SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Seminário de Discussões TécnicasCar Pursuit Problem under Measurement Packet Loss
Leonardo de Paula Carvalho[Estudante de Mestrado | Professor Alim Pedro de Castro Gonçalves]
Advanced Computing, Control & Embedded Systems LaboratoryUniversidade Estadual de Campinas - UNICAMP
15/Outubro/2015

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Tópicos
1 Motivação2 Objetivo da Pesquisa3 Métodos Empregados
Modelo do CarroModelo da RedeMLJSNorma H∞ MarkovianaControlador Dinâmico de SaídaTopologiaSistemas Estendido
4 ResultadosDesvio PadrãoErro Quadrático
5 Conclusão6 Próximos Passos7 Perguntas & Respostas8 Referências

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Motivação
1 Teste de esforço de carros
2 Estradas Inteligentes

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Objetivo
1 Objetivo Geral: Gerar uma estrategia para o controle decomboio de carros com intercomunicação feita por canaisreais(não ideais).
2 Objetivo Especifico: Fazer estudo dos diferentes tipos detopologia
3 Objetivo Especifico: Obter o modelos viáveis do veiculo eda rede.
4 Objetivo Especifico: Fazer comparação com as técnicasclássicas.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Modelo do Carro
Entre vários modelos presentes na literatura o modelo"bicicleta"foi escolhido para o nosso estudo, a figura a baixo éuma representação do mesmo,

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Modelo Cinemático do Carro
O modelo cinemático do carro é mostrado a seguir,xyθ
δ
=
cos(θ)sin(θ)tan(δ)
L0
v +
0001
δ, (1)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Modelo Cinemático do Carro
O modelo na forma espaço de estado do carro é mostrado aseguir,[
vy
r
]=
[− (cr+cf )
mvx
(cr+cf )mvx
− vx(lrcr−lf cf )
Jvvx− l2r cr+l2f cf
Jvvx
] [vy
r
]+
[ cf
mlf cf
m
]δ (2)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Modelo da Rede
Para a modelagem da rede utilizamos o modelo Gilbert.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
MLJS
Um sistema linear sujeito a saltos Markovianos é definido daseguinte maneira,
G :
x(k + 1) = A(θk)x(k) + B(θk)u(k) + J(θk)w(k),
y(k) = Cy(θk)x(k) + Ey(θk)w(k),
z(k) = Cz(θk)x(k) + D(θk)u(k) + Ez(θk)w(k),
(3)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Norma H∞ Markoviana
A norma H∞ Markoviana pode ser definida da seguinte forma,
‖G‖2∞ = sup
0 6=w∈L2, θ0∈K
‖z‖22
‖w‖22
(4)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Controlador Dinâmico de Saída
O controlador linear de ordem completa dependente do mode esujeito a saltos markovianos pode ser definido da seguintemaneira,
C :
{xc(k + 1) = Ac(θk)xc(k) + Bc(θk)y(k)
u(k) = Cc(θk)xc(k) + Dc(θk)y(k), (5)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Teorema para obtenção do controlador
TheoremTeorema: Existe um controlador dinâmico linear porrealimentação de saída na forma 5 tal que ‖Gf ‖2
∞ < γ se esomente se existirem matrizes simétricas Xi,Zi, ondeXpi =
∑j∈K pijXj, i ∈ K e Zpi =
∑j∈K pijZj, i ∈ K, e matrizes
Mi,Li,Fi,Ki,Hi com dimensões compatíveis que satisfaçam asLMIs,
Yi • •I Xi •0 0 γI
Π′i(Zi,Xi,Mi,Fi,Ki,Li)
Πi(Zi,Xi,Mi,Fi,Ki,Li)
Hi + H′i − Zpi • •I Xpi •0 0 I
> 0, (6)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Teorema para Obtenção do Controlador
TheoremA matriz Πi é definida como:
Πi = AiYi + BiLi Ai + BiKiCyi Ji + BiKiEyi
Mi XpiAi + FiCyi XpiJi + FiEyi
CziYi + DziLi Czi + DziKiCyi Ezi + DziKiEyi
(7)
[Zij •Hi Yj
]> 0 (8)
sejam satisfeitas 6 e 8 a solução é dada por Ui = Y−1 − Xi andVi = Yi ∀ i ∈ K. Prova:Consulte [6].

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Teorema para Obtenção do Controlador
Caso o Teorema seja satisfeito as matrizes do controlador [5]pode ser obtido da seguinte forma,[
Aci Bci
Cci Dci
]=
[Upi XpiBi
0 I
]−1 [Mi − XpiAiYi Fi
Li Ki
] [V ′i 0
CyiYi I
]−1
(9)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Topologia
O posicionamento dos controladores e atuadores em relação arede são os seguintes,

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Topologia
O diagrama abaixo é uma representação gráfica do problema,

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Sistemas Estendido
A solução proposta consiste em projetar um controlador dedinâmico de saída de ordem completa para o seguinte sistemaestendido,
x(k + 1) =
[Ad 00 Ad
]x(k) +
[0
Bd
]u2(k) +
[Bd 0 00 edBd 0
]ω(k) (10)
z(k) =
1 0 −1 00 1 0 −10 0 0 0
x(k) +
00en
u2(k) (11)
· · ·

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Sistemas estendido
Ambos Zero e Hold foram testados, a seguir temos as equaçõespara a abordagem Zero,
y(k) =
I 0
0 I
x(k) +
0 I 0
0 0 enI
w(k), if θ(k) = sucesss,
0 0
0 I
x(k) +
0 0 0
0 0 enI
w(k), if θ(k) = failure
(12)

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Resultados
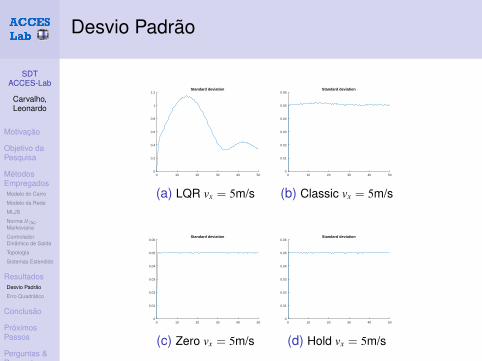
Utilizamos os controladores que normalmente são utilizados paraesse tipo de problema o Linear Quadratic Regulator, controladorH∞ clássico e fizemos a comparação com os controladoresdinâmicos de ordem completa, o sinal de entrada no primeirocarro utilizado foi uma senoide, que tem valores de amplitude efrequência que respeitam os parâmetros físicos da planta. Oresultados podem ser vistos no gráfico apresentados nospróximos slides. Plotamos o desvio padrão e o erro quadráticopara a situação onde a velocidade em x é vx = 5m/s.
SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Desvio Padrão
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
1.2Standard deviation
(a) LQR vx = 5m/s
0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06Standard deviation
(b) Classic vx = 5m/s
0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06Standard deviation
(c) Zero vx = 5m/s
0 10 20 30 40 500
0.01
0.02
0.03
0.04
0.05
0.06Standard deviation
(d) Hold vx = 5m/s

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Erro Quadrático
time0 10 20 30 40 50
0
0.2
0.4
0.6
0.8
1
1.2
1.4Mean square error
(e) LQR vx = 5m/stime
0 10 20 30 40 500
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04Mean square error
(f) Classic vx = 5m/s
time0 10 20 30 40 50
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04Mean square error
(g) Zero vx = 5m/stime
0 10 20 30 40 500
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04Mean square error
(h) Hold vx = 5m/s

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Conclusão
Com os resultados preliminares é possível observar que asolução proposta é adequada para o problema em questão,entretanto ainda existem varias técnicas que podem aprimorar odesempenho do controlador e tornar as simulações maispróximas da realidade, como o a adição de incertezas nas LMIsque calculam o controlador. Apesar dos resultados seremfavoráveis é necessário validar esses resultados em umaplataforma de simulação que garanta uma maior veracidade aostestes.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Próximos Passos
1 Adicionar incertezas ao modelo.
2 Adicionar delay ao projeto do controlador.
3 Fazer as simulações no gazebo.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Perguntas e Respostas
????????????????????????????

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Referências Bibliográficas I
O. Garcia, J. Ferreira, and A. Miranda Neto, “Design and simulation for pathtracking control of a commercial vehicle using mpc,” in Robotics: SBR-LARSRobotics Symposium and Robocontrol (SBR LARS Robocontrol), 2014 JointConference on, pp. 61–66, IEEE, 2014.
O. G. Bedoya, J. V. Ferreira, and A. de Miranda Neto, “Dynamic model of acommercial vehicle for steering control and state estimation,”
B. Avak, “Modeling and control of a superimposed steering system,” 2004.
A. R. Fioravanti, A. P. Gonçalves, and J. C. Geromel, “Filter inputs withmarkovian lossy links: Zero or hold?,” in Control and Automation (ICCA),2011 9th IEEE International Conference on, pp. 656–661, IEEE, 2011.
P. Seiler and R. Sengupta, “An hoo approach to networked control,”Automatic Control, IEEE Transactions on, vol. 50, no. 3, pp. 356–364, 2005.
J. C. Geromel, A. P. Gonçalves, and A. R. Fioravanti, “Dynamic outputfeedback control of discrete-time markov jump linear systems through linearmatrix inequalities,” SIAM Journal on Control and Optimization, vol. 48, no. 2,pp. 573–593, 2009.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Referências Bibliográficas II
A. Fioravanti, J. Geromel, et al., “Dynamic output feedback hoo control ofdiscrete-time markov jump linear systems through linear matrix inequalities,”in Decision and Control, 2008. CDC 2008. 47th IEEE Conference on,pp. 4787–4792, IEEE, 2008.
J.-P. Ebert, A. Willig, et al., “A gilbert-elliot bit error model and the efficientuse in packet level simulation,” 1999.
A. P. Gonçalves, A. R. Fioravanti, and J. C. Geromel, “Markov jump linearsystems and filtering through network transmitted measurements,” SignalProcessing, vol. 90, no. 10, pp. 2842–2850, 2010.
M. Brackstone and M. McDonald, “Car-following: a historical review,”Transportation Research Part F: Traffic Psychology and Behaviour, vol. 2,no. 4, pp. 181–196, 1999.
G. Baffet, A. Charara, and D. Lechner, “Estimation of vehicle sideslip, tireforce and wheel cornering stiffness,” Control Engineering Practice, vol. 17,no. 11, pp. 1255–1264, 2009.
T. Chung and K. Yi, “Design and evaluation of side slip angle-based vehiclestability control scheme on a virtual test track,” Control Systems Technology,IEEE Transactions on, vol. 14, no. 2, pp. 224–234, 2006.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Referências Bibliográficas III
L. Schenato, “To zero or to hold control inputs with lossy links?,” AutomaticControl, IEEE Transactions on, vol. 54, no. 5, pp. 1093–1099, 2009.
N. H. T. S. Administration et al., “National motor vehicle crash causationsurvey report to congress,” National Highway Traffic Safety AdministrationTechnical Report DOT HS, vol. 811, p. 059, 2008.
A. F. S. I. R. Travel, “Annual global road crash statistics.”http://asirt.org/initiatives/informing-road-users/road-safety-facts/road-crash-statistics, 1987."[Online; accessed 16-September-2015]".
J. C. Geromel and R. Korogui, “Controle linear de sistemas dinâmicos,”Editora Blucher, São Paulo, SP, 2011.
J. M. Snider, “Automatic steering methods for autonomous automobile pathtracking,” Robotics Institute, Pittsburgh, PA, Tech. Rep. CMU-RITR-09-08,2009.
K. Zhou, J. C. Doyle, K. Glover, et al., Robust and optimal control, vol. 40.Prentice hall New Jersey, 1996.
D. S. Naidu, Optimal control systems.CRC press, 2002.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Referências Bibliográficas IV
A. Leon-Garcia, “Probability and random processes,” Addison Wesley, Table,vol. 3, pp. 126–127, 1989.
M. Buehler, K. Iagnemma, and S. Singh, The DARPA Urban Challenge:Autonomous vehicles in city traffic, vol. 56.springer, 2009.
O. L. V. Costa, M. D. Fragoso, and R. P. Marques, Discrete-time Markov jumplinear systems.Springer Science & Business Media, 2006.

SDTACCES-Lab
Carvalho,Leonardo
Motivação
Objetivo daPesquisa
MétodosEmpregadosModelo do Carro
Modelo da Rede
MLJS
Norma H∞Markoviana
ControladorDinâmico de Saída
Topologia
Sistemas Estendido
ResultadosDesvio Padrão
Erro Quadrático
Conclusão
PróximosPassos
Perguntas &Respostas
Referências
Seminário de Discussão Técnica
http://www.fem.unicamp.br/~acceslab
Recommended