Embed Size (px)
Citation preview

Fusion: General Concepts andCharacteristics(Edited by I. Bloch,4�* and A. Hunter,8���A. Appriou,1† A. Ayoun,2‡ S. Benferhat,3§ P. Besnard,3�L. Cholvy,5¶ R. Cooke,6# F. Cuppens,5�** D. Dubois,3†† H. Fargier,3‡‡M. Grabisch,7§§ R. Kruse,9¶¶ J. Lang,3## S. Moral,10�***H. Prade,3††† A. Saffiotti,11‡‡‡ P. Smets,12§§§ C. Sossai13���1ONERA, BP 72, 92322 Chatillon Cedex, France2Thomson-CSF-ISR/ACC, France3IRIT-UPS, 118 route de Narbonne, 31062 Toulouse, France4ENST-TSI-URA 820, 46 rue Barrault, 75013 Paris, France5ONERA Centre de Toulouse, 2 av Ed Belin, 31055 Toulouse, France6Faculty of Information Technology and Systems, Delft University ofTechnology, 2600 GA Delft, The Netherlands7LIP6-UPMC, 8 rue du Capitaine Scott, 75015 Paris, France8Department of Computer Science, University College London,Gower Street, London WC1E 6BT, UK9Faculty of Computer Science, University Magdeburg,D-39106 Magdeburg, Germany10University of Granada, Spain11Department of Technology and Science, University of Orebro,S-70182 Orebro, Sweden12IRIDIA, Université Libre de Bruxelles, CP 194/6, 50 av. Roosevelt,1050 Bruxelles, Belgium13Ladseb-CNR, Corso Stati Uniti 4, I-35127 Padova PD, Italy
*Author to whom all correspondence should be addressed; e-mail: [email protected].
†e-mail: [email protected].‡e-mail: [email protected].§e-mail: [email protected].�e-mail: [email protected].¶e-mail: [email protected].#e-mail: [email protected].**e-mail: [email protected].††e-mail: [email protected].‡‡e-mail: [email protected].§§e-mail: [email protected].��e-mail: [email protected].¶¶e-mail: [email protected].##[email protected].***e-mail: [email protected].†††e-mail: [email protected].‡‡‡ e-mail: [email protected].§§§e-mail: [email protected].; ���e-mail: [email protected].
INTERNATIONAL JOURNAL OF INTELLIGENT SYSTEMS, VOL. 16, 1107–1134 (2001)© 2001 John Wiley & Sons, Inc.

1108 BLOCH AND HUNTER, ET AL.
The problem of combining pieces of information issued from several sources can beencountered in various fields of application. This paper aims at presenting the differentaspects of information fusion in different domains, such as databases, regulations, pref-erences, sensor fusion, etc., at a quite general level. We first present different types ofinformation encountered in fusion problems, and different aims of the fusion process.Then we focus on representation issues which are relevant when discussing fusion prob-lems. An important issue is then addressed, the handling of conflicting information. Webriefly review different domains where fusion is involved, and describe how the fusionproblems are stated in each domain. Since the term fusion can have different, more orless broad, meanings, we specify later some terminology with respect to related problems,that might be included in a broad meaning of fusion. Finally we briefly discuss the difficultaspects of validation and evaluation. © 2001 John Wiley & Sons, Inc.
1. INTRODUCTION
The problem of combining pieces of information issued from several sourcescan be encountered in various fields of application, particularly in: (i) sensorfusion, i.e., when pieces of information coming from different sensors are to beaggregated; (ii) multiple source information systems where several sources canprovide precise, imprecise, or uncertain information about data of interest; and(iii) expert opinion pooling where different individual statements about numeri-cal parameters have to be synthesized.
In all these situations, we may be faced with conflicting, partially inconsis-tent information provided by heterogeneous sources having different levels ofreliability. In such situations when information is poor, scarce and lacks preci-sion, standard approaches to data fusion based on probabilistic models are notalways enough to deal with the problem in an appropriate way. Depending on thenature of the available information, various models can be used for its represen-tation. These models range from fully quantitative frameworks, like probabilitytheory, belief function-based evidence theory, and upper and lower probabili-ties, to more qualitative ones, like possibility theory and non-monotonic or para-consistent logics. In all these models, techniques for combining information havebeen suggested.
This paper aims at presenting the different aspects of information fusionin different domains, such as databases, regulations, preferences, sensor fusion,etc. More specific problems will be detailed in the next papers in this issue,and solutions will be proposed and discussed for each of these problems. Theseproblems are illustrative examples, or even case studies for a few of them.Here we remain at a quite general level. We first present different types ofinformation encountered in fusion problems, and different aims of the fusionprocess in Section 2. In Section 3, we focus on representation issues whichare relevant when discussing fusion problems. Section 4 concentrates on animportant issue, the handling of conflicting information. In Section 5, we brieflyreview different domains where fusion is involved, and describe how the fusionproblems are stated in each domain. Since the term fusion can have differ-ent, more or less broad, meanings, we specify later some terminology withrespect to related problems, that might be included in a broad meaning of

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1109
fusion. In Section 6, we briefly discuss the difficult aspects of validation andevaluation.
This paper results from numerous discussions carried out during the scien-tific meetings of the working group FUSION, led by Philippe Smets, and sup-ported by a grant from the European Union.
2. FUSION: TYPES OF INFORMATION AND AIMS
2.1. General Definition
Given the range of application problems and solutions proposed, it isnot surprising that there are some quite diverse definitions for the notion offusion in computing. In this situation, it may be helpful to take a definition offusion given in an English dictionary (Collins Concise English Dictionary 2ndEdition):
Fusion (1) The act or process of fusing or melding together. (2) The state of beingfused. (3) Something produced by fusing.
In this general definition, we can see that fusion can incorporate a process,a state, and a result. In the computing literature, fusion is normally defined interms of one or more of these three features.
Resulting from discussions in the working group, the proposed informal def-inition is as follows: fusion consists in conjoining or merging information that stemsfrom several sources and exploiting that conjoined or merged information in vari-ous tasks such as answering questions, making decisions, numerical estimation, etc.This definition contains two main ingredients. First, it focuses on combinationof information. Second, it emphasizes the aims of fusion. This definition is gen-eral and applies to different domains, with possible different instantiations andspecifications for each particular domain or problem.
At this stage, it is worthwhile to consider the relationship of estimation withfusion. Estimation can be defined as follows: from several values of a fluctuatingparameter, extract a plausible value that gets rid of noise. Usually averagingoperations are chosen, which corresponds to the minimization of the averagedistance to observed values (i.e., try to get a consensus).
On the one hand, estimation can be seen as a fusion step followed by aselection step (defuzzification for instance). On the other hand, a fusion systemrelying on numerical representations and combination operators often needs anestimation step of the distributions to be combined.
The fact that fusion has to be carried out in a static or dynamic environ-ment is an important characteristic, that has to be taken into account since itleads to different fusion problems and methods. Let us take a few examples. Ina recognition or identification problem, the problem is by nature static, but someuseful characteristics of information may be dynamic, or need temporal integra-tion in order to get sufficient accuracy. In classification problems, both types canbe encountered. In tracking problems, both the information and the problem aredynamic. Multi-criteria fusion problems are usually static, as well as group deci-sion or data base fusion problems. If the information arrives dynamically, we may
1110 BLOCH AND HUNTER, ET AL.
either wait until all information is available to perform the combination, but wemay also exploit the sequentiality of the information to make partial combinationwith the available information at a given time.
2.2. Types and Origin of Information
Fusion problems in different domains actually deal with different types ofinformation. We distinguish between two types of information. Descriptive infor-mation pertains to the real world, while normative information pertains to anideal world. Descriptive information includes observations and knowledge. Nor-mative information includes preferences and regulations.
2.2.1. Observations
The types of information grouped under the term observations cover infor-mation like data issued from sensors, evidences, facts, measurements. Gener-ally speaking, they are description elements of how the world is (now, at theinstant where observations are collected), and refer to a particular situation, nota generic one. This type of information can be objective as well as subjective.The first case concerns data supplied by some sensor or device, while the secondone concerns opinions provided by some person.
Depending on the type of observations, the items to be fused can havevarious forms: numbers, intervals, subjective uncertainty distributions, certainty-qualified propositions, and linguistic values.
2.2.2. Knowledge
Knowledge describes how the world is in general. It does not necessarilyrefers to a particular situation as one observation, but rather to something moregeneric, like some population, some class of situations. Knowledge can be welldefined (for instance as statistical data) or not (default knowledge). Items to befused are then rules (possibly with exceptions), fuzzy rules, statistical probabilitydistributions, likelihood functions, plausibility orderings, mathematical models,laws of nature, etc.
2.2.3. Preferences
In opposition to the previous type of information, preferences are alwayssubjective descriptions of desires of an individual or a group of persons. Theyrefer to how they would like the world to be. The items to be fused are then utilityfunctions, or binary or fuzzy preference relations. The goal of fusion is to makechoices. As with other kinds of information, information about preferences maybe incomplete, imprecise or uncertain. Examples of fusing preferences can befound in the paper assignment problem,6 and in the candidate selection problemas well.16
2.2.4. Regulations
Regulations refer to how the world should be in general. The ideal worldin this sense is the one where regulations are satisfied. These regulations can

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1111
describe what is compulsory as well as what is forbidden in a certain domainof interest. It is again a generic type of information, which refers to a class ofsituations encountered in this domain.
2.3. Aims of Fusion
A careful examination of the motivations and reasons for combining infor-mation should be useful and shed light on the peculiarities of different types offusion problems. We find four main reasons for combining:
• To refine or expand our knowledge, information or beliefs about the real world.• To build a global point of view about an ideal world.• To update or refresh information about the real world.• To update or refresh information about the ideal world.
These reasons correspond, respectively, to forming a model of the real world orof the ideal world, and updating a model of the real world or of the ideal world.
2.3.1. Forming a Model of the Real World
A first reason for combining is to refine information about the real world.We suppose we have several sources of information, describing the present stateof the real world, usually in terms of attribute values. Typical examples of sucha situation are given by target tracking problems, or by “situation assessment”problems. Other typical applications can be found in multi-sensor classificationor recognition. In such applications, the purpose is to label some objects, usingsensor information. The fusion has to take advantage of the complementarityof the sensors involved, concerning their discrimination ability. Each sensor mayhighlight different features of the objects, and one sensor is generally not suf-ficient when we want a precise and reliable classification between quite similarobjects (this is why fusion is necessary). Generally speaking, the combination ofthe pieces of information provided by the different sources, taking into accounttheir respective level of reliability, will afford a refinement of knowledge aboutthe real world: imprecision and uncertainty are reduced, when a conjunctive com-bination is performed, incomplete information of one source may be completedby other sources. We give further details.
What is called the real world is usually a particular object or collection ofobjects of interest. This object could be physical (e.g., target, submarine, etc.) orabstract (situation of the battlefield, of an airport, economic situation, etc.). It isdescribed by a set of attributes, which can be of any nature, and as complex asnecessary: numerical (scalar or vector) attributes (e.g., frequency, position, veloc-ity, interest rates, etc.), ordinal, or lattice-valued attributes, enumerated attributes(e.g., class of target), complex structures such as trees, graphs, etc. (e.g., scenar-ios). Objects can be dynamic, i.e., include time in their representation, and inthis case may be called events.
A source of information is any physical device, or a human operator, pro-viding data of any kind pertaining to the attributes describing the real world. Thedata provided by the sources instantiate values of the attributes. These values

1112 BLOCH AND HUNTER, ET AL.
may be pervaded with imprecision (e.g., “around 5.4”, “somewhat large”, “red”),with uncertainty (e.g., “it seems to be a civil plane”), or may be incomplete, i.e.,some attributes are not instantiated (e.g., “velocity unknown”). Also, the sourcesthemselves may be more or less reliable.
A problem which is often overlooked is the following. The above presenta-tion supposes implicitly that all information provided by the sources are pertain-ing to the same (real) world (or same object), so that it is natural to combinethem, taking into account their reliability and the quality of the information, inorder to get a more comprehensive view of the real world. However, in prac-tical applications as target tracking and situation assessment, this is far frombeing true. The first step, prior to any action of combination, is to verify that theinformation delivered by the sources pertains to the same object. This prelimi-nary (but most difficult, according to Bar-Shalom and Fortmann4) stage, calledassociation (or data association in multi-target tracking) amounts to finding themost plausible partition of the set of sources, thus splitting the information intodistinct objects. Most of the time, the problem is made harder by the fact thatthe a priori number of observed objects is unknown. In multitarget-tracking, theuncertainty about association comes from random false alarms in the detection,clutter, interfering targets, decoys or other counter-measures. The main modelsused in this field are either deterministic (involving classical hypothesis testing)or probabilistic (relying mainly on the Bayesian framework).4�31�38 The most com-mon method4 relies on Kalman filter under Gaussian hypothesis.
2.3.2. Forming a Model of an Ideal World
A second reason for combining is to have a global point of view, takinginto account different points of view, such as individual preferences, or consensualregulations, or otherwise said, on how the world should be. This problem differsconsiderably from the preceding one. In knowledge refinement, the aim is toget the more comprehensive, synthetic description of the real world, eliminat-ing redundancies and inconsistencies, and enhancing precision. Here, the aim isnot necessarily to obtain a refined description of the ideal world but rather toevaluate alternatives. However, here we are interested in the combination step,leading to the synthetic description, not in the final selection step.
In the case of preferences, sources may be human experts, voters, andthen we speak of multi-person decision, social choice, opinion pooling, votingproblem, etc., or criteria, and then we speak of multicriteria analysis or decision.An example of the last category is the following: consider a data base about cars.Considering several criteria to evaluate the cars (such as “price”, “performance”,“gas”, “comfort”), each criterion gives its point of view to evaluate the cars (thepoint of view of the price, etc.), and we have to combine them in order to havea global point of view, which allows us to make a decision.
Another typical example is group decision making. Fusion appears then atthree possible stages: fusion of information and even models of the problem(point of view of different agents), fusion of objectives if there is not a commonobjective, this step being related with making coalitions trying to define common

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1113
strategies, and fusion of decisions, the different decisions that each individualagent would like to make having to be merged into only one.
In the case of regulations, i.e., a set of “laws” specifying what is permitted,obligatory or forbidden to do in this world, as for example “You ought not tokill”, “You ought not to eat with your fingers”, and so forth, sources can beviewed as different cultural, political, or religious systems, each having its ownconsistent regulation.
Having several different points of view coming from several sources, theproblem is to combine them in order to get a global, coherent point of view. Itscarcely happens that all sources have more or less the same opinion about theworld, so that contrarily to Sections 2.3.1 and 2.3.3, here conflict is the rule morethan the exception. For this reason, methods of combining are completely differ-ent from the above, and are of the consensus or average type. Usually, if the con-flict between several points of view is not too strong, a kind of midpoint betweenthem is taken, while considering the importance (level of expertise, relevance,etc.) of each source, as well as possible interactions between them. If the conflictis too strong, the two sources causing the conflict should not be combined. Theproblem happens to be considerably difficult in the case of regulations. Whatshould a Christian soldier do if one (religious) regulation says “Christians oughtnot to kill”, and another (military) regulation says: “Soldiers ought to kill”? Thehandling of conflicting information is addressed in more detail in Section 4.
Lastly, we want to stress the difference of combination procedures betweenthe present case and the knowledge refinement/updating case. Let us take as anexample two sources giving their point of view about the preference of a over b.One source may say that it strongly prefers a over b, while the second one maysay that a and b are indifferent. A reasonable combination of the two leads tothe conclusion that globally, a is more or less preferred to b, i.e., we have made akind of average of the two opinions. Let us consider now the case of knowledgerefinement. Suppose two reliable sources estimate the position of a target. Onesource says that the object is near A, and the other says that the object is nearB, and A�B are imprecise locations which are disjoint. Applying an average typecombination to this case would lead to the conclusion that the true position ofthe object is in between, which is clearly false, since both sources, which arereliable, agree on the fact that the object is certainly not outside A and B! Theseexamples show that different situations have to be treated in completely differentways, and different combinations have to be used.
2.3.3. Updating a Model of the Real World
A third reason for combining is to update, revise or refresh information aboutthe real world. We assume that we have a current model of the real world. Thecurrent model is thus a set of instantiated attributes, describing the real worldat a given time. This model may have been obtained by a prior combinationof sources pertaining to the considered real world (see Section 2.3.1). If a newinformation about the world is coming, we may want to combine it with theexisting information, taking into account its level of reliability. Here, the natureof combination is essentially non-symmetric, since we cannot assign the same

1114 BLOCH AND HUNTER, ET AL.
role to a source bringing new information and to a knowledge base or a prioriinformation, refined over time, and with a potentially long history. At this stage,a distinction between revision and updating should be done:15�29�44
• Revision modifies prior information about the world at time t (situation repos-itory) by new information about time t with priority to the latter (the world isenvisaged from a static point of view, but the asymmetry is about the informationflow). Modification of prior information is minimal. Revision is mostly based onconditioning.
• Updating modifies prior information about the world at time t by new informationabout time t + 1 with priority to the latter, so as to describe the world at timet + 1. Updating is achieved by:• minimal evolution of each a priori possible state of the world to a state com-patible with the input information (e.g., databases),
• or by a prediction step (using a model of the evolution of the world) followedby a revision step (e.g., Kalman filtering).
The priority problem depends on the following situation:
• Sometimes new information incompatible with prior information should be dis-carded, due to integrity constraints in databases, or if the real world is supposedto have a certain stability in time, which means that there should be no significantchange in the knowledge base, nor strong conflict.
• Sometimes new information incompatible with prior information should have pri-ority, if the prior information is expressed for instance as rules that may haveexceptions, or if the real world is evolving with time (case of target tracking, sit-uation assessment problem, financial and economical situation, or any dynamicalsituations). A prediction model may be used here, allowing the comparison (andpossibly combination) of the predicted value of attributes with the observed ones.The prediction model is useful in order to discard new information which is toofar from expected values.
Here again, a preliminary step of (data) association has to be performed, in orderto be sure that the information to be combined with current knowledge pertainsto the same real world.
Typical applications of updating can be found in tracking, and in assessmentof time varying situations.
2.3.4. Updating a Model of the Ideal World
The previous distinctions (between symmetric and asymmetric operators,between revision and update) are relevant as well when dealing with preferenceor obligations. Although the difference between preference revision and pref-erence update has not received much attention so far (and some ambiguitiesabout the statics or dynamics of the ideal world render their intuitive understand-ing somewhat risky), much more classical (and related to the revision/updatedichotomy) is the difference between incorporating in a “preference base” (i) anew goal or regulation, or (ii) a new fact (this distinction is made clearly withinthe framework of deontic logics, for instance).

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1115
3. INFORMATION REPRESENTATION ISSUES IN FUSION
3.1. Explicit and Succinct Representations
Before planning to develop an information system with fusion capabilities,attention should be paid to the data structure used for encoding as efficiently andas practically as possible the available information.
When the set of states (whether this refers to the actual world or to an idealworld) has a reasonable size, knowledge or preference items can be representedexplicitly, by listing all possible situations, possibly ranked-ordered, or else withan attached numerical degree representing, for instance, probability, possibility,belief, utility, cost, etc.
This representation is not any longer reasonable when the set of possiblestates is prohibitive. This happens in particular when the (actual or ideal) worldcan be described by a number n of variables, each of which having a domain ofpossible values; here, the set of states is equal to the set of feasible assignmentsand thus grows exponentially with n. Therefore, it is obviously unreasonable torequire from the agents an explicit specification (in the form of a table or a list)of their pieces of knowledge or their preferences. This argues for the need ofa compact (or succinct) representation language for preferences. The knowledgerepresentation community has developed such languages, that we may (roughlyspeaking) cluster into two classes.
Logical languages. Such languages are based on propositional or first-orderlogic, or extensions of them (consisting, for instance, in specifying numericalconstraints on the uncertainty or preference degree of logical formulas, or indistinguishing explicitly between facts and obligations). Logical representationlanguages are not only succinct but enjoy two other nice features: (i) they have agreat expressivity and enable encoding data as close as possible to the intuition(and, thus, the encoding from a specification in natural language should be feasi-ble); (ii) they are equipped with decision procedures so as to enable the automa-tion of the fusion process. In a logical framework, there are two different waysto represent information, which correspond to the so-called model theory andproof theory of logic. According to the model theory, information is representedby a set of worlds (or states). The kind of worlds depends on the underlyinglogic. For instance, they can be classical truth assignments, if the underlying logicis a classical logic; or worlds related by an accessibility relation, if the underlyinglogic is modal; or worlds ordered by an order relation, if the underlying logic ispreferential. Consequences of an information are defined by the sentences whichare true in all its models, i.e, in all the worlds where it is true. According to theproof theory, an information is represented by a sentence (or a set of sentences)of the language associated with the logic. Consequences of a sentence are heredefined by the sentences which can be derived from it, by using the inferencerules and the axioms defined by the proof theory. These two representations areequivalent if a soundness and completeness theorem establishes that any validformula (a formula which is true in any world) is a theorem of the logic andvice versa. Now, when addressing the problem of merging information, we must

1116 BLOCH AND HUNTER, ET AL.
first decide which kind of representation we adopt to represent the informationto be merged. According to the representation adopted, the way of characteriz-ing the merged information will be different. For instance, in Ref. 5 the authorsadopt a proof theory (or syntactical) point of view and define the merged infor-mation by some maximal consistent subsets of sentences. The unified frameworkby Liberatore and Schaerf is able to handle simultaneously belief revision, beliefupdate and belief merging.32 In Ref. 30, the authors adopt a model theory (orsemantical) point of view and the merged information is, by definition, the onewhose models are characterized by their merging methods.
Graphical models. This terminology refers to languages expressing explicitdependencies between variables. For instance, Bayesian networks37 (expressing,for each variable, its conditional probability table given the value of the vari-ables it depends upon) can be used for representing succinctly a joint probabilitydistribution. (Similar models exist as well for representing a utility function oran ordinal preference relation.) Another example is the language of constraintsatisfaction problems where a set of constraints, each of which restricts the val-ues that a given set of variables may simultaneously take, enables the succinctrepresentation of an exponentially large set of possible worlds.
3.2. Numerical and Symbolic Representations
Information may be numerical or symbolic. By numerical information, wemean data directly given as numbers. These numbers may represent various quan-titative attributes, typically physical measures, grey levels, feature evaluations inimage processing, etc. They may be directly read from the images to be fused,or attached to the domain or contextual knowledge (e.g., wavelengths in satelliteimaging, acquisition times in medical imaging, etc.).8 By symbolic information,we mean all information given in terms of structures, or chains of characters likegraphs, linguistic terms, logical propositions, rules, etc. This type of informationcan be related to the data to be combined or related to the domain knowledge,such as propositions about the properties of the problem at hand, etc.
Generally speaking, numerical data may have to be interfaced with symboliclabels for categorization and communication purposes. Fuzzy set methods playan important role in this problem (see, e.g., Ref. 18). Moreover, in several situa-tions, a strong complementarity can be observed between the roles of numericaland symbolic information. Let us take the example of a map and an aerial imageof the same area. The numerical information carried by the image provides aquite accurate description of the scene, but the interpretation attached to it ishard to derive. For instance, it is generally difficult to assess the type of a build-ing, although its drawing on the image is accurate. On the contrary, the mapcarries symbolic information labeling the objects represented on the map but itsshape is often sketchy. This complementarity has been exploited for instance inheterogeneous image fusion.7�33
An important use of numerical representations in data fusion is for quanti-fying imprecision, uncertainty or reliability of the information (this information

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1117
may be of numerical as well as of symbolic nature), therefore representing insteadinformation about the information than the data themselves.
Symbolic types of treatment include formal computation on propositions(logic is but one example), possibly taking into account numerical knowledge.Structural approaches, like graph-based approaches often used in structural pat-tern recognition, can be considered as belonging to this class. Manipulation ofsymbols can be done either at the syntactical level or at the semantical level.
The rest of this section concentrates on important issues when representinginformation in a fusion system: the defective aspects of information, the genericor factual nature of the information, and the role of representation scales.
3.3. Defective Aspects of Information
Information may be imperfect in various respects, and pieces of informationto fuse are usually imperfect in some sense, since if one source provides piecesof information which would be non-ambiguous, complete, precise, certain, fullyreliable, there will be no fusion problem (since then we should just use theinformation provided by this source and forget the rest of the information). Thereason for fusing information is usually the hope of getting more precise, or morereliable information as a result. Let us briefly recall the different defective aspectsof information: ambiguity, uncertainty, imprecision, incompleteness, vagueness,inconsistency.
Ambiguous information has no clear meaning, and can be formally inter-preted in several distinct ways. A particular case of ambiguity is when it is unclearto what item the information at hand refers to. As pointed out in Section 2.3.1,the pieces of information may refer to different items, or we may be just unsureif there are one or several items, as in the following scenario. Assume that a clin-ician receives two reports about a new patient, named Paul. One states “patientcoughs and vomits” and the other “patient coughs and has fever”. Normally thereis only one document accompanying a patient. Here there are two. The cliniciancan assume that at least one of them applies to Paul, maybe both. If there is someevidence that one of the reports is the regular one, then the other ambiguousinformation with respect to Paul may be turned, in such a case, into a piece ofinformation also applying to Paul, but considered as not fully certain (if there isno way to check the origin of the report).
Uncertainty refers to lack of sufficient information about the state of theworld, for determining whether a Boolean statement (which can only be trueor false) is indeed true or false. Examples of such statements are: “It will rainat 5 p.m. today”, “Tweety flies” (knowing only that Tweety is a bird and thatbirds usually fly), “The number of inhabitants in Palma de Mallorca is over500,000” (but the person who gave me this information is not fully reliable). Insuch situations, the best that we can do is to try and estimate the tendency ofthe statement to be true (or false). Several frameworks are possible: (1) numer-ical methods such as probability theory, quantitative possibility theory, belieffunctions, (2) purely symbolic deduction methods using defeasible reasoning,mechanisms for producing plausible conclusions in spite of partial lack of infor-mation. Uncertainty may be assigned to each piece of information individually,

1118 BLOCH AND HUNTER, ET AL.
or more globally to a source of information whose level of reliability can beestimated.
Imprecision refers to the contents of the considered statement and dependson the “granularity” of the language used in the statement. For instance, thesentence “Paul is between 25 and 30 years old” is clearly imprecise. The sen-tence “Paul is 26 years old” is precise if we only expect an age value specifiedin years, but is imprecise if a more accurate age value indicating the numberof months or days is expected. Imprecise statements may stem from disjunctiveinformation such as “Peter is 25 or 27”, or negative information such as “Peteris not between 25 and 30 years old”. An extreme situation is when Peter’s ageis entirely unknown, which means that any value of the universe may equally beassigned. Such a case of missing information is also often referred to as a situa-tion of incomplete information. Imprecision is represented in terms of subsets ofthe relevant attribute domain, which are not singletons. These subsets constrainthe possible values which can be assigned to the attribute for the consideredobject.
A given statement may be both uncertain and imprecise; for instance, whenthe information “Paul is between 25 and 30 years old” is provided by a sourcethat is not fully reliable. Generally, a balance exists between uncertainty andimprecision: the more imprecise the statement, the more certain we are about it,and conversely, the more precise the statement, the more uncertain we are (withrespect to a given state of available information).
Imprecision may also be due to multiple data sources that use differentvocabularies for expressing attribute values, corresponding to different partitionsof the same universe of discourse. In that case, there is not a one-to-one corre-spondence between the labels of the elements of the different partitions.
Incompleteness refers to sources with missing information, or that are notable to distinguish between several situations. For instance if a source givessome measurements about the real world, the information it provides is gen-erally partial, and gives only one point of view or one aspect of the observedphenomenon. This is an important motivation for fusion of different and com-plementary sources.
A vague statement contains vague or gradual predicates. It may also includevague quantifiers. For instance, “Paul is a young researcher” refers to Paul’s ageusing the linguistic term “young”. Note that the meaning of a vague predicatedepends on the context. When the only available information about Paul’s ageis that “Paul is young”, the statement represents a flexible constraint on theacceptable values for Paul’s age. Then, an ordering among the values compatiblewith the concept of “young” is defined.
A statement, or a set of statements, is inconsistent if there is no possibleinstantiation of the variables under consideration (or no model) that renders(all) the statement(s) simultaneously true. The two pieces of information “Paulis 25” and “Paul is older than 27” illustrate this situation since there is no wayof assigning a value to Paul’s age which agrees with both items. Inconsistencymay be due to distinct sources of conflicting information with different levels ofreliability. Acknowledging this fact is the first step towards a solution.

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1119
Let us take a few examples. In fusion problems aiming at recognition andidentification, imperfections come from measurements that may be spoilt, noisy,erroneous, features that are more or less observable or discriminant according tothe identity that is considered and the conditions of observations, learning andprior knowledge that can be neither exhaustive (information difficult to collect),nor perfectly representative of the objects that are really met (because of evo-lution of characteristics and conditions). When fusing expert opinions, expertsmay have valuable knowledge about models and parameters for problems in theirfield. This knowledge is not certain, but is entertained with an implicit level ofsubjective confidence, or degree of belief. The quantification and aggregation ofexperts’ degrees of belief may provide important input to a decision maker, andmay result in “optimally defensible” choices of parameters of models.
The counterpart of these imperfections is provided by the redundancy andthe complementarity of the sources of information, that is exploited in fusionmethods. Roughly speaking, redundancy can be used to reduce uncertainty andimprecision, and to increase reliability, while complementarity can be exploitedto solve ambiguities and get a more complete information. Conflict is addressedin more details in Section 4.
3.4. Generic and Factual Information
According to the above classification, factual information is concerned withobservations or maybe preferences, while generic information covers knowledgeor regulations. This coarse distinction has to be refined for each type of problem.
The difference between factual data and generic knowledge is of primaryimportance when making inferences or fusing information. Factual data refer toinformation pertaining to particular cases, while generic information is consti-tuted by universal rules, even if they are uncertain or have exceptions.
The situation of fusing pieces of factual data provided by different sourcesis encountered in sensor fusion, in expert opinion pooling, or in databases. Theproblem is then to sort what is true from what might not be so, from outliers.
The problem of merging knowledge bases corresponds to the joint use ofrules provided by different sources. This creates problems only in case of conflict-ing rules. Then strategies for restoring consistency, or for introducing prioritiesbetween rules have to be designed. An example of such a situation is the mergingof regulations which may be conflicting. The problem is more generally encoun-tered when merging deductive data bases.
Plausible reasoning by means of default rules in presence of incompleteinformation about a factual situation amounts to completing the data by derivedplausible conclusions. We may also try to interpret the data by inducing expla-nations, as in causal reasoning. These are not fusion problems, strictly speaking.If the data are used for improving rule-based knowledge, it is a problem whichcombines learning and fusion aspects.
If sources are more or less generic the fusion process may become invalid.This goes with the notion of knowledge specific to a class, a key issue in non-monotonic reasoning.22

1120 BLOCH AND HUNTER, ET AL.
3.5. Nature and Role of Measurement Scales
As suggested before when describing the different types of informationencountered in fusion problems, their representations may involve different mea-surement scales for estimating uncertainty, preference, priority and the like.These scales may be substantially different for two main reasons. First their math-ematical structure, and thus the operations permitted on the elements of thescale, may be different. Second, because the scales are used for different pur-poses, the meaning of the elements of the scales, especially the top and bottomelements of a bounded scale, depends on what the scale refers to, probabilities,possibilities or utilities for instance.
Let us first consider the nature of the scale. The scales which are usedin information representation are usually bounded, and linearly ordered, whichmeans that all the elements in the scale are comparable. However, this require-ment may sometimes be felt too strong, for instance when modeling preferences.The elements in the scale are generally referred to as “levels” or “degrees”.“Levels” is more in agreement with a scale whose elements are non-numericalsymbols, while the term “degrees” suggest a numerical flavor. Scales may befinite or not, discrete or not. Finite or discrete scales go along with qualitativemodeling, where only the ordinal nature of the scale is used. The elements of thescale can receive a linguistic interpretation, which is convenient for the interfacewith the user, but requires that the linguistic labeling agrees in common sensewith the linear ordering of the scale. Numerical scales are required for someuncertainty frameworks such as probabilities or belief functions.
The choice of the type of scale also has consequences on the combina-tion operations which are allowed. For instance some numerical operators canaccommodate only numbers, other ones (like min and max for instance) can alsodeal with ordinal values. The semantics of the scale depend on its role. In partic-ular, the scale can represent levels or degrees of satisfaction, or levels or degreesof uncertainty, etc. Then conventions for interpreting the scale differ. The boundsof the scale may play symmetric roles (like for probability or preference), orasymmetric roles (like for possibility, or feasibility).
Even in a given class of problems, different types of scales can be used.Thus, when considering a scale, e.g., [0, 1], it is very important to make clearwhat is the interpretation of the degrees, especially the bounds of the scale. Forinstance, in preference modeling we may use a “satisfaction” scale such as 1means completely satisfactory, 0 completely unsatisfactory, and 0.5 half satisfac-tory (indifference). We may also use a “possibility” scale, where 0 means that analternative to which a 0-evaluation is attached cannot be chosen, while 1 doesnot express that the associated alternative should be chosen (but only that it isone of the feasible alternatives). Thus, in this latter case 0 and 1 do not playsymmetric roles. This second type of scale seems to be appropriate for modelingsoft constraints expressing preference profiles, while the first type of scale mightbe more appropriate in social choice aggregation (for fusing graded “votes”: then0 and 1 play interchangeable roles, since we could reverse the scale as well, and

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1121
working with the opposite convention for 0 and 1 should not change the resultingchoices).
Similarly, when dealing with uncertainty, we can either use a symmetricalscale as in probabilistic modeling, or use a framework where we can distin-guish between two graded modalities, expressing “what is believed” (because itis logically entailed by the (uncertain) evidence) and “what is plausible”, respec-tively. For the belief scale the top element (1) means complete belief, while thebottom element (0) just means complete lack of evidence supporting the con-sidered statement; for the plausibility scale it is the bottom element (0) whichmeans impossibility, and thus carry a strong information, while the top elementexpresses just a mere possibility.
A last issue concerns commensurability between scales. Commensurabilityproblems may occur as soon as several pieces of information expressed on dif-ferent scales are merged. Although such problems can be avoided when scaleshave the same, clearly established semantics (e.g., probability, possibility) andare carefully built, attention is needed when scales refer to utility or satisfactiondegrees. In this case, we should be careful that “0.6” coming from source i meansthe same intensity in satisfaction or utility than “0.6” coming from source j .Otherwise, merging these quantities has no meaning.
4. CONFLICTING INFORMATION AND DEALING WITH CONFLICT
Many tasks that an intelligent agent performs such as decision-making, plan-ning, design, and specification, often involve collecting information from a num-ber of potentially conflicting perspectives or sources, or participants with differentviews, and forming a single combined view or perspective — a synthesis, orconsensus.
Logical fusion is the process of deriving this single consistent view. Whiletheoretical approaches such as belief revision,1�18�23 databases and knowledgebase updating,20�28�44�47 and combining knowledge bases (for example Refs. 5, 17,34) are relevant, information fusion addresses a wider range of issues raisedby practical imperatives in applications such as requirements engineering.27 Thedevelopment of most large and complex systems necessarily involves many peo-ple, each with their own perspectives on the system defined by their knowledge,responsibilities, and commitments. Inevitably, the different perspectives of thoseinvolved in the process intersect, giving rise to conflicts. From a logical perspec-tive, these conflicts can be viewed as logical contradictions or inconsistencies.
4.1. Do Conflicts Have to Always be Solved?
The case of conflict is not infrequent in data fusion problems. The problemof their resolution is not easy and depends upon the type of combination (refine-ment, updating, global, as discussed in Sections 2.3.1, 2.3.3, 2.3.2, respectively).Faced with a conflict between two sources, we may choose one of the followingsolutions:
• Take one of the two sources, and discard the other one (unilateral resolution).

1122 BLOCH AND HUNTER, ET AL.
• Make a compromise, i.e., merge to a certain extent the information conveyed bythe two sources (compromise resolution).
• Create a new world: in this case, it is considered that the two sources do notobserve the same object or world.
• delay the decision, waiting for more information (note that this may cause anincrease in complexity, if a lot of information and multiple hypotheses have to bestored and processed).
It should be noted that only the first two solutions can be indeed called “conflictresolution”. We are interested here in what cases should not solve the conflict.Considering the different types of data fusion problems, the following very gen-eral guidelines can be given:
• In the case of knowledge refinement (see Section 2.3.1), and for sufficiently reli-able sources, most conflict should not be solved and a new world has to be created.If not, either one of the two sources has to be discarded (case of very differentreliabilities), or a compromise has to be made, not of the average type (cf. examplein Section 2.3.3), but rather of the disjunctive type.
• The situation is similar for the updating problem (see Section 2.3.3), except thatthe conflict is to be defined between observed values (new information) and pre-dicted values of the real world.
• In the case of the global point of view (see Section 2.3.2), the general rule isto solve the conflict by making a compromise, except when the conflict is toostrong, in which case no combination should occur. The further processing of theconflicting points of view is too dependent on the application to be detailed here.Let us say that in the case of multicriteria decision making where points of vieware preferences among pair of objects, conflicting criteria are not merged, and thisoften leads to an incomparability between some objects (principle of discordancein ELECTRE-type methods46).
A last point is that, in some cases, meta-knowledge could help to solve conflicts,indicating for example that in some situations certain sources are preponderantor should be discarded. Usually, meta-knowledge is not used in multicriteria ormulti-persons problems, but it happens to be more useful in the combination ofregulations. At least the above example of the Christian soldier seems to requiremeta-knowledge.
4.2. Place of Meta-Knowledge
Meta-knowledge has an important role in the combination process espe-cially in logic-based aproaches to fusion. Information that is manipulated in thecombination process can be partitioned, and is often represented, in differentways.
Input information: The information to be combined. It is object-level information,and has been described above.
Combination information: The information used to facilitate combination. This iscomposed of structural information and domain information.
Structural information: Information about the input information. For example,information about• the sources of the object-level information,• the reliability of sources,
FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1123
• preferences about the information.Structural information is a form of meta-level information.
Domain information: Information on the context or domain of the input infor-mation. This is used to constrain the combination process. Examples ofdomain information include integrity constraints such as “everybody is eithera man or a woman” and “a cube has 6 sides”. Domain information canbe uncertain, such as for example heuristics. Though using uncertain infor-mation significantly increases the difficulty of combining input information.Domain information can contain both object-level information and meta-level information.
Combination information constitutes extra information that can be used bythe combination process in order to combine the input information. Neitherdomain information nor structural information needs to be in the same formalismas the input information. The only constraint on the formalisms is that they canbe used by the combination process.
To illustrate these concepts, consider the following example. We have twosources of information S1 and S2 and we wish to combine the input information.
S1: The color of the object is blue.S2: The color of the object is green.
We also have the following domain information and structural information.
Domain: Green and blue are different colors.Structural: The domain information is more reliable than source S1.Structural: Source S1 is more reliable than source S2.
In forming the combined information, we can accept the information fromS1, because it is consistent and from the most reliable source. However, wecannot now add the information from S2 since it would cause an inconsistency.
4.3. Modalities of Conflict Resolution
Immediate resolution of inconsistency by arbitrarily removing someformulae can result in the loss of valuable information. This can include lossof information that is actually correct and also loss of information that can beuseful in managing conflicts. Immediate resolution can also unduly constraincognitive activities such as problem solving and designing.21
Identifying the appropriate inconsistency handling strategy depends on thekinds of inconsistency that can be detected and the degree of inconsistency tol-erance that can be supported. Possible kinds of actions include:
Circumventing the inconsistent parts of the information. This can be viewed as ignor-ing the inconsistency, and using the rest of the information regardlessly. This maybe appropriate in order to avoid inconsistent portions of the information and/or todelay resolution of the inconsistency. Isolating inconsistency is a special case wherethe minimally inconsistent subset of the information is not used in the reasoning— it is isolated — but not deleted.
Ameliorating inconsistent situations by performing actions that “improve” these sit-uations and increase the possibility of future resolution. This is an attractive

1124 BLOCH AND HUNTER, ET AL.
approach in situations where complete and immediate resolution is not possi-ble (perhaps because further information is required from elsewhere), but wheresome steps can be taken to “fix” part or some of the inconsistent information.This approach requires techniques for analysis and reasoning in the presence ofinconsistency.
Sequencing of conflicts so that some conflicts are addressed before others. The cri-teria for sequencing are diverse but may include:
Granularity of inconsistency: Some conflicts are more significant than others.Furthermore, it is possible that solving a less significant conflict before a moresignificant conflict may unduly constrain the allowed solutions for the moresignificant conflict. Solving bigger or more important conflicts first meansthat we need to order the conflicts. For instance, when designing a building,first solve the conflicts that are about its “function” (deciding what this build-ing is for will determine its height, its surface � � � ), then solve the conflictsabout the “inside” of the building (this will determine the number of rooms,the exact places of the walls � � � ), and then solve the conflicts about “dec-oration” (this will finally determine the style of the curtains and the colorof the walls, � � � ). For this, the notion of topic-hood of information, such asin Refs. 10, 14, and 26, is potentially useful. This could allow us to say that“inconsistent set X is about topic T”, and may be used in determining thesignificance of the inconsistency.
Temporality of inconsistency: Other temporal constraints can impose an order-ing on the sequence of resolution of conflicts. For example, in a buildingproject, delaying the resolution of conflicts about the position of a wall istemporally more sensitive than delaying the resolution of conflicts about thecolor of the paint on the wall, since the construction of the wall needs to becompleted before the wall is painted. Clearly the color of the paint can bechosen before the position of the wall.
For the above examples, it can be seen that there is an overlap in granularityand temporality of inconsistencies. However, an example of equally significantinconsistencies, where the first is more temporally sensitive, is choice of paint forthe ceiling of a room, and a choice of color for the walls. An example where someinconsistencies are far more significant than others, but where ultimately they areof equal temporal sensitivity, is in a book that is about to be published.
Resolving inconsistencies altogether by correcting any mistakes or resolving conflicts.This depends on a clear identification of the inconsistency and assumes that theactions required to fix it are known.
Circumventing, ameliorating and sequencing inconsistency all imply that theresolution of conflicts or inconsistency is delayed. In practice applications usu-ally involve multiple conflicts of diverse kinds and significance. As a result, acombination of circumventing, ameliorating and sequencing of inconsistency isrequired.
5. VARIOUS FUSION PROBLEMS
Here we take the point of view of information combination, as opposed toSections 2 and 3, which was rather focused on information representation.
We first restate why uncertainty, preference, regulation are different in com-bination. Although the items to be fused (e.g., distribution functions over a setof interpretations, or sets of weighted formulas) may look somewhat similar invarious problems, there exist different types of fusion problems according to theirintended purpose (and what is modeled).
FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1125
Let us first consider the uncertainty versus preference fusion problems.When we are combining uncertain pieces of information, we are basically inter-ested in locating where is the truth, where is the true state of the world. In sucha case there is no possible idea of compromise as may be the case in preferencecombination where we may, for instance, finally choose an alternative which isvery bad with respect to one criterion and good with respect to others, if somecompensation is allowed. On the contrary, if a state is excluded by one (reliable)source given some uncertain observation, it should remain excluded after thecombination, when dealing with the uncertain location of the truth (at least ifthere is some area of common agreement between the sources).
This suggests that in uncertainty fusion, logical (i.e., conjunction anddisjunction-based) combinations play a basic role, while averaging aggregationscan be used in preference combination (where logical aggregations are alsoof interest, especially when no compensation is allowed). However, averag-ing aggregation may be used in uncertainty combination when the pieces ofinformation can be viewed as coming from a single random source.
The combination of regulations looks like a problem of combining priori-tized, context dependent, constraints. This seems to be the case when we have tomerge conflicting regulations. This clearly differs from preference aggregation,since no compromise can be found between constraints. Only, less prioritizedconstraints which apply in a given context may be given up if they conflict withmore prioritary ones (which are also applicable in the context).
In case of heterogeneous sources of information using different representa-tion formats, the refinement of partitions of a universe of discourse by combiningdifferent partitions (whose elements might be weighted) raise specific issues (forwhich C-calculus9 and rough sets36 may offer specialized tools).
Summarizing, in fusion problems we have to take care of the representationframework which is used (and especially of the interpretation of the scales),and also the nature of the combination problem. However, the problem clearlyinfluences the representation framework: preferences and uncertainty are notnecessarily represented in the same formal framework.
In this section, we survey general classes of fusion problems, which are firstcharacterized by the type of information involved. We briefly discuss the mainrepresentation tools, the information fusion modes, rules, or principles, and thedifficulties and specificities of the problem.
5.1. Fusing Uncertain Observations from Parallel Sources
In this kind of problem, the aim is to integrate the available (partial, uncer-tain, imprecise) information about what the actual world is. Typical examples aresensor fusion or expert opinion pooling.
For combining the different pieces of information, a common fusion spacehas to be defined. This is especially important in case of heterogeneous sources.This step may induce imprecision via refined granularity.
The actual combination is often made based on assumptions of the sources:• If all sources are reliable, a conjunctive fusion can be performed, possibly withnormalization.

1126 BLOCH AND HUNTER, ET AL.
• If the sources are dependent, idempotent operators are often used.• If the sources are independent, information can be reinforced.• If the sources are identical and independent, this corresponds typically to the caseof random experiments, hence statistics and averaging can be used.
More difficult are cases where the information is conflicting, which happensin particular if the sources are heterogeneous. On the basis of possible conflicts itshould be found what information is true, which is a difficult part of the problem.
Let us discuss some ways of dealing with conflict in this type of problem.At first some pre-processing can be performed, e.g., by deleting erroneous dataif possible, or improve data (this may also be one of the aims of fusion). Alsoirrelevant sources can be ignored if they can be identified as such (irrelevancycorresponds in this case to sources that are talking about something else), orexperts can be tested.
At the combination level, the choice of an operator is crucial. Conjunctivecombination operators are discontinuous in the presence of conflicts and mayprovide no interesting result at all. Averaging is not realistic since such opera-tions may provide answers that are given by none of the sources, or even rejectedindividually by each source. If some of the sources are assumed to be reliable,disjunctive operators can be used, which will retain all answers from all sources,at the price of increased imprecision. Other operators are more adaptive, in thesense that the underlying assumptions adapt according to the level of conflict.Another solution consists of weighting the sources, through reliability factors anddiscounting. This assumes that reliable sources can be identified. Sometimes itis difficult to define reliability factors as numbers, but an ordering can be pro-vided, from which priorities can be defined. They may depend on reliability, onspecificity, etc. Indeed, conflict often appears between sources of different speci-ficities, and in such cases, the most specific sources (if reliable) have to be givenmore weight. We can also choose not to combine or to delay the combination ifnone of these cases apply (see Section 4).
Mathematical frameworks used in this domain are Bayesian decision theory,likelihoods, fuzzy and possibilistic approaches, Dempster–Shafer, random sets,upper and lower probabilities, etc.
Examples of such fusion problems can be found in some of the papers of thisissue (submarine example by Ayoun and Smets3 and by Grabisch and Prade,25
candidate assessment example by Dubois et al.16 (where different expert opinionsare to be fused), situation assessment by Appriou2).
5.2. Fusing Preferences
The aim of fusing preferences is to find a consensus among individuals. Thisconsensus should correspond to the average opinion, which is likely to avoidextreme positions. It is typically a problem of social choice, for which fully-fledgedliterature exists. The question is whether the social choice problem is the sameas the multicriteria decision-making problem. We might suggest to answer “no”,despite analogy. The evaluation of an object from several points of view by asingle individual (multiple criteria evaluation) is out of the scope of fusion (not
FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1127
several sources, strictly speaking). Merging desires of one individual often impliescompensatory trade-offs, while merging desires from several individuals oftenimplies egalitarian trade-offs.
In this type of problem, scaling difficulties occur. The ways to measure pref-erences are not easy to define and this step should be carefully performed, con-sidering in particular commensurability constraints.
Mathematical frameworks used in this domain are:
• For absolute preferences: numerical scales or qualitative scales (finite, ordinal),vector-ranking methods, social welfare functions,35 fuzzy set theory,19�41 fuzzyintegrals.24
• For pairwise preferences:39 crisp preference modeling (but Arrow’s paradox), fuzzypreference modeling.
In the following papers of this issue, the example of referee assignmentproblem (by Benferhat and Lang6) belongs to this class, as well as the candidateassessment example16 due to its multiple criteria aggregation facet. In this exam-ple, it will be shown that there might be conflicts between preferences andregulations.
5.3. Fusing Databases
The problem of fusing databases arises as soon as one wants to access severaldatabases at the same time. This is the case of the so-called federated databases.Generally, the aim of fusing databases is to provide the user with more informa-tion. For instance, by accessing the different bibliography databases that exist inhis research institute, a searcher may be able to access more references.
Fusing databases raises classical problems of fusing which are heterogenityand contradictions.
When merging information provided by different sources, the problem ofheterogeneous representations may arise, whatever this information is (beliefs,knowledge, preferences, norms � � � ). This problem (which should be addressedfirst) arises when the different sources do not share a common representation ofthe information, or equivalently, when they do not describe information in thesame language.
The problem of contradictions comes from the fact that data stored in thedatabases are not necessarily true in the real world. Indeed, if they were all truein the real world, since the real world exists, they should not be contradictory.For instance, information stored in a database is not true because the world haschanged and the database has not been updated. Or an information is not truebecause the agent who stored it made a mistake.
In this special issue, Cholvy and Moral11 address some instances of these twoproblems. In particular, they consider the problem of matching values where thepoint is to detect, in several databases, the tuples which describe the same infor-mation. They also suggest a pragmatic solution when the domains (for instance,the domain of values) are different from one database to another. They describean example in which the notion of Student is represented in the first databaseby a binary relation (which relates the names of students with the diplomas for

1128 BLOCH AND HUNTER, ET AL.
which they are preparing) and appears as a value of the attribute status of aternary relation in the second database. A more complete study of the differ-ent cases of schemas conflicts may be found in Ref. 40. As for the problem ofcontradictions, they describe two different logical solutions and their respectivedomain of validity.
5.4. Fusing Regulations
Regulations are sets of rules which express what is permitted, obligatory,or forbidden and under what conditions. In such a case, the information to berepresented and about which one wants to reason, is not a set of assertions whichexpress how the world is or how it is supposed to be, but how it should be. Forinstance, the sentence John drives on the right-hand side may be a knowledge ora belief an agent has on the real world, depending on the fact that John reallydrives on the right-hand side or not. In contrast, the sentence John ought to driveon the right-hand side expresses what should be in the real world, i.e, what isthe so-called ideal world. Similarly, the sentence driving on the right-hand sideexpresses what ideally should not be.
In an organization, it often happens that several regulations apply andthus, the problem of merging regulations arises. In order to illustrate this, letus consider an organization whose activity includes dealing with some secretinformation. This activity may be controlled by a first regulation which includesthe following statement: it is obligatory that any document containing somesecret information is kept in a safe when nobody is using that document. Assumenow that a second regulation, intending to improve efficiency and productivitywithin the organization states that: if nobody has used a given document forfive years, then it is obligatory to destroy this document by burning it. Since thesetwo regulations apply in the organization, the information they express mustbe merged. In this example, we can see that this can cause contradictions.Indeed, if a secret document has not been used for five years, what should bedone is not clear: should we have to keep it in the safe or should we have toburn it?
The problem of merging regulations will be addressed in this special issueby Cuppens et al.13 In their paper, the authors examine a practical example ofsecurity policies merging and they point out that the main problems raised byregulations merging are problems of semantic heterogeneity, of completenessand of conflicting norms.
5.5. Fusing Data Material and Rule Bases
In industrial applications, empirical data and expert rules are used simulta-neously. Often there is a need to fuse these different types of knowledge. Some-times the desired result is an improved rule base, sometimes the aim is simplythe completion of the data using (maybe defeasible) inference. In many cases acommon framework for the representation of quantitative and qualitative knowl-edge is needed, because methods for learning, adaptation, updating, revision, etc.
FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1129
have to be integrated. In this special issue, Siekmann et al.43 address the prob-lem of fusing time series (quantitative knowledge) and weighted rules given byseveral experts (qualitative knowledge). They analyze different approaches forthis fusion task and demonstrate the usefulness of neuro-fuzzy solutions in thecontext of stock index predictions.
Fusing data and rule bases aims at completing the data using (maybe defea-sible) inference or at improving the rules by means of data. This involves somelearning, and is close to data mining, where the aim is prediction.
Data mining consists in extracting interesting pieces of data, which may befor instance special, or rare ones. It is different from summarizing which aims atindicating generic trends (fusing for explaining), and from induction which aimsat extracting knowledge from data (fusing for generalizing).
5.6. Combination of Experts Assessments by Evaluating the Experts
The fusion of (subjective) expert opinions is often needed in industry. It isreasonable to combine the fusion with an evaluation of the experts: the better anexpert can express his uncertainty the higher his weight should be. In order tomeasure how good an expert’s assessment is, at least two criteria should be takeninto account: the accuracy and the informativeness of the expert. The derived“weights” of the experts can be used to guide the fusion. It should be notedthat this general method can be used not only in the case of human expertsbut also for other information sources such as mathematical prognosis models.In this special issue, Siekmann et al.43 use a probabilistic methodology for theevaluation and fusion of sources that was developed by Cooke.12 In their paperthe underlying probabilistic method is explained in detail, and it is shown how toapply this technique to the case of stock index predictions.
5.7. Examples
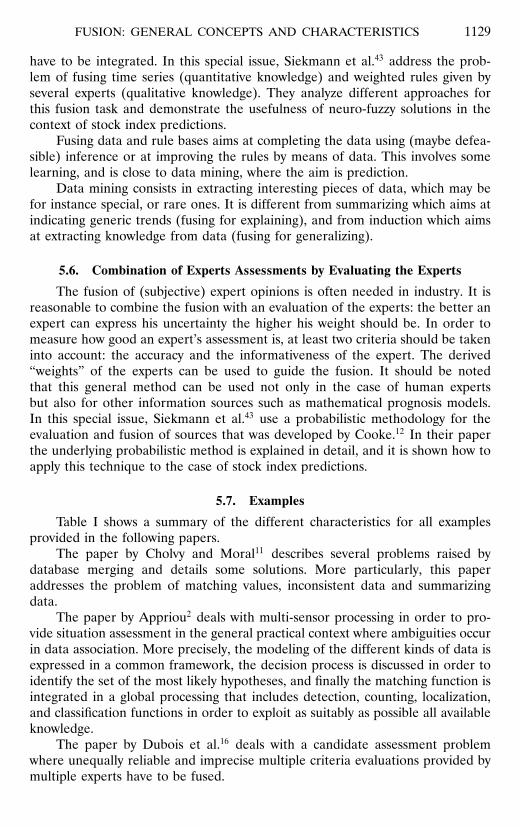
Table I shows a summary of the different characteristics for all examplesprovided in the following papers.
The paper by Cholvy and Moral11 describes several problems raised bydatabase merging and details some solutions. More particularly, this paperaddresses the problem of matching values, inconsistent data and summarizingdata.
The paper by Appriou2 deals with multi-sensor processing in order to pro-vide situation assessment in the general practical context where ambiguities occurin data association. More precisely, the modeling of the different kinds of data isexpressed in a common framework, the decision process is discussed in order toidentify the set of the most likely hypotheses, and finally the matching function isintegrated in a global processing that includes detection, counting, localization,and classification functions in order to exploit as suitably as possible all availableknowledge.
The paper by Dubois et al.16 deals with a candidate assessment problemwhere unequally reliable and imprecise multiple criteria evaluations provided bymultiple experts have to be fused.

1130 BLOCH AND HUNTER, ET AL.Ta
bleI.
Somecharacteristicsoftheexamplespresentedinthefollowingpapersinthisissue(G
=genericinformation,F=factual
information,S=static,D
=dynamic).
Typeof
RepresentationTools
Example
AimofFusion
Information
Static/Dynamic
andUncertaintyModels
Meta-Knowledge
Database11
Formingamodel
Beliefsandalso
SLogic,probabilistic
Reliabilityofthe
oftherealworld
knowledge
model,possibilistic
databases,integrity
(constraints)
model
constraints
Situation
Formingamodel
Measurements
S(Diftracking)Theoryofevidence,
Reliabilityof
assessment2
oftherealworld
(F)+Prior
probabilities,fuzzy
information+Domain
knowledge(G)
sets
constraints(conditions
ofmatching)
Candidate
Choice,finda
Expertopinions,
SPossibility,belief
assessment16
globalpointof
observations
functions
view
(G+F)
Paper
Findanassignment
Individual
S(Difrevision)Disutilityfunctions
Integrityconstraints
assignment6
(getaglobalpoint
preferences(F)+
(domaininfo.)
ofview,choice)
regulations(G)
underconstraints
Correlation125Correlation/association,
Uncertain
SFuzzyrelation
Possibility
situationassessment
measurements(F)
andpossibility
distributionsof
(how
theworldis)
theattributes
Correlation23
Detection+
Uncertain
STransferable
Eachsensor
localization(how
measurements(F)
beliefmodel
seesonetarget
theworldis)
(domaininfo.)
Robot
Updating/refining
Uncertain
DLogicalframework
Characteristics
localization45
observationsfrom
forevidence
oftherobot,
parallelsources
+theory(BFL)
environment
map(F
+G)
description
Merging
Detectandsolve
Regulations,
SDomainconstraints
regulations13
conflicts(geta
norms(G)
(rulesimposedby
globalpointofview)
someapplication
domain)
Stockindex43
Prediction(how
Expertopinions
DFuzzysets,
Reliabilityof
theworldwillbe)
andobservation
neuralnetwork,
expertrules
(G+F)
probabilitytheory

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1131
The paper by Benferhat and Lang6 illustrates the issue of merging heteroge-neous data consisting of individual preference profiles and global regulations onthe problem of finding a suitable assignment of a set of referees to each one of aset of papers submitted to a conference, given the preferences expressed by thereferees regarding the papers they are willing to review, the adequation betweentheir areas of competence and the topics of the papers, and a set of regulationsbearing on the global assignment.
The paper by Grabisch and Prade25 discusses the use of fuzzy relationand possibility theory-based methods in the correlation problem in sensorfusion (where inconsistencies between observations may be due to the existenceof multiple objects which are simultaneously observed and which should bedifferentiated); this problem is also addressed by Ayoun and Smets3 in thesetting of the transferable belief model.
The paper by Sossai et al.45 addresses the problem of fusing numerical infor-mation coming from parallel sources (different sensors mounted on a robot) withsymbolic knowledge (i.e., abstract description of the environment) to solve thelocalization problem for a mobile robot. To this aim, a logical framework is usedthat axiomatizes important properties of different theories of uncertainty (belief,probabilities and possibilities).
The paper by Cuppens et al.13 discusses the problems raised by mergingregulations by detailing an example of merging security policies.
The paper by Siekmann et al.43 deals with fusing data (databases of objectivemeasurable time series) and knowledge (in the form of rules) in the context ofstock index prediction.
6. CONCLUDING REMARKS ABOUT VALIDATION AND EVALUATION
We conclude this general introduction by a brief discussion of an importantbut difficult issue. How can a fusion system be validated and evaluated (and whatdoes it mean)? For addressing this question, we have to distinguish between theinputs, the fusion methods in use and the outputs of the system.
Indeed, a first issue is the testing of the sources. For instance, in expert opin-ion pooling, it means the calibration of experts for evaluating their faithfulnessand their tendency toward overconfidence. Generally speaking, it is important tomake sure that the information provided is correctly and accurately representedtogether with its reliability or level of confidence.12�42
Different types of fusion systems exist. The fusion process may create aunique new information base, or be an inference system which exploits theinformation provided by the different sources (based on some inconsistency-tolerant consequence relation) for answering queries, possibly with argumentsand counter-arguments about the answer. The fusion machinery itself should beappropriate to the nature of what is to be combined (e.g., are we aggregatingpreferences or fusing pieces of uncertain evidence?). The fusion operators shouldbe meaningful with respect to the scales which are used. The machinery shouldbe also sound. This means that it is based on a mathematically coherent frame-work. Moreover fusion operators can be characterized by means of postulates;

1132 BLOCH AND HUNTER, ET AL.
different general family of operators can thus be characterized; for instance wecan distinguish in a given representation framework between operators whichtolerate redundancy and operators which allow for reinforcement. The behaviorof the operator with respect to conflicts is also a key feature. An interesting cri-terion might also be the amount of information which is lost when transformingthe sets of information provided by the sources into a single body of informa-tion. Depending on the representation frameworks the expected loss of infor-mation may be more or less easily quantified. Another performance criterion isthe computational complexity of the system, a practical issue of interest, whichmay be traded off against the possible loss of information and other related cri-teria such as the possibility of providing the user with explanations about fusionresults.
For judging the value of the output of a fusion system from the point of viewof the intended application, different issues should be raised. First, we may havea collection of examples of input situations for which the expected answers ofthe fusion systems are known by experience or expertise. If this is known beforethe system is designed, it plays the role of constraints for the fusion process;in particular some of these examples may suggest general requirements that thefusion process should satisfy. It may also happen that further examples of vali-dated input/output are obtained later, that the fusion process fails to satisfy. Thismight be the case if the fusion result, playing the role of an “expert” predictioncan be further checked against reality. Then there may be several reasons forthis discrepancy. Either the new example violates principles on which the fusionprocess is based, which turns to be inappropriate, or the information provided bythe sources is, whatever the fusion machinery may be, insufficient for obtainingthe observed output. However, it might sometimes be difficult to determine theright reason in practice. Lastly, another issue of importance, far beyond the scopeof the present study, is the cognitive validation of the representation frameworkused for modeling the information coming from the sources and the informationprovided as a result to the user, to make sure that the information entered isproperly understood and that the information supplied is meaningful.
Clearly, all the above issues are very general, and it does not seem that thereexists yet many works on validation and evaluation of fusion systems. The aboveremarks are just guidelines which have to be made more precise before beingapplied to a particular case.
References
1. Alchourrón CE, Gärdenfors P, Makinson D. On the logic of theory change: Partialmeet contraction and revision functions. J Symbolic Logic 1985;50:510–530.
2. Appriou A. Situation assessment based on spatially ambiguous multisensor measure-ments. Int J Intell Syst 2001;16(10):1135–1166.
3. Ayoun A, Smets P. Data association in multi-target detection using the transferablebelief model. Int J Intell Syst 2001;16(10):1167–1182.
4. Bar-Shalom Y, Fortmann TE. Tracking and data association. San Diego: AcademicPress, 1988.
5. Baral C, Kraus S, Minker J, Subrahmanian VS. Combining multiple knowledge bases.Artificial Intell 1991;52:263–294.

FUSION: GENERAL CONCEPTS AND CHARACTERISTICS 1133
6. Benferhat S, Lang J. Conference paper assignment. Int J Intell Syst 2001;16(10):1183–1192.
7. Bloch I. Fusion of numerical and structural image information in medical imagingin the framework of fuzzy sets. In: Szczepaniak P et al., editors. Fuzzy systems inmedicine, Series studies in fuzziness and soft computing. Berlin: Springer-Verlag; 2000,p 429–447.
8. Bloch I, Maître H. Fusion of image information under imprecision. In:Bouchon-Meunier B, editor. Aggregation and fusion of imperfect information, Seriesstudies in fuzziness. Berlin: Springer-Verlag; 1997, p 189–213.
9. Caianiello ER. C-calculus: An overview. In: Caianiello ER, Aizerman MA, edi-tors. Topics in the general theory of structures, Dordrecht: D. Reidel; 1987,p 163–173.
10. Cazalens S, Demolombe R. Intelligent access to data and knowledge bases via user’stopics of interest. In: International Federation for Information Processing (IFIP) Con-ference, 1992, p 245–251.
11. Cholvy L, Moral S. Merging databases: problems and examples. Int J Intell Syst2001;16(10):1193–1221.
12. Cooke RM. Experts in uncertainty. London: Oxford University Press; 1991.13. Cuppens F, Cholvy L, Saurel C, Carrere J. Merging regulations: Analysis of a practical
example. Int J Intell Syst 2001;16(11):1223–1243.14. Cuppens F, Demolombe R. How to recognize interesting topics to provide cooperative
answering. Inform Syst 1989;14(2).15. Dubois D, Prade H, editors. Belief change. In: Gabbay DM, Smets P, editors.
Handbook of defeasible reasoning and uncertainty management systems. Dordrecht:Kluwer Academic Publishers; 1998, Vol 3.
16. Dubois D, Grabisch M, Prade H, Smets P. Using the transferable belief model and aqualitative possibility theory approach on an illustrative example: The assessment ofthe value of a candidate. Int J Intell Syst 2001;16(11):1245–1272.
17. Dubois D, Lang J, Prade H. Dealing with multi-source information in possibilisticlogic. In: ECAI, 1992, p 38–42.
18. Dubois D, Prade H, Yager R, editors. Fuzzy information engineering: A guided tourof applications. New York: Wiley; 1997.
19. Slowinski R, editor. Fuzzy sets in decision analysis operations research and statis-tics. Handbooks of fuzzy sets series (D). Boston: Kluwer Academic Publishers;1998.
20. Fagin R, Kuper G, Ullman J, Vardi M. Updating logical databases. Adv Comput Res1985;3:1–18.
21. Gabbay D, Hunter A. Making inconsistency respectable 1: A logical framework forinconsistency in reasoning. In: Fundamentals of Artificial Intelligence, Lecture Notesin Computer Science, 535. Berlin: Springer, 1991, p 19–32.
22. Gabbay DM, Hogger CJ, Robinson JA, Nute D, editors. Nonmonotonic reasoningand uncertain reasoning. Handbook of logic in artificial intelligence and logic pro-gramming. Oxford: Clarendon Press; 1994, Vol 3.
23. Gardenförs P. Knowledge in flux: Modelling the dynamics of epistemic states.Cambridge, MA: MIT Press; 1988.
24. Grabisch M, Nguyen HT, Walker EA. Fundamentals of uncertainty calculi with appli-cations to fuzzy inference. Theory and decision library series B/ Mathematical andstatistical methods. Dordrecht: Kluwer Academic Publishers; 1995, Vol 30.
25. Grabisch M, Prade H. The correlation problem in sensor fusion in a possibilisticframework. Int J Intell Syst 2001;16(11):1273–1283.
26. Hunter A. Intelligent text handling using default logic. In: Eighth IEEE InternationalConference on Tools with Artificial Intelligence TAI’96, Silver Spring, MD: IEEEComputer Society Press, 1996, p 34–40.
27. Hunter A, Nuseibeh B. Managing inconsistent specifications: reasoning, analysis andaction. ACM Trans Software Eng Method 1998;7:335–367.

1134 BLOCH AND HUNTER, ET AL.
28. Katsuno H, Mendelzon A. A unified view of propositional knowledge base update.In: Proceedings of the 11th International Joint Conference on Artificial Intelligence,1989.
29. Katsuno H, Mendelzon AO. Propositional knowledge base revision and minimalchange. Artificial Intell 1991;52:263–294.
30. Konieczny S, Pino-Pérez R. On the logic of merging. In: Proceedings of the 6thInternational Conference on Principles of Knowledge Representation and Reasoning,Trento, Italy, 1998, p 488–498.
31. Leung H. Neural networks data association with application to multiple-target track-ing. Opt Eng 1996;35(3):693–700.
32. Liberatore P, Schaerf M. BReLS: A system for the integration of knowledge bases.In: Cohn AG, Giunchiglia F, Selman B, editors. Proceedings of the 7th InternationalConference on Principles of Knowledge Representation and Reasoning KR 2000,Breckenridge, CO, San Francisco, CA: Morgan Kaufmann; 2000, p 145–152.
33. Maître H, Bloch I, Moissinac H, Gouinaud C. Cooperative use of aerial images andmaps for the interpretation of urban scenes. In: Ascona Workshop “Automatic Extrac-tion of Man-Made Objects from Aerial and Space Images,” Ascona, Switzerland,1995, p 297–306.
34. Motro A. A formal framework for integrating inconsistent answers from multipleinformation sources. Technical Report ISSE-TR-106. George Mason University, 1993.
35. Moulin H. Axioms of cooperative decision-making. Cambridge, UK: Cambridge Univ.Press; 1987.
36. Pawlak Z. Rough sets, theoretical aspects of reasoning about data. Dordrecht: KluwerAcademic Publishers, 1991.
37. Pearl J. Fusion, propagation, and structuring in belief networks. Artificial Intell1986;29:241–288.
38. Romine JB, Kamen EW. Modeling and fusion of radar and imaging sensor data fortarget tracking. Opt Eng 1996;35(3):659–673.
39. Roubens M, Vincke Ph. Preference modelling, Lecture Notes in Economics and Math-ematical Systems, 250. Berlin: Springer; 1985.
40. Saake G, Conrad S, Schmitt I. Database design. In: Webster JG, editor. Encyclopediafor electrical and electronics engineering. New York: John Wiley and Sons; 1999.
41. Saffiotti A. Fuzzy logic in autonomous robotics: behavior coordination. In: Proceed-ings of the 6th IEEE International Conference on Fuzzy Systems, Barcelona, SP, 1997,p 573–578.
42. Sandri SA, Dubois D, Kalfsbeek HW. Elicitation, assessment, and pooling of expertjudgments using possibility theory. IEEE Trans Fuzzy Syst 1995;3:313–335.
43. Siekmann S, Kruse R, Gebhardt J, von Guericke O, van Overbeek F, CookeR. Information fusion in the context of stock index prediction. Int J Intell Syst2001;16(11):1285–1298.
44. Léa Sombé. Revision and updating in knowledge bases. New York: John Wiley andSons; 1994.
45. Sossai C, Bison P, Chemello G. Fusion of symbolic knowledge and uncertain infor-mation in robotics. Int J Intell Syst 2001;16(11):1299–1320.
46. Vincke Ph. Aggregation of preferences: A review. Eur J Oper Res 1982;9:17–22.47. Winslett M. Updating logical databases. Cambridge: Cambridge University Press,
1990.





























