Truss Analysis Using the Stiffness Method
Analisis Rangka Batang dengan Metode Kekakuan
Ivindra Pane, ST, MSc, Ph.D
Structural Analysis 8 Ed. (Russel C. Hibbeler)
Prinsip Metode Kekakuan
Pada dasarnya terdapat 2 metode analisis struktur dengan matriks: metode kekakuan (metode perpindahan/displacement) dan metode gaya/fleksibilitas
Salahsatu kelebihan metode kekakuan adalah dapat digunakan untuk kasus statically determinate dan indeterminate secara langsung sehingga bila disajikan dalam bentuk matriks lebih sederhana (memudahkan pemograman komputer).
Aplikasi metode kekakuan memerlukan pembagian struktur pada sejumlah discrete finite element dan mengidentifikasi titik ujungnya sebagai suatu nodes
Untuk truss analysis, setiap member mewakili finite element dan joint mewakili suatu nodes, lalu force-displacement setiap elemen ditentukan dan satu sama lain dihubungkan dengan persamaan kesetimbangan gaya, dan pada akhirnya setiap hubungan itu dikumpulkan dalam suatu matriks kekakuan struktur (K)
Sebelum menyusun prosedur metode kekakuan, terdapat 3 konsep dasar yang perlu dipahami:
1. Member and Nodes Identification
2. Global and Member Coordinates
3. Kinematic Indeterminacy
Matriks Kekakuan Batang/Member
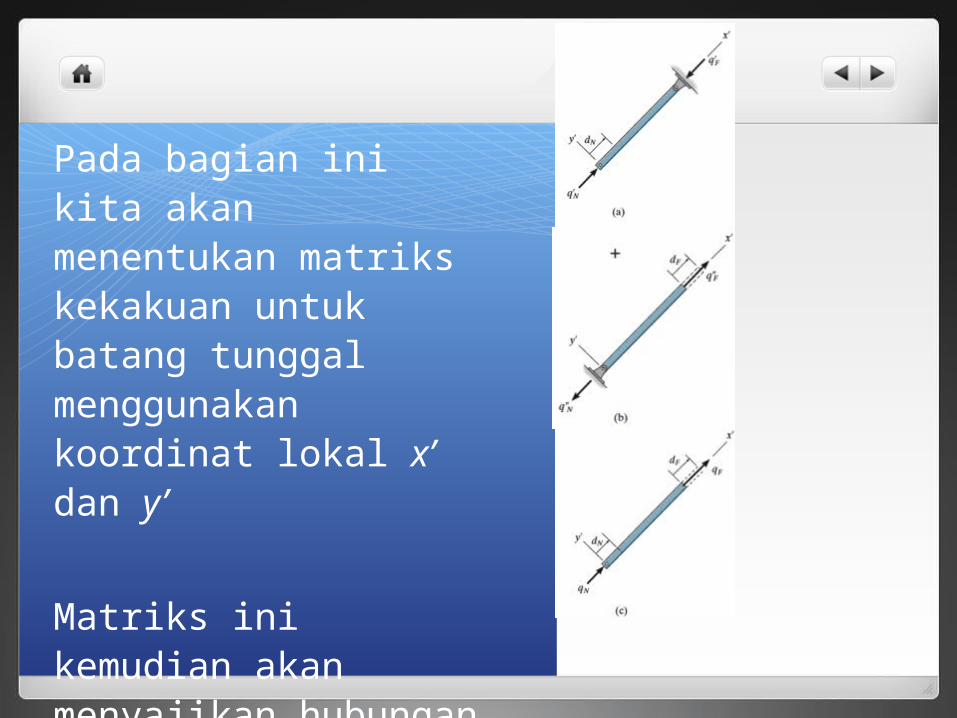
Pada bagian ini kita akan menentukan matriks kekakuan untuk batang tunggal menggunakan koordinat lokal x’ dan y’
Matriks ini kemudian akan menyajikan hubungan load-displacement untuk batang
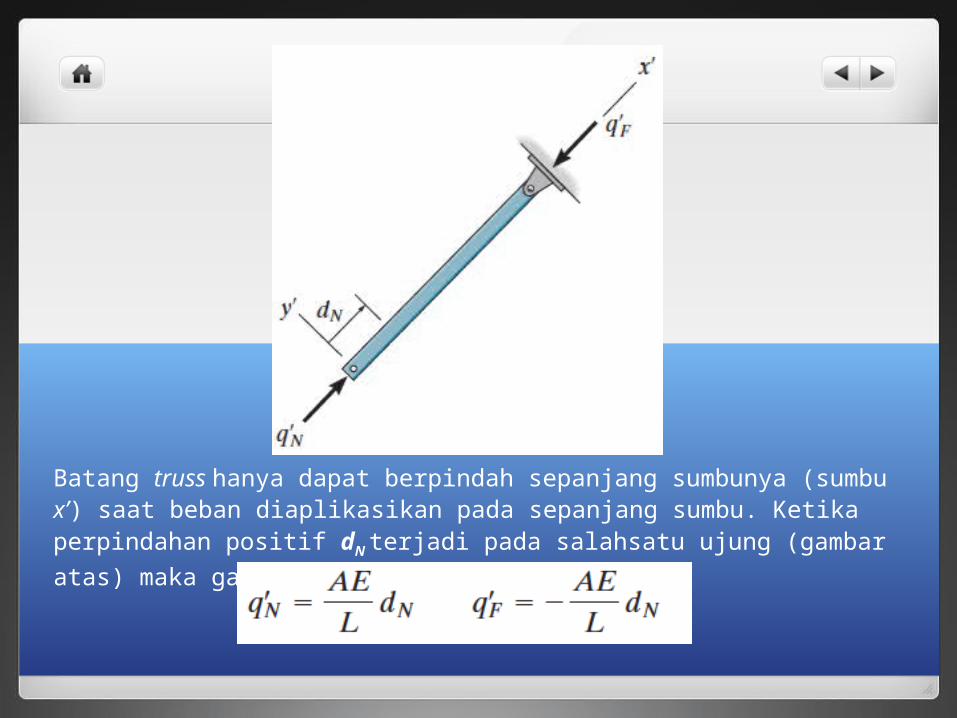
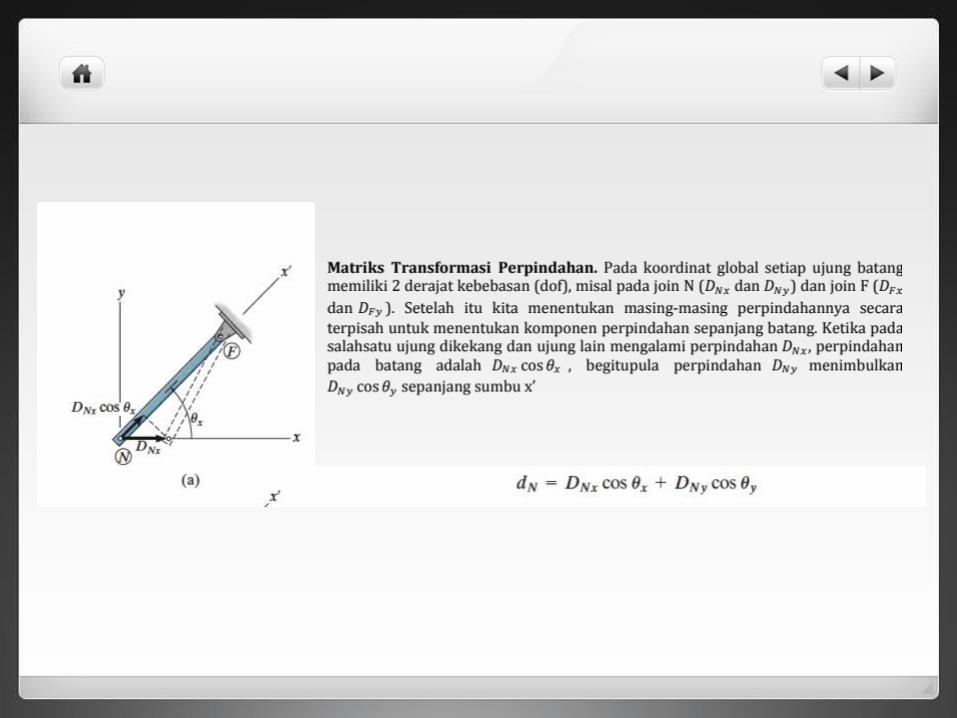
Batang truss hanya dapat berpindah sepanjang sumbunya (sumbu x’) saat beban diaplikasikan pada sepanjang sumbu. Ketika perpindahan positif dN terjadi pada salahsatu ujung (gambar atas) maka gaya yang bekerja adalah:
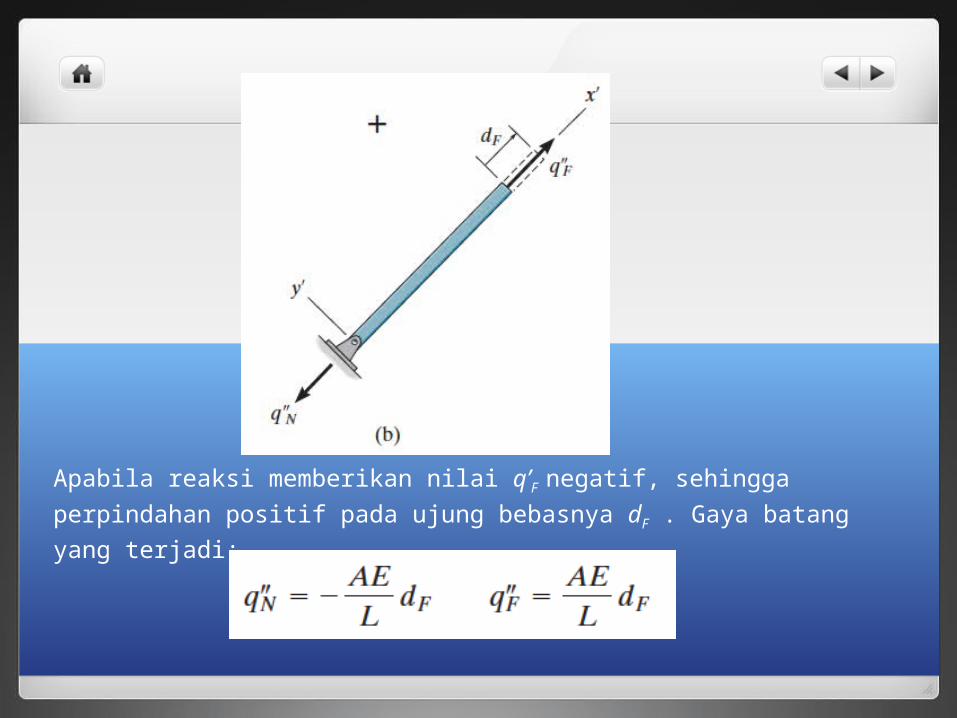
Apabila reaksi memberikan nilai q’F negatif, sehingga perpindahan positif pada ujung bebasnya dF . Gaya batang yang terjadi:
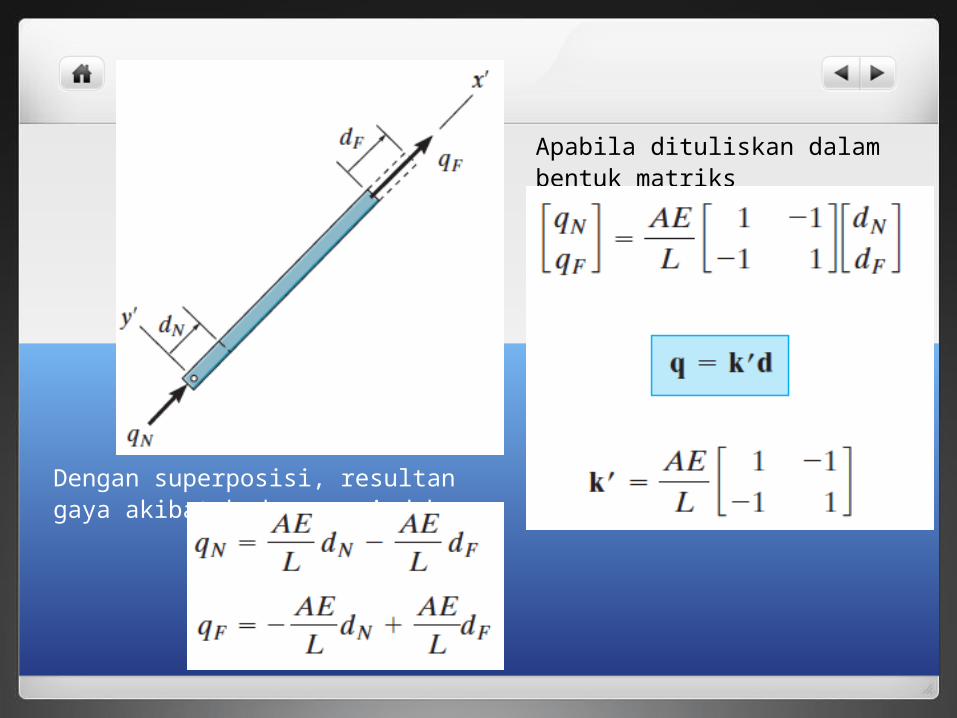
Dengan superposisi, resultan gaya akibat kedua perpindahan
Apabila dituliskan dalam bentuk matriks
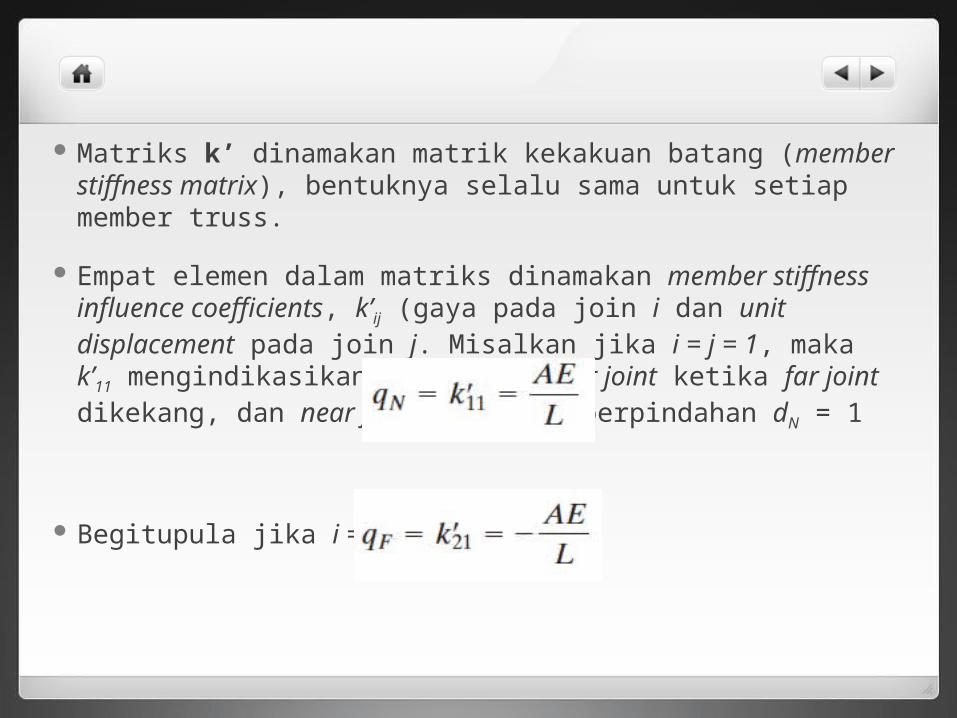
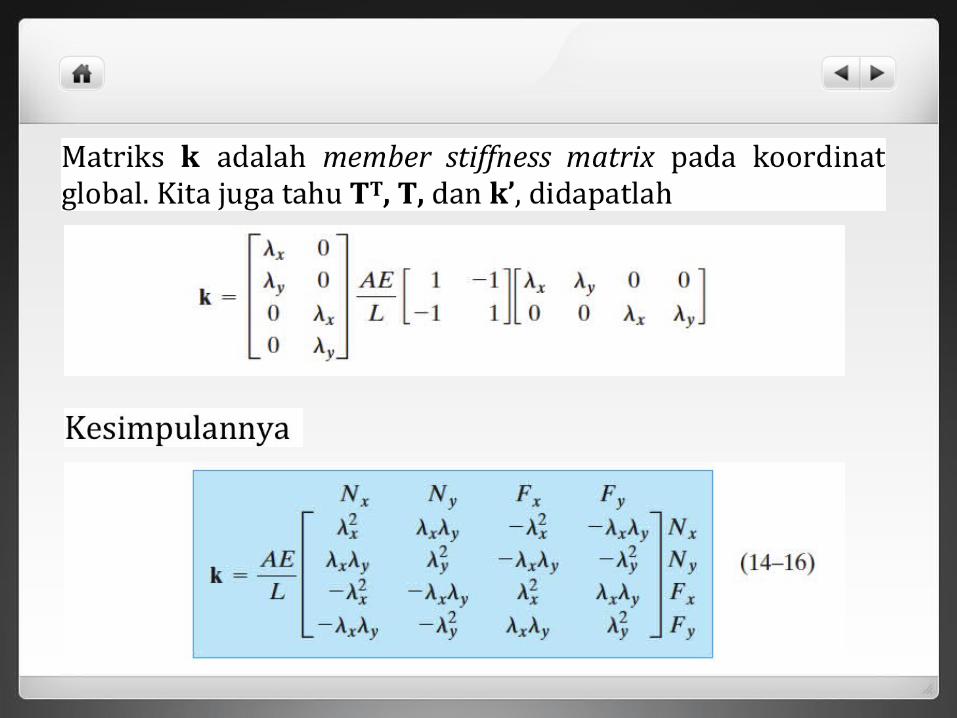
Matriks k’ dinamakan matrik kekakuan batang (member stiffness matrix), bentuknya selalu sama untuk setiap member truss.
Empat elemen dalam matriks dinamakan member stiffness influence coefficients, k’ij (gaya pada join i dan unit displacement pada join j. Misalkan jika i = j = 1, maka k’11 mengindikasikan gaya pada near joint ketika far joint dikekang, dan near joint mengalami perpindahan dN = 1
Begitupula jika i = 2, j = 1
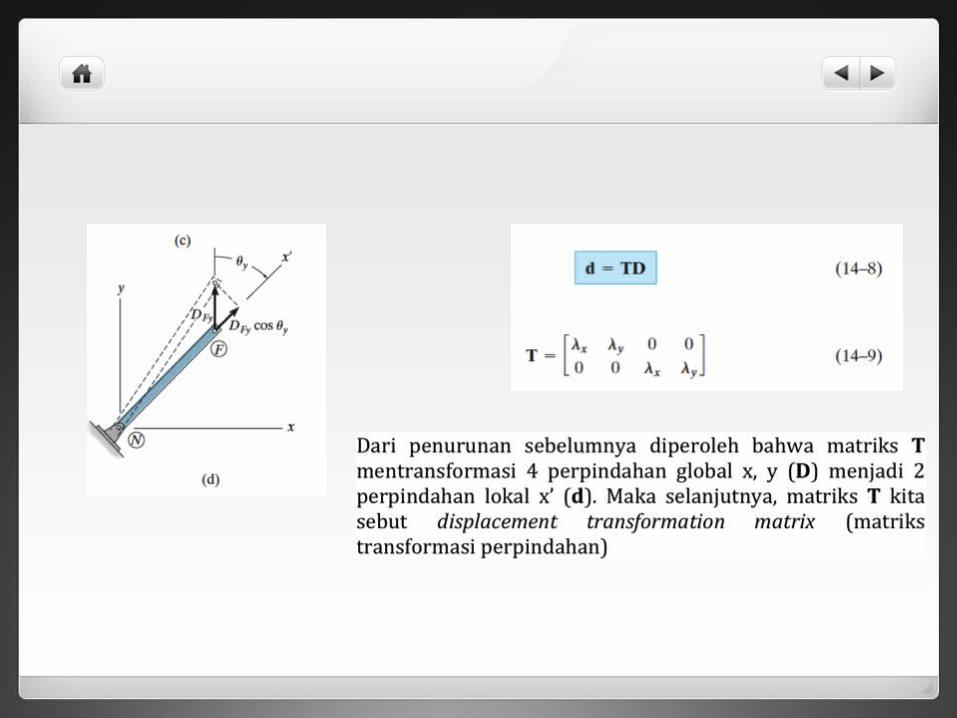
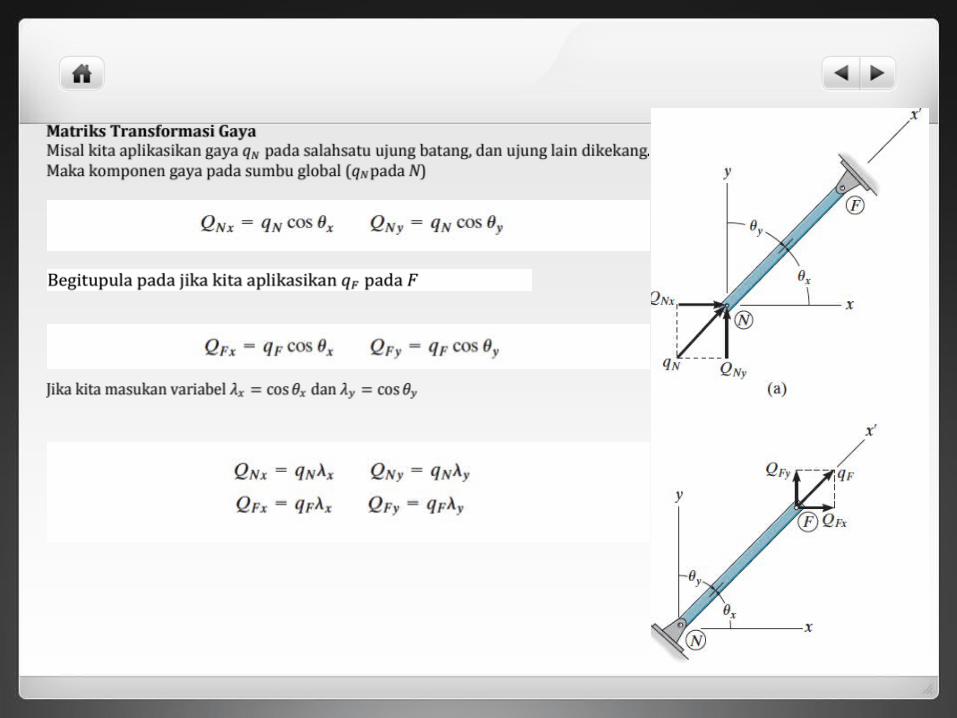
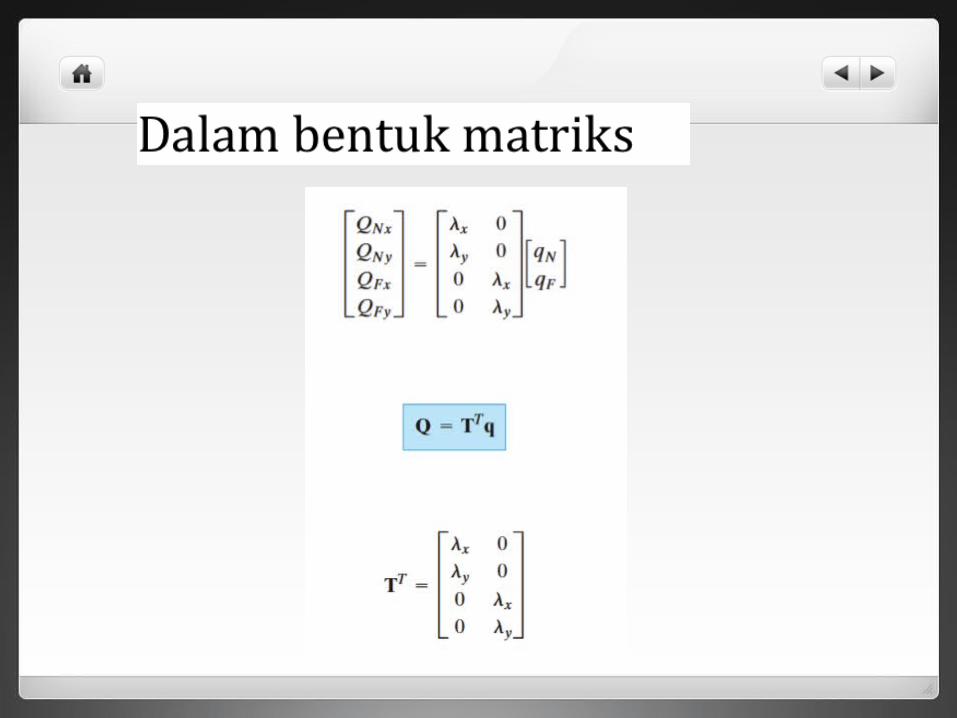
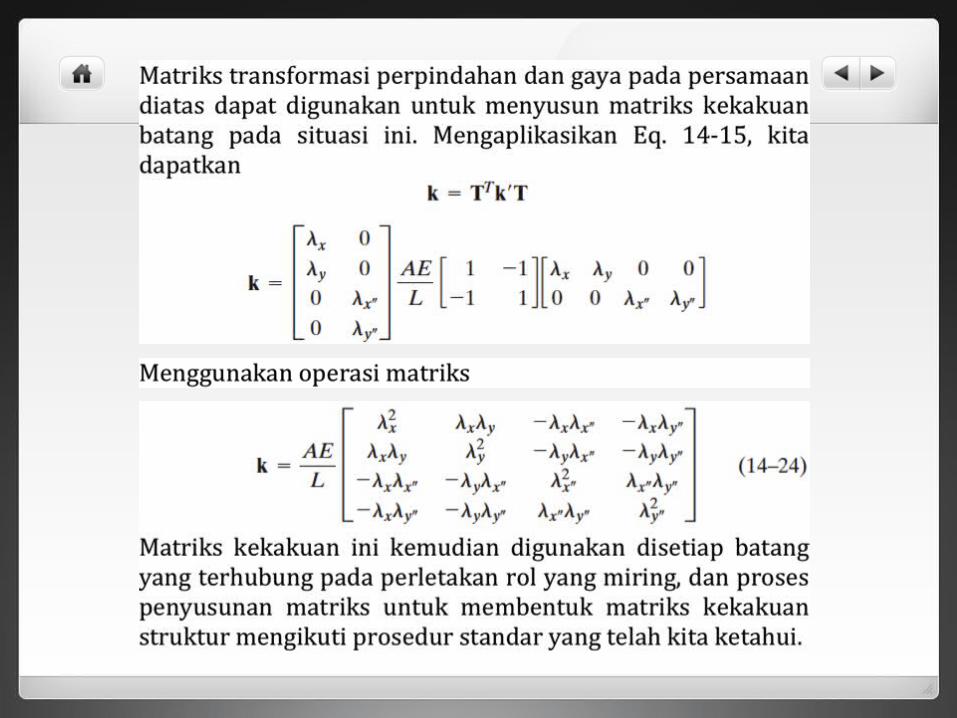
Perpindahan dan Matriks Transformasi Gaya
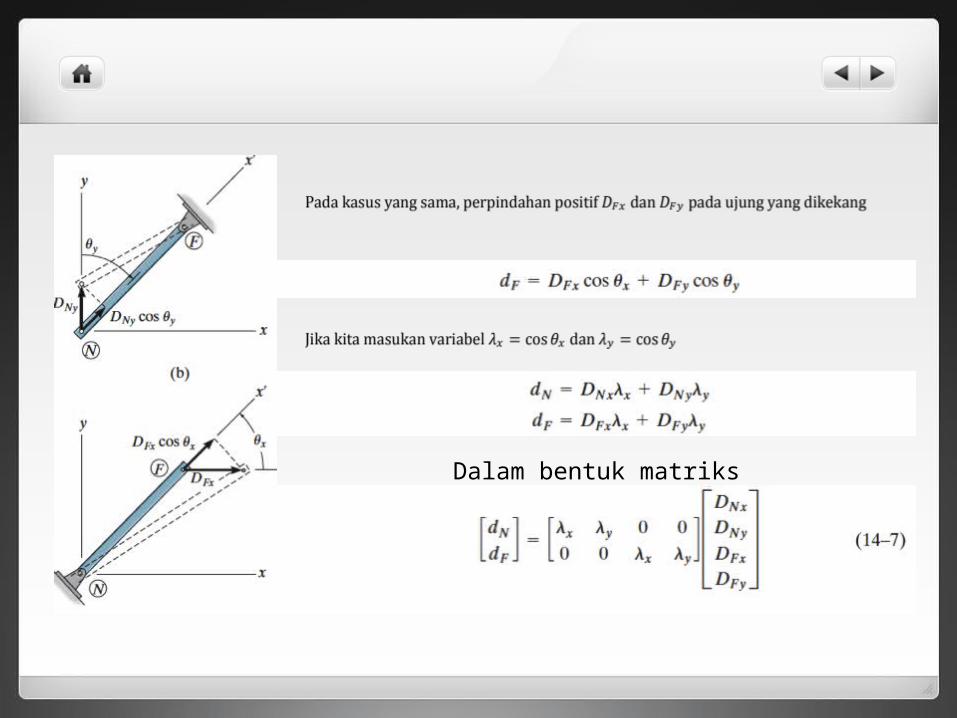
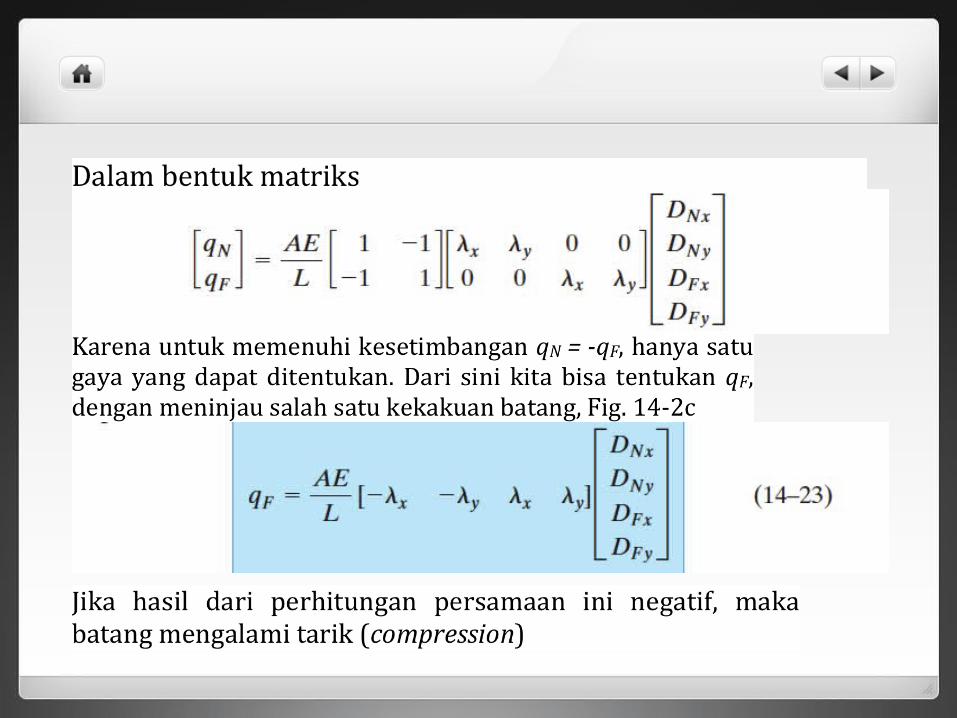
Dalam bentuk matriks
Member Global Stiffness Matrix
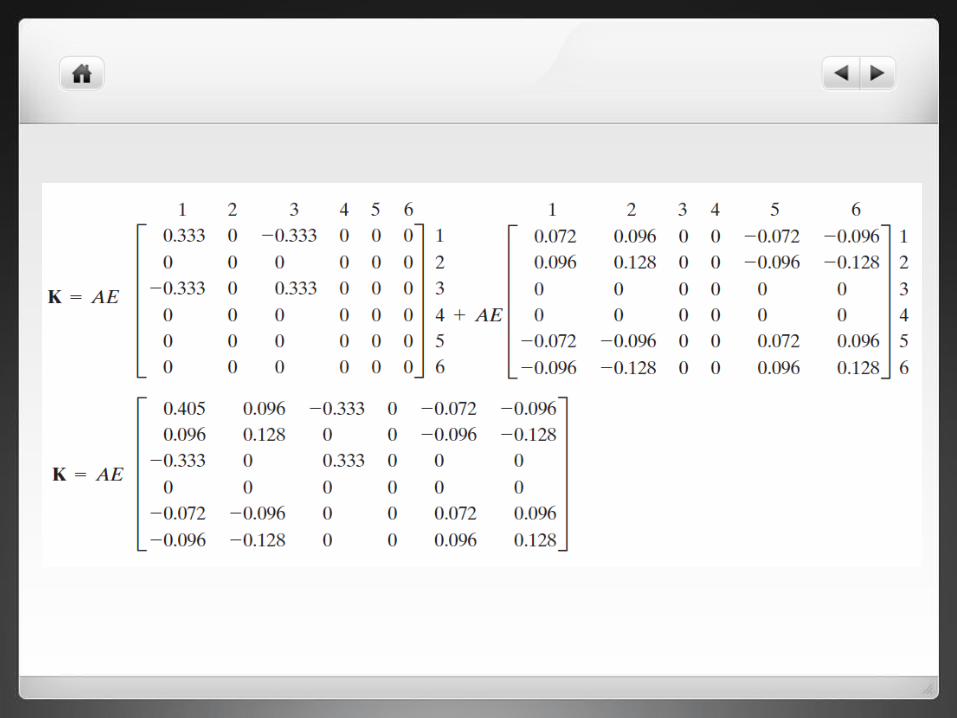
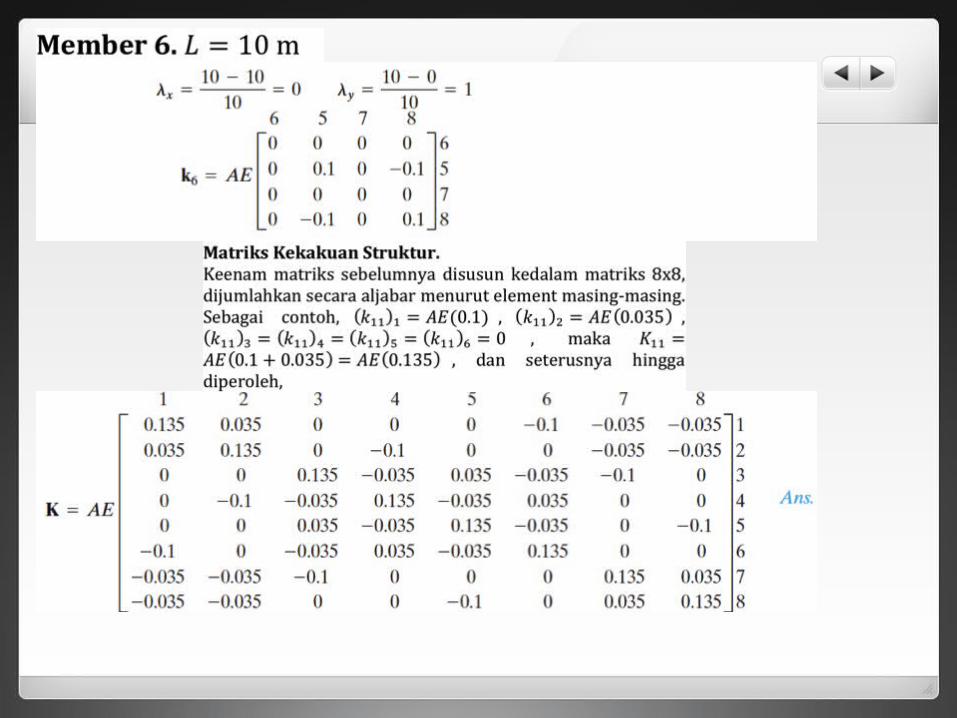
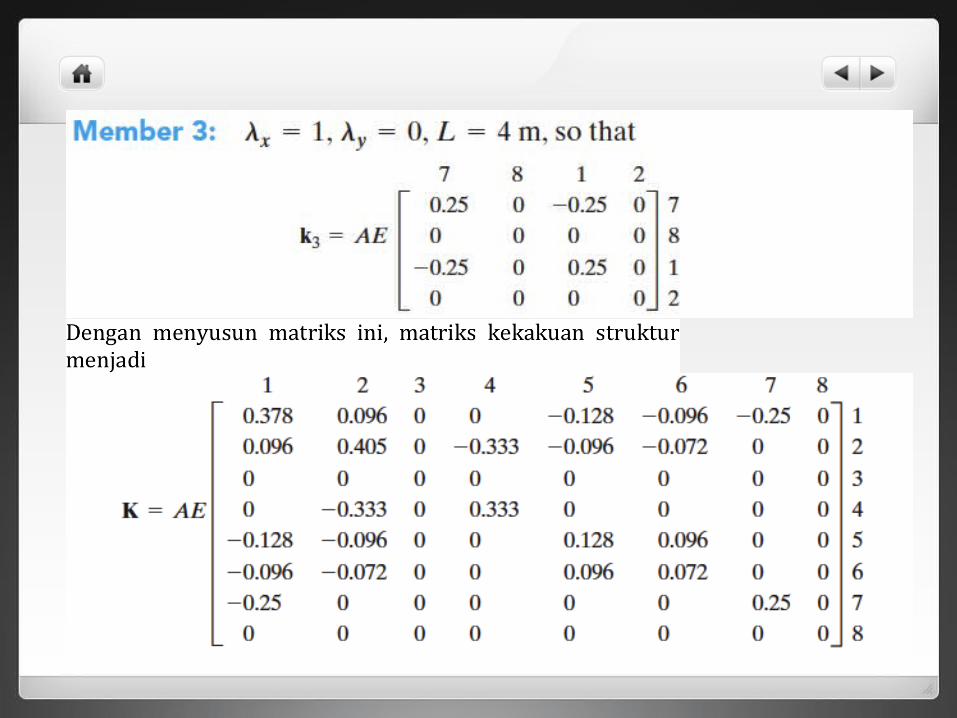
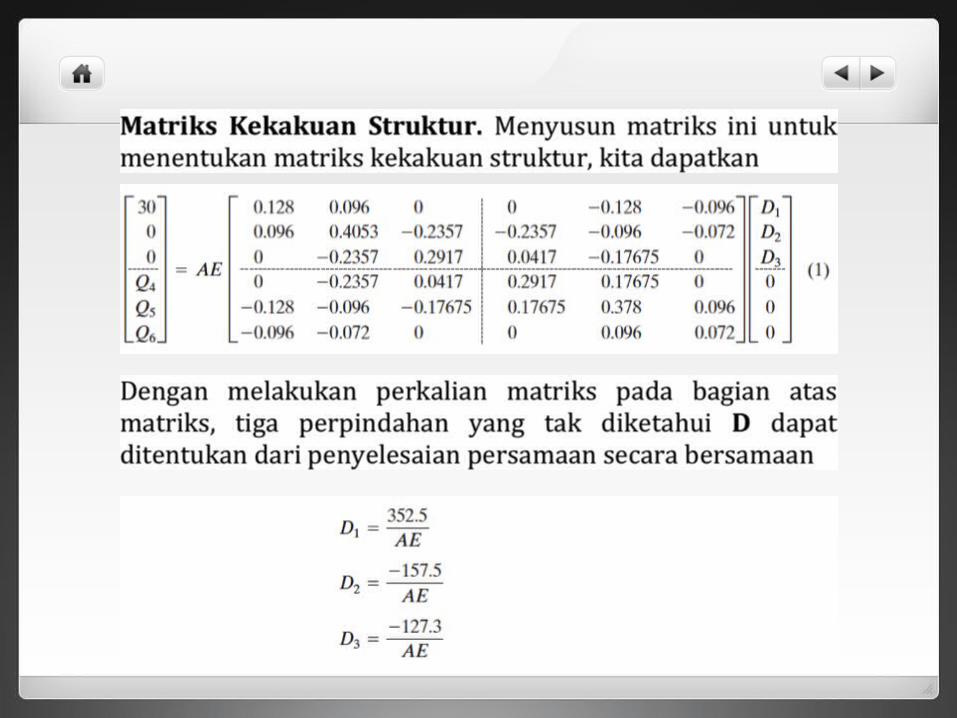
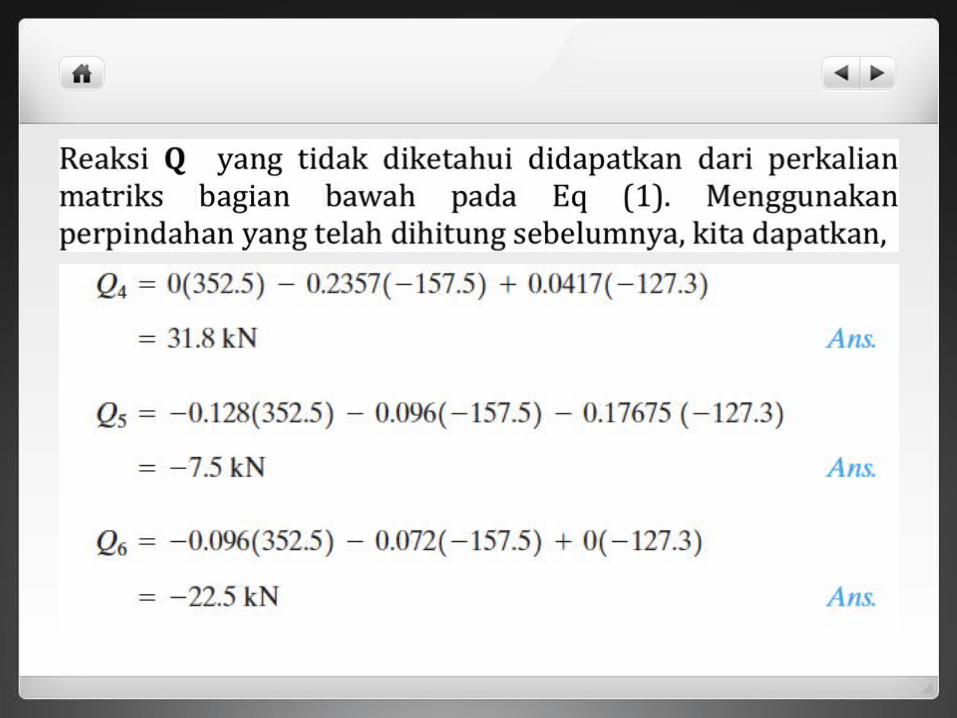
Truss Stiffness Matrix
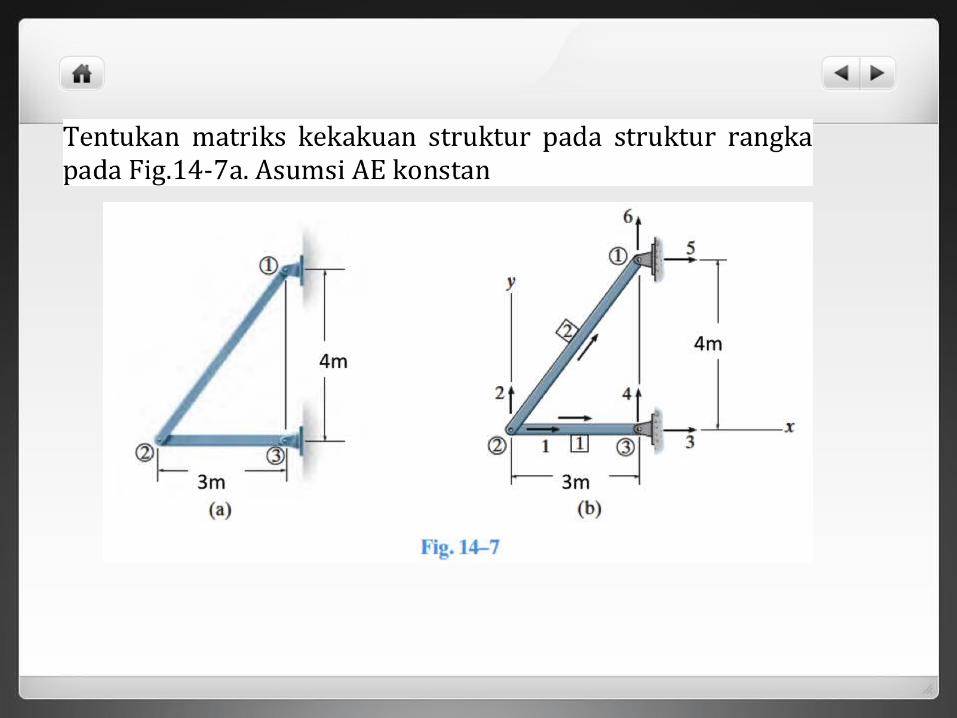
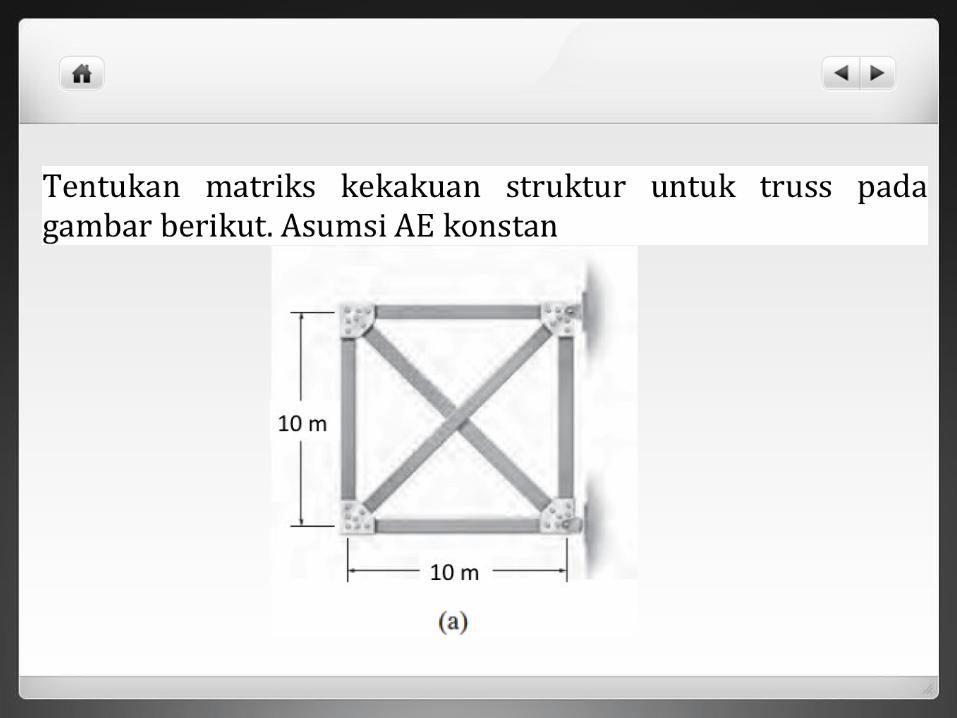
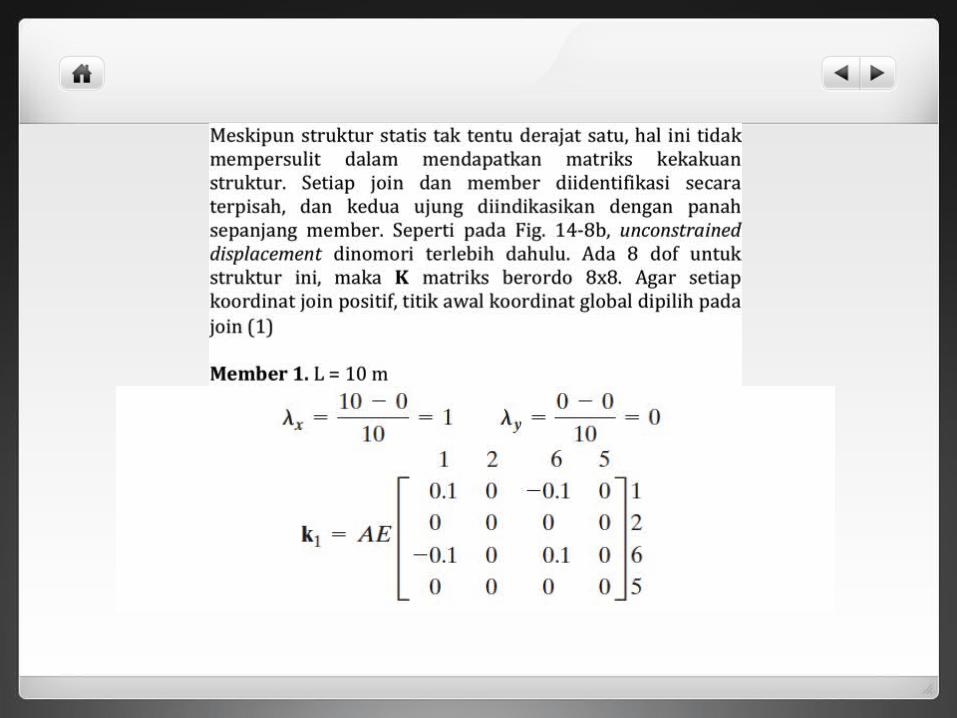

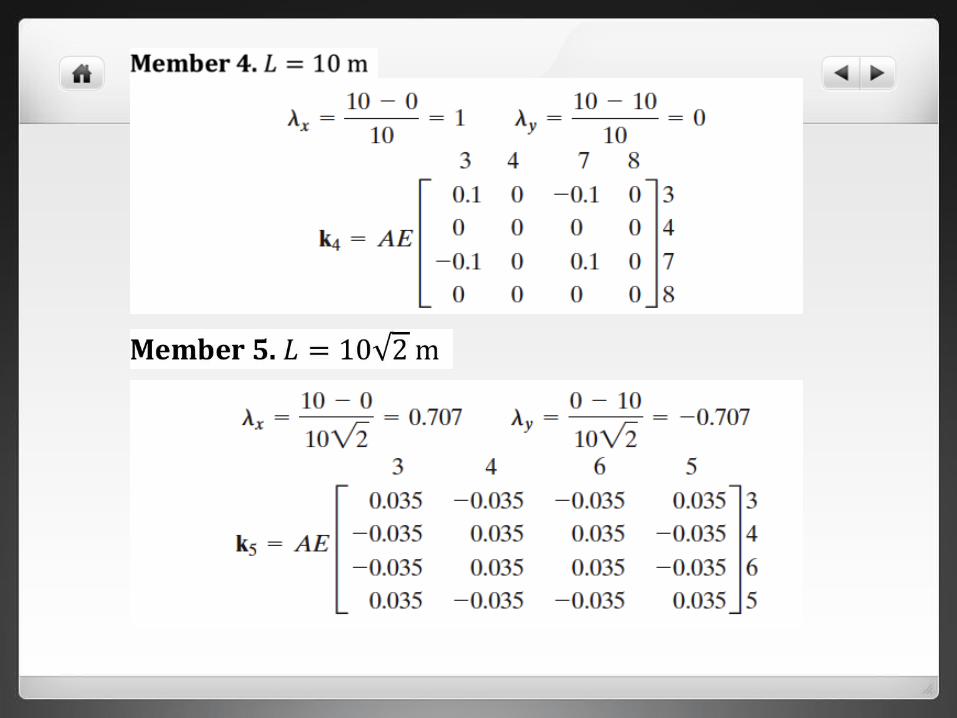
Application of the Stiffness Method For Truss Analysis
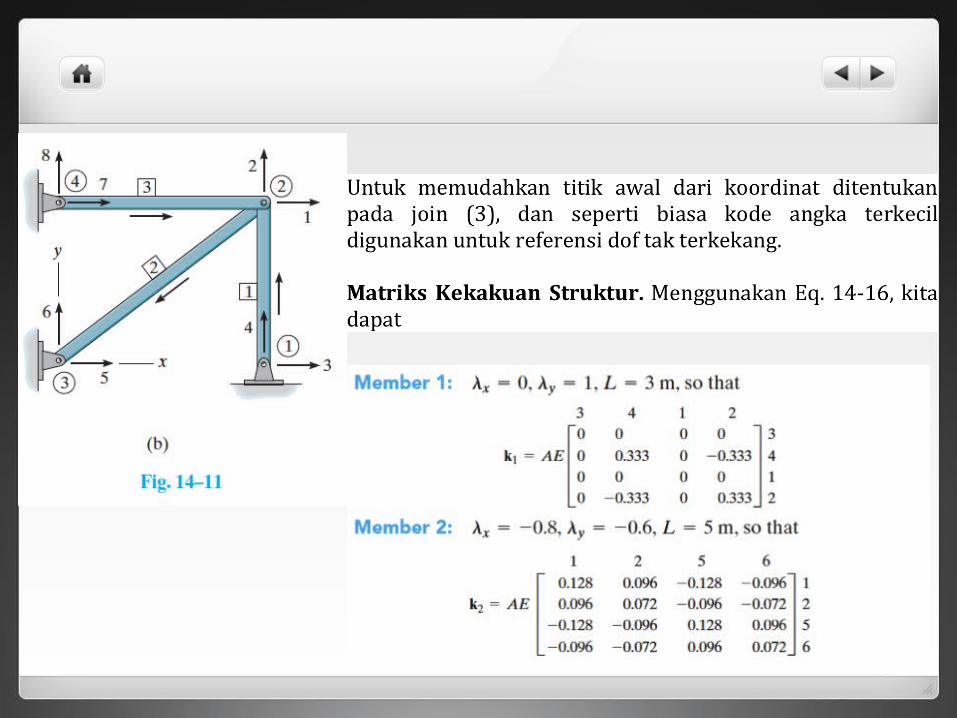
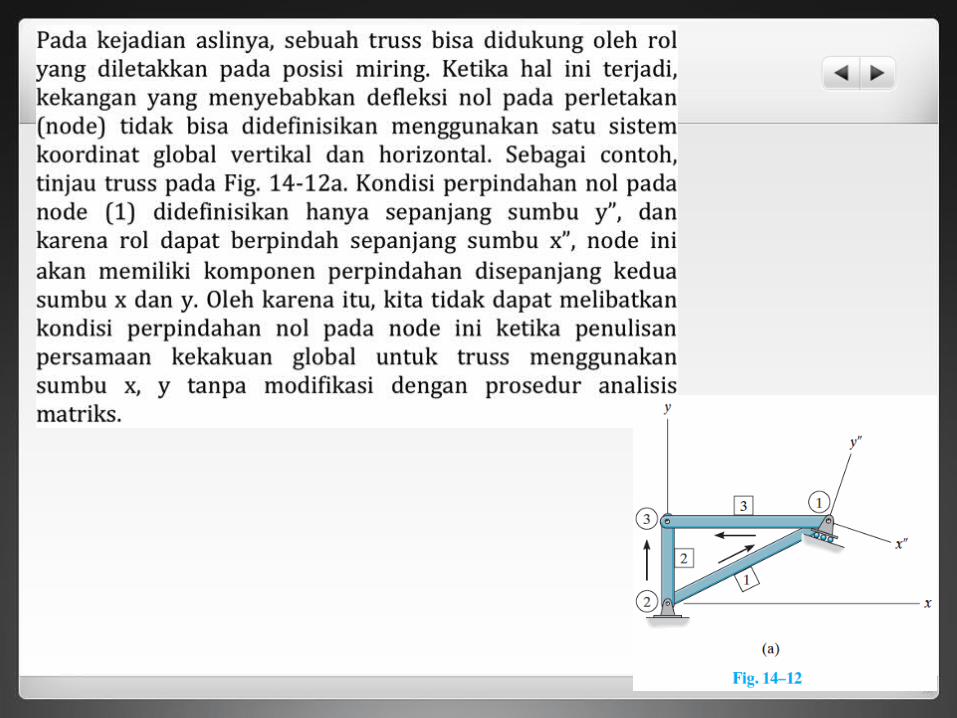
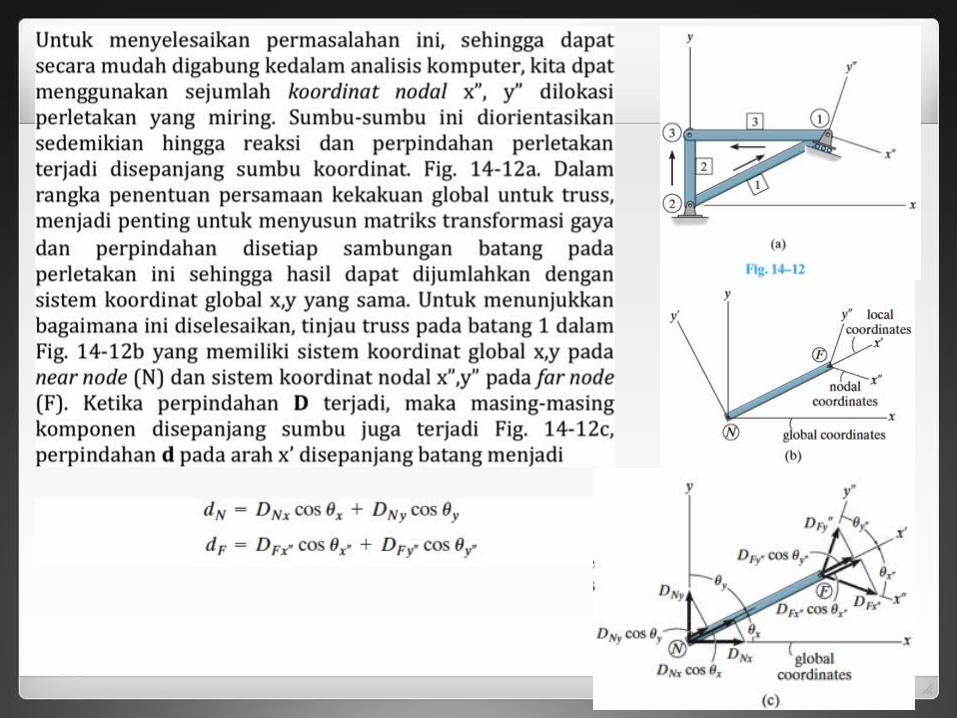
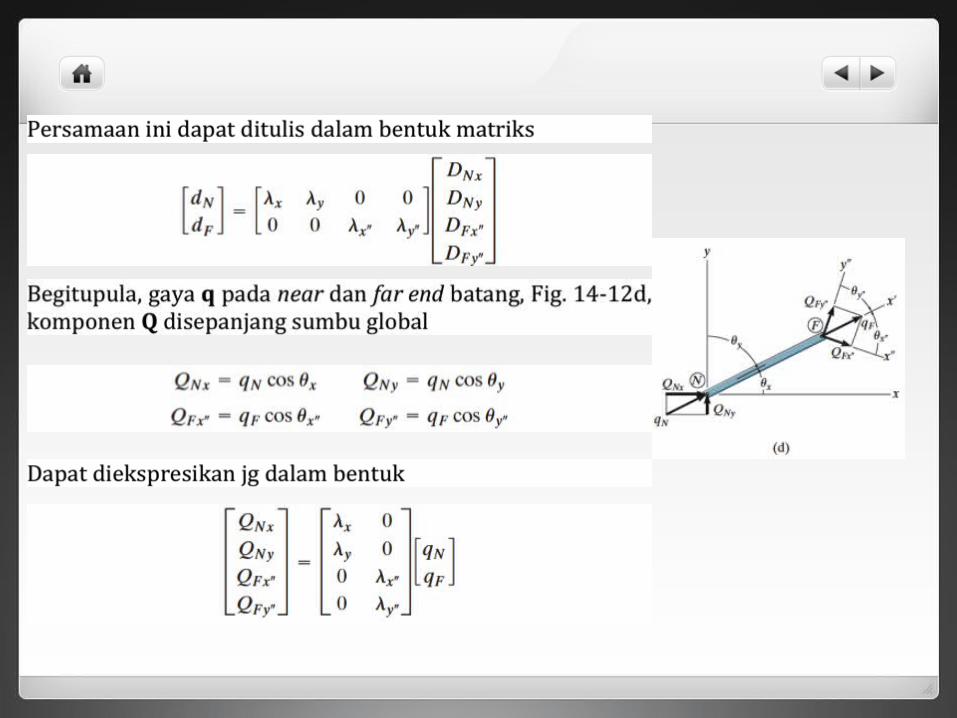
Nodal Coordinates
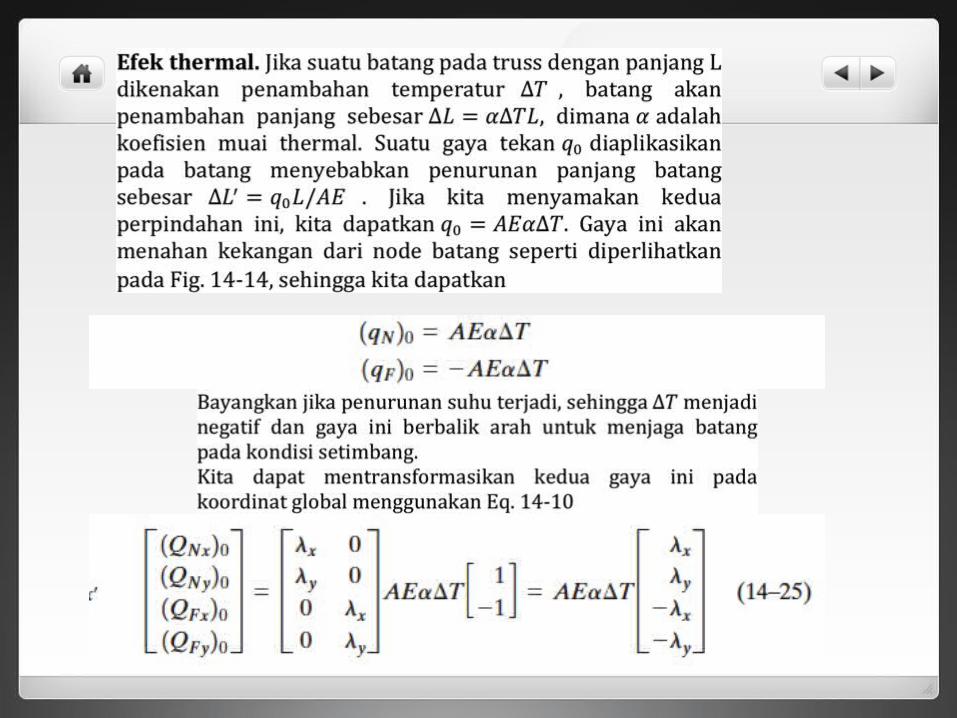
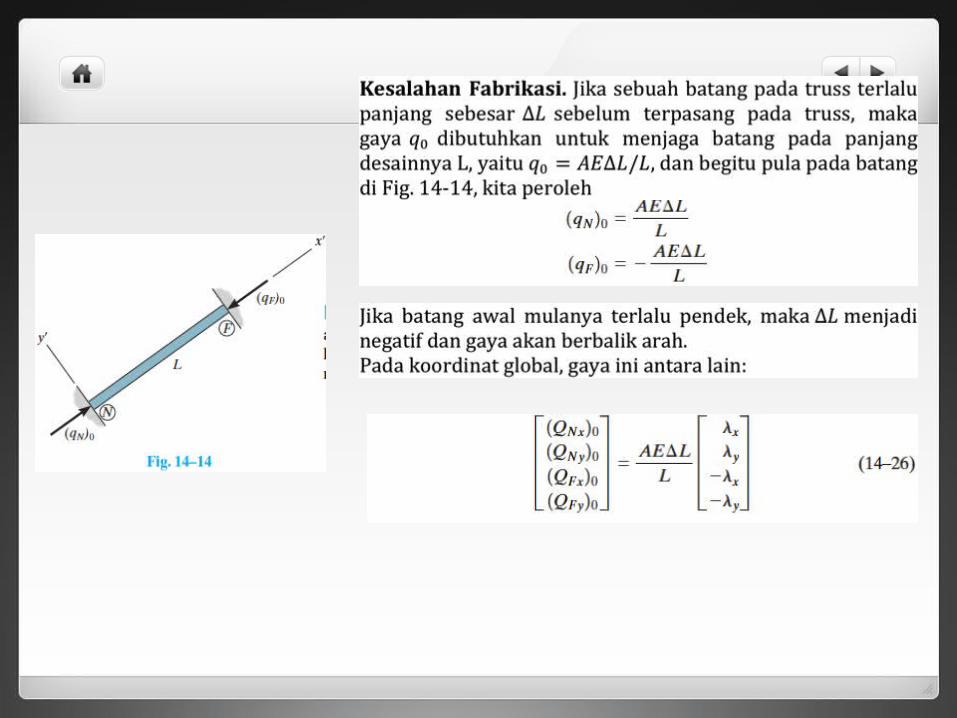
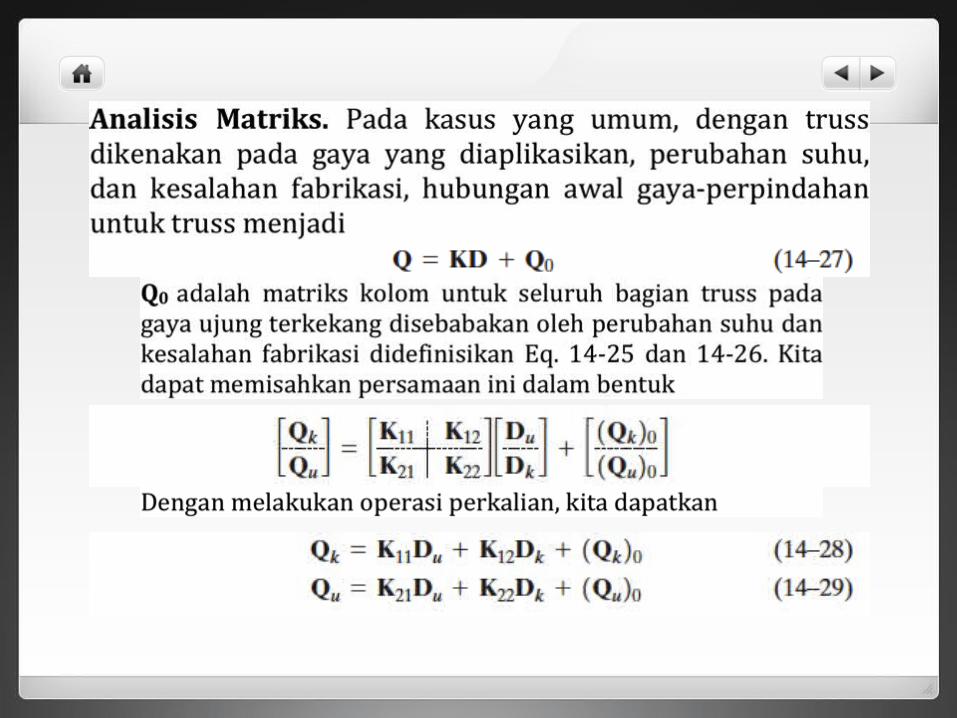
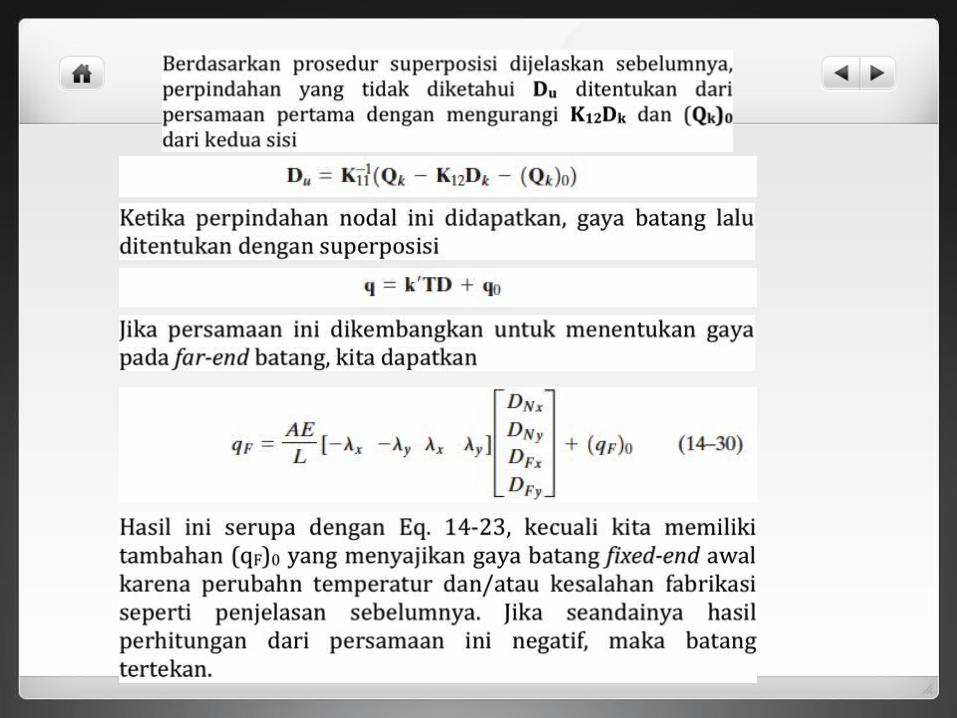
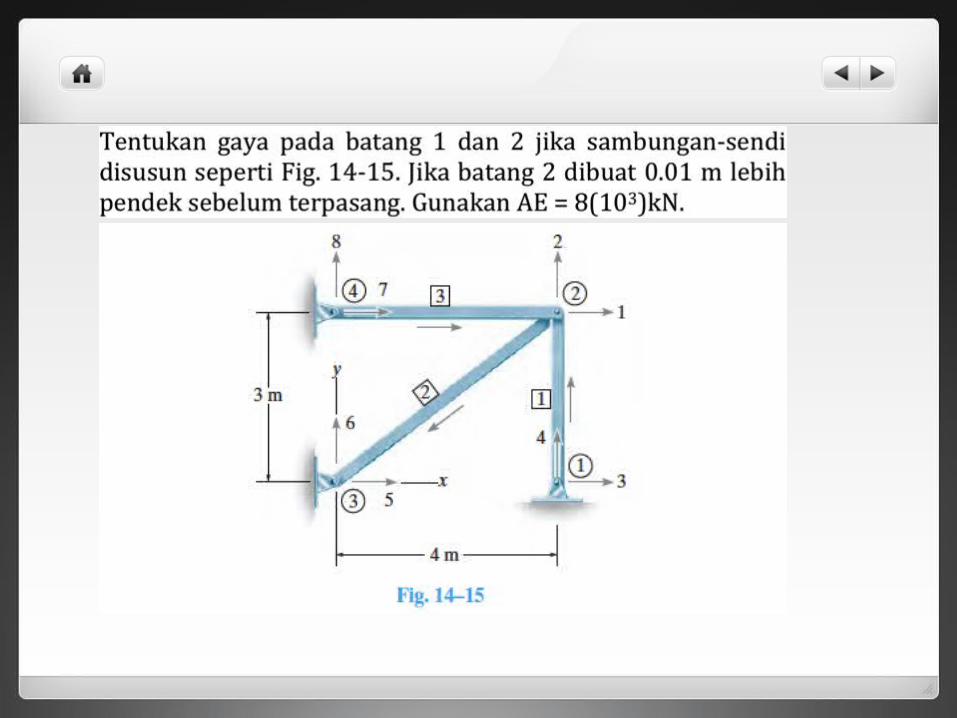
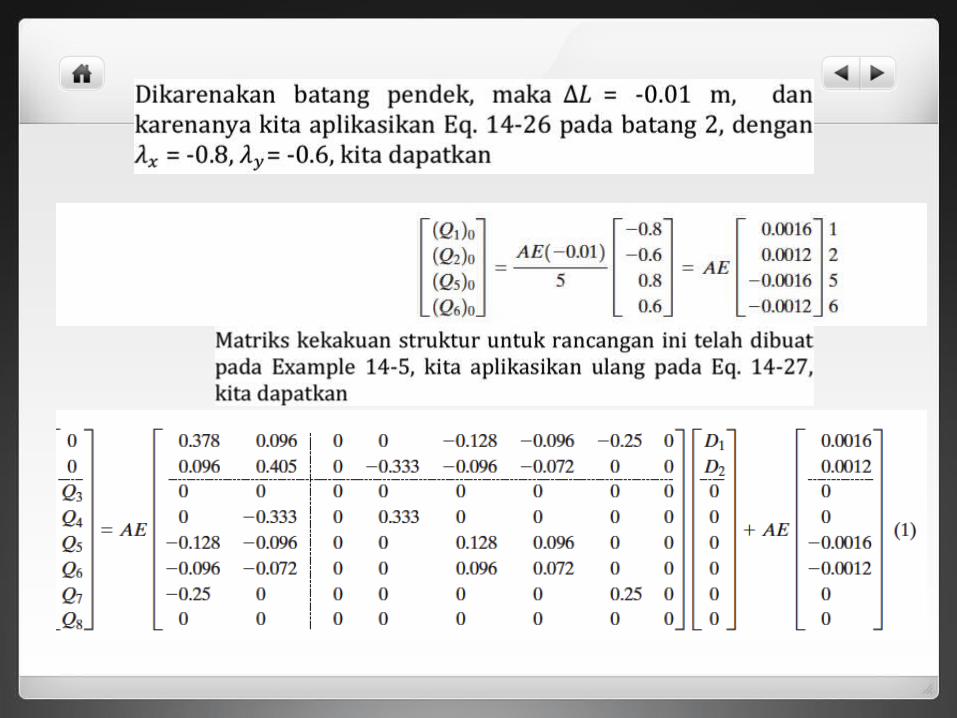
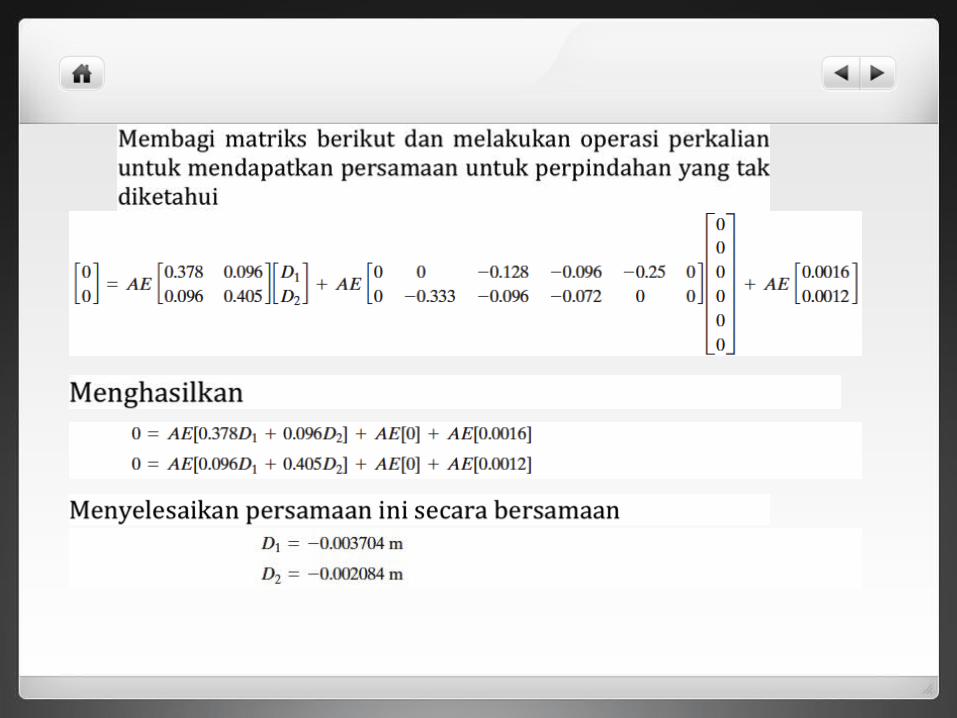
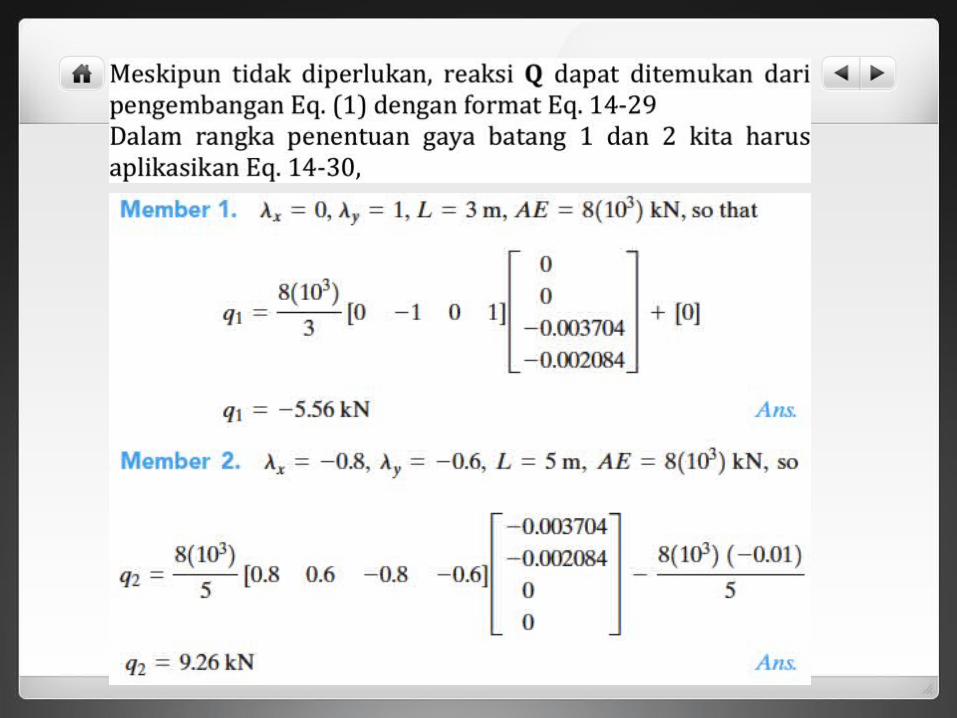
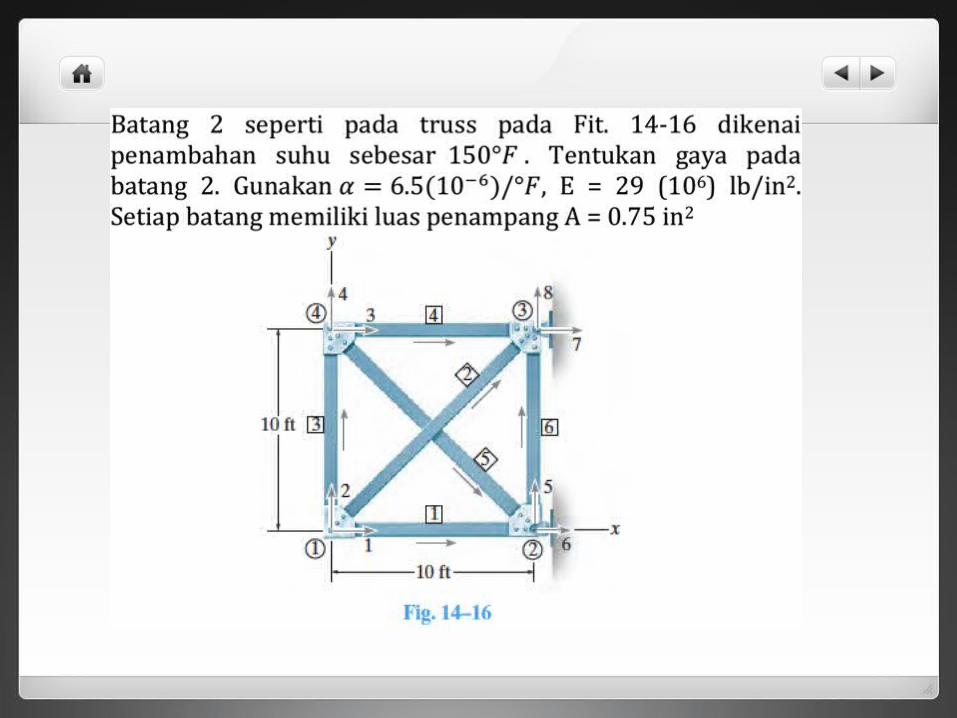
Trusses Having Thermal Changes and Fabrication Errors
Space-Truss Analysis
Recommended

















