Embed Size (px)
Citation preview
Płyty i powłoki
Literatura:R.Bąk, T.Burczyński, „Wytrzymałość materiałów z elementami ujęcia komputerowego”. WNT, Warszawa 2001
Płyty i powłoki13.1 Założenia teorii zginania
13.2 Siły wewnętrzne i naprężenia w pręcie
13.3 Równania równowagi elementu
13.4 Równanie różniczkowe powierzchni ugiętej płyty
13.6 Płyty kołowe osiowosymetryczne
13.5 Zagadnienia brzegowe dla płyt
13.7 Błonowa teoria powłok osiowosymetrycznych
13.8 Zgięciowa teoria cienkiej powłoki walcowej
13.9 Metoda elementów skończonych płyt i powłok
Przykład 13.5.1
Przykład 13.5.2
Przykład 13.6.1
Przykład 13.7.1
Przykład 13.7.2
Przykład 13.8.1
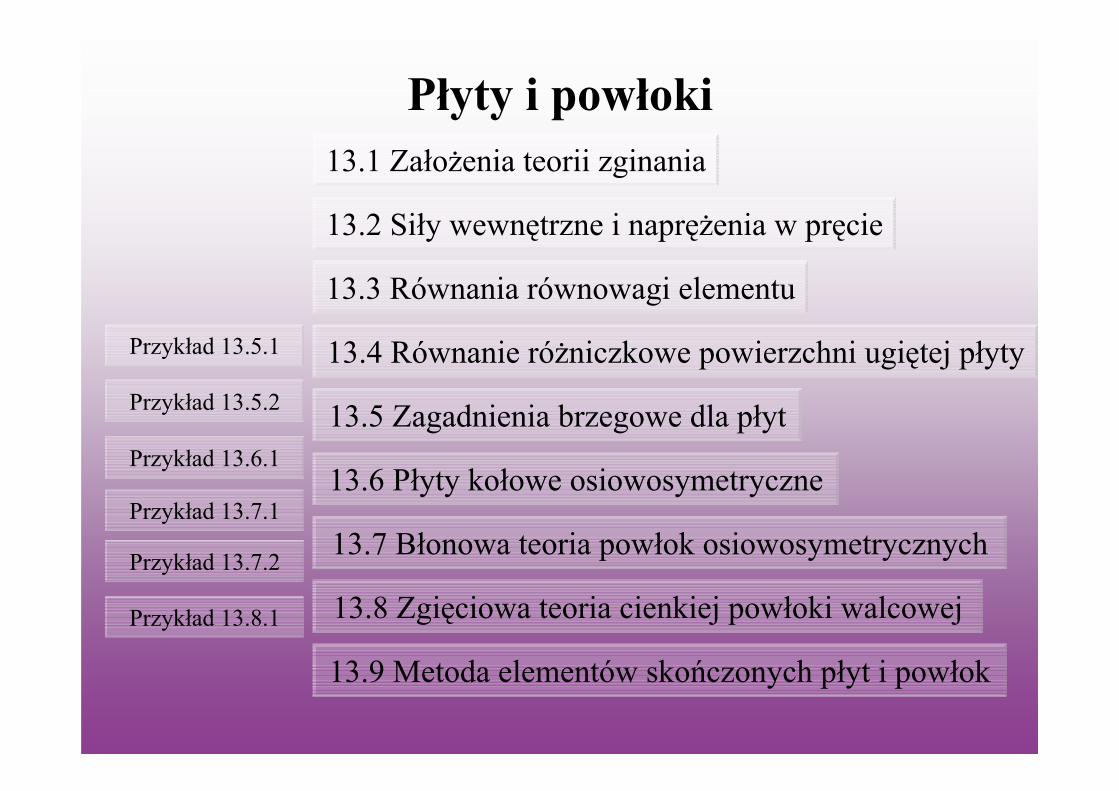
Ciało ograniczone dwoma równoległymi płaszczyznami, między którymi odległość (zwana grubością), jest znacznie mniejsza niż dwa pozostałe wymiary, przenoszące obciążenie prostopadłe do tych płaszczyzn, nazywa siępłytą cienką o równomiernej grubości. Przyjmiemy, że osie współrzędnych x i y leżą w poziomej, środkowej płaszczyźnie płyty, przechodzącej przez środek jej grubości h, a oś z jest skierowana w dół (rys. 13.1). Obciążenie przypadające na jednostkę powierzchni płyty określa funkcja q(x,y).
W teorii zginania płyt cienkich o równomiernej grubości przyjmuje sięnastępujące założenia:
l. Płytę cienką można traktować jako zbiór oddzielonych płaszczyznami prostopadłymi do osi z warstw, które nie oddziałują na siebie mechanicznie. Oznacza to, że naprężenie normalne sz w dowolnym punkcie płyty równe jest zeru .
Założenia teorii zginania płyt
13.1 Założenia teorii zginania płyt cienkich
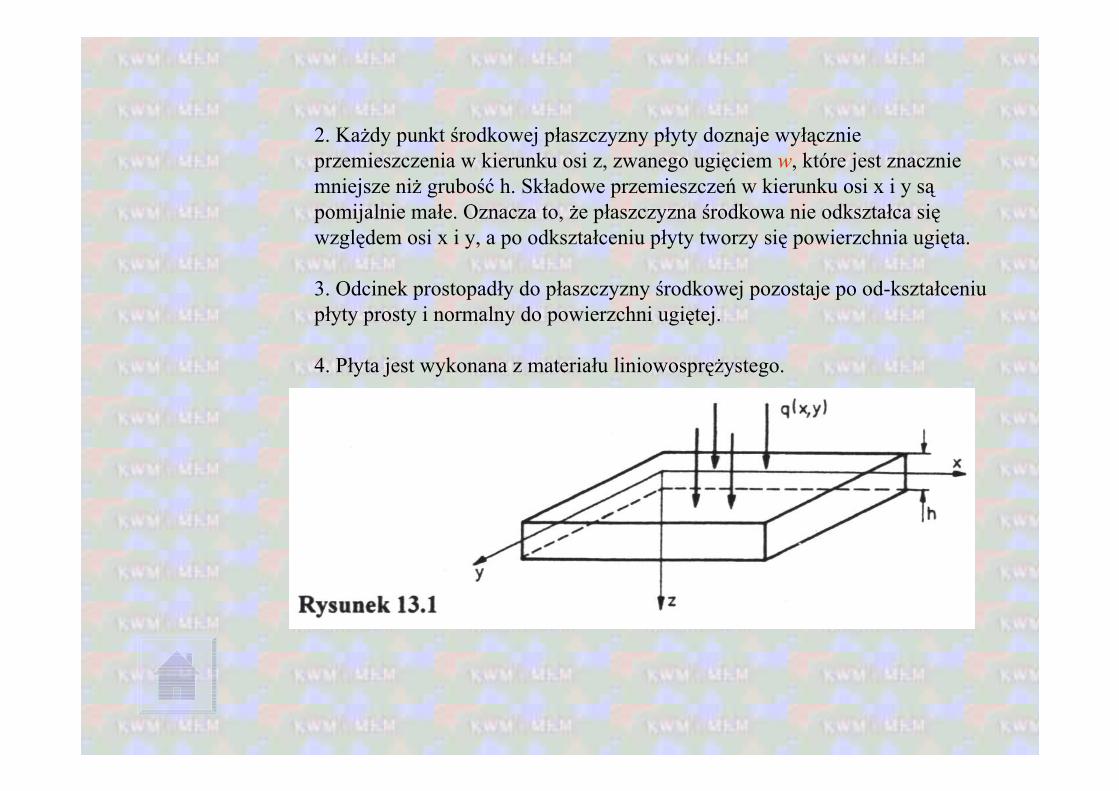
2. Każdy punkt środkowej płaszczyzny płyty doznaje wyłącznie przemieszczenia w kierunku osi z, zwanego ugięciem w, które jest znacznie mniejsze niż grubość h. Składowe przemieszczeń w kierunku osi x i y sąpomijalnie małe. Oznacza to, że płaszczyzna środkowa nie odkształca sięwzględem osi x i y, a po odkształceniu płyty tworzy się powierzchnia ugięta.
3. Odcinek prostopadły do płaszczyzny środkowej pozostaje po od-kształceniu płyty prosty i normalny do powierzchni ugiętej.
4. Płyta jest wykonana z materiału liniowosprężystego.
13.2 Siły wewnętrznei naprężenia w płycie
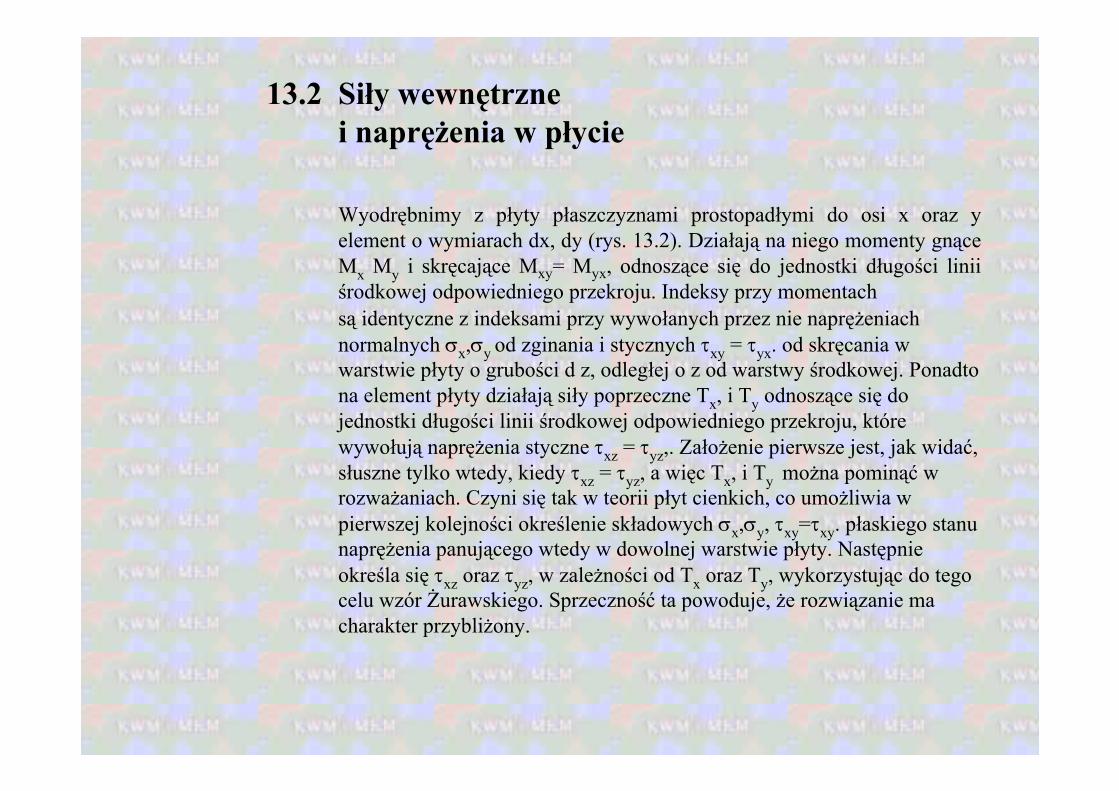
Wyodrębnimy z płyty płaszczyznami prostopadłymi do osi x oraz y element o wymiarach dx, dy (rys. 13.2). Działają na niego momenty gnące Mx My i skręcające Mxy= Myx, odnoszące się do jednostki długości linii środkowej odpowiedniego przekroju. Indeksy przy momentachsą identyczne z indeksami przy wywołanych przez nie naprężeniach normalnych σx,σy od zginania i stycznych τxy = τyx. od skręcania w warstwie płyty o grubości d z, odległej o z od warstwy środkowej. Ponadto na element płyty działają siły poprzeczne Tx, i Ty odnoszące się do jednostki długości linii środkowej odpowiedniego przekroju, które wywołują naprężenia styczne τxz = τyz,. Założenie pierwsze jest, jak widać, słuszne tylko wtedy, kiedy τxz = τyz, a więc Tx, i Ty można pominąć w rozważaniach. Czyni się tak w teorii płyt cienkich, co umożliwia w pierwszej kolejności określenie składowych σx,σy, τxy=τxy. płaskiego stanu naprężenia panującego wtedy w dowolnej warstwie płyty. Następnie określa się τxz oraz τyz, w zależności od Tx oraz Ty, wykorzystując do tego celu wzór Żurawskiego. Sprzeczność ta powoduje, że rozwiązanie ma charakter przybliżony.
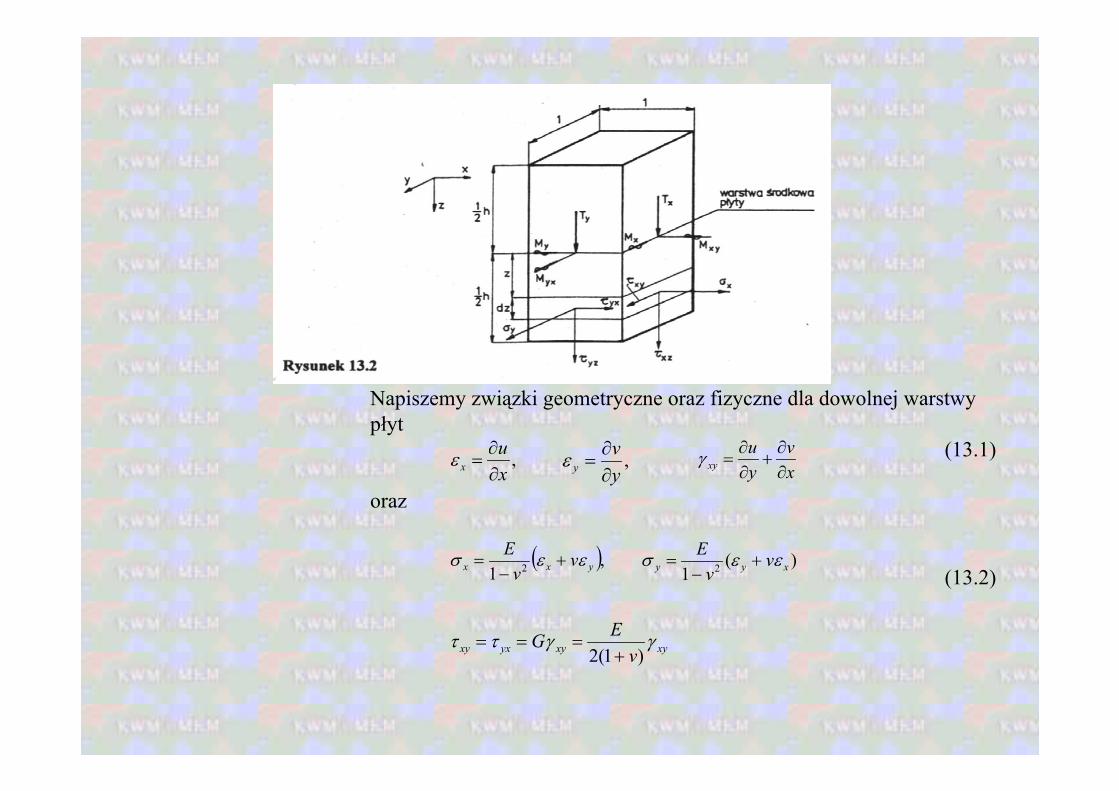
Napiszemy związki geometryczne oraz fizyczne dla dowolnej warstwy płyt
(13.1)
oraz
(13.2)
,xu
x ∂∂
=ε ,yv
y ∂∂
=ε xv
yu
xy ∂∂
+∂∂
=γ
( ),1 2 yxx v
vE εεσ +−
= )(1 2 xyy v
vE εεσ +−
=
xyxyyxxy vEG γγττ
)1(2 +===
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+==
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=
xvv
yu
vE
xuv
yv
vE
yvv
xu
vE
yxxy
y
x
12
1
1
2
2
ττ
σ
σ
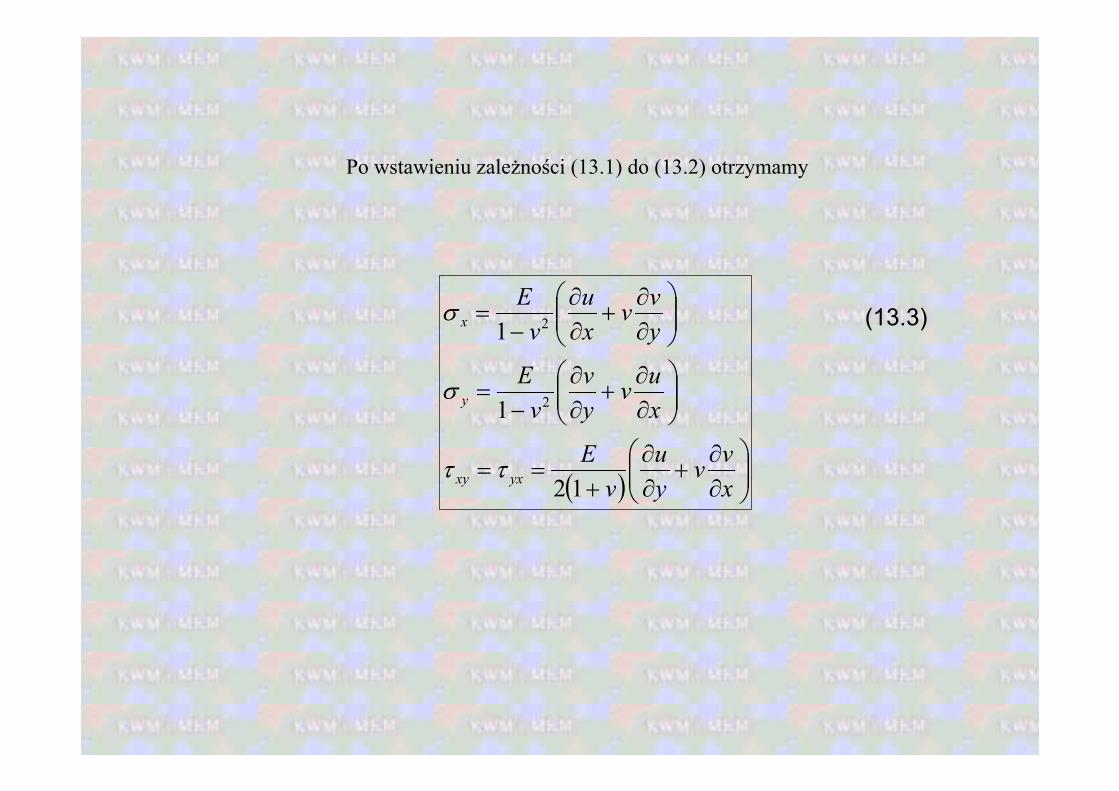
Po wstawieniu zależności (13.1) do (13.2) otrzymamy
(13.3)
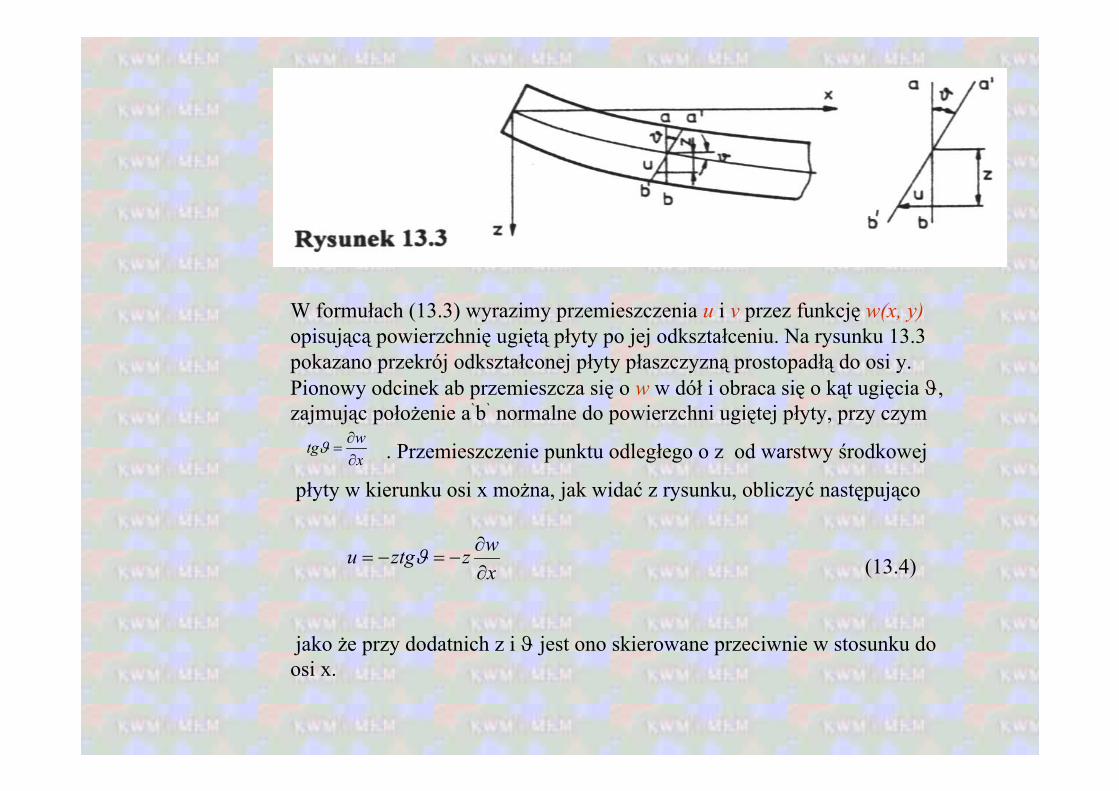
W formułach (13.3) wyrazimy przemieszczenia u i v przez funkcję w(x, y)opisującą powierzchnię ugiętą płyty po jej odkształceniu. Na rysunku 13.3 pokazano przekrój odkształconej płyty płaszczyzną prostopadłą do osi y. Pionowy odcinek ab przemieszcza się o w w dół i obraca się o kąt ugięcia ϑ, zajmując położenie a`b` normalne do powierzchni ugiętej płyty, przy czym
. Przemieszczenie punktu odległego o z od warstwy środkowej
płyty w kierunku osi x można, jak widać z rysunku, obliczyć następująco
(13.4)
jako że przy dodatnich z i ϑ jest ono skierowane przeciwnie w stosunku do osi x.
xwtg∂∂
=ϑ
xwzztgu∂∂
−=−= ϑ
Analogicznie znajdziemy przemieszczenie v
(13.5)
Po uwzględnieniu zależności (13.4) i (13.5) we wzorze (13.3) otrzymamy
(13.6)
(13.7)
(13.8)
ywzv∂∂
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−
= 2
2
2
2
21 ywv
xw
vEz
xσ
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−
= 2
2
2
2
21 xwv
yw
vEz
yσ
( ) yxw
vEz
yxwv
yxw
vEz
yxxy ∂∂∂
+−=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂∂
+−
==222
112ττ
Momenty Mx, My, Mxy równoważą układ elementarnych sił wewnętrznych, działających na jedną ścianę elementu płyty, pokazanego na rys. 13.2, i określonych przez naprężenia σx, σy, τxy. Warunki równowagi mająnastępującą postać
(13.9)
∫∫
∫∫
∫∫
−
−
−
==
==
==
2
2
2
2
2
2
h
hxy
Axyxy
h
hy
Ayy
h
hx
Axx
dzdxzdAzdyM
dzdxzdAzdxM
dzdxzdAzdyM
ττ
σσ
σσ
Po wstawieniu zależności (13.6), (13.7), (13.8) do (13.9) i skróceniu dx, dy, które nie podlegają całkowaniu, otrzymamy
(13.10)
∫
∫
∫
−
−
−
∂∂∂
+−=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−−=
2
2
22
2
2
22
2
2
2
2
2
2
22
2
2
2
2
1
1
1
h
hxy
h
hy
h
hx
dzzyx
wv
EM
dzzxw
yw
vEM
dzzyw
xw
vEM
121 3hI ⋅
=
Nietrudno zauważyć, że całka występująca w wyrażeniach (13.10) jest momentem bezwładności prostokąta o podstawie l i wysokości h
(13.11)
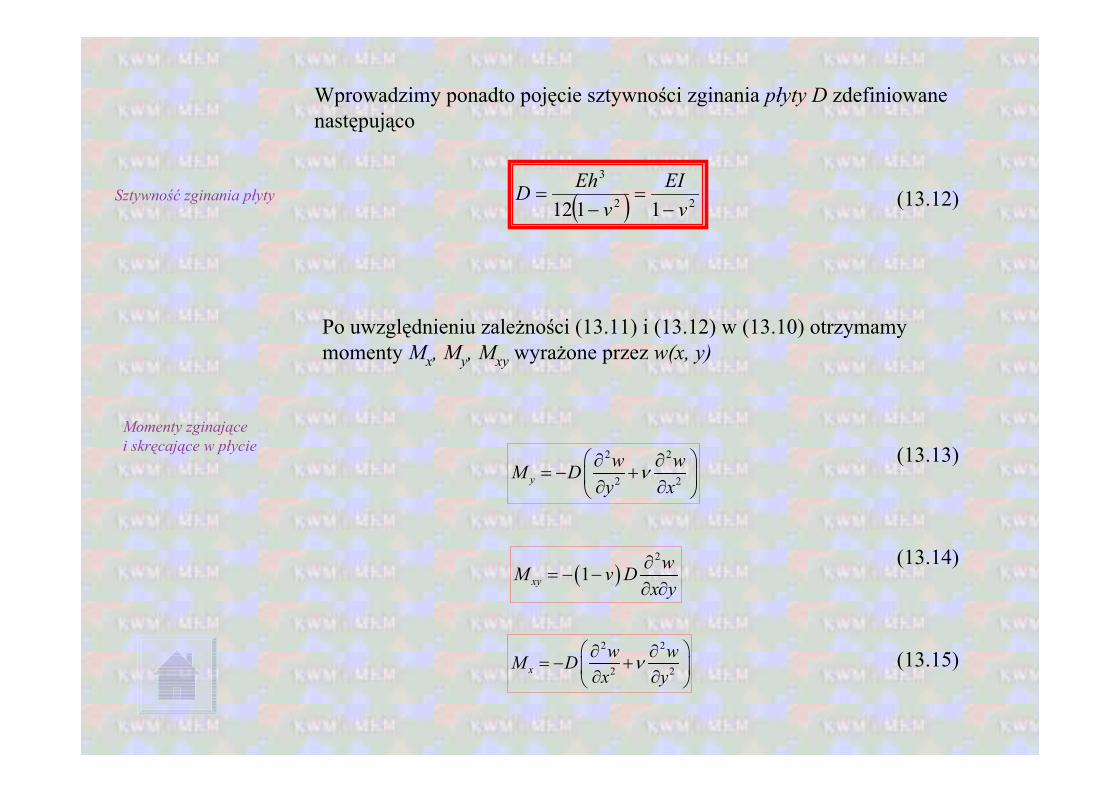
Wprowadzimy ponadto pojęcie sztywności zginania płyty D zdefiniowane następująco
(13.12)
Po uwzględnieniu zależności (13.11) i (13.12) w (13.10) otrzymamy momenty Mx, My, Mxy wyrażone przez w(x, y)
(13.13)
(13.14)
(13.15)
( ) 22
3
1112 vEI
vEhD
−=
−=
2 2
2 2xw wM D
x yν
⎛ ⎞∂ ∂= − +⎜ ⎟∂ ∂⎝ ⎠
2 2
2 2yw wM D
y xν
⎛ ⎞∂ ∂= − +⎜ ⎟∂ ∂⎝ ⎠
( )2
1xywM v D
x y∂
= − −∂ ∂
Sztywność zginania płyty
Momenty zginające i skręcające w płycie
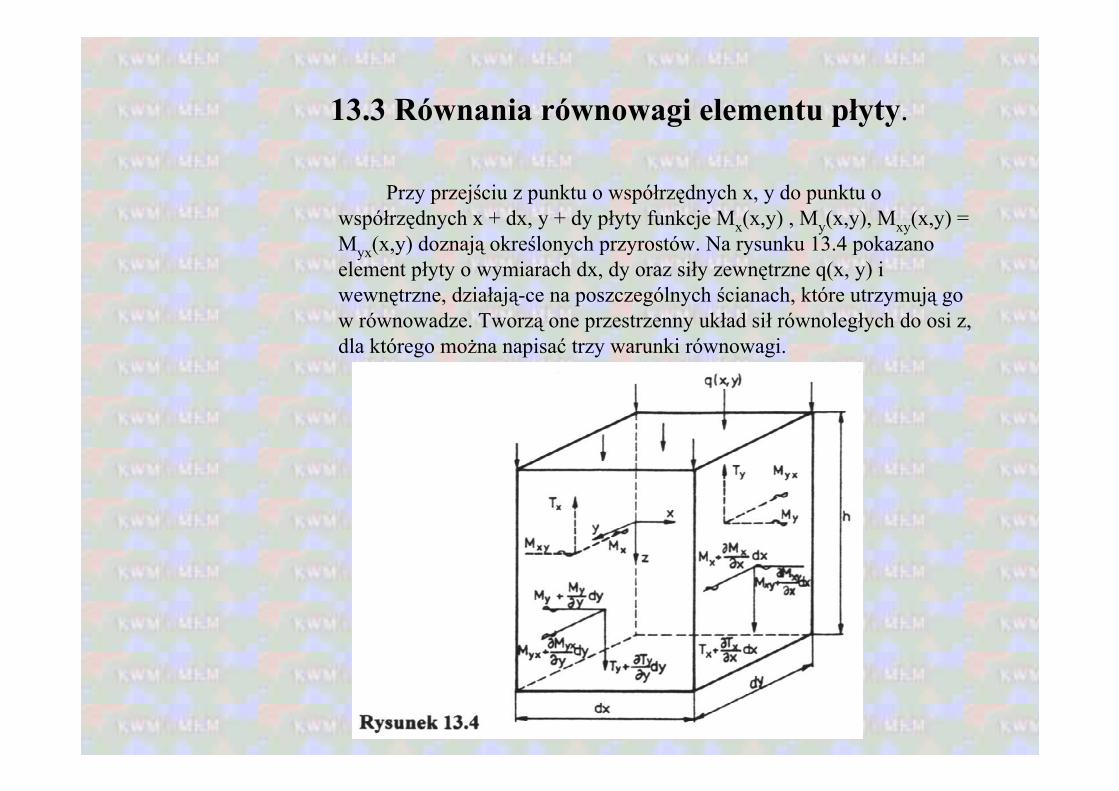
Przy przejściu z punktu o współrzędnych x, y do punktu o współrzędnych x + dx, y + dy płyty funkcje Mx(x,y) , My(x,y), Mxy(x,y) =Myx(x,y) doznają określonych przyrostów. Na rysunku 13.4 pokazano element płyty o wymiarach dx, dy oraz siły zewnętrzne q(x, y) i wewnętrzne, działają-ce na poszczególnych ścianach, które utrzymują go w równowadze. Tworzą one przestrzenny układ sił równoległych do osi z, dla którego można napisać trzy warunki równowagi.
13.3 Równania równowagi elementu płyty.
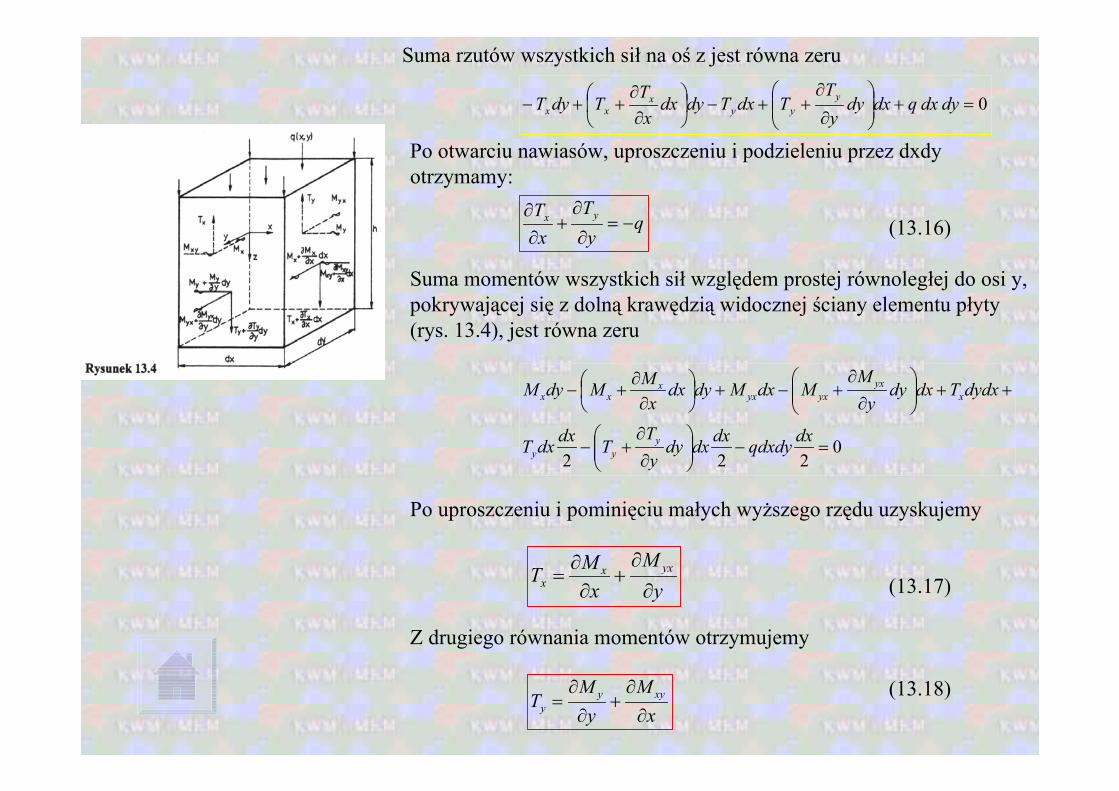
Suma rzutów wszystkich sił na oś z jest równa zeru
0 =+⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂++−⎟
⎠⎞
⎜⎝⎛
∂∂
++− dydxqdxdyy
TTdxTdydx
xT
TdyT yyy
xxx
Po otwarciu nawiasów, uproszczeniu i podzieleniu przez dxdyotrzymamy:
(13.16)
Suma momentów wszystkich sił względem prostej równoległej do osi y, pokrywającej się z dolną krawędzią widocznej ściany elementu płyty (rys. 13.4), jest równa zeru
Po uproszczeniu i pominięciu małych wyższego rzędu uzyskujemy
(13.17)
Z drugiego równania momentów otrzymujemy
(13.18)
qy
Tx
T yx −=∂
∂+
∂∂
0222=−⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+−
++⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+−+⎟
⎠⎞
⎜⎝⎛
∂∂
+−
dxqdxdydxdxdyyT
TdxdxT
dydxTdxdyy
MMdxMdydx
xMMdyM
yyy
xyx
yxyxx
xx
yM
xMT yxx
x ∂∂
+∂∂
=
xM
yM
T xyyy ∂
∂+
∂∂
=
13.4 Równanie różniczkowepowierzchni ugiętej płyty
Po wprowadzeniu zależności (13.17) i (13.18) do (13.16) otrzymamy
qyM
yxM
xM yxyx −=
∂∂
+∂∂
∂+
∂∂
2
22
2
2
2
Wyrazimy momenty Mx , My, Mxy w zależności (13.19) przez w(x,y), zgodnie z formułami (13.13), (13.14) i (13.15)
( ) qyx
wvywD
yxwDv
yxwv
xwD −=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂
−∂∂
∂−−⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂
− 22
4
4
4
22
4
22
4
4
4
12
stąd po podzieleniu przez D i rozwinięciu
Dq
yxwv
yw
yxwv
yxw
yxwv
xw
−=∂∂
∂−
∂∂
−∂∂
∂+
∂∂∂
−∂∂
∂−
∂∂
− 22
4
4
4
22
4
22
4
22
4
4
4
22
Ostatecznie po uproszczeniu i zmianie znaków równanie różniczkowe powierzchni ugiętej płyty, zwane równaniem Zofii Germain, uzyskuje następującą postać
(13.20)
Można je zapisać również w formie skróconej
Dq
yw
yxw
xw
=∂∂
+∂∂
∂+
∂∂
4
4
22
4
4
4
2
czyli(13.21)
Dqw
yxyx=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
2
2
2
2
2
2
2
2
Dqw =∇4
Równanie Zofii Germain
13.5 Zagadnienia brzegowe dla płyt
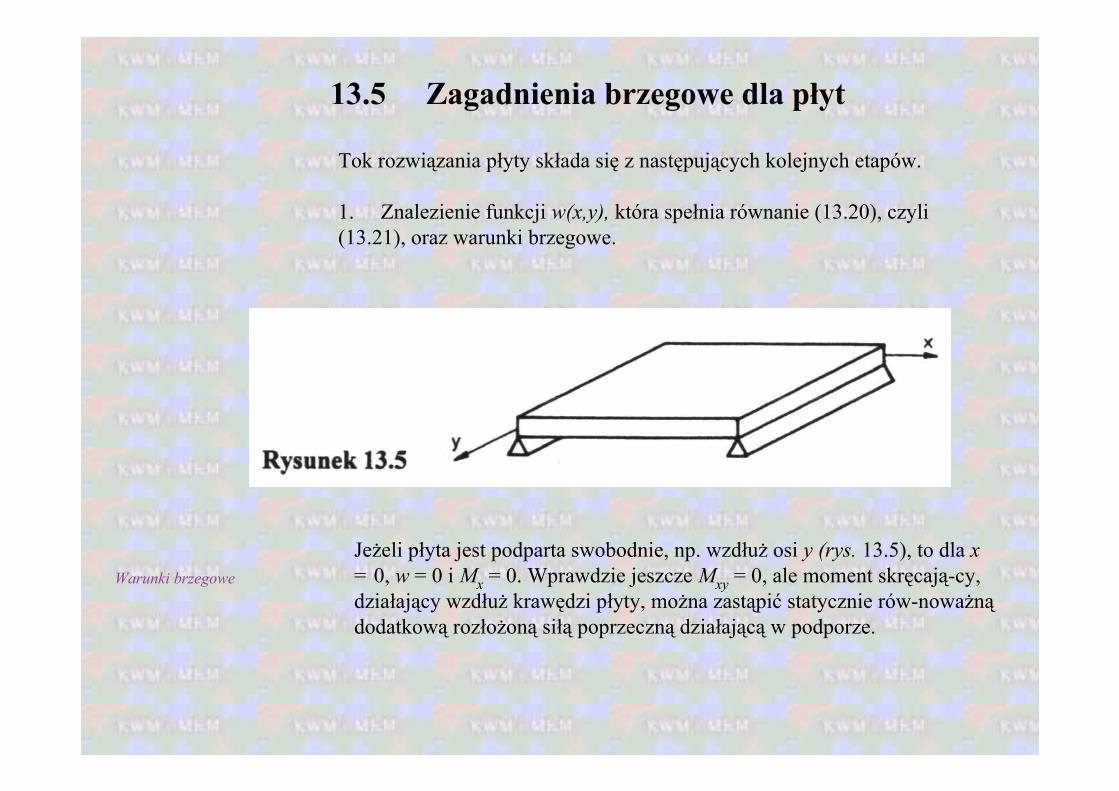
Tok rozwiązania płyty składa się z następujących kolejnych etapów.
1. Znalezienie funkcji w(x,y), która spełnia równanie (13.20), czyli (13.21), oraz warunki brzegowe.
Jeżeli płyta jest podparta swobodnie, np. wzdłuż osi y (rys. 13.5), to dla x = 0, w = 0 i Mx = 0. Wprawdzie jeszcze Mxy = 0, ale moment skręcają-cy, działający wzdłuż krawędzi płyty, można zastąpić statycznie rów-noważnądodatkową rozłożoną siłą poprzeczną działającą w podporze.
Warunki brzegowe
0=∂∂
xw
( )
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂∂
+∂∂
−=
∂∂∂
−−⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂∂
+∂∂
−=
2
3
3
3
2
3
2
3
3
3
czyli
1
yxw
xwDT
yxwDv
yxwv
xwDT
x
x
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂
−=yx
wywDTy 2
3
3
3
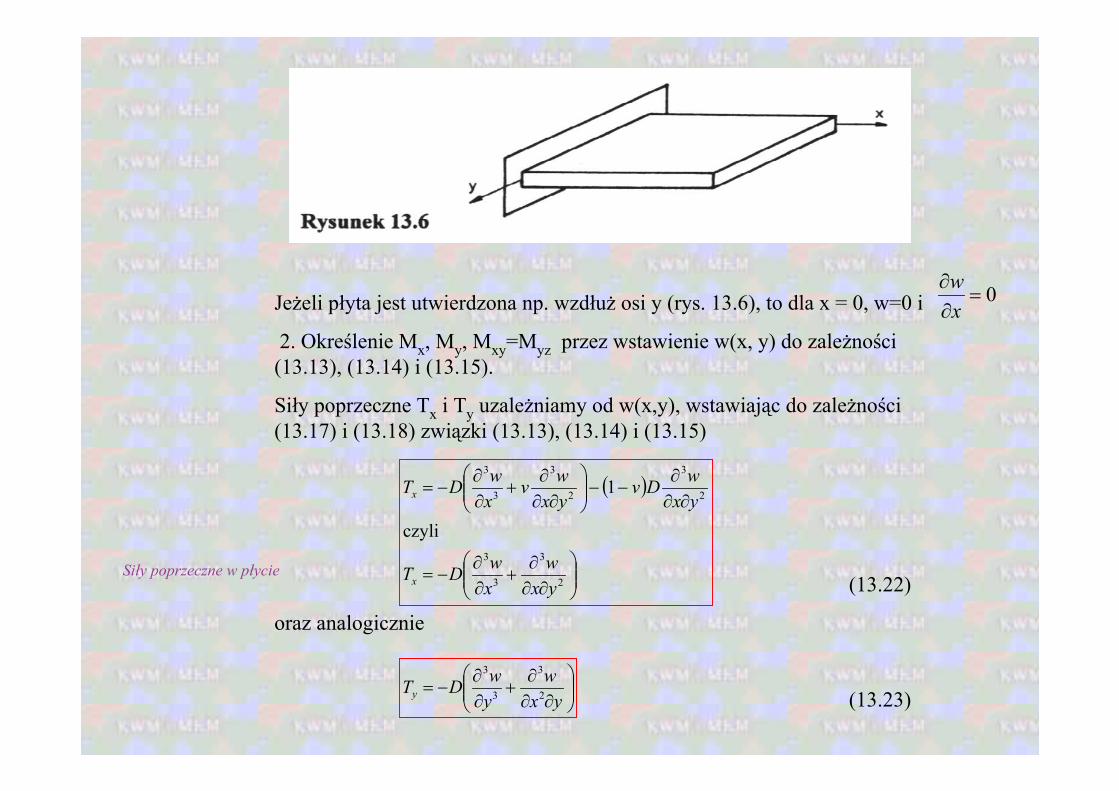
Jeżeli płyta jest utwierdzona np. wzdłuż osi y (rys. 13.6), to dla x = 0, w=0 i
2. Określenie Mx, My, Mxy=Myz przez wstawienie w(x, y) do zależności (13.13), (13.14) i (13.15).
Siły poprzeczne Tx i Ty uzależniamy od w(x,y), wstawiając do zależności (13.17) i (13.18) związki (13.13), (13.14) i (13.15)
(13.22)
oraz analogicznie
(13.23)
Siły poprzeczne w płycie
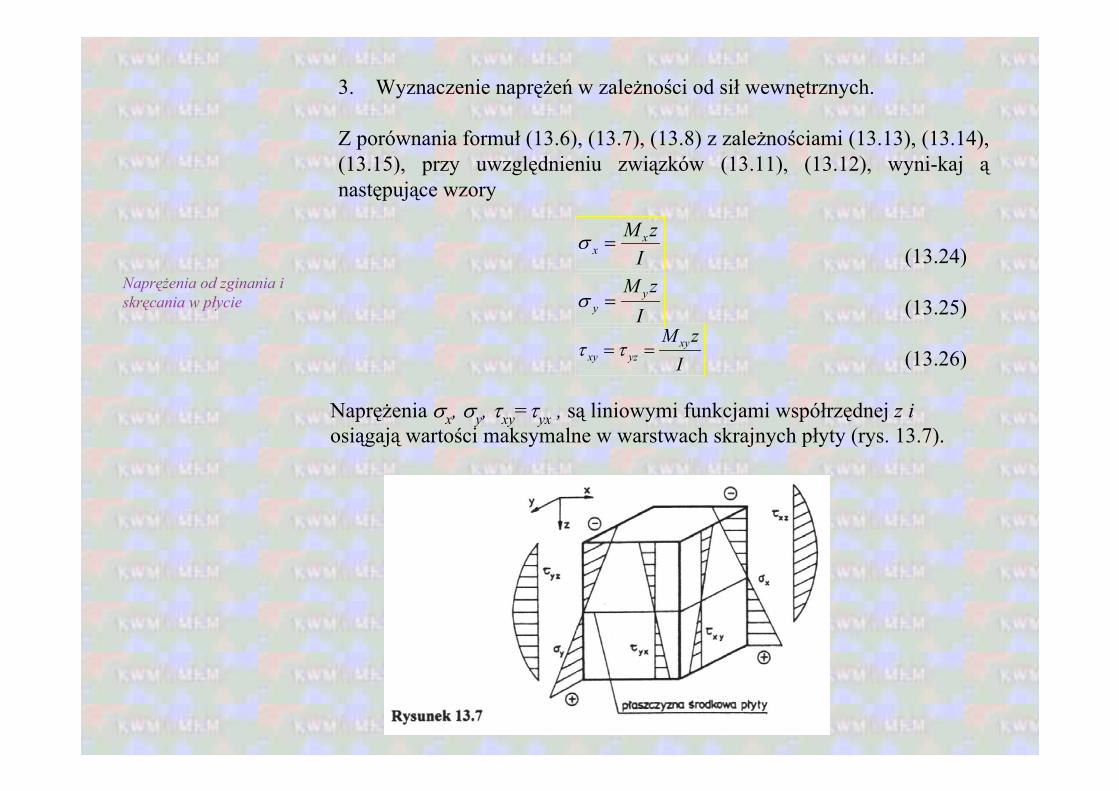
3. Wyznaczenie naprężeń w zależności od sił wewnętrznych.
Z porównania formuł (13.6), (13.7), (13.8) z zależnościami (13.13), (13.14), (13.15), przy uwzględnieniu związków (13.11), (13.12), wyni-kaj ąnastępujące wzory
(13.24)
(13.25)
(13.26)
Naprężenia σx, σy, τxy=τyx , są liniowymi funkcjami współrzędnej z iosiągają wartości maksymalne w warstwach skrajnych płyty (rys. 13.7).
IzM x
x =σ
IzM y
y =σ
IzM xy
yzxy ==ττ
Naprężenia od zginania i skręcania w płycie
Składowe pionowe naprężeń stycznych, a także równe im naprężenia styczne w płaszczyznach prostopadłych do osi z wyznaczymy ze wzoruŻurawskiego (2.51), tak jak dla belki o przekroju prostokątnym
(13.27)
(13.28)
ISTx
zxxz ==ττ
ISTy
zyyz ==ττ
Naprężenia od ścinania w płycie
gdzie moment statyczny odciętej części przekroju
prostokątnego o podstawie l i wysokości h względem osi x lub y.
⎟⎟⎠
⎞⎜⎜⎝
⎛−= 2
2
421 zhS
Naprężenia τxz i τyz są kwadratowymi funkcjami współrzędnej z i osiągająwartości maksymalne w warstwie środkowej płyty (rys. 13.7).
4. Ocena wytrzymałości płyty na podstawie wartości maksymalnych naprężeń, które wynoszą
(13.29)
(13.30)
(13.31)
gdzie:
(13.32)
(13.33)
(13.34)hTy
yz 23
max =τ
WM x
x ±=maxσ
WM y
y ±=maxσ
WM xy
xy ±=maxτ
62 2hhIW ==
hTx
xz 23
max =τ
Rozwiązanie płyty jest przykładem uproszczonego rozwiązania przestrzennego zadania teorii sprężystości w przemieszczeniach.
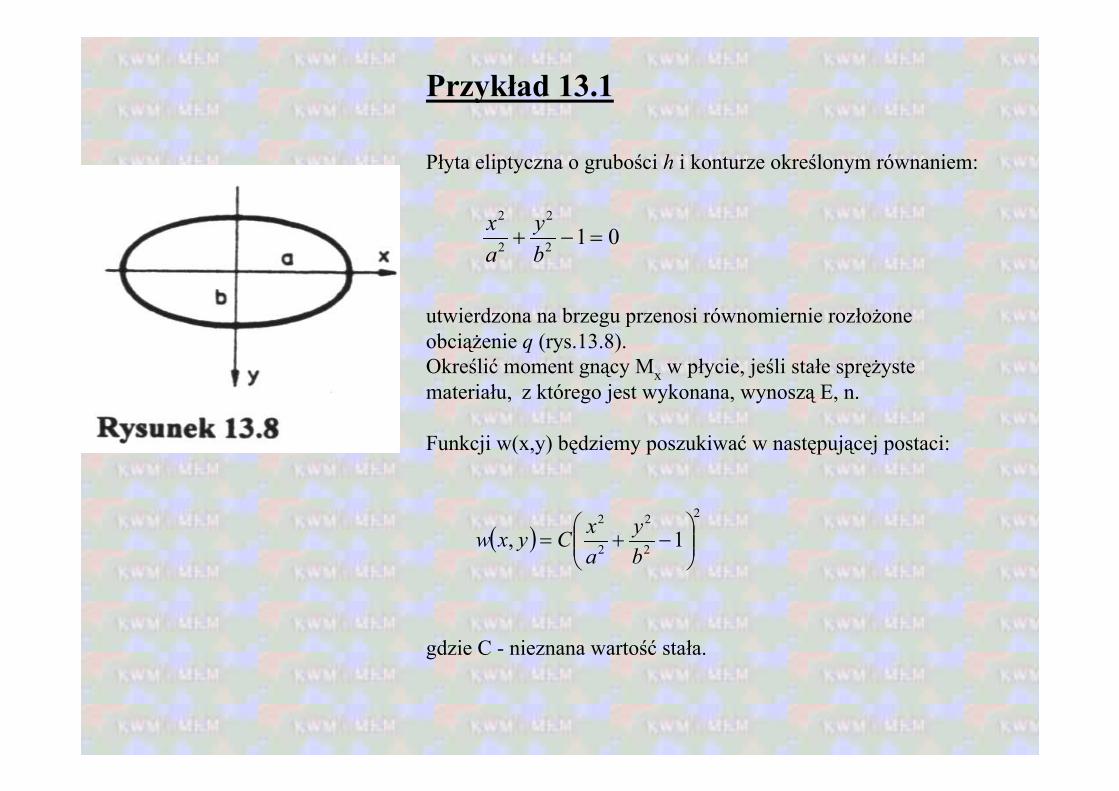
Przykład 13.1
Płyta eliptyczna o grubości h i konturze określonym równaniem:
utwierdzona na brzegu przenosi równomiernie rozłożone obciążenie q (rys.13.8).
012
2
2
2
=−+by
ax
Określić moment gnący Mx w płycie, jeśli stałe sprężyste materiału, z którego jest wykonana, wynoszą E, n.
Funkcji w(x,y) będziemy poszukiwać w następującej postaci:
gdzie C - nieznana wartość stała.
( )2
2
2
2
2
1, ⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
by
axCyxw
Obliczamy odpowiednie pochodne w(x, y), wstawiamy je do równania (13.20) i wyliczamy C
czyli
stąd
2223
3
223
3
44
4
44
4
223
3
2
2
2
2
22
2
2
2
2
3
222
2
2
2
8 ,24 ,24
24 ,64 ,134
4212
baC
yxw
by
aC
yxw
bC
yw
aC
xw
ax
aC
xw
by
ax
aC
xw
xbxy
ax
aC
ax
by
axC
xw
=∂∂
∂⎟⎠⎞
⎜⎝⎛=
∂∂∂
=∂∂
=∂∂
⎟⎠⎞
⎜⎝⎛=
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛−+=⎟⎟
⎠
⎞⎜⎜⎝
⎛−+=
∂∂
Dq
bC
baC
aC
=++ 4224248224
⎟⎠⎞
⎜⎝⎛ ++
=
42243238bbaa
D
qC
Funkcja opisująca powierzchnię ugiętą płyty przybiera następującą ostatecznąformę
a jej pochodne wynoszą
Warunki brzegowe, które wymagają, aby dla punktów leżących na konturze
są, jak widać, spełnione. Moment gnący wyliczamy następująco
czyli po wstawieniu w(x,y)
2
2
2
2
2
4224
13238
),( ⎟⎟⎠
⎞⎜⎜⎝
⎛−+
⎟⎠⎞
⎜⎝⎛ ++
=by
ax
bbaaD
qyxw
⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
∂∂ 14 ,14
2
2
2
2
22
2
2
2
2 by
ax
bCy
yw
by
ax
aCx
xw
0 ,0 ,0 ,012
2
2
2
=∂∂
=∂∂
==−+yw
xww
by
ax
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−= 2
2
2
2
ywv
xwDM x
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−++⎟⎟
⎠
⎞⎜⎜⎝
⎛−+
⎟⎠⎞
⎜⎝⎛ ++
−= v
ax
by
bby
ax
abbaa
qM x 1341343238
2
2
2
2
22
2
2
2
2
4224
xM
Przykład 13.2
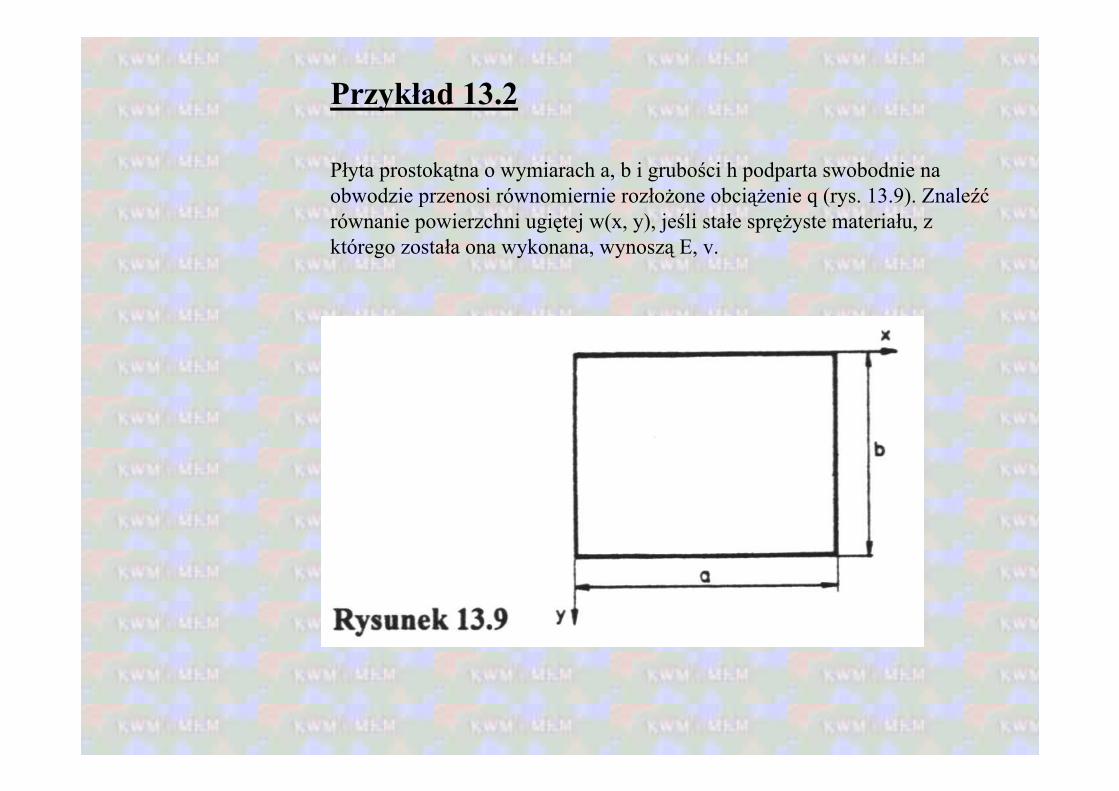
Płyta prostokątna o wymiarach a, b i grubości h podparta swobodnie na obwodzie przenosi równomiernie rozłożone obciążenie q (rys. 13.9). Znaleźćrównanie powierzchni ugiętej w(x, y), jeśli stałe sprężyste materiału, z którego została ona wykonana, wynoszą E, v.
Rzadko uzyskuje się rozwiązania płyty w formie zamkniętej. Często poszukuje się funkcji w(x,y) w formie nieskończonego szeregu.
W przypadku naszego zadania musi być w=0 na konturze. Ponadto muszą sięzerować na konturze momenty gnące. Pociąga to za sobą konieczność
zerowania się pochodnych i dla x=0 i x=a, a także y=0 i y=b.
Takie warunki brzegowe spełnia podwójny nieskończony szereg trygonometryczny, którego składniki są sinusami
gdzie Amn - wartości stałe.
Do znalezienia stałych Amn zależnych od m = l, 2, 3,... i n = l, 2,3,... zastosujemy równanie (13.20). Obliczamy odpowiednie pochodne w(x,y) i po podstawieniu ich do równania (13.20) otrzymujemy
2
2
xw
∂∂
2
2
yw
∂∂
∑∑∞
=
∞
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛=
1 1
sinsin),(m n
mn bxn
axmAyxw ππ
∑∑
∑∑
∑∑
∞
=
∞
=
∞
=
∞
=
∞
=
∞
=
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛+
+⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛+
+⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
1 14
441 1
22
4441 1
4
44
sinsin
sinsin2
sinsin
m nmn
m nmn
m nmn
Dq
bxn
axm
bnA
bxn
axm
banmA
bxn
axm
amA
πππ
πππ
πππ
Po zapisaniu lewej strony w formie jednej sumy równanie uzyskuje następującą postać
po dalszych oczywistych uproszczeniach
W celu rozłożenia prawej strony tego równania w podwójny szereg trygonometryczny stosujemy znaną z matematyki zależność
gdzie m = l, 3, 5,... W przypadku naszego zadania możemy napisać
Po pomnożeniu przez tak spreparowane jedynki możemy równanie różniczkowe powierzchni ugiętej płyty napisać w następującej formie
gdzie m = l, 3, 5,...; n = l, 3, 5,...
∑∑∞
=
∞
=
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛++
1 14
4
22
22
4
44 sinsin2
m nmn D
qb
xna
xmbn
banm
amA πππ
∑∑∞
=
∞
=
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+
1 1
2
2
2
2
24 sinsin
m nmn D
qb
xna
xmbn
amA πππ
( ) ( ) 1sin4
czyli ,4
sin11∑∑∞
=
∞
=
==mm m
mmm ψππψ
1sin14 i 1sin1411
=⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛ ∑∑
∞
=
∞
= nm axn
naxm
mπ
ππ
π
Dq
∑∑
∑∑∞
=
∞
=
∞
=
∞
=
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+
1 1
2
2
2
2
2
2
1 1
2
2
2
2
24
sinsin16
sinsin
m nmn
m nmn
bxn
axm
bn
amA
Dq
bxn
axm
bn
amA
πππ
πππ
Można je po oczywistych przekształceniach doprowadzić do ostatecznej następującej postaci
Warunkiem koniecznym i dostatecznym tego, aby suma niezależnych od siebie składników była równa zeru, jest to, aby każdy składnik był równy zeru
skąd
Wstawiamy Amn (które się zerują dla parzystych m i n) do poszukiwane-go w(x, y) i uzyskujemy ostateczne rozwiązanie zadania
∑∑∞
=
∞
=
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
1 12
2
2
2
2
24 0sinsin116
m nmn b
xna
xmmnD
qbn
amA ππ
ππ
01162
2
2
2
2
24 =−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
mnDq
bn
amAmn π
π
2
2
2
2
26
16
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
bn
ammnD
qAmn
π
( ) ∑∑∞
=
∞
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
=1 1
2
2
2
2
26
sinsin16,
m n
bn
ammn
bxn
axm
Dqyxw
ππ
π
13.6 Płyty kołowe cienkieosiowosymetryczne
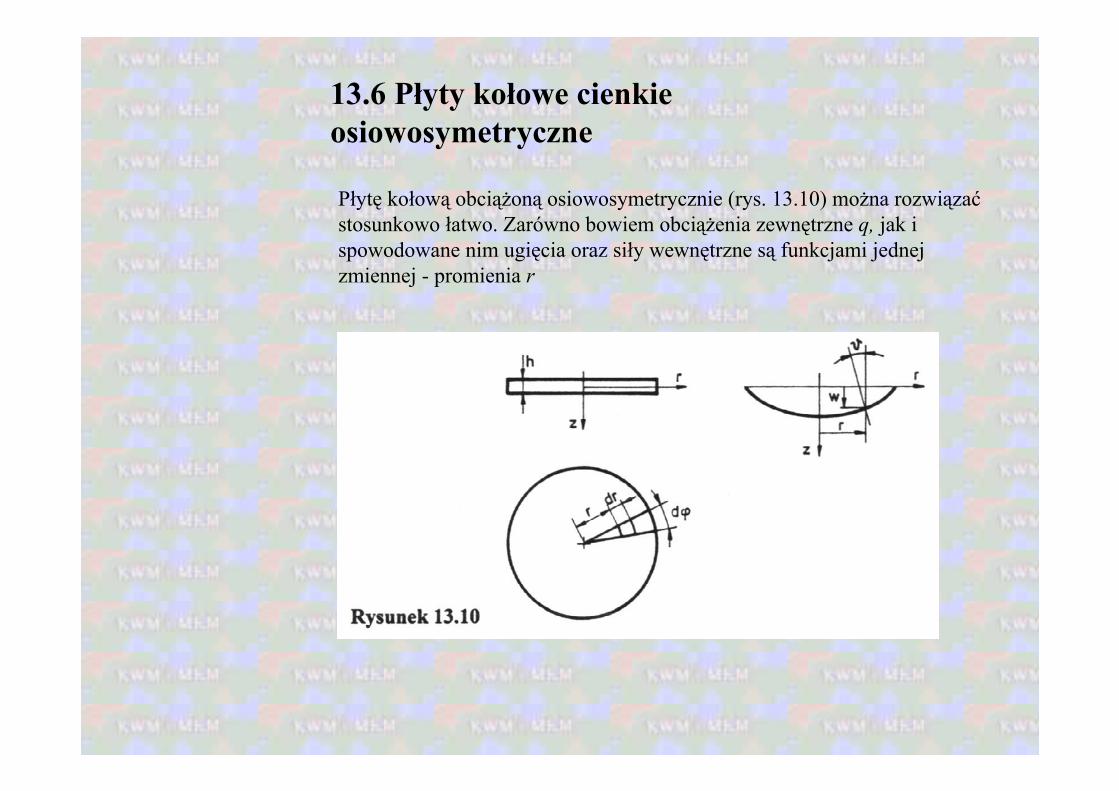
Płytę kołową obciążoną osiowosymetrycznie (rys. 13.10) można rozwiązaćstosunkowo łatwo. Zarówno bowiem obciążenia zewnętrzne q, jak i spowodowane nim ugięcia oraz siły wewnętrzne są funkcjami jednej zmiennej - promienia r
Płaszczyzna środkowa płyty staje się po jej odkształceniu powierzchniąosiowosymetryczną o równaniu w(r). W przyjętym układzie współ-rzędnych walcowych r, ϕ, z między ugięciem w(r) a kątem ugięcia ϑ(r) zachodzi relacja
(13.35)
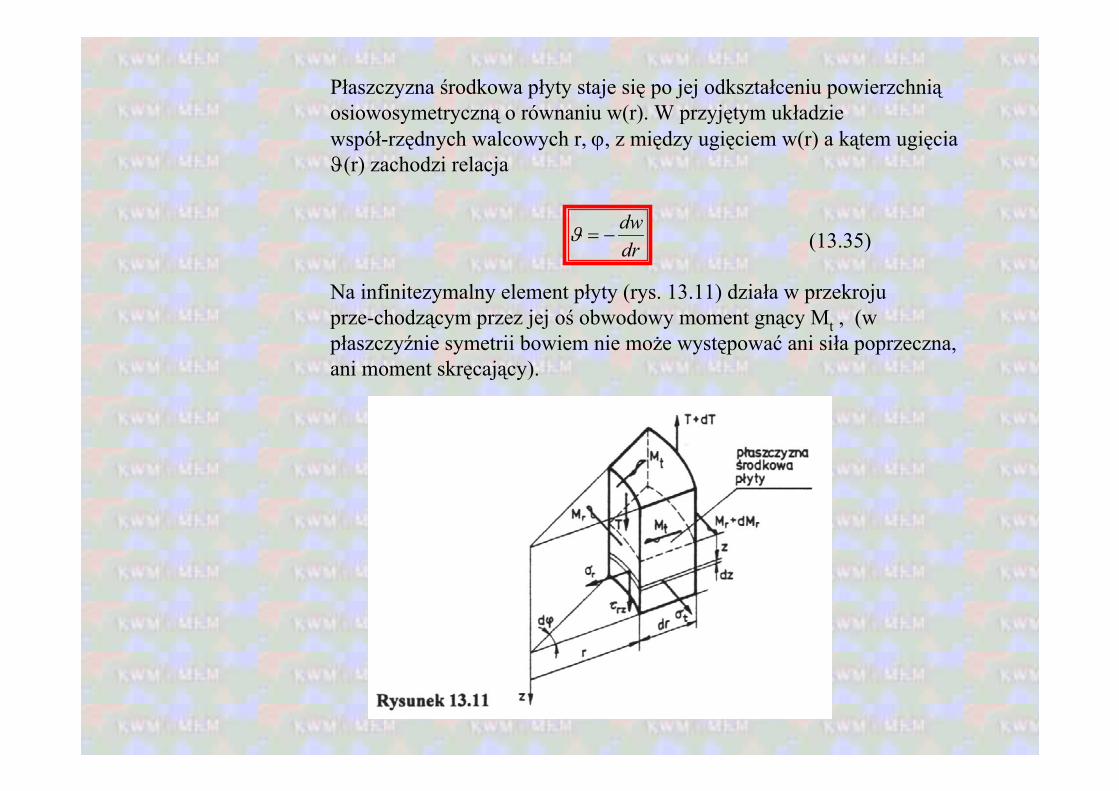
Na infinitezymalny element płyty (rys. 13.11) działa w przekroju prze-chodzącym przez jej oś obwodowy moment gnący Mt , (w płaszczyźnie symetrii bowiem nie może występować ani siła poprzeczna, ani moment skręcający).
drdw
−=ϑ
W przekroju prostopadłym do promienia działa natomiast promieniowy moment gnący Mr, oraz równoległa do osi z siła poprzeczna T. Jeżeli pominąć działanie siły T, to w warstwie o grubości dz, od-ległej o z od płaszczyzny środkowej płyty, panuje płaski osiowosymetryczny stan naprężenia. Określające go naprężenia główne σr, (promieniowe) oraz σt, (obwodowe), jak również odpowiadające im odkształcenia εr εt są funkcjami dwóch zmiennych r i z
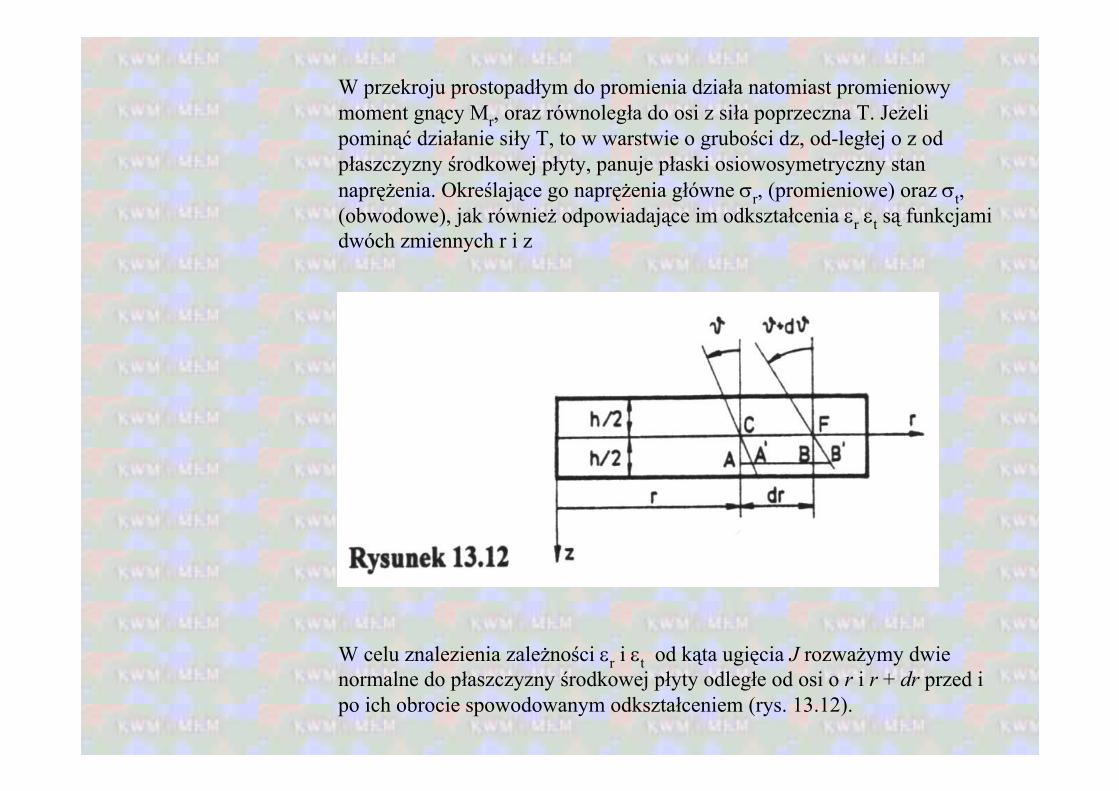
W celu znalezienia zależności εr i εt od kąta ugięcia J rozważymy dwie normalne do płaszczyzny środkowej płyty odległe od osi o r i r + dr przed i po ich obrocie spowodowanym odkształceniem (rys. 13.12).
Odległe o z=CA=FB od płaszczyzny środkowej punkty A i B przemieściły się w położenie A' i B', co spowodowało następujące odkształcenia εr i εt
(13.36)
Na podstawie uogólnionego prawa Hooke'a można określić zależność σri σt , od kąta ugięcia ϑ
(13.37)
(13.38)
( )
( ) ( ) zrr
rzrr
rAAr
zdrd
drzzd
ABAABB
r
r
ϑϑπ
ππε
ϑϑϑϑε
=−+
=−′+
=
=−+
=′−′
=
222
( ) ⎟⎠⎞
⎜⎝⎛ +
−=+
−=
rv
drd
vEzv
vE
trrϑϑεεσ 22 11
( ) ⎟⎠⎞
⎜⎝⎛ +
−=+
−=
drdv
rvEzv
vE
rttϑϑεεσ 22 11
Wzorując się na rozważaniach przeprowadzonych w p. 13.2 (wzory (13.9)), można napisać następujące relacje między Mr i σr oraz Mt i σt
Po wstawieniu do tych równań zależności (13.37) i (13.38), scałkowaniu i uwzględnieniu wzoru (13.11) i (13.12) otrzymujemy momenty gnące Mr,Mt, wyrażone przez kąt ugięcia ϑ
∫∫−−
==2
2
2
2
,
h
hrr
h
hrr zdzdrdrMzdzrdrdM σσϕϕ
Momenty gnące w płycie kołowej
(13.39)
(13.40)
Przy zmianie współrzędnej r o dr moment gnący Mr oraz siła poprzeczna T przyrosną odpowiednio o dMr oraz dT (rys. 13.11). Dla wyodrębnionego z płyty segmentu, który pozostaje w równowadze pod działaniem obciążenia zewnętrznego q(r) oraz sił wewnętrznych Mr(r),Mt(r) i T(r), można napisać dwa warunki równowagi.
⎟⎠⎞
⎜⎝⎛ +=
rv
drdDM r
ϑϑ
⎟⎠⎞
⎜⎝⎛ +=
drdv
rDM t
ϑϑ
Suma rzutów wszystkich sił na oś z jest równa zeru
stąd
(13.41)
( )( ) 0=−−+ drqrdTrddrrdTT ϕϕϕ
( )drTrdqr =
Suma momentów wszystkich sił względem osi leżącej w płaszczyźnie środkowej, stycznej do okręgu o promieniu r jest równa zeru
(dϕ przy Mt wynika z uproszczenia )
( )( ) ( )( ) 02
=+++−−−++ drddrrdTTdrdMdrqdrdrdMddrrdMM trrr ϕϕϕϕϕ
drdMdrdM tt 22
2sin2 ϕϕ
≈
Po uporządkowaniu i odrzuceniu małych wyższego rzędu otrzymuje sięnastępujące równanie
(13.42)( ) TrrMdrdM rt =−
Jeśli wstawimy zależności (13.42) i (13.43) do (13.45), otrzymamy równanie różniczkowe ze względu na kąt ugięcia ϑ
(13.43)DTr
rdrd
drdr −=−+
ϑϑϑ2
2
Równanie różniczkowe kątów ugięcia w płycie kołowej i jego całka
lub w postaci bardziej zwartej
(13.44)
Siła poprzeczna r może być określona z równania (13.41) lub, co jest często łatwiejsze, z warunku równowagi środkowej części płyty o promieniu r.
( )DTr
drd
rdrd
−=⎥⎦⎤
⎢⎣⎡ ϑ1
Kąt ugięcia ϑ wyznacza się przez dwukrotne całkowanie równania różniczkowego (13.47) i wyliczenie stałych całkowania C1, C2 z warunków brzegowych
(13.45)
Po wprowadzeniu wyrażenia (13.45) do (13.35), scałkowaniu i uwzględnieniu warunków brzegowych, otrzymuje się równanie powierzchni ugiętej w(r).
( )∫ ∫−+= drTdrrDrr
CrC 121ϑ
Naprężenia w płycie kołowej
Znając ϑ, wyznacza się z zależności (13.39) i (13.40) momenty gnące Mr iMt .Naprężenia można natomiast wyliczyć z odpowiednio adaptowanych wzorów (13.24), (13,25), i (13.27)
(13.46)
(13.47)
(13.48)
gdzie
2max3
6 ,2
dla ,12hMhz
hzM
IzM r
rrr
r =±=== σσ
2max3
6 ,2
dla ,12hMhz
hzM
IzM t
ttt
t =±=== σσ
hTz
ITS
rzrz 23 ,0 dla , max === ττ
⎟⎟⎠
⎞⎜⎜⎝
⎛−= 2
2
421 zhS
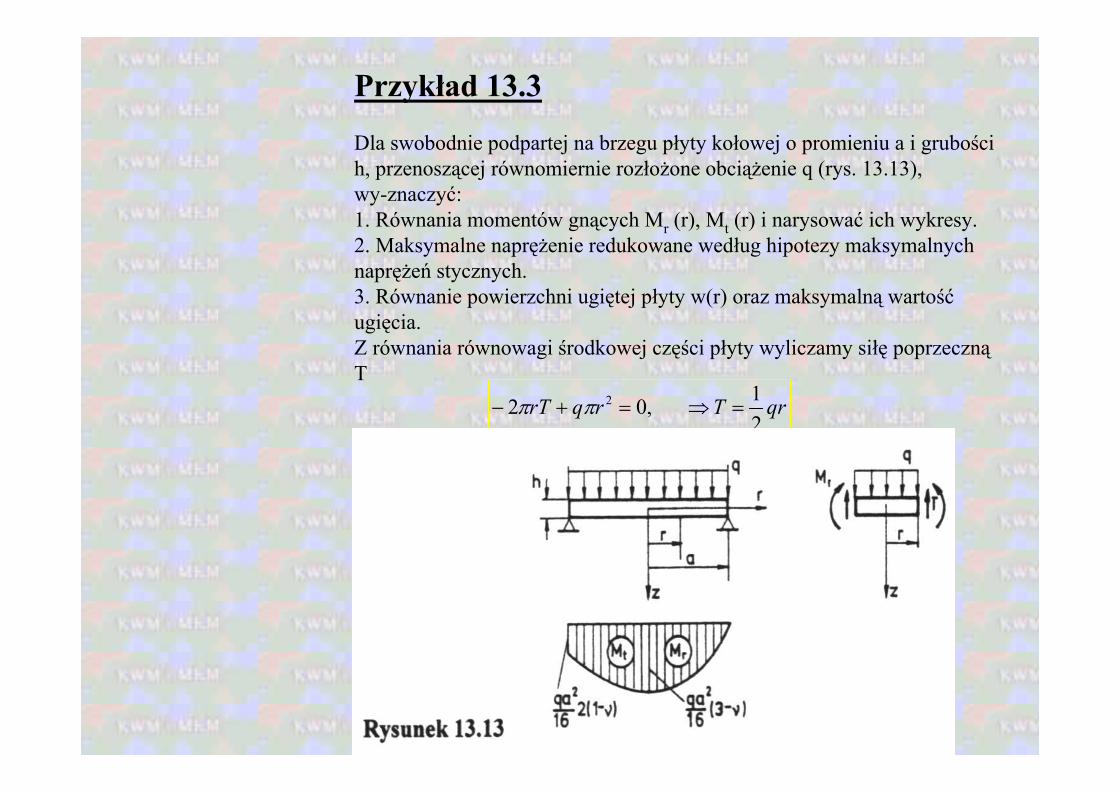
Przykład 13.3
Dla swobodnie podpartej na brzegu płyty kołowej o promieniu a i grubości h, przenoszącej równomiernie rozłożone obciążenie q (rys. 13.13), wy-znaczyć:1. Równania momentów gnących Mr (r), Mt (r) i narysować ich wykresy.2. Maksymalne naprężenie redukowane według hipotezy maksymalnych naprężeń stycznych.3. Równanie powierzchni ugiętej płyty w(r) oraz maksymalną wartośćugięcia.Z równania równowagi środkowej części płyty wyliczamy siłę poprzecznąT
qrTrqrT21 ,02 2 =⇒=+− ππ
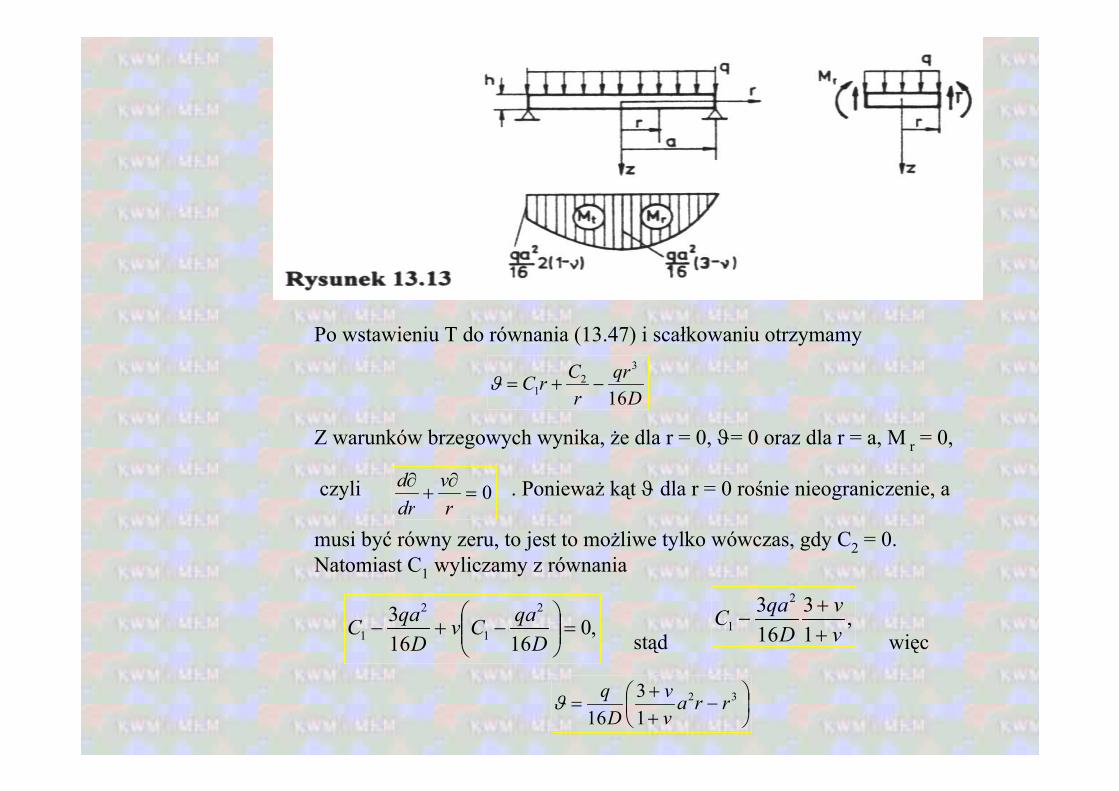
Po wstawieniu T do równania (13.47) i scałkowaniu otrzymamy
Z warunków brzegowych wynika, że dla r = 0, ϑ= 0 oraz dla r = a, M r = 0,
czyli . Ponieważ kąt ϑ dla r = 0 rośnie nieograniczenie, a
musi być równy zeru, to jest to możliwe tylko wówczas, gdy C2 = 0. Natomiast C1 wyliczamy z równania
stąd więc
Dqr
rCrC
16
32
1 −+=ϑ
0=∂
+∂
rv
drd
,01616
3 2
1
2
1 =⎟⎟⎠
⎞⎜⎜⎝
⎛−+−
DqaCv
DqaC ,
13
163 2
1 vv
DqaC
++
−
⎟⎠⎞
⎜⎝⎛ −
++
= 32
13
16rra
vv
Dqϑ
Po wstawieniu ϑ do zależności (13.39) i (13.40) otrzymamy równania momentów gnących
na podstawie których rysujemy wykresy.
Naprężenie redukowane będzie miało największą wartość w środkowym
punkcie dolnej powierzchni płyty (r=0, ).Obliczamy je następująco
( )( ) ( ) ⎟⎠⎞
⎜⎝⎛
++
−+=−+= 2222
3313
16 ,3
16r
vvav
DqMrav
DqM rr
hz21
=
( ) 2
2
31
32
2
2max
2max1max
2maxmax
383
0 ,616
3616
3
hqav
hqav
hM
qavMM
red
rtr
tr
+=−=
=⋅+
=====
+==
σσσ
σσσσσ
Po wstawieniu ϑ do wyrażenia (13.35) i scałkowaniu otrzymamy równanie powierzchni ugiętej płyty
Stałą całkowania C3 wyliczamy z warunku brzegowego: dla r = a, w = 0
stąd
Po wstawieniu C3 równanie powierzchni ugiętej płyty uzyska następującąpostać
Ugięcie w osiąga wartość maksymalną dla r =0 i wynosi
⎟⎟⎠
⎞⎜⎜⎝
⎛+
++
−=h
rravvC
Dqw
4213
16
422
3
0421
316
44
3 =⎟⎟⎠
⎞⎜⎜⎝
⎛+
++
−aa
vvC
Dq
vvaC
++
=15
4
4
3
⎟⎠⎞
⎜⎝⎛ +
++
−++
= 4224
41
13
21
15
41
16rra
vva
vv
Dqw
4max 1
564
avv
Dqw
++
=
13.7 Błonowa teoria powłok osiowosymetrycznych
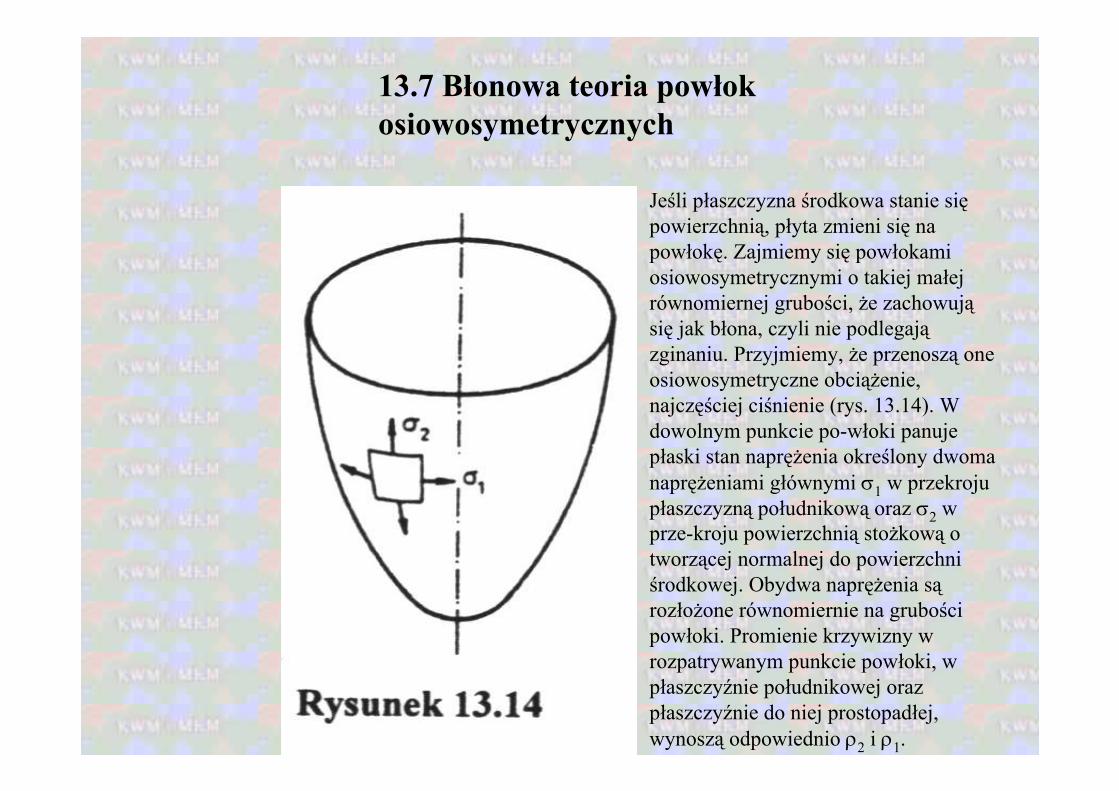
Jeśli płaszczyzna środkowa stanie siępowierzchnią, płyta zmieni się na powłokę. Zajmiemy się powłokami osiowosymetrycznymi o takiej małej równomiernej grubości, że zachowująsię jak błona, czyli nie podlegajązginaniu. Przyjmiemy, że przenoszą one osiowosymetryczne obciążenie, najczęściej ciśnienie (rys. 13.14). W dowolnym punkcie po-włoki panuje płaski stan naprężenia określony dwoma naprężeniami głównymi σ1 w przekroju płaszczyzną południkową oraz σ2 w prze-kroju powierzchnią stożkową o tworzącej normalnej do powierzchni środkowej. Obydwa naprężenia sąrozłożone równomiernie na grubości powłoki. Promienie krzywizny w rozpatrywanym punkcie powłoki, w płaszczyźnie południkowej oraz płaszczyźnie do niej prostopadłej, wynoszą odpowiednio ρ2 i ρ1.
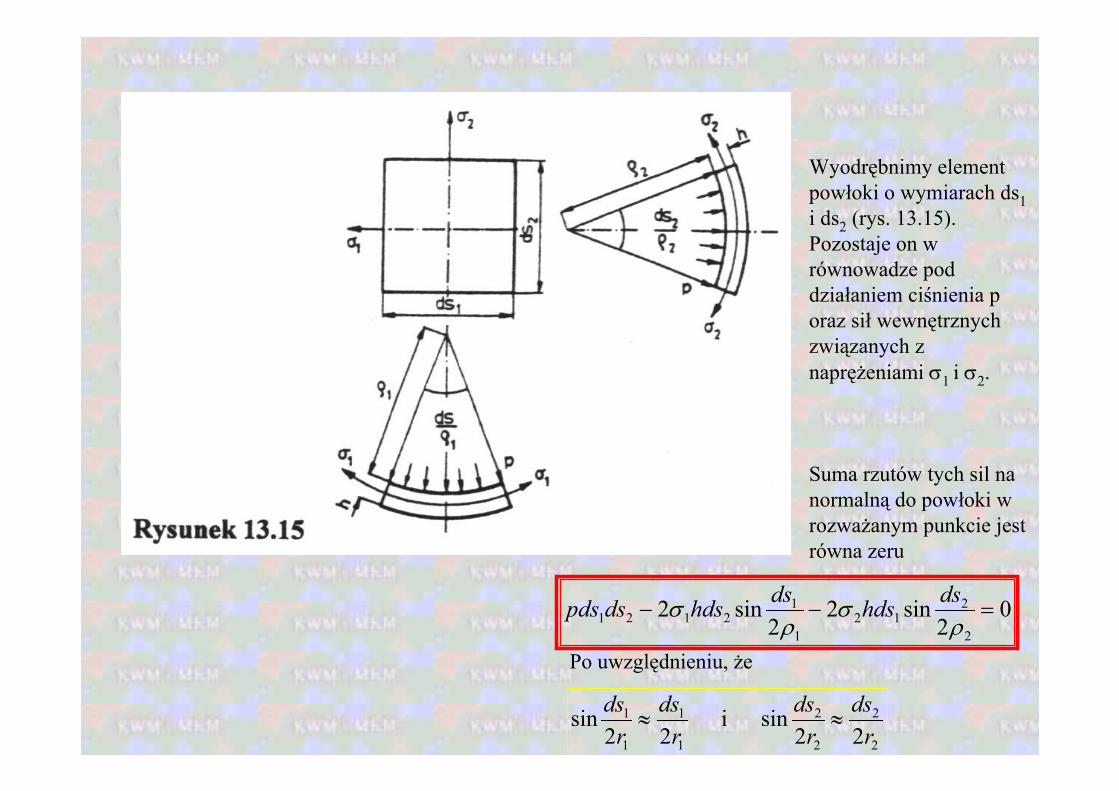
Wyodrębnimy element powłoki o wymiarach ds1i ds2 (rys. 13.15). Pozostaje on w równowadze pod działaniem ciśnienia p oraz sił wewnętrznych związanych z naprężeniami σ1 i σ2.
Suma rzutów tych sil na normalną do powłoki w rozważanym punkcie jest równa zeru
Po uwzględnieniu, że
02
sin22
sin22
212
1
12121 =−−
ρσ
ρσ dshdsdshdsdspds
2
2
2
2
1
1
1
1
22sin i
22sin
rds
rds
rds
rds
≈≈
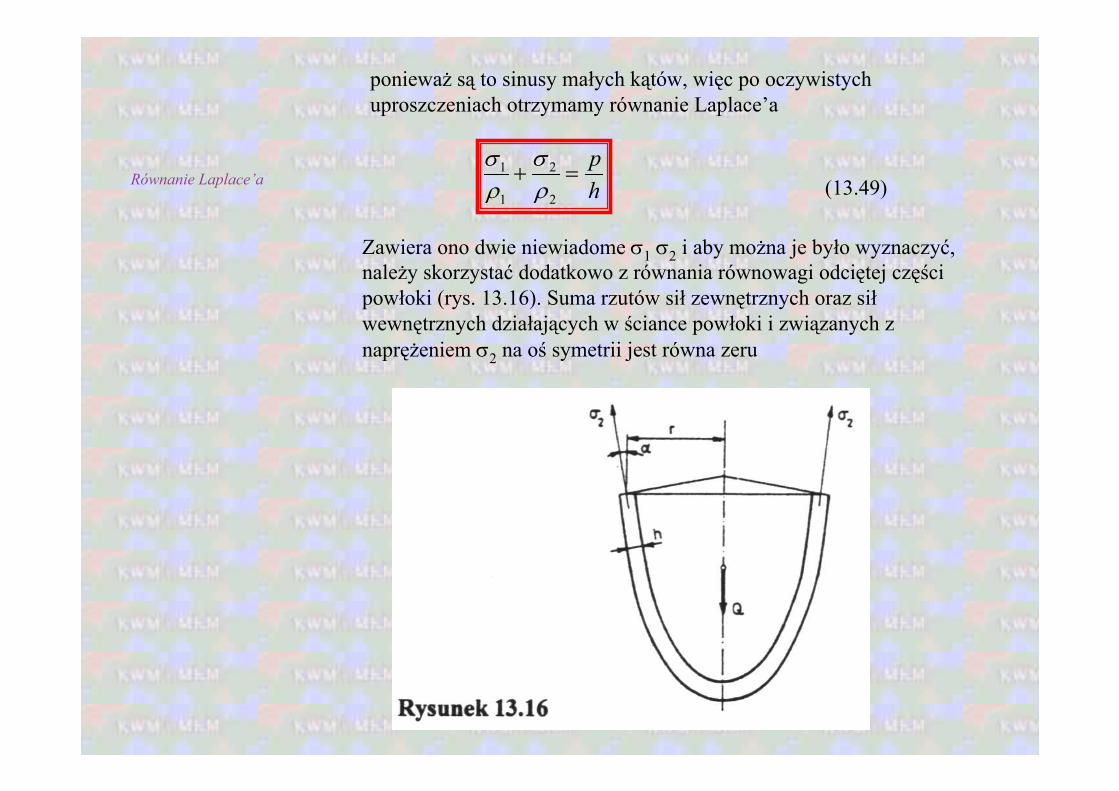
ponieważ są to sinusy małych kątów, więc po oczywistych uproszczeniach otrzymamy równanie Laplace’a
(13.49)hp
=+2
2
1
1
ρσ
ρσ
Równanie Laplace’a
Zawiera ono dwie niewiadome σ1 σ2 i aby można je było wyznaczyć, należy skorzystać dodatkowo z równania równowagi odciętej części powłoki (rys. 13.16). Suma rzutów sił zewnętrznych oraz siłwewnętrznych działających w ściance powłoki i związanych z naprężeniem σ2 na oś symetrii jest równa zeru
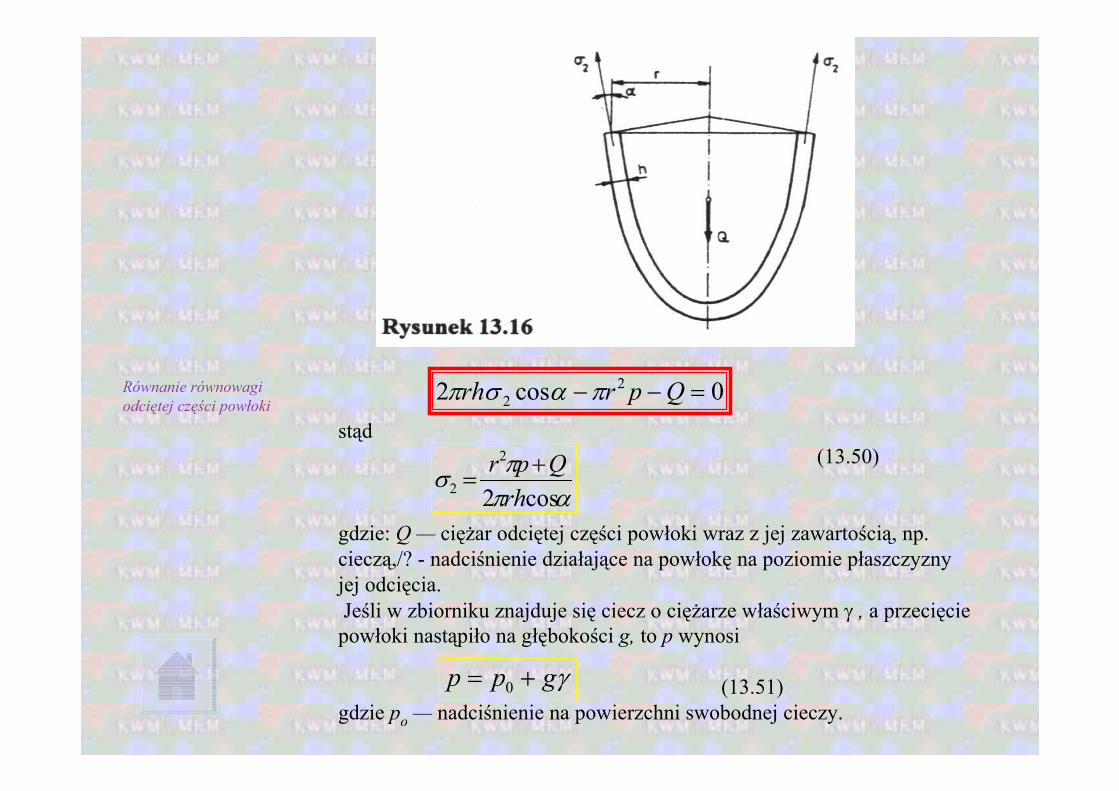
Równanie równowagi odciętej części powłoki
stąd(13.50)
gdzie: Q — ciężar odciętej części powłoki wraz z jej zawartością, np. cieczą,/? - nadciśnienie działające na powłokę na poziomie płaszczyzny jej odcięcia.Jeśli w zbiorniku znajduje się ciecz o ciężarze właściwym γ , a przecięcie
powłoki nastąpiło na głębokości g, to p wynosi
(13.51)gdzie po — nadciśnienie na powierzchni swobodnej cieczy.
αππσ
cos2
2
2 rhQpr +
=
γgpp += 0
0cos2 22 =−− Qprrh πασπ
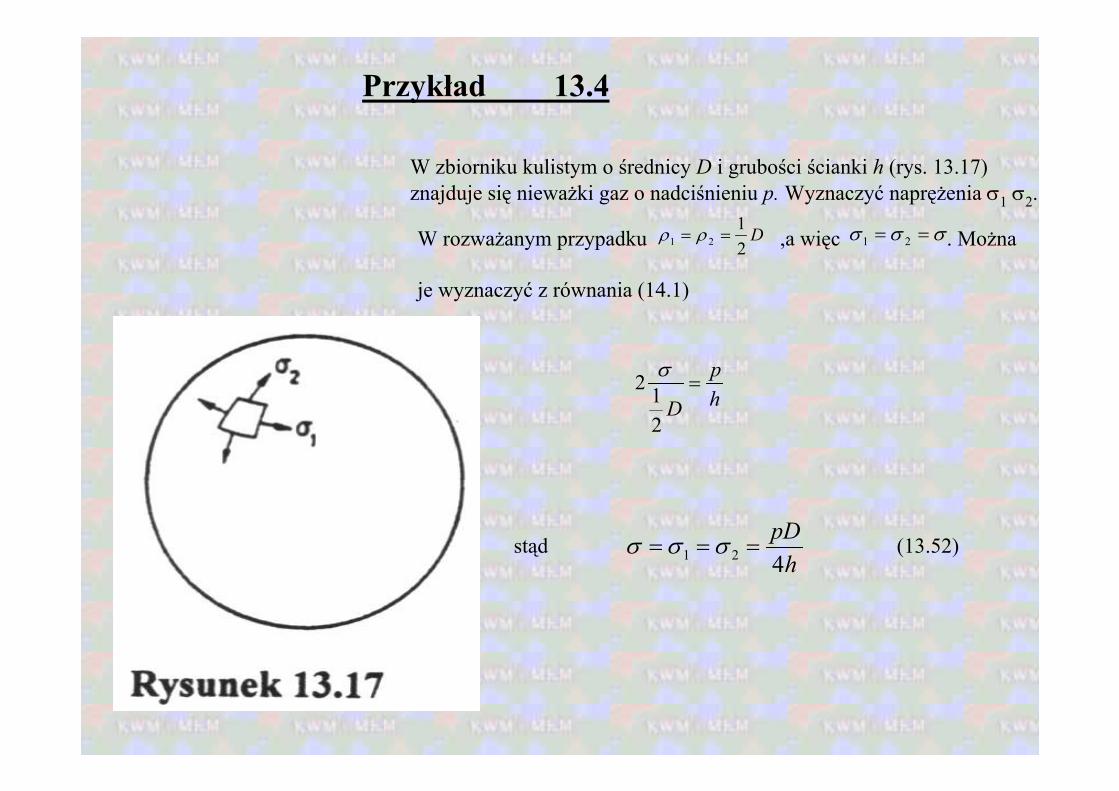
Przykład 13.4
W zbiorniku kulistym o średnicy D i grubości ścianki h (rys. 13.17) znajduje się nieważki gaz o nadciśnieniu p. Wyznaczyć naprężenia σ1 σ2.
W rozważanym przypadku ,a więc . Można
je wyznaczyć z równania (14.1)
stąd (13.52)
D21
21 == ρρ σσσ == 21
hp
D=
212 σ
hpD421 === σσσ
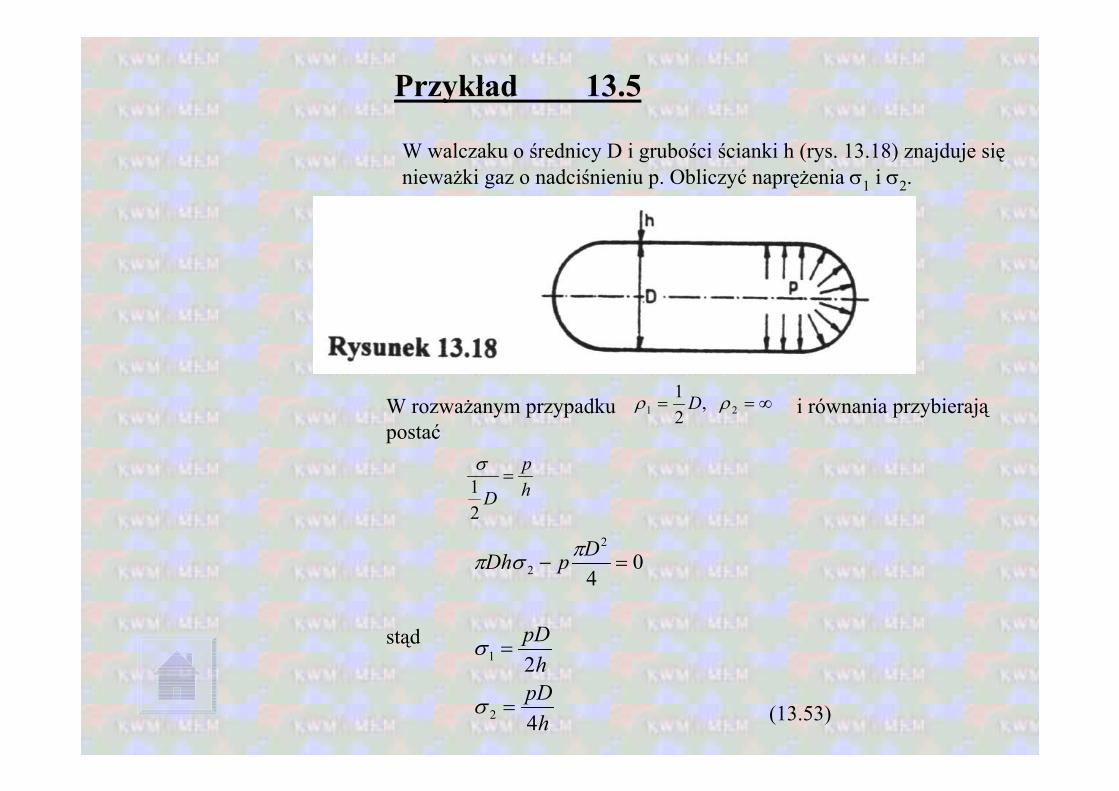
Przykład 13.5
W walczaku o średnicy D i grubości ścianki h (rys. 13.18) znajduje sięnieważki gaz o nadciśnieniu p. Obliczyć naprężenia σ1 i σ2.
W rozważanym przypadku i równania przybierająpostać
stąd
(13.53)
∞== 21 ,21 ρρ D
hp
D=
21σ
04
2
2 =−DpDh πσπ
hpDh
pD
4
2
2
1
=
=
σ
σ
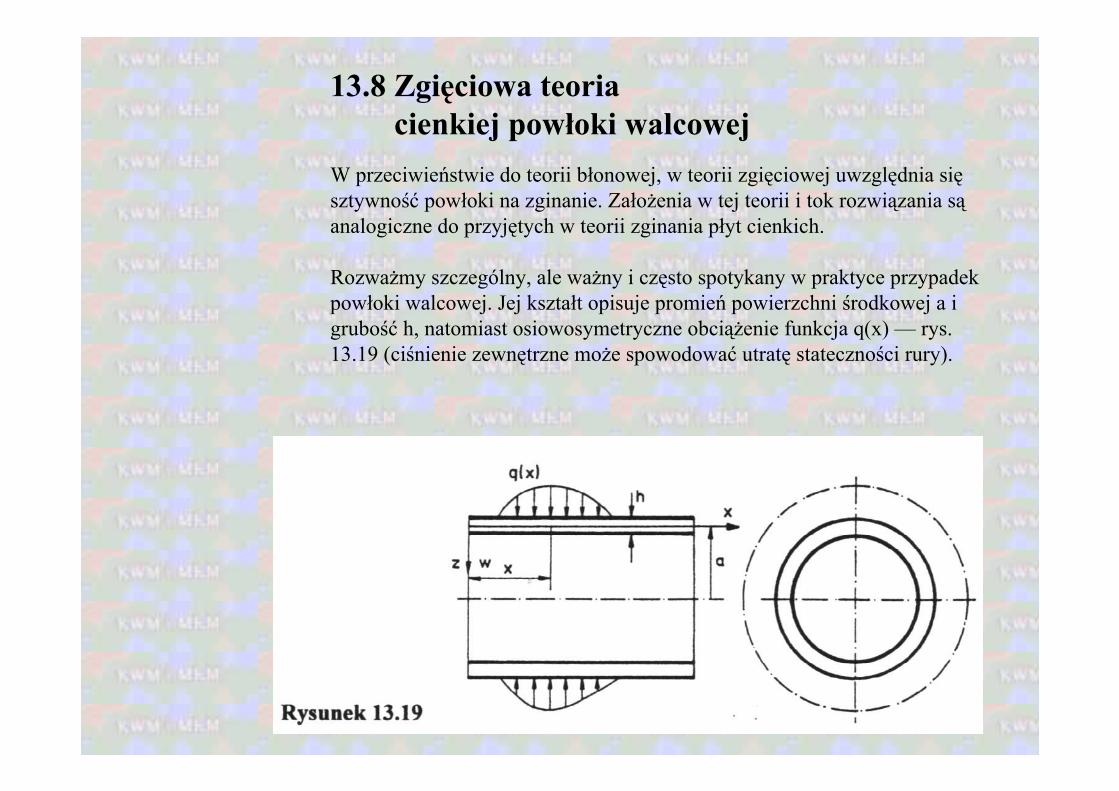
13.8 Zgięciowa teoria cienkiej powłoki walcowej
W przeciwieństwie do teorii błonowej, w teorii zgięciowej uwzględnia sięsztywność powłoki na zginanie. Założenia w tej teorii i tok rozwiązania sąanalogiczne do przyjętych w teorii zginania płyt cienkich.
Rozważmy szczególny, ale ważny i często spotykany w praktyce przypadek powłoki walcowej. Jej kształt opisuje promień powierzchni środkowej a i grubość h, natomiast osiowosymetryczne obciążenie funkcja q(x) — rys. 13.19 (ciśnienie zewnętrzne może spowodować utratę stateczności rury).
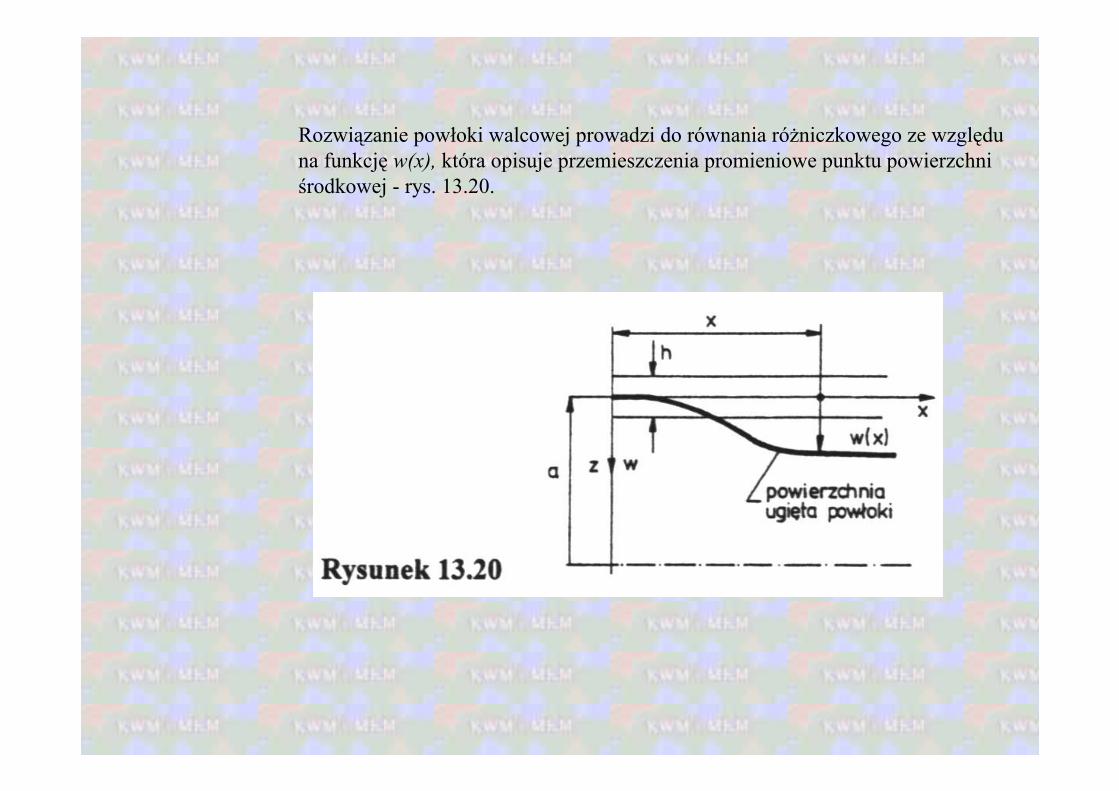
Rozwiązanie powłoki walcowej prowadzi do równania różniczkowego ze względu na funkcję w(x), która opisuje przemieszczenia promieniowe punktu powierzchni środkowej - rys. 13.20.
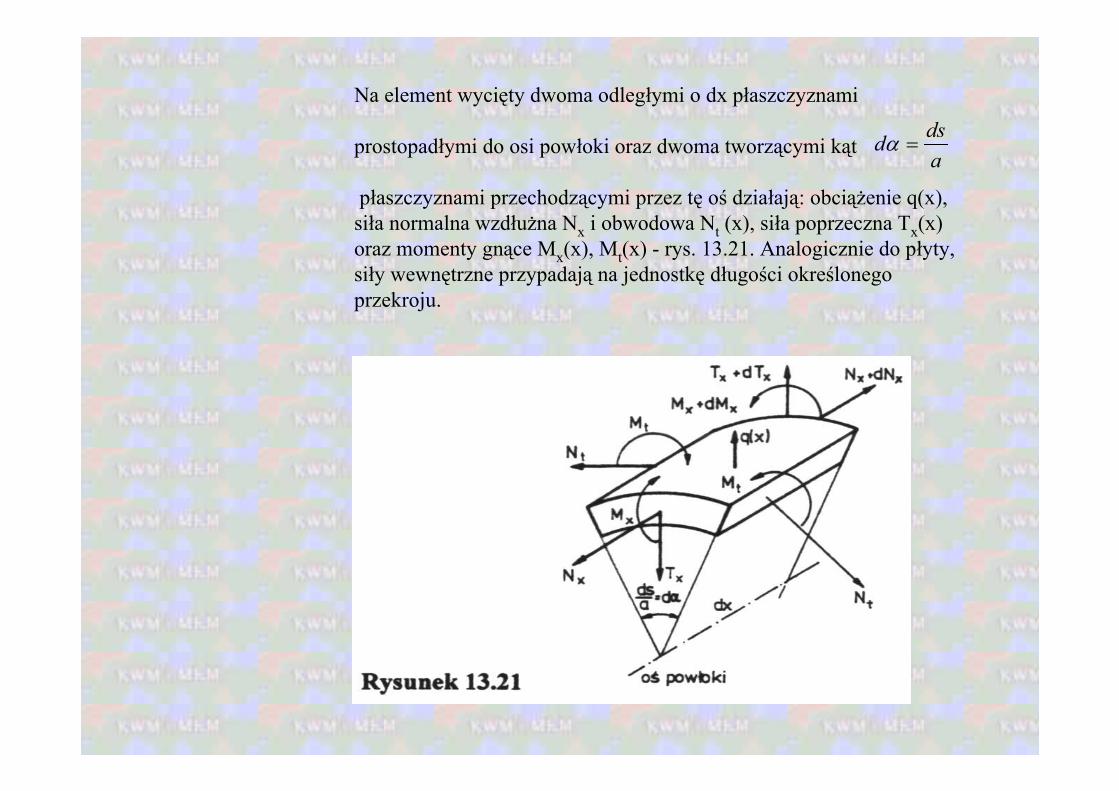
Na element wycięty dwoma odległymi o dx płaszczyznami
prostopadłymi do osi powłoki oraz dwoma tworzącymi kąt
płaszczyznami przechodzącymi przez tę oś działają: obciążenie q(x), siła normalna wzdłużna Nx i obwodowa Nt (x), siła poprzeczna Tx(x) oraz momenty gnące Mx(x), Mt(x) - rys. 13.21. Analogicznie do płyty, siły wewnętrzne przypadają na jednostkę długości określonego przekroju.
adsd =α
Rozważać będziemy równowagę układu sił zewnętrznych i wewnętrznych działających na element powłoki (rys. 13.21).
Z warunku rzutów sił na oś x (czyli na kierunek tworzącej powierzchni środkowej) wynika, że dNx = 0. Oznacza to, że jeśli nie ma składowych siłzewnętrznych o kierunku x, to Nx = const i określają obciążenie zewnętrzne przyłożone na końcach powłoki.
Na podstawie warunku rzutów sil na kierunek promieniowy można ustalićnastępującą zależność
(13.54)
W wyprowadzeniu uwzględniono, że .
( ) ( ) 02
2 =−+++ dsTdsdTTdsdxxqddxN xxxtα
( )xqaN
dxdT tx −=+
adsdd222
sin ≈≈αα
Natomiast z warunku momentów względem prostej stycznej do linii środkowej, leżącej w płaszczyźnie normalnej do osi x, wynika zależność taka jak dla belki zginanej
(13.55)xx T
dxdM
=
Traktując element wycięty dwoma płaszczyznami tworzącymi kąt da wzdłuż
całej powłoki podobnie jak wyodrębnioną z płyty o sztywności
belkę, w przekroju której działa moment gnący Mx(przypadający na jednostkę szerokości belki), można sformułowaćnastępujące równanie
(13.56)
( )2
3
112 vEhD−
=
DM
dxwd x−=2
2
Z formuł (13.56) i (13.55) wynikają zależności
(13.57)3
3
x2
2
T ,dx
wdDdx
wdDM x −=−=
Ponieważ odkształcenie obwodowe w warstwie środkowej elementu
, więc korzystając z prawa Hooke’a, można
określić siłę obwodową Nt
(13.58)
( )aw
adaddwa
t −=−−
=α
ααε
wa
EhhEhN tt −=== 1εσ
Równanie przemieszczenia promieniowego powłoki walcowej i jego całka (13.59)
gdzie
(13.60)
Dqw
dxwd
=+ 44
4
4β
( )22
2
24 13
4 hav
DaEh −
==β
Po dwukrotnym zróżniczkowaniu zależności (13.56) względem x i za-stosowaniu wzorów (13.54), (13.55) oraz (13.50) otrzymuje się równa-nie różniczkowe ze względu na przemieszczenie promieniowe po-wierzchni środkowej powłoki w(x)
Całka ogólna równania (13.59) jest sumą całki ogólnej równania jedno-rodnego przy q = 0 i całki szczególnej w1 równania niejednorodnego przy
(13.61)
gdzie: C1, C2, C3, C4 - stałe całkowania, które należy wyznaczyć z warunków brzegowych.
Znając w(x), wyznacza się siły wewnętrzne ze wzorów (13.57) i (13.58) przy uwzględnieniu, że
(13.62)a następnie oblicza naprężenia.
0≠q
2
2
dxwdvDvMM xt =−=
( ) ( ) ( ) 14321 coscoscoscos wxCxCexCxCexw xx ++++= − ββββ ββ
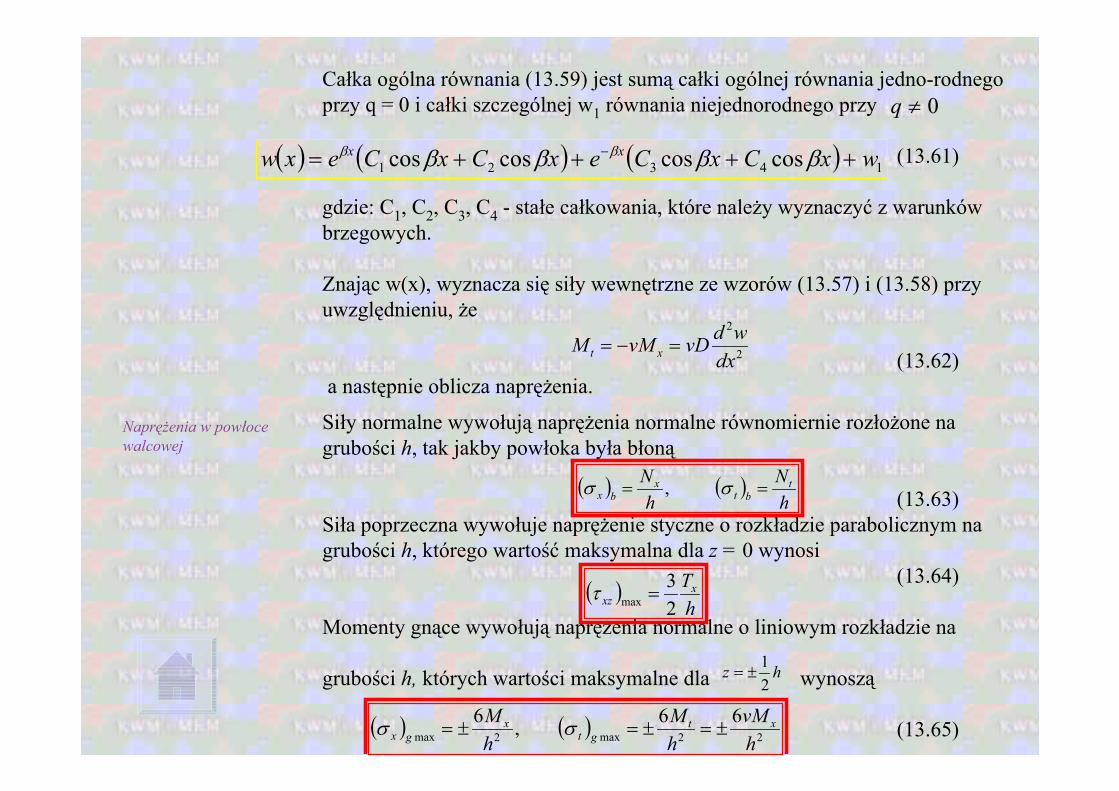
Naprężenia w powłoce walcowej
Siły normalne wywołują naprężenia normalne równomiernie rozłożone na grubości h, tak jakby powłoka była błoną
(13.63)Siła poprzeczna wywołuje naprężenie styczne o rozkładzie parabolicznym na grubości h, którego wartość maksymalna dla z = 0 wynosi
(13.64)
Momenty gnące wywołują naprężenia normalne o liniowym rozkładzie na
grubości h, których wartości maksymalne dla wynoszą
(13.65)
( ) ( )hN
hN t
btx
bx == σσ ,
( )hTx
xz 23
max =τ
hz21
±=
( ) ( ) 22max2max66 ,6
hvM
hM
hM xt
gtx
gx ±=±=±= σσ
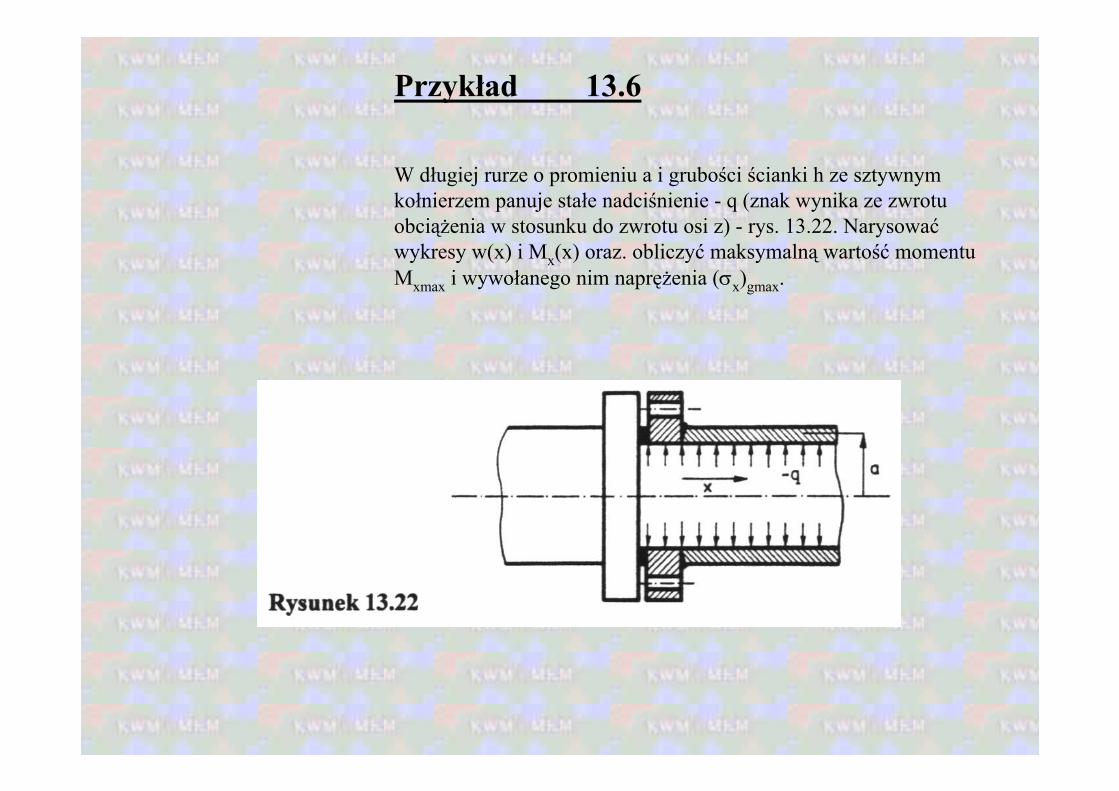
Przykład 13.6
W długiej rurze o promieniu a i grubości ścianki h ze sztywnym kołnierzem panuje stałe nadciśnienie - q (znak wynika ze zwrotu obciążenia w stosunku do zwrotu osi z) - rys. 13.22. Narysowaćwykresy w(x) i Mx(x) oraz. obliczyć maksymalną wartość momentuMxmax i wywołanego nim naprężenia (σx)gmax.
Nietrudno sprawdzić, że całka szczególna równania (13.59) wobec q = const ma postać
(13.66)
a więc całkę ogólną można zapisać następująco
(13.67)
Ehqa
Dqwt
2
44−=
−=
β
( ) ( ) ( )D
qxCxCexCxCexw xx44321 4
coscoscoscosβ
ββββ ββ −+++= −
Przy x zwiększającym się w(x) powinno zmierzać do wartości stałej wynikającej z błonowej teorii powłok, a tymczasem pierwszy składnik zwiększa sięnieograniczenie. Musi zatem być C1 = C2 = 0. Dla x = O,
w = 0 i , co umożliwia wyliczenie C3 i C40=dxdw
Ehqa
DqCC
2
443 4−
=−
==β
Rozwiązanie uzyskuje ostatecznie formę
( ) ( )[ ]xxeEhqaxw x βββ sincos1
2
+−−
= −
a moment gnący Mx w myśl zależności (13.23) wynosi
( ) ( )
( ) ( )xxev
qah
xxeEhqaDxM
x
xx
ββ
βββ
β
β
sincos132
sincos2
2
22
+−
=
=+=
−
−
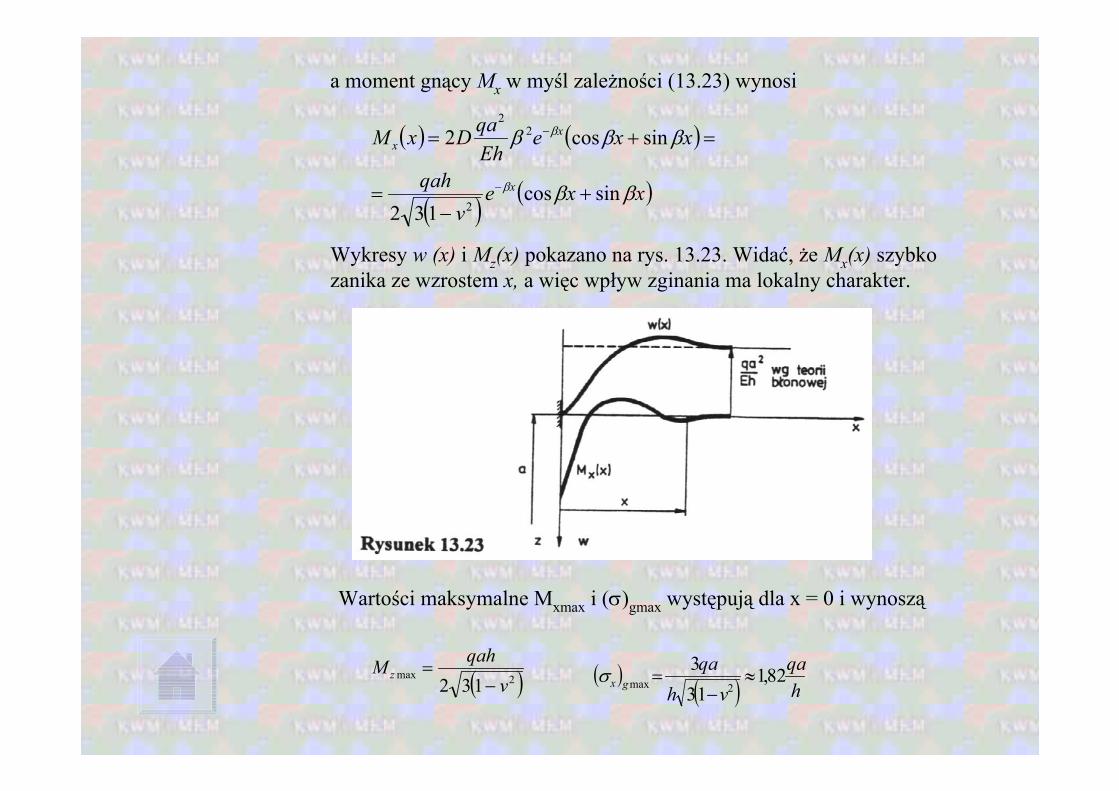
Wykresy w (x) i Mz(x) pokazano na rys. 13.23. Widać, że Mx(x) szybko zanika ze wzrostem x, a więc wpływ zginania ma lokalny charakter.
Wartości maksymalne Mxmax i (σ)gmax występują dla x = 0 i wynoszą
( )2max132 v
qahM z−
= ( ) ( ) hqa
vhqa
gx 82,113
32max ≈
−=σ

13.9 Metoda elementów skończonych dla płyt i powłok
13.9.1 Metoda elementów skończonych dla płyt
Ugięcie płyty o dowolnym kształcie jest określone równaniem (por. (13.20))
(13.68) ( ) ( ) ( ) ( ) ( ) Ω∈=∂
∂+
∂∂∂
+∂
∂ yxyxqy
yxwDyx
yxwDx
yxwD , ,,,,2,4
4
22
4
4
4
Równanie to należy uzupełnić odpowiednimi warunkami brzegowymi na ∂Ω=Γ. Typowe warunki brzegowe przedstawiono w p. 13.5.
Znając ugięcie w(x, y), można obliczyć odkształcenia i naprężenia w płycie. Stan naprężenia w płycie jest określony przez siły wewnętrzne. Wprowadźmy macierze kolumnowe uogólnionych naprężeń i odkształceń
Macierze kolumnowe uogólnionych naprężeńi odkształceń
(13.69)
(13.70)
gdzie: κx κy - funkcje krzywizn, χ - funkcja zwichrzenia.
( ){ }( )( )( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=yxMyxMyxM
yx
xy
y
x
,,,
,σ
( ){ }( )( )( )
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂∂
−
∂∂
−
∂∂
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
yxw
yw
xw
yxyxyx
yx y
x
2
2
2
2
2
2,2,,
,χκκ
ε
Związki fizyczne są teraz określone następująco
(13.71)
gdzie macierz sprężystości ma postać
(13.72)
{ } [ ]{ }εσ D=
[ ] ( ) ( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
=2/100
0101
112 2
3
vv
v
vEhD
Zastosowanie metody elementów skończonych do wyznaczenia ugięćpłyty w(x,y) polega w pierwszym etapie na podziale dwuwymiarowego obszaru Ω na elementy skończone Ω', e= 1,2,..., N. Podobnie jak w przypadku dwuwymiarowych zagadnień brzegowych teorii sprężystości przy dyskretyzacji płyty możemy stosować elementy trójkątne lub prostokątne (rys. 13.24).

Równanie (13.68) jest spełnione na elemencie w sposób przybliżony. Całka ważona określona na elemencie skończonym Ωe ma postać
(13.73)
gdzie v = v(x, y) jest funkcją wagi.
∫Ω
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
+∂∂
∂+
∂∂
e
dxdyqywD
yxwD
xwDv 02 4
4
22
4
4
4
Sformułowanie słabe dla płyty.
Całkując wyrażenie (13.73) przez części, otrzymujemy sformułowanie słabe dla płyty
(13.74)
gdzie nx i ny są kosinusami kierunkowymi normalnej do brzegu.
( ) ( ) 0
2 4
4
2
222
4
4
2
2
=⎥⎦
⎤⎢⎣
⎡+
∂∂
++∂∂
+
+⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂
∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
−
−⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
∂∂
+∂∂
∂∂∂
∂+
∂∂
∂∂
∫
∫
∫
Γ
Γ
Ω
dsnMnMyvnMnM
xv
dsny
Mx
Mn
yM
xMv
dxdyvqyw
yvD
yxw
yxvD
xw
xvDv
e
e
e
yyxyxyxyxx
yyyx
xxyx
Warto zauważyć, co jest typowe dla sformułowania słabego, że w zależności (13.74) zostały obniżone wymagania związane z różniczkowalnością ugięcia w(x,y). Pochodne funkcji wagi względem współ-rzędnych x i y zamienimy na pochodne względem lokalnych współ-rzędnych: normalnej n i stycznej s
(13.75)
Korzystając z zależności (13.75), możemy całki brzegowe w sformułowaniu słabym (13.74) przekształcić do postaci
(13.76)
yxyx nnvn
sv
yvn
svn
nv
xv
∂∂
−∂∂
=∂∂
∂∂
−∂∂
=∂∂ ,
∫ ∫Γ Γ
⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+−e e
dsMsvM
nvdsvT nsnn
gdzie:
(13.77)
Całkując przez części drugi składnik w drugiej całce (13.76), otrzymujemy
(13.78)
gdzie jest reakcją będącą ekwiwalentem siły poprzecznej Tn
i momentu skręcającego Mns na brzegu.
( ) ( )22
22 2
yxxyyxxyns
yxxyyyxxn
yyxxn
nnMnnMMM
nnMnMnMM
nTnTT
−+−=
++=
+=
∫Γ
⎟⎠⎞
⎜⎝⎛ −∂∂ dsvVMnv
nn
sM
TV nsnn ∂
∂+=
W sformułowaniu słabym (13.74) występujące drugie pochodne ugięć i funkcje interpolacyjne powinny być tak dobrane, aby na granicach sąsia-dujących elementów osiągnąć ciągłość ugięć i ich pierwszych pochodnych.
Przyjmując jako parametry węzłowe kąty obrotów i ,
można wymusić spełnienie tego warunku w punktach węzłowych. xw
y ∂∂
=ϑyw
x ∂∂
−=ϑ
Przyjmijmy następującą aproksymację ugięć płyty na elemencie skończonym
(13.79)
gdzie , j = l, 2,..., n, są uogólnionymi przemieszczeniami węzłowymi, które w k-tym węźle są zestawione w macierz kolumnową
(13.80)
( ) ( ) [ ] { }∑ ∑= =
ΔΨ=ΨΔ≈n
j
A
kk
ek
eej
ej
e yxyxw1 1
,,
ejΔ
{ }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=Δeyk
exk
ek
ke
w
ϑϑ
, j= l, 2,..., n, są funkcjami interpolacyjnymi zestawionymi dla każdego k-tego węzła w macierz wierszową zawierającą trzy elementy. ejΨ
[ ]keΨ
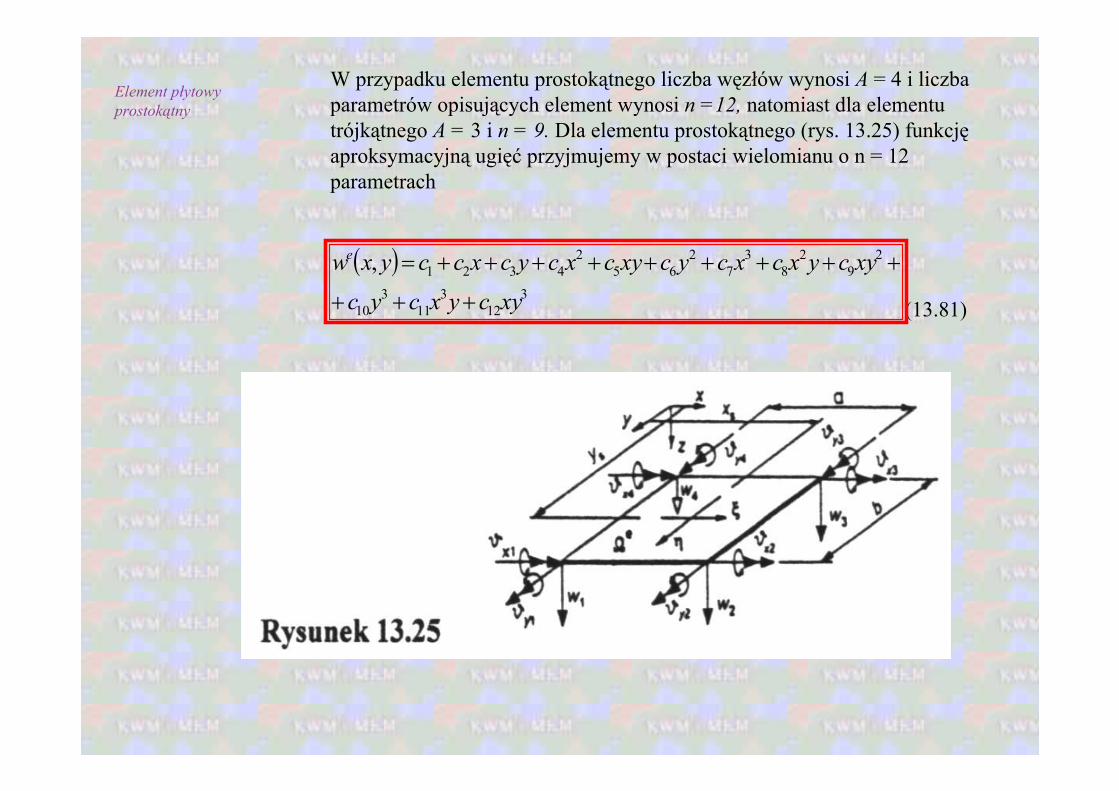
Element płytowy prostokątny
W przypadku elementu prostokątnego liczba węzłów wynosi A = 4 i liczba parametrów opisujących element wynosi n =12, natomiast dla elementu trójkątnego A = 3 i n = 9. Dla elementu prostokątnego (rys. 13.25) funkcjęaproksymacyjną ugięć przyjmujemy w postaci wielomianu o n = 12 parametrach
(13.81)
( )3
123
113
10
29
28
37
265
24321,
xycyxcyc
xycyxcxcycxycxcycxccyxwe
+++
+++++++++=
( ) ( ) 39
38
227
265
24321, ycxcxyyxcycxycxcycxccyxwe +++++++++=
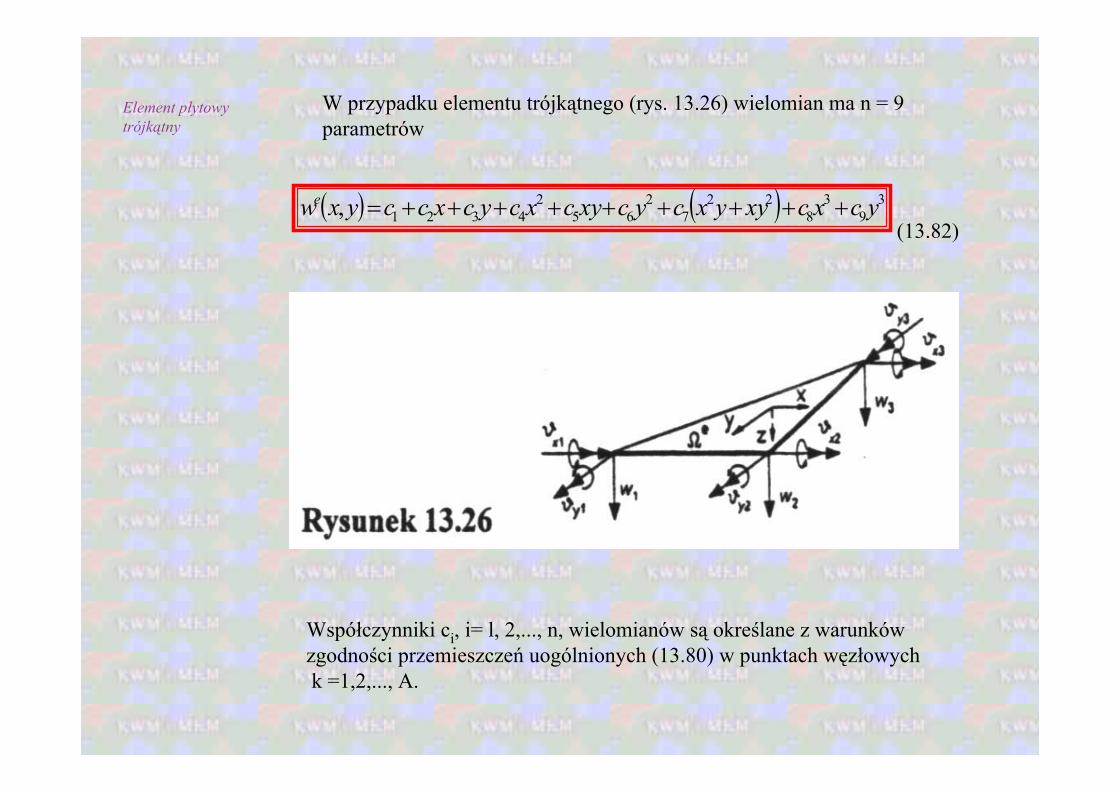
W przypadku elementu trójkątnego (rys. 13.26) wielomian ma n = 9 parametrów
(13.82)
Element płytowy trójkątny
Współczynniki ci, i= l, 2,..., n, wielomianów są określane z warunków zgodności przemieszczeń uogólnionych (13.80) w punktach węzłowychk =1,2,..., A.
Funkcje interpolacyjne dla elementu płytowego prostokątnego
Funkcje interpolacyjne dla elementu prostokątnego można przedstawić w postaci
(13.83)
gdzie
są bezwymiarowymi współrzędnymi lokalnymi na elemencie skończoym.
[ ] ( )( )( )( ) ( )( )( )( ) ( )]111
,111
,211[21
2
2
22
−++
+−+
++++++=Ψ
kkkk
kkkk
kkkkke
b
a
ηηηηξξη
ηηξξξξξ
ηξηηξξηηξξ
byy
axx ss −
=−
= ηξ ,
Funkcje interpolacyjne dla elementu płytowego trójkątnego
W przypadku elementu trójkątnego funkcje interpolacyjne przyjmują postać
(13.84)
gdzie
[ ]( ) ( )( ) ( ),5,05,0
,5,05,0
,[
212
212112
2
212
212112
2
21
212
21
2
++++++++
++++++++
++++
+−+
+−+
−−++=Ψ
kkkkkkkkkkkk
kkkkkkkkkkkk
kkkkkkkkkke
LLLLLcLLLLLc
LLLLLbLLLLLb
LLLLLLLLL
12
21
1221
2
++
++
++++
−=−=
−=
++=
kkk
kkk
kkkkk
e
kkkk
xxcyyb
yxyxaA
ycxbaL
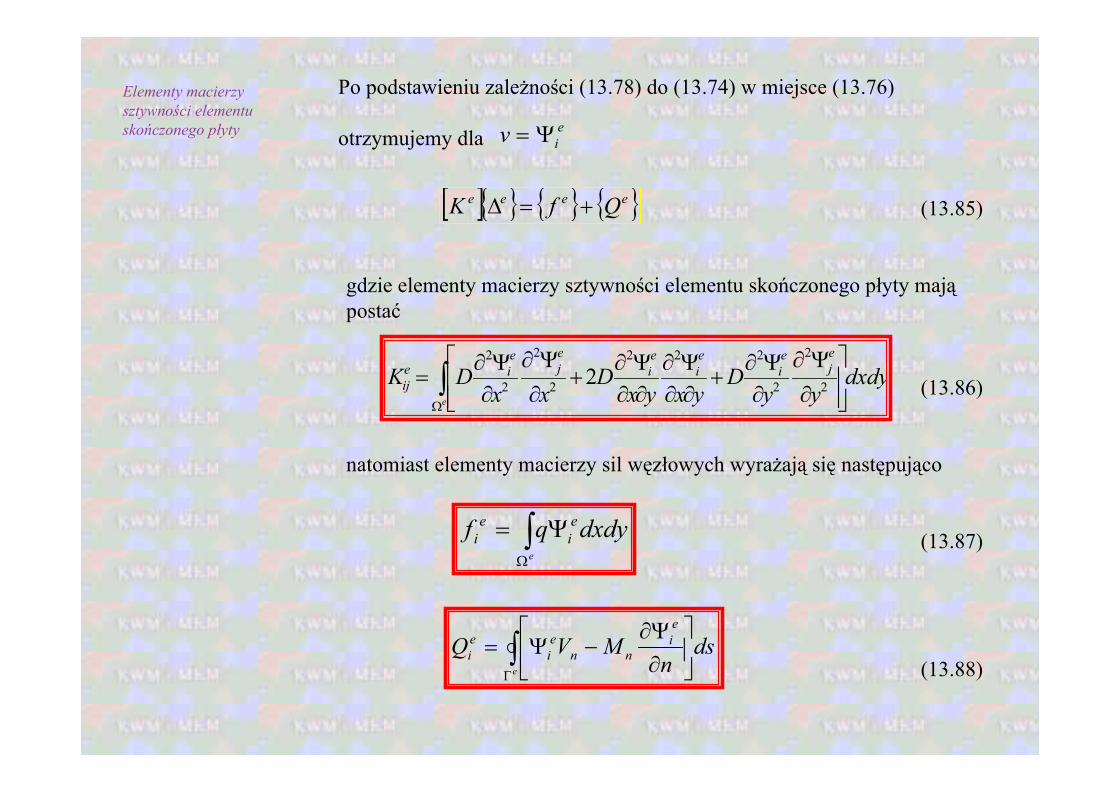
Po podstawieniu zależności (13.78) do (13.74) w miejsce (13.76)
otrzymujemy dla eiv Ψ=
(13.85)
gdzie elementy macierzy sztywności elementu skończonego płyty mająpostać
(13.86)
natomiast elementy macierzy sil węzłowych wyrażają się następująco
(13.87)
(13.88)
[ ]{ } { } { }eeee QfK +=Δ
dxdyyy
Dyxyx
Dxx
DKe
ej
ei
ei
ei
ej
eie
ij ∫Ω ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
∂Ψ∂
∂Ψ∂
+∂∂Ψ∂
∂∂Ψ∂
+∂Ψ∂
∂Ψ∂
= 2
2
2
222
2
2
2
2
2
∫Ω
Ψ=e
dxdyqf ei
ei
∫Γ
⎥⎦
⎤⎢⎣
⎡∂Ψ∂
−Ψ=e
dsn
MVQei
nnei
ei
Elementy macierzy sztywności elementu skończonego płyty
Znając wartości węzłowe ugięć, można teraz obliczyć odkształcenia
(13.89)
gdzie macierz geometryczna ma postać
(13.90)
Naprężenia obliczamy następująco
(13.91)
{ } [ ] { }ke
ke B Δ=ε
[ ]
[ ][ ]
[ ]⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂Ψ∂
−
∂Ψ∂
−
∂Ψ∂
−
=
yx
y
x
B
ke
ke
ke
k
2
2
2
2
2
{ } [ ]{ } [ ][ ] { }ke
keeee BDD Δ== εσ
Macierz sztywności [Ke} ma wymiary n x n, czyli 12 x 12 dla elementu prostokątnego i 9 x 9 dla elementu trójkątnego płyty. Macierz ta może byćprzedstawiona także w innej postaci niż (13.86)
Macierz sztywności elementu płytowego
(13.92)
przy czym
(13.93)
[ ] [ ] [ ][ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
∫Ω
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
==e
eeee
eeee
eeee
eeee
eTee
KKKKKKKKKKKKKKKK
dxdyBDBK
44434241
34333231
24232221
14131211
[ ] [ ] [ ][ ]∫Ω
=e
dxdyBDBK lTkkl
e
13.9.2 Metoda elementów skończonych dla powłok
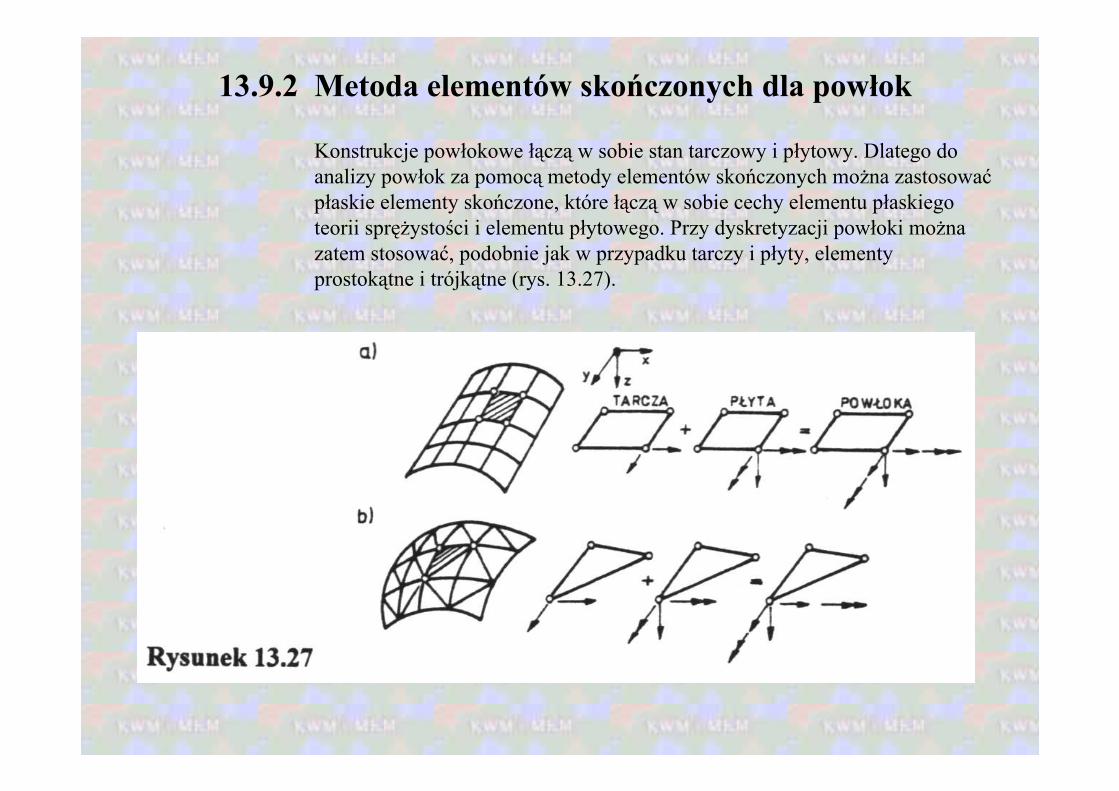
Konstrukcje powłokowe łączą w sobie stan tarczowy i płytowy. Dlatego do analizy powłok za pomocą metody elementów skończonych można zastosowaćpłaskie elementy skończone, które łączą w sobie cechy elementu płaskiego teorii sprężystości i elementu płytowego. Przy dyskretyzacji powłoki można zatem stosować, podobnie jak w przypadku tarczy i płyty, elementy prostokątne i trójkątne (rys. 13.27).
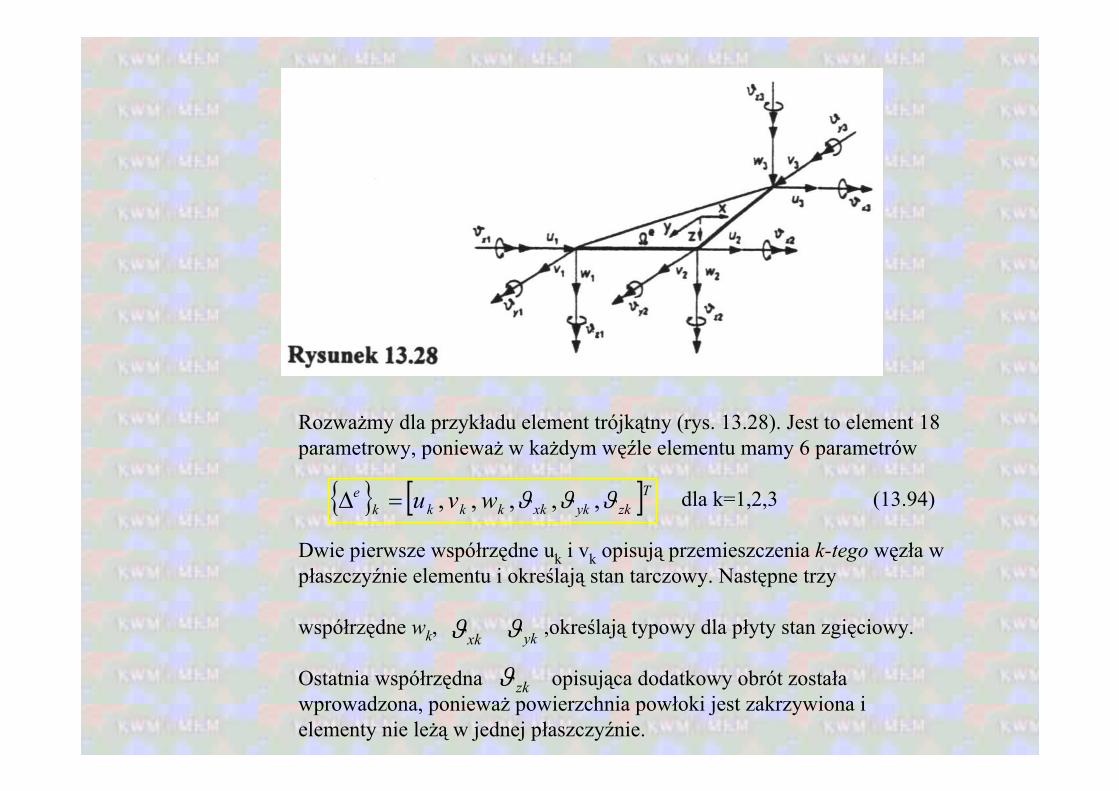
Rozważmy dla przykładu element trójkątny (rys. 13.28). Jest to element 18 parametrowy, ponieważ w każdym węźle elementu mamy 6 parametrów
dla k=1,2,3 (13.94)
Dwie pierwsze współrzędne uk i vk opisują przemieszczenia k-tego węzła w płaszczyźnie elementu i określają stan tarczowy. Następne trzy
współrzędne wk, ,określają typowy dla płyty stan zgięciowy.
Ostatnia współrzędna opisująca dodatkowy obrót została wprowadzona, ponieważ powierzchnia powłoki jest zakrzywiona i elementy nie leżą w jednej płaszczyźnie.
{ } [ ]Tzkykxkkkkke wvu ϑϑϑ ,,,,,=Δ
xkϑ ykϑ
zkϑ
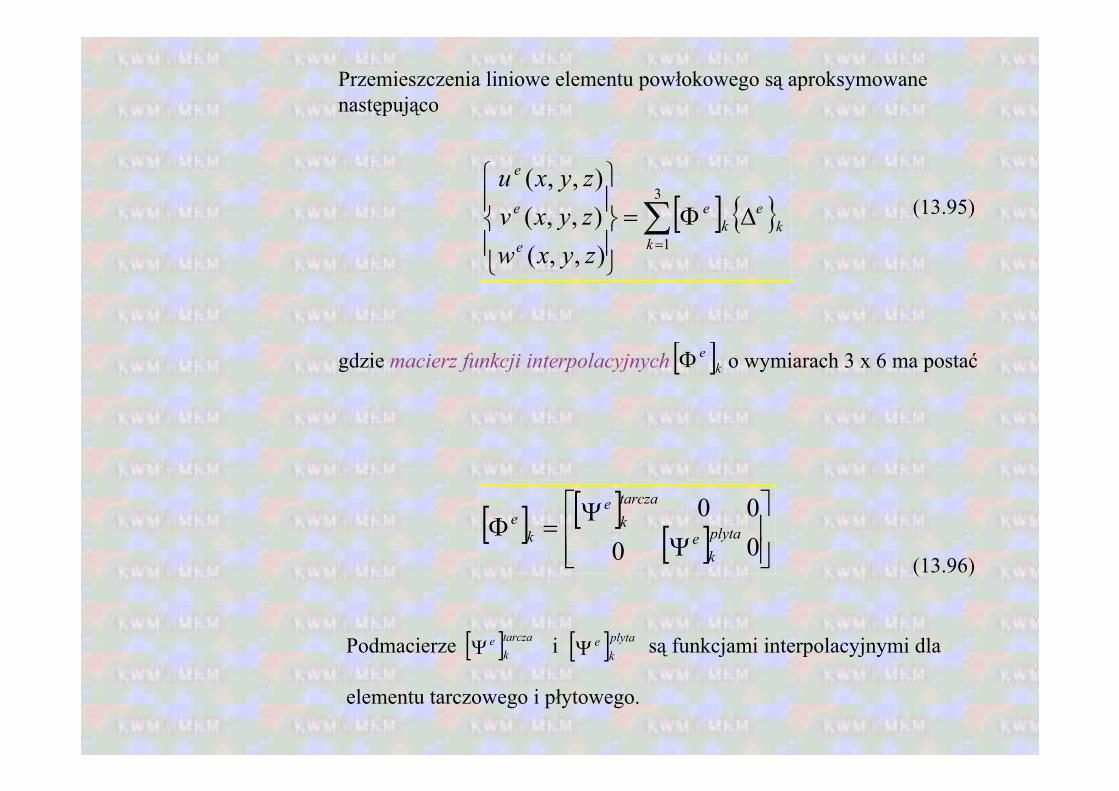
Przemieszczenia liniowe elementu powłokowego są aproksymowane następująco
(13.95)
gdzie macierz funkcji interpolacyjnych o wymiarach 3 x 6 ma postać
(13.96)
[ ] { }∑=
ΔΦ=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧3
1),,(),,(),,(
kk
ek
e
e
e
e
zyxwzyxvzyxu
[ ]keΦ
[ ] [ ][ ] ⎥
⎥⎦
⎤
⎢⎢⎣
⎡
ΨΨ=Φ
000
0plytak
e
tarczak
e
ke
Podmacierze i są funkcjami interpolacyjnymi dla
elementu tarczowego i płytowego.
[ ]tarczak
eΨ [ ]plytak
eΨ
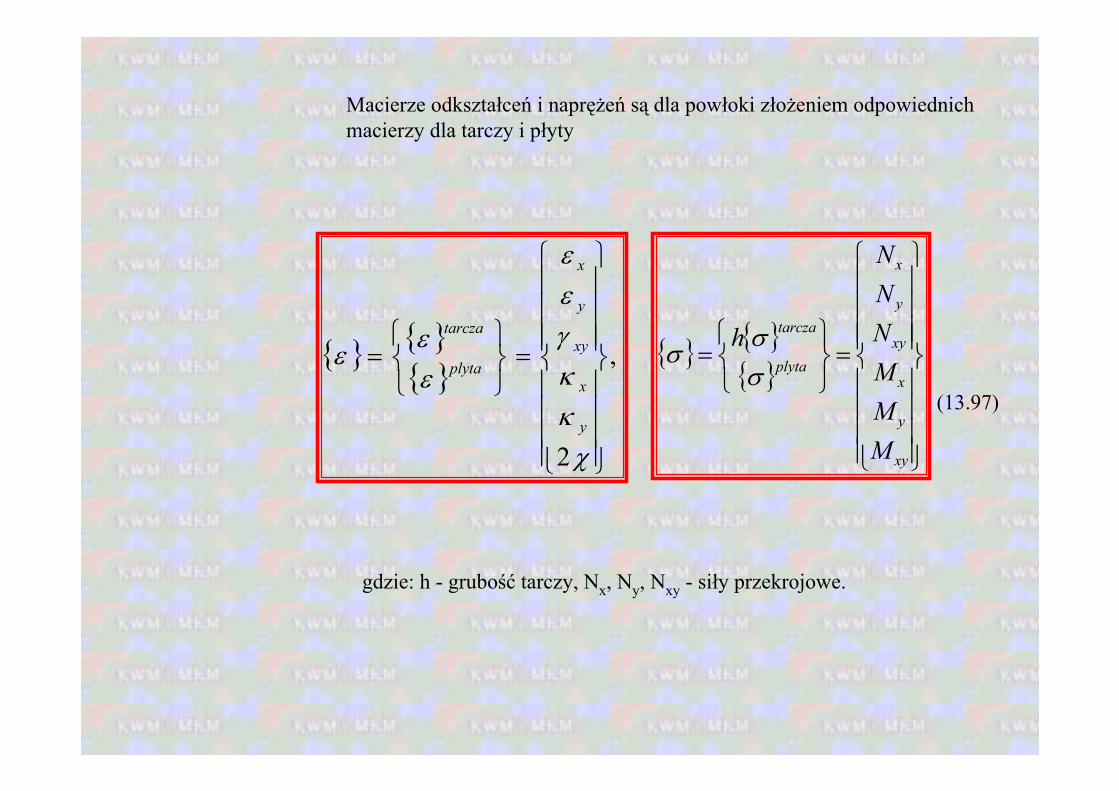
Macierze odkształceń i naprężeń są dla powłoki złożeniem odpowiednich macierzy dla tarczy i płyty
(13.97)
gdzie: h - grubość tarczy, Nx, Ny, Nxy - siły przekrojowe.
{ } { }{ }
,
2 ⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=⎭⎬⎫
⎩⎨⎧
=
χκκγεε
εεε
y
x
xy
y
x
plyta
tarcza
{ } { }{ }
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=⎭⎬⎫
⎩⎨⎧
=
xy
y
x
xy
y
x
plyta
tarcza
MMMNNN
hσσσ
Macierz sztywności elementu powłokowego
Macierz sztywności elementu powłokowego ma następującą strukturę
(13.98)
Element macierzy sztywności na kierunku ϑzk został oznaczony jako . Faktycznie powinien on być równy zeru. Z punktu widzenia numerycznego, aby uniknąć osobliwości układu równań, ten element macierzy sztywności jest różny od zera, ale właściwie dobrany w nie-znaczny sposób wpływa na wyniki obliczeń. Przyjmuje się go zwykle w postaci
gdzie: λ < 0,03, he - grubość. Ae - pole powłokowego elementu skończonego.
[ ] [ ] [ ][ ][ ]
[ ]∫Ω
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
==e zast
kl
plytakl
e
tarczakl
e
lTkkl
e
KK
KdxdyBDBK
000000
zastklK
⎩⎨⎧
≠−=
=lkAEhlkAEh
Kee
eezastkl dla 5,0
dla ,λ
λ