Embed Size (px)
DESCRIPTION
Citation preview

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Controller synthesis for piecewise affine slabdifferential inclusions
A duality-based convex optimization approach
Behzad Samadi Luis Rodrigues
Department of Mechanical and Industrial EngineeringConcordia University
CDC 2007, New Orleans
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 1/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Outline of Topics
1 Introduction
2 Stability Analysis
3 L2 Gain Analysis
4 Controller Synthesis
5 Numerical Example
6 Conclusions
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 2/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Motivation
Question: What is the dual of a piecewise affine (PWA)system?
It is still an open problem.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 3/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Motivation
Question: What is the dual of a piecewise affine (PWA)system?
It is still an open problem.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 3/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Piecewise Affine Slab Differential Inclusions
A continuous-time PWA slab differential inclusion is describedas
x ∈ ConvAiκx + aiκ + Buiκu + Bwiκw , κ = 1, 2y ∈ ConvCiκx + ciκ + Duiκu + Dwiκw , κ = 1, 2
for (x ,w) ∈ RX×Wi where Conv stands for the convex hull ofa set.
RX×Wi for i = 1, . . . ,M are M slab regions defined as
Ri = (x ,w) | σi < CRx + DRw < σi+1,
where CR ∈ R1×n, DR ∈ R1×nw and σi for i = 1, . . . ,M + 1are scalars such that
σ1 < σ2 < . . . < σM+1
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 4/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Piecewise Affine Slab Differential Inclusions
A continuous-time PWA slab differential inclusion is describedas
x ∈ ConvAiκx + aiκ + Buiκu + Bwiκw , κ = 1, 2y ∈ ConvCiκx + ciκ + Duiκu + Dwiκw , κ = 1, 2
for (x ,w) ∈ RX×Wi where Conv stands for the convex hull ofa set.
RX×Wi for i = 1, . . . ,M are M slab regions defined as
Ri = (x ,w) | σi < CRx + DRw < σi+1,
where CR ∈ R1×n, DR ∈ R1×nw and σi for i = 1, . . . ,M + 1are scalars such that
σ1 < σ2 < . . . < σM+1
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 4/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Piecewise Affine Slab Differential Inclusions
Practical examples:
Mechanical systems with hard nonlinearities such assaturation, deadzone, Columb friction
Contact dynamics
Electrical circuits with diodes
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 5/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Piecewise Affine Slab Differential Inclusions
Hassibi and Boyd (1998) - Quadratic stabilization and controlof piecewise linear systems - Limited to piecewise linearcontrollers for PWA slab systems
Johansson and Rantzer (2000) - Piecewise linear quadraticoptimal control - No guarantee for stability
Feng (2002) - Controller design and analysis of uncertainpiecewise linear systems - All local subsystems should be stable
Rodrigues and Boyd (2005) - Piecewise affine state feedbackfor piecewise affine slab systems using convex optimization -Stability analysis and synthesis using parametrized linearmatrix inequalities
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 6/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Objective
To introduce a concept of duality for PWA slab differentialinclusions
To propose a method for PWA controller synthesis for stabilityand L2-gain performance of PWA slab differential inclusionsusing convex optimization
Convex optimization problems are numerically tractable.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 7/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Objective
To introduce a concept of duality for PWA slab differentialinclusions
To propose a method for PWA controller synthesis for stabilityand L2-gain performance of PWA slab differential inclusionsusing convex optimization
Convex optimization problems are numerically tractable.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 7/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
PWA slab differential inclusion:
x ∈ ConvAiκx + aiκ, κ = 1, 2, x ∈ Ri
Ri = x | ‖Lix + li‖ < 1
Parameter set:
Ω =
[Aiκ aiκ
Li li
] ∣∣∣∣ i = 1, . . . ,M, κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 8/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
PWA slab differential inclusion:
x ∈ ConvAiκx + aiκ, κ = 1, 2, x ∈ Ri
Ri = x | ‖Lix + li‖ < 1
Parameter set:
Ω =
[Aiκ aiκ
Li li
] ∣∣∣∣ i = 1, . . . ,M, κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 8/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
Sufficient conditions for stability
P > 0,
ATiκP + PAiκ + αP < 0, ∀i ∈ I(0),
λiκ < 0,[AT
iκP + PAiκ + αP + λiκLTi Li Paiκ + λiκliL
Ti
aTiκP + λiκliLi λiκ(l2
i − 1)
]< 0,
for i /∈ I(0).
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 9/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
Dual parameter set
ΩT =
[AT
iκ LTi
aTiκ li
] ∣∣∣∣ i = 1, . . . ,M, κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 10/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
Sufficient conditions for stability
Q > 0,
AiκQ + QATiκ + αQ < 0, ∀i ∈ I(0), κ = 1, 2
µiκ < 0[AiκQ + QAT
iκ + αQ + µiκaiκaTiκ QLT
i + µiκliaiκ
LiQ + µiκliaTiκ µiκ(l2
i − 1)
]< 0,
for i /∈ I(0).
A new interpretation for the result in Hassibi and Boyd (1998)
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 11/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
L2 gain
PWA slab differential inclusion:
x ∈ ConvAiκx + aiκ + Bwiκw , κ = 1, 2, (x ,w) ∈ RX×Wi
y ∈ ConvCiκx + ciκ + Dwiκw , κ = 1, 2RX×Wi = (x ,w)| ‖Lix + li + Miw‖ < 1
Parameter set:
Φ =
Aiκ aiκ Bwiκ
Li li Mi
Ciκ ciκ Dwiκ
∣∣∣∣∣∣ i = 1, . . . ,M, κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 12/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
L2 gain
PWA slab differential inclusion:
x ∈ ConvAiκx + aiκ + Bwiκw , κ = 1, 2, (x ,w) ∈ RX×Wi
y ∈ ConvCiκx + ciκ + Dwiκw , κ = 1, 2RX×Wi = (x ,w)| ‖Lix + li + Miw‖ < 1
Parameter set:
Φ =
Aiκ aiκ Bwiκ
Li li Mi
Ciκ ciκ Dwiκ
∣∣∣∣∣∣ i = 1, . . . ,M, κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 12/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
L2 gain
Sufficient conditions for L2 gain performance
P > 0,[AT
iκP + PAiκ + CTiκCiκ ∗
BTwiκ
P + DTwiκ
Ciκ −γ2I + DTwiκ
Dwiκ
]< 0, ∀i ∈ I(0, 0),
(AT
iκP + PAiκ
+CTiκCiκ + λiκLT
i Li
)∗ ∗
aTiκP + cT
iκCiκ + λiκ li Li λiκ(l2i − 1) + cTiκciκ ∗
BTwiκ
P + DTwiκ
Ciκ + λiκMTi Li DT
wiκciκ + λiκ li M
Ti
(−γ2I + DT
wiκDwiκ
+λiκMTi Mi
) < 0
and λiκ < 0 for i /∈ I(0, 0).
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 13/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
Dual parameter set
ΦT =
AT
iκ LTi CT
iκ
aTiκ li cT
iκ
BTwiκ
MTi DT
wiκ
∣∣∣∣∣∣ i = 1, . . . ,M, κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 14/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Dual parameter set
Sufficient conditions for stability
Q > 0,[AiκQ + QAT
iκ + BwiκBTwiκ
∗CiκQ + DwiκBT
wiκ−γ2I + DwiκDT
wiκ
]< 0, ∀i ∈ I(0, 0)
(AiκQ + QAT
iκ+Bwiκ
BTwiκ
+ µiκaiκaTiκ
)∗ ∗
LiκQ + Mi BTwiκ
+ µiκ li aTiκ µiκ(l2i − 1) + Mi M
Ti ∗
CiκQ + DwiκBT
wiκ+ µiκciκaT
iκ DwiκMT
i + µiκ li ciκ
(−γ2I + Dwiκ
DTwiκ
+µiκciκcTiκ
) < 0
and µiκ < 0 for i /∈ I(0, 0).
A new result that extends the result in Hassibi and Boyd(1998) for ci 6= 0
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 15/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
PWA controller synthesis
Consider the following system:
x ∈ ConvAiκx + aiκ + Buiκu, κ = 1, 2, x ∈ Ri
Ri = x | ‖Lix + li‖ < 1
The stability conditions corresponding to the dual parameterset is used to formulate the synthesis problem.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 16/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
PWA controller synthesis
Controller synthesis problem:
Q > 0,
AiκQ + QATiκ + BuiκYi + Y T
i BTuiκ
+ αQ < 0,
for i ∈ I(0), κ = 1, 2 , and
µi < 0
AiκQ + QAT
iκ
+BuiκYi + Y Ti BT
uiκ
+αQ + µiaiκaTiκ
+aiκZTi BT
uiκ+ BuiκZia
Tiκ
+BuiκWiBTuiκ
∗
(LiQ + µi lia
Tiκ
+liZTi BT
uiκ
)µiκ(l2
i − 1)
≤ 0,
for i /∈ I(0) and κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 17/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
PWA controller synthesis
New variables:
Yi = KiQ
Zi = µiki
Wi = µikikTi
There is a problem: Wi is not a linear function of theunknown parameters µi , Yi and Zi .
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 18/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
PWA controller synthesis
Two solutions:
Convex relaxation: Since Wi = µikikTi ≤ 0, if the synthesis
inequalities are satisfied with Wi = 0, they are satisfied withany Wi ≤ 0. Therefore, the synthesis problem can be madeconvex by omitting Wi .
Rank minimization: Note that Wi = µikikTi ≤ 0 is the
solution of the following rank minimization problem:
min Rank Xi
s.t. Xi =
[Wi Zi
ZTi µi
]≤ 0
Rank minimization is also not a convex problem. However,trace minimization works practically well as a heuristic solution
min Trace Xi , s.t. Xi =
[Wi Zi
ZTi µi
]≤ 0
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 19/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
L2 gain PWA controller synthesis
Consider the following system:
x ∈ ConvAiκx + aiκ + Buiκu + Bwiκw , κ = 1, 2,y ∈ ConvCiκx + ciκ + Duiκu + Dwiκw,for (x ,w) ∈ RX×Wi = (x ,w)| ‖Lix + li + Miw‖ < 1
The L2 conditions corresponding to the dual parameter set isused to formulate the synthesis problem.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 20/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
L2 gain PWA controller synthesis
L2 gain controller synthesis problem:Q > 0,
AiκQ + BuiκYi
+QATiκ + Y T
i BTuiκ
+BwiκBT
wiκ
∗
(CiκQ + Duiκ
Yi
+DwiκBT
wiκ
)−γ2I + Dwiκ
DTwiκ
< 0
for i ∈ I(0), κ = 1, 2 , andµi < 0
AiκQ + Buiκ
Yi
+QATiκ + Y T
i BTuiκ
+BwiκBT
wiκ+ µi aiκaT
iκ
aiκZTi BT
uiκ+ Buiκ
Zi aTiκ
∗ ∗
(LiκQ + Mi B
Twiκ
+µiκ li aTiκ + li Z
Ti BT
uiκ
)µiκ(l2i − 1) + Mi M
Ti ∗
CiκQ + DuiκYi
+DwiκBT
wiκ+ µiκciκaT
iκ
ciκZTi BT
uiκ+ Duiκ
Zi aTiκ
Dwiκ
MTi
+µiκ li ciκ+li Duiκ
Zi
−γ2I + DwiκDT
wiκ+µiκciκcT
iκ + ciκZTi DT
uiκ+Duiκ
Zi cTiκ
< 0,
for i /∈ I(0) and κ = 1, 2
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 21/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
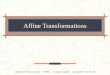
Surge model of a jet engine
Consider the following model (Kristic et al 1995):x1 = −x2 − 3
2x21 − 1
2x31
x2 = u
A bounding envelope is computed for the nonlinear functionf (x1) = −3
2x21 − 1
2x31
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 22/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
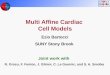
Modeling
By substituting the PWA bounds in the equations of thenonlinear system, we get a differential inclusion
x ∈ ConvAiκx + aiκ + Buu + Bww, x ∈ Ri
y = Cx + Dww + Duu (1)
where i = 1, . . . , 4, κ = 1, 2
The approximation error of the nonlinear function isconsidered as the disturbance input (w) and the objective isto limit the L2-gain from w to x1.
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 23/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Simulation
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 24/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Conclusions:
A new concept, dual parameter set, was introduced for PWAdifferential inclusions.
Using the dual parameter set, sufficient conditions for stabilityand L2 gain performance were obtained.
Convex methods were proposed for PWA controller synthesisfor stability and performance.
Note that the dual parameter set does not necessarily define aPWA system. The questions still is:
Does a dual system exist for a PWA system in general?
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 25/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Conclusions:
A new concept, dual parameter set, was introduced for PWAdifferential inclusions.
Using the dual parameter set, sufficient conditions for stabilityand L2 gain performance were obtained.
Convex methods were proposed for PWA controller synthesisfor stability and performance.
Note that the dual parameter set does not necessarily define aPWA system. The questions still is:
Does a dual system exist for a PWA system in general?
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 25/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Conclusions:
A new concept, dual parameter set, was introduced for PWAdifferential inclusions.
Using the dual parameter set, sufficient conditions for stabilityand L2 gain performance were obtained.
Convex methods were proposed for PWA controller synthesisfor stability and performance.
Note that the dual parameter set does not necessarily define aPWA system. The questions still is:
Does a dual system exist for a PWA system in general?
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 25/ 25

Outline Introduction Stability Analysis L2 Gain Analysis Controller Synthesis Numerical Example Conclusions
Conclusions:
A new concept, dual parameter set, was introduced for PWAdifferential inclusions.
Using the dual parameter set, sufficient conditions for stabilityand L2 gain performance were obtained.
Convex methods were proposed for PWA controller synthesisfor stability and performance.
Note that the dual parameter set does not necessarily define aPWA system. The questions still is:
Does a dual system exist for a PWA system in general?
Samadi, Rodrigues Controller synthesis for Piecewise Affine Systems 25/ 25