Tomorrow: Uplink Video Transmission
Today: Downlink Video Broadcast
Changing Landscape of Multimedia Applications

• Motion-Compensated Predictive Coding (MPEG/H.26)– High compression efficiency– Rigid complexity partition between encoder (heavy) & decoder (light) – High fragility to transmission losses
• Image Coding (Motion JPEG)– Low complexity– High robustness to transmission losses– Low compression efficiency
+
Previous
frame
Current fr
ame
DFD (Displaced Frame Difference)
Motion se
arch
range
Mot
ion
Vec
tor
Contemporary Video Coding Standards

Challenges:• Low bandwidths high compression efficiency • Limited handheld battery power low end-device complexity• Lossy wireless medium robustness to transmission losses
Rethinking Video Over Wireless
• High compression efficiency
• Flexible partition of complexity between encoder & decoder
• Inbuilt robustness to channel loss
• Backward compatibility with existing video standards
Puri & Ramchandran, Allerton ’02
Light PRISMUplink Encoder
Light PRISMDownlink Decoder
Heavy PRISM Downlink Encoder
Heavy PRISM Uplink Decoder
Trans-coding Proxy
New Architecture: PRISM(Power-efficient, Robust, hIgh-compression Syndrome-based Multimedia coding)

DecoderEncoderX
Y
X̂ • X and Y are correlated sources
• Y is available only at decoder
Source Coding with side-information (Slepian–Wolf, Wyner-Ziv)
• Exploit side-information Y at the decoder while encoding X
• No MSE performance loss over case when Y is available at both encoder and decoder when innovations is Gaussian
• For the video coding case, X is the block to be coded and the side-information Y consists of the previously decoded blocks in the frame memory
Background: Distributed Source Coding
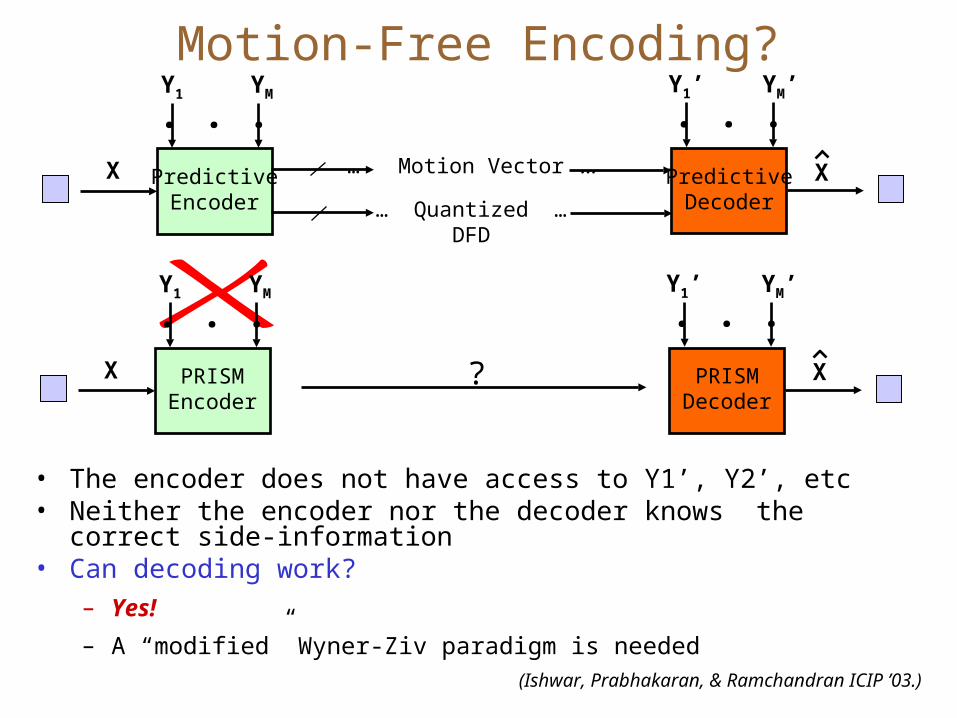
• The encoder does not have access to Y1’, Y2’, etc• Neither the encoder nor the decoder knows the correct side-
information• Can decoding work?
– Yes!
– A “modified” Wyner-Ziv paradigm is needed(Ishwar, Prabhakaran, & Ramchandran ICIP ’03.)
PredictiveDecoder
PredictiveEncoder … Quantized …
DFD
X
. . .Y1 YM
. . .Y1’ YM’
… Motion Vector … X
PRISMDecoder
PRISMEncoder
X
. . .Y1 YM
. . .Y1’ YM’
X?
Motion-Free Encoding?

X Wyner-ZivEncoder
bin index
Y1’
Wyner-ZivDecoder
X
YT’
Wyner-ZivDecoder
. . .
YM’
Wyner-ZivDecoder
. . .
Decoding failure
Decoding failure
PRISM
Robustness Comparisons:
• Predictive Coding: channel errors lead to prediction mismatch and drift
• PRISM: drift stopped if syndrome code is “strong enough”:
Targeted noise ≥ Correlation Noise + Induced Channel Noise + Quant. Noise
• Need concept of “motion compensation at decoder”!
• Need mechanism to detect decoding failure
• In theory: joint typicality (statistical consistency)
• In practice: use CRC

• Secondary description of video sent over auxiliary-channel.
• Need to find statistics of correlation noise Z = X – Xmain.– Can leverage algorithm of Zhang, Regunathan and Rose (Asilomar ’99) to
develop recursive correlation estimation algorithm.(Wang, Majumdar, Ramchandran, and Garudadri: PCS ’04.)
• Auxiliary channel allows drift correction without intra-refresh.
Standards-Compliant Auxiliary-Channel
MPEG/H.26x Encoder
X
Auxiliary-Channel Encoder
MPEG/H.26X Decoder
Auxiliary-Channel Decoder
Xmain
Final reconstruction
Coset Index Wireless
Channel
Auxiliary-Channel
X̂
MPEG/H.26x
bit-stream
Wireless Channel

Results• Channel simulator provided by Qualcomm Inc. conforming to a CDMA 2000 1x
standard.
• Performance comparison among 3 systems:
– H.263+ bitstream with 20% extra rate for FEC (RS codes)
– H.263+ bitstream with 20% extra rate for standard-compliant auxiliary channel
– PRISM
• Standard-compliant auxiliary channel version outperforms H.263+FEC by 2.5-4 dB between error rates of 2-10%.
• PRISM outperforms H.263+FEC by 6-8 dB between error rates of 2-10%.
H.263+ with FEC
Stefan, 352x240, 15fps, 2200 kbps, 8% error rate
H.263+ with Auxiliary Channel PRISM

PRISM for Wireless Video Broadcast
• Broadcast source coding studied in information theory literature.(Heegard & Berger, IT’85, Steinberg & Merhav IT’04)
• Lossy channel: need broadcast source-channel coding view.– Can use PRISM constructions. (Majumdar & Ramchandran, ICIP ’04)
• No need to deterministically track Yb and Yg at encoder.
• No need for multiple prediction loops complexity savings.• Multiple side-informations at each decoder motion search at each decoder.
– Standards-compliant implementations possibly using the auxiliary channel setup.
(Wang, Majumdar, & Ramchandran, ICASSP ’05)
Decoder Bad
Decoder GoodEncoderX
Yg (“good” side-information)
Yb (“bad” side-information)
Xg
Xb
Rate = ∆R
Rate = R
Recommended











![1 Downlink and Uplink Cell Association with …arXiv:1601.05281v1 [cs.IT] 20 Jan 2016 1 Downlink and Uplink Cell Association with Traditional Macrocells and Millimeter Wave Small Cells](https://img.dokumen.tips/doc/110x75/5e95bd0c0c147f2995470045/1-downlink-and-uplink-cell-association-with-arxiv160105281v1-csit-20-jan-2016.jpg)





