e f(x) = f(y), il checontraddirebbe l’iniettivita di f . #
Anche ora conviene prendere in considerazione una nozione locale dimonotonia, che nel seguito per le funzioni derivabili potra essere messa inrelazione con il segno della derivata prima.
Definizione 4.3.3 Siano X un sottoinsieme di R, f : X → R una funzionereale e x0 ∈ X. Si dice che f e crescente (rispettivamente, strettamentecrescente, decrescente, strettamente decrescente) in x0 se esiste un numeroreale δ > 0 tale che
∀ x ∈ X∩ ]x0 − δ, x0[: f(x) ≤ f(x0) ,∀ x ∈ X∩ ]x0, x0 + δ[: f(x0) ≤ f(x)
(rispettivamente,
∀ x ∈ X∩ ]x0 − δ, x0[: f(x) < f(x0) ,∀ x ∈ X∩ ]x0, x0 + δ[: f(x0) < f(x) ;
∀ x ∈ X∩ ]x0 − δ, x0[: f(x) ≥ f(x0) ,∀ x ∈ X∩ ]x0, x0 + δ[: f(x0) ≥ f(x) ;
∀ x ∈ X∩ ]x0 − δ, x0[: f(x) > f(x0) ,∀ x ∈ X∩ ]x0, x0 + δ[: f(x0) > f(x) ).
In Figura 4.3, viene mostrato geometricamente un punto a in cui unafunzione e strettamente crescente ed un punto b in cui e strettamente de-crescente.
Nell’osservazione seguente si considera per brevita una funzione crescen-te; con ovvie modifiche, analoghe proprieta possono essere stabilite nel casoin cui f sia strettamente crescente, decrescente o strettamente decrescente.
Osservazione 4.3.4 Dalle definizioni adottate, segue subito che:
1. Se f : X → R e crescente, allora f e crescente in x0 per ogni x0 ∈ X.
2. Se X e un intervallo, allora f : X → R e crescente se e solo se f ecrescente in ogni x0 ∈ X.
Infatti, tenendo conto della proprieta precedente, bisogna solo dimostrare che se
f e crescente in ogni punto x0 ∈ X, allora f e crescente. Infatti, in tal caso, siano
x, y ∈ X tali che x < y. Poiche X e un intervallo, si ha [x, y] ⊂ X e quindi si puo
considerare l’insieme A := t ∈ [x, y] | f(x) ≤ f(t) . L’insieme A e non vuoto
(infatti x ∈ A) e limitato superiormente (in quanto contenuto in [x, y]); dalla

86 Capitolo 4: Funzioni reali
x
y
0a b
Figura 4.3: Funzione strettamente crescente (decrescente) in un punto.
seconda forma dell’assioma di completezza, esso e dotato di estremo superiore
x0 ∈ [x, y]. Poiche f e crescente in x0, esiste δ ∈ R∗+ verificante le proprieta
previste nella Definizione 4.3.3. Dalla seconda proprieta dell’estremo superiore,
si puo trovare t ∈ A tale che x0 − δ < t ≤ x0, da cui segue f(x) ≤ f(t) ≤f(x0); quindi x0 ∈ A. Inoltre, non puo essere x0 < y altrimenti, considerato
t ∈ X∩]x0, x0 + δ[∩]x0, y], si avrebbe f(x0) ≤ f(t) e conseguentemente anche
f(x0) ≤ f(t); cio comporterebbe t ∈ A in contraddizione con il fatto che x0 < t
e che x0 = supA. Si e cosı dimostrato che y = x0 ∈ A e quindi, dalla definizione
di A, f(x) ≤ f(y). Dall’arbitrarieta di x, y ∈ X tali che x < y segue che f e
crescente.
In generale, la parte 1) dell’osservazione precedente non si puo invertirenel caso in cui X non sia un intervallo.
Ad esempio, la funzione f : R∗ → R definita ponendo, per ogni x ∈ R∗,f(x) = −1/x e strettamente crescente in ogni punto, ma non e strettamentecrescente (le sue restrizioni agli intervalli ]−∞, 0[ e ]0,+∞[ sono chiaramentestrettamente crescenti ma, ad esempio, si ha −1 < 1 e f(−1) > f(1)).
La nozione di crescenza o decrescenza in un punto non va confusa conquella di crescenza o decrescenza in un intervallo aperto contenente talepunto. Infatti, ad esempio, la funzione f : R → R definita ponendo, per

4.4 Proprieta di simmetria e periodicita 87
ogni x ∈ R,
f(x) :=
⎧⎨
⎩
x+ 1 , x < 0 ,0 , x = 0 ,x− 1 , x > 0 ,
e strettamente decrescente in 0, mentre e strettamente crescente in ognix0 ∈ R∗.
4.4 Proprieta di simmetria e periodicita
Anche le proprieta seguenti sono utili per lo studio qualitativo del grafico diuna funzione reale in quanto consentono di limitare lo studio della funzionea quello di una sua opportuna restrizione.
Definizione 4.4.1 Siano X un sottoinsieme di R ed f : X → R una fun-zione reale. Si dice che f e pari (rispettivamente, dispari) se e verificata laseguente condizione:
1) ∀ x ∈ X : −x ∈ X ,2) ∀ x ∈ X : f(−x) = f(x) (rispettivamente, f(−x) = −f(x) ).
Le proprieta 1) precedente si esprime anche dicendo che X e simmetrico.Innanzitutto, quindi, e importante verificare tale condizione, senza la qualenon ha senso chiedersi se la funzione e pari o dispari.
Diversi esempi di funzioni pari o dispari saranno considerati in seguitoquando saranno studiate le funzioni elementari.
Il grafico di una funzione pari e simmetrico rispetto all’asse delle ordina-te, mentre il grafico di una funzione dispari e simmetrico rispetto all’origine.Pertanto, si puo studiare una funzione pari o dispari dapprima inX∩[0,+∞[(oppure in X∩] −∞, 0] e poi si puo ricavare il comportamento nella parterimanente dell’insieme di definizione in base alle proprieta di simmetria.
A questo punto si passa a studiare la proprieta di periodicita, anch’essautile per ridurre lo studio di una funzione a quello di una sua opportunarestrizione.
Definizione 4.4.2 Siano X un sottoinsieme di R, f: X → R una funzionereale e ω ∈ R∗
+. Si dice che f e periodica di periodo ω (oppure, brevemente,ω-periodica) se e verificata la seguente condizione:
1) ∀ x ∈ X : x− ω ∈ X , x+ ω ∈ X ,2) ∀ x ∈ X : f(x− ω) = f(x) = f(x+ ω) .

88 Capitolo 4: Funzioni reali
La proprieta 1) precedente si esprime anche dicendo cheX e ω-periodico.Gli esempi piu importanti di funzioni periodiche saranno le funzioni
trigonometriche; si vedra che le funzioni seno e coseno sono periodiche diperiodo 2π, mentre le funzioni tangente e cotangente sono periodiche diperiodo π.
Come segue dalla condizione 2) della Definizione 4.4.2, il grafico diuna funzione ω-periodica si ripete ad intervalli di periodo ω. Pertanto,e sufficiente studiare tali funzioni in un intervallo di ampiezza ω.
Se, in piu, una funzione e anche pari o dispari, si puo scegliere l’insiemesimmetrico [−ω/2,ω/2] come intervallo di ampiezza ω e quindi ridurre lostudio della funzione al sottoinsieme X ∩ [0,ω/2] (oppure X ∩ [−ω/2, 0]) acausa della proprieta di simmetria.
4.5 Successioni
Una funzione a : N→ E viene denominata successione di elementi di E.Nel caso in cui E = R si usera la denominazione di successione reale.L’insieme dei valori di una successione viene denominato insieme degli
elementi della successione.Pertanto, tutte le definizioni e le proprieta delle funzioni reali possono
essere applicate al caso delle successioni di numeri reali, riguardando questecome particolari funzioni aventi N come insieme di definizione.
Per le successioni, tuttavia, si adoperano una terminologia e delle nota-zioni particolari. Cosı, anziche utilizzare le notazioni tipiche delle funzioni,per le successioni si preferisce utilizzare la notazione (an)n∈N evidenziandoin tal modo il ‘valore’ an = a(n) che la successione assume in un genericoelemento n ∈ N.
A titolo di esempio, si passano ora in rassegna alcune delle definizioniviste in generale per le funzioni traducendole nel caso delle successioni.
Se (an)n∈N e (bn)n∈N sono successioni reali, la somma e il prodotto delledue successioni sono definite al modo seguente:
(an)n∈N + (bn)n∈N := (an + bn)n∈N , (an)n∈N · (bn)n∈N := (an · bn)n∈N .
Una successione (an)n∈N si dice limitata superiormente (rispettivamente,limitata inferiormente) se esiste M ∈ R tale che
∀ n ∈ N : an ≤M (rispettivamente, ∀ n ∈ N : M ≤ an ).
Se una successione (an)n∈N e limitata superiormente (rispettivamente,inferiormente), l’estremo superiore (rispettivamente, inferiore) ℓ di (an)n∈N

4.5 Successioni 89
e caratterizzato dalle seguenti proprieta:⎧⎨
⎩
1) ∀ n ∈ N : an ≤ ℓ (rispettivamente, ℓ ≤ an );2) m ∈ R, ∀ n ∈ N : an ≤ m ⇒ ℓ ≤ m
(rispettivamente, ∀ n ∈ N : m ≤ an ⇒ m ≤ ℓ )
e viene denotato con il simbolo supn∈N an (rispettivamente, infn∈N an).Se (an)n∈N non e limitata superiormente (rispettivamente, inferiormen-
te), si scrivera supn∈N an = +∞ (rispettivamente, infn∈N an = −∞).Una successione (an)n∈N si dice crescente se:3
∀ n ∈ N : an ≤ an+1 . (4.5.1)
In modo analogo si considerano le definizioni di successione strettamentecrescente, decrescente, e strettamente decrescente.
Per le successioni e spesso importante stabilire le proprieta definitive,che sono cioe vere da un certo indice n in poi. Cosı, ad esempio, si dice cheuna successione (an)n∈N e definitivamente crescente se:
∃ ν ∈ N t.c. ∀ n ∈ N, n ≥ ν : an ≤ an+1 .
Analogamente, si dice che gli elementi di una successione (an)n∈N sonodefinitivamente minori o uguali di quelli di una successione (bn)n∈N (o, piubrevemente, che (an)n∈N e definitivamente minore o uguale di (bn)n∈N) seesiste ν ∈ N tale che, per ogni n ∈ N, n ≥ ν, si abbia an ≤ bn.
In base a quanto sopra, in generale potrebbe non interessare il compor-tamento di una successione in un numero finito di elementi e addiritturala successione (si continua a denominare tale) potrebbe essere definita soloda un certo numero naturale p in poi, nel qual caso si adopera la notazione(an)n≥p.
Si conclude la presente sezione con un esempio molto importante disuccessione che consente di definire il numero di Nepero.
4.5.1 Numero di Nepero
Si consideri la successione reale definita ponendo, per ogni n ≥ 1,
en :=
(1 +
1
n
)n
.
3E facile riconoscere che tale condizione e equivalente alla seguente
∀ n,m ∈ N : n < m ⇒ an ≤ am .
Infatti, e ovvio che quest’ultima implica la (4.5.1) considerando m = n+ 1. Per stabilireil viceversa, si puo procedere per induzione completa sul numero naturale p = m − n(vedasi la Proposizione 2.1.1).

90 Capitolo 4: Funzioni reali
Si osservi che e1 = 2 e inoltre, dalla formula del binomio di Newton (Proposizione2.1.2), si ha, per ogni n ≥ 2,
(1 +
1
n
)n
=n∑
k=0
(nk
) 1
nk= 1 + 1 +
n∑
k=2
n(n− 1) · · · (n− k + 1)
k!
1
nk(4.5.2)
= 2 +n∑
k=2
1
k!
n
n
n− 1
n· · ·
n− k + 1
n
= 2 +n∑
k=2
1
k!
(1−
1
n
)· · ·(1−
k − 1
n
).
Pertanto, 2 e il minimo della successione (en)n≥1.
Proposizione 4.5.1 La successione (en)n≥1 e limitata superiormente.
Dimostrazione. Per ogni n ≥ 2, dalle (4.5.2) segue
en ≤ 2 +n∑
k=2
1
k!;
inoltre, poiche 2k−1 ≤ k! per ogni k ≥ 2 (tale diseguaglianza si stabilisce facilmente perinduzione completa (vedasi la Proposizione 2.1.1), si ottiene
en ≤ 2 +n∑
k=2
1
2k−1= 2 +
n−1∑
h=1
1
2h= 1 +
n−1∑
h=0
1
2h.
A questo punto, ricordando che
∀ a, b ∈ R : an − bn = (a− b)n−1∑
k=0
akbn−1−k
(anche questa uguaglianza si stabilisce direttamente per induzione completa), si conclude
en ≤1− 1/2n
1− 1/2= 1 + 2−
1
2n−1< 3 .
#
In base alla proposizione precedente, si puo considerare l’estremo supe-riore della successione (en)n≥1, il quale viene denominato numero di Neperoe denotato con e:
e := supn≥1
(1 +
1
n
)n
. (4.5.3)
Dalle osservazioni precedenti si ha 2 < e ≤ 3; un’analisi piu precisapermette di riconoscere che e ∼ 2, 718281828945 . . . . Si puo dimostrareinoltre, ma non si approfondisce tale aspetto, che e e un numero irrazionale.
Un’ulteriore proprieta importante della successione (en)n≥1, che consen-tira di scrivere il numero di Nepero come limite della successione (en)n≥1,viene invece stabilita di seguito.

4.6 Funzioni elementari 91
Proposizione 4.5.2 La successione (en)n≥1 e strettamente crescente.
Dimostrazione. Infatti, per ogni n ≥ 1, dalle (4.5.2), si ha
en < 2 +n∑
k=2
1
k!
(1−
1
n+ 1
)· · ·(1−
k − 1
n+ 1
)
< 2 +n+1∑
k=2
1
k!
(1−
1
n+ 1
)· · ·(1−
k − 1
n+ 1
)= en+1 .#
4.6 Funzioni elementari
Vengono a questo punto considerate alcune tra le piu importanti funzionireali; esse vengono denominate funzioni elementari in quanto le funzionireali di cui ci si occupera in seguito si otterranno in generale da esse medianteoperazioni algebriche oppure di composizione tra funzioni. Le proprieta e ilgrafico di tali funzioni si riveleranno molto utili nei capitoli successivi.
4.6.1 Funzioni potenza ad esponente intero positivo
Per ogni n ∈ N, la funzione potenza ad esponente intero positivo n e lafunzione fn : R→ R definita ponendo, per ogni x ∈ R,
fn(x) = xn .
Dalle proprieta elementari delle potenze di numeri reali, si ricavano facil-mente le seguenti proprieta delle funzioni fn.
1. fn(0) = 0 , fn(1) = 1 .
2. Se x, y ∈ R e 0 ≤ x < y, allora fn(x) < fn(y).
Tale proprieta puo essere dimostrata facilmente utilizzando il principio di induzione
completa. Se n = 1, la proprieta e ovviamente vera. Si supponga che sia vera per n
e siano x, y ∈ R tali che 0 ≤ x < y. Dall’ipotesi di induzione si ha fn(x) < fn(y),
cioe xn < yn e da qui si ricava xn+1 = xn · x < yn · x < yn · y = yn+1, cioe
fn+1(x) < fn+1(y). Quindi la proprieta e vera per n + 1. Lo schema della
presente dimostrazione, fornita a titolo di esempio, si applica anche a diverse
proprieta successive.
3. Se x ∈ R e 0 ≤ x ≤ 1, allora 0 ≤ fn+1(x) ≤ fn(x) ≤ 1.
4. Se x ∈ R e x ≥ 1, allora 1 ≤ fn(x) ≤ fn+1(x).
5. Se n e pari fn e una funzione pari mentre se n e dispari fn e unafunzione dispari.

92 Capitolo 4: Funzioni reali
Tenendo presente le proprieta precedenti, si puo ora tracciare appros-simativamente il grafico delle funzioni potenza con esponente pari e dispa-ri. Tali grafici sono utili anche perche riassumono in modo geometrico leproprieta enunciate sopra.
Nelle Figure 4.4–4.5, il grafico continuo rappresenta la funzione potenzan-esima, mentre quello tratteggiato rappresenta la potenza (n + 2)-esima.In Figura 4.4 viene illustrato il grafico tipico delle funzioni potenza nel cason pari, mentre in Figura 4.5 quello nel caso n dispari (n ≥ 3).
-1 1x
y
1
0
Figura 4.4: Funzione potenza ad esponente pari (≥ 2).
4.6.2 Funzioni radice
Innanzitutto si osserva che, come conseguenza dell’assioma di completezza,per ogni n ≥ 2 e per ogni b ∈ R+ esiste uno ed un solo a ∈ R+ tale chean = b (l’elemento a, infatti, puo essere definito come estremo superioredell’insieme x ∈ R+ | xn < b). Tale elemento viene denominato radicen-esima di b e denotato con uno dei seguenti simboli:
n√b , b1/n ;
nella notazione n√b si puo omettere l’indice n nel caso n = 2.
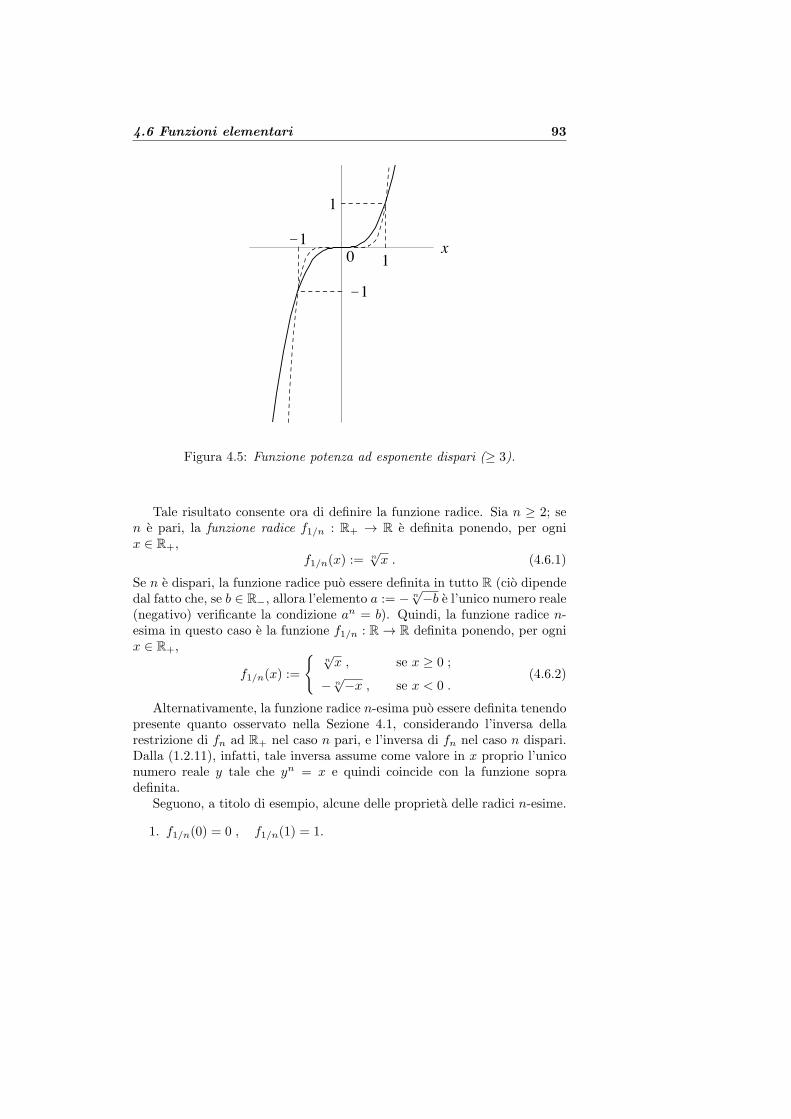
4.6 Funzioni elementari 93
1x
1
y
-1
-1
0
Figura 4.5: Funzione potenza ad esponente dispari (≥ 3).
Tale risultato consente ora di definire la funzione radice. Sia n ≥ 2; sen e pari, la funzione radice f1/n : R+ → R e definita ponendo, per ognix ∈ R+,
f1/n(x) :=n√x . (4.6.1)
Se n e dispari, la funzione radice puo essere definita in tutto R (cio dipendedal fatto che, se b ∈ R−, allora l’elemento a := − n
√−b e l’unico numero reale
(negativo) verificante la condizione an = b). Quindi, la funzione radice n-esima in questo caso e la funzione f1/n : R→ R definita ponendo, per ognix ∈ R+,
f1/n(x) :=
n√x , se x ≥ 0 ;
− n√−x , se x < 0 .
(4.6.2)
Alternativamente, la funzione radice n-esima puo essere definita tenendopresente quanto osservato nella Sezione 4.1, considerando l’inversa dellarestrizione di fn ad R+ nel caso n pari, e l’inversa di fn nel caso n dispari.Dalla (1.2.11), infatti, tale inversa assume come valore in x proprio l’uniconumero reale y tale che yn = x e quindi coincide con la funzione sopradefinita.
Seguono, a titolo di esempio, alcune delle proprieta delle radici n-esime.
1. f1/n(0) = 0 , f1/n(1) = 1.

94 Capitolo 4: Funzioni reali
2. Se x ∈ R+, f1/n(x) ≥ 0 .
3. Se x, y ∈ R+ e x < y, allora f1/n(x) < f1/n(y).
Infatti, se fosse n√y ≤ n
√x, elevando alla potenza n-esima, dalle proprieta delle
potenze seguirebbe y ≤ x, in contraddizione con le ipotesi.
4. Se x ∈]0, 1[, allora f1/n(x) < f1/(n+1)(x) .
5. Se x ∈]1,+∞[, allora f1/(n+1)(x) < f1/n(x) .
6. Se n e dispari, la funzione radice n-esima risulta una funzione dispari(mentre se n e pari non ha senso chiedersi se la funzione radice n-esimasia simmetrica in quanto essa e definita in un insieme non simmetrico).
Nelle Figure 4.6–4.7, approssimativamente il grafico delle funzioni radicenei casi n pari ed n dispari; viene usato il tratto continuo per la radicen-esima, e tratteggiato per la radice (n+ 2)-esima.
1x
1
y
0
Figura 4.6: Funzione radice con indice pari.
4.6.3 Funzione potenza ad esponente intero negativo
Si fissi ora un numero naturale n ≥ 2 e si consideri la funzione reale f−n :R∗ → R definita ponendo, per ogni x ∈ R∗,
f−n(x) :=1
xn. (4.6.3)
Tale funzione viene denominata funzione potenza ad esponente interonegativo n. Dalla definizione adottata, tale funzione non e altro che lafunzione reciproca della funzione potenza ad esponente intero positivo n.
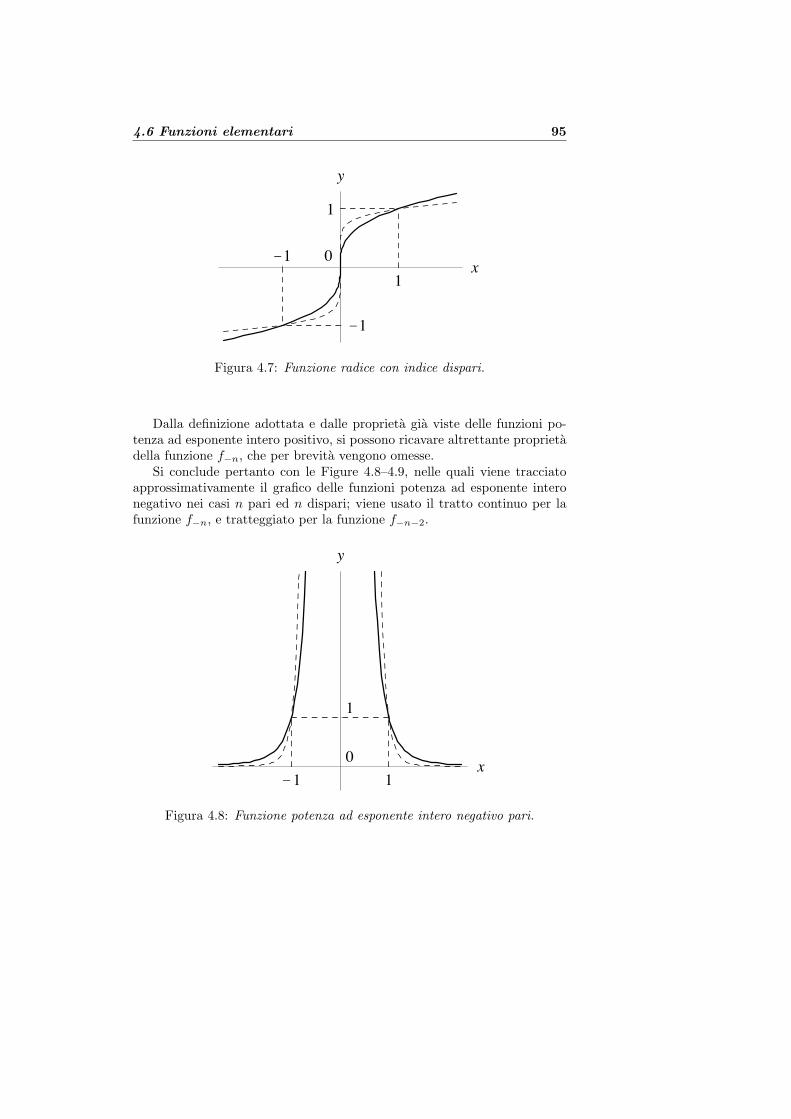
4.6 Funzioni elementari 95
1x
1
y
-1
-1 0
Figura 4.7: Funzione radice con indice dispari.
Dalla definizione adottata e dalle proprieta gia viste delle funzioni po-tenza ad esponente intero positivo, si possono ricavare altrettante proprietadella funzione f−n, che per brevita vengono omesse.
Si conclude pertanto con le Figure 4.8–4.9, nelle quali viene tracciatoapprossimativamente il grafico delle funzioni potenza ad esponente interonegativo nei casi n pari ed n dispari; viene usato il tratto continuo per lafunzione f−n, e tratteggiato per la funzione f−n−2.
-1 1x
y
0
1
Figura 4.8: Funzione potenza ad esponente intero negativo pari.

96 Capitolo 4: Funzioni reali
-1 1x
1
y
-1
Figura 4.9: Funzione potenza ad esponente intero negativo dispari.
4.6.4 Funzioni potenza ad esponente razionale e reale
Si vuole ora studiare il caso delle funzioni potenza in cui l’esponente sia unnumero razionale oppure reale.
Nel caso di un esponente razionale q ∈ Q, si possono considerare m ∈ Zed n ∈ N tali che n = 0 e q = m/n. Per ogni numero reale strettamentepositivo x, ha senso considerare la potenza ad esponente razionale xq che sidefinisce ponendo
xq := (xm)1/n (= n√xm) ;
se q > 0, tale definizione puo essere estesa ad x = 0 ponendo 0q = 0.Conviene subito osservare che se si considera un’altra rappresentazione del
numero razionale q del tipo q = m′/n′, si ha (xm′)1/n′
= (xm)1/n in quanto

4.6 Funzioni elementari 97
m′ · n = m · n′ e conseguentemente xm′·n = xm·n′. Pertanto il numero xq
non dipende dalla particolare rappresentazione del numero razionale q.Si fissi un numero reale arbitrario r e sia x un numero reale strettamente
positivo. Per ogni numero razionale q < r ha senso considerare, per quantovisto sopra, la potenza xq; allora la potenza ad esponente reale xr vienedefinita ponendo
xr :=
⎧⎨
⎩
infq∈Q, q≤r
xq , se 0 < x < 1 ;
supq∈Q, q≤r
xq , se x ≥ 1 . (4.6.4)
Alternativamente, si potrebbero considerare i numeri razionali q > r eporre
xr :=
⎧⎨
⎩
supq∈Q, q≥r
xq , se 0 < x < 1 ;
infq∈Q, q≥r
xq , se x ≥ 1 .
Si puo dimostrare che le due definizioni sono equivalenti. Se r > 0, sipone inoltre 0r = 0.
A questo punto, si considera la funzione potenza ad esponente reale.Precisamente, se r > 0, si considera la funzione fr : [0,+∞[→ R definitaponendo, per ogni x ∈ [0,+∞[,
fr(x) := xr .
Se r ≤ 0, la funzione potenza ad esponente reale fr :]0,+∞[→ R vienedefinita allo stesso modo, ma non e definita in 0 e quindi ha come insiemedi definizione l’insieme ]0,+∞[.
Se q ∈ Q, le proprieta della funzione fq possono essere ricavate tenendopresente contemporaneamente le proprieta delle funzioni ad esponente interoe delle funzioni radice; conseguentemente, dalla (4.6.4), si possono consi-derare le proprieta delle funzioni potenza ad esponente reale. Per brevita,ci si limita ad osservare che l’andamento grafico di tali funzioni e quellotipico di una funzione potenza ad esponente intero positivo nel caso r > 1,di una funzione radice nel caso 0 < r < 1 e di una funzione potenza adesponente intero negativo nel caso q < 0.
Nella Figura 4.10, sono riportati i grafici generali delle funzioni potenzaad esponente reale.
4.6.5 Funzioni esponenziali e logaritmiche
Nel paragrafo precedente si e attribuito un significato alla potenza aventecome base un numero reale strettamente positivo e come esponente un nu-mero reale arbitrario. Fissato poi un numero reale arbitrario r, si e studiata

98 Capitolo 4: Funzioni reali
1x
1
y
0
Figura 4.10: Funzione potenza con esponente razionale o reale.
la funzione potenza fr, cioe il comportamento della potenza xr al variaredella base.
Si vuole invece ora studiare la funzione ottenuta fissando la base dellapotenza ad esponente reale e facendo variare l’esponente. Si deve osservareche la base deve essere un numero strettamente positivo, mentre l’esponentepuo essere un numero reale qualsiasi. Sia pertanto a ∈ R∗
+ e si supponga,per evitare casi banali, a = 1. Si consideri la funzione expa : R→ R definitaponendo, per ogni x ∈ R,
expa(x) := ax . (4.6.5)
Tale funzione prende il nome di funzione esponenziale di base a. Le proprietadi tale funzione sono conseguenza delle proprieta delle potenze ad esponentereale. Si osservi che la funzione esponenziale e definita in tutto R ed assumevalori strettamente positivi. Nel caso particolare in cui a sia il numero edi Nepero (vedasi la (4.5.3)), la funzione esponenziale viene denominatasemplicemente funzione esponenziale e denotata con il simbolo exp (quindi,per ogni x ∈ R, exp(x) := ex).
Il comportamento della funzione esponenziale dipende dai casi 0 < a < 1oppure a > 1.
Alcune proprieta delle funzioni esponenziali sono elencate di seguito:

4.6 Funzioni elementari 99
1. expa(0) = 1 e expa(1) = a;
2. Per ogni x, y ∈ R, risulta expa(x+ y) = expa(x) · expa(y);
3. La funzione expa e strettamente crescente se a > 1 e strettamentedecrescente se 0 < a < 1;
4. Per ogni x ∈ R, risulta expa(x) = ax = (1/a)−x = exp1/a(−x); quindii grafici di expa e exp1/a risultano simmetrici tra di essi rispetto all’assedelle ordinate;
5. Per ogni x, y ∈ R, risulta (expa(x))y = expa(x y).
Riassumendo, l’andamento del grafico delle funzioni esponenziali e deltipo tracciato nelle Figura 4.11. Come si puo notare, il comportamentodella funzione esponenziale dipende dai casi 0 < a < 1 oppure a > 1; lacurva continua rappresenta il grafico di una funzione esponenziale con basea > 1, mentre quella tratteggiata il grafico di una funzione esponenziale conbase 0 < a < 1.
1x
1
y
a
a0
Figura 4.11: Funzione esponenziale.
Si osservi che la funzione esponenziale expa e strettamente monotona equindi iniettiva. Pertanto, tenendo presente quanto osservato nella Sezione4.1, si puo considerare l’inversa di expa, che viene denominata funzionelogaritmo di base a e denotata con loga. Tenendo presente che l’immagine

100 Capitolo 4: Funzioni reali
di expa e R∗+, la funzione logaritmo e definita in R∗
+ (ed a valori in R):loga : R∗
+ → R; inoltre, dalla (1.2.11), per ogni x ∈ R∗+, loga(x) e l’unico
numero y ∈ R tale che expa(y) = x.
Anche ora, se a = e, la funzione logaritmo viene denominata semplice-mente funzione logaritmo e denotata con il simbolo loga (quindi, per ognix ∈ R∗
+, log(x) := loge(x)).
Le proprieta di tale funzione sono conseguenza delle proprieta generalidelle funzioni inverse e dipendono da quelle delle funzioni esponenziali. Adesempio, si ha
1. loga(1) = 0 , loga(a) = 1 .
2. Per ogni x ∈ R: loga(expa(x)) = x .
3. Per ogni x ∈ R∗+: expa(loga(x)) = x .
Altre proprieta derivano da quelle generali dei logaritmi; per comodita,si richiamano di seguito quelle di piu frequente utilizzo (la verifica di taliproprieta e diretta usando la definizione di logaritmo e le proprieta dellefunzioni esponenziali). Nelle proprieta successive, i numeri a e b che figuranocome base dei logaritmi devono chiaramente intendersi strettamente positivie diversi da 1.
4. Per ogni x, y ∈ R∗+: loga(x · y) = loga(x) + loga(y) .
5. Per ogni x ∈ R∗+: loga
(1
x
)= − loga(x) .
6. Per ogni x, y ∈ R∗+: loga
(x
y
)= loga(x)− loga(y) .
7. Per ogni x ∈ R∗+ ed y ∈ R: loga (xy) = y loga(x) .
8. Per ogni x ∈ R∗+: logb(x) =
loga(x)
loga(b).
Anche il comportamento della funzione logaritmo dipende dai casi 0 <a < 1 oppure a > 1 (questa volta i grafici di loga e log1/a risultanosimmetrici tra di essi rispetto all’asse delle ascisse).
Il grafico delle funzioni logaritmo e del tipo tracciato nella Figura 4.12.

4.6 Funzioni elementari 101
1x
1
y
a a0
Figura 4.12: Funzione logaritmo.
4.6.6 Funzioni trigonometriche
Per ogni x ∈ R, si puo considerare un punto P corrispondente sulla circon-ferenza trigonometrica ottenuto considerando il secondo estremo dell’arcodi lunghezza x avente come primo estremo il punto A di coordinate (1, 0) epercorrendo la circonferenza in senso orario se x e positivo e in senso orariose x e negativo. Le coordinate cartesiane del punto P vengono denominatecoseno e rispettivamente seno di x. Tali quantita sono definite per ognix ∈ R e quindi si possono considerare la funzione seno e la funzione coseno,che verranno denotate rispettivamente con sin e cos, e fanno corrisponderead ogni numero reale x, i numeri sinx e cosx appena definiti.
Le proprieta delle funzioni seno e coseno si deducono facilmente da quelledel seno e del coseno elencate nella Sezione 3.2.
Da tali proprieta si deduce la periodicita di periodo 2π di tali funzioni.Inoltre esse sono limitate ed hanno 1 come massimo e −1 come minimo (visono infiniti punti di massimo dati da π/2 + 2kπ con k ∈ Z per la funzioneseno e da 2kπ con k ∈ Z per la funzione coseno e infiniti punti di minimodati da −π/2 + 2kπ con k ∈ Z per la funzione seno e da π + 2kπ con k ∈ Zper la funzione coseno).
Inoltre la funzione seno e una funzione dispari mentre la funzione cosenoe pari.
Da tali proprieta e dai valori di tali funzioni negli archi noti e facile

102 Capitolo 4: Funzioni reali
tracciare il grafico delle funzioni seno e coseno con sufficiente precisione.Il grafico delle funzioni seno e coseno e tracciato approssimativamente
nella Figura 4.13.
-π -
π-2
π-2 π
x
-1
y
0
1
Figura 4.13: Funzioni seno e coseno.
A questo punto si osserva che la tangente e definita per ogni x ∈π2+ kπ | k ∈ Z
e quindi si puo considerare la funzione tangente definita in tale insieme e
denotata ancora con tan; dunque tan : R"π2+ kπ | k ∈ Z
→ R e definita
ponendo, per ogni x ∈ R"π2+ kπ | k ∈ Z
,
tanx :=sinx
cosx. (4.6.6)
Dalle proprieta della tangente richiamate nella Sezione 3.2, si deduce che
la funzione tangente e periodica di periodo π. Inoltre, tan(−x) = sin(−x)cos(−x) =
− sinx
cosx= − tanx e quindi la funzione tangente e dispari (si osservi che il
suo insieme di definizione e simmetrico).Dai valori degli archi noti per il seno e per il coseno si deducono altret-
tanti archi noti per la tangente.Il grafico della funzione tangente e approssimativamente quello tracciato
nella Figura 4.14.In modo analogo a quanto visto per la funzione tangente, si puo proce-
dere considerando il rapporto tra la funzione coseno e quella seno. Poichela funzione seno si annulla nell’insieme kπ | k ∈ Z, tale rapportoe definito in R " kπ | k ∈ Z. Si ottiene pertanto la funzione co-tangente cot : R " kπ | k ∈ Z → R definita ponendo, per ognix ∈ R" kπ | k ∈ Z,
cotx :=cosx
sinx. (4.6.7)
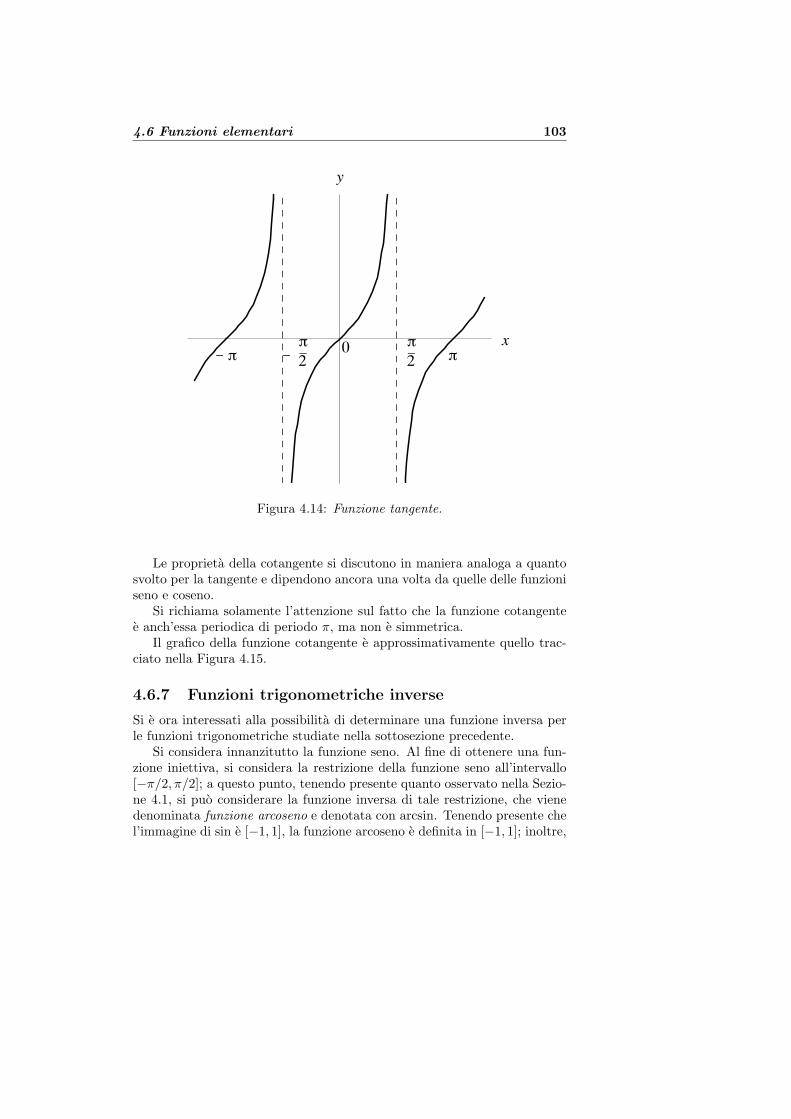
4.6 Funzioni elementari 103
- π -
π-2
π-2 π
x
y
0
Figura 4.14: Funzione tangente.
Le proprieta della cotangente si discutono in maniera analoga a quantosvolto per la tangente e dipendono ancora una volta da quelle delle funzioniseno e coseno.
Si richiama solamente l’attenzione sul fatto che la funzione cotangentee anch’essa periodica di periodo π, ma non e simmetrica.
Il grafico della funzione cotangente e approssimativamente quello trac-ciato nella Figura 4.15.
4.6.7 Funzioni trigonometriche inverse
Si e ora interessati alla possibilita di determinare una funzione inversa perle funzioni trigonometriche studiate nella sottosezione precedente.
Si considera innanzitutto la funzione seno. Al fine di ottenere una fun-zione iniettiva, si considera la restrizione della funzione seno all’intervallo[−π/2,π/2]; a questo punto, tenendo presente quanto osservato nella Sezio-ne 4.1, si puo considerare la funzione inversa di tale restrizione, che vienedenominata funzione arcoseno e denotata con arcsin. Tenendo presente chel’immagine di sin e [−1, 1], la funzione arcoseno e definita in [−1, 1]; inoltre,

104 Capitolo 4: Funzioni reali
- π πx
y
0-
π-2
π-2
Figura 4.15: Funzione cotangente.
dalla (1.2.11), arcsin : [−1, 1]→ R e definita ponendo, per ogni x ∈ [−1, 1],arcsinx = y dove y e l’unico elemento dell’intervallo [−π/2,π/2] tale chesin y = x.
Dal calcolo del seno di alcuni archi noti, si puo dedurre il valore dellafunzione arcoseno in altrettanti punti particolari; infatti, ad esempio,
sin 0 = 0 ⇒ arcsin 0 = 0 ,
sinπ
6=
1
2⇒ arcsin
1
2=π
6,
sinπ
4=
√2
2⇒ arcsin
√2
2=π
4,
sinπ
3=
√3
2⇒ arcsin
√3
2=π
3,
sinπ
2= 1 ⇒ arcsin 1 =
π
2.
Inoltre, poiche la funzione seno ristretta all’intervallo [−π/2,π/2] con-tinua ad essere una funzione dispari, anche la funzione arcoseno e dispari

4.6 Funzioni elementari 105
(infatti se arcsinx = y, allora y ∈ [−π/2,π/2] e sin y = x, da cui segue an-che −y ∈ [−π/2,π/2] e sin(−y) = − sin y = −x; quindi arcsin(−x) = −y =− arcsinx). Nello stesso modo si puo anche riconoscere che la funzionearcoseno e strettamente crescente.
Il grafico della funzione arcoseno e approssimativamente quello tracciatonella Figura 4.16.
-1 1x
yπ-2
-
π-2
Figura 4.16: Funzione arcoseno.
Si procede ora in modo analogo con la funzione coseno. Questa voltasi considera la restrizione della funzione coseno all’intervallo [0,π], la qualee strettamente decrescente e quindi iniettiva. Con lo stesso procedimentoadottato per la funzione arcoseno si puo definire la funzione arcocosenoarccos : [−1, 1] → R ponendo, per ogni x ∈ [−1, 1], arccosx = y dove y el’unico elemento dell’intervallo [0,π] tale che cos y = x.
Si verifica facilmente che la funzione arcocoseno e strettamente decre-scente. Inoltre, come per la funzione arcoseno, dal calcolo del coseno dialcuni archi noti, si puo dedurre il valore della funzione arcocoseno in alcunipunti particolari, che in questo caso per brevita non vengono elencati.
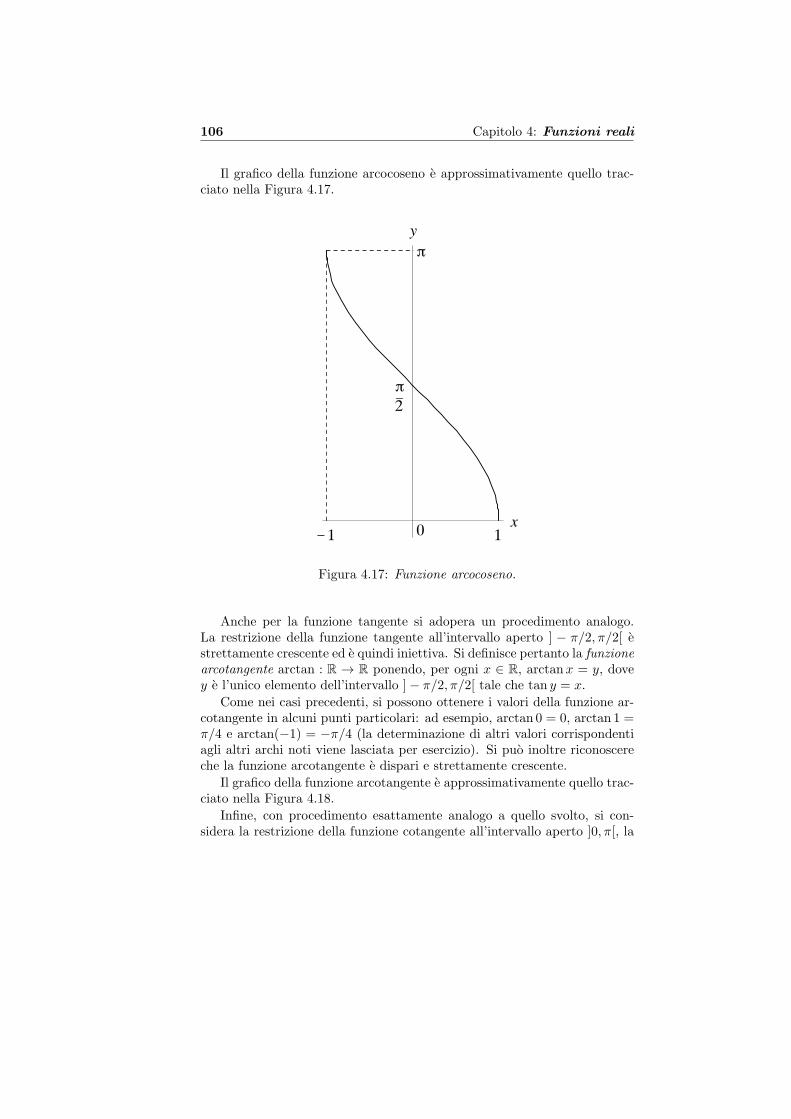
106 Capitolo 4: Funzioni reali
Il grafico della funzione arcocoseno e approssimativamente quello trac-ciato nella Figura 4.17.
-1 1x
y
0
π-2
π
Figura 4.17: Funzione arcocoseno.
Anche per la funzione tangente si adopera un procedimento analogo.La restrizione della funzione tangente all’intervallo aperto ] − π/2,π/2[ estrettamente crescente ed e quindi iniettiva. Si definisce pertanto la funzionearcotangente arctan : R → R ponendo, per ogni x ∈ R, arctanx = y, dovey e l’unico elemento dell’intervallo ]− π/2,π/2[ tale che tan y = x.
Come nei casi precedenti, si possono ottenere i valori della funzione ar-cotangente in alcuni punti particolari: ad esempio, arctan 0 = 0, arctan 1 =π/4 e arctan(−1) = −π/4 (la determinazione di altri valori corrispondentiagli altri archi noti viene lasciata per esercizio). Si puo inoltre riconoscereche la funzione arcotangente e dispari e strettamente crescente.
Il grafico della funzione arcotangente e approssimativamente quello trac-ciato nella Figura 4.18.
Infine, con procedimento esattamente analogo a quello svolto, si con-sidera la restrizione della funzione cotangente all’intervallo aperto ]0,π[, la

4.6 Funzioni elementari 107
x
y
0
-
π-2
π-2
Figura 4.18: Funzione arcotangente.
quale risulta strettamente decrescente e quindi iniettiva. Cio consente di de-finire la funzione arcocotangente arccot : R → R ponendo, per ogni x ∈ R,arccotx = y, dove y e l’unico elemento di ]0,π[ tale che cot y = x. Trale proprieta di questa funzione si segnala il fatto che essa e strettamentedecrescente, e arccot 0 = π/2, arccot 1 = π/4, arccot (−1) = 3π/4.
Il grafico della funzione arcocotangente e approssimativamente quellotracciato nella Figura 4.19.
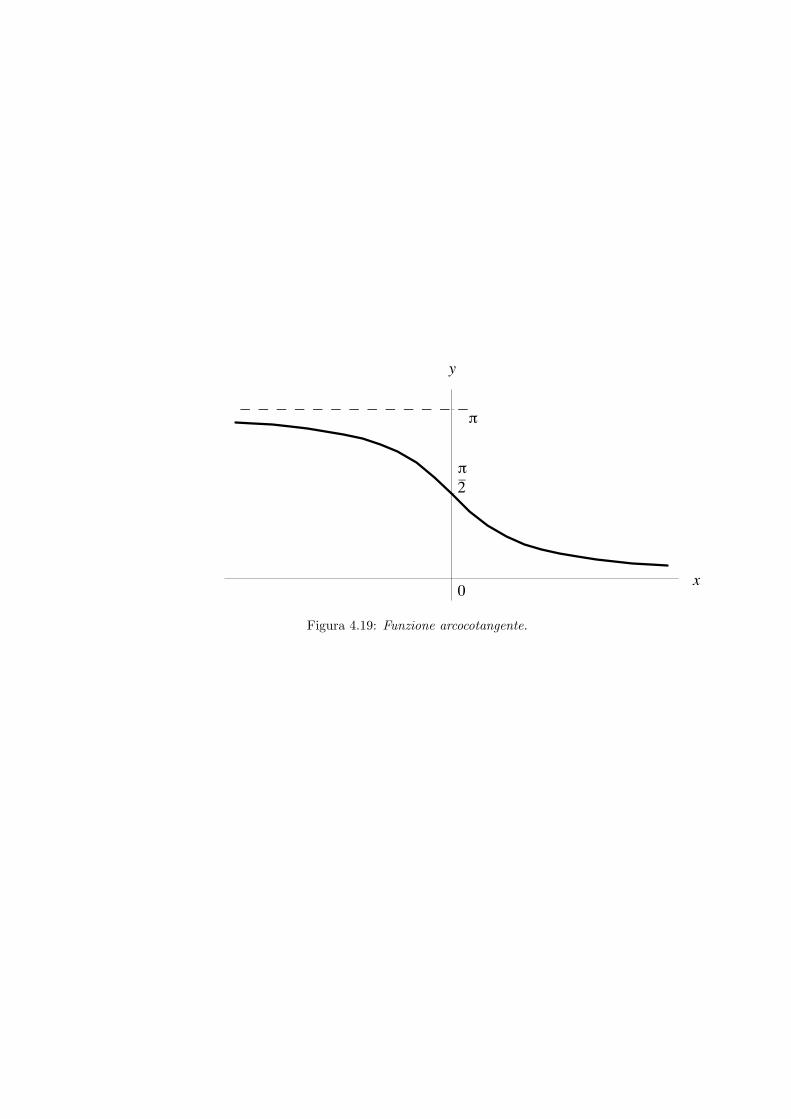
x
y
0
π-2
π
Figura 4.19: Funzione arcocotangente.
Capitolo 5
Alcuni metodi dirisoluzione di equazioni edisequazioni
Siano X ed Y sottoinsiemi di R ed f : X → R e g : Y → R funzioni reali.Un’equazione si presenta nella forma seguente
f(x) = g(x) .
Risolvere la precedente equazione significa determinare l’insieme
S := x ∈ X ∩ Y | f(x) = g(x) .
In maniera analoga, una disequazione si presenta in una delle seguentiforme
f(x) ≤ g(x) , f(x) ≥ g(x) , f(x) < g(x) , f(x) > g(x)
e risolverla significa determinare l’insieme degli elementi di X ∩ Y per cuila diseguaglianza indicata risulta vera.
5.1 Equazioni e disequazioni razionali intere
Un tipo molto semplice di equazioni e disequazioni e costituito da quelle ditipo algebrico. Esse si presentano nella forma
P (x) = 0

110 Capitolo 5: Equazioni e disequazioni
oppure, rispettivamente,
P (x) ≤ 0 , P (x) ≥ 0 , P (x) < 0 , P (x) > 0 ,
con P polinomio.In precedenza ci si e soffermati sulle soluzioni delle equazioni polinomiali
e pertanto ora si prenderanno in considerazione soprattutto le disequazio-ni; ovviamente, queste hanno senso solo per polinomi a coefficienti reali inquanto in C non si possono considerare disequazioni. Passando, se necessa-rio, alla disequazione opposta, nel seguito si potra supporre, qualora lo siritenga conveniente, che il coefficiente della potenza di grado massimo delpolinomio sia strettamente positivo.
Si studiano dapprima i casi piu semplici in cui il grado del polinomio Pe 0, 1 oppure 2 e poi si passa al caso generale.
Si supponga dapprima che P sia un polinomio di grado 0, cioe P (x) = a0per ogni x ∈ R con a0 = 0. In questo caso, se a0 > 0, le disequazioniP (x) ≤ 0 e P (x) < 0 non sono mai soddisfatte per cui S = ∅, mentre ledisequazioni P (x) ≥ 0 e P (x) > 0 sono sempre soddisfatte per cui S = R;il caso a0 < 0 si discute in maniera analoga.
Si considera ora il caso in cui P sia un polinomio di grado 1, cioe P (x) =mx + n per ogni x ∈ R con m,n ∈ R ed m > 0; in questo caso, e facilevedere che le disequazioni in esame hanno rispettivamente come soluzioni iseguenti intervalli: S =]−∞,−n/m], S = [−n/m,+∞[, S =]−∞,−n/m[,S =]− n/m,+∞[. Ad esempio, la disequazione 2x+3¿0, ha come soluzionil’insieme S =]− 3/2,+∞[, mentre la disequazione 3− 4(5− x) ≤ 2x+ 5 hacome soluzioni l’insieme S =]−∞, 11].
Sia ora P (x) = ax2+bx+c un polinomio di secondo grado con a, b, c ∈ Red a > 0. In questo caso bisogna tener presente che:
• Se ∆ > 0, denotate con x1 e x2 le due radici distinte di P con x1 <x2, risulta P (x) ≥ 0 in ] − ∞, x1] ∪ [x2,+∞[ e P (x) ≤ 0 in [x1, x2](se a < 0, si ha ovviamente P (x) ≥ 0 in [x1, x2] e P (x) ≤ 0 in]−∞, x1] ∪ [x2,+∞[).
• Se ∆ = 0, risulta sempre P (x) ≥ 0 e P si annulla solo nell’unica radicex0 = −b/2a (se a < 0, risulta sempre P (x) ≤ 0 e P si annulla solonell’unica radice x0).
• Se∆ < 0, risulta sempre P (x) > 0 (se a < 0, risulta sempre P (x) < 0).
Da quanto osservato si deduce facilmente l’insieme delle soluzioni diognuna delle disequazioni in esame. Ad esempio, la disequazione 2x2 −2x + 1 ≤ 0 non e mai soddisfatta il quanto il polinomio 2x2 − 2x + 1 ha∆ = 4 − 8 = −4 < 0 ed e quindi sempre strettamente positivo. Invece, la

5.1 Equazioni e disequazioni razionali intere 111
disequazione x2 − x− 6 > 0 e soddisfatta in ]−∞,−2[∪]3,+∞[ in quantoil polinomio x2 − x− 6 ha due radici reali −2 e 3.
Si considera, infine, il caso generale. Siano n ∈ N ed a0, . . . , an ∈ R conan = 0 e si consideri il polinomio
P (x) = a0 + a1x+ · · ·+ anxn , x ∈ R .
Essendo a coefficienti reali, il polinomio P si puo decomporre come segue(vedasi la Sezione 3.5.2, formula (3.5.7))
P (x) = an(x− x1)h1 · · · (x− xp)
hp(x2 + b1x+ c1)k1 · · · (x2 + bqx+ cq)
kq ,
dove x1, . . . , xp sono le radici reali di P aventi rispettivamente molteplicitah1, . . . , hp, e k1, . . . , kq sono le molteplicita delle radici complesse coniugatedei termini x2+ b1x+ c1, . . . , x2+ bqx+ cq con ∆1 = b21− 4c1 < 0, . . . ,∆q =b2q − 4cq < 0. Poiche la somma di tutte le molteplicita deve essere n, si deveinfine avere
h1 + · · ·+ hp + 2(k1 + · · ·+ kq) = n .
Per ottenere tale decomposizione, si puo procedere in modo diretto per ipolinomi di grado minore o uguale di 2 (oppure anche per quelli di grado 3e 4), oppure utilizzare la regola di Ruffini per i polinomi di grado superiore.La decomposizione del polinomio e il punto di partenza per lo studio delledisequazioni algebriche. Una volta ottenuta tale decomposizione, si puostudiare il segno di ogni fattore e dedurre poi il segno del prodotto tenendopresente che il prodotto di un numero dispari di numeri negativi e negativoe il prodotto di un numero pari di numeri negativi e un numero positivo.Inoltre, poiche i fattori di secondo grado hanno tutti discriminante negativo,tali fattori hanno tutti segno costante strettamente positivo (in quanto ilcoefficiente di x2 e 1 > 0). Per rendere piu chiaro lo studio dei segni deisingoli fattori, ci si puo avvalere di uno schema grafico utilizzando per ognifattore un tratto continuo per rappresentare gli intervalli in cui e positivoe tratteggiato per gli intervalli in cui e negativo; ad esempio, il segno delfattore x− 1 viene rappresentato come segue
x− 1 ≥ 0 −−−−−−−−−−−− 1•
e quello del fattore x2 − 2x− 3 nel modo seguente
x2−2x−3 ≥ 0−1• −−−−−−−− 3•
In questo modo, il segno del polinomio sara positivo negli intervalli incui vi e un numero pari di fattori negativi e negativo negli intervalli in cui vie un numero dispari di fattori negativi. Alla fine, si considerano gli intervallicorrispondenti al tipo di disequazione richiesta.

112 Capitolo 5: Equazioni e disequazioni
Ad esempio, si consideri la disequazione x3+x2−4x−4 > 0; il polinomioP (x) = x3 + x2 − 4x− 4 si puo decomporre utilizzando la regola di Ruffinicome segue P (x) = (x−2)(x+1)(x+2); nello schema seguente si rappresentail segno di ogni fattore e quello del prodotto:
x− 2 ≥ 0
x+ 1 ≥ 0
x+ 2 ≥ 0
P (x) ≥ 0
− − − − − − − − − − − − − − − − −−−−−−−−−−−−−−−−−−−−−−−−−−•2
− − − − − − − − − − −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
−1
− − − − − − −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
−2
− − − − − − −−−−−−−−−−−−−−−−−−− − − − − − −−−−−−−−−−−−−−−−−−−−−−−−−−•••
Poiche si vuole che il segno di P sia strettamente positivo, alla finevanno considerate le soluzioni date dall’insieme S :=]−2,−1[∪]2,+∞[; nellaseguente rappresentazione geometrica si e convenuto di rappresentare conun cerchietto pieno gli estremi inclusi nell’insieme, o in cui e soddisfatta ladiseguaglianza in esame, e con un cerchietto vuoto i rimanenti estremi.
S −−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−2
−1
−2
Anziche utilizzare i simboli • e spesso si ricorre ai simboli [ e ] con lestesse convenzioni che riguardano gli intervalli; pertanto, l’insieme S si puoanche rappresentare nel modo seguente.
S −−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−]
2
[
−1
]
−2
5.2 Equazioni e disequazioni razionali fratte
Si considerano ora equazioni e disequazioni in cui sono coinvolte funzionirazionali fratte. Si ricorda che una funzione R : X → R definita in unsottoinsieme X di R si dice funzione razionale fratta (oppure semplicementefunzione razionale) se esistono due polinomi P e Q, con Q non nullo, taliche
X := x ∈ R | Q(x) = 0

5.2 Equazioni e disequazioni razionali fratte 113
e inoltre, per ogni x ∈ X,
R(x) :=P (x)
Q(x).
Poiche il polinomio Q ha sempre un numero finito di radici, le funzionirazionali non sono definite al piu in un numero finito di punti.
Per quanto riguarda le equazioni con funzioni razionali, esse si riduconoa quelle polinomiali. Infatti, si ha R(x) = 0 se e solo se P (x) = 0 e Q(x) = 0;bisogna quindi trovare le radici del polinomio P e verificare che in esse nonsi annulli anche il denominatore, nel qual caso la funzione razionale nonrisulterebbe definita. Ad esempio l’equazione
(x− 1)(x− 2)
x2 − x= 0
ha come unica radice l’elemento 2, in quanto l’altra radice 1 del numeratoreannulla anche il denominatore e quindi non ha senso considerare l’equazio-ne in tale punto. Anche lo studio delle disequazioni razionali fratte vienecondotto in modo molto simile a quello delle disequazioni razionali intere.Bisogna innanzitutto decomporre entrambi i polinomi P e Q in fattori diprimo e secondo grado con discriminante minore di 0 e successivamente stu-diare il segno di ogni fattore (sia del numeratore che del denominatore);infine si tiene presente che il segno della funzione razionale sara, come nelcaso delle disequazioni razionali intere, positivo negli intervalli in cui vi e unnumero pari di fattori negativi e negativo negli intervalli in cui vi e un nu-mero dispari di segni negativi. Rispetto al caso polinomiale, nel consideraregli intervalli corrispondenti alla disequazione richiesta, bisogna comunqueescludere i punti in cui si annulla il polinomio Q al denominatore.
Ad esempio, si consideri la disequazione
x− 2
x− 1≤ 2 ;
essa e equivalente ax− 2
x− 1− 2 ≤ 0 ,
e quindi, considerando il minimo comune multiplo,
−xx− 1
≤ 0 .
Pertanto, bisogna studiare i segni di −x e x− 1, da cui si ottiene

114 Capitolo 5: Equazioni e disequazioni
−x ≥ 0
x− 1 ≥ 0
R(x) ≥ 0
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− − − − − − − − − − − − − − − −•0
− − − − − − − − − − − − − − − −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
1
− − − − − − − − −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− − − − − − − − −• •
dove R(x) denota la funzione razionale −x/(x− 1).Poiche nel caso in esame si vuole che R(x) ≤ 0, le soluzioni sono da-
te dall’insieme S :=] − ∞, 0]∪]1,+∞[, che si puo rappresentare nel modoseguente.
S −−−−−−−−−−−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−1
•0
5.3 Sistemi di equazioni e disequazioni
Nelle sezioni successive, si studieranno alcuni casi in cui le equazioni o di-sequazioni in esame possono essere ricondotte ad una o piu equazioni odisequazioni di tipo piu semplice. Quando, in generale, si hanno piu equa-zioni (rispettivamente, disequazioni) che devono essere soddisfatte contem-poraneamente si preferisce parlare di sistemi di equazioni (rispettivamente,sistemi di disequazioni) e raggruppare le disequazioni con una parentesigraffa. Un sistema di equazioni (rispettivamente, disequazioni) si presentanella forma ⎧
⎪⎪⎪⎨
⎪⎪⎪⎩
f1(x) = g1(x) ,f2(x) = g2(x) ,...fn(x) = gn(x)
(rispettivamente, ⎧⎪⎪⎪⎨
⎪⎪⎪⎩
f1(x) ≤ g1(x) ,f2(x) ≤ g2(x) ,...fn(x) ≤ gn(x) ),
con f1 : X1 → R, . . . , fn : Xn → R e g1 : Y1 → R, . . . , gn : Yn → R funzionireali assegnate.

5.3 Sistemi di equazioni e disequazioni 115
Le soluzioni di un sistema di equazioni (rispettivamente, disequazioni)sono date dall’insieme
S := x ∈ X1 ∩ · · · ∩Xn ∩ Y1 ∩ · · · ∩ Yn | f1(x) = g1(x), . . . , fn(x) = gn(x)
(rispettivamente,
S := x ∈ X1∩ · · ·∩Xn∩Y1∩ · · ·∩Yn | f1(x) ≤ g1(x), . . . , fn(x) ≤ gn(x) ).
Quindi, per determinare l’insieme S si determinano separatamente gli insie-mi S1, . . . , Sn di ognuna delle equazioni (rispettivamente, disequazioni) delsistema. Allora l’insieme S e dato da S1 ∩ · · · ∩ Sn. Quanto osservato valeanche per i sistemi misti, che contengono sia equazioni che disequazioni.
Ad esempio, si consideri il sistema⎧⎨
⎩
2x > 5 ,x2 − 5x+ 6 = 0 ,x = 0 .
La prima disequazione ha come soluzioni l’insieme S1 =]5/2,+∞[; la se-conda equazione l’insieme S2 = 2, 3 e la terza l’insieme R∗. Quindi l’insiemeS delle soluzioni del sistema e dato da S = S1 ∩ S2 ∩ S3 = 3.
L’intersezione puo essere facilmente determinata graficamente conside-rando i punti comuni agli insiemi delle soluzioni di ogni disequazione oequazione.
S1
S2
S3
S
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−5/2
•
2
•
3
−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
0
•
Si consideri ora il sistema⎧⎨
⎩
x2 + 5 ≤ 2x2 + 4 ,x4 − 16 < 0 ,2x− 1 > 0 .
L’insieme S1 delle soluzioni della prima disequazione e dato da S1 :=]−∞,−1]∪ [1,+∞[, l’insieme S2 delle soluzioni della seconda disequazione

116 Capitolo 5: Equazioni e disequazioni
e dato da S2 :=] − 2, 2[ ed infine l’insieme S3 delle soluzioni della terzadisequazione e dato da S3 :=]1/2,+∞[. Pertanto, le soluzioni del sistemasono date dall’insieme S := S1 ∩ S2 ∩ S3 = [1, 2[, come si riconosce anchedal grafico seguente.
S1
S2
S3
S
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•−1
•1
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
−2
2
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
1/2
−−−−−−−−−−•
5.4 Equazioni e disequazioni irrazionali
Si considerano innanzitutto equazioni irrazionali del tipo
n√
f(x) = g(x) .
Se n e pari, sia la funzione f che la funzione g devono essere positive,la prima in quanto argomento della radice n-esima, la seconda in quantodeve soddisfare l’uguaglianza prevista; una volta che cio sia stato imposto,si possono elevare primo e secondo membro alla potenza n-esima ed ottenereun’equazione in cui non figura piu la radice n-esima. Se n invece e dispari,non e necessario imporre la positivita delle funzioni f e g e quindi si possonoelevare direttamente alla potenza n-esima entrambi i membri dell’equazione.Si conclude che l’equazione in esame e equivalente al seguente sistema
⎧⎨
⎩
f(x) ≥ 0 ,g(x) ≥ 0 ,f(x) = g(x)n ,
se n e pari, altrimenti e equivalente all’equazione
f(x) = g(x)n
se n e dispari.
Per quanto riguarda le disequazioni irrazionali conviene considerare se-paratamente i seguenti due casi:
n√f(x) ≤ g(x) , f(x) ≤ n
√g(x)

5.4 Equazioni e disequazioni irrazionali 117
(le diseguaglianze strette < al posto di ≤ vengono trattate in maniera ana-loga). Se n e dispari entrambi i tipi di disequazioni sono equivalenti a quelleche si ottengono elevando entrambi i membri alla potenza n-esima. Se n epari, con ragionamento analogo a quello svolto per le equazioni, si riconosceche la prima disequazione in esame e equivalente al sistema
⎧⎨
⎩
f(x) ≥ 0 ,g(x) ≥ 0 ,f(x) ≤ g(x)n ,
mentre la seconda e equivalente ai due sistemi
f(x) ≤ 0 ,g(x) ≥ 0 ,
⎧⎨
⎩
f(x) ≥ 0 ,g(x) ≥ 0 ,f(x)n ≤ g(x) ,
nel senso che le soluzioni della disequazione sono date dall’unione dellesoluzioni dei due sistemi.
Ad esempio, si consideri la disequazione√x2 − x− 2 < x+ 1 .
In base alla discussione precedente, essa e equivalente al sistema⎧⎨
⎩
x2 − x− 2 ≥ 0 ,x+ 1 ≥ 0 ,x2 − x− 2 < x2 + 2x+ 1 ;
denotati con S1, S2 e rispettivamente S3 gli insieme delle soluzioni dellaprima, seconda e rispettivamente terza disequazione, si ottiene facilmente
S1 =]−∞,−1[∪[2,+∞[ , S2 = [−1,+∞[ , S3 =]− 1,+∞[
e conseguentemente la disequazione assegnata e soddisfatta nell’insieme S =S1 ∩ S2 ∩ S3 = [2,+∞[.
S1
S2
S3
S
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•−1
•2
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•

118 Capitolo 5: Equazioni e disequazioni
Al contrario, la disequazione opposta
√x2 − x− 2 > x+ 1
e equivalente ai due sistemi
x2 − x− 2 ≥ 0 ,x+ 1 < 0 ,
⎧⎨
⎩
x2 − x− 2 ≥ 0 ,x+ 1 ≥ 0 ,x2 − x− 2 > x2 + 2x+ 1 ;
in base alla discussione precedente, si riconosce facilmente che il primo si-stema ha come soluzioni l’insieme S′ =]−∞,−1[, mentre il secondo sistemanon e mai soddisfatto (S′′ = ∅); allora le soluzioni della disequazione sonodate da S = S′∪S′′ =]−∞,−1[ (si osservi che in questo caso alla fine vieneconsiderata l’unione delle soluzioni dei due sistemi).
Come ulteriore esempio, si consideri la disequazione
2− x <√x2 − 1 ;
essa e ancora una volta equivalente ai due sistemi
2− x < 0 ,x2 − 1 ≥ 0 ,
⎧⎨
⎩
2− x ≥ 0 ,x2 − 1 ≥ 0 ,4− 4x+ x2 < x2 − 1 .
Per quanto riguarda il primo sistema, la prima disequazione e soddisfattain S′
1 =]2,+∞[ e la seconda in S′2 =]−∞,−1]∪ [1,+∞[, per cui le soluzioni
del primo sistema sono date dall’insieme S′ =]2,+∞[.
S′1
S′2
S′
−−−−−−−−−−−−−−−−−−−2
−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
−1
•
1
−−−−−−−−−−−−−−−−−−−
Il secondo sistema ha invece come soluzioni l’insieme S′′ =]5/4, 2], inquanto la prima disequazione e soddisfatta in S′′
1 =] −∞, 2], la seconda inS′′2 =]−∞,−1] ∪ [1,+∞[ e la terza in S′′
3 =]5/4,+∞[.
5.5 Equazioni e disequazioni con valore assoluto 119
S′′1
S′′2
S′′3
S′′
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•2
−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
−1
•
1
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
5/4
−−−−−−−−−−−−− •
Si conclude che le soluzioni della disequazione assegnata sono date dal-l’insieme S = S1 ∪ S2 =]5/4,+∞[.
S′
S′′
S
−−−−−−−−−−−−−−−−−−−2
−−−−−−−−−−−−− •
5/4
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
5.5 Equazioni e disequazioni con valore asso-luto
Per ogni x ∈ R, il valore assoluto |x| di x e definito ponendo
|x| :=
x , x ≥ 0 ;−x , x < 0 .
Un’equazione del tipo|f(x)| = g(x) ,
con f e g funzioni reali assegnate, puo essere ricondotta facilmente ad unsistema di equazioni e disequazioni in cui non compare piu il valore assoluto.Infatti, tenendo presente che deve essere necessariamente g(x) ≥ 0 in quantoil valore assoluto a primo membro e positivo, le soluzioni sono date dai duesistemi:
g(x) ≥ 0 ,f(x) = g(x) ,
g(x) ≥ 0 ,f(x) = −g(x) .
Ad esempio, l’equazione
|x2 + x+ 1| = x2 − 3x+ 2

120 Capitolo 5: Equazioni e disequazioni
ha come soluzioni quelle dei due sistemi
x2 − 3x+ 2 ≥ 0 ,x2 + x+ 1 = x2 − 3x+ 2 ,
x2 − 3x+ 2 ≥ 0 ,x2 + x+ 1 = −(x2 − 3x+ 2) .
Il primo di essi e soddisfatto in S1 = (]−∞, 1]∪[2,+∞[)∩1/4 = 1/4;il secondo invece non ha soluzioni in quanto l’equazione x2+x+1 = −(x2−3x+2), equivalente a 2x2−2x+3 = 0 non e mai soddisfatta. Si conclude chel’equazione assegnata ammette come unica soluzione il punto x = 1/4.
Alternativamente, l’equazione |f(x)| = g(x) puo essere risolta anche di-stinguendo i casi in cui f(x) e positivo o negativo e utilizzando la definizionedi valore assoluto. In tal modo le soluzioni sono date dai due sistemi:
f(x) ≥ 0 ,f(x) = g(x) ,
f(x) < 0 ,−f(x) = g(x) ,
che sono ovviamente equivalenti a quelli considerati.
Si considerano ora le disequazioni che coinvolgono il valore assoluto.Innanzitutto conviene considerare separatamente quelle che si presenta-
no nella forma|f(x)| ≤ g(x) ,
da quelle del tipof(x) ≤ |g(x)|
(nel caso di diseguaglianze strette i metodi di risoluzione sono del tuttoanaloghi e pertanto per brevita vengono omessi).
Tenendo presente che la disequazione |x| ≤ a non e mai soddisfatta sea < 0 ed e soddisfatta per −a ≤ x ≤ a se a ≥ 0, la prima disequazione eequivalente al seguente sistema
⎧⎪⎪⎨
⎪⎪⎩
g(x) ≥ 0 ,
−g(x) ≤ f(x) ,
f(x) ≤ g(x) ,
in cui non e piu coinvolto il valore assoluto.
Alternativamente, si ottengono le stesse soluzioni tenendo presente ladefinizione di valore assoluto e distinguendo i casi in cui f(x) ≥ 0 e f(x) < 0.In tal modo le soluzioni della prima disequazione sono date dai seguenti duesistemi:
f(x) ≥ 0 ,f(x) ≤ g(x) ,
f(x) < 0 ,−f(x) ≤ g(x) .

5.5 Equazioni e disequazioni con valore assoluto 121
Analogamente, tenendo presente che la disequazione a ≤ |x| e sempresoddisfatta se a < 0 ed e soddisfatta sia per x ≥ a che per x ≤ −a se a ≥ 0,allora la seconda disequazione in esame e equivalente ai seguenti tre sistemi(nel senso che l’insieme delle soluzioni e dato dall’unione degli insiemi dellesoluzioni dei tre sistemi)
f(x) < 0 ,x ∈ Xg ;
f(x) ≥ 0 ,g(x) ≥ f(x) ;
f(x) ≥ 0 ,g(x) ≤ −f(x) ,
dove nel primo sistema si e denotato con Xg l’insieme di definizione dellafunzione g (infatti la condizione f(x) < 0 assicura la validita di f(x) ≤ |g(x)|purche anche la funzione g sia definita in x).
Anche ora si ottengono le stesse soluzioni distinguendo i casi in cuig(x) ≥ 0 e g(x) < 0. In tal modo le soluzioni della seconda disequazionesono date dai seguenti due sistemi:
g(x) ≥ 0 ,f(x) ≤ g(x) ,
g(x) < 0 ,f(x) ≤ −g(x) .
Ad esempio, si consideri la disequazione |x2 − 9x + 7| ≤ 7. Da quantoosservato, essa si riconduce al sistema
⎧⎪⎪⎨
⎪⎪⎩
7 ≥ 0 ,
x2 − 9x+ 7 ≤ 7 ,
−7 ≤ x2 − 9x+ 7 .
La prima disequazione e sempre soddisfatta (S1 = R). La seconda sipuo scrivere x2 − 9x + 14 ≥ 0; poiche ∆ = 25, si hanno due radici x1 = 2e x2 = 7 e la disequazione e soddisfatta per x ≤ 2 o per x ≥ 7, cioe inS2 =] −∞, 2] ∪ [7,+∞[. L’ultima disequazione si scrive come x2 − 9x ≤ 0e quindi e soddisfatta in S3 = [0, 9]. Quindi la disequazione assegnata hacome soluzioni l’insieme S = [0, 2] ∪ [7, 9].
S1
S2
S3
S
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
2
•
7
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
0
•
9
−−−−−−−−−−• • −−−−−−−−−−• •

122 Capitolo 5: Equazioni e disequazioni
Si consideri ora la disequazione
x+ 1 < |x2 − 3x− 8| ,
che in base alla discussione effettuata, si riconduce ai tre sistemi
x+ 1 < 0 ,
x+ 1 ≥ 0 ,x2 − 3x− 8 < −x− 1 ,
x+ 1 ≥ 0 ,x+ 1 < x2 − 3x− 8 .
Il primo sistema ha come soluzioni l’insieme S′ =]−∞,−1[.Per quanto riguarda il secondo sistema, la disequazione x + 1 ≥ 0 e
soddisfatta per x ≥ −1, e la disequazione x2−3x−8 < −x−1 e equivalentea x2 − 2x− 7 < 0; si hanno due soluzioni x1 = 1− 2
√2 e x2 = 1+ 2
√2 e la
disequazione e soddisfatta per 1− 2√2 < x < 1 + 2
√2; pertanto il secondo
sistema ha come soluzioni l’insieme S′′ = [−1, 1 + 2√2[.
Infine, la prima disequazione x + 1 ≥ 0 del terzo sistema e soddisfattaper x ≥ −1; la seconda disequazione x + 1 < x2 − 3x − 8 e equivalente ax2−4x−9 > 0; si hanno due soluzioni x3 = 2−
√13 e x4 = 2+
√13, e quindi
la disequazione e soddisfatta per x < 2−√13 e per x > 2+
√13; pertanto il
terzo sistema ha come soluzioni l’insieme S′′′ =]2+√13,+∞[. Concludendo,
le soluzioni della disequazione iniziale sono date da S = S1 ∪ S2 ∪ S3 =]−∞, 1 + 2
√2[∪]2 +
√13,+∞[.
S′
S′′
S′′′
S
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−1
−−−−−−−−−−−−−−−−−−−−−−−−−−−−•
1+2√2
−−−−−−−−−−−−−−−−−−−−−−−−−
1+√13
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− −−−−−−−−−−−−−−−−−−−−−−−−−
5.6 Metodo grafico
Si considerano ora alcuni tipi di equazioni e disequazioni in cui sono coin-volte funzioni esponenziali, logaritmiche, trigonometriche e trigonometricheinverse.
Uno dei metodi piu semplici per la risoluzione di tali equazioni consistenel confrontare i grafici delle funzioni che compaiono al primo ed al secondomembro della disequazione in esame e dedurre da tale grafico l’insieme delle
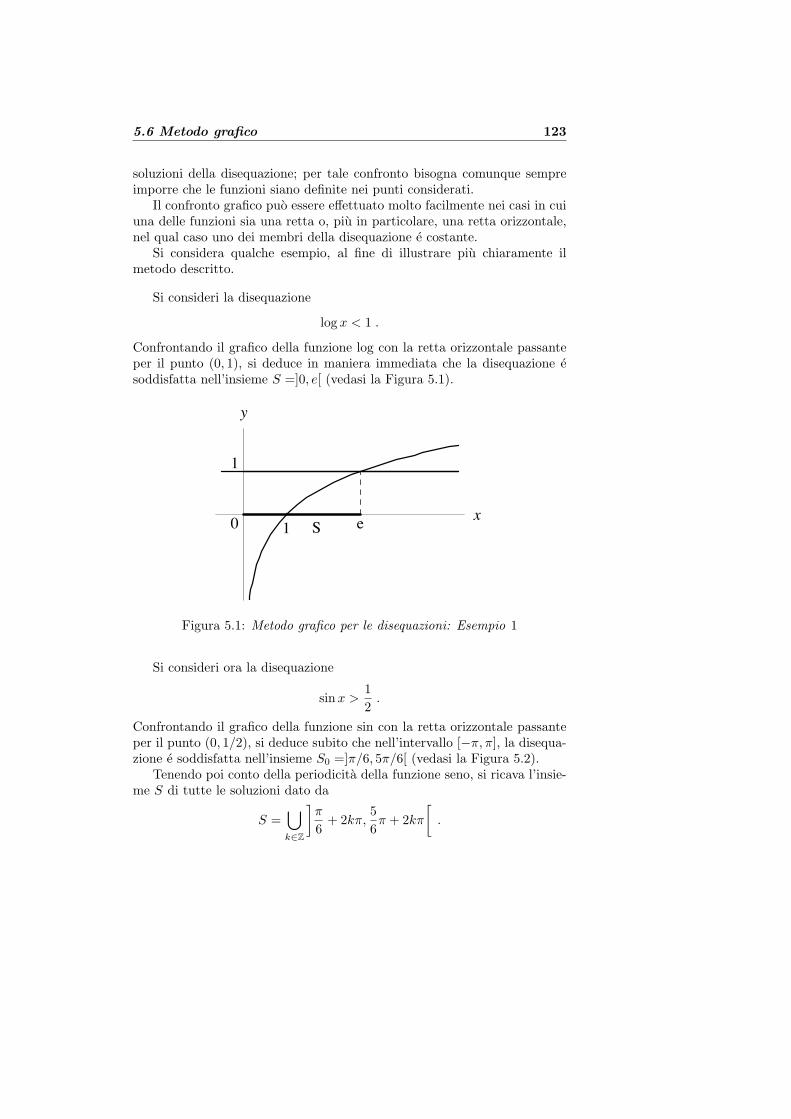
5.6 Metodo grafico 123
soluzioni della disequazione; per tale confronto bisogna comunque sempreimporre che le funzioni siano definite nei punti considerati.
Il confronto grafico puo essere effettuato molto facilmente nei casi in cuiuna delle funzioni sia una retta o, piu in particolare, una retta orizzontale,nel qual caso uno dei membri della disequazione e costante.
Si considera qualche esempio, al fine di illustrare piu chiaramente ilmetodo descritto.
Si consideri la disequazione
log x < 1 .
Confrontando il grafico della funzione log con la retta orizzontale passanteper il punto (0, 1), si deduce in maniera immediata che la disequazione esoddisfatta nell’insieme S =]0, e[ (vedasi la Figura 5.1).
1x
y
1
e0 S
Figura 5.1: Metodo grafico per le disequazioni: Esempio 1
Si consideri ora la disequazione
sinx >1
2.
Confrontando il grafico della funzione sin con la retta orizzontale passanteper il punto (0, 1/2), si deduce subito che nell’intervallo [−π,π], la disequa-zione e soddisfatta nell’insieme S0 =]π/6, 5π/6[ (vedasi la Figura 5.2).
Tenendo poi conto della periodicita della funzione seno, si ricava l’insie-me S di tutte le soluzioni dato da
S =⋃
k∈Z
]π
6+ 2kπ,
5
6π + 2kπ
[.

124 Capitolo 5: Equazioni e disequazioni
-π πx
y
0 S0
Figura 5.2: Metodo grafico per le disequazioni: Esempio 2
Si prende ora in esame la disequazione
arcsinx ≤ π
6.
Confrontando il grafico della funzione arcsin con la retta orizzontale passan-te per il punto (0,π/6), si deduce subito che la disequazione e soddisfattanell’insieme S = [−1, 1/2[ (vedasi la Figura 5.3).
-1 1x
yπ-2
-
π-2
π-6
1-2
Figura 5.3: Metodo grafico per le disequazioni: Esempio 3
Piu generale, il metodo descritto negli esempi precedenti puo essere ap-plicato anche nei casi in cui il confronto non sia necessariamente con una

5.6 Metodo grafico 125
retta; in tali casi l’utilizzo del calcolo differenziale puo essere utile per ladimostrazione di qualche diseguaglianza. Inoltre, il teorema degli zeri puoanche essere utilizzato per una determinazione approssimata delle soluzioni,nei casi in cui non sia possibile descrivere le soluzioni in maniera precisa.
Ad esempio, si consideri la seguente disequazione:
x4 + ex ≤ 1 .
x
y
0
S
Figura 5.4: Metodo grafico per le disequazioni: Esempio 4
Confrontando i grafici della funzione 1−ex e della funzione x4 (vedasi laFigura 5.4), si riconosce subito che tali funzioni assumono lo stesso valore inun punto x0 < 0 e in 0 e conseguentemente, le soluzioni della disequazioneassegnata sono date dall’insieme S =]x0, 0[. Il punto x0 non puo esseredeterminato in modo preciso, tuttavia esso e sicuramente compreso tra −1e −1/2 in quanto nel punto −1/2 la disequazione e soddisfatta (come siverifica direttamente), mentre nel punto −1 non lo e.

Capitolo 6
Limiti delle funzioni reali
6.1 Definizione generale di limite
Lo studio dei limiti delle funzioni reali costituisce uno strumento utile perla conoscenza delle proprieta locali di una funzione reale assegnata.
Per comodita, viene considerato il caso di funzioni definite in sottoinsie-mi arbitrari di R; tuttavia, quando l’esposizione di alcuni argomenti potrarisultare semplificata, ci si limitera a considerare il caso piu significativo difunzioni definite in un intervallo.
Si espone dapprima la definizione generale di limite di una funzionereale in un punto e, dopo averne visto alcune proprieta, si considereranno irisultati piu importanti riguardanti il calcolo dei limiti.
Definizione 6.1.1 Siano X un sottoinsieme non vuoto di R, x0 ∈ R unpunto di accumulazione per X ed ℓ ∈ R. Se f : X → R e una funzione realedefinita in X, si dice che ℓ e il limite di f in x0, oppure che f tende versoℓ per x tendente verso x0, e si scrive
limx→x0
f(x) = ℓ
“il limite di f(x) per x tendente verso x0 e uguale a ℓ” se e verificata laseguente condizione:
∀ I ∈ I(ℓ) ∃ J ∈ I(x0) t.c. ∀ x ∈ X ∩ J " x0 : f(x) ∈ I . (6.1.1)
La lettera x che compare nella notazione del limite e “muta” nel sensoche essa puo essere sostituita con una qualsiasi altra lettera che non sia giastata utilizzata nello stesso contesto.

128 Capitolo 6: Limiti delle funzioni reali
Una funzione che ammette un limite ℓ ∈ R in un punto x0 ∈ R viene spes-so denominata convergente in x0; se, invece, ammette come limite +∞ oppu-re −∞ viene denominata divergente (positivamente oppure negativamente)in x0.
Per poter considerare il limite di una funzione in un punto x0 e dunquenecessario che il punto x0 sia di accumulazione per l’insieme di definizionedella funzione. Tale ipotesi, infatti, assicura che l’intersezione X ∩J " x0sia non vuota per ogni intorno J di x0 e quindi che gli elementi x ∈ X ∩J " x0 verificanti la (6.1.1) esistano effettivamente.
Naturalmente, se x0 = +∞ oppure x0 = −∞, l’ipotesi che esso sia diaccumulazione per X, significa esattamente che X non e limitato superior-mente oppure rispettivamente inferiormente.
Nel caso in cui x0 ∈ R, inoltre, conviene precisare subito che non haalcuna importanza, ai fini del limite, il fatto che la funzione sia definita omeno nel punto x0; nel caso lo sia, poi, non vi e alcuna relazione tra il valoref(x0) che f assume nel punto x0 ed il limite della funzione in tale punto(in seguito, avranno un ruolo importante le funzioni f : X → R che inpunto x0 ∈ X hanno limite uguale proprio ad f(x0); tali funzioni verrannodenominate continue in x0).
La definizione generale di limite vale sia nel caso in cui x0 ed ℓ siano realio infiniti. Nelle applicazioni, tuttavia, in cui x0 ed ℓ sono noti, la Definizione(6.1.1) puo essere precisata meglio tenendo conto della definizione adottatadi intorno di un numero reale o degli elementi +∞ e −∞.
Nel caso in cui sia noto che ℓ ∈ R, gli intorni di ℓ possono essere con-siderati del tipo Iε(x0) (vedasi la (2.3.1) a pag. 42) al variare di ε > 0(infatti, ogni Iε(x0) e un intorno di ℓ e viceversa ogni intorno di ℓ contieneun intervallo Iε(x0)); pertanto, la condizione (6.1.1) si puo scrivere comesegue:
∀ ε > 0 ∃ J ∈ I(x0) t.c. ∀ x ∈ X ∩ J " x0 : ℓ− ε < f(x) < ℓ+ ε .
Nei casi in cui ℓ = +∞ (rispettivamente, ℓ = −∞), ragionando comesopra si possono considerare intorni di ℓ del tipo ]M,+∞[ (e rispettivamente]−∞,M [) e quindi la condizione (6.1.1) si puo scrivere come segue:
∀ M ∈ R ∃ J ∈ I(x0) t.c. ∀ x ∈ X ∩ J " x0 : M < f(x)
(rispettivamente, ∀ x ∈ X ∩ J " x0 : f(x) < M ).
Le stesse osservazioni appena svolte per l’elemento ℓ valgono anche peril punto di accumulazione x0.
Ritornando al caso generale ℓ ∈ R, se x0 ∈ R, la condizione (6.1.1)equivale alla seguente
∀ I ∈ I(ℓ) ∃ δ > 0 t.c. ∀ x ∈ X ∩ Iδ(x0)" x0 : f(x) ∈ I ,

6.2 Prime proprieta dei limiti 129
mentre, se x0 = +∞ (rispettivamente, x0 = −∞), diventa
∀ I ∈ I(ℓ) ∃ c ∈ R t.c. ∀ x ∈ X∩]c,+∞[ : f(x) ∈ I ,
(rispettivamente, ∀ x ∈ X∩]−∞, c[ : f(x) ∈ I ).
Nei casi in cui siano noti sia ℓ che x0 si possono applicare entrambele considerazioni precedenti. Cosı, ad esempio, se ℓ ∈ R, x0 ∈ R, si halimx→x0 f(x) = ℓ se e solo se
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ X ∩ Iδ(x0)" x0 : ℓ− ε < f(x) < ℓ+ ε ,
mentre, si ha limx→−∞ f(x) = +∞ se e solo se
∀ M ∈ R ∃ c ∈ R t.c. ∀ x ∈ X : x < c⇒ f(x) > M .
6.2 Prime proprieta dei limiti
La definizione di limite data nella sezione precedente e pienamente giustifi-cata dal seguente teorema di unicita.
Teorema 6.2.1 (Teorema di unicita del limite)Siano X un sottoinsieme non vuoto di R, x0 ∈ R un punto di accumulazioneper X ed f : X → R una funzione reale. Se ℓ1 ∈ R, ℓ2 ∈ R e
limx→x0
f(x) = ℓ1 , limx→x0
f(x) = ℓ2 ,
allora necessariamente ℓ1 = ℓ2.
Dimostrazione. Si supponga, per assurdo, che ℓ1 = ℓ2. Allora si possono trovare unintorno I1 ∈ I(ℓ1) ed un intorno I2 ∈ I(ℓ2) tali che I1 ∩ I2 = ∅.
Dalle ipotesi segue da un lato l’esistenza di un intorno J1 ∈ I(x0) tale che, per ogni
x ∈ X ∩ J1 " x0, f(x) ∈ I1, e dall’altro l’esistenza di un ulteriore intorno J2 ∈ I(x0)
tale che, per ogni x ∈ X ∩ J2 " x0, f(x) ∈ I2. Si consideri ora J = J1 ∩ J2; tale
insieme e anch’esso un intorno di x0 e poiche x0 e un punto di accumulazione per X,
deve essere X ∩ J " x0 = ∅. Si considera un qualsiasi elemento x ∈ X ∩ J " x0, si hasia x ∈ X ∩ J1 " x0, da cui f(x) ∈ I1 ed anche x ∈ X ∩ J2 " x0, da cui f(x) ∈ I2;
dunque f(x) ∈ I1 ∩ I2 e cio e escluso dal fatto che gli intorni I1 ed I2 sono disgiunti. #
Altre proprieta, di immediata verifica, sono elencate di seguito.
Proposizione 6.2.2 Siano X un sottoinsieme non vuoto di R, x0 ∈ R unpunto di accumulazione per X, ℓ ∈ R ed f : X → R una funzione reale taleche limx→x0 f(x) = ℓ.
Allora valgono le seguenti proprieta:

130 Capitolo 6: Limiti delle funzioni reali
1. (Limitatezza locale) Se ℓ ∈ R ∪ +∞ (rispettivamente, ℓ ∈ R ∪−∞), allora f e limitata inferiormente (rispettivamente, superior-mente) in un intorno di x0, cioe esistono M0 ∈ R ed un intorno J0di x0 tali che, per ogni x ∈ X ∩ J0, M0 ≤ f(x) (rispettivamente,f(x) ≤M0).
In particolare, se ℓ ∈ R allora f e limitata in un intorno di x0, cioeesistono m0,M0 ∈ R ed un intorno J0 di x0 tali che, per ogni x ∈X ∩ J0, m0 ≤ f(x) ≤M0.
2. (Permanenza del segno)
i) Se ℓ ∈]0,+∞[∪+∞ (rispettivamente, ℓ ∈] − ∞, 0[∪−∞)esistono un numero reale r > 0 ed un intorno J0 di x0 tali che, perogni x ∈ X ∩ J0 " x0, f(x) ≥ r (rispettivamente, f(x) ≤ −r0).
ii) Viceversa, se esiste un intorno J0 di x0 tale che, per ognix ∈ X ∩ J0 " x0, si ha f(x) ≥ 0 (rispettivamente, f(x) ≤ 0) allorasi ha anche ℓ ∈ [0,+∞[∪+∞ (rispettivamente, ℓ ∈]−∞, 0]∪−∞).
iii) Se, per ogni intorno J di x0, esistono x1 ∈ X ∩ J " x0 ex2 ∈ X ∩ J " x0 tali che f(x1) ≥ 0, f(x2) ≤ 0, allora deve esserenecessariamente ℓ = 0.
iv) Se, per ogni intorno J di x0, esiste x ∈ X ∩ J " x0 tale chef(x) = 0, allora deve essere necessariamente ℓ = 0.
3. (Monotonia del limite)
Si supponga che g : X → R sia un’ulteriore funzione reale tale chelimx→x0 g(x) = ℓ′ con ℓ′ ∈ R.Allora, se ℓ < ℓ′, esiste un intorno J0 di x0 tale che, per ogni x ∈X ∩ J0 " x0, f(x) < g(x).
Viceversa, se esiste un intorno J0 di x0 tale che, per ogni x ∈ X ∩J0 " x0, f(x) ≤ g(x), deve essere necessariamente ℓ ≤ ℓ′.
Dimostrazione. Si dimostra innanzitutto la proprieta 1. Si supponga ℓ ∈ R ∪ +∞;se ℓ ∈ R si pone I = [ℓ − 1,+∞[ mentre se ℓ = +∞ si pone I = [0,+∞[. Tenendopresente che I e un intorno di ℓ, applicando la definizione di limite a tale intorno, siottiene un intorno J0 di x0 tale che, per ogni x ∈ X ∩ J0 " x0, ℓ− 1 ≤ f(x) se ℓ ∈ R e0 ≤ f(x) se ℓ = +∞. A questo punto se x0 /∈ X e sufficiente porre M0 = ℓ− 1 se ℓ ∈ Re M0 = 0 se ℓ = +∞; se invece x0 ∈ X, si puo porre M0 = minℓ − 1, f(x0) se ℓ ∈ Re M0 = min0, f(x0) se ℓ = +∞ e la tesi e verificata in ogni caso. Il caso rispettivo sidimostra analogamente e infine se ℓ ∈ R basta applicare contemporaneamente sia il casodimostrato che quello rispettivo.
Si dimostra ora la 2. Si considera dapprima la proprieta i). Se ℓ ∈]0,+∞[ si poner = |ℓ|/2 mentre se ℓ = +∞ si pone r = 1; applicando la definizione di limite all’intornoI := [r,+∞[ di ℓ si ottiene interamente la tesi. Il caso rispettivo e analogo.

6.2 Prime proprieta dei limiti 131
Per quanto riguarda la ii), si supponga che esista un intorno J0 di x0 tale che, perogni x ∈ X ∩ J0 " x0, f(x) ≥ 0. Se fosse per assurdo ℓ < 0 oppure ℓ = −∞, dallaproprieta i) esisterebbero r > 0 ed un intorno J1 di x0 tali che, per ogni x ∈ X∩J1"x0,f(x) ≤ −r. Considerato x ∈ X∩(J0∩J1)"x0 si avrebbe contemporaneamente f(x) ≥ 0e f(x) ≤ −r e cio e assurdo. Quindi deve essere ℓ ≥ 0 oppure ℓ = +∞.
Infine, le proprieta iii) e iv) seguono anch’esse dalla i) procedendo per assurdo.
Per quanto riguarda la 3., si supponga dapprima ℓ < ℓ′. Allora si possono consideraredue intervalli disgiunti I ∈ I(ℓ) e I′ ∈ I(ℓ′); quindi, per ogni y ∈ I e per ogni y′ ∈ I′, siha y < y′. Applicando la definizione di limite, si ottiene l’esistenza di un intorno Jdix0
tale che, per ogni x ∈ X ∩ J " x0, f(x) ∈ I ed un intorno J ′ di x0 tale che, per ognix ∈ X ∩ J ′ " x0, g(x) ∈ I′. Si consideri ora l’insieme J0 = J ∩ J ′; esso e un intorno dix0 e, per ogni x ∈ X ∩ J0 " x0, risulta f(x) < g(x) in quanto f(x) ∈ I e g(x) ∈ I′.
Viceversa, si supponga che esista un intorno J0 di x0 tale che, per ogni x ∈ X ∩J0 " x0, f(x) ≤ g(x). Se, per assurdo, fosse ℓ′ < ℓ, dalla prima parte dimostrata si
dedurrebbe l’esistenza di un intorno J1 di x0 tale che, per ogni x ∈ X ∩ J1 " x0, siabbia g(x) < f(x). Considerato x ∈ X∩(J0∩J1)"x0 si avrebbe contemporaneamente
f(x) ≤ g(x) e f(x) > g(x) e cio e assurdo. Quindi deve essere ℓ ≤ ℓ′. #
Un’altra proprieta importante del limite di una funzione riguarda il suocarattere locale.
Si considerino due funzioni reali f, g : X → R e sia x0 ∈ R un puntodi accumulazione per X. Se esiste un intorno J0 di x0 tale che, per ognix ∈ X ∩ J0 " x0, si abbia f(x) = g(x) allora il limite di f in x0 esiste see solo se esiste il limite di g in x0 e in tal caso i due limiti coincidono (taleproprieta si esprime semplicemente affermando che i limiti limx→x0 f(x) elimx→x0 g(x) sono equivalenti).
Infatti si supponga che limx→x0 f(x) = ℓ con ℓ ∈ R. Se I ∈ I(ℓ), allora esiste un intorno
J1 di x0 tale che, per ogni x ∈ X ∩ J1 " x0, risulti f(x) ∈ I. Posto J = J0 ∩ J1si ha
che J e un intorno di x0 e, per ogni x ∈ X ∩ J1 " x0, si ha g(x) = f(x) ∈ I. Quindi
si ha limx→x0 f(x) = ℓ. Analogamente si riconosce che se limx→x0 g(x) = ℓ allora anche
limx→x0 f(x) = ℓ e quindi la tesi e vera.
Dalla proprieta precedente segue che e equivalente considerare il limitedi una funzione f : X → R in un punto di accumulazione x0 ∈ R per X equello della sua restrizione f|X∩J0
ad un intorno J0 di x0. Quindi i limitilimx→x0 f(x) e limx→x0 f|X∩J0
(x) sono equivalenti nel senso che uno esistese e solo se esiste anche l’altro e in tal caso sono uguali.
Viceversa se A e un sottoinsieme di X tale che x0 sia ancora di accumu-lazione per A, non si puo affermare in generale che se limx→x0 f|A(x) = ℓallora anche limx→x0 f(x) = ℓ. I due limiti limx→x0 f|A(x) e limx→x0 f(x)sono equivalenti nel caso in cui A soddisfi la seguente condizione:
∃ J0 ∈ I(x0) t.c. X ∩ J0 " x0 = A ∩ J0 " x0
(quindi A contiene tutti i punti appartenenti ad X in J0 " x0).

132 Capitolo 6: Limiti delle funzioni reali
6.3 Limiti destri e sinistri
Il calcolo del limite di una funzione in un punto si rivelera uno strumento es-senziale per lo studio delle funzioni condotto a partire dal presente capitolo.In alcuni casi, tuttavia, tale limite non esiste e quindi ha senso investigarese sono verificate almeno proprieta piu deboli. In questo ambito si inseriscela ricerca dei limiti da destra e da sinistra, come precisato dalla seguentedefinizione.
Definizione 6.3.1 Siano X un sottoinsieme non vuoto di R, x0 ∈ R unpunto di accumulazione a destra (rispettivamente, a sinistra) per X, ℓ ∈ Red f : X → R una funzione reale.
Si dice che ℓ e il limite destro (rispettivamente, sinistro) di f in x0, op-pure che f tende verso ℓ per x tendente verso x0 da destra (rispettivamente,da sinistra), e si scrive
limx→x+
0
f(x) = ℓ , (rispettivamente, limx→x−
0
f(x) = ℓ )
(si legge “il limite di f(x) per x tendente verso x0 da destra e uguale adℓ” (rispettivamente, il limite di f(x) per x tendente verso x0 da sinistra euguale ad ℓ”)) se e verificata la seguente condizione
∀ I ∈ I(ℓ) ∃ J ∈ I+(x0) t.c. ∀ x ∈ X ∩ J " x0 : f(x) ∈ I (6.3.1)
(rispettivamente,∃ J ∈ I−(x0) t.c. ∀ x ∈ X ∩ J " x0 : f(x) ∈ I ).
Tenendo presente che x0 ∈ R e che ogni intorno destro (rispettivamente,sinistro) di x0 contiene un intervallo [x0, x0+δ[ (rispettivamente, ]x0−δ, x0]),la condizione (6.3.1) e equivalente alla seguente:
∀ I ∈ I(ℓ) ∃ δ > 0 t.c. ∀ x ∈ X∩]x0, x0 + δ[: f(x) ∈ I (6.3.2)
(rispettivamente,∀ x ∈ X∩]x0 − δ, x0[: f(x) ∈ I ).
Ovviamente, nei casi in cui e possibile precisare se ℓ ∈ R oppure ℓ = ±∞,valgono le stesse considerazioni relative alla definizione generale di limite(6.1.1).
Sostanzialmente, calcolare il limite destro (rispettivamente, sinistro) inun punto x0 significa considerare solamente i valori della funzione a de-stra (rispettivamente, a sinistra) di x0; precisamente, nelle ipotesi dellaDefinizione 6.3.1, i seguenti limiti
limx→x+
0
f(x) , limx→x0
f|X∩]x0,+∞[(x) , (6.3.3)
(rispettivamente, limx→x−
0
f(x) , limx→x0
f|X∩]−∞,x0[(x) )

6.3 Limiti destri e sinistri 133
sono equivalenti (cioe uno dei due limiti esiste se e solo se esiste anche l’altroe in tal caso sono uguali).
Trattandosi di un particolare limite, quindi, valgono tutte le proprietaesposte nella sezione precedente; in particolare, anche il limite destro e quellosinistro, quando esistono, sono unici.
Inoltre, sempre dalle uguaglianze precedenti, segue che il punto x0 e diaccumulazione solo a destra (rispettivamente, solo a sinistra) l’esistenza dellimite della funzione in x0 equivale a quella del limite destro (rispettiva-mente, sinistro) in x0. In questo caso, quindi, il limite destro o sinistro nonaggiunge nulla di nuovo rispetto al limite.
Nel caso, invece, in cui il punto x0 sia di accumulazione sia a sinistrache a destra per X, si ha la seguente caratterizzazione.
Proposizione 6.3.2 Siano X un sottoinsieme non vuoto di R, x0 ∈ R unpunto di accumulazione sia a sinistra che a destra per X ed f : X → R unafunzione reale.
Allora, le seguenti proposizioni sono equivalenti:
a) Esiste il limite di f in x0.
b) Esistono entrambi i limiti sinistro e destro di f in x0 e sono uguali.
Inoltre, vera l’una e quindi l’altra delle proposizioni equivalenti precedenti,si ha:
limx→x0
f(x) = limx→x+
0
f(x) = limx→x−
0
f(x) .
Dimostrazione. a) ⇒ b) Ovvia in quanto ogni intorno di x0 e un intorno sia destro chesinistro di x0.b) ⇒ a) Si denoti con ℓ il valore comune dei due limiti sinistro e destro di f in x0 e siaI ∈ I(ℓ); dalla (6.3.2), considerando ℓ come limite destro, esiste δ1 > 0 tale che, per ognix ∈ X∩]x0, x0+δ1[, si abbia f(x) ∈ I; inoltre, considerando ℓ come limite sinistro, sempredalla (6.3.2), esiste δ2 > 0 tale che, per ogni x ∈ X∩]x0 − δ2, x0[, si abbia f(x) ∈ I.
Si e cosı trovato l’intorno J =]x0−δ2, x0+δ1[ di x0 tale che, per ogni x ∈ X∩J"x0,risulta f(x) ∈ I. Poiche l’intorno I di ℓ, si deduce che e vera la a). #
La proposizione precedente puo essere utilizzata, in qualche caso, ancheper dimostrare che un limite assegnato non esiste (facendo cioe vedere o chenon esiste uno dei limiti sinistro o destro, oppure che esistono entrambi masono diversi tra loro).
Nelle sezioni successive verranno esposti molti risultati limitandosi alcaso dei limiti; con opportune semplici modifiche, se necessarie, tali risultatisi possono adattare anche ai limiti sinistri e destri.

134 Capitolo 6: Limiti delle funzioni reali
6.4 Teoremi di confronto
I teoremi esposti nella presente sezione sono largamente utilizzati nel cal-colo dei limiti soprattutto per ricondurre quelli che coinvolgono funzioniabbastanza complesse a funzioni piu semplici.
Si considerano distintamente il caso di limiti reali e di limiti infiniti.Si intendono fissati in tutto il seguito un sottoinsieme non vuoto X di
R, un punto di accumulazione x0 ∈ R per X ed ℓ ∈ R.
Teorema 6.4.1 (Primo teorema di confronto)Se ℓ ∈ R e se f : X → R, g : X → R ed h : X → R sono funzioni realiverificanti le seguenti condizioni:
1. Esiste un intorno J0 di x0 tale che, per ogni x ∈ X ∩ J0 " x0,
g(x) ≤ f(x) ≤ h(x) ;
2. Esistono i limiti di g ed h in x0 e si ha
limx→x0
g(x) = ℓ , limx→x0
h(x) = ℓ .
Allora, esiste anche il limite di f in x0 e si ha
limx→x0
f(x) = ℓ .
Dimostrazione. Sia ε > 0; poiche limx→x0 g(x) = ℓ, esiste un intorno J1 di x0 tale che,per ogni x ∈ X ∩ J1 " x0,
ℓ− ε < g(x) < ℓ+ ε ,
e analogamente, poiche limx→x0 h(x) = ℓ, esiste un intorno J2 di x0 tale che, per ognix ∈ X ∩ J2 " x0
ℓ− ε < h(x) < ℓ+ ε .
Allora, l’insieme J = J0 ∩ J1 ∩ J2 risulta un intorno di x0 e per ogni x ∈ X ∩ J " x0,si ha
g(x) ≤ f(x) ≤ h(x) , ℓ− ε < g(x) < ℓ+ ε , ℓ− ε < h(x) < ℓ+ ε .
Da cio segueℓ− ε < g(x) ≤ f(x) ≤ h(x) < ℓ+ ε ,
e quindi, dall’arbitrarieta di ε > 0, e verificata la definizione di limite. #
Teorema 6.4.2 (Secondo teorema di confronto per i limiti)Se f : X → R e g : X → R sono funzioni reali verificanti le seguenticondizioni:
1. Esiste un intorno J0 di x0 tale che, per ogni x ∈ X ∩ J0 " x0,
g(x) ≤ f(x) (rispettivamente, f(x) ≤ g(x) );

6.5 Operazioni sui limiti 135
2. Esiste il limite di g in x0 e si ha limx→x0 g(x) = +∞ (rispettivamente,limx→x0 g(x) = −∞).
Allora, esiste anche il limite di f in x0 e si ha limx→x0 f(x) = +∞(rispettivamente, limx→x0 f(x) = −∞).
Dimostrazione. Sia M ∈ R; poiche limx→x0 g(x) = +∞, esiste un intorno J1 di x0 tale
che, per ogni x ∈ X ∩ J1 " x0, M < g(x). Allora, considerato l’intorno J = J0 ∩ J1
di x0, per ogni x ∈ X ∩ J " x0, si ha g(x) ≤ f(x) e M < g(x), da cui M < f(x).
Dall’arbitrarieta di M ∈ R segue la tesi. Il caso rispettivo si dimostra in maniera analoga.
#
6.5 Operazioni sui limiti
Si studia ora il comportamento del limite rispetto alle operazioni algebrichetra funzioni.
Si intendono fissati un sottoinsieme X non vuoto di R, un punto diaccumulazione x0 ∈ R per X, ℓ1 ∈ R, ℓ2 ∈ R e due funzioni reali f : X → Re g : X → R.
Teorema 6.5.1 (Primo teorema sul limite della somma)Se ℓ1, ℓ2 ∈ R e
limx→x0
f(x) = ℓ1 , limx→x0
g(x) = ℓ2 ,
allora, esiste anche il limite di f + g in x0 e si ha
limx→x0
(f(x) + g(x)) = ℓ1 + ℓ2 .
Dimostrazione. Sia ε > 0; dalle ipotesi, segue l’esistenza di un intorno J1 di x0 taleche, per ogni x ∈ X ∩ J1 " x0, ℓ1 − ε/2 < f(x) < ℓ1 + ε/2 e analogamente esisteun intorno J2 di x0 tale che, per ogni x ∈ X ∩ J2 " x0, ℓ2 − ε/2 < g(x) < ℓ2 + ε/2.Allora, considerato l’intorno J = J1 ∩ J2 di x0, per ogni x ∈ X ∩ J " x0, si hacontemporaneamente ℓ1 − ε/2 < f(x) < ℓ1 + ε/2 e ℓ2 − ε/2 < g(x) < ℓ2 + ε/2 e quindi
ℓ1 + ℓ2 − ε < f(x) + g(x) < ℓ1 + ℓ2 + ε
. Da cio, essendo ε > 0 arbitrario, segue la tesi. #
Il teorema precedente riguarda il caso in cui esistono entrambi i limitidelle funzioni f e g e sono numeri reali; esso si puo enunciare dicendo chein questo caso il limite della somma di due funzioni e uguale alla sommadei loro limiti. Bisogna tener presente, tuttavia, che tale regola non vale ingenerale. Nel caso in cui uno solo dei due limiti sia infinito, si ha quantosegue.

136 Capitolo 6: Limiti delle funzioni reali
Teorema 6.5.2 (Secondo teorema sul limite della somma)Sono verificate le seguenti condizioni:
1. limx→x0 f(x) = +∞ (rispettivamente, limx→x0 f(x) = −∞);
2. g e limitata inferiormente (rispettivamente, superiormente) in un in-torno di x0, cioe esistono M0 ∈ R ed un intorno J0 di x0 tali che, perogni x ∈ X ∩ J0, M0 ≤ g(x) (rispettivamente, g(x) ≤M0).
Allora, esiste anche il limite di f + g in x0 e si ha
limx→x0
(f(x) + g(x)) = +∞ (rispettivamente, limx→x0
(f(x) + g(x)) = −∞) .
Dimostrazione. Sia M ∈ R; dall’ipotesi 1. si ottiene l’esistenza di un intorno J1 di x0
tale che, per ogni x ∈ X ∩ J1 " x0, M − M0 < f(x). Alora, considerato l’intorno
= J0 ∩ J1 di x0, per ogni x ∈ X ∩ J " x0, si ha sia M0 ≤ g(x) che M −M0 < f(x) e
pertanto M = M −M0 +M0 < f(x)+ g(x). Dall’arbitrarieta di M ∈ R segue la tesi. La
dimostrazione del caso rispettivo e analoga. #
Conviene osservare che l’ipotesi 2. del Teorema 6.5.2 non prevede l’esi-stenza del limite di g in x0. Ovviamente, se esiste il limite di g in x0 ede un numero reale oppure +∞ (rispettivamente, e un numero reale oppure−∞), dalla Proposizione 6.2.2, 1. segue che la funzione g e limitata infe-riormente (rispettivamente, superiormente) in un intorno di x0. Quindi, inquesto caso, si ha ancora
limx→x0
(f(x) + g(x)) = +∞ (rispettivamente, limx→x0
(f(x) + g(x)) = +∞ ).
Nel caso in cui si abbia
limx→x0
f(x) = +∞ , limx→x0
g(x) = −∞ ,
(o viceversa), non si puo concludere nulla sul limite della somma. In talecircostanza, si dice che il limite limx→x0(f(x)+g(x)) si presenta nella formaindeterminata +∞−∞ (oppure −∞+∞).
Nel seguito si introdurranno gli strumenti opportuni che consentirannodi studiare anche tali tipi di limiti.
Si considera ora il caso del limite del prodotto di due funzioni. Ancheora conviene distinguere il caso in cui le due funzioni siano dotate di limitireali da quello in cui una delle due ammetta un limite infinito.
Teorema 6.5.3 (Primo teorema sul limite del prodotto)Se ℓ1, ℓ2 ∈ R e
limx→x0
f(x) = ℓ1 , limx→x0
g(x) = ℓ2 ,

6.5 Operazioni sui limiti 137
allora, esiste anche il limite di f · g in x0 e si ha
limx→x0
(f(x) · g(x)) = ℓ1 · ℓ2 .
Dimostrazione. Preliminarmente, si osserva che la funzione g, essendo dotata di limitereale, dalla Proposizione 6.2.2, 1., risulta limitata in un intorno di x0, e quindi esistonoM0 ∈ R ed un intorno J0 di x0 tali che, per ogni x ∈ X ∩ J0, |g(x)| ≤ M0. Sia ora ε > 0;poiche limx→x0 f(x) = ℓ1, esiste un intorno J1 di x0 tale che, per ogni x ∈ X∩J1"x0,|f(x)− ℓ1| < ε/(2(M + 1)), e analogamente, poiche limx→x0 g(x) = ℓ2, esiste un intornoJ2 di x0 tale che, per ogni x ∈ X ∩ J2 " x0, |g(x)− ℓ2| < ε/(2(|ℓ1|+ 1)).
Allora, considerato l’intorno J = J0 ∩ J1 ∩ J2 di x0, per ogni x ∈ X ∩ J " x0,
|f(x) · g(x)− ℓ1 · ℓ2| = |f(x) · g(x)− ℓ1 · g(x) + ℓ1 · g(x)− ℓ1 · ℓ2|= |(f(x)− ℓ1) · g(x) + ℓ1 · (g(x)− ℓ2)|≤ |(f(x)− ℓ1) · g(x)|+ |ℓ1 · (g(x)− ℓ2)|= |f(x)− ℓ1| · |g(x)|+ |ℓ1| · |g(x)− ℓ2|
<ε
2(M + 1)·M + |ℓ1| ·
ε
2(|ℓ1|+ 1)
<ε
2+ε
2= ε ,
e da cio, essendo ε > 0 arbitrario, segue la tesi. #
Quindi, anche nel caso del limite del prodotto di due funzioni, si puodire che esistono entrambi i limiti delle funzioni f e g e sono numeri reali,il limite del prodotto di due funzioni e uguale al prodotto dei loro limiti.Tale regola non si puo estendere in generale al caso in cui i limiti delle duefunzioni non siano entrambi reali.
Si ha tuttavia il seguente risultato.
Teorema 6.5.4 (Secondo teorema sul limite del prodotto)Se limx→x0 f(x) = +∞ e g e strettamente maggiore di un numero positivo(rispettivamente, strettamente minore di un numero negativo) in un intornodi x0 eccetto al piu il punto x0 (cioe, esistono r > 0 ed un intorno J0 di x0
tali che, per ogni x ∈ X∩J0"x0, g(x) ≥ r (rispettivamente, g(x) ≤ −r)),allora esiste anche il limite di f · g in x0 e si ha
limx→x0
f(x) · g(x) = +∞ (rispettivamente, limx→x0
f(x) · g(x) = −∞) ).
Dimostrazione. Sia M ∈ R e si supponga, come e lecito, M > 0 (rispettivamente,M < 0). Poiche limx→x0 f(x) = +∞, esiste un intorno J1 di x0 tale che, per ognix ∈ X ∩ J1 " x0, f(x) > M/r (rispettivamente, f(x) < −M/r). Allora, consideratol’intorno J = J0 ∩ J1 di x0, per ogni x ∈ X ∩ J " x0, si ha
f(x) · g(x) >m
rr (rispettivamente, f(x) · g(x) < −
M
r(−r) = M ).
Dall’arbitrarieta di M ∈ R segue la tesi. #
Si osservi che se limx→x0 f(x) = −∞ e g e strettamente maggiore diun numero positivo (rispettivamente, strettamente minore di un numero

138 Capitolo 6: Limiti delle funzioni reali
negativo) in un intorno di x0 eccetto al piu il punto x0, allora si puo ap-plicare il teorema precedente alle funzioni −f e −g, tenendo presente chef · g = (−f) · (−g). Conseguentemente si ha limx→x0 f(x) · g(x) = −∞(rispettivamente, limx→x0 f(x) · g(x) = +∞).
Nel caso in cui esista anche il limite della funzione g e sia uguale ad ℓ2 =0, essa verifica le ipotesi del teorema precedente a causa della Proposizione6.2.2, 2., e quindi
• Se ℓ1 = +∞ ed ℓ2 ∈]0,+∞[∪+∞ (rispettivamente, ℓ2 ∈]−∞, 0[∪−∞),esiste il limite di f · g in x0 ed e uguale a +∞ (rispettivamente, −∞).
• Se ℓ1 = −∞ ed ℓ2 ∈]0,+∞[∪+∞ (rispettivamente, ℓ2 ∈]−∞, 0[∪−∞),esiste il limite di f · g in x0 ed e uguale a −∞ (rispettivamente, +∞).
Se invece accade che uno dei limiti sia infinito e l’altro sia 0, i teoremisul prodotto non consentono di concludere nulla. In questo caso, si dice cheil limite si presenta nella forma indeterminata 0 · (+∞) oppure 0 · (−∞).
Si studia a questo punto il comportamento del limite della funzionereciproca.
Teorema 6.5.5 (Teorema sul limite della funzione reciproca)Sia ℓ ∈ R e si supponga che f : X → R sia una funzione reale tale chelimx→x0 f(x) = ℓ. Si supponga, inoltre, che per ogni x ∈ X, f(x) = 0 e si
consideri la funzione reciproca1
f: X → R (per ogni x ∈ X,
1
f(x) =
1
f(x)).
Allora:
1. Se ℓ ∈ R" 0, si ha limx→x0
1
f(x)=
1
ℓ.
2. Se ℓ = +∞ oppure ℓ = −∞, si ha limx→x0
1
f(x)= 0.
3. Se ℓ = 0, si ha limx→x0
∣∣∣∣1
f(x)
∣∣∣∣ = +∞ e inoltre
i) Se f e positiva in un intorno di x0 eccetto al piu il punto x0
(cioe, esiste un intorno J0 di x0 tale che, per ogni x ∈ X ∩ J0 " x0,f(x) > 0), allora lim
x→x0
1
f(x)= +∞.
ii) Se f e negativa in un intorno di x0 eccetto al piu il punto x0
(cioe, esiste un intorno J0 di x0 tale che, per ogni x ∈ X ∩ J0 " x0,f(x) < 0), allora lim
x→x0
1
f(x)= −∞.
iii) Se f non verifica le condizioni i) e ii) precedenti (cioe, in ogniintorno J di x0 esistono due punti x1, x2 ∈ X ∩ J " x0 tali che

6.5 Operazioni sui limiti 139
f(x1) < 0 < f(x2)), allora il limite della funzione reciproca in x0 nonesiste.
Dimostrazione. 1. Essendo ℓ = 0, dalla Proposizione 6.2.2, 2., esistono un numero realer > 0 ed un intorno J0 di x0 tali che, per ogni x ∈ X∩J0"x0, |f(x)| > r. Sia ora ε > 0e si consideri un intorno J1 di x0 tale che, per ogni x ∈ X∩J1"x0, |f(x)−ℓ| < r · |ℓ| ·ε.Allora, considerato l’intorno J = J0 ∩ J1 di x0, per ogni x ∈ X ∩ J " x0, si ha
∣∣∣∣1
f(x)−
1
ℓ
∣∣∣∣ =|f(x)− ℓ||f(x)| · |ℓ|
≤|f(x)− ℓ|
r · |ℓ|≤
r · |ℓ| · εr · |ℓ|
= ε
e cio, essendo ε > 0 arbitrario, completa la dimostrazione del primo caso.2. Sia ε > 0. Sia nel caso ℓ = +∞ oppure ℓ = −∞, si ha comunque limx→x0 |f(x)| = +∞e pertanto, posto M = 1/ε, esiste un intorno J di x0 tale che, per ogni x ∈ X ∩J " x0,|f(x)| > M . Osservato che M > 0, si ha, per ogni x ∈ X ∩ J " x0,
∣∣∣∣1
f(x)
∣∣∣∣ ≤1
M= ε
e da cio, essendo ε > 0 arbitrario, segue il caso 2.3. Si dimostra innanzitutto che limx→x0 |1/f(x)| = +∞. Infatti, sia M > 0 e si pongaε = 1/M ; poiche limx→x0 f(x) = 0, esiste un intorno J di x0 tale che, per ogni x ∈X ∩ J " x0, |f(x)| ≤ ε, da cui |1/f(x)| ≥ 1/ε = M . Dall’arbitrarieta di M > 0, seguela prima parte della tesi.
noindent i) Si supponga ora che esista un intorno J0 di x0 tale che, per ogni x ∈X ∩ J0 " x0, f(x) > 0. Allora, poiche f e |f | coincidono in X ∩ J0 " x0, da quantodimostrato preliminarmente e dal carattere locale del limite segue limx→x0 1/f(x) =limx→x0 |1/f(x)| = +∞.ii) Si dimostra in maniera analoga al caso precedente (tenendo presente che in questocaso f = −|f | in X ∩ J0 " x0.iii) Si supponga, per assurdo, che il limite della funzione reciproca esista e sia uguale adun numero ℓ1 ∈ R. Dalla Proposizione 6.2.2, 2., se fosse ℓ1 ∈]0,+∞[∪+∞, la funzionef verificherebbe l’ipotesi i), mentre se fosse ℓ1 ∈] − ∞, 0[∪−∞, la funzione f verifiche-rebbe l’ipotesi ii). Quindi dovra essere necessariamente ℓ1 = 0. Da quanto dimostratopreliminarmente, segue
limx→x0
|f(x)| = limx→x0
1
|1/f(x)|= +∞
e cio contraddice il fatto che limx→x0 f(x) = 0. #
Quando il limite della funzione e 0 e si vuole calcolare il limite dellafunzione reciproca, e dunque necessario studiare il segno della funzione f (oequivalentemente della reciproca di f) in un intorno del punto x0 per poterdecidere in quale sottocaso ci si trova.
Il Teorema 6.5.5 consente di concludere in ogni caso come si comportail limite della funzione reciproca; non vi sono quindi forme indeterminate atale proposito.
Si esamina ora il caso del quoziente di due funzioni.In questo caso, essendo f/g = f · (1/g), dallo studio del limite della
funzione reciproca e da quello del limite del prodotto di due funzioni, sideduce direttamente il comportamento del limite della funzione quoziente.

140 Capitolo 6: Limiti delle funzioni reali
Tuttavia, tali teoremi non consentono di determinare il comportamentodella funzione quoziente in tutti i possibili casi; infatti, se le funzioni f e gtendono entrambe a 0 oppure entrambe a ±∞, non si puo prevedere nulla.In tali casi si dice che il limite del quoziente si presenta in una delle seguentiforme indeterminate
0
0,
+∞+∞ ,
+∞−∞ ,
−∞+∞ ,
−∞−∞ , .
Tutti i risultati esposti valgono anche per i limiti sinistri (rispettiva-mente, destri) nel caso in cui x0 sia un punto di accumulazione a sinistra(rispettivamente, a destra), purche si sostituiscano gli intorni di x0 conintorni sinistri (rispettivamente, destri) tanto negli enunciati quanto nelledimostrazioni.
Si considera infine il caso delle funzioni composte.
Teorema 6.5.6 (Limite delle funzioni composte)Siano X e Y sottoinsiemi non vuoti di R ed f : X → R e g : Y → Rfunzioni reali tali che f(X) ⊂ Y . Sia x0 un punto di accumulazione per Xe si supponga che:
1. limx→x0 f(x) = y0, con y0 ∈ R punto di accumulazione per Y .
2. Esiste un intorno J0 di x0 tale che, per ogni x ∈ X ∩ J0 " x0,f(x) = y0.
3. limy→y0 g(y) = ℓ, con ℓ ∈ R.
Allora, la funzione composta g f : X → R e dotata di limite in x0 e siha
limx→x0
(g f)(x) = ℓ .
Dimostrazione. Sia I un intorno di ℓ. Dall’ipotesi 3. segue l’esistenza di un intorno I′ di
y0 tale che, per ogni y ∈ Y ∩I′"y0, g(y) ∈ I. Poiche I′ ∈ I(y0), dall’ipotesi 1. esiste unintorno J1 di x0 tale che, per ogni x ∈ X ∩J1"x0, f(x) ∈ I′. Si consideri ora l’intorno
J = J0 ∩ J1 di x0, dove J0 e l’intorno previsto nell’ipotesi 2. Per ogni x ∈ X ∩ J " x0,si ha f(x) ∈ Y (in quanto f(X) ⊂ Y ), f(x) ∈ I′ (in quanto x ∈ X ∩ J1 " x0) e,
infine, f(x) = y0 (in quanto x ∈ X ∩ J0 " x0). Quindi, risulta f(x) ∈ Y ∩ I′ " y0 e
conseguentemente (g f)(x) = g(f(x)) ∈ I. Dall’arbitrarieta dell’intorno I di ℓ, segue la
tesi. #
L’ipotesi 2. e automaticamente soddisfatta se y0 = ±∞, e non e neces-saria nel caso in cui y0 ∈ Y e limy→y0 g(y) = g(y0) (cioe, come si vedra inseguito, g e continua in y0).

6.6 Limiti delle funzioni monotone 141
Formalmente, applicare il teorema precedente significa effettuare la so-stituzione y = f(x) e tener conto del fatto che y → y0 quando x→ x0. Talemodo di esprimersi e molto frequente nelle applicazioni; tuttavia, bisognasempre verificare la condizione f(x) = y = y0 per x = x0 in un opportunointorno di x0.
6.6 Limiti delle funzioni monotone
Le funzioni monotone hanno proprieta molto interessanti riguardo l’esisten-za dei limiti sinistri e destri, evidenziate dal risultato seguente.
Teorema 6.6.1 (Teorema sul limite delle funzioni monotone)Siano X un sottoinsieme non vuoto di R, x0 ∈ R un punto di accumulazionea sinistra (rispettivamente, a destra) per X ed f : X → R una funzione realemonotona. Allora, esiste il limite sinistro (rispettivamente, destro) di f inx0 si ha:1
1. Se f e crescente:
limx→x−
0
f(x) = supx∈X, x<x0
f(x) , ( limx→x+
0
f(x) = infx∈X, x>x0
f(x) );
2. Se f e decrescente:
limx→x−
0
f(x) = infx∈X, x<x0
f(x) , ( limx→x+
0
f(x) = supx∈X, x>x0
f(x) ).
Dimostrazione. Si considera per brevita solamente il caso 1. in cui f e crescente (il caso2. puo essere dedotto dal caso 1. applicato alla funzione −f). Si ponga, per brevita,ℓ = supx∈X, x<x0
f(x) (rispettivamente, ℓ = infx∈X, x>x0 f(x). Si supponga dapprimache ℓ = +∞ (rispettivamente, ℓ = −∞). Dunque, in questo caso la funzione non elimitata superiormente in X∩]−∞, x0[. Per dimostrare che lim
x→x−0f(x) = +∞, si fissi
M ∈ R; da quanto osservato, M non puo essere un maggiorante di f(X∩] − ∞, x0[) equindi deve esistere x1 ∈ X, x1 < x0 tale che M < f(x1). Per ogni x ∈ X∩]x1, x0[, dallacrescenza di f , si ha M < f(x1) ≤ f(x). Cio, per l’arbitrarieta di M ∈ R, dimostra chelim
x→x−0f(x) = +∞.
Nel caso rispettivo la funzione f non e limitata inferiormente a destra di x0. Per-tanto, fissato M ∈ R, esso non puo essere un minorante di f(X∩]x0,+∞[) e quindi deveesistere x1 ∈ X, x0 < x1 tale che f(x1) < M . Allora, per ogni x ∈ X∩]x0, x1[, siha, dalla crescenza di f , f(x) ≤ f(x1) < M . Per l’arbitrarieta di M ∈ R, deve esserelim
x→x+0f(x) = −∞.
1Per convenzione, se Y ⊂ X si scrive supx∈Y
f(x) = +∞ per indicare che f|Y non e
limitata superiormente in Y e analogamente infx∈Y
f(x) = −∞ per indicare che f|Y non
e limitata inferiormente in Y . Nel teorema in esame si considera Y = X∩] − ∞, x0[(rispettivamente, Y = X∩]x0,+∞[).

142 Capitolo 6: Limiti delle funzioni reali
Si supponga ora ℓ ∈ R e si fissi ε > 0; dalla seconda proprieta dell’estremo superiore,esiste x1 ∈ X, x1 < x0 tale che ℓ − ε < f(x1). Per ogni x ∈ X∩]x1, x0[, si ha da unlato x1 < x per cui, dalla crescenza di f, ℓ − ε < f(x1) ≤ f(x) e dall’altro x < x0 percui, dalla prima proprieta dell’estremo superiore, f(x) ≤ ℓ < ℓ + ε. Quindi, per ognix ∈ X∩]x1, x0[, si ha ℓ − ε < f(x) < ℓ + ε e cio, per l’arbitrarieta di ε > 0, comportalim
x→x−0f(x) = ℓ.
Nel caso rispettivo si procede in modo analogo usando le proprieta dell’estremo
inferiore. #
In ogni caso, il teorema precedente garantisce l’esistenza del limite sini-stro e destro per una funzione monotona in tutti i punti reali di accumula-zione a sinistra e a destra.
Se, invece, il punto x0 e di accumulazione sia a sinistra che a destra, siha il seguente risultato.
Corollario 6.6.2 Siano X un sottoinsieme non vuoto di R, x0 ∈ R unpunto di accumulazione sia a sinistra che a destra per X ed f : X → R unafunzione reale monotona. Allora, esistono i limiti sinistro e destro di f inx0 e si ha
limx→x−
0
f(x) ∈ R , limx→x+
0
f(x) ∈ R . (6.6.1)
Inoltre, se f e crescente (rispettivamente, decrescente) si ha:
limx→x−
0
f(x) ≤ limx→x+
0
f(x) (rispettivamente, limx→x−
0
f(x) ≥ limx→x+
0
f(x) ),
(6.6.2)e in piu, se x0 ∈ X, si ha anche
limx→x−
0
f(x) ≤ f(x0) ≤ limx→x+
0
f(x) (6.6.3)
(rispettivamente, limx→x−
0
f(x) ≥ f(x0) ≥ limx→x+
0
f(x) ).
Dimostrazione. . Si supponga f crescente. Per ogni x1, x2 ∈ X tali che x1 < x0 < x2
(tali elementi esistono in quanto x0 e di accumulazione sia a sinistra che a destra), si ha
f(x1) ≤ f(x2); dall’arbitrarieta di x1 ∈ X, x1 < x0, risulta anche supx∈X, x<x0f(x) ≤
f(x2) (conseguentemente tale estremo superiore e reale) e da quest’ultima, essendo x2 ∈X, x0 < x2 arbitrario, segue supx∈X, x<x0
f(x) ≤ infx∈X, x>x0 f(x). Dal Teorema 6.6.1
segue la (6.6.2). Infine, se x0 ∈ X, si puo osservare che, per ogni x ∈ X, x < x0, si ha
f(x) ≤ f(x0) da cui la prima delle (6.6.3) e inoltre, per ogni x ∈ X, x0 < x, si ha
f(x0) ≤ f(x) da cui la seconda delle (6.6.3). #
Ovviamente, anche se e garantita sia l’esistenza del limite sinistro chedestro in un punto x0 di accumulazione sia a sinistra che a destra, non sipuo dire nulla per quanto riguarda l’esistenza del limite in x0; il limite esiste

6.7 Limiti delle funzioni elementari 143
se e solo se i limiti da destra e da sinistra coincidono e, in tal caso, dalla(6.6.3) segue anche
limx→x0
f(x) = f(x0) . (6.6.4)
Quindi una funzione monotona definita in un punto x0 di accumulazionesia a sinistra che a destra, non puo avere in x0 un limite diverso dal valoref(x0). Se il punto x0 non e di accumulazione sia a sinistra che a destra,questo non vale piu; ad esempio, basta considerare la funzione crescente
f(x) =
x− 1 , x ∈ [−1, 0[ ;
0 , x = 0 ,
nel punto x0 = 0.
Nel caso in cui x0 = ±∞, si ha il seguente risultato analogo al Teorema6.6.1; la dimostrazione e del tutto analoga a quella del Teorema 6.6.1 e vieneomessa per brevita.
Teorema 6.6.3 Siano X un sottoinsieme di R non limitato superiormente(rispettivamente, inferiormente) ed f : X → R una funzione reale mono-tona. Allora esiste il limite di f in +∞ (rispettivamente, in −∞) e siha:
1. Se f e crescente:
limx→+∞
f(x) = supx∈X
f(x) (rispettivamente, limx→−∞
f(x) = infx∈X
f(x) ).
2. Se f e decrescente:
limx→+∞
f(x) = infx∈X
f(x) (rispettivamente, limx→−∞
f(x) = supx∈X
f(x) ).
In Figura 6.1 e rappresentata una funzione decrescente definita in tuttoR che ha limite +∞ in −∞ ed un limite reale ℓ in +∞.
6.7 Limiti delle funzioni elementari
Visto il carattere locale del limite, il Teorema 6.6.1 studiato nella sezioneprecedente puo essere applicato piu in generale a funzioni monotone in unintorno sinistro o destro del punto x0 nel caso in cui x0 sia reale oppure inun intorno di +∞ o −∞ nel caso in cui x0 = +∞ o x0 = −∞.
In tal modo e possibile calcolare i limiti delle funzioni elementari nei pun-ti di accumulazione per l’insieme di definizione. Si elencano ora brevementetali limiti.

144 Capitolo 6: Limiti delle funzioni reali
x
y
l
Figura 6.1: Limiti di una funzione monotona.
6.7.1 Funzioni potenza ad esponente intero positivo
Si consideri la funzione potenza fn : R→ R. Allora
• Se x0 ∈ R, si ha limx→x0
xn = xn0 .
• Se x0 = +∞, si ha limx→+∞
xn = +∞.
• Se x0 = −∞, si ha limx→−∞
= +∞ se n e pari e limx→−∞
xn = −∞ se n e
dispari.
Basta infatti applicare quanto osservato preliminarmente osservando chen e dispari la funzione potenza e strettamente crescente, mentre n e parie strettamente crescente in [0,+∞[ e strettamente decrescente in ]−∞, 0].In tutti i punti reali, si possono cosı ricavare i limiti sinistri e destri; poichequesti coincidono, si ottiene il limite della funzione.
Lo stesso tipo di ragionamento si applica anche nei casi che seguono.
6.7.2 Funzioni radice
Si consideri la funzione radice f1/n. Allora:

6.7 Limiti delle funzioni elementari 145
• Se x0 ∈ R+, si ha limx→x0
x1/n = x1/n0 . Se n e dispari, la stessa
uguaglianza vale per ogni x ∈ R.
• Se x0 = +∞, si ha limx→+∞
x1/n = +∞. Se n e dispari, si ha anche
limx→−∞
x1/n = −∞.
6.7.3 Funzioni potenza ad esponente intero negativo
Si consideri la funzione potenza ad esponente intero negativo f−n : R "0→ R. Allora
• Se x0 ∈ R" 0, si ha limx→x0
1/xn = 1/xn0
• Se x0 = 0 ed n e pari, si ha limx→0
1/xn = +∞. Se n e dispari, si ha
limx→0+
1/xn = +∞ e limx→0−
1/xn = −∞; conseguentemente, il limite
limx→0
1/xn non esiste
• Se x0 = +∞ oppure x0 = −∞, si ha limx→±∞
1/xn = 0.
6.7.4 Funzioni potenza ad esponente reale
Si consideri la funzione potenza ad esponente reale fr :]0,+∞[→ R conr ∈ R. Allora
• Se x0 > 0, si ha limx→x0
xr = xr0.
• Se x0 = 0 ed r > 0, si ha limx→0
xr = 0 (= xr0). Se r < 0, si ha
limx→0
xr = +∞.
• Se x0 = +∞ ed r > 0, si ha limx→+∞
xr = +∞. Se r < 0, si ha invece
limx→+∞
xr = 0.
6.7.5 Funzioni esponenziali
Sia a > 0, a = 1 e si consideri la funzione esponenziale expa : R→ R. Allora
• Se x0 ∈ R, si ha limx→x0
ax = ax0 .
• Se x0 = +∞ ed a > 1, si ha limx→+∞
ax = +∞. Se 0 < a < 1, si ha
invece limx→+∞
ax = 0.
146 Capitolo 6: Limiti delle funzioni reali
• Se x0 = −∞ ed a > 1, si ha limx→−∞
ax = 0. Se 0 < a < 1, si ha
limx→−∞
ax = +∞.
6.7.6 Funzioni logaritmo
Sia a > 0, a = 1 e si consideri la funzione logaritmo loga :]0,+∞[→ R.Allora
• Se x0 > 0, si ha limx→x0
loga x = loga x0.
• Se x0 = 0 ed a > 1, si ha limx→0
loga x = −∞. Se 0 < a < 1, si ha invece
limx→0
loga x = +∞.
• Se x0 = +∞ ed a > 1, si ha limx→+∞
loga x = +∞. Se 0 < a < 1, si ha
limx→+∞
loga x = −∞.
6.7.7 Funzioni trigonometriche
Per quanto riguarda le funzioni seno, coseno, tangente e cotangente, la pro-prieta di monotonia non e verificata in un intorno di alcuni punti ed ilcorrispondente limite non esiste. Per il momento ci si limita a segnalare ta-le eventualita, in quanto la relativa dimostrazione sara molto piu semplicecome applicazione della caratterizzazione sequenziale del limite (Teorema7.1.3).
• Se x0 ∈ R, si ha limx→x0
sinx = sinx0. Se x0 = +∞ oppure x0 = −∞, il
limite limx→±∞
sinx non esiste.
• Se x0 ∈ R, si ha limx→x0
cosx = cosx0. Se x0 = +∞ oppure x0 = −∞,
il limite limx→±∞
cosx non esiste.
• Se x0 ∈ R, x0 = π/2 + kπ, k ∈ Z, si ha limx→x0
tan = tanx0. Se x0 =
π/2+kπ con k ∈ Z, il limite non esiste e si ha limx→π/2+kπ−
tanx = +∞
e limx→π/2+kπ+
tanx = −∞. Infine, se x0 = +∞ oppure x0 = −∞, il
limite della tangente in x0 non esiste.
• Se x0 ∈ R, x0 = kπ, k ∈ Z, si ha limx→x0
cotx = cotx0. Se x0 = kπ con
k ∈ Z, il limite non esiste e si ha limx→kπ−
cotx = −∞ e limx→kπ+
cotx =
+∞. Infine, se x0 = +∞ oppure x0 = −∞, il limite della cotangentein x0 non esiste.

6.8 Limiti di polinomi e funzioni razionali 147
6.7.8 Funzioni trigonometriche inverse
Infine, si considerano le funzioni arcoseno, arcocoseno, arcotangente e arco-cotangente. Allora
• Se x0 ∈ [−1, 1], si ha limx→x0
arcsinx = arcsinx0.
• Se x0 ∈ [−1, 1], si ha limx→x0
arccosx = arccosx0.
• Se x0 ∈ R, si ha limx→x0
arctanx = arctanx0. Se x0 = +∞, allora
limx→+∞
arctanx = π/2 e infine, se x0 = −∞, si ha limx→−∞
arctanx =
−π/2.
• Se x0 ∈ R, si ha limx→x0
arccotx = arccotx0. Se x0 = +∞, allora
limx→+∞
arccotx = 0 e infine, se x0 = −∞, si ha limx→−∞
arccotx = π.
6.8 Limiti di polinomi e funzioni razionali
Le operazioni sui limiti applicate alle funzioni elementari consentono il cal-colo dei limiti nella maggior parte dei casi in cui non si presentano formeindeterminate.
Conoscendo i limiti delle funzioni potenza ad esponente intero positivo,e immediato calcolare il limite di un polinomio. Tale limite ha senso perogni x0 ∈ R in quanto i polinomi sono definiti in tutto R.
Sia P (x) = a0 + · · ·+ anxn con a0, . . . , an ∈ R, an = 0, un polinomio digrado n. Allora
1. Se x0 ∈ R, si ha limx→x0
P (x) = P (x0).
2. Se x0 = ±∞, si ha
limx→+∞
P (x) = limx→+∞
anxn =
+∞ , se an > 0 ;
−∞ , se an < 0 ;
limx→−∞
P (x) = limx→−∞
anxn =
+∞ , se (−1)nan > 0 ;
−∞ , se an < 0 ;
(si osservi che (−1)nan > 0 se n e pari e an > 0 oppure se n edispari e an < 0). L’ultima uguaglianza si ottiene facilmente mettendoin evidenza il termine anxn (si ottiene il limite del prodotto di duefunzioni di cui una e un infinito e l’altra tende ad 1).

148 Capitolo 6: Limiti delle funzioni reali
Un altro caso abbastanza semplice e di notevole interesse e quello dellefunzioni razionali.
Siano P : R→ R un polinomio di grado n e Q : R→ R un polinomio digrado m aventi la forma
P (x) = a0 + · · ·+ anxn , Q(x) = b0 + · · ·+ bmxm ,
con an = 0 e bm = 0.Posto X = x ∈ R | Q(x) = 0, si considera la funzione razionale
R : X → R definita ponendo, per ogni x ∈ X,
R(x) =P (x)
Q(x)
Poiche X differisce da R al piu per un numero finito di punti, tutti glielementi di R sono di accumulazione per X.
Ha senso quindi considerare il limite
limx→x0
P (x)
Q(x)
per ogni x0 ∈ R ed anche per x0 = ±∞.Di seguito, si considerano i diversi casi che si possono presentare, che
si ottengono tutti applicando i teoremi sul limite della funzione reciproca(Teorema 6.5.5) e sul prodotto (Teoremi 6.5.3–6.5.4) di due funzioni.
1. Caso x0 ∈ X. In questo caso si ha x0 ∈ R, Q(x0) = 0 e conseguente-mente
limx→x0
P (x)
Q(x)=
P (x0)
Q(x0).
2. Caso x0 ∈ R, Q(x0) = 0. Si suppone, inoltre, che P (x0) = 0 in quanto,se fosse anche P (x0) = 0, il rapporto P (x)/Q(x) si potrebbe scriverenella forma
P (x)
Q(x)=
(x− x0) · P1(x)
(x− x0) ·Q1(x)=
P1(x)
Q1(x),
con P1 e Q1 polinomi opportuni di grado n−1 e rispettivamente m−1ed il limite si ricondurrebbe a quello del rapporto tra i polinomi P1 eQ1; tale procedimento si potrebbe reiterare fino a trovare almeno unodei due polinomi diverso da 0 in x0.
Premesso cio, nel caso Q(x0) = 0 e P (x0) = 0, la funzione reciprocatende a 0 e quindi, per il Teorema 6.5.5, e necessario studiare il segnodel rapporto P (x)/Q(x) in un intorno del punto x0. Poiche una funzio-ne razionale cambia segno al piu un numero finito di volte (in quanto

6.9 Limiti notevoli 149
cosı si comportano i polinomi al numeratore ed al denominatore), sihanno i seguenti casi possibili:
i) Se in un intorno del punto x0, il rapporto P (x)/Q(x) e positivo,si ha
limxtox0
P (x)
Q(x)= +∞ .
ii) Se in un intorno del punto x0, il rapporto P (x)/Q(x) e nega-tivo, si ha
limxtox0
P (x)
Q(x)= −∞ .
iii) Se il rapporto P (x)/Q(x) cambia segno nel punto x0, il limite
limxtox0
P (x)Q(x) non esiste.
In questo caso, tuttavia, il rapporto P (x)/Q(x) e necessariamentepositivo in un intorno sinistro di x0 e negativo in un intorno destro dix0 oppure viceversa (in quanto una funzione razionale puo cambiaresegno un numero finito di volte) e quindi si ha
limxtox
−0
P (x)
Q(x)= +∞ , lim
xtox+0
P (x)
Q(x)= −∞
oppure
limxtox
−0
P (x)
Q(x)= −∞ , lim
xtox+0
P (x)
Q(x)= +∞ .
3. Caso x0 = +∞ oppure x0 = −∞. Mettendo in evidenza al numera-tore ed al denominatore del rapporto P (x)/Q(x) il termine di gradomassimo (anxn e bmxm, rispettivamente), si ottiene facilmente
limxto±∞
P (x)
Q(x)= lim
xto±∞
anxn
bmxm
e da quest’ultima uguaglianza e immediato ottenere il risultato dellimite (si evita per brevita di scrivere tutti i possibili sottocasi).
6.9 Limiti notevoli
I teoremi sui limiti esaminati fino ad ora non sono applicabili nel casoin cui si presenti una forma indeterminata; le forme indeterminate che sipresentano solitamente possono essere riassunte come segue:
• Forme indeterminate della somma di due funzioni: +∞−∞, −∞+∞;

150 Capitolo 6: Limiti delle funzioni reali
• Forme indeterminate del prodotto di due funzioni: 0 · (±∞), ±∞ · 0;
• Forme indeterminate del quoziente di due funzioni:0
0,±∞±∞ ;
• Forme indeterminate delle potenze di due funzioni: 2 00, +∞0, 1±∞.
I tentativi che si possono effettuare per risolvere un limite che si presentain una delle forme indeterminate elencate sopra sono di vario genere; tra imetodi piu semplici vi sono l’utilizzo dei limiti notevoli, oppure della teoriadegli infinitesimi e degli infiniti, della regola di L’Hopital e della formula diTaylor.
Nella presente sezione ci si occupa dei limiti notevoli, mentre nellaprossima della teoria degli infinitesimi e degli infiniti.
L’utilizzo della regola di l’Hopital e della formula di Taylor richiedeinvece la conoscenza del calcolo differenziale.
Si elencano ora i limiti notevoli piu comunemente utilizzati.
1. limx→0
sinx
x= 1.
Infatti, sia 0 < x < π/2. Da semplici considerazioni geometriche, si ha: sinx ≤x ≤ tanx (infatti, il triangolo OAP di area sinx/2 e contenuto nel settore circolareOAP di area πx/(2π) = x/2 il quale a sua volta e contenuto nel triangolo OAQdi area tanx/2 e confrontare le rispettive aree; vedasi la Figura 6.2).
Considerando i reciproci delle diseguaglianze precedenti e moltiplicando tutti i
membri per sinx, si ha cosx ≤sinx
x≤ 1. Poiche le funzioni a primo, secondo e
terzo membro sono tutte pari, la stessa diseguaglianza vale se −π/2 < x < 0. Dal
primo teorema di confronto (Teorema 6.4.1), tenendo presente che limx→0 cosx =
1 (vedasi la Sezione 6.7.7, si deduce allora la tesi.
2. limx→0
tanx
x= 1.
Infatti, tenendo presente il limite 1. precedente,
limx→0
tanx
x= lim
x→0
sinx
x·
1
cosx= 1
.
2Tali forme indeterminate derivano dai limiti del tipo limx→x0 f(x)g(x) (con f stret-tamente positiva) che si possono scrivere al modo seguente: limx→x0 exp(g(x) log f(x)).Pertanto, tali limiti vengono ricondotti al limite del prodotto limx→x0 g(x) log f(x) peril quale si possono presentare le forme indeterminate del prodotto viste sopra; tenendopresente che log f(x) tende a +∞ in +∞, a −∞ in 0 ed a 0 in 1, le forme indeterminatedel prodotto si presentano nei seguenti casi: 1) f tende a 0 e g tende a 0; 2) f tende a+∞ e g tende a 0; 3) f tende a 1 e g tende a ±∞.

6.9 Limiti notevoli 151
O 1
B
x
A
P
Q
tan x
sin x
.
..........................
..........................
..........................
...........................
..........................
..........................
.........................
........................
.................................................
....................................................
............................................................................................................................................................................................................................................
...................................................
........................
........................
.........................
..........................
..........................
...........................
..........................
..........................
..............
............ .......................
......................
......................
......................
......................
.....................
Figura 6.2: Limite notevole sinx/x in 0.
3. limx→0
1− cosx
x2=
1
2.
Infatti, tenendo presente il limite 1. precedente,
limx→0
1− cosx
x2= lim
x→0
(1− cosx)(1 + cosx)
x2 (1 + cosx)=
1
2limx→0
1− cos2 x
x2
=1
2limx→0
(sinx
x
)2
=1
2
.
4. limx→0
arcsinx
x= 1.
Infatti, posto y = arcsinx (da cui x = sin y) e osservato che y → 0 per x → 0 e
inoltre che arcsinx = 0 per ogni x ∈ [−1, 1] " 0, si puo applicare il teorema sul
limite delle funzioni composte (Teorema 6.5.6) dal quale si ricava limx→0
arcsinx
x=
limy→0
y
sin y= 1.
5. limx→0
arctanx
x= 1.
Si procede come nel caso precedente ponendo y = arctanx;dal teorema sul limite
delle funzioni composte (Teorema 6.5.6) si ottiene limx→0
arctanx
x= lim
y→0
y
tan y= 1.
Come si puo facilmente constatare, i limiti notevoli 2.–5. si ottengonotutti dal limite notevole 1. applicando i teoremi sulle varie operazioni sui li-miti. Si studia ora un altro limite notevole dal quale sara possibile derivarnediversi altri.

152 Capitolo 6: Limiti delle funzioni reali
Innanzitutto, e necessaria una breve premessa riguardante i limiti disuccessioni che saranno approfonditi nel capitolo seguente.
Sia (an)n∈N una successione di numeri reali. Essa puo essere riguardatacome una funzione reale definita in N; poiche non vi sono punti di accumu-lazione reali per N ed N non e limitato superiormente, l’unico punto in cuiha senso considerare il limite di una successione e +∞. In conformita conle notazioni assunte per le successioni, tale limite, se esiste, viene denotatocon il simbolo
limn→+∞
an .
Ovviamente, tutti i teoremi visti sui limiti di funzioni valgono anche per ilimiti di successioni. In particolare, dal teorema sul limite delle funzioni mo-notone, si ottiene che ogni successione (an)n∈N crescente (rispettivamente,decrescente) e dotata di limite e si ha
limn→+∞
an = supn∈N
an (rispettivamente, limn→+∞
an = infn∈N
an ).
In particolare, si e visto che la successione ((1 + 1/n)n)n≥1, utilizzata perdefinire il numero di Nepero, e strettamente crescente (Proposizione 4.5.2)e pertanto, da quanto osservato, si ottiene il seguente limite notevole.
6. limn→+∞
(1 +
1
n
)n
= e .
Come per il limite notevole 1., anche ora se ne possono ottenere altriderivati.
7. limx→+∞
(1 +
1
x
)x
= e .
La differenza rispetto al limite precedente consiste nel fatto che ora la funzione dicui si considera il limite x 4→ (x + 1/x)x e definita in ] − ∞,−1[∪]0,+∞[ e nonsolo sui numeri naturali.
Per ogni x ≥ 1, tenendo presente che [x] ≤ x < [x] + 1 ([x] denota la parte interadi x), si ha (
1 +1
[x] + 1
)[x]
≤(1 +
1
x
)x
≤(1 +
1
[x]
)[x]+1
e inoltre, dal limite precedente,
limx→+∞
(1 +
1
[x] + 1
)[x]
= limn→+∞
(1 +
1
n+ 1
)n
= limn→+∞
(1 +
1
n+ 1
)n+1
·1
1 +1
n+ 1
= e ,
limx→+∞
(1 +
1
[x]
)[x]+1
= limn→+∞
(1 +
1
n
)n+1
= limn→+∞
(1 +
1
n
)n (1 +
1
n
)= e .
Allora, dal primo teorema di confronto per i limiti (Teorema 6.4.1 si ottiene la
tesi.

6.9 Limiti notevoli 153
8. limx→−∞
(1 +
1
x
)x
= e .
Si osserva innanzitutto che ha senso considerare tale limite in quanto per x < −1,la base 1 + 1/x e strettamente positiva. Si ha poi, per ogni x < −1,
(1 +
1
x
)x
=
(1−
1
|x|
)−|x|=
(|x|
|x|− 1
)|x|=
(|x|− 1 + 1
|x|− 1
)|x|
=
(1 +
1
|x|− 1
)|x|=
(1 +
1
|x|− 1
)|x|−1 (1 +
1
|x|− 1
).
e quindi, posto y = |x| − 1 e osservato che y → +∞ per x → −∞, dal limitenotevole precedente si ottiene
limx→−∞
(1 +
1
x
)x
= limy→+∞
(1 +
1
y
)y (1 +
1
y
)= e .
9. Per ogni a = 0: limx→+∞
(1 +
a
x
)x= ea, lim
x→−∞
(1 +
a
x
)x= ea.
Infatti, se a > 0,
limx→±∞
(1 +
a
x
)x= lim
x→±∞
((1 +
1
x/a
)x/a)a
limy→±∞
((1 +
1
y
)y)a
= ea ,
dove si e posto y = x/a.
Se a < 0, si procede come sopra tenendo presente che la sostituzione y = x/a
comporta y → ∓∞.
10. Per ogni c = 0: limx→0
(1 + cx)1/x = ec.
Infatti, considerando separatamente i limiti da sinistra e da destra e ponendoy = 1/x, si ha
limx→0+
(1 + cx)1/x = limy→+∞
(1 +
c
y
)y
= ec ,
limx→0−
(1 + cx)1/x = limy→−∞
(1 +
c
y
)y
= ec ,
11. Per ogni c = 0 e per ogni a > 0, a = 1: limx→0
loga(1 + cx)
x=
c
log a. In
particolare: limx→0
log(1 + cx)
x= c.
Infatti, dal limite notevole precedente,
limx→0
loga(1 + cx)
x= lim
x→0loga(1 + cx)1/x = loga ec = c · loga e =
c
log a.

154 Capitolo 6: Limiti delle funzioni reali
12. Per ogni a > 0, a = 1: limx→0
ax − 1
x= log a. In particolare: lim
x→0
ex − 1
x=
1.
Ponendo y = ax − 1, si ha x = loga(1 + y) e quindi dal limite notevole precedentee dal teorema sul limite della funzione reciproca (Teorema 6.5.5), si ha
limx→0
ax − 1
x= lim
y→0
y
loga 1 + y= log a .
13. Per ogni a = 0: limx→0
(1 + x)a − 1
x= a.
Si ha, infatti,
limx→0
(1 + x)a − 1
x= lim
x→0
(1 + x)a − 1
log(1 + x)
log(1 + x)
x= lim
x→0
(1 + x)a − 1
log(1 + x).
A questo punto, posto y = (1+x)a−1, si ricava 1+y = (1+x)a da cui log(1+y) =a·log(1+x); allora, dal teorema sul limite della funzione reciproca (Teorema 6.5.5),segue
limx→0
(1 + x)a − 1
log(1 + x)= lim
y→0
a y
log(1 + y)= a
e da cio la tesi.
6.10 Infinitesimi ed infiniti
La teoria che si vuole esporre nella presente sezione risulta utile per risolveregran parte dei limiti in cui compare una forma indeterminata ed in cui nonpossono essere utilizzati direttamente i teoremi sui limiti studiati fino adora.
Si considera fissato in tutto il seguito un sottoinsieme non vuoto X diR ed un punto x0 ∈ R di accumulazione per X.
Inoltre, tutte le funzioni reali f : X → R prese in considerazioneverificano la condizione seguente
∃ J0 ∈ I(x0) t.c. ∀ x ∈ X ∩ J0 " x0 : f(x) = 0 . (6.10.1)
Sia allora f : X → R una funzione reale, si dice che f e un infinitesimo(rispettivamente, un infinito) in x0 se
limx→x0
f(x) = 0 (rispettivamente, limx→x0
|f(x)| = +∞ ). (6.10.2)
Pertanto, una funzione f e un infinitesimo (rispettivamente, un infinito)in x0 se e solo se la funzione reciproca 1/f e un infinito (rispettivamente,un infinitesimo) in x0 (ha senso considerare la funzione reciproca almeno inun intorno del punto x0 a causa dell’ipotesi (6.10.1)).

6.10 Infinitesimi ed infiniti 155
La definizione successiva e alla base delle considerazioni svolte nella pre-sente sezione. Per comodita vengono considerate funzioni definite in unostesso insieme X, anche se per il carattere locale del limite, si potrebbesupporre che le funzioni in esame siano definite in insiemi aventi la stessaintersezione con un intorno di x0 (privato al piu del punto x0).
Definizione 6.10.1 Siano f : X → R e g : X → R due infinitesimi(rispettivamente, infiniti) in x0. Si dice che:
1. f e un infinitesimo (rispettivamente, un infinito) in x0 di ordinemaggiore di g se
limx→x0
|f(x)||g(x)| = 0 rispettivamente, = +∞ ). (6.10.3)
In tal caso si scrive
ordx→x0
f(x) > ordx→x0
g(x) .
2. f e un infinitesimo (rispettivamente, un infinito) in x0 di ordineminore di g se
limx→x0
|f(x)||g(x)| = +∞ rispettivamente, = 0 ). (6.10.4)
In tal caso si scrive
ordx→x0
f(x) < ordx→x0
g(x) .
3. f e un infinitesimo (rispettivamente, un infinito) in x0 dello stesso or-dine di g (oppure che f e g sono infinitesimi (rispettivamente, infiniti)dello stesso ordine in x0) se
limx→x0
|f(x)||g(x)| = ℓ > 0 . (6.10.5)
Se, in piu, e verificata la condizione
limx→x0
f(x)
g(x)= 1 , (6.10.6)
allora f e g si dicono equivalenti in x0. Per denotare la circostanzain cui f e g siano infinitesimi (rispettivamente, infiniti) dello stessoordine in x0 si usa la scrittura
ordx→x0
f(x) = ordx→x0
g(x) ,

156 Capitolo 6: Limiti delle funzioni reali
mentre per indicare il fatto che f e g sono infinitesimi (rispettivamen-te, infiniti) equivalenti in x0 si scrive
f(x) ∼ g(x) , x→ x0 oppure f(x) equivx→x0
g(x) .
4. f e g non sono confrontabili in x0 se non verificano nessuna dellecondizioni precedenti.
Osservazione 6.10.2 Se si suppone che f e g siano due infinitesimi (ri-spettivamente, infiniti) in x0 aventi lo stesso ordine e se esiste il limite
limx→x0
f(x)
g(x)= ℓ ∈ R" 0 , (6.10.7)
allora la funzione f(x) e equivalente in x0 alla funzione ℓ · g(x)Bisogna osservare, tuttavia, che la condizione (6.10.5) non comporta, in
generale, l’esistenza del limite (6.10.7). Ad esempio, la funzione (−1)[1/x]/xe un infinito in 0 dello stesso ordine di 1/x, ma le due funzioni non sonoequivalenti in 0 (infatti, il limite del rapporto delle due funzioni non esistementre in valore assoluto tende ad 1).
Le definizioni assunte fino ad ora consentono di confrontare tra loro gliinfinitesimi e gli infiniti in un punto; il passo successivo e ora quello diattribuire un valore numerico ad alcuni infinitesimi ed infiniti che sarannopresi come campione, in modo da poter confrontare ogni altro infinitesimoo infinito con tali valori numerici. Le funzioni piu semplici che convieneconsiderare come infinitesimi ed infiniti campione sono precisate di seguito.
Definizione 6.10.3 Sia α > 0. Si definisce infinitesimo (rispettivamente,infinito) campione in x0 di ordine α, la funzione
|x− x0|α , (rispettivamente,1
|x− x0|α), se x0 ∈ R ,
1
|x|α , (rispettivamente, |x|α ), se x0 = ±∞ .
Inoltre, se f : X → R e un infinitesimo (rispettivamente, un infinito)in x0, si dice che f ha ordine maggiore di α (oppure minore, di α oppureuguale ad α) e si scrive
ordx→x0
f(x) > α (oppure ordx→x0
f(x) < α , ordx→x0
f(x) = α )
se f ha ordine maggiore dell’infinitesimo (rispettivamente, dell’infinito)campione in x0 di ordine α.
Infine, si dice che f e un infinitesimo (rispettivamente, un infinito) inx0 di ordine arbitrariamente piccolo (oppure arbitrariamente grande) se fha ordine minore (oppure maggiore) di α per ogni α > 0.

6.10 Infinitesimi ed infiniti 157
L’ordine di infinitesimo o di infinito non deve essere considerato comeun numero reale; in molti casi si puo solo dire che esso e maggiore o minoredi un numero α > 0, ma non esiste alcun numero α > 0 per cui l’ordine siauguale ad α. Gli esempi piu importanti da questo punto di vista sono lafunzione logaritmo nei punti 0 e +∞ e la funzione esponenziale nei punti±∞. Si puo dimostrare, infatti, il seguente importante risultato.
Proposizione 6.10.4 Sia a > 0, a = 1. Allora:
1. La funzione logaritmo loga e un infinito in 0 (da destra) di ordinearbitrariamente piccolo.
2. La funzione logaritmo loga e un infinito in +∞ di ordine arbitraria-mente piccolo.
3. Se a > 1 (rispettivamente, se 0 < α < 1), la funzione esponenzialeexpa e un infinito (rispettivamente, un infinitesimo) in +∞ di ordinearbitrariamente grande.
4. Se a > 1 (rispettivamente, se 0 < α < 1), la funzione esponenzialeexpa e un infinitesimo (rispettivamente, un infinito) in −∞ di ordinearbitrariamente grande.
Si e preferito enunciare la proposizione precedente per la sua importan-za nelle applicazioni. La sua dimostrazione, tuttavia, non viene trattataa questo punto in quanto sara un immediata conseguenza della regola diL’Hopital.
6.10.1 Operazioni con infinitesimi ed infiniti
Lo studio delle operazioni sugli infinitesimi ed infiniti e importante nellostudio di un limite a causa della seguente regola di sostituzione.
Proposizione 6.10.5 (Regola di sostituzione)Siano f1, f2, g1 e g2 infinitesimi (rispettivamente, infiniti) in x0 e si sup-ponga che
f1(x) equivx→x0
f2(x) , g1(x) equivx→x0
g2(x) .
Allora, il limite limx→x0
f1(x)
g1(x)esiste se e solo se esiste il limite lim
x→x0
f2(x)
g2(x)e,
in tal caso, i due limiti coincidono.
Dimostrazione. Ovvia, in quanto dalle ipotesi assunte, segue
limx→x0
f1(x)
g1(x)= lim
x→x0
f1(x)
f2(x)
f2(x)
g2(x)
g2(x)
g1(x)= lim
x→x0
f2(x)
g2(x).

158 Capitolo 6: Limiti delle funzioni reali
#
Si passa ora ad esaminare il comportamento della somma di due infini-tesimi o infiniti.
Teorema 6.10.6 (Somma di due infinitesimi o infiniti)Siano f e g due infinitesimi (rispettivamente, infiniti) in x0. Allora:
1. Se ordx→x0
f(x) < ordx→x0
g(x), allora la somma f + g e un infinitesimo
(rispettivamente, un infinito) in x0 e si ha
f(x) + g(x) equivx→x0
f(x) (rispettivamente, f(x) + g(x) equivx→x0
g(x) ).
2. Se ordx→x0
f(x) = ordx→x0
g(x), e se limx→x0
f(x)
g(x)= ℓ con ℓ ∈ R " 0 e
ℓ = −1, allora la somma f + g e un infinitesimo (rispettivamente, uninfinito) in x0 e si ha
f(x) + g(x) equivx→x0
(ℓ+ 1)g(x) .
3. Se limx→x0
f(x)
g(x)= −1, allora la somma f + g e un infinitesimo in x0
di ordine maggiore di quello degli infinitesimi f e g (rispettivamente,non e detto che f+g sia un infinito in x0; nel caso cio accada, l’ordinedi f + g e minore di quello degli infiniti f e g).
Dimostrazione. 1. Supposto ord x→x0 f(x) < ord x→x0 g(x), si ha
limx→x0
f(x) + g(x)
f(x)= lim
x→x0
(1 +
g(x)
f(x)
)= 1
(rispettivamente,
limx→x0
f(x) + g(x)
g(x)= lim
x→x0
(f(x)
g(x)+ 1
)= 1 ),
e da cio segue la tesi.2. Nelle ipotesi previste, si ha
limx→x0
f(x) + g(x)
(ℓ+ 1) g(x)=
ℓ
ℓ+ 1+
1
ℓ+ 1= 1 .
3. Infatti, se limx→x0
f(x)
g(x)= −1, si ha
limx→x0
f(x) + g(x)
g(x)= −1 + 1 = 0
e analogamente limx→x0f(x)+g(x)
g(x) = −1 + 1 = 0. #

6.10 Infinitesimi ed infiniti 159
Quindi la somma di due infinitesimi (rispettivamente, infiniti) non aven-ti lo stesso ordine in x0, e equivalente all’infinitesimo di ordine minore(rispettivamente, all’infinito di ordine maggiore).
Inoltre, nel caso della differenza di due infinitesimi o infiniti equivalen-ti, si puo prevedere il comportamento della somma nel caso in cui le duefunzioni non siano equivalenti (vedasi la 2. del teorema precedente); se cioaccade, si puo solo affermare la 3. del teorema precedente.
Teorema 6.10.7 (Prodotto di due infinitesimi o di due infiniti)Siano f e g due infinitesimi (rispettivamente, due infiniti) in x0. Allora, ilprodotto f · g e un infinitesimo (rispettivamente, un infinito) in x0 aventeordine maggiore sia di f che di g in x0.
In particolare, se α,β > 0, si ha
ordx→x0
f(x)><=α , ord
x→x0
g(x)><=β ⇒ ord
x→x0
f(x) · g(x)><=α+ β .
Dimostrazione. La dimostrazione e un’ovvia conseguenza delle definizioni di ordine e diinfinitesimi ed infiniti campione.
A titolo di esempio, si considera il caso in cui f sia un infinitesimo di ordine maggioredi α, g sia un infinitesimo di ordine maggiore di β ed il punto x0 sia reale. In questo caso
limx→x0
|f(x) · g(x)||x− x0|α+β
= limx→x0
|f(x)||x− x0|α
|g(x)||x− x0|β
= 0 ,
cioe ord x→x0 f(x) · g(x) > α+ β. #
In particolare, dal teorema precedente si deduce anche che f e un infini-tesimo (rispettivamente, un infinito) in x0 di ordine arbitrariamente piccoloe se g e un e un infinitesimo (rispettivamente, un infinito) in x0 di ordineminore di β per un certo β > 0, allora il prodotto f · g e un infinitesimo(rispettivamente, un infinito) in x0 di ordine arbitrariamente piccolo in x0.
Analogamente, se f e un infinitesimo (rispettivamente, un infinito) inx0 di ordine arbitrariamente grande e se g e un e un infinitesimo (rispet-tivamente, un infinito) in x0 di ordine maggiore di β per un certo β > 0,allora il prodotto f · g e un infinitesimo (rispettivamente, un infinito) in x0
di ordine arbitrariamente grande in x0.Se, invece, vengono moltiplicati un infinitesimo ed un infinito, si ha il
seguente risultato che si riconosce in maniera analoga.
Teorema 6.10.8 (Prodotto di un infinitesimo e di un infinito)Siano f un infinitesimo e g un infinito in x0. Si ha:
1. Se ord x→x0 f(x) < ord x→x0
1
g(x), allora f · g e un infinito in x0 e si
haordx→x0
f(x) · g(x) < ordx→x0
g(x) ;

160 Capitolo 6: Limiti delle funzioni reali
in particolare,
ordx→x0
f(x) = α , ordx→x0
g(x) = β ⇒ ordx→x0
f(x) · g(x) = β − α .
2. Se ord x→x0 f(x) > ord x→x0
1
g(x), allora f · g e un infinitesimo in x0
e si haordx→x0
f(x) · g(x) < ordx→x0
f(x) ;
in particolare,
ordx→x0
f(x) = α , ordx→x0
g(x) = β ⇒ ordx→x0
f(x) · g(x) = α− β .
3. Se f e g hanno lo stesso ordine in x0, allora il prodotto f · g non e neinfinitesimo ne infinito in x0.
Lo studio del quoziente tra due infinitesimi e/o infiniti in x0 deriva di-rettamente dai teoremi precedenti, tenendo presente che dividere per uninfinitesimo (rispettivamente, un infinito) in x= equivale a moltiplicare perl’infinito (rispettivamente, infinitesimo) reciproco in x0 (cio vale anche pergli infinitesimi ed infiniti campione).
Osservazione 6.10.9 Nel caso in cui siano noti gli ordini di infinitesimo odi infinito in x0 delle funzioni che figurano in un rapporto, si puo utilizzareun metodo pratico abbastanza semplice per determinare l’ordine del rap-porto. Innanzitutto si sceglie valutare l’ordine in termini di infinitesimi oinfiniti in x0. Nel primo caso si addizionano tutti gli ordini degli infinitesimiin x0 che compaiono al numeratore e degli infiniti in x0 che compaiono aldenominatore e a tale numero si sottrae la somma degli ordini degli infinitiin x0 che compaiono al numeratore e degli infinitesimi in x0 che compaio-no al denominatore. Se il numero cosı ottenuto e strettamente positivo, ilrapporto sara un infinitesimo in x0 avente come ordine tale numero, se in-vece e strettamente negativo, il rapporto sara un infinito in x0 avente comeordine l’opposto di tale numero (l’ordine in un punto e sempre un numerostrettamente positivo).
Nel secondo caso, si sceglie di valutare gli infiniti in x0, si addizionanotutti gli ordini degli infiniti in x0 che compaiono al numeratore e degli infini-tesimi in x0 che compaiono al denominatore e poi si sottrae la somma degliordini degli infinitesimi in x0 che compaiono al numeratore e degli infiniti inx0 che compaiono al denominatore. Se si ottiene un numero strettamentepositivo, il rapporto sara un infinito in x0 avente come ordine tale numero,se invece si ottiene un numero strettamente negativo, il rapporto sara uninfinitesimo in x0 avente come ordine l’opposto di tale numero.

6.10 Infinitesimi ed infiniti 161
In altre parole, ad un infinitesimo di un certo ordine, viene attribuito unordine di infinito opposto e analogamente, un infinito puo essere riguardatocome un infinitesimo di ordine opposto. Ad una funzione che none ne infi-nitesima ne infinita, ma tende verso un numero reale (diverso da 0) in x0,viene attribuito un ordine di infinitesimo e di infinito uguale a 0.
Tale metodo e basato naturalmente sui teoremi sul prodotto e sul quo-ziente di infinitesimi ed infiniti.
Infine, si esamina il caso delle funzioni composte.
Teorema 6.10.10 (Funzioni composte di infinitesimi o infiniti)Siano X e Y sottoinsiemi di R e siano f : X → R e g : Y → R funzioni reali.Si supponga che f(X) ⊂ Y e si consideri la funzione composta gf : X → R.Siano, inoltre, x0 ∈ R un punto di accumulazione per X e si supponga chelimx→x0 f(x) = y0, con y0 ∈ R punto di accumulazione per Y .
Se la funzione g e un infinitesimo (rispettivamente, un infinito) in y0,allora la funzione composta e un infinitesimo (rispettivamente, un infinito)in x0. Inoltre, se α,β > 0, si ha:
1. Se y0 ∈ R:
ordx→x0
(f(x)− y0)><=α , ord
x→x0
g(x)><=β ⇒ ord
x→x0
g(f(x))><=α · β .
2. Se y0 = ±∞:
ordx→x0
f(x)><=α , ord
x→x0
g(x)><=β ⇒ ord
x→x0
g(f(x))><=α · β .
Dimostrazione. Il fatto che la funzione composta sia un infinitesimo (rispettivamente,un infinito) in x0 segue direttamente dal Teorema 6.5.6 sul limite delle funzioni composte.
Per quanto riguarda la parte rimanente, si considera solo il caso x0, y0 ∈ R con
ordx→x0
(f(x)− y0) = α , ordx→x0
g(x) = β ,
essendo la dimostrazione di tutti gli altri casi del tutto analoga.Nelle ipotesi di sopra, si ha
limx → x0|g(f(x))|
|x− x0|α·β = limx → x0|g(f(x))|
|f(x)− y0|β|f(x)− y0|β
|x− x0|α·β
= lim y → y0|g(y))|
|y − y0|βlim
x→x0
(|f(x)− y0||x− x0|α
)β
= 1 ,
e quindi la tesi e vera. #

Capitolo 7
Successioni e serienumeriche
7.1 Limiti di successioni
Nella Sezione 6.9 del Capitolo 6, si e visto come la definizione generale dilimite puo essere applicata anche al caso delle successioni di numeri reali,potendo queste essere riguardate come funzioni reali definite in N. AvendoN come unico punto di accumulazione +∞, ha senso considerare il limite diuna successione (an)n∈N solamente in +∞; nel caso in cui tale limite esista,esso viene denotato con uno dei simboli
limn→+∞
an , limn
an
e viene denominato il limite della successione (an)n∈N (si puo sottintendere“nel punto +∞” in quanto cio non da luogo ad equivoci).
Piu esplicitamente, una successione (an)n∈N che ammette un limite ℓ ∈R, viene denominata regolare. Nel caso invece in cui non esista il limite,la successione si dice invece non regolare oppure oscillante. Una succes-sione regolare che ha come limite un numero reale, si dice convergente; se,invece, ha come limite +∞ oppure −∞, essa viene denominata divergentepositivamente oppure divergente negativamente.
La proprieta di una successione di essere convergente, divergente po-sitivamente o negativamente oppure oscillante viene spesso definita comecarattere della successione.
Esplicitamente, una successione (an)n∈N risulta
164 Capitolo 7: Successioni e serie numeriche
• convergente verso un numero reale ℓ se verifica la seguente condizione:
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : |an − ℓ| < ε ;
• divergente positivamente se verifica la seguente condizione:
∀ M ∈ R ∃ ν ∈ N t.c. ∀ n ≥ ν : an > M ;
• divergente negativamente se verifica la seguente condizione:
∀ M ∈ R ∃ ν ∈ N t.c. ∀ n ≥ ν : an < M .
Ovviamente, il modo in cui e stato definito il limite di una successioneconsente di applicare tutti i risultati gia visti per i limiti di una funzione nelpunto +∞. Tuttavia, alcuni di questi risultati assumono una forma parti-colare nel caso delle successioni ed altri possono essere espressi utilizzandole notazioni tipiche delle successioni. Pertanto, si passano brevemente inrassegna quei risultati che assumono una forma particolare nel caso dellesuccessioni.
Uno dei risultati che puo essere notevolmente migliorato nel caso dellesuccessioni e quello che riguarda la locale limitatezza. Infatti, la convergenzadi una successione comporta la sua limitatezza globale, come di seguitodimostrato.
Teorema 7.1.1 Sia (an)n∈N una successione di numeri reali. Allora:
1. (Limitatezza delle successioni convergenti)Se (an)n∈N e convergente, allora (an)n∈N e limitata.
2. Se (an)n∈N e divergente positivamente (rispettivamente, divergente ne-gativamente), allora (an)n∈N e limitata inferiormente (rispettivamen-te, superiormente).
Dimostrazione. 1) Si denoti con ℓ il limite della successione (an)n∈N. Applicando ladefinizione di limite con ε = 1 si trova ν ∈ N tale che, per ogni n ≥ ν, si abbia ℓ − 1 <an < ℓ+ 1. Osservato che l’insieme a0, a1, . . . , aν e finito, si possono ora considerare inumeri m = mina0, a1, . . . , aν , ℓ− 1, M = maxa0, a1, . . . , aν , ℓ+ 1. Allora, per ognin ∈ N, si ha m ≤ an ≤ M (cio si riconosce facilmente distinguendo i casi in cui n ≤ ν en ≥ ν) e cio completa la prima parte della dimostrazione.
2) Si supponga che (an)n∈N sia divergente positivamente. Applicando la definizione di
limite con M = 0, si trova ν ∈ N tale che, per ogni n ≥ ν, an > 0. Posto m =
mina0, a1, . . . , aν , 0, si ha, per ogni n ∈ N, m ≤ an e quindi la successione e limitata
inferiormente. La dimostrazione del caso rispettivo e analoga. #
Un ulteriore risultato che conviene considerare e l’analogo del Teorema6.6.3 sul limite delle funzioni monotone, che nel caso delle successioni siesprime come segue.

7.1 Limiti di successioni 165
Teorema 7.1.2 (Teorema sul limite delle successioni monotone)Ogni successione monotona (an)n∈N di numeri reali e regolare; precisamen-te, se (an)n∈N e crescente (rispettivamente, decrescente), si ha:
limn→+∞
an = supn∈N
an , (rispettivamente, limn→+∞
an = infn∈N
an ). (7.1.1)
Inoltre, se (an)n∈N e anche limitata, essa risulta convergente.
Dimostrazione. La prima parte della tesi segue dal Teorema 6.6.3. L’ultima parte deriva
dalla (7.1.1) e dal fatto che se una successione e limitata, allora supn∈N an ∈ R (nel caso
rispettivo, infn∈N an ∈ R). #
Ovviamente, per il carattere locale del limite, il teorema precedente con-tinua a valere anche se si suppone che la successione (an)n∈N sia definiti-vamente crescente (rispettivamente, definitivamente decrescente); in questocaso, tuttavia, se ν ∈ N e tale che (an)n≥ν sia crescente (rispettivamente,decrescente), la (7.1.1) deve essere sostituita con la seguente:
limn→+∞
an = supn≥ν
an , (rispettivamente, limn→+∞
an = infn≥ν
an ).
Poiche per le successioni valgono teoremi analoghi a quelli visti per ilimiti di funzioni, i limiti delle successioni possono spesso essere trattati erisolti nello stesso modo dei limiti di funzioni nel punto +∞. Nel seguito,tuttavia, sara possibile analizzare alcuni risultati specifici per le successioni.Prima di esaminarli, si studia la seguente caratterizzazione dell’esistenzadel limite di una funzione mediante limite di successioni, che costituisceappunto un legame tra limiti di funzioni e limiti di successioni.
Teorema 7.1.3 (Caratterizzazione sequenziale del limite)Siano X un sottoinsieme non vuoto di R, x0 ∈ R un punto di accumulazioneper X, f : X → R una funzione reale ed ℓ ∈ R.
Allora, le seguenti proposizioni sono equivalenti:
a) limx→x0
f(x) = ℓ.
b) Se (an)n∈N e una successione di elementi di X " x0 (cioe, per ognin ∈ N, si ha an ∈ X"x0) e se lim
n→+∞an = x0, allora lim
n→+∞f(an) =
ℓ.
Dimostrazione. a) ⇒ b) Sia (an)n∈N una successione di elementi di X " x0 tale chelimn→+∞ an = x0. Per dimostrare la b), si fissi un intorno arbitrario I di ℓ; dalla a), sipuo considerare un intorno J di x0 tale che, per ogni x ∈ X ∩J "x0, si abbia f(x) ∈ I.Poiche limn→+∞ an = x0, in corrispondenza dell’intorno J di x0, deve esistere ν ∈ N
166 Capitolo 7: Successioni e serie numeriche
tale che, per ogni n ≥ ν, risulti an ∈ J . Allora, per ogni n ≥ ν, si ha an ∈ X ∩ J " x0e conseguentemente f(an) ∈ I. Dall’arbitrarieta dell’intorno I di ℓ, segue la b).b) ⇒ a) Si supponga, per assurdo, che la a) sia falsa. Allora, deve esistere un intorno Idi ℓ tale che, comunque si consideri un intorno J di x0, deve esistere x ∈ X ∩ J " x0verificante la condizione f(x) /∈ I. Si ponga ora, per ogni n ∈ N,
Jn =
⎧⎪⎨
⎪⎩
]x0 −1
n+ 1, x0 +
1
n+ 1[ , se x0 ∈ R ;
]n,+∞[ , se x0 = +∞ ;]−∞,−n[ , se x0 = −∞ .
Per ogni n ∈ N, Jne un intorno di x0 e quindi deve esistere an ∈ X ∩ Jn " x0 tale che
f(an) /∈ I. Si consideri ora la successione (an)n∈N di elementi di X " x0. Si riconosce
facilmente che essa tende verso x0; infatti, per ogni n ∈ N, risulta |an − x0| < 1/(n+ 1)
se x0 ∈ R, mentre an > n oppure an < −n se x0 = +∞ oppure x0 = −∞. Allora, dalla
b) segue che la successione (f(an))n∈N deve tendere verso ℓ e cio e assurdo in quanto,
per ogni n ∈ N, f(an) /∈ I. #
Osservazione 7.1.4 La caratterizzazione precedente viene spesso utilizza-ta per dimostrare che un limite assegnato non esiste. A tal fine si puoprocedere in vari modi:
1. Si trovano due successioni (an)n∈N e (bn)n∈N di elementi di X " x0tali che lim
n→+∞an = x0 e lim
n→+∞bn = x0, mentre lim
n→+∞f(an) = ℓ1 e
limn→+∞
f(bn) = ℓ2 con ℓ1 = ℓ2.
In questo caso il limite di f in x0 non puo esistere perche dal Teorema7.1.3 dovrebbe essere da un lato uguale ad ℓ1 e dall’altro ad ℓ2 e ciocontraddice il teorema sull’unicita del limite.
2. Si trova una successione (an)n∈N di elementi di X"x0 che verifica lacondizione lim
n→+∞an = x0, mentre il lim
n→+∞f(an) non esiste. In questo
caso il limite di f in x0 non puo esistere altrimenti, dal Teorema 7.1.3,dovrebbe coincidere con il limite della successione (f(an))n∈N.
3. Si trova una successione (an)n∈N di elementi di X " x0 che verificala condizione lim
n→+∞an = x0 e per cui la successione (f(an))n∈N sia li-
mitata superiormente (rispettivamente, inferiormente), mentre la fun-zione non e limitata superiormente (rispettivamente, inferiormente)in alcun intorno di x0. In questo caso, per la proprieta di limitatezzalocale, il limite di f in x0 potrebbe essere solamente +∞ (rispettiva-mente, −∞) e cio comporterebbe, per il Teorema 7.1.3, che anche lasuccessione (f(an))n∈N dovrebbe essere divergente positivamente (ri-spettivamente, negativamente) in contraddizione con quanto assunto.Le ipotesi sopra previste sono soddisfatte se si trova una successione

7.1 Limiti di successioni 167
di elementi di X"x0 tendente verso x0 e in cui il limite e reale (op-pure la funzione e limitata) ed un’altra successione tendente verso x0
di punti di accumulazione per X in ognuno dei quali la funzione e uninfinito; in questo caso la contraddizione deriva dal fatto che avendotrovato una successione con un limite reale oppure in cui la funzionee limitata l’eventuale limite deve essere esso stesso reale; d’altra partese vi e una successione di punti in ognuno dei quali la funzione non elimitata, la funzione non risulta limitata in alcun intorno di x0 in con-trasto con la proprieta di limitatezza locale (ad esempio, si consideriil limite lim
x→+∞1/(x cosx) e le successioni an = 2nπ e bn = π/2+nπ).
Si considera ora qualche esempio.
Esempi 7.1.5
1. Utilizzando il teorema precedente, si dimostra che il limite
limx→+∞
sinx
non esiste.
Infatti, si considerino le successioni (π/2+2nπ)n∈N e (3π/2+2nπ)n∈N, entrambedivergenti positivamente. Si ha
limn→+∞
sin(π2+ 2nπ
)= 1 , lim
n→+∞sin
(3
2π + 2nπ
)= −1
e quindi, per l’Osservazione 7.1.4, 1., il limite in esame non esiste.
2. Piu in generale, l’esempio precedente dimostra che una funzione pe-riodica non costante non ammette limite nei punti +∞ e −∞. Infatti,si consideri una funzione f : X → R periodica non costante di periodoω > 0 e siano x1 ∈ X e x2 ∈ X tali che f(x1) = f(x2). Si conside-rino le successioni (x1 + nω)n∈N e (x2 + nω)n∈N; esse sono entram-be divergenti positivamente e inoltre limn→+∞ f(x1 + nω) = f(x1),limn→+∞ f(x2 + nω) = f(x2) con f(x1) = f(x2); allora, per l’Osser-vazione 7.1.4, 1., il limite limx→+∞ f(x) non puo esistere. Per quantoriguarda il punto −∞, si procede in modo analogo considerando lesuccessioni (x1 − nω)n∈N e (x2 − nω)n∈N.
Dal presente risultato si ricava in particolare che le funzioni trigono-metriche sin, cos, tan e cot non ammettono limite nei punti ±∞.
3. Si studi il limite
limx→−∞
tan2 x+ 1
x2.

168 Capitolo 7: Successioni e serie numeriche
Si consideri la funzione f(x) := (tan2 x+1)/x2 e la successione diver-gente negativamente (−nπ)n∈N. Tenendo presente che tan2(−nπ) = 0per ogni n ∈ N, se esistesse il limite assegnato, dovrebbe essere
limx→−∞
f(x) = limn→+∞
f(−nπ) = 0 .
Tuttavia, considerato un arbitrario intorno J di −∞, esiste sicuramen-te k ∈ Z tale che π/2 + kπ ∈ J . Poiche limx→π/2+kπ |f(x)| = +∞, lafunzione non e limitata in un intorno di π/2 + kπ e quindi in J . Perl’Osservazione 7.1.4, 3., il limite assegnato non puo esistere.
Si espongono ora alcuni risultati riguardanti la successione delle medie aritme-tiche e quella delle medie geometriche di una successione assegnata. Se (an)n∈N euna successione di numeri reali, la successione delle medie aritmetiche di (an)n∈Ne la successione (A[an])n∈N definita ponendo
A[an] :=a0 + · · ·+ an
n+ 1(=
1n+ 1
n∑
k=0
ak ).
Inoltre, se an > 0 per ogni n ∈ N,1 si puo definire la successione (G[an])n∈Ndelle medie geometriche di (an)n∈N ponendo
G[an] : n+1√a0 · · · an (= n+1
√√√√n∏
k=0
ak ).
I risultati seguenti sono noti come teoremi di Cesaro.
Teorema 7.1.6 (Teorema di Cesaro sulla media aritmetica)Sia (an)n∈N una successione regolare di numeri reali e sia ℓ ∈ R il suo limite.Allora la successione (A[an])n∈N delle medie aritmetiche di (an)n∈N e anch’essaregolare e tende verso ℓ.
Dimostrazione. Si supponga dapprima che (an)n∈N sia convergente, cioe che ℓ ∈ R e siaε > 0; allora esiste ν1 ∈ N tale che
∀ n ≥ ν1 : |an − ℓ| <ε
2.
Poiche la successione(
1n+1
∑ν1k=0 |ak − ℓ|
)
n∈Ntende a 0 in quanto il termine
∑ν1k=0 |ak−
ℓ| e costante, esiste ν2 ∈ N tale che
∀ n ≥ ν2 :1
n+ 1
ν1∑
k=0
|ak − ℓ| <ε
2.
1Cio assicura che la successione delle medie geometriche non sia definitivamente nulla.

7.1 Limiti di successioni 169
Allora, per ogni n > maxν1, ν2, si ha∣∣∣∣∣
1
n+ 1
n∑
k=0
ak − ℓ
∣∣∣∣∣ ≤1
n+ 1
n∑
k=0
|ak − ℓ|
=1
n+ 1
ν1∑
k=0
|ak − ℓ|+1
n+ 1
n∑
k=ν1+1
|ak − ℓ|
<ε
2+
1
n+ 1(n− ν1)
ε
2<ε
2+ε
2= ε .
Dall’arbitrarieta di ε > 0, segue la tesi.Si supponga ora che (an)n∈N sia divergente positivamente e sia M > 0. Allora esiste
ν1 ∈ N tale che∀ n ≥ ν1 : an > 4M .
Procedendo come prima, si puo considerare ν2 ∈ N tale che
∀ n ≥ ν2 :1
n+ 1
∣∣∣∣∣
ν1∑
k=0
ak
∣∣∣∣∣ < M .
Allora, per ogni n > max2ν1 +1, ν2, si ha innanzitutto (n− 1)/2 ≥ ν1 da cui n− ν1 ≥n− (n− 1)/2 = (n+ 1)/2 e pertanto
1
n+ 1
n∑
k=0
ak =1
n+ 1
ν1∑
k=0
ak +1
n+ 1
n∑
k=ν1+1
ak
≥ −1
n+ 1
∣∣∣∣∣
ν1∑
k=0
ak
∣∣∣∣∣+1
n+ 1
n∑
k=ν1+1
ak
> −M +1
n+ 1(n− ν1) 4M
≥ −M +1
n+ 1
n+ 1
24M = −M + 2M = M .
Dall’arbitrarieta di M > 0, segue la tesi anche in questo caso.
Se la successione e divergente negativamente, si procede in maniera analoga e quindi
la tesi e completamente dimostrata. #
Il risultato precedente non puo essere invertito, nel senso che la successionedelle medie aritmetiche puo risultare regolare pur non essendolo la successione dipartenza, come ad esempio per la successione ((−1)n)n∈N.
In alcuni casi l’utilizzo del risultato precedente consente di studiare piu age-volmente la regolarita di una successione assegnata.
Ad esempio, si consideri la successione (log n!/n)n≥1; poiche log n! = log n +log(n−1)+· · ·+log 2+log 1, essa e la media aritmetica della successione (log n)n≥1,la quale diverge positivamente; dal teorema precedente, segue pertanto che anche(log n!/n)n≥1 e divergente positivamente.
Teorema 7.1.7 (Teorema di Cesaro sulla media geometrica)Sia (an)n∈N una successione regolare di numeri reali strettamente positivi e siaℓ ∈ R il suo limite. Allora la successione (G[an])n∈N delle medie geometriche di(an)n∈N e anch’essa regolare e tende verso ℓ.

170 Capitolo 7: Successioni e serie numeriche
Dimostrazione. Si supponga dapprima che ℓ ∈]0,+∞[. Sia 0 < ε < 3; poiche lasuccessione (an/ℓ)n∈N converge verso 1, esiste ν1 ∈ N tale che
∀ n > ν1 : 1−ε
3<
anℓ
< 1 +ε
3;
da cio segue, per ogni n ≥ ν1 + 1,(1−
ε
3
)n+1<(1−
ε
3
)n−ν1<
aν1+1
ℓ· · ·
anℓ
<(1 +
ε
3
)n−ν1<(1 +
ε
3
)n+1
e quindi
1−ε
3< n+1
√aν1+1
ℓ· · ·
anℓ
< 1 +ε
3.
Anche la successione(
n+1√
a0/ℓ · · · aν1/ℓ)
n∈Nconverge verso 1 e quindi esiste ν2 ∈ N
tale che
∀ n ≥ ν2 : 1−ε
3< n+1
√a0ℓ
· · ·aν1ℓ
< 1 +ε
3.
Allora, per ogni n ≥= maxν1 + 1, ν2, si ha(1−
ε
3
)2=(1−
ε
3
) (1−
ε
3
)< n+1
√a0ℓ
· · ·aν1ℓ
n+1
√aν1+1
ℓ· · ·
anℓ
= n+1
√a0ℓ
· · ·anℓ
e analogamente
n+1
√a0ℓ
· · ·anℓ
<(1 +
ε
3
)2.
Da cio segue, essendo ε < 3,∣∣∣∣
n+1
√a0ℓ
· · ·anℓ
− 1
∣∣∣∣ <2
3ε+
1
9ε2 <
2
3ε+
1
93ε = ε .
Dall’arbitrarieta di ε > 0, si ottiene
limn→+∞
n+1√a0 · · · anℓ
= limn→+∞
n+1
√a0ℓ
· · ·anℓ
= 1
e quindi la tesi nel caso in esame.Si supponga ora ℓ = +∞ e sia M > 0. Allora esiste ν1 ∈ N tale che an > 2M per
ogni n ≥ ν1. Poiche la successione(
n+1√
a0/(2M) · · · aν1/(2M))
n∈Ntende ad 1, si puo
trovare ν2 ∈ N tale che, per ogni n ≥ ν2,
1
2= 1−
1
2< n+1
√a02M
· · ·aν12M
− 1 < 1 +1
2=
3
2.
Allora, posto ν = maxν1, ν2, per ogni n ≥ ν, si ha
M = 2M ·1
2< 2M · n+1
√a02M
· · ·aν12M
= n+1√a0 · · · aν1 2M(2M)−(ν1+1)/(n+1)
= n+1√a0 · · · aν1 (2M)(n−ν1)/(n+1) < n+1
√a0 · · · aν1 (an)
(n−ν1)/(n+1)
e dall’arbitrarieta di M > 0, segue la tesi anche in questo caso.Tenendo presente che gli elementi della successione (an)n∈N sono strettamente positi-
vi, resta da considerare solamente il caso in cui ℓ = 0. Se cio accade, si ha limn→+∞ 1/an =+∞ e quindi, per il caso precedente,
limn→+∞
n+1
√1
a0· · ·
1
aν1= +∞ ,
7.1 Limiti di successioni 171
cioe limn→+∞ 1/ n+1√a0 · · · aν1 = +∞; considerando il limite della successione reciproca
si ottiene quindi limn→+∞ n+1√a0 · · · aν1 = 0 e la tesi e completamente dimostrata. #
Anche per le medie geometriche, il risultato precedente non puo essere inver-tito, in quanto esistono successioni di numeri reali strettamente positivi che nonsono regolari, ma per le quali le successioni delle medie geometriche lo sono.
Ad esempio, si consideri il limite limn→+∞n√n!; il termine generale n
√n! e la
media geometrica della successione (n)n≥1 che e divergente positivamente. Dal
Teorema 7.1.7, anche la successione ( n√n!)n≥1 risulta divergente positivamente.
7.1.1 Successioni estratte
Come si e visto in precedenza molti risultati visti per le funzioni assumo-no una forma ed una terminologia particolare per le successioni; in accor-do a cio, si preferisce introdurre per le successioni il seguente concetto disuccessione estratta anziche far ricorso a quello piu generale di funzionecomposta.
Definizione 7.1.8 Sia (an)n∈N una successione di numeri reali e si consi-deri una successione strettamente crescente (k(n))n∈N di numeri naturali.Allora la successione (ak(n))n∈N viene denominata successione estratta di(an)n∈N.
Denotando la successione (an)n∈N come funzione a : N→ R e la succes-sione (k(n))n∈N come funzione k : N→ N, la successione estratta (ak(n))n∈Nrisulta essere la funzione composta a k : N → R; tuttavia, nel caso del-le successioni si richiede in piu la stretta crescenza di (k(n))n∈N in modoche le proprieta del limite della successione di partenza si conservino per lesuccessioni estratte.
Ad esempio, la successione(
2n2+2n+1n+2
)
n∈Nsi ottiene come estratta dalla
successione(
n2+1n+1
)
n∈N, considerando la successione di interi strettamente
crescente (2n+ 1)n∈N.
Si osserva che se (k(n))n∈N e una successione strettamente crescente dinumeri naturali, allora, per ogni n ∈ N, si ha n ≤ k(n).
Infatti, se n = 0 la proprieta e vera e supposto che essa valga per n ∈ N, dalla stretta
crescenza si ha k(n) < k(n+ 1) da cui n+ 1 ≤ k(n) + 1 ≤ k(n+ 1). #
Da tale semplice proprieta segue il comportamento del limite delle suc-cessioni estratte descritto nella proposizione successiva.

172 Capitolo 7: Successioni e serie numeriche
Proposizione 7.1.9 Sia (an)n∈N una successione regolare di numeri reali.Allora, ogni successione estratta (ak(n))n∈N di (an)n∈N e anch’essa regolaree si ha
limn→+∞
ak(n) = limn→+∞
an .
Dimostrazione. Sia ℓ ∈ R il limite della successione (an)n∈N e sia I un intorno di ℓ;
allora esiste ν ∈ N tale che an ∈ I per ogni n ≥ ν. Da quanto osservato per ogni n ≥ ν
si ha anche k(n) ≥ n ≥ ν e quindi ak(n) ∈ I. Dall’arbitrarieta dell’intorno I di ℓ, segue
la tesi. #
Come conseguenza della Proposizione 7.1.9, tutte le successioni estrattedi una successione regolare convergono verso lo stesso limite. Si deduce cheuna successione (an)n∈N che ammette un’estratta non regolare oppure condue estratte regolari aventi limiti diversi, non puo essere regolare. Questometodo viene spesso utilizzato per dimostrare che il limite di una successioneassegnata non esiste.
Ad esempio, si studi il limite della successione ((−1)nan)n∈N, dove (an)n∈Ne una successione regolare tendente ad un numero ℓ = 0. Allora, consideran-do l’estratta corrispondente alla successione strettamente crescente (2n)n∈N,si ottiene la successione (a2n)n∈N che tende verso ℓ; considerando invece l’e-stratta corrispondente alla successione strettamente crescente (2n+ 1)n∈N,si ottiene la successione (−a2n+1)n∈N che tende verso −ℓ. Si deduce che illimite della successione assegnata non esiste in quanto ℓ = 0.
7.1.2 Massimo e minimo limite
Se una successione non e regolare, si ricorre ad ulteriori strumenti che con-sentono di studiarne il comportamento, tra cui ad esempio il massimo eminimo limite, definiti come segue.
Si consideri una successione (an)n∈N. Se essa non e limitata superior-mente, il suo massimo limite viene assunto, per definizione, uguale a +∞e analogamente, se essa non e limitata inferiormente, il suo minimo limiteviene assunto uguale a −∞.
Si supponga ora che (an)n∈N sia limitata superiormente (rispettivamen-te, inferiormente); per ogni k ∈ N, la successione estratta (ak)n≥k (ottenutaconsiderando gli indici k(n) = k + n) ha lo stesso comportamento dellasuccessione (an)n∈N. Si considerino le quantita
e′′k := supn≥k
an (rispettivamente, e′k := infn≥k
an ).

7.1 Limiti di successioni 173
E immediato riconoscere che la nuova successione (e′′k)k∈N e decrescente equindi essa risulta regolare; il limite
ℓ′′ := limk→+∞
e′′k (= infk∈N
e′′k)
viene denominatomassimo limite della successione (an)n∈N e viene denotatocon uno dei seguenti simboli
lim supn→+∞
an , lim′′n→+∞
an , limn→+∞
an .
Poiche (e′′k)k∈N e decrescente, il massimo limite e sicuramente diverso da+∞.
Nel caso rispettivo, la successione (e′k)k∈N e crescente ed il suo limite
ℓ′ := limk→+∞
e′k (= supk∈N
e′k)
viene denominato minimo limite della successione (an)n∈N e viene denotatocon uno dei seguenti simboli
lim infn→+∞
an , lim′n→+∞
an , limn→+∞
an .
Poiche (e′k)k∈N e crescente, il minimo limite e sicuramente diverso da−∞.
Il massimo ed il minimo limite sono unici ed a differenza del limite diuna successione esistono sempre.
Nella proposizione successiva vengono enunciate le proprieta caratteristichedel massimo e minimo limite, alle quali conviene ricorrere nelle applicazioni.
Proposizione 7.1.10 Sia (an)n∈N una successione di numeri reali e sia ℓ ∈ R.Allora, le seguenti proposizioni sono equivalenti:
a) ℓ = lim supn→+∞
an (rispettivamente, ℓ = lim infn→+∞
an );
b) 1) ∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : an < ℓ+ ε
(rispettivamente, ∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : ℓ− ε < an ).
2) ∀ ε > 0 ∀ ν ∈ N ∃ n ≥ ν t.c. ℓ− ε < an
(rispettivamente, ∀ ε > 0 ∀ ν ∈ N ∃ n ≥ ν t.c. an < ℓ+ ε ).
Dimostrazione. Si considera solamente il primo caso, essendo quello rispettivo del tuttoanalogo.a)⇒ b) Poiche ℓ ∈ R, la successione (an)n∈N e necessariamente limitata superiormente.Fissato ε > 0, dalla seconda proprieta dell’estremo inferiore esiste ν ∈ N tale che e′′ν <ℓ + ε; conseguentemente, dalla prima proprieta dell’estremo superiore si ha, per ognin ≥ ν, an < ℓ + ε. Cio dimostra la proprieta 1). Siano ora ε > 0 e ν ∈ N fissati. Dalla

174 Capitolo 7: Successioni e serie numeriche
prima proprieta dell’estremo inferiore, si ha ℓ− ε < e′′ν ; conseguentemente, dalla secondaproprieta dell’estremo superiore si deduce l’esistenza di n ≥ ν tale che ℓ− ε < an.
b)⇒ a) Basta far vedere che ℓ verifica le proprieta caratteristiche dell’estremo inferiore
della successione (e′′k)k∈N. Infatti, sia k ∈ N; dalla 2) della b), per ogni ε > 0 esiste n ∈ Ntale che n ≥ k e ℓ − ε < an; da cio segue ℓ − ε < supn≥k an = e′′k e quindi ℓ ≤ e′′k + ε;
poiche ε > 0 e arbitrario, si deve avere ℓ ≤ e′′k . Cio dimostra che ℓ verifica la prima
proprieta caratteristica dell’estremo inferiore. Sia ora ε > 0; dalla 1) della b), esiste
ν ∈ N tale che an < ℓ+ ε per ogni n ≥ ν; allora ℓ+ ε e un maggiorante della successione
(an)n≥ν e quindi deve essere e′′ν ≤ ℓ + ε; pertanto ℓ verifica anche la seconda proprieta
caratteristica dell’estremo inferiore da cui la tesi. #
La proprieta 2) della b) si puo esprimere equivalentemente nel modo seguente:
2’) Per ogni ε > 0, l’insieme n ∈ N | ℓ− ε < an e infinito
(rispettivamente, per ogni ε > 0, l’insieme n ∈ N | an < ℓ+ ε) e infinito.
Infatti, si supponga vera la proprieta 2) e si fissi ε > 0. Se, per assurdo, l’insieme
n ∈ N | ℓ−ε < an fosse finito, esso sarebbe dotato di massimo ν ∈ N. Allora, applicando
la proprieta 2) al numero naturale ν + 1 si troverebbe un elemento n ≥ ν + 1 tale che
ℓ−ε < an e cio contraddirebbe il fatto che ν e il massimo n ∈ N | ℓ−ε < an. Viceversa,
si supponga vera la proprieta 2’) e siano ε > 0 e ν ∈ N. Se, per assurdo, non esistesse
alcun elemento n ≥ ν tale che ℓ−ε < an, l’insieme n ∈ N | ℓ−ε < an sarebbe contenuto
in 0, 1, 2, . . . , ν e quindi sarebbe finito; cio contraddice evidentemente la proprieta 2’).
Poiche ovviamente e′k ≤ e′′k per ogni k ∈ N si ha sempre
ℓ′ ≤ ℓ′′ .
L’uguaglianza del massimo e del minimo limite e caratterizzata dalla proposizionesuccessiva.
Proposizione 7.1.11 Se (an)n∈N e una successione di numeri reali, le seguentiproposizioni sono equivalenti:
a) La successione (an)n∈N e regolare;
b) lim supn→+∞
an = lim infn→+∞
an .
Inoltre, vera l’una e quindi ciascuna delle proposizioni equivalenti precedenti,risulta
limn→+∞
an = lim supn→+∞
an = lim infn→+∞
an .
Dimostrazione. Per brevita si denotano con ℓ′′ e rispettivamente ℓ′ il massimo e rispet-tivamente il minimo limite della successione (an)n∈N.a)⇒ b) Si ponga ℓ = limn→+∞ an. Se ℓ = +∞ si ha e′k = +∞ per ogni k ∈ N e quindiℓ′ = ℓ′′ = +∞ da cui la tesi. Analogamente, se ℓ = −∞, si ha e′′k = −∞ per ogni k ∈ Ne quindi ancora ℓ′ = ℓ′′ = −∞. Si supponga pertanto ℓ ∈ R; in tal caso, e immediatoverificare che ℓ verifica le proprieta caratteristiche sia del massimo che del minimo limite(Proposizione 7.1.10) e quindi ℓ = ℓ′ = ℓ′′; da cio segue anche l’ultima parte della tesi.
b)⇒ a) Si ponga ℓ = ℓ′(= ℓ′′). Se ℓ = +∞, si ha ℓ′ = +∞ e quindi, per ogni M ∈ R deve
esistere ν ∈ N tale che e′k > M per ogni n ≥ ν; considerando n = ν, dalla definizione

7.1 Limiti di successioni 175
di e′ν segue allora an > M per ogni n ≥ ν e cio dimostra che la successione (an)n∈N e
divergente positivamente. Se ℓ = −∞, si procede in maniera analoga considerando ℓ′′.
Si supponga ora ℓ ∈ R; dalle proprieta caratteristiche del massimo e del minimo limite
(Proposizione 7.1.10), segue, per ogni ε > 0, da un lato l’esistenza di ν1 ∈ N tale che
an < ℓ + ε per ogni n ≥ ν1, e dall’altro l’esistenza di ν2 ∈ N tale che ℓ − ε < an per
ogni n ≥ ν2; posto ν = maxν1, ν2, per ogni n ≥ ν, si ha allora ℓ − ε < an < ℓ + ε.
Dall’arbitrarieta di ε > 0, segue ℓ = limn→+∞ an. #
Per dimostrare facilmente la proprieta successiva, conviene osservare che comeconseguenza delle proprieta caratteristiche del massimo e del minimo limite enun-ciate nella Proposizione 7.1.10, si ha anche la seguente, dove ℓ denota il massimolimite (rispettivamente, il minimo limite) della successione (an)n∈N
∀ ε > 0 ∀ ν ∈ N ∃ n ≥ ν t.c. ℓ− ε < an < ℓ+ ε . (7.1.2)
Infatti, se ℓ e il massimo limite della successione (an)n∈N, fissati ε > 0 e ν ∈ N, dallaproprieta 1) della b) nella Proposizione 7.1.10, si ha l’esistenza di ν1 ∈ N tale che an < ℓ+ε
per ogni n ≥ ν1. Applicando la proprieta 2) della b) nella stessa Proposizione 7.1.10 con
maxν, ν1 al posto di ν si ottiene l’esistenza di n ≥ maxν, ν1 tale che ℓ − ε < an;
dunque n ≥ ν e poiche n ≥ ν1, per tale n si ha anche an < ℓ+ ε, da cui la tesi. Se ℓ e il
minimo limite della successione (an)n∈N, si procede ovviamente in maniera analoga.
Si e visto in precedenza che se una successione e regolare, tutte le sue estrattelo sono e tendono verso lo stesso limite (Proposizione 7.1.9). Nel caso generale, siha il seguente risultato.
Proposizione 7.1.12 Sia (an)n∈N una successione di numeri reali e siano ℓ′′ edℓ′ il suo massimo limite e rispettivamente il suo minimo limite. Allora esistonoalmeno due successioni estratte (ak1(n))n∈N e (ak2(n))n∈N regolari e tali che
limn→+∞
ak1(n) = ℓ′′ , limn→+∞
ak2(n) = ℓ′ .
Dimostrazione. Si dimostra solamente l’esistenza dell’estratta (ak1(n))n∈N. La succes-
sione strettamente crescente (k1(n))n∈N di numeri naturali viene definita induttivamente
applicando la proprieta (7.1.2). Considerando ε = 1 e ν = 0, dalla (7.1.2), si ottiene
l’esistenza di k(0) ∈ N tale che ℓ′′ − 1 < ak(0) < ℓ′′ + 1. Si riapplica ora la stessa pro-
prieta (7.1.2) con ε = 1/2 e ν = k(0) + 1 e si ottiene l’esistenza di un elemento k(1) ∈ N,k(1) ≥ ν tale che ℓ′′ − 1/2 < ak(1) < ℓ′′ + 1/2; si osservi che k(1) > k(0) in quanto si
e considerato ν = k(0) + 1. Procedendo in questo modo, si puo considerare una succes-
sione strettamente crescente (k(n))n∈N di interi positivi tale che, per ogni n ∈ N, risultiℓ′′ − 1/(n + 1) < ak(n) < ℓ′′ + 1/(n + 1). Dal primo teorema di confronto per i limiti
segue subito che la successione estratta (ak(n))n∈N converge verso ℓ′′. #
Come conseguenza del risultato precedente, si puo enunciare il seguente corol-lario.
Corollario 7.1.13 Sia (an)n∈N una successione di numeri reali. Allora:

176 Capitolo 7: Successioni e serie numeriche
1) Se (an)n∈N non e limitata superiormente, essa ammette un’estratta diver-gente positivamente.
2) Se (an)n∈N non e limitata inferiormente, essa ammette un’estratta diver-gente negativamente.
3) Se (an)n∈N e limitata superiormente oppure inferiormente, essa ammetteun’estratta convergente.
Dimostrazione. Nel primo caso il massimo limite della successione e +∞ e quindi la tesi
segue dalla Proposizione 7.1.12 precedente. Il secondo caso e analogo in quanto il minimo
limite e −∞. Infine, se la successione e limitata superiormente oppure inferiormente
almeno uno tra il massimo limite ed il minimo limite della successione e un numero reale
e quindi la tesi segue ancora dalla Proposizione 7.1.12. #
A questo punto si puo dimostrare facilmente un risultato molto importanteper le sue numerose applicazioni.
Si osserva innanzitutto che se (an)n∈N e una successione di numeri reali con-vergente verso un numero reale ℓ e se l’insieme A := an | n ∈ N degli elementidella successione e infinito, allora ℓ e un punto di accumulazione per A.
Infatti, considerato ε > 0, esiste ν ∈ N tale che an ∈]ℓ− ε, ℓ+ ε[ per ogni n ≥ ν. Gli
elementi della successione (an)n∈N sono infiniti e quindi deve esistere almeno un n ≥ ν
tale che an = ℓ; l’elemento an appartiene dunque all’insieme A∩]ℓ − ε, ℓ + ε["ℓ che
risulta pertanto non vuoto. Poiche ε > 0 e arbitrario, si conclude che ℓ e un punto di
accumulazione per A. #
Teorema 7.1.14 (Teorema di Bolzano-Weierstrass) Sia X un sottoinsiemelimitato ed infinito di R. Allora X e dotato di almeno un punto di accumulazione.
Dimostrazione. L’insieme X e infinito e quindi si puo considerare una successione
(an)n∈N di elementi di X a due a due distinti; infatti, considerato a0 ∈ X, poiche X e in-
finito si puo considerare poi a1 ∈ X"a0; procedendo in questo modo, supposto di aver
definito l’elemento an, si sceglie poi an+1 nell’insieme (infinito) X " a0, a1, . . . , an. Si
ottiene cosı una successione (an)n∈N di elementi di X tale che an = am per ogni n = m e
quindi il cui insieme degli elementi e sicuramente infinito. Gli elementi della successione
(an)n∈N appartengono all’insieme limitato X e quindi (an)n∈N e anch’essa limitata; dal
Corollario 7.1.13, 3), si ottiene l’esistenza di una successione estratta (ak(n))n∈N della
successione (an)n∈N convergente verso un numero reale ℓ. Allora anche (ak(n))n∈N e
una successione di elementi distinti di X e dalle osservazioni preliminari ℓ e un punto di
accumulazione per l’insieme dei suoi elementi; ma tale insieme e contenuto in X e quindi
ℓ e un punto di accumulazione anche per X. #
7.1.3 Criterio di convergenza di Cauchy
Il criterio di convergenza di seguito esposto e utile per stabilire la conver-genza di una successione senza necessariamente individuarne il limite.

7.1 Limiti di successioni 177
Teorema 7.1.15 (Criterio di Cauchy per le successioni)Sia (an)n∈N una successione di numeri reali. Allora, le seguenti proposizionisono equivalenti:
a) La successione (an)n∈N e convergente.
b) La successione (an)n∈N verifica la seguente condizione
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν, ∀ m ≥ ν : |an − am| < ε .
Dimostrazione. a)⇒ b) Sia ℓ il limite della successione (an)n∈N e si fissi ε > 0. Alloraesiste ν ∈ N tale che |an−ℓ| < ε/2 per ogni n ≥ ν. Conseguentemente, per ogni n,m ≥ ν,si ha |an − am| = |(an − ℓ) + (ℓ − am)| ≤ |an − ℓ| + |am − ℓ| < ε/2 + ε/2 = ε e quindi(an)n∈N verifica la condizione la b).b)⇒ a) Si dimostra innanzitutto che la successione (an)n∈N e limitata. Applicando laproprieta b) con ε = 1, si ottiene l’esistenza di ν ∈ N tale che |an − am| < 1 per ognin,m ≥ ν; in particolare, per ogni n ≥ ν, si ha aν − 1 < an < aν + 1. Allora, postom = mina0, . . . , aν−1, aν − 1 ed M = maxa0, . . . , aν−1, aν + 1, si ha m ≤ an ≤ Mper ogni n ∈ N e cio dimostra che la successione (an)n∈N e limitata. Si denotino ora conℓ′′ ed ℓ′ il massimo limite e rispettivamente il minimo limite della successione (an)n∈N,che per quanto osservato devono essere reali e ℓ′ ≤ ℓ′′. Si fissi ora ε > 0; dalla b), esisteν ∈ N tale che |an − am| < ε/3 per ogni n,m ≥ ν. Dalla seconda proprieta caratteristicadel massimo limite applicata ad ε/3 e ν (vedasi la b) della Proposizione 7.1.10, esisten ≥ ν tale che ℓ′′ − ε/3 < an e analogamente, dalla seconda proprieta caratteristica delminimo limite, esiste m ≥ ν tale che am < ℓ′ + ε/3. Allora, poiche n,m ≥ ν, si ha
ℓ′′ − ℓ′ < an +ε
3− am +
ε
3≤ |an − am|+
2
3ε <
ε
3+
2
3ε = ε,
e conseguentemente ℓ′′ < ℓ′ + ε; poiche ε > 0 e arbitrario, segue ℓ′′ ≤ ℓ′ e quindi ℓ′′ = ℓ′.
Dalla Proposizione 7.1.11, si conclude che (an)n∈N e convergente. #
Una successione (an)n∈N che verifica la condizione b) del Teorema 7.1.15precedente viene denominata successione di Cauchy (oppure successionefondamentale).
7.1.4 Massimo e minimo limite per le funzioni
Il massimo e minimo limite puo essere introdotto anche piu in generale peril limite di una funzione arbitraria. Nella presente sezione viene consideratabrevemente tale possibilita.
Siano X un sottoinsieme di R, x0 ∈ R un punto di accumulazione per Xed f : X → R una funzione reale. Se f non e limitata superiormente in alcunintorno di x0, il massimo limite viene assunto uguale a +∞ e analogamentese f non e limitata inferiormente in alcun intorno di x0, il minimo limiteviene assunto uguale a −∞. Nel seguito, pertanto, si escluderanno tali casie, poiche le nozioni che si vogliono introdurre sono di carattere locale, sisupporra che la funzione f sia limitata (altrimenti basta sostituirla con unarestrizione ad un opportuno intorno di x0 in cui e limitata).

178 Capitolo 7: Successioni e serie numeriche
Se x0 ∈ R, per ogni δ > 0, si definiscono i numeri
e′′(δ) := supf(x) | x ∈ X∩]x0 − δ, x0 + δ["x0 ,
e′(δ) := inff(x) | x ∈ X∩]x0 − δ, x0 + δ["x0 .
La funzione δ 4→ e′′(δ) da ]0,+∞[ in R e crescente e la funzione δ 4→ e′(δ)da ]0,+∞[ in R e decrescente e inoltre, per ogni δ1 > 0, δ2 > 0, risultae′(δ1) ≤ e′′(δ2). Dal teorema sul limite delle funzioni monotone, si possonoconsiderare i seguenti limiti
limδ→0+
e′′(δ) (= infδ>0
e′′(δ)) , limδ→0+
e′(δ) (= supδ>0
e′(δ)) ,
i quali vengono denominati massimo limite e rispettivamente minimo limitedi f in x0 e denotati con uno dei seguenti simboli
lim supx→x0
f(x) , lim′′x→x0
f(x) , limx→x0
f(x) ,
e rispettivamente
lim infx→x0
f(x) , lim′x→x0
f(x) , limx→x0
f(x) .
Se x0 = +∞ (rispettivamente, x0 = −∞), si procede in maniera analogadefinendo i seguenti numeri, per ogni c ∈ R,
e′′(c) := supf(x) | x ∈ X∩]c,+∞[(rispettivamente, e′′(c) := supf(x) | x ∈ X∩]−∞, c[ )
e
e′(c) := inff(x) | x ∈ X∩]c,+∞[(rispettivamente, e′(c) := inff(x) | x ∈ X∩]−∞, c[ ).
La funzione c 4→ e′′(c) da R in R e ovviamente decrescente (rispettivamente,crescente), mentre la funzione c 4→ e′(c) da R in R e crescente (rispettiva-mente, decrescente) e per ogni c1, c2 ∈ R, risulta e′(c1) ≤ e′′(c2). Il massimolimite ed il minimo limite possono ora essere definiti tramite i seguenti limiti,esistenti sempre per il teorema sul limite delle funzioni monotone
limc→+∞
e′′(c) , (rispettivamente, limc→−∞
e′′(c) ),
elim
c→+∞e′(c) , (rispettivamente, lim
c→−∞e′(c) ).

7.2 Serie numeriche 179
Le proprieta caratteristiche del massimo e del minimo limite di una fun-zione possono essere ottenute in maniera esattamente analoga a quanto giavisto per le successioni. A causa della stretta analogia con il caso delle suc-cessioni, ci si limita a questo punto ad enunciare alcune proprieta omettendole dimostrazioni.
Proposizione 7.1.16 Si considerino un sottoinsieme X di R, un punto diaccumulazione x0 ∈ R per X ed una funzione reale f : X → R. Allora leseguenti proposizioni sono equivalenti:
a) Esiste il limite limx→x0
f(x).
b) lim supx→x0
f(x) = lim infx→x0
f(x) .
Inoltre, vera l’una e quindi ciascuna delle proposizioni equivalenti preceden-ti, risulta
limx→x0
f(x) = lim supx→x0
f(x) = lim infx→x0
f(x) .
Se X e un sottoinsieme di R, x0 ∈ R e un punto di accumulazione perX ed f : X → R e una funzione reale, si dice che f verifica la condizione diCauchy in x0 se
∀ ε > 0 ∃ I ∈ I(x0) t.c. ∀ x, y ∈ X ∩ I " x0 : |f(x)− f(y)| < ε .
Teorema 7.1.17 (Criterio di Cauchy per le funzioni)Si considerino un sottoinsieme X di R, un punto di accumulazione x0 ∈ Rper X ed una funzione reale f : X → R. Allora, le seguenti proposizionisono equivalenti:
a) Esiste ed e finito il limite limx→x0
f(x).
b) f verifica la condizione di Cauchy in x0 .
7.2 Serie numeriche
Lo studio delle serie numeriche trova diverse applicazioni in analisi riguar-danti, ad esempio, la possibilita di esprimere le funzioni elementari comesomma di funzioni potenza ad esponente intero positivo, con il conseguen-te vantaggio di ricondurre il calcolo di limiti, derivate ed integrali a quellodi funzioni potenza oppure lo stretto legame con la teoria degli integraliimpropri su intervalli illimitati.

180 Capitolo 7: Successioni e serie numeriche
7.2.1 Definizioni e proprieta preliminari
Assegnata una successione (an)n∈N di numeri reali, per ogni m ∈ N, sidefinisce somma parziale m-esima di (an)n∈N il numero sm definito comesegue
sm :=m∑
n=0
an .
La successione (sn)n∈N viene denominata serie di termine generale n-esimo an; i numeri sm, m ∈ N, vengono anche denominati somme parzialidella serie. Una serie viene in genere indicata con il simbolo
+∞∑
n=0
an
e talvolta anche con a0 + a1 + · · · + an + . . . Il carattere della successione(sn)n∈N viene indicato come carattere della serie; pertanto, si dice che unaserie e regolare, convergente, divergente positivamente oppure divergentenegativamente se tale e la successione delle sue somme parziali. Una serienon regolare viene denominata indeterminata. Nel caso in cui la serie siaregolare, il limite della successione delle somme parziali viene denominato
somma della serie e denotato ancora con il simbolo+∞∑
n=0
an; sara chiaro dal
contesto l’uso di tale simbolo.Esplicitamente, se s ∈ R, si ha
s =+∞∑
n=0
an ⇐⇒ ∀ ε > 0 ∃ ν ∈ N t.c.∀ n ≥ ν :
∣∣∣∣∣s−n∑
k=0
ak
∣∣∣∣∣ < ε .
Analogamente, si ha+∞∑
n=0
an = +∞ (rispettivamente+∞∑
n=0
an = −∞) se e solo
se
∀ M ∈ R ∃ ν ∈ N t.c.∀ n ≥ ν :n∑
k=0
ak > M (rispettivamente < M ).
Una prima condizione necessaria per la convergenza di una serie puoessere ricavata facilmente dalle definizioni assunte.
Proposizione 7.2.1 Sia (an)n∈N una successione di numeri reali e si sup-ponga che la serie
∑+∞n=0 an sia convergente. Allora limn→+∞ an = 0.

7.2 Serie numeriche 181
Dimostrazione. Si consideri la successione (sn)n∈N delle somme parziali della serie∑+∞n=0 an e sia s ∈ R la somma della stessa serie. Allora
limn→+∞
an = limn→+∞
(sn − sn−1) = limn→+∞
sn − limn→+∞
sn−1 = s− s = 0. #
La condizione precedente non e in generale sufficiente ad assicurare laconvergenza di una serie. Ad esempio, la successione (log(1 + 1/n))n≥1 eovviamente infinitesima, ma la somma parziale n-esima e data da
sn = log 2+ log3
2+ · · ·+log
n+ 1
n= log
(2 · 3
2· 43· · · n+ 1
n
)= log(n+1) ,
e quindi la serie∑+∞
n=0 log(1 + 1/n) e divergente positivamente.
Esempio 7.2.2 (Serie geometrica)Un esempio importante per il seguito e dato dalla serie
+∞∑
n=0
an ,
con a ∈ R, la quale viene denominata serie geometrica di ragione a. Perogni n ∈ N, denotata con sn la somma parziale n-esima, risulta an+1 − 1 =(a− 1)(an + an−1 + · · ·+ a+ 1) = (a− 1)sn, e quindi, supposto a = 1,
sn =an+1 − 1
a− 1.
Da cio consegue direttamente che, se |a| < 1, la serie e convergente e si ha
+∞∑
n=0
an = limn→+∞
sn =1
1− a.
Se a ≥ 1 oppure a ≤ −1, la successione (an)n∈N non e infinitesima e quindidalla Proposizione 7.2.1 la serie geometrica non puo essere convergente.Precisamente, se a ≥ 1, essa diverge positivamente (infatti, per ogni n ∈ N,risulta sn ≥ n), mentre se a ≤ −1, la serie e indeterminata; infatti, si hasn ≥ 1 per n pari ed sn ≤ 0 per n dispari.
Una prima condizione necessaria e sufficiente per la convergenza di una serie puoessere ricavata dal criterio di convergenza di Cauchy per le successioni. Sia (an)n∈N unasuccessione di numeri reali e sia n ∈ N. Il resto n-esimo della serie
∑+∞n=0 an (oppure
serie resto di ordine n) e per definizione la nuova serie
+∞∑
k=n+1
ak .
182 Capitolo 7: Successioni e serie numeriche
Si riconosce facilmente che una serie e le sue serie resto hanno lo stesso carattere e inoltre,se una delle due e convergente risulta
+∞∑
n=0
an = sn ++∞∑
k=n+1
ak .
Dall’uguaglianza precedente segue che se la serie∑+∞
n=0 an e convergente, allora necessa-riamente la successione (rn)n∈N dei resti n-esimi e infinitesima. Infatti, denotata con sla somma della serie
∑+∞n=0 an, deve essere limn→+∞ rn = limn→+∞ s− sn = 0.
La somma parziale p-esima del resto n-esimo rn viene denominata resto parziale dellaserie di indici n e p e viene denotato con rn,p; quindi
rn,p =n+p∑
k=n+1
ak = sn+p − sn .
Si puo ora enunciare il seguente criterio di convergenza di Cauchy, la cui dimostrazio-ne e immediata conseguenza del Teorema 7.1.15 applicato alla successione delle sommeparziali.
Teorema 7.2.3 (Criterio di Cauchy per le serie numeriche)Se (an)n∈N e una successione di numeri reali, le seguenti proposizioni sono equivalenti:
a) La serie+∞∑
n=0
an e convergente.
b) limn→+∞
supp∈N
|rn,p| = 0 .
Esempio 7.2.4 (Serie armonica) Si consideri la serie
+∞∑
n=0
1
n+ 1,
la quale viene denominata serie armonica. Per ogni n, p ∈ N si ha
|rn,p| =n+p∑
k=n+1
1
k + 1=
1
n+ 2+
1
n+ 3+ · · ·+ 1
n+ p+ 1≥ p
1
n+ p+ 1;
considerando in particolare p = n+ 1, si ottiene
|rn,n+1| ≥n+ 1
2n+ 2=
1
2
e quindi la b) del Teorema 7.2.3 non puo essere verificata. Si conclude chela serie armonica non e convergente. Osservando inoltre che la successio-ne delle somme parziali risulta crescente, la serie dovra essere divergentepositivamente.
Alcune semplici operazioni algebriche sulle serie possono essere dedotte dai teoremisui limiti di successioni. Si considerino due successioni (an)n∈N e (bn)n∈N di numeri realie le serie
∑+∞n=0 an e
∑+∞n=0 bn si ha quanto segue

7.2 Serie numeriche 183
1) Se le due serie sono entrambe convergenti, anche la loro somma∑+∞
n=0(an + bn) econvergente e si ha
+∞∑
n=0
(an + bn) =+∞∑
n=0
an ++∞∑
n=0
bn ;
2) Se una delle due serie e divergente positivamente (rispettivamente, negativamen-te), e se le somme parziali dell’altra sono limitate inferiormente (rispettivamen-te, superiormente) (in particolare, se l’altra serie e convergente), allora la serie∑+∞
n=0(an+bn) risulta divergente positivamente (rispettivamente, negativamente).
3) Se la serie∑+∞
n=0 an e convergente e se λ ∈ R, allora anche la serie∑+∞
n=0 λan econvergente e si ha
+∞∑
n=0
λan = λ+∞∑
n=0
an .
4) Se la serie∑+∞
n=0 an e divergente positivamente (rispettivamente, negativamente)
e se λ > 0, allora anche la serie∑+∞
n=0 λan e divergente positivamente (rispet-
tivamente, negativamente). Se invece λ < 0, la serie∑+∞
n=0 λan e divergentenegativamente (rispettivamente, positivamente).
7.2.2 Serie a termini positivi
Una serie∑+∞
n=0 an tale che an ≥ 0 per ogni n ∈ N viene denominata seriea termini positivi ; se an > 0 per ogni n ∈ N si dice anche che la serie ea termini strettamente positivi . Per tali serie e possibile stabilire diversicriteri di convergenza, la cui validita puo essere estesa alle serie a terminidefinitivamente positivi per le quali la condizione an ≥ 0 e verificata perogni n ≥ ν, con ν ∈ N opportuno ed anche, con ovvie modifiche, alle serienegative oppure definitivamente negative.
Inoltre conviene tenere presente che una serie a termini positivi puo es-sere sempre ricondotta ad una serie a termini strettamente positivi trascu-rando i termini uguali a 0. Pertanto non sara restrittivo all’occorrenza sup-porre che la serie sia a termini strettamente positivi anziche semplicementepositivi.
Una proprieta rilevante delle serie a termini positivi e il fatto che lasuccessione delle somme parziali risulta crescente e pertanto essa potra es-sere convergente (se le somme parziali sono limitate superiormente) oppuredivergente positivamente (se le somme parziali non sono limitate superior-mente). In tema di notazioni, per indicare che una serie
∑+∞n=0 an a termini
positivi e convergente, si scrive spesso
+∞∑
n=0
an < +∞ .
Da quanto osservato segue anche che una serie indeterminata deve ave-re necessariamente infiniti termini strettamente positivi ed infiniti terministrettamente negativi.

184 Capitolo 7: Successioni e serie numeriche
Un primo criterio elementare di confronto si puo ricavare direttamentedai teoremi di confronto per i limiti.
Proposizione 7.2.5 (Primo criterio di confronto per le serie a ter-mini positivi)Si considerino due serie
∑+∞n=0 an e
∑+∞n=0 bn a termini positivi e si supponga
che esista ν ∈ N tale che, per ogni n ≥ ν, risulti an ≤ bn. Allora
1) Se la serie∑+∞
n=0 bn e convergente, lo e anche la serie∑+∞
n=0 an erisulta
+∞∑
n=0
an ≤+∞∑
n=0
bn .
2) Se la serie∑+∞
n=0 an e divergente positivamente, lo e anche la serie∑+∞n=0 bn.
Il criterio precedente puo essere applicato nel caso seguente.
Corollario 7.2.6 (Secondo criterio di confronto per le serie a termini positivi)Si considerino due serie
∑+∞n=0 an e
∑+∞n=0 bn a termini strettamente positivi e si sup-
ponga che esista il limite limn→+∞ an/bn = ℓ. Allora
1) Se 0 < ℓ < +∞, le due serie hanno lo stesso carattere.
2) Se ℓ = 0 e se la serie∑+∞
n=0 bn e convergente, anche la serie∑+∞
n=0 an e con-
vergente. Se invece la serie∑+∞
n=0 an e divergente positivamente, anche la serie∑+∞n=0 bn e divergente positivamente.
3) Se ℓ = +∞ e se la serie∑+∞
n=0 an e convergente, anche la serie∑+∞
n=0 bn converge,
mentre se la serie∑+∞
n=0 bn e divergente positivamente anche la serie∑+∞
n=0 an edivergente positivamente.
Dimostrazione. 1) Dalla definizione di limite, esiste ν ∈ N tale che ℓ/2 < an/bn < 3ℓ/2per ogni n ≥ ν, da cui
ℓ
2bn < an <
3ℓ
2bn .
Applicando il primo criterio di confronto (Proposizione 7.2.5) tenendo conto di entrambele diseguaglianze, si deduce che le due serie hanno lo stesso carattere.2) Dalla definizione di limite, esiste ν ∈ N tale che −1 < an/bn < 1 per ogni n ≥ ν, dacui, in particolare, an < bn. Allora, dalla Proposizione 7.2.5, segue interamente la tesi.
3) Basta applicare il caso 2) invertendo i ruoli delle due serie e tenendo presente che, nel
caso in esame, limn→+∞ bn/an = 0. #
A questo punto si possono enunciare i criteri di convergenza maggior-mente utilizzati nelle applicazioni.
Teorema 7.2.7 (Criterio del rapporto di D’Alembert per le seriea termini positivi)
Sia+∞∑
n=0
an una serie a termini strettamente positivi. Allora

7.2 Serie numeriche 185
1) Se lim supn→+∞
an+1
an< 1, allora la serie
+∞∑
n=0
an e convergente.
2) Se la successione
(an+1
an
)
n∈Ne definitivamente maggiore o uguale di
1, allora la serie+∞∑
n=0
an e divergente positivamente.
Dimostrazione. 1) Si ponga ℓ′′ := lim supn→+∞
an+1
an; poiche ℓ′′ < 1, si puo considerare ℓ′′ <
q < 1 e dalla prima proprieta caratteristica del massimo limite (applicata con ε := q−ℓ′′)esiste ν ∈ N tali che, per ogni n ≥ ν, an+1/an < q, da cui an+1 < qan. Si riconosce orache, per ogni n ≥ ν, risulta an ≤ qn−νaν ; infatti, tale proprieta e ovviamente vera pern = ν e, supposta vera per un certo n ≥ ν, si ha an+1 < q · qn−νaν = qn+1−νaν . Poiche0 < q < 1, la serie geometrica
∑+∞n=0 q
n e convergente e quindi, per la Proposizione 7.2.5,
lo e anche la serie∑+∞
n=0 an.
2) Dalle ipotesi fatte, segue che la successione (an)n∈N e definitivamente crescente e
quindi, essendo a termini positivi, essa non puo essere infinitesima. Dalla Proposizione
7.2.1, segue che la serie∑+∞
n=0 an non e convergente e quindi essa deve essere divergente
positivamente. #
Si supponga che esista il limn→+∞
an+1
ane lo si denoti con ℓ. Allora, la
serie∑+∞
n=0 an e convergente se ℓ < 1 (in tal caso infatti ℓ′′ = ℓ < 1) ed edivergente positivamente se ℓ > 1 (in tal caso, infatti, si ha an+1/an > 1definitivamente); se ℓ = 1, non si puo invece dire nulla.
Ad esempio, si consideri la serie
+∞∑
n=0
an
n!, a ∈ R .
Per ogni n ∈ N, posto an := an/n!, risulta
an+1
an=
an+1
(n+ 1)!
n!
an=
a
n+ 1
e quindi limn→+∞ an+1/an = 0. Dal Teorema 7.2.7 segue allora che la seriee convergente per ogni a ∈ R.
Teorema 7.2.8 (Criterio della radice di Cauchy per le serie a ter-mini positivi)Sia (an)n∈N una successione di numeri reali positivi. Allora:
1) Se lim supn→+∞
n√an < 1, la serie
∑+∞n=0 an e convergente.

186 Capitolo 7: Successioni e serie numeriche
2) Se lim supn→+∞
n√an > 1, la serie
∑+∞n=0 an e divergente positivamente.
Dimostrazione. 1) Si ponga ℓ′′ := lim supn→+∞n√an e si consideri q ∈ R tale che
ℓ′′ < q < 1; dalla prima proprieta caratteristica del massimo limite, esiste ν ∈ N tale che,per ogni n ≥ ν, si abbia n
√an < q, e quindi an < qn. Poiche q < 1, la serie geometrica∑+∞
n=0 qn e convergente e quindi, per il primo criterio di confronto (Proposizione 7.2.5),
anche la serie∑+∞
n=0 an e convergente.
2) Dalla seconda proprieta caratteristica del massimo limite applicata con ε = ℓ′′ − 1,
segue che l’insieme n ∈ N | an > 1 e infinito e quindi la successione (an)n∈N non puo
essere infinitesima. Dalla Proposizione 7.2.1 segue che la serie∑+∞
n=0 an non puo essere
convergente e pertanto essa e necessariamente divergente positivamente. #
Ovviamente, anche in questo caso se esiste il limite limn→+∞ n√an = ℓ,
la serie e convergente se ℓ < 1 ed e divergente positivamente se ℓ > 1, mentrenon si puo dire nulla nel caso ℓ = 1.
Ad esempio, si consideri la serie∑+∞
n=0 an, dove
an =
2−n , n pari;3−n , n dispari.
Si ha lim supn→+∞n√an = max1/2, 1/3 = 1/2 e quindi dal Teorema 7.2.8,
la serie e convergente. Si osservi che il criterio del rapporto in questo casonon e applicabile.
Si enuncia ora un ulteriore criterio generale di convergenza.
Teorema 7.2.9 (Criterio di Raabe-Duhamel per le serie a terminipositivi)Sia (an)n∈N una successione di numeri reali strettamente positivi. Si haquanto segue:
1) Se esistono q > 1 e ν ∈ N tali che, per ogni n ≥ ν, si abbia
n
(an
an+1− 1
)≥ q ,
allora la serie∑+∞
n=0 an e convergente.
2) Se esiste ν ∈ N tale che, per ogni n ≥ ν, si abbia
n
(an
an+1− 1
)≤ 1 ,
allora la serie∑+∞
n=0 an e divergente positivamente.

7.2 Serie numeriche 187
Dimostrazione. 1) Per ogni n ≥ ν, si ha q ·an+1−an+1 ≤ n(an−an+1)−an+1 e quindi
an+1 ≤nan − (n+ 1)an+1
q − 1.
Denotata con sn la somma parziale n-esima della serie∑+∞
n=0 an, da quest’ultima rela-zione segue, per ogni n ≥ ν,
sn+1 = sν + aν+1 + · · ·+ an+1
≤ sν +νaν − (ν + 1)aν+1
q − 1+ · · ·+
nan − (n+ 1)an+1
q − 1
= sν +νaνq − 1
−(n+ 1)an+1
q − 1
≤ sν +νaνq − 1
.
Quindi le somme parziali della serie in esame sono limitate superiormente da cui laconvergenza della serie
2) Dalle ipotesi segue, per ogni n ≥ ν, nan ≤ (n + 1)an+1 e quindi, in particolare,
νaν ≤ (n + 1)an+1; allora, per ogni n ≥ ν, si ha an+1 ≥ νaν/(n + 1); poiche la serie
armonica∑+∞
n=0 1/(n + 1) e divergente positivamente, si conclude che anche la serie in
esame e divergente positivamente. #
Anche ora l’esistenza del limite
limn→+∞
n
(an
an+1− 1
)= ℓ ,
consente di affermare la convergenza della serie∑+∞
n=0 an nel caso ℓ > 1 e lasua divergenza positiva nel caso ℓ < 1, mentre il caso ℓ = 1 non consente didire nulla.
Esempio 7.2.10 (Serie armonica generalizzata)Si consideri la serie
+∞∑
n=0
1
(n+ 1)p
con p ∈]0,+∞[, la quale viene denominata serie armonica generalizzata diordine p (o semplicemente serie armonica se p = 1).
Poiche
limn→+∞
n
(1/(n+ 1)p
1/(n+ 2)p− 1
)= lim
n→+∞n
((n+ 2)p
(n+ 1)p− 1
)
= limn→+∞
n
((1 +
1
n+ 1
)p
− 1
)
= limn→+∞
n
n+ 1
(1 + 1/(n+ 1))p − 1
1/(n+ 1)= p ,

188 Capitolo 7: Successioni e serie numeriche
applicando il criterio di Raabe-Duhamel, si riconosce che la serie armonicageneralizzata e convergente se p > 1 ed e divergente positivamente se p < 1;nel caso p = 1, si e gia riconosciuto direttamente che essa risulta ancoradivergente positivamente. Si osservi che a tale serie non era applicabile neil criterio del rapporto ne quello della radice.
Nel caso di successioni decrescenti, vi e un ulteriore strumento moltoutile nelle applicazioni.
Teorema 7.2.11 (Criterio di condensazione di Cauchy per le seriea termini positivi)Sia (an)n∈N una successione decrescente di numeri reali positivi.
Allora le due serie
+∞∑
n=0
an ,+∞∑
n=0
2n a2n ,
sono entrambe convergenti oppure entrambe divergenti positivamente.
Dimostrazione. Si indichi con sn la somma parziale n-esima della serie∑+∞
n=0 an e con
σn quella della serie∑+∞
n=0 2n a2n .
Per ogni k ∈ N, si ha2k+1−1∑
j=2k
aj ≤ 2k a2k ,
in quanto il primo membro e somma di 2k addendi ognuno dei quali e minore o ugualeal primo addendo a2k (a causa della decrescenza della successione (an)n∈N). Sommandoper k = 0, . . . , n si ha
s2n+1−1 =2n+1−1∑
k=1
ak =n∑
k=0
2k+1−1∑
j=2k
aj ≤n∑
k=0
2k a2k = σn ,
e quindi la convergenza della seconda serie implica quella della prima.Viceversa, procedendo in maniera analoga, per ogni k ≥ 1,
1
22ka2k = 2k−1a2k ≤
2k∑
j=2k−1+1
aj
(il numero degli addendi a secondo e infatti 2k − 2k−1 − 1 + 1 = 2 · 2k−1 − 2k−1 = 2k−1
ed ognuno di essi e maggiore o uguale di quello con l’indice maggiore, cioe a2k ) e quindi,sommando per k = 1, . . . , n,
1
2(σn − a1) =
1
2
(n∑
k=1
2ka2k + a1 − a1
)=
1
2
n∑
k=1
2ka2k ≤2n∑
k=2
ak = s2n − a0 − a1 ;
da cio segue che la convergenza della prima serie implica quella della seconda. #
7.2 Serie numeriche 189
Ad esempio, si consideri la serie
+∞∑
n=2
1
n | log n|p , p ∈]0,+∞[ .
Posto an := 1/(n | log n|p), si ha
2na2n = 2n1
2n | log 2n|p =1
np | log 2|p
e inoltre la successione (an)n≥2 e decrescente. Poiche la serie armonicageneralizzata e convergente per p > 1 e divergente positivamente per p ≤ 1,dal Teorema 7.2.11, segue che la serie in esame si comporta allo stesso modo.
Nelle applicazioni i criteri precedenti possono essere utilizzati anche perserie che non hanno segno costante, riferendoli alla serie dei valori assoluti,che e in ogni caso a termini positivi.
Infatti, se (an)n∈N e una successione arbitraria di numeri reali, si puoconsiderare la serie
+∞∑
n=0
|an|
di termine generale n-esimo |an|; tale serie e a termini positivi e quindi deveessere o convergente o divergente positivamente.
Si dice che la serie∑+∞
n=0 an e assolutamente convergente (rispettivamen-
te, assolutamente divergente) se la serie∑+∞
n=0 |an| e convergente (rispetti-vamente, divergente positivamente).
La condizione di assoluta convergenza e piu restrittiva della convergenzadi una serie, come si riconosce nella proposizione successiva.
Proposizione 7.2.12 Sia (an)n∈N una successione di numeri reali. Se laserie
∑+∞n=0 an e assolutamente convergente, allora essa e anche convergen-
te.
Dimostrazione. Sia ε > 0; dal criterio di convergenza di Cauchy applicato alla serie∑+∞n=0 |an|, esiste ν ∈ N tale che, per ogni n ≥ ν e per ogni p ∈ N, risulti
n+p∑
k=n+1
|ak| < ε .
Allora si ha anche ∣∣∣∣∣∣
n+p∑
k=n+1
ak
∣∣∣∣∣∣≤
n+p∑
k=n+1
|ak| < ε ,
e quindi, sempre dal criterio di convergenza di Cauchy segue che la serie∑+∞
n=0 an e
convergente. #

190 Capitolo 7: Successioni e serie numeriche
Viceversa, una serie puo essere convergente senza essere assolutamenteconvergente; in tal caso si dice anche che la serie e semplicemente conver-gente (oppure semiconvergente).
Se la serie dei valori assoluti di una serie assegnata verifica qualcunodei criteri di convergenza precedenti, la serie risultera assolutamente con-vergente e quindi, dalla Proposizione 7.2.12, risultera a maggior ragioneconvergente.
Invece, il fatto che una serie sia assolutamente divergente non comportache essa non possa essere convergente.
Un ulteriore criterio di convergenza assoluta si ottiene applicando laProposizione 7.2.5 alla serie armonica generalizzata.
Teorema 7.2.13 (Criterio dell’ordine di infinitesimo per le serie)Sia
∑+∞n=0 an una serie arbitraria di numeri reali. Allora
1) Se la successione (an)n∈N e un infinitesimo di ordine maggiore ouguale di α, con α > 1, la serie
∑+∞n=0 an e assolutamente convergente.
2) Se la successione (an)n∈N e un infinitesimo di ordine minore o ugualedi 1, la serie
∑+∞n=0 an e assolutamente divergente.
Dimostrazione. 1) Poiche la successione (an)n∈N e un infinitesimo di ordine maggioreo uguale di α, con α > 1, si ha limn→+∞ nα|an| = ℓ con ℓ ∈ R (eventualmente, puoanche accadere ℓ = 0). Dalla definizione di limite si ottiene l’esistenza di ν ∈ N taleche, per ogni n ≥ ν, risulti nα|an| ≤ ℓ + 1, da cui |an| ≤ (ℓ + 1)/nα. Poiche la serie(ℓ + 1)
∑+∞n=0 1/n
α e convergente (si veda l’Esempio 7.2.10), dalla Proposizione 7.2.5
segue che anche la serie∑+∞
n=0 |an| e convergente.
2) Poiche la successione (an)n∈N e un infinitesimo di ordine minore o uguale di 1, si ha
limn→+∞ n|an| = ℓ con ℓ > 0 oppure ℓ = +∞ (se l’ordine di infinitesimo e minore di
1). Dalla definizione di limite, considerato β > 0 tale che β < ℓ, esiste ν ∈ N tale che,
per ogni n ≥ ν, si abbia n|an| ≥ β, da cui |an| ≥ β/n. La serie∑+∞
n=1 β/n e divergente
positivamente (Esempio 7.2.4) e quindi, dalla Proposizione 7.2.5, anche la serie∑+∞
n=0 |an|e divergente positivamente. #
7.2.3 Serie alternanti
Si studia ora un ulteriore criterio di convergenza per serie che non sono atermini positivi.
Sia (an)n∈N una successione di numeri reali positivi (oppure negativi).Allora la serie
∑+∞n=0(−1)n an viene denominata a segni alterni (oppure
alternante). Si ha il seguente criterio di convergenza.
Teorema 7.2.14 (Criterio di Leibnitz per le serie alternanti)Sia (an)n∈N una successione decrescente ed infinitesima di numeri reali po-sitivi. Allora, la serie alternante
∑+∞n=0(−1)nan e convergente e inoltre,

7.2 Serie numeriche 191
denotata con s la sua somma e, per ogni n ∈ N, con sn la somma parzialen-esima, si ha
|s− sn| ≤ an+1 . (7.2.1)
Dimostrazione. Tenendo presente che la successione (an)n∈N e decrescente, valgono lerelazioni
s2(n+1) = s2n − a2n+1 + a2n+2 ≤ s2n , (1)
s2(n+1)+1 = s2n+1 − a2n+2 + a2n+3 ≥ s2n+1 , (2)
s2n − s2n+1 = a2n+1 . (3)
Dalle uguaglianze (1) e (2) segue che la successione estratta (s2n)n∈N e decrescente,mentre la successione estratta (s2n+1)n∈N e crescente; inoltre, dalla (3), s2n+1 ≤ s2n perogni n ∈ N e quindi s1 ≤ s2n e s2n+1 ≤ s0. Dunque, le successioni (s2n)n∈N e (s2n+1)n∈Nsono monotone e limitate e quindi, dal Teorema 7.1.2, esse sono convergenti. Postos = limn→+∞ s2n e tenendo presente che la successione (an)n∈N e infinitesima, si haanche limn→+∞ s2n+1 = limn→+∞ s2n−a2n+1 = limn→+∞ s2n− limn→+∞ a2n+1 = s.Infine, dalla monotonia delle successioni (s2n)n∈N e (s2n+1)n∈N e dalla (3) segue, perogni n ∈ N,
|s− s2n| = s2n − s ≤ s2n − s2n+1 = a2n+1 ,
|s− s2n+1| = s− s2n+1 ≤ s2n+2 − s2n+1 = a2n+2 ;
quindi sia nel caso in cui n sia pari o dispari si ha |s − sn| ≤ an+1; da cio segue che la
successione (sn)n∈N delle somme parziali converge verso s e vale la (7.2.1). #
La (7.2.1) si puo enunciare dicendo che l’errore commesso approssimandola somma di una serie a termini alterni con una somma parziale e minore ouguale del valore assoluto del primo termine trascurato.
Esempio 7.2.15 (Serie armonica a segni alterni)Si consideri la serie
+∞∑
n=0
(−1)n 1
(n+ 1)p,
con p ∈]0,+∞[, la quale viene denominata serie armonica a segni alternidi ordine p; se p = 1, essa viene denominata semplicemente serie armonicaa segni alterni.
Si e gia visto che tale serie e assolutamente convergente (e quindi conver-gente per la Proposizione 7.2.12) se p > 1. Se p ≤ 1, si puo tener presenteche la successione (n−p)n≥1 e decrescente ed infinitesima e quindi per il cri-terio di Leibnitz la serie risulta ancora convergente (ma non assolutamente).Infine, denotata con s la somma della serie, per ogni n ≥ 1, dalla (7.2.1)segue ∣∣∣∣∣s−
n∑
k=0
(−1)k 1
(k + 1)p
∣∣∣∣∣ ≤1
(n+ 2)p.

192 Capitolo 7: Successioni e serie numeriche
7.2.4 Proprieta algebriche
Alcune proprieta algebriche elementari delle serie numeriche sono state giaconsiderate in precedenza. Si esamina ora il comportamento delle serienumeriche rispetto ad ulteriori operazioni algebriche.
La prima operazione che si prende in considerazione e quella di prodottosecondo Cauchy di due serie numeriche.
Siano∑+∞
n=0 an e∑+∞
n=0 bn due serie numeriche di numeri reali. Sidefinisce serie prodotto secondo Cauchy delle due serie, e si denota con
+∞∑
n=0
an ·+∞∑
n=0
bn ,
la serie∑+∞
n=0 cn di termine n-esimo
cn :=n∑
k=0
akbn−k . (7.2.2)
Il termine n-esimo della serie prodotto secondo Cauchy si ottiene som-mando i prodotti dei termini delle due serie la cui somma degli indici euguale ad n. Nel diagramma seguente, che conviene tener presente per lediseguaglianze utilizzate nella proposizione successiva, i termini della se-rie prodotto si ottengono sommando gli elementi delle diagonali. Quindila somma parziale n-esima della serie prodotto secondo Cauchy si ottie-ne sommando tutti gli elementi che si trovano al di sotto della diagonalen-esima.
Proposizione 7.2.16 Siano∑+∞
n=0 an e∑+∞
n=0 bn due serie assolutamen-te convergenti di numeri reali. Allora la serie prodotto secondo Cauchy∑+∞
n=0 cn definita dalla (7.2.2) e assolutamente convergente.
Inoltre, posto s :=∑+∞
n=0 an, t :=∑+∞
n=0 bn e u :=∑+∞
n=0 cn, risultau = s · t.
Dimostrazione. Si supponga dapprima che le serie∑+∞
n=0 an e∑+∞
n=0 bn siano a termini
positivi e, per ogni n ∈ N, si denoti con sn la somma parziale n-esima della serie∑+∞
n=0 an,
con tn la somma parziale n-esima della serie∑+∞
n=0 bn ed infine con un la somma parziale
n-esima della serie∑+∞
n=0 cn. Allora, per ogni n ∈ N, si ha
un = a0b0 + (a0b1 + a1b0) + · · ·+ (a0bn + a1bn−1 + · · ·+ an−1b1 + anb0)
≤ a0(b0 + · · ·+ bn) + · · ·+ an(b0 + · · ·+ bn)
= (a0 + · · ·+ an)(b0 + · · ·+ bn)
= sntn
≤ a0b0 + (a0b1 + a1b0) + · · ·+ (a0b2n + a1b2n−1 + · · ·+ a2n−1b1 + a2nb0)
= u2n .
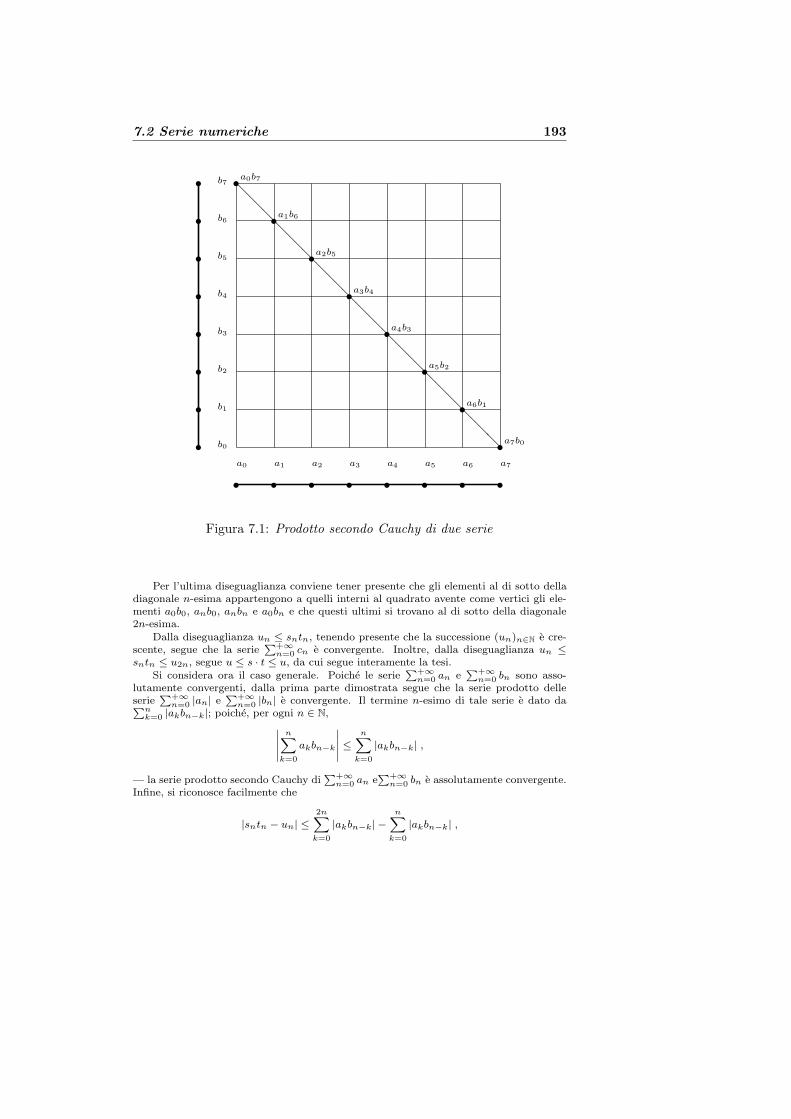
7.2 Serie numeriche 193
a0 a1 a2 a3 a4 a5 a6 a7
b0
b1
b2
b3
b4
b5
b6
b7a0b7
a1b6
a2b5
a3b4
a4b3
a5b2
a6b1
a7b0•
•
•
•
•
•
•
•
• • • • • • • •
•
•
•
•
•
•
•
•
Figura 7.1: Prodotto secondo Cauchy di due serie
Per l’ultima diseguaglianza conviene tener presente che gli elementi al di sotto delladiagonale n-esima appartengono a quelli interni al quadrato avente come vertici gli ele-menti a0b0, anb0, anbn e a0bn e che questi ultimi si trovano al di sotto della diagonale2n-esima.
Dalla diseguaglianza un ≤ sntn, tenendo presente che la successione (un)n∈N e cre-scente, segue che la serie
∑+∞n=0 cn e convergente. Inoltre, dalla diseguaglianza un ≤
sntn ≤ u2n, segue u ≤ s · t ≤ u, da cui segue interamente la tesi.Si considera ora il caso generale. Poiche le serie
∑+∞n=0 an e
∑+∞n=0 bn sono asso-
lutamente convergenti, dalla prima parte dimostrata segue che la serie prodotto delleserie
∑+∞n=0 |an| e
∑+∞n=0 |bn| e convergente. Il termine n-esimo di tale serie e dato da∑n
k=0 |akbn−k|; poiche, per ogni n ∈ N,∣∣∣∣∣
n∑
k=0
akbn−k
∣∣∣∣∣ ≤n∑
k=0
|akbn−k| ,
— la serie prodotto secondo Cauchy di∑+∞
n=0 an e∑+∞
n=0 bn e assolutamente convergente.Infine, si riconosce facilmente che
|sntn − un| ≤2n∑
k=0
|akbn−k|−n∑
k=0
|akbn−k| ,

194 Capitolo 7: Successioni e serie numeriche
e quindi, passando al limite per n → +∞, si ha limn→+∞ |sntn−un| = 0, da cui u = s ·t.t #
Si potrebbe riconoscere, ma si omette per brevita la dimostrazione, chela serie prodotto secondo Cauchy converge anche se una sola delle due seriee assolutamente convergente e l’altra e convergente (Teorema di Mertens).Inoltre, se due serie sono convergenti, la serie prodotto secondo Cauchynon puo risultare divergente positivamente ne divergente negativamente,ma deve essere necessariamente convergente oppure indeterminata. Nel casoin cui la serie prodotto secondo Cauchy sia convergente, vale in ogni casol’uguaglianza con il prodotto delle somme delle due serie.
Si e gia osservato che l’alterazione di un numero finito di termini di unaserie non influisce sul suo carattere. Si esaminano ora alcune proprieta delleserie che riguardano invece l’alterazione di un numero non necessariamentefinito di termini. Per brevita, si omettono le dimostrazioni delle proprietasuccessive.
Se∑+∞
n=0 an e una serie di numeri reali e se (k(n))n∈N e una successionestrettamente crescente di interi positivi tale che k(0) = 0, la serie
+∞∑
n=0
⎛
⎝k(n+1)−1∑
j=k(n)
aj
⎞
⎠
di termine n-esimo∑k(n+1)−1
j=k(n) aj si dice ottenuta dalla serie∑+∞
n=0 an rag-gruppandone i termini.
La proprieta di completa additivita delle serie convergenti asserisce chese la serie
∑+∞n=0 an e convergente (rispettivamente, divergente positivamen-
te, divergente negativamente, assolutamente convergente, assolutamente di-vergente), allora anche le serie ottenute da essa raggruppandone i terminisono convergenti (rispettivamente, divergenti positivamente, divergenti ne-gativamente, assolutamente convergenti, assolutamente divergenti) e le lorosomme coincidono.
Conviene osservare che una serie ottenuta raggruppando i termini puoessere convergente senza che lo sia la serie di partenza. In particolare,se una serie e indeterminata, non e detto che una serie ottenuta da essaraggruppandone i termini sia anch’essa indeterminata. Ad esempio, la serie∑+∞
n=0(−1)n e indeterminata in quanto il termine n-esimo non e infinitesimo,ma se si considera la successione (2n)n∈N strettamente crescente di interi siottiene una serie con tutti i termini nulli che quindi converge a 0.
Si considera infine una estensione della proprieta commutativa dellasomma di numeri reali. Se
∑+∞n=0 an e una serie di numeri reali e se σ :
7.2 Serie numeriche 195
N → N e una permutazione dell’insieme N (cioe, una funzione bigettiva diN in N), allora la serie
∑+∞n=0 aσ(n) di termine n-esimo aσ(n) si dice ottenuta
dalla serie∑+∞
n=0 an riordinandone i termini. Inoltre, si dice che la serie∑+∞n=0 an e incondizionatamente convergente se ogni serie da essa ottenuta
riordinandone i termini e convergente e si ha
+∞∑
n=0
aσ(n) =+∞∑
n=0
an .
Si puo riconoscere che una serie e incondizionatamente convergente se esolo se essa e assolutamente convergente.

Capitolo 8
Funzioni continue
Una delle proprieta piu importanti delle funzioni elementari riguarda il fat-to che il limite in un punto x0 in cui la funzione e definita si puo deter-minare semplicemente calcolando la funzione in x0. Tale proprieta vieneapprofondita nel presente capitolo.
8.1 Definizioni e proprieta preliminari
Definizione 8.1.1 Siano X un sottoinsieme non vuoto di R, x0 ∈ X edf : X → R una funzione reale. Si dice che f e continua in x0 se verifica laseguente condizione
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ X∩]x0 − δ, x0 + δ[: |f(x)− f(x0)| < ε .
Se x0 ∈ X non e un punto di accumulazione per X, la condizione pre-cedente e sempre soddisfatta (basta considerare δ > 0 tale che X∩]x0 −δ, x0 + δ["x0 = ∅), mentre se x0 e di accumulazione per X, la condizioneprecedente equivale all’esistenza del limite di f in x0 ed alla condizione
limx→x0
f(x) = f(x0) .
Se A e un sottoinsieme diX, si dice che f e continua in A se f e continuain ogni x0 ∈ A. Infine, si dice che f e continua, se essa e continua in X.
In modo analogo si forniscono le definizioni di funzione continua a si-nistra e continua a destra; precisamente, si dice che f e continua a destra(rispettivamente, continua a sinistra) in x0 se verifica la seguente condizione
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ X ∩ [x0, x0 + δ[: |f(x)− f(x0)| < ε

198 Capitolo 8: Funzioni continue
(rispettivamente,
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ X∩]x0 − δ, x0] : |f(x)− f(x0)| < ε ).
Si riconosce facilmente che se x0 e un punto di accumulazione a destra(rispettivamente, a sinistra) per X, allora f e continua a destra (rispettiva-mente, a sinistra) in x0 se e solo se esiste il limite destro (rispettivamente,sinistro) di f in x0 e si ha
limx→x+
0
f(x) = f(x0) (rispettivamente, limx→x−
0
f(x) = f(x0) ).
Ad esempio, la funzione f :] − 1,+∞[→ R definita ponendo, per ognix ∈]− 1,+∞[,
f(x) :=
log(1 + x)
x, x = 0
1 , x = 0 ,
e continua nel punto x0 = 0.
Invece, la funzione f : R→ R definita ponendo, per ogni x ∈ R,
f(x) :=
e1/x , x = 00 , x = 0 ,
e continua a sinistra in x0 = 0, ma non a destra in quanto limx→0+ e1/x =+∞.
Un punto in cui una funzione f : X → R e definita ma non e continua,viene denominato punto di discontinuita per f . Si osservi che un punto didiscontinuita x0 ∈ X deve essere necessariamente di accumulazione per Xe quindi in un tale punto si puo considerare il limite di f ma, se esiste, nondeve coincidere con f(x0). A seconda del comportamento di tale limite, sipossono classificare diversi tipi di punti di discontinuita di seguito specificati.
Siano X un sottoinsieme non vuoto di R, f : X → R una funzione realeed x0 ∈ X un punto di discontinuita per f .
1) Si dice che x0 e un punto di discontinuita eliminabile per f se esisteed e finito il limx→x0 f(x) e si ha
limx→x0
f(x) = f(x0) .
2) Si dice che x0 e un punto di discontinuita di prima specie per f seesistono e sono finiti il limite sinistro limx→x−
0f(x) ed il limite destro
limx→x+0f(x) e si ha
limx→x−
0
f(x) = limx→x+
0
f(x) .

8.1 Definizioni e proprieta preliminari 199
3) In tutti i casi rimanenti, cioe se uno dei due limiti da sinistra oda destra non esiste oppure e infinito, si dice che x0 e un punto didiscontinuita di seconda specie.
Se x0 e un punto di discontinuita eliminabile per f , si puo definire lafunzione f : X → R ponendo, per ogni x ∈ X,
f(x) :=
f(x) , x = x0 ,lim
x→x0
f(x) , x = x0 ,
la quale risulta continua in x0; cio giustifica la denominazione data a questotipo di discontinuita.
np Se x0 ∈ X e un punto di discontinuita di prima specie, esso e necessa-riamente di accumulazione sia a sinistra che a destra per X e non e possibileridefinire la funzione nel punto x0 in modo da ottenere una funzione con-tinua. Si possono tuttavia definire le funzioni f− : X → R e f+ : X → Rponendo, per ogni x ∈ X,
f−(x) :=
f(x) , x = x0 ,lim
x→x−0
f(x) , x = x0 , f+(x) :=
f(x) , x = x0 ,lim
x→x+0
f(x) , x = x0 ,
le quali sono la prima continua solamente a sinistra in x0 e la secondacontinua solamente a destra in x0.
Il numero reale
s(x0) := limx→x+
0
f(x)− limx→x−
0
f(x)
viene denominato salto della funzione f nel punto x0.
Ad esempio, la funzione segno sign : R→ R definita ponendo, per ognix ∈ R,
sign(x) :=
|x|/x , x = 0 ,0 , x = 0 ,
ha una discontinuita di prima specie nel punto 0 ed il salto della funzionenel punto 0 e uguale a 2.
Un noto esempio di funzione che presenta discontinuita di seconda speciein ogni punto del suo insieme di definizione e la funzione di Dirichlet d :[0, 1]→ R definita ponendo, per ogni x ∈ [0, 1],
d(x) :=
1 , x ∈ [0, 1] ∩Q ,0 , x ∈ [0, 1] ∩ (R"Q) .
(8.1.1)
Dai teoremi sui limiti, segue subito il seguente risultato riguardante leoperazioni sulle funzioni continue.

200 Capitolo 8: Funzioni continue
Teorema 8.1.2 Siano X un sottoinsieme non vuoto di R, x0 ∈ X un puntodi accumulazione per X ed f : X → R e g : X → R funzioni reali. Allora:
1) Se f e g sono continue in x0, anche la funzione somma f+g e continuain x0; conseguentemente, se f e g sono continue, f + g e continua.
2) Se f e g sono continue in x0, anche la funzione prodotto f ·g e continuain x0; conseguentemente, se f e g sono continue, f · g e continua.
In particolare, se λ ∈ R ed f e continua in x0, anche la funzione λ · fe continua in x0; conseguentemente, se f e continua, λ ·f e anch’essacontinua.
3) Se, per ogni x ∈ X, f(x) = 0 ed f e continua in x0, anche la funzionereciproca 1/f e continua in x0; conseguentemente, se f e continua,anche 1/f e continua.
4) Se, per ogni x ∈ X, g(x) = 0 ed f e g sono continue in x0, anche lafunzione quoziente f/g e continua in x0; conseguentemente, se f e gsono continue, f/g e continua.
Teorema 8.1.3 (Continuita delle funzioni composte)Siano X e Y sottoinsiemi non vuoti di R, x0 ∈ X un punto di accumulazioneper X ed f : X → R e g : Y → R funzioni reali tali che f(X) ⊂ Y e siponga y0 = f(x0). Se f e continua in x0 e g e continua in y0, allora lafunzione composta gf : X → R risulta continua in x0. Conseguentemente,se f e g sono continue, la funzione composta g f e continua.
Dimostrazione. La dimostrazione puo essere considerata una conseguenza del Teorema
6.5.6 sul limite delle funzioni composte, tuttavia si puo fonire facilmente una dimostra-
zione diretta. Fissato ε > 0, dalla continuita di g in y0 segue l’esistenza di δ1 > 0 tale
che, per ogni y ∈ Y ∩]y0 − δ1, y0 + δ1[, si abbia g(y0) − ε < g(y) < g(y0) + ε; inoltre,
poiche f e continua in x0, si puo trovare δ > 0 tale che, per ogni x ∈ X∩]x0 − δ, x0 + δ[,
risulti f(x0) − δ1 < f(x) < f(x0) + δ1. Allora, per ogni x ∈ X∩]x0 − δ, x0 + δ[, si ha
anche f(x) ∈ Y ∩]y0 − δ1, y0 + δ1[ e conseguentemente g(y0) − ε < g(f(x)) < g(y0) + ε.
Dall’arbitrarieta di ε > 0 segue la tesi. #
I teoremi precedenti consentono di affermare la continuita di una fun-zione ottenuta mediante le operazioni algebriche di somma, prodotto ecomposizione di funzioni continue.
Se X e un sottoinsieme non vuoto di R, l’insieme di tutte le funzionireali continue definite in X viene denotato con C(X)
C(X) := f : X → R | f e continua .

8.2 Funzioni continue su intervalli chiusi e limitati 201
In termini algebrici, le proprieta precedenti consentono di affermare chel’insieme C(X), munito delle operazioni di somma di due funzioni e prodottodi un numero reale per una funzione, risulta uno spazio vettoriale reale.
Le funzioni maggiormente studiate nel seguito si ottengono applicandoopportune operazioni algebriche di somma, prodotto e composta alle funzio-ni elementari, per cui la continuita delle funzioni elementari sara in generalesufficiente ad assicurarne la continuita delle funzioni in esame. D’altra par-te, la continuita delle funzioni elementari e un’immediata conseguenza dellostudio dei limiti delle funzioni elementari effettuato in precedenza, in baseal quale si puo affermare che tutte le funzioni elementari sono continue.Inoltre, anche i polinomi e le funzioni razionali sono continue, in quantosomma e quoziente di funzioni continue.
8.2 Funzioni continue su intervalli chiusi e li-mitati
Alcune importanti proprieta delle funzioni continue si ottengono nel caso incui esse sono definite in intervalli chiusi e limitati.
Teorema 8.2.1 (Teorema di Weierstrass)Sia f : [a, b]→ R una funzione continua. Allora f e dotata di minimo e dimassimo, cioe esistono c ∈ [a, b] e d ∈ [a, b] tali che, per ogni x ∈ [a, b],
f(c) ≤ f(x) ≤ f(d) .
Dimostrazione. Si dimostra in una prima fase che ogni funzione continua f : [a, b] → Re limitata. Infatti, se per assurdo f non fosse limitata superiormente, essa non ammet-terebbe maggioranti e quindi, in particolare, per ogni n ∈ N esisterebbe xn ∈ [a, b] ta-le che f(xn) > n. La successione (xn)n∈N e limitata e quindi, dal Corollario 7.1.13,ammette un’estratta (xk(n))n∈N convergente verso un elemento x0 ∈ [a, b]. Poichelimn→+∞ f(xk(n)) = +∞ (in quanto f(k(n)) > k(n) ≥ n), dalla caratterizzazione se-quenziale del limite (Teorema 7.1.3) viene contraddetta la continuita di f in x0. Quindif deve essere limitata superiormente. Nello stesso modo si dimostra che f deve esserelimitata inferiormente.
Si dimostra ora che f e dotata di massimo; dalla prima parte gia dimostrata, si puo
considerare l’estremo superiore ℓ := sup f di f e quindi e sufficiente dimostrare che esso
e un valore della funzione. Infatti, dalla definizione di estremo superiore, per ogni n ∈ Nsegue l’esistenza di yn ∈ [a, b] tale che ℓ − 1/(n + 1) < f(yn) ≤ ℓ; anche in questo caso
la successione (yn)n∈N e limitata e quindi, dal Corollario 7.1.13, ammette un’estratta
(yk(n))n∈N convergente verso un elemento d ∈ [a, b]. Poiche limn→+∞ f(yk(n)) = ℓ dalla
continuita di f in y0 e dalla caratterizzazione sequenziale del limite (Teorema 7.1.3) segue
ℓ = f(d) e cio completa la dimostrazione dell’esistenza del massimo. Nello stesso modo
si dimostra infine quella del minimo di f .

202 Capitolo 8: Funzioni continue
Oltre alla continuita, si osserva che l’ipotesi che l’insieme di definizionesia un intervallo chiuso e limitato e essenziale, come si riconosce, ad esempio,considerando le restrizioni della funzioni logaritmo all’intervallo semiaperto]0, 1] ed all’intervallo non limitato [1,+∞[.
La proprieta successiva giustifica la terminologia adottata per la pro-prieta di continuita.
Teorema 8.2.2 (Teorema degli zeri)Sia f : [a, b] → R una funzione continua tale che f(a) f(b) < 0. Alloraesiste x0 ∈]a, b[ tale che f(x0) = 0.
Dimostrazione. L’ipotesi f(a) f(b) < 0 esprime il fatto che negli estremi a e b la funzionef assume valori di segno opposto. Si supponga, per fissare le notazioni, che f(a) < 0 ef(b) > 0 (la dimostrazione e analoga nel caso f(a) > 0 e f(b) < 0).
Si ponga I1 := [a, b] e si consideri il punto medio x1 ∈ [a, b]; se f(x1) = 0, latesi e vera, altrimenti la funzione f assume valori di segno opposto in almeno uno degliintervalli [a, x1] e [x1, b]; denotato con I2 tale intervallo si denota ora con x2 il puntomedio di I2 e si considera il valore f(x2). Se f(x2) = 0, la tesi e vera, altrimenti lafunzione f assume valori di segno opposto in almeno uno degli intervalli aventi comeestremi x2 ed uno dei punti considerati in precedenza; tale intervallo viene denotato I3 esi ripete il procedimento esposto. Se dopo n iterazioni di tale procedimento si trova unpunto xn ∈ [a, b] tale che f(xn) = 0, la tesi e vera, altrimenti si trova una successione diintervalli (In)n≥1 tale che, per ogni n ≥ 1, In+1 ⊂ In e In ha ampiezza (b − a)/2n−1.Per ogni n ≥ 1 si denotino con an e bn gli estremi di In e precisamente con an l’estremoin cui f assume un valore negativo e con bn l’estremo in cui f assume un valore positivo;si ottengono cosı le successioni (an)n∈N e (bn)n∈N di elementi di [a, b]. La successione(an)n∈N e limitata e quindi, dal Corollario 7.1.13, essa ammette un’estratta (ak(n))n∈Nconvergente verso un elemento x0 ∈ [a, b]. Poiche k(n) ≤ n, si ha b−a
2k(n)−1 ≤ b−a2n−1 e
conseguentemente
ak(n) −b− a
2n−1≤ ak(n) −
b− a
2k(n)−1≤ bk(n) ≤ ak(n) +
b− a
2k(n)−1≤ ak(n) −
b− a
2n−1
(in realta, bk(n) coincide con ak(n) − (b − a)/k(n) oppure con ak(n) + (b − a)/k(n)),si ha anche per confronto limn→+∞ bk(n) = x0; dalla continuita di f in x0 e dallacaratterizzazione sequenziale del limite (Teorema 7.1.3) segue
limn→+∞
f(ak(n)) = f(x0) , limn→+∞
f(bk(n)) = f(x0) ;
infine, poiche f(an) ≤ 0 deve essere anche f(x0) ≤ 0 e analogamente, poiche f(bn) ≥ 0
deve essere anche f(x0) ≥ 0; si conclude che deve essere f(x0) = 0 e cio completa la
dimostrazione.
Corollario 8.2.3 (Teorema di Bolzano o dei valori intermedi)Sia f : [a, b]→ R una funzione continua e siano m ∈ R ed M ∈ R il minimoe rispettivamente il massimo di f . Se λ ∈ R e m ≤ λ ≤ M , allora esistex0 ∈ [a, b] tale che f(x0) = λ.
Dimostrazione. Siano c ∈ [a, b] e d ∈ [a, b] tali che f(c) = m e f(d) = M . La tesi e
ovvia se λ = m oppure λ = M considerando x0 = c oppure x0 = d. Si supponga quindi

8.2 Funzioni continue su intervalli chiusi e limitati 203
x
y
x0 0a b
Figura 8.1: Teorema degli zeri.
m < λ < M e si denoti con I l’intervallo chiuso avente come estremi i punti c e d; si
consideri la funzione g : I → R definita ponendo, per ogni x ∈ I, g(x) = f(x)− λ. Allora
g e continua e inoltre g(c) g(d) < 0. Dal Teorema degli zeri 8.2.2 segue l’esistenza di
x0 ∈ I tale che g(x0) = 0; dunque x0 ∈ [a, b] e f(x0) = λ. #
Osservazione 8.2.4 (Conseguenza del teorema di Weierstrass e di Bolza-no)
Sia f : [a, b] → R una funzione continua. Dal Teorema 8.2.1 di Weier-strass, segue l’esistenza di c ∈ [a, b] e d ∈ [a, b] tali che, per ogni x ∈ [a, b],f(c) ≤ f(x) ≤ f(d), cioe f([a, b]) ⊂ [f(c), f(d)].
D’altra parte, dal teorema di Bolzano (Corollario 8.2.3), segue che ognielemento dell’intervallo [f(c), f(d)] e un valore della funzione e quindi sideve avere [f(c), f(d)] ⊂ f([a, b]). In conclusione deve essere
f([a, b]) = [f(c), f(d)] ,
cioe l’immagine di un intervallo chiuso e limitato mediante una funzionecontinua e un intervallo chiuso e limitato avente come estremi il minimo erispettivamente il massimo della funzione in tale intervallo.
Osservazione 8.2.5 Un’importante applicazione del teorema degli zeri ri-guarda la possibilita di approssimare le soluzioni di un’equazione. Sia I un

204 Capitolo 8: Funzioni continue
intervallo e sia f : I → R una funzione continua; si consideri l’equazione
f(x) = 0 .
Il primo passo consiste nel cercare due elementi a, b ∈ I tali che f(a) f(b) <0. A questo punto, applicando il metodo descritto nella dimostrazione delTeorema degli zeri 8.2.2, alla restrizione di f all’intervallo [a, b], si riesce adapprossimare una soluzione dell’equazione con la precisione desiderata.
Ad esempio, si supponga di voler determinare una soluzione dell’equa-zione
ex = −x
con una precisione pari a 3 · 10−1.
x
y
x0
0
Figura 8.2: Approssimazione delle soluzioni con il teorema degli zeri.
Confrontando i grafici delle funzioni ex e −x si riconosce facilmentel’esistenza di un’unica soluzione x0 ∈ R, che risulta negativa. Si cerca oradi applicare il ragionamento sopra esposto alla funzione f(x) = ex + x,per determinare il punto x0 con la precisione richiesta. Nel punto 0 risultaf(0) = 1 > 0, mentre nel punto −1 si ha f(−1) = e−1 − 1 < 0, da cui, peril teorema degli zeri, x0 ∈]− 1, 0[; si considera ora il punto −1/2, nel qualerisulta f(−1/2) = e−1/2 − 1/2 > 0 (in quanto e−1 > 1/4); essendo f(−1)
8.3 Continuita delle funzioni monotone 205
e f(−1/2) discordi, deve essere x0 ∈] − 1,−1/2[. Si considera ora il punto−3/4. La condizione e−3/4 > 3/4 e equivalente a 4e−3/4/3 > 1 e, elevandoalla potenza quarta entrambi i membri (tenendo presente che sono positivi)a 256/(81e3) > 1, che non e vera; quindi si ha f(−3/4) = e−3/4− 3/4 < 0 eda cio segue che la soluzione x0 deve trovarsi nell’intervallo ] − 3/4,−1/2[,agli estremi del quale la funzione assume valori di segno discorde. Essendo−1/2 − (−3/4) = 1/4 < 3 · 10−1 si e ottenuta la precisione desiderata. Siosserva tuttavia che il metodo precedente richiede in generale molti calcolise si richiede una precisione elevata e per questo motivo viene utilizzatosolamente nei casi in cui sia necessaria una stima molto approssimativadella posizione degli zeri di una funzione.
8.3 Continuita delle funzioni monotone
Ci si occupa ora di alcune proprieta particolari che riguardano la continuitadelle funzioni monotone.
Innanzitutto conviene studiare la continuita delle funzioni inverse; a talfine, e opportuno premettere alcuni risultati di interesse generale.
Conviene innanzitutto osservare che se f : X → R e una funzione realemonotona e se l’immagine f(X) di f e un intervallo, allora necessariamentef deve essere continua.
Infatti, si supponga ad esempio che f sia crescente e sia per assurdo x0 ∈ X tale
che f non sia continua in x0. Allora, tenendo presente il Teorema 6.6.1, deve risultare
limx→x−
0f(x) < f(x0) oppure f(x0) < lim
x→x+0f(x). In entrambi i casi la crescenza di
f comporta che la funzione non assuma valori nell’intervallo tra uno dei limiti ed f(x0)
e cio contraddice il fatto che f(X) e un intervallo.
Una delle poprieta generali delle funzioni strettamente monotone e quel-la di essere iniettiva. Il viceversa non vale necessariamente (ad esempio, siconsideri la funzione f : [−1, 1]→ R definita ponendo, per ogni x ∈ [−1, 1],f(x) = |x|− sign (x), dove sign e la funzione segno gia introdotta in prece-denza). tuttavia, se si suppone in piu che la funzione sia continua si ottieneil seguente risultato.
Proposizione 8.3.1 Se I e un intervallo ed f : I → R e una funzione realecontinua ed iniettiva, allora f e strettamente monotona.
Dimostrazione. Si supponga, per assurdo, che esistano x1, x2 ∈ I tali che x1 < x2 e
f(x1) ≤ f(x2) (per cui f non e strettamente decrescente) e che esistano x3, x4 ∈ I tali
che x3 < x4 e f(x3) ≥ f(x4) (per cui f non e strettamente crescente). Dunque, posto a =
minx1, x3 e b = maxx2, x4, f non risulta ne strettamente crescente ne strettamente
decrescente in [a, b]. Poiche f e iniettiva, deve essere f(a) < f(b) oppure f(b) < f(a);
si supponga f(a) < f(b). Per ogni x0 ∈]a, b[ si deve avere f(a) < f(x0) < f(b); infatti,

206 Capitolo 8: Funzioni continue
se fosse f(x0) < f(a), dal teorema di Bolzano (Corollario 8.2.3) esisterebbe un elemento
y ∈]x0, b[ tale che f(y) = f(a) ed f non sarebbe iniettiva; nello stesso modo, se fosse
f(b) < f(x0), sempre dal teorema di Bolzano esisterebbe y ∈]a, x0[ tale che f(y) = f(b)
contro l’iniettivita di f ; le uguaglianze f(x0) = f(a) e f(x0) = f(b) sono da escludere
sempre a causa dell’iniettivita di f . Si e cosı dimostrato che f e strettamente crescente in
[a, b] e cio era stato escluso. Nello stesso modo si dimostra che la condizione f(b) < f(a)
comporta la stretta decrescenza di f in [a, b], anche questa esclusa. Dunque la tesi deve
essere vera. #
Se f : X → R e iniettiva, posto Y = f(X) si e convenuto di denotarecon f−1 : Y → R la funzione inversa di f ottenuta considerando a valori intutto R l’inversa della ridotta di f . Tale funzione inversa puo ovviamenteessere considerata se f e strettamente monotona; per quanto riguarda lacontinuita della funzione f−1, si ha quanto segue.
Teorema 8.3.2 (Continuita della funzione inversa)Siano I un intervallo, f : I → R una funzione reale iniettiva e, postoY = f(I), si consideri la funzione inversa f−1 : Y → R. Se f e stretta-mente monotona, la funzione inversa f−1 e continua. In particolare, se fe continua, anche la funzione inversa f−1 e continua.
Dimostrazione. Si riconosce facilmente che la funzione inversa f−1 risulta anch’essa
strettamente monotona ed inoltre ha come immagine l’intervallo I. Da quanto osservato
preliminarmente, segue che f−1 e continua. Se si suppone che f sia continua, dalla Pro-
posizione 8.3.1 precedente, essa risulta strettamente monotona e quindi si puo applicare
quanto gia dimostrato. #
Si approfondisce ora l’analisi degli eventuali punti di discontinuita di unafunzione monotona. Si osserva innanzitutto che come conseguenza direttadel Teorema 6.6.1 sul limite delle funzioni monotone, se f : X → R e unafunzione reale monotona e se x0 ∈ X e un punto di accumulazione sia asinistra che a destra per X, allora f e continua in x0 se e solo se esiste illimite limx→x0 f(x) di f in x0.
Da cio segue che una funzione monotona f : X → R puo avere solamentediscontinuita di prima specie nei punti di accumulazione a sinistra e a destra.
Nei punti di accumulazione solamente a sinistra o solamente a destravi possono invece essere solamente discontinuita eliminabili; infatti, le di-scontinuita di seconda specie sono escluse in quanto affinche una funzionemonotona f : X → R possa essere non limitata superiormente oppure in-feriormente e necessario che X sia non limitato oppure che inf(X) /∈ Xoppure sup(X) /∈ X; in tutti questi casi la funzione f non e definita neipunti inf(X) e sup(X) e quindi in tali punti non ha senso chiedersi se lafunzione presenta in tali punti una discontinuita.

8.4 Funzioni uniformemente continue 207
Teorema 8.3.3 (Numerabilita delle discontinuita delle funzioni mo-notone)Siano X un sottoinsieme non vuoto di R ed f : X → R una funzione realemonotona. Allora l’insieme
D(f) := x0 ∈ X | f non e continua in x0
dei punti di discontinuita di f e finito oppure al piu numerabile.
Dimostrazione. Si puo supporre che f sia crescente, altrimenti basta applicare lo stessoprocedimento alla funzione −f . Per ogni x0 ∈ X, si denoti con s(x0) il salto della funzionef in x0, definito come segue
s(x0) :=
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
limx→x+
0
f(x)− limx→x−
0
f(x) , x0 di accumulazione a sinistra e a destra per X ,
limx→x+
0
f(x)− f(x0) , x0 di accumulazione solo a destra per X ,
f(x0)− limx→x−
0
f(x) , x0 di accumulazione solo a sinistra per X .
Per ogni m ∈ N, si considera inoltre l’insieme
Dm(f) :=
x0 ∈ X | s(x0) ≥
1
m+ 1
dei punti di discontinuita di f in cui il salto della funzione e maggiore o uguale di 1/(m+1).Ovviamente,
D(f) =⋃
m∈NDm(f) .
Si considerino ora una successione decrescente (an)n∈N ed una successione crescente(bn)n∈N di elementi di X tali che limn→+∞ an = inf(X) e limn→+∞ bn = sup(X).
In ogni insieme X ∩ [an, bn] la funzione e limitata in quanto e crescente ed e definitaagli estremi; segue che per ogni m ∈ N l’insieme Dn,m(f) := Dm(f)∩X∩ [an, bn] e finitoin quanto la somma di un numero finito di salti maggiori o uguali di 1/(m+ 1) non puosuperare la differenza f(bm)− f(am). Allora
D(f) =⋃
m∈NDm(f) =
⋃
m∈N
⎛
⎝⋃
n∈NDn,m(f)
⎞
⎠
e unione numerabile di insiemi finiti e pertanto e finito oppure al piu numerabile. #
8.4 Funzioni uniformemente continue
Si supponga che una funzione f : X → R sia continua; allora, per definizio-ne,
∀ x ∈ X ∀ ε > 0 ∃ δ > 0 t.c. ∀ y ∈ X∩]x− δ, x+ δ[: |f(x)− f(y)| < ε .
Pertanto, il numero reale strettamente positivo δ dipende oltre che dal nu-mero ε > 0 anche dall’elemento x ∈ X fissato. Ci si occupera ora delle

208 Capitolo 8: Funzioni continue
funzioni continue per le quali sia possibile scegliere in corrispondenza diogni ε > 0 un numero δ che soddisfi la condizione precedente per ognix ∈ X.
Precisamente, si assume la seguente definizione.
Definizione 8.4.1 Siano X un sottoinsieme non vuoto di R ed f : X → Runa funzione reale. Si dice che f e una funzione uniformemente continuase soddisfa la condizione seguente
∀ ε > 0 ∃ δ > 0 t.c. ∀ x, y ∈ X : |x−y| < δ ⇒ |f(x)−f(y)| < ε . (8.4.1)
Ovviamente, una funzione uniformemente continua risulta sempre con-tinua. Il viceversa non vale in generale.
Ad esempio, se si considera la funzione potenza f(x) = x2, x ∈ R, ladiseguaglianza |f(x)− f(y)| < ε, con ε > 0 fissato, si scrive |x2− y2| < ε ede equivalente a |(x− y)(x+ y)| < ε; se si considera y = x+ δ/2 con δ > 0,la diseguaglianza precedente diventa |δ/2 (2x + δ/2)| < ε e non puo esseresoddisfatta se x ≥ 0 e x ≥ ε/delta− δ/4. Quindi in questo caso comunquesi scelga il numero δ, la (8.4.1) non puo essere soddisfatta per ogni x, y ∈ Rtali che |x− y| < δ.
Si riconosce facilmente che la somma di due funzioni uniformementecontinue e anch’essa uniformemente continua. Se le funzioni sono limitate euniformemente continue, anche la funzione prodotto e uniformemente con-tinua. Senza l’ipotesi di limitatezza in generale non si puo affermare cheil prodotto di due funzioni uniformemente continue e uniformemente con-tinua, come accade, ad esempio, per la funzione identica f(x) = x, x ∈ R,moltiplicata per se stessa.
Nel caso in cui la funzione sia definita in un intervallo chiuso e limitato,la proprieta di uniforme continuita equivale a quella di continuita.
Teorema 8.4.2 (Teorema sull’uniforme continuita di Heine-Cantor)Se f : [a, b] → R e una funzione continua, allora f e uniformementecontinua.
Dimostrazione. Si supponga, per assurdo, che f non sia uniformemente continua. Allora,negando la condizione (8.4.1), deve esistere ε0 > 0 tale che, per ogni δ > 0, si possonotrovare x ∈ [a, b] e y ∈ [a, b] verificanti le condizioni |x − y| < δ e |f(x) − f(y)| ≥ ε0. Inparticolare, per ogni n ∈ N, applicando tale proprieta con δ = 1/(n + 1), si ottengonoan ∈ [a, b] e bn ∈ [a, b] tali che |an−bn| < 1/(n+1) e |f(an)−f(bn)| ≥ ε0. Si considerinoora le successioni (an)n∈N e (bn)n∈N di elementi di [a, b]. Esse sono limitate e quindi dalCorollario 7.1.13 esiste una successione (ak(n))n∈N estratta dalla successione (an)n∈Nconvergente verso un numero reale x0 ∈ R; poiche an ∈ [a, b] per ogni n ∈ N, deve essereanche x0 ∈ [a, b]. Inoltre, per ogni n ∈ N,
0 ≤ |ak(n) − bk(n)| <1
k(n) + 1≤
1
n+ 1(1)

8.4 Funzioni uniformemente continue 209
e quindi limn→+∞ |ak(n)−bk(n)| = 0, da cui limn→+∞ bk(n) = limn→+∞ ak(n)+(bk(n)−ak(n)) = x0. Poiche la funzione f e continua in x0, dalla caratterizzazione sequenziale del
limite (Teorema 7.1.3) si deve avere limn→+∞ f(ak(n)) = f(x0), limn→+∞ f(bk(n)) =
f(x0) e conseguentemente limn→+∞ |f(ak(n)) − f(bk(n))| = 0. A questo punto, poiche
ε0 > 0, dalla definizione di limite, deve esistere ν ∈ N tale che, per ogni n ≥ ν, |f(ak(n))−f(bk(n))| < ε0, e cio contraddice la (1). #
Una funzione reale f : X → R si dice lipschitziana se esiste un numeroreale L ∈ R+ tale che, per ogni x, y ∈ X,
|f(x)− f(y)| ≤ L|x− y| . (8.4.2)
Il numero L viene denominato inoltre costante di Lipschitz della funzionef .
Spesso si dice anche che f e L-lipschitziana per indicare che f e lipschi-tziana e che L e una sua costante di Lipschitz.
Vale il seguente legame con le funzioni uniformemente continue.
Proposizione 8.4.3 Siano X un sottoinsieme non vuoto di R ed f : X →R una funzione lipschitziana. Allora f e uniformemente continua.
Dimostrazione. Sia L ∈ R+ una costante di Lipschitz di f . Fissato ε > 0 e postoδ = ε/(L+ 1), dalla (8.4.2) si ha, per ogni x, y ∈ X tali che |x− y| < δ,
|f(x)− f(y)| ≤ L|x− y| < Lδ =L
L+ 1ε < ε
e cio, per l’arbitrarieta di ε > 0, dimostra che f e uniformemente continua. #
La proposizione precedente non puo essere invertita nemmeno se f euniformemente continua in un intervallo chiuso e limitato. Ad esempio, larestrizione della funzione radice quadrata all’intervallo [0, 1] e continua equindi, per il Teorema 8.4.2, e anche uniformemente continua, ma non elipschitziana; infatti, se L ∈ R+, la diseguaglianza |
√x − √y| ≤ L|x − y|
comporta, moltiplicando entrambi i membri per√x+√y,
|x− y| ≤ L|x− y|(√x+√y)
e puo essere verificata solo se x = y oppure se L = 0 e√x+√y ≥ 1/L.
Si osserva infine che se f : X → R e g : X → R sono funzioni realilipschitziane con costanti di Lipschitz L1 e rispettivamente L2, allora
1) f + g e (L1 + L2)-lipschitziana.
2) Se f e g sono limitate e se, per ogni x ∈ X, |f(x)| ≤M1 e |g(x)| ≤M2,il prodotto f · g e (L1M2 + L2M1)-lipschitziana.
3) Se λ ∈ R, la funzione λ f e |λ|L-lipschitziana.

Capitolo 9
Calcolo differenziale
Il calcolo differenziale mette a disposizione alcuni degli strumenti piu efficaciper lo studio di una funzione reale. Nella prima sezione ci si occupa delledefinizioni, della loro interpretazione geometrica e delle regole di derivazione;nella seconda sezione si studiano i risultati piu importanti riguardanti lefunzioni derivabili ed infine nell’ultima sezione i risultati ottenuti vengonoapplicati allo studio delle funzioni reali.
9.1 Funzioni derivabili
9.1.1 Definizioni ed interpretazione geometrica
Definizione 9.1.1 Siano X un sottoinsieme di R, x0 ∈ X un punto diaccumulazione per X ed f : X → R una funzione reale. Si dice che f edotata di derivata in x0 se esiste il limite
limx→x0
f(x)− f(x0)
x− x0.
In tal caso, tale limite viene denominato derivata di f in x0 (oppure derivataprima di f in x0) e denotato con uno dei simboli:
f ′(x0) , Df(x0) ,df(x0)
dx(talvolta (Df(x))x=x0 ,
(df(x)
dx
)
x=x0
);
pertanto
f ′(x0) := limx→x0
f(x)− f(x0)
x− x0. (9.1.1)
Se, in piu, il limite (9.1.1) esiste ed e finito, si dice che f e derivabilein x0.

212 Capitolo 9: Calcolo differenziale
Inoltre, se A e un sottoinsieme di X, si dice che f e dotata di deri-vata in A (rispettivamente, derivabile in A) se essa e dotata di derivata(rispettivamente, derivabile) in ogni elemento x0 ∈ A.
Infine, si dice che f e dotata di derivata (rispettivamente, derivabile) see dotata di derivata in X (rispettivamente, derivabile in X).
Posto h := x− x0, il limite (9.1.1) puo essere espresso come segue
f ′(x0) = limh→0
f(x0 + h)− f(x0)
h.
La funzione Rx0(f) : X " x0 → R definita ponendo, per ogni x ∈X " x0,
Rx0(f)(x) :=f(x)− f(x0)
x− x0(9.1.2)
viene denominata funzione rapporto incrementale di f in x0. Quindi f edotata di derivata in x0 se e solo la funzione rapporto incrementale di f inx0 e dotata di limite in x0 e che, in tal caso, si ha
f ′(x0) = limx→x0
Rx0(f)(x) .
Inoltre, se f e derivabile in x0, la funzione Rx0(f) puo essere definita anchein x0 ponendo Rx0(f) := f ′(x0) e in tal modo risulta continua in x0. Nelseguito, la funzione Rx0(f) si intendera definita in tutto X nel case in cuif sia derivabile.
Se il punto x0 e di accumulazione a destra oppure a sinistra si puo definirein maniera analoga la derivata destra o sinistra di f in x0. Precisamente, sex0 ∈ X e un punto di accumulazione a destra (rispettivamente, a sinistra)per X ed f : X → R e una funzione reale, si dice che f e dotata di derivatadestra (rispettivamente, sinistra) in x0 se esiste il limite
limx→x+
0
f(x)− f(x0)
x− x0(rispettivamente, lim
x→x−0
f(x)− f(x0)
x− x0).
Il limite precedente, se esiste, viene denominato derivata destra (rispet-tivamente, sinistra) di f in x0 e denotato con uno dei simboli:
f ′+(x0) , Ddf(x0) (rispettivamente, f ′
−(x0) , Dsf(x0) );
pertanto
f ′+(x0) := lim
x→x+0
f(x)− f(x0)
x− x0, (9.1.3)
(rispettivamente, f ′−(x0) := lim
x→x−0
f(x)− f(x0)
x− x0).

9.1 Funzioni derivabili 213
Se il limite (9.1.3) esiste ed e finito, si dice che f e derivabile a destra(rispettivamente, a sinistra) in x0.
Anche in questo caso, se A e un sottoinsieme di X, si dice che f e dotatadi derivata destra (rispettivamente, dotata di derivata sinistra, derivabilea destra, derivabile a sinistra) in A se essa e dotata di derivata destra(rispettivamente, dotata di derivata sinistra, derivabile a destra, derivabilea sinistra) in ogni elemento x0 ∈ A. Quando il sottoinsieme A non vienespecificato si intende l’intero X.
Assegnata una funzione reale f : X → R, e considerati gli insiemi
X ′ := x0 ∈ X | f e derivabile in x0 ,
X ′+ := x0 ∈ X | f e derivabile a destra in x0 ,
X ′− := x0 ∈ X | f e derivabile a sinistra in x0 ,
si possono definire le funzioni g : X ′ → R, g+ : X ′+ → R e g− : X ′
− → Rponendo g(x) := f ′(x) (x ∈ X ′), g′+(x) := f ′
+(x) (x ∈ X ′+), g
′−(x) := f ′
−(x)(x ∈ X ′
−); la funzione g viene denominata funzione derivata prima di f edenotata con il simbolo f ′, mentre le funzioni g+ e g− vengono denominaterispettivamente funzione derivata destra e funzione derivata sinistra di f edenotate con il simbolo f ′
+ e rispettivamente f ′−.
Dalle definizioni assunte e dai teoremi sui limiti segue direttamente chese x0 ∈ X e un punto di accumulazione sia a destra che a sinistra per X,allora una funzione reale f : X → R e dotata di derivata (rispettivamente,e derivabile) in x0 se e solo se f e dotata di derivata a destra e a sinistra(rispettivamente, f e derivabile sia a destra che a sinistra) in x0 ed inoltref ′+(x0) = f ′
−(x0).
Nel risultato seguente si esaminano le relazioni esistenti tra derivabilitae continuita.
Proposizione 9.1.2 (Continuita delle funzioni derivabili)Siano X un sottoinsieme di R, x0 ∈ X un punto di accumulazione per Xed f : X → R una funzione reale. Se f e derivabile in x0, allora essa econtinua in x0.
Conseguentemente, se f e derivabile, allora f e anche continua.
Dimostrazione. Per ogni x ∈ X " x0, si puo scrivere
f(x) = f(x)− f(x0) + f(x0) =f(x)− f(x0)
x− x0(x− x0) + f(x0) ;
poiche f e derivabile in x0, segue
limx→x0
f(x) = limx→x0
(f(x)− f(x0)
x− x0(x− x0) + f(x0)
)= f ′(x0) · 0 + f(x0) = f(x0) ,

214 Capitolo 9: Calcolo differenziale
da cui la tesi. #
Si osserva che la Proposizione 9.1.2 non puo essere invertita.Ad esempio, la funzione valore assoluto e continua in 0 ma non e deri-
vabile in 0 in quanto
limx→0+
|x|− |0|x− 0
= limx→0
x
x= 1 , lim
x→0−
|x|− |0|x− 0
= limx→0
−xx
= −1 ,
e quindi la derivata destra non coincide con quella sinistra.
Si considera ora un’interpretazione geometrica della derivata di una fun-zione in un punto x0. Si supponga che f : X → R sia dotata di derivatain x0 e sia t ∈ X " x0; si denoti con P0 il punto del piano cartesiano dicoordinate (x0, f(x0)) e con P quello di coordinate (t, f(t)). Allora la rettapassante per i punti P0 e P ha equazione
y − f(x0)
x− x0=
f(t)− f(x0)
t− x0.
Tale retta viene denominata secante il grafico di f nei punti P0 e Ped il suo coefficiente angolare e dato dal rapporto incrementale di f in x0
calcolato in t.Considerando il limite del rapporto incrementale nel punto x0, il coef-
ficiente angolare della retta secante tende verso il numero f ′(x0), che rap-presenta ancora il coefficiente angolare di una retta passante per P0. Taleretta viene denominata retta tangente al grafico di f nel punto P0.
Considerando il limite per t → x0 nell’equazione della retta secante,segue che se f e derivabile in x0, l’equazione della retta tangente e data da
y = f(x0) + f ′(x0)(x− x0) . (9.1.4)
mentre se f e dotata di derivata in x0 uguale a +∞ oppure a −∞, l’equa-zione della retta tangente e
x = x0 . (9.1.5)
La stessa interpretazione geometrica puo essere fornita per le funzioniche non sono dotate di derivata in x0, ma per cui esiste la derivata destrain x0 e la derivata sinistra in x0. Ad esempio, se f e derivabile a destra ea sinistra in x0 e se f ′
+(x0) = f ′−(x0), allora non si puo considerare la retta
tangente al grafico di f in x0, ma si possono considerare la retta tangentea destra al grafico di f in x0, di equazione
y = f(x0) + f ′+(x0)(x− x0)
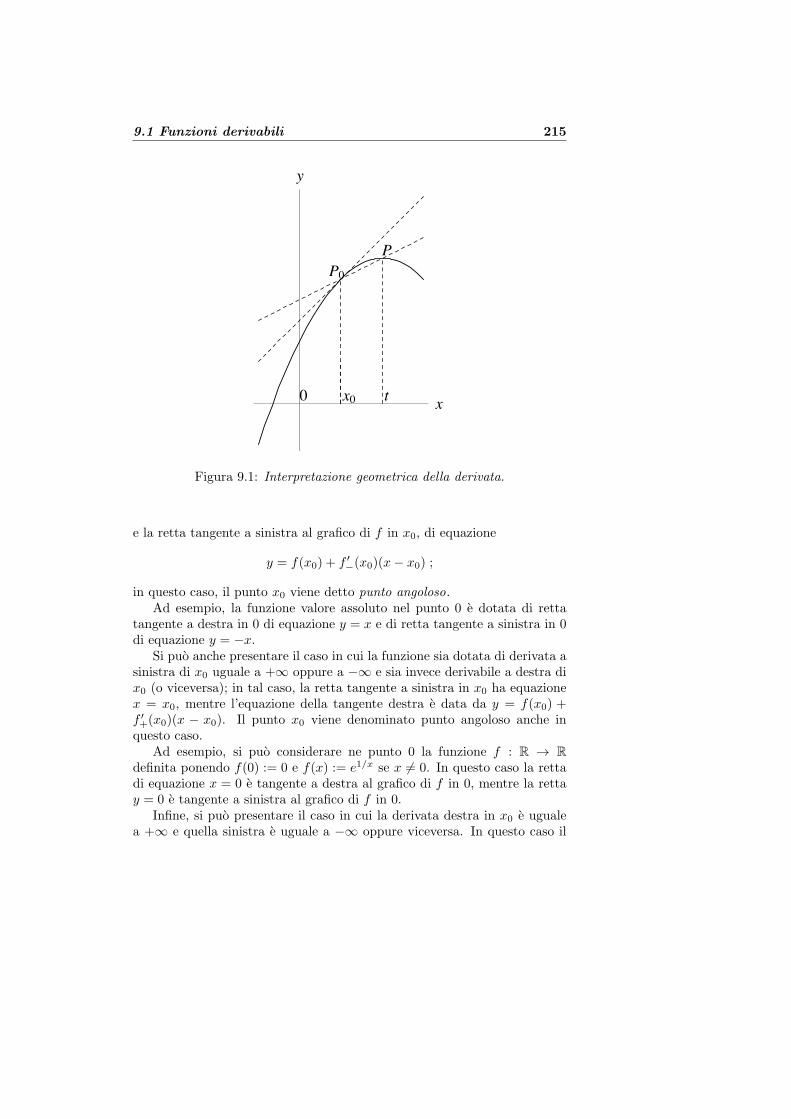
9.1 Funzioni derivabili 215
x
y
0 tx0
PP0
Figura 9.1: Interpretazione geometrica della derivata.
e la retta tangente a sinistra al grafico di f in x0, di equazione
y = f(x0) + f ′−(x0)(x− x0) ;
in questo caso, il punto x0 viene detto punto angoloso.Ad esempio, la funzione valore assoluto nel punto 0 e dotata di retta
tangente a destra in 0 di equazione y = x e di retta tangente a sinistra in 0di equazione y = −x.
Si puo anche presentare il caso in cui la funzione sia dotata di derivata asinistra di x0 uguale a +∞ oppure a −∞ e sia invece derivabile a destra dix0 (o viceversa); in tal caso, la retta tangente a sinistra in x0 ha equazionex = x0, mentre l’equazione della tangente destra e data da y = f(x0) +f ′+(x0)(x − x0). Il punto x0 viene denominato punto angoloso anche inquesto caso.
Ad esempio, si puo considerare ne punto 0 la funzione f : R → Rdefinita ponendo f(0) := 0 e f(x) := e1/x se x = 0. In questo caso la rettadi equazione x = 0 e tangente a destra al grafico di f in 0, mentre la rettay = 0 e tangente a sinistra al grafico di f in 0.
Infine, si puo presentare il caso in cui la derivata destra in x0 e ugualea +∞ e quella sinistra e uguale a −∞ oppure viceversa. In questo caso il
216 Capitolo 9: Calcolo differenziale
punto x0 viene denominato punto cuspidale. Si osservi che il grafico di f edotato di retta tangente sia a sinistra che a destra di equazione x = x0.
Ad esempio, si consideri la funzione f : R→ R definita ponendo, per ognix ∈ R, f(x) :=
√|x|. Nel punto 0 si verifica facilmente che f ′
+(0) = +∞mentre f ′
−(0) = −∞.
Se f : X → R e una funzione reale, si e gia considerato l’insieme X ′
degli elementi di X in cui f e derivabile e si e definita la funzione derivataprima f ′ : X ′ → R; naturalmente, se x0 ∈ X ′ e un punto di accumulazioneper X ′ ha senso chiedersi se la funzione f ′ sia a sua volta derivabile in x0.Vale quindi la seguente definizione.
Definizione 9.1.3 Siano X un sottoinsieme di R, x0 ∈ X un punto diaccumulazione per X ed f : X → R una funzione reale. Si dice che f edotata di derivata seconda (rispettivamente, derivabile due volte) in x0 seesiste δ > 0 tale che f sia derivabile in X∩]x0−δ, x0+δ[ e inoltre la funzionederivata prima f ′ e dotata di derivata (rispettivamente, derivabile) in x0.In tal caso, la derivata (f ′)′(x0) viene denominata derivata seconda di f inx0 e denotata con uno dei seguenti simboli
f ′′(x0) , D2f(x0) ,d2f
dx2(x0) .
Inoltre, se A e un sottoinsieme di X, si dice che f e dotata di deriva-ta seconda (rispettivamente, derivabile) in A, se essa e dotata di derivataseconda (rispettivamente, derivabile) in ogni x0 ∈ A.
Infine, si dice che f e dotata di derivata seconda (rispettivamente, deri-vabile) se essa e dotata di derivata seconda (rispettivamente, derivabile) inX.
In base alla definizione precedente, si puo considerare l’insieme
X ′′ := x ∈ X | f e derivabile due volte in x
e si puo definire la funzione g : X ′′ → R ponendo, per ogni x ∈ X ′′,g(x) = f ′′(x).
Tale funzione viene denominata derivata seconda di f e denotata con il
simbolo f ′′ (oppure D2f ,d2f
dx2).
In maniera analoga si definiscono le derivate successive di f in un puntooppure in un sottoinsieme.
Fissato un numero naturale n ≥ 1, la derivata n-esima di f in un puntox0 si denota con uno dei simboli
f (n)(x0) , Dnf(x0) ,dnf
dxn(x0) ,

9.1 Funzioni derivabili 217
e la funzione derivata n-esima con il simbolo f (n) (oppure Dnf ,dnf
dxn).
Per uniformita di notazioni conviene anche porre f (0) = f .
Se X e un sottoinsieme di R, si ricorda che il simbolo C(X) denotal’insieme di tutte le funzioni reali continue definite in X.
Piu in generale, sara utile considerare, per ogni numero naturale n ∈ N,l’insieme
Cn(X) := f ∈ C(X) | f e derivabile n volte in X e f (n) e continua .
L’insieme C0(X) coincide con C(X) e l’insieme C1(X) e costituito dallefunzioni derivabili tali che f ′ ∈ C(X).
Le funzioni f : X → R che sono derivabili n volte per ogni n ∈ Nvengono denominate infinite volte derivabili ; si pone
C∞(X) := f ∈ C(X) | f e infinite volte derivabile in X ;
ovviamente, la derivata n-esima f (n) di una funzione f ∈ C∞(X) e sicura-mente continua in quanto e a sua volta derivabile (anzi, f (n) ∈ C∞(X)).
9.1.2 Regole di derivazione
Assegnata una funzione reale, lo studio della sua derivabilita ed il calcolodella derivata puo essere effettuato utilizzando le regole di derivazione pre-sentate e il calcolo delle derivate delle funzioni elementari di cui ci si occupanella presente sezione e nella successiva.
Per semplicita, viene considerato solamente il caso di funzioni derivabili;una discussione del tutto analoga vale per funzioni derivabili a destra oppurea sinistra.
Teorema 9.1.4 (Derivabilita della funzione somma)Siano X un sottoinsieme non vuoto di R ed f : X → R e g : X → Rfunzioni reali. Se x0 ∈ X e un punto di accumulazione per X ed f e g sonoderivabili in x0, allora f + g e derivabile in x0 e si ha
(f + g)′(x0) = f ′(x0) + g′(x0) .
Conseguentemente, se f e g sono derivabili, anche la funzione somma f +ge derivabile e si ha
(f + g)′ = f ′ + g′ .
Dimostrazione. Dal primo teorema sul limite della somma si ha
limx→x0
(f + g)(x)− (f + g)(x0)
x− x0= lim
x→x0
f(x)− f(x0)
x− x0+ lim
x→x0
g(x)− g(x0)
x− x0
= f ′(x0) + g′(x0) ,
da cui segue interamente la tesi. #

218 Capitolo 9: Calcolo differenziale
Teorema 9.1.5 (Regola di Leibnitz sulla derivabilita della funzioneprodotto)Siano X un sottoinsieme non vuoto di R ed f : X → R e g : X → Rfunzioni reali. Se x0 ∈ X e un punto di accumulazione per X ed f e g sonoderivabili in x0, allora la funzione f · g e derivabile in x0 e si ha
(f · g)′(x0) = f ′(x0)g(x0) + f(x0)g′(x0) .
Conseguentemente, se f e g sono derivabili, anche la funzione prodotto f ·ge derivabile e si ha
(f · g)′ = f ′ · g + f · g′ .
Dimostrazione. Dal primo teorema sul limite del prodotto e tenendo presente che g econtinua in x0 (Proposizione 9.1.2), si ha
limx→x0
(f · g)(x)− (f · g)(x0)
x− x0
= limx→x0
f(x)g(x)− f(x0)g(x)
x− x0+ lim
x→x0
f(x0)g(x)− f(x0)g(x0)
x− x0
= limx→x0
g(x)f(x)− f(x0)
x− x0+ lim
x→x0f(x0)
g(x)− g(x0)
x− x0
= g(x0)f′(x0) + f(x0)g
′(x0) ,
e da cio segue la tesi. #
Teorema 9.1.6 (Derivabilita della funzione reciproca)Siano X un sottoinsieme non vuoto di R ed f : X → R una funzione realetale che, per ogni x ∈ X, f(x) = 0. Se x0 ∈ X e un punto di accumulazioneper X e se f e derivabile in x0, allora la funzione reciproca 1/f e derivabilein x0 e si ha (
1
f
)′(x0) = −
f ′(x0)
f(x0)2.
Conseguentemente, se f e derivabile, anche la funzione reciproca 1/f ederivabile e si ha (
1
f
)′= − f ′
f2.
Dimostrazione. Dalla Proposizione 9.1.2, la funzione f e continua in x0 e quindi
limx→x0
(1/f)(x)− (1/f)(x0)
x− x0= lim
x→x0
−(f(x)− f(x0))
x− x0
1
f(x) f(x0)= −
f ′(x0)
f(x0)2,
da cui la tesi. #
9.1 Funzioni derivabili 219
Teorema 9.1.7 (Derivabilita della funzione quoziente)Siano X un sottoinsieme non vuoto di R ed f : X → R e g : X → Rfunzioni reali. Si supponga che, per ogni x ∈ X, g(x) = 0. Se x0 ∈ X eun punto di accumulazione per X ed f e g sono derivabili in x0, allora lafunzione f/g e derivabile in x0 e si ha
(f
g
)′(x0) =
f ′(x0) g(x0)− f(x0) g′(x0)
g(x0)2.
Conseguentemente, se f e g sono derivabili, anche la funzione quozientef/g e derivabile in x0 e si ha
(f
g
)′=
f ′ g − f g′
g2.
Dimostrazione. Poichef
g= f ·
1
g,
la derivabilita di f/g deriva direttamente dai Teoremi 9.1.6 e 9.1.5 precedenti; inoltre,dagli stessi teoremi segue
(f
g
)′(x0) = f ′(x0)
1
g(x0)+ f(x0)
(1
g
)′(x0) =
f ′(x0) g(x0)− f(x0) g′(x0)
g(x0)2.
e cio completa la dimostrazione. #
Si esamina, infine, la derivabilita delle funzioni composte e delle funzioniinverse.
Teorema 9.1.8 (Teorema di derivazione delle funzioni composte)Siano X e Y sottoinsiemi non vuoti di R ed f : X → R e g : Y → Rfunzioni reali tali che f(X) ⊂ Y . Sia x0 ∈ X un punto di accumulazioneper X e si supponga che f sia derivabile in x0 e, posto y0 := f(x0), chey0 sia di accumulazione per Y e g sia derivabile in y0. Allora, la funzionecomposta g f : X → R e derivabile in x0 e si ha
(g f)′(x0) = g′(y0) f′(x0) .
Dimostrazione. Per quanto osservato in precedenza (vedasi la (9.1.2)), la funzioneRy0 (g) : Y → R e continua in y0 e inoltre, dalla Proposizione 9.1.2, la funzione f econtinua in x0. Allora, dal teorema sulla continuita delle funzioni composte (Teorema8.1.3), la funzione Ry0 (g) f e continua in x0 e pertanto
limx→x0
g(f(x))− g(y0)
f(x)− y0= g′(y0) .
Da cio segue
limx→x0
g(f(x))− g(f(x0))
x− x0= lim
x→x0
g(f(x))− g(f(x0))
f(x)− f(x0)
f(x)− f(x0)
x− x0
= limx→x0
g(f(x))− g(y0)
f(x)− y0lim
x→x0
f(x)− f(x0)
x− x0
= g′(y0)f′(x0)

220 Capitolo 9: Calcolo differenziale
e quindi la tesi. #
Se f : X → R e una funzione reale iniettiva, posto Y = f(X), si puoconsiderare la funzione “inversa” f−1 : Y → R di f . Se x0 ∈ X e un puntodi accumulazione per X e se f e continua in x0, allora l’elemento y0 = f(x0)di Y e un punto di accumulazione per Y .
Infatti, considerato un intorno I di y0, dalla continuita di f in x0, si puo trovare un
intorno J di x0 tale che, per ogni x ∈ X ∩ J " x0, f(x) ∈ I; l’insieme X ∩ J " x0 e
non vuoto in quanto x0 e di accumulazione per X e considerato x ∈ X ∩ J " x0, dallainiettivita di f , segue f(x) = y0, per cui f(x) ∈ Y ∩I"y0; segue pertanto che l’insieme
Y ∩ I " y0 e non vuoto e cio, essendo I un intorno arbitrario di y0, dimostra che y0 e
di accumulazione per Y .
Per quanto riguarda la derivabilita di f−1 in y0, si ha quanto segue.
Teorema 9.1.9 (Derivabilita della funzione inversa)Siano X un sottoinsieme non vuoto di R ed f : X → R una funzione realeiniettiva. Sia x0 ∈ X un punto di accumulazione per X e si supponga che fsia derivabile in x0 e che f ′(x0) = 0. Posto Y = f(X) e y0 = f(x0), se lafunzione inversa f−1 : Y → R di f e continua in y0, allora f−1 e derivabilein y0 e si ha
(f−1)′(y0) =1
f ′(x0).
Conseguentemente, se f e derivabile e se f−1 e continua, allora f−1 ederivabile e si ha
(f−1)′ =1
f ′ f−1.
Dimostrazione. La funzione Rx0 (f) : X → R e continua in x0 (vedasi la (9.1.2)) e inoltrenel punto x0 assume il valore f ′(x0) = 0 e, dalla iniettivita di f , Rx0 (f)(x) = 0 per ognix ∈ X " x0. Quindi Rx0 (f) assume valori sempre diversi da 0 e se ne puo considerarela funzione reciproca 1/Rx0 (f) : X → R, la quale risulta continua in y0. Inoltre f−1 econtinua in y0 e quindi, dal teorema sulla continuita delle funzioni composte (Teorema8.1.3), si ha
limy→y0
(1
Rx0 (f) f−1
)(y) =
(1
Rx0 (f) f−1
)(y0) ;
da tale relazione, essendo per ogni y ∈ Y " y0,(
1
Rx0 (f) f−1
)(y) =
1
f(f−1(y))− f(x0)
f−1(y)− x0
=f−1(y)− x0
f(f−1(y))− f(x0)=
f−1(y)− f−1(y0)
y − y0
e inoltre (1
Rx0 (f) f−1
)(y) =
1
Rx0 (f)(x0) =
1
f ′(x0),
si ha direttamente la tesi. #
Se non si suppone che f−1 sia continua in y0, la tesi del teorema prece-dente in generale non vale.

9.1 Funzioni derivabili 221
Ad esempio, si consideri la funzione reale f :] − 1, 1] → R definitaponendo, per ogni x ∈]− 1, 1],
f(x) :=
x+ 1 , x ∈]− 1, 0] ,x− 1 , x ∈]0, 1] ;
Nel punto x0 = 1, f e derivabile e si verifica direttamente che f’(1)=1=S0/0; inoltre f e iniettiva e la funzione f−1 risulta definita in ]− 1, 1] e si ha,per ogni y ∈]− 1, 1],
f−1(y) =
y − 1 , y ∈]− 1, 0] ,y + 1 , y ∈]0, 1] .
Nel punto y0 = f(1) = 0, f−1 non e continua e risulta f−1+ (0) = 1 e
f−1− (0) = −1, per cui f−1 non e derivabile in 0.
9.1.3 Derivate delle funzioni elementari
Nella presente sezione vengono calcolate le derivate delle funzioni elementari.
Funzioni potenza ad esponente intero positivo
Si consideri la funzione potenza n-esima fn : R → R, n ≥ 1, e sia x0 ∈ R.Per ogni x ∈ R, si ha
xn − xn0 = (x− x0)
n−1∑
k=0
xkxn−k0
e quindi
limx→x0
xn − xn0
x− x0= lim
x→x0
n−1∑
k=0
xkxn−k0 = nxn−1
0
(se n = 1, si assume per convenzione x00 = 1 per x0 = 0). Pertanto la
funzione potenza fn e derivabile in x0 e (fn)′(x0) = nxn−10 .
Dall’arbitrarieta di x0 ∈ R, segue che fn e derivabile e, per ogni x ∈ R,
Dxn = nxn−1 .

222 Capitolo 9: Calcolo differenziale
Funzioni radice
Si consideri la funzione radice f1/n, n ≥ 1. Se x0 = 0, si ha
limh→0
n√x0 + h− n
√x
h= n√x0 lim
h→0
1n√x0
n√x0 + h− n
√x
h
= n√x0 lim
h→0
n√
h/x0 − 1
h
=n√x0
x0limh→0
(1 +
h
x0
)1/n
− 1
h/x0
=1
n
√xn−10
limy→0
(1 + y)1/n − 1
y=
1
n
1
n
√xn−10
.
Segue che f1/n e derivabile in ogni x ∈]0,+∞[ per n pari ed in ognix ∈ R" 0 se n e dispari e la sua derivata e data da
1
n
1n√xn−1
.
Per quanto riguarda il punto x0 = 0, per ogni n ≥ 2 risulta
limx→0
n√x
x= +∞
e quindi la funzione radice n-esima e dotata di derivata in 0 uguale a +∞.
Funzioni potenza ad esponente intero negativo
Si consideri la funzione potenza ad esponente intero negativo f−n : R "0→ R, n ≥ 1.
Tale funzione e la reciproca della restrizione della funzione potenza fnall’insieme R" 0; essa pertanto e derivabile e, per ogni x ∈ R" 0, si ha
D
(1
xn
)= − nxn−1
x2n= − n
xn+1.
Funzioni potenza ad esponente razionale o reale
Si consideri la funzione potenza ad esponente razionale o reale fr definitain ]0,+∞[ per r ≤ 0 ed in [0,+∞[ per r > 0. Per ogni x0 ∈]0,+∞[ risulta
limh→0
(x0 + h)r − xr0
h= xr
0 limh→0
xr0
x0limh→0
(1 + h/x0)r − 1
h/x0
= xr−10 lim
y→0
(1 + y)r − 1
y= rxr−1
0 .

9.1 Funzioni derivabili 223
Quindi fr e derivabile in x0 e la sua derivata e rxr−10 . Si conclude che fr e
derivabile in ]0,+∞[ e, per ogni x ∈]0,+∞[ si ha
D(xr) = rxr−1 .
Se r > 0, nel punto x0 = 0, si ha
limx→0+
xr
x=
⎧⎨
⎩
0 , r > 1 ;1 , r = 1 ;+∞ , 0 < r < 1 .
Quindi, se r ≥ 1, fr e derivabile in 0 con derivata nulla per r > 1 ed ugualead 1 per r = 1 ed e dotata di derivata in 0 uguale a +∞ se 0 < r < 1.
Funzioni esponenziali
Sia a > 0, a = 1 e si consideri la funzione esponenziale expa : R → R.Allora, per ogni x0 ∈ R, si ha
limh→0
ax0+h − ax0
h= ax0 lim
h→0
ah − 1
h= ax0 log a .
Quindi expa e derivabile e, per ogni x ∈ R,
D(ax) = ax log a .
In particolare, per ogni x ∈ R, si ha D(ex) = ex.
Funzioni logaritmo
Sia a > 0, a = 1 e si consideri la funzione logaritmo loga :]0,+∞[→ R.Dal Teorema 9.1.9 segue che essa e derivabile e, per ogni x ∈]0,+∞[, postoy = loga x, si ha
D(loga x) =1
D(ay)=
1
ay log a=
1
x log a.
In particolare, per ogni x ∈ R, D(log x) = 1/x.
Funzioni trigonometriche
Si considerano ora le funzioni seno, coseno, tangente e cotangente. Per ognix0 ∈ R, risulta
limh→0
sin(x0 + h)− sinx0
h= lim
h→0
sinx0 cosh+ cosx0 sinh− sinx0
h
= cosx0 limh→0
sinh
h+ sinx0 lim
h→0
cosh− 1
h= cosx0

224 Capitolo 9: Calcolo differenziale
e analogamente
limh→0
cos(x0 + h)− cosx0
h= lim
h→0
cosx0 cosh− sinx0 sinh− cosx0
h
= − sinx0 limh→0
sinh
h+ cosx0 lim
h→0
cosh− 1
h= − sinx0 .
Quindi le funzioni seno e coseno sono derivabili e si ha, per ogni x ∈ R,
D(sinx) = cosx , D(cosx) = − sinx .
Essendo quoziente di funzioni derivabili, dal Teorema 9.1.7 segue che anchele funzioni tangente e cotangente sono derivabili e si ha, per ogni x ∈ R "π/2 + kπ | k ∈ Z,
D(tanx) =1
cos2 x= 1 + tan2 x .
e analogamente, per ogni x ∈ R" kπ | k ∈ Z,
D(cotx) = − 1
sin2 x= −(1 + cot2 x) .
Funzioni trigonometriche inverse
Infine, si considerano le funzioni arcoseno, arcocoseno, arcotangente e arco-cotangente.
La restrizione della funzione seno all’intervallo [−π/2,π/2] e derivabile ela sua derivata si annulla solamente nei punti −π/2 e π/2, che sono i valoridella funzione arcoseno agli estremi dell’intervallo [−1, 1]. Dal Teorema 9.1.9segue che la funzione arcoseno e derivabile in ]− 1, 1[ e per ogni x ∈]− 1, 1[,posto y = arcsinx ∈]− π/2,π/2[, si ottiene sin y = x e cos y =
√1− x2 (si
e tenuto presente che nell’intervallo ] − π/2,π/2[ il coseno e positivo), percui
D(arcsinx) =1
D(sin y)=
1
cos y=
1√1− x2
.
Per quanto riguarda i punti −1 ed 1, si verifica direttamente che in talipunti la funzione arcoseno e dotata di derivata uguale a +∞.
Per la funzione arcocoseno il procedimento e analogo a quello preceden-te; si osserva che la restrizione della funzione coseno all’intervallo [0,π] ederivabile e la sua derivata si annulla solamente nei punti 0 e π; tali valorisono assunti dalla funzione arcocoseno nei punti 1 e rispettivamente −1.Applicando il Teorema 9.1.9 si deduce che la funzione arcocoseno e deriva-bile in ] − 1, 1[ e per ogni x ∈] − 1, 1[, posto y = arccosx ∈]0,π[, si ottiene

9.1 Funzioni derivabili 225
cos y = x e sin y =√1− x2 in quanto il coseno e positivo nell’intervallo
]0,π[; pertanto
D(arccosx) =1
D(cos y)= − 1
sin y= − 1√
1− x2.
Nei punti −1 ed 1, si verifica direttamente che la funzione arcocoseno edotata di derivata uguale a −∞.
Si consideri ora la funzione arcotangente. In questo caso, la restrizionedella funzione tangente all’intervallo ]−π/2,π/2[ e derivabile e la sua deriva-ta e sempre diversa da 0. Dal Teorema 9.1.9 segue che la funzione arcotan-gente e derivabile e inoltre, per ogni x ∈ R, posto y = arctanx ∈]−π/2,π/2[,si ottiene tan y = x, per cui
D(arctanx) =1
D(tan y)=
1
1 + tan2 y=
1
1 + x2.
Infine, per quanto riguarda la derivabilita della funzione arcocotangente,si puo procedere come nel caso precedente; la restrizione della funzionecotangente all’intervallo ]0,π[ e derivabile e la sua derivata e sempre diversada 0. Dal Teorema 9.1.9 segue che la funzione arcocotangente e derivabile einoltre, per ogni x ∈ R, posto y = arccotx ∈]0,π[, si ottiene cot y = x, percui
D(arccotx) =1
D(cot y)= − 1
1 + cot2 y= − 1
1 + x2.
La derivabilita ed il calcolo della derivata delle funzioni arcocoseno edarcocotangente potevano essere ottenute alternativamente dalle uguaglianze
arccos =π
2− arcsin , arctan =
π
2− arccot .
Funzione valore assoluto
Si e gia osservato che tale funzione non e derivabile in 0 e che in tale puntoha derivata destra uguale ad 1 e derivata sinistra uguale a −1.
Sia ora x0 ∈ R" 0; se x0 > 0, si ha
limx→x0
|x|− |x0|x− x0
= limx→x0
x− x0
x− x0= 1 ,
mentre, se x0 < 0, risulta
limx→x0
|x|− |x0|x− x0
= limx→x0
− x− x0
x− x0= −1 ,

226 Capitolo 9: Calcolo differenziale
Quindi la funzione valore assoluto e derivabile in R " 0 e, per ogni x ∈R" 0, si ha
D(|x|) = x
|x| (=|x|x
).
Osservazione 9.1.10 (Studio della derivabilita di una funzione reale) Leregole di derivazione e le derivate delle funzioni elementari consentono in nu-merosi casi di discutere la derivabilita e, in caso affermativo, di determinarela derivata di una funzione reale f : X → R ottenuta mediante operazionialgebriche sulle funzioni elementari. In generale si procede come segue:
1. Innanzitutto, si determina il sottoinsieme D di X dei punti in cui nonsi puo assicurare subito la derivabilita della funzione. Se la funzione eottenuta mediante operazioni algebriche o di composizione di funzionielementari, i punti dell’insieme D sono i seguenti:
a) punti in cui l’argomento di una funzione radice o di una funzionepotenza con esponente compreso tra 0 e 1 e uguale a 0 (in quantotali funzioni non sono derivabili in 0);
b) punti in cui l’argomento di una funzione arcoseno oppure arco-seno e uguale a 1 oppure a −1 (in quanto le funzioni arcoseno earcocoseno non sono derivabili nei punti ±1);
c) punti in cui l’argomento di un valore assoluto e uguale a 0 (inquanto la funzione valore assoluto non e derivabile nel punto 0).
Esclusi i punti precedenti, si puo asserire che la funzione f e derivabilein X "D.
2. Utilizzando le regole di derivazione, si calcola la derivata di f nell’in-sieme X "D.
3. Si studia la derivabilita di f in ogni punto x0 ∈ D. Poiche in questocaso non si possono utilizzare le regole di derivazione, bisogna verifi-care direttamente la derivabilita attraverso la definizione; nel seguito,si studiera la proprieta di continuita della derivata prima (Teorema9.3.3) in base alla quale la derivata di f in x0, se esiste, viene data dallimite limx→x0 f
′(x) e quindi per lo studio della derivabilita nei puntix0 ∈ D, ci si puo avvalere dell’espressione della derivata ottenuta alpunto 2) precedente.
A questo punto si raccolgono le informazioni ottenute e si precisadefinitivamente il sottoinsiemeX ′ diX in cui f e derivabile fornendoneil valore della derivata in ogni punto di X ′.

9.2 Teoremi di Rolle, Cauchy e Lagrange 227
9.2 Teoremi di Rolle, Cauchy e Lagrange
Anche per le funzioni derivabili valgono risultati di notevole interesse nelcaso in cui queste vengano considerate su un intervallo chiuso e limitato.
Teorema 9.2.1 (Teorema di Rolle)Sia f : [a, b]→ R una funzione reale continua in [a, b] e derivabile nell’inter-vallo aperto ]a, b[. Se f(a) = f(b), allora esiste almeno un punto x0 ∈]a, b[tale che f ′(x0) = 0.
Dimostrazione. Poiche f e continua, dal teorema di Weierstrass (Teorema 8.2.1), essa edotata di minimo e di massimo e quindi esistono c, d ∈ [a, b] tali che, per ogni x ∈ [a, b],f(c) ≤ f(x) ≤ f(d). Si supponga dapprima che entrambi i punti c e d siano estremidell’intervallo [a, b] (c, d ∈ a, b). Dall’ipotesi f(a) = f(b), segue f(c) = f(d) e quindi lafunzione f deve essere costante. Allora la derivata di f e costantemente nulla e quindi latesi e verificata considerando un qualsiasi elemento x0 ∈]a, b[.
Si considera ora il caso in cui almeno uno dei punti c oppure d sia interno all’intervallo[a, b]. Si supponga che c ∈]a, b[ per cui f e derivabile in c. Se fosse f ′(c) > 0, per laproprieta di permanenza del segno applicata alla funzione rapporto incrementale di frelativa a c, si puo trovare δ > 0 tale che, per ogni x ∈ [a, b]∩]c− δ, c+ δ["c,
f(x)− f(c)
x− c> 0 .
Poiche c e interno all’intervallo [a, b], l’intersezione [a, b]∩]c − δ, c[ risulta non vuota;considerato x ∈ [a, b]∩]c − δ, c[, risulta innanzitutto (f(x) − f(c))/(x − c) > 0; essendox − c < 0, dovra essere anche f(x) − f(c) < 0, da cui f(x) < f(c) e cio contraddice ilfatto che f(c) e il minimo di f . Se fosse f ′(c) < 0, si troverebbe δ > 0 tale che, per ognix ∈ [a, b]∩]c− δ, c+ δ["c,
f(x)− f(c)
x− c< 0 .
Poiche c e interno all’intervallo [a, b], si puo considerare x ∈ [a, b]∩]c, c + δ[ per il quale(f(x)− f(c))/(x− c) < 0; allora, essendo x− c > 0, si avrebbe ancora f(x)− f(c) < 0 equindi f(x) < f(c), contraddicendo anche in questo caso il fatto che f(c) e il minimo dif .
Si conclude che deve essere necessariamente f ′(c) = 0 e la tesi segue considerando
x0 = c. Se il punto d e interno all’intervallo [a, b], si dimostra in modo analogo che
f ′(d) = 0 e quindi si puo considerare x0 = d. #
Tenendo presente l’interpretazione geometrica della derivata, e che ilcoefficiente angolare di una retta e uguale a 0 se e solo se la retta e parallelaall’asse delle ascisse, si puo dire che per una funzione continua in un inter-vallo chiuso e limitato e derivabile tranne al piu che agli estremi, esiste unatangente orizzontale in almeno un punto interno a tale intervallo. Si osserviinoltre che i punti interni in cui la derivata di f si annulla sono quelli dimassimo e di minimo per f .
Dal teorema di Rolle possono essere dedotti facilmente i seguenti ulterioririsultati.

228 Capitolo 9: Calcolo differenziale
x
y
0 x0
Figura 9.2: Teorema di Rolle.
Teorema 9.2.2 (Teorema di Cauchy)Siano f : [a, b] → R e g : [a, b] → R funzioni reali continue in [a, b] ederivabili in ]a, b[ e si supponga che, per ogni x ∈]a, b[, g′(x) = 0. Allorag(a) = g(b) ed inoltre esiste almeno un punto x0 ∈]a, b[ tale che
f ′(x0)
g′(x0)=
f(b)− f(a)
g(b)− g(a). (9.2.1)
Dimostrazione. Se fosse g(a) = g(b), si potrebbe applicare il teorema di Rolle precedentealla funzione g e si otterrebbe l’esistenza di un punto interno all’intervallo [a, b] in cuila derivata di g si annullerebbe, il che e stato escluso per ipotesi. Quindi deve essereg(a) = g(b).
Si definisce ora la funzione h : [a, b] → R ponendo, per ogni x ∈ [a, b],
h(x) := f(x)−f(b)− f(a)
g(b)− g(a)(g(x)− g(a)) .
Tale funzione e continua in quanto somma di funzioni continue ed e derivabile in ]a, b[ inquanto somma di funzioni derivabili in ]a, b[; si ha inoltre
h(a) = f(a)−f(b)− f(a)
g(b)− g(a)(g(a)− g(a)) = f(a) ,
h(b) = f(b)−f(b)− f(a)
g(b)− g(a)(g(b)− g(a)) = f(b)− f(b) + f(a) = f(a) ,
e quindi h(a) = h(b). Si puo pertanto applicare il teorema di Rolle alla funzione h, e siconclude che esiste x0 ∈]a, b[ tale che h′(x0) = 0. Poiche, per ogni x ∈]a, b[,
h′(x) = f ′(x)−f(b)− f(a)
g(b)− g(a)g′(x) ,

9.2 Teoremi di Rolle, Cauchy e Lagrange 229
da h′(x0) = 0 segue
f ′(x0) =f(b)− f(a)
g(b)− g(a)g′(x0) ,
e dividendo entrambi i membri per g′(x0) = 0, si ottiene la tesi. #
Teorema 9.2.3 (Teorema di Lagrange, o del valor medio)Sia f : [a, b]→ R una funzione reale continua in [a, b] e derivabile in ]a, b[.Allora esiste almeno un punto x0 ∈]a, b[ tale che
f ′(x0) =f(b)− f(a)
b− a. (9.2.2)
Dimostrazione. Si consideri l’ulteriore funzione g : [a, b] → R definita ponendo, per ognix ∈ [a, b], g(x) = x. Tale funzione e derivabile e, per ogni x ∈ [a, b], g′(x) = 1 = 0. Sonoquindi soddisfatte le ipotesi del teorema di Cauchy precedente e pertanto esiste un puntox0 ∈]a, b[ tale che
f ′(x0)
g′(x0)=
f(b)− f(a)
g(b)− g(a);
poiche g′(x0) = 1 e g(b)− g(a) = b− a, la tesi e completamente dimostrata. #
Anche il teorema di Lagrange puo essere interpretato geometricamentein modo molto semplice. Si denoti infatti con A il punto del piano cartesianoavente coordinate (a, f(a)) e con B quello di coordinate (b, f(b)); la rettadel piano passante per i punti A e B (cioe, la retta secante il grafico di fnei punti a e b) ha equazione
y − f(a)
x− a=
f(b)− f(a)
b− a;
da cio segue che il secondo membro della (9.2.2) rappresenta il coefficienteangolare della retta passante per i punti A e B. Dal teorema di Lagrange,esiste un punto interno x0 ∈]a, b[ tale che la retta tangente al grafico di fin x0 abbia lo stesso coefficiente angolare della retta secante al grafico dif nei punti a e b. Quindi, si conclude che se f : [a, b] → R e continua in[a, b] e derivabile in ]a, b[, esiste almeno un punto interno x0 ∈]a, b[ in cui laretta tangente al grafico di f in x0 e la retta secante il grafico di f nei puntiestremi a e b sono parallele.
Il teorema di Lagrange e stato dedotto dal teorema di Cauchy il quale asua volta e stato dimostrato come conseguenza del teorema di Rolle. Si puoosservare inoltre che il teorema di Rolle e un caso particolare del teoremadi Lagrange in quanto, se f(a) = f(b), il secondo membro della (9.2.2) enullo. Si conclude che i Teoremi 9.2.1, 9.2.2 e 9.2.3 sono tra loro equivalentie conseguono dal teorema di Weierstrass per le funzioni continue e derivabiliall’interno di un intervallo chiuso e limitato.

230 Capitolo 9: Calcolo differenziale
x
y
0
A
B
x0
Figura 9.3: Teorema di Lagrange.
9.3 Applicazioni al calcolo dei limiti
9.3.1 Teoremi di L’Hopital
Un’importante applicazione del calcolo differenziale riguarda la possibilitadi risolvere in maniera elementare alcuni limiti che si presentano in unaforma indeterminata. Si riconosce subito, infatti, che se f : X → R eg : X → R sono funzioni derivabili in un punto x0 ∈ X con g′(x0) = 0 e sef(x0) = g(x0) = 0, allora per il limite
limx→x0
f(x)
g(x),
che si presenta nella forma indeterminata0
0, si ha
limx→x0
f(x)
g(x)=
f ′(x0)
g′(x0).

9.3 Applicazioni al calcolo dei limiti 231
Infatti, basta osservare che
limx→x0
f(x)
g(x)= lim
x→x0
f(x)− f(x0)
g(x)− g(x0)= lim
x→x0
f(x)− f(x0)
x− x0
g(x)− g(x0)
x− x0
=f ′(x0)
g′(x0).
Una situazione piu generale viene esaminata nei risultati successivi.
Teorema 9.3.1 (Prima regola di L’Hopital)Sia x0 ∈ R e si denoti con I uno degli intervalli ]a, x0[ oppure ]x0, b[ (a, b ∈R). Siano f : I → R e g : I → R funzioni reali tali che
1. Per ogni x ∈ I, g(x) = 0;
2. limx→x0
f(x) = 0, limx→x0
g(x) = 0;
3. f e g sono derivabili con g′(x) = 0 per ogni x ∈ I;
4. Esiste il limite limx→x0
f ′(x)
g′(x).
Allora esiste anche il limite limx→x0
f(x)
g(x)e si ha
limx→x0
f(x)
g(x)= lim
x→x0
f ′(x)
g′(x). (9.3.1)
Dimostrazione. Per brevita si considera solo il caso in cui I =]a, x0[. Si ponga ℓ :=limx→x0 f ′(x)/g′(x). Per ogni x ∈ I, risulta g(x) = 0, altrimenti g tenderebbe allo stessovalore 0 in due punti distinti e la sua derivata, come conseguenza del Teorema 9.2.1, sidovrebbe annullare in almeno un punto interno all’intervallo che ha come estremi talidue punti e cio e escluso dalle ipotesi. In una prima fase si considera il caso in cui ℓ ∈ R.Allora, fissato ε > 0, deve esistere x1 ∈ I tale che, per ogni x ∈]x1, x0[,
ℓ−ε
2<
f ′(x)
g′(x)< ℓ+
ε
2.
Per ogni x, t ∈]x1, x0[, x = t, dal Teorema 9.2.2 di Cauchy, esiste c ∈]x1, x0[ tale che
f ′(c)
g′(c)=
f(x)− f(t)
g(x)− g(t)
e quindi ∣∣∣∣f(x)− f(t)
g(x)− g(t)− ℓ
∣∣∣∣ <ε
2(1)
Sia ora x ∈]x1, x0[; dal fatto che limt→x0 f(t) = 0 e limt→x0 g(t) = 0, segue anchelimt→x0 (f(x)− f(t))/(g(x)− g(t)) = f(x)/g(x); se fosse
∣∣∣∣f(x)
g(x)− ℓ
∣∣∣∣ >ε
2,

232 Capitolo 9: Calcolo differenziale
dal fatto che ]−∞, ℓ−ε/2[∪]ℓ+ε/2,+∞[ e un intorno di f(x)/g(x), seguirebbe l’esistenzadi δ > 0 tale che, per ogni t ∈ I∩]x− δ, x+ δ["x,
∣∣∣∣f(x)− f(t)
g(x)− g(t)− ℓ
∣∣∣∣ >ε
2
e cio contraddice la (1).Quindi deve essere, per ogni x ∈]x1, x0[
∣∣∣∣f(x)
g(x)− ℓ
∣∣∣∣ ≤ε
2< ε .
Dall’arbitrarieta di ε > 0 segue quindi la tesi.Si considera ora il caso in cui ℓ = +∞ (se ℓ = −∞ si procede analogamente). Allora,
fissato M ∈ R, esiste x1 ∈ I tale che, per ogni x ∈]x1, x0[,
f ′(x)
g′(x)> M + 1 .
Come nel caso precedente, per ogni x, t ∈]x1, x0[, x = t, dal Teorema 9.2.2 di Cauchy, sitrova c ∈]x1, x0[ tale che
f ′(c)
g′(c)=
f(x)− f(t)
g(x)− g(t)
e quindif(x)− f(t)
g(x)− g(t)> M + 1. (2)
Sia ora x ∈]x1, x0[; dal fatto che limt→x0 f(t) = 0 e limt→x0 g(t) = 0, segue anchelimt→x0 (f(x)− f(t))/(g(x)− g(t)) = f(x)/g(x); se fosse
f(x)
g(x)< M + 1 ,
esisterebbe δ > 0 tale che, per ogni t ∈ I∩]x− δ, x+ δ["x,
f(x)− f(t)
g(x)− g(t)< M + 1
e cio contraddice la (2). Allora, per ogni x ∈]x1, x0[, deve essere
f(x)
g(x)≥ M + 1 > M
e dall’arbitrarieta di M ∈ R si ha la tesi anche in questo caso. #
Teorema 9.3.2 (Seconda regola di L’Hopital)Sia x0 ∈ R e si denoti con I uno degli intervalli ]a, x0[ oppure ]x0, b[ (a, b ∈R). Siano f : I → R e g : I → R funzioni reali tali che
1. limx→x0
|f(x)| = +∞, limx→x0
|g(x)| = +∞;
2. f e g sono derivabili con g′(x) = 0 per ogni x ∈ I;
3. Esiste il limite limx→x0
f ′(x)
g′(x).

9.3 Applicazioni al calcolo dei limiti 233
Allora esiste anche il limite limx→x0
f(x)
g(x)e si ha
limx→x0
f(x)
g(x)= lim
x→x0
f ′(x)
g′(x). (9.3.2)
Dimostrazione. In questo caso l’ipotesi che g sia diversa da 0 in un intorno di x0 eassicurata dal fatto che il limite del suo valore assoluto e infinito. Anche ora si consideraper brevita il caso in cui I =]a, x0[ e si pone ℓ := limx→x0 f ′(x)/g′(x).
Si suppone in una prima fase che ℓ ∈ R e si fissa ε > 0. Essendo limx→x0 f ′(x)/g′(x) =ℓ, si puo trovare x1 ∈ I tale che, per ogni x ∈]x1, x0[,
∣∣∣∣f ′(x)
g′(x)− ℓ
∣∣∣∣ <ε
2.
Si fissi t ∈]x1, x0[; per ogni x ∈]x1, x0[, x = t, dal Teorema 9.2.2 di Cauchy, esistec ∈]x1, x0[ tale che
f ′(c)
g′(c)=
f(t)− f(x)
g(t)− g(x)
e quindi
ℓ−ε
2<
f(t)− f(x)
g(t)− g(x)< ℓ+
ε
2. (1)
Poiche limx→x0 |f(x)| = +∞, limx→x0 |g(x)| = +∞, si puo trovare x2 ∈]x1, x0[ tale che,per ogni x ∈]x2, x0[, |f(t)| < |f(x)| e |g(t)| < |g(x)|. Pertanto, posto
χ(x) :=
1−f(t)
f(x)
1−g(t)
g(x)
per ogni x ∈]x2, x0[, si ha χ(x) > 0 e
f(t)− f(x)
g(t)− g(x)=
f(x)
g(x)χ(x) ;
conseguentemente, la (1) puo essere scritta al modo seguente, per ogni x ∈]x2, x0[,
ℓ− ε/2
χ(x)<
f(x)
g(x)<ℓ+ ε/2
χ(x). (2)
Poiche limx→x0 χ(x) = 1, si puo considerare x3 ∈]x2, x0[ tale che, per ogni x ∈]x3, x0[,
ℓ− ε ≤ℓ− ε/2
χ(x),
ℓ+ ε/2
χ(x)≤ ℓ+ ε
e quindi, dalla (2),
ℓ− ε <f(x)
g(x)< ℓ+ ε .
Dall’arbitrarieta di ε > 0 segue limx→x0 f(x)/g(x) = ℓ e quindi la tesi.Si considera ora il caso in cui ℓ = +∞ (se ℓ = −∞ il procedimento e analogo).
Fissato M ∈ R, da limx→x0 f ′(x)/g′(x) = ℓ, segue l’esistenza di x1 ∈ I tale che, per ognix ∈]x1, x0[,
f ′(x)
g′(x)> M + 1 .

234 Capitolo 9: Calcolo differenziale
Si fissi ora t ∈]x1, x0[; per ogni x ∈]x1, x0[, x = t, dal Teorema 9.2.2 di Cauchy, esistec ∈]x1, x0[ tale che
f ′(c)
g′(c)=
f(t)− f(x)
g(t)− g(x)e quindi
f(t)− f(x)
g(t)− g(x)> M + 1 . (3)
Come nel caso precedente, poiche limx→x0 |f(x)| = +∞, limx→x0 |g(x)| = +∞, esistex2 ∈]x1, x0[ tale che, per ogni x ∈]x2, x0[, |f(t)| < |f(x)| e |g(t)| < |g(x)| e quindi, posto
χ(x) :=
1−f(t)
f(x)
1−g(t)
g(x)
;
dunque, la (3) diviene, per ogni x ∈]x2, x0[,
f(x)
g(x)>
M + 1
χ(x). (4)
Essendo limx→x0 χ(x) = 1, risulta limx→x0 (M + 1)/χ(x) = M + 1 e pertanto si puoconsiderare x3 ∈]x2, x0[ tale che, per ogni x ∈]x3, x0[,
M + 1
χ(x)> M .
Dalla (4) segue, per ogni x ∈]x3, x0[,
f(x)
g(x)> M .
Dall’arbitrarieta di M ∈ R si ottiene la tesi. #
Nei risultati precedenti sono state considerate funzioni reali definite inintervalli del tipo ]a, x0[ oppure ]x0, b[ e quindi i limiti considerati coincidonocon i limiti da sinistra oppure da destra in x0. Naturalmente, considerandoseparatamente i limiti da destra e da sinistra in x0, gli stessi risultati valgonoper funzioni definite in ]a, b["x0 (a, b ∈ R). Conviene osservare che i Teoremi 9.3.1 e 9.3.2 forniscono condizioni suf-ficienti per l’esistenza del limite del rapporto di due funzioni. Nel caso incui il limite del rapporto delle derivate delle due funzioni non esista, nonsi puo concludere nulla per quanto riguarda il limite del rapporto delle duefunzioni e bisogna ricorrere a metodi differenti.
Ad esempio, si consideri il limite
limx→+∞
x
x+ sinx,
il quale si presenta nella forma indeterminata+∞+∞ ; tenendo presente che,
per ogni x > 1,x
x+ 1≤ x
x+ sinx≤ x
x− 1,

9.3 Applicazioni al calcolo dei limiti 235
si riconosce subito che tale limite e uguale ad 1; invece, il limite limx→+∞
1/(1+
cosx) del rapporto delle derivate non esiste.
Bisogna naturalmente anche accertarsi che il limite si presenti in unadelle forme indeterminate previste nei teoremi precedenti, altrimenti l’ap-plicazione delle regole di L’Hopital puo portare a risultati errati.
Ad esempio, il limite
limx→+∞
log(cosx) + x tanx
x+ 1
non esiste, mentre il limite limx→+∞ x (1+tan2 x) del rapporto delle derivatee uguale a +∞.
In generale, puo anche capitare che il limite del rapporto delle derivatesi presenti anch’esso in una forma indeterminata. In tal caso, si puo cercaredi continuare ad applicare ancora la stessa regola di L’Hopital e studiarecosı il limite del rapporto delle derivate seconde o ancora successive delledue funzioni. Piu precisamente, se f : I → R e g : I → R sono funzionireali derivabili n volte (n ≥ 1) e si supponga che, per ogni k = 1, . . . , n eper ogni x ∈ I, g(k)(x) = 0. Se, per ogni k = 0, . . . , n− 1,
limx→x0
f (k)(x) = 0 , limx→x0
g(k)(x) = 0
oppure
limx→x0
|f (k)(x)| = +∞ , limx→x0
|g(k)(x)| = +∞ ,
e se esiste il limite limx→x0
f (n)(x)
g(n)(x), allora esiste anche il limite lim
x→x0
f(x)
g(x)e si
ha
limx→x0
f(x)
g(x)= lim
x→x0
f (n)(x)
g(n)(x).
Le regole di L’Hopital possono essere applicate in maniera opportunaanche ad altre forme indeterminate.
• la forma indeterminata 0·(±∞) puo essere ricondotta a quelle previstenei risultati precedenti tenendo presente che, per ogni x ∈ I,
f(x) g(x) =f(x)
1/g(x)=
g(x)
1/f(x).

236 Capitolo 9: Calcolo differenziale
• Anche la forma indeterminata +∞−∞ puo essere ricondotta a quellepreviste dalle regole di L’Hopital tenendo presente che, per ogni x ∈ I,
f(x) + g(x) =
f(x) + g(x)
f(x)g(x)1
f(x)g(x)
=
1
f(x)+
1
g(x)1
f(x)g(x)
.
Alternativamente, si puo tenere presente che, per ogni x ∈ I,
f(x) + g(x) = f(x)
(1 +
g(x)
f(x)
)= g(x)
(f(x)
g(x)+ 1
).
• Anche le forme indeterminate 1+∞, 00, (±∞)0 possono essere ricon-dotte ai casi gia considerati tenendo presente che, se f : I → R eg : I → R sono funzioni reali e se, per ogni x ∈ I, f(x) > 0 allora, perogni x ∈ I,
f(x)g(x) = eg(x) log(f(x)) .
Una interessante conseguenza della prima regola di L’Hopital riguardala continuita della derivata prima; si puo osservare, infatti, che il limite delrapporto incrementale limx→x0
f(x)−f(x0)x−x0
di una funzione f continua in unpunto x0 si presenta nella forma indeterminata 0/0; applicando il Teorema9.3.1 a tale limite si ottiene il seguente criterio di derivabilita.
Teorema 9.3.3 (Continuita della derivata)Siano I un intervallo di R, x0 ∈ I ed f : I → R una funzione continua inI e derivabile in I " x0. Se esiste il limx→x0 f
′(x), allora f e dotata diderivata in x0 e si ha
f ′(x0) = limx→x0
f ′(x) . (9.3.3)
Dimostrazione. Poiche f e continua in x0, il limite del rapporto incrementale di f in x0
si presenta nella forma indeterminata 0/0. Inoltre, per tale limite sono soddisfatte tutte
le ipotesi del Teorema 9.3.1 e da esso si ottiene la tesi. #
Dal risultato precedente segue che se il limite limx→x0 f′(x) esiste ed e
finito, la funzione f e derivabile in x0 e vale la (9.3.3) (se il limite esiste manon e finito, la funzione risulta solamente dotata di derivata in x0).
Come conseguenza di tale risultato, se la derivabilita di una funzionein un punto non viene assicurata dalle regole di derivazione si puo studiaresemplicemente il limite della derivata prima in tale punto piuttosto che illimite del rapporto incrementale.

9.3 Applicazioni al calcolo dei limiti 237
9.3.2 Formula di Taylor
Sia f : X → R una funzione derivabile in un punto x0 ∈ X di accumulazioneper X; si e visto nella sezione precedente che il grafico di f e dotato di rettatangente nel punto x0 avente equazione
y = f(x0) + f ′(x0)(x− x0) .
Se x ∈ X, la differenza tra il valore della funzione e quello della rettatangente in x e data da f(x)− f(x0)− f ′(x0)(x− x0) e si ha
limx→x0
f(x)− f(x0)− f ′(x0)(x− x0)
x− x0= lim
x→x0
f(x)− f(x0)
x− x0− f ′(x0) = 0 ;
quindi la differenza tra il valore della funzione e quello della retta tangenteal grafico di f in x0 e un infinitesimo di ordine maggiore di 1. Ci si puo orachiedere in modo abbastanza naturale se sia possibile ottenere un’approssi-mazione piu soddisfacente dei valori della funzione considerando polinomidi grado maggiore di 1. I polinomi adatti a tale scopo si ottengono impo-nendo nel punto x0 il valore del polinomio e quello delle sue derivate finoad un ordine fissato uguali rispettivamente al valore della funzione e dellesue derivate nel punto x0 fino allo stesso ordine.
Definizione 9.3.4 Siano X un sottoinsieme di R, x0 ∈ X un punto diaccumulazione per X ed f : X → R una funzione reale derivabile n volte inx0 (n ∈ N). Si dice polinomio di Taylor di f di grado n relativo ad x0 ilpolinomio Tn : R→ R definito ponendo, per ogni x ∈ R,
Tn(x) := f(x0) + f ′(x0)(x− x0) + f ′′(x0)(x− x0)2
2+ (9.3.4)
+ · · ·+ f (n)(x0)(x− x0)n
n!
=n∑
k=0
f (k)(x0)(x− x0)k
k!(9.3.5)
(per k = 0, valgono le convenzioni f (0)(x0) = f(x0) e (x − x0)0 = 1 sex = x0).1
Il polinomio T0 si riduce alla funzione costante di costante valore f(x0),mentre T1 fornisce l’equazione della retta tangente al grafico di f in x0.
1Se occorre specificare la funzione f alla quale si riferisce il polinomio di Taylor Tn
viene preferita la notazione Tn(f) e se occorre specificare anche il punto x0 si usa lanotazione Tn(f, x0).

238 Capitolo 9: Calcolo differenziale
Si riconosce facilmente che, per ogni k, p ∈ N,
Dp((x− x0)k) =
⎧⎨
⎩
k(k − 1) · · · (k − p+ 1)(x− x0)k−p , p < k ,k! , p = k ; ,0 , p > k ,
(9.3.6)e conseguentemente, per ogni k = 0, . . . , n,
T (k)n (x0) = f (k)(x0) . (9.3.7)
Si osserva ancora che, per induzione su j = 0, . . . , n, dalla (9.3.6) siriconosce facilmente la validita della formula
Tn(f)(j) = Tn−j(f
(j)) , (9.3.8)
cioe la derivata j-esima del polinomio di Taylor di ordine n della funzionef in x0 coincide con il polinomio di Taylor di ordine n − j della derivataj-esima di f in x0.
Ad esempio, si consideri la funzione f(x) := x sinx, x ∈ R ed il puntoiniziale x0 = 0; si ha, per ogni x ∈ R,
T1(x) = 0 , T6(x) = T7(x) = x2 − x4
6 + x6
120 ,
T2(x) = T3(x) = x2 , T8(x) = T9(x) = x2 − x4
6 + x6
120 −x8
5040 ,
T4(x) = T5(x) = x2 − x4
6 , T10(x) = x2 − x4
6 + x6
120 −x8
5040 + x10
362880 ;
nella Figura 9.4 viene tracciato approssimativamente il grafico di T2, T4, T6,T8 e T10 = x2 − x4/6 + x6/120 − x8/5040 + x10/362880) e si puo notarecome i polinomi di Taylor approssimino in maniera sempre piu accurata lafunzione assegnata in un intorno del punto 0.
Tale aspetto dei polinomi di Taylor viene messo in evidenza nel risultatoseguente.
Teorema 9.3.5 (Formula di Taylor con il resto di Peano)Siano I un intervallo, x0 ∈ I ed f : I → R una funzione reale derivabile nvolte in x0 ed n− 1 volte in I " x0 con n ≥ 1.
Allora esiste una funzione σn : I → R tale che, per ogni x ∈ I,
f(x) = Tn(x) + σn(x)(x− x0)n
n!, (9.3.9)
ed inoltrelim
x→x0
σn(x) = 0 . (9.3.10)
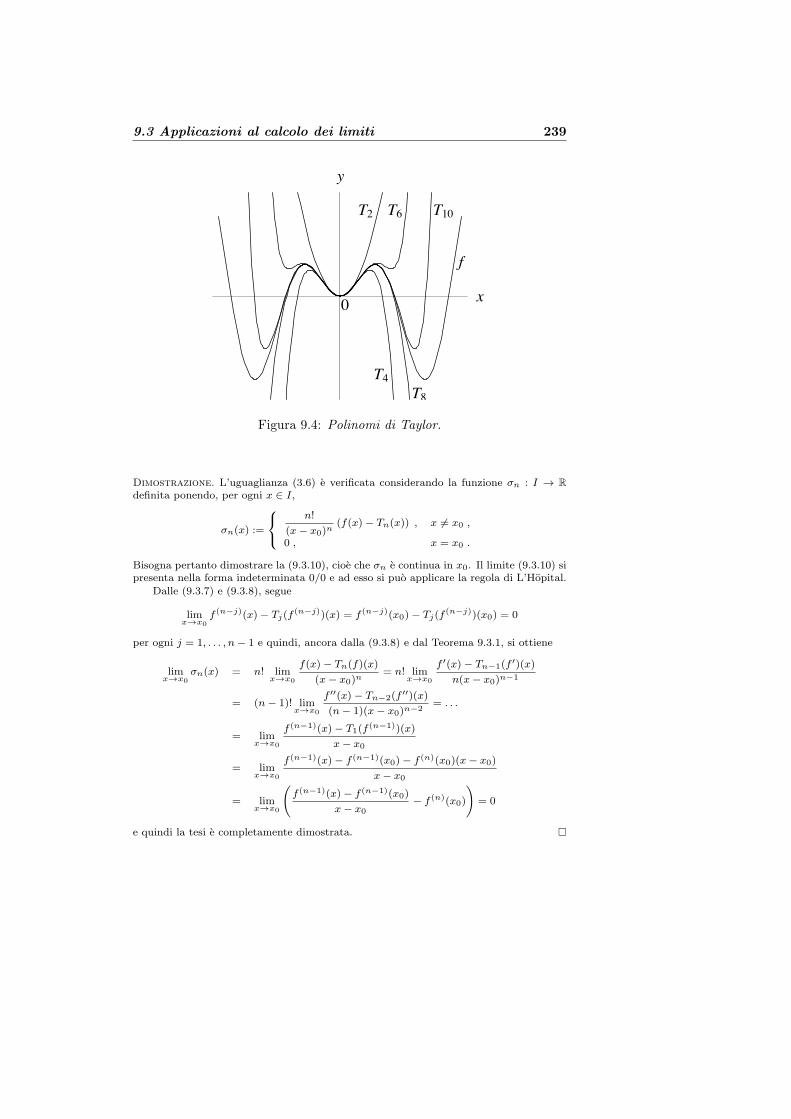
9.3 Applicazioni al calcolo dei limiti 239
x
y
f
T2
0
T6 T10
T4T8
Figura 9.4: Polinomi di Taylor.
Dimostrazione. L’uguaglianza (3.6) e verificata considerando la funzione σn : I → Rdefinita ponendo, per ogni x ∈ I,
σn(x) :=
⎧⎨
⎩
n!
(x− x0)n(f(x)− Tn(x)) , x = x0 ,
0 , x = x0 .
Bisogna pertanto dimostrare la (9.3.10), cioe che σn e continua in x0. Il limite (9.3.10) sipresenta nella forma indeterminata 0/0 e ad esso si puo applicare la regola di L’Hopital.
Dalle (9.3.7) e (9.3.8), segue
limx→x0
f (n−j)(x)− Tj(f(n−j))(x) = f (n−j)(x0)− Tj(f
(n−j))(x0) = 0
per ogni j = 1, . . . , n− 1 e quindi, ancora dalla (9.3.8) e dal Teorema 9.3.1, si ottiene
limx→x0
σn(x) = n! limx→x0
f(x)− Tn(f)(x)
(x− x0)n= n! lim
x→x0
f ′(x)− Tn−1(f ′)(x)
n(x− x0)n−1
= (n− 1)! limx→x0
f ′′(x)− Tn−2(f ′′)(x)
(n− 1)(x− x0)n−2= . . .
= limx→x0
f (n−1)(x)− T1(f (n−1))(x)
x− x0
= limx→x0
f (n−1)(x)− f (n−1)(x0)− f (n)(x0)(x− x0)
x− x0
= limx→x0
(f (n−1)(x)− f (n−1)(x0)
x− x0− f (n)(x0)
)= 0
e quindi la tesi e completamente dimostrata. #

240 Capitolo 9: Calcolo differenziale
La formula (9.3.6) viene denominata formula di Taylor di f di puntoiniziale x0 e di ordine n con il resto di Peano. Nel caso in cui x0 = 0, essaviene denominata formula di Mc Laurin di f di ordine n con il resto diPeano e diventa, per ogni x ∈ I,
f(x) =n∑
k=0
f (k)(0)xk
k!+ σn(x)
xn
n!. (9.3.11)
Un modo alternativo di esprimere il resto e espresso nel risultato succes-sivo che rappresenta una generalizzazione del teorema di Lagrange. Per co-modita, se x0 ed x sono numeri reali distinti, conviene denotare con I(x0, x)l’intervallo aperto di estremi x0 ed x, cioe
I(x0, x) :=
]x0, x[ , x0 < x ,]x, x0[ , x < x0 .
Teorema 9.3.6 (Formula di Taylor con il resto di Lagrange)Siano I un intervallo, x0 ∈ I ed f : I → R una funzione reale derivabile nvolte (n ≥ 1) in I " x0 ed n− 1 volte in x0 con f (n−1) continua in x0.
Allora, per ogni x ∈ I " x0, esiste ξ ∈ I(x0, x) tale che
f(x) = Tn−1(x) + f (n)(ξ)(x− x0)n
n!. (9.3.12)
Dimostrazione. Si fissi x ∈ I " x0 e si denoti con I l’intervallo chiuso avente x ed x0
come estremi. Si definisce ora la funzione F : I → R ponendo, per ogni t ∈ I,
F (t) := Tn−1(f, t)(x) +(x− t)n
(x− x0)n(f(x)− Tn−1(f, x0)(x))
=n−1∑
k=0
f (k)(t)(x− t)k
k!+
(x− t)n
(x− x0)n
(f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
).
Dalle ipotesi assunte sulla funzione f , segue che F e continua in I e derivabile in I(x0, x);inoltre
F (x) = Tn−1(f, x)(x) = f(x) ,
F (x0) = Tn−1(f, x0)(x) + (f(x)− Tn−1(f, x0)(x)) = f(x) ,
e quindi, dal Teorema 9.2.1 di Rolle, esiste ξ ∈ I(x0, x) tale che F ′(ξ) = 0. Tenendopresente che, per ogni t ∈ I(x0, x),
F ′(t) = f ′(t) +n−1∑
k=1
(f (k+1)(t)
(x− t)k
k!− f (k)(t)
(x− t)k−1
(k − 1)!
)
−n(x− t)n−1
(x− x0)n
(f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
)
= f ′(t) +n−1∑
k=1
f (k+1)(t)(x− t)k
k!−
n−2∑
k=0
f (k+1)(t)(x− t)k
k!

9.3 Applicazioni al calcolo dei limiti 241
−n(x− t)n−1
(x− x0)n
(f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
)
= f ′(t) + f (n)(t)(x− t)n−1
(n− 1)!− f ′(t)
−n(x− t)n−1
(x− x0)n
(f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
)
= f (n)(t)(x− t)n−1
(n− 1)!−
n(x− t)n−1
(x− x0)n
(f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
)
=n(x− t)n−1
(x− x0)n
(f (n)(t)
(x− x0)n
n!−(f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
)),
si conclude che deve essere
f (n)(ξ)(x− x0)n
n!= f(x)−
n−1∑
k=0
f (k)(x0)(x− x0)k
k!
e da quest’ultima si ottiene la tesi. #
La formula (9.3.12) viene denominata formula di Taylor di f di puntoiniziale x0 e di ordine n con il resto di Lagrange.
Anche in questo caso, se x0 = 0, essa viene denominata formula di McLaurin di f di ordine n con il resto di Lagrange e si scrive nel seguentemodo, per ogni x ∈ I " 0,
f(x) =n−1∑
k=0
f (k)(0)xk
k!+ f (n)(ξ)
xn
n!, (9.3.13)
|ξ| < |x|.Nel caso n = 1, la (9.3.12) si riduce ovviamente al Teorema 9.2.3 di
Lagrange.
Osservazione 9.3.7 La formula di Taylor con il resto di Lagrange consenteanche di valutare l’errore che si commette approssimando una funzione conil polinomio di Taylor di ordine n in un intorno di un punto x0.
Infatti, nelle ipotesi del Teorema 9.3.6 e supposto che f (n) sia limitatain I " x0, allora, posto M := supx∈I!x0 |f
(n)(x)|, per ogni x ∈ I, si ha
|f(x)− Tn−1(x)| ≤M|x− x0|n
n!. (9.3.14)
Conviene a questo punto scrivere la formula di Taylor per alcune funzionielementari.

242 Capitolo 9: Calcolo differenziale
Formula di Taylor per i polinomi
Sia P : R→ R un polinomio di grado n e siano a0, . . . , an ∈ R, con an = 0,tali che P (x) = a0 + · · · + anxn per ogni x ∈ R. Ovviamente, P e unafunzione infinite volte derivabile e si ha P (n)(x) = an per ogni x ∈ R, mentretutte le derivate successive P (k) con k > n sono nulle. Fissato x0 ∈ R, laformula di Taylor di P di ordine n relativa ad x0 con il resto di Lagrange;in questo caso, per ogni x ∈ R, considerato l’elemento ξ ∈ I(x0, x) previstonella (9.3.12), si ha P (n)(ξ) = an = P (n)(x0) e quindi
P (x) =n∑
k=0
P (k)(x0)(x− x0)k
k!
per ogni x ∈ R. Dunque il polinomio P viene completamente determinatodal valore che assume in x0 insieme a quelli delle sue derivate in x0 finoall’ordine n.
Formula di Taylor per le funzioni esponenziali
Sia a > 0, a = 1 e si consideri la funzione esponenziale expa di base a. Talefunzione e infinite volte derivabile e si riconosce facilmente per induzione sun che, per ogni n ∈ N ed x ∈ R, risulta Dn(ax) = ax logn a. In particolare,per ogni n ∈ N, la derivata n-esima della funzione expa assume il valorelogn a nel punto 0; pertanto, la formula di Mc Laurin di expa di ordine n siscrive, per ogni x ∈ R,
ax =n−1∑
k=0
logk axk
k!+ aξ logn a
xn
n!,
con ξ ∈ I(0, x).Inoltre, dalla (9.3.14) si ottiene, per ogni x ∈ R,
∣∣∣∣∣ax −
n−1∑
k=0
logk axk
k!
∣∣∣∣∣ ≤ maxax, 1 | logn a| |x|n
n!.
Nel caso della funzione esponenziale avente come base il numero di Nepero,le formule precedenti diventano, per ogni x ∈ R,
ex =n−1∑
k=0
xk
k!+ eξ
xn
n!,
con ξ ∈ I(0, x) e∣∣∣∣∣e
x −n−1∑
k=0
xk
k!
∣∣∣∣∣ ≤ maxex, 1 |x|n
n!.

9.3 Applicazioni al calcolo dei limiti 243
Formula di Taylor per le funzioni logaritmiche
Sia a > 0 con a = 1 e si consideri la funzione logaritmo loga di base a.Tale funzione e infinite volte derivabile e procedendo per induzione su n, siriconosce che, per ogni n ≥ 1 ed x ∈]0,+∞[,
Dn(loga x) = (−1)n−1 (n− 1)!
xn log a.
In particolare, per ogni n ∈ N, la derivata n-esima della funzione logaassume il valore (−1)n−1(n − 1)!/ log a nel punto 1. Conseguentemente,tenendo presente che loga 1 = 0, la formula di Taylor di loga di ordine nrelativa al punto 1 si scrive, per ogni x ∈]0,+∞[,
loga x =n−1∑
k=1
(−1)k−1
k log a(x− 1)k +
(−1)n−1
nξn log a(x− 1)n ,
con ξ ∈ I(1, x). In varie applicazioni puo essere utile scrivere quest’ultimaformula nella forma seguente, per ogni x ∈]− 1, 1],
loga(1 + x) =n−1∑
k=1
(−1)k−1
k log axk +
(−1)n−1
nξn log axn ;
poiche x ∈]−1, 1], si ha anche |ξ| < |x| e quindi il resto di Lagrange verificala condizione ∣∣∣∣
(−1)n−1
nξn log axn
∣∣∣∣ ≤1
n| log a| .
Formula di Taylor per le funzioni seno e coseno
Procedendo con gli stessi metodi dei casi precedenti, si possono scrivere leformule di Mc Laurin di ordine 2n + 1 e rispettivamente 2n delle funzioniseno e coseno. Tenendo presente che D(sinx) = cosx e D(cosx) = − sinx,si deduce che le derivate di ogni ordine di tali funzioni assumono valoricompresi tra −1 ed 1. Inoltre, nel punto 0 le derivate di ordine pari dellafunzione seno e quelle di ordine dispari della funzione coseno sono nulle.Pertanto le relative formule di Mc Laurin assumono la seguente forma, perogni x ∈ R,
sinx =n−1∑
k=0
(−1)k
(2k + 1)!x2k+1 + θ(x)
x2n+1
(2n+ 1)!,
cosx =n−1∑
k=0
(−1)k
(2k)!x2k + η(x)
x2n
(2n)!,

244 Capitolo 9: Calcolo differenziale
con θ(x) ∈ [−1, 1] ed η(x) ∈ [−1, 1] opportuni.Si ottiene ovviamente, per ogni x ∈ R,
∣∣∣∣∣sinx−n−1∑
k=0
(−1)k
(2k + 1)!x2k+1
∣∣∣∣∣ ≤|x|2n+1
(2n+ 1)!,
∣∣∣∣∣cosx−n−1∑
k=0
(−1)k
(2k)!x2k
∣∣∣∣∣ ≤|x|2n
(2n)!.
Gli esempi precedenti possono essere estesi con gli stessi metodi perscrivere la formula di Taylor di ogni funzione elementare relativa ad unfissato punto x0.
9.3.3 Simboli di Landau e applicazioni della formula diTaylor al calcolo dei limiti
La formula di Taylor puo essere utilizzata alternativamente alle regole diL’Hopital per la risoluzione delle forme indeterminate.
Si introducono innanzitutto alcune notazioni che evidenziano la parteprincipale di un infinitesimo; tali notazioni consistono nell’uso dei simbolidi Landau che vengono introdotti nel modo seguente.
Siano X un sottoinsieme di R, x0 un punto di accumulazione per X edf : X → R, g : X → R due funzioni definite in X.
Si dice che “f(x) e o piccolo di g(x) per x tendente verso x0” e si scrive
f(x) = o(g(x)) , x→ x0 ,
se limx→x0
f(x)
g(x)= 0 (se f e g sono infinitesime in x0, cio equivale al fatto che
f e un infinitesimo in x0 di ordine maggiore di g).Inoltre, si dice che “f(x) e o grande di g(x) per x tendente verso x0” e
si scrivef(x) = O(g(x)) , x→ x0 ,
se il rapportof(x)
g(x)e limitato in un intorno di x0 (se f e g sono infinitesime
in x0, cio equivale al fatto che f e un infinitesimo in x0 di ordine maggioreo uguale di g).
Tali notazioni consentono di scrivere in modo piu semplice diverse for-mule evitando l’introduzione di funzioni che denotano infinitesimi di ordinesuperiore.
Ad esempio, la formula di Taylor (9.3.9) si puo scrivere
f(x) = Tn(x) + o((x− x0)n) , x→ x0 ,

9.3 Applicazioni al calcolo dei limiti 245
in quanto σn(x)(x− x0)n/n! = o((x− x0)n) per x→ x0.In modo analogo, nelle ipotesi dell’Osservazione 9.3.7, la (9.3.14) diventa
f(x)− Tn−1(x) = O((x− x0)n) , x→ x0 ,
in quanto M(x− x0)n/n! = O((x− x0)n) per x→ x0.Si lascia per esercizio lo sviluppo delle funzioni elementari utilizzando
i simboli di Landau e le formule di Mc Laurin con il resto di Peano; adesempio,
ex =n∑
k=0
xk
k!+ o(xn) , x→ 0 ,
loga(1 + x) =n∑
k=1
(−1)k−1
k log axk + o(xn) , x→ 0 ,
sinx =n∑
k=0
(−1)k
(2k + 1)!x2k+1 + o(x2n+1) , x→ 0 ,
cosx =n∑
k=0
(−1)k
(2k)!x2k + o(x2n) , x→ 0 .
Nel calcolo dei limiti e spesso conveniente utilizzare la formula di Tay-lor per esprimere un infinitesimo in maniera equivalente mediante funzionipotenza; a tal fine e sufficiente considerare la prima derivata non nulla dellefunzioni in esame nel punto x0; ad esempio, le prime derivate della funzionef(x) := arcsin2(x) nel punto 0 sono date da
f(0) = 0 , f ′(0) = 0 , f ′′(0) = 2
e quindi f(x) = 2x2/2! + o(x2) = x2 + o(x2) per x → 0; quindi f(x) ∼ x2
per x→ 0.
Si considera come esempio lo studio del limite
limx→0
x− arcsinx
sinx− arcsinx.
Si determinano dapprima le derivate della funzione f(x) := x− arcsinx nelpunto 0 al fine di trovarne la prima non nulla. Si ha
f(0) = 0 , f ′(0) = 0 , f ′′(0) = 0 , f ′′′(0) = −1
e quindi il numeratore e un infinitesimo di ordine 3 equivalente a −x3/3!(infatti f(x) = −x3/3! + o(x3)).

246 Capitolo 9: Calcolo differenziale
Si procede ora in maniera analoga per la funzione g(x) := sinx−arcsinxe si ha
g(0) = 0 , g′(0) = 0 , g′′(0) = 0 , g′′′(0) = −2
e quindi il denominatore e un infinitesimo di ordine 3 equivalente a −2x3/3!(infatti g(x) = −2x3/3! + o(x3)).
Allora, dalla regola di sostituzione Proposizione 6.10.5, si ha
limx→0
x− arcsinx
sinx− arcsinx= lim
x→0
−x3/3!
−2x3/3!=
1
2.
Si vuole approssimare il numero di Nepero con un errore minore di1/100. Applicando la stima gia ottenuta nel punto x = 1, si ha, per ognin ≥ 1, ∣∣∣∣∣e−
n−1∑
k=0
1
k!
∣∣∣∣∣ ≤e
n!<
3
n!.
Pertanto, bisogna trovare n ≥ 1 tale che 3/n! < 1/100 e quindi bastaconsiderare, ad esempio, n = 6. Il valore approssimato richiesto e quindidato da
e ∼5∑
k=0
1
k!= 1 + 1 + +
1
2+
1
6+
1
24+
1
120=
163
60∼ 2, 71667 .
9.4 Applicazioni allo studio del grafico dellefunzioni reali
Nella presente sezione verranno esaminate innanzitutto le connessioni trail segno della derivata prima e la monotonia di una funzione; verranno poistudiate ulteriori proprieta delle funzioni reali quali la convessita, la con-cavita ed i punti di flesso e la loro connessione con lo studio della derivataseconda.
Inoltre si definiscono gli asintoti verticali, orizzontali ed obliqui al graficodi una funzione reale e se ne studia l’esistenza.
Infine, viene descritto il metodo generale per lo studio del grafico di unafunzione reale.
9.4.1 Monotonia e massimi e minimi relativi ed assoluti
Poiche la nozione di derivata ha carattere locale, trattandosi di un limite,si possono ottenere in maniera diretta alcune connessioni tra il segno della

9.4 Applicazioni allo studio del grafico delle funzioni reali 247
derivata prima in un punto e la crescenza e decrescenza della funzione nellostesso punto.
Proposizione 9.4.1 Siano X un sottoinsieme di R, x0 ∈ X un punto diaccumulazione per X ed f : X → R una funzione reale derivabile in x0. Siha
1) Se f ′(x0) > 0 (rispettivamente, f ′(x0) < 0), allora f e strettamentecrescente (rispettivamente, strettamente decrescente) in x0.
2) Se f e crescente (rispettivamente, decrescente) in x0, allora f ′(x0) ≥ 0(rispettivamente, f ′(x0) ≤ 0).
Dimostrazione. 1) Dalla proprieta di permanenza del segno per i limiti, esiste δ > 0 taleche, per ogni x ∈ X " x0,
x0 − δ < x < x0 + δ =⇒f(x)− f(x0)
x− x0> 0 .
Pertanto il numeratore ed il denominatore del rapporto incrementale devono avere lostesso segno, da cui
x0 < x < x0 + δ =⇒ f(x)− f(x0) > 0 =⇒ f(x0) < f(x) ,
x0 − δ < x < x0 =⇒ f(x)− f(x0) < 0 =⇒ f(x) < f(x0) ,
e quindi f e strettamente crescente in x0. Il caso rispettivo si dimostra in manieraanaloga.
2) Si supponga che f sia crescente in x0. Se fosse, per assurdo, f ′(x0) < 0, dal caso
1) appena dimostrato seguirebbe che f e strettamente decrescente in x0 e si avrebbe una
contraddizione. Il caso rispettivo e analogo. #
Una prima conseguenza della Proposizione 9.4.1 riguarda una condizionenecessaria per massimi e minimi relativi di una funzione.
Corollario 9.4.2 (Condizione necessaria per massimi e minimi re-lativi) Siano X un sottoinsieme di R, x0 ∈ X un punto di accumulazione asinistra e a destra per X ed f : X → R una funzione reale derivabile in x0.Se x0 e un punto di massimo o di minimo relativo per f , allora f ′(x0) = 0.
Dimostrazione. Si supponga per assurdo che f ′(x0) > 0. Dalla Proposizione 9.4.1,segue che f e strettamente crescente in x0 e quindi esiste δ1 > 0 tale che, per ognix ∈ X∩]x0 − δ1, x0 + δ1["x0,
x0 < x < x0 + δ1 =⇒ f(x) > f(x0) , x0 − δ1 < x < x0 =⇒ f(x) < f(x0) .
Inoltre, x0 e un punto di massimo (rispettivamente, di minimo) relativo per f e quindiesiste δ2 > 0 tale che, per ogni x ∈ X∩]x0 − δ2, x0 + δ2[,
f(x) ≤ f(x0) (rispettivamente, f(x) ≥ f(x0) ).
Si ponga ora δ = minδ1, δ2; poiche x0 e di accumulazione a destra per X, si puo
considerare x ∈ X∩]x0, x0 + δ[, per il quale si ottiene contemporaneamente f(x) >

248 Capitolo 9: Calcolo differenziale
f(x0) e f(x) ≤ f(x0) e quindi una contraddizione; nel caso rispettivo, poiche x0 e di
accumulazione anche a sinistra, si considera x ∈ X∩]x0 − δ, x0[ e si ricava ancora una
contraddizione. Dunque non puo essere f ′(x0) > 0. In modo analogo si riconosce che la
condizione f ′(x0) < 0 conduce ad una contraddizione e quindi deve essere f ′(x0) = 0. #
Si osservi che nella dimostrazione precedente l’assurdo e derivato dalfatto che il punto x0 e stato supposto di accumulazione sia a sinistra che adestra per X. Infatti, si riconosce facilmente che una funzione che ammetteun massimo o un minimo relativo in un estremo ed e ivi derivabile, non hanecessariamente derivata nulla in tale estremo. Ad esempio, si consideri lafunzione f : [0, 1]→ R definita ponendo, per ogni x ∈ [0, 1], f(x) := x.
Se una funzione f : I → R e definita in un intervallo I, le connessionitra la monotonia globale e locale studiate nell’Osservazione 4.3.4 insiemealla Proposizione 9.4.1 forniscono subito il seguente risultato.
Proposizione 9.4.3 Siano I un intervallo di R ed f : I → R una funzionereale derivabile. Si ha
1. (Caratterizzazione della monotonia) f e crescente (rispettivamente,decrescente) se e solo se verifica la condizione seguente
∀ x0 ∈ I : f ′(x0) ≥ 0 (rispettivamente, f ′(x0) ≤ 0 ). (9.4.1)
2. (Caratterizzazione della stretta monotonia) f e strettamente crescen-te (rispettivamente, strettamente decrescente) se e solo se verifica lacondizione (9.4.1) ed inoltre f ′ non e costantemente nulla in alcunintervallo contenuto in I, cioe
a, b ∈ I , a < b =⇒ ∃ x0 ∈]a, b[ t.c. f ′(x0) = 0 . (9.4.2)
Dimostrazione. 1) Se f e crescente, essa verifica ovviamente la condizione (9.4.1) comeconseguenza della Proposizione 9.4.1. Viceversa, si supponga che, per ogni x0 ∈ I,f ′(x0) ≥ 0. Se f non fosse crescente, esisterebbero due elementi a, b ∈ I con a < btali che f(b) < f(a). Dal Teorema 9.2.3 di Lagrange applicato alla restrizione di fall’intervallo [a, b], si otterrebbe x0 ∈]a, b[ tale che f ′(x0) = (f(b) − f(a))/(b − a) < 0e cio e escluso. Quindi f deve essere crescente. La dimostrazione e analoga nel casorispettivo.2) Se f e strettamente crescente essa e anche crescente e quindi dalla prima parte devesoddisfare la condizione (9.4.1). Se f ′ fosse costantemente uguale a 0 in un intervallo[a, b] ⊂ I, dalla stretta crescenza si avrebbe innanzitutto f(a) < f(b); inoltre, dal Teorema9.2.3 di Lagrange applicato alla restrizione di f all’intervallo [a, b], si otterrebbe x0 ∈]a, b[tale che f ′(x0) = (f(b)−f(a))/(b−a) > 0 e cio e assurdo in quanto deve essere f ′(x0) = 0.Pertanto, anche la condizione (9.4.2) e dimostrata.
Viceversa, dalla (9.4.1) e dalla prima parte dimostrata segue innanzitutto che f e cre-
scente e pertanto e sufficiente dimostrare che essa e anche iniettiva (vedasi la Proposizione
4.3.2). Si supponga, per assurdo, che esistano due elementi a, b ∈ I, con a < b, tali che

9.4 Applicazioni allo studio del grafico delle funzioni reali 249
f(a) = f(b). Dalla monotonia di f , per ogni x ∈ [a, b], si deve avere f(x) = f(a) = f(b);
essendo f costante in [a, b], la sua derivata si annulla nell’intervallo [a, b] e cio contrad-
dice la condizione (9.4.2). Quindi f e iniettiva e cio completa la dimostrazione. Il caso
rispettivo si dimostra in maniera analoga. #
Le caratterizzazioni precedenti non valgono se la funzione non e definitain un intervallo; ad esempio, la derivata della funzione f(x) = −1/x, x ∈R " 0 e strettamente positiva in tutto R " 0, ma la funzione non estrettamente crescente (ad esempio, −1 < 1 ma f(−1) > f(1)).
Le caratterizzazioni ottenute possono comunque essere sempre applicatealle restrizioni della funzione ad ogni intervallo contenuto nell’insieme didefinizione.
Nella dimostrazione della seconda parte della proposizione precedente,si e visto anche che se f : I → R ha derivata costantemente nulla in unintervallo I, allora essa e costante.
Anche in questo caso la tesi risulta falsa se la funzione non e definita in unintervallo; ad esempio, si consideri la funzione f(x) = x/|x| con x ∈ R"0.
Si studiano ora alcune condizioni sufficienti per i punti di massimo eminimo relativo.
Il primo criterio segue direttamente dalla Proposizione 9.4.1.
Proposizione 9.4.4 (Primo criterio per massimi e minimi relativi)Siano X un sottoinsieme di R, x0 ∈ X un punto interno ad X ed f :X → R una funzione reale continua in x0 e derivabile in un intorno di x0
tranne al piu nel punto x0, cioe esiste δ > 0 tale che f sia derivabile in]x0 − δ, x0 + δ["x0.2
Se
∀ x ∈]x0 − δ, x0[: f ′(x) ≥ 0 , ∀ x ∈]x0, x0 + δ[: f ′(x) ≤ 0
(oppure rispettivamente,
∀ x ∈]x0 − δ, x0[: f ′(x) ≤ 0 , ∀ x ∈]x0, x0 + δ[: f ′(x) ≥ 0) ),
allora x0 e un punto di massimo (rispettivamente, di minimo) relativo perf .
Se, in piu, esiste δ > 0 tale che f ′(x) = 0 per ogni x ∈]x0 − δ, x0 +δ["x0, allora x0 e un punto di massimo (rispettivamente, di minimo)relativo proprio per f .
2Un punto x0 si dice interno ad X se esiste δ > 0 tale che ]x0 − δ, x0 + δ[⊂ X, inaltri termini se X e un intorno di x0. Un punto interno ad X e sempre ovviamente diaccumulazione per X. Nelle ipotesi di derivabilita di f si e pertanto supposto lecitamenteche ]x0 − δ, x0 + δ[⊂ X.

250 Capitolo 9: Calcolo differenziale
Dimostrazione. Dalle ipotesi fatte, tenendo conto della Proposizione 9.4.3, 1), segue chef e crescente in ]x0 − δ, x0[ e decrescente in ]x0, x0 + δ[ (rispettivamente, f e decrescentein ]x0 − δ, x0[ e crescente in ]x0, x0 + δ[); dal Teorema 6.6.1 sul limite delle funzionimonotone e tenendo presente che f e continua in x0, si ha
f(x0) = supx∈]x0−δ,x0[
f(x) = supx∈]x0,x0+δ[
f(x)
(rispettivamente,
f(x0) = infx∈]x0−δ,x0[
f(x) = infx∈]x0,x0+δ[
f(x) ).
Pertanto, per ogni x ∈]x0 − δ, x0 + δ["x0, risulta f(x) ≤ f(x0) (rispettivamente,f(x0) ≤ f(x)) e quindi x0 e un punto di massimo relativo (rispettivamente, di minimorelativo) per f .
Per quanto riguarda l’ultima parte della tesi, se il punto x0 non fosse un punto di
massimo (rispettivamente, di minimo) relativo proprio per f , esisterebbe x1 ∈]x0−δ, x0+
δ["x0 tale che f(x1) = f(x0); applicando il Teorema 9.2.1 di Rolle alla restrizione di
f all’intervallo chiuso di estremi x0 ed x1, si troverebbe x ∈ I(x0, x1) tale che f ′(x) = 0
contraddicendo le ipotesi assunte nell’ultima parte. #
Proposizione 9.4.5 (Secondo criterio per massimi e minimi relati-vi)Siano X un sottoinsieme di R, x0 ∈ X un punto interno ad X ed f : I → Runa funzione reale derivabile due volte in x0.
Se f ′(x0) = 0 e f ′′(x0) < 0 (rispettivamente, f ′′(x0) > 0), allora x0 eun punto di massimo (rispettivamente, di minimo) relativo proprio per f .
Dimostrazione. Poiche f e derivabile due volte in x0, deve innanzitutto esistere unintorno J di x0 tale che f sia derivabile in J (si e supposto lecitamente J ⊂ X in quantox0 e interno ad X); inoltre, la condizione f ′′(x0) < 0 (rispettivamente, f ′′(x0) > 0)comporta, dalla Proposizione 9.4.1, che f ′ sia strettamente decrescente (rispettivamente,strettamente crescente) in x0 e quindi deve esistere δ > 0 tale che ]x0 − δ, x0 + δ[⊂ J e,per ogni xx0,
x < x0 =⇒ f ′(x0) < f ′(x) (rispettivamente, f ′(x) < f ′(x0) ),
x > x0 =⇒ f ′(x) < f ′(x0) (rispettivamente, f ′(x0) < f ′(x) ).
Tenendo presente che f ′(x0) = 0, le condizioni precedenti consentono di applicare la Pro-
posizione 9.4.4 e concludere che x0 e un punto di massimo (rispettivamente, di minimo)
relativo proprio per f . #
Corollario 9.4.6 Siano X un sottoinsieme di R, x0 ∈ X un punto internoad X ed f : X → R una funzione reale derivabile due volte in x0. Se x0
e un punto di massimo (rispettivamente, di minimo) relativo per f , alloradeve essere f ′′(x0) ≤ 0 (rispettivamente, f ′′(x0) ≥ 0).

9.4 Applicazioni allo studio del grafico delle funzioni reali 251
Dimostrazione. Infatti, se fosse f ′′(x0) > 0 (rispettivamente, f ′′(x0) < 0), dalla Propo-
sizione 9.4.5 precedente e dal Corollario 9.4.2, x0 sarebbe un punto di minimo (rispetti-
vamente, di massimo) relativo proprio per f . #
Se un punto interno x0 ∈ X e di massimo (rispettivamente, di minimo)relativo per f e se f : X → R e derivabile due volte in x0, dai Corollari9.4.2 e 9.4.6 seguono entrambe le condizioni
f ′(x0) = 0 , f ′′(x0) ≤ 0 (rispettivamente, f ′′(x0) ≥ 0 ).
Esse non sono tuttavia sufficienti ad assicurare che un punto x0 sia di mas-simo (rispettivamente, di minimo) relativo per f . Ad esempio, la funzio-ne f(x) = x3, x ∈ R, nel punto 0 verifica la condizione precedente ma estrettamente crescente in 0.
Si osserva inoltre che i criteri esposti non valgono in generale se il puntox0 non e interno ad X; ad esempio, la funzione f : [0, 1] → R definitaponendo, per ogni x ∈ [0, 1], f(x) := x2 ha derivata seconda strettamentepositiva nel punto di minimo 0, ma anche nel punto di massimo 1.
Infine, nei casi in cui sia la derivata prima che seconda di una funzionesi annullino, puo essere utile il seguente ulteriore criterio che si deduce dallaformula di Taylor.
Proposizione 9.4.7 (Terzo criterio per massimi e minimi relativi)Siano I un intervallo di R, x0 ∈ I ed f : I → R una funzione reale derivabilen volte in x0, con n ≥ 2 e si supponga che
∀ k = 1, . . . , n− 1 : f (k)(x0) = 0 , f (n)(x0) = 0 .
Allora
1. Se n e dispari e f (n)(x0) > 0, allora f e strettamente crescente in x0,mentre se f (n)(x0) < 0, allora f e strettamente decrescente in x0.
2. Se n e pari e f (n)(x0) > 0, allora x0 e un punto di minimo relativoproprio per f , mentre se f (n)(x0) < 0, allora x0 e un punto di massimorelativo proprio per f .
Dimostrazione. Poiche f e derivabile n volte in x0, si puo supporre che la derivatadi ordine n − 1 di f sia definita in un intervallo I ∩ J , con J intorno opportuno dix0. Applicando la formula di Taylor (Teorema 9.3.5) alla restrizione di f a I ∩ J sitrova una funzione σn : I ∩ J → R tale che limx→x0 σn(x) = 0 e, per ogni x ∈ I ∩ J ,f(x) = Tn(x) + σn(x)(x− x0)n/n!, dove Tn denota il polinomio di Taylor di ordine n dif relativo ad x0; dalle ipotesi e dalla definizione di Tn segue, per ogni x ∈ I ∩ J ,
f(x)− f(x0) =(x− x0)n
n!(f (n)(x) + σn(x)) . (1)

252 Capitolo 9: Calcolo differenziale
Poiche limx→x0 σn(x) = 0 e |f (n)(x)| > 0, si puo trovare δ > 0 tale che I∩]x0−δ, x0+δ[⊂I ∩ J e inoltre, per ogni x ∈ I∩]x0 − δ, x0 + δ[,
|σn(x)| <|f (n)(x)|
2. (2)
Se f (n)(x) > 0, dalla (2) si ottiene, per ogni x ∈ I∩]x0 − δ, x0 + δ[,
−f (n)(x)
2< σn(x) <
f (n)(x)
2
e conseguentemente
0 <f (n)(x)
2< f (n)(x) + σn(x) <
3 f (n)(x)
2
mentre, se f (n)(x) < 0, sempre dalla (2) si ottiene, per ogni x ∈ I∩]x0 − δ, x0 + δ[,
f (n)(x)
2< σn(x) < −
f (n)(x)
2
e quindi3 f (n)(x)
2< f (n)(x) + σn(x) <
f (n)(x)
2< 0 .
Da cio, e tenendo presente che il termine (x−x0)n e sempre positivo per n pari, mentre e
positivo in [x0,+∞[ e negativo in ]−∞, x0] per n dispari, dalla (1) si ottiene interamente
la tesi. #
Osservazione 9.4.8 Massimi e minimi relativi di una funzione. I criteriforniti sopra consentono di individuare i punti di massimo e di minimo rela-tivo di una funzione nel caso in cui essi siano interni all’insieme di definizionee la funzione sia derivabile una o piu volte in tali punti. Per determinaretutti i punti di massimo e di minimo relativo di una funzione occorre per-tanto tenere conto anche dei punti estremi in cui la funzione e definita e deipunti in cui la funzione non e derivabile.
Pertanto, se f : X → R e una funzione reale definita in un sottoinsiemeX di R, si puo procedere nel modo seguente:
1. Si determina l’insieme X ′ = x0 ∈ X |f e derivabile in x0 dei punti incui la funzione e derivabile. Per il Corollario 9.4.2, i punti di massimoe di minimo relativo appartenenti ad X ′ e di accumulazione a sinistrae a destra per X devono soddisfare l’equazione
f ′(x) = 0 , x ∈ X ′ .
Pertanto, conviene determinare l’insieme X0 delle soluzioni di taleequazione. In generale accade che X0 e un sottoinsieme finito (inqualche caso numerabile) di R.
9.4 Applicazioni allo studio del grafico delle funzioni reali 253
2. Non e detto che un elemento x0 ∈ X0 sia un punto di massimo o diminimo relativo per f in quanto la condizione f ′(x0) = 0 e solamentenecessaria. Quindi occorre verificare se ognuno degli elementi di X0 eeffettivamente un punto di massimo o di minimo relativo per f utiliz-zando i criteri esposti nelle Proposizioni 9.4.4, 9.4.5 ed eventualmente9.4.7. Se l’applicazione di tali criteri non consente di concludere seun punto e effettivamente di massimo o di minimo relativo occorreprocedere ad una verifica diretta mediante la definizione di punto dimassimo e di minimo relativo.
3. Bisogna considerare i punti esclusi nei casi precedenti, che sono gli ele-menti diX che non appartengono adX ′ (cioe in cui f non e derivabile)e gli elementi di X che non sono di accumulazione a sinistra e a destraper X (in generale gli estremi appartenenti ad X degli intervalli di cuiX e costituito). Tali punti si presentano solitamente in numero finito(in qualche caso numerabile) e per ognuno di essi bisogna verificarein maniera diretta se si tratta di un punto di massimo o di minimorelativo per f . Per quanto riguarda i punti in cui la funzione non ederivabile conviene osservare che se in uno di tali punti la funzione econtinua ed il punto e angoloso o cuspidale, il primo criterio potrebbecomunque assicurare se si tratta o meno di un punto di massimo o mi-nimo relativo; ad esempio, in un punto angoloso i segni delle derivatedestre e sinistre descrivono precisamente il punto (se la derivata sini-stra e quella destra sono entrambe positive in un punto x0 la funzionee strettamente crescente in x0, se sono entrambe negative la funzionee strettamente decrescente in x0, se la derivata sinistra e positiva equella destra e negativa il punto x0 e di massimo relativo per f edinfine se la derivata sinistra e negativa e quella destra e positiva ilpunto x0 e di minimo relativo per f).
Osservazione 9.4.9 Massimi e minimi assoluti di una funzione. La di-scussione precedente consente in generale di individuare tutti i punti dimassimo e di minimo relativo per una funzione. Ci si puo porre a questopunto il problema della determinazione degli eventuali punti di massimo odi minimo assoluto per f . A tale proposito, bisogna innanzitutto osservareche in generale non e detto che tali punti esistano a meno che la funzionenon sia continua in un sottoinsieme chiuso e limitato di R (in tal caso l’esi-stenza del massimo e del minimo assoluto di f viene assicurata dal teoremadi Weierstrass e per determinare il massimo o il minimo assoluto di f e suf-ficiente confrontare i valori della funzione nei punti di massimo o di minimorelativo). In generale, per determinare tali eventuali punti si confrontanodapprima i valori della funzione in tutti i punti di massimo e di minimorelativo (eventuali); si studia poi il comportamento della funzione in tutti i

254 Capitolo 9: Calcolo differenziale
punti di accumulazione in cui non e definita oppure in cui e definita ma none continua (in effetti, con l’estremo superiore o con l’estremo inferiore se fe limitata superiormente o inferiormente; in caso contrario, evidentementef non puo essere dotata di massimo o di minimo). Dal confronto, poi, sipotra dedurre se il massimo ed il minimo assoluto della funzione esistono e,in caso affermativo, potranno anche essere determinati.
Ad esempio, si studiano la monotonia e gli eventuali punti di massimoe di minimo relativo ed assoluto della funzione
f(x) := x2 + |x− 3| .
La funzione e definita in tutto R ed e derivabile nell’insieme R " 3;per ogni x ∈ R" 3, si ha
f ′(x) = 2x+|x− 3|x− 3
=
2x+ 1 , x > 3 ,2x− 1 , x < 3 .
dunque la derivata e strettamente positiva in ]1/2,+∞["3 e strettamentenegativa in ] − ∞, 1/2[; poiche f e continua nel punto 3, da cio segue di-rettamente che f e strettamente crescente negli intervalli [1/2, 3] e [3,+∞[(quindi in [1/2,+∞[) ed e strettamente decrescente in ] − ∞, 1/2]. Nelpunto 3 la funzione non e derivabile in quanto f ′
+(3) = limx→3+ f ′(x) = 7mentre f ′
−(3) = limx→3− f ′(x) = 5. Inoltre, il punto 1/2 e di minimo perla funzione e si ha f(1/2) = 11/4. Per quanto riguarda gli eventuali puntidi massimo e di minimo assoluto si osserva che agli estremi dell’insieme didefinizione si ha limx→+∞ f(x) = +∞ e limx→−∞ f(x) = −∞; quindi fnon e limitata superiormente e conseguentemente non e dotata di massimomentre il punto 1/2 e il punto di minimo assoluto della funzione (il minimoassoluto e uguale a 11/4).
9.4.2 Convessita, concavita e flessi
Le proprieta introdotte nel presente paragrafo costituiscono un ulteriorestrumento per lo studio delle funzioni reali.
Le proprieta sulle quali ci si soffermera saranno quelle di convessita econcavita di una funzione. Parallelamente a quanto visto per la crescenza ela decrescenza, anche queste ultime possono essere introdotte globalmenteed in un punto; la nozione legata al calcolo differenziale e quella localema in intervalli le due nozioni coincidono; per tale motivo ci si soffermerafin dall’inizio sulla nozione locale. Tuttavia, al solo fine della completezza,conviene precisare che una funzione f : I → R definita in un intervallo I sidice convessa (rispettivamente, concava) se considerati due qualsiasi punti

9.4 Applicazioni allo studio del grafico delle funzioni reali 255
x1, x2 ∈ I con x1 < x2, il suo grafico nell’intervallo ]x1, x2[ si trova al disotto (rispettivamente, al di sopra) di quello della retta secante il grafico di fnei punti (x1, f(x1)) e (x2, f(x2)). La retta passante per i punti (x1, f(x1))e (x2, f(x2)) ha equazione
y − f(x1)
x− x1=
f(x2)− f(x1)
x2 − x1
cioe
y = f(x1) +f(x2)− f(x1)
x2 − x1(x− x1)
e tenendo presente che gli elementi dell’intervallo x ∈]x1, x2[ possono esserescritti nella forma x = λx2 + (1 − λ)x1 l’equazione della retta consideratadiventa
y = f(x2) + λ(f(x2)− f(x1))
cioe y = λ f(x2) + (1 − λ)f(x1); conseguentemente, la funzione f risultaconvessa (rispettivamente, concava) se e solo se, per ogni x1, x2 ∈ I e perogni λ ∈]0, 1[, risulta
f(λx2 + (1− λ)x1) ≤ λ f(x2) + (1− λ)f(x1)
(rispettivamente,
f(λx2 + (1− λ)x1) ≥ λ f(x2) + (1− λ)f(x1) ).
Inoltre la funzione f si dice strettamente convessa (rispettivamente,strettamente concava) se le condizioni precedenti valgono con una disegua-glianza stretta, cioe se
f(λx2 + (1− λ)x1) < λ f(x2) + (1− λ)f(x1)
(rispettivamente,
f(λx2 + (1− λ)x1) < λ f(x2) + (1− λ)f(x1)).
La definizione precedente vale per qualsiasi funzione definita in un inter-vallo senza richiedere proprieta di derivabilita. Tuttavia, per riconoscere lavalidita di tali proprieta puo essere utilizzato il calcolo differenziale introdu-cendo anche una nozione locale di convessita e di concavita. In questo modosi possono ottenere proprieta e legami con il calcolo differenziale in manieraabbastanza simile a quanto svolto per i concetti di crescenza, decrescenza emassimi e minimi relativi.
Si considera pertanto la seguente definizione locale.

256 Capitolo 9: Calcolo differenziale
Definizione 9.4.10 Sia X un sottoinsieme di R e siano x0 ∈ X un puntodi accumulazione per X ed f : X → R una funzione reale derivabile in x0.Si dice che f e convessa (rispettivamente, concava) in x0 se esiste δ > 0tale che, per ogni x ∈ X∩]x0 − δ, x0 + δ[,
f(x0)+f ′(x0)(x−x0) ≤ f(x) (rispettivamente, f(x) ≤ f(x0)+f ′(x0)(x−x0)).
Inoltre, si dice che f e strettamente convessa (rispettivamente, strettamenteconcava) in x0 se esiste δ > 0 tale che, per ogni x ∈ X∩]x0−δ, x0+δ["x0,
f(x0)+f ′(x0)(x−x0) < f(x) (rispettivamente, f(x) < f(x0)+f ′(x0)(x−x0)).
Infine, si dice che x0 e un punto di flesso ascendente (rispettivamente,discendente) per f se esiste δ > 0 tale che
∀ x ∈ X∩]x0 − δ, x0[: f(x) ≤ f(x0) + f ′(x0)(x− x0) ,
∀ x ∈ X∩]x0, x0 + δ[: f(x0) + f ′(x0)(x− x0) ≤ f(x) ,
(rispettivamente,
∀ x ∈ X∩]x0 − δ, x0[: f(x0) + f ′(x0)(x− x0) ≤ f(x) ,
∀ x ∈ X∩]x0, x0 + δ[: f(x) ≤ f(x0) + f ′(x0)(x− x0) ),
Se la condizione precedente e verificata con una diseguaglianza stretta sidice anche che x0 e un punto di flesso proprio per f .
Se una funzione e convessa (rispettivamente, concava) in un punto x0,si dice anche che f volge la concavita verso l’alto (rispettivamente, verso ilbasso) in x0.
Una funzione convessa (rispettivamente, concava, strettamente convessa,strettamente concava) in tutti i punti di un sottoinsieme A di X viene de-nominata convessa (rispettivamente, concava, strettamente convessa, stret-tamente concava) in A; se l’insieme A non viene precisato e da intendersiA = X.
Pertanto geometricamente una funzione e convessa (rispettivamente,concava) in un punto x0 se in un intorno di x0 il suo grafico si trova aldi sopra (rispettivamente, al di sotto) della retta tangente al grafico in x0;se x0 e un punto di flesso, la retta tangente al grafico in x0 viene anche de-nominata tangente flessionale in x0 oppure tangente di flesso in x0 e in unintorno di un punto di flesso, il grafico della funzione si trova da un lato aldi sotto e dall’altro al di sopra (oppure viceversa) della tangente flessionale.Per convenzione, si puo continuare a denominare punto di flesso ascendente(rispettivamente, discendente) anche un elemento x0 ∈ X in cui f e dotata

9.4 Applicazioni allo studio del grafico delle funzioni reali 257
di derivata uguale a −∞− (rispettivamente, +∞). In tal caso, la tangenteflessionale e una retta verticale di equazione x = x0.
Nella Figura successiva 9.5 viene rappresentata una funzione f convessain un punto x0, concava in un punto x1, ed un punto x2 di flesso per f .
x
y
0x0 x1 x2
Figura 9.5: Funzione convessa o concava in un punto e punti di flesso.
Si osservi che puo accadere che una funzione sia derivabile in un punto x0
e che non verifichi alcuna delle condizioni previste nella Definizione 9.4.10;ad esempio, la funzione
f(x) :=
x3 sin 1
x , x = 0 ,0 , x = 0 ,
e derivabile in 0 e risulta f ′(0) = 0; conseguentemente, la retta tangente algrafico di f in 0 ha equazione y = 0, mentre la funzione non e ne positivane negativa in alcun intorno di 0.
I criteri maggiormente utilizzati per lo studio della convessita e del-la concavita di una funzione sono collegati allo studio del segno della suaderivata seconda.
Tali criteri sono essenzialmente basati sull’osservazione seguente.
Osservazione 9.4.11 Sia X un sottoinsieme di R e siano x0 ∈ X un puntodi accumulazione per X ed f : X → R una funzione reale; si supponga chela derivata prima di f sia definita in X ∩ I con I intorno di x0 e si considerila funzione φ : X ∩ I → R definita ponendo, per ogni x ∈ X ∩ I,
φ(x) := f(x)− f(x0)− f ′(x0)(x− x0)
258 Capitolo 9: Calcolo differenziale
(φ rappresenta la differenza tra la funzione f e la retta tangente al graficodi f nel punto x0).
Allora valgono le seguenti proprieta:
1. f e convessa (rispettivamente, strettamente convessa, concava, stret-tamente concava) in x0 se e solo se il punto x0 e di minimo relativo(rispettivamente, di minimo relativo proprio, di massimo relativo, dimassimo relativo proprio) per φ.
2. Il punto x0 e un flesso ascendente (rispettivamente, un flesso ascenden-te proprio, un flesso discendente, un flesso discendente proprio) per fse e solo se φ e decrescente (rispettivamente, strettamente decrescente,crescente, strettamente crescente) in x0.
(Basta tenere presente le definizioni adottate e che φ(x0) = 0, da cui segue che φ e
positiva (rispettivamente, negativa) in un intorno di x0 se e solo se x0 e di minimo
(rispettivamente, di massimo) relativo per φ. #)
Dall’osservazione precedente, la proprieta di convessita, di concavita inun punto per la funzione f viene ricondotta alla proprieta di minimo e dimassimo relativo per la funzione φ e analogamente i punti di flesso per fvengono ricondotti alla proprieta di crescenza e decrescenza di φ. Si tengainoltre presente che φ e derivabile in X ∩ I e che, per ogni x ∈ X ∩ I, risultaφ′(x) = f ′(x)− f ′(x0) e in particolare φ′(x0) = 0. Quanto osservato si puochiaramente applicare nel caso in cui la funzione f sia dotata di derivataseconda in x0, in quanto cio comporta che essa deve essere necessariamentederivabile in X ∩ I, con I intorno opportuno di x0. In tal caso, inoltre,φ risulta anch’essa derivabile due volte in x0 e si ha φ′′(x0) = f ′′(x0).Applicando tali proprieta ed i risultati ottenuti nel paragrafo precedentealla funzione φ, si stabiliscono direttamente i seguenti criteri.
Proposizione 9.4.12 Siano X un sottoinsieme di R, x0 ∈ X un punto diaccumulazione per X ed f : X → R una funzione reale derivabile due voltein x0. Allora
1. Se f ′′(x0) > 0 (rispettivamente, f ′′(x0) < 0), allora f e strettamenteconvessa (rispettivamente, strettamente concava) in x0.
2. Se f e convessa (rispettivamente, concava) in x0, allora f ′′(x0) ≥ 0(rispettivamente, f ′′(x0) ≤ 0).
Dimostrazione. 1) Si ha φ′′(x0) > 0 e quindi φ′ e strettamente crescente in x0; poicheφ′(x0) = 0, φ′ deve essere strettamente negativa in un intorno sinistro di x0 e strettamentepositiva in un intorno destro di x0. Dalla Proposizione 9.4.4, il punto x0 e un minimo

9.4 Applicazioni allo studio del grafico delle funzioni reali 259
relativo proprio per φ, e quindi f e strettamente convessa in x0. In modo analogo sistabiliscono i casi rispettivi.
2) Se f e convessa in x0, allora x0 e un punto di minimo relativo per φ; dal Corollario
9.4.2, segue φ′′(x0) ≥ 0 e quindi f ′′(x0) ≥ 0. Il caso rispettivo si stabilisce in maniera
analoga. #
Come conseguenza della Proposizione 9.4.12 si stabilisce una prima con-dizione necessaria per i punti di flesso.
Corollario 9.4.13 (Condizione necessaria per punti di flesso) SianoX un sottoinsieme di R, x0 ∈ X un punto di accumulazione a sinistra e adestra per X ed f : X → R una funzione reale derivabile due volte in x0.Se x0 e un punto di flesso per f , allora necessariamente f ′′(x0) = 0.
Dimostrazione. Si supponga, ad esempio, che x0 sia un punto di flesso ascendente
per f . Se, per assurdo, fosse f ′′(x0) > 0, dalla Proposizione 9.4.12, f risulterebbe
strettamente convessa in x0. Allora, si potrebbe trovare δ > 0 tale che, per ogni x ∈X∩]x0 − δ, x0[, f(x) ≤ f(x0) + f ′(x0)(x − x0) (in quanto x0 e un flesso ascendente) e
f(x) > f(x0) + f ′(x0)(x − x0) (in quanto f e strettamente convessa in x0). Tenendo
presente che l’intersezione X∩]x0 − δ, x0[ e non vuota in quanto x0 e di accumulazione
a sinistra per X, le condizioni precedenti portano ad un assurdo. In modo analogo,
utilizzando il fatto che x0 e di accumulazione anche a destra per X, si deduce che non
puo essere f ′′(x0) < 0 e quindi deve essere f ′′(x0) = 0. #
La condizione f ′′(x0) = 0 puo essere soddisfatta anche quando il puntox0 non e di flesso per f come accade, ad esempio, per la funzione f(x) := x4,x ∈ R, nel punto x0 = 0.
Si deducono ora le seguenti condizioni per lo studio della convessita econcavita in intervalli; la loro dimostrazione viene tralasciata per brevita inquanto segue le stesse linee di quelle gia viste.
Proposizione 9.4.14 Siano I un intervallo di R ed f : I → R una funzionereale derivabile due volte in I. Si ha
1. f e convessa (rispettivamente, concava) se e solo se verifica la condi-zione seguente:
∀ x0 ∈ I : f ′′(x0) ≥ 0 (rispettivamente, ∀ x0 ∈ I : f ′′(x0) ≤ 0 ).(9.4.3)
2. f e strettamente convessa (rispettivamente, strettamente concava) see solo se f verifica la condizione (9.4.3) ed inoltre f ′′ non e costante-mente nulla in alcun intervallo contenuto in I, cioe
a, b ∈ I , a < b =⇒ ∃ x0 ∈]a, b[ t.c. f ′′(x0) = 0 . (9.4.4)

260 Capitolo 9: Calcolo differenziale
Si enunciano infine i criteri maggiormente utilizzati per la determinazio-ne dei punti di flesso di una funzione.
Proposizione 9.4.15 (Primo criterio per i punti di flesso)Siano X un sottoinsieme di R, x0 ∈ X un punto interno ad X ed f : X → Runa funzione reale. Si supponga che esista δ > 0 tale che f sia derivabiledue volte in X∩]x0 − δ, x0 + δ["x0 e inoltre che la derivata prima di fsia continua in x0. Se
∀ x ∈]x0 − δ, x0[: f ′′(x) ≤ 0 , ∀ x ∈]x0, x0 + δ[: f ′′(x) ≥ 0
(oppure rispettivamente,
∀ x ∈]x0 − δ, x0[: f ′′(x) ≥ 0 , ∀ x ∈]x0, x0 + δ[: f ′′(x) ≤ 0) ),
allora x0 e un punto di flesso ascendente (rispettivamente, discendente) perf .
Se, in piu, la derivata seconda di f non si annulla in X∩]x0 − δ, x0 +δ["x0, allora x0 e un punto di flesso proprio per f .
Dimostrazione. Dalla Proposizione 9.4.4, applicata alla derivata prima di f , segue che x0
e un punto di minimo (rispettivamente, di massimo) relativo per f ′ e quindi, per quanto
osservato preliminarmente, anche per φ′, da cui la prima parte della tesi. L’ultima parte
della tesi si ottiene nello stesso modo osservando che in questo caso il punto x0 risulta
un minimo (rispettivamente, un massimo) relativo proprio per f ′ per quanto osservato
nell’ultima parte della Proposizione 9.4.4. #
Proposizione 9.4.16 (Secondo criterio per i punti di flesso)Siano X un sottoinsieme di R, x0 ∈ X un punto interno ad X ed f : I → Runa funzione reale derivabile tre volte in x0. Se f ′′(x0) = 0 e f (3)(x0) > 0(rispettivamente, f (3)(x0) < 0), allora x0 e un punto di flesso ascendente(rispettivamente, discendente) proprio per f .
Dimostrazione. Dalla Proposizione 9.4.5 segue che x0 e un punto di minimo (rispetti-
vamente, di massimo) relativo proprio per f ′ e quindi anche per φ′; allora, la tesi segue
direttamente da quanto osservato preliminarmente. #
Corollario 9.4.17 Siano X un sottoinsieme di R, x0 ∈ X un punto inter-no ad X ed f : X → R una funzione reale derivabile tre volte in x0. Se x0
e un punto di flesso ascendente (rispettivamente, discendente) per f , alloradeve essere f (3)(x0) ≥ 0 (rispettivamente, f (3)(x0) ≤ 0).

9.4 Applicazioni allo studio del grafico delle funzioni reali 261
Dimostrazione. Deve essere innanzitutto f ′′(x0) = 0 per il Corollario 9.4.13. Se, poi, fos-
se f (3)(x0) < 0 (rispettivamente, f (3)(x0) > 0), dalla Proposizione 9.4.16 x0 sarebbe un
punto di flesso discendente (rispettivamente, ascendente) proprio per f , in contraddizione
con le ipotesi. #
Se f : X → R e derivabile tre volte in un punto x0 interno ad X, daiCorollari 9.4.13 e 9.4.17 si ottengono le seguenti condizioni necessarie per ipunti di flesso ascendenti (rispettivamente, discendenti)
f ′′(x0) = 0 , f (3)(x0) ≤ 0 (rispettivamente, f (3)(x0) ≥ 0 ).
Infine, se le derivate seconda e terza di una funzione sono entrambenulle, si puo cercare di utilizzare il seguente ulteriore criterio dedotto dallaformula di Taylor.
Proposizione 9.4.18 (Terzo criterio per i punti di flesso)Siano I un intervallo di R, x0 ∈ I ed f : I → R una funzione reale derivabilen volte in x0, con n ≥ 3 e si supponga che
∀ k = 2, . . . , n− 1 : f (k)(x0) = 0 , f (n)(x0) = 0 .
Allora
1. Se n e dispari e f (n)(x0) > 0, allora x0 e un punto di flesso ascendenteproprio per f , mentre se f (n)(x0) < 0, allora x0 e un punto di flessodiscendente proprio per f .
2. Se n e pari e f (n)(x0) > 0, allora f e strettamente convessa in x0,mentre se f (n)(x0) < 0, allora f e strettamente concava in x0.
Dimostrazione. Basta applicare la Proposizione 9.4.7 alla derivata prima di f , con n−1
al posto di n, tenendo conto delle osservazioni preliminari e del fatto che i punti di minimo
e di massimo per f ′ sono gli stessi della funzione φ′. #
In analogia con l’Osservazione 9.4.8 a proposito dei punti di massimo e diminimo relativo di una funzione, anche ora bisogna ricordare di considerareseparatamente gli eventuali punti di flesso in cui la funzione non e derivabiledue volte; quindi, in generale i punti di flesso vanno ricercati tra le soluzionidell’equazione f ′′(x) = 0 ed i punti in cui la funzione non e derivabiledue volte (tali punti costituiscono di solito un sottoinsieme finito oppurenumerabile dell’insieme di definizione della funzione).
Ad esempio, si studiano la concavita, la convessita e gli eventuali puntidi flesso della funzione
f(x) := x2
(1
20x3 − 5
12x2 +
4
3x− 2
), x ∈ R .

262 Capitolo 9: Calcolo differenziale
La funzione e un polinomio e quindi e infinite volte derivabile; la derivataseconda e data da f ′′(x) = x3 − 5x2 + 8x − 4 = (x − 1)(x − 2)2 ed estrettamente positiva nell’intervallo ]1,+∞["2 e strettamente negativain ]−∞, 1[; pertanto, f e strettamente convessa in [1,+∞[ e strettamenteconcava in ]−∞, 1] e, per il primo criterio per i punti di flesso (Proposizione9.4.15), il punto 1 e un punto di flesso, mentre il punto 2 non lo e; allo stessorisultato si perviene applicando il secondo criterio per i punti di flesso nelpunto 1 ed il terzo criterio nel punto 2.
9.4.3 Asintoti
Le nozioni seguenti possono risultare utili per una descrizione piu dettaglia-ta del comportamento di una funzione reale sia in punti di accumulazionereali nei quali la funzione non e definita oppure non e continua (mediantegli asintoti verticali), sia nei punti +∞ e −∞ nel caso in cui la funzionesia definita in un insieme non limitato superiormente oppure inferiormente(mediante gli asintoti orizzontali oppure obliqui).
Definizione 9.4.19 Siano X un sottoinsieme di R, x0 ∈ R un punto diaccumulazione a destra (rispettivamente, a sinistra) per X ed f : X → Runa funzione reale.
Si dice che la retta di equazione x = x0 e un asintoto verticale a destra(rispettivamente, a sinistra) per f se limx→x+
0f(x) = ±∞, (rispettivamente,
limx→x−0= ±∞).
Piu precisamente, l’asintoto viene denominato in alto se il limite euguale a +∞ ed in basso se e uguale a −∞.
Evidentemente, i punti x0 ∈ R in cui vi possono essere asintoti verticaliper una funzione devono essere innanzitutto di accumulazione per il suoinsieme di definizione ed in essi o la funzione non deve essere definita oppurenon deve essere continua in quanto solo in tali casi infatti il limite dellafunzione potrebbe risultare infinito. La verifica poi del fatto che la rettax = x0 rappresenti o meno l’equazione di un asintoto verticale per f vieneeffettuata mediante il calcolo diretto del limite destro oppure sinistro dellafunzione.
Puo accadere che se il punto x0 e di accumulazione sia a destra che asinistra per X, la retta di equazione x = x0 rappresenti un asintoto verticaleper f solamente a sinistra oppure solamente a destra; ad esempio, per lafunzione f(x) := e1/x, x = 0, la retta di equazione x = 0 e un asintotoverticale in alto solamente a destra. Puo anche accadere che la retta diequazione x = x0 sia un asintoto da un lato in alto e dall’altro in basso,come ad esempio, per la funzione f(x) := 1/x, x ∈ R " 0, nel puntox0 = 0.
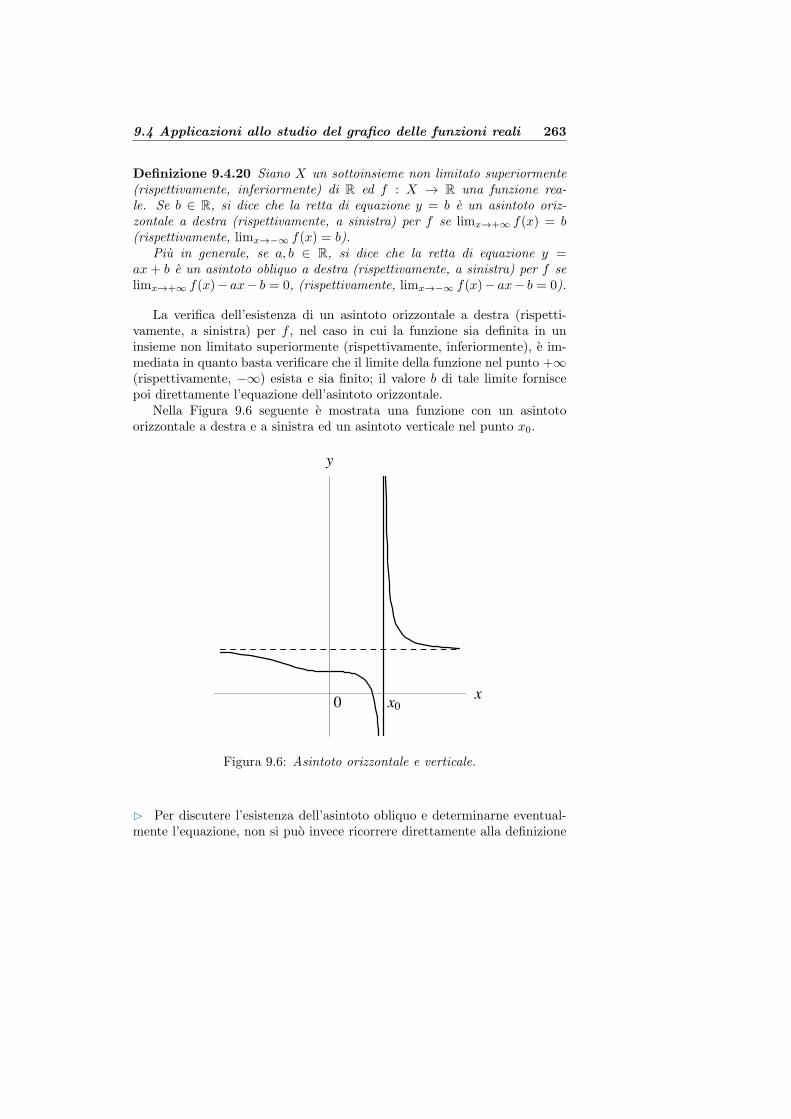
9.4 Applicazioni allo studio del grafico delle funzioni reali 263
Definizione 9.4.20 Siano X un sottoinsieme non limitato superiormente(rispettivamente, inferiormente) di R ed f : X → R una funzione rea-le. Se b ∈ R, si dice che la retta di equazione y = b e un asintoto oriz-zontale a destra (rispettivamente, a sinistra) per f se limx→+∞ f(x) = b(rispettivamente, limx→−∞ f(x) = b).
Piu in generale, se a, b ∈ R, si dice che la retta di equazione y =ax + b e un asintoto obliquo a destra (rispettivamente, a sinistra) per f selimx→+∞ f(x)− ax− b = 0, (rispettivamente, limx→−∞ f(x)− ax− b = 0).
La verifica dell’esistenza di un asintoto orizzontale a destra (rispetti-vamente, a sinistra) per f , nel caso in cui la funzione sia definita in uninsieme non limitato superiormente (rispettivamente, inferiormente), e im-mediata in quanto basta verificare che il limite della funzione nel punto +∞(rispettivamente, −∞) esista e sia finito; il valore b di tale limite forniscepoi direttamente l’equazione dell’asintoto orizzontale.
Nella Figura 9.6 seguente e mostrata una funzione con un asintotoorizzontale a destra e a sinistra ed un asintoto verticale nel punto x0.
x
y
0 x0
Figura 9.6: Asintoto orizzontale e verticale.
Per discutere l’esistenza dell’asintoto obliquo e determinarne eventual-mente l’equazione, non si puo invece ricorrere direttamente alla definizione

264 Capitolo 9: Calcolo differenziale
in quanto i numeri a, b ∈ R previsti nell’equazione dell’asintoto obliquo nonsono in generale assegnati.
Tuttavia si riconosce facilmente che f e dotata di asintoto obliquo adestra (rispettivamente, a sinistra) se e solo se esistono, e sono finiti, iseguenti limiti
limx→+∞
f(x)
x= a ∈ R , lim
x→+∞f(x)− ax = b ∈ R ,
(rispettivamente,
limx→−∞
f(x)
x= a ∈ R , lim
x→−∞f(x)− ax = b ∈ R ).
In tal caso, l’asintoto obliquo a destra (rispettivamente, a sinistra) per f haequazione y = ax+ b.
(Infatti se F e dotata di asintoto obliquo a destra di equazione y = ax+ b, con a, b ∈ R,allora
limx→+∞
f(x)
x= lim
x→+∞
f(x)− ax− b
x+ lim
x→+∞
ax+ b
x= a ,
ed inoltrelim
x→+∞f(x)− ax = lim
x→+∞(f(x)− ax− b) + b = b .
Viceversa si ottiene direttamente
limx→+∞
f(x)− ax− b = b− b = 0
e quindi la proprieta e completamente dimostrata insieme all’espressione dell’equazione
dell’asintoto obliquo. Nel caso degli asintoti obliqui a sinistra si procede in maniera del
tutto analoga. #)
L’importanza della proposizione precedente risiede nel fatto che essafornisce un metodo per individuare il possibile coefficiente angolare ed iltermine noto dell’equazione dell’asintoto obliquo. Bisogna tuttavia sempreverificare che entrambi i limiti previsti esistano e siano finiti; ad esempio,la funzione logaritmo non e dotata di asintoto obliquo a destra in quantolimx→+∞ log x/x = 0, ma limx→+∞(log x− 0 · x) = +∞.
Ad esempio, si determinano gli eventuali asintoti della funzione
f(x) := x+1
x− 1+ arctanx+ arctan
1
x, x ∈ R" 0, 1 .
La funzione e definita e continua in R " 0, 1 e quindi puo presentareun asintoto verticale solamente nei punti 0 e 1. Risulta limx→0− f(x) =−1 − π/2 e limx→0+ f(x) = −1 + π/2 e quindi la retta di equazione x = 0non e asintoto ne a sinistra ne a destra per f . Inoltre limx→1− f(x) = −∞

9.4 Applicazioni allo studio del grafico delle funzioni reali 265
e limx→1+ f(x) = +∞ e quindi la retta di equazione x = 1 e asintoto asinistra in basso e a destra in alto per f .
Infine, si ha limx→±∞ f(x) = ±∞ e quindi non esistono asintoti oriz-zontali, mentre
limx→±∞
f(x)
x= 1 , lim
x→±∞f(x)− x = ±π
2,
e quindi la retta di equazione y = x+π/2 e un asintoto obliquo a destra perf mentre la retta di equazione y = x− π/2 e un asintoto obliquo a sinistraper f .
9.4.4 Studio del grafico di una funzione reale
Una funzione reale viene spesso assegnata precisando il valore assunto inun generico elemento dell’insieme di definizione. Lo scopo della discus-sione seguente e quello di determinare le informazioni che possono esse-re utili ad una descrizione piu dettagliata della funzione ed a tracciarneapprossimativamente il grafico.
Il primo passo e sicuramente quello di determinare l’insieme X di defi-nizione della funzione ricordando che per convenzione esso e costituito datutti i numeri reali in cui ha senso l’espressione assegnata (in altre parole,si sceglie il sottoinsieme piu grande di R in cui la funzione puo essere defini-ta). Conviene poi subito vedere se l’insieme di definizione X e simmetricooppure periodico, e in caso affermativo verificare se la funzione e pari, di-spari oppure periodica; tali informazioni possono semplificare lo studio ditutti i punti successivi e per questo motivo e opportuno stabilire subito taliproprieta. Se una funzione e pari oppure dispari, essa puo essere studiatasolamente in X∩ [0,+∞[ (oppure in X∩]−∞, 0]) e se e periodica di periodoT > 0, puo essere studiata in X ∩ [a, a+T ], dove a e un numero reale sceltoarbitrariamente.
Si passa poi allo studio del segno della funzione risolvendo la disequa-zione f(x) ≥ 0 ed allo studio delle intersezioni con l’asse x, fornite dallesoluzioni dell’equazione f(x) = 0; l’eventuale intersezione con l’asse y esistese 0 ∈ X ed e in questo caso il punto di coordinate (0, f(0)).
Segue lo studio della continuita della funzione; i punti in cui la funzionenon e continua vengono utilizzati per verificare in essi l’eventuale esisten-za di asintoti verticali. Si considerano quindi anche gli eventuali asintotiorizzontali oppure obliqui se la funzione e definita in un insieme non limitato.
Infine, lo studio della derivabilita prima e seconda e del segno dellederivate prima e seconda consentono di determinare crescenza e decrescen-za della funzione e massimi e minimi relativi ed assoluti, e la convessita,concavita e punti di flesso.

266 Capitolo 9: Calcolo differenziale
Tutte le informazioni ottenute vengono poi riassunte con un graficoapprossimativo della funzione.
Pertanto, lo schema seguente e quello che viene solitamente seguito perlo studio di una funzione di cui e assegnato il generico valore y = f(x):
1) Determinazione dell’insieme di definizione.
2) Eventuale parita, disparita e periodicita.
3) Studio del segno della funzione ed eventuali intersezioni con gli assi.
4) Continuita.
5) Asintoti verticali, orizzontali ed obliqui.
6) Derivabilita della funzione e calcolo delle derivate prima e seconda.
7) Studio della crescenza e della decrescenza.
8) Punti di massimo e di minimo relativo ed eventualmente assoluti.
9) Studio della convessita, concavita e flessi (eventuali tangenti flessionali).
10) Grafico riassuntivo della funzione.
Ad esempio, si studia la seguente funzione tracciandone approssimati-vamente il grafico
f(x) :=
√x2 − 5x+ 6
x2 − 1.
Per determinare l’insieme di definizione, bisogna imporre le condizioni
x2 − 5x+ 6 ≥ 0 ,x2 − 1 = 0 ;
si deduce che f e definita nell’insieme
Xf :=]−∞,−1[∪]− 1, 1[∪]1, 2] ∪ [3,+∞[ ;
poiche Xf non e simmetrico ne periodico, la funzione non puo verificarecondizioni di simmetria o di periodicita.
Inoltre, il segno della funzione dipende solamente dal denominatore x2−1e quindi la funzione e positiva negli intervalli ] −∞,−1[, ]1, 2] e [3,+∞[ e

9.4 Applicazioni allo studio del grafico delle funzioni reali 267
negativa nell’intervallo ] − 1, 1[; vi sono due intersezioni con l’asse delleascisse nei punti A(2, 0), B(3, 0) mentre l’unica intersezione con l’asse delleordinate e data dal punto C(0,−
√6).
La funzione e continua in tutto Xf ; pertanto si possono presentare even-tuali asintoti verticali solamente nei punti −1 e 1 (che sono di accumulazionema in cui f non e definita), nei quali si ha
limx→−1−
f(x) = +∞ , limx→−1+
f(x) = −∞ ,
limx→1−
f(x) = −∞ , limx→1+
f(x) = +∞ ;
quindi la retta di equazione x = −1 e un asintoto verticale in alto a sinistrae in basso a destra per f , mentre la retta di equazione x = 1 e un asintotoverticale in basso a sinistra e in alto a destra.
Si ha inoltre limx→±∞ f(x) = 0 e quindi la retta di equazione y = 0 eun asintoto orizzontale sia a sinistra che a destra per f .
L’argomento della radice nella definizione di f si annulla solamente neipunti 2 e 3 e quindi la funzione e infinite volte derivabile in Xf " 2, 3 e siha, per ogni x ∈ Xf " 2, 3,
f ′(x) = − 2x3 − 15x2 + 26x− 5
2(x2 − 1)2√x2 − 5x+ 6
,
f ′′(x) =8x6 − 120x5 + 615x4 − 1400x3 + 1458x2 − 720x+ 287
4(x2 − 1)3√x2 − 5x+ 6(x2 − 5x+ 6)
.
Nei punti 2 e 3 la derivata prima tende a−∞ e rispettivamente a +∞; quindif e dotata di derivata nei punti 2 e 3 e si ha f ′(2) = −∞ e f ′(3) = +∞.
Utilizzando la regola di Ruffini si riconosce subito che il punto x0 := 5 euna radice del polinomio 2x3−15x2+26x−5; a questo punto possono esseredeterminate facilmente anche le altre radici, che sono x1 := (5−
√17)/4 (ap-
prossimativamente, x1 ∼ 0, 22) e x2 := (5 +√17)/4 (approssimativamente,
x2 ∼ 2, 28; dunque, x2 /∈ Xf ); si puo allora dedurre che la derivata prima estrettamente positiva in ]−∞,−1[∪]− 1, x1[∪]3, 5[ e strettamente negativain ]x1, 1[∪]1, 2[∪]5,+∞[. La funzione e pertanto strettamente crescente inognuno degli intervalli ]−∞,−1[, ]−1, x1] e [3, 5] e strettamente decrescentein [x1, 1[, ]1, 2] e [5,+∞[; i punti x0 e x1 di massimo relativo proprio per fed i punti corrispondenti del grafico hanno coordinate
D
(5−√17
4,−√2√25√17 + 103
(√17 + 5
)
10√17 + 38
), E
(5,
√6
24
)
(approssimativamente, f(x1) ∼ −2, 33, f(x0) ∼ 0, 1). I punti 2 e 3 sonoinoltre di minimo relativo proprio per f , mentre non esistono punti di mas-

268 Capitolo 9: Calcolo differenziale
simo o di minimo assoluto in quanto f non e limitata ne superiormente neinferiormente (infatti, e dotata di asintoti verticali sia in alto che in basso).
Lo studio del segno della derivata seconda si presenta abbastanza com-plicato e quindi si passa direttamente a tracciare il grafico della funzionedelineato approssimativamente nella Figura 9.7 successiva.
x
y
0-1 1 A B
CE
D
Figura 9.7: Grafico della funzione.
Come ulteriore esempio, si studia la seguente funzione e se ne tracciaapprossimativamente il grafico
f(x) :=
∣∣∣∣logx− 2
x+ 3− 1
∣∣∣∣ .
La funzione e definita per (x− 2)/(x+ 3) > 0 e quindi nell’insieme
Xf :=]−∞,−3[∪]2,+∞[ .
Inoltre essa non e ne pari, ne dispari, ne periodica; e sempre positiva esi annulla per log(x − 2)/(x + 3) = 1, cioe per (x − 2)/(x + 3) = e; taleequazione ammette un’unica soluzione x0 = −(3e + 2)/(e − 1). Quindivi e un’unica intersezione con l’asse delle ascisse nel punto di coordinate

9.4 Applicazioni allo studio del grafico delle funzioni reali 269
A(−(3e+ 2)(e− 1), 0). Non vi sono intersezioni con l’asse delle ordinate inquanto 0 /∈ Xf .
Inoltre f e continua in tutto Xf e, per quanto riguarda gli estremi, si ha
limx→−3
f(x) = +∞ , limx→2
f(x) = +∞ ,
limx→−∞
f(x) = 1 , limx→+∞
f(x) = 1 ;
quindi le rette di equazione x = −3 e x = 2 sono asintoti verticali in altoper f , mentre la retta di equazione y = 1 e un asintoto orizzontale sia asinistra che a destra per f .
La funzione e infinite volte derivabile in Xf " x0 e, per ogni x ∈Xf " x0, si ha
f ′(x) =log x−2
x+3 − 1∣∣∣log x−2
x+3 − 1∣∣∣D
(log
x− 2
x+ 3− 1
)=
log x−2x+3 − 1
∣∣∣log x−2x+3 − 1
∣∣∣
5
(x− 2)(x+ 3);
il prodotto (x− 2)(x+ 3) e sempre positivo in Xf " x0 e quindi il segnodella derivata prima di f dipende solamente dal fattore log(x−2)/(x+3)−1,che e positivo per (x − 2)/(x + 3) > e; si conclude che f ′ e strettamentepositiva in ]x0,−3[ e strettamente negativa in ] − ∞, x0[∪]2,+∞[; quindif e strettamente crescente in [x0,−3[ e strettamente decrescente in ognunodegli intervalli ] −∞, x0] e ]2,+∞[; il punto x0 e di minimo relativo (anziassoluto) per il primo criterio sui massimi e minimi relativi (Proposizione9.4.4) e si ha f(x0) = 0. Nel punto x0 la funzione non e derivabile in quanto
f ′−(x0) = lim
x→x−0
f ′(x) = limx→x−
0
− 5
(x− 2)(x+ 3)= − (e− 1)2
5e,
f ′+(x0) = lim
x→x+0
f ′(x) = limx→x+
0
5
(x− 2)(x+ 3)=
(e− 1)2
5e.
Infine, per ogni x ∈ Xf " x0, si ha
f ′′(x) = − 5(2x+ 1)
(x− 2)2(x+ 3)2log x−2
x+3 − 1∣∣∣log x−2
x+3 − 1∣∣∣.
Dallo studio del segno della derivata seconda, si deduce che f e strettamenteconvessa in ognuno degli intervalli ]2,+∞[ e [x0,−3[ mentre e strettamenteconcava nell’intervallo ] − ∞, x0]. Il grafico della funzione viene tracciatoapprossimativamente nella Figura 9.8 seguente.
x
y
0A
Figura 9.8: Grafico della funzione.
Capitolo 10
Calcolo integrale
Nel presente capitolo viene introdotta la teoria generale dell’integrazionesu intervalli limitati e successivamente viene anche considerato l’integraleimproprio di funzioni non limitate oppure su intervalli non limitati.
10.1 L’integrale secondo Riemann
La teoria dell’integrazione secondo Riemann risponde in maniera soddisfa-cente a criteri di semplicita e naturalezza.
Tale integrale sara sufficiente nelle applicazioni che si ci propone diconsiderare anche a riguardo delle connessioni con la teoria della misura,concernenti prevalentemente misure di aree, volumi e lunghezza di curve.
10.1.1 Suddivisioni di un intervallo
Sono necessarie alcune considerazioni introduttive riguardanti gli intervallichiusi e limitati. Nel seguito del paragrafo si intendera fissato un intervallochiuso e limitato [a, b] con a, b ∈ R, a < b.
Se n ≥ 1, si dice che una famiglia finita P = (xi)i=0,...,n di numeri realie una suddivisione di [a, b] se
x0 = a , xn = b , ∀ i = 0, . . . , n− 1 : xi < xi+1 . (10.1.1)
L’insieme di tutte le suddivisioni dell’intervallo [a, b] viene denotato percomodita con il simbolo Σ([a, b]).
Se P = (xi)i=0,...,n e una suddivisione di [a, b], si denomina ampiezza diP , e la si denota con |P |, il seguente numero reale
|P | := maxi=1,...,n−1
(xi+1 − xi) .
272 Capitolo 10: Calcolo integrale
Una prima proprieta utile per il seguito riguarda la possibilita di otteneresuddivisioni di ampiezza arbitrariamente piccola. Infatti, per ogni ε > 0,esiste una suddivisione P di [a, b] tale che |P | ≤ ε.(Infatti, considerato un numero naturale n ≥ 1 tale che n ≥ (b − a)/ε e posto, per ognii = 0, . . . , n,
xi := a+i
n(b− a) ;
allora la famiglia finita P = (xi)i=0,...,n e una suddivisione di [a, b] e si ha, per ogni
i = 0, . . . , n− 1, xi+1 − xi = (b− a)/n ≤ ε, da cui anche |P | ≤ ε. #)
Le suddivisioni considerate nella dimostrazione precedente hanno la par-ticolare proprieta che la distanza tra due elementi successivi xi e xi+1,i = 0, . . . , n − 1, e costante e coincide con l’ampiezza della suddivisione;tali suddivisioni vengono denominate equispaziate.
La possibilita di confrontare due suddivisioni e basata sulla seguentedefinizione. Se P1 = (xi)i=0,...,n e P2 = (xi)i=0,...,n sono due suddivisioni di[a, b], si dice che P1 e meno fine di P2 (oppure, equivalentemente, che P2
e piu fine di P1) se l’insieme degli elementi di P1 e contenuto nell’insiemedegli elementi di P2, cioe se
∀ i = 0, . . . , n : ∃ j = 0, . . . ,m t.c. xi = yj .
Si verifica facilmente che se P1 e meno fine di P2, allora |P2| ≤ |P1|.
Una proprieta importante riguardante la relazione introdotta riguardail fato che, se P1 = (xi)i=0,...,n e P2 = (xi)i=0,...,n sono due arbitrariesuddivisioni di [a, b], allora esiste sempre un’ulteriore suddivisione P di [a, b]piu fine sia di P1 che di P2.
(Infatti, basta riordinare tutti gli elementi delle due suddivisioni per ottenere quelli della
suddivisione P . Precisamente, siano X1 l’insieme degli elementi della suddivisione P1,
X2 l’insieme degli elementi della suddivisione P2 e si ponga X := X1 ∪X2. L’insieme X
e finito; posto p = card(X), si puo definire la famiglia finita P = (zi)i=0,...,p ponendo
z0 := minX e per ogni i = 1, . . . , p, zi = min(X " z0, . . . , zi−1); e facile verificare a
questo punto che P e una suddivisione di [a, b] e che verifica le condizioni richieste. #)
10.1.2 Integrabilita delle funzioni limitate
Si fissa ora una funzione limitata f : [a, b] → R su un intervallo chiuso elimitato [a, b] (a, b ∈ R, a < b).
Se P = (xi)i=0,...,n e una suddivisione dell’intervallo [a, b], per ogni i =0, . . . , n, si possono considerare
Mi := supx∈[xi,xi+1]
f(x) , mi := infx∈[xi,xi+1]
f(x) .
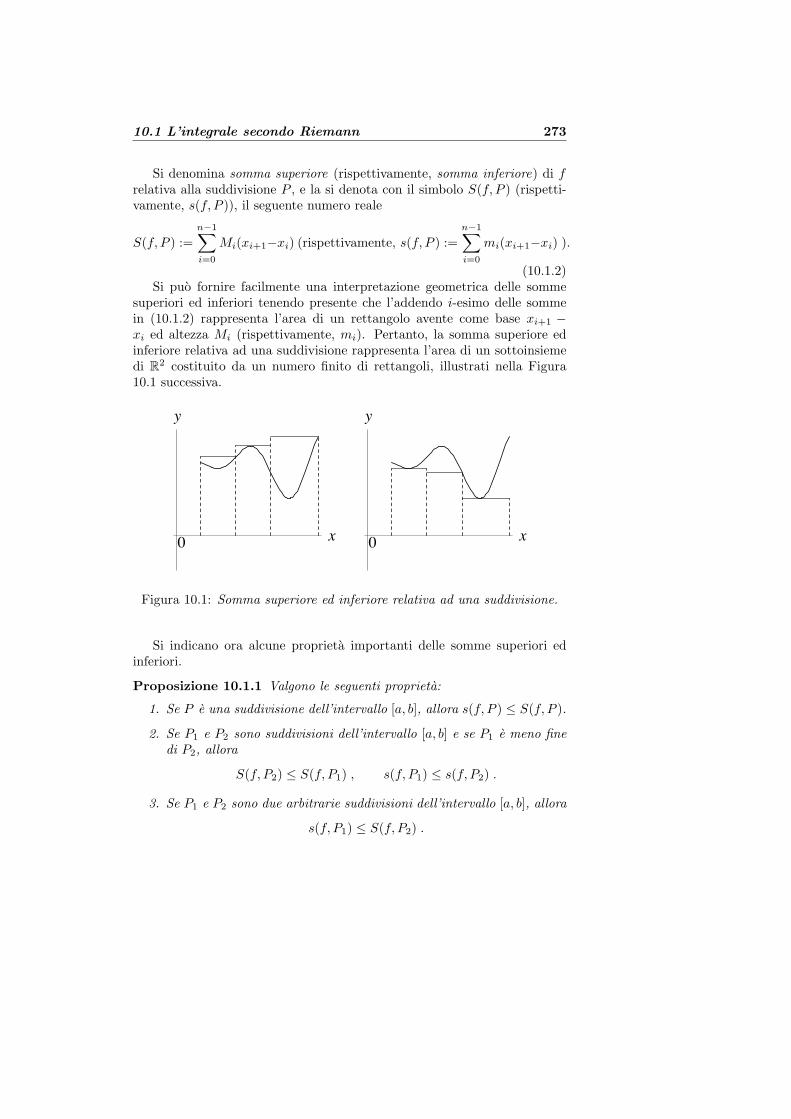
10.1 L’integrale secondo Riemann 273
Si denomina somma superiore (rispettivamente, somma inferiore) di frelativa alla suddivisione P , e la si denota con il simbolo S(f, P ) (rispetti-vamente, s(f, P )), il seguente numero reale
S(f, P ) :=n−1∑
i=0
Mi(xi+1−xi) (rispettivamente, s(f, P ) :=n−1∑
i=0
mi(xi+1−xi) ).
(10.1.2)Si puo fornire facilmente una interpretazione geometrica delle somme
superiori ed inferiori tenendo presente che l’addendo i-esimo delle sommein (10.1.2) rappresenta l’area di un rettangolo avente come base xi+1 −xi ed altezza Mi (rispettivamente, mi). Pertanto, la somma superiore edinferiore relativa ad una suddivisione rappresenta l’area di un sottoinsiemedi R2 costituito da un numero finito di rettangoli, illustrati nella Figura10.1 successiva.
x
y
0 x
y
0
Figura 10.1: Somma superiore ed inferiore relativa ad una suddivisione.
Si indicano ora alcune proprieta importanti delle somme superiori edinferiori.
Proposizione 10.1.1 Valgono le seguenti proprieta:
1. Se P e una suddivisione dell’intervallo [a, b], allora s(f, P ) ≤ S(f, P ).
2. Se P1 e P2 sono suddivisioni dell’intervallo [a, b] e se P1 e meno finedi P2, allora
S(f, P2) ≤ S(f, P1) , s(f, P1) ≤ s(f, P2) .
3. Se P1 e P2 sono due arbitrarie suddivisioni dell’intervallo [a, b], allora
s(f, P1) ≤ S(f, P2) .
274 Capitolo 10: Calcolo integrale
Dimostrazione. 1) Segue direttamente dalle definizioni adottate.2) Sia P1 = (xi)i=0,...,n una suddivisione meno fine di un’ulteriore suddivisione P2 =(yi)i=0,...,m. Per ogni i = 0, . . . , n si denoti con j(i) il numero naturale tale che yj(i) = xi.Allora
Mi(xi+1 − xi) = Mi(yj(i+1) − yj(i)) ≥j(i+1)−1∑
j=j(i)
Mj(yj+1 − yj) ,
e analogamente
mi(xi+1 − xi) = mi(yj(i+1) − yj(i)) ≤j(i+1)−1∑
j=j(i)
mj(yj+1 − yj) .
Sommando i termini precedenti per i = 0, . . . , n− 1 si ottiene la tesi.
3) Si consideri una suddivisione P di [a, b] piu fine sia di P1 che di P2. Dalla 2) e dalla
1) gia dimostrate segue allora s(f, P1) ≤ s(f, P ) ≤ S(f, P ) ≤ S(f, P2). #
Dalla Proposizione 10.1.1, 3) precedente segue, per ogni P ∈ Σ([a, b]),s(f, P1) ≤ S(f, P ) e quindi il sottoinsieme
S(f) := S(f, P ) | P ∈ Σ([a, b])
di R costituito da tutte le somme superiori di f e limitato inferiormente;l’estremo inferiore di tale sottoinsieme viene denominato integrale superioredi f in [a, b] e denotato con uno dei simboli
∫ b
af ,
∫ b
af(x) dx .
Pertanto, l’integrale superiore di f e l’estremo inferiore delle somme supe-riori di f e soddisfa la seguente condizione, per ogni P1 ∈ Σ([a, b])
s(f, P1) ≤∫ b
af ,
cioe l’integrale superiore e un maggiorante di tutte le somme inferiori di f .Pertanto, anche il sottoinsieme
s(f) := s(f, P ) | P ∈ Σ([a, b])
di R costituito da tutte le somme inferiori di f e limitato superiormente edil suo estremo superiore viene denominato integrale inferiore di f in [a, b] edenotato con uno dei simboli
∫ b
af ,
∫ b
af(x) dx .

10.1 L’integrale secondo Riemann 275
Pertanto, l’integrale inferiore di f e l’estremo superiore delle somme inferioridi f e ricordando che l’integrale superiore e un maggiorante delle sommeinferiori, si ottiene la relazione
∫ b
af ≤
∫ b
af .
L’integrale superiore ed inferiore puo essere definito per una qualsiasifunzione limitata in [a, b]. In generale, non ci si puo aspettare che nellaformula precedente valga un’uguaglianza.
Ad esempio, si consideri la funzione di Dirichlet d : [0, 1] → R definitaponendo, per ogni x ∈ [0, 1],
d(x) :=
1 , x ∈ [0, 1] ∩Q ,0 , x ∈ [0, 1] ∩ (R"Q) .
Tale funzione e stata gia considerata nella (8.1.1) e si e osservato che essanon e continua in alcun punto dell’intervallo [0, 1]. Se P = (xi)i=0,...,n e unasuddivisione di [a, b], in ogni intervallo [xi, xi+1], i = 0, . . . , n − 1, vi sonosia punti razionali che irrazionali e quindi risulta Mi = 1 e mi = 0; pertanto
S(d, P ) =n−1∑
i=0
(xi+1 − xi) = 1 , s(d, P ) = 0 ;
dall’arbitrarieta della suddivisione segue S(d) = 1, s(d) = 0 e quindianche ∫ b
ad = 0 ,
∫ b
ad = 1 .
Le considerazioni precedenti giustificano la seguente definizione di fun-zione integrabile.
Definizione 10.1.2 Se f : [a, b]→ R e una funzione limitata, si dice che fe integrabile secondo Riemann in [a, b] se l’integrale superiore di f coincidecon l’integrale inferiore di f
∫ b
af =
∫ b
af .
In tal caso il valore comune dell’integrale superiore ed inferiore di f vienedenominato integrale di f esteso all’intervallo [a, b] e si denota con uno deiseguenti simboli
∫
[a,b]f ,
∫
[a,b]f(x) dx (=
∫ b
af =
∫ b
af ).

276 Capitolo 10: Calcolo integrale
(Talvolta viene anche utilizzata la notazione∫ ba f .)
L’insieme delle funzioni f : [a, b] → R integrabili secondo Riemann in[a, b] viene denotato con il simbolo R([a, b]).
Dalla definizione adottata segue subito che se f : [a, b] → R e una fun-zione costante di costante valore c ∈ R, essa e integrabile secondo Riemannin [a, b] e si ha ∫
[a,b]c dx = c(b− a) .
Infatti in questo caso si ha s(f, P ) = S(f, P ) = c(b − a) per ogni P ∈Σ([a, b]).
Tuttavia, in generale la definizione precedente non risulta sufficiente-mente maneggevole nelle applicazioni al fine di stabilire se una funzionee o meno integrabile secondo Riemann. Per questo motivo, e particolar-mente utile avere a disposizione dei criteri di integrabilita di piu sempliceapplicazione.
Proposizione 10.1.3 (Primo criterio di integrabilita mediante sud-divisioni)Sia f : [a, b] → R una funzione limitata. Allora, le seguenti proposizionisono equivalenti:
a) f e integrabile secondo Riemann in [a, b].
b) ∀ ε > 0 ∃ P1, P2 ∈ Σ([a, b]) t.c. S(f, P2)− s(f, P1) < ε.
c) ∀ ε > 0 ∃ P ∈ Σ([a, b]) t.c. S(f, P )− s(f, P ) < ε.
Dimostrazione. a)⇒ b) Si supponga che f sia integrabile secondo Riemann in [a, b] esia ε > 0; dalla definizione di integrale inferiore e dalla seconda proprieta dell’estremosuperiore, si puo trovare una suddivisione P1di[a, b] tale che
∫
[a,b]f −
ε
2< s(f, P1) ;
analogamente, dalla definizione di integrale superiore e dalla seconda proprieta dell’estre-mo inferiore, si puo trovare una suddivisione P2 di [a, b] tale che
S(f, P2) <
∫
[a,b]f −
ε
2.
Allora, S(f, P2)− s(f, P1) < ε/2 + ε/2 = ε e cio dimostra la b).b)⇒ c) Si fissi ε > 0; dalla b), si possono trovare P1, P2 ∈ Σ([a, b]) tali che S(f, P2) −s(f, P1) < ε. Allora, considerata una suddivisione P di [a, b] piu fine sia di P1 che di P2,si ha S(f, P )− s(f, P ) ≤ S(f, P2)− s(f, P1) < ε.
c)⇒ a) Bisogna dimostrare che∫ ba f =
∫ ba f o equivalentemente che, fissato ε > 0, risulta
∫ ba f∫ ba < ε; infatti dalla c), si puo considerare una suddivisione P di [a, b] tale che

10.1 L’integrale secondo Riemann 277
S(f, P ) − s(f, P ) < ε; allora, dalla prima proprieta dell’estremo inferiore e superiore,
risulta∫ ba f ≤ S(f, P ) e analogamente, dalla prima proprieta dell’estremo superiore, segue
s(f, P ) ≤∫ ba f . Pertanto
∫ b
af −
∫ b
af ≤ S(f, P )− s(f, P ) < ε . #
Il primo criterio di integrabilita stabilito nella proposizione precedentee sufficiente per stabilire l’integrabilita di diverse classi di funzioni. Si ri-conosce subito, ad esempio, l’integrabilita delle funzioni monotone e dellefunzioni continue.
Teorema 10.1.4 (Integrabilita delle funzioni monotone)Se f : [a, b] → R e una funzione monotona, allora f e integrabile secondoRiemann in [a, b].
Dimostrazione. Si osserva innanzitutto che f e limitata; infatti, se f e crescente risulta,per ogni x ∈ [a, b], f(a) ≤ f(x) ≤ f(b) mentre, se f e decrescente si ha, per ogni x ∈ [a, b],f(b) ≤ f(x) ≤ f(a).
Si supponga che f sia crescente e si fissi ε > 0. Posto δ = ε/(f(b) − f(a) + 1),si puo considerare una suddivisione P = (xi)i=0,...,n di [a, b] tale che |P | ≤ δ. Perogni i = 0, . . . , n − 1, dalla crescenza di f segue Mi := supx∈[xi,xi+1]
f(x) = f(xi+1) e
mi := infx∈[xi,xi+1] f(x) = f(xi) da cui
S(f, P )− s(f, P ) =n−1∑
i=0
(f(xi+1)− f(xi))(xi+1 − xi)
≤ δn−1∑
i=0
(f(xi+1)− f(xi))
= δ(−f(x0) + f(xn)) =ε
f(b)− f(a) + 1(f(b)− f(a)) < ε .
Dalla Proposizione 10.1.3, segue che f e integrabile. #
Teorema 10.1.5 (Integrabilita delle funzioni continue)Se f : [a, b] → R e una funzione continua, allora f e integrabile secondoRiemann in [a, b].
Dimostrazione. Anche ora conviene osservare subito che f e sicuramente limitata comeconseguenza del teorema di Weierstrass (Teorema 8.2.1.
Dal teorema sull’uniforme continuita di Cantor (Teorema 8.4.2), f e uniformementecontinua e quindi, fissato ε > 0, si puo trovare δ > 0 tale che, per ogni x, y ∈ [a, b]verificanti la condizione |x − y| ≤ δ, si abbia |f(x) − f(y)| ≤ ε/(b − a). Si fissi orauna suddivisione P = (xi)i=0,...,n di [a, b] tale che |P | ≤ δ. Per ogni i = 0, . . . , n −1, dal teorema di Weierstrass applicato alla restrizione di f all’intervallo [xi, xi+1], sipossono trovare ci, di ∈ [xi, xi+1] tali che f(ci) = maxx∈[xi,xi+1] f(x) =: Mi e f(di) =

278 Capitolo 10: Calcolo integrale
minx∈[xi,xi+1] f(x) =: mi. Poiche |ci − di| ≤ xi+1 − xi ≤ |P | ≤ δ, deve essere anche
f(di)− f(ci) ≤ ε/(b− a); pertanto,
S(f, P )− s(f, P ) =n−1∑
i=0
(f(di)− f(ci))(xi+1 − xi) ≤ε
b− a
n−1∑
i=0
(xi+1 − xi)
=ε
b− a(−x0 + xn) =
ε
b− a(b− a) < ε .
Dunque e verificata la condizione c) della Proposizione 10.1.3 e pertanto f e integrabile
secondo Riemann in [a, b]. #
10.1.3 Interpretazione geometrica e proprieta dell’in-tegrale esteso
La definizione fornita di integrale definito di una funzione limitata si prestain modo naturale ad essere interpretata come area di una opportuna figurapiana.
Se X ⊂ R ed f : X → R e una funzione positiva, si denomina trapezoiderelativo ad f di base X e lo si denota con T (f) il seguente sottoinsieme diR2
T (f) := (x, y) ∈ R2 | x ∈ X , 0 ≤ y ≤ f(x) .
Sia ora f : [a, b]→ R una funzione integrabile secondo Riemann in [a, b].Si supponga dapprima che f sia positiva. Fissata una suddivisione P
di [a,b], si e visto che la somma superiore di f relativa a P rappresental’area di un sottoinsieme di R2, piu precisamente di un plurintervallo chiuso1
contenente T (f), mentre la somma inferiore di f relativa a P rappresental’area di un plurintervallo chiuso contenuto in T (f).
Poiche f e integrabile, l’estremo inferiore dei plurintervalli contenentiT (f) e uguale all’estremo superiore dei plurintervalli contenuti in T (f) equindi il valore comune di tali estremi, cioe l’integrale esteso di f , devenecessariamente coincidere con l’area del trapezoide T (f) relativo ad f .
Se f : [a, b] → R e invece negativa, si puo applicare quanto sopra allafunzione −f e riconoscere che l’integrale esteso di f ad [a, b] coincide conl’opposto dell’area dell’insieme T (f) := (x, y) ∈ R2 | x ∈ [a, b] , f(x) ≤y ≤ 0.
Infine, se f : [a, b] → R non e ne positiva ne negativa, si puo comunquefornire un’interpretazione geometrica dell’integrale definito di f consideran-do separatamente gli intervalli in cui la funzione e positiva e quelli in cui enegativa; si stabilisce in questo modo che l’integrale esteso di f ad [a, b] coin-cide con l’area dell’insieme T+(f) := (x, y) ∈ R2 | x ∈ [a, b] , 0 ≤ y ≤ f(x)
1Si denomina intervallo chiuso in Rn ogni insieme del tipo I := [a1, b1]× · · ·× [an, bn],cioe prodotto cartesiano di n intervalli chiusi reali. Un plurintervallo chiuso e l’unionedi un numero finito di intervalli chiusi.
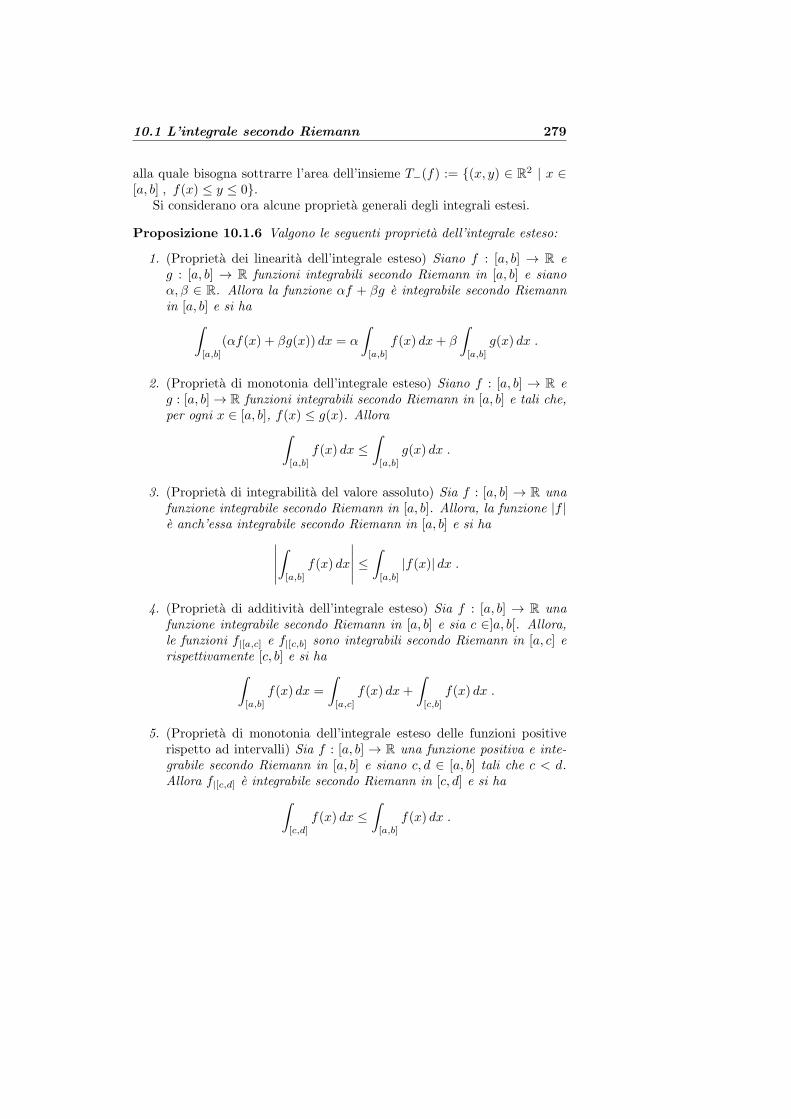
10.1 L’integrale secondo Riemann 279
alla quale bisogna sottrarre l’area dell’insieme T−(f) := (x, y) ∈ R2 | x ∈[a, b] , f(x) ≤ y ≤ 0.
Si considerano ora alcune proprieta generali degli integrali estesi.
Proposizione 10.1.6 Valgono le seguenti proprieta dell’integrale esteso:
1. (Proprieta dei linearita dell’integrale esteso) Siano f : [a, b] → R eg : [a, b] → R funzioni integrabili secondo Riemann in [a, b] e sianoα,β ∈ R. Allora la funzione αf + βg e integrabile secondo Riemannin [a, b] e si ha
∫
[a,b](αf(x) + βg(x)) dx = α
∫
[a,b]f(x) dx+ β
∫
[a,b]g(x) dx .
2. (Proprieta di monotonia dell’integrale esteso) Siano f : [a, b] → R eg : [a, b]→ R funzioni integrabili secondo Riemann in [a, b] e tali che,per ogni x ∈ [a, b], f(x) ≤ g(x). Allora
∫
[a,b]f(x) dx ≤
∫
[a,b]g(x) dx .
3. (Proprieta di integrabilita del valore assoluto) Sia f : [a, b] → R unafunzione integrabile secondo Riemann in [a, b]. Allora, la funzione |f |e anch’essa integrabile secondo Riemann in [a, b] e si ha
∣∣∣∣∣
∫
[a,b]f(x) dx
∣∣∣∣∣ ≤∫
[a,b]|f(x)| dx .
4. (Proprieta di additivita dell’integrale esteso) Sia f : [a, b] → R unafunzione integrabile secondo Riemann in [a, b] e sia c ∈]a, b[. Allora,le funzioni f|[a,c] e f|[c,b] sono integrabili secondo Riemann in [a, c] erispettivamente [c, b] e si ha
∫
[a,b]f(x) dx =
∫
[a,c]f(x) dx+
∫
[c,b]f(x) dx .
5. (Proprieta di monotonia dell’integrale esteso delle funzioni positiverispetto ad intervalli) Sia f : [a, b] → R una funzione positiva e inte-grabile secondo Riemann in [a, b] e siano c, d ∈ [a, b] tali che c < d.Allora f|[c,d] e integrabile secondo Riemann in [c, d] e si ha
∫
[c,d]f(x) dx ≤
∫
[a,b]f(x) dx .
280 Capitolo 10: Calcolo integrale
6. (Proprieta di invarianza dell’integrale esteso rispetto ad insiemi finiti)Sia f : [a, b]→ R una funzione integrabile secondo Riemann in [a, b] esia g : [a, b]→ R una funzione limitata. Se esiste un sottoinsieme fini-to H di [a, b] tale che f|[a,b]!H = g|[a,b]!H , allora anche g e integrabilesecondo Riemann in [a, b] e si ha
∫
[a,b]f(x) dx =
∫
[a,b]g(x) dx .
Dimostrazione. Le proprieta enunciate sono tutte basate sulle definizioni e sul cri-
terio di integrabilita mediante suddivisioni. Per brevita, si omettono i dettagli della
dimostrazione. #
Si considerano a questo punto alcune proprieta valide per le funzionicontinue.
Un criterio di integrabilita (Teorema di Vitali) puo essere enunciatoconsiderando il sottoinsieme H di [a, b] costituito dagli elementi di [a, b] incui una funzione f : [a, b]→ R non e continua. Tale risultato stabilisce chef e integrabile secondo Riemann in [a, b] se e solo se l’insieme H verifica laseguente condizione:
Per ogni ε > 0 esiste una successione ([an, bn])n∈N di intervalli conte-nuti in [a, b] tali che
H ⊂⋃
n∈N[an, bn] ,
+∞∑
n=0
(bn − an) < ε . .
Tale condizione esprime il fatto che l’insieme H ha misura nulla secondouna teoria della misura denominata di Lebesgue. Per brevita, si rinunciaalla dimostrazione di tale risultato.
Si riconosce facilmente, invece, che l’unica funzione continua e positivaavente integrale uguale a 0 e la funzione nulla. Precisamente, se f : [a, b]→R e una funzione continua e positiva e se esiste x0 ∈ [a, b] tale che f(x0) > 0,allora
∫[a,b] f > 0.
(Infatti f e continua in x0 e quindi, dalla proprieta di permanenza del segno, esistonor > 0 e δ > 0 tali che, per ogni x ∈ [a, b] ∩ [x0 − δ, x0 + δ], f(x) ≥ r. Allora, postoc := maxx0 − δ, a e d := minx0 + δ, b, si ha
∫
[a,b]f(x) dx ≥
∫
[c,d]f(x) dx ≥
∫
[a,b]r dx ≥ r(d− c) > 0 . #)
Si enuncia infine un ulteriore risultato importante per le funzioni conti-nue.
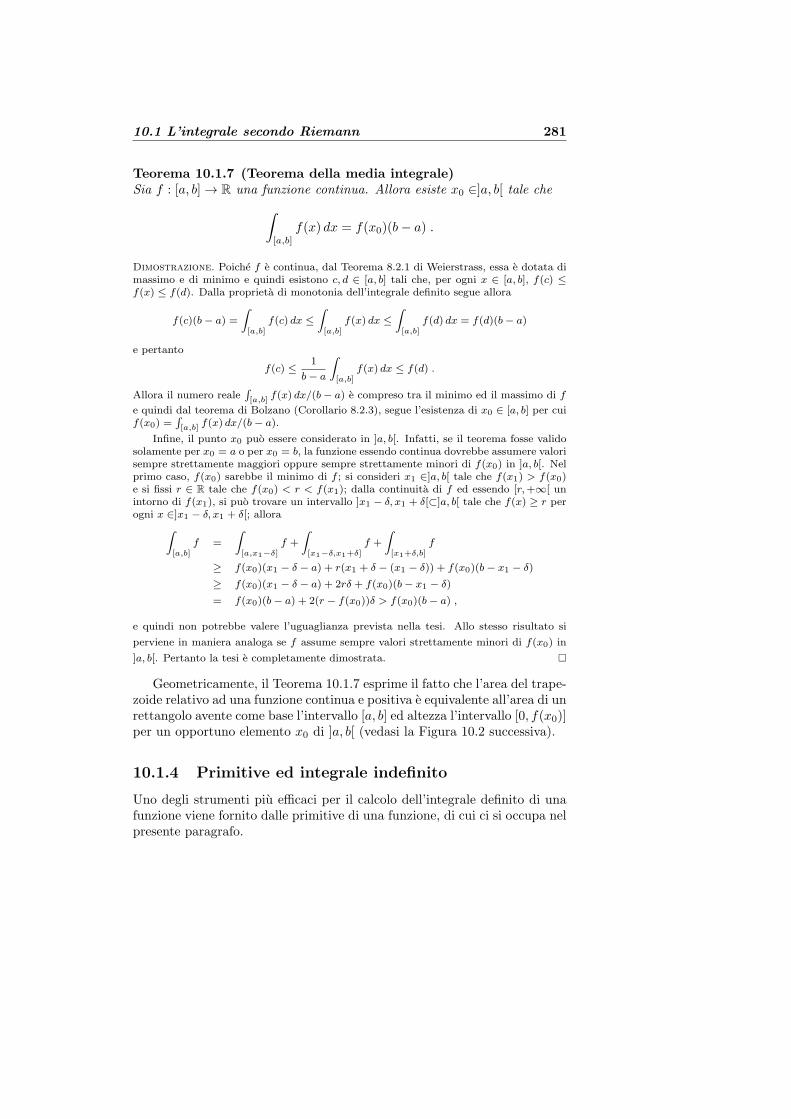
10.1 L’integrale secondo Riemann 281
Teorema 10.1.7 (Teorema della media integrale)Sia f : [a, b]→ R una funzione continua. Allora esiste x0 ∈]a, b[ tale che
∫
[a,b]f(x) dx = f(x0)(b− a) .
Dimostrazione. Poiche f e continua, dal Teorema 8.2.1 di Weierstrass, essa e dotata dimassimo e di minimo e quindi esistono c, d ∈ [a, b] tali che, per ogni x ∈ [a, b], f(c) ≤f(x) ≤ f(d). Dalla proprieta di monotonia dell’integrale definito segue allora
f(c)(b− a) =
∫
[a,b]f(c) dx ≤
∫
[a,b]f(x) dx ≤
∫
[a,b]f(d) dx = f(d)(b− a)
e pertanto
f(c) ≤1
b− a
∫
[a,b]f(x) dx ≤ f(d) .
Allora il numero reale∫[a,b] f(x) dx/(b− a) e compreso tra il minimo ed il massimo di f
e quindi dal teorema di Bolzano (Corollario 8.2.3), segue l’esistenza di x0 ∈ [a, b] per cuif(x0) =
∫[a,b] f(x) dx/(b− a).
Infine, il punto x0 puo essere considerato in ]a, b[. Infatti, se il teorema fosse validosolamente per x0 = a o per x0 = b, la funzione essendo continua dovrebbe assumere valorisempre strettamente maggiori oppure sempre strettamente minori di f(x0) in ]a, b[. Nelprimo caso, f(x0) sarebbe il minimo di f ; si consideri x1 ∈]a, b[ tale che f(x1) > f(x0)e si fissi r ∈ R tale che f(x0) < r < f(x1); dalla continuita di f ed essendo [r,+∞[ unintorno di f(x1), si puo trovare un intervallo ]x1 − δ, x1 + δ[⊂]a, b[ tale che f(x) ≥ r perogni x ∈]x1 − δ, x1 + δ[; allora
∫
[a,b]f =
∫
[a,x1−δ]f +
∫
[x1−δ,x1+δ]f +
∫
[x1+δ,b]f
≥ f(x0)(x1 − δ − a) + r(x1 + δ − (x1 − δ)) + f(x0)(b− x1 − δ)
≥ f(x0)(x1 − δ − a) + 2rδ + f(x0)(b− x1 − δ)
= f(x0)(b− a) + 2(r − f(x0))δ > f(x0)(b− a) ,
e quindi non potrebbe valere l’uguaglianza prevista nella tesi. Allo stesso risultato si
perviene in maniera analoga se f assume sempre valori strettamente minori di f(x0) in
]a, b[. Pertanto la tesi e completamente dimostrata. #
Geometricamente, il Teorema 10.1.7 esprime il fatto che l’area del trape-zoide relativo ad una funzione continua e positiva e equivalente all’area di unrettangolo avente come base l’intervallo [a, b] ed altezza l’intervallo [0, f(x0)]per un opportuno elemento x0 di ]a, b[ (vedasi la Figura 10.2 successiva).
10.1.4 Primitive ed integrale indefinito
Uno degli strumenti piu efficaci per il calcolo dell’integrale definito di unafunzione viene fornito dalle primitive di una funzione, di cui ci si occupa nelpresente paragrafo.

282 Capitolo 10: Calcolo integrale
x
y
0 x0
Figura 10.2: Teorema della media integrale.
Definizione 10.1.8 Siano X un sottoinsieme di R ed f : X → R unafunzione reale. Si dice che una funzione F : X → R e una primitiva(oppure antiderivata) di f se F e derivabile e, per ogni x ∈ X,
F ′(x) = f(x) .
Inoltre, l’insieme di tutte le primitive di f viene denominato integrale in-definito di f e denotato con uno dei seguenti simboli
∫f ,
∫f(x) dx .
Valgono le seguenti proprieta delle primitive:
1. Siano X e un sottoinsieme di R, f : X → R una funzione reale edF : X → R una primitiva di f. Allora, per ogni c ∈ R, anche lafunzione F + c e una primitiva di f .
Dimostrazione. Infatti F + c e derivabile e, per ogni x ∈ X, (F + c)′(x) =
F ′(x) + 0 = f(x). #
2. Viceversa, se la funzione f e definita in un intervallo, due qualsiasiprimitive di f differiscono sempre per una costante. Precisamente,

10.1 L’integrale secondo Riemann 283
siano I un intervallo di R, f : I → R una funzione reale ed F : I → Re F : I → R due primitive di f . Allora esiste c ∈ R tale che G = F +c.
Dimostrazione. La funzione G − F e derivabile in quanto differenza di funzioni
derivabili e, per ogni x ∈ I, si ha (G− F )′(x) = G′(x)− F ′(x) = f(x)− f(x) = 0.
Poiche I e un intervallo, G−F e costante e quindi esiste c ∈ R tale che G−F = c,
da cui la tesi. #
Il risultato precedente non vale se f non e definita in un intervallo. Adesempio, e facile constatare che la funzione log |x| e una primitiva dellafunzione f(x) := 1/x, x ∈ R " 0, ma tutte le primitive di f non siottengono aggiungendo una costante arbitraria a tale funzione, bensı sonodel tipo
F (x) :=
log |x|+ c1 , x < 0 ,log |x|+ c2 , x > 0 ,
con c1, c2 ∈ R. In generale, per ottenere tutte le primitive e quindi l’integra-le indefinito, bisogna aggiungere una costante arbitraria per ognuno degliintervalli (massimali) in cui la funzione e definita.
Ritornando al caso delle funzioni f : I → R definite in un intervalloI, da quanto osservato segue che, se e nota una primitiva F di f , tutte leprimitive di f si ottengono considerando le funzioni F + c, con c ∈ R epertanto ∫
f = F + c | c ∈ R ;
piu frequentemente si usa scrivere per convenzione∫
f = F (x) + c , c ∈ R ;
in quanto in generale i procedimenti applicati per il calcolo degli integraliindefiniti conducono direttamente all’espressione F (x) della primitiva in ungenerico elemento x in cui questa e definita.
In particolare, se f : I → R e derivabile e se f ′ e continua, risulta∫
f ′(x) dx = f(x) + c , c ∈ R .
Si approfondisce ora lo studio delle proprieta degli integrali indefinitidi una funzione continua. Si puo dimostrare che tali funzioni sono sempredotate di primitive e inoltre vale un importante legame tra l’integrale estesoad un intervallo [a, b] e la differenza dei valori che una primitiva assumenegli estremi b ed a.

284 Capitolo 10: Calcolo integrale
Per enunciare tali proprieta e necessario assumere alcune convenzioniriguardanti le funzioni continue su un intervallo arbitrario di R.
Sia pertanto I un intervallo di R e si consideri una funzione continuaf : I → R. Se a, b ∈ I e a < b, la restrizione f[a,b] di f all’intervallo[a, b] e sicuramente integrabile in [a, b] (Teorema 10.1.5) e quindi ha sensoconsiderare
∫[a,b] f .
Si definisce ora l’integrale definito di f nel modo seguente, per ognia, b ∈ I,
∫ b
af(x) dx :=
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
∫
[a,b]f , a < b ;
0 , a = b ;∫
[b,a]f , a > b .
(10.1.3)
Naturalmente, le proprieta viste in generale per gli integrali estesi ad unintervallo [a, b] si estendono facilmente agli integrali definiti utilizzando ladefinizione precedente e pertanto, per brevita, vengono omesse.
Anche il teorema della media integrale puo essere rienunciato come segueconsiderando gli integrali definiti.
Teorema 10.1.9 (Teorema della media integrale per gli integralidefiniti)Sia f : I → R una funzione continua in un intervallo I. Allora, per ognia, b ∈ I, esiste x0 ∈ I(a, b) tale che
∫ b
af(x) dx = f(x0)(b− a) .
Si studia ora l’esistenza delle primitive per le funzioni continue. Se f :I → R e una funzione continua e se a ∈ I, dalla (10.1.3) si puo considerarela funzione Fa : I → R definita ponendo, per ogni x ∈ I,
Fa(x) =
∫ x
af(t) dt . (10.1.4)
La funzione Fa viene denominata funzione integrale di f di punto inizialea; nel risultato successivo si riconosce che Fa e una primitiva della funzionef .
Teorema 10.1.10 (Teorema fondamentale del calcolo integrale (teo-rema di Torricelli))Siano I un intervallo di R ed f : I → R una funzione continua. Allora, perogni a ∈ I, la funzione Fa : I → R definita dalla (10.1.4) e una primitivadi f .

10.1 L’integrale secondo Riemann 285
Dimostrazione. Bisogna dimostrare che, per ogni x0 ∈ I, Fa e derivabile in x0 e F ′(x0) =f(x0), cioe che
limx→x0
Fa(x)− Fa(x0)
x− x0= f(x0) .
Si fissi pertanto x0 ∈ I e sia ε > 0. Poiche f e continua in x0, si puo considerare δ > 0tale che, per ogni x ∈ I∩]x0 − δ, x0 + δ[, si abbia f(x0)− ε < f(x) < f(x0) + ε.
Si fissi ora x ∈ I∩]x0 − δ, x0 + δ["x0; dal Teorema 10.1.7 della media, esiste unelemento ξ ∈ I(x0, x) tale che
∫ x
x0
f(t) dt = f(ξ)(x0 − x) .
Poiche
Fa(x)− Fa(x0) =
∫ x
af(t) dt−
∫ x0
af(t) dt =
∫ x
x0
f(t) dt = f(ξ)(x0 − x)
si ottieneFa(x)− Fa(x0)
x− x0= f(ξ) .
Inoltre ξ ∈ I∩]x0 − δ, x0 + δ[, e quindi f(x0)− ε < f(ξ) < f(x0)+ ε. Si e cosı dimostratoche, per ogni x ∈ I∩]x0 − δ, x0 + δ[,
f(x0)− ε <Fa(x)− Fa(x0)
x− x0< f(x0) + ε ,
e cio, essendo ε > 0 arbitrario, dimostra la tesi. #
Dunque l’insieme delle primitive di una funzione continua e sempre nonvuoto.
Il risultato successivo mette in relazione le primitive di una funzionecontinua con il calcolo degli integrali definiti.
Teorema 10.1.11 (Formula fondamentale del calcolo integrale)Siano I un intervallo di R, f : I → R una funzione continua e G : I → Runa primitiva di f . Allora, per ogni a, b ∈ I,
∫ b
af(x) dx = G(b)−G(a) . (10.1.5)
Dimostrazione. Siano a, b ∈ I e si consideri la funzione integrale Fa : I → R di f
di punto iniziale a. Dal Teorema 10.1.10, anche Fa e una primitiva di f e quindi, dalle
proprieta generali delle primitive, deve esistere c ∈ R tale che G = Fa+c. Dunque G(b) =
Fa(b)+ c =∫ ba +c e G(a) = Fa(a)+ c = c e pertanto si conclude che G(b)−G(a) =
∫ ba f .
#
Per comodita, il secondo membro della (10.1.5) viene spesso denotatocon uno dei seguenti simboli
[G(x)]ba , G(x)∣∣ba;
cio e dovuto essenzialmente al fatto che nel calcolo esplicito delle primitivedi una funzione si perviene solitamente al valore che essa assume in ungenerico elemento x in cui e definita.

286 Capitolo 10: Calcolo integrale
10.1.5 Integrali indefiniti immediati
Il legame espresso dalla formula fondamentale del calcolo integrale sposta ilproblema del calcolo dell’integrale definito di una funzione continua a quellodella ricerca di una primitiva di tale funzione. Per questo motivo nel seguitoci si occupera in modo piu dettagliato dei metodi per il calcolo degli integraliindefiniti; si cominciano ad esaminare dapprima alcuni integrali indefinitiimmediati che seguono direttamente dalle derivate delle funzioni elementarie successivamente di alcune regole di integrazione.
Dalle derivate delle funzioni elementari, e immediato verificare gli inte-grali indefiniti considerati di seguito.
1. Per ogni a ∈ R, a = −1, risulta∫
xa dx =xa+1
a+ 1+ c , c ∈ R
in ogni intervallo I in cui la funzione xa e definita e precisamente,I = R se a ∈ N, I =]0,+∞[ oppure I =] − ∞, 0[ se a ∈ Z " N,I = [0,+∞[ se a ∈]0,+∞["N e infine I =]0,+∞[ se a ∈]−∞, 0["Z.
2. Si ha ∫1
xdx = log |x|+ c , c ∈ R ,
in ognuno degli intervalli [0,+∞[ oppure ]−∞, 0].
3. Per ogni a ∈]0,+∞["1, risulta∫
ax dx =ax
log a+ c , c ∈ R , x ∈ R .
4. Si ha∫
sinx dx = − cosx+ c ,
∫cosx dx = sinx+ c , c ∈ R , x ∈ R .
5. Si ha ∫1
cos2 xdx = tanx+ c , c ∈ R ,
in ognuno degli intervalli ]− π/2 + kπ,π/2 + kπ[, k ∈ Z e
∫1
sin2 xdx = − cotx+ c , c ∈ R ,
in ognuno degli intervalli ]kπ,π + kπ[, k ∈ Z.

10.1 L’integrale secondo Riemann 287
6. Si ha∫
1√1− x2
dx = arcsinx+c = − arccosx+c , c ∈ R , x ∈]−1, 1[ .
7. Si ha∫
1
1 + x2dx = arctanx+ c = −arccotx+ c , c ∈ R , x ∈ R .
Se f : I → R e una funzione derivabile in un intervallo I, le formuleprecedenti possono essere generalizzate componendo la funzione f con unadelle funzioni elementari sopra considerate.
Per brevita non vengono ripetuti tutti i casi precedenti ma si riportanosolamente alcuni esempi, anche in previsione del fatto che l’applicazionedella successiva regola di sostituzione consentira di ottenere risultati piugenerali.
1. Si ha ∫f ′(x)
f(x)dx = log |f(x)|+ c , c ∈ R ,
purche f(x) > 0 per ogni x ∈ I oppure f(x) < 0 per ogni x ∈ I.
2. Per ogni a ∈]0,+∞["1, risulta∫
af(x) f ′(x) dx =af(x)
log a+ c , c ∈ R , x ∈ I .
3. Si ha∫
sin f(x) f ′(x) dx = − cos f(x) + c , c ∈ R , x ∈ I .
4. Si ha ∫1
cos2 f(x)f ′(x) dx = tan f(x) + c , c ∈ R ,
purche esista k ∈ Z tale che −π/2 + kπ < f(x) < π/2 + kπ per ognix ∈ I.
Le precisazioni effettuate di volta in volta sulla validita delle formuleprecedenti sono indispensabili per il calcolo degli integrali definiti mediantela formula fondamentale del calcolo integrale. Il calcolo degli integrali inde-finiti puo invece essere esteso a funzioni definite nell’unione di piu intervalliconsiderando una costante arbitraria in ognuno di essi.

288 Capitolo 10: Calcolo integrale
10.1.6 Prime regole di integrazione
Per estendere il calcolo degli integrali indefiniti, e necessario ricorrere adopportune regole di integrazione di seguito esposte.
Una prima regola di integrazione puo essere ricavata direttamente dallaproprieta di linearita dell’integrale definito (Proposizione 10.1.6, 1.); taleregola puo essere enunciata ovviamente anche per gli integrali indefiniti e sienuncia come segue
Se f, g : I → R sono funzioni continue ed α,β ∈ R, allora∫(αf(x) + βg(x)) dx = α
∫f(x) dx+ β
∫g(x) dx .2
Si considerano ora due ulteriori regole di integrazione di frequente ap-plicazione.
Proposizione 10.1.12 (Regola di integrazione per sostituzione)
1. (Formula di cambiamento di variabile per gli integrali definiti). Siaϕ : [a, b] → R una funzione derivabile con derivata continua e sia f :I → R una funzione continua in un intervallo I tale che ϕ([a, b]) ⊂ I.Allora ∫ b
af(ϕ(x))ϕ′(x) dx =
∫ ϕ(b)
ϕ(a)f(t) dt .
2. Siano I e J intervalli di R, ϕ : J → R una funzione derivabile conderivata continua ed f : I → R una funzione continua tale che ϕ(J) ⊂I. Se F : I → R e una primitiva di f , allora
∫f(ϕ(x))ϕ′(x) dx = F (ϕ(x)) + c , c ∈ R .
Dimostrazione. Si osserva innanzitutto che la funzione (f ϕ) · ϕ′ e continua e quindie integrabile per il Teorema 10.1.5. Si considerino ora le funzioni F : [a, b] → R eG : [a, b] → R definite ponendo, per ogni y ∈ [a, b],
F (y) :=
∫ y
ϕ(a)f(t) dt , G(y) :=
∫ y
af(ϕ(x))ϕ′(x) dx .
2Ricordando che l’integrale indefinito e un insieme di funzioni, si precisa che il prodottoα ·A di uno scalare per un sottoinsieme e da intendersi come α ·A := αa | a ∈ A; inoltrela somma di due insiemi che e da intendersi al modo seguente: A + B := a + b | a ∈A , b ∈ B. Quindi, nel caso in esame, il secondo membro significa
α
∫f(x) dx+ β
∫g(x) dx =
αF + βG | F ∈
∫f(x) dx , G ∈
∫g(x) dx .
10.1 L’integrale secondo Riemann 289
Dal teorema fondamentale del calcolo integrale (Teorema 10.1.10), la funzione F e unaprimitiva di f e la funzione G e una primitiva di (f ϕ) · ϕ′. Poiche, per ogni t ∈ [a, b],risulta anche (F ϕ)′(t) = F ′(ϕ(t))ϕ′(t) = f(ϕ(t))ϕ′(t), le funzioni G ed F ϕ devonodifferire per una costante; essendo, poi, G(a) = 0 e F (ϕ(a)) = 0, tale costante deve esserenulla e si ottiene G = F ϕ; in particolare G(b) = F (ϕ(b)) da cui la tesi.
2) Basta osservare che F ϕ e una primitiva di (f ϕ) · ϕ′. #
Nelle applicazioni concrete e come se si effettuasse materialmente la so-stituzione t = ϕ(x) e si sostituisse il differenziale ϕ′(x) dx con dt (spessosi scrive dϕ(x) anziche ϕ′(x)dx). L’uguaglianza ϕ′(x) dx = dt si ottieneformalmente derivando entrambi i membri dell’uguaglianza t = ϕ(x) rispet-to alla variabile t a primo membro ed alla variabile x a secondo membro.Tali osservazioni giustificano la denominazione attribuita alla Proposizione10.1.12. Nelle applicazioni riguardanti il calcolo degli integrali definiti, sipuo scegliere se determinare dapprima una primitiva della funzione da inte-grare e quindi applicare la formula fondamentale del calcolo integrale oppurese applicare direttamente la parte 1) della Proposizione 10.1.12 cambiandoanche gli estremi di integrazione nell’integrale assegnato.
Proposizione 10.1.13 (Regola di integrazione per parti)Siano I un intervallo di R, f : I → R una funzione continua e g : I → R unafunzione derivabile con derivata continua. Se F : I → R e una primitiva dif , si ha ∫
f(x) g(x) dx = F (x) g(x)−∫
F (x) g′(x) dx .
e conseguentemente, per ogni a, b ∈ I,∫ b
af(x) g(x) dx =
[F (x) g(x)
]ba−∫ b
aF (x) g′(x) dx .
Dimostrazione. Dalla regola di derivazione del prodotto di due funzioni risulta (F ·g)′ =F ′ · g + F · g′ = f · g + F · g′ e quindi f · g = (F · g)′ − F · g′; poiche le funzioni f · ge (F · g)′ − F · g′ sono definite nell’intervallo I, le primitive di f · g coincidono con le
primitive di (F · g)′ −F · g′; ma F · g e una primitiva di (F · g)′ e pertanto le primitive di
(F · g)′ − F · g′ sono date dalla differenza di F · g e le primitive di F · g′ e da cio deriva
la tesi. L’ultima parte segue direttamente da quanto dimostrato. #
Ad esempio, si vuole calcolare il seguente integrale definito∫ e
1log x dx .
Si determina dapprima l’integrale indefinito. Dalla regola di integrazioneper parti, si ha∫
log x dx =
∫1 · log x dx = x log x−
∫xD(log x) dx = x log x− x+ c ,

290 Capitolo 10: Calcolo integrale
con c ∈ R. Allora, scegliendo la primitiva con c = 0, dalla formula fonda-mentale del calcolo integrale (Teorema 10.1.11) l’integrale definito assegnatoe dato da
∫ e
1log x dx =
[x log x− x
]e1= e− e− (−1) = 1 .
L’integrale seguente viene calcolato in maniera analoga
∫arctanx dx =
∫1 · arctanx dx
= x arctanx−∫
x
1 + x2dx
= x arctanx− 1
2log(1 + x2) + c ,
con c ∈ R. Nell’ultima uguaglianza si e utilizzato l’integrale indefinito
immediato
∫f ′(x)
f(x)dx = log |f(x)|+ c.
Si consideri ora l’integrale indefinito
∫sinx cosx
sin4 x+ cos4 xdx .
In ogni intervallo ]− π/2 + kπ,π/2 + kπ[ con k ∈ Z, si puo scrivere
∫sinx cosx dx
sin4 x+ cos4 x=
∫sinx cosx dx
cos4 x(1 + tan4 x)=
∫tanx dx
cos2 x(1 + (tan2 x)2
)
e quindi, posto t = tan2 x, da cui dt = 2 tanx dx/ cos2 x, si ottiene
∫sinx cosx
sin4 x+ cos4 xdx =
1
2
∫1
1 + t2dt =
1
2arctan t+ c =
1
2arctan tan2 x+ c
con c ∈ R. Anche se la funzione assegnata e definita in tutto R, in questocaso e stato possibile determinare un primitiva solamente in ogni intervallo]− π/2 + kπ,π/2 + kπ[ con k ∈ Z.
10.2 Integrazione delle funzioni razionali
Una classe abbastanza ampia di funzioni per le quali e possibile stabilireun metodo generale per il calcolo dell’integrale indefinito e costituita dalle

10.2 Integrazione delle funzioni razionali 291
funzioni razionali, cioe delle funzioni rapporto di due polinomi. Nella pre-sente sezione si espone sinteticamente il metodo generale per il calcolo diun integrale della forma ∫
P (x)
Q(x)dx ,
dove, per ogni x ∈ R,
P (x) = a0 + a1x+ · · ·+ anxn , a0, . . . , an ∈ R , an = 0 ,
Q(x) = b0 + b1x+ · · ·+ bmxm , b0, . . . , bm ∈ R , bm = 0 ,
e si suppone n < m in quanto ci si puo sempre ricondurre a questo casoeffettuando la divisione dei polinomi P e Q.
10.2.1 Caso m = 1
In questo caso Q(x) = ax+ b con a = 0 e si ottiene l’integrale∫
1
ax+ bdx = log |ax+ b|+ C , C ∈ R ,
in ognuno degli intervalli ]−∞,−b/a[ e ]− b/a,+∞[.
10.2.2 Caso m = 2
In questo caso Q(x) = ax2 + bx + c con a = 0 e P puo essere di grado 0oppure 1.
Si considera innanzitutto il seguente tipo di integrale∫
1
ax2 + bx+ cdx .
Posto ∆ = b2 − 4ac, si procede come segue:
• Caso ∆ > 0. Denotate con x1 e x2 le due soluzioni reali distinte e taliche x1 < x2 dell’equazione ax2+bx+c = 0 e imponendo l’uguaglianza
1
ax2 + bx+ cdx =
A
x− x1+
B
x− x2
si determinano le costanti A e B e quindi l’integrale diventa∫
1
ax2 + bx+ cdx = A log |x− x1|+B log |x− x2|+ C ,
dove la costante arbitraria C dipende da ognuno degli intervalli ] −∞, x1[, ]x1, x2[ e ]x2,+∞[.

292 Capitolo 10: Calcolo integrale
• Caso ∆ = 0. Denotata con x0 l’unica soluzione reale dell’equazioneax2 + bx+ c = 0, si ha ax2 + bx+ c = a(x− x0)2 e quindi
∫1
ax2 + bx+ cdx =
∫1
a(x− x0)2dx = − 1
a(x− x0)+ C ,
dove la costante arbitraria C dipende da ognuno degli intervalli ] −∞, x0[ e ]x0,+∞[.
• Caso ∆ < 0. Con semplici manipolazioni algebriche si scrive
1
ax2 + bx+ c=
2√−∆
2a(2ax+ b√−∆
)2
+ 1
e quindi
∫1
ax2 + bx+ cdx =
2√−∆
arctan2ax+ b√−∆
+ C ,
con C costante arbitraria in tutto R.
Si considera ora il caso in cui P (x) = mx + n, con m = 0, ha grado 1.In questo caso si ottiene
∫mx+ n
ax2 + bx+ cdx =
m
2a
∫2ax+ b
ax2 + bx+ cdx+
(n− mb
2a
)∫1
ax2 + bx+ cdx
=m
2alog |ax2 + bx+ c|+
(n− mb
2a
)∫1
ax2 + bx+ cdx
e l’ultimo integrale viene risolto come nel caso precedente.
10.2.3 Caso m > 2
Il polinomioQ puo essere decomposto nella seguente forma (vedasi la (3.5.7))
Q(x) = bm(x− x1)h1 · · · (x− xp)
hp(x2 + b1x+ c1)k1 · · · (x2 + bqx+ cq)
kq ,
dove x1, . . . , xp sono le radici reali di Q aventi rispettivamente molteplicitah1, . . . , hp, e k1, . . . , kq sono le molteplicita delle radici complesse coniugatedei termini x2+ b1x+ c1, . . . , x2+ bqx+ cq con ∆1 = b21− 4c1 < 0, . . . ,∆q =b2q−4cq < 0. Poiche la somma di tutte le molteplicita deve essere m, si deveavere
h1 + · · ·+ hp + 2(k1 + · · ·+ kq) = m .

10.2 Integrazione delle funzioni razionali 293
Il rapporto P (x)/Q(x) viene decomposto facendo corrispondere ad ognifattore x− xr un addendo della forma
Ar
x− xr
con Ar costante da determinare e ad ogni fattore x2 + bsx + cs = 0 unaddendo della forma
Bsx+ Cs
x2 + bsx+ cs
con Bs e Cs costanti da determinare; infine si tiene conto della molteplicitaconsiderando un addendo ulteriore della forma
M(x) =d
dx
Γ(x)
R(x),
dove al denominatore figurano tutti i fattori con molteplicita diminuita diuna unita (quindi non figurano i fattori con molteplicita 1):
R(x) = (x−x1)h1−1 · · · (x−xp)
hp−1(x2+b1x+c1)k1−1 · · · (x2+bqx+cq)
kq−1
e al numeratore il polinomio Γ ha grado uguale a quello del denominatorediminuito di una unita
Γ(x) = γ0 + γ1x+ · · ·+ γtxt
con t = (h1− 1)+ · · ·+(hp− 1)+2(k1− 1)+ · · ·+2(kq− 1)− 1 e le costantiγ1, . . . , γt sono da determinare.
Tutte le costanti vengono determinate imponendo nella uguaglianza
P (x)
Q(x)=
A1
x− x1+ · · ·+ Ap
x− xp+
B1x+ C1
x2 + b1x+ c1+ · · ·+ Bqx+ Cq
x2 + bqx+ cq+M(x)
che i coefficienti dello stesso grado coincidano e in questo modo si ottieneun sistema lineare di p+ 2q + t+ 1 equazioni in p+ 2q + t+ 1 incognite ilcui determinante dei coefficienti e diverso da 0.
Pertanto l’integrale diventa
∫P (x)
Q(x)dx =A1 log |x− x1|+ · · ·+Ap log |x− xp|
+
∫B1x+ C1
x2 + b1x+ c1dx+ · · ·+
∫Bqx+ Cq
x2 + bqx+ cqdx+
Γ(x)
R(x)
dove tutti gli integrali da calcolare rientrano nei casi gia discussi.
294 Capitolo 10: Calcolo integrale
10.3 Integrali impropri
La definizione di funzione integrabile secondo Riemann e stata data inizial-mente per funzioni limitate e definite in un intervallo chiuso e limitato. Sivuole ora estendere tale definizione anche al caso di funzioni non limitateoppure definite in un insieme non limitato; in tal caso si parlera di integraliin senso improprio (oppure anche in senso generalizzato).
10.3.1 Integrali impropri di funzioni non limitate
Si considera innanzitutto il caso di funzioni non necessariamente limitatedefinite pero su un intervallo chiuso e limitato.
Nel seguito, si intende fissato un intervallo [a, b] con a, b ∈ R, a < b e siprendono in esame le funzioni che soddisfano la condizione seguente.
Definizione 10.3.1 Una funzione reale f : [a, b]→ R si dice generalmentecontinua se ammette al piu un numero finito di punti di discontinuita.
Poiche l’integrale definito di una funzione e invariante rispetto ad in-siemi finiti, non e importante per i nostri fini il valore che una funzionegeneralmente continua assume nei punti di discontinuita; in tali punti, anzi,la funzione potrebbe anche non essere definita. Precisamente, se H e unsottoinsieme finito di [a, b] e se f : [a, b] " H → R e continua, essa puoessere considerata come funzione generalmente continua in [a, b] identifican-dola con una qualsiasi funzione definita anche in H e che coincide con f in[a, b]"H.
Ad esempio, la funzione f(x) = 1/ log x e una funzione generalmentecontinua nell’intervallo [0, 1], in quanto attribuendole un valore arbitrarionei punti 0 e 1, tali punti risultano gli unici suoi punti di discontinuita in[0, 1].
Per estendere la definizione di integrale definito a tali funzioni, si con-sidera innanzitutto il caso in cui f : [a, b] → R abbia un unico punto didiscontinuita in uno degli estremi.
Definizione 10.3.2 Sia f : [a, b]→ R una funzione generalmente continuae si supponga che a (rispettivamente, b) sia l’unico punto di discontinuitadi f .
Se esiste il seguente limite
limε→0+
∫ b
a+εf(x) dx , (rispettivamente, lim
ε→0+
∫ b−ε
af(x) dx ), (10.3.1)
esso viene denominato integrale improprio di f e denotato con il simbolo∫ b
af(x) dx .

10.3 Integrali impropri 295
Si osservi che f e integrabile in [a + ε, b] (rispettivamente, in [a, b − ε]) inquanto continua in tale intervallo.
Inoltre, se il limite (10.3.1) e un numero reale si dice anche che l’in-tegrale improprio di f in [a, b] e convergente oppure che f e integrabile insenso improprio in [a, b]; se il limite (10.3.1) e infinito, si dice che l’integraleimproprio di f in [a, b] e divergente.
Se f : [a, b] → R e continua in [a, b] " x0, con x0 ∈]a, b[, l’integraleimproprio puo essere definito applicando la Definizione 10.3.2 separatamentealle restrizioni f|[a,x0] e f|[x0,b]. Si richiede quindi che esistano entrambi ilimiti
limε→0+
∫ x0−ε
af(x) dx , lim
ε→0+
∫ b
x0+εf(x) dx . (10.3.2)
Se tali limiti sono finiti, si dice che la funzione e integrabile in sensoimproprio in [a, b] oppure che l’integrale improprio di f e convergente; seuno dei due limiti e finito e l’altro e uguale a +∞ (rispettivamente, a −∞)oppure se i due limiti sono entrambi uguali a +∞ (rispettivamente, ugualia −∞), si dice che l’integrale improprio di f e divergente positivamente(rispettivamente, negativamente).
Se f e integrabile in senso improprio in [a, b], dal primo teorema sullimite della somma di due funzioni (Teorema 6.5.1), il valore dell’integralepuo essere calcolato considerando il limite
∫ b
af(x) dx = lim
ε→0+
(∫ x0−ε
af(x) dx+
∫ b
x0+εf(x) dx
). (10.3.3)
Tuttavia, l’integrabilita in senso improprio di f non puo essere dedottadal fatto che l’ultimo limite sia finito; infatti, tale limite puo essere finitoanche se i due limiti (10.3.1) sono uno divergente positivamente e l’altronegativamente; in tal caso, il limite (10.3.3) viene comunque denominatovalore principale dell’integrale improprio di f e denotato con uno dei simboli
(v.p.)
∫ b
af(x) dx , ∗
∫ b
af(x) dx .
Ad esempio, si consideri la funzione generalmente continua 1/x nell’in-tervallo [−1, 1]; si ha
limε→0+
∫ 1
ε
1
xdx = lim
ε→0+[log x]1ε = lim
ε→0+− log ε = +∞ ,

296 Capitolo 10: Calcolo integrale
e quindi tale funzione non puo essere integrabile in senso improprio in[−1, 1]; risulta inoltre
limε→0+
(∫ −ε
−1
1
xdx+
∫ 1
ε
1
xdx
)= limε→0+
([log−x]−ε−1 + [log x]1ε
)= 0
e quindi (v.p.)∫ 1−1
1x dx = 0.
Se f : [a, b]→ R e una funzione generalmente continua discontinua in npunti x1, . . . xn ∈ [a, b], l’integrabilita in senso improprio di f viene defini-ta applicando quanto sopra separatamente a ciascuno dei punti x1, . . . xn;precisamente, si consideri una suddivisione y0, . . . , yn di [a, b] in n intervallitali che ogni xi appartenga solamente all’intervallo [yi−1, yi], i = 1, . . . , n,allora si dice che f e integrabile in senso improprio in [a, b] oppure che l’in-tegrale improprio di f e convergente se, per ogni i = 1, . . . , n, la restrizionedi f all’intervallo [yi−1, yi] (che presenta un solo punto di discontinuita) eintegrabile in senso improprio in [yi−1, yi], cioe esistono e sono finiti i limiti
limε→0+
∫ xi−ε
yi−1
f(x) dx , limε→0+
∫ yi
xi+εf(x) dx
(ovviamente, il primo limite non va considerato se xi = a e il secondose xi = b). Se qualcuno dei limiti precedenti e divergente positivamente(rispettivamente, negativamente) ed i rimanenti sono convergenti, si diceche l’integrale improprio di f e divergente positivamente (rispettivamente,negativamente).
In base alle definizioni assunte, si puo studiare l’integrabilita in sensoimproprio nel caso di un unico punto di discontinuita; i criteri ottenuti vannopoi applicati separatamente a ciascun punto di discontinuita di f (affinchef sia integrabile in senso improprio e necessario che lo sia rispetto a ciascunpunto di discontinuita).
Osservazione 10.3.3 Si riconoscono facilmente alcune proprieta relativealle operazioni sulle funzioni integrabili in senso improprio; ad esempio,si enunciano le seguenti omettendone per brevita la dimostrazione, basataessenzialmente sulle definizioni assunte:
1. Se f : [a, b] → R e una funzione generalmente continua dotata dipunti di discontinuita solamente eliminabili o di prima specie, essa eintegrabile in senso improprio in [a, b]. Quindi, i punti di discontinuitain un intorno dei quali puo fallire l’integrabilita della funzione sonoquelli di seconda specie, che per tale motivo vengono denominati anchepunti singolari della funzione.
10.3 Integrali impropri 297
2. Se f : [a, b] → R e g : [a, b] → R sono funzioni generalmente continueintegrabili in senso improprio in [a, b], allora la somma f+g e anch’essaintegrabile in senso improprio in [a, b] e si ha
∫ b
a(f(x) + g(x)) dx =
∫ b
af(x) dx+
∫ b
ag(x) dx .
3. Se f : [a, b] → R e g : [a, b] → R sono funzioni generalmente continueintegrabili in senso improprio in [a, b] e se esiste un sottoinsieme finitoH di [a, b] tale che, per ogni x ∈ [a, b] "H, f(x) ≤ g(x), allora si haanche ∫ b
af(x) dx ≤
∫ b
ag(x) dx .
4. Sia f : [a, b]→ R una funzione generalmente continua e positiva, inte-grabile in senso improprio in [a, b]; considerato l’insieme finito H deipunti di discontinuita di f , si definisce il trapezoide T (f) := (x, y) ∈R2 | x ∈ [a, b]"H , 0 ≤ y ≤ f(x). Allora
∫ ba f(x) dx = Area (T (f)).
Per i criteri successivi risulta utile la definizione seguente.
Definizione 10.3.4 Sia f : [a, b] → R una funzione generalmente conti-nua. Si dice che f e assolutamente integrabile in senso improprio in [a, b]se la funzione |f | e integrabile in senso improprio in [a, b]. Inoltre, si di-ce che l’integrale improprio di f e assolutamente divergente se l’integraleimproprio di |f | e divergente positivamente.
Si supponga che f : [a, b] → R sia continua in ]a, b]. Poiche |f | epositiva, la funzione g :]a, b] → R definita ponendo, per ogni x ∈]a, b],g(x) :=
∫ bx |f(t)| dt e decrescente e quindi, per il teorema sul limite delle
funzioni monotone (Teorema 6.6.1), e dotata di limite nel punto a dato da
supx∈]a,b]
∫ bx |f(t)| dt.
Pertanto, l’integrale improprio di |f | e necessariamente convergente op-pure divergente positivamente.
Lo stesso discorso puo essere applicato nel caso in cui f non sia continuain b oppure in uno o piu punti interni all’intervallo [a, b].
Quindi, si puo concludere che una funzione generalmente continua risultao assolutamente integrabile in senso improprio oppure l’integrale in sensoimproprio e assolutamente divergente.
Per questo motivo per indicare che una funzione e assolutamente inte-grabile in senso improprio e sufficiente scrivere
∫ b
a|f(x)| dx < +∞ .
298 Capitolo 10: Calcolo integrale
Se f e positiva, l’assoluta integrabilita equivale ovviamente all’integra-bilita in senso improprio.
In generale, si puo solamente affermare che se f : [a, b] → R e una fun-zione generalmente continua e assolutamente integrabile in senso improprioin [a, b], allora f e integrabile in senso improprio in [a, b] e si ha
∣∣∣∣∣
∫ b
af(x) dx
∣∣∣∣∣ ≤∫ b
a|f(x)| dx .
Vale inoltre il seguente criterio di confronto.
Proposizione 10.3.5 (Criterio di confronto per gli integrali impro-pri)Siano f : [a, b] → R e g : [a, b] → R funzioni generalmente continue e sisupponga che, per ogni x ∈ [a, b], |f(x)| ≤ g(x). Si ha
1. Se g e integrabile in senso improprio, allora f e assolutamente inte-grabile in senso improprio.
2. Se l’integrale improprio di f e assolutamente divergente, allora anchel’integrale improprio di g e divergente positivamente.
Dimostrazione. 1) La prima parte segue dalle definizioni applicando la proprieta di
monotonia dell’integrale definito e del limite. La seconda parte segue invece direttamente
dalla prima. #
Esempio 10.3.6 (Integrali impropri campione) Siano x0 ∈ [a, b] e α > 0.Si consideri la funzione f : [a, b] " x0 → R definita ponendo, per ognix ∈ [a, b]" x0,
f(x) :=1
|x− x0|a.
Si tratta di una funzione generalmente continua in [a, b] avente x0 comeunico punto di discontinuita. Si supponga x0 < b; per ogni ε > 0, se α = 1
∫ b
x0+ε
1
|x− x0|αdx = [log |x− x0|]bx0+ε
= log(b− x0)− log ε ,
mentre, se α = 1,
∫ b
x0+ε
1
|x− x0|αdx =
1
−α+ 1
[|x− x0|−α+1
]bx0+ε
=1
−α+ 1
((b− x0)
−α+1 − ε−α+1).
10.3 Integrali impropri 299
Si deduce allora che
limε→0+
∫ b
x0+ε
1
|x− x0|αdx =
⎧⎪⎨
⎪⎩
(b− x0)1−α
1− α , 0 < α < 1 ,
+∞ , α ≥ 1 .
Le stesse conclusioni valgono se si suppone a < x0 e si considera∫ x0−εa 1/|x−
x0|α dx. Quindi f e integrabile in senso improprio in [a, b] se 0 < α < 1,mentre non lo e se α ≥ 1.
Utilizzando l’esempio e il criterio di confronto precedenti si ottiene ilseguente risultato di frequente applicazione.
Teorema 10.3.7 (Criterio dell’ordine di infinito)Sia f : [a, b]→ R una funzione continua in [a, b]" x0, con x0 ∈ [a, b]. Siha
1. Se f e un infinito in x0 di ordine minore o uguale di α, con α ∈]0, 1[ (oppure se f non e un infinito in x0), allora f e assolutamenteintegrabile in senso improprio in [a, b].
2. Se f e un infinito in x0 di ordine maggiore o uguale di 1, alloral’integrale improprio di f e assolutamente divergente.
Dimostrazione. 1) Dalle ipotesi fatte, esistono δ > 0 ed M ∈ R tali che, per ognix ∈ [a, b]∩]x0 − δ, x0 + δ[, |f(x)| ≤ M/|x − x0|α (cio vale anche se f non e un infinitoin x0 considerando α ∈]0, 1[ arbitrario). Poiche α < 1, dall’Esempio 10.3.6 e dallaProposizione 10.3.5, 1), segue che f e assolutamente integrabile in senso improprio in[a, b].
2) Dal fatto che f e un infinito in x0 di ordine maggiore o uguale di 1, si deduce l’esistenza
di δ > 0 ed M ∈ R tali che, per ogni x ∈ [a, b]∩]x0−δ, x0+δ[, |f(x)| ≥ M/|x−x0|. Ancora
dall’Esempio 10.3.6 e dalla Proposizione 10.3.5, 2), segue che l’integrale improprio di f e
assolutamente divergente. #
In generale, per stabilire l’integrabilita in senso improprio di una funzio-ne generalmente continua, si cerca prima di applicare il Teorema 10.3.7 inognuno dei punti di discontinuita per f . Se si trova un punto di discontinuitain cui vale la parte 2), si conclude subito che la funzione non e integrabilein senso improprio. Se invece in tutti i punti di discontinuita e soddisfattala parte 1), la funzione e integrabile in senso improprio in [a, b].
Puo capitare che in qualche punto il criterio dell’ordine di infinito non sipossa applicare, cioe che la funzione sia un infinito in un punto x0 di ordineminore di 1, ma maggiore di α per ogni α ∈]0, 1[.
In questi casi bisogna ricorrere ad altri metodi per lo studio dell’inte-grabilita, ad esempio, rifacendosi direttamente alle definizioni assunte. Si

300 Capitolo 10: Calcolo integrale
osserva infine che i criteri di integrabilita in senso improprio, nel caso incui possano essere applicati, consentono di stabilire solamente l’integrabi-lita della funzione ma non forniscono il valore dell’integrale improprio, per ilquale bisogna in generale utilizzare la definizione ed i metodi di integrazioneper gli integrali definiti.
Ad esempio, si consideri l’integrale improprio
∫ 1/2
0
1
x logn xdx , n ≥ 1 .
Nel punto 0 la funzione e un infinito di ordine minore di 1, ma di ordinemaggiore di α per ogni 0 < α < 1 e pertanto il criterio sull’ordine di infinitonon puo essere applicato (l’ordine minore di 1 esclude la seconda parte el’ordine maggiore di α per ogni 0 < α < 1 esclude la prima parte delteorema).
Pertanto, si ricorre direttamente alla definizione. Se n = 1 si ha, perogni ε > 0,
∫ 1/2
ε
1
x log xdx = [log | log x|]1/2ε = log log 2− log | log ε| ,
mentre, se n ≥ 2,
∫ 1/2
ε
1
x logn xdx =
[log−n+1 x
−n+ 1
]1/2
ε
= − 1
n− 1
(log−n+1 1
2− log−n+1 ε
).
Si deduce che
∫ 1/2
0
1
x logn xdx =
⎧⎨
⎩
1
(n− 1) logn−1 2, n ≥ 2 ,
−∞ , n = 1 .
Quindi l’integrale improprio e convergente se e solo se n ≥ 2.
Si consideri l’integrale improprio
∫ 1
0
√(1− ex) log x
sin(πx)dx .
La funzione in esame e generalmente continua e non e definita nei punti0 e 1. Per quanto riguarda il punto 0, la funzione
√(1− ex) log x e un
infinitesimo di ordine minore di 1/2, ma maggiore di ogni numero stretta-mente positivo minore di 1/2, mentre la funzione sinπx e un infinitesimo diordine 1. Si deduce che il rapporto e un infinito di ordine maggiore di 1/2

10.3 Integrali impropri 301
ma minore di ogni numero maggiore di 1/2, ad esempio di 3/4; dal criteriodell’ordine di infinito (Teorema 10.3.7), segue l’assoluta integrabilita dellafunzione in un intorno del punto 0.
Nel punto 1 la funzione al numeratore e un infinitesimo di ordine 1/2 equella al denominatore e un infinitesimo di ordine 1; il rapporto e quindi uninfinito di ordine 1/2 e la funzione e integrabile nel punto 1 sempre per ilcriterio dell’ordine di infinito.
Poiche si e stabilita l’integrabilita della funzione in ogni punto di discon-tinuita, si conclude che essa e integrabile. Tuttavia le regole di integrazio-ne note non consentono in questo caso di calcolare il valore dell’integraleimproprio.
Si consideri l’integrale improprio
∫ π
0(2x− π) tanx dx .
L’unico punto di discontinuita da discutere in questo caso e il punto π/2,nel quale la funzione e un il prodotto di un infinitesimo di ordine 1 e di uninfinito di ordine 1; pertanto in tale punto la funzione non e un infinito ede di conseguenza integrabile in senso improprio in [0,π].
Si consideri l’integrale improprio
∫ 1
0
log2(1− x)
1− xdx .
Vi e solamente il punto 1 da discutere; in tale punto la funzione e ilrapporto di un infinito di ordine arbitrariamente piccolo e di un infinitesimodi ordine 1; quindi e un infinito di ordine maggiore di 1 (e minore di 1 + εper ogni ε > 0); dal criterio dell’ordine di infinito, tenendo presente che lafunzione e positiva, l’integrale improprio e divergente positivamente.
10.3.2 Integrali impropri su intervalli non limitati
Si considera ora il caso di funzioni definite in un intervallo illimitato. Ladiscussione e analoga al caso precedente e per questo motivo si tralascerannoalcuni dettagli in caso di completa analogia.
Definizione 10.3.8 Sia f : [a,+∞[→ R (rispettivamente, f :]−∞, b]→ R)una funzione continua. Se esiste il limite
limb→+∞
∫ b
af(x) dx , (rispettivamente, lim
a→−∞
∫ b
af(x) dx ), (10.3.4)

302 Capitolo 10: Calcolo integrale
esso viene denominato integrale improprio di f in [a,+∞[ (rispettivamente,in ]−∞, b]) e denotato con uno dei simboli
∫ +∞
af(x) dx ,
∫ +∞
af , (rispettivamente,
∫ b
−∞f(x) dx ,
∫ b
−∞f ).
Inoltre, se il limite (10.3.4) e un numero reale si dice anche che l’integraleimproprio di f e convergente oppure che f e integrabile in senso impro-prio; se il limite (10.3.4) e infinito, si dice che l’integrale improprio di f edivergente.
Se f : R→ R e una funzione continua, si dira poi che essa e integrabilein senso improprio in R se esistono e sono finiti entrambi i limiti
limb→+∞
∫ b
cf(x) dx , lim
a→−∞
∫ c
af(x) dx , (10.3.5)
dove c ∈ R e fissato arbitrariamente. In tal caso l’integrale improprio di fpuo essere calcolato anche considerando il limite
∫ +∞
−∞f(x) dx = lim
a→+∞
∫ a
−af(x) dx ; (10.3.6)
Anche ora conviene osservare che l’esistenza del limite (10.3.6) non com-porta in generale che f sia integrabile in senso improprio in tutto R.
Se uno dei limiti (10.3.5) tende a ±∞ e l’altro ad un numero reale,oppure se tendono entrambi a +∞ o a −∞, si dice che l’integrale impropriodi f e divergente (positivamente o negativamente).
Una situazione piu generale e quella in cui la funzione e generalmentecontinua in un intervallo illimitato. In questo caso l’integrabilita in sensoimproprio viene considerata separatamente in un intorno di ogni punto didiscontinuita ed eventualmente nei punti +∞ e −∞; e sufficiente che l’in-tegrabilita fallisca in un intorno di tali punti per concludere che la funzionenon e integrabile in senso improprio.
Per quanto osservato, si puo ora trattare separatamente solamente ilcaso di funzioni continue su intervalli illimitati.
Nel seguito si considera l’intervallo [a,+∞[; considerazioni analoghevalgono in ]−∞, b] ed R.
Si possono stabilire proprieta analoghe a quelle enunciate per gli integraliimpropri di funzioni limitate.
1. Se f : [a,+∞[→ R e g : [a,+∞[→ R sono funzioni continue integra-bili in senso improprio in [a,+∞[, allora la somma f + g e anch’essa
10.3 Integrali impropri 303
integrabile in senso improprio in [a,+∞[ e si ha
∫ +∞
a(f(x) + g(x)) dx =
∫ +∞
af(x) dx+
∫ +∞
ag(x) dx .
2. Se f : [a,+∞[→ R e g : [a,+∞[→ R sono funzioni continue integrabiliin senso improprio in [a,+∞[ e se, per ogni x ∈ [a, b], f(x) ≤ g(x),allora si ha anche
∫ +∞
af(x) dx ≤
∫ +∞
ag(x) dx .
3. Se f : [a,+∞[→ R e una funzione continua e positiva, integrabile insenso improprio in [a,+∞[, considerato il trapezoide T (f) := (x, y) ∈R2 | x ≥ a , 0 ≤ y ≤ f(x), si ha
∫ +∞a f(x) dx = Area (T (f)).
L’assoluta integrabilita viene definita come in precedenza.Se f : [a,+∞[→ R e una funzione continua, si dice che f e assolutamente
integrabile in senso improprio in [a,+∞[ se la funzione |f | e integrabile insenso improprio in [a,+∞[.
Inoltre, si dice che l’integrale improprio di f e assolutamente divergentese l’integrale improprio di |f | e divergente positivamente.
Anche ora, dal teorema sul limite delle funzioni monotone, si deduce cheuna funzione continua f : [a,+∞[→ R o e assolutamente integrabile in sensoimproprio oppure il suo integrale improprio e assolutamente divergente; perevidenziare il fatto che una funzione e assolutamente integrabile in sensoimproprio si scrive solitamente
∫ +∞a |f(x)|dx < +∞.
Ovviamente, le nozioni di assoluta integrabilita in senso improprio e diintegrabilita in senso improprio sono equivalenti se la funzione e positiva.In generale, si puo solamente dire che se f : [a,+∞[→ R e una funzionecontinua e assolutamente integrabile in senso improprio in [a,+∞[, allora fe integrabile in senso improprio in [a,+∞[ e si ha
∣∣∣∣∫ +∞
af(x) dx
∣∣∣∣ ≤∫ +∞
a|f(x)| dx .
Inoltre se f : [a,+∞[→ R e g : [a,+∞[→ R sono funzioni continue taliche, per ogni x ∈ [a,+∞[, |f(x)| ≤ g(x), si ha
1. Se g e integrabile in senso improprio, allora f e assolutamente inte-grabile in senso improprio.
2. Se l’integrale improprio di f e assolutamente divergente, allora anchel’integrale improprio di g e divergente positivamente.
304 Capitolo 10: Calcolo integrale
Utilizzando la definizione si riconosce facilmente che l’integrale impro-prio ∫ +∞
1
1
xαdx
e convergente per α > 1 ed e divergente positivamente se 0 < α < 1.Si puo infine enunciare il seguente criterio dell’ordine di infinitesimo.
Teorema 10.3.9 (Criterio dell’ordine di infinitesimo)Sia f : [a,+∞[→ R una funzione continua. Allora:
1. Se f e un infinitesimo in +∞ di ordine maggiore o uguale di α, conα > 1, allora f e assolutamente integrabile in senso improprio in[a,+∞[.
2. Se f e un infinitesimo in +∞ di ordine minore o uguale di 1 (oppurese tende ad un limite diverso da 0 in +∞), allora l’integrale impropriodi f e assolutamente divergente.
Dimostrazione. Se f e un infinitesimo in +∞ di ordine maggiore o uguale di α, conα > 1, si possono trovare c ∈ [a,+∞[ ed M ∈ R tali che, per ogni x ∈ [c,+∞[, |f(x)| ≤M/|x|α. Poiche α > 1, la funzione 1/|x|α e integrabile in senso improprio in [a,+∞[ equindi anche f lo e.
2) Se f e un infinitesimo in +∞ di ordine minore o uguale di 1 oppure se f tende ad un
limite diverso da 0 in +∞, esistono c ∈ [a,+∞[ ed M ∈ R tali che, per ogni x ∈ [c,+∞[,
|f(x)| ≥ M/|x|. Allora la tesi segue dal fatto che la funzione M/|x| non e integrabile in
senso improprio in [c,+∞[. #
Il criterio dell’ordine di infinitesimo non si puo applicare se f : [a,+∞[→R e un infinitesimo in +∞ di ordine maggiore di 1, ma minore di 1 + ε perogni ε > 0. In questi casi si cerca di ricorrere ad altri metodi oppuredirettamente alla definizione.
Ad esempio, si consideri l’integrale improprio
∫ +∞
0
sinx
x2 + 1dx .
La funzione e continua in [0,+∞[ e quindi bisogna discutere l’integrabilitasolamente in un intorno del punto +∞. Per ogni x ∈ [0,+∞[, risulta
∣∣∣∣sinx
x2 + 1
∣∣∣∣ ≤1
x2 + 1
e poiche 1/(x2 +1) e un infinitesimo di ordine 2 in +∞, dal criterio dell’or-dine di infinitesimo (Teorema 10.3.9 segue che l’integrale improprio consi-derato e assolutamente convergente e quindi convergente.

10.3 Integrali impropri 305
Si consideri l’integrale improprio
∫ +∞
2
1
x logn xdx , n ≥ 1 .
La funzione in esame e continua e quindi bisogna discutere l’integrabilitasolamente in un intorno del punto +∞. Nel punto +∞ la funzione e uninfinitesimo di ordine maggiore di 1, ma di ordine minore di α per ogni α > 1e pertanto il criterio sull’ordine di infinitesimo non puo essere applicato(l’ordine maggiore di 1 esclude la seconda parte e l’ordine minore di α perogni α > 1 esclude la prima parte del teorema).
Pertanto, si ricorre direttamente alla definizione. Se n = 1 si ha, perogni b > 2,
∫ b
2
1
x log xdx = [log | log x|]b2 = log log b− log log 2 ,
mentre, se n ≥ 2,
∫ b
2
1
x logn xdx =
[log−n+1 x
−n+ 1
]b
2
= − 1
n− 1
(log−n+1 b− log−n+1 2
).
Si deduce che
∫ 1/2
0
1
x logn xdx =
⎧⎨
⎩
1
(n− 1) logn−1 2, n ≥ 2 ,
+∞ , n = 1
e quindi l’integrale improprio e convergente se e solo se n ≥ 2.
Si consideri l’integrale improprio
Γ(α) :=
∫ +∞
0xα−1e−x dx , α ∈ R . (10.3.7)
Bisogna discutere l’integrabilita in un intorno del punto 0 ed in un intornodel punto +∞.
Nel punto 0, vi e un infinito di ordine 1−α se α < 1 altrimenti la funzionee limitata e quindi, per il criterio dell’ordine di infinito e tenendo conto dellapositivita della funzione, l’integrale Γ(α) e convergente per 1− α < 1, cioeper α > 0 ed e divergente positivamente per α ≤ 0 in un intorno del punto0.
Nel punto +∞, la funzione e un infinitesimo di ordine arbitrariamentegrande e quindi e sicuramente integrabile in un intorno del punto +∞ peril criterio dell’ordine di infinitesimo.

306 Capitolo 10: Calcolo integrale
Si conclude che l’integrale assegnato e convergente per α > 0 e divergentepositivamente per α ≤ 0. La funzione Γ :]0,+∞[→ R definita dalla (10.3.7)e nota come funzione gamma.
Il criterio dell’ordine di infinitesimo (Teorema 10.3.9) richiama un risul-tato analogo stabilito per le serie numeriche (Teorema 7.2.13).
In effetti, e possibile stabilire il seguente legame tra integrali impropri eserie numeriche. Sia
∑+∞n=0 an una serie numerica e si consideri la funzione
f : [0,+∞[→ R cosı definita; per ogni x ∈ [0,+∞[, considerato l’uniconumero naturale n ∈ N tale che x ∈ [n, n+ 1[, si pone
f(x) := an .
Allora, le seguenti proposizioni sono equivalenti:
a) La serie∑+∞
n=0 an e convergente (rispettivamente, assolutamente con-vergente, divergente);
b) La funzione f e integrabile in senso improprio in [0,+∞[ (rispettiva-mente, f e assolutamente integrabile in senso improprio in [0,+∞[,l’integrale improprio di f e divergente).
Inoltre, vera l’una e quindi ciascuna delle proposizioni equivalenti pre-cedenti, si ha
+∞∑
n=0
an =
∫ +∞
0f(x) dx .
Dimostrazione. Per ogni n ∈ N, si ha∫ n+1n f(x) dx = an e quindi, denotata con sn la
somma parziale n-esima della serie, si ha
sn =n∑
k=0
ak =n∑
k=0
∫ k+1
kf(x) dx =
∫ n+1
0f(x) dx .
Da cio segue subito b)⇒ a); per il viceversa, basta osservare che, per ogni n ∈ N e
b ∈ [n, n+1[, l’integrale∫ b0 f(x) dx e compreso tra minsn, sn+1 e maxsn, sn+1. Se ℓ
denota la somma della serie, fissato ε > 0, si puo trovare ν ∈ N tale che, per ogni n ≥ ν,
risulti |sn − ℓ| < ε e conseguentemente anche∣∣∣∫ b0 f(x) dx− ℓ
∣∣∣ < ε. Da cio segue la b) ed
anche l’uguaglianza prevista nell’ultima parte della tesi.
I casi rispettivi si dimostrano in maniera analoga. #
Viceversa, considerata una funzione f : [0,+∞[→ R integrabile in sensoimproprio, si puo definire la serie
∑+∞n=0 an di termine generale n-esimo an
ponendo an := f(n), n ∈ N.Se f : [0,+∞[→ R e positiva e decrescente, allora le seguenti proposizioni
sono equivalenti:
10.3 Integrali impropri 307
a) La funzione f e integrabile in senso improprio in [0,+∞[ (rispettiva-mente, l’integrale improprio di f e divergente positivamente).
b) La serie∑+∞
n=0 an e convergente (rispettivamente, divergente positiva-mente).
Inoltre, vera l’una e quindi ciascuna delle proposizioni equivalenti pre-cedenti, si ha
∫ +∞
0f(x) dx ≤
+∞∑
n=0
an ≤ f(0) +
∫ +∞
0f(x) dx .
Dimostrazione. Poiche f e decrescente si ha, per ogni n ∈ N,
an+1 ≤∫ n+1
nf(x) dx ≤ an
e quindi∑n
k=0 ak+1 ≤∫ n+10 f(x) dx ≤
∑nk=0 ak.
n∑
k=0
ak = a0 +n−1∑
k=0
ak+1 ≤ a0 +
∫ +∞
0f(x) dx = f(0) +
∫ +∞
0f(x) dx
e quindi la serie e convergente in quanto e a termini positivi e le sue somme parziali sonolimitate superiormente. Si ha inoltre
+∞∑
n=0
an ≤ f(0) +
∫ +∞
0f(x) dx .
Viceversa, per ogni b ∈ [0,+∞[, considerato n ∈ N tale che b ∈ [n, n + 1[, dallapositivita di f segue
∫ b
0f(x) dx ≤
∫ b
0f(x) dx+
∫ n+1
bf(x) dx =
∫ n+1
0f(x) dx ≤
n∑
k=0
ak ;
poiche f e positiva e il suo integrale improprio e limitato superiormente dalla sommadella serie, si ottiene la a) e inoltre
∫ +∞
0f(x) dx ≤
+∞∑
n=0
an ,
e cio completa la dimostrazione. #

Parte II
Equazioni differenziali efunzioni di piu variabili
reali


Nella seconda parte del corso, viene completato lo studio delle funzionidi una variabile reale con ulteriori capitoli riguardanti lo studio delle succes-sioni e delle serie di funzioni e quello delle equazioni differenziali ordinarie;inoltre, vengono illustrati alcuni aspetti riguardanti le funzioni di piu varia-bili reali, quali il calcolo differenziale, lo studio dei massimi e minimi relativie vincolati e lo studio degli integrali multipli corredato da alcuni strumentielementari di teoria della misura.

Capitolo 11
Successioni e serie difunzioni
11.1 Convergenza puntuale ed uniforme
Sia X un sottoinsieme non vuoto di R e sia (fn)n∈N una successione difunzioni reali definite in X.
Fissato un elemento x0 ∈ X, si dice che la successione (fn)n∈N e conver-gente in x0 se la successione numerica (fn(x0))n∈N e convergente.
Inoltre, se A ⊂ X, si dice che la successione (fn)n∈N e puntualmenteconvergente in A (oppure semplicemente convergente in A oppure ancheconvergente in A) se essa e convergente in ogni elemento di A. Se A =X si dice che (fn)n∈N e puntualmente convergente oppure semplicementeconvergente.
Si supponga che la successione di funzioni (fn)n∈N sia puntualmenteconvergente; allora si puo considerare la funzione reale f : X → R definitaponendo, per ogni x ∈ X,
f(x) := limn→+∞
fn(x) . (11.1.1)
Essa viene denominata limite puntuale (oppure limite semplice) della suc-cessione (fn)n∈N e viene denotata con
f = limn→+∞
fn puntualmente.
Esplicitamente, la condizione precedente pertanto significa
∀ x ∈ X ∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : |fn(x)− f(x)| ≤ ε . (11.1.2)
314 Capitolo 11: Successioni e serie di funzioni
Tale tipo di convergenza tuttavia consente l’applicazione dei risultati otte-nuti sulle successioni numeriche in ogni punto prefissato ma non ci si puoaspettare che vengano conservate per la funzione f alcune proprieta qua-litative delle funzioni fn, quali la continuita, la derivabilita in un punto oglobale e l’integrabilita.
Per lo studio di tali proprieta della funzione limite e piu efficace il concet-to di convergenza uniforme in cui si pretende che nella condizione (11.1.2)il numero naturale ν non dipenda dall’elemento x ∈ X ma solamente daε > 0.
Precisamente, se (fn)n∈N e una successione di funzioni reali definite in Xed f : X → R e una ulteriore funzione, si dice che (fn)n∈N e uniformementeconvergente verso f (oppure che f e il limite uniforme della successione(fn)n∈N ) se e verificata la seguente condizione:
∀ ε > 0 ∃ ν ∈ N t.c. ∀ x ∈ X ∀ n ≥ ν : |fn(x)− f(x)| ≤ ε , (11.1.3)
oppure, equivalentemente,
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : supx∈X
|fn(x)− f(x)| ≤ ε .
In tal caso, si scrive
f = limn→+∞
fn uniformemente.
Inoltre, si dice che la successione (fn)n∈N e uniformemente convergentein un sottoinsieme A di X se la successione ((fn)|A)n∈N delle restrizioniall’insieme A e uniformemente convergente.
Evidentemente, la condizione (11.1.3) implica la (11.1.2) e pertanto, sela successione (fn)n∈N e uniformemente convergente verso f , essa e anchepuntualmente convergente verso f .
Viceversa, se (fn)n∈N converge puntualmente verso f , non e detto chela convergenza sia uniforme.
Ad esempio, si consideri, per ogni n ≥ 1, la funzione reale fn : R→ R de-finita ponendo, per ogni x ∈ R, fn(x) := sin(x)+x/n. Si riconosce facilmen-te che sin = limn→+∞ fn. Infatti, per ogni x0 ∈ R, si ha limn→+∞ x0/n = 0e conseguentemente limn→+∞ fn(x0) = sinx0. Tuttavia, fissato ε > 0 eimponendo la condizione | sinx−fn(x)| < ε, si trova |x|/n < ε, che e soddi-sfatta solamente nell’intervallo ]− nε, nε[ e non in tutto R; si conclude chela convergenza non puo essere uniforme.
Si puo completare la discussione della convergenza della successione difunzioni (fn)n≥1 osservando che la convergenza risulta uniforme in ogniintervallo I limitato di R. Infatti, posto r := supx∈I |x| si ha I ⊂ [−r, r] e
11.2 Proprieta del limite di una successione di funzioni 315
conseguentemente, per ogni n ≥ 1, supx∈I |fn(x) − f(x)| = supx∈I |x|/n ≤r/n; pertanto, fissato ε > 0 e considerato ν ≥ 1 tale che ν ≥ rε, si hasupx∈I |fn(x) − f(x)| ≤ ε for ogni n ≥ ν, da cui l’uniforme convergenza inI.
Come ulteriore esempio si consideri, per ogni n ∈ N, la funzione realefn : [0, 1] → R definita ponendo, per ogni x ∈ [0, 1], fn(x) := xn e siaf : [0, 1]→ R cosı definita
f(x) :=
0 , 0 ≤ x < 1 ,1 , x = 1 .
Allora, la successione di funzioni (fn)n∈N converge puntualmente verso f .Tuttavia la convergenza non puo essere uniforme. Si supponga infatti perassurdo che fissato ε = 1/3, esista ν ∈ N tale che, per ogni n ≥ ν e per ognix ∈ [0, 1], si abbia |fn(x)− f(x)| ≤ 1/3; allora, in particolare, considerandon = ν ed x := ν
√2/3, si dovrebbe avere 2/3 = |fν(x) − f(x)| ≤ 1/3 da cui
un assurdo. Quindi (fn)n∈N non converge uniformemente verso f ; in questocaso, si puo riconoscere che, per ogni 0 < a < 1, la successione (fn)n∈Nconverge uniformemente verso f in [0, a].
Si osserva che se (fn)n∈N e (gn)n∈N sono successioni di funzioni di Xin R convergenti puntualmente verso una funzione f : X → R e rispettiva-mente g : X → R, allora la successione di funzioni (fn + gn)n∈N convergepuntualmente verso f + g e la successione di funzioni (fn · gn)n∈N convergepuntualmente verso f · g. Se (fn)n∈N e (gn)n∈N convergono uniformementeverso f e rispettivamente g, allora la somma (fn+gn)n∈N converge uniforme-mente verso f +g, mentre senza ulteriori ipotesi (ad esempio, di limitatezzadi f e g) non si puo affermare che il prodotto (fn · gn)n∈N converga unifor-memente verso f · g, come si riconosce facilmente considerando ad esempiofn(x) = gn(x) = x+ 1/n per ogni x ∈ R.
11.2 Proprieta del limite di una successionedi funzioni
Si studia ora il comportamento della funzione limite f di una successione(fn)n∈N di funzioni uniformemente convergente, nelle ipotesi in cui ogni fnverifichi opportune condizioni.
Il primo risultato e un teorema di carattere generale che stabilisce unaformula di inversione dei limiti per le successioni di funzioni uniformementeconvergenti.

316 Capitolo 11: Successioni e serie di funzioni
Teorema 11.2.1 (Teorema di inversione dei limiti)Siano X un sottoinsieme non vuoto di R, x0 un punto di accumulazione perX ed (fn)n∈N una successione di funzioni reali definite in X. Si suppongache
i) La successione (fn)n∈N converge uniformemente verso una funzionef : X → R;
ii) Per ogni n ∈ N, risulta limx→x0
fn(x) = ℓn ∈ R.
Allora, la successione (ℓn)n∈N e convergente e inoltre, posto ℓ := limn→+∞
ℓn,
risulta limx→x0
f(x) = ℓ.
Dimostrazione. Si dimostra innanzitutto che la successione (ℓn)n∈N e convergente,facendo vedere che essa verifica la seguente condizione di Cauchy:
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n,m ≥ ν : |ℓn − ℓm| ≤ ε .
Si fissi a tal fine ε > 0 e, per la uniforme convergenza di (fn)n∈N verso f , si consideriν ∈ N tale che, per ogni n ≥ ν e per ogni x ∈ X, si abbia |fn(x)−f(x)| ≤ ε/4. Si dimostraora che, per ogni n,m ≥ ν, risulta |ℓn − ℓm| ≤ ε e cio completera la dimostrazione. Sifissino pertanto n,m ≥ ν; dall’ipotesi i), si possono trovare un intorno J1 di x0 tale che,per ogni x ∈ X ∩ J1 " x0, |fn(x)− ℓn| ≤ ε/4 ed un intorno J2 di x0 tale che, per ognix ∈ X ∩ J2 " x0, |fm(x)− ℓm| ≤ ε/4. Allora, fissato x ∈ X ∩ J1 ∩ J2 " x0, risulta
|ℓn − ℓm| = |ℓn − fn(x)− (ℓm − fm(x)) + fn(x)− f(x)− (fm(x)− f(x))|≤ |ℓn − fn(x)|+ |ℓm − fm(x)|+ |fn(x)− f(x)|+ |fm(x)− f(x)|
≤ε
4+ε
4+ε
4+ε
4= ε.
Si e cosı dimostrato che la successione (ℓn)n∈N e convergente. Si ponga ℓ := limn→+∞
ℓn.
Sia ora ε > 0; poiche (fn)n∈N e uniformemente convergente verso f , esiste ν1 ∈ N tale
che, per ogni n ≥ ν1 e per ogni x ∈ X, si abbia |fn(x) − f(x)| ≤ ε/3. Inoltre, la
successione (ℓn)n∈N converge verso ℓ e quindi esiste ν2 ∈ N tale che |ℓn − ℓ| ≤ ε/3 per
ogni n ≥ ν2. Si fissi ora n ≥ maxν1, ν2; poiche fn converge verso ℓn per x → x0, si puo
trovare un intorno J di x0 tale che, per ogni x ∈ X ∩ J " x0, risulti |fn(x)− ℓn| ≤ ε/3.
Conseguentemente, per ogni x ∈ X ∩J "x0, risulta anche |f(x)− ℓ| ≤ |f(x)− fn(x)|+|fn(x) − ℓn| + |ℓn − ℓ| ≤ ε/3 + ε/3 + ε/3 = ε; dall’arbitrarieta di ε > 0, segue quindi la
tesi. #
La tesi del Teorema 11.2.1 precedente esprime la possibilita di invertirei limiti rispetto alle variabili n→ +∞ ed x→ x0; infatti, si ha
limx→x0
limn→+∞
fn(x) = limx→x0
f(x) = ℓ = limn→+∞
ℓn = limn→+∞
limx→x0
fn(x) .
Tale inversione dei limiti non vale, in generale, se la successione di fun-zioni non e uniformemente convergente; ad esempio, risulta evidentementelimn→+∞ limx→1− xn = 1 mentre limx→1− limn→+∞ xn = 0.
Come ulteriore conseguenza del risultato precedente, si puo ottenere laproprieta di continuita del limite uniforme.
11.2 Proprieta del limite di una successione di funzioni 317
Teorema 11.2.2 Siano X un sottoinsieme di R, x0 ∈ X un punto di accu-mulazione per X ed (fn)n∈N una successione di funzioni reali definite in Xe continue nel punto x0. Se la successione (fn)n∈N converge uniformementeverso una funzione f : X → R, allora anche f risulta continua nel puntox0.
Dimostrazione. Basta applicare il Teorema 11.2.1 precedente tenendo presente che, per
ogni n ∈ N, si ha limx→x0 fn(x) = fn(x0). #
Ovviamente, se ogni funzione fn e e continua in un sottoinsieme A diX, allora anche il limite uniforme f risulta continuo in A; in particolare, seogni fn e continua, il limite uniforme f e anch’esso continuo.
Quest’ultimo risultato puo in alcuni casi essere utile per dimostrare cheuna successione di funzioni non puo essere uniformemente convergente versouna funzione f . Ad esempio, si consideri, per ogni n ∈ N, la funzionefn : R → R definita ponendo, per ogni x ∈ R, fn(x) : | sin(πx)|n. Allora,la successione di funzioni (fn)n∈N converge puntualmente verso la funzionef : R → R che assume il valore 1 in Z e 0 in R " Z; allora, la convergenzanon puo essere uniforme in quanto, per ogni n ∈ N, fn e continua mentre fevidentemente non lo e.
Si considera ora il comportamento del limite di una successione di funzio-ni rispetto alle proprieta di integrabilita e derivabilita. Si hanno i seguentirisultati di carattere generale.
Teorema 11.2.3 (Passaggio al limite sotto il segno di integrale)Siano a, b ∈ R con a < b ed (fn)n∈N una successione di funzioni realicontinue in [a, b] uniformemente convergente verso una funzione f : [a, b]→R. Allora f e integrabile in [a, b] ed inoltre
∫ b
af(x) dx = lim
n→+∞
∫ b
afn(x) dx .
Dimostrazione. Poiche, per ogni n ∈ N, fn e una funzione continua, dal Teorema 11.2.2precedente segue che anche f e continua e quindi integrabile in [a, b]. Inoltre, fissatoε > 0, dalla uniforme convergenza di (fn)n∈N verso f , segue l’esistenza di ν ∈ N tale che,per ogni n ≥ ν e per ogni x ∈ [a, b], si abbia |fn(x) − f(x)| ≤ ε/(b − a); pertanto, perogni n ≥ ν, si ha
∣∣∣∣∫ b
afn(x) dx−
∫ b
af(x) dx
∣∣∣∣ ≤∫ b
a|fn(x)− f(x)| dx ≤
ε
b− a
∫ b
adx = ε ,
e cio, per l’arbitrarieta di ε > 0, dimostra la tesi. #
La denominazione attribuita al teorema precedente deriva dal fatto cheesso puo essere espresso dicendo che il limite uniforme (se esistente) di

318 Capitolo 11: Successioni e serie di funzioni
una successione (fn)n∈N di funzioni continue in un intervallo [a, b], risultaintegrabile in [a, b] e si ha
limn→+∞
∫ b
afn(x) dx =
∫ b
a
(lim
n→+∞fn(x)
)dx .
Teorema 11.2.4 (Passaggio al limite sotto il segno di derivata)Siano a, b ∈ R con a < b ed (fn)n∈N una successione di funzioni realiderivabili e con derivata continua in [a, b]. Si supponga che
i) La successione delle derivate (f ′n)n∈N e uniformemente convergente
verso una funzione g : [a, b]→ R.
ii) Esiste x0 ∈ [a, b] tale che la successione (fn(x0))n∈N sia convergente.
Allora, la successione (fn)n∈N e uniformemente convergente e, denotatocon f := limn→+∞ fn il suo limite uniforme, si ha che f e derivabile in[a, b] e f ′ = g.
Dimostrazione. Si ponga innanzitutto ℓ0 := limn→+∞ fn(x0). Si osserva che, dal Teo-rema 11.2.2, la funzione g deve essere continua e quindi la funzione integrale f : [a, b] → Rdefinita ponendo, per ogni x ∈ R,
f(x) := ℓ0 +
∫ x
x0
g(t) dt
risulta derivabile e la sua derivata coincide con g.Resta da dimostrare pertanto che la successione (fn)n∈N converge uniformemente
verso f .Sia ε > 0; poiche (f ′
n)n∈N converge uniformemente verso g, si puo trovare ν1 ∈ N taleche, per ogni n ≥ ν1 e per ogni x ∈ [a, b], risulti |f ′
n(x) − g(x)| ≤ ε/(2(b − a)); inoltre,poiche la successione (fn(x0))n∈N converge verso ℓ0, esiste ν2 ∈ N tale che |fn(x0)−ℓ0| ≤ε/2 per ogni n ≥ ν2.
Allora, considerato ν = maxν1, ν2, per ogni n ≥ ν e per ogni x ∈ [a, b], risulta
|fn(x)− f(x)| =
∣∣∣∣fn(x)− ℓ0 −∫ x
x0
g(t) dt
∣∣∣∣
=
∣∣∣∣∫ x
x0
f ′n(t) dt+ fn(x0)− ℓ0 −
∫ x
x0
g(t) dt
∣∣∣∣
≤∣∣∣∣∫ x
x0
|f ′n(t)− g(t)| dt
∣∣∣∣+ |fn(x0)− ℓ0|
≤ε
2(b− a)|x− x0|+
ε
2
≤ε
2+ε
2= ε ,
e cio per l’arbitrarieta di ε > 0, dimostra la tesi. #
Anche in questo caso la denominazione del teorema e giustificata dalfatto che nelle ipotesi previste si ottiene
D
(lim
n→+∞fn
)= lim
n→+∞D(fn) .
11.3 Serie di funzioni 319
11.3 Serie di funzioni
Si consideri un sottoinsieme non vuoto X di R e sia (fn)n∈N una successionedi funzioni reali definite in X; per ogni n ∈ N, si consideri la funzione
sn :=n∑
k=0
fk .
Essa viene denominata somma parziale n-esima della successione di funzioni(fn)n∈N e la successione (sn)n∈N viene denominata serieindexserie—di fun-zioni di termine generale fn (oppure successione delle somme parziali dellasuccessione di funzioni (fn)n∈N) e viene denotata con il simbolo
+∞∑
n=0
fn .
Si assume la seguente definizione.
Sia (fn)n∈N una successione di funzioni reali definite in un sottoinsiemeX di R. Si dice che la serie
+∞∑
n=0
fn (11.3.1)
e convergente in un punto x0 ∈ X se la successione (sn(x0))n∈N delle sommeparziali calcolate in x0 e una serie numerica convergente. Analogamente, sidice che la serie (11.3.1) e convergente puntualmente (oppure convergentesemplicemente oppure convergente) in un sottoinsieme non vuoto A di X sela successione (sn)n∈N delle somme parziali e convergente in A. Infine, si diceche la serie (11.3.1) e convergente (puntualmente oppure semplicemente) (inX) se la successione (sn)n∈N delle somme parziali e convergente.
Se la serie (11.3.1) e convergente, si puo considerare la funzione f : X →R definita ponendo, per ogni x ∈ X,
f(x) := limn→+∞
sn(x) (= limn→+∞
n∑
k=0
fk(x)) ;
tale funzione viene denominata somma della serie di termine generale fn e,per indicare cio, si scrive f =
∑+∞n=0 fn.
Come si puo notare, si e utilizzato lo stesso simbolo per indicare sia laserie di termine generale fn, che la sua somma nel caso in cui essa risulticonvergente; sara comunque chiaro dal contesto in cui si opera se il simbolo∑+∞
n=0 fn si deve intendere come la successione delle somme parziali (sn)n∈Noppure come il limite di tale successione di funzioni.
320 Capitolo 11: Successioni e serie di funzioni
Siano (fn)n∈N e una successione di funzioni reali definite in un insiemeX e sia f : X → R una ulteriore funzione. Allora, la serie
∑+∞n=0 fn converge
puntualmente verso f se e solo se e soddisfatta la seguente condizione
∀ x ∈ X ∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν :
∣∣∣∣∣f(x)−n∑
k=0
fk(x)
∣∣∣∣∣ ≤ ε .
Anche per le serie di funzioni si ha una nozione di convergenza uniforme,di seguito precisata.
Sia (fn)n∈N una successione di funzioni reali definite in un insieme Xe sia f : X → R una ulteriore funzione. Si dice che la serie di funzioni∑+∞
n=0 fn converge uniformemente verso f e, in tal caso, si scrive
f =+∞∑
n=0
fn uniformemente,
se la successione (sn)n∈N delle somme parziali e uniformemente convergenteverso f .
Pertanto,∑+∞
n=0 fn converge uniformemente verso f se e solo se e soddi-sfatta la condizione seguente
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν ∀ x ∈ X :
∣∣∣∣∣f(x)−n∑
k=0
fk(x)
∣∣∣∣∣ ≤ ε ,
che puo essere scritta anche al seguente modo
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : supx∈X
∣∣∣∣∣f(x)−n∑
k=0
fk(x)
∣∣∣∣∣ ≤ ε ,
la quale a sua volta e equivalente a
limn→+∞
supx∈X
∣∣∣∣∣f(x)−n∑
k=0
fk(x)
∣∣∣∣∣ = 0 ;
Da quanto visto sulla convergenza di successioni di funzioni, consegueevidentemente che una serie di funzioni uniformemente convergente risultaanche convergente. Le nozioni di convergenza e di convergenza uniforme nonsono tuttavia equivalenti, come si riconosce con qualche semplice esempio.
Si consideri, per ogni n ∈ N, la funzione reale fn : [0, 1] → R definitaponendo, per ogni x ∈ [0, 1[, fn(x) := xn e sia f : [0, 1[→ R definitaponendo, per ogni x ∈ [0, 1[, f(x) := 1/(1− x).

11.3 Serie di funzioni 321
Fissato x ∈ [0, 1[, risulta limn→+∞ |f(x) −∑n
k=0 fk(x)| = 0 e pertantola serie di termine generale fn converge verso f puntualmente nell’intervallo[0, 1[.
Poiche, per ogni n ∈ N,
supx∈[0,1[
∣∣∣∣∣f(x)−n∑
k=0
fk(x)
∣∣∣∣∣ = supx∈[0,1[
∣∣∣∣1
1− x− 1− xn+1
1− x
∣∣∣∣ = supx∈[0,1[
xn+1
1− x= +∞ ,
la serie di termine generale fn non puo convergere uniformemente verso f in[0, 1[. Tuttavia, fissato un elemento a ∈ [0, 1[, si riconosce che la convergenzadella serie e uniforme nell’intervallo [0, a].
Infatti, in questo caso risulta
supx∈[0,a]
∣∣∣∣∣f(x)−n∑
k=0
fk(x)
∣∣∣∣∣ = supx∈[0,a]
xn+1
1− x=
an+1
1− a,
in quanto la funzione xn+1/(1−x) e strettamente crescente in [0, a] e quindiassume il massimo in a. Poiche limn→+∞ an+1/(1− a) = 0, e soddisfatta lacondizione di convergenza uniforme in [0, a].
Dal teorema di inversione dei limiti e dai teoremi di passaggio al limi-te per le successioni di funzioni uniformemente convergenti, si ottengono iseguenti risultati, la cui dimostrazione si ottiene in ogni caso da quella giavista per le successioni di funzioni considerando la successione delle sommeparziali della serie assegnata.
Teorema 11.3.1 (Teorema di inversione dei limiti per le serie)Siano X un sottoinsieme non vuoto di R, x0 un punto di accumulazione perX ed (fn)n∈N una successione di funzioni reali definite in X. Si suppongache
i) La serie∑+∞
n=0 fn converge uniformemente verso una funzione f :X → R;
ii) Per ogni n ∈ N, risulta limx→x0
f(x) = ℓn ∈ R;
Allora la serie numerica+∞∑
n=0
ℓn e convergente e posto ℓ :=+∞∑
n=0
ℓn, risulta
limx→x0
f(x) = ℓ.
Nelle ipotesi del risultato precedente, si ha
limx→x0
+∞∑
n=0
fn(x) = limx→x0
f(x) = ℓ =+∞∑
n=0
ℓn =+∞∑
n=0
limx→x0
fn(x) .

322 Capitolo 11: Successioni e serie di funzioni
Teorema 11.3.2 Siano X un sottoinsieme di R, x0 ∈ X un punto di ac-cumulazione per X ed (fn)n∈N una successione di funzioni reali definite inX e continue nel punto x0. Se la serie
∑+∞n=0 fn converge uniformemente
verso una funzione f : X → R, allora anche f risulta continua nel puntox0.
Teorema 11.3.3 (Teorema di integrazione termine a termine)Siano a, b ∈ R con a < b ed (fn)n∈N una successione di funzioni realicontinue in [a, b] tali che la serie
∑+∞n=0 fn sia uniformemente convergente
verso una funzione f : [a, b]→ R. Allora f e integrabile in [a, b] ed inoltre
∫ b
af(x) dx =
+∞∑
n=0
∫ b
afn(x) dx .
Nelle ipotesi del teorema precedente, si ha
+∞∑
n=0
∫ b
afn(x) dx =
∫ b
a
+∞∑
n=0
fn(x) dx .
Teorema 11.3.4 (Teorema di derivazione termine a termine)Siano a, b ∈ R con a < b ed (fn)n∈N una successione di funzioni realiderivabili e con derivata continua in [a, b]. Si supponga che
i) La serie∑+∞
n=0 f′n e uniformemente convergente verso una funzione
g : [a, b]→ R.
ii) Esiste x0 ∈ [a, b] tale che la serie numerica∑+∞
n=0 fn(x0) sia conver-gente.
Allora, la serie∑+∞
n=0 fn e uniformemente convergente e, denotato con
f :=∑+∞
n=0 fn il suo limite uniforme, si ha che f e derivabile in [a, b] ef ′ = g.
Anche ora nelle ipotesi del teorema precedente si ha
D
(+∞∑
n=0
fn
)=
+∞∑
n=0
D(fn) .
Si conclude la presente sezione introducendo alcune nozioni frequente-mente utilizzate nello studio della convergenza delle serie di funzioni.
Sia (fn)n∈N una successione di funzioni reali definite in un insieme X. Sidice che la serie di funzioni
∑+∞n=0 fn di termine generale fn e assolutamente

11.3 Serie di funzioni 323
convergente (puntualmente oppure rispettivamente uniformemente) se laserie
∑+∞n=0 |fn| di termine generale |fn| e convergente (puntualmente oppure
rispettivamente uniformemente) (in X).
Ovviamente ogni serie di funzioni assolutamente convergente (puntual-mente oppure rispettivamente uniformemente) risulta convergente (pun-tualmente oppure rispettivamente uniformemente), mentre il viceversa nonvale.
Sia (fn)n∈N una successione di funzioni reali limitate definite in un in-sieme X e si ponga che, per ogni n ∈ N, ∥fn∥ := supx∈X |fn(x)|. Si dice chela serie di funzioni
∑+∞n=0 fn di termine generale fn e totalmente convergente
se la serie numerica∑+∞
n=0 ∥fn∥ e convergente.
(Criterio di Weierstrass per la totale convergenza) Si riconosce facil-mente che una serie di funzioni
∑+∞n=0 fn e totalmente convergente se e solo
se esiste una successione (an)n∈N di numeri reali (positivi) tale che la serienumerica
∑+∞n=0 an sia convergente ed inoltre, per ogni n ∈ N e per ogni
x ∈ X, risulti |fn(x)| ≤ an.
Ogni serie di funzioni totalmente convergente risulta anche uniforme-mente convergente.
Si ricorda innanzitutto che una serie∑+∞
n=0 an e convergente se e solo se la successione(sn)n∈N delle sue somme parziali e convergente e quindi se e solo se (sn)n∈N verifica lacondizione di Cauchy, che puo essere scritta al modo seguente
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν , ∀ p ∈ N : |sn+p − sn| ≤ ε ,
e da cio, tenendo presente che∑n+p
k=n+1 ak =∑n+p
k=0 ak−∑n
k=0 ak = sn+p−sn, si ottienela condizione
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν , ∀ p ∈ N :
∣∣∣∣∣∣
n+p∑
k=n+1
ak
∣∣∣∣∣∣≤ ε .
Conseguentemente, una serie di funzioni∑+∞
n=0 fn, con fn : X → R converge pun-
tualmente (in X) se e solo se per ogni x ∈ X la serie numerica∑+∞
n=0 fn(x) verifica lacondizione di Cauchy precedente, e cioe se e solo se
∀ x ∈ X ∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν , ∀ p ∈ N :
∣∣∣∣∣∣
n+p∑
k=n+1
fk(x)
∣∣∣∣∣∣≤ ε .
L’indice ν previsto sopra dipende da x ∈ X oltre che da ε > 0. La convergenza unifor-me della serie
∑+∞n=0 fn sara conseguentemente caratterizzata dalla seguente condizione
di Cauchy
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν , ∀ p ∈ N ∀ x ∈ X :
∣∣∣∣∣∣
n+p∑
k=n+1
fk(x)
∣∣∣∣∣∣≤ ε .
A questo punto, la condizione di Cauchy per la serie∑+∞
n=0 ∥fn∥ si esprime al modoseguente
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν , ∀ p ∈ N :n+p∑
k=n+1
∥fk∥ ≤ ε ,

324 Capitolo 11: Successioni e serie di funzioni
e da cio si ottiene la condizione
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν , ∀ p ∈ N , ∀ x ∈ X :
∣∣∣∣∣∣
n+p∑
k=n+1
fk(x)
∣∣∣∣∣∣≤
n+p∑
k=n+1
|fk(x)| ≤ ε ,
che e la condizione di Cauchy per l’uniforme convergenza.
11.4 Serie di potenze
Si considerano ora brevemente alcune serie di tipo particolare, ma di usomolto frequente.
Siano x0 ∈ R ed (an)n∈N una successione di numeri reali. Si denominaserie di potenze di centro x0 e di termine generale an, n ∈ N, la seguenteserie di funzioni
+∞∑
n=0
an (x− x0)n
(quindi, si considera la serie di funzioni∑+∞
n=0 fn, dove, per ogni n ∈ N,fn : R → R e definita ponendo fn(x) = an(x − x0)n per ogni x ∈ R); sen = 0 si assume per convenzione (x− x0)n = 1 anche quando x = x0.
Lo studio della convergenza di una serie di potenze e sostanzialmentebasato sul seguente risultato di importanza fondamentale.
Teorema 11.4.1 Siano x0 ∈ R e (an)n∈N una successione di numeri reali esi consideri la serie di potenze
∑+∞n=0 an(x−x0)n. Se la serie converge in un
punto x1 ∈ R e se x2 ∈ R verifica la seguente condizione |x2−x0| < |x1−x0|(cioe la distanza di x2 da x0 e minore di quella di x1 da x0), allora la serie eassolutamente convergente anche nel punto x2. Pertanto, la serie convergeassolutamente nell’intervallo ]x0 − r1, x0 + r1[, con r1 := |x1 − x0|.
Inoltre, la convergenza e totale (e quindi uniforme) in ogni intervallo[x0 − r, x0 + r], con 0 < r < |x1 − x0|.
Dimostrazione. Poiche la serie numerica∑+∞
n=0 an(x1 − x0)n e convergente, la succes-sione (an(x1 −x0)n)n∈N deve essere infinitesima, e conseguentemente limitata.1 Quindi,deve esistere M ∈ R tale che, per ogni n ∈ N, si abbia |an(x1 − x0)n| ≤ M . Inoltre, perogni n ∈ N, risulta
|an(x2 − x0)n| = |an(x1 − x0)
n||x2 − x0|n
|x1 − x0|n≤ M
∣∣∣∣x2 − x0
x1 − x0
∣∣∣∣n
.
A questo punto, si osserva che la serie∑+∞
n=0 |x2−x0|n/|x1−x0|n e convergente in quantoe una serie geometrica di ragione positiva e strettamente minore di 1, e quindi si puo
1In realta, si potrebbe considerare l’ipotesi leggermente piu lieve che la successione(an(x1 − x0)n)n∈N sia limitata anziche supporre che la serie
∑+∞n=0 an(x1 − x0)n sia
convergente ed osservare, come appena dimostrato, che la convergenza della serie implicala limitatezza della successione (an(x1 − x0)n)n∈N.

11.4 Serie di potenze 325
concludere che, per il criterio di confronto delle serie numeriche a termini positivi, anchela serie
∑+∞n=0 |an(x2−x0)n| e convergente e quindi
∑+∞n=0 an(x2−x0)n e assolutamente
convergente.
Per quanto riguarda l’ultima parte della tesi, sia 0 < r < |x1−x0|; allora, per quantodimostrato la serie
∑+∞n=0 |an| rn e convergente e, per ogni x ∈ [x0 − r, x0 + r], si ha
|an(x− x0)n| ≤ |an| rn; pertanto, la serie e totalmente convergente in [x0 − r, x0 + r]. #
Dalla proprieta precedente segue che l’insieme dei numeri reali per i qualiuna serie di potenze risulta convergente costituisce un intervallo di R concentro x0; tale intervallo potrebbe in generale anche ridursi al solo punto x0
oppure coincidere con tutto R e, negli altri casi, potrebbe contenere o menouno o entrambi gli estremi.
Per studiare in modo piu approfondito l’intervallo di convergenza diuna serie di potenze
∑+∞n=0 an(x − x0)n, conviene introdurre il raggio di
convergenza R di una serie di potenze, definito nel modo seguente
R := sup
ρ ∈ [0,+∞[ |
+∞∑
n=0
an ρn e convergente
. (11.4.1)
Si consideri una serie di potenze∑+∞
n=0 an(x− x0)n e si denoti con R ilsuo raggio di convergenza.
Si ha ovviamente R ≥ 0 e puo risultare eventualmente R = +∞. Inoltre,dalla definizione di R e dal Teorema 11.4.1, si ottengono subito le seguentiproprieta di R:
1. Se R = 0, la serie converge nel punto x0 e non converge in alcun altronumero reale.
2. Se R = +∞, la serie converge puntualmente in ogni punto di R edinoltre la convergenza e uniforme in ogni intervallo limitato di R.
3. Se 0 < R < +∞, la serie converge in ogni punto dell’intervallo aperto]x0 −R, x0 +R[, e non converge nei punti esterni all’intervallo chiuso[x0 − R, x0 + R]; nei punti x0 − R e x0 + R, non si puo dire nulla ingenerale e quindi le serie
+∞∑
n=0
an(x0 −R− x0)n =
+∞∑
n=0
(−1)n an Rn ,
+∞∑
n=0
an(x0 +R− x0)n =
+∞∑
n=0
an Rn
devono essere esaminate caso per caso. Inoltre, la convergenza dellaserie e uniforme in ogni intervallo chiuso [x0 − r, x0 + r], con r < R.

326 Capitolo 11: Successioni e serie di funzioni
Il Teorema di Abel, di cui per brevita non si riporta la dimostrazione,asserisce che, se 0 < R < +∞ e se la serie di potenze converge anchenell’estremo x0 − R (rispettivamente, x0 + R), allora la convergenzae uniforme in ogni intervallo [x0 − R, x0 + r] (rispettivamente, [x0 −r, x0+R]), con 0 < r < R. Se la serie di potenze converge in entrambigli estremi, la convergenza risulta uniforme in tutto l’intervallo [x0 −R, x0 +R].
Viste le proprieta precedenti, lo studio di una serie di potenze risul-ta quasi completamente determinato dalla conoscenza del suo raggio diconvergenza.
Per determinare il raggio di convergenza di una serie di potenze, si pos-sono usare i seguenti due criteri, che traggono spunto dagli analoghi criteriper le serie numeriche.
1. (Criterio del rapporto) Assegnata la serie di potenze∑+∞
n=0 an(x−x0)n, si supponga che esista il seguente limite
limn→+∞
|an+1||an|
= ℓ ;
Allora, si ha
R =
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
+∞ , ℓ = 0 ;
0 , ℓ = +∞ ;
1
ℓ, ℓ ∈]0,+∞[ .
(11.4.2)
2. (Criterio della radice), Assegnata la serie di potenze∑+∞
n=0 an(x−x0)n si supponga che esista il seguente limite
limn→+∞
n√|an| = ℓ ;
Allora, anche in questo caso, R viene dato dalla (11.4.2).
Dimostrazione. Infatti, per quanto riguarda la prima proprieta, risulta
limn→+∞
|an+1(x− x0)n+1||an(x− x0)n|
= limn→+∞
|an+1||an|
|x− x0| = ℓ |x− x0| ,
e quindi, dal criterio del rapporto per le serie numeriche, segue che la serie e (assolutamen-te) convergente per ℓ |x− x0| < 1 (cioe |x− x0| < 1/ℓ se ℓ ∈]0,+∞[) ed e assolutamentedivergente positivamente per ℓ |x − x0| > 1. Dalle proprieta del raggio di convergenzasegue allora la tesi in ognuno dei casi previsti.
La dimostrazione della seconda parte e simile tenendo presente che
limn→+∞
n√
|an(x− x0)n| = limn→+∞
n√
|an| |x− x0| = ℓ |x− x0| ,

11.4 Serie di potenze 327
e applicando il criterio della radice per le serie numeriche anziche quello del rapporto. #
Nel caso in cui nessuno dei due limiti previsti nel criterio del rapportoe della radice esista, si puo riconoscere che R viene comunque dato dalla(11.4.2) con
ℓ := lim supn→+∞
n√|an| .
Seguono ora alcuni esempi.
1. Si consideri la serie geometrica di potenze
+∞∑
n=0
xn .
In questo caso an = 1 per ogni n ∈ N; si puo allora applicare facilmentesia il criterio della radice che del rapporto e si deduce che R = 1; quindila serie converge per |x| < 1 e non converge per |x| > 1; nei punti 1 e−1 si ottengono le serie
+∞∑
n=0
1 ,+∞∑
n=0
(−1)n
che non sono convergenti (la prima e divergente positivamente in quan-to a termini positivi). Pertanto si conclude che la serie converge pun-tualmente nell’intervallo ] − 1, 1[ e uniformemente in ogni intervallo[−a, a] con 0 < a < 1. In questo caso e possibile calcolare anche lasomma della serie che, per le proprieta della serie geometrica e datada
+∞∑
n=0
xn =1
1− x, −1 < x < 1 .
2. Si consideri la serie di potenze
+∞∑
n=1
3n
n3(x− 1)n .
In questo caso an = 3n/n3 per ogni n ≥ 1 e x0 = 1; applicando ilcriterio del rapporto, si ottiene
limn→+∞
3n+1
(n+ 1)3n3
3n= 3

328 Capitolo 11: Successioni e serie di funzioni
e pertanto R = 1/3; quindi la serie converge per |x − 1| < 1/3 (cioenell’intervallo ]1−1/3, 1+1/3[=]2/3, 4/3[) e non converge per |x−1| >1/3. Nel punto 2/3 si ottiene la serie
+∞∑
n=1
3n
n3
(2
3− 1
)n
=+∞∑
n=1
(−1)n 1
n3
che converge in quanto e una serie armonica generalizzata a segnialterni. Inoltre, nel punto 4/3 si ottiene la serie
+∞∑
n=1
3n
n3
(4
3− 1
)n
=+∞∑
n=1
1
n3
che e anch’essa convergente in quanto e una serie armonica generaliz-zata con esponente maggiore di 1. In conclusione la serie converge in[2/3, 4/3].
3. Si consideri la serie+∞∑
n=1
nn (x+ 2)n .
Dal criterio della radice, si ha
limn→+∞
n√nn = lim
n→+∞n = +∞
e quindi R = 0. Pertanto, la serie converge solo nel punto iniziale −2.
4. Si consideri la serie+∞∑
n=1
(x− 1)2n .
In questo caso i coefficienti an della serie di potenze sono dati da
an :=
0 , n dispari ;1 , n pari ;
pertanto il criterio del rapporto e quella radice non possono essere ap-plicati; poiche i coefficienti valgono alternativamente 0 e 1 si riconoscetuttavia facilmente che lim supn→+∞
n√an = 1 e quindi il raggio di
convergenza della serie assegnata e 1.

11.5 Serie ottenute per derivazione ed integrazione 329
11.5 Serie ottenute per derivazione ed inte-grazione
Sia assegnata una serie di potenze
+∞∑
n=0
an(x− x0)n .
Allora la serie
+∞∑
n=1
nan(x− x0)n−1 =
+∞∑
n=0
(n+ 1) an+1(x− x0)n
viene denominata serie ottenuta da∑+∞
n=0 an(x − x0)n per derivazione,mentre la serie
+∞∑
n=0
ann+ 1
(x− x0)n+1
viene denominata serie ottenuta da∑+∞
n=0 an(x− x0)n per integrazione.Si riconosce facilmente che
lim supn→+∞
n√|an| = lim sup
n→+∞
n√|(n+ 1) an+1| = lim sup
n→+∞
n
√∣∣∣∣an
n+ 1
∣∣∣∣ .
Pertanto, la serie ottenuta per derivazione e quella ottenuta per integra-zione hanno lo stesso raggio di convergenza della serie assegnata. Tuttavial’insieme di convergenza delle serie potrebbe differire in quanto quella otte-nuta per integrazione potrebbe convergere anche in un estremo in cui la serieassegnata non converge e analogamente quest’ultima potrebbe convergereanche in un estremo in cui la serie ottenuta per derivazione non converge.
Invece, se una serie converge in un estremo dell’intervallo di convergenzaquella da essa ottenuta per integrazione e anch’essa convergente nello stessoestremo (in quanto ha gli stessi termini divisi per n+ 1).
Ad esempio, la serie ottenuta per derivazione dalla serie geometrica edata da
+∞∑
n=0
(n+ 1)xn
che converge in ]− 1, 1[, mentre quella ottenuta per integrazione dalla seriegeometrica e data da
+∞∑
n=0
1
n+ 1xn+1

330 Capitolo 11: Successioni e serie di funzioni
che converge questa volta in [−1, 1[.
Si consideri una serie di potenze∑+∞
n=0 an(x− x0)n e sia R il suo raggiodi convergenza; supposto R > 0, si puo considerare la funzione sommaf : I → R definita nell’intervallo di convergenza della serie. Applicandoil Teorema 11.3.2, si ottiene subito che f e sempre una funzione continuanell’intervallo ]x0 −R, x0 +R[.
Come conseguenza del teorema di Abel (vedasi la discussione delle pro-prieta del raggio di convergenza) e del Teorema 11.3.2, se uno degli estremidell’intervallo I di convergenza della serie appartiene ad I, allora la funzionesomma e continua in tale estremo.
Inoltre, dal Teorema 11.3.4 di derivazione termine a termine, si ricavache la funzione somma f e infinite volte derivabile in ]x0−R, x0+R[ e le suederivate si possono ottenere dalle serie ottenute per derivazione da quellaassegnata.
Infine, dal Teorema 11.3.3 di integrazione termine a termine, segue che,per ogni x ∈]x0 −R, x0 +R[, si ha
∫ x
x0
+∞∑
n=0
an(t− x0)n dt =
+∞∑
n=0
an
∫ x
x0
(t− x0)n dt =
+∞∑
n=0
ann+ 1
(x− x0)n+1 ,
e tale uguaglianza vale anche per x = x0 − R oppure per x = x0 + R se laserie di potenze converge in tali punti.
11.6 Serie di Taylor
La formula di Taylor consente di approssimare una funzione sufficientementeregolare (cioe derivabile un certo numero di volte) in un intorno di un fissatopunto x0 mediante opportuni polinomi che dipendono dal valore della fun-zione e da quello delle sue derivate nel punto x0. Si vuole ora approfondiretale proprieta utilizzando le serie di potenze.
Sia I un intervallo di R e si consideri una funzione f : I → R derivabileinfinite volte in un punto x0 interno ad I. La serie di potenze
+∞∑
n=0
f (n)(x0)
n!(x− x0)
n , (11.6.1)
viene denominata serie di Taylor di f di punto iniziale x0.Inoltre, si dice che f e sviluppabile in serie di Taylor in I se la serie
di potenze (11.6.1) converge puntualmente verso f in I.2 Una funzione
2Dalle proprieta delle serie di potenze, la convergenza sara automaticamente uniformein ogni intervallo chiuso e limitato contenuto in I.

11.6 Serie di Taylor 331
sviluppabile in serie di Taylor in un intorno di ogni punto interno ad I vienedenominata funzione analitica reale.
In generale non e detto che una funzione infinite volte derivabile in unpunto x0 sia sviluppabile in serie di Taylor in un intorno di tale punto. Adesempio, si consideri la funzione f : R→ R cosı definita
f(x) :=
e−1/x2
, x = 0 ,0 , x = 0 .
Allora, e facile verificare che f e infinite volte derivabile in R e tutte le suederivate sono nulle nel punto 0; pertanto, la serie di Taylor di f di puntoiniziale 0 e la funzione nulla e coincide con f solamente nel punto 0. Quindif non e sviluppabile in serie di Taylor in un intorno del punto 0.
Si vuole ora fornire un semplice criterio di sviluppabilita in serie di Tay-lor. Esso e basato sul fatto che se una funzione f : I → R e infinite voltederivabile in I, si puo applicare la formula di Taylor di ogni ordine in unpunto x0 interno ad I e si ha, per ogni x ∈ I,
f(x) =n∑
k=0
f (k)(x0)
k!(x− x0)
k +f (n+1)(ξ)
(n+ 1)!(x− x0)
n+1 ,
dove ξ ∈ I e interno all’intervallo di estremi x0 ed x e dipende da x oltre cheda n. Poiche la somma nella formula precedente coincide con quella parzialedella serie di Taylor di f , e chiaro che, se il resto della formula di Taylortende uniformemente a 0, allora f risulta sviluppabile in serie di Taylor inI. Si ha pertanto il seguente criterio.
Teorema 11.6.1 (Criterio di sviluppabilita in serie di Taylor)Sia f : I → R una funzione infinite volte derivabile in I e si supponga chele sue derivate verifichino la seguente condizione
∃ c > 0 , ∃ M > 0 t.c. ∀ n ∈ N ∀ x ∈ I : |f (n)(x)| ≤ cMn . (11.6.2)
Allora f e sviluppabile in serie di Taylor in I.
Dimostrazione. Da quanto osservato preliminarmente, considerato x0 interno ad I, perogni x ∈ I e per ogni n ∈ N, risulta
f(x) =n∑
k=0
f (k)(x0)
k!(x− x0)
k +f (n+1)(ξ)
(n+ 1)!(x− x0)
n+1 ,
con ξ ∈ I interno all’intervallo di estremi x0 ed x. Denotata con sn la somma parzialen-esima della serie di Taylor di f di punto iniziale x0, dalla formula precedente e dallacondizione (11.6.2), segue
|f(x)− sn(x)| =|f (n+1)(ξ)|(n+ 1)!
|x− x0|n+1 ≤ cMn+1
(n+ 1)!|x− x0|n+1 .
332 Capitolo 11: Successioni e serie di funzioni
Si consideri ora la serie+∞∑
n=0
Mn+1
(n+ 1)!|x− x0|n+1 ;
si ha
limn→+∞
Mn+2
(n+ 2)! |x− x0|n+2
(n+ 1)!
Mn+1 |x− x0|n+1= lim
n→+∞
M
n+ 2|x− x0| = 0
e quindi, dal criterio del rapporto, essa e convergente; da cio segue che il termine generalen-esimo deve essere infinitesimo, cioe
limn→+∞
M(n+1)
(n+ 1)!|x− x0|n+1 = 0 ,
e quindi anchelim
n→+∞|f(x)− sn(x)| = 0 ,
da cui la tesi. #
La condizione (11.6.2) e sicuramente soddisfatta nel caso in cui le deri-vate della funzione f siano equilimitate, cioe
∃ M > 0 t.c. ∀ n ∈ N ∀ x ∈ I : |f (n)(x)| ≤M .
In base al risultato precedente, si puo ora considerare lo sviluppo in seriedi Taylor di alcune funzioni elementari.
11.6.1 Funzione esponenziale
Sia a > 0 tale che a = 1 e si consideri la funzione esponenziale expa di basea. Essa e infinite volte derivabile e, per ogni n ∈ N ed x ∈ R, si ha
|D(n) expa x| = | logn a| expa x .
Pertanto, fissato un intervallo [−r, r] ⊂ R, risulta, per ogni x ∈ [−r, r],
|D(n) expa x| ≤ cMn ,
con M := | log a| e c := maxexpa(−r), expa r.Dal Teorema 11.6.1 e dall’arbitrarieta di r > 0, segue allora che la fun-
zione esponenziale e sviluppabile in serie di Taylor di punto iniziale x0 ∈ R(x0 arbitrario) in tutto R e uniformemente in ogni intervallo limitato. Inparticolare, considerando x0 = 0, si ottiene, per ogni x ∈ R,
expa x = 1 + log a x+ log2 ax2
2+ log3 a
x3
6+ · · · =
+∞∑
n=0
logn axn
n!.
Considerando la base di Nepero, la formula precedente diventa, per ognix ∈ R,
expx = 1 + x+x2
2+
x3
6+ · · · =
+∞∑
n=0
xn
n!.

11.6 Serie di Taylor 333
11.6.2 Funzione logaritmo
Dalla serie geometrica si ricava subito il seguente sviluppo in serie, per ognix ∈]− 1, 1[,
1
1 + x= 1− x+ x2 − x3 + · · · =
+∞∑
n=0
(−1)n xn . (11.6.3)
Allora, integrando termine a termine tra 0 ed x, dal Teorema 11.3.3 siottiene, per ogni x ∈]− 1, 1[,
log(1 + x) = x− x2
2+
x3
3− x4
4+ · · · =
+∞∑
n=0
(−1)n xn+1
n+ 1.
Mentre nel punto −1 la serie precedente risulta divergente, nel punto1 risulta invece convergente e pertanto, dal Teorema 11.3.2, si ottiene lasomma della serie armonica a segni alterni
log 2 =+∞∑
n=0
(−1)n 1
n+ 1.
11.6.3 Funzioni seno e coseno
Poiche le funzioni seno e coseno sono infinite volte derivabili e poiche, perogni n ∈ N ed x ∈ R,
|D(n) sinx| ≤ 1 , |D(n) cosx| ≤ 1 ,
(infatti, procedendo per induzione completa su n, si riconosce facilmenteche D(n) sinx = sin(x+nπ/2) e analogamente D(n) cosx = cos(x+nπ/2)),dal Teorema 11.6.1, si ricava che esse sono sviluppabili in serie di Taylor dipunto iniziale x0 ∈ R (x0 arbitrario) in tutto R. In particolare, considerandox0 = 0, si ottiene il seguente sviluppo in serie delle funzioni seno e coseno,valido per ogni x ∈ R e uniformemente in ogni intervallo limitato
sinx = x− x3
3!+
x5
5!− · · · =
+∞∑
n=0
(−1)n x2n+1
(2n+ 1)!,
cosx = 1− x2
2!+
x4
4!− · · · =
+∞∑
n=0
(−1)n x2n
(2n)!.

334 Capitolo 11: Successioni e serie di funzioni
11.6.4 Funzione arcotangente
Considerato x2 al posto di x nella (11.6.3), si ottiene, per ogni x ∈]− 1, 1[,
1
1 + x2= 1− x2 + x4 − x6 + · · · =
+∞∑
n=0
(−1)n x2n .
Integrando termine a termine tra 0 ed x, dal Teorema 11.3.3 si ricava, perogni x ∈]− 1, 1[,
arctanx = x− x3
3+
x5
5− x7
7+ · · · =
+∞∑
n=0
(−1)n x2n+1
2n+ 1.
La serie converge anche negli estremi −1 ed 1 e pertanto la convergenza euniforme in [−1, 1]. Dal Teorema 11.3.2, si ottiene allora il seguente sviluppoin serie del numero π
π
4= arctan 1 =
+∞∑
n=0
(−1)n 1
2n+ 1= 1− 1
3+
1
5− 1
7+ . . . .
11.6.5 La serie binomiale
Si fissi α ∈ R e la funzione fα(x) := (1 + x)α, definita per x ∈] − 1,∞[ (seα > 0, la funzione e definita anche in −1 e fα(−1) = 0).
Essa e derivabile infinite volte in ]− 1,+∞[ e si ha
Dn(1 + x)α = α(α− 1) · · · (α− n+ 1) (1 + x)α−n , x > −1 .
La formula precedente suggerisce l’introduzione del coefficiente binomia-le generalizzato
(α
n
):=
⎧⎨
⎩
1 , n = 0 ,
α(α− 1) · · · (α− n+ 1)
n!, n = 0 ,
(11.6.4)
il quale ha molte proprieta analoghe a quelle dei coefficienti binomiali e chesi omettono per brevita.
La serie di Taylor di fα di punto iniziale 0 e data da
+∞∑
n=0
(α
n
)xn . (11.6.5)
Tale serie ha raggio di convergenza 1 in quanto, dal criterio del rapporto,
limn→+∞
∣∣∣∣∣
( αn+1
)(αn
)∣∣∣∣∣ = lim
n→+∞
∣∣∣∣α · · · (α− n+ 1)(α− n)n!
α · · · (α− n+ 1) (n+ 1)!
∣∣∣∣ = limn→+∞
n− αn+ 1
= 1 .

11.6 Serie di Taylor 335
Pertanto, la serie converge puntualmente in ] − 1, 1[ ed uniformemente inogni intervallo [−r, r] con 0 < r < 1.
Per quanto riguarda la convergenza della serie binomiale (11.6.5) neipunti estremi, si ha quanto segue
1. Se α ≤ −1, la serie binomiale non converge in alcuno dei due estremi.
2. Se −1 < α < 0, la serie converge (non assolutamente) in 1 ma non in−1.
3. Se α > 0, la serie converge (anche assolutamente) in entrambi gliestremi.
Per brevita ci si limita ad osservare che in entrambi gli estremi dal criterio di Raabe
segue la convergenza assoluta nel caso α > 0 e l’assoluta divergenza nel caso α < 0. Se
α ≤ −1, la successione dei coefficienti binomiali generalizzati(αn
)non e infinitesima e
pertanto la serie in esame non puo convergere. Infine, se −1 < α < 0, la convergenza in
1 segue dal criterio di Leibnitz.
Si studia ora la somma della serie (11.6.5). Si denoti per brevita con gla funzione somma della serie (11.6.5); dalle proprieta delle serie di potenzeed applicando il Teorema 11.3.4 di derivazione termine a termine, per ognix ∈]− 1, 1[
g′(x) =+∞∑
n=1
nα(α− 1) · · · (α− n+ 1)
n!xn−1
=+∞∑
n=1
α(α− 1) · · · (α− n+ 1)
(n− 1)!xn−1
= α+∞∑
n=0
(α− 1) · · · (α− 1− n+ 1)
n!xn
= α+∞∑
n=0
(α− 1
n
)xn ;
da cio si ottiene, utilizzando le proprieta dei coefficienti binomiali genera-

336 Capitolo 11: Successioni e serie di funzioni
lizzati3
(1 + x) g′(x) = α+∞∑
n=0
(α− 1
n
)xn + α
+∞∑
n=0
(α− 1
n
)xn+1
= α+∞∑
n=0
(α− 1
n
)xn + α
+∞∑
n=1
(α− 1
n− 1
)xn
= α
(1 +
+∞∑
n=1
((α− 1
n
)+
(α− 1
n− 1
))xn
)
= α
(1 +
+∞∑
n=1
(α
n
)xn
)= α g(x) .
Quindi la funzione g e soluzione dell’equazione differenziale lineare omoge-nea
y′ =α
1 + xy ,
la quale ammette come soluzione generale y = c(1 + x)α; poiche g verificala condizione iniziale g(0) = 1 deve essere c = 1 e quindi g(x) = (1 + x)α.
Pertanto, la serie binomiale (11.6.5) converge verso la funzione fα nel-l’intervallo ]− 1, 1[.
3Nell’ultima uguaglianza si e utilizzata la proprieta
(α− 1
n
)+(α− 1
n− 1
)=(αn
),
che e ovvia se n = 1 mentre per ogni n ≥ 2 segue da
(α− 1
n
)+(α− 1
n− 1
)=
(α− 1)(α− 2) · · · (α− 1− n+ 1)
n!
+(α− 1)(α− 2) · · · (α− 1− n+ 2)
(n− 1)!
=(α− 1)(α− 2) · · · (α− n)
n!+
(α− 1)(α− 2) · · · (α− n+ 1)
(n− 1)!
=(α− 1)(α− 2) · · · (α− n+ 1)(α− n+ n)
n!
=(αn
).

11.7 Serie di Fourier 337
11.6.6 La funzione arcoseno
Considerando α = −1/2 nella serie binomiale (11.6.5), si ottiene in partico-lare, per ogni x ∈]− 1, 1],
1√1 + x
=+∞∑
n=0
(−1/2n
)xn
= 1 ++∞∑
n=1
(−1)n 1 · 3 · · · (2n− 1)
2n n!xn
= 1 ++∞∑
n=1
(−1)n (2n− 1)!!
(2n)!!xn ;
scrivendo −x2 al posto di x
1√1− x2
= 1 ++∞∑
n=1
(2n− 1)!!
(2n)!!x2n .
Integrando termine a termine tra 0 ed x quest’ultima relazione, si ottiene,per ogni x ∈]− 1, 1[,
arcsinx = x++∞∑
n=1
(2n− 1)!!
(2n)!! (2n+ 1)x2n+1 .
Si puo dimostrare che la serie a secondo membro converge anche negliestremi −1 ed 1 e pertanto, considerando ad esempio x = 1, si ottiene ilseguente ulteriore sviluppo in serie del numero π
π = 2
(1 +
+∞∑
n=1
(2n− 1)!!
(2n)!! (2n+ 1)
).
11.7 Serie di Fourier
Un ulteriore tipo di serie di funzioni frequentemente utilizzata per l’appros-simazione di funzioni periodiche e costituito dalle serie di Fourier delle qualici si vuole occupare brevemente.
Si denomina polinomio trigonometrico di ordine n ogni funzione T : R→R definita ponendo
T (x) :=a02
+n∑
k=1
(ak cos kx+ bk sin kx) , x ∈ R ,
338 Capitolo 11: Successioni e serie di funzioni
con a0, . . . , an ∈ R e b1, . . . , bn costanti reali assegnate e |an|+ |bn| > 0 (pern = 0, si assume per convenzione b0 = 0).
Una serie trigonometrica e una serie di funzioni del tipo
a02
++∞∑
n=1
(an cosnx+ bn sinnx) , x ∈ R . (11.7.1)
Quindi le somme parziali di una serie trigonometrica sono polinomi trigo-nometrici di ordine minore o uguale ad n.
Una serie trigonometrica (11.7.1) si dice serie di coseni (rispettivamente,serie di seni) se, per ogni n ≥ 1, si ha bn = 0 (rispettivamente se, per ognin ∈ N, si ha an = 0).
Lo studio di una serie trigonometrica puo essere effettuato in un interval-lo di ampiezza 2π in quanto il termine generale n-esimo della serie e sempreuna funzione periodica di periodo 2π.
Se la serie (11.7.1) converge puntualmente in un intervallo di ampiezza2π, si puo pertanto considerare la funzione somma f : R → R definitaponendo, per ogni x ∈ R,
f(x) :=a02
++∞∑
n=1
(an cosnx+ bn sinnx) ; (11.7.2)
tale funzione somma risulta essere sempre 2π-periodica e, se la convergenzae uniforme, essa e anche continua.
Un semplice criterio che fornisce la convergenza totale (e quindi unifor-me) della serie e dato dalla condizione
+∞∑
n=1
(|an|+ |bn|) .
Per ottenere ulteriori criteri, si premettono alcune considerazioni.
Si supponga che la serie trigonometrica (11.7.1) converga uniformemen-te verso una funzione f : R → R. Allora, integrando termine a terminel’uguaglianza (11.7.2) tra −π e π, si ottiene
a0 =1
π
∫ π
−πf(t) dt ,

11.7 Serie di Fourier 339
e inoltre, per ogni m ∈ N, moltiplicando entrambi i membri della (11.7.2)per cosmx, integrando tra −π e π e tenendo presenti le formule
∫ π
−πcosmx cosnx dx =
0 , m = n ,π , m = n ,
∫ π
−πsinmx sinnx dx =
0 , m = n ,π , m = n ,
∫ π
−πsinmx cosnx dx = 0 ,
si ricava anche
am =1
π
∫ π
−πf(t) cosmtdt , bm =
1
π
∫ π
−πf(t) sinmtdt , m ≥ 1 .
(11.7.3)
Si supponga ora che sia assegnata una funzione 2π-periodica f : R→ R.Se f e assolutamente integrabile in [−π,π], tutte le funzioni f(x) cosmxe f(x) sinmx sono integrabili in [−π,π] (infatti |f(x) cosmx| ≤ |f(x)| e|f(x) sinmx| ≤ |f(x)|) e quindi si possono considerare i coefficienti am e bmprecedenti. Tali coefficienti vengono denominati coefficienti di Fourier di fe la serie
1
2π
∫ π
−πf(t) dt +
1
π
+∞∑
n=1
((∫ π
−πf(t) cosnt dt
)cosnx (11.7.4)
+
(∫ π
−πf(t) sinnt dt
)sinnx
), x ∈ R ,
viene denominata serie di Fourier di f .Inoltre, si dice che f e sviluppabile in serie di Fourier se la serie (11.7.4)
e convergente ed ha per somma f(x) in ogni punto x ∈ R in cui f e continua.
Se f e pari (rispettivamente, dispari), le funzioni f(x) cosmx sono an-ch’esse pari (rispettivamente, dispari) mentre le funzioni f(x) sinmx sonodispari (rispettivamente, pari) e pertanto si ha bm = 0 per ogni m ≥ 1(rispettivamente, am = 0 per ogni m ≥ 0). Quindi la serie di Fourierdi una funzione pari (rispettivamente, dispari) e una serie di soli coseni(rispettivamente, seni).
Se I e un intervallo di R, una funzione f : I → R si dice continua atratti se ammette al piu un numero finito di punti di discontinuita, tutteeliminabili o di prima specie; pertanto, se f e continua a tratti, esiste unsottoinsieme finito H ⊂ I tale che f e continua in I"H e, per ogni x0 ∈ H,

340 Capitolo 11: Successioni e serie di funzioni
esiste ed e finito limx→x−0f(x) se x0 > inf I ed esiste ed e finito limx→x+
0f(x)
se x0 < sup I.Per brevita, nel seguito, si pone
f(x0−) := limx→x−
0
f(x) , f(x0+) := limx→x+
0
f(x) .
Inoltre, si dice che f : I → R e una funzione regolare a tratti se e continuaa tratti ed inoltre e derivabile tranne al piu in un un numero finito di punti,ognuno dei quali risulta di discontinuita di prima specie per f ′.
Una funzione 2π-periodica f : R→ R viene denominata continua a tratti(rispettivamente, regolare a tratti) se la sua restrizione all’intervallo [−π,π]risulta continua a tratti (rispettivamente, regolare a tratti).
Si osserva che una funzione 2π-periodica e continua a tratti e sicuramenteassolutamente integrabile e quindi se ne puo considerare la serie di Fourier.
Inoltre, se in piu f e anche regolare a tratti, allora f ′ e una funzionecontinua a tratti e quindi si puo considerare anche la serie di Fourier di f ′.
A questo punto si possono enunciare le seguenti proprieta delle serie diFourier, di cui per brevita viene omessa la dimostrazione.
Teorema 11.7.1 Sia f : R→ R una funzione 2π-periodica. Allora, valgo-no le seguenti proprieta:
1. Se f e continua e se i suoi coefficienti di Fourier sono tutti nulli,allora f = 0.
2. Se f e continua e se la serie di Fourier di f e uniformemente conver-gente, allora f e sviluppabile in serie di Fourier.
3. Se f e regolare a tratti, allora la serie di Fourier di f converge pun-tualmente verso la funzione f : R → R definita ponendo, per ognix ∈ R,
f(x) :=f(x+) + f(x−)
2
e quindi f e sviluppabile in serie di Fourier.
Inoltre, la convergenza e uniforme in ogni intervallo chiuso in cui f econtinua.
In particolare, se f e continua e regolare a tratti, allora la serie diFourier di f converge uniformemente verso f .
4. Se f e regolare a tratti e se am e bm sono i suoi coefficienti di Fourier,allora la serie di Fourier di f ′ si ottiene derivando termine a termine

11.7 Serie di Fourier 341
la serie di Fourier di f e inoltre, denotati con a′m e b′m i coefficientidi Fourier di f ′, si ha
a′0 = 0 , a′m = mbm , b′m = −mam , m ≥ 1 .
Analogamente, la funzione integrale F : R→ R definita ponendo, perogni x ∈ R,
F (x) :=
∫ x
0
(f(t)− a0
2
)dt ; (11.7.5)
e continua e regolare a tratti e pertanto la serie di Fourier di F conver-ge uniformemente verso F . I coefficienti di Fourier di F si ottengonointegrando termine a termine la serie di Fourier di f e quindi, denotaticon Am e Bm i coefficienti di Fourier di F , si ha
A0 = 2+∞∑
k=1
bkk
, Am = −bmm
, Bm =amm
, m ≥ 1 .
(11.7.6)
La definizione di F data nella (11.7.5) e necessaria per ottenere la continuita di F (con-siderando la condizione F (π) − F (−π) = 0). Inoltre il valore di A0 nella (11.7.6) seguedal fatto che dalla (11.7.5) deve essere F (0) = 0 e che
F (0) =A0
2+
+∞∑
k=1
(Ak cos 0 +Bk sin 0) =A0
2−
+∞∑
k=1
bkk
.
I risultati precedenti sono stati esposti per semplicita per funzioni 2π-periodiche. Se f : R → R e una funzione T -periodica, con T > 0, siottengono risultati analoghi, tenendo presente che i coefficienti di Fourier dif sono in questo caso definiti da
am =2
T
∫ T/2
−T/2f(t) cos
2πmt
Tdt , m ≥ 0 ,
bm =2
T
∫ T/2
−T/2f(t) sin
2πmt
Tdt , m ≥ 1 ,
e la serie di Fourier di f e data da
a02
++∞∑
n=1
(an cos
2πnt
T+ bn sin
2πnt
T
), x ∈ R .

Capitolo 12
Calcolo differenziale in piuvariabili
12.1 Cenni sulla struttura metrica di Rn
12.1.1 Prodotti scalari e norme
L’insieme Rn (n ≥ 1) delle n-ple di numeri reali e dotato di una strutturadi spazio vettoriale reale mediante le seguenti operazioni, definite per ognix = (x1, . . . , xn) ∈ Rn, y = (y1, . . . , yn) ∈ Rn e λ ∈ R
x+ y := (x1 + y1, . . . , xn + yn) ,
λx := (λx1, . . . ,λxn) .
La base canonica di Rn e costituita dai vettori
e1, e2, . . . , en ,
dove, per ogni i, j = 1, . . . , n, la j-esima coordinata di ei e 0 se i = j ed e 1se i = j; quindi, ei = (δij)j=1,...,n dove δij e il simbolo di Kronecker definitoponendo, per ogni i, j = 1, . . . , n,
δij :=
1 , i = j ,0 , i = j .
Poiche (ei)i=1,...,n e una base di Rn, ogni elemento x = (x1, . . . , xn) ∈ Rn
si esprime in un unico modo come combinazione lineare di e1, . . . , en ed icoefficienti di tale combinazione lineare sono proprio le componenti di x,

344 Capitolo 12: Calcolo differenziale in piu variabili
cioe
x =n∑
i=1
xi ei .
Tuttavia, nel seguito si sara maggiormente interessati ad approfondirele proprieta metriche di Rn che derivano dalla possibilita di introdurre inmodo naturale in Rn un prodotto scalare.
Per maggiore chiarezza si premette la definizione generale di prodottoscalare e qualcuna delle sue principali proprieta; di seguito si considerera ilcaso particolare del prodotto scalare di Rn.
Per semplicita si denotera con K il campo R dei numeri reali oppure ilcampo C dei numeri complessi.
Se E e uno spazio vettoriale su K, si dice che una funzione (·|·) : E×E →K e un prodotto scalare su E se sono soddisfatte le seguenti proprieta:
1. ∀ x, y, z ∈ E : (x+ y|z) = (x|z) + (y|z) ;
2. ∀ x, y ∈ E , ∀ λ ∈ K : (λx|y) = λ (x|y) ;
3. ∀ x, y ∈ E : (y|x) = (x|y) ;
4. ∀ x ∈ E : (x|x) ∈ R e (x|x) ≥ 0; inoltre (x|x) = 0⇒ x = 0.
L’elemento (x|y) di K viene denominato prodotto scalare di x ed y.
Se (·|·) : E × E → K e un prodotto scalare su E, allora valgono leseguenti ulteriori proprieta, di verifica immediata:
1. ∀ x, y, z ∈ E : (z|x+ y) = (z|x) + (z|y) ;
2. ∀ x, y ∈ E , ∀ λ ∈ K : (x|λy) = λ(x|y) ;
3. ∀ x ∈ E : (x|0) = (0|x) = 0 .
Se (·|·) : E ×E → K e un prodotto scalare su E, allora vale la seguentediseguaglianza di Cauchy-Schwarz, per ogni x, y ∈ E,
|(x|y)|2 ≤ (x|x) · (y|y) . (12.1.1)
Infatti, se y = 0, risulta (x|y) = 0 e quindi la proprieta e ovvia. Se y = 0 si ha, perogni λ ∈ R,
0 ≤ (x+ λy|x+ λy) = (x|x+ λy) + (λy|x+ λy)
= (x|x) + (x|λy) + (λy|x) + (λy|λy) = (x|x) + λ(x|y) + λ(y|x) + λ2(y|y)= (x|x) + λ(x|y) + λ(x|y) + λ2(y|y) = (x|x) + 2λRe (x|y) + λ2(y|y)≤ (x|x) + 2λ|(x|y)|+ λ2(y|y) .

12.1 Cenni sulla struttura metrica di Rn 345
Dunque, per ogni λ ∈ R, risulta 0 ≤ (x|x) + 2λ|(x|y)| + λ2(y|y) e cio comporta che il
discriminante ∆ := 4|(x|y)|2 − 4(x|x)(y|y) del polinomio (x|x) + 2λ|(x|y)| + λ2(y|y) di
secondo grado in λ deve essere negativo. Quindi |(x|y)|2 − (x|x)(y|y) ≤ 0 da cui la tesi.
Se (·|·) : E ×E → K e un prodotto scalare su E, allora vale la seguentediseguaglianza di Minkowski, per ogni x, y ∈ E,
√(x+ y|x+ y) ≤
√(x|x) +
√(y|y) .
Siano x, y ∈ E. Allora
(x+ y|x+ y) = (x|x) + (y|x) + (x|y) + (y|y) = (x|x) + (x|y) + (x|y) + (y|y)= (x|x) + 2Re (x|y) + (y|y) ≤ (x|x) + 2|(x|y)|+ (y|y)
≤ (x|x) + 2√
(x|x)√
(y|y) + (y|y) = (√
(x|x) +√
(y|y))2 ,
dove nell’ultima diseguaglianza si e usata la diseguaglianza di Cauchy-Schwarz. Conside-
rando infine le radici quadrate del primo ed ultimo termine delle diseguaglianze precedenti
si ottiene la tesi.
Si studia ora un’ulteriore nozione generale che potra essere messa inrelazione con l’esistenza del prodotto scalare.
Se E e uno spazio vettoriale su K, si dice che una funzione ∥ · ∥ : E → Re una norma su E se sono soddisfatte le seguenti proprieta:
1. ∀ x ∈ E : ∥x∥ ≥ 0 ;
2. ∀ x ∈ E : ∥x∥ = 0 ⇒ x = 0 ;
3. ∀ x ∈ E , ∀ λ ∈ K : ∥λx∥ = |λ| ∥x∥ ;
4. ∀ x, y ∈ E : ∥x+ y∥ ≤ ∥x∥+ ∥y∥ .
L’elemento ∥x∥ viene denominato norma di x e la coppia (E, ∥ · ∥) vienedenominata spazio normato su K.
Se (·|·) : E×E → K e un prodotto scalare su E, si puo definire in modonaturale una norma su E, considerando la funzione ∥ · ∥ : E → R definitaponendo, per ogni x ∈ E,
∥x∥ :=√(x|x) . (12.1.2)
Si verifica facilmente che la funzione definita dalla (12.1.2) verifica leproprieta previste nella definizione di norma; la verifica delle proprieta 1)-3) delle norme e immediata, mentre la quarta segue dalla diseguaglianzadi Minkowski. Tale norma viene denominata norma dedotta dal prodottoscalare di E.

346 Capitolo 12: Calcolo differenziale in piu variabili
La norma su uno spazio vettoriale consente a sua volta di definire inmodo naturale una distanza su E. Per precisare meglio questa proprieta, sipremette la nozione di distanza.
Se E e un insieme arbitrario, si dice distanza su E una funzione d :E × E → R verificante le seguenti proprieta, per ogni x, y, z ∈ E,
1. d(x, y) ≥ 0 ;
2. d(x, y) = 0 ⇔ x = y ;
3. (Proprieta simmetrica) d(x, y) = d(y, x) ;
4. (Proprieta triangolare) d(x, z) ≤ d(x, y) + d(y, z) .
Il numero reale d(x, y) viene denominato distanza di x da y e la coppia(E, d) viene anche denominata spazio metrico.
Se ∥ ·∥ : E → R e una norma su E, si puo definire automaticamente unadistanza su E considerando la funzione d : E × E → R definita ponendo,per ogni x, y ∈ E,
d(x, y) := ∥x− y∥ . (12.1.3)
Si verifica facilmente che le proprieta previste nella definizione di distanzadiscendono direttamente da quelle della norma. La distanza d definita dalla(12.1.3) viene denominata distanza dedotta dalla norma di E.
Come ulteriore approfondimento, si osserva che la nozione di distanza consente didefinire quella di convergenza. Precisamente, se (E, d) e uno spazio metrico e se (an)n∈Ne una successione di elementi di E, si dice che essa converge verso un elemento ℓ ∈ E see soddisfatta la seguente condizione
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n ≥ ν : d(an, ℓ) < ε .
Inoltre, si dice che (an)n∈N e una successione di Cauchy se e soddisfatta la seguentecondizione
∀ ε > 0 ∃ ν ∈ N t.c. ∀ n,m ≥ ν : d(an, am) < ε .
Si verifica facilmente che ogni successione convergente verifica la condizione di Cauchy.Il viceversa non vale in generale; se accade che ogni successione di Cauchy e ancheconvergente, si dice che (E, d) e uno spazio metrico completo.
Se la struttura dello spazio metrico (E, d) viene dedotta da una norma ∥ ·∥ e se (E, d)
e completo, allora lo spazio normato (E, ∥ · ∥) su K viene denominato spazio di Banach
su K. Se la norma di uno spazio di Banach (E, ∥ · ∥) su K viene dedotta da un prodotto
scalare (·|·), allora la coppia (E, (·|·)) viene denominata spazio di Hilbert su K.
Si puo dimostrare che la norma ∥ · ∥ di uno spazio normato (E, ∥ · ∥)deriva da un prodotto scalare se e solo se essa verifica la seguente regola delparallelogramma, per ogni x, y ∈ E,
∥x+ y∥2 + ∥x− y∥2 = 2(∥x∥2 + ∥y∥2) .
12.1 Cenni sulla struttura metrica di Rn 347
Esempio 12.1.1 1. Sia n ≥ 1 e si consideri lo spazio vettoriale realeRn. Allora la funzione (·|·) : Rn ×Rn → R definita ponendo, per ognix = (x1, . . . , xn) ∈ Rn e per ogni y = (y1, . . . , yn) ∈ Rn,
(x|y) :=n∑
i=1
xi yi (12.1.4)
e un prodotto scalare su Rn.
In questo caso la verifica delle proprieta del prodotto scalare e imme-diata.
Nel seguito, Rn verra considerato sempre munito del prodotto scalaredefinito dalla (12.1.4).
La norma dedotta dal prodotto scalare in Rn e conseguentementedefinita ponendo, per ogni x = (x1, . . . , xn) ∈ Rn,
∥x∥ =
√√√√n∑
i=1
x2i , (12.1.5)
ed infine la distanza dedotta dalla norma e definita ponendo, per ognix = (x1, . . . , xn) ∈ Rn e y = (y1, . . . , yn) ∈ Rn,
d(x, y) =
√√√√n∑
i=1
(xi − yi)2 . (12.1.6)
Si consideri una successione (am)m∈N, am = ((am)1, . . . , (am)n), dielementi di Rn. Si verifica facilmente che essa e convergente (rispetti-vamente, di Cauchy) se e solo se, per ogni i = 1, . . . , n, la successione((ai)m)m∈N e convergente (rispettivamente, di Cauchy). Allora, dalcriterio di convergenza di Cauchy per le successioni di numeri reali,segue che ogni successione di Cauchy in Rn e convergente e quindi(Rn, d) e uno spazio metrico completo. Conseguentemente, (Rn, ∥ · ∥)e uno spazio di Banach e (Rn, (·|·)) e uno spazio di Hilbert.
2. Sia n ≥ 1 e si consideri lo spazio vettoriale complesso Cn. Allo-ra la funzione (·|·) : Cn × Cn → C definita ponendo, per ogni x =(x1, . . . , xn) ∈ Cn e per ogni y = (y1, . . . , yn) ∈ Cn,
(x|y) :=n∑
i=1
xi yi (12.1.7)
e un prodotto scalare su Cn.
348 Capitolo 12: Calcolo differenziale in piu variabili
Anche in questo caso la verifica delle proprieta del prodotto scalare eimmediata.
La norma e la distanza possono essere dedotta come nel caso prece-dente e si ha, per ogni x = (x1, . . . , xn) ∈ Cn e y = (y1, . . . , yn) ∈Cn
∥x∥ =
√√√√n∑
i=1
|xi|2 , (12.1.8)
e
d(x, y) =
√√√√n∑
i=1
|xi − yi|2 . (12.1.9)
Anche ora, separando le parti reali ed immaginarie, si riconosce facil-mente che le successioni di Cauchy in Cn sono convergenti e quindianche Cn e completo come spazio metrico, di Banach come spazionormato e di Hilbert munito del suo prodotto scalare.
3. Siano a, b ∈ R tali che a < b e si consideri lo spazio vettoriale realeC([a, b]) delle funzioni continue sull’intervallo [a, b] ed a valori in R.Allora la funzione (·|·) : C([a, b])×C([a, b])→ R definita ponendo, perogni f ∈ C([a, b]) e g ∈ C([a, b]),
(f |g) :=∫ b
af(x)g(x) dx .
risulta un prodotto scalare su C([a, b]).
La norma dedotta dal prodotto scalare viene definita ponendo, perogni f ∈ C([a, b]),
∥f∥ =
√∫ b
af(x)2 dx ,
e la distanza e data, per ogni f, g ∈ C([a, b]), da
d(f, g) =
√∫ b
a|f(x)− g(x)|2 dx .
Si puo dimostrare tuttavia che con tale distanza C([a, b]) non e unospazio metrico completo.
Su C([a, b]) si puo anche definire la norma uniforme ponendo
∥f∥∞ := supx∈[a,b]
|f(x)| , f ∈ C([a, b]) , (12.1.10)

12.1 Cenni sulla struttura metrica di Rn 349
e la distanza uniforme da essa dedotta
d∞(f, g) = supx∈[a,b]
|f(x)− g(x)| , f, g ∈ C([a, b]) .
Con tale distanza, lo spazio metrico (C([a, b], d∞) risulta completo equindi (C([a, b], ∥ · ∥∞) e uno spazio di Banach. Tuttavia, in questocaso la norma non deriva da un prodotto scalare in quanto non soddisfala regola del parallelogramma.
12.1.2 Sfere ed insiemi aperti e chiusi
La distanza definita dalla (12.1.6) in Rn consente di introdurre tutte lenozioni metriche basate su tale nozione.
Siano x0 ∈ Rn e sia r > 0. Si denomina sfera aperta (rispettivamente,sfera chiusa) di centro x0 e raggio r, il seguente sottoinsieme di Rn
Br(x0) := x ∈ Rn | d(x, x0) < r (12.1.11)
(rispettivamente,
B′r(x0) := x ∈ Rn | d(x, x0) ≤ r . (12.1.12)
La definizione delle sfere aperte e chiuse consente di definire subito gliinsiemi limitati. Precisamente, un sottoinsieme A di Rn si dice limitato seesiste r > 0 tale che A ⊂ Br(0). Si e considerato per comodita il punto 0di Rn, ma esso potrebbe essere sostituito con un qualsiasi altro elemento diRn. Quindi gli insiemi limitati in Rn sono i sottoinsiemi delle sfere aperte.
Sempre partendo dalla definizione delle sfere aperte e chiuse, si possonoora introdurre le seguenti ulteriori definizioni.
1. Se A ⊂ Rn ed x0 ∈ Rn, si dice che A e un intorno di x0 se e soddisfattala condizione seguente
∃ r > 0 t.c. Br(x0) ⊂ A . (12.1.13)
2. Se A ⊂ Rn ed x0 ∈ Rn, si dice che x0 e interno ad A se A e un intornodi x0 e quindi se vale la condizione precedente (12.1.13).
L’insieme di tutti gli intorni di x0 viene denotato con il simbolo I(x0).
3. Un sottoinsieme A ⊂ Rn si dice aperto se ogni suo punto e interno(o, equivalentemente, se A e un intorno di ogni suo punto) e quindi sevale la condizione (12.1.13) per ogni x0 ∈ A.

350 Capitolo 12: Calcolo differenziale in piu variabili
4. Se A e un sottoinsieme arbitrario di Rn, si denomina interno di A
e lo si denota conA il piu grande sottoinsieme aperto contenuto
in A. PertantoA e costituito da tutti i soli i punti interni ad A o
equivalentemente e l’unione di tutti gli insiemi aperti contenuti in A.
Valgono le seguenti proprieta dell’interno di un sottoinsieme A:
i)A e sempre un insieme aperto;
ii)A ⊂ A;
iii) A =A se e solo se A e un insieme aperto.
5. Un sottoinsieme C ⊂ Rn si dice chiuso se il suo complementare Rn"Ce aperto e quindi se e solo se, per ogni punto x0 del suo complementareesiste una sfera aperta di centro x0 tutta contenuta nel complementare.
6. Se C e un sottoinsieme arbitrario di Rn, si denomina chiusura di Ce lo si denota con C il piu piccolo sottoinsieme chiuso contenente C.Pertanto C e l’intersezione di tutti gli insiemi chiusi contenenti C. Lachiusura di un sottoinsieme C puo anche essere espressa utilizzandola nozione di interno di un sottoinsieme nel modo seguente
C = Rn "︷ ︸︸ ︷
Rn " C
Valgono le seguenti proprieta della chiusura di un sottoinsieme C:
i) C e sempre un insieme chiuso;
ii) C ⊂ C;
iii) C = C se e solo se C e un insieme chiuso.
7. Se A e un sottoinsieme arbitrario di Rn, si denomina frontiera di A ela si denota con ∂A (oppure con Fr(A) il seguente sottoinsieme di Rn
∂A := A ∩ (Rn "A) .
8. Infine, si osserva che anche in Rn puo essere data la definizione dipunto di accumulazione nel modo seguente. Se A e un sottoinsieme diRn e se x0 ∈ Rn, si dice che x0 e un punto di accumulazione per A sevale la seguente condizione:
∀ δ > 0 : A ∩Bδ(x0)" x0 = ∅ ,
cioe, in ogni intorno di x0 devono esservi elementi di A diversi da x0.

12.1 Cenni sulla struttura metrica di Rn 351
12.1.3 Intervalli, rette e direzioni di Rn
Se a = (a1, . . . , an) ∈ Rn e b = (b1, . . . , bn) ∈ Rn verificano le condizioni
ai ≤ bi , i = 1, . . . , n ,
si possono considerare gli intervalli
[a, b] := x = (x1, . . . , xn) ∈ Rn | ∀ i = 1, . . . , n : ai ≤ xi ≤ bi ,
]a, b[ := x = (x1, . . . , xn) ∈ Rn | ∀ i = 1, . . . , n : ai < xi < bi ,
[a, b[ := x = (x1, . . . , xn) ∈ Rn | ∀ i = 1, . . . , n : ai ≤ xi < bi ,
]a, b] := x = (x1, . . . , xn) ∈ Rn | ∀ i = 1, . . . , n : ai < xi ≤ bi ,
i quali vengono denominati rispettivamente intervallo chiuso (rispettiva-mente, aperto, semiaperto a destra, semiaperto a sinistra) di estremi a eb.
Per molte questioni metriche sara tuttavia piu utile il concetto di sferaaperta e chiusa definito nella sezione successiva.
Si denomina direzione di Rn ogni elemento v ∈ Rn tale che ∥v∥ = 1.Si osserva che se v ∈ Rn " 0, allora v/∥v∥ e una direzione di Rn.In particolare, i vettori ei, i = 1, . . . , n, della base canonica sono parti-
colari direzioni di Rn.Se v = (v1, . . . , vn) ∈ Rn e una direzione di Rn e se x0 ∈ Rn, l’equazione
della retta passante per x0 e direzione v e data da
x = x0 + tv , t ∈ R ,
ed in coordinate parametriche⎧⎪⎪⎪⎨
⎪⎪⎪⎩
x1 = (x0)1 + tv1 ,x2 = (x0)2 + tv2 ,...xn = (x0)n + tvn ,
t ∈ R .
Se a = (a1, . . . , an) ∈ Rn e b = (b1, . . . , bn) ∈ Rn, la retta passante per ae b ha equazione
x = a+ t(b− a) , t ∈ R ,
ed in coordinate parametriche⎧⎪⎪⎪⎨
⎪⎪⎪⎩
x1 = a1 + t(b1 − a1) ,x2 = a2 + t(b2 − a2) ,...xn = an + t(bn − an) ,
t ∈ R .

352 Capitolo 12: Calcolo differenziale in piu variabili
Il segmento di estremi a e b e invece definito come segue
S[a, b] := x ∈ Rn | ∃ t ∈ [0, 1] t.c. x = a+ t(b− a) .
Una poligonale P di Rn e l’unione di un numero finito di segmenti aventi adue a due un estremo in comune; pertanto, devono esistere a0, . . . , am ∈ Rn
(denominati vertici della poligonale) tali che P = S[a0, a1]∪S[a1, a2]∪ · · ·∪S[am−1, am]. Una poligonale congiungente i punti a e b e una poligonaledel tipo precedente con a = a0 e b = am; essa viene anche denotata con ilsimbolo P [a, b] oppure con P [a0, . . . , am] se si vogliono specificare i verticidella poligonale.
Un sottoinsiemeA di Rn si dice connesso per poligonali se, per ogni x, y ∈A, esiste una poligonale P [x, y] congiungente i punti x ed y interamentecontenuta in A.
Piu in generale, un sottoinsieme A di Rn si dice connesso se non e unionedi insiemi aperti disgiunti e non vuoti; quindi A e connesso se ogni volta cheA = A1 ∪ A2 con A1 e A2 insiemi aperti disgiunti, risulta A1 = ∅ oppureA2 = ∅.
Si puo dimostrare che in Rn un sottoinsieme connesso per poligonali eanche connesso mentre il viceversa non vale (ad esempio, se si “connettono”due insiemi connessi disgiunti mediante un arco di circonferenza si ottieneun insieme connesso ma non connesso per poligonali). Tuttavia, Se A eun sottoinsieme aperto di Rn, esso e connesso se e solo se e connesso perpoligonali.1
Nel caso in cui si considerino poligonali costituite da un solo segmento,si ottengono particolari insiemi connessi di seguito definiti.
Sia A un sottoinsieme di Rn. Si dice che A e convesso se, per ognia, b ∈ A il segmento S[a, b] congiungente a e b e interamente contenuto inA.
1Si supponga che A sia un insieme aperto non connesso per poligonali e siano a ∈ Ae b ∈ A non congiungibili con una poligonale. Si considerino gli insiemi A1 := x ∈A | ∃ P [a, x] ⊂ A e A2 := x ∈ A | # P [a, x] ⊂ A; essi verificano ovviamente lecondizioni A1 ∪A2 = A, A1 ∩A2 = ∅ e inoltre A1 = ∅ (infatti a ∈ A1) e A2 = ∅ (infattib ∈ A2). Si riconosce ora che A1 ed A2 sono entrambi aperti e cio dimostrera che A none connesso. Sia x0 ∈ A1; poiche A e aperto esiste δ > 0 tale che Bδ(x0) ⊂ A; consideratauna poligonale P [a, x0] congiungente a ed x0 e contenuta in A, per ogni x ∈ Bδ(x0)la poligonale costituita da P [a, x0] e dal segmento congiungente x0 ed x risulta essereinteramente contenuta in A e congiunge a ed x, da cui x ∈ A1; quindi Bδ(x0) ⊂ A1 dacui si deduce che A1 e aperto. Sia ora x0 ∈ A2 e come prima si consideri δ > 0 taleche Bδ(x0) ⊂ A; se esistesse una poligonale P [a, x] ⊂ A congiungente a ed x allora lapoligonale costituita da P [a, x] e dal segmento congiungente x ed x0 sarebbe contenutain A e congiungerebbe a ed x0, e cio e escluso dal fatto che x0 /∈ A1; pertanto x ∈ A2 dacui Bδ(x0) ⊂ A2 e quindi A2 e aperto.

12.2 Funzioni di piu variabili 353
Si osservi che un insieme convesso e anche connesso (in quanto e ovvia-mente connesso per poligonali), ma il viceversa non vale. Ad esempio, ilsottoinsieme A := ([−1, 0]× [0, 1/2]) ∪ [0, 1]2 e connesso ma non convesso.
x
y
Figura 12.1: Esempio di insieme connesso ma non convesso.
12.2 Funzioni di piu variabili
Una funzione di n variabili reali e una funzione definita in un sottoinsiemedi Rn con n ≥ 1. Se tale funzione e a valori in R essa viene denominatafunzione reale di n variabili reali.
Per molti aspetti, lo studio di una funzione di piu variabili puo esserecondotto con metodi simili a quelli utilizzati per le funzioni di una variabilereale; ad esempio, lo studio dell’insieme di definizione e le stesse definizionidi limite e di continuita per funzioni di piu variabili non presentano novitasostanziali. Invece, il calcolo differenziale e lo studio dei massimi e minimirelativi ed assoluti (e vincolati) necessita di un approccio sostanzialmentepiu articolato rispetto a quello utilizzato per le funzioni di una sola variabile.
Ad esempio, si consideri la funzione di due variabili
f(x, y) := y log(xy) + x2 esin(x+y) .
Le condizioni da imporre per determinare l’insieme di definizione riguardanosolamente la funzione logaritmo in quanto le altre funzioni sono definite perqualsiasi valore reale del loro argomento. Pertanto si deve imporre xy > 0e quindi la funzione e definita nel primo e nel terzo quadrante (esclusi gli

354 Capitolo 12: Calcolo differenziale in piu variabili
assi):
Xf := (x, y) ∈ R2 | x > 0 , y > 0 ∪ (x, y) ∈ R2 | x < 0 , y < 0= ]0,+∞[2∪]−∞, 0[2 .
Si osservi che la funzione e definita in un sottoinsieme aperto non limitatodi R2.
Come ulteriore esempio si consideri la funzione di tre variabili
f(x, y, z) :=√
1− x2 − y2 + arcsin z .
Per determinare l’insieme di definizione, bisogna imporre le condizioni
1− x2 − y2 ≥ 0 ,−1 ≤ z ≤ 1 ,
e quindi la funzione e definita nel cilindro di R3 che ha come base il cerchio dicentro l’origine e raggio 1 nel piano xy ed altezza l’intervallo [−1, 1] sull’assez:
Xf := (x, y, z) ∈ R3 | x2 + y2 ≤ 1 , −1 ≤ z ≤ 1= (x, y) ∈ R2 | x2 + y2 ≤ 1 × [−1, 1] .
La funzione e definita in un sottoinsieme chiuso e limitato di R3.
Viene fornita ora la definizione di limite per le funzioni di piu variabili.Come si puo notare, essa e del tutto analoga a quella gia nota per le funzionidi una variabile reale.
Definizione 12.2.1 Siano A ⊂ Rn ed f : A→ R una funzione reale di piuvariabili reali. Se x0 ∈ Rn e un punto di accumulazione per A e se ℓ ∈ R,si dice che ℓ e il limite di f per x tendente verso x0 e si scrive
limx→x0
f(x) = ℓ , oppure lim(x1,...,xn)→((x0)1,...,(x0)n)
f(x1, . . . , xn) = ℓ ,
se e soddisfatta le condizione seguente
∀ I ∈ I(ℓ) ∃ δ > 0 t.c. ∀ x ∈ A ∩Bδ(x0)" x0 : f(x) ∈ I . (12.2.1)
Se ℓ ∈ R la condizione (12.2.1) e equivalente alla seguente
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ A ∩Bδ(x0)" x0 : |f(x)− ℓ| < ε , (12.2.2)
mentre se ℓ = +∞ (rispettivamente, ℓ = −∞), e equivalente alla seguente
∀ M ∈ R ∃ δ > 0 t.c. ∀ x ∈ A ∩Bδ(x0)" x0 : f(x) > M (12.2.3)
(rispettivamente f(x) < M ).

12.2 Funzioni di piu variabili 355
Vista la naturale generalizzazione della definizione di limite al caso dipiu variabili, molti risultati ottenuti per le funzioni di una variabile riman-gono validi anche nel caso in esame, come le proprieta di unicita del limite,della permanenza del segno, della limitatezza locale, della monotonia del li-mite ed i teoremi di confronto e sulle operazioni sui limiti; non hanno invecepiu significato, vista la struttura di Rn, i limiti da sinistra e da destra ed iteoremi riguardanti funzioni monotone (in quanto tale nozione non ha sensoin piu variabili). Per brevita, si omette in questa fase di enunciare tali ri-sultati, riservandosi di richiamarli in maniera piu dettagliata ogni qualvoltavengano utilizzati nel seguito.
Si consideri il seguente limite
lim(x,y)→(0,1)
log(1 + x3y2)√x2 + (y − 1)2
.
Esso si presenta nella forma indeterminata 0/0. Sebbene sia possibile uti-lizzare i limiti notevoli ed ottenere il limite
lim(x,y)→(0,1)
log(1 + x3y2)√x2 + (y − 1)2
= lim(x,y)→(0,1)
log(1 + x3y2)
x3y2x3y2√
x2 + (y − 1)2
= lim(x,y)→(0,1)
x3y2√x2 + (y − 1)2
,
risulta comunque problematico effettuare un confronto tra i due infinitesimial numeratore ed al denominatore.
Si puo allora ricorrere ad un metodo di frequente utilizzo che consistenell’effettuare dapprima una traslazione in modo che il limite venga calcolatonel punto (0, 0) e poi nel passaggio alle coordinate polari. Infatti, postou := x e v := y − 1, l’ultimo limite diventa
lim(x,y)→(0,1)
x3y2√x2 + (y − 1)2
= lim(u,v)→(0,0)
u3(1 + v)2√u2 + v2
,
e a questo punto, posto u := ρ cos θ, v := ρ sin θ, si ottiene il limite
limρ→0+
ρ3 cos3 θ(1 + ρ sin θ)2
ρ= limρ→0+
ρ2 cos3 θ(1 + ρ sin θ)2 = 0 .
Si osservi che l’ultima uguaglianza e giustificata dal fatto che il limite tendea 0 indipendente da θ; infatti il fattore cos3 θ(1 + ρ sin θ)2 e limitato in unintorno del punto ρ = 0 e quindi
−Mρ2 ≤ ρ2 cos3 θ(1 + ρ sin θ)2 ≤Mρ2 ,

356 Capitolo 12: Calcolo differenziale in piu variabili
con M > 0 costante opportuna; poiche limρ→0+ Mρ2 = 0, per confronto siottiene che anche il limite assegnato e 0.
Si passa ora a considerare la nozione di continuita.
Definizione 12.2.2 Siano A ⊂ Rn ed f : A→ R una funzione reale di piuvariabili reali. Se x0 ∈ A, si dice che f e continua in x0 se e soddisfatta lecondizione seguente
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ A ∩Bδ(x0) : |f(x)− f(x0)| < ε . (12.2.4)
Se x0 e un punto di accumulazione per A, la condizione precedenteequivale a limx→x0 f(x) = f(x0), mentre se x0 ∈ A non e un punto diaccumulazione per A, allora f e automaticamente continua in x0.
Si dira poi che f e continua in un sottoinsieme B ⊂ A se e continua inogni x0 ∈ B.
Infine, si dice che f e continua se e continua in ogni x0 ∈ A.Le nozioni di continuita a destra ed a sinistra non hanno significato per
le funzioni di piu variabili, mentre e possibile estendere il seguente risultato,di cui per brevita viene omessa la dimostrazione.
Teorema 12.2.3 (Teorema di Weierstrass in piu variabili)Siano A un sottoinsieme chiuso e limitato di Rn ed f : A→ R una funzionereale continua. Allora f e dotata di minimo e di massimo, cioe esistonoc, d ∈ A tali che, per ogni x ∈ A, f(c) ≤ f(x) ≤ f(d).
Anche il teorema degli zeri puo essere generalizzato nel caso di funzionidi piu variabili nel modo seguente.
Teorema 12.2.4 (Teorema degli zeri in piu variabili)Siano A un sottoinsieme di Rn ed f : A → R una funzione reale continua.Se a, b ∈ A sono tali che f(a) · f(b) < 0 e se esiste una poligonale P [a, b] diestremi a e b interamente contenuta in A, allora esiste c ∈ A (in particolarec ∈ P [a, b]) tale che f(c) = 0.
Dimostrazione. Basta applicare il teorema degli zeri per funzioni di una variabile reale
alla restrizione di f alla poligonale P [a, b]. #
12.3 Derivate direzionali e parziali e differen-ziabilita
Alcune nozioni introdotte nel seguito sono basate su proprieta elementaridelle funzioni lineari, che per comodita si preferisce richiamare preliminar-mente.

12.3 Derivate direzionali e parziali e differenziabilita 357
12.3.1 Funzioni lineari
Se E ed F sono spazi vettoriali su K (si ricorda che K denota l’insieme deinumeri reali R oppure quello dei numeri complessi C), una funzione lineareda E in F e una funzione L : E → F che verifica le seguenti condizioni, perogni x, y ∈ Rn e λ ∈ K,
L(x+ y) = L(x) + L(y) , L(λx) = λL(x) .
Una funzione lineare L : E → K viene denominata anche funzionale linearesu E.
In particolare, i funzionali lineari su Rn sono funzioni lineari L : Rn → R.Una proprieta importante di tali funzionali lineari riguarda il fatto che ivalori dipendono solamente da quelli assunti sui vettori della base cano-nica; infatti, per ogni x = (x1, . . . , xn) ∈ Rn, risulta x =
∑ni=1 xi ei e
conseguentemente, dalle condizioni di linearita,
L(x) = L
(n∑
i=1
xi ei
)=
n∑
i=1
L(xi ei) =n∑
i=1
L(ei)xi . (12.3.1)
Si deduce in particolare che due funzionali lineari che assumono lo stessovalore sui vettori della base canonica devono necessariamente coincidere.
Considerato il vettore eL := (L(e1), . . . , L(en)), e ricordando la defini-zione del prodotto scalare in Rn, la formula precedente puo essere scrittacome segue
L(x) = (eL|x) . (12.3.2)
In generale, quindi, un funzionale lineare su Rn e del tipo
L(x1, . . . , xn) = a1 x1 + · · ·+ an xn , (x1, . . . , xn) ∈ Rn ,
con a1, . . . , an ∈ R costanti fissate (inoltre ai = L(ei) per ogni i = 1, . . . , n).In particolare i funzionali lineari su R, R2 ed R3 assumono rispettiva-
mente la forma
L(x) = ax , L(x, y) = ax+ by , L(x, y, z) = ax+ by + cz ,
con a, b, c ∈ R fissati ed x, y, z ∈ R.Dall’espressione ottenuta dei funzionali lineari segue subito che essi sono
funzioni continue in quanto somma di n funzioni potenza di grado 1.
Sia L : Rn → R un funzionale lineare su Rn. Allora, l’insieme dei punti
ΠL := (x1, . . . , xn, y) ∈ Rn+1 | y = L(x1, . . . , xn) (12.3.3)
= (x, y) ∈ Rn × R | y = (eL|x)

358 Capitolo 12: Calcolo differenziale in piu variabili
e un sottospazio vettoriale di Rn+1, denominato iperpiano generato da L.Se x0 ∈ Rn e se y0 ∈ R, si puo considerare l’iperpiano ΠL,(x0,y0) generato
da L e passante per (x0, y0)
ΠL,(x0,y0) := (x, y) ∈ Rn × R | y = y0 + L(x− x0) ,
:= (x, y) ∈ Rn × R | y = y0 + (eL|x− x0) ,
la cui equazione e data da
y = y0 + L(x− x0) , x ∈ Rn , y ∈ R ,
oppure, utilizzando il prodotto scalare,
y = y0 + (eL|x− x0) , x ∈ Rn , y ∈ R .
12.3.2 Derivate direzionali e parziali
Siano A un sottoinsieme di Rn ed f : A→ R una funzione reale di n variabilireali. Se x0 ∈ A e un punto interno ad A e se v ∈ Rn e una direzione di Rn,l’insieme
Ix0,v := t ∈ R | x0 + tv ∈ A
contiene un intorno del punto 0.2 Si puo quindi considerare la funzionefx0,v : Ix0,v → R definita ponendo, per ogni t ∈ Ix0,v,
fx0,v(t) = f(x0 + tv) ,
la quale e definita in un intorno dello 0; tale funzione rappresenta la restri-zione della funzione f alla retta passante per x0 di direzione v (si osserviche il punto x0 si ottiene per t = 0 dall’equazione della retta).
Si puo a questo punto assumere la seguente definizione.
Definizione 12.3.1 Si dice che f e derivabile in x0 rispetto alla direzionev se fx0,v e derivabile in 0; in tal caso, f ′
x0,v(0) viene denominata derivata
direzionale di f in x0 rispetto alla direzione v e denotata con∂f
∂v(x0).
Si ha pertanto
∂f
∂v(x0) := lim
t→0
fx0,v(t)− fx0,v(0)
t= lim
t→0
f(x0 + tv)− f(x0)
t
2Infatti, x0 e interno ad A e quindi esiste δ > 0 tale che Bδ(x0) ⊂ A; allora, perogni t ∈] − δ, δ[, risulta d(x0 + tv, x0) = ∥x0 + tv − x0∥ = |t| ∥v∥ = |t| < δ e quindi]− δ, δ[⊂ Ix0,v.

12.3 Derivate direzionali e parziali e differenziabilita 359
e, denotate con (v1, . . . , vn) le componenti di v, si puo scrivere
∂f
∂v(x0) = lim
t→0
f((x0)1 + tv1, . . . , (x0)n + tvn)− f((x0)1, . . . , (x0)n)
t.
In particolare, fissato i = 1, . . . , n, si puo considerare la direzione ei dellabase canonica. In questo caso, la derivata direzionale di f in x0 rispettoalla direzione ei viene denominata derivata parziale i-esima (oppure rispettoalla i-esima variabile) e denotata con il simbolo
∂f
∂xi(x0) .
Pertanto, da quanto osservato sopra e tenendo presente che x0 + tei =(x0)1, . . . , (x0)n) + t(0, . . . , 1, . . . , 0) = ((x0)1, . . . , (x0)i + t, . . . , (x0)n),
∂f
∂xi(x0) = lim
t→0
f(x0 + tei)− f(x0)
t
= limt→0
f((x0)1, . . . , (x0)i + t, . . . , (x0)n)− f((x0)1, . . . , (x0)n)
t.
Quindi, la derivata parziale rispetto alla variabile i-esima viene effettuataconsiderando costanti le variabili diverse da quella i-esima e derivando lafunzione come se dipendesse dall’unica variabile xi. Cio suggerisce un sem-plice criterio sia per riconoscere che una funzione e derivabile parzialmenterispetto ad un’assegnata variabile che per calcolarne la derivata parziale,utilizzando gli stessi metodi e le stesse regole di derivazione gia viste per lefunzioni di una sola variabile reale.
Ad esempio, si consideri la funzione
f(x, y) := ex+y + cos(xy) .
Fissato y ∈ R, la funzione parziale fy(x) := f(x, y), dipendente dalla solavariabile x, e derivabile in tutto R e si ha fy(x) = ex+y − y sin(xy); per-tanto, dall’arbitrarieta di y ∈ R, si conclude che f e derivabile parzialmenterispetto ad x in ogni (x, y) ∈ R2 e si ha
∂f
∂x(x, y) = ex+y − y sin(xy) .
In modo analogo, fissato x ∈ R, la funzione parziale fx(y) := f(x, y), di-pendente dalla sola variabile y, e derivabile in tutto R e si ha fx(y) =ex+y − x sin(xy); pertanto, dall’arbitrarieta di x ∈ R, si conclude che f ederivabile parzialmente anche rispetto ad y in ogni (x, y) ∈ R2 e si ha
∂f
∂y(x, y) = ex+y − x sin(xy) .

360 Capitolo 12: Calcolo differenziale in piu variabili
Se f : A → R e derivabile parzialmente rispetto ad ogni variabile inun punto x0 ∈ A, si puo considerare il gradiente di f in x0, denotato con∇f(x0) (oppure con grad f(x0)), e definito come segue
∇f(x0) :=
(∂f
∂x1(x0), . . . ,
∂f
∂xn(x0)
)(12.3.4)
In generale non vi e un legame tra le derivate parziali e le derivatedirezionali, per cui la conoscenza delle derivate parziali non e sufficiente perdeterminare tutte le derivate direzionali della funzione in un fissato punto.
I concetti precedenti sono basati su una generalizzazione analitica delconcetto di derivata; infatti si considera una retta passante per x0 e sirestringe la funzione a tale retta (intersecata con l’insieme di definizione)ottenendo cosı una funzione di una variabile per la quale si puo considerare laderivata gia nota per tali funzioni. La difficolta di introdurre un concetto piugenerale dipende dal fatto che il rapporto incrementale (f(x)− f(x0))/(x−x0) non ha significato per le funzioni di piu variabili.
Tuttavia, il prossimo obiettivo e quello di introdurre una nozione piuforte che tenga conto del comportamento della funzione in tutto un intornodi x0 e non solo su una particolare retta.
In tali casi dall’esistenza delle derivate parziali si potra ricavare anchequella delle derivate rispetto ad una qualsiasi direzione.
Di tale proprieta ci si occupa nella sezione successiva.
12.3.3 Differenziabilita
Si studia ora il concetto di funzione differenziabile in un punto. Tale concet-to trae spunto dall’interpretazione geometrica della derivata per le funzionidi una variabile.
Infatti se f : I → R e una funzione definita in un intervallo I ⊂ R e sex0 ∈ I, e noto che f e derivabile in x0 se e solo se il suo grafico e dotatodi retta tangente non verticale nel punto (x0, f(x0)); tra tutte le rette diequazione y = f(x0) + a(x− x0) passanti per (x0, f(x0)) la retta tangente,che ha equazione y = f(x0)+f ′(x0)(x−x0), e l’unica che verifica la seguentecondizione
limx→x0
f(x)− (f(x0) + f ′(x0)(x− x0))
x− x0= 0
(infatti
limx→x0
f(x)− (f(x0) + f ′(x0)(x− x0))
x− x0= lim
x→x0
(f(x)− f(x0)
x− x0− f ′(x0)
)= 0 ) .

12.3 Derivate direzionali e parziali e differenziabilita 361
Pertanto la definizione di derivabilita in x0 equivale a richiedere l’esi-stenza di un numero a ∈ R tale che
limx→x0
f(x)− f(x0)− a(x− x0)
|x− x0|= 0
(si e potuto dividere per |x− x0| anziche per x− x0 proprio perche il limitee stato posto uguale a 0) e in tal caso il numero a risulta essere propriof ′(x0).
Si considerino ora un sottoinsieme A di Rn, un punto interno x0 ad Aed una funzione reale f : A → R di n variabili reali. Si ricorda che i pianipassanti per il punto (x0, f(x0)) hanno equazione y = f(x0) + L(x − x0)dove L : Rn → R e un funzionale lineare su Rn e quindi si puo richiedere,analogamente al caso delle funzioni di una variabile, che esista uno di talipiani verificante la condizione
limx→x0
f(x)− f(x0)− L(x− x0)
∥x− x0∥= 0 .
Cio conduce alla seguente definizione.
Definizione 12.3.2 Siano A un sottoinsieme di Rn, x0 ∈ A un puntointerno ad A ed f : A → R una funzione reale di n variabili reali. Si diceche f e differenziabile in x0 se esiste un funzionale lineare L : Rn → R taleche
limx→x0
f(x)− f(x0)− L(x− x0)
∥x− x0∥= 0 . (12.3.5)
Il funzionale lineare L previsto nella definizione precedente e unico3 eviene denominato differenziale di f in x0 e denotato con df(x0).
Da quanto osservato, la definizione di differenziabilita in x0 equiva-le a richiedere l’esistenza di un piano in Rn+1 tangente al grafico della
3Infatti, si supponga che L1 ed L2 siano funzionali lineari verificanti la (12.3.5). Siconsideri δ > 0 tale che Bδ(x0) ⊂ A e sia 0 < t < δ; allora, per ogni i = 1, . . . , n, risultax0 + t ei ∈ A e inoltre
L1(ei)− L2(ei) =L1(t ei)− L2(t ei)
t=
L1(x0 + t ei − x0)− L2(x0 + t ei − x0)
t
=f(x0 + t ei)− f(x0)− L2(x0 + t ei − x0)
∥x0 + tei − x0∥
−f(x0 + t ei)− f(x0)− L1(x0 + t ei − x0)
∥x0 + tei − x0∥;
quindi, considerando il limite per t → 0, dalla (12.3.5) si ottiene L1(ei) = L2(ei). Poichei = 1, . . . , n e arbitrario, i funzionali lineari L1 ed L2 coincidono sui vettori della basecanonica e quindi devono essere uguali.

362 Capitolo 12: Calcolo differenziale in piu variabili
funzione f nel punto (x0, f(x0)). Tale piano ha equazione y = f(x0) +df(x0)(x− x0) (oppure anche y = f(x0) + (∇f(x0)|x− x0)) oppure, ancorapiu esplicitamente,
y = f(x0) +n∑
i=1
∂f
∂xi(x0) (xi − (x0)i) , x = (x1, . . . , xn) ∈ Rn , y ∈ R ,
ed e pertanto univocamente individuato dal valore della funzione in x0 e daquello delle sue derivate parziali in x0.
Si osservi che per n = 1 si ottiene l’equazione gia nota della rettatangente al grafico di f nel punto (x0, f(x0)).
Si studiano subito alcune proprieta delle funzioni differenziabili.
Teorema 12.3.3 Siano A un sottoinsieme di Rn, x0 ∈ A un punto internoad A ed f : A→ R una funzione differenziabile in x0. Allora f e continuain x0.
Dimostrazione. Dalla definizione di differenziabilita e dalla continuita di df(x0) seguesubito
limx→x0
f(x) = limx→x0
(f(x)− f(x0)− df(x0)(x− x0)
∥x− x0∥∥x− x0∥+ f(x0)
+ df(x0)(x− x0))
= f(x0) + limx→x0
f(x)− f(x0)− df(x0)(x− x0)
∥x− x0∥∥x− x0∥
= f(x0)
e quindi la tesi. #
Si osservi che se f e derivabile rispetto ad ogni direzione in x0 non e dettoche essa sia continua in x0 (risulta essere continua solamente la restrizionedi f ad ogni retta passante per x0).
Esempio 12.3.4 Si consideri la funzione f : R2 → R definita ponendo, perogni (x, y) ∈ R2,
f(x, y) :=
x2/y , y = 0 ,0 , y = 0 .
Si consideri il punto (0, 0) e sia v = (ξ, η) una direzione di R2; allora, seη = 0, si ha
limt→0
f(tξ, tη)− f(0, 0)
t= lim
t→0
(tξ)2/(tη)
t=ξ2
η,

12.3 Derivate direzionali e parziali e differenziabilita 363
mentre, se η = 0, risulta
limt→0
f(tξ, tη)− f(0, 0)
t= 0 ;
dunque, f e derivabile rispetto ad ogni direzione nel punto (0, 0) e si ha
∂f
∂v(0, 0) =
ξ2/η , η = 0 ,0 , η = 0 ,
v = (ξ, η) .
Tuttavia f non e continua in (0, 0) in quanto, ad esempio, sulla curva diequazione y = x2, passante per (0, 0), assume il valore 1 in ogni puntodiverso da (0, 0) mentre in (0, 0) assume il valore 0.
In realta, sempre con riferimento all’esempio considerato, l’esistenza delle derivate
direzionali comporta la continuita in 0 della restrizione di f ad ogni retta passante per
l’origine; questo, in termini analitici, vuol dire che, fissato ε > 0 e fissata una direzione
v = (ξ, η) di R2, esiste δ > 0 tale che, per ogni t ∈]−δ, δ[, si abbia |f(tξ, tη)−f(0, 0)| < ε;
tuttavia, in questo caso il numero δ > 0 dipende dalla direzione oltre che da ε (si puo
riconoscere facilmente che, imponendo la condizione |(tξ)2/(tη)| = |f(tξ, tη)−f(0, 0)| < ε
deve essere δ = ε/ξ per ogni ξ = 0) e quindi non e possibile considerare una sfera di centro
l’origine in cui vale la diseguaglianza |f(x, y)− f(0, 0)| < ε.
La differenziabilita di una funzione in un punto comporta l’esistenzain tal punto di tutte le derivate direzionali; inoltre, le derivate direzionalipossono essere espresse mediante il differenziale, come dimostra il seguenterisultato.
Teorema 12.3.5 Siano A un sottoinsieme di Rn, x0 ∈ A un punto internoad A ed f : A → R una funzione differenziabile in x0. Allora, per ognidirezione v ∈ Rn di Rn, f e derivabile in x0 rispetto alla direzione v e si ha
∂f
∂v(x0) = df(x0)(v) . (12.3.6)
Dimostrazione. Per dimostrare la tesi e sufficiente riconoscere che
limt→0
f(x0 + tv)− f(x0)
t= df(x0)(v) ;
dalla definizione di differenziabilita segue, ponendo x = x0 + tv,
limt→0
f(x0 + tv)− f(x0)− df(x0)(tv)
∥tv∥= 0 ,
e quindi, dalla linearita di df(x0), dalla limitatezza del rapporto t/|t| per ogni t = 0 etenendo presente che ∥tv∥ = |t| ∥v∥ = |t|, si ha anche
limt→0
(f(x0 + tv)− f(x0)
t− df(x0)(v)
)= lim
t→0
f(x0 + tv)− f(x0)− t df(x0)(v)
t
= limt→0
f(x0 + tv)− f(x0)− df(x0)(tv)
∥tv∥|t|t
= 0 ,

364 Capitolo 12: Calcolo differenziale in piu variabili
da cui segue direttamente la tesi. #
Il viceversa del risultato precedente non vale in generale e quindi unafunzione potrebbe essere derivabile rispetto ad ogni direzione in un puntopur non essendo differenziabile in tale punto; ad esempio, la funzione con-siderata nell’Esempio 12.3.4 e derivabile rispetto ad ogni direzione in (0, 0),ma non puo essere differenziabile in tale punto altrimenti, per il Teorema12.3.3, dovrebbe essere continua in (0, 0).
In particolare il risultato precedente asserisce che una funzione differen-ziale in x0 e dotata in tal punto anche di tutte le derivate parziali e dalla(12.3.6) si ha, per ogni i = 1, . . . , n,
∂f
∂xi(x0) = df(x0)(ei) . (12.3.7)
Quindi i valori che il differenziale assume nei vettori della base canonica sonoproprio le derivate parziali di f in x0; ricordando che tali valori determinanounivocamente il differenziale, dalle espressioni (12.3.1) e (12.3.2) si ottienela seguente espressione del differenziale, per ogni x = (x1, . . . , xn) ∈ Rn,
df(x0)(x) =n∑
i=1
∂f
∂xi(x0)xi = (∇f(x0)|x) . (12.3.8)
Utilizzando la definizione del gradiente di f in x0 data dalla (12.3.4), il differenzialeassume anche la seguente espressione
df(x0)(x) = (∇f(x0)|x) , x ∈ Rn ,
e la condizione di differenziabilita si puo anche scrivere nel modo seguente
limx→x0
f(x)− f(x0)− (∇f(x0)|x− x0)
∥x− x0∥= 0 .
In particolare, dalla (12.3.8) si ricava, per ogni direzione v = (v1, . . . , vn)di Rn,
∂f
∂v(x0) =
n∑
i=1
∂f
∂xi(x0) vi , (12.3.9)
e quindi, se f e differenziabile in x0, tutte le derivate direzionali in x0 siesprimono come combinazione lineare delle derivate parziali in x0. Piu preci-samente, la proprieta (12.3.9) esprime il fatto che le derivate direzionali sonocoefficienti angolari di rette in Rn+1 passanti per (x0, f(x0)) che si trovanotutte sul piano tangente al grafico della funzione f nel punto (x0, f(x0)).
Da quanto osservato, segue che la differenziabilita di una funzione forni-sce tutte le informazioni sulle derivate direzionali in x0 utilizzando solamente

12.3 Derivate direzionali e parziali e differenziabilita 365
quelle sulle derivate parziali che, come si e visto, possono essere studiate ecalcolate utilizzando gli strumenti gia a disposizione per le funzioni di unasola variabile reale.
Pertanto, a questo punto e particolarmente utile avere a disposizione deicriteri di differenziabilita che utilizzino le stesse derivate parziali.
Teorema 12.3.6 (Teorema del differenziale totale)Siano A un sottoinsieme di Rn, x0 ∈ A un punto interno ad A ed f : A→ Runa funzione di n variabili reali tale che
i) esiste δ > 0 tale che, per ogni x ∈ Bδ(x0), f sia derivabile parzial-mente rispetto ad ogni variabile in x;
ii) le derivate parziali∂f
∂x1, . . .
∂f
∂xn,
sono continue in x0.
Allora f e differenziabile in x0.
Dimostrazione. Per brevita, si dimostra la tesi nel caso in cui f sia una funzione di duevariabili reali derivabile parzialmente rispetto ad x e rispetto ad y in ogni elemento dellasfera Bδ(x0, y0) con derivate parziali continue in (x0, y0). Bisogna allora dimostrare che
lim(x,y)→(x0,y0)
f(x, y)− f(x0, y0)− ∂f∂x (x0, y0) (x− x0)− ∂f
∂y (x0, y0) (y − y0)√
(x− x0)2 + (y − y0)2= 0 .
A tal fine, si fissi ε > 0 e, dalla continuita delle derivate parziali in (x0, y0), si considerinoδ1 > 0 e δ2 > 0 tali che
∀(x, y) ∈ Bδ1 (x0, y0) :
∣∣∣∣∂f
∂x(x, y)−
∂f
∂x(x0, y0)
∣∣∣∣ <ε
2,
∀(x, y) ∈ Bδ2 (x0, y0) :
∣∣∣∣∂f
∂y(x, y)−
∂f
∂y(x0, y0)
∣∣∣∣ <ε
2.
Si ponga ora δ0 = minδ, δ1, δ2; si passa a riconoscere che, per ogni (x, y) ∈ Bδ0 (x0, y0),si ha ∣∣∣f(x, y)− f(x0, y0)− ∂f
∂x (x0, y0) (x− x0)− ∂f∂y (x0, y0) (y − y0)
∣∣∣√
(x− x0)2 + (y − y0)2< ε
e cio completera la dimostrazione.Sia (x, y) ∈ Bδ0 (x0, y0) e si supponga x = x0 e y = y0. Denotati con I(x0, x) e
rispettivamente I(y0, y) gli intervalli aperti di estremi x0 ed x e rispettivamente y0 ed y,si considerino le funzioni ϕ1 : I(x0, x) → R e ϕ2 : I(y0, y) → R definite ponendo
∀t ∈ I(x0, x) : ϕ1(t) = f(t, y) , ∀s ∈ I(y0, y) : ϕ2(s) = f(x0, s) .
Si osservi che, per ogni t ∈ I(x0, x) si ha (t, y) ∈ Bδ0 (x0, y0) e analogamente, per ognis ∈ I(y0, y), si ha (x0, s) ∈ Bδ0 (x0, y0) e quindi ϕ1 e ϕ2 sono derivabili e si ha
∀t ∈ I(x0, x) : ϕ′1(t) =
∂f
∂x(t, y) , ∀s ∈ I(y0, y) : ϕ
′2(s) =
∂f
∂y(x0, s) .

366 Capitolo 12: Calcolo differenziale in piu variabili
Dal teorema di Lagrange (Teorema 9.2.3 per le funzioni di una variabile), esistono ξ ∈I(x0, x) ed η ∈ I(y0, y) tali che
ϕ1(x)− ϕ1(x0) = (x− x0)ϕ′1(ξ) , ϕ2(y)− ϕ1(y0) = (y − y0)ϕ
′2(η) ,
da cui
f(x, y)− f(x0, y) = (x− x0)∂f
∂x(ξ, y) , f(x0, y)− f(x0, y0) = (y − y0)
∂f
∂y(x0, η) .
Tenendo infine presente che
|x− x0|√(x− x0)2 + (y − y0)2
=
√(x− x0)2
(x− x0)2 + (y − y0)2≤ 1 ,
|y − y0|√(x− x0)2 + (y − y0)2
=
√(y − y0)2
(x− x0)2 + (y − y0)2≤ 1 ,
si ottiene∣∣∣f(x, y)− f(x0, y0)− ∂f
∂x (x0, y0) (x− x0)− ∂f∂y (x0, y0) (y − y0)
∣∣∣√
(x− x0)2 + (y − y0)2
≤
∣∣∣f(x, y)− f(x0, y)− ∂f∂x (x0, y0) (x− x0)
∣∣∣√
(x− x0)2 + (y − y0)2+
∣∣∣f(x0, y)− f(x0, y0)− ∂f∂y (x0, y0) (y − y0)
∣∣∣√
(x− x0)2 + (y − y0)2
≤
∣∣∣ ∂f∂x (ξ, y)−∂f∂x (x0, y0)
∣∣∣ |x− x0|√
(x− x0)2 + (y − y0)2+
∣∣∣ ∂f∂y (x0, η)− ∂f∂y (x0, y0)
∣∣∣ |y − y0|√
(x− x0)2 + (y − y0)2
<ε
2
|x− x0|√(x− x0)2 + (y − y0)2
+ε
2
|y − y0|√(x− x0)2 + (y − y0)2
≤ε
2+ε
2= ε .
Infine si osserva che se (x, y) = (x0, y0) la diseguaglianza precedente e ovvia, mentre se
x = x0 e y = y0 oppure x = x0 e y = y0, si puo procedere in maniera del tutto analoga
considerando solamente la funzione ϕ2 oppure ϕ1. #
Gli esempi seguenti mettono in evidenza il fatto che le condizioni fornitedal teorema precedente sono solamente sufficienti e non necessarie per as-sicurare la differenziabilita; pertanto, nei casi in cui le ipotesi del teoremaprecedente non siano soddisfatte bisogna procedere ad una verifica direttadella differenziabilita.
Esempi 12.3.7 1. Si consideri la funzione f : R2 → R definita ponendo,per ogni (x, y) ∈ R2,
f(x, y) := |xy| .
Per ogni (x0, y0) ∈ R2, si ha
limt→0
f(x0 + t, y0)− f(x0, y0)
t= |y0| lim
t→0
|x0 + t|− |x0|t

12.3 Derivate direzionali e parziali e differenziabilita 367
e quindi f e derivabile parzialmente rispetto ad x in Ax := (x0, y0) ∈R2 | x0 = 0 ∪ (0, 0) ed in ognuno di tali punti si ha
∂f
∂x(x0, y0) = |y0| ;
analogamente, essendo
limt→0
f(x0, y0 + t)− f(x0, y0)
t= |x0| lim
t→0
|y0 + t|− |y0|t
si deduce che f e derivabile parzialmente rispetto ad y in
Ay := (x0, y0) ∈ R2 | y0 = 0 ∪ (0, 0)
ed in ognuno di tali punti si ha
∂f
∂y(x0, y0) = |x0| .
Segue allora che in tutti i punti (x0, y0) ∈ R2 tali che x0 = 0 e y0 = 0si puo applicare il teorema del differenziale totale e si conclude che fe differenziabile in tali punti con df(x0, y0)(x, y) = |y0|x + |x0|y perogni (x, y) ∈ R2.
Nei punti degli assi diversi dall’origine la funzione non e differenziabilein quanto almeno uno delle derivate parziali non esiste in tali punti.
Rimane da discutere il punto (x0, y0) = (0, 0) in cui esistono e si annul-lano entrambe le derivate parziali, ma non si puo applicare il teoremadel differenziale totale in quanto le derivate parziali non sono definitein tutto un intorno del punto (0, 0). Tuttavia, usando la definizione,si riconosce subito che
lim(x,y)→(0,0)
f(x, y)− f(0, 0)
∥(x, y)− (0, 0)∥ = lim(x,y)→(0,0)
|xy|√x2 + y2
= limρ→0+
ρ2| sin θ cos θ|ρ
= 0 ,
e quindi la funzione e differenziabile in (0, 0).
2. Si consideri ora la funzione f : R2 → R definita ponendo, per ogni(x, y) ∈ R2,
f(x, y) :=
(x2 + y2) sin 1
x2+y2 , (x, y) = (0, 0) ,0 , (x, y) = (0, 0) .

368 Capitolo 12: Calcolo differenziale in piu variabili
Si riconosce facilmente che, per ogni (x0, y0) ∈ R2 " (0, 0), si ha
∂f
∂x(x0, y0) = 2x0 sin
1
x20 + y20
− 2x0
x20 + y20
cos1
x20 + y20
,
∂f
∂y(x0, y0) = 2y0 sin
1
x20 + y20
− 2y0x20 + y20
cos1
x20 + y20
,
e quindi, per il teorema del differenziale totale, f e differenziabile intutti i punti diversi dall’origine.
Nel punto (0, 0) si ha
∂f
∂x(0, 0) = lim
t→0
t2 sin(1/t2)
t= lim
t→0t sin
1
t2= 0
e analogamente∂f
∂y(0, 0) = 0; inoltre
lim(x,y)→(0,0)
f(x, y)− f(0, 0)
∥(x, y)− (0, 0)∥ = lim(x,y)→(0,0)
(x2 + y2) sin 1x2+y2
√x2 + y2
= lim(x,y)→(0,0)
√x2 + y2 sin
1
x2 + y2
= limρ→0+
ρ sin1
ρ2= 0 ,
e quindi la funzione e differenziabile in (0, 0).
12.3.4 Derivate successive e formula di Taylor
Siano A un sottoinsieme di Rn ed f : A→ R una funzione reale di n-variabilireali. Fissato i = 1, . . . , n, si puo considerare l’insieme
A′i := x0 ∈
A | f e derivabile parzialmente in x0 rispetto ad xi
e conseguentemente si puo definire la funzione g : A′i → R definita ponendo,
per ogni x ∈ A′i,
g(x) :=∂f
∂xi(x) ,
la quale viene denominata funzione derivata parziale i-esima di f .Se x0 ∈ A′
i e se j = 1, . . . , n, si dice che f e derivabile parzialmente duevolte in x0 rispetto alle variabili xi ed xj se sono soddisfatte le seguenticondizioni

12.3 Derivate direzionali e parziali e differenziabilita 369
i) x0 e interno a A′i (cioe, f e derivabile parzialmente rispetto ad xi in
un intorno di x0);
ii) la derivata parziale∂f
∂xie derivabile in x0 rispetto ad xj .
In tal caso, si pone
∂2f
∂xj ∂xi(x0) :=
∂
∂xj
(∂f
∂xi
)(x0) .
In generale, se f e derivabile parzialmente due volte in x0 rispetto allevariabili xi ed xj non e detto che lo sia rispetto alle variabili xj ed xi edanche quando cio accade non si puo assicurare l’uguaglianza
∂2f
∂xi ∂xj(x0) =
∂2f
∂xj ∂xi(x0) .
Ad esempio, la funzione f : R2 → R definita ponendo, per ogni (x, y) ∈R2,
f(x, y) := |x|+ y ,
e derivabile due volte in (0, 0) rispetto alle variabili y ed x, ma non rispettoalle variabili x ed y in quanto in (0, 0) non esiste la derivata parziale di frispetto ad x.
Il seguente risultato garantisce delle condizioni in cui l’ordine di deriva-zione puo essere invece invertito.
Teorema 12.3.8 (Teorema di Schwarz sull’invertibilita dell’ordinedi derivazione)Siano A un sottoinsieme di Rn, f : A → R una funzione reale ed x0 unpunto interno ad A. Siano i, j = 1, . . . , n e si supponga che
i) Esiste un intorno di x0 in cui esistono le derivate parziali
∂f
∂xi,
∂f
∂xj,
∂2f
∂xj ∂xi,
∂2f
∂xi ∂xj.
ii) Le derivate parziali seconde
∂2f
∂xj ∂xi,
∂2f
∂xi ∂xj.
sono continue in x0.
370 Capitolo 12: Calcolo differenziale in piu variabili
Allora si ha∂2f
∂xj ∂xi(x0) =
∂2f
∂xi ∂xj(x0) .
In maniera del tutto analoga, si possono definire le derivate di ordinesuperiore. Il significato del simbolo
∂3f
∂xk ∂xj ∂xi(x0)
e da intendersi come∂
∂xk
(∂2f
∂xj ∂xi
)(x0) ,
supposto che la derivata parziale seconda ∂2f∂xj ∂xi
esista in tutto un intorno
del punto x0.Se le derivate parziali sono continue, dal Teorema 12.3.8 di Schwarz
segue che non e importante specificare l’ordine in cui si effettuano le deriva-zioni parziali ma solamente quante volte viene effettuata la derivata parzialerispetto ad ogni variabile.
A tal fine, risulta molto utile introdurre i multi-indici, che consentonodi esprimere in maniera piu sintetica anche derivate di ordine elevato.
Un multi-indice α = (α1, . . . ,αn) e da intendersi semplicemente comeuna n-pla di numeri naturali (quindi, per ogni i = 1, . . . , n, si ha αi ∈ N).Inoltre, si definisce lunghezza del multi-indice α il seguente numero naturale
|α| := α1 + · · ·+ αn .
Se f e derivabile parzialmente |α| volte in un punto x0 e se le sue derivateparziali sono continue in x0, il simbolo
Dαf(x0) ,∂|α|f
∂xα11 · · ·xαn
n(x0)
denota la derivata parziale di f in x0 fatta α1 volte rispetto alla variabilex1, α2 volte rispetto alla variabile x2 e cosıvia fino ad αn volte rispetto allavariabile xn.
Anche per le funzioni di piu variabili e possibile enunciare un’analogodella formula di Taylor per le funzioni di una variabile reale.
Conviene tuttavia ricorrere alle potenze simboliche per esprimere taleformula nel modo piu semplice. Per potenza simbolica bisogna intendereformalmente una potenza del tipo
(ϕ1(x)
∂f
∂x1(x0) + · · ·+ ϕn(x)
∂f
∂xn(x0)
)(h)
12.3 Derivate direzionali e parziali e differenziabilita 371
dove l’ordine delle potenze e da intendere come ordine delle derivate parzialida considerare. Quindi, ad esempio,
(x∂f
∂x(x0, y0) + y
∂f
∂y(x0, y0)
)(3)
= x3 ∂3f
∂x3(x0, y0) + 3x2y
∂3f
∂x2 ∂y(x0, y0) + 3xy2
∂3f
∂x ∂y2(x0, y0) + y3
∂3f
∂y3(x0, y0) .
Con tale notazione, la formula di Taylor puo essere enunciata come segue.
Teorema 12.3.9 (Formula di Taylor per funzioni di piu variabili)Siano A un sottoinsieme aperto di Rn ed f : A → R una funzione realedotata di tutte le derivate parziali fino all’ordine p + 1 continue in A. Sex0 = ((x0)1, . . . , (x0)n) ∈ A e se x = (x1, . . . , xn) ∈ A " x0 e tale che ilsegmento S[x0, x] di estremi x0 ed x sia contenuto in A, allora esiste almenoun punto ξ ∈ A, interno al segmento S[x0, x], tale che
f(x) = f(x0) +p∑
h=1
1
h!
(∂f
∂x1(x0) (x1 − (x0)1) + . . . (12.3.10)
+∂f
∂xn(x0) (xn − (x0)n)
)(h)
+1
(p+ 1)!
(∂f
∂x1(ξ) (x1 − (x0)1) + · · ·+ ∂f
∂xn(ξ) (xn − (x0)n)
)(p+1)
= f(x0) +p∑
h=1
1
h!(∇f(x0)|x− x0)
(h) +1
(p+ 1)!(∇f(ξ)|x− x0)
(p+1) .
Se p = 0, il teorema precedente fornisce una generalizzazione del Teore-ma 9.2.3 di Lagrange al caso delle funzioni di piu variabili reali.
Teorema 12.3.10 (Teorema di Lagrange per funzioni di piu varia-bili)Siano A un sottoinsieme aperto di Rn ed f : A→ R una funzione reale dota-ta di tutte le derivate parziali continue in A. Se x0 = ((x0)1, . . . , (x0)n) ∈ Ae se x = (x1, . . . , xn) ∈ A " x0 e tale che il segmento S[x0, x] di estremix0 ed x sia contenuto in A, allora esiste almeno un punto ξ ∈ A, interno alsegmento S[x0, x], tale che
f(x)− f(x0) =∂f
∂x1(ξ) (x1 − (x0)1) + · · ·+ ∂f
∂xn(ξ) (xn − (x0)n)
= (∇f(ξ)|x− x0) . (12.3.11)

372 Capitolo 12: Calcolo differenziale in piu variabili
12.3.5 Differenziabilita delle funzioni composte
Sia A un sottoinsieme di Rn e sia m ≥ 1. Una funzione f : A → Rk vienedenominata funzione vettoriale di n-variabili reali. Per ogni k = 1, . . . ,m,si puo considerare la funzione reale fk : A → R definita ponendo, per ognix ∈ A,
fk(x) := (f(x)|ek) ,la quale viene denominata componente k-esima della funzione f (ek denotail vettore k-esimo della base canonica in Rm e (·|·) il prodotto scalare inRm). Dalle proprieta del prodotto scalare segue subito, per ogni x ∈ A,
f(x) := (f1(x), . . . , fm(x)) ,
e per mettere in evidenza questa circostanza si scrive spesso f = (f1, . . . , fm).Per le funzioni vettoriali possono essere introdotti tutti i concetti visti
per quelle reali attribuendoli ad ogni componente.Ad esempio, si fissino un sottoinsieme A di Rn ed una funzione vettoriale
f : A → Rm. Se x0 ∈ Rn e un punto di accumulazione per A e se ℓ =(ℓ1, . . . , ℓm) ∈ Rm, si dice che ℓ e il limite di f in x0 e si scrive limx→x0 f(x) =ℓ se, per ogni k = 1, . . . ,m, si ha limx→x0 fk(x) = ℓk (cio, in effetti, equivalealla seguente condizione
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ A" x0 : ∥x− x0∥ < δ ⇒ ∥f(x)− ℓ∥ < ε ).
Analogamente, se x0 ∈ A, si dira che f e continua in x0 se, per ognik = 1, . . . ,m, la componente k-esima fk di f e continua in x0 (cio equivalealla seguente condizione
∀ ε > 0 ∃ δ > 0 t.c. ∀ x ∈ A : ∥x− x0∥ < δ ⇒ ∥f(x)− f(x0)∥ < ε ).
Nello stesso modo, se x0 e interno ad A e se v ∈ Rn e una direzionedi Rn, si dice che f e derivabile in x0 secondo la direzione v se ogni fk,k = 1, . . . ,m, e derivabile in x0 secondo la direzione v e, in tal caso, si pone
∂f
∂v(x0) :=
(∂f1∂v
(x0), . . . ,∂fm∂v
(x0)
).
Se v = ei, i = 1, . . . , n, la derivata di f in x0 rispetto alla direzione ei viene
denominata derivata parziale i-esima di f in x0 e denotata con∂f
∂xi(x0);
quindi∂f
∂xi(x0) :=
(∂f1∂xi
(x0), . . . ,∂fm∂xi
(x0)
).
Infine, si dice che f e differenziabile in un punto interno x0 ∈ A seogni fk, k = 1, . . . ,m, e differenziabile in x0. In tal caso il differenziale

12.3 Derivate direzionali e parziali e differenziabilita 373
df(x0) : Rn → Rm e una funzione lineare da Rn in Rm le cui componentisono i differenziali delle funzioni fk; pertanto
df(x0) = (df1(x0), . . . , dfm(x0)) .
Si supponga che f sia differenziabile in x0. Allora, si puo considerare lamatrice di tipo (m,n)
J(f, x0) :=
(∂fi∂xj
(x0)
)
i=1,...,mj=1,...,n
(12.3.12)
=
⎛
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
∂f1∂x1
(x0)∂f1∂x2
(x0) . . .∂f1∂xn
(x0)
∂f2∂x1
(x0)∂f2∂x2
(x0) . . .∂f2∂xn
(x0)
......
. . ....
∂fm∂x1
(x0)∂fm∂x2
(x0) . . .∂fm∂xn
(x0)
⎞
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛
⎜⎜⎜⎝
∇f1(x0)∇f2(x0)
...∇fm(x0)
⎞
⎟⎟⎟⎠,
la quale viene denominata matrice jacobiana di f in x0. Se m = n, il suodeterminante det J(f, x0) viene denominato determinante jacobiano di f inx0 e denotato con
∂(f1, . . . , fn)
∂(x1, . . . , xn)(x0) .
Dall’espressione del differenziale si ricava in maniera immediata, per ognix = (x1, . . . , xn) ∈ Rn,4
df(x0)(x) = J(f, x0) · x =
⎛
⎝n∑
j=1
∂f1∂xj
(x0)xj , . . . ,n∑
j=1
∂fm∂xj
(x0)xj
⎞
⎠ .
Inoltre, vale il seguente importante risultato sulla differenziabilita dellefunzioni composte.
4L’elemento x ∈ Rn puo essere identificato all’occorrenza sia con una matrice di tipo(1, n) che di tipo (n, 1), come nel caso in esame; il prodotto tra matrici fornisce in questocaso una matrice di tipo (m, 1) che si puo identificare a sua volta con un elemento di Rm.

374 Capitolo 12: Calcolo differenziale in piu variabili
Teorema 12.3.11 (Differenziabilita delle funzioni composte)Siano A un sottoinsieme di Rn, B un sottoinsieme di Rm ed f : A → Rm
e g : B → Rp tali che f(A) ⊂ B. Sia x0 ∈ A un punto interno ad A esi supponga che f sia differenziabile in x0 e inoltre, posto y0 := f(x0), sisupponga che y0 sia un punto interno a B e che g sia differenziabile in y0.Allora, la funzione composta g f : A→ Rp e differenziabile in x0 e si ha
J(g f) = J(g, y0) · J(f, x0) . (12.3.13)
In particolare, per ogni h = 1, . . . , p e per ogni i = 1, . . . , n, risulta
∂(g f)h∂xi
(x0) =m∑
j=1
∂gh∂yj
(y0)∂fj∂xi
(x0) .
In particolare, si consideri una funzione ϕ : I → Rn definita in unintervallo aperto I e derivabile in un punto t0 ∈ I e siano A un sottoinsiemeaperto di Rn tale che ϕ(I) ⊂ A ed f : A → R una funzione differenziabilein x0 := ϕ(t0). Allora, la funzione composta f ϕ : I → R e derivabile in t0e si ha
(f ϕ)′(t0) =n∑
j=1
∂f
∂xj(x0)ϕ
′j(t0) = (∇f(x0)|ϕ′(t0)) ,
dove, per ogni j = 1, . . . , n, ϕj denota la componente j-esima della funzionevettoriale ϕ.
12.4 Punti di massimo e minimo relativo
Sia f : A → R una funzione reale definita in un sottoinsieme A di Rn. Sidice che un elemento x0 ∈ A e un punto di massimo (rispettivamente, diminimo) relativo per f se e verificata la seguente condizione
∃ δ > 0 t.c. ∀ x ∈ A ∩Bδ(x0) : f(x) ≤ f(x0) (12.4.1)
(rispettivamente, ∃ δ > 0 t.c. ∀ x ∈ A ∩Bδ(x0) : f(x0) ≤ f(x) ).
Se nella condizione precedente si suppone che valga una diseguaglian-za stretta per ogni x ∈ A ∩ Bδ(x0) " x0, allora il punto di massimo(rispettivamente, di minimo) viene denominato proprio.
Una prima condizione necessaria viene indicata dalla seguente proposi-zione.
Proposizione 12.4.1 (Prima condizione necessaria per punti di mas-simo e minimo relativo per funzioni di piu variabili)

12.4 Punti di massimo e minimo relativo 375
Siano A un sottoinsieme di Rn, f : A→ R una funzione reale ed x0 un pun-to interno ad A. Se x0 e un punto di massimo (rispettivamente, di minimo)relativo per f e se f e differenziabile in x0, allora si ha
∀ i = 1, . . . , n :∂f
∂xi(x0) = 0 . (12.4.2)
Dimostrazione. Sia i = 1, . . . , n e si consideri la funzione fx0,ei : Ix0,ei → R previstanella Definizione 12.3.1. Poiche f e differenziabile in x0, essa e derivabile parzialmenterispetto alla variabile xi in x0; pertanto, la funzione fx0,ei e derivabile in 0 e poiche0 e un punto di massimo (rispettivamente, di minimo) relativo per fx0,ei , deve esseref ′x0,ei
(0) = 0, da cui∂f
∂xi(x0) = f ′
x0,ei(0) = 0 . #
Nelle ipotesi delle Proposizione 12.4.1, si deve avere df(x0) = 0.Se f : A → R e una funzione reale definita in un sottoinsieme A di Rn,
un punto interno x0 ∈ viene denominato punto stazionario per f se f edifferenziabile in x0 e df(x0) = 0.
Dalla Proposizione 12.4.1 precedente, si ricava che i punti di massi-mo e di minimo relativo interni in cui la funzione e differenziabile sononecessariamente punti stazionari per la funzione.
Puo comunque accadere che un punto stazionario x0 non risulti nedi massimo ne di minimo relativo per f . In tal caso il punto x0 vienedenominato punto di sella per f .
La proposizione precedente suggerisce il seguente metodo per la ricercadei punti di massimo e di minimo relativo.
Osservazione 12.4.2 (Ricerca dei punti di massimo e minimo re-lativo per funzioni di piu variabili)Sia f : A→ R una funzione reale definita in un sottoinsieme A di Rn. Allorai punti di massimo e di minimo relativo per f vanno ricercati tra:
1. I punti interni stazionari per f ; tali punti si ottengono considerandoil sistema di n equazioni
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂f
∂x1(x1, . . . , x1) = 0 ,
∂f
∂x1(x1, . . . , x2) = 0 ,
...
∂f
∂x1(x1, . . . , xn) = 0 ,

376 Capitolo 12: Calcolo differenziale in piu variabili
nelle incognite x1, . . . , xn. Ogni soluzione di tale sistema richiede poiun’ulteriore indagine per verificare che si tratti effettivamente di unpunto di massimo o di minimo relativo per f oppure di un punto disella (si vedano le condizioni necessarie e sufficienti successive).
2. I punti interni in cui la funzione non e differenziabile. Tali puntirichiedono un’analisi diretta caso per caso atta a verificare se si trattao meno di punti di massimo o minimo relativo per f .
3. I punti sulla frontiera. La ricerca dei punti di massimo e di minimorelativo sulla frontiera puo essere in parte ricondotta allo studio deimassimi e minimi vincolati per f ; bisogna tuttavia tener presente cheun massimo o un minimo relativo della restrizione di f alla frontieradi A potrebbe non essere un punto di massimo o di minimo relativoper f .
Nel seguito della presente sezione si approfondisce l’analisi dei punti dimassimo e minimo relativo considerati al punto 1. dell’Osservazione 12.4.2.
Si consideri una funzione f : A→ R definita in un sottoinsieme A di Rn
e sia x0 un punto interno di A in cui f e dotata di tutte le derivate parzialiseconde continue. Allora si puo considerare la matrice jacobiana J(∇f, x0)del gradiente di f in x0. Tale matrice viene denominata matrice hessianadi f in x0 e denotata con il simbolo H(f, x0).
Piu esplicitamente, si ha
H(f, x0) := J(∇f, x0) =
(∂2f
∂xi ∂xj(x0)
)
i,j=1,...,n
(12.4.3)
=
⎛
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
∂2f
∂x21
(x0)∂2f
∂x1 ∂x2(x0) . . .
∂2f
∂x1 ∂xn(x0)
∂2f
∂x1 ∂x2(x0)
∂2f
∂x22
(x0) . . .∂2f
∂x2 ∂xn(x0)
......
. . ....
∂2f
∂x1 ∂xn(x0)
∂2f
∂x2 ∂xn(x0) . . .
∂2f
∂x2n
(x0)
⎞
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
.
Si osserva che la matrice hessiana e una matrice quadrata di ordine nsimmetrica (per il Teorema 12.3.8 di Schwarz).
Per ogni k = 1, . . . , n, il minore principale5 di H(f, x0) di ordine k vienedenominatominore hessiano di ordine k di f in x0 e denotato conHk(f, x0).
5Si ricorda che se M := (aij)i,j=1,...,n e una matrice quadrata di ordine n e sek = 1, . . . , n, viene denominato minore principale di ordine k di M il determinante Mk
della matrice Mk := (aij)i,j=1,...,k che si ottiene da M considerando le prime k righe e

12.4 Punti di massimo e minimo relativo 377
In particolare, Hn(f, x0) (cioe, il determinante della matrice hessiana di fin x0) viene denominato hessiano di f in x0 e denotato con H(f, x0).
In tutte le notazioni assunte sopra la funzione f puo essere omessa secio non da luogo ad equivoci; pertanto la matrice hessiana, i minori hessianie l’hessiano possono essere rispettivamente denotati con H(x0), Hk(x0) edH(x0).
La matrice hessiana consente di stabilire le seguenti ulteriori condizioniper massimi e minimi relativi.
Proposizione 12.4.3 (Seconda condizione necessaria per punti dimassimo e minimo relativo per funzioni di piu variabili)Siano A un sottoinsieme di Rn, f : A→ R una funzione reale ed x0 un puntointerno ad A. Si supponga che f sia derivabile parzialmente due volte in x0
rispetto a tutte le variabili; se x0 e un punto di massimo (rispettivamente,di minimo) relativo per f , allora si ha
∀ k = 1, . . . , n : (−1)kHk(f, x0) ≥ 0 , (12.4.4)
(rispettivamente, ∀ k = 1, . . . , n : Hk(f, x0) ≥ 0 ).
Teorema 12.4.4 (Condizione sufficiente per punti di massimo e mi-nimo relativo per funzioni di piu variabili)Siano A un sottoinsieme di Rn, f : A→ R una funzione reale, x0 un puntointerno ad A e si supponga che f sia derivabile parzialmente due volte inx0 rispetto a tutte le variabili.
Se sono soddisfatte le seguenti condizioni
i) per ogni i = 1, . . . , n:∂f
∂xi(x0) = 0,
ii) per ogni k = 1, . . . , n: (−1)kHk(f, x0) > 0
(rispettivamente, per ogni k = 1, . . . , n: Hk(f, x0) > 0),
allora x0 e un punto di massimo (rispettivamente, di minimo) relativoproprio per f .
Osservazione 12.4.5 Si supponga che A sia un sottoinsieme di R2 e chef : A→ R sia una funzione di 2 variabili reali dotata delle derivate parzialiseconde in un punto stazionario interno (x0, y0) di A. Tenendo conto delle
le prime k colonne; quindi
Mk :=
∣∣∣∣∣∣∣
a11 . . . a1k...
. . ....
ak1 . . . akk
∣∣∣∣∣∣∣.
378 Capitolo 12: Calcolo differenziale in piu variabili
condizioni necessarie e di quelle sufficienti ottenute nei risultati precedentisi ha quanto segue
1. Se H(x0, y0) > 0, il punto e necessariamente di massimo oppure diminimo relativo proprio per f . Infatti, si osserva che le derivate par-
ziali∂2f
∂x2(x0) e
∂2f
∂y2(x0) devono essere necessariamente diverse da 0
ed avere lo stesso segno altrimenti si avrebbe
H(x0, y0) =∂2f
∂x2(x0)
∂2f
∂y2(x0)−
(∂2f
∂x ∂y(x0)
)2
≤ 0 .
Pertanto, tenendo conto del Teorema 12.4.4, si ha in questo caso che
(x0, y0) e un punto di massimo relativo proprio per f se∂2f
∂x2(x0) < 0
(o equivalentemente∂2f
∂y2(x0) < 0) ed e un punto di minimo relativo
proprio per f se∂2f
∂x2(x0) > 0 (o equivalentemente
∂2f
∂y2(x0) > 0).
2. Se H(x0, y0) = 0, e soddisfatta in ogni caso la condizione necessariafornita dalla Proposizione 12.4.3 ma non la condizione sufficiente delTeorema 12.4.4. Quindi in questo caso non si puo dire nulla e bisognaricorrere ad altri strumenti per determinare se (x0, y0) e oppure menoun punto di massimo o di minimo relativo per f .
3. Se H(x0, y0) < 0, la condizione necessaria fornita dalla Proposizione12.4.3 non e soddisfatta e quindi (x0, y0) non puo essere ne un puntodi massimo ne un punto di minimo relativo per f . Quindi (x0, y0) eun punto di sella per f .
12.5 Massimo e minimo assoluto
Una volta determinati i punti di massimo e minimo relativo puo esserediscussa anche l’eventuale esistenza del massimo e del minimo assoluto dellafunzione. Se la funzione in esame e definita e continua in un insieme chiuso elimitato essa e sicuramente dotata di minimo e di massimo (assoluto) per ilTeorema 12.2.3 di Weierstrass, e in tal caso il massimo ed il minimo assolutopossono essere ottenuti confrontando i valori della funzione in tutti i puntidi massimo o di minimo relativo.
Nei casi in cui non e possibile garantire l’esistenza del massimo e delminimo assoluto, si procede come segue:

12.5 Massimo e minimo assoluto 379
Osservazione 12.5.1 (Ricerca dei punti di massimo e minimo as-soluto per funzioni di piu variabili)Sia f : A→ R una funzione reale definita in un sottoinsieme A di Rn. Allorasi procede come segue:
1. Si determinano i punti di massimo e di minimo relativo per f comeprevisto nell’Osservazione 12.4.2 ed in ognuno di tali punti si calcola ilvalore della funzione. Conviene tener presente che in questo caso none necessario stabilire se i punti ottenuti dall’Osservazione 12.4.2 sianoeffettivamente punti di massimo o minimo relativo per f in quantosi e interessati solamente al confronto dei valori della funzione in talipunti. In particolare, non e necessario condurre l’analisi sui minoredella matrice hessiana nei punti stazionari interni.
2. Potrebbe a questo punto accadere che non esiste il piu grande (o il piupiccolo) valore della funzione nei punti cosıottenuti6 e in tal caso sipotra concludere che il massimo assoluto (o il minimo assoluto) dellafunzione non esiste in quanto i punti di massimo o minimo assolutosono necessariamente anche punti di massimo o minimo relativo.
Se, invece, esiste il valore piu grande Mf ∈ R (oppure piu piccolomf ∈ R) nei punti ottenuti, esso potrebbe essere il massimo (oppureil minimo) assoluto della funzione ed i punti in cui esso viene assuntopotrebbero cosıessere i punti di massimo (o minimo) assoluto dellafunzione.
3. Si confronta Mf (oppure mf ) con il comportamento della funzionenei punti in cui essa e definita ma non e continua oppure i punti diaccumulazione in cui la funzione non e definita. Tale comportamentoviene studiato considerando il limite della funzione oppure, nel casoin cui esso non esista, considerando il limite minimo e quello massi-mo. Se in uno di tali punti il valore del limite o del limite massimo estrettamente maggiore di Mf , si conclude che f non e dotata di mas-simo assoluto, mentre se accade che in ognuno di tali punti il limiteo il limite massimo e minore o uguale di Mf , allora Mf e il massimoassoluto della funzione. Analogamente, se in uno dei punti consideratiil valore del limite o del limite minimo e strettamente minore di mf ,si conclude che f non e dotata di minimo assoluto, mentre se accadeche in ognuno di tali punti il limite o il limite minimo e maggiore ouguale di mf , allora mf e il minimo assoluto della funzione.
6Ad esempio, basta considerare la funzione f : R2 → R definita ponendo, per ogni(x, y) ∈ R2, f(x, y) := x + sinx − y + sin y. I punti stazionari sono (π + 2hπ, 2kπ) conh, k ∈ Z e in tali punti la funzioni assume il valore f(π + 2hπ, 2kπ) = π + 2(h − k)π.L’insieme di tali valori costituisce un insieme non limitato superiormente ne inferiormente.

380 Capitolo 12: Calcolo differenziale in piu variabili
12.6 Massimi e minimi vincolati
Sia assegnata una funzione f : A→ R definita in un sottoinsieme A di Rn.Si vogliono ora studiare i massimi ed i minimi relativi di f non in tuttol’insieme A ma in un particolare sottoinsieme di A i cui punti soddisfanol’equazione di un vincolo, ad esempio F (x) = 0 con F : B → R e B ⊂ Rn.Si e pertanto interessati a determinare i massimi e minimi relativi di f|Vdove V := A ∩ x ∈ B | F (x) = 0. Tali punti vengono denominati dimassimo e minimo vincolato per f .
Nel caso in cui sia possibile esplicitare una delle variabili dell’equa-zione F (x1, . . . , xn) = 0 in funzione delle altre (cioe risolvere l’equazionerispetto ad una delle variabili si ottiene F (x1, . . . , xn) = 0 se e solo sexi = ϕ(x1, . . . , xi−1, xi+1, . . . , xn) e quindi il problema posto equivale adeterminare massimi e minimi relativi della funzione di n− 1 variabili
g(x1, . . . , xi−1, xi+1, . . . , xn)
= f(x1, . . . , xi−1,ϕ(x1, . . . , xi−1, xi+1, . . . , xn), xi+1, . . . , xn) .
Ad esempio, si supponga di voler studiare i massimi e minimi vincolatidella funzione
f(x, y) := x(x− y2) , (x, y) ∈ R2 ,
sottoposti al vincolo F (x, y) := x2 − y2.Dall’equazione F (x, y) = 0 si ottiene y = ±x e quindi basta studiare
massimi e minimi relativi delle funzioni di una variabile
g+(x) := f(x, x) = x(x−x2) = x2(1−x) , g−(x) := f(x,−x) = x2(1−x) ;
pur essendo g+ = g−, esse forniscono punti distinti di massimo e di minimorelativo per f . Infatti, la funzione g+ ammette un massimo relativo in 0 edun minimo relativo in 2/3; segue che f ha un massimo vincolato in (0, 0) edue minimi vincolati nei punti (2/3,±2/3), relativi alle funzioni g+ e g−.
Si supponga ora che non sia possibile scrivere l’equazione del vincolo informa esplicita. In questo caso si puo ricorrere al metodo dei moltiplicatoridi Lagrange.
Tale metodo consiste nel considerare una funzione ausiliaria che dipendeda n + 1 variabili come di seguito specificato. Si supponga assegnata unafunzione f : A → R definita in un sottoinsieme A di Rn e l’equazione diun vincolo F (x) = 0 con F : B → R e B ⊂ Rn. Si consideri la funzioneg : (A ∩ B) × R → R definita ponendo, per ogni (x,λ) = (x1, . . . , xn,λ) ∈(A ∩B)× R,
g(x,λ) := f(x) + λF (x) .

12.6 Massimi e minimi vincolati 381
Si puo dimostrare che se (x0,λ0) ∈ (A ∩ B) × R e un punto di massimo(oppure di minimo) relativo per g, allora x0 e un punto di massimo (oppuredi minimo) vincolato per f .
Conseguentemente, per determinare i punti di massimo e di minimovincolato, si possono studiare i punti stazionari di g che sono forniti dallesoluzioni del sistema di n+ 1 equazioni in n+ 1 incognite
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂g
∂x1(x1, . . . , xn,λ) =
∂f
∂x1(x1, . . . , xn) + λ
∂F
∂x1(x1, . . . , xn) = 0 ,
∂g
∂x2(x1, . . . , xn,λ) =
∂f
∂x2(x1, . . . , xn) + λ
∂F
∂x2(x1, . . . , xn) = 0 ,
...
∂g
∂xn(x1, . . . , xn,λ) =
∂f
∂xn(x1, . . . , xn) + λ
∂F
∂xn(x1, . . . , xn) = 0 ,
∂g
∂λ(x1, . . . , xn,λ) = F (x1, . . . , xn) = 0 .
Si osservi che l’ultima equazione del sistema precedente fornisce propriol’equazione del vincolo.
Se vi sono piu vincoli, la funzione F puo essere supposta vettorialea valori in Rm con m < n. In questo caso il metodo dei moltiplicatoridi Lagrange e analogo al caso precedente aggiungendo tuttavia una nuovavariabile per ogni componente di F .
Precisamente, si supponga assegnata una funzione f : A→ R definita inun sottoinsieme A di Rn e l’equazione di un vincolo F (x) = 0 con F : B →Rm con B ⊂ Rn ed m < n. Si consideri la funzione g : (A ∩ B)× Rm → Rdefinita ponendo, per ogni (x,λ) = (x1, . . . , xn,λ1, . . . ,λm) ∈ (A∩B)×Rm,
g(x,λ) := f(x) + λ1 F (x) + · · ·+ λm Fm(x) .
Anche in questo caso si puo dimostrare che se (x0,λ0) ∈ (A∩B)×Rm e unpunto di massimo (oppure di minimo) relativo per g, allora x0 e un puntodi massimo (oppure di minimo) vincolato per f .
I punti stazionari di g sono forniti in questo caso dalle soluzioni del
382 Capitolo 12: Calcolo differenziale in piu variabili
sistema di n+m equazioni in n+m incognite
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂g
∂x1(x1, . . . , xn,λ1, . . . ,λm) =
∂f
∂x1(x1, . . . , xn) + λ1
∂F1
∂x1(x1, . . . , xn)
+ · · ·+ λm∂Fm
∂x1(x1, . . . , xn) = 0 ,
∂g
∂x2(x1, . . . , xn,λ1, . . . ,λm) =
∂f
∂x2(x1, . . . , xn) + λ1
∂F1
∂x2(x1, . . . , xn)
+ · · ·+ λm∂Fm
∂x2(x1, . . . , xn) = 0 ,
...
∂g
∂xn(x1, . . . , xn,λ1, . . . ,λm) =
∂f
∂xn(x1, . . . , xn) + λ1
∂F1
∂xn(x1, . . . , xn)
+ · · ·+ λm∂Fm
∂xn(x1, . . . , xn) = 0 ,
∂g
∂λ1(x1, . . . , xn,λ1, . . . ,λm) = F1(x1, . . . , xn) = 0 ,
∂g
∂λ2(x1, . . . , xn,λ1, . . . ,λm) = F2(x1, . . . , xn) = 0 ,
...
∂g
∂λm(x1, . . . , xn,λ1, . . . ,λm) = Fm(x1, . . . , xn) = 0 .
Si osservi che le ultime m equazioni del sistema precedente forniscono pro-prio l’equazione del vincolo F (x) = 0.
Capitolo 13
L’integrale di Riemann inRn
13.1 Cenni sulla teoria della misura di Peano-Jordan in Rn
La teoria della misura di Peano-Jordan, sulla quale si fonda quella dell’in-tegrazione di Riemann, ha il vantaggio di essere basata su semplici pro-prieta geometriche ed inoltre la teoria dell’integrazione da essa dedotta sarasufficiente per il tipo di funzioni di cui si vuole considerare l’integrale.
Si parte dal caso elementare della misura di un intervallo. Sia I = [a, b]un intervallo di estremi a e b in Rn, con a = (a1, . . . , an) e b = (b1, . . . , bn)tali che ai ≤ bi per ogni i = 1, . . . , n.
Allora, tenendo conto dell’ovvio significato geometrico nei casi n = 2 edn = 3, risulta naturale porre in generale
m(I) :=n∏
i=1
(bi − ai) .
Poiche la misura e nulla se i due punti hanno una delle coordinate uguali, talemisura rimane immutata se si considera un intervallo aperto (o semiaperto)anziche un intervallo chiuso.
Si passa ora a considerare la misura di un plurintervallo di Rn. Innan-zitutto si precisa che un plurintervallo di Rn e unione di un numero finitodi intervalli di Rn. Quindi P ⊂ Rn e un plurintervallo di Rn se esistono un

384 Capitolo 13: L’integrale di Riemann in Rn
numero finito di intervalli I1, . . . , Im tali che
P =m⋃
j=1
Ij .
Per brevita, l’insieme dei plurintervalli di Rn verra denotato nel seguitocon il simbolo P.
Se, inoltre, e possibile scegliere gli intervalli I1, . . . , Im tutti chiusi (ri-spettivamente, aperti oppure semiaperti) allora anche il plurintervallo vienedenominato chiuso (rispettivamente (aperto, semiaperto).
Una proprieta importante dei plurintervalli e messa in evidenza dellaseguente proposizione.
Proposizione 13.1.1 Sia P un plurintervallo di Rn. Allora esistono unnumero finito I1, . . . , Im di intervalli di Rn tali che
1. per ogni j = 1, . . . ,m:Ij = ∅;
2. per ogni j, k = 1, . . . ,m, j = k:Ij ∩
Ik = ∅;
3. P =m⋃
j=1
Ij.
Inoltre, se P e un plurintervallo chiuso (rispettivamente, semiaperto), alloragli intervalli I1, . . . , Im possono essere considerati anch’essi chiusi (rispet-tivamente, semiaperti).
Quindi, ogni plurintervallo P si puo esprimere come unione di un numerofinito I1, . . . , Im di intervalli non vuoti e con interni a due a due disgiunti.Tale proprieta consente anche per i plurintervalli di definire la misura inmaniera naturale, ponendo
m(P ) :=m∑
j=1
m(Ij) .
A questo punto si vuole studiare la misurabilita di un arbitrario sottoin-sieme A di Rn.
Si supponga in una prima fase che A sia limitato e dotato di puntiinterni. Tali ipotesi consentono rispettivamente di affermare che esistonosia un intervallo che contiene A sia un intervallo contenuto in A e quindi iseguenti insiemi sono non vuoti:
Pe(A) := P ∈ P | A ⊂ P ,
Pi(A) := P ∈ P | P ⊂ A .

13.1 Cenni sulla teoria della misura di Peano-Jordan in Rn 385
Risulta ovviamente
∀ P1 ∈ Pi(A), ∀ P2 ∈ Pe(A) : m(P1) ≤ m(P2) ,
e quindi l’insieme delle misure dei plurintervalli contenuti in A e limitatosuperiormente e quello delle misure dei plurintervalli contenenti A e limitatoinferiormente. Ha senso quindi porre
mi(A) := supP1∈Pi(A)
m(P1) , me(A) := infP2∈Pe(A)
m(P2) .
Il numero mi(A) viene denominato misura interna secondo Peano-Jordandi A, mentre il numero me(A) viene denominato misura esterna secondoPeano-Jordan di A. Dalle definizioni assunte, segue subito
mi(A) ≤ me(A) .
Nel caso in cui valga l’uguaglianza mi(A) = me(A), l’insieme A viene dettomisurabile secondo Peano-Jordan e in tal caso la sua misura m(A) vienedefinita ponendo
m(A) = mi(A) = me(A) .
Ad esempio, si consideri l’insieme
B := x = (x1, . . . , xn) ∈ [0, 1]n | x1, . . . , xn ∈ Q
e si definisca l’insieme A = B ∪ ([1, 2]× [0, 1]n−1). Ovviamente, l’intervalloI1 := [1, 2]× [0, 1]n−1 ha misura 1, mentre l’intervallo I2 := [0, 2]× [0, 1]n−1
ha misura 2 ed inoltre ogni plurintervallo P1 ∈ Pi(A) e contenuto in I1mentre ogni intervallo P2 ∈ Pe(A) contiene I2. Conseguentemente
mi(A) = m(I1) = 1 , me(A) = m(I2) = 2
e quindi A non e misurabile secondo Peano-Jordan.
Come ulteriore esempio, si consideri una funzione f : [a, b]→ R positivae limitata in un intervallo chiuso e limitato [a, b]. Si ricorda che il trapezoidedi f e il seguente sottoinsieme
T (f) := (x, y) ∈ R2 | x ∈ [a, b] , 0 ≤ y ≤ f(x)
di R2 (vedasi la Sezione 10.1.3 a pag. 278).Fissata una suddivisione P ∈ Σ([a, b]) di [a, b], la somma superiore
S(f, P ) di f relativa a P rappresenta l’area di un plurintervallo contenenteT (f), mentre la somma inferiore s(f, P ) di f relativa a P rappresenta l’areadi un plurintervallo contenuto in T (f).

386 Capitolo 13: L’integrale di Riemann in Rn
Allora si ha
∫ b
af(x) dx = inf
P∈Σ([a,b])S(f, P ) = inf
P∈Pe(T (f))m(P ) = me(T (f))
e analogamente
∫ b
af(x) dx = sup
P∈Σ([a,b])s(f, P ) = sup
P∈Pi(T (f))m(P ) = mi(T (f)).
Si deduce, come annunciato nella Sezione 10.1.3, che f e integrabile secondoRiemann se e solo se il trapezoide T (f) e un sottoinsieme di R2 misurabilesecondo Peano-Jordan e, in tal caso, si ha anche
∫ b
af(x) dx = m(T (f)) .
Un’utile caratterizzazione degli insiemi misurabili viene fornita dallaproposizione seguente.
Proposizione 13.1.2 (Criterio di misurabilita mediante plurinter-valli)Sia A ⊂ Rn limitato e dotato di punti interni. Allora le seguenti proposizionisono equivalenti:
a) A e misurabile secondo Peano-Jordan;
b) ∀ ε > 0 ∃ P1 ∈ Pi(A), ∃ P2 ∈ Pe(A) t.c. m(P2)−m(P1) < ε;
b) ∀ ε > 0 ∃ P ∈ P t.c. Fr(A) ⊂ P , m(P ) < ε.
Si supponga ora che A ⊂ Rn sia limitato ma privo di punti interni.In tal caso, esso viene definito misurabile se la sua misura esterna secondoPeano-Jordan e nulla; in tal caso, si ponem(A) = 0. Quindi un sottoinsiemelimitato A di Rn privo di punti interni e misurabile se e solo se verifica laseguente condizione
∀ ε > 0 ∃ P ∈ P t.c. A ⊂ P , m(P ) < ε .
Dalla caratterizzazione fornita nella Proposizione 13.1.2 si ricava che unsottoinsieme A ⊂ Rn limitato e dotato di punti interni e misurabile se e solose la sua frontiera e misurabile ed ha misura nulla.
Si supponga infine che A sia un sottoinsieme non limitato di Rn. si diceche A e misurabile secondo Peano-Jordan se sono soddisfatte le seguenticondizioni:

13.1 Cenni sulla teoria della misura di Peano-Jordan in Rn 387
i) Per ogni r > 0: A ∩Br(0) e misurabile;
ii) supr>0
m(A ∩Br(0)) < +∞.
In tal caso, si pone
m(A) := supr>0
m(A ∩Br(0)) (= limr→+∞
m(A ∩Br(0))) .
Ovviamente, anziche le sfere Br(0) con centro l’origine si puo considerareuna qualsiasi famiglia crescente (Ar)r>0 di sottoinsiemi misurabili di Rn lacui unione sia uguale a tutto Rn.
Ad esempio, si consideri il sottoinsieme di R2 (vedasi la Figura 13.1)
Ap :=
(x, y) ∈ R2 | x ≥ 1 , 0 ≤ y ≤ 1
xp
.
1x
1
y
0 Ap
Figura 13.1: Esempio di insieme misurabile illimitato.
Per ogni r > 1, l’insieme A ∩ [−r, r]2 risulta ovviamente misurabile einoltre
m(A ∩ [−r, r]2) =∫ r
1
1
xpdx =
⎧⎪⎨
⎪⎩
r1−p − 1
1− p, p = 1 ,
log r , p = 1 .
Poiche
limr→+∞
m(A ∩ [−r, r]n) =
⎧⎪⎨
⎪⎩
1
p− 1, p > 1 ,
+∞ , p ≤ 1 ,
si conclude che Ap e misurabile se e solo se p > 1 e, in tal caso, si ham(Ap) = 1/(p− 1).

388 Capitolo 13: L’integrale di Riemann in Rn
13.2 Cenni sull’integrale di Riemann in Rn
Sia A un sottoinsieme misurabile e limitato di Rn. Si definisce suddivisionedi A una successione finita P = (Ai)i=1,...,m di sottoinsiemi di Rn tali che
1. per ogni i = 1, . . . ,m: Ai e non vuoto e misurabile;
2. per ogni i, j = 1, . . . ,m, i = j:Ai ∩
Aj = ∅ (i sottoinsiemi Ai,
i = 1, . . . ,m, hanno a due a due interni disgiunti);
3. A =m⋃
i=1
Ai.
Inoltre, il numero|P | := max
i=1,...,mm(Ai)
viene denominato ampiezza della suddivisione P .L’insieme di tutte le suddivisioni di A viene denotato con Σ(A).
Si riconosce facilmente che, fissato ε > 0, esiste sempre una suddivisionedi ampiezza minore o uguale ad ε.
Infatti, posto δ := ε1/n, per ogni r := (r1, . . . , rn) ∈ Zn, si puo conside-rare l’intervallo
Ir :=n∏
i=1
[ri, ri + δ] .
Poiche A e limitato, solamente un numero finito di tali intervalli hannointersezione non vuota con A; denotati con I1, . . . , Im tali intervalli e posto,per ogni j = 1, . . . ,m, Aj := Ij ∩A, si verifica facilmente che la successionefinita P = (Ai)i=1,...,m e una suddivisione di A. Inoltre, per ogni j =1, . . . ,m, m(Aj) ≤ m(Ij) = δn = ε da cui |P | ≤ ε.
Sia A un sottoinsieme misurabile e limitato di Rn e si consideri unafunzione limitata f : A→ R.
Se P = (Ai)i=1,...,m e una suddivisione di A, posto
∀ i = 1, . . . ,m : Mi := supx∈Ai
f(x) , mi := infx∈Ai
f(x) ,
si possono definire la somma superiore S(f, P ) e la somma inferiore s(f, P )di f relativa a P nel modo seguente
S(f, P ) :=m∑
i=1
Mi m(Ai) , s(f, P ) :=m∑
i=1
mi m(Ai) .

13.2 Cenni sull’integrale di Riemann in Rn 389
Comunque si considerino due suddivisioni P1, P2 ∈ Σ(A), risulta
s(f, P1) ≤ S(f, P2) .
Pertanto il sottoinsieme di R
S(f) := S(f, P2) | P2 ∈ Σ(A)
costituito da tutte le somme superiori di f e limitato inferiormente; l’estremoinferiore di tale sottoinsieme viene denominato integrale superiore di f in Ae denotato con uno dei simboli
∫
Af ,
∫
Af(x) dx ,
∫· · ·∫
Af(x1, . . . , xn) dx1 · · · dxn .
Pertanto, l’integrale superiore di f e l’estremo inferiore delle somme supe-riori di f e soddisfa la seguente condizione, per ogni P1 ∈ Σ(A)
s(f, P1) ≤∫
Af .
Da cio segue che il sottoinsieme di R
s(f) := s(f, P ) | P ∈ Σ(A)
costituito da tutte le somme inferiori di f e limitato superiormente ed il suoestremo superiore viene denominato integrale inferiore di f in A e denotatocon uno dei simboli
∫
Af ,
∫
Af(x) dx ,
∫· · ·∫
Af(x1, . . . , xn) dx1 · · · dxn .
Quindi l’integrale inferiore di f e l’estremo superiore delle somme inferioridi f ; ma l’integrale superiore e un maggiorante delle somme inferiori e dacio si ottiene ∫
Af ≤
∫
Af .
In generale, non ci si puo aspettare che nella formula precedente valgaun’uguaglianza; per riconoscere cio si puo ricorrere ad esempi analoghi allafunzione di Dirichlet considerata in una variabile, definendo ad esempio lafunzione d : [0, 1]n → R ponendo, per ogni x = (x1, . . . , xn) ∈ [0, 1]n,
d(x) :=
1 , ∀ i = 1, . . . , n : xi ∈ [0, 1] ∩Q ,0 , ∃ i = 1, . . . , n t.c. xi ∈ [0, 1] ∩ (R"Q) .

390 Capitolo 13: L’integrale di Riemann in Rn
Si riconosce allora che, per ogni suddivisione P ∈ Σ(A), risulta
S(d, P ) = 1 , s(d, P ) = 0 ,
e conseguentemente ∫
Ad = 0 ,
∫
Ad = 1 .
Definizione 13.2.1 Sia A un sottoinsieme misurabile e limitato di Rn esia f : A → R una funzione limitata. Si dice che f e integrabile secondoRiemann in A se l’integrale superiore di f coincide con l’integrale inferioredi f ∫
Af =
∫
Af .
In tal caso il valore comune dell’integrale superiore ed inferiore di f vienedenominato integrale (multiplo) di f e denotato con uno dei seguenti simboli
∫
Af ,
∫
Af(x) dx ,
∫· · ·∫
Af(x1, . . . , xn) dx1 · · · dxn .
L’insieme delle funzioni f : A → R integrabili secondo Riemann in Aviene denotato con il simbolo R(A).
La definizione adottata generalizza in modo naturale quella gia vista perle funzioni di una variabile.
Sussiste anche un criterio di integrabilita mediante suddivisioni del tuttoanalogo al caso di funzioni di una sola variabile.
Proposizione 13.2.2 (Criterio di integrabilita mediante suddivisio-ni)Sia A un sottoinsieme misurabile e limitato di Rn e sia f : A → R unafunzione limitata. Allora, le seguenti proposizioni sono equivalenti:
a) f e integrabile secondo Riemann in A.
b) ∀ ε > 0 ∃ P1, P2 ∈ Σ(A) t.c. S(f, P2)− s(f, P1) < ε.
c) ∀ ε > 0 ∃ P ∈ Σ(A) t.c. S(f, P )− s(f, P ) < ε.
Il criterio di integrabilita precedente e sufficiente per stabilire l’integra-bilita di alcune classi di funzioni, tra cui quelle continue.
Teorema 13.2.3 (Integrabilita delle funzioni continue)Sia A un sottoinsieme misurabile e limitato di Rn e sia f : A → R unafunzione continua e limitata.1 Allora f e integrabile secondo Riemann inA.
1L’ipotesi che f sia limitata e automaticamente soddisfatta, per il teorema diWeierstrass, se si suppone che A sia chiuso.

13.2 Cenni sull’integrale di Riemann in Rn 391
Anche per gli integrali multipli si puo fornire un’interpretazione geome-trica.
Sia A un sottoinsieme misurabile e limitato di Rn e sia f : A → R unafunzione limitata e positiva.
Si denomina trapezoide relativo ad f di base A e lo si denota con T (f)il seguente sottoinsieme di Rn+1
T (f) := (x, y) ∈ Rn × R | x ∈ A , 0 ≤ y ≤ f(x) .
Dal criterio di integrabilita mediante suddivisioni (Proposizione 13.2.2)e dal criterio di misurabilita mediante plurintervalli (Proposizione 13.1.2)segue che f e integrabile secondo Riemann in A se e solo se T (f) e unsottoinsieme misurabile di Rn+1 e, in tal caso, si ha
∫
Af = m(T (f)) .
Se f : A→ R e negativa, si puo applicare quanto sopra alla funzione −fe riconoscere che f e integrabile se e solo se il trapezoide T (f) := (x, y) ∈Rn × R | x ∈ A , f(x) ≤ y ≤ 0 e un sottoinsieme misurabile di Rn+1; intal caso, si ha ∫
Af = −m(T (f)) .
Nel caso in cui f non abbia segno costante, si puo applicare quanto sopraalla parte positiva f+ := supf, 0 ed alla parte negativa f− := inff, 0 dif .
Vista la definizione adottata, l’integrale multiplo soddisfa proprieta ana-loghe a quelle viste nella Proposizione 10.1.6 e nel Teorema 10.1.7; perbrevita si omette di elencare tali proprieta.
Per quanto riguarda invece il calcolo degli integrali multipli non si puoricorrere a metodi analoghi a quelli utilizzati per le funzioni di una variabilein quanto non vi e un analogo del concetto di primitiva per una funzione dipiu variabili.
Gli strumenti maggiormente utilizzati sono l’integrazione su domini nor-mali ed il cambiamento di variabili.
13.2.1 Integrazione su domini normali
In maniera preliminare si considera separatamente il caso di 2 variabili. SiaA un sottoinsieme di R2. Si dice che A e un dominio normale rispettoall’asse x (oppure secondo l’asse y) se esistono a, b ∈ R con a < b e duefunzioni continue α,β : [a, b]→ R tali che α ≤ β e
A := (x, y) ∈ R2 | x ∈ [a, b] , α(x) ≤ y ≤ β(x) .
392 Capitolo 13: L’integrale di Riemann in Rn
Un dominio normale rispetto all’asse x e sicuramente chiuso, limitato emisurabile ed inoltre la sua misura e data da
m(A) =
∫ b
a(β(x)− α(x)) dx .
Se f : A → R e una funzione continua sul dominio normale A rispettoall’asse x vale la seguente formula di riduzione degli integrali doppi
∫∫
Af(x, y) dx dy =
∫ b
a
(∫ β(x)
α(x)f(x, y) dy
)dx . (13.2.1)
L’integrale a secondo membro viene spesso denotato con
∫ b
adx
∫ β(x)
α(x)f(x, y) dy
e quindi la formula di riduzione precedente viene scritta come segue
∫∫
Af(x, y) dx dy =
∫ b
adx
∫ β(x)
α(x)f(x, y) dy .
In maniera del tutto analoga si puo considerare una formula di riduzioneper domini normali rispetto all’asse y.
Si dice che un sottoinsieme A di R2 e un dominio normale rispetto all’as-se y (oppure secondo l’asse x) se esistono c, d ∈ R con c < d e due funzionicontinue γ, δ : [c, d]→ R tali che γ ≤ δ e
A := (x, y) ∈ R2 | y ∈ [c, d] , γ(y) ≤ x ≤ δ(y) .
Un dominio normale rispetto all’asse y e chiuso, limitato e misurabile edinoltre
m(A) =
∫ d
c(δ(y)− γ(y)) dy .
Se f : A → R e una funzione continua sul dominio normale A rispettoall’asse y vale la seguente formula di riduzione degli integrali doppi
∫∫
Af(x, y) dx dy =
∫ d
c
(∫ δ(y)
γ(y)f(x, y) dx
)dy . (13.2.2)
Anche in questo caso l’integrale a secondo membro viene denotato con
∫ d
cdy
∫ β(y)
α(y)f(x, y) dx
13.2 Cenni sull’integrale di Riemann in Rn 393
e quindi la formula di riduzione diventa
∫∫
Af(x, y) dx dy =
∫ d
cdy
∫ β(y)
α(y)f(x, y) dx .
Si considera ora il caso generale.Sia A un sottoinsieme di Rn e sia j = 1, . . . , n fissato; si dice che A e
normale rispetto al piano x1, . . . , xj−1, xj+1, . . . , xn individuato dai vettorie1, . . . , ej−1, ej+1, . . . , en della base canonica (oppure secondo l’asse xj) seesistono un sottoinsieme chiuso, limitato e misurabile B ⊂ Rn−1 e duefunzioni continue α,β : B → R tali che α ≤ β e inoltre, posto per brevitaxj = (x1, . . . , xj−1, xj+1, . . . , xn) ∈ Rn−1 per ogni x = (x1, . . . , xn) ∈ Rn,
A = x = (x1, . . . , xn) ∈ Rn | xj ∈ B , α(xj) ≤ xj ≤ β(xj) .
Se A e un dominio normale secondo l’asse xj , allora A e chiuso, limitatoe misurabile ed inoltre
m(A) =
∫· · ·∫
B(β(xj)− α(xj)) dx1 · · · dxj−1 dxj+1 · · · dxn .
Se f : A → R e una funzione continua sul dominio normale A secondol’asse xj vale la seguente formula di riduzione degli integrali multipli
∫· · ·∫
Af(x1, . . . , xn) dx1 · · · dxn (13.2.3)
=
∫· · ·∫
B
(∫ β(xj)
α(xj)f(x1, . . . , xn) dxj
)dx1 · · · dxj−1 dxj+1 · · · dxn .
Anche in questo caso l’integrale a secondo membro viene denotato con
∫· · ·∫
Bdx1 · · · dxj−1 dxj+1 · · · dxn
∫ β(xj)
α(xj)f(x1, . . . , xn) dxj
e quindi la formula di riduzione diventa∫
· · ·∫
Af(x1, . . . , xn) dx1 · · · dxn
=
∫· · ·∫
Bdx1 · · · dxj−1 dxj+1 · · · dxn
∫ β(xj)
α(xj)f(x1, . . . , xn) dxj
Esempi 13.2.4 1. Si consideri l’integrale doppio∫∫
Ax sin y dx dy ,

394 Capitolo 13: L’integrale di Riemann in Rn
con A := (x, y) ∈ R2 | 0 ≤ x ≤ 1 , x2 ≤ y ≤ x. Allora, dalle formuledi riduzione per gli integrali doppi si ottiene∫∫
Ax sin y dx dy =
∫ 1
0dx
∫ x
x2
x sin y dy
=
∫ 1
0dx [−x cos y]xx2
=
∫ 1
0(−x cosx+ x cosx2) dx
=
∫ 1
0−x cosx dx+
1
2
∫ 1
02x cosx2 dx
= [−x sinx]10 +∫ 1
0sinx dx+
1
2
[sinx2
]10
= sin 1− cos 1 + 1 +1
2sin 1 =
3
2sin 1− cos 1 + 1 .
2. Si consideri l’integrale triplo∫∫∫
Axyz dx dy dz ,
dove A e il cilindro che ha come base il cerchio unitario C con centrol’origine nel piano xy ed altezza l’intervallo [0, 1] sull’asse z. Quindi
A := (x, y, z) ∈ R3 | x2 + y2 ≤ 1 , 0 ≤ z ≤ 1
ed inoltre, denotata dalle formule di riduzione per gli integrali multiplisi ottiene
∫∫∫
Axyz dx dy dz =
∫ 1
0z dz
∫∫
Cxy dx dy
=
∫∫
Cxy dx dy
=
∫ 1
−1x dx
∫ √1−x2
−√1−x2
y dy
=
∫ 1
−1x(1− x2) dx
=
[x2
2− x4
4
]1
−1
= 0 .
Il risultato poteva anche essere dedotto dalla simmetria dell’insiemedi integrazione e della funzione integranda.

13.2 Cenni sull’integrale di Riemann in Rn 395
13.2.2 Cambiamento di variabile negli integrali multi-pli
Siano A e B sottoinsiemi aperti, limitati e misurabili di Rn e sia ϕ : B → Auna funzione verificante le seguenti condizioni:
1. ϕ e invertibile;
2. ϕ e derivabile parzialmente rispetto a tutte le variabili in B e tutte lederivate parziali sono continue in B;
3. ϕ e regolare in B, cioe per ogni y0 ∈ B il determinante della matricejacobiana J(ϕ, y0) di ϕ in y0 e diverso da 0:
∀ y0 ∈ B :∂(ϕ1, . . . ,ϕn)
∂(y1, . . . , yn)(y0) := det J(ϕ, (y1, . . . , yn))(y0) = 0 .
Se K ⊂ B e un sottoinsieme chiuso e limitato di B ed f : ϕ(K) → Re una funzione continua, allora vale la seguente formula di cambiamento divariabile degli integrali multipli:∫
· · ·∫
ϕ(K)f(x1, . . . , xn) dx1 · · · dxn (13.2.4)
=
∫· · ·∫
Kf ϕ(y1, . . . , yn)
∣∣∣∣∂(ϕ1, . . . ,ϕn)
∂(y1, . . . , yn)(y1, . . . , yn)
∣∣∣∣ dy1 · · · dyn ,
dove∂(ϕ1, . . . ,ϕn)
∂(y1, . . . , yn)(y1, . . . , yn) denota il determinante det J(ϕ, (y1, . . . , yn)))
della matrice jacobiana della trasformazione ϕ in (y1, . . . , yn).Si puo dimostrare che la formula precedente continua a valere se le con-
dizioni imposte alla trasformazione ϕ valgono in B "H, con H insieme dimisura nulla. Infatti, in tal caso e possibile decomporre B in un numerofinito di insiemi chiusi, limitati e misurabili con interni a due a due disgiun-ti e tali che H sia contenuto nella frontiera di tali insiemi; si puo quindiapplicare la formula di cambiamento di variabile ad ognuno di tali insiemie sommare opportunamente gli integrali ottenuti.
In particolare, la formula sul cambiamento di variabili rimane valida seil determinante jacobiano si annulla in un numero finito di punti.
Si osservi che la funzione ϕ esprime il seguente cambiamento di variabili⎧⎪⎪⎪⎨
⎪⎪⎪⎩
x1 := ϕ1(y1, . . . , yn) ,x2 := ϕ2(y1, . . . , yn) ,...xn := ϕn(y1, . . . , yn) ,

396 Capitolo 13: L’integrale di Riemann in Rn
dove ϕ1, . . . ,ϕn sono le componenti della funzione ϕ.
Un esempio spesso utilizzato di cambiamento di variabili in R2 e quelloin coordinate polari, ponendo
x := ρ cos θ ,y := ρ sin θ ,
Lo jacobiano J(ρ, θ) di tale trasformazione e quindi dato da
⎛
⎜⎝
∂x
∂ρ
∂x
∂θ∂y
∂ρ
∂y
∂θ
⎞
⎟⎠ =
(cos θ −ρ sin θsin θ ρ cos θ
),
ed il determinante jacobiano e det J(ρ, θ) = ρ.Poiche il determinante jacobiano si annulla solamente nell’origine, si puo
sempre usare la trasformazione in coordinate polari. Pertanto, se A e unsottoinsieme chiuso, limitato e misurabile di R2 e se f : A → R e unafunzione continua, si ha
∫∫
Af(x, y) dx dy =
∫∫
Bf(ρ cos θ, ρ sin θ) ρ dρ dθ ,
con B := (ρ, θ) ∈ [0,+∞]× [−π,π] | (ρ cos θ, ρ sin θ) ∈ A.
Ad esempio, si consideri il seguente integrale doppio
∫∫
Dx√x2 + y2 dx dy ,
dove D e il settore circolare del cerchio unitario con centro nell’originedelimitato dalle semirette y = ±x, x ≥ 0.
Utilizzando il cambiamento di variabili in coordinate polari
x = ρ cos θ ,y = ρ sin θ ,
il dominio D e l’immagine del dominio
B := (ρ, θ) ∈ [0,+∞[×[−π,π] | 0 ≤ ρ ≤ 1 , −π4≤ θ ≤ π
4
= [0, 1]×[−π4,π
4
]

13.2 Cenni sull’integrale di Riemann in Rn 397
x
y
D
Figura 13.2: Dominio di integrazione con trasformazione in coordinatepolari.
e quindi, usando anche le formule di riduzione per gli integrali doppi,
∫∫
Dx√x2 + y2 dx dy =
∫∫
Bρ cos θ ρ2 dρ dθ
=
∫ 1
0ρ3dρ
∫ π/4
−π/4cos θ dθ
=1
4[sin θ]π/4−π/4
=
√2
4.
Anche per gli integrali tripli viene spesso utilizzata la trasformazionein coordinate polari (o coordinate sferiche); considerato un punto P di R3
di coordinate (x, y, z), si considera la variabile ρ data dalla distanza di Pdall’origine (ρ ≥ 0), la variabile θ data dall’arco di circonferenza unitariatra il semiasse positivo dell’asse x e la semiretta passante per l’origine e laproiezione Q(x, y, 0) di P sul piano xy (−π < θ ≤ π) e la variabile ϕ datadall’arco di circonferenza unitaria tra il semiasse positivo dell’asse z e lasemiretta passante per l’origine ed il punto P (0 ≤ ϕ ≤ π). Quindi
⎧⎨
⎩
x = ρ cos θ sinϕ ,y = ρ sin θ sinϕ ,z = ρ cosϕ .

398 Capitolo 13: L’integrale di Riemann in Rn
Lo jacobiano di tale trasformazione e dato da
J(ρ, θ,ϕ) =
⎛
⎝cos θ sinϕ −ρ sin θ sinϕ ρ cos θ cosϕsin θ sinϕ ρ cos θ sinϕ ρ sin θ cosϕ
cosϕ 0 −ρ sinϕ
⎞
⎠ ,
ed il suo determinante e−ρ2 sinϕ ,
che si annulla sull’asse z e quindi in un insieme di misura nulla; quindi laformula di riduzione per gli integrali multipli puo essere applicata.
Ad esempio, si vuole calcolare l’integrale triplo∫∫∫
Dx2(y − z) dx dy dz ,
dove D e la semisfera unitaria con centro l’origine situata nel semispaziopositivo dell’asse z. Utilizzando la trasformazione in coordinate polari, ildominio D e l’immagine del seguente dominio
B :=(ρ, θ,ϕ) ∈ R3 | 0 ≤ ρ ≤ 1 , −π ≤ θ ≤ π , 0 ≤ ϕ ≤ π
2
e quindi l’integrale triplo diventa∫∫∫
Bρ2 cos2 θ sin2 ϕ ρ (sin θ sinϕ− cosϕ) ρ2 sinϕ dρ dθ dϕ
=
∫ π/2
0dϕ
∫ π
−π(cos2 θ sin4 ϕ sin θ − cos2 θ sin3 ϕ cosϕ) dθ
∫ 1
0ρ5 dρ
=1
6
∫ π/2
0
[−1
3cos3 θ sin4 ϕ− 1
2(θ + cos θ sin θ) sin3 ϕ cosϕ
]π
−πdϕ
=1
6
∫ π/2
0
(1
3sin4 ϕ− π
2sin3 ϕ cosϕ− 1
3sin4 ϕ− π
2sin3 ϕ cosϕ
)dϕ
= −π6
∫ π/2
0sin3 ϕ cosϕ dϕ
= −π6
[−1
8cos(2ϕ) +
1
32cos(4ϕ)
]π/2
0
= − π
24.
Un’altra trasformazione spesso utilizzata e quella in coordinate cilindri-che, che consistono nel trasformare in coordinate polari (nel piano xy) levariabili x ed y lasciando invariata l’ultima variabile z:
⎧⎨
⎩
x = ρ cos θ ,y = ρ sin θ ,z = z .

13.2 Cenni sull’integrale di Riemann in Rn 399
Lo jacobiano di tale trasformazione e dato da
J(ρ, θ, z) =
⎛
⎝cos θ −ρ sin θ 0sin θ ρ cos θ 00 0 1
⎞
⎠ ,
ed il suo determinante e ρ; il determinante jacobiano pertanto si annullasolamente sull’asse z e quindi la formula di riduzione per gli integrali multiplipuo essere applicata.
Ad esempio, si vuole calcolare l’integrale triplo∫∫∫
D
√x2 + y2 z dx dy dz ,
dove D e il cilindro che ha come base il cerchio unitario con centro l’originenel piano xy ed altezza l’intervallo [0, 1] sull’asse z. Utilizzando la trasfor-mazione in coordinate cilindriche, il dominio D e l’immagine del seguentedominio
B :=(ρ, θ, z) ∈ R3 | 0 ≤ ρ ≤ 1 , −π ≤ θ ≤ π , 0 ≤ z ≤ 1
e quindi l’integrale triplo diventa
∫∫∫
Bρ2 z dρ dθ dz =
∫ 1
0ρ2 dρ
∫ π
−πdθ
∫ 1
0z dz =
1
3· π ·
[z2
2
]1
0
=π
3.

Capitolo 14
Curve, campi vettoriali esuperfici
14.1 Curve regolari e lunghezza
Una curva in Rn e una funzione vettoriale continua ϕ : I → Rn definita inun intervallo I di R.
L’intervallo I viene denominato intervallo intervallo base della curva ϕmentre l’immagine ϕ∗ = ϕ(I) ⊂ Rn viene denominata sostegno della curvaϕ.
Assegnare quindi la curva ϕ : I → Rn equivale ad assegnare n funzionicontinue ϕ1, . . . ,ϕn : I → Rn (le componenti di ϕ) che forniscono le seguentiequazioni parametriche di ϕ
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
x1 := ϕ1(t) ,x2 := ϕ2(t) ,...xn := ϕn(t) ,
t ∈ I .
Assegnate le funzioni continue ϕ1, . . . ,ϕn : I → R, la curva ϕ : I → Ravente tali componenti viene data da
ϕ(t) :=n∑
i=1
ϕi(t) ei , t ∈ I .
Una curva ϕ : I → Rn viene denominata semplice se puo assumere lostesso valore solamente negli estremi, cioe se verifica la seguente condizione
∀ t1, t2 ∈ I , t1 < t2 : ϕ(t1) = ϕ(t2) =⇒ I = [t1, t2] .

402 Capitolo 14: Curve, campi vettoriali e superfici
Inoltre, una curva si dice chiusa se il suo intervallo base e un intervallochiuso e limitato agli estremi del quale la curva assume lo stesso valore;quindi ϕ : [a, b]→ Rn e chiusa se ϕ(a) = ϕ(b).
Esempi 14.1.1 1. Si considerino a = (a1, . . . , an) ∈ Rn e b = (b1, . . . , bn) ∈Rn. La curva ϕ : [0, 1] → Rn definita ponendo, per ogni t ∈ [0, 1],ϕ(t) := a+ t(b− a) ha come sostegno il segmento S[a, b] di estremi ae b.
Se a = b, essa e una curva semplice ma non chiusa.
2. Assegnati i punti distinti a0, a1, . . . , am ∈ Rn, si puo considerare la po-ligonale p[a0, . . . , am] : [0, 1]→ Rn congiungente i punti a0, a1, . . . , amdefinita ponendo, per ogni t ∈ [0, 1],
p[a0, . . . , am](t) :=
⎧⎨
⎩
ai +m(t− i
m
)(ai+1 − ai) , t ∈
[im , i+1
m
[,
i = 0, . . . ,m− 1 ,am , t = 1 .
Il supporto della poligonale p[a0, . . . , am] e costituito dall’unione deisegmenti congiungenti ai ed ai+1, i = 0, . . . ,m− 1, cioe
p[a0, . . . , am]∗ =m−1⋃
i=0
S[ai, ai+1] .
La poligonale p[a0, . . . , am] e chiusa se e solo se a0 = am ed e semplicese e solo se i segmenti che ne costituiscono il supporto possono averein comune solamente i vertici ed ognuno di questi ultimi appartiene alpiu a due segmenti distinti.
3. La curva γ : [0, 2π]→ R2 definita ponendo, per ogni t ∈ [0, 2π],
γ(t) := (cos t, sin t) ,
ha come supporto la circonferenza unitaria con centro l’origine nelpiano.
Piu in generale, si puo considerare la circonferenza di centro (x0, y0) ∈R2 e raggio r > 0 data dal supporto della curva γ(x0,y0),r : [0, 2π]→ R2
definita ponendo, per ogni t ∈ [0, 2π],
γ(x0,y0),r(t) := (x0 + r cos t, y0 + r sin t) .
4. Curve in coordinate cartesiane Se f : I → R e una funzionecontinua, si puo considerare in maniera naturale una curva ϕf : I →R2 ad essa associata definita ponendo, per ogni t ∈ I,
ϕf (t) := (t, f(t)) .

14.1 Curve regolari e lunghezza 403
La curva ϕf e sempre semplice e non chiusa e fornisce le coordinateparametriche della funzione f .
5. Curve in coordinate polari Se ρ : I → R e una funzione continua epositiva, si puo considerare in maniera naturale una curva γρ : I → R2
ad essa associata definita ponendo, per ogni θ ∈ I,
γρ(θ) := (ρ(θ) cos θ, ρ(θ) sin θ) .
La curva γρ fornisce le coordinate parametriche polari della funzioneρ.
Assegnate due curve ϕ : [a, c] → Rn e ψ : [c, b] → Rn tali che ϕ(c) =ψ(c), si puo considerare la curva unione ϕ∪ψ : [a, b]→ Rn definita ponendo,per ogni t ∈ [a, b],
(ϕ ∪ ψ)(t) :=ϕ(t) , t ∈ [a, c] ,ψ(t) , t ∈]c, b] . (14.1.1)
La denominazione adottata e giustificata dal fatto che il supporto dellacurva unione ϕ∪ψ e l’unione dei supporti delle curve ϕ e ψ, cioe (ϕ∪ψ)∗ =(ϕ∗) ∪ (ψ∗).
Una curva ϕ : I → Rn si dice regolare se e derivabile con derivata ϕ′
continua e, per ogni t ∈ I, si ha ϕ′(t) = 0.Quindi ϕ e regolare se e solo se le sue componenti ϕ1, . . .ϕn : I → R
sono derivabili in I e le loro derivate sono continue e non si annullanocontemporaneamente in alcun punto di I (infatti, per ogni t ∈ I, deveessere
∑ni=1 ϕ
′n(t)
2 > 0).Inoltre, una curva ϕ : I → Rn si dice regolare a tratti se e unione di un
numero finito di curve regolari e quindi se e solo se esistono t0, . . . , tm ∈ Rtali che inf I = t0 < t1 < · · · < tm−1 < tm = sup I (se I non e limitatoinferiormente si pone t0 = −∞ e se I non e limitato superiormente si ponetm = +∞) e inoltre, per ogni i = 0, . . . ,m−1, la curva ϕ|I∩[ti,ti+1] e regolare.
Pertanto, una curva ϕ : I → Rn e regolare se e solo se ϕ e derivabile conderivata non nulla tranne al piu che in un numero finito di punti nei qualituttavia esistono le derivate sinistre e destre e sono entrambe non nulle.
La condizione di regolarita e utile per definire la tangente ad una curvain un punto, come di seguito precisato.
Si supponga che ϕ : I → Rn sia una curva regolare e sia t0 ∈ I. Per ognit1 ∈ I " t0 la retta secante il grafico di ϕ nei punti (t0,ϕ(t0)) ∈ Rn+1 e(t1,ϕ(t1)) ∈ Rn+1 ha equazione
y = ϕ(t0) + (t− t0)ϕ(t1)− ϕ(t0)
t1 − t0, (t, y) ∈ R× Rn ,

404 Capitolo 14: Curve, campi vettoriali e superfici
e considerando il limite per t1 → t0 si ottiene l’equazione della retta tangenteal sostegno di ϕ nel punto (t0,ϕ(t0))
y = ϕ(t0) + (t− t0)ϕ′(t0) , (t, y) ∈ R× Rn . (14.1.2)
Nel caso delle curve regolari a tratti, si possono definire in ogni puntole equazioni delle rette tangenti a sinistra e a destra.
Si verifica facilmente che le curve considerate negli Esempi 14.1.1 prece-denti sono regolari a tratti.
Ad esempio, nel caso dell’Esempio 14.1.1, 1., per ogni t0 ∈ [0, 1] si haϕ′(t) = b−a e quindi la retta tangente al sostegno di ϕ nel punto (t0,ϕ(t0))ha equazione
y = ϕ(t0) + (t− t0) (b− a) = a+ t0(b− a) + (t− t0) (b− a) = a+ t(b− a) ,
(t, y) ∈ R× Rn.Si considerino ora i punti distinti a0, a1, . . . , am ∈ Rn e sia p[a0, . . . , am] :
[0, 1]→ Rn la poligonale congiungente i punti a0, a1, . . . , am definita nell’E-sempio 14.1.1, 2.; allora p[a0, . . . , am] e una curva regolare a tratti e, perogni i = 0, . . . ,m−1 e t ∈]i/m, (i+1)/m[ si ha p[a0, . . . , am]′(t) = ai+1−ai.Per ogni i = 0, . . . ,m − 1 e t0 ∈]i/m, (i + 1)/m[, la retta tangente al so-stegno di p[a0, . . . , am] in (t0,ϕ(t0)) ha equazione y = ai + t(ai+1 − ai),t ∈ R; tale equazione rappresenta anche la retta tangente a destra in(ai, p[a0, . . . , am](ai)) ed a sinistra in (ai+1, p[a0, . . . , am](ai+1)).
Si consideri infine la curva γ(x0,y0),r : [0, 2π]→ R2 definita nell’Esempio14.1.1, 3. Essa e regolare e, per ogni t0 ∈ [0, 1],
γ′(x0,y0),r(t0) := (−r sin t, r cos t) .
L’equazione della retta tangente in (t0, γ(x0,y0),r(t0)) ha equazione
(x, y) = γ(x0,y0),r(t0) + (t− t0) γ′(x0,y0),r
(t0)
= (x0 + r cos t, y0 + r sin t) + (t− t0) (−r sin t, r cos t)
= (x0 + r cos t− r (t− t0) sin t, y0 + r sin t+ r (t− t0) cos t) ,
t ∈ R. In forma parametrica la retta tangente ha quindi le seguenti equazioni
x = x0 + r cos t− r (t− t0) sin t ,y = y0 + r sin t+ r (t− t0) cos t ,
t ∈ R .
Sia f : I → R una funzione continua e si consideri la curva ϕf : I → R2
ad essa associata definita ponendo, per ogni t ∈ I,
ϕf (t) := (t, f(t)) .

14.1 Curve regolari e lunghezza 405
Se f e derivabile e con derivata continua allora la curva ϕf e regolare e siha, per ogni t ∈ I,
ϕ′f (t) = (1, f ′(t)) ( = (0, 0)) .
Se t0 ∈ I, l’equazione della retta tangente in (t0,ϕf (t0)) ha equazione
(x, y) = ϕf (t0) + (t− t0)ϕ′f (t0)
= (t0, f(t0)) + (t− t0) (1, f′(t0))
= (t, f(t0) + f ′(t0)(t− t0)) ,
t ∈ R. In forma parametrica la retta tangente ha quindi le seguenti equazioni
x = t ,y = f(t0) + f ′(t0)(t− t0) ,
t ∈ R ,
ed eliminando il parametro t tra le due equazioni, si ottiene
y = f(t0) + f ′(t0)(x− t0) ,
cioe l’equazione della retta tangente al grafico di f nel punto (t0, f(t0))(vedasi la (9.1.4)).
Sia ρ : I → R una funzione continua e positiva e si consideri la curvaγρ : I → R2 definita ponendo, per ogni θ ∈ I,
γρ(θ) := (ρ(θ) cos θ, ρ(θ) sin θ) .
Se ρ e derivabile con derivata continua e se ρ e ρ′ non si annullano maicontemporaneamente, allora γρ e regolare.
Infatti, per ogni θ ∈ I,
γ′ρ(θ) = (ρ′(θ) cos θ − ρ(θ) sin θ, ρ′(θ) sin θ + ρ(θ) cos θ)
e poiche ∥γ′ρ(θ)∥ =√ρ(θ)2 + ρ′(θ)2 = 0, la curva γρ e regolare.
Per ogni θ0 ∈ I, l’equazione della retta tangente in (θ0, γρ(θ0)) haequazione
(x, y) = γρ(θ0) + (θ − θ0) γ′ρ(θ0)= (ρ(θ0) cos θ0, ρ(θ0) sin θ0)
+(θ − θ0) (ρ′(θ) cos θ − ρ(θ) sin θ, ρ′(θ) sin θ + ρ(θ) cos θ)
= (ρ(θ0) cos θ0 + (θ − θ0) (ρ′(θ) cos θ − ρ(θ) sin θ),ρ(θ0) sin θ0 + (θ − θ0) (ρ′(θ) sin θ + ρ(θ) cos θ)) ,

406 Capitolo 14: Curve, campi vettoriali e superfici
θ ∈ R. In forma parametrica la retta tangente ha quindi le seguentiequazioni
x = ρ(θ0) cos θ0 + (θ − θ0) (ρ′(θ) cos θ − ρ(θ) sin θ) ,y = ρ(θ0) sin θ0 + (θ − θ0) (ρ′(θ) sin θ + ρ(θ) cos θ) ,
θ ∈ R .
Si osservi che l’intervallo base di una curva puo essere modificato aseconda delle necessita considerando una opportuna trasformazione lineare.Ad esempio, se ϕ : [a, b]→ Rn e una curva definita in un intervallo chiuso elimitato con a < b e se [c, d] e un ulteriore intervallo di R con c < d si puoconsiderare la funzione j : [c, d]→ [a, b] definita ponendo, per ogni s ∈ [c, d],
j(s) :=b− a
d− cs+
ad− bc
d− c.
Allora, la curva ψ := ϕ j : [c, d]→ Rn ha lo stesso sostegno di ϕ e inoltre,poiche j e j−1 sono derivabili e le loro derivate sono sempre diverse da zero,la curva ψ e regolare (rispettivamente, regolare a tratti) se e solo se ϕ eregolare (rispettivamente, regolare a tratti).
Sia ora t0 ∈ [a, b] tale che ϕ sia derivabile in t0 con ϕ′(t0) = 0. Con-siderato s0 := j−1(t0), si ha che ψ e derivabile in s0 e la sua derivata eψ′(s0) = (d − c)/(b − a). Conseguentemente, la retta tangente al supportodi ψ in (s0,ψ(s0)) ha equazione
y = ψ(s0)+(s−s0)ψ′(s0) = ϕ(t0)+(s−s0)d− c
b− aϕ′(t0) = ϕ(t0)+(t−t0)ϕ′(t0) ,
(t, y) ∈ R×Rn, e quindi l’equazione della retta tangente non dipende dallascelta dell’intervallo base.
Piu in generale, le proprieta precedenti possono essere verificate per lecurve equivalenti, nel senso di seguito specificato.
Si dice che due curve ϕ : I → Rn e ψ : J → Rn sono equivalenti se esisteuna funzione j : J → I invertibile e di classe C1 insieme alla sua inversa(cioe sia j che j−1 sono derivabili e con derivata continua) tale che, per ognis ∈ J , si abbia j′(s) = 0 ed inoltre ψ = ϕ j.
Si verifica facilmente che se due curve sono equivalenti, esse hanno lostesso sostegno (e quindi se una e chiusa o rispettivamente semplice anchel’altra lo e) ed inoltre la regolarita (rispettivamente, la regolarita a tratti)dell’una comporta quella dell’altra; in tal caso, le rette tangenti dipendonosolamente dal punto del sostegno e non dalla curva equivalente considerata.
Assegnate due curve equivalenti ϕ : I → Rn e ψ : J → Rn con ψ = ϕ j,si dice che ϕ e ψ hanno lo stesso verso di percorrenza (rispettivamente, che

14.1 Curve regolari e lunghezza 407
hanno versi di percorrenza opposti) se, per ogni s0 ∈ J , posto t0 := j(s0) ∈I, si ha
ψ(J ∩ [s0,+∞[) = ϕ(I ∩ [t0,+∞[)
rispettivamente, ψ(J ∩ [s0,+∞[) = ϕ(I∩]−∞, t0]) ).
Il primo caso si verifica quando j ha derivata strettamente positiva, mentreil secondo quando j ha derivata strettamente negativa.
Assegnata una curva ϕ : [a, b]→ Rn, si puo considerare la curva oppostaϕo : [a, b]→ Rn definita ponendo, per ogni t ∈ [a, b],
ϕo(t) := ϕ(a+ b− t) . (14.1.3)
La curva opposta ϕo e equivalente a ϕ ma ha verso di percorrenza opposto.
Un’altra proprieta invariante delle curve equivalenti viene messa in evi-denza dal concetto di lunghezza di una curva, di cui ci si vuole ora occupare.
Innanzitutto, si osserva che la definizione di lunghezza si puo dare inmaniera immediata per il segmento p[a, b] congiungente due punti a, b ∈ Rn.Infatti, si puo porre
ℓ(p[a, b]) := ∥b− a∥ .
Conseguentemente, la lunghezza di una poligonale p[a, . . . , am] di verticia0, . . . , am puo essere definita come segue
ℓ(p[a0, . . . , am]) :=m−1∑
i=0
∥ai+1 − ai∥ .
Si consideri una curva arbitraria ϕ : I → Rn. Una poligonale p[a0, . . . , am]si dice inscritta alla curva ϕ se esistono t0, . . . , tm ∈ I tali che t0 < t1 <· · · < tm e inoltre, per ogni i = 0, . . . ,m, ϕ(ti) = ai.
Si denoti ora con Pϕ l’insieme di tutte le poligonali inscritte alla curvaϕ. Per ogni poligonale p ∈ Pϕ, ha senso per quanto gia visto considerare lalunghezza ℓ(p) di p e cio giustifica la seguente definizione.
Si dice che la curva ϕ : I → Rn e rettificabile se
supp∈Pϕ
ℓ(p) < +∞ .
In tal caso, la lunghezza di ϕ e definita ponendo
ℓ(ϕ) := supp∈Pϕ
ℓ(p) .
Per le curve regolari a tratti, vale il seguente risultato.

408 Capitolo 14: Curve, campi vettoriali e superfici
Teorema 14.1.2 Sia ϕ : [a, b]→ Rn una curva regolare a tratti definita inun intervallo chiuso e limitato [a, b]. Allora, ϕ e rettificabile e si ha1
ℓ(ϕ) =
∫ b
a∥ϕ′(t)∥ dt . (14.1.4)
Ad esempio, si consideri la curva γ(x0,y0),r : [0, 2π]→ R2 definita nell’E-sempio 14.1.1, 3. Dal Teorema 14.1.2, essa e rettificabile e la sua lunghezzae data da
ℓ(γ(x0,y0),r) =
∫ 2π
0
√r2(cos2 t+ sin2 t) dt = 2π r .
Sia f : [a, b] → R una funzione derivabile e con derivata continua e siconsideri la curva ϕf : [a, b] → R2 ad essa associata definita ponendo, perogni t ∈ [a, b],
ϕf (t) := (t, f(t)) .
Allora, dal Teorema 14.1.2, ϕf e rettificabile e
ℓ(ϕ) =
∫ b
a∥ϕ′
f (t)∥ dt
=
∫ b
a∥(1, f ′(t))∥ dt
=
∫ b
a
√1 + f ′(t)2 dt .
Sia ρ : [θ1, θ2] → R una funzione positiva derivabile con derivata conti-nua e tale che ρ e ρ′ non si annullino mai contemporaneamente.
Si consideri la curva γρ : [θ1, θ2] → R2 definita ponendo, per ogni θ ∈[θ1, θ2],
γρ(θ) := (ρ(θ) cos θ, ρ(θ) sin θ) .
Dal Teorema 14.1.2, γρ e rettificabile e si ha
ℓ(γρ) =
∫ θ2
θ1
√ρ(θ)2 + ρ′(θ)2 dθ .
Tra le proprieta della lunghezza di una curva, conviene segnalare leseguenti, di immediata verifica
1Si osservi che la funzione ϕ′ e continua tranne che in un numero finito di punti didiscontinuita di prima specie; pertanto ϕ′ e integrabile in [a, b] e conseguentemente lo eanche ∥ϕ′∥.

14.2 Integrali curvilinei e campi vettoriali conservativi 409
1. Siano ϕ : [a, c]→ Rn e ψ : [c, b]→ Rn due curve tali che ϕ(c) = ψ(c) esi consideri la curva unione ϕ ∪ ψ : [a, b]→ Rn definita dalla (14.1.1).Se ϕ e ψ sono entrambe regolari a tratti, allora anche ϕ∪ψ e regolarea tratti e la sua lunghezza e data da
ℓ(ϕ ∪ ψ) = ℓ(ϕ) + ℓ(ψ) .
2. Sia ϕ : [a, b]→ Rn una curva regolare a tratti. Allora
ℓ(ϕ) ≤ (b− a) maxt∈[a,b]
∥ϕ′(t)∥ .
14.2 Integrali curvilinei e campi vettoriali con-servativi
14.2.1 Integrali curvilinei
Sia ϕ : [a, b] → Rn una curva regolare a tratti e si consideri una funzionereale continua f : A → R in un sottoinsieme aperto A di Rn contenente ilsupporto della curva ϕ (cioe ϕ∗ ⊂ A). Si osservi che la funzione (f ϕ) ∥ϕ′∥e integrabile in [a, b] in quanto prodotto di una funzione continua con unafunzione continua a tratti.
Si definisce integrale curvilineo di f lungo la curva ϕ il seguente numeroreale ∫
ϕf ds :=
∫ b
af(ϕ(t)) ∥ϕ′(t)∥ dt . (14.2.1)
Si osservi che l’integrale curvilineo della funzione costante di costantevalore 1 e uguale alla lunghezza della curva.
L’integrale curvilineo dipende dai valori della funzione f sul supportodella curva ϕ, ma non dal suo orientamento, come si evince dalle proprietadi seguito enunciate.
Proposizione 14.2.1 Valgono le seguenti proprieta degli integrali curvili-nei:
1. Proprieta di linearita Siano f, g : A → R funzioni continue in unsottoinsieme aperto A di Rn e ϕ : [a, b] → Rn una curva regolare atratti tale che ϕ∗ ⊂ A. Allora, per ogni λ ∈ R,
∫
ϕ(f + g) ds =
∫
ϕf ds+
∫
ϕg ds ,
∫
ϕ(λ f) ds = λ
∫
ϕf ds .
410 Capitolo 14: Curve, campi vettoriali e superfici
2. Proprieta di monotonia Siano f, g : A → R funzioni continue inun sottoinsieme aperto A di Rn e ϕ : [a, b]→ Rn una curva regolare atratti tale che ϕ∗ ⊂ A. Se f ≤ g (cioe, per ogni x ∈ A, f(x) ≤ g(x)),allora si ha anche ∫
ϕf ds ≤
∫
ϕg ds .
3. Siano f : A → R una funzione continua in un sottoinsieme aperto Adi Rn e ϕ : [a, b] → Rn una curva regolare a tratti tale che ϕ∗ ⊂ A.Allora ∣∣∣∣
∫
ϕf ds
∣∣∣∣ ≤ supx∈ϕ∗
|f(x)| ℓ(ϕ) .
4. Siano f : A → R una funzione continua in un sottoinsieme aperto Adi Rn e ϕ : [a, b] → Rn una curva regolare a tratti tale che ϕ∗ ⊂ A.Considerata la curva opposta ϕo : [a, b] → Rn definita dalla (14.1.3),si ha che ϕo e anch’essa regolare a tratti ed inoltre
∫
ϕf ds =
∫
ϕo
f ds .
5. Siano f : A → R una funzione continua in un sottoinsieme aperto Adi Rn e ϕ : [a, c] → Rn e ψ : [c, b] → Rn due curve regolari a trattitali che ϕ(c) = ψ(c) e ϕ∗ ⊂ A, ψ∗ ⊂ A. Si consideri la curva unioneϕ∪ψ : [a, b]→ Rn definita dalla (14.1.1); allora anche ϕ∪ψ e regolarea tratti, (ϕ ∪ ψ)∗ ⊂ A ed inoltre
∫
ϕ∪ψf ds =
∫
ϕf ds+
∫
ψf ds .
Dimostrazione. Le proprieta 1. e 2. sono immediata conseguenza della definizione diintegrale curvilineo.
Per quanto riguarda la proprieta 3. basta osservare che∣∣∣∣∫
ϕf ds
∣∣∣∣ =
∣∣∣∣∫ b
af(ϕ(t)) ∥ϕ′(t)∥ dt
∣∣∣∣ ≤∫ b
a|f(ϕ(t))| ∥ϕ′(t)∥ dt
≤ supx∈ϕ∗
|f(x)|∫ b
a∥ϕ′(t)∥ dt ≤ sup
x∈ϕ∗|f(x)| ℓ(ϕ) .
Nelle ipotesi della proprieta 4. si ha∫
ϕof ds =
∫ b
af(ϕo(t)) ∥(ϕo)′(t)∥ dt =
∫ b
af(ϕ(a+ b− t)) ∥ − ϕ′(a+ b− t)∥ dt
=
∫ a
bf(ϕ(u)) ∥ϕ′(u)∥ (−du) =
∫ b
af(ϕ(u)) ∥ϕ′(u)∥ du =
∫
ϕf ds .
Infine, la proprieta 5. segue direttamente dalle definizioni di integrale curvilineo e di
curva unione. #

14.2 Integrali curvilinei e campi vettoriali conservativi 411
14.2.2 Integrali curvilinei di un campo vettoriale
Una funzione continua vettoriale F : A → Rn definita in un sottoinsiemeaperto A ⊂ Rn viene denominata campo vettoriale.
Se ϕ : [a, b] → Rn e una curva regolare a tratti tale che ϕ∗ ⊂ A, si puodefinire l’integrale curvilineo del campo vettoriale F ponendo
∫
ϕF · dℓ :=
∫ b
a(F (ϕ(t)) |ϕ′(t)) dt =
∫ b
a
n∑
i=1
Fi(ϕ(t))ϕ′i(t) dt (14.2.2)
(nell’ultima uguaglianza si sono denotate con ϕ1, . . . ,ϕn le componenti diϕ).
Per evidenziare il fatto che l’integrale curvilineo dipende dal verso di per-correnza della curva, spesso si precisa che l’integrale curvilineo deve essereinteso nel verso da ϕ(a) a ϕ(b).
Nonostante l’analogia delle notazioni usate per l’integrale curvilineo diuna funzione e di un campo vettoriale nel caso n = 1, sara comunque chiarodal contesto l’integrale curvilineo da considerare.
Inoltre l’integrale curvilineo di un campo vettoriale F viene spesso de-notato anche con il simbolo ∫
ϕ(F |dℓ) ,
intendendo dℓ come il differenziale vettoriale (dx1, . . . , dxn).Alcune proprieta degli integrali curvilinei di campi vettoriali sono enun-
ciate nella seguente proposizione.
Proposizione 14.2.2 Valgono le seguenti proprieta degli integrali curvili-nei di un campo vettoriale:
1. Proprieta di linearita Siano F,G : A → Rn campi vettoriali in unsottoinsieme aperto A di Rn e sia ϕ : [a, b] → Rn una curva regolarea tratti tale che ϕ∗ ⊂ A. Allora, per ogni λ ∈ R,∫
ϕ(F+G)·dℓ =
∫
ϕF ·dℓ+
∫
ϕG·dℓ ,
∫
ϕ(λF+G)·dℓ = λ
∫
ϕF ·dℓ .
2. Siano F : A → Rn un campo vettoriale in un sottoinsieme aperto Adi Rn e ϕ : [a, b] → Rn una curva regolare a tratti tale che ϕ∗ ⊂ A.Allora ∣∣∣∣
∫
ϕF · dℓ
∣∣∣∣ ≤ supx∈ϕ∗
∥F (x)∥ ℓ(ϕ) .

412 Capitolo 14: Curve, campi vettoriali e superfici
3. Siano F : A → Rn un campo vettoriale in un sottoinsieme aperto Adi Rn e ϕ : [a, b] → Rn una curva regolare a tratti tale che ϕ∗ ⊂ A.Considerata la curva opposta ϕo : [a, b] → Rn definita dalla (14.1.3),si ha ∫
ϕo
F · dℓ = −∫
ϕF · dℓ .
4. Siano F : A → Rn un campo vettoriale in un sottoinsieme aperto Adi Rn e ϕ : [a, c] → Rn e ψ : [c, b] → Rn due curve regolari a trattitali che ϕ(c) = ψ(c) e ϕ∗ ⊂ A, ψ∗ ⊂ A. Si consideri la curva unioneϕ ∪ ψ : [a, b]→ Rn definita dalla (14.1.1); allora
∫
ϕ∪ψF · dℓ =
∫
ϕF · dℓ+
∫
ψF · dℓ .
Dimostrazione. La proprieta 1. e ovvia in base alla definizione di integrale curvilineo.Per quanto riguarda la proprieta 2. basta osservare che, dalla diseguaglianza (12.1.1)
di Cauchy-Schwarz∣∣∣∣∫
ϕF · dℓ
∣∣∣∣ =
∣∣∣∣∫ b
a(F (ϕ(t)) |ϕ′(t)) dt
∣∣∣∣ ≤∫ b
a
∣∣(F (ϕ(t)) |ϕ′(t))∣∣ dt
≤∫ b
a∥(F (ϕ(t))∥ ∥ϕ′(t))∥ dt ≤ sup
x∈ϕ∗∥F (x)∥
∫ b
a∥ϕ′(t))∥ dt
= supx∈ϕ∗
∥F (x)∥ ℓ(ϕ) .
Nelle ipotesi della proprieta 3. si ha
∫
ϕoF · dℓ =
∫ b
a
n∑
i=1
Fi(ϕo(t)) (ϕo
i )′(t) dt =
∫ b
a
n∑
i=1
Fi(ϕ(a+ b− t)) (−ϕ′i(a+ b− t)) dt
=
∫ a
b
n∑
i=1
Fi(ϕ(u)) (−ϕ′i(u)) (−du) =
∫ a
b
n∑
i=1
Fi(ϕ(u))ϕ′i(u) du
= −∫ b
a
n∑
i=1
Fi(ϕ(u))ϕ′i(u) du = −
∫
ϕF · dℓ .
Infine, la proprieta 4. segue direttamente dalle definizioni. #
14.2.3 Campi vettoriali conservativi
Un campo vettoriale F : A→ Rn su un insieme aperto connesso A ⊂ Rn sidice conservativo se esiste una funzione f : A → R derivabile parzialmentein A e con derivate parziali continue tale che, per ogni i = 1, . . . , n, denotatacon Fi la componente i-esima di F , si abbia
∂f
∂xi= Fi (14.2.3)

14.2 Integrali curvilinei e campi vettoriali conservativi 413
(cioe ∇f = F ).Ogni funzione f : A → R verificante la (14.2.3) viene denominata
potenziale oppure primitiva del campo vettoriale F .
Nel seguito, per ogni k ∈ N, si denotera per brevita con Ck(A) l’insiemedi tutte le funzioni dotate di tutte le derivate parziali continue fino all’ordinek in A, con la convenzione C0(A) = C(A). Una funzione appartenente aCk(A) verra piu brevemente denominata di classe Ck(A). Tali notazionisi applicano ovviamente anche alle funzioni vettoriali intendendole vere perogni componente (quindi F ∈ Ck(A) significa che tutte le componenti di Fsono dotate di tutte le derivate parziali continue fino all’ordine k in A).
Poiche F e continua, affinche valga la (14.2.3), un potenziale deve ne-cessariamente avere tutte le derivate parziali continue e quindi, in base allenotazioni assunte, f ∈ C1(A).
I potenziali di un campo vettoriale su un insieme aperto connesso sonodeterminati a meno di una costante, nel senso che aggiungendo una funzionecostante ad un potenziale si ottiene ancora un potenziale e viceversa duepotenziali differiscono sempre per una costante.
I campi vettoriali conservativi sono caratterizzati mediante proprietadegli integrali curvilinei.
Teorema 14.2.3 Siano A un sottoinsieme aperto connesso di Rn ed F :A → Rn un campo vettoriale. Allora le seguenti proposizioni sono equiva-lenti:
a) F e conservativo;
b) Se ϕ : [a, b] → Rn e ψ : [c, d] → Rn sono curve regolari a tratti taliche ϕ∗ ⊂ A, ψ∗ ⊂ A e ϕ(a) = ψ(c), ϕ(b) = ψ(d), allora
∫
ϕF · dℓ =
∫
ψF · dℓ ;
c) Se ϕ : [a, b]→ Rn e una curva chiusa tale che ϕ∗ ⊂ A, si ha
∫
ϕF · dℓ = 0 .
Dal risultato precedente segue che l’integrale curvilineo di un campovettoriale conservativo dipende solo dai punti estremi del supporto dellacurva e non dal percorso che li congiunge.

414 Capitolo 14: Curve, campi vettoriali e superfici
Se F : A → Rn e un campo vettoriale conservativo su un sottoinsiemeaperto connesso A e se f : A → R e un potenziale di F allora, per ognicurva regolare a tratti ϕ : [a, b]→ Rn tale che ϕ∗ ⊂ A, si ha
∫
ϕF · dℓ = f(ϕ(b))− f(ϕ(a)) .
Infatti∫
ϕF · dℓ =
∫ b
a(F (ϕ(t)) |ϕ′(t)) dt =
∫ b
a
n∑
i=1
Fi(ϕ(t))ϕ′i(t) dt
=
∫ b
a
n∑
i=1
∂f
∂xi(ϕ(t))ϕ′
i(t) dt =
∫ b
a(f ϕ)′(t) dt = f(ϕ(b))− f(ϕ(a)) .
Il risultato precedente tuttavia viene solitamente applicato per ricono-scere che un campo vettoriale non e conservativo. Data l’arbitrarieta dellecurve regolari a tratti previste nelle condizioni b) e c), non risulta infattipercorribile la verifica di tali condizioni, mentre trovarne una per cui la b) ola c) non vale significa dimostrare che il campo vettoriale non e conservativo.
Per riconoscere che un campo vettoriale e conservativo bisogna quindiricorrere ad ulteriori strumenti che ora ci cerchera di approfondire.
Si supponga che A sia un sottoinsieme aperto di Rn e che F : A → Rn
sia un campo vettoriale di classe C1(A). Se f : A → R e un potenzialedi F allora, dalla (14.2.3), si ricava che f ∈ C2(A) e inoltre, per ognii, j = 1, . . . , n, dal Teorema 12.3.8 sull’invertibilita dell’ordine di derivazionesegue
∂Fi
∂xj=
∂
∂xj
(∂f
∂xi
)=
∂2f
∂xj ∂xi=
∂2f
∂xi ∂xj=
∂
∂xi
(∂f
∂xj
)=∂Fj
∂xi.
Un campo vettoriale F : A → Rn di classe C1(A) viene denominatoirrotazionale se verifica la seguente condizione
∂Fi
∂xj=∂Fj
∂xi. (14.2.4)
Quindi ogni campo vettoriale conservativo F : A→ Rn di classe C1(A)e irrotazionale. Il viceversa non e sempre vero e bisogna aggiungere dellecondizioni sulla struttura dell’insieme A per poter assicurare che un campoirrotazionale sia conservativo.
Siano A ⊂ Rn ed x0 ∈ A. Si dice che A e un insieme stellato rispetto adx0 se, per ogni x ∈ A, il segmento congiungente x0 ed x e contenuto in A,cioe
∀ x ∈ A ∀ t ∈ [0, 1] : x0 + t(x− x0) ∈ A . (14.2.5)

14.2 Integrali curvilinei e campi vettoriali conservativi 415
Inoltre, un insieme A ⊂ Rn si dice stellato se esiste x0 ∈ A rispetto al qualeA e stellato.
Si osservi che ogni insieme convesso e stellato; piu precisamente, uninsieme e convesso se e solo se esso e stellato rispetto ad ogni suo punto.
Teorema 14.2.4 Se F : A → Rn e un campo vettoriale irrotazionale diclasse C1(A) su un insieme aperto stellato, allora F e conservativo.
Il risultato precedente consente di affermare che un campo vettoriale diclasse C1(A) su un insieme aperto stellato e conservativo se e solo se essoe irrotazionale. La condizione (14.2.4) e di immediata verifica e fornisce unmetodo elementare per riconoscere che un campo vettoriale e conservativo.
Tuttavia, una volta stabilito che un campo vettoriale e conservativo,rimane aperto il problema di determinarne un potenziale.
A tal fine, i metodi utilizzati piu frequentemente sono i seguenti:
1. Si supponga che A sia un sottoinsieme aperto stellato di Rn rispettoal punto x0 ∈ A e sia F : A → Rn un campo vettoriale conservativo.Allora la funzione f : A→ R definita ponendo, per ogni x ∈ A,
f(x) :=
∫
ϕF · dℓ ,
dove ϕ : [a, b] → Rn e una qualsiasi curva regolare a tratti con sup-porto contenuto in A e congiungente i punti x0 ed x (cioe ϕ(a) = x0
e ϕ(b) = x),2 e un potenziale di F ; precisamente, e il potenziale di Fche si annulla in x0.
2. Si supponga che F : A → Rn sia un campo vettoriale conservativosu un sottoinsieme aperto connesso A di Rn. Si consideri la primacomponente F1 : A → R e, per ogni (x1, . . . , xn) ∈ A, una sua pri-mitiva f1 : A → R rispetto alla variabile x1; tale primitiva dipendeovviamente da x2, . . . , xn al pari quindi della costante arbitraria. Siha pertanto
∫F (x1, x2, . . . , xn) dx1 = f(x1, x2, . . . , xn) + g(x2, . . . , xn) ,
dove g e una funzione arbitraria delle variabili x2, . . . , xn. Per deter-minare la funzione g si impongono le ulteriori condizioni previste nella(14.2.4)
∂f1∂xi
+∂g
∂xi= Fi , i = 2, . . . , n .
2Si osservi che la funzione f e ben definita in quanto, dal Teorema 14.2.3, l’integralecurvilineo non dipende dalla curva ma solamente dai punti x0 ed x.

416 Capitolo 14: Curve, campi vettoriali e superfici
Una volta risolte le equazioni precedenti la funzione f : A→ R definitaponendo, per ogni x = (x1, . . . , xn) ∈ A,
f(x1, . . . , xn) := f1(x1, . . . , xn) + g(x2, . . . , xn) ,
e un potenziale di F .
14.3 Superfici ed integrali superficiali
Sia A un sottoinsieme aperto connesso di R2. Si dice che una funzioneϕ : A→ R3 e una superfice regolare se essa verifica le seguenti condizioni
1. ϕ e iniettiva;
2. ϕ ∈ C1(A), cioe le componenti di ϕ sono derivabili parzialmenterispetto a tutte le variabili in A e le derivate parziali sono continue;
3. Per ogni (u, v) ∈ A, la matrice jacobiana
J(ϕ, (u, v)) =
⎛
⎜⎜⎜⎜⎜⎜⎝
∂ϕ1
∂u(u, v)
∂ϕ1
∂v(u, v)
∂ϕ2
∂u(u, v)
∂ϕ2
∂v(u, v)
∂ϕ3
∂u(u, v)
∂ϕ3
∂v(u, v)
⎞
⎟⎟⎟⎟⎟⎟⎠
di ϕ ha rango 2.
Si supponga che K ⊂ R2 sia chiuso, limitato e connesso e coincida con
la chiusura del proprio interno (K = K); una funzione ϕ : K → R3 si
dice superfice regolare compatta se la sua restrizione all’interno di K e unasuperfice regolare. Inoltre, una superfice regolare compatta si dice chiusase esiste un sottoinsieme di R3 la cui frontiera coincide con ϕ(K), cioe
∃ B ⊂ R3 t.c. ∂B = ϕ(K) .
Un esempio molto importante di superfice regolare viene fornito dallesuperfici regolari cartesiane. Sia K ⊂ R2 chiuso, limitato e connesso e tale
cheK = K). Se f : K → R e una funzione di classe C1(
K), allora la
funzione ϕf : K → R3 definita ponendo, per ogni (x, y) ∈ K,
ϕf (x, y) := (x, y, f(x, y)) , (14.3.1)

14.3 Superfici ed integrali superficiali 417
e una superfice regolare compatta. Infatti essa e ovviamente iniettiva e
inoltre, per ogni (x, y) ∈K, la matrice jacobiana di ϕf
J(ϕf , (x, y)) =
⎛
⎜⎜⎜⎜⎝
1 0
0 1
∂f
∂x(x, y)
∂f
∂y(x, y)
⎞
⎟⎟⎟⎟⎠
ha rango 2 in quanto la matrice da essa estratta e costituita dalle prime duerighe ha determinante sempre uguale ad 1.
Assegnata ora una superfice regolare compatta ϕ : K → R3, se ne vuoledefinire l’area.
Innanzitutto, per ogni (u, v) ∈K, si pone
∂ϕ
∂u(u, v) :=
(∂ϕ1
∂u(u, v),
∂ϕ2
∂u(u, v),
∂ϕ3
∂u(u, v)
),
∂ϕ
∂v(u, v) :=
(∂ϕ1
∂v(u, v),
∂ϕ2
∂v(u, v),
∂ϕ3
∂v(u, v) ;
).
A questo punto, l’area della superfice compatta ϕ viene definita come segue3
A(ϕ) :=
∫∫
K
∥∥∥∥∂ϕ
∂u(u, v) ∧ ∂ϕ
∂v(u, v)
∥∥∥∥ du dv . (14.3.2)
Sia f : K → R una funzione di classe C1(K) e si consideri la funzione
ϕf : K → R3 definita dalla (14.3.1).Utilizzando la (14.3.2), l’area della superfice ϕf , cioe del grafico di f , e
data da
A(ϕf ) =
∫∫
K
√
1 +
(∂f
∂x(x, y)
)2
+
(∂f
∂y(x, y)
)2
dx dy .
3Si ricorda che il prodotto vettoriale x ∧ y di due elementi x = (x1, x2, x3) ∈ R3 ey = (y1, y2, y3) ∈ R3 e definito come segue
x ∧ y := (x2y3 − x3y2, x3y1 − x1y3, x1y2 − x2y1) ;
nel caso in esame
∂ϕ
∂u∧∂ϕ
∂v=
(∂ϕ2
∂u
∂ϕ3
∂v−∂ϕ3
∂u
∂ϕ2
∂v,∂ϕ3
∂u
∂ϕ1
∂v−∂ϕ1
∂u
∂ϕ3
∂v,∂ϕ1
∂u
∂ϕ2
∂v−∂ϕ2
∂u
∂ϕ1
∂v
).

418 Capitolo 14: Curve, campi vettoriali e superfici
Si consideri ora una superfice regolare compatta ϕ : K → R3 e sia A unsottoinsieme aperto di R3 tale che ϕ(K) ⊂ A.
Se f : A → R e una funzione continua, si puo definire l’integralesuperficiale di f come segue
∫
ϕf dσ :=
∫∫
Kf(ϕ(u, v))
∥∥∥∥∂ϕ
∂u(u, v) ∧ ∂ϕ
∂v(u, v)
∥∥∥∥ du dv . (14.3.3)
Analogamente, se F : K → R3 e un campo vettoriale, si puo definire ilflusso di F ponendo∫
ϕF · ν dσ :=
∫∫
K
(F (ϕ(u, v))
∣∣∣∂ϕ
∂u(u, v) ∧ ∂ϕ
∂v(u, v)
)du dv . (14.3.4)
Le proprieta generali dell’integrale superficiale e del flusso possono essereottenute in maniera simile a quanto gia svolto per gli integrali curvilinei diuna funzione e di un campo vettoriale e per brevita vengono omesse.
14.4 Il teorema della divergenza e la formuladi Stokes
Sia D un sottoinsieme di R2 chiuso, limitato e connesso e tale che (D) = D.
Si dice che D e regolare se la sua frontiera e localmente il grafico di unacurva regolare; cio significa che, per ogni x0 ∈ ∂D, esistono δ > 0 ed unacurva regolare ϕ : I → R2 tale che ϕ∗ = ∂D ∩Bδ(x0).
Teorema 14.4.1 (Teorema della divergenza in R2)Sia D un dominio regolare di R2 e sia F : D → R2 un campo vettoriale di
classe C1(D). Denotato con ν il versore normale esterno al dominio D, si
ha4 ∫∫
DdivF (x, y) dx dy =
∫
∂D(F |ν) ds .
Teorema 14.4.2 (Formula di Stokes in R2)Sia D un dominio regolare di R2 e sia F : D → R2 un campo vettoriale di
classe C1(D). Denotato con ν il versore normale esterno al dominio D, si
ha ∫
+∂DF · dℓ =
∫∫
D
(∂F2
∂x(x, y)− ∂F1
∂y(x, y)
)dx dy .
In R3 valgono i seguenti risultati analoghi.4Si ricorda che
divF (x, y) :=∂F1
∂x(x, y) +
∂F2
∂y(x, y) .
Capitolo 15
Equazioni differenzialiordinarie
15.1 Introduzione e problema di Cauchy
Un’equazione differenziale ordinaria si presenta nella forma
F (x, y(x), y′(x), . . . , y(m)(x)) = 0
con F : Ω→ R definita in un sottoinsieme Ω di Rm+2 ed esprime una relazio-ne tra la variabile indipendente x ed il valore in x di una funzione incognitae di quello delle sue derivate fino ad un certo ordine. L’ordine piu grande mdelle derivate coinvolte nell’equazione differenziale viene denominato ordinedell’equazione differenziale.
Lo studio di innumerevoli problemi in tutti i settori scientifici conducead equazioni differenziali e l’obiettivo e quello di determinarne le possibilisoluzioni , cioe le funzioni u : I → R definite in un intervallo I di R cheverificano le seguenti condizioni
1. u e derivabile m volte in I;
2. per ogni x ∈ I, si ha (x, u(x), u′(x), . . . , u(m)(x)) ∈ Ω;
3. per ogni x ∈ I, si ha F (x, u(x), u′(x), . . . , u(m)(x)) = 0.
In diverse circostanze, viene richiesto che piu equazioni differenziali sianosoddisfatte simultaneamente ed in questi casi la soluzione puo essere unafunzione vettoriale in cui ogni componente soddisfa un’assegnata equazione

420 Capitolo 15: Equazioni differenziali ordinarie
differenziale. Un’equazione differenziale vettoriale si presenta quindi nellaforma
F (x, y(x), y′(x), . . . , y(m)(x)) = 0
con F : Ω → Rn definita in un sottoinsieme Ω di R(m+1)n+1 in quanto lefunzioni incognite y = (y1, . . . , yn) sono a valori in Rn. Quindi la funzioneF e a valori in Rn e, denotate con F1, . . . , Fn : Ω → R le sue componenti,l’equazione differenziale puo essere scritta nella seguente forma di un sistemadi n equazioni differenziali
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
F1(x, y(x), y′(x), . . . , y(m)(x)) = 0 ,F2(x, y(x), y′(x), . . . , y(m)(x)) = 0 ,...Fn(x, y(x), y′(x), . . . , y(m)(x)) = 0 .
In questo caso una soluzione e una funzione u : I → Rn definita inun intervallo I di R (quindi u = (u1, . . . , un) con u1, . . . , un : I → R) cheverifica le seguenti condizioni
1. u e derivabile m volte in I (cioe, u1, . . . , un sono derivabili m volte inI);
2. per ogni x ∈ I, si ha (x, u(x), u′(x), . . . , u(m)(x)) ∈ Ω (cioe
(x, u1(x), . . . , un(x), u′1(x), . . . , u
′n(x), . . . , u
(m)1 (x), . . . , u(m)
n (x)) ∈ Ω );
3. per ogni x ∈ I, si ha F (x, u(x), u′(x), . . . , u(m)(x)) = 0 (cioe
F (x, u1(x), . . . , un(x), u′1(x), . . . , u
′n(x), . . . , u
(m)1 (x), . . . , u(m)
n (x)) = 0 ).
L’ultima equazione puo essere espressa in maniera equivalente sottoforma di un sistema di equazioni differenziali⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
F1(x, u1(x), . . . , un(x), u′1(x), . . . , u
′n(x), . . . , u
(m)1 (x), . . . , u(m)
n (x)) = 0 ,
F2(x, u1(x), . . . , un(x), u′1(x), . . . , u
′n(x), . . . , u
(m)1 (x), . . . , u(m)
n (x)) = 0 ,...
Fn(x, u1(x), . . . , un(x), u′1(x), . . . , u
′n(x), . . . , u
(m)1 (x), . . . , u(m)
n (x)) = 0 .
Nel seguito si cerchera di tenere conto di tali esigenze e pertanto verrannoprese in considerazione equazioni differenziali in cui le funzioni incognitesono funzioni vettoriali.
Piu in generale, un’equazione differenziale potrebbe esprimere una rela-zione in cui sono coinvolte le derivate parziali di una funzione di piu variabili;

15.1 Introduzione e problema di Cauchy 421
queste equazioni differenziali vengono denominate a derivate parziali ed illoro studio richiede degli strumenti specifici che esulano da una trattazioneintroduttiva. Ci si limitera pertanto a considerare equazioni differenzialiordinarie in cui la funzione incognita dipende da una sola variabile.
Per applicare diversi risultati riguardanti l’esistenza e l’unicita della so-luzione, e opportuno riuscire ad esplicitare le derivate di ordine massimo escrivere l’equazione differenziale in forma normale
y(m) = f(x, y, y′, . . . , ym−1) (15.1.1)
con f : A→ Rn definita in un sottoinsieme A di Rm·n+1.La funzione f viene denominata secondo membro dell’equazione diffe-
renziale (15.1.1).Nella relazione precedente si e usata la convenzione universalmente adot-
tata di denotare con y, . . . y(m) i valori incogniti y(x), . . . y(m)(x) in x. De-notate con f1 . . . , fn : A → R le componenti di f si ha quindi il seguentesistema di n equazioni differenziali
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
y(m)1 = f1(x, y1, . . . , yn, y′1, . . . , y
′n, . . . , y
m−11 , . . . , ym−1
n ) ,
y(m)2 = f2(x, y1, . . . , yn, y′1, . . . , y
′n, . . . , y
m−11 , . . . , ym−1
n ) ,...
y(m)n = fn(x, y1, . . . , yn, y′1, . . . , y
′n, . . . , y
m−11 , . . . , ym−1
n ) .
(15.1.2)
Assegnato un punto (x0, y0, y′0 . . . , y(m−1)0 ) ∈ A (si osservi che
y0 ∈ Rn , y′0 ∈ Rn , . . . , y(m−1)0 ∈ Rn )
il problema di Cauchy per l’equazione differenziale (15.1.1)
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
y(m) = f(x, y, y′, . . . , ym−1) ,y(x0) = y0 ,y′(x0) = y′0 ,...
y(m−1)(x0) = y(m−1)0 ,
consiste nel determinare una soluzione u : I → Rn dell’equazione differen-ziale (15.1.1) tale che
1. x0 ∈ I;
2. u(x0) = y0, u′(x0) = y′0, . . . , u(m−1)(x0) = y(m−1)
0 .

422 Capitolo 15: Equazioni differenziali ordinarie
Con riferimento al sistema di equazioni differenziali (15.1.2), il problemadi Cauchy si scrive come segue
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
y(m)1 = f1(x, y1, . . . , yn, y′1, . . . , y
′n, . . . , y
m−11 , . . . , ym−1
n ) ,
y(m)2 = f2(x, y1, . . . , yn, y′1, . . . , y
′n, . . . , y
m−11 , . . . , ym−1
n ) ,...
y(m)n = fn(x, y1, . . . , yn, y′1, . . . , y
′n, . . . , y
m−11 , . . . , ym−1
n ) ,(y1(x0), . . . , yn(x0)) = y0 ,...
(y(m−1)1 (x0), . . . , y
(m−1)n (x0)) = y(m−1)
0 ,
e consiste nel determinare una soluzione u := (u1, . . . , un) : I → Rn delsistema di equazioni differenziali (15.1.2) tale che
1. x0 ∈ I;
2. (u1(x0), . . . , un(x0)) = y0;
(u′1(x0), . . . , u′
n(x0)) = y′0;
...
(u(m−1)1 (x0), . . . , u
(m−1)n (x0)) = y(m−1)
0 .
Si riconosce ora che un’equazione differenziale di ordine m puo esserericondotta ad un sistema di m equazioni differenziali del primo ordine.
Proposizione 15.1.1 Sia f : A → Rn una funzione definita in un sot-toinsieme A di Rm·n+1 e si consideri l’equazione differenziale in formanormale
y(m) = f(x, y, y′, . . . , ym−1) . (15.1.3)
Si considerino ora le funzioni g1, . . . , gm : A → Rn definite ponendo, perogni (x, z1, z2, . . . , zm) ∈ A (quindi zi ∈ Rn per ogni i = 1, . . . ,m),
g1(x, z1, z2, . . . , zm) := z2 ,g2(x, z1, z2, . . . , zm) := z3 ,
...gm−1(x, z1, z2, . . . , zm) := zm ,gm(x, z1, z2, . . . , zm) := f(x, z1, z2, . . . , zm) ,

15.1 Introduzione e problema di Cauchy 423
ed il sistema di m equazioni differenziali del primo ordine
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
z′1 = g1(x, z1, z2, . . . , zm) ,z′2 = g2(x, z1, z2, . . . , zm) ,...z′m = gm(x, z1, z2, . . . , zm) .
(15.1.4)
Se u : I → Rn e una soluzione dell’equazione differenziale (15.1.3)allora, posto
z1 := u , z2 := u′ , . . . , zm := u(m−1) ,
si ha che z := (z1, . . . , zm) e soluzione del sistema di equazioni differenziali(15.1.4).
Viceversa, se z := (z1, . . . , zm) e soluzione del sistema del sistema diequazioni differenziali (15.1.4), allora u := z1 e soluzione dell’equazionedifferenziale (15.1.3).
Infine, se (x0, y0, y′0, . . . , y(m−1)0 ) ∈ A, la soluzione u dell’equazione dif-
ferenziale (15.1.3) soddisfa le condizioni iniziali
u(x0) = y0 , u′(x0) = y′0 , . . . , u(m−1)(x0) = y(m−1)0 ,
se e solo se la corrispondente soluzione z = (z1, . . . , zm) del sistema diequazioni differenziali (15.1.4) soddisfa la condizione iniziale z′(x0) = z0con z0 := (y0, y′0, . . . , y
(m−1)0 ).
Dimostrazione. La dimostrazione e immediata tenendo presente che, dalla definizione
di g1, . . . , gm, le equazioni del sistema di equazioni differenziali considerato si ottengono
imponendo che le m variabili z1 = y, y′ = z2, . . . , y(m−1) = zm siano ognuna la derivata
della precedente e inoltre che la derivata di zm (cioe z′m = (y(m−1))′ = y(m) coincida con
f(x, y, y′, . . . , ym−1) = gm(x, z1, z2, . . . , zm). Anche la verifica delle condizioni iniziali
segue direttamente dalle definizioni adottate. #
A questo punto si puo anche riconoscere che un sistema di equazionidifferenziali composto da n equazioni del primo ordine si puo ricondurre adun’unica equazione differenziale del primo ordine vettoriale a valori in Rn.
Proposizione 15.1.2 Siano f1, . . . , fn : A → R definite in un sottoinsie-me A di Rn+1 e si consideri la funzione f := (f1, . . . , fn) : A → Rn dicomponenti f1, . . . , fn.

424 Capitolo 15: Equazioni differenziali ordinarie
Allora, una funzione u := (u1, . . . , un) : I → Rn e una soluzione delsistema di n equazioni differenziali del primo ordine
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
y′1 = f1(x, y1, . . . , yn) ,y′2 = f2(x, y1, . . . , yn) ,...y′n = fn(x, y1, . . . , yn) ,
(15.1.5)
se e solo se essa e una soluzione dell’equazione differenziale vettoriale
y′ = f(x, y) , y := (y1, . . . , yn) . (15.1.6)
Inoltre, se (x0, y0,1, . . . , y0,n) ∈ A, la funzione u considerata come so-luzione del sistema di equazioni differenziali (15.1.3) soddisfa le condizioniiniziali
u1(x0) = y0,1 , , . . . , un(x0) = y0,n ,
se e solo se soddisfa la condizione iniziale u(x0) = y0 come soluzione dell’e-quazione differenziale (15.1.6) (si e posto per comodita y0 := (y0,1, . . . , y0,n)).
Dimostrazione. Anche in questo caso la dimostrazione e immediata in base alle defini-
zioni adottate. #
Pertanto, in base alle proposizioni precedenti, non sara restrittivo con-siderare nel seguito equazioni differenziali del primo ordine (vettoriali) informa normale del tipo
y′ = f(x, y) (15.1.7)
con f : A→ Rn definita in un sottoinsieme A ⊂ R×Rn (la scrittura R×Rn
al posto di Rn+1 mette in evidenza il fatto che la variabile x e un numeroreale mentre y e una variabile vettoriale in Rn).
In base alle definizioni adottate, una soluzione dell’equazione differen-ziale (15.1.7) e una funzione u : I → Rn definita in un intervallo I di R chesoddisfa le seguenti condizioni
1. u e derivabile in I;
2. per ogni x ∈ I si ha (x, u(x)) ∈ A;
3. per ogni x ∈ I si ha u′(x) = f(x, u(x)).
Assegnato (x0, y0) ∈ A, il problema di Cauchy per l’equazione differen-ziale (15.1.7)
y′ = f(x, y) ,y(x0) = y0 ,
(15.1.8)
consiste nel determinare una soluzione u : I → Rn dell’equazione differen-ziale (15.1.7) che verifica le ulteriori condizioni

15.1 Introduzione e problema di Cauchy 425
1. x0 ∈ I;
2. u(x0) = y0.
La proposizione successiva mette in relazione le soluzioni del problemadi Cauchy con quelle di un’opportuna equazione integrale.
Si precisa che, se u : I → Rn e una funzione vettoriale continua, cioe lesue componenti u1, . . . , un : I → R sono funzioni reali continue e se a, b ∈ I,si pone ∫ b
au(x) dx :=
(∫ b
au1(x) dx, . . . ,
∫ b
aun(x) dx
).
Proposizione 15.1.3 Siano A ⊂ R × Rn, f : A → Rn una funzionecontinua ed (x0, y0) ∈ A.
Se u : I → Rn e una funzione continua in un intervallo I e tale che,per ogni x ∈ I, si abbia (x, u(x)) ∈ A, allora le seguenti proposizioni sonoequivalenti
a) u e soluzione del problema di Cauchy
y′ = f(x, y) ,y(x0) = y0 ;
b) u soddisfa la seguente equazione integrale, per ogni x ∈ I,
u(x) = y0 +
∫ x
x0
f(t, u(t)) dt . (15.1.9)
Dimostrazione. Si supponga che u sia soluzione del problema di Cauchy. Allora ue derivabile ed inoltre, poiche per ogni x ∈ I, u′(x) = f(x, u(x)) e sia u che f sonocontinue, si ha che u′ e continua. Conseguentemente, per ogni x ∈ I,
u(x) = u(x0) +
∫ x
x0
u′(t) dt = y0 +
∫ x
x0
f(t, u(t)) dt .
Viceversa, si supponga che u soddisfi l’equazione integrale (15.1.9). Poiche u e continua,
la funzione g : I → R definita ponendo, per ogni x ∈ I, g(x) := f(x, u(x)), e anch’essa
continua e conseguentemente la sua funzione integrale di punto iniziale x0 (cioe la funzione
x 4→∫ xx0
g(t) dt) e una primitiva di g per cui e derivabile; dalla (15.1.9) si deduce che
anche u deve essere derivabile (infatti, per ogni x ∈ I, risulta u(x) = y0 +∫ xx0
g(t) dt) e
inoltre u′(x) = g(x) = f(x, u(x)) da cui la tesi. #
L’equazione integrale (15.1.9) viene denominata equazione integrale diVolterra ed il problema di determinarne una soluzione viene spesso indicatocome problema di Liouville.
Al fine di utilizzare la Proposizione 15.1.3 precedente per ottenere l’esi-stenza di soluzioni dell’equazione differenziale y′ = f(x, y), l’ipotesi di con-tinuita del secondo membro f dell’equazione differenziale verra usualmenterichiesta in tutti i risultati successivi.

426 Capitolo 15: Equazioni differenziali ordinarie
15.2 Unicita della soluzione del problema diCauchy
Lo studio dell’unicita delle soluzioni del problema di Cauchy e basato sulseguente risultato, noto come lemma di Gronwall .
Proposizione 15.2.1 (Lemma di Gronwall)Sia w : I → R una funzione reale continua e positiva in un intervallo I e sisupponga che esistano x0 ∈ I ed L > 0 tali che, per ogni x ∈ I,
w(x) ≤ L
∣∣∣∣∫ x
x0
w(t) dt
∣∣∣∣ .
Allora w = 0.Dimostrazione. Sia ε > 0 e si consideri la funzione vε : I ∩ [x0,+∞[→ R definitaponendo, per ogni x ∈ I ∩ [x0,+∞[
vε(x) := ε+ L
∫ x
x0
w(t) dt .
Allora vε e derivabile in quanto w e continua ed inoltre, per ogni x ∈ I ∩ [x0,+∞[, si havε(x) > 0 e, dalle ipotesi assunte,
v′ε(x)
vε(x)= L
w(x)
ε+ L∫ xx0
w(t) dt≤ L
L∫ xx0
w(t) dt
ε+ L∫ xx0
w(t) dt≤ L .
Dalla proprieta di monotonia dell’integrale segue, per ogni x ∈ I,∫ x
x0
v′ε(t)
vε(t)dt ≤ L
∫ x
x0
dt = L(x− x0) ,
e quindi, poiche ∫ x
x0
v′ε(t)
vε(t)dt = log
vε(x)
vε(x0),
si havε(x) ≤ vε(x0) e
L(x−x0) = ε eL(x−x0) .
Essendo, per ipotesi, w(x) ≤ vε(x), risulta anche w(x) ≤ ε eL(x−x0) e dall’arbitrarieta diε > 0, si ottiene w(x) = 0.
Nell’intervallo I∩]−∞, x0] si procede in maniera analoga oppure applicando quanto
gia dimostrato alla funzione w(x) := w(x0 − x). #
Al fine di applicare il lemma di Gronwall per l’unicita della soluzione delproblema di Cauchy, si definiscono ulteriori proprieta del secondo membrodi un’equazione differenziale.
Si considerino un sottoinsieme A ⊂ R×Rn ed una funzione f : A→ Rn.Si dice che f e lipschitziana rispetto alla seconda variabile se esiste una
costante L > 0 tale che
∀ (x, y) ∈ A ∀ (x, z) ∈ A : ∥f(x, y)− f(x, z)∥ ≤ L ∥y − z∥ . (15.2.1)

15.2 Unicita della soluzione del problema di Cauchy 427
La costante L > 0 viene anche denominata costante di Lipschitz rispettoalla seconda variabile di f e per evidenziare cio si dice anche che f e L-lipschitziana rispetto alla seconda variabile.1
Si puo stabilire a questo il seguente risultato di unicita della soluzionedel problema di Cauchy.
Teorema 15.2.2 (Teorema di unicita)Siano A ⊂ R × Rn, f : A → Rn una funzione continua ed L-lipschitzianarispetto alla seconda variabile ed (x0, y0) ∈ A.
Se u1 : I1 → Rn e u2 : I2 → Rn sono soluzioni del problema di Cauchy
y′ = f(x, y) ,y(x0) = y0 ,
allora, per ogni x ∈ I1 ∩ I2, risulta u1(x) = u2(x).
Dimostrazione. Si ponga I := I1 ∩ I2 e si consideri la funzione w : I → R definitaponendo, per ogni x ∈ I,
w(x) = ∥u1(x)− u2(x)∥ .
Allora w e continua e positiva e inoltre dalla continuita di f si ottiene, per ogni x ∈ I,
w(x) = ∥u1(x)− u2(x)∥ =
∥∥∥∥∫ x
x0
(u′1(t)− u′
2(t)) dt
∥∥∥∥ ≤∣∣∣∣∫ x
x0
∥u′1(t)− u′
2(t)∥ dt∣∣∣∣
=
∣∣∣∣∫ x
x0
∥f(t, u1(t))− f(t, u2(t))∥ dt∣∣∣∣ ≤ L
∣∣∣∣∫ x
x0
∥u1(t)− u2(t)∥ dt∣∣∣∣
= L
∣∣∣∣∫ x
x0
w(t) dt
∣∣∣∣ .
Dal lemma di Gronwall (Proposizione 15.2.1) segue allora w = 0 e conseguentemente
u1 = u2 in I. #
Osservazione 15.2.3 Le ipotesi del risultato precedente assicurano la va-lidita dell’unicita in grande cioe l’uguaglianza di due soluzioni dello stessoproblema di Cauchy in tutti i punti in cui esse sono entrambe definite.
1La definizione adottata e basata sulla definizione generale di funzione lipschitziana.Se E ed F sono spazi normati ed f : A → F e una funzione definita in un sottoinsieme Adi E, si dice che f e lipschitziana se esiste una costante L > 0 tale che, per ogni x, y ∈ A,risulti
∥f(x)− f(y)∥ ≤ L ∥x− y∥ .
Il numero L viene denominato costante di Lipschitz di f ed f viene anche denominatafunzione L-lipschitziana.
Pertanto, f e lipschitziana se tutti i rapporti incrementali
∥f(x)− f(y)∥∥x− y∥
, x, y ∈ A , x = y ,
sono limitati ed in questo caso l’estremo superiore di tali rapporti incrementali risultaessere una costante di Lipschitz per f .

428 Capitolo 15: Equazioni differenziali ordinarie
Si supponga ora che valga la proprieta di unicita in piccolo, cioe chef : A→ R sia una funzione continua definita in A ⊂ R×Rn e che, per ogni(x0, y0) ∈ A e per ogni u1 : I1 → Rn e u2 : I2 → Rn soluzioni del problemadi Cauchy
y′ = f(x, y) ,y(x0) = y0 ,
esista un intorno J di x0 tale che, per ogni x ∈ J ∩ I1 ∩ I2, risulti u1(x) =u2(x).
Si riconosce allora che vale anche la proprieta di unicita in grande.
Infatti, siano u1 : I1 → Rn e u2 : I2 → Rn soluzioni dello stesso problema di Cauchy
y′ = f(x, y) ,y(x0) = y0 ,
e si consideri l’insieme U := x ∈ I1 ∩ I2 | u1(x) = u2(x). Allora U = ∅ in quantox0 ∈ I; inoltre U e chiuso in I1 ∩ I2 in quanto u1 e u2 sono funzioni continue. Infine siriconosce che U e anche aperto in I1∩I2; infatti, se x1 ∈ U , posto y1 := u1(x1) = u2(x1),si puo considerare il problema di Cauchy
y′ = f(x, y) ,y(x1) = y1 ,
ed u1 ed u2 sono due sue soluzioni; dalla proprieta di unicita locale segue allora che
u1 = u2 in un intorno J ∩ I1 ∩ I2 di x1 in I1 ∩ I2. Poiche I1 ∩ I2 e un intervallo ed U
e un suo sottoinsieme non vuoto contemporaneamente chiuso ed aperto in I1 ∩ I2, deve
essere U = I1 ∩ I2, da cui u1 = u2 in I1 ∩ I2.
Dall’Osservazione 15.2.3 precedente segue che il teorema di unicita puoessere ottenuto anche assicurando l’unicita locale della soluzione con ipotesiquindi locali sulla funzione f .
Si introduce quindi la seguente definizione di funzione localmente lip-schitziana rispetto alla seconda variabile.
Si considerino un sottoinsieme A ⊂ R×Rn ed una funzione f : A→ Rn.Si dice che f e localmente lipschitziana rispetto alla seconda variabile se,
per ogni (x0, y0) ∈ A, esistono δ > 0, r > 0 ed una costante L > 0 tali che,per ogni (x, y) ∈ A ∩ (]x0 − δ, x0 + δ[×Br(y0)) e (x, z) ∈ A ∩ (]x0 − δ, x0 +δ[×Br(y0)), si abbia
∥f(x, y)− f(x, z)∥ ≤ L ∥y − z∥ . (15.2.2)
Da quanto osservato si ottiene allora il seguente ulteriore teorema diunicita.
Teorema 15.2.4 (Teorema di unicita nel caso localmente lipschi-tziano rispetto alla seconda variabile)

15.2 Unicita della soluzione del problema di Cauchy 429
Siano A ⊂ R × Rn, f : A → Rn una funzione continua e localmentelipschitziana rispetto alla seconda variabile ed (x0, y0) ∈ A.
Se u1 : I1 → Rn e u2 : I2 → Rn sono soluzioni del problema di Cauchy
y′ = f(x, y) ,y(x0) = y0 ,
allora, per ogni x ∈ I1 ∩ I2, risulta u1(x) = u2(x).
Per verificare la condizione di locale lipschitzianeita rispetto alla secondavariabile, si puo usare il fatto che tale condizione equivale alla limitatezzalocale dei rapporti incrementali relativi alla seconda variabile di f ; per-tanto, se f e derivabile parzialmente rispetto alla seconda variabile y (cioerispetto alle variabili y1, . . . , yn se n > 1) e se derivate parziali rispetto atali variabili sono continue in A, allora i rapporti incrementali relativi allaseconda variabile risultano localmente limitati e quindi la funzione risultaessere localmente lipschitziana rispetto alla seconda variabile.
Un’altra questione legata all’unicita della soluzione del problema di Cau-chy e la possibilita di prolungare le soluzioni ottenendo soluzioni massimali,che non possono essere cioe ulteriormente prolungate.
Siano A ⊂ R×Rn ed f : A→ Rn una funzione continua. Se u1 : I1 → Rn
e u2 : I2 → Rn sono soluzioni dell’equazione differenziale y′ = f(x, y),si dice che u2 e un prolungamento di u1 se I1 ⊂ I2 e, per ogni x ∈ I1,risulta u2(x) = u1(x) (in effetti, la nozione di prolungamento puo esserefornita anche nel caso in cui u1 ed u2 non siano necessariamente soluzionidi un’equazione differenziale).
Inoltre, si dice che una soluzione u : I → Rn di y′ = f(x, y) e massimalese essa non ammette alcun prolungamento u : I → Rn che sia ancora una so-luzione di y′ = f(x, y) e definito in un intervallo I contenente propriamenteI.
Si osserva che se u1 : I1 → Rn e u2 : I2 → Rn sono soluzioni dell’e-quazione differenziale y′ = f(x, y) che coincidono in I1 ∩ I2, allora, postoI := I1 ∪ I2, si puo definire la funzione u : I → Rn ponendo, per ogni x ∈ I,
u(x) :=
u1(x) , x ∈ I1 ,u2(x) , x ∈ I2 .
Osservato che la funzione u e derivabile in I in quanto, se x ∈ I1∩I2, risultau′1(x) = f(x, u1(x)) = f(x, u2(x)) = u′
2(x), si ottiene che u e ancora unasoluzione dell’equazione differenziale.
Pertanto, nelle ipotesi in cui valga l’unicita della soluzione, si puo affer-mare che ogni soluzione u : I → Rn di y′ = f(x, y) ammette un prolun-gamento massimale, cioe esiste un prolungamento u : I → Rn di u che e

430 Capitolo 15: Equazioni differenziali ordinarie
soluzione massimale di y′ = f(x, y) (si osservi che tale risultato non assicural’esistenza di soluzioni, ma solamente il fatto che, assegnata una soluzione,essa possa essere prolungata ad una soluzione massimale).
Infatti, e sufficiente considerare l’insieme P(u) := v : Iv → Rn | v e unprolungamento di u ed e soluzione di y′ = f(x, y) e, posto
I :=⋃
v∈P(u)
Iv ,
definire la funzione u : I → Rn ponendo, per ogni x ∈ I, u(x) := v(x) dovev ∈ P(u) e x ∈ Iv. Allora si verifica direttamente che u e un prolungamentodi u ed e una soluzione massimale di y′ = f(x, y).
Dalla discussione precedente segue che, se A ⊂ R × Rn ed f : A → Rn
e continua e localmente lipschitziana rispetto alla seconda variabile, alloraogni soluzione di y′ = f(x, y) ammette un prolungamento massimale.
In particolare, tale proprieta e verificata se si suppone che f sia deri-vabile parzialmente e con derivate parziali continue rispetto alle variabiliy1, . . . , yn.
Si osservi infine che le soluzioni massimali non devono essere confusecon le soluzioni in grande che sono le soluzioni definite in tutto l’intervalloI := x ∈ R | ∃ y ∈ Rn t.c. (x, y) ∈ A.
15.3 Esistenza della soluzione del problema diCauchy
Per quanto riguarda l’esistenza di soluzioni del problema di Cauchy, i ri-sultati piu importanti sono i seguenti teoremi di esistenza in piccolo ed ingrande.
Teorema 15.3.1 (Teorema di Peano di esistenza di soluzioni in pic-colo)
Siano A ⊂ R× Rn, f : A→ Rn una funzione continua ed (x0, y0) ∈A. Al-
lora esiste un intervallo I tale che x0 ∈I ed esiste una soluzione u : I → Rn
del problema di Cauchy y′ = f(x, y) ,y(x0) = y0 .
Nel teorema precedente non e possibile specificare l’ampiezza dell’inter-vallo in cui esiste una soluzione del problema di Cauchy ne si puo affermareche tale soluzione sia unica. Con l’aggiunta di ulteriori ipotesi sulla funzionef si puo invece ottenere il seguente risultato.

15.3 Esistenza della soluzione del problema di Cauchy 431
Teorema 15.3.2 Siano A := [a, b] × B′r(y0) ed f : A → Rn una fun-
zione continua ed L-lipschitziana rispetto alla seconda variabile e si pon-ga2 M := supx∈[a,b] ∥f(x, y0)∥. Allora, per ogni x0 ∈]a, b[, posto δ1 :=minx0 − a, r/M e δ2 := minb − x0, r/M, esiste una ed sola soluzioneu : [x0 − δ1, x0 + δ2]→ Rn del problema di Cauchy
y′ = f(x, y) ,y(x0) = y0 .
La dimostrazione del risultato precedente e basata sul metodo delle approssimazioni
successive di Peano-Picard.
Dal risultato precedente si deduce il seguente teorema di esistenza ingrande.
Teorema 15.3.3 (Teorema di Cauchy-Lipschitz di esistenza di solu-zioni in grande)Siano A := [a, b] × Rn ed f : A → Rn una funzione continua, limi-tata ed L-lipschitziana rispetto alla seconda variabile. Allora, per ogni(x0, y0) ∈]a, b[×Rn, esiste una ed sola soluzione u : [a, b]→ Rn del problemadi Cauchy
y′ = f(x, y) ,y(x0) = y0 .
Dimostrazione. Si ponga M := supx∈[a,b] ∥f(x, y0)∥ e si consideri r > 0 tale che r >
M(b − a). A questo punto il Teorema 15.3.2 precedente fornisce un’unica soluzione
nell’intervallo [a, b] in quanto risulta δ1 := minx0 − a, r/M = x0 − a e δ2 := minb −x0, r/M = b− x0. #
Conviene osservare che l’ipotesi che l’intervallo [a, b] sia chiuso e limitatopuo essere rimossa considerando un intervallo I arbitrario.
Teorema 15.3.4 Siano I un intervallo di R, A := I × Rn ed f : A →Rn una funzione continua e tale che, per ogni intervallo [a, b] ⊂ I, la suarestrizione ad [a, b] × Rn sia lipschitziana rispetto alla seconda variabile.
Allora, per ogni (x0, y0) ∈I × Rn, esiste una ed sola soluzione u : I → Rn
del problema di Cauchy y′ = f(x, y) ,y(x0) = y0 .
Dimostrazione. Infatti, dal Teorema 15.3.3, per ogni [a, b] ⊂ I tale che x0 ∈]a, b[, esisteuna ed una sola soluzione u : [a, b] → Rn del problema di Cauchy assegnato. Si consideri
ora una successione crescente (Jn)n∈N di intervalli chiusi e limitati tali che x0 sia interno
2La funzione f e limitata per il teorema di Weierstrass, essendo continua in un insiemechiuso e limitato.

432 Capitolo 15: Equazioni differenziali ordinarie
a ciascuno di essi e tale che l’unione sia coincida con I. Per ogni n ∈ N, si denoti conun : Jn → Rn l’unica soluzione nell’intervallo Jn del problema di Cauchy assegnato. Si
riconosce allora facilmente che la funzione u : I → Rn definita ponendo, per ogni x ∈ I,
u(x) := un(x) dove n ∈ N e tale che x ∈ Jn e ben definita ed e l’unica soluzione del
problema di Cauchy assegnato definita in I. #
15.4 Equazioni differenziali lineari
Sia I un intervallo di R e si considerino n+1 funzioni a0, . . . , an : I → R conan(x) = 0 per ogni x ∈ I ed un’ulteriore funzione f : I → R. Si consideril’equazione differenziale di ordine n
an(x) y(n) + an−1(x) y
(n−1) + · · ·+ a1(x) y′ + a0(x) y = f(x) . (15.4.1)
essa viene denominata equazione differenziale lineare di ordine n con coef-ficienti a0, . . . , an e termine noto f .
Se f = 0, l’equazione (15.4.1) viene denominata omogenea, mentre sef = 0, essa viene denominata completa.
Poiche an assume valori sempre diversi da 0, si puo dividere primo esecondo membro per an(x) ed ottenere la (15.4.1) in forma normale.
Non e pertanto restrittivo supporre an(x) = 1 e considerare l’equazionedifferenziale lineare in forma normale
y(n) + an−1(x) y(n−1) + · · ·+ a1(x) y
′ + a0(x) y = f(x) . (15.4.2)
Una soluzione u : J → Rn dell’equazione differenziale (15.4.2) e pertantouna funzione derivabile n volte in un intervallo J ⊂ I e tale che, per ognix ∈ J , si abbia
u(n)(x) + an−1(x)u(n−1)(x) + · · ·+ a1(x)u
′(x) + a0(x)u(x) = f(x) .
Il problema di Cauchy per l’equazione differenziale lineare (15.4.2) si
ottiene considerando x0 ∈ I ed una n-pla (y0, y′0, . . . , y(n−1)0 ) ∈ Rn e le
condizioni⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
y(n) + an−1(x) y(n−1) + · · ·+ a1(x) y′ + a0(x) y = f(x) ,y(x0) = y0 ,y′(x0) = y′0 ,...
y(n−1)(x0) = y(n−1)0 .
(15.4.3)
In questo caso una soluzione u : J → Rn del problema di Cauchy (15.4.3) euna soluzione dell’equazione differenziale (15.4.2) tale che x0 ∈ J ed inoltre
u(x0) = y0 , u′(x0) = y′0 , . . . , u(n−1)(x0) = y(n−1)0 .

15.4 Equazioni differenziali lineari 433
Per studiare l’esistenza e l’unicita della soluzione del problema di Cau-chy, nel seguito si supporra che le funzioni an−1, . . . , a1, a0 ed f sianocontinue in I.
Si e visto in precedenza che le equazioni differenziali di ordine n possonoessere ricondotte ad un sistema di n equazioni differenziali del primo ordineche nel caso dell’equazione differenziale (15.4.2) e il seguente
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
y′1 = y2 ,y′2 = y3 ,...y′n−1 = yn ,y′n = −an−1(x) yn − · · ·− a1(x) y2 − a0(x) y1 + f(x) ,
Inoltre, il problema di Cauchy (15.4.3) si ottiene imponendo le ulterioricondizioni
y1(x0) = y0 , y2(x0) = y′0 , . . . , yn(x0) = y(n−1)0 .
Infine, il sistema precedente puo essere espresso come un’unica equa-zione differenziale del primo ordine (vettoriale) y′ = g(x, y) dove il secon-do membro e la funzione g : I × Rn → Rn definita ponendo, per ogni(x, y1, . . . , yn) ∈ I × Rn,
g(x, y1, . . . , yn) := (y2, y3, . . . , yn,−an−1(x)yn−· · ·−a1(x)y2−a0(x)y1+f(x)) .
Quindi le componenti di g sono date dalle funzioni g1, . . . , gn : I ×Rn → Rdefinite ponendo, per ogni (x, y1, . . . , yn) ∈ I × Rn,
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
g1(x, y1, . . . , yn) := y2 ,g2(x, y1, . . . , yn) := y3 ,...gn−1(x, y1, . . . , yn) := yn ,gn(x, y1, . . . , yn) := −an−1(x) yn − · · ·− a1(x) y2 − a0(x) y1 + f(x) .
Si dimostra ora che la funzione g verifica le ipotesi del Teorema 15.3.4.Infatti, g e ovviamente continua ed inoltre, considerato un intervallo chiusoe limitato [a, b] ⊂ I e posto
M := maxx∈[a,b]
max|a0(x)|, . . . , |an−1(x)| ,
(tale massimo esiste per il teorema di Weierstrass, essendo i coefficienti ed iltermine noto continui nell’intervallo chiuso e limitato [a, b]), si ha, per ogni

434 Capitolo 15: Equazioni differenziali ordinarie
x ∈ [a, b], y = (y1, . . . , yn) ∈ Rn e z = (z1, . . . , zn) ∈ Rn,
∥g(x, y)− g(x, z)∥2 = |g1(x, y)− g1(x, z)|2 + . . .
+|gn−1(x, y)− gn−1(x, z)|2 + |gn(x, y)− gn(x, z)|2
= (y2 − z2)2 + · · ·+ (yn − zn)
2
+∣∣an−1(x) (yn − zn) + . . .
+a1(x) (y2 − z2) + a0(x) (y1 − z1)∣∣2
≤ ∥y − z∥2 +M2(|yn − zn|+ . . .
+|y2 − z2|+ |y1 − z1|)2
≤ ∥y − z∥2 + n2M2 ∥y − z∥2
= (1 + n2M2) ∥y − z∥2 ,
da cui ∥g(x, y) − g(x, z)∥ ≤√1 + n2M2 ∥y − z∥. Quindi g e lipschitziana
rispetto alla seconda variabile in [a, b]× Rn.Conseguentemente, tenendo conto delle Proposizioni 15.1.2 e 15.1.1, esi-
ste sempre una ed una sola soluzione del problema di Cauchy (15.4.3) e talesoluzione e definita in tutto l’intervallo I.
Si studia ora come determinare le soluzioni dell’equazione differenzialelineare (15.4.2).
Si considera innanzitutto l’equazione omogenea
y(n) + an−1(x) y(n−1) + · · ·+ a1(x) y
′ + a0(x) y = 0 , (15.4.4)
ottenuta dalla (15.4.2) e si osserva che l’insieme S delle sue soluzioni e unsottospazio vettoriale di C(I) di dimensione n.
Infatti S e ovviamente un sottospazio vettoriale di C(I). Sia ora x0 ∈I e, per ogni
i = 1, . . . , n, si denoti con ui l’unica soluzione del problema di Cauchy
y(n) + an−1(x) y(n−1) + · · ·+ a1(x) y′ + a0(x) y = 0 ,(y(x0), y′(x0), . . . , y(n−1)(x0)) = ei .
Si riconosce ora che le soluzioni u1, . . . , un sono linearmente indipendenti.Infatti, se c1, . . . , cn ∈ R e
∑ni=1 ciui = 0, anche per le combinazioni lineari delle
derivate si ha
n∑
i=1
ciu(j−1)i = Dj−1
(n∑
i=1
ciui
)= 0 , j = 1, . . . , n ,
e calcolandole in x0 si ottiene, per ogni j = 1, . . . , n,
n∑
i=1
ciu(j−1)i (x0) = cj
da cui cj = 0.

15.4 Equazioni differenziali lineari 435
Infine, considerata u ∈ S e posto
c1 := u(x0) , c2 := u′(x0) , . . . , cn := u(n−1)(x0) ,
dall’unicita della soluzione del problema di Cauchy segue u =∑n
i=1 ciui (infatti le due
soluzioni verificano le stesse condizioni iniziali in x0). Quindi le funzioni u1, . . . , un
costituiscono una base di S e cio completa la dimostrazione.
Per determinare tutte le soluzioni dell’equazione differenziale omogenea(15.4.4), e quindi sufficiente trovare n soluzioni linearmente indipendentiu1, . . . , un. La soluzione generale della (15.4.4) sara data da
y = c1u1 + · · ·+ cnun , c1, . . . , cn ∈ R .
Assegnate n soluzioni u1, . . . , un della (15.4.4), si considera il WronskianoW : I → R definito ponendo, per ogni x ∈ I,
W (x) := det
∣∣∣∣∣∣∣∣∣
u1(x) u2(x) . . . un(x)u′1(x) u′
2(x) . . . u′n(x)
......
. . ....
u(n−1)1 (x) u(n−1)
2 (x) . . . u(n−1)n (x)
∣∣∣∣∣∣∣∣∣
= det(ui−1j
)i,j=1,...,n
.
(15.4.5)Il seguente risultato riassume le proprieta piu importanti del wronskiano.
Proposizione 15.4.1 (Teorema del Wronskiano)Siano I un intervallo di R ed a0, . . . , an−1 : I → R funzioni continue e siconsideri l’equazione differenziale lineare omogenea di ordine n
y(n) + an−1(x) y(n−1) + · · ·+ a1(x) y
′ + a0(x) y = 0 .
Se u1, . . . , un : I → R sono sue soluzioni, allora le seguenti proposizionisono equivalenti
a) u1, . . . , un sono linearmente indipendenti;
b) esiste x0 ∈ I tale che W (x0) = 0;
c) per ogni x ∈ I si ha W (x) = 0.
Una volta determinate le soluzioni dell’equazione omogenea (15.4.4),cioe n sue soluzioni indipendenti u1, . . . , un, per risolvere l’equazione com-pleta (15.4.2) e sufficiente trovare una sua soluzione particolare u. Infatti,in tal caso, tutte le soluzioni della (15.4.2) sono date da
y = c1u1 + · · ·+ cnun + u , c1, . . . , cn ∈ R .

436 Capitolo 15: Equazioni differenziali ordinarie
Tuttavia il metodo descritto risulta in generale di difficile applicazionein quanto anche per le equazioni differenziali del secondo ordine non e im-mediato determinare due soluzioni linearmente indipendenti dell’equazioneomogenea.
Nel seguito si considerano alcuni casi in cui si puo determinare facilmentela soluzione generale.
15.4.1 Equazioni differenziali lineari del primo ordine
Siano I un intervallo di R, a, b : I → R funzioni continue e si consideril’equazione differenziale lineare del primo ordine
y′ = a(x) y + b(x) . (15.4.6)
Si verifica direttamente che, denotata con A : I → R una primitiva di a, lafunzione w : I → R definita ponendo, per ogni x ∈ I,
w(x) = eA(x)
e una soluzione dell’equazione omogenea y′ = a(x) y (infatti w e derivabilein I e per ogni x ∈ I si ha w′(x) = A′(x) eA(x) = a(x)w(x)).
Quindi tutte le soluzioni dell’omogenea sono date da
y = cw , c ∈ R .
Inoltre, una soluzione particolare dell’equazione completa (15.4.6) e la fun-zione u : I → R definita ponendo, per ogni x ∈ I,
u(x) = w(x)B(x) ,
dove B : I → R e una primitiva della funzione b(x) · e−A(x) (infatti, u ederivabile in I e, per ogni x ∈ I,
u′(x) = w′(x)B(x) + w(x)B′(x) = a(x)w(x)B(x) + b(x)w(x) e−A(x)
= a(x)u(x) + b(x) eA(x) e−A(x) = a(x)u(x) + b(x) ).
Pertanto, la soluzione generale della (15.4.6) e data data
y = cw + u = w · (c+B) , c ∈ R .
Se x0 ∈ I e y0 ∈ R, si riconosce inoltre direttamente che l’unica soluzionedel problema di Cauchy
y′ = a(x) y + b(x) ,y(x0) = y0 ,
e la funzione u : I → R definita ponendo, per ogni x ∈ I,
u(x) := e∫ xx0
a(t) dt(y0 +
∫ x
x0
b(t) e−∫ tx0
a(s) ds dt
).

15.4 Equazioni differenziali lineari 437
15.4.2 Equazioni differenziali lineari di ordine n a coef-ficienti costanti
Siano a0, . . . , an−1, an ∈ R con an = 0, f : I → R una funzione continua inun intervallo I di R e si consideri l’equazione differenziale lineare di ordinen a coefficienti costanti
an y(n) + an−1 y
(n−1) + · · ·+ a1 y′ + a0 y = f(x) . (15.4.7)
Anche in questo caso per determinarne le soluzioni conviene dapprimaconsiderare l’equazione omogenea
an y(n) + an−1 y
(n−1) + · · ·+ a1 y′ + a0 y = 0 . (15.4.8)
L’equazione precedente viene discussa considerando il polinomio caratteri-stico p : R → R ad essa associato che e definito ponendo, per ogni λ ∈R,
p(λ) := an λn + an−1 λ
n−1 + · · ·+ a1 λ+ a0 =n∑
i=0
ai λi .
Poiche p e un polinomio di grado n, esso ammette esattamente n zeri contatiognuno con la propria molteplicita e poiche i coefficienti di p sono reali, glizeri saranno reali oppure complessi coniugati con la stessa molteplicita.
Ad ogni zero del polinomio caratteristico di molteplicita h ≥ 1 ven-gono fatte corrispondere esattamente h soluzioni linearmente indipendentidell’equazione omogenea (15.4.8) come precisato di seguito:
i) se λ0 ∈ R e uno zero reale di molteplicita h ≥ 1 di p, allora le funzioniu1, . . . , uh : R→ R definite ponendo, per ogni x ∈ R,
u1(x) := eλ0 x , u2(x) := x eλ0 x , . . . , uh(x) := xh−1 eλ0 x
(se h = 1 si considera ovviamente solamente la funzione u1) sonosoluzioni linearmente indipendenti dell’equazione omogenea (15.4.8);
ii) se λ = α + iβ ∈ C con β = 0 e uno zero complesso di molteplicitah ≥ 1 di p, allora anche λ = α − iβ e uno zero di molteplicita h dip e ai due zeri α ± iβ di molteplicita h si fanno corrispondere le 2hsoluzioni linearmente indipendenti u1, . . . , uh, v1, . . . , vh : R→ R della(15.4.8) definite ponendo, per ogni x ∈ R,
u1(x) := eα x cos(β x) , v1(x) := eα x sin(β x) ,u2(x) := x eα x cos(β x) , v2(x) := x eα x sin(β x) ,
......
uh(x) := xh−1 eα x cos(β x) , vh(x) := xh−1 eα x sin(β x)
(se h = 1 si considerano ovviamente solamente le funzioni u1 e v1).

438 Capitolo 15: Equazioni differenziali ordinarie
Applicando il metodo sopra indicato ad ogni zero del polinomio carat-teristico, si ottengono esattamente n soluzioni indipendenti u1, . . . , un del-l’equazione omogenea ed a questo punto la soluzione generale della (15.4.8)e data da
y = c1 u1 + · · ·+ cn un , c1, . . . , cn ∈ R .
Si discute infine la determinazione di una soluzione particolare dell’e-quazione completa (15.4.7). A tale proposito si puo cercare di applicareuno dei due metodi discussi di seguito.
Termine noto particolare
Si supponga che P1 e P2 siano polinomi di grado r e rispettivamente s esiano inoltre α ∈ R e β ∈ R. Si consideri la funzione f : R → R definitaponendo, per ogni x ∈ R,
f(x) := P1(x) eα x cos(β x) + P2(x) e
α x sin(β x) .
Allora, una soluzione particolare dell’equazione differenziale completa
an y(n) + an−1 y
(n−1) + · · ·+ a1 y′ + a0 y = f(x) ,
puo essere cercata nella forma
u(x) := xh (Q1(x) eα x cos(β x) +Q2(x) e
α x sin(β x)) , x ∈ R ,
dove h e la molteplicita di α±iβ come soluzione del polinomio caratteristicoassociato all’equazione omogenea (se α ± iβ non e soluzione del polinomiocaratteristico si pone per convenzione h = 0) e Q1 e Q2 sono entrambipolinomi di grado uguale ad m := maxr, s con coefficienti da determinare.Per determinare i coefficienti di Q1 e Q2 e quindi la soluzione particolare,si procede come segue
1. Si calcolano le derivate u′, . . . , u(n) fino all’ordine n di u;
2. Si sostituiscono u e le sue derivate nell’equazione completa e si imponeche u sia una soluzione dell’equazione completa;
3. Si semplifica primo e secondo membro per eα x;
4. Se β = 0, si ottiene l’uguaglianza di due polinomi di grado m e dalprincipio di uguaglianza dei polinomi, imponendo che i coefficientidei termini dello stesso grado di entrambi i membri siano uguali, siottiene un sistema lineare di m equazioni nelle m incognite costituitedai coefficienti di Q1 (in questo caso Q2 = 0); risolvendo tale sistema,si ottengono i coefficienti di Q1 e quindi la soluzione particolare u;

15.4 Equazioni differenziali lineari 439
5. Se β = 0, si scrivono due equazioni ottenute considerando nella primasolamente i termini con cos(β x) e nella seconda quelli con sin(β x); siottengono due equazioni che prevedono ciascuna l’uguaglianza di duepolinomi di grado m (dopo aver semplificato la prima per cos(β x)e la seconda per sin(β x)); ancora dal principio di uguaglianza deipolinomi, imponendo che i coefficienti dei termini dello stesso gradodi entrambi i membri siano uguali, si ottiene un sistema lineare di 2mequazioni nelle 2m incognite costituite dai coefficienti di Q1 e Q2 = 0;risolvendo tale sistema, si ottengono i coefficienti di Q1 e Q2 e quindila soluzione particolare u.
Il presente metodo si puo applicare anche nel caso in cui il termine notosia somma di due funzioni f1 ed f2 del tipo sopra considerato. In questo casosi considerano una soluzione particolare u1 relativa ad f1 ed una soluzioneparticolare u2 relativa ad f2 e la soluzione particolare relativa alla sommaf = f1 + f2 viene data da u = u1 + u2.
Infatti, risulta
an u(n) + an−1 u(n−1) + · · ·+ a1 u
′ + a0 u
= an u(n)1 + an−1 u
(n−1)1 + · · ·+ a1 u
′1 + a0 u1
+ an u(n)2 + an−1 u
(n−1)2 + · · ·+ a1 u
′2 + a0 u2
= f1(x) + f2(x) = f(x) .
Metodo della variazione delle costanti arbitrarie di Lagrange
Si supponga ora che il termine noto f : I → R dell’equazione differenzialecompleta
an y(n) + an−1 y
(n−1) + · · ·+ a1 y′ + a0 y = f(x)
sia una funzione continua che non rientra tra quelle considerate nel casoprecedente. Si puo allora ricorrere al metodo della variazione delle costantiarbitrarie di Lagrange. Una volta determinate le n soluzioni linearmenteindipendenti u1, . . . , un dell’equazione omogenea, tale metodo consiste nelcercare una soluzione particolare della forma
u(x) := c1(x)u1(x) + · · ·+ cn(x)un(x) , (15.4.9)
dove c1, . . . , cn : I → R sono funzioni da determinare (da qui deriva ladenominazione del metodo).

440 Capitolo 15: Equazioni differenziali ordinarie
Imponendo le condizioni previste nel seguente sistema di n equazioninelle incognite c′1(x), . . . , c
′n(x)
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
c′1(x)u1(x) + · · ·+ c′n(x)un(x) = 0 ,c′1(x)u
′1(x) + · · ·+ c′n(x)u
′n(x) = 0 ,
...
c′1(x)u(n−2)1 (x) + · · ·+ c′n(x)u
(n−2)n (x) = 0 ,
c′1(x)u(n−1)1 (x) + · · ·+ c′n(x)u
(n−1)n (x) = f(x) ,
(15.4.10)
si riconosce che la corrispondente funzione u e una soluzione dell’equazionecompleta.
Infatti, utilizzando le relazioni previste in (15.4.10), per le derivate della funzioneu =
∑ni=1 ciui, si ha
u′ =n∑
i=1
c′iui +n∑
i=1
ciu′i =
n∑
i=1
ciu′i ,
u′′ =n∑
i=1
c′iu′i +
n∑
i=1
ciu′′i =
n∑
i=1
ciu′′i ,
...
u(n−1) =n∑
i=1
c′iu(n−2)i +
n∑
i=1
ciu(n−1)i =
n∑
i=1
ciu(n−1)i ,
u(n) =n∑
i=1
c′iu(n−1)i +
n∑
i=1
ciu(n)i = f +
n∑
i=1
ciu(n)i ,
(il calcolo di ogni derivata utilizza l’espressione ottenuta nel passaggio precedente). Aquesto punto si osserva che
u(n) + an−1 u(n−1) + · · ·+ a1 u
′ + a0 u
= f + c1(u(n)1 + an−1 u
(n−1)1 + · · ·+ a1 u
′1 + a0 u1)
+c2(u(n)2 + an−1 u
(n−1)2 + · · ·+ a1 u
′2 + a0 u2)
+ . . .
+cn(u(n)n + an−1 u
(n−1)n + · · ·+ a1 u
′n + a0 un)
e tenendo conto del fatto che u1, . . . , un sono soluzioni dell’equazione omogenea, si ha
u(n) + an−1 u(n−1) + · · ·+ a1 u
′ + a0 u = f ,
e quindi u e soluzione dell’equazione completa.
Il determinante dei coefficienti del sistema lineare (15.4.10) e proprio ildeterminante della matrice WronskianaW (x) e poiche le soluzioni u1, . . . , un
sono linearmente indipendenti, esso e diverso da 0. Segue che il siste-ma (15.4.10) ammette un’unica soluzione c′1(x), . . . , c
′n(x) e considerandone
una loro primitiva, da quanto osservato si ottiene la soluzione particolare(15.4.9).
Ulteriori riferimenti
L’elenco seguente puo essere utile per un approndimento degli argomentitrattati e per ulteriori esempi ed esercizi.
[1] T. M. Apostol, Calcolo, Vol. I e II, Boringhieri, Torino, 1977.
[2] A. Avantaggiati, Analisi Matematica I, Editrice Ambrosiana,Milano, 1994.
[3] G. C. Barozzi, S. Matarasso, Analisi Matematica I, Zanichelli,Bologna, 1986.
[4] P. Boieri, G. Chiti, Precorso di Matematica, Zanichelli, Bologna,1994.
[5] V. E. Bononcini, G. Fanti, Esercizi di Analisi Matematica, Vol. I,Cedam, Padova, 1970.
[6] N. Bourbaki, Elementi di storia della matematica, Feltrinelli, Milano,1963.
[7] R. Caccioppoli, Lezioni di Analisi Matematica, Vol. I, Treves,Napoli, 1959.
[8] F. Cafiero, A. Zitarosa, Lezioni di Analisi Matematica, LiguoriEditore, Napoli, 1970.
[9] S. Campanato, Lezioni di Analisi Matematica, prima parte, LibreriaScientifica G. Pellegrini, Pisa, 1977.
[10] S. Campanato, Esercizi e complementi di Analisi Matematica, primaparte, Libreria Scientifica G. Pellegrini, Pisa, 1975.
[11] M. Campiti, Analisi Matematica I, Teoria ed Esercizi, Liguori Editore,Napoli, 1995.
442 Ulteriori riferimenti
[12] E. Casari, Questioni di filosofia della matematica, Feltrinelli, Milano,1964.
[13] J. P. Cecconi, G. Stampacchia, Analisi Matematica, I: Funzioni diuna variabile, Liguori Editore, Napoli, 1974.
[14] J. P. Cecconi, G. Stampacchia, Esercizi e problemi di AnalisiMatematica, I: Funzioni di una variabile, Liguori Editore, Napoli, 1979.
[15] P. O. Cohen, La teoria degli insiemi e l’ipotesi del continuo,Feltrinelli, Milano, 1973.
[16] F. Conti, Calcolo, Mc Graw-Hill, Milano, 1993.
[17] R. Courant, H. Robbins, Che cos’e la matematica?, Boringhieri,Torino, 1971.
[18] P. De Lucia, R. Fiorenza, Esercizi di Analisi Matematica, LiguoriEditore, Napoli.
[19] N. Fedele, Corso di Analisi Matematica, Vol. I, Liguori Editore,Napoli, 1988.
[20] R. Fiorenza, D. Greco, Lezioni di Analisi Matematica, Vol. I,Liguori Editore, Napoli, 1985.
[21] P. R. Halmos, Teoria elementare degli insiemi, Feltrinelli, Milano,1970.
[22] G. Geymonat, Lezioni di Analisi Matematica I, Editrice Levrotto &Bella, Torino, 1981.
[23] A. Ghizzetti, Complementi ed esercizi di Analisi Matematica, Vol. I,Libreria Veschi, Roma, 1956.
[24] A. Giannone, V. Conserva, Esercitazioni di Matematica, AdriaticaEditrice Salentina, Lecce, 1985.
[25] G. Gilardi, Analisi Uno, Mc Graw-Hill, Milano, 1991.
[26] E. Giusti, Analisi Matematica I, Boringhieri, Torino, 1983.
[27] D. Greco, G. Stampacchia, Esercitazioni di Matematica, LiguoriEditore, Napoli, 1966.
[28] H. J. Keisler, Elementi di Analisi Matematica, Vol. I, Piccin Editore,Padova, 1982.
Ulteriori riferimenti 443
[29] E. Marcante, M. Montagnana, Lezioni di Analisi Matematica I,Vol. I e II, Celid, Torino.
[30] P. Marcellini, C. Sbordone, Esercitazioni di Matematica, Vol. I,Liguori Editore, Napoli, 1988.
[31] E. Mendelson, Introduzione alla logica matematica, Boringhieri,Torino, 1972.
[32] C. Miranda, Lezioni di Analisi Matematica, Parte prima, LiguoriEditore, Napoli, 1966.
[33] C. D. Pagani, S. Salsa, Analisi Matematica I, Masson, Milano,1994.
[34] E. R. Pegna, Studio analitico e grafico delle funzioni, Editrice Giorgio,Torino.
[35] G. Pellacani, G. Pettini, C. Vettori, Istituzioni di Matematica,Editrice Clueb, Bologna, 1977.
[36] M. Picone, G. Fichera, Corso di Analisi Matematica, Vol. I, LibreriaVeschi, Roma, 1975.
[37] G. Prodi, Analisi Matematica, Boringhieri, Torino, 1970.
[38] A. Schiaffino, Analisi Matematica I, Unitor, Roma, 1990.
[39] G. Scorza Dragoni, Elementi di Analisi Matematica, Cedam, Pa-dova, 1966.
[40] V. I. Smirnov, Corso di Matematica Superiore I, Vol. I, EditoriRiuniti, Roma, 1977.
[41] F. Speranza, Relazioni e strutture, Zanichelli, Bologna, 1970.
[42] M. Stoka, Esercizi e problemi di Analisi Matematica I, EditriceLevrotto & Bella, Torino, 1989.
[43] M. Stoka, V. Pipitone, Esercizi e problemi di Matematica, Cedam,Padova, 1988.
[44] M. Stoka, G. Santoro, Esercizi e complementi di Matematica (peri precorsi universitari), Cedam, Padova, 1988.
[45] M. Troisi, Analisi Matematica I, Liguori Editore, Napoli, 1985.
444 Ulteriori riferimenti
[46] The Open University, Introduzione all’analisi e all’algebra, Analisi,Mondadori, Milano, 1974.
[47] F. G. Tricomi, Esercizi e complementi di Analisi Matematica, Cedam,Padova, 1965.
[48] T. Viola, Introduzione alla teoria degli insiemi, Boringhieri, Torino,1975.
[49] F. Waismann, Introduzione al pensiero matematico, Boringhieri,Torino, 1971.
[50] M. Zamansky, Introduzione all’algebra e all’analisi moderna, Feltri-nelli, Milano, 1966.
[51] G. Zwirner, Esercizi e complementi di Analisi Matematica, parteprima, Cedam, Padova.
Michele CampitiDipartimento di Matematica “E. De Giorgi”
Universita del SalentoP.O.Box 19373100 Lecce
E-Mail: [email protected]




























