Embed Size (px)
Citation preview

The 13th Annual General Assembly of the IAMU
Expanding Frontiers -
Challenges and Opportunities in Maritime Education and Training
AN ew Student-Centered Control Laboratory Using Matlab/Simulink
Ziqian Liu Department of Engineering, SUNY Maritime College
Abstract: In order to well prepare our engineering students for the challenges presented by advanced technologies in the 21st century, a student-centered control laboratory has been developed recently in the State University of New York Maritime College for a senior control course. We adopted Windows XP based software, Matlab/Simul ink, in our laboratory. With the goal to stimulate the enthusiasm of our students and tie closely theory and practice, a series of fourteen application projects were elaborated in the laboratory, which include the following design themes: ship control system, submarine depth control system, DC motor control system, machine tool control system, satell ite Halo control system, space telescope control system, automotive power train control system, design of PID controllers, compact disc player control system, VTOL aircraft control system, space shuttle flight control system, satellite ground tracking antenna control system, etc. Through the above computer aided projects, students not only learned how to design, analyze and synthesize a control application system, but also strengthened their understanding of theoretical and abstract subjects in control theory. Key Words: Control Laboratory, Matlab/Simulink, Computer Simulation, Electrical Engineering, Engineering Training, Maritime Education
1. Introduction
It is vital in engineering education for an instructor to let students grasp the relation between theory and application. In Electrical Engineering there are many topics that are heavily theoretical and abstract, and require intensive mathematical background. Hence it becomes particularly challenging fo r an EE instructor to help students build the bridge that leads from theory to application. The control course is a classic but also a difficult course in engineering education. Its traditional laboratory components usually are made up using analog devices to simulate control systems, which lack the emphasis on the soft side of intelligent control design skills. With the energy saving revolution in progress, the lab is playing a more important role in engineering curriculum. Since a control course mainly focuses on theoretical and abstract subjects, it is very challenging for an instructor to attract and keep our students ' interest when teaching it. From a pedagogical point of view, computer simulation provides a hands-on tool for students to gain deep insights on both transient and steady-state responses for a control system, which often are
23

A New Student-Centered Control Laboratory Using Matlab/Simulink
not easily mastered through studying theory. In industry, modeling and simulation are widely used by engineers as a critical procedure to design a control system in order to save the cost of building a system prototype. Furthermore, computer-aided laboratory exercises can make students have accomplishment feelings and therefore can create more space for their creativities.
In order to well prepare our engineering students for the challenges presented by advanced technologies in the 21st century, a student-centered control laboratory has been developed recently in the State University of New York Maritime College for a senior control course. We adopted Windows XP-based software, Matlab/S imulink, in our laboratory. Matlab/Simulink is a powerful tool for efficiently and effectively developing sophisticated control systems in a wide range of applications. Its graphics and design methods are implemented by using high level, user-friendly functions . In our student-centered control laboratory, a series of fourteen application projects were elaborated. The themes of our lab projects include the following designs: ship control system, submarine depth control system, DC motor control system, machine tool control system, satellite Halo control system, space telescope control system, automotive power train control system, design of PID controllers, compact disc player control system, VTOL aircraft control system, space shuttle flight control system, satellite ground tracking antenna control system, etc. Through the above hands-on projects, students not only learned how to design, analyze and synthesize a control application system, but also strengthened their understanding of theoretical and abstract subjects in control theory. After we implemented the student-centered laboratory using Matlab/Simulink, students showed great enthusiasm towards the course throughout the whole semester. The results of student surveys demonstrate the effectiveness of our laboratory component in suppo1ting student learning
With the feedback from students, we are confident that our newly developed laboratory made contributions in enhancing student intelligent control design skills on the soft side, which is highly demanded for a 21" century and future engineer.
In the following sections, we will discuss some of our laboratory projects. In Section 2, we present the project of a submarine depth control system. In Section 3, we describe the design project of aircraft control system. In Section 4, we illustrate the design project of a space telescope control system. In Section 5, we show the project of PID controller design. Finally, we present some discussions in section 6.
2. Design of Submarine Depth Control System
24
2.1 Laboratory Description
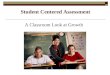
To control the motion of a submarine is significantly different from the control of a surface ship, aircraft, or missile. This difference is primarily caused by the movement in the vertical plane because of the buoyancy effect. Therefore, it is interesting to consider the control of the depth of a submarine. The depth is measured by a pressure transducer. The equations describing the dynamics of a submarine can be obtained by using Newton's laws and the angles defined in the following Fig. 1 [l] [2]. To simplify the equations, we will assume that e is a small angle and the velocity v is constant and equal to 25 ft/s. The state variables of the submarine, considering only vertical control, are x
1 = e, x
2 =de I dt, and x
3 = a, where a is the angle of attack.
Thus the state vector differential equation for this system, when the submarine has an Albacore type hull, is

[.X
1] [ 0 ~2 = -0.0071
X3 0
1
- 0.111
0.07
0 j[Xlj [ 0 j 0.12 ~2 + - 0.095 u(t)
- 0.3 X3 0.072
where u(t) =Os (t) , the deflection of the stern plane.
gtavity
Figure 1. Submarine Depth Control
2.2 Laboratory Assignment
Using Matlab/Simulink:
Liu
Velocity v
(1.) To investigate the response of the system to a stern plane step command of
0.285° with the initial conditions equal to zero.
(2.) To determine whether the system is stable under the aforementioned conditions.
2.3 Explanation about this Laboratory
This project is designed to aid students in understanding and mastering the important concepts, and acquiring the corresponding skills as listed below:
Understand the important role of state variable modeling in control system design. Know how to obtain the time responses for state variable models. Be familiar with the computer-aided control system design tool, Matlab/Simulink. Know how to determine the stability of a dynamic system.
25

A New Student-Centered Control Laboratory Using Matlab/Simulink
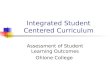
2.4 Laboratory Graphic Results
The Matlab/Simulink graphic solution is given in the following Fig. 2, which shows the response of the state variables of the submarine system to a step change in the stern plane.
o.s.----.--~--,-----~--~--~--.----.--~-~
20 40 60 80 100 120 140 160 180 200
Figure 2. Response of the state variables of the submarine system
3. Design of Aircraft Control System
26
3.1 Laboratory Description
The objective of vertical takeoff and landing (VTOL) aircraft is to accomplish operation from a relatively small airport, while still performing like a normal aircraft in level flight. Therefore, the VTOL aircraft taking off in a way similar to an air missile (at the end) is certainly unstable. A control system using adjustab le jets can control the vehicle. The dynamics of a jump-jet aircraft can be represented by an open-loop transfer function shown in Fig. 3.
r s+l , __ y
s(s - l)(s + 6)
Figure 3. A jump-jet aircraft system
3.2 Laboratory Assignment
Part 1. For the open-loop control system described by the above block diagram, use Matlab/Simulink to plot unit step response of the system output y(t)
Part 2. Consider the closed loop control system shown in Fig. 4 [3]

Liu
~ s+l I r -~ s(s - l)(s + 6) f---1-o y
Figure 4. Closed loop control .1ystem
where K is the gain of the proportional controller. Use Matlab/Simulink to plot unit step response of the system output y(t) for the following three cases:
Case 1: K= 24 Case 2: K=l2 Case 3: K=6
and compare the differences among them. Part 3. Compare the results in part 1 and part 2, what are your conclusions?
3.3 Explanation about this Laboratory
This project is designed to aid students in understanding and mastering the important concepts, and acquiring the corresponding skills as listed below:
Understand the concept of stability and how important it is for a dynamic system. Know how to obtain the time responses for a closed loop control system. Be familiar with the computer-aided control system design tool, Matlab/Simulink. Be aware of constructing a feedback control to let an unstable system become a stable system.
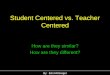
3.4 Laboratory Graphic Results
The Matlab/Simulink graphic solutions are given in the following figures . Fig. 5 shows the response of the jump-jet for an open-loop control system, which is unstable. Fig. 6 shows the responses of the jump-jet for a closed-loop feedback control system under different control parameters.
7000~-~--~-~--~-~--~-~--~-~-~
6000
5000
4000
3000
2000
1000
10
Figure 5. Response of jump-jet for open-loop control system
27

A New Student-Centered Control Laboratory Using Matlab/Simulink
10
Figure 6. Responses ofjump~jetfor closed loop control system
4. Design of Space Telescope Control System
28
4.1 Laboratory Description
We consider a telescope operated in space but controlled from Earth. The goal is to manipulate and position the telescope to accurately point at a planet. The actuator chosen is a low-power actuator, and the model of the combined actuator and telescope is shown in Fig 7. The command signal is received from an Earth station with a delay of 71'6 seconds. A sensor will measure the pointing direction of the telescope accurately. However, this measurement is relayed to Earth with a delay of seconds. Therefore, the control system is shown in Fig 8 [ 1] [ 4]. The controller is a PID controller.
U(s)
Cmun1and signal fron1 Earth station
1
(s + 1)2
Figure 7. Model of a Lmv-Power Actuator and Telescope
4.2 Laboratory Assignment
Y(s)
Telescope angle
Using Matlab/Simulink to plot the step responses of the control system under the following controllers:
(1.) KP= 0.022, K1
= 0.22, and K 0 = 0
(2.) KP= 0.8, K1 = 0.5, and K
0 = 10-3

R(s) + --Desired telescope
angle
·I Gc(s)~ e-7ri'6 ~
e-ry{6
Figure 8. Feedback control system for the Space Telescope
4.3 Explanation about this Laboratory
1
(s + 1)2
Y( s)
Ac tun I scope 1gle
tele a1
Liu
This project is designed to aid students in understanding and mastering the important concepts, and acquiring the corresponding skills as listed below:
Understand the important role of modeling in the control system design process. Be aware of the dynamic behavior of a time delayed control system. Understand the robust design, such as, a robust PID system. Know how to obtain transient responses by using computer-aided design tool.
4.4 Laboratory Graphic Results
The Matlab/Simulink graphic solutions are given in the following figmes. Fig. 9
shows the time response for the following design parameters KP= 0.022, K1 = 0.22,
and K0
= 0. Fig. 10 shows the time responses for the following design parameters KP = 0.8, KI = 0.5, and K
0 = 10·3•
1.4~---~----~---~----~---~---~
1.2
15 20 25 30
Figure 9. Time response for KP= 0.022, KI= 0.22, and K 0 = 0.
29

A New Student-Centered Control Laboratory Using Matlab/Simulink
1.4~---~---~---~----~---~---~
1.2
10 15 20 25 30
Figure 10. Time response for KP= 0.8, K1 = 0.5, and K
0 = 10-3
5. Design of PID Controllers
30
5.1 Laboratory Description
The speed control of a high-speed train is represented by the system shown in Fig. l l. The transfer function of the train dynamics is shown in Fig. 12.
I G(s) = -.,----
s"" +10s +20
5.2 Laboratory Assignment
Part A. For the open-loop system described by the following block diagram, assume that the input r(t) is a unit step. (1) Compute the steady-state system output Y,s" (2) Find the steady-state error e,,· (3) Make a plot for the system output y(t) by using Matlab/Simuhnk.
r 1 y
s2 + 10s + 20
Figure 11. A high speed train system
Part B. Consider the closed loop control system shown below, where D(s) is a PID controller. Assume that the input r(t) is a unit step. Determine the steady-state error

r
Liu
and use Matlab/Simulink to plot the response of the system output y(t) for each of the following cases:
(1.)
(2.)
(3.)
( 4.)
+
Use P control, let D(s) = K, in which p
(a) KP= 30 (b) KP= 300, and (c) K = 1000
P K Use Pl control, let D(s) = Kp +- 1
s (a) KP= 300 andK
1= 10
(b) KP= 300 and K1 = 100 and
(c) KP= 300 and K1
= 100
Use PD control, let D(s) = Kp + Kns, in which
(a) KP= 300 andKD = 10 (b) KP= 300 and K
0 = 500, and
(c) KP=300andKD=l000
K Use PID control, let D(s) = K p + - 1 + K ns , in which
s (a) KP=30,K
1= lOandKD= 10
(b) KP= 300, K1
= 100, and K0
= 500 (c) KP= 1000, K
1 = 300, and K
0 = 1000
1 - D(s) ~ s2 + 10s + 20
y
Figure 12. PID closed loop control system
Part C. Compare all results in Part A and Part B, what are your conclusions?
5.3 Explanation about this Laboratory
This project is designed to aid students in understanding and mastering the important concepts, and acquiring the corresponding skills as listed below:
Be familiar with the PID controller, which is a key element of many feedback control systems widely used in industry today. Understand the differences between the transient response and the steady-state response for a dynamic system. Get a good sense of the advantages and disadvantages of PID feedback in the process of a control system design. Recognize the central role of the error signal in the design and analysis of'a control system. Know how to obtain transient responses by using computer-aided design tool.
31

A New Student-Centered Control Laboratory Using Matlab/Simulink
32
5.4 Laboratory Graphic Results
The Matlab/Simulink graphic solutions are given the following figures . Fig. 13 shows the responses of P control feedback system with Kp = 30, 300, and 1000. Fig. 14 shows the response of PID control feedback system with Kp = 30, Ki = 10, and Kcl = 10.
2
Figure 13. Responses of P control.feedback system with Kp = 30, 300, and 1000
0.4
0.2
10 15 20 25 30 35 40
Figure 14. Response of PID control.feedback system with Kp = 30, Ki = 10, and Kd = 10

Liu
6. Conclusions
In this paper, we presented the design of a series of application projects for a student-centered control laboratory using Matlab/Simulink in a senior control course. By asking students to do a soft-side computer aided laboratory and develop their own solutions for the laboratory projects, we give students opportunities to put theory into practice, which also keeps students' interest high. Furthem10re, the laboratory exercises provide a sense of accomplishment to the students and allows room for their creativities.
References
[1] DorfR. and Bishop R., "Modern Control Systems", 11th Edition, Pearson Prentice Hall, 2008.
[2] Liceaga-castro E and Vander G., "A submarine depth control system design", International Journal of Control, Vol. 61, No. 2, 1995, pp 279-308.
[3] Franklin G., Powell J., and Emami-Naeini A., "Feedback Control ofDynamic Systems'', 6th Edition, Pearson Prentice Hall, 2010.
[4] Shoureshi R., "Intelligent control systems, are they for real?", Journal ofDynamic Systems, measurement, and control, Vol. 115 No. 2, 1993, pp 392-401.
33