Embed Size (px)
Citation preview

Capıtulo 1
Topologıa inicial
1.1 Topologıa producto
En el tema 1 se construyo dos formas de tener nuevos espacios topologicos a partirde otros dados. Ası, se definio de forma natural una estructura topologica en lossubconjuntos de un espacio topologico, y que se denomino subespacio topologico.Por otro lado, en los ejercicios del mismo capıtulo se doto de una topologıa a unconjunto que era biyectivo con un espacio topologico. En este capıtulo se introducela construccion de nuevos espacios topologicos a partir del producto cartesiano deellos. Concretamente, dados dos espacios topologicos (X1, τ1) y (X2, τ2), es naturalpreguntarse si es posible construir en el producto cartesiano X1×X2 una topologıarelacionada con τ1 y τ2. Para la construccion del producto topologico, se analizanalgunos aspectos que tendrıa que satisfacer dicho espacio:
1. Se puede pensar en el plano euclıdeo R2 = R×R como producto cartesiano dela recta real R con su topologıa usual. Es de esperar que la topologıa productoque se construya en R2 coincida con la topologıa usual.
2. Supongase que X1 y X2 son dos espacios topologicos y se considera las aplica-ciones proyecciones pi : X1 ×X2 → Xi, i = 1, 2, definidas por pi(x1, x2) = xi,i = 1, 2. La topologıa producto tendrıa que hacer continuas a estas apli-caciones. Por otra parte, el estudio de la continuidad de una aplicacionf : Y → X1 × X2 tendrıa que ser equivalente a la continuidad de sus apli-caciones coordenadas f = (f1, f2), con fi = pi ◦ f , i = 1, 2.
1

2 CAPITULO 1. TOPOLOGIA INICIAL
3. Se deberıan obtener resultados ”naturales”, como por ejemplo, si X1∼= Y1 y
X2∼= Y2, entonces X1 ×X2
∼= Y1 × Y2
4. Si A y B son dos subconjuntos de dos espacios topologicos X1 y X2 respecti-vamente, en el producto cartesiano A×B habrıa dos topologıas: la topologıaproducto de las topologıas relativas y la topologıa inducida en A × B de latopologıa producto de X1 por X2. Es natural esperar que estas dos topologıascoincidan.
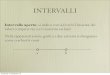
Volviendo al caso R2 = R × R, en un primer momento uno puede pensar que losconjuntos abiertos de R2 en la topologıa producto tienen que ser producto cartesianode conjuntos abiertos de R. Rapidamente se observa que no es una buena tentativa,pues las bolas de R2 (que son conjuntos abiertos) no son producto de abiertos:recuerdese que los conjuntos abiertos de R son uniones de intervalos abiertos, demanera que al hacer productos cartesianos resulta una especie de ”rectangulos”,pero no bolas.
Sin embargo, para cada punto de una bola abierta, sı se puede introducir un”rectangulo” abierto en la bola, es decir, un producto de intervalos (vease figura1.1). Esto da pie a pensar en construir la topologıa producto mediante una basesuya, concretamente, la topologıa que se va a construir en R2 va a tener como basela familia formada por los productos de intervalos abiertos. En el caso general, seprobara primero que el producto de abiertos es base de cierta topologıa y es a estatopologıa a la que se llamara topologıa producto.
x
y
Figura 1.1: Los rectangulos son base de abiertos de R2.
Proposicion 1.1.1 Sean dos espacios topologicos (X1, τ1) y (X2, τ2) y se considerala familia de subconjuntos de X1 ×X2 formada por
τ1 × τ2 = {O1 ×O2; O1 ∈ τ1, O2 ∈ τ2}.

1.1. TOPOLOGIA PRODUCTO 3
Entonces τ1 × τ2 es base de una topologıa en el conjunto X1 ×X2. La topologıa enX1 ×X2 que tiene por base τ1 × τ2 se denomina topologıa producto de τ1 y τ2 y senotara de nuevo por τ1 × τ2.
Demostracion : • La primera propiedad es evidente, pues X1 ×X2 ∈ τ1 × τ2.
• Sean O1×O2 y O′1×O′
2 ∈ τ1× τ2 y (x1, x2) ∈ (O1×O2)∩ (O′1×O′
2). Entoncesel propio conjunto (O1 ×O2) ∩ (O′
1 ×O′2) pertenece a τ1 × τ2, ya que
(O1 ×O2) ∩ (O′1 ×O′
2) = (O1 ∩O′1)× (O2 ∩O′
2).
q.e.d
Se relaciona ahora bases de abiertos y bases de entornos en la topologıa producto.
Proposicion 1.1.2 Sean dos espacios topologicos (X1, τ1) y (X2, τ2).
1. Si bases β1 y β2 son bases de las topologıas τ1 y τ2 respectivamente, entoncesβ1 × β2 es una base de la topologıa τ1 × τ2.
2. Sean x1 ∈ X1, x2 ∈ X2 y U1x1
, U2x2
los respectivos sistemas de entornos. En-tonces U1
x1×U2
x2es base de entornos del punto (x1, x2) en la topologıa τ1× τ2.
3. Sean bases de entornos β1x1
, β2x2
de x1 e x2 respectivamente. Entonces β1x1×β2
x2
es una base de entornos del punto (x1, x2) en la topologıa τ1 × τ2.
Nota. En la segunda propiedad se observa que los entornos en la topologıa productono son resultado del producto de entornos, sino que la familia de los productos deentornos es base de entornos en la topologıa producto. †
Demostracion : 1. Se utiliza la definicion de base. Para probar que β1 × β2 esuna base de τ1 × τ2 primero hay que demostrar que todo elemento de β1 × β2
es un conjunto abierto. Sea B1 × B2 ∈ β1 × β2. Ya que β1 ⊂ τ1 y β2 ⊂ τ2,B1 ×B2 ∈ τ1 × τ2.
Por otra parte, sea un conjunto abierto G en la topologıa producto y (x1, x2) ∈G. Ya que τ1 × τ2 es base de la topologıa producto, existen subconjuntosabiertos O1 y O2 de X1 y X2 respectivamente, tales que
(x1, x2) ∈ O1 ×O2 ⊂ G.

4 CAPITULO 1. TOPOLOGIA INICIAL
Por ser β1 y β2 bases de topologıas, existen B1 ∈ β1 y B2 ∈ β2 tales quex1 ∈ B1 ⊂ O1 y x2 ∈ B2 ⊂ O2. Entonces
(x1, x2) ∈ B1 ×B2 ⊂ O1 ×O2 ⊂ G.
2. Para probar que U1x1× U2
x2es una base de entornos del punto (x1, x2), se usa
la definicion. Primero hay que probar que todos sus elementos son entornos.Sean U1 ∈ U1
x1y U2 ∈ U2
x2. Ya que son entornos de x1 e x2, existen conjuntos
abiertos O1 ∈ τ1, O2 ∈ τ2 tales que
x1 ∈ O1 ⊂ U1, x2 ∈ O2 ⊂ U2.
Por tanto (x1, x2) ∈ O1×O2 ⊂ U1×U2. Ya que O1×O2 es un conjunto abiertoy contiene al punto (x1, x2), U1 × U2 es un entorno de (x1, x2).
Sea ahora W un entorno del punto (x1, x2) en la topologıa producto. Hay quedemostrar que es posible encontrar un elemento de U1
x1×U2
x2incluıdo en el. Ya
que W es un entorno de (x, y), existe un elemento de la base de la topologıa,O1 ×O2, tal que
(x1, x2) ∈ O1 ×O2 ⊂ W,
con O1 ∈ τ1, O2 ∈ τ2. Pero O1 ×O2 ∈ U1x1× U2
x2.
3. La demostracion es analoga a la parte 1) y se deja al lector.
q.e.d
En el siguiente resultado se estudia el comportamiento de las operaciones interior,frontera y clausura en la topologıa producto respecto al producto de conjuntos.
Proposicion 1.1.3 Sean dos espacios topologicos (X1, τ1) y (X2, τ2) y A ⊂ X1,B ⊂ X2. Entonces:
1. int(A×B) =◦A × ◦
B.
2. Fr(A×B) = (Fr(A)×B) ∪ (A× Fr(B)).
3. A×B = A×B.

1.1. TOPOLOGIA PRODUCTO 5
Demostracion : Se prueba solamente el tercer apartado y se hace por doble inclusion.Sea (x, y) ∈ A×B. Entonces para cada U1 ∈ U1
x , y U2 ∈ U2y , y como U1 × U2 es
entorno de (x, y) se tiene que (U1×U2)∩(A×B) 6= ∅, es decir, (U1∩A)×(U2∩B) 6= ∅,luego U1 ∩ A 6= ∅ y U2 ∩B 6= ∅. Por tanto, x ∈ A e y ∈ B.
Por otra parte, sea (x, y) ∈ A × B. Para probar que (x, y) ∈ A×B basta condemostrar que todo entorno de una base de entornos de (x, y) interseca al conjuntoA × B. Se elige como base de entornos U1
x × U2y . Entonces para cada U1 ∈ U1
x y
U2 ∈ U2y , se tiene (U1 × U2) ∩ (A × B) 6= ∅. Pero como x ∈ A e y ∈ B, se tiene
U1 ∩ A 6= ∅ y U2 ∩B 6= ∅ y por tanto,
(U1 × U2) ∩ (A×B) = (U1 ∩ A)× (U2 ×B) 6= ∅.
q.e.d
Igual que ocurre con los conjuntos abiertos, un conjunto cerrado de un espaciotopologico producto no es necesariamente un producto de cerrados. Como muestrade ello se tiene el siguiente: F = {(x, x); x ∈ R} es un conjuntos cerrado de R2, puesF = f−1({0}) siendo f(x, y) = x− y. Sin embargo, F no es producto de conjuntoscerrados de R. Por otro lado, la tercera propiedad de la proposicion 1.1.3 nos diceque el producto de cerrados sı es un conjunto cerrado en la topologıa producto.
A continuacion, se estudia algunas topologıas productos de topologıas conocidas.
Ejemplo 1.1.4 1. Se considera dos espacios topologicos discretos (X, τD) e (Y, τ ′D).Sea x ∈ X e y ∈ Y . Como {x} e {y} son base de entornos de x e y respectiva-mente, por la proposicion 1.1.2, {x} × {y} = {(x, y)} es una base de entornosde (x, y) en la topologıa producto. Esto quiere decir que τD×τ ′D es la topologıadiscreta.
2. Sean (X, τT ) e (Y, τT ) dos espacios triviales. Como τT × τ ′T = {∅, X × Y }, latopologıa producto es la topologıa trivial.
3. Sea X = Y = (R, τCF ) y τ ′CF la topologıa de los complementos finitos deR2 = R × R. Se va a demostrar que τ ′CF ⊂ τCF × τCF . Sea O ⊂ τ ′CF y(x, y) ∈ O. El conjunto O es de la forma O = R2 \ {(x1, y1), . . . , (xn, yn)}.Para cada 1 ≤ i ≤ n, x 6= xi o y 6= yi. Despues de renombrar los puntos,supongase que x 6= xi para 1 ≤ i ≤ m e y 6= yi para m + 1 ≤ i ≤ n. SeaOi = (R \ {xi}) × R, 1 ≤ i ≤ m y Gi = R × (R \ {yi}) para m + 1 ≤ i ≤ n.

6 CAPITULO 1. TOPOLOGIA INICIAL
Cada uno de los conjuntos Oi y Gi son conjuntos abiertos en la topologıa delos complementos finitos. Entonces
(x, y) ∈ (O1 ∪ . . . ∪Om) ∪ (Gm+1 ∪ . . . ∪Gn) ⊂ O.
Sin embargo, τCF × τCF no esta incluıdo en τ ′CF ya que el conjunto comple-mentario de todo elemento de τCF × τCF no es un conjunto finito.
4. Sean X e Y dos conjuntos, p ∈ X, q ∈ Y y τp y τq las correspondientestopologıas del punto incluıdo. Llamamos τ la topologıa del punto incluıdo enX × Y para el punto (p, q). Se compara τ con τp × τq. Primero se demuestraque τp × τq ⊂ τ . Si O ∈ τp y O′ ∈ τq, entonces el conjunto O × O′ contieneal punto (p, q). En particular, O × O′ ∈ τ . Esto prueba que τp × τq ⊂ τ . Sinembargo, la inclusion τ ⊂ τp × τq no es cierta. Basta con tomar X = {a, p},Y = X y q = p. Entonces
τ = {∅, X×X, {(p, p)}, {(p, p), (a, p)}, {(p, p), (p, a)}, {(p, p), (a, a)}, {(p, p), (a, p), (p, a)}}.τp × τp = {∅, X ×X, {(p, p)}}.
Otro ejemplo: Sea X = Y = R, p = 0. Sea G = {(0, 0), (1, 1)} ∈ τ . Sifuera un conjunto abierto en la topologıa producto, habrıa O × O′ tal que(1, 1) ⊂ O × O′ ⊂ G. Como 0, 1 ∈ O y 0, 1 ∈ O′, entonces O × O′ tiene almenos cuatro puntos, en contradiccion con que G tiene solo dos.
†
Como ya se anticipo en la introduccion de este capıtulo, se va a probar que, efectiva-mente, la topologıa usual de R2 es la topologıa producto de la topologıa usual de Rpor ella misma. El proximo teorema estudia esta situacion en dimension arbitraria.
Teorema 1.1.5 Se consideran los espacios euclıdeos (Rn, τnu ) y (Rm, τm
u ) con sustopologıas usuales. Si se denota por τn+m
u la topologıa usual de Rn+m, entonces
τnu × τm
u = τn+mu .
(se esta identificando Rn × Rm como conjunto con Rn+m).
Demostracion : Se usa el criterio de Hausdorff. En la topologıa τn+mu se toma como
base de entornos de un punto (x, y) ∈ Rn × Rm la dada por las bolas centradas endicho punto, es decir,
βn+m(x,y) = {Bn+m
δ (x, y); δ > 0}.

1.1. TOPOLOGIA PRODUCTO 7
Por otro lado, se considera las bases de entornos en los puntos x ∈ Rn e y ∈ Rm
dadas porβn
x = {Bnε (x); ε > 0} βm
y = {Bmη (y); η > 0}.
Por la proposicion 1.1.2, una base de entornos del punto (x, y) en la topologıa pro-ducto es βn
x × βmy .
1. Dada una bola Bn+mδ (x, y), se elige ε = η = δ
2. Entonces
Bnε (x)×Bm
η (y) ⊂ Bn+mδ (x, y).
2. Sea ahora un entorno basico del punto (x, y) en la topologıa producto y del tipoBn
ε (x)×Bmη (y). Sea δ = min{ε, η}. Entonces se tiene la siguiente inclusion:
Bn+mδ (x, y) ⊂ Bn
ε (x)×Bmη (y).
q.e.d
A continuacion se analiza la topologıa producto de dos espacios metricos. El princi-pal hecho es que esta topologıa es una topologıa metrizable. Para ello se define unadistancia en el producto cartesiano de dos espacios metricos.
Definicion 1.1.6 Sean dos espacios metricos (X1, d1) y (X2, d2). En el conjuntoX1 ×X2 se define la distancia producto d mediante
d((x1, y1), (x2, y2)) = d1(x1, x2) + d2(y1, y2).
Se deja al lector probar que realmente es una distancia en el producto cartesiano.Se tiene ahora el siguiente resultado:
Proposicion 1.1.7 La topologıa producto de dos espacios metricos (X1, d1) y (X2, d2)es la topologıa inducida por la distancia producto.
Demostracion : La demostracion es analoga a la del teorema 1.1.5. Sea (x1, x2) ∈X1 × X2 y se considera las dos bases de entornos de (x1, x2) para cada una de lastopologıas:
1. Para la topologıa del espacio metrico (X1 × X2, d), se toma como base deentornos β(x1,x2) = {Bd
r (x1, x2); r > 0}.

8 CAPITULO 1. TOPOLOGIA INICIAL
2. Para la topologıa producto, se considera como base el producto de sendas basesen X1 y X2, esto es, β1
x1× β2
x2, con βi
xi= {Bi
r(xi); r > 0}, i = 1, 2.
Es evidente que dada la bola Bdr (x1, x2) y tomando s = r/2, se tiene la inclusion
B1s (x1) × B2
s (x2) ⊂ Bdr (x1, x2). Por otro lado, dado B1
r (x1) × B2s (x2), y definiendo
δ = min{r, s}, se satisface Bdδ (x1, x2) ⊂ B1
r (x1)×B2s (x2). q.e.d
Se estudia ahora la topologıa inducida de un producto topologico. Se consideran dosespacios topologicos (X1, τ1) y (X2, τ2) y sean A ⊂ X1 y B ⊂ X2 sendos subconjun-tos. En el conjunto A × B existen dos topologıas. Una es la topologıa relativa delproducto topologico X1×X2; la otra es τ1|A× τ2|B, es decir, un producto topologicode topologıas inducidas. El resultado siguiente nos dice que ambas topologıas soniguales.
Teorema 1.1.8 Sean dos espacios topologicos (X1, τ1) y (X2, τ2) y se considera A ⊂X1, B ⊂ X2. Entonces
τ1|A × τ2|B = (τ1 × τ2)|A×B.
Demostracion : Se demuestra que las dos topologıas tienen una misma base detopologıa, lo cual probarıas que ambas topologıas son las mismas. Primero recuerdeseque
τ1|A = {O1 ∩ A; O1 ∈ τ1} τ2|B = {O2 ∩B; O2 ∈ τ2}.Entonces una base de topologıa de τ1|A × τ2|B es
{(O1 ∩ A)× (O2 ×B); O1 ∈ τ1, O2 ∈ τ2}.
Pero(O1 ∩ A)× (O2 ∩B) = (O1 ×O2) ∩ (A×B).
Por otra parte, una base de topologıa de (τ1 × τ2)|A×B es se obtiene de tomar unabase de τ1 × τ2 e intersecarla con el conjunto A×B. Entonces,
{(O1 ×O2) ∩ (A×B); O1 ∈ τ1, O2 ∈ τ2}.
q.e.d
Este teorema se puede leer de la siguiente forma: el producto topologico de topologıasrelativas es la topologıa relativa del producto topologico.

1.2. APLICACIONES EN ESPACIOS PRODUCTOS 9
1.2 Aplicaciones en espacios productos
En esta seccion se estudian criterios de continuidad de aplicaciones que tienen pordominio o codominio espacios productos. Se empieza, como ya ya se habıa anticipadoen la introduccion, probando que las aplicaciones proyecciones en cada uno de losfactores son aplicaciones continuas. Se define primero las aplicaciones proyecciones.
Definicion 1.2.1 Sean dos conjuntos X1 y X2. Se definen las aplicaciones proyec-ciones como las aplicaciones pi : X1 ×X2 → Xi, i = 1, 2, dadas por
pi(x1, x2) = xi.
Proposicion 1.2.2 Sean dos espacios topologicos (X1, τ1) y (X2, τ2). Entonces lasaplicaciones proyecciones pi : (X1×X2, τ1× τ2) −→ (Xi, τi), i = 1, 2, son continuasy abiertas.
Demostracion : Se realiza solamente la demostracion para i = 1.
• Sea O1 ∈ τ1. Entonces p−11 (O1) = O1 ×X2. Pero O1 ×X2 ∈ τ1 × τ2, luego p1
es continua.
• Para probar que la aplicacion p1 es abierta, es suficiente con probar que laimagen de un elemento de la base τ1 × τ2 es un conjunto abierto en X1. Sea,pues, O1 ×O2 ∈ τ1 × τ2. Entonces, p1(O1 ×O2) = O1 ∈ τ1.
q.e.d
Por el contrario, las aplicaciones proyecciones no tienen porque ser cerradas. Elejemplo se halla en el plano euclıdeo R2. Se toma el conjunto H = {(x, y) ∈R2; xy = 1}. Este conjunto es cerrado, pues H = f−1({0}), donde f(x, y) = xy − 1y f es una aplicacion continua. Sin embargo, p1(H) = R\{0}, que no es un conjuntocerrado de R.
Se caracteriza las funciones continuas que tienen por codominio un espacio producto.
Teorema 1.2.3 Sean dos espacios topologicos (X1, τ1) y (X2, τ2) y una aplicacionf : X → X1 ×X2. Son equivalentes los siguientes enunciados:

10 CAPITULO 1. TOPOLOGIA INICIAL
1. La aplicacion f es continua.
2. Las aplicaciones pi ◦ f , i = 1, 2, son continuas.
Demostracion : La implicacion 1 ⇒ 2 es evidente. Para el recıproco, es suficientecon probar que f−1(O1 ×O2) es un subconjunto abierto en X. Pero
f−1(O1 ×O2) = (p1 ◦ f)−1(O1 ×O2) ∩ (p2 ◦ f)−1(O1 ×O2),
que es un conjunto abierto en X al ser interseccion de dos conjuntos abiertos. q.e.d
Corolario 1.2.4 Sean dos aplicaciones fi : X → Xi, i = 1, 2. Se define la evalu-acion de f1 y f2 como la aplicacion e(f1, f2) : X → X1 ×X2 dada por
e(f1, f2)(x) = (f1(x), f2(x)).
Si las aplicaciones f1, f2 son continuas, entonces la aplicacion evaluacion e(f1, f2)es continua.
Demostracion : Basta observar que pi ◦ e(f1, f2) = fi, i = 1, 2 y aplicar el teoremaanterior (vease figura 1.2). q.e.d
X1
X2
X x1 X2X
f1p1
e(f , )1 f2
p2f2
Figura 1.2: Aplicacion evaluacion.
Como aplicacion del ultimo corolario, se tiene los siguientes ejemplos de aplicacionesevaluacion.
1. Sea una aplicacion continua f : (X, τ) → (Y, τ ′). Entonces e(1X , f) es unaaplicacion continua de X a X × Y dada por
e(1X , f)(x) = (x, f(x)).

1.2. APLICACIONES EN ESPACIOS PRODUCTOS 11
2. Si (X, τ) es un espacio topologico, la aplicacion e(1X , 1X) : X → X × Xdefinida por x 7−→ (x, x) es una aplicacion continua.
El teorema 1.2.3 caracteriza la continuidad de aplicaciones que llegan a un productotopologico, pero ¿es posible dar una caracterizacion analoga para aplicaciones condominio en un espacio producto? Se analiza la siguiente situacion.
Se considera una aplicacion continua f : X1×X2 → Y . Para cada x2 ∈ X2 se definela aplicacion fx2 : X1 → Y mediante
fx2(x1) = f(x1, x2).
Analogamente se define para cada x1 ∈ X1, aplicaciones fx1 : X2 → Y . Estasaplicaciones son continuas, ya que fx2 = f ◦ i, donde i : X1 → X1 × X2 esta dadapor i(x1) = (x1, x2) (la aplicacion i es continua porque p1 ◦ i = 1X1 y p2 ◦ i esconstante).
Sin embargo, el recıproco de la anterior situacion es falso, es decir, las aplicacionesfx1 y fx2 pueden ser continuas sin que lo sea la aplicacion f . Como ejemplo de ello,se define la funcion f : R2 → R definida por
f(x, y) =
{xy
x2+y2 si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
Es facil probar que las aplicaciones fy y fx son continuas para cualesquiera x, y ∈ R.Sin embargo, la aplicacion f no es continua en el origen: la sucesion {( 1
n, 1
n)}
n∈Nconverge a (0, 0), pero {f( 1
n, 1
n)}
n∈N → 12.
Teorema 1.2.5 Sean (Xi, τi), (Yi, τ′i) i = 1, 2 cuatro espacios topologicos y fi :
Xi → Yi, i = 1, 2 dos aplicaciones. Se define la aplicacion producto f1 × f2 :X1 ×X2 → Y1 × Y2 como
(f1 × f2)(x1, x2) = (f1(x1), f2(x2)).
1. La aplicacion f1 × f2 es continua si y solo si f1 y f2 son continuas
2. La aplicacion f1 × f2 es homeomorfismo si y solo si f1 y f2 son homeomorfis-mos.
Demostracion : 1. Supongase que f1 × f2 es continua. La aplicacion f1 ◦ p1 escontinua pues
f1 ◦ p1 = p′1 ◦ (f1 × f2).

12 CAPITULO 1. TOPOLOGIA INICIAL
Vease figura 1.3. Se esta considerando pi y p′i las aplicaciones proyeccionesde X1 ×X2 e Y1 × Y2 respectivamente. Para probar que f1 es una aplicacioncontinua, sea un subconjunto abierto O′
1 de Y1. Por ser f1 ◦ p1 una aplicacioncontinua, (f1 ◦ p1)
−1(O′1) pertenece a τ1 × τ2. Pero
(f1 ◦ p1)−1(O′) = p−1
1 (f−11 (O′
1)).
Ya que la aplicacion p1 es abierta, el conjunto
p1(p−11 (f−1
1 (O′1)))
es un conjunto abierto en X1. Por ser la aplicacion p1 sobreyectiva, esteconjunto es justamente f−1
1 (O′1).
Supongase ahora que f1 y f2 son continuas. Entonces las aplicaciones
p′i ◦ (f1 × f2) = fi ◦ pi, i = 1, 2,
son continuas por ser composicion de aplicaciones continuas. Por tanto f1×f2
es continua.
2. Basta darse cuenta que si las aplicaciones f1 y f2 son biyectivas, la aplicacionf1 × f2 es biyectiva y su inversa es f−1
1 × f−12 .
q.e.d
Xi
X x1 X2
fi
pi
f1 f2xY x Y1 2
Yi
pi '
Figura 1.3: Las aplicaciones del teorema .
Como consecuencia de este teorema se tiene el siguiente resultado que cabıa esperar(ver introduccion)
”Si X1∼= Y1 y X2
∼= Y2, entonces X1 ×X2∼= Y1
∼= Y2.”

1.2. APLICACIONES EN ESPACIOS PRODUCTOS 13
Ejemplo 1.2.6 Se prueba que A = {(x, y); x ∈ (0, 1)} ⊂ R2 es homeomorfo aR2. Se sabe que (0, 1) es homeomorfo a R. Por tanto, (0, 1) × R es homeomorfoa R × R = R2 considerando en (0, 1) × R la topologıa producto. En verdad estatopologıa es τ|(0,1) × τ , siendo τ la topologıa usual de R. Pero el teorema 1.1.8 nosdice que esta topologıa es τ × τ|A. De forma mas general, se puede decir que dosrectangulos abiertos (acotados o no acotados) de R2 son homeomorfos a R2, y portanto, homeomorfos entre sı.
†
Una pregunta interesante que surge es como se puede embeber un espacio topologicoen un producto topologico, y si fuera posible, que este espacio producto sea metriz-able, porque en tal caso, la topologıa del espacio inicial serıa la procedente de unadistancia. En el siguiente ejemplo, se embebe un espacio topologico producto quees un subconjunto de R4, en el espacio euclıdeo R3.
Ejemplo 1.2.7 Se define el toro de dimension 2 como el espacio producto S1 × S1.Esta topologıa producto es la misma que la topologıa inducida de R4 en S1× S1. Sesabe que la aplicacionb inclusion de i : S1 × S1 ↪→ R4 es un embebimiento.
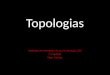
Sin embargo se va a demostrar que S1 × S1 tambien se embebe en R3, y por tanto,la topologıa de S1 × S1 es la inducida por la distancia euclıdea de un subconjuntode R3. Para ello, se toma el siguiente conjunto (figura 1.4)
T = {(x, y, z) ∈ R3;∃p ∈ C, ∃φ : R3 → R3 giro de eje z , φ(p) = (x, y, z)},donde
C = {(x, 0, z) ∈ R3; (x− a)2 + z2 = r2}con a > r > 0. No es difıcil probar que
T = {(x, y, z) ∈ R3; (√
x2 + y2 − a)2 + z2 = r2}.
Se define la aplicacion ϕ : S1 × S1 → T , mediante
ϕ(x, y, x′, y′) = ((a + rx)x′, (a + rx)y′, ry).
La aplicacion inversa esta dada por
ϕ−1(x, y, z) =
(√x2 + y2 − a
r,z
r,
x√x2 + y2
,y√
x2 + y2
).

14 CAPITULO 1. TOPOLOGIA INICIAL
r
a
x
y
z
T
Figura 1.4: El toro embebido en el espacio R3.
Por tanto, ϕ es un homeomorfismo entre T y S1 × S1. Si i es la inclusion de T enR3, entonces i ◦ ϕ es el embebimiento buscado.
†
Por tanto, se ha probado que S1×S1 se embebe en R3. Un problema que se plantea esel siguiente: se ha visto que el toro se embebe en R4 y en R3. ¿es posible encontrar unembebimiento en R2, o en R? Ya que se ha comentado que el problema de embeberun espacio topologico en un espacio euclıdeo Rm es importante, pero tambien serıainteresante hallar el mınimo numero natural m donde sea posible.
A continuacion se va a estudiar una condicion suficiente para hallar un embebimientode un espacio topologico producto en otro espacio topologico. Previamente se nece-sita la siguiente:
Definicion 1.2.8 Se considera dos aplicaciones fi : (X, τ) → (Xi, τi), i = 1, 2.
1. Se dice que {f1, f2} separan puntos si dados x 6= y ∈ X, existe i ∈ {1, 2} talque fi(x) 6= fi(y).
2. Se dice que {f1, f2} separan puntos de cerrados si dado un conjunto cerradoF ∈ F de X y x 6∈ F , existe i ∈ {1, 2} tal que fi(x) 6∈ fi(F ).
Lema 1.2.9 (Lema de Embebimiento) Sean tres espacios topologicos (X, τ), (X1, τ1), (X2, τ2)y dos aplicaciones continuas fi : X → Xi, i = 1, 2 . Supongase que {f1, f2}

1.2. APLICACIONES EN ESPACIOS PRODUCTOS 15
separan puntos y separan puntos de cerrados. Entonces la aplicacion evaluacione = e(f1, f2) :→ X1 ×X2 es un embebimiento.
Demostracion : La aplicacion es e continua, pues f1 y f2 son continuas (corolario1.2.4). Por otra parte, la aplicacion e es inyectiva, pues si x, y ∈ X y x 6= y, se eligei ∈ {1, 2} tal que fi(x) 6= fi(y). Por tanto e(x) 6= e(y). Con esto se ha probado quee : X → e(X) es una aplicacion biyectiva. Para finalizar la demostracion, se pruebaque la aplicacion e : (X, τ) → (e(X), (τ1 × τ2)|e(X)) es abierta. Sea O ∈ τ y x ∈ O.Entonces x 6∈ X \ O. Como X \ O es un conjunto cerrado, sea i ∈ {1, 2} tal quefi(x) 6∈ fi(X \O). Por tanto
fi(x) ∈ Xi \ fi(X \O).
Se llama Oi(x) = Xi \ fi(X \O), que satisface Oi(x) ⊂ Xi \ fi(X \ O). EntoncesOi(x) ⊂ Xi \ fi(X \ O). Sea G(x) = i−1p−1
i (Oi(x)), que es un conjunto abierto dee(X), donde i : e(X) ↪→ X1 × X2 es la inclusion. Entonces x ∈ G(x) ⊂ O, puescomo e : X → e(X) es biyectiva, basta con probar que e−1(G(x)) ⊂ e−1(O). Pero
e−1(G(x)) = e−1i−1p−1i (Oi(x)) = f−1
i (Oi(x)) ⊂ X \ f−1i fi(X \O) ⊂ O.
Por tanto x ∈ G(x) ⊂ O y e : X → e(X) es una aplicacion abierta. q.e.d
Corolario 1.2.10 Sean dos espacios topologicos (X1, τ1) y (X2, τ2). Entonces tantoX1 como X2 se pueden embeber en X1 ×X2.
Demostracion : Se toma la aplicacion identidad f1 = 1X1 de X1 y sea f2 : X1 → X2
la aplicacion definida por f2(x) = a2, donde a2 es un punto fijo de X2. Entonces,{f1, f2} son aplicaciones continuas que separan puntos y separan puntos de cerrados(por ser f1 la identidad). Por el lema de embebimiento, X1
∼= e(X1) = X1×{a2} ↪→X1 ×X2. q.e.d
Corolario 1.2.11 Sea una aplicacion continua f : (X, τ) → (Y, τ ′). Entonces X seembebe en X × Y como el grafo de la aplicacion f .
Demostracion : Se usa el lema de embebimiento a f1 = 1X y f2 = f . De nuevo,
X ∼= e(1X , f)(X) = G(f) = {(x, f(x)), x ∈ X} ⊂ X ×X.
q.e.d

16 CAPITULO 1. TOPOLOGIA INICIAL
Corolario 1.2.12 Sea un espacio topologico (X, τ). Entonces X se embebe en X×X como la diagonal, esto es, ∆ := {(x, x) ∈ X ×X; x ∈ X}.
Demostracion : En el lema de embebimiento, se toma f1 = f2 = 1X . q.e.d
Si se usa cada uno de los tres corolarios anteriores al espacio X = R, se prueba queR se puede embeber en R2 de tres formas diferentes: como la recta R× {a2}, comoel grafo de una aplicacion continua y como la diagonal de R2 (vease figura 1.5)
x2
fR
D
Rx{0}
Figura 1.5: Tres embebimientos de R en R2.
1.3 Topologıa inicial y producto topologico gen-
eralizado
En la anterior seccion se ha definido el producto topologico de dos espacios. Deforma analoga se puede definir el producto topologico de una familia finita de espaciostopologicos (Xi, τi), i = 1, . . . , n de la siguiente forma: la topologıa tiene como basea
τ1 × . . .× τn = {O1 × . . .×On; Oi ∈ τi}.Para generalizar el producto de dos espacios topologicos al producto de una familiaarbitraria de espacios, se va a deducir una caracterizacion de la topologıa producto dedos espacios, la cual permitira dar el concepto de topologıa inicial. Posteriormente,se definira el producto topologico generalizado. Al final de la seccion se probaraque, bajo unas hipotesis debiles, toda topologıa inicial es una topologıa producto.
Proposicion 1.3.1 Sean dos espacios topologicos (X1, τ1) y (X2, τ2) y las corre-spondientes aplicaciones proyecciones pi, i = 1, 2.

1.3. TOPOLOGIA INICIAL Y PRODUCTO TOPOLOGICO GENERALIZADO17
1. El conjunto S = {p−1i (Oi); i = 1, 2, Oi ∈ τ} es subbase de τ1 × τ2.
2. La topologıa producto es la topologıa menos fina que hace continuas a lasproyecciones.
Demostracion : 1. Es evidente que S ⊂ τ1 × τ2, luego τ(S) ⊂ τ1 × τ2. Por otraparte, para cada O1 ×O2 ∈ τ1 × τ2,
O1 ×O2 = (O1 ×X2) ∩ (X1 ×O2) = p−11 (O1) ∩ p−1
2 (O2) ∈ τ(S),
luego τ1 × τ2 ⊂ τ(S).
2. Ya se probo que las aplicaciones proyecciones pi : (X1×X2, τ1×τ2) → (Xi, τi),i = 1, 2 son continuas. Sea ahora una topologıa τ en X1 × X2 que hacecontinuas a las proyecciones. Entonces para cada Oi ∈ τi, p−1
i (Oi) ∈ τ . Portanto, para cada O1 ×O2 ∈ τ1 × τ2,
O1 ×O2 = p−11 (O1) ∩ p−1
2 (O2) ∈ τ,
es decir, τ1 × τ2 ⊂ τ .
q.e.d
Definicion 1.3.2 Dada una familia de aplicaciones {fi : X → (Xi, τi); i ∈ I}, sedenomina topologıa inicial en X inducida por {fi}i∈I a la topologıa de X que tienepor subbase S = {f−1
i (Oi); i ∈ I, Oi ∈ τi}.
Como consecuencia de la proposicion 1.3.1, la topologıa producto de dos espacios X1
y X2 es la topologıa inicial en X1×X2 inducida por la proyecciones p1 : X1×X2 → X1
y p2 : X1 ×X2 → X2. Se extiende la proposicion 1.3.1 y el teorema 1.2.3.
Proposicion 1.3.3 Sea una familia de aplicaciones {fi : X → (Xi, τi); i ∈ I} y seaτ la topologıa inicial para esta familia. Entonces τ es la topologıa menos fina quehace continuas a las aplicaciones fi. Por otra parte, si f : (Y, τ ′) → (X, τ) es unaaplicacion, entonces f es continua si y solo si fi ◦ f es continua para todo i ∈ I.
Demostracion : Por una parte, la continuidad de las aplicaciones fi : (X, τ) →(Xi, τi) es evidente por la definicion de S. Por otro lado, si τ es una topologıa en X

18 CAPITULO 1. TOPOLOGIA INICIAL
tal que fi : (X, τ) → (Xi, τi) es una aplicacion continua para cada i ∈ I, entoncesS ⊂ τ , luego τ(S) = τ ⊂ τ .
Para la segunda parte de la proposicion, si f es continua, fi ◦ f es continua al sercomposicion de aplicaciones continuas. Sea ahora el recıproco. Para ello es suficientecon probar que si Oij ∈ τij , para 1 ≤ j ≤ k, el conjunto
f−1(f−1
i1(Oi1) ∩ . . . ∩ f−1
ik(Oik)
)
es un conjunto abierto en Y . Pero esto es evidente porque
f−1(f−1
i1(Oi1) ∩ . . . ∩ f−1
ik(Oik)
)= (fi1 ◦ f)−1(Oi1) ∩ . . . (fik ◦ f)−1(Oik),
y cada uno de los elementos de la interseccion es un abierto en Y . q.e.d
Para el caso en que card(I) = 1, se tiene
Corolario 1.3.4 Sea X un conjunto, un espacio topologico (Y, τ ′) y una aplicacionf : X → (Y, τ ′). Entonces la topologıa inicial en X inducida por f es
τf = {f−1(O′); O′ ∈ τ ′}.
Demostracion : Solo hay que darse cuenta de que S = τf , luego τf ⊂ τ(S). Perof : (X, τf ) → (Y, τ ′) es continua y por tanto τf ⊃ τ(S). q.e.d
La topologıa relativa de un subconjunto de un espacio topologico es tambien unatopologıa inicial definida en dicho subconjunto, como muestra el siguiente:
Ejemplo 1.3.5 La topologıa relativa es la topologıa inicial inducida por la in-clusion, pues si i : A ↪→ (X, τ) es la aplicacion inclusion de un subconjunto Aen X, dado O ∈ τ , i−1(O) = O ∩ A ∈ τ|A, es decir, τi = τ|A. †
Se considera ahora una coleccion de conjuntos {Xi; i ∈ I}. El producto cartesianode {Xi; i ∈ I} se define como el conjunto
Πi∈IXi ={x : I → ⋃
i∈IXi; x(i) ∈ Xi,∀i ∈ I
}.
Se denota el elemento x como (xi), donde xi = x(i). De la misma forma, se define laaplicacion proyeccion sobre el j-esimo factor Xj como pj : Πi∈IXi → Xj y pj((xi)) =

1.3. TOPOLOGIA INICIAL Y PRODUCTO TOPOLOGICO GENERALIZADO19
xj. Por el axioma de eleccion, si todos los conjuntos Xi no son vacıos, el productoΠi∈IXi no es vacıo. Si el conjunto de ındices I es finito, es decir, si I = {1, . . . , n},el espacio producto se escribira por X1 × . . . × Xn (se puede identificar (xi) con(x1, . . . , xn)). Si para cada i, j, Xi = Xj, el espacio producto se denotara por XI .
Gracias a la proposicion 1.3.1, se generaliza la topologıa producto de dos espaciosal producto de una familia arbitaria.
Definicion 1.3.6 Se considera una familia de espacios topologicos {(Xi, τi); i ∈ I}.Se llama topologıa producto en Πi∈IXi a la topologıa inicial para la familia de lasproyecciones {pi; i ∈ I}. A esta topologıa como Πi∈Iτi.
Para la topologıa producto, una subbase viene dada por
S = {p−1i (Oi); i ∈ I, Oi ∈ τi}.
La base de abiertos correspondiente es
β = {p−1i1
(Oi1) ∩ . . . ∩ p−1ik
(Oik); k ∈ N, Oij ∈ τij}.Ahora bien,
p−1ij
(Oij) = ΠIVi,
de forma que Vi = Xi para i 6= ij y Vij = Oij para j = 1, . . . , k. Por tanto
p−1i1
(Oi1) ∩ . . . ∩ p−1ik
(Oik) = Πi∈IOi
donde Oi ∈ τi y Oi = Xi para i 6= i1, . . . , ik, es decir,
β = {Πi∈IOi; Oi ∈ τi, y, excepto un numero finito de ındices , Oi = Xi}es una base de la topologıa producto. Es facil observar que la topologıa productode dos espacios es un caso particular de la topologıa producto generalizada.
Las siguientes propiedades sobre la topologıa producto son sencillas de probar.
Proposicion 1.3.7 Sea una familia de espacios topologicos {(Xi, τi); i ∈ I}. En-tonces:
1. Si βi es una base de topologıa para τi para cada i ∈ I, entonces
Πi∈Iβi = {ΠIBi; Bi ∈ βi y, excepto para un numero finito de ındices, Bi = Xi}es una base de de la topologıa producto Πi∈Iτi.

20 CAPITULO 1. TOPOLOGIA INICIAL
2. Si para cada i ∈ I, βi(xi) es una base de entornos del punto xi, entonces
Πi∈Iβi(x) = {ΠiVi; Vi ∈ βi(x) y, excepto un numero finito de ındices, Vi = Xi}es una base de entornos del punto (xi)i∈I .
3. Sea una familia de aplicaciones {hi : (Xi, τi) → (Yi, τ′i); i ∈ I}. Se define una
aplicacionΠi∈Ihi : ΠIXi −→ ΠIYi
dada por(Πi∈Ihi)((xi)) = (hi(xi)).
Entonces ΠIhi es continua si y solamente si cada aplicacion hi es continuapara cada i ∈ I.
Por otro lado, existe una topologıa en el producto ΠIXi que generaliza, en ciertosentido, a la topologıa producto de dos espacios topologicos: dicha topologıa se llamala topologıa caja. Esta topologıa se define como la que tiene por base a la familia
β = {ΠIOi; Oi ∈ τi}Se denota por τ la topologıa generada por β. Evidentemente si I es finito, estatopologıa coincide con la topologıa producto. Ademas ΠIτi ⊂ τ , ya que los elementosde la subbase estandar de ΠIτi son elementos de β.
La diferencia importante entre la topologıa producto y la topologıa caja se basa enque afirmaciones que son ciertas para el producto finito de espacios, continuan siendociertas para la topologıa producto, pero no para la topologıa caja. Por ejemplo, laproposicion 1.3.3 es falsa en la topologıa caja. Para ello se estudia el siguiente:
Ejemplo 1.3.8 Se considera el conjunto
RN = {h : N→ R; h es aplicacion}.
Se define f : R → RN mediante f(x)(i) = x, es decir, f(x) = (x). Entonces
pn ◦ f = 1R, y por tanto, si en RN se considera la topologıa producto, la aplicacionf es continua. Sin embargo, f no es continua con la topologıa caja. Para ello, seconsidera el conjunto abierto en la topologıa caja definido por O = Π
n∈N(− 1n, 1
n).
Este conjunto abierto contiene a la aplicacion cero, es decir, h(n) = 0, para cadan ∈ N. Si f fuera continua en 0 con la topologıa caja, existirıa r > 0 tal quef(−r, r) ⊂ O. Entonces pn ◦ f(−r, r) ⊂ pn(O) = (− 1
n, 1
n), lo cual es falso para un n
suficientemente grande. †

1.3. TOPOLOGIA INICIAL Y PRODUCTO TOPOLOGICO GENERALIZADO21
Se extiende el lema de embebimiento para una familia arbitraria de espacios topologicos.Primero se relaciona el concepto de ”separar puntos de cerrados” y el concepto detopologıa inicial.
Proposicion 1.3.9 Sea una familia de aplicaciones continuas {fi : (X, τ) → (Xi, τi); i ∈I}. Son equivalentes:
1. La familia {fi; i ∈ I} separa puntos de cerrados.
2. La familia de subconjuntos {f−1i (Oi); i ∈ I, Oi ∈ τi} es base de la topologıa τ .
Demostracion : 1 ⇒ 2. Se considera un subconjunto abierto O en X y x ∈ O.Entonces x 6∈ X \ O, que es un conjunto cerrado. Por tanto, existe i ∈ I tal quefi(x) ∈ Xi \ fi(X \O). El conjunto Oi(x) = Xi \ fi(X \O) es un conjunto abiertode Xi. Ademas x ∈ f−1
i (Oi(x)) ⊂ O.
2 ⇒ 1. Se considera un conjunto cerrado F de X y x 6∈ F . Existe i ∈ I y existeOi ∈ τi tal que x ∈ f−1
i (Oi) ⊂ X \ F . Entonces fi(x) 6∈ fi(F ): ya que Oi es entornode fi(x), si existe z ∈ Oi ∩ fi(F ), existe y ∈ F tal que fi(y) = z, luego y ∈ f−1
i (Oi),lo cual no es cierto. q.e.d
Corolario 1.3.10 Se considera una familia de aplicaciones continuas {fi : (X, τ) →(Xi, τi); i ∈ I} que separa puntos de cerrados. Entonces la topologıa τ es la topologıainicial.
Demostracion : La familia β = {f−1i (Oi); i ∈ I, Oi ∈ τi} es base de τ y por tanto,
subbbase de la misma topologıa. q.e.d
Como consecuencia se va a demostrar que, con mınimas hipotesis, toda topologıainicial se puede ver como una topologıa producto.
Teorema 1.3.11 (teorema de embebimiento) Se considera una familia de apli-caciones continuas {fi : (X, τ) → (Xi, τi); i ∈ I}, donde τ es la topologıa inicial paralas aplicaciones fi. Si {fi; i ∈ I} separa puntos, entonces la aplicacion evaluaciones un embebimiento de (X, τ) en (ΠIXi, ΠIτi).

22 CAPITULO 1. TOPOLOGIA INICIAL
Demostracion : La aplicacion evaluacion es continua e inyectiva. Por tanto basta conprobar que es una aplicacion abierta. Primero se prueba que si Oi ∈ τi, entoncese(f−1
i (Oi)) ∈ ΠIτi|e(X): ya que fi = pi ◦ i ◦ e,
f−1i (Oi) = e−1(i−1(p−1
i (Oi))),
luego e(f−1i (Oi)) = i−1p−1
i (Oi) ∈ ΠIτi|e(X).
Sea ahora un conjunto abierto O ∈ τ y x ∈ O. Entonces existe k ∈ Nx ∈ f−1
i1(Oi1) ∩ . . . ∩ f−1
ik(Oik) ⊂ O.
Por tanto, y como la aplicacion e : X → e(X) es biyectiva, se tiene
e(x) ∈ ⋂k
j=1e(f−1
ij(Oij)) ⊂ e(O).
q.e.d
1.4 Grupo topologico
En esta seccion se estudiara una familia importante de espacios topologicos formadapor los grupos topologicos. No son mas que espacios topologicos junto con unaestructura de grupo de forma que las operaciones del grupo son continuas. Ya quela operacion de grupo esta definida en un espacio producto, es dentro del marco dela topologıa producto el lugar adecuado para definir grupo topologico.
El hecho caracterıstico de los grupos topologicos se debe a que la estructura alge-braica del espacio topologico que tiene por ser grupo hace que este espacio tengauna gran riqueza de propiedades topologicas. Por ejemplo, y se vera a lo largo detoda la seccion, el estudio de la topologıa del grupo se puede centrar en gran medidaen el estudio de la topologıa alrededor de un unico elemento del espacio.
Por otra parte, espacios que nos son familiares son grupos topologicos, como sonlas circunferencias, los espacios euclıdeos, toros, etc. Ademas algunos espacios dematrices son grupos topologicos. Los espacios de matrices actuan sobre los espacioseuclıdeos, originando nuevos espacios topologicos con interesantes propiedades (deforma mas amplia se estudiaran estos espacios en el capıtulo 9).
Definicion 1.4.1 Dado un grupo (G, ·) dotado de una topologıa τ , se dice que esun grupo topologico, y se denotara por (G, ·, τ), si las siguientes aplicaciones son

1.4. GRUPO TOPOLOGICO 23
continuas:
ϕ : (G×G, τ × τ) −→ (G, τ), ϕ(x, y) = x · y.
θ : (G, τ) −→ (G, τ), θ(x) = x−1.
Es facil comprobar que la continuidad de estas dos aplicaciones es equivalente a quela aplicacion ψ : (G × G, τ × τ) → (G, τ) dada por ψ(x, y) = x · y−1 sea continua.Observese tambien que θ es una aplicacion biyectiva cuya inversa es ella misma,luego θ : G → G es un homeomorfismo.
A continuacion se da una serie de ejemplos de grupos topologicos.
Ejemplo 1.4.2 1. Si a un grupo cualquiera (G, ·) se toma la topologıa discretaentonces se forma un grupo topologico. De esta forma, el grupo de los numerosenteros (Z, +) con la topologıa inducida de R, es un grupo topologico, ya queesta topologıa es justamente la topologıa discreta.
2. Sea un grupo topologico (G, ·, τ) y H un subgrupo suyo . Entonces (H, ·, τ|H)es un grupo topologico.
3. El espacio euclıdeo (Rn, +), donde + es la operacion suma de vectores, con latopologıa usual es un grupo topologico.
4. Se considera el conjunto de los numero complejos excepto el cero C∗ = {z ∈C; z 6= 0}. Este conjunto es un grupo con la multiplicacion usual de numeroscomplejos. Entonces es un grupo topologico si se le dota de la topologıainducida de la usual de R2.
5. La circunferencia unidad S1, con la topologıa usual, y la operacion productode numeros complejos, es un grupo topologico al ser subgrupo de C∗.
6. Se considera el espacio de matrices cuadradas reales de orden n al cual seescribira por gl(n,R) o Mn×n(R). Ademas es un grupo respecto de la sumade matrices. Este espacio es biyectivo de forma natural con el espacio euclıdeoRn2
: concretamente, una matriz cuadrada se considera como el vector de Rn2
determinado de escribir de forma seguida todas las filas de la matriz. Se dotaal espacio de matrices de la topologıa inicial con esta biyeccion (o lo que es lomismo, con la distancia dada por la metrica g(A,B) = traza(ABt)). Entonces,
ya que la suma de matrices se convierte en la suma de vectores de Rn2
graciasa la identificacion con Rn2
, el espacio gl(n,R) es un grupo topologico.

24 CAPITULO 1. TOPOLOGIA INICIAL
7. Se considera el conjunto Gl(n,R) = {A ∈ gl(n,R); det(A) 6= 0} de las matri-ces cuadradas reales de orden n y determinante no nulo. Dicho conjunto sedenomina el grupo lineal general. Este espacio es un grupo con el producto dematrices. Se le dota de la topologıa inducida de gl(n,R). Entonces es un grupotopologico. La demostracion se hara posteriormente en el ejemplo 1.4.11.
8. Tambien son grupos topologicos, considerados como subgrupos de Gl(n,R),los siguientes espacios:
(a) El grupo ortogonal O(n) = {A ∈ Gl(n,R); AAt = AtA = I}.(b) El grupo especial ortogonal SO(n) = {A ∈ O(n); det(A) = 1}.(c) El grupo lineal especial SL(n,R) = {A ∈ Gl(n,R); det(A) = 1},
donde det(A) denota el determinante de la matriz A.
9. Se considera un grupo topologico (G′, ·, τ ′), sea G un conjunto y una aplicacionbiyectiva f : G → G′. Se define en G una operacion binaria que hace que Gsea un grupo y f un isomorfismo de grupos: si x, y ∈ G, se define ϕ mediante
ϕ(x, y) = f−1(ϕ′(f(x), f(y))).
Se considera en G la unica topologıa τ que hace que f sea un homeomorfismo.Entonces (G, ·, τ) es un grupo topologico: es suficiente con ver que
ϕ = f−1 ◦ ϕ′ ◦ (f × f) θ = f−1 ◦ θ′ ◦ f.
†
Se demuestra que Gl(n,R) es un grupo topologico. Se toma la aplicacion productode matrices,
P : Gl(n,R)×Gl(n,R) −→ Gl(n,R)
P (A,B) = AB.
Se prueba que esta aplicacion es continua. Es suficiente con que i ◦ P sea con-tinua, donde i : Gl(n,R) ↪→ gl(n,R) ≡ Rn2
es la aplicacion inclusion. Para ello, se
considera las aplicaciones proyecciones pij : Rn2 → R. Entonces
pij ◦ P (A,B) = (AB)ij =n∑
k=1
aikbkj =n∑
k=1
pik(A)pkj(B)
=n∑
k=1
(pik ◦ p1)(pkj ◦ p2)(A,B).

1.4. GRUPO TOPOLOGICO 25
Por tanto, pij ◦ P es continua. Para finalizar de probar que Gl(n,R) es un grupotopologico hay que probar que la aplicacion inversa Q : Gl(n,R) → R,dada porQ(A) = A−1 es continua. Primero se demuestra que la aplicacion determinantedet : gl(n,R) → R es continua. Esto se debe a que
det(A) =∑
σ∈Sn
(−1)sgn(σ)a1σ(1) . . . anσ(n)
=∑
σ∈Sn
(−1)sgn(σ)(p1σ(1) . . . pnσ(n))(A).
Por otra parte, la aplicacion traspuesta
t : gl(n,R) −→ gl(n,R), t(A) = At
tambien es continua, pues pij ◦ t = pji. Entonces
Q(A) = A−1 =1
det(A)t(A∗),
donde A∗ es la matriz adjunta. Por tanto, para probar que Q es continua, basta conprobar que la aplicacion A 7−→ A∗ es continua. Pero (i < j)
pij(A∗) = (−1)i+jdet(Aij)
= (−1)i+j∑
τ∈Sn−1
a1τ(1) . . . ai−1τ(i−1)ai+1τ(i) . . . ajτ(j−1)aj+1τ(j+1) . . . anτ(n)
= (−1)i+j∑
τ∈Sn−1
p1τ(1) . . . pi−1τ(i−1) . . . pi+1τ(i) . . . pjτ(j−1)pj+1τ(j+1) . . . pnτ(n)(A).
Se prueba ahora que Gl(n,R) es un conjunto abierto de gl(n,R) y que en Gl(n,R),los subespacios O(n), SO(n) y Sl(n,R) son conjuntos cerrados.
1. Ya que Gl(n,R) = det−1(R \ {0}), es un conjunto abierto de gl(n,R).
2. Se define T : Gl(n,R) → Gl(n,R) por T (A) = AAt. Esta aplicacion escontinua ya que
pij ◦ T (A) = (n∑
k=1
pikpkj)(A).
Ya que O(n) = T−1({I}), el grupo ortogonal es un conjunto cerrado.
3. De forma analoga, SL(n,R) es un conjunto cerrado, pues es el conjuntodet−1({1}).

26 CAPITULO 1. TOPOLOGIA INICIAL
4. El espacio SO(n) es un conjunto cerrado, pues SO(n) = O(n) ∩ SL(n,R).
Se deja al lector la demostracion de la siguiente proposicion:
Proposicion 1.4.3 Sean dos grupos topologicos (G1, τ1) y (G2, τ2). Entonces (G1×G2, τ1 × τ2) es un grupo topologico, considerando en G1 ×G2 la operacion productode grupos.
Corolario 1.4.4 El toro T = S1 × S1 es un grupo topologico.
Proposicion 1.4.5 Sea un grupo topologico (G, τ) y a ∈ G un elemento suyo. Sedefinen las traslaciones a izquierda y derecha respecto del elemento a las aplicacionesdadas, respectivamente, por:
la : G → G, la(x) = ax.
ra : G → G, ra(x) = xa.
Entonces las traslaciones son homeomorfismos.
Demostracion : Se hace la demostracion para las traslaciones a izquierda. Sea f :G → G×G dada por f(x) = (a, x). Esta aplicacion es continua y la = ϕ ◦ f , dondeϕ es la aplicacion producto. Por otra parte, es evidente que la aplicacion inversa dela es la traslacion a izquierda la−1 , luego tambien es continua. q.e.d
Corolario 1.4.6 Si se denota por U el sistema de entornos del elemento neutro een un grupo topologico G, entonces para todo a ∈ G, el sistema de entornos de a es
Ua = aU = {aU ; U ∈ U} = Ua = {Ua;U ∈ U}.
Demostracion : Como la es un homeomorfismo y la(e) = a, Ua = {la(U); U ∈ U} ={aU ; U ∈ U}. De la misma forma Ua = {ra(U); U ∈ U} = {Ua;U ∈ U}. q.e.d
Proposicion 1.4.7 Sea e el elemento neutro de un grupo topologico G. Entoncesse tiene las siguientes propiedades sobre su sistema de entornos U :
1. Para cada U ∈ U , existe V ∈ U tal que V V ⊂ U .

1.4. GRUPO TOPOLOGICO 27
2. Para cada U ∈ U , existe V ∈ U tal que V −1 ⊂ U .
3. Para cada U ∈ U , existe V ∈ U tal que V V −1 ⊂ U .
4. Para cada U ∈ U y para cada a ∈ A, existe V ∈ U tal que aV a−1 ⊂ U .
5. Para cada U ∈ U , existe V ∈ U satisfaciendo V = V −1 tal que V ⊂ U .
Demostracion : 1. Se considera la aplicacion producto ϕ en el grupo. Ya queϕ(e, e) = e, la continuidad de ϕ nos asegura la existencia de un entorno W de(e, e) tal que ϕ(W ) ⊂ U . Sean V1, V2 ∈ U tal que V1 × V2 ⊂ U . El entornoV = V1 ∩ V2 satisface V V = ϕ(V, V ) ⊂ U .
2. Sea θ la aplicacion inversa en el grupo. Ya que θ(e) = e, y como θ es unaaplicacion continua, existe V ∈ U tal que θ(V ) = V −1 ⊂ U .
3. La demostracion es analoga a 1), pero usando la aplicacion ψ(x, y) = xy−1.
4. Se define la aplicacion ηa : G → G, ηa(x) = axa−1. Esta aplicacion es continua,pues ηa = la ◦ ra−1 . De nuevo por la continuidad de la aplicacion ηa, existe unentorno V tal que ηa(V ) ⊂ U , es decir, aV a−1 ⊂ U .
5. Sea V = U ∩ U−1. Entonces V = V −1 y V es entorno de e, pues U−1 = θ(U).
q.e.d
Como consecuencia de la proposicion 1.4.7 se tiene que la familia de entornossimetricos de e, es decir, el conjunto {U ∈ U ; U = U−1} es una base de entornos dee.
Nota. Las aplicaciones ηa del apartado 4 son homeomorfismos de G en G por sercomposicion de los homeomorfismo la y ra−1 . Ademas, la aplicacion inversa de ηa esηa−1 . †Una muestra de como influye la estructura algebraica de un grupo topologico en suspropiedades topologicas es el siguiente teorema sobre subgrupos:
Teorema 1.4.8 Sea un subgrupo H de un grupo topologico G. Entonces:
1. La adherencia de H, H, es un subgrupo topologico de G.
2. Si H es un subgrupo normal de G, tambien lo es H.

28 CAPITULO 1. TOPOLOGIA INICIAL
3. Si H es un conjunto abierto, tambien es un conjunto cerrado.
Demostracion : 1. Se considera la aplicacion ψ : G×G → G dada por ψ(x, y) =xy−1. Esta aplicacion es continua. Para probar que H es un grupo, se demues-tra que ψ(H ×H) ⊂ H. La continuidad de ψ y el hecho de que H subgrupo,asegura que
ψ(H ×H) = ψ(H ×H) ⊂ ψ(H ×H) ⊂ H.
2. Para probar que H es un subgrupo normal hay que probar que para cadaa ∈ G, aHa−1 ⊂ H. Sin embargo, ya que la aplicacion ηa definida en laproposicion anterior es un homeomorfismo,
aHa−1 = ηa(H) = ηa(H) = aHa−1 ⊂ H.
3. En G se define la relacion de equivalencia x ∼ y si y−1x ∈ H. La clase deequivalencia de un elemento x ∈ G es xH = {xh; h ∈ H}. Esta relacion defineuna particion en G:
G =⋃
a∈GaH = H
⋃(⋃
a 6=eaH).
Ya que H es un conjunto abierto, aH tambien es abierto para todo a ∈ G, puesaH = la(H) y la traslacion la es un homeomorfismo. Por tanto
⋃a6=eaH es un
conjunto abierto por ser union de conjuntos abiertos. Como H = G\⋃a6=eaH,
H tambien es un conjunto cerrado.
q.e.d
Teorema 1.4.9 Sea un homomorfismo de grupos f : (G, τ) → (G′, τ ′) entre dosgrupos topologicos. Entonces si f es continua en el elementos neutro de G, escontinua en todo G.
Demostracion : La aplicacion f es continua en a ∈ G. Para ello, sea W ′ ∈ Uf(a). Seaun entorno V ′ del elemento neutro de G′, e′ tal que W ′ = f(a)V ′ (concretamente,V ′ = l−1
f(a)(W )). Por la continuidad en e, existe U ∈ U tal que f(U) ⊂ V ′. EntoncesaU es un entorno de a y como f es un homomorfismo de grupos, se tiene
f(aU) = f(a)f(U) ⊂ f(a)V ′ ⊂ W ′.
q.e.d

1.4. GRUPO TOPOLOGICO 29
Definicion 1.4.10 Sea un grupo topologico (G, ·) y un espacio topologico (X, τ).Una accion topologica de G sobre X es una accion algebraica G × X → X que escontinua, tomando en G×X la topologıa producto.
Recuerdese 1 que una accion algebraica de un grupo G sobre un conjunto X es unaaplicacion G×X → X, (g, x) 7−→ gx, que satisface las dos siguientes propiedades:
1. (e, x) 7−→ x, para cada x ∈ X.
2. (g, (h, x)) 7−→ (gh)x, para cada g, h ∈ G y x ∈ X.
Dada una accion algebraica, se definen los dos siguientes conceptos:
• Si x ∈ X, se llama subgrupo de isotropıa de x o estabilizador de x el conjuntoHx = {g ∈ G; gx = x}..
• Si x ∈ X, se llama orbita de x al conjunto Gx = {gx; g ∈ G}.
A continuacion se muestra una serie de acciones continuas, que seran usadas en elcapıtulo 9.
Ejemplo 1.4.11 1. Se hace actuar Gl(n,R) sobre Rn como
Gl(n,R)× Rn −→ Rn
(A, x) 7−→ Ax.
Como casos interesantes, tenemos los dos siguientes:
(a)
O(n + 1)× Sn −→ Sn
(A, x) 7−→ Ax.
Esta accion esta bien definida, pues O(n+1) representa las isometrıas deRn+1 y por lo tanto deja invariante a la esfera de dimension n.
1Consultar por ejemplo ”Lectures in Abstract Algebra” de N. Jacobson, ed. Van Nostrand, NewYork, 1953

30 CAPITULO 1. TOPOLOGIA INICIAL
(b) Del mismo modo, se tiene la accion
SO(n + 1)× Sn −→ Sn
(A, x) 7−→ Ax.
2. Sea G un grupo finito con la topologıa discreta que actua algebraicamentesobre un espacio (X, τ). Se define para cada g ∈ G la aplicacion ϕg : X → Xcomo ϕg(x) = gx. Si todas las aplicaciones ϕg son continuas para cada g ∈ G,entonces la accion algebraica es una accion topologica:
Demostracion : Si O es un conjunto abierto de X,
ψ−1(O) = {(g, x) ∈ G×X; gx ∈ O} = {(g, x) ∈ G×X; ϕg(x) ∈ O}=
⋃g∈G
({g} × ϕg−1(O)),
y esta union es una union de conjuntos abiertos en la topologıa producto deG×X (observar que en G, {g} es un conjunto abierto). q.e.d
3. Se aplica el anterior ejemplo del siguiente modo. Se considera un homeomor-fismo f : X → X de orden finito, es decir, existe un menor numero natural ptal que fp = 1X . Se define una accion Zp ×X → X dada por
([n], x) 7−→ f◦ n. . . ◦f(x) = fn(x).
Es facil probar que esta bien definida y que es una accion algebraica. Seconsidera en Zp la topologıa discreta. Entonces dicha accion es topologica,pues ϕ[n] = fn.
Como muestra de esta situacion es la siguiente: sea la aplicacion antıpoda enla esfera Sn, es decir, A : Sn → Sn, definida por A(x) = −x. Esta aplicaciones de orden 2, luego Z2 actua continuamente sobre Sn.
Otro ejemplo es considerar el grupo Z × Z y hacerlo actuar sobre R2 delsiguiente modo
((m, n), (x, y)) 7−→ (m + x, n + y).
†

1.5. EJERCICIOS 31
1.5 Ejercicios
1. Dados dos espacios metricos (X1, d1) y (X2, d2) se define la distancia d dada
por d =√
d21 + d2
2. Probar que esta distancia es equivalente a la distanciaproducto.
2. Se considera una aplicacion f : (X, τ) → (Y, τ ′). Sea el grafo de f dado porG(f) = {(x, f(x)) ∈ X × Y ; y = f(x)}. Probar que son equivalentes lossiguientes enunciados:
(a) La aplicacion x 7−→ (x, f(x)) de X a G(f) es un homeomorfismo.
(b) La aplicacion φ : X → X × Y dada por φ(x) = (x, f(x)) es un embe-bimiento.
(c) La aplicacion f es continua.
3. Sean los espacios (R, τu) y (R, τCF ). Estudiar el interior y la adherencia en elespacio producto de los conjuntos {(x, 0) ∈ R2; x ∈ R} y {(0, x) ∈ R2; x ∈ R}.Comparar con la topologıa usual de R2 y estudiar si la aplicacion f : (R2, τu) →(R2, τu × τCF ) dada por f(x, y) = (y, x) es continua y abierta.
4. Sean dos espacios topologicos (X1, τ1), (X2, τ2) y A ⊂ X1 × X2 un conjuntoabierto (resp. cerrado) en la topologıa producto. Para cada x1 ∈ X1 se define
Ax1 = {x2 ∈ X2; (x1, x2) ∈ A}.Probar que Ax1 es un subconjunto abierto (resp. cerrado) de X2. Dar ejemplosde subconjuntos de R2 tales que A no es abierto (resp. cerrado) pero Ax sı esabierto (resp. cerrado) para cada x ∈ R.
5. Sean dos espacios topologicos (X, τ) e (Y, τ ′). Supongase que ambos satisfacenalguna de las siguientes propiedades: T0, primer axioma de numerabilidad,segundo axioma de numerabilidad. Estudiar si X×Y con la topologıa productotiene la propiedad correspondiente de X e Y .
6. Sea un espacio topologico (X, τ), donde τ es la topologıa inicial para unafamilia de aplicaciones {fi : (X, τ) → (Xi, τi); i ∈ I}. Sea A ⊂ X. Probar queτ|A es la topologıa inicial en A para la familia {fi|A : A → (Xi, τi)}.
7. Se define la aplicacion ’parte entera’ E : R → (R, τCF ). Caracterizar losconjuntos abiertos y cerrados para la topologıa inicial y calcular el interior ycierre del intervalo [−1
2, 3
2].

32 CAPITULO 1. TOPOLOGIA INICIAL
8. Sean dos aplicaciones abiertas fi : Xi → Yi, i = 1, 2 (resp. cerradas). Entoncesf1 × f2 es una aplicacion abierta (resp. cerrada). Estudiar si es cierto elrecıproco.
9. Probar que (X1 ×X2, τ1 × τ2) es homeomorfo a (X2 ×X1, τ2 × τ1)
10. Sea una familia de espacios {(Xi, τi); i ∈ I} y Ai ⊂ Xi para cada i ∈ I.Entonces
Πi∈I(τi|Ai) = (Πi∈Iτi)|Πi∈IAi
11. Sean dos familias de espacios topologicos {(Xi, τi); i ∈ I} e {(Yi, τ′i); i ∈ I} y
una familia de aplicaciones {fi : Xi → Yi}. Entonces Πfi es un homeomorfismosi y solamente se da las dos siguientes condiciones:
(a) Para cada i ∈ I, fi es un homeomorfismo local.
(b) Existe J ⊂ I finito tal que para cada i 6∈ J , fi es un homeomorfismo.
12. Probar que R con la topologıa inicial determinada por las aplicaciones f1, f2 :R→ (R, τS), f1(x) = x + 1, f2(x) = −x coincide con la topologıa discreta.
13. Sea τS la topologıa de Sorgenfrey en R. Probar que τS × τS no es la topologıadiscreta en R2, pero el subconjunto A = {(x,−x); x ∈ R} hereda de latopologıa producto la topologıa discreta.
14. En R se considera la topologıa τS. Sean f1, f2 : R → (R, τS) las aplicacionesdefinidas por f1(x) = x y f2(x) = −x. Determinar la topologıa inicial sobre Rpara la familia {f1, f2}.
15. Se consideran las aplicaciones
f1 : R2 \ {(0, 0)} −→ R, f1(x, y) = x2 + y2
f2 : R2 \ {(0, 0)} −→ (S1, τCF ), f2(x, y) =(x, y)√x2 + y2
.
Describir una base de la topologıa inicial y compararla con la usual. Hallar laadherencia y el interior de los conjuntos
A = {(x, y) ∈ R2; |x|+ |y| ≤ 1} ∪ {(x, 0); x ∈ R}
B = {(x, y) ∈ R2; y = 2}.

1.5. EJERCICIOS 33
16. Sea una familia de espacios topologicos {Xi; i ∈ I} y Ai ⊂ Xi, para cada i.Estudiar si se dan las siguientes igualdades:
Πi∈IAi = Πi∈IAi, Πi∈I int(Ai) = int(Πi∈IAi).
17. Se considera X = RR el conjunto de aplicaciones de R en R y sea la topologıaproducto, tomando en cada R la topologıa usual. Sea una sucesion {fn}n∈Nen X y f ∈ X. Probar que {fn}n∈N converge puntualmente a f si y solo sifn → f (en la topologıa producto).
18. Sea de nuevo el espacio X del ejercicio anterior y se define para cada f, g ∈ X,d(f, g) = sup{|f(x) − g(x)|; x ∈ R} (se considerara que d(f, g) = ∞ si estesupremo no existe). Probar que d es una distancia en X. Sea τ su topologıa.Comparar con la topologıa producto. Si {fn}n∈N ⊂ X y f ∈ X, entoncesfn → f si y solo si la sucesion converge uniformemente a f .
19. Sea una familia {(Xn, dn); n ∈ N} de espacios metricos. Probar que ΠXn esun espacio metrizable. Sugerencia: suponer, sin perder generalidad, que paratodo dn, se tiene dn < 1, y definir
d((xn), (yn)) =∞∑
n=1
dn(xn, yn)
2n.
20. Probar que S1 es homeomorfo a SO(2) construyendo explıcitamente un home-omorfismo que ademas sea un isomorfismo de grupos.
21. Demostrar la proposicion 1.4.3.
22. Calcular los subgrupos de isotropıa y las orbitas de las acciones topologicasdeinidas en el ejemplo 1.4.11.
23. Sea un grupo abeliano G. Se define para cada A ⊂ G
r(A) = {x ∈ G;∃n ∈ N, xn ∈ A}.
Probar que se puede definir sobre G una unica topologıa τ en la cual A esun conjunto cerrado si y solo si r(A) = A. Demostrar tambien que la unionarbitraria de cerrados es cerrado y caracterizar los conjuntos abiertos. Porultimo, probar que G, con dicha topologıa, no es un grupo topologico.