Embed Size (px)
DESCRIPTION
Wireless sensor networks (WSNs) havean intrinsic interdependency with the environments inwhich they operate. The part of the world with whichan application is concerned is defined as that applica-tion’sdomain.Thispaperadvocatesthatanapplicationdomain of a WSN can serve as a supplement to analysis,interpretation,andvisualisationmethodsandtools.Webelieve it is critical to elevate the capabilities of thedata mapping services proposed in [1] to make use of the special characteristics of an application domain. Inthis paper, we propose an adaptive Multi-DimensionalApplication Domain-driven (M-DAD) mapping frame-work that is suitable for mapping an arbitrary num-ber of sense modalities and is capable of utilising therelations between different modalities as well as otherparameters of the application domain to improve themapping performance. M-DAD starts with an initialuser defined model that is maintained and updatedthroughout the network lifetime. The experimentalresults demonstrate that M-DAD mapping frameworkperforms as well or better than mapping services with-out its extended capabilities.
Citation preview

An Integrated Inductive-Deductive Framework for
Data Mapping in Wireless Sensor Networks
Mohammad Hammoudeh, Robert Newman, Sarah Mount, Christopher DennettSchool of Computing and ITUniversity of Wolverhampton
Wolverhampton, UKEmail: m.h.h, r.newman, s.mount, c. [email protected]
Abstract—Wireless sensor networks (WSNs) have
an intrinsic interdependency with the environments in
which they operate. The part of the world with which
an application is concerned is defined as that applica-
tion’s domain. This paper advocates that an application
domain of a WSN can serve as a supplement to analysis,
interpretation, and visualisation methods and tools. We
believe it is critical to elevate the capabilities of the
data mapping services proposed in [1] to make use of
the special characteristics of an application domain. In
this paper, we propose an adaptive Multi-Dimensional
Application Domain-driven (M-DAD) mapping frame-
work that is suitable for mapping an arbitrary num-
ber of sense modalities and is capable of utilising the
relations between different modalities as well as other
parameters of the application domain to improve the
mapping performance. M-DAD starts with an initial
user defined model that is maintained and updated
throughout the network lifetime. The experimental
results demonstrate that M-DAD mapping framework
performs as well or better than mapping services with-
out its extended capabilities.
I. Introduction
WSNs are being deployed for an increasingly diverseset of applications each with different characteristics andenvironmental constraints. As a consequence, scientistsfrom different research fields have begun to realise the im-portance of identifying and understanding the characteris-tics and special deployment needs of different applicationdomains. In many WSN deployments, the network ownershave some knowledge about the monitored environmentcharacteristics in which the target system operates. Forexample, in forest fire applications [2], [3], informationabout the forest topography can be obtained from GISsystems or satellites maps.
A domain model carries knowledge of an application do-main. It is a conceptual model of a system which describesthe various real world entities involved in that system andrelationships between them. The domain model providesa structural view of the system which we suggest using tocomplement the information gained from analysing datagathered by a WSN. The logical integration of a domainmodel and sensory data from multiple heterogeneous sen-sory sources can be effectively used to explain past obser-vations as well as to predict future observations. It exploitsthe local semantics from the environment of each sensor. Italso takes advantage of human guidance and informationfrom other available sources, e.g. satellites. Furthermore,it maintains the overall coherence of reasoning aboutthe gathered data and helps to estimate the degree ofconfidence using probabilistic domain models. The useof knowledge made available by the domain model canalso be a key to meeting the energy and channel capacityconstraints of a WSN system. The energy efficiency of thesystem can be improved by utilising a domain model in theprocess of converting data into increasingly distilled andhigh-level representations. Finally, domain models helpearly detection and reduction of the amount of ineffectivedata forwarding across the network, rather than sustainingthe energy expense of transmitting ineffective messagesfurther along the path to the destination.
II. Related Work
WSN applications that incorporate the special charac-teristics of the environment in which they operate arestarting to appear on the horizon. The authors of theBBQ [4] focus on using probabilistic models of the real-world to provide approximate answers efficiently. In con-

trast to our work, efforts such as BBQ [4] have adoptedan approach that assumes that intelligence is placed atthe edge of the network, such as a sink, which is assumedto be less resource constrained than the sensor nodes. Aninterrogation-based approach can not guarantee that allanomalies will always be detected. Finally, this approachwas found to be effective with stable network topologies.In highly dynamic network topologies the cost of checkingwhether the estimation is accurate becomes excessivelyhigh. Such a model will require collecting values of allattributes at one location at each time step, and the cost ofdoing so will most likely reduce any savings in source-sinkcommunication that might result.
Motivated by BBQ, Ken [5] exploits the fact that physi-cal environments frequently exhibit predictable stable andstrong attribute correlations to improve compression of thedata communicated to the sink node. This approach issubject to failure as basic suppression. It does not haveany mechanism to distinguish between node failure andthe case that the data is always within the error bound.They propose periodic updates to ensure models can notbe incorrect indefinitely. This approach is not suitablefor raw value reconstruction; for any time-step where themodel has suffered from failures and is incorrect, thecorresponding raw value samples will be wrong. Finally, asthe approach presented in [4], Ken can only handle staticnetwork topologies and does not make use of redundancy.
The authors of [1] propose a distributed data map-ping service where groups of network nodes cooperateto produce local maps which are cached and merged ata sink node, producing a map of the global network.The sink node receives periodic map updates from eachcluster head used to refine an up-to-date global map.The distributed mapping service is made of four modules:Application (contains the user defined applications, e.g.isopleth maps), Interpolation (a building block to generatemaps), In-network Processing (process raw data receivedfrom various cluster heads) and Routing (responsible fordata communication). This approach does not incorporatethe characteristics of the application domain.
III. M-DAD Mapping Framework Details
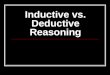
The proposed mapping framework, M-DAD, utilises ablend of both inductive and deductive models to establisha successful mapping between sense data and universal
structural knowledge
process of model building
sensed data model refinement
sensed data
Figure 1. Merging of inductive and deductive methods
physical principles. Deductive methods rely on a preciseapplication environment and the explicit knowledge, calledstructural knowledge, of the underlying domain using firstprinciples to create a model of the problem typically yield-ing governing equations [6]. On the other hand, inductivemethods utilises experimental data as the only source ofavailable knowledge [6]. Some applications can only betreated using experimental data knowledge due to the lackof other application domain knowledge. Nevertheless, theuse of inductive information helps in the generation of dataconsistency checks based on the structural knowledge ab-stractions given in the domain model. Finally, applicationshave been observed to perform significantly better if theyuse a combination of the two methods [7]. Figure 1 showshow the inductive and deductive methods can be mergedto capture the advantages of both methods. After thestructural knowledge is fed to the system model (deductiveprocess), the sense data is used to refine and complementthe basic structural model of the application domain. Thisrefinement procedure can be done continuously through-out the network life to keep consistent mapping betweenthe physical model and the sense data.
M-DAD makes use of knowledge given by the domainmodel in the map generation process. Knowledge fromdomain models provides guidance for map generationfrom high dimensional data set and has the potential tosignificantly speed up the map generation process anddeliver more accurate maps. To the best of our knowledge,only few previous studies have considered the domainmodel. For instance, Hofierka et al. [8] incorporate thetopographic characteristics to give better daily and annualmean precipitation predictions. The general lack of anappropriate data mapping framework for exploiting theserich sense data resources motivates this work.
Moreover, M-DAD mapping framework performs map-ping from related multiple types of the sense data toovercome the limitations of generating a map from a singlesense modality. A single sense modality map typically

reveals only a small number of aspects of the monitoredphenomena and is unable to infer the correct relationsamong other types in multi-modal sensing applications.In addition, high-throughput data sets also often containerrors and noise arising from imperfections of the sensingdevices. Maps generated from a combination of differenttypes of data are likely to lead to a more coherent mapby consolidating information on various aspects of themonitored phenomena. Additionally, the effects of datanoise on generated maps will be dramatically reduced,assuming that sensing errors across different data setsare largely independent and the probability an error issupported by more than one type of data is small. Anatural approach is to make use of the relation betweenthe multiple types of sense data to generate a map isto combine the maps generated from different types ofdata. We may combine the maps in different ways suchas accepting a value at an observation point only whenit is commensurate with all maps as defined in the givenmodel. More interestingly, and allegedly with guaranteesof delivering better maps, multiple types of data canbe analysed concurrently under an integrated relationalmodel. The latter method is novel in the sense that mostexisting n-dimensional interpolation schemes are definedby applying one-dimensional interpolation in each separatecoordinate dimension without taking advantage of theknown relations between diverse dimensions [9].
A. Multivariate Spatial Interpolation in M-DAD
Most spatial data interpolation methods are based onthe distance between the interpolation location P and thegiven set of data points. M-DAD defines a new metricfor distance, suitable for higher dimensions, in which theconcept of closeness is described in terms of relationshipsbetween sets rather than in terms of the Euclidean dis-tance between points. Using this distance metric, a newgeneralised interpolation function f that is suitable for anarbitrary number of variables is defined.
In multivariate interpolation every set Si correspondsto an input variable i.e. a sense modality, called i, andreferred to as a dimension. In M-DAD, the distancefunctions do not need to satisfy the formal mathematicalrequirements for the Euclidean distance definition. Thepower of such a generalisation can be seen when we includethe time variable as one dimension. The spatial data
interpolation problem can be stated as follows:Given a set of randomly distributed data points
xi ∈ Ω, i ∈ [1, n] , Ω ⊂ Rn (1)
with function values yi ∈ R, and i ∈ [1, N ] we require acontinuous function f : Ω −→ R to interpolate unknownintermediate points such that
f (xi) = yi where i ∈ [1, N ] . (2)
We refer to xi as the observation points. The integer nis the number of dimensions and Ω is a suitable domaincontaining the observation points. When rewriting thisdefinition in terms of relationships between sets we getthe following:Given N ordered pairs of separated sets Si ⊂ Ω withcontinuous functions
fi : Si −→ R, i ∈ [1, N ] (3)
we require a multivariate continuous function f : Ω −→ R,defined in the domain Ω = S1 ∪S2 ∪ ...∪Sn−1 ∪Sn of then-dimensional Euclidean space where
f (xi) = fi (xi)∀xi ∈ Si where i ∈ [1, N ] (4)
The proof is omitted for brevity.Using the point to set distance generalisation, the func-
tion f can be determined as a natural generalisationof methods developed for approximating univariate func-tions. Well-known univariate interpolation formulas areextended to the multivariate case by using GeometricAlgebra (GA) in a special way while using a point to setdistance metric. Burley et al. [10] discuss the usefulness ofGA for adapting univariate numerical methods to multi-variate data using no additional mathematical derivation.Their work was motivated by the fact that it is possibleto define GAs over an arbitrary number of geometricdimensions and that it is therefore theoretically possible towork with any number of dimensions. This is done simplyby replacing the algebra of the real numbers by that ofthe GA. We apply the ideas in [10] to find a multivariateanalogues of univariate interpolation functions.
B. Scale-based Local Distance Metric
In this section we modify the distance metric definedin Section III-A to include the knowledge given by thedomain model. The domain model helps to significantly

reduce the size of the support nodes set. The difference inthe size of the support nodes set can be several ordersof magnitude with increasing problem dimension. Theincrease in the support size can lead to an increase inthe computation and processing times of the interpola-tion algorithm and lead to the same drawbacks of globalinterpolation methods. Therefore, the proposed metricattempts to balance the size of the support sets with theinterpolation algorithm complexity as well as interpolationaccuracy.
We define the term scale for determining the weightof every given dimension with respect to P based on acombined Euclidean distance criteria and the informationalready known about the application domain a prior net-work deployment. While the term weight is reserved forthe relevance of a data site by calculating the Euclideandistance from that location to P . A special case is when fiis identical for all Si which means that all sets have thesame scale.
For the purposes of M-DAD we define a new scale-basedweighting metric, mP , which uses the information givenby domain model to alter the distance weighting functionto improve the interpolation results when applied to anarbitrary number of dimensions. In M-DAD, the supportset, Ci, for P is calculated using mP . Symbolically, Ci iscalculated as
Ci = L (d (P,Ej) , δ (Si)) ∀Ej ∈ Si (5)
where Si is a set of observation points, i ∈ [1, N ], L is alocal model that selects the support set for calculating P ,d is an Euclidean distance function, Ej is an observationpoint in the dimension Si, and δ(Si) a set of parametersfor dimension Si. Each dimension can have different setof parameters. These parameters are usually a set of rela-tionships between different dimensions or other applicationdomain characteristics such as obstacles. When predictingthe value of a point in dimension Si we refer to thatdimension as SP .
Uni-dimensional distance weighting functions can beextended to multi-dimensional distance weighting systemsas follows
ω = K (P, Si) , i ∈ [0, n] (6)
where K (P, Si) is the distance from the interpolationposition P to data set Si and n is the number of dimensions
in the system. Equation 6 can now be extended to includethe domain model parameters of arbitrary dimensionalsystem. Then the dimension-based scaling metric can bedefined as
mP =∑i
L (K(P, Si), δ (Si)) i ∈ [0, n] (7)
where Si 6= CP and CP is the dimension containing P .
IV. Distributed Self-Adaptation in Mapping
Services
A. Benefits of Self-Adaptation
In this section we extend the capabilities of M-DADto overcome challenges imposed by the described externalsystem changes, e.g. topographical changes, through ap-plying self-adaptation intelligence to continuously adaptto erratic changes in the application domain conditions.At run time, M-DAD integrates the sensory data withcontextual information to update the initial applicationdomain model provided by network owners to maintaina coherent logical picture of the world over time. Self-adaptation is particularly useful in long-term WSNs de-ployments where the environmental conditions changessignificantly over time which necessitate updating thedomain model to reflect the changes in the contextualknowledge provided by the physical constraints imposedby the local environmental conditions where sensors arelocated. This allows mapping services to evolve at run-time with less intervention of the user and leads to near-optimal and flexible design that is simple and inexpensiveto deploy and maintain. This adaptation procedure willrecover, over time, the effects of user domain modellinginaccuracies.
We realise that self-adaptation is a challenging problemand considerable work is being done by the researchcommunity in that area. However, in this work we aimto deal with a small set of adaptivity issues that have asignificant effect on the mapping services.
B. Adaptability Implementation in M-DAD
To implement adaptability in M-DAD we exploit theinterpolation capability of the network to perform localtraining of the map generation service. Each node usesthe readings of its surrounding nodes to predict its ownreading value (y′) using mP (eq. 7). Then, y′ is comparedto the node measured value, y. It is desirable that the

estimate of y′minimises the standard deviation (σ). Nodesmodify the size of the support set to include the minimumnumber of nodes needed to predict y with a certain levelof accuracy. Furthermore, in multi-dimensional applica-tions, nodes will change the weight of each dimensionto improve the prediction accuracy of y′. In fact, nodeswill alter the relationships between different dimensionsinitially given in the domain model in order to recoverthe effect of inaccuracies in the given domain model or toadapt to emerging environmental changes. In that, thesemodel updates influence the estimation results because y′
is calculated using mp. Finally, a prediction accuracycriterion, ∆, is defined as the average σj where σj =∑i
√(yi − y′i)
2j ∈ [1, n] and i ∈ [1, N ] where n is the
number of dimensions and N is the number of readings indimension j. Then ∆ is written as ∆ =
∑σj
n j ∈ [1, n].∆ must always be minimised to achieve the best mappingresults.
However, when individual nodes alter their programmeddomain model independently from the network, the map-ping service may become unstable because of the inconsis-tency in the domain model defined on various nodes. Suchinconsistencies may lead to inconsistent system states andconflicting differences in calculating mapping values. Toensure mapping stability we propose a Virtual CongressAlgorithm to manage global model updates locally.
The Virtual Congress Algorithm (VCA) provides ahigh-level collaboration environment in which the systemcan achieve globally efficient behaviour under dynamicenvironmental conditions. The network is viewed as avirtual congress where nodes are senators who vote forlegislating changes to the domain model in response tolocally detected environmental conditions. This algorithmis an attractive solution as senators collaboratively decideupon their local knowledge on the behaviour and correct-ness of the system. Logically related nodes, chambers, aregranted some power to impute the local changes, federallaws, that is not detected by all nodes in the network.A senator may introduce a proposal in the chamber as abill. To prevent overloading the chamber with proposals,each senator must monitor the changes over time usingequation ?? before putting them into a bill. Senatorssend their voting results to the proposing senator. Theproposing senator, upon receiving the required number of
votes υ disseminate the bill to the chamber and all nodesimplement the new changes that have been agreed on.The value of υ was empirically estimated to be over 50%of chamber population because it helps to avoid falsepositives. Once a bill is approved by one chamber, it issent to other chamber heads who may accept or reject it.In order for the bill to become a state law, all chamberheads must agree to identical version of the bill. Whenthe bill is submitted to the president, the sink node, hemay choose to sign the bill, thereby making it a state law.
V. Experimental Evaluation
Experiment 1: Incorporation of the Domain
Model in the Mapping Services
Aim: The aim of this experiment is to study the effect ofintegrating the knowledge given by the domain model intothe mapping services.
Procedure: In this experiment the effective thermal dif-fusivity in a cargo ship is studied. Some aspects of a cargoship fire were modelled, particularly, heat diffusion in themetal body of the ship. The model was restricted to asmall area of the ship deck which has two big doors. Thechosen part of the ship deck is modelled by a brass sheetwhich contains a hole segment excavation to model anopened door. A simple domain model was defined to carryinformation about doors that when opened they impactthe heat diffusion in the ship body. The hole segmentthat represents an opened door was excavated in thebrass sheet with 10mm width and 2cm length. A FLIRThermaCAM P65 Infrared (IR) camera [11] was usedto take sharp thermal images and produce an accuratetemperature analysis and results. The IR camera delivers320 × 240 IR resolution (640 × 480 pixels, full colour) at0.08C thermal sensitivity. Finally, a 1371oC blue flamewas placed on the middle of one edge of the brass sheetas a heat source. Brass (an alloy of copper and zinc) waschosen for this experiment because it is a good thermalconductor.
The first experiment was ran using the brass sheetbefore the hole segment excavation. After applying heat,thermal measurements from the Toradex Oak sensors wererecorded in addition to a thermal image taken by the IRcamera. The mapping services were ran over a subset ofthe data collected from this experiment to observe howthe heat will diffuse in the brass sheet in the absence

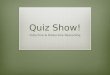
Figure 2. Heat diffusion map taken by ThermaCAM P65 Infrared(IR) camera.
of any obstacles. The same experiment was repeated onthe sheet with the segment hole excavation and sensorthermal measurements as well as a IR camera image weretaken after applying heat on the brass sheet. The mappingservice were ran using the same size of the thermal data-setused in the previous experiment. Three experimental runswere performed: (1) Run the mapping services withoutany domain model knowledge. Particularly, the presenceof the obstacle and its characteristics. (2) Run the map-ping service which integrates some of the domain modelknowledge. Particularly, the presence of the obstacle, itsposition, and length. (3) Run the mapping service whichintegrates all the knowledge given by the domain model.Particularly, the presence of the obstacle, its position,length, and strength.
Results and discussion: Figure 2 shows the heat diffu-sion map generated by the IR camera. Given that the heatis applied at the middle of the top edge of the brass sheetand the location of the obstacle, by comparing the left sideand right side areas around the heat source, this figureshows that the existence of the obstacle has an effect onheat diffusion through the brass sheet. It its observed thatthe obstacle strongly reduced the temperature rise in thearea on its right side. This map has been randomly down-sampled to 1000 points, that is 1.5% of the total 455×147to be used by the mapping service to generate the totalheat map.
Figure 3 shows the map generated by the distributedmapping service described in [1]. Compared with Fig-ure 2, the obtained map conserves perfectly the globalappearance and many of the details of the original mapwith 98.5% less data. However, the area containing theobstacle has not been correctly reconstructed and causedhard edges around the location of heat source. This is dueto attenuation between adjacent points and the fact that
Figure 3. Heat map generated by the standard mapping servicedefined in [1].
Figure 4. Interpolated heat map generated by M-DAD givenobstacle location and length.
some interpolation areas contain many sensor readingswith almost the same elevation. That asserts that modifi-cations to map generation services are sometimes neededin order to interactively correct the mapping parameters.
Figure 4 shows the map generated by the M-DADmapping framework. M-DAD was given some informationabout the application domain including the existence ofthe obstacle, its location and length. We observe that themap obtained by M-DAD conserves perfectly the globalappearance as the distributed mapping service (Figure 2).However, using the given local semantics, M-DAD reducedthe prediction error and visually it accurately captured theeffect of the heat obstacle on heat diffusion through thebrass sheet. The M-DAD generated map is smoother thanthat rendered with the distributed mapping services, onlyin some sub-regions containing the obstacle and aroundthe heat source location.
Figure 5. Interpolated heat map generated by M-DAD givenobstacle location, width and length.

Figure 5 shows the map generated by M-DAD with amore complex domain model than the previous M-DADversion (Figure 4). In this version we give M-DAD theobstacle width. We notice a better approximation to thereal surface near the obstacle. The new details included inthe domain model removed two artifacts from both endsof the obstacle. This is due to the inclusion of the obstaclewidth in weighting sensor readings when calculating P
which further reduces the effect of geographically nearbysensors that are disconnected from P by an obstacle.Conclusion: This experiment proves that the incorpo-ration of the domain model in the mapping service sig-nificantly improves the performance of the distributedmapping services.Experiment 2: Mapping from Related Multiple
Dimensions
Aim: The aim of this experiment is to study if mappingfrom related multiple types of the sense data can lead toan improved mapping performance by overcoming someof the limitations of generating a map from a single sensemodality.Procedure: 10 Toradex Sensors equipped with humidityand temperature sensors were placed over the brass sheet.Cold water was sprayed onto the brass sheet to increasethe humidity in order to make relationships between thetemperature and humidity more visible. Then, a blue flamewas placed on the middle of the top edge of the brasssheet. Finally, the following steps were performed: (1)one temperature reading was removed from the collecteddata set; (2) the distributed mapping service was usedto calculate the removed temperature reading using therest of the data set; (3) M-DAD was used to calculatedthe removed temperature reading using the rest of thedata set; (3) the standard deviation was calculated forthe temperature value resulted from 2 and 3; (4) steps 1to 4 were repeated for each of the 10 sensors temperaturereadingsResults and discussion: The relationship between thehumidity and temperature was used to create a temper-ature map using the humidity map. Figure 6 shows thestandard deviation of the calculated temperature valuesby M-DAD and the distributed mapping services. It isobserved that M-DAD reduced the standard deviation bybetween 0.17% to 12% compared to the standard mappingservice. This is done by constructing the support set from
M-DAD vs. standard Shepard
0
5
10
15
20
25
30
35
40
45
0 2 4 6 8 10Location
Sta
nd
ard
Dev
iati
on
Standard Shepard M-DAD
Figure 6. The standard deviation of temperature values at 10locations calculated by M-DAD using the humidity map.
nodes which are more related to P , for example, nodesthat have close humidity reading to that of P .
Conclusion: This experiment proves that mapping fromrelated multiple dimensions can improve the generatedmap quality. This observation is confirmed by the datashown in Figure 6. The results from this experiment andExperiment 1 confirms the general theory of M-DADdefined in Section III.
Experiment 3: Adaptations to Changes in the Do-
main Model
Aim: The aim of this experiment is the study the effective-ness of the proposed VCA in modifying the domain modelto better fit the current state of the application domain.
Procedure: The same experimental setup described inExperiment 1 is used here. The obstacle length was in-creased from 2cm to 3.6cm. Then, the bill which containsthe best detected obstacle length value, the federal laws,and the state laws were examined. Wireless communica-tions breaks caused by an obstacle attenuation are hard topredict, but can be estimated using published metrics suchthat in [12]. It was assumed that the obstacle is continuousand the existence of this obstacle between two directlycommunicating nodes will break the wireless links betweenthem. The local semantics of the application domain weredefined to interpret the break of direct wireless links be-tween two nodes while being able to communicate throughan intermediate node(s) as there exists an obstacle betweenthe two communicating nodes.
Results and discussion: Table I shows three M-DADmapping runs each with different node distributions. Wetest three different randomly distributed nodes topolo-gies because obstacle detection according to the model

Table IThe obstacle length (in pixels) in the best proposed bill
and the federal laws in three M-DAD mapping runs at 1000nodes density.
Run Num of bills Best bill Federal law1 17 59.57 52.02 19 60.0 57.743 14 60.0 52.0
described here is highly dependent on the nodes locationand density around the obstacle. Table I shows the numberof proposed bills, the best proposed bill and the agreed billfor each mapping run. We notice that the obstacle lengthwas always detected accurately and that the best proposedbill was not always agreed locally. This is partially due tothe cluster formation process which is able to deal withobstacles (see [13]). Nonetheless, the average VCA agreedbills in the three mapping runs was 53.91 pixels which isclose to the actual obstacle length (60 pixels). Adaptingto the new obstacle length improves the produced mapquality. Quantitatively, the RMS difference between themaps generated with 30 and 60 pixels obstacle lengthincreased by 1.0.
We notice that in the three mapping runs, zero billsbecame federal laws. This is because all the changes in theapplication domain were local to part of the network andthe majority of the clusters did not sense these changes.This illustrates the mutual benefit of localising the VCAand distributing it over two levels: the local/cluster level;and the global/network level.Conclusion: This experiment shows that VCA helps toadapt to some changes in the domain model in a dis-tributed manner. This experiment is an instance of thegeneral case studied in Experiment 2, particularly, we areusing the nearest neighbour triangulation RF connectivitymap as one dimension to predict the heat map. Therefore,the improved mapping performance proved in this exper-iment confirms the results found in Experiment 2.
VI. Conclusion
In this paper we propose a new mapping frameworkcalled M-DAD. M-DAD is capable of dealing with anarbitrary number of sense modalities, performs distributedself-adaptation, exploits the application domain model,and generates maps using relationships between differentsense modalities. M-DAD spontaneously responses to sys-
tem changes. It starts with an initial model then it adaptsand updates itself to give more precise image about thereal world through a training procedure. Experimentalresults shows that M-DAD improves the mapping qualityin terms of maps predictive error and smoothness.
References
[1] M. Hammoudeh, J. Shuttleworth, R. Newman, and S. Mount,
“Experimental applications of hierarchical mapping services in
wireless sensor networks,” in SENSORCOMM ’08: Proceedings
of the 2008 Second International Conference on Sensor Tech-
nologies and Applications, 2008, pp. 36–43.
[2] M. Hefeeda and M. Bagheri, “Wireless sensor networks for early
detection of forest fires,” in International Workshop on Mobile
Ad hoc and Sensor Systems for Global and Homeland Security
(MASS-GHS 07), Italy, October 2007.
[3] C. Hartung, R. Han, C. Seielstad, and S. Holbrook, “Firewxnet:
a multi-tiered portable wireless system for monitoring weather
conditions in wildland fire environments,” in MobiSys ’06: Pro-
ceedings of the 4th international conference on Mobile systems,
applications and services, 2006, pp. 28–41.
[4] A. Deshpande, C. Guestrin, S. Madden, J. Hellerstein, and
W. Hong,“Model-driven data acquisition in sensor networks,” in
VLDB ’04: Proceedings of the Thirtieth international conference
on Very large data bases. VLDB Endowment, 2004, pp. 588–
599.
[5] D. Chu, A. Deshpande, J. Hellerstein, and W. Hong, “Approx-
imate data collection in sensor networks using probabilistic
models,” in ICDE ’06: Proceedings of the 22nd International
Conference on Data Engineering, 2006, p. 48.
[6] P. Hertkorn and S. Rudolph, “From data to models: Synergies
of a joint data mining and similarity theory approach,” in SPIE
Aerosense 1999 Conference On Data Mining and Knowledge
Discovery, 1999.
[7] ——, “Dimensional analysis in case-based reasoning,” in Inter-
national Workshop on Similarity Methods, S. I. fr Statik und
Dynarnik der Loft-und Raumfahrtkonstruktionen, Ed., 1998,
pp. 163–178.
[8] J. Hofierka, J. Parajka, H. Mitasova, and L. Mitas, “Multivari-
ate interpolation of precipitation using regularized spline with
tension,” Transactions in GIS, vol. 6, pp. 135–150, 2002.
[9] K. C. Johnson, Multidimensional Interpolation Methods,
KJ Innovation, 2006, http://software.kjinnovation.com/
InterpMethods.pdf.
[10] M. Burley, K. Bechkoum, and G. Pearce, “A formative survey
of geometric algebra for multivariate modelling,” in UK Society
for Modelling and Simulation, 2006, pp. 37–40.
[11] F. Systems, “Thermacam p65,” http://www.flir.com.hk/p65
print.htm, 2008, [Online; accessed 6-November-2008].
[12] Extricom, Application Note - Wired and Wireless LAN Security,
Juniper Networks, November 2007.
[13] M. Hammoudeh, A. Kurtz, and E. Gaura, “MuMHR: multi-
path, multi-hop, hierarchical routing,” in International Con-
ference on Sensor Technologies and Applications (SENSOR-
COMM2007), 2007.