Upload
jesusmonterodelavega
View
243
Download
5
Embed Size (px)
Citation preview
ContenidoPrologo . . . . . . . . . . . . . . . . . . . . . . . . . . Leccion 1 Funciones . . . . . . . . . . . . . . . . . . . . . . . . .1.1. Introduccion . . . . . . . . . . . . . . . . 1.2. El concepto de funcion . . . . . . . . . . . 1.3. Funciones Inyectivas, Suprayectivas y Biyectivas 1.4. Propiedades basicas . . . . . . . . . . . . Problemas y ejercicios . . . . . . . . . . . . 2.1. El conjunto Rn . . . . . . . . . . 2.2. El espacio vectorial Rn . . . . . . Problemas y ejercicios . . . . . . . 2.3. Espacios vectoriales abstractos . . . Problemas y ejercicios . . . . . . . 2.4. Interpretacion geometrica en R2 y R3 Problemas y ejercicios . . . . . . . 2.5. Rectas en el plano y en el espacio . 2.6. Planos en el espacio . . . . . . . Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4. . . . . 7 8 10 14 16
7
Leccion 2 El espacio vectorial Rn . . . . . . . . . . . . . . . . . . . 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Leccion 3 El espacio normado Rn . . . . . . . . . . . . . . . . . . . 453.1. La norma euclidiana en Rn . . . . . . . . . . . 3.2. El concepto general de norma en Rn . . . . . . . 3.3. Otras normas en Rn. Norma Cubica y Norma k k1. 3.4. Norma de Minkowski. . . . . . . . . . . . . . Problemas y ejercicios . . . . . . . . . . . . . .
17 19 21 21 23 26 31 32 39 43 45 49 51 55 56
Leccion 4 El espacio metrico Rn . . . . . . . . . . . . . . . . . . . . 591
4.1. La metrica euclidiana en Rn . . . . . . . . . . . . . . . . . . . 59 4.2. Otras metricas en Rn . . . . . . . . . . . . . . . . . . . . . . 61
Leccion 5 Bolas y esferas . . . . . . . . . . . . . . . . . . . . . . . 63 Leccion 6 Conjuntos abiertos y conjuntos cerrados . . . . . . . . . . . . 746.1. Conjuntos abiertos y conjuntos cerrados 6.2. Familias de conjuntos . . . . . . . . 6.3. Propiedades basicas . . . . . . . . 6.4. Vecindad de un punto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 82 84 87 5.1. Bolas abiertas, bolas cerradas y esferas . . . . . . . . . . . . . . 63 5.2. Relacion entre las normas k k1 , k k2 y k k1 . . . . . . . . . . . . 72 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . . 73
Leccion 7 Interior y adherencia . . . . . . . . . . . . . . . . . . . . 89 Leccion 8 Frontera . . . . . . . . . . . . . . . . . . . . . . . . . 99 Leccion 9 Punto de acumulacion . . . . . . . . . . . . . . . . . . 1037.1. Punto interior y punto adherente . . . . . . . . . . . . . . . . . 89
8.1. Punto frontera y frontera de un conjunto . . . . . . . . . . . . . 99 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . 102
Leccion 10 Sucesiones en Rn . . . . . . . . . . . . . . . . . . . . .11.1. De nicion de l mite de una sucesion 11.2. L mite de las sucesiones proyeccion 11.3. Algebra de l mites . . . . . . . . Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1. Punto de acumulacion y Conjunto Derivado . . . . . . . . . . . 103 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . 107 10.1. De nicion y ejemplos . . . . . . . . . . . . . . . . . . . . 108 . . . .
108
Leccion 11 Convergencia . . . . . . . . . . . . . . . . . . . . . .
112
Leccion 12 Punto L mite . . . . . . . . . . . . . . . . . . . . . .2
112 115 117 118
12.1. Subsucesiones y puntos l mite . . . . . . . . . . . . . . . . . 119 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . 122
119
Leccion 13 Criterios de convergencia . . . . . . . . . . . . . . . . .
13.1. Criterio de Cauchy . . . . . . . . . . . . . . . . . . . . . 123 13.2. Teorema de Bolzano-Weierstrass . . . . . . . . . . . . . . . 124 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . 127
123
Leccion 14 Funciones de varias variables reales . . . . . . . . . . . . . Leccion 15 L mite de una funcion . . . . . . . . . . . . . . . . . . .
14.1. Terminolog a y ejemplos . . . . . . . . . . . . . . . . . . . 128 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . 133
128
15.1. La de nicion de l mite . . . . . . . . . . . . . . . . . . . . 134 15.2. Algunas propiedades basicas . . . . . . . . . . . . . . . . . 140 Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . 146 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
134
Leccion 16 Funciones continuas . . . . . . . . . . . . . . . . . . .16.1. De nicion y ejemplos . . . 16.2. Algunas propiedades basicas 16.3. Mas propiedades . . . . . Problemas y ejercicios . . . .
148
148 151 152 154
Leccion 17 Continuidad uniforme . . . . . . . . . . . . . . . . . . . . .17.1. La de nicion . . . . . . . . . . . . . . . . . . . . . . . . . 17.2. Continuidad vs. continuidad uniforme . . . . . . . . . . . . . .
Leccion 18 Conjuntos compactos . . . . . . . . . . . . . . . . . . . . .18.1. La de nicion y equivalencias . . . . . . . . . . . . . . . . . . 18.2. Teorema de Heine-Borel . . . . . . . . . . . . . . . . . . . . Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . .
Leccion 19 Conjuntos conexos . . . . . . . . . . . . . . . . . . . . . .19.1. La de nicion y equivalencias . . . . . . . . . . . . . . . . . . Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . . 3
Leccion 20 Continuidad, compacidad y conexidad
20.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20.2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Problemas y ejercicios . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
4
PrologoEl proposito de escribir estas lecturas sobre Topolog a de Rn es apoyar a los alumnos del curso de Calculo III que se ofrece en el Departamento de Matematicas de la Facultad de Ciencias de la UNAM. En casi todos los libros de texto que circulan en nuestro medio sobre el as llamado \Calculo Avanzado" generalmente se dedica un cap tulo a la topolog a de Rn, haciendo en la mayor a de los casos un tratado muy super cial. Las limitaciones naturales en el tiempo con el cual contamos los profesores para un curso normal de un semestre, nos impide profundizar o ampliar algunos topicos. Esto es justo y tambien inevitable, pues el dedicarle un mayor numero de horas-clase al tema, ser a en sacri cio de otros igualmente importantes. Sobre el tema hay una basta literatura, sin embargo la secuencia logica de los conceptos y la organizacion misma de los resultados en estas lecturas, y por lo tanto algunas demostraciones tienen un tanto de originalidad. Si bien es cierto que todos los autores al nal de cuentas pretenden alcanzar los mismos resultados, cuando menos los relevantes de una teor a, los textos di eren uno de otro en sus puntos de partida, en las de niciones convenidas y en como encadenan los resultados parciales. En otras palabras, en general un texto di ere de otro en el camino que siguen para alcanzar un determinado resultado. Lo que para un autor puede ser una de nicion, para otro es un teorema y viceversa. Esto tambien determina el caracter mismo de los ejercicios que se dejan para el lector. Un problema puede resultar trivial respecto a un texto pero dif cil respecto a otro. El camino que hemos seguido en estas lecturas ofrece cierta econom a, en el sentido de que nos permite obtener los resultados mas rapida y facilmente que como se hace en otros textos. La econom a en los argumentos no siempre re eja mayor claridad o lucidez en los razonamientos o en su interpretacion en algun contexto, 5
incluso puede ir en sacri cio de una buena didactica. Sin embargo este no es el caso, pues durante la escritura de este texto hemos estado concientes de ello y procuramos no desatender ese aspecto. Ocasionalmente aparecera alguna demostracion con cierta originalidad, o a lo menos un tanto diferente de las comunes. Inclu mos estas demostraciones porque las consideramos mas simples, mas claras o porque el enfoque puede resultar mas ilustrativo. Por ejemplo, para probar la desigualdad de Cauchy-Schwarz en Rn, cuyo aspecto es un tanto complicado, recurrimos a un argumento tan simple que, despues de leer la demostracion y observar la desigualdad con detenimiento, podemos convencernos de que es casi obvia. Sobre todo si se compara nuestra prueba con las demostraciones que se encuentran comunmente en la literatura, las cuales recurren a ciertos arti cios que generalmente desconciertan a los principiantes. Otro tema que merece comentarse es el de punto de acumulacion de un conjunto, las pruebas que presentamos son considerablemente mas simples que las que aparecen comunmente en la literatura matematica, la clave para lograrlo es una mera observacion sobre el modo de enunciar la de nicion, lo cual establecemos en un lema. Otro aspecto que vale la pena mencionar, ya que puede ser una diferencia de fondo respecto a los demas textos, es que ciertos conceptos se presentan y desarrollan paralelamente. Hemos adoptado este tratamiento debido a la aparente contraposicion entre los conceptos involucrados, pero tambien debido a una interesante y util dualidad entre ellos. Ese es el caso, por ejemplo, de los conceptos de conjunto abierto y conjunto cerrado, as como interior y adherencia de un conjunto. La dualidad no solamente resulta interesante sino un buen recurso nemotecnico para recordar resultados, o incluso una tecnica para descubrirlos. Los requisitos para estas lecturas son algebra elemental de conjuntos, por ejemplo nociones de pertenencia, contencion, union e interseccion de dos o un numero nito de conjuntos as como un curso anual o dos semestrales de Calculo de funciones de una variable real del primer a~o de una carrera de matematicas. Es deseable, n pero no indispensable tener algunos conocimientos sobre Espacios Vectoriales. El texto fue escrito durante mi estancia sabatica en la Facultad de Ciencias de la Universidad Nacional Autonoma de Mexico, por lo que agradezco a las autoridades de esta Facultad las facilidades que me otorgaron para su realizacion. Agradezco al profesor Pedro Aguilar Beltran por su valiosa colaboracion que hicieron posible esta primera edicion. Agradezco a mi hijo Pedro Antonio Rivera que se encargo de todas las gra cas. Deseo dar las gracias a las autoridades del Centro de Investigacion y de Estudios Avanzados del I.P.N. por concederme el per odo sabatico. Mexico, D. F., abril de 1992. 6
Leccion 1Funciones
ha ocupado un lugar de excelencia en el metodo cient co. Uno de lo fuertes defensores de la matematica en este sentido fue el lososofo y matematico frances Rene Descartes (1596-1650), quien declaraba que no admit a ni esperaba ningun principio en f sica, a no ser aquellos que se explicaran mediante la geometr a o la matematica abstracta. Podemos considerar que la matematica moderna nace en el siglo XVII, con la creacion de la geometr a anal tica y el calculo in nitesimal, con ello nace el concepto de funcion, el cual es uno de los conceptos mas importantes de la matematica. No nos estamos re riendo solamente a la idea de dependencia, lo cual existe desde la epoca griega, sino al concepto de funcion por s mismo como elemento esencial de la matematica. La mayor a de las funciones conocidas en el siglo XVII fueron estudiadas como curvas, este fue el caso, por ejemplo, de la funciones ax , log x, sen x. La gra ca de esta ultima, es decir la curva senoidal, aparece en un trabajo sobre la Cicloide cuyo autor es el matematico frances Personne de Roberval (1602-1675), a la cual llama \curva compa~era de la cicloide". n En esa epoca dispon an de tablas de valores para las funciones trigonometricas y logar tmicas con un alto grado de aproximacion, sin embargo, el concepto de funcion no estaba totalmente claro. Un intento de de nicion de funcion, en el siglo XVII, fue dada por el matematico y astronomo escoces James Gregory, quien dec a que una funcion era una cantidad obtenida de otras cantidades por una sucesion de operaciones algebraicas o por cualquier otra operacion imaginable (por esto ultimo 7
1.1. Introduccion. Desde la epoca de Galileo Galilei (1564-1642), la matematica
se refer a al \paso al l mite"). La palabra funcion fue usada por primera vez en 1673 por el abogado, losofo y matematico aleman Gottfried Wilhelm Leibniz (16461716), a quie se le deben tambien los terminos variable, constante y parametro. Leibniz no solamente paso a la historia de la matematica por la creacion del calculo, quien junto con Newton comparte ese honor, sino que tambien fue un importante losofo e invento una calculadora mecanica, la cual era una version perfeccionada de la maquina de Pascal. Actualmente, el concepto de funcion ya es una nocion muy depurada, sin embargo, las funciones interpretadas como \formulas" o \expresiones matematicas", o bien como \gra cas" siguen teniendo vigencia. En la practica, podemos decir que lo relevante de una funcion es: a) la expresion matematica que la de ne b) su gra ca c) una tabla de valores Desde el punto de vista conceptual, concebir una funcion de esta manera es insu ciente. Por ejemplo, si deseamos establecer con precision los resultados del calculo, conviene interpretar las funciones como reglas de asociacion y distinguir los valores de la funcion de la funcion misma. En este aspecto, resulta de gran utilidad el s mbolo f(x), introducido por el matematico suizo Leonhard Euler (1707-1783), el mas prol co de todos los tiempos.
1.2. El concepto de Funcion. Aun cuando en este libro solamente manejaremosfunciones de las que llamaremos de varias variables reales con valores reales o vectoriales, es conveniente que estudiemos los elementos basicos acerca de funciones en forma general, pues este importante concepto esta presente en todas las areas de la matematica.
De nicion 1. Dados X, Y, conjuntos cualesquiera, una con X y Y, es toda regla o ley de asociacion que hace corresponder a cada elemento x 2 X uno y solo un elemento y 2 Y.Usualmente a las funciones (las cuales son reglas), se les asigna nombres de una sola letra de nuestro alfabeto como son f; g; h; F; G; H, pero tambien se pueden usar nombres mas largos, letras de alfabetos de otros idiomas o incluso s mbolos. Si f es una funcion con dominio X y contradominio Y, para referirnos a este hecho escribiremos 8
f :X!Y lo cual debe leerse \f de X en Y". Dado x 2 X; si y 2 Y es el elemento asociado a x segun la funcion f, escribiremos f x 7! y o x 7! y; en la ultima simbolizacion hemos omitido el nombre de la funcion f, y esta notacion la usaremos solamente cuando no haya ambiguedad sobre la funcion a la cual nos estemos re riendo. Una manera mas socorrida de representar este mismo hecho es escribiendo y = f(x), lo cual debe leerse \y igual a f de x". Si y = f(x), diremos que y es la de x bajo f, y que x es de y. Tambien diremos que y es el de f en x. En terminos menos formales diremos que \x va a dar a y bajo f". El conjunto de imagenes
f y j y = f(x) para algun x 2 X glo denotaremos por f(X) y le llamaremos de la funcion f (algunos autores de texto le llaman de f). En general, si A X, la bajo f es el conjunto f(A) = f y j y = f(x) para algun x 2 A g Si M es un subconjunto del contradominio Y, la de M bajo f es el conjunto f 1 (M) = f x 2 X j f(x) 2 M g La de un conjunto A bajo una funcion f : X ! Y es un subconjunto del contradominio Y, mientras que la de un conjunto M bajo una funcion f es un subconjunto del dominio X de f. El s mbolo f 1 (M) debe leerse \imagen inversa de M" y de ninguna manera \f a la menos 1 de M" o \f inversa de M". Mas adelante hablaremos de la funcion \f inversa", pero en este caso no estamos re riendonos a ella. En terminos estrictos, una funcion f : X ! Y es la terna (f; X; Y), donde X es el dominio de la funcion, Y es el contradominio y f es la regla de asociacion o de correspondencia. Dos funciones son iguales si y solamente si son iguales los terminos correspondientes de la terna. Si dos funciones tienen distinto contradominio, son diferentes. Por ejemplo, las funciones 9
f : R! R dadas respectivamente por
y
g : R ! R+ f0g g(x) = x2
f(x) = x2;
son diferentes. En la mayor a de los casos resulta totalmente irrelevante cual es el contradominio de una funcion, por ejemplo, usted podr a pensar que esto es as para las funciones anteriores. En cierto modo, lo mas importante de una funcion es su dominio y la regla de asociacion f, cuando este sea el caso obviaremos las diferencias respecto al contradominio, siempre y cuando ello no cause confusion alguna, como regla general identi caremos dos funciones que solo di eran en el contradominio. Por otra parte, con frecuencia nos referiremos a la regla f, como a la funcion misma, de hecho esta fue nuestra primera de nicion, y la seguiremos adoptando a lo largo del texto; solamente en situaciones muy especiales podr amos hacer la distincion entre la funcion como terna y la funcion como regla de asociacion. Una funcion cuyo dominio sea un subconjunto de los numeros reales, le llamaremos . Una funcion cuyo contradominio sea un subconjunto de los reales, es decir, una funcion cuyos valores son numeros reales, le llamaremos . En nuestro primer curso de calculo estudiamos funciones reales de variable real. Dado que las funciones reales de variable real, generalmente estan dadas por \formulas", haremos de una vez para siempre la convencion de que si no se indica expl citamente el dominio y el contradominio, entonces deberemos entender que el dominio consiste de todos los numeros reales para los cuales tenga sentido o se pueda calcular \la formula", y el contradominio se sobreentendera que consiste de todos los numeros reales R. Por ejemplo, la funcion f dada por f(x) = log(1 x2); tiene por dominio el intervalo ( 1; 1). As que podemos escribir f : ( 1; 1) ! R
1.3. Funciones Inyectivas, Suprayectivas y Biyectivas. Consideremos las funciones f y g, ambas R ! R, dadas porf(x) = x2 10 g(x) = x3
Hay una diferencia importante entre ellas, en la primera se \repiten" sus valores, por ejemplo se tiene f( 1) = f(1) = 1, f( 3) = f(3) = 9. Es decir, hay un par de puntos x, y de su dominio R (de hecho hay una in nidad de pares de puntos, nosotros hemos ilustrado dos pares) donde la funcion toma el mismo valor. Para la segunda funcion esto no ocurre, es decir, siempre que se tomen dos puntos diferentes de su dominio R, se obtendran valores diferentes. Una funcion con las caracter sticas de g se dice que es inyectiva, la funcion f no es inyectiva. Observemos que las dos funciones tienen como dominio y contradominio el conjunto R, la funcion f solamente toma valores no negativos, es decir, hay elementos del contradominio que no son valores de la funcion, por ejemplo, 1 no es un valor que pueda asumir la funcion f, mientras que la funcion g toma como valor todo elemento de su contradominio. Una funcion como g se dice que es suprayectiva; la funcion f no es suprayectiva. A continuacion precisamos estos conceptos
De nicion 2. Sea f : X ! Y una funcion arbitraria.
1) Se dice que f es o , si puntos diferentes del dominio tienen imagenes diferentes. Es decir, si se vale la implicacion x1; x2 2 X; x1 6= x2 ) f(x1 ) 6= f(x2 ) eqivalentemente, si x1; x2 2 X; f(x1 ) = f(x2 ) ) x1 = x2
2) Se dice que f es o , si cada elemento de su contradominio es imagen de algun elemento de su dominio. Es decir, si para cada y 2 Y, existe x 2 X tal que y = f(x). 3) Se dice que f es , si es inyectiva y suprayectiva a la vez. 11
Nota. En forma breve podemos decir que f es suprayectiva si F (X) = Y . Por otra parte, que f sea suprayectiva signi ca que existe y 2 Y, para la cual no existe x 2 X que cumpla y = f(x). Dicho de otro modo, f no es suprayectiva si existe y 2 Y tal que y = f(x) para toda x 2 X. Una funcion no suprayectiva, \esencialmente puede 6hacerse" suprayectiva rede niendo su contradominio igual a su imagen: f : X ! f(X); sin embargo, en terminos estrictos esta funcion es diferente de la original, pero posee lo esencial de ella. 1) La funcion f dada por f(x) = x es biyectiva trivialmente. Recordemos que nuestra convencion para estos casos es que R siempre sera el contradominio, el dominio dependera de la formula o expresion. Para la funcion dada, el dominio es R mismo. 2) g(x) = ex es inyectiva pero no suprayectiva, pues toma solamente valores positivos. 3) h(x) = log x es inyectiva y suprayectiva, o sea, es biyectiva 4) F(x) = tan x es suprayectiva pero no inyectiva 5) f(x) = x4 no es inyectiva ni suprayectiva 6) G(x) = arctan x es inyectiva pero no suprayectiva Si una funcion f : X ! Y es inyectiva pero no suprayectiva, rede niendo su contradominio obtenemos una funcion biyectiva. Hablando estrictamente, lo que se obtiene es otra funcion, sin embargo, como se dijo anteriormente, identi caremos ambas funciones, en todo caso podemos entender que ignoramos la funcion original y que asignamos el mismo nombre a la funcion rede nida. Las funciones biyectivas son especialmente importantes, para ellas hacemos la siguiente de nicion De nicion 3. Si f : X ! Y es una funcion biyectiva, su o simplemente la de f, es la funcion f 1 : Y ! X de nida como sigue: para cada y 2 Y, f 1 (y) = x si f(x) = y Ejemplo 2. La funcion logaritmo log : R+ ! R, cuyo valor en cada x 2 R+ es log x es biyectiva y su inversa es la funcion exponencial exp : R ! R+ , cuyo valor en cada real es exp(x) = ex . Esta ultima funcion tambien es biyectiva y su inversa es la funcion logaritmo, vale decir que son mutuamente inversas. Tenemos un resultado general el cual es obvio 12
Ejemplo 1.
Terminamos esta seccion con dos proposiciones que se prueban facilmente Proposicion 2. Si f : X ! Y y g : Y ! Z son funciones biyectivas, entonces la composicion g f : X ! Z es biyectiva. Mostremos que g f es inyectiva: Sean x1 y x2 elementos diferentes de X. Como f es inyectiva, tenemos que f(x1 ) 6= f(x2 ). Como g es inyectiva, tenemos que g(f(x1 )) 6= g(f(x2 )), es decir (g f)(x1 ) 6= (g f)(x2 ). Esto prueba que g f es inyectiva. Mostremos que g f es suprayectiva: Sea z 2 Z. Como g es suprayectiva, existe y 2 Y tal que g(y) = z. Como f es suprayectiva, para la y encontrada existe x 2 X tal que f(x) = y. Se tiene entonces g(f(x)) = z, es decir (g f)(x) = z. Esto prueba que g f es suprayectiva. Hemos probado que g f es biyectiva. | Proposicion 3. Sean f : X ! Y y g : Y ! X dos funciones cualesquiera. Si g f es la funcion identidad X ! X, es decir. si (g f)(x) = x para toda x 2 X, entonces f es inyectiva y g suprayectiva. Mostremos que f es inyectiva: Sean x1 y x2 elementos de X tales que f(x1 ) = f(x2 ). Se tiene entonces g(f(x1 )) = g(f(x2 )); pero g(f(x)) = x para toda x 2 X, por lo tanto x1 = x2. Esto prueba que f es inyectiva. Mostremos que g es suprayectiva: Elijamos un punto arbitrario x del contradominio X de g. Sea y = f(x), se tiene entonces g(y) = g(f(x)) = (g f)(x) =x Esto prueba que g es suprayectiva. 13
f
Proposicion 1. Si f : X ! Y es una funcion suprayectiva, entonces as lo es : Y ! X, y ademas (f ) = f.1 1 1
Demostracion.
Demostracion.
|
1.4. Propiedades basicas. Finalizamos este cap tulo con algunas propiedadessobre imagenes, union e interseccion de conjuntos. Se tiene entonces 1) Si A B entonces f(A) f(B) 2) f(A B) = f(A) f(B) 3) f(A \ B) f(A) \ f(B) 4) f(A B) f(A) 5) f(A B) f(A) f(B)
Proposicion 4. Sea f : X ! Y una funcion arbitraria y A, B subconjuntos de X.
Prueba de (2): Sea y 2 f(A B); existe x 2 A B tal que y = f(x). Si x 2 A, entonces y = f(x) 2 f(A), luego y 2 f(A) f(B). Si x 2 B, entonces y = f(x) 2 f(B), luego, tambien obtenemos que y 2 f(A) f(B). En cualquiera de los casos hemos obtenido que y 2 f(A) f(B), esto prueba la contencion f(A B) f(A) f(B). La contencion f(A) f(B) f(A B) se sigue de la parte (1) y de los hechos A A B y B A B. Prueba de (3): Esta contencion se sigue de (1) y de la contenciones A \ B A y A \ B B, pues f(A \ B) f(A) y f(A \ B) f(B). El inciso (4) se sigue inmediatamente de la parte (1) Prueba de (5): Sea y 2 f(A) f(B); tenemos entonces y 2 f(A) y y 2 f(B). Existe x 2 A tal = que y = f(x), esta x no puede estar en B, pues si se tuviese x 2 B, querr a decir y 2 f(B), as que x 2 A B, esto signi ca que y = f(x) 2 f(A B). Esto prueba la proposicion 4. | Es facil probar que en el inciso (3) no se cumple en general la igualdad. Por ejemplo, considerese la funcion f dada por f(x) = x2 y los conjuntos A = ( 1; 0), B = (0; 1), la interseccion de ellos es el conjunto vac o por lo que f(A \ B) = , pero f(A) \ f(B) = (0; 1). El mismo ejemplo sirve para mostrar que en general no hay igualdad en el inciso (5). 14
Demostracion. El inciso (1) es obvio.
Las imagenes inversas son mejor comportadas, como se muestra en la siguiente proposicion
Proposicion 5. Sea f : X ! Y una funcion arbitraria y F, G subconjuntos de Y.Se tiene entonces 1) Si F G entonces f 1 (F) f 1 (G) 2) f 1 (F G) = f 1 (F) f 1 (G) 3) f 1 (F \ G) = f 1 (F) \ f 1(G) 4) f 1 (F G) = f 1 (F) f 1 (G)
Prueba de (1): Sea x 2 f 1 (F); se tiene entonces f(x) 2 F. Como F G, f(x) 2 G; pero esto signi ca a su vez vez que x 2 f 1 (G). Prueba de (2): Sea x 2 f 1 (F G); se tiene entonces f(x) 2 F G. Hay dos posibilidades, f(x) 2 F o f(x) 2 G. Si f(x) 2 F, entonces x 2 f 1 (F), luego x 2 f 1 (F) f 1 (G). Si f(x) 2 G, entonces x 2 f 1 (G), luego x 2 f 1 (F) f 1 (G). En cualquiera de los dos casos se tiene x 2 f 1 (F) f 1 (G), hemos probado que f 1 (F G) f 1 (F) f 1 (G). La prueba de la otra contencion se sigue de la parte (1) y de los hechos F F G, G F G. Prueba de (3): Sea x 2 f 1 (F) \ f 1 (G); se tiene entonces, x 2 f 1 (F) y x 2 f 1 (G), es decir f(x) 2 F y f(x) 2 G, o sea f(x) 2 F \ G. Pero esto signi ca que x 2 f 1 (F \ G). Hemos probado que f 1 (F) \ f 1 (G) f 1 (F \ G). La otra contencion se sigue de la parte (1) y de los hechos F \ G F y F \ G G. Prueba de (4): Sea x 2 f 1 (F G); se tiene entonces f(x) 2 F G, luego f(x) 2 F y f(x) 2 G, = esto implica que x 2 f 1 (F) y x 2 f 1 (G), es decir x 2 f 1 (F) f 1 (G). Esto = prueba la contencion f 1 (F G) f 1 (F) f 1 (G). Sea ahora x 2 f 1 (F) f 1 (G); se tiene entonces x 2 f 1 (F) y x 2 f 1 (G), luego = f(x) 2 F y f(x) 2 G, es decir f(x) 2 F G. Pero esto signi ca que x 2 f 1 (F G). = 15
Demostracion.
Esto prueba la contencion f 1 (F) f 1 (G) f 1 (F G) y por lo tanto el inciso (4). | La prueba de la siguiente proposicion es muy facil y se deja como ejercicio para el lector.
Proposicion 6. Sea f : X ! Y una funcion arbitraria y A, F subconjuntos de X y Y respectivamente. Se tiene entonces 1) f(f 1 (F)) = F \ f(X) 2) f 1 (f(A)) A Problemas y Ejercicios.1. Pruebe la proposicion 6. 2. En cada uno de los siguientes incisos, determine el dominio de las funciones que se indican 1 a) f(x) = 1 1 xx 2 1 2 1 x 1 1 x+1 2 +1 c) F (x) = log( x2 1 1 1) + 1 d) G(x) = log( x2 + 0:9 1) rx 1 e) h(x) = 2 x b) g(x) =x x
1 f) H(x) = (x 1)(2 x) 3. Pruebe que en general no se cumple la igualdad f 1 (f(A)) = A. 4. Pruebe que la funcion f dada por f(x) = x3 es biyectiva. x 5. Pruebe que la funcion f : R ! ( 1; 1), dada por f(x) = 1 + jxj es biyectiva. 16
s
6. Pruebe que la funcion f dada por f(x) = 200x3 90x2 +12x+1 no es inyectiva.
Leccion 2El Espacio Vectorial Rn
2.1. El conjunto Rn. Las funciones que estudiamos en nuestros cursos de CalculoI y II, son de las que se llaman de una variable, por ejemplo f(x) = log x g(x) = x3 1 1 + son funciones que dependen de x, que se denomina variable independiente y a la cual podemos asignarle valores numericos que elegimos de un subconjunto de los numeros reales, al que hemos llamado dominio de la funcion. Para la funcion f el dominio esta constitu do por todos los reales positivos, mientras que el dominio de g esta formado por todos los reales con excepcion de x = 1. Dado que las funciones que estudiabamos ten an como dominio un subconjunto de los numeros reales R, en nuestro curso de Calculo I hicimos un estudio previo de este conjunto, antes de iniciar propiamente el tratado sobre funciones. Ahora nuestro interes estara enfocado hacia las funciones de mas de una variable, por ejemplo de dos variables. Una funcion de este tipo se dice que es de varias variables y suelen de nirse mediante formulas. 17
Por ejemplo f(x; y) = xy g(x; y) = log(x2 y2 ) h(x; y) = x + z 1 y son funciones de varias variables. Para hablar del dominio de una funcion de varias variables, necesitaremos de un nuevo ente matematico en donde lo ubicaremos. Este nuevo ente es el conjunto Rn , que a continuacion de nimos. De nicion 1. Para cada natural n, Rn es el conjunto de n-adas ordenadas (x1; x2; : : :; xn), de numeros reales: Rn = f (x1 ; x2; : : :; xn) j x1 ; x2; : : :; xn 2 R g Cada elemento de la n-ada (x1 ; x2; : : :; xn) lo denominaremos una . Los elementos de Rn los denotaremos por la correspondiente letra minuscula pero sin ndice, por ejemplo x = (x1; x2; : : :; xn), a = (a1; a2; : : :; an). Tambien haremos la identi cacion obvia de R1 con R misma. En terminos estrictos R1 no es otra cosa que el conjunto f (x) j x 2 R g, pero en este caso ser a necio usar los parentesis que encierran la x. La de nicion resulta interesante para los casos n = 2; 3; : : :; sin embargo tambien incluiremos el caso n = 1, lo cual signi ca que en nuestro estudio estaremos considerando el caso de las funciones de una sola variable. En realidad en nuestro primer curso de calculo, nuestro estudio sobre R no se limito a considerarlo como mero conjunto, sino que estudiamos sus propiedades relacionadas con las operaciones algebraicas (propiedades de campo), con desigualdades (propiedades de orden) y las relacionadas con la convergencia que involucraban al supremo e n mo (propiedades de continuidad). Ahora haremos lo correspondiente para Rn .
18
re ere a las propiedades de las operaciones +, -, y entre los numeros reales. Estas operaciones no requirieron de nicion dado que se supon a un conocimiento de ellas, el cual obtuvimos desde nuestros cursos elementales de aritmetica. Sin embargo, ahora los elementos de Rn son nuevos entes: n-adas ordenadas (x1; x2; : : :; xn) En este caso tenemos un conjunto puro, carente de operaciones, por lo que sera necesario de nirlas para darle esa estructura algebraica que necesitamos. Esto lo haremos a continuacion. De nicion 2. Sean x = (x1 ; x2; : : :; xn); y = (y1 ; y2; : : :; yn ) elementos cualesquiera de Rn . De nimos x + y como el elemento de Rn dado por x + y = (x1 + y1 ; x2 + y2 ; : : :; xn + yn): Este elemento lo denominaremos la de x y y. Por otra parte, si cualquiera, de nimos x como el elemento de Rn dado por es un real
2.2. El espacio vectorial Rn. El estudio de la estructura algebraica de R, se
x = ( x1; x2; : : :; xn); el cual se obtiene multiplicando cada entrada de x por . Para el caso particular = 1, (x1 ; x2; : : :; xn) lo escribiremos simplemente como (x1 ; x2; : : :; xn). Nota. Observese que no hemos de nido el producto de dos elementos de Rn, es decir, la multiplicacion de dos n-adas. Ejemplo 1. En R3 tenemos i) (1; 1; 0) + (2; 1; 2) = (3; 0; 2) ii) 2(1:5; 3; 4 ) = (3; 6; 8 ) 5 5 iii) ( 1)(6; 0; 4) = (6; 0; 4) = ( 6; 0; 4) Las propiedades basicas de estas operaciones las resumimos en la siguiente proposicion, de las cuales demostraremos solamente algunas de ellas, la prueba de las restantes se deja como ejercicio para el lector. Cabe aclarar, sin embargo, que algunas de estas propiedades son demasiado evidentes, por lo que seguramente usted se podra preguntar porque se insiste en incluirlas. La razon de organizarlas y presentarlas en bloque, obedece al hecho de que en el futuro cualquier propiedad 19
algebraica en relacion a estas operaciones podra ser deducida de las que aparecen en la proposicion por lo que no sera necesario recordar como fueron de nidas las operaciones. Este es el verdadero esp ritu del estudio de toda estructura axiomatica. Observe por ejemplo, que el hecho evidente 0 x = no aparece en la lista. Si bien es cierto que es un hecho que se deduce inmediatamente de la de nicion de la multiplicacion por escalares, el que no este inclu da en la lista signi ca que es posible deducirla de la proposicion, aun cuando ignoraramos como esta de nida la multiplicacion por escalares.
Proposicion 1. Sean (x ; x ; : : :; xn), (y ; y ; : : :; yn) y (z ; z ; : : :; zn) elementos1 2 1 2 1 2
cualesquiera de Rn y sea = (0; 0; : : :; 0) el elemento de Rn cuyas entradas son todas cero. Entonces se tiene 1. x + (y + x) = (x + y) + z 2. x + = + x = x 3. x + ( x) = ( x) + x = 4. x + y = y + x 5. 1 x = x 6. ( )x = ( x) para cualesquiera , 2 R 7. (x + y) = x + y para cualquier 2 R 8. ( + )x = x + x para cualesquiera , 2 R.
Demostracion.Prueba de (1): x + (y + z) = (x1 ; x2; : : :; xn) + ((y1 ; y2 ; : : :; yn ) + (z1 ; z2; : : :; zn)) = (x1 ; x2; : : :; xn) + (y1 + z1 ; y2 ; +z2 ; : : :; yn + zn ) = (x1 + (y1 + z1 ); x2 + (y2 + z2 ); : : :; xn + (yn + zn)) = ((x1 + y1 ) + z1 ; (x2 + y2 ) + z2 ; : : :; (xn + yn ) + zn ) = (x + y) + z 20
Prueba de (3). x + ( x) = (x1 ; x2; : : :; xn) + ( 1)(x1 ; x2; : : :; xn) = (x1 ; x2; : : :; xn) + ( x1 ; x2; : : :; xn) = (x1 x1 ; x2 x2 ; : : :; xn xn) = (0; 0; : : :; 0) = Las propiedades que aparecen en la proposicion anterior corresponden a lo que se llama un , por lo que nos referiremos a Rn de esa manera.
Problemas y Ejercicios.
1. Pruebe las propiedades no demostradas en la proposicion 1.
2.3. Espacios Vectoriales Abstractos. Para comprender mejor lo que se preDe nicion 3. Un es cualquier conjunto V acompa~ado de dos operaciones: n i) : para cualesquiera x, y 2V hay de nido un elemento x + y 2V ii) : para cualesquiera x 2V y 2 R, hay de nido un elemento x 2V.
tende con la proposicion 1 de la seccion anterior, revisaremos el concepto de Espacio Vectorial abstracto.
Estas operaciones deben satisfacer las siguientes propiedades: 1. x + (y + z) = (x + y) + z para cualesquiera elementos x, y, z de V 2. Existe un elemento en V tal que x + = + x = x para todo elemento x 2V 3. Para cada elemento x de V existe un elemento w de V tal que x+w = w+x = 4. x + y = y + x para cualesquiera elementos x; y 2V 5. 1 x = x para toda x 2V 6. ( )x = ( x) para toda x 2V y cualesquiera ; 2 R 7. (x + y) = x + y para cualesquiera x; y 2V y toda 2 R 8. ( + )x = x + x para cualesquiera ; 2 R y toda x 2V
La teor a sobre espacios vectoriales consiste en obtener la maxima informacion sobre el espacio a partir de las 8 propiedades listadas, sin tener que particularizar el conjunto V y obviamente sin necesidad de explicitar las de niciones de la suma 21
vectorial y multiplicacion por escalares (lo cual es imposible hacerlo si no se tiene un conjunto V espec co), estas propiedades se denominan . Los elementos del conjunto V pueden ser de cualquier naturaleza, el caso en el que estamos interesados, V es Rn, cuyos elementos son n-adas ordenadas de numeros reales, pero los elementos de un espacio vectorial V pueden ser, por ejemplo, funciones, polinomios, sucesiones, etc., etc. En cualquiera de los casos, para referirnos a los elementos de un espacio vectorial V usaremos el termino generico , independientemente de su naturaleza, entonces valdra decir que un polinomio es un vector cuando se considere como elemento de un espacio vectorial. denominaremos y lo denotaremos por cualquier letra con una echa sobrepuesta, por ejemplo x, ~ , ~. ~ a r Se sigue de la proposicion 1, que Rn con las operaciones dadas en la de nicion 2 es un espacio vectorial. Sus elementos (x1; x2; : : :; xn) seran denotados por ~ y se x les denomina vectores.
De nicion 4. Si V es cualquier espacio vectorial, a cada uno de sus elementos lo
22
Problemas y Ejercicios.
1. Pruebe que en todo espacio vectorial V 0~ = ~ x 0
para todo vector ~ 2 V. x 2. Sea V el conjunto de todos los polinomios, es decir, polinomios de todos los grados posibles, con coe cientes reales. Considere la suma vectorial y la multiplicacion por escalares de nidas como la suma usual entre polinomios y la multiplicacion usual de un polinomio por un real. Estas operaciones las recordamos a continuacion: i) Sean p(x) = anxn + + a1x + a0 y q(x) = bm xm + + b1 x + b0 dos polinomios de grados n y m respectivamente. Si los polinomios son de grados diferentes, completamos a uno de ellos con terminos en cero para poder escribir ambos como p(x) = ak xk + q(x) = bk xk + + a1x + a0 + b1 x + b0
donde k = maxfm; ng. Entonces se tiene por de nicion (p + q)(x) = (ak + bk )xk + + (a1 + b1)x + (a0 + b0 ) ii) Si p(x) = an xn + + a1 x + a0 es un polinomio y es un real, ambos cualesquiera, entonces ( p)(x) = ( an )xn + + ( a1 )x + ( a0 ): Pruebe que V acompa~ado de estas operaciones es un espacio vectorial. n 3. Sea V el conjunto de todas la funciones continuas f : 0; 1] ! R. Para f; g 2V y 2 R de nimos f + g y f como sigue (f + g)(x) = f(x) + g(x) ( f)(x) = f(x) Estas son las operaciones usuales entre funciones. Pruebe que V es un espacio vectorial. 23
4. Sea V el conjunto de reales positivos R+ . De namos en V la operacion suma como a b = ab: Si a es un elemento de V, es decir un real positivo y es cualquier otro real, es decir 2 R, de nimos el producto a como a=a : Pruebe que R+ acompa~ado de estas dos operaciones es un espacio vectorial. n >Cual es el elemento neutro 2V?. >Cual es el \negativo" de un elemento a 2 V?. 5. Sea V el conjunto de todas las sucesiones de reales x ~ = (x1 ; x2; x3; : : :) Consideremos la suma usual entre sucesiones y la multiplicacion de una sucesion por un real como las operaciones suma vectorial y multiplicacion por escalares respectivamente, es decir, si ~ = (x1 ; x2; x3; : : :) y ~ = (y1 ; y2 ; y3; : : :) x y son dos elementos de V y es un real cualquiera, entonces ~ + ~ y ~ estan x y x de nidas como ~ + ~ = (x1 + y1 ; x2 + y2 ; x3 + y3 ; : : :) x y ~ = ( x1 ; x2; x3; : : :) x Pruebe que V, junto con estas dos operaciones es un espacio vectorial. 6. Considere el conjunto W constitu do por las sucesiones de reales x ~ = (x1 ; x2; x3; : : :) convergentes a cero, es decir lim x = 0 n!1 n
y considere las operaciones de nidas de la misma manera que en el ejercicio 3. Pruebe que W es un espacio vectorial. 24
7. Cuadrados Magicos. Una matriz 3 3
0a @a
11 21
a331
a12 a13 a22 a23 A a32 a33
1
se dice que es un , si la suma de los elementos de cualquier renglon, columna o diagonal es una constante. Los siguientes son ejemplos de cuadrados magicos
01 1 11 @1 1 1A;1 1 1
00 1 @ 1 01
2 7 6 Consideremos la suma entre cuadrados magicos y la multiplicacion de un cuadrado magico como las operaciones para matrices (de hecho un cuadrado magico es una matriz). Pruebe que el conjunto de cuadrados magicos junto con estas operaciones constituye un espacio vectorial. Escriba el cuadrado magico 04 3 81 @9 5 1A 2 7 6 en la forma
04 3 81 @9 5 1A:
1 0 A; 1 0
1
0 1 1 @1 00
0 1A; 1 1
1
01 1 11 0 0 1 @1 1 1A+ @ 1 01 1 1 1
1 0 A+ 1 0
1
0 1 1 @1 00
0 1A: 1 1
1
25
2.4. Interpretacion geometrica en R y R . Las de niciones que hemos es2 3
tablecido para la suma vectorial y multiplicacion por escalares en Rn han sido puramente algebraicas, carente de signi cado f sico o geometrico para el caso general, sin embargo para los casos particulares de R2 y R3 es posible hacer tal interpretacion. Veamos primero el caso n = 2: R2 = f (x; y) j x; y 2 R g Si consideramos el plano f sico P con un sistema de ejes cartesianos x; y de referencia
podemos asociar a cada punto del plano una pareja ordenada de reales (x; y), como siempre lo hemos hecho desde nuestros cursos de geometr a anal tica elemental. Rec procamente, a cada pareja de reales (x; y) podemos asociarle un punto del plano f sico. De este modo, tenemos una identi cacion entre los puntos del plano P y los elementos de R2, que son parejas ordenadas de reales (x; y). En este sentido R2 es una representacion algebraica del Plano P , vale decir que un punto P del plano P tiene coordenadas (x; y) (respecto al sistema de referencia elegido). Veamos ahora como se traducen las operaciones algebraicas de R2 en el plano P ; para ello sera util introducir un elemento geometrico, que es el de (tambien denominado ). Sea P un punto de P de coordenadas (x; y), consideremos el segmento de recta dirigido con extremo inicial el origen O del sistema y extremo nal el punto P. Que sea un segmento de recta dirigido signi ca que sus extremos O y P se diferenc an uno del otro; a uno lo denominamos extremo inicial y al otro nal, digamos que el segmento \va de un extremo a otro", geometricamente los distinguimos colocando en el extremo nal una punta de echa, como se muestra en la gura 2 26
! Denotaremos a este segmento de recta dirigido por OP o simplemente por !. P Si P tiene coordenadas (x; y), valdra escribirP = (x; y) o bien
! = (x; y) P
! ! Sean P1 = (x1; y1 ) y P2 = (x2; y2 ). En las siguientes guras podemos observar las relaciones geometricas entre los segmentos dirigidos correspondientes a los vectores (x1 ; y1); (x2; y2 ) y (x1 + y1 ; x2 + y2 ) en R2
27
El segmento dirigido ! asociado a la pareja (x1 + y1 ; x2 + y2 ) se puede consP ! truir trasladando paralelamente el segmento P2 a una posicion en donde su origen ! coincida con el extremo nal de P1. Esta con guracion de los segmentos determina un nuevo punto del plano y por lo tanto un nuevo segmento dirigido ! que P corresponde precisamente a la suma (x1 + y1 ; x2 + y2 ).
La construccion anterior se denomina la , pues el vector ! resulta ser una de P ! ! las diagonales del paralelogramo cuyos dos de sus lados son los segmentos P1 y P2.
28
Interpretemos ahora la Multiplicacion por Escalares. Sea (x; y) 2 R2 y ! el P segmento dirigido asociado como se muestra en la siguiente gura. Consideremos tambien 2(x; y) = (2x; 2y) y su segmento dirigido asociado
Observemos que el segmento dirigido asociado a (2x; 2y), el cual denotamos por !, tiene una magnitud que es igual al doble de la del segmento ! (esto se Q P deduce de uno de los criterios de semejanza para triangulos de la geometr a elemental euclidiana). As pues, el segmento dirigido asociado a 2(x; y) = (2x; 2y) tiene la misma direccion y sentido del segmento asociado a (x; y), pero el doble de magnitud. Es facil intuir que un resultado analogo ocurre para el segmento asociado a 3(x; y) = (3x; 3y), solo que en este caso la magnitud queda multiplicada por 3. En general, el segmento asociado a (x; y) = ( x; y) para > 0, es otro segmento con la misma direccion y sentido, pero cuya longitud es veces la longitud del segmento asociado a (x; y). Si = 0, no se genera ningun nuevo segmento, pues en este caso se tiene 0 (x; y) = (0; 0) el cual no tiene asociado ningun segmento dirigido. Si = 1, tenemos entonces ( 1) (x; y) = ( x; y)
29
De la gura anterior podemos observar que el segmento asociado a la pareja ordenada (x; y) = ( x; y) tiene la misma direccion pero de sentido opuesto al del segmento asociado a (x; y), la magnitud es la misma. Si es un real negativo cualquiera, es facil intuir que (x; y) = ( x; y) determina un segmento con la misma direccion, sentido opuesto y cuya magnitud es j j veces la magnitud del segmento asociado a (x; y). Con esto terminamos la discusion en R2 . Para R3 la situacion es completamente analoga. En este caso consideramos el espacio f sico tridimensional E , en donde tenemos establecido un sistema de referencia de tres ejes cartesianos
Cualquier punto del espacio E lo identi camos ahora con una terna ordenada de reales (x; y; z) y viceversa. En este caso los segmentos dirigidos se encuentran en el espacio
En el plano, un sistema de ejes cartesianos lo divide en , mientras que en el espacio el sistema de tres ejes lo divide en que son 8 regiones que podr amos denominar, por ejemplo, \octante anterior superior derecho". Otro ser a \octante posterior superior izquierdo", etc. En el espacio se tiene la correspondiente , solo que en este caso se construye un paralelogramo con segmentos en el espacio tridimensional. Por su parte la multiplicacion por escalares tiene su interpretacion completamente similar a la ya vista en el plano. 30
Problemas y Ejercicios.1. Liste los nombres de cada uno de los octantes que determina un sistema de tres ejes cartesianos en el espacio tridimensional. 2. Dibuje un sistema de tres ejes cartesianos tomando como unidad 0.5 cm. en cada uno de los tres ejes. Trace lo vectores (segmentos dirigidos) que se indican a continuacion. Para los tres primeros incisos utilice un sistema de referencia y para los dos restantes haga un dibujo por separado. a) (3; 2; 1) b) (1; 3; 2) c) (3; 2; 1) + 2(1; 3; 2) d) ( 1; 2; 4) e) ( 1; 2; 4) 3. Que restricciones deben hacerse sobre x, y y z para que la terna (x; y; z) se encuentre a) sobre el eje x b) sobre el eje y c) sobre el eje z d) sobre el plano xy e) sobre el plano xz f) sobre el plano yz g) sobre el octante posterior-superior-izquierdo h) sobre el octante posterior-inferior-derecho i) sobre el octante anterior-inferior-izquierdo 4. Dibuje los vectores ~ = (1; 2; 3), ~ = (2; 1; 3), w = (3; 2; 1), as como el vector u v ~ ~ w. u ~ 5. En cada uno de los siguientes casos calcule x, y y z, segun se indique a) ( 1; 4; 5) + (2; 4; 3) = (x; y; z) b) (7; y; 9 + z) + (x; 4; 3) = (2; 1; x) c) (a; 4b; d 5) + (x; z 4; x + y) = (0; y; c) 31
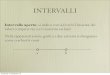
2.5. Rectas en el plano y en el espacio. Respecto a un sistema de ejes carte-
sianos x; y, una recta en el plano puede representarse algebraicamente por una expresion de la forma ax + by = c la cual es conocida como de la recta. Esta ecuacion establece una relacion entre las coordenadas de los puntos (x; y) que se encuentran sobre la recta.
Otra representacion algebraica de la recta se obtiene mediante su ecuacion parametrica, la cual obtendremos a continuacion. En la seccion 4 interpretamos geometricamente la suma ~ + ~ de dos vectores a b ~ y ~ de R2. Este es un caso particular de las sumas de la forma ~ + t~ donde t es a b a b un numero real.
32
Haciendo variar t sobre todos los numeros reales, se obtienen puntos ~ + t~ a b sobre una recta L. La expresion L(t) = ~ + t~ a b se denomina la de la recta L. Esta recta pasa por el punto ~ y observe que es a ~ (el punto ~ se obtiene con t = 0). Explicitando los vectores paralela al vector b a ~ = (b1; b2) obtenemos ~ = (a1 ; a2) y b a o sea L(t) = (a1 ; a2) + t(b1; b2);
L(t) = (a1 + tb1; a2 + tb2) Esta expresion indica como son las coordenada de los puntos sobre la recta. Tambien se vale escribir x = a1 + tb1 y = a2 + tb2 y son referidas como las de la recta L. Conviene sin embargo manejar estas ecuaciones en una sola relacion breve L(t) = ~ + t~ , ambas maneras son formas algea b braicas equivalentes de representar a la recta. Haciendo t = 0 se obtiene el punto ~ ; con t = 1 se obtiene el punto ~ + ~. a a b
Podemos imaginar la situacion como si trasladaramos los numeros de la recta real a la recta L, donde el cero se ubica en ~ y el 1 en ~ + ~ . En general el real t se a a b ~ , >donde se ubican los reales negativos?. ubica en el punto ~ + tb a 33
Ejemplo 2. La ecuacion parametrica que pasa por el punto ~ = ( 1; 2) y que es aparalela al vector ~ = (1; 1) es L(t) = ( 1; 2) + t(1; 1), o sea b L(t) = ( 1 + t; 2 + t)
Tambien podemos describir la recta como x= 1+t y = 2+t Para obtener la ecuacion parametrica de una recta, de la cual sabemos que pasa por dos puntos dados ~ = (p1 ; p2) y ~ = (q1 ; q2), conviene tener una interpretacion p q geometrica de la diferencia de dos vectores. Sean ~ y ~ dos vectores en R2. El vector ~ que satisface la ecuacion a b x ~ +~ =~ a x b es el vector diferencia ~ ~ . Para determinarlo geometricamente, observemos que b a ~ debe ser un vector tal, que cuando se traslade paralelamente, segun la Regla del x Paralelogramo, debe darnos ~ . b
34
Esto signi ca que el vector ~ es paralelo al segmento dirigido que va del extremo x nal de ~ al extremo nal de ~ , de este modo obtenemos geometricamente el vector a b diferencia
En la gura anterior hemos identi cado el segmento mismo que une los extremos nales de ~ y ~ con el vector diferencia ~ ~ . En terminos estrictos el vector a b b a ~ ~ se obtiene trasladando al origen dicho segmento. b a
35
Supongase ahora que se desea la ecuacion parametrica de la recta que pasa por dos puntos dados ~ y ~. Esta recta tiene la direccion del vector ~ ~ p q q p
as que se trata de la recta que pasa por el punto p y es paralela al vector ~ p, por ~ q ~ lo tanto su ecuacion estara dada por L(t) = p + t(~ ~): ~ q p Para veri car que se trata de la ecuacion deseada, basta observar que con t = 0 se obtiene el punto ~ p L(0) = p + 0(~ ~) = ~; ~ q p p y haciendo t = 1 se obtiene el punto ~ q L(1) = ~ + 1(~ ~) = ~: p q p q De la ecuaciones parametricas de una recta x = a1 + tb1 y = a2 + tb2 podemos obtener su ecuacion cartesiana despejando t de una de las relaciones y sustituyendola en la otra. Por ejemplo, si b1 6= 0, t = x b a1 1 por lo tanto y = a2 + b2 x b a1 ;1
36
o sea
Para el caso de las rectas en el espacio tridimensional, el tratamiento es completamente similar: si ~ = (a1 ; a2; a3) y ~ = (b1 ; b2; b3) son dos vectores en R3, la de la recta que pasa a b por el punto ~ y es paralela al vector ~ esta dada por a b L(t) = ~ + t~; a b o sea t 2 R;
y = b2 (x a1 ) + a2: b1
L(t) = (a1 + tb1 ; a2 + tb2; a3 + tb3): Esta ecuacion tambien se puede escribir en la forma x = a1 + tb1 y = a2 + tb2 z = a3 + tb3
que se denominan de la recta. A la variable t se le llama y toma valores sobre todos los numeros reales.
La ecuacion de la recta en el espacio tridimensional que pasa por dos puntos dados ~ = (p1 ; p2; p3) y ~ = (q1; q2; q3) esta dada por p q L(t) = p + t(~ ~) ~ q p que tambien escribimos L(t) = t~ + (1 t)~: q p 37
Ejemplo 3. La ecuacion de la recta que pasa por los puntos ~ = (1; 3; 2) y pq ~ = (2; 5; 1), esta dada por L(t) = (1; 3; 2) + t (2; 5; 1) (1; 3; 2)] = (1; 3; 2) + t(1; 2; 1)
o sea
L(t) = (1 + t; 3 + 2t; 2 t) Tambien podemos escribir esta ecuacion como x= 1+t y = 3 + 2t z=2 t Como caso especial tenemos las rectas que pasan por el origen del sistema de ejes. Los puntos sobre estas rectas no son otra cosa que los multiplos de un vector, as que su ecuacion es de la forma L(t) = t~ = (tb1 ; tb2; tb3). b Para nalizar esta seccion mencionaremos que algunos libros de texto tambien se re eren a la ecuacion cartesiana de una recta en el espacio tridimensional. Esta se obtiene al despejar el parametro t de la ecuaciones parametricas x = a1 + tb1 y = a2 + tb2 z = a3 + tb3 t = x b a1 1 y a2 t= b 2 z a3 t= b3
y construyendo la cadena de igualdades x a1 = y a2 = z a3 b1 b2 b3 denominando a esta expresion como la \ecuacion cartesiana". Esto es poco popular debido seguramente a los dos signos de igualdad. Nosotros no las utilizaremos. 38
2.6. Planos en el espacio. Con el mismo tipo de ideas de la seccion anterior
podemos describir los planos en el espacio tridimensional. Considererese primero un par de vectores ~ y ~ en el espacio. a b
Estos vectores \generan" un plano, de nido por las rectas que se obtienen al prolongarlos. Los multiplos s~ del vector ~ generan una recta La , mientras que los a a multiplos t~ del vector ~ generan otra recta Lb , ambas rectas pasan por origen. La b b suma de los multiplos s~ +t~ es un vector que se encuentra precisamente en el plano a b P de nido por las dos rectas La y Lb. Este plano contiene al origen y se dice que es por los vectores ~ y ~ y su esta dada por a b P (s; t) = s~ + t~ ; a b s; t 2 R
En la gura anterior se encuentra sombreado solamente un sector de este plano. 39
Ahora obtendremos la ecuacion de un plano en general, que puede o no pasar por el origen. Dado que un plano que no contiene al origen O, lo podemos obtener trasladando paralelamente otro que pase por ese punto O, concluimos que la del ~ a ~ y que pasa por el punto ~ esta dado por yb p P(s; t) = p + s~ + t~ ; ~ a b s; t 2 R
Explicitando las coordenadas de los vectores p, ~ y ~ obtenemos que la ecuacion ~a b del plano es P (s; t) = (p1 + sa1 + b1; p2 + sa2 + tb2; p3 + sa3 + tb3) donde ~ = (p1; p2; p3), ~ = (a1 ; a2; a3), ~ = (b1; b2; b3) y s, t son parametros que p a b toman valores en todo R. Tambien se vale decir que el plano tiene las x = p1 + sa1 + tb1 y = p2 + sa2 + tb2 z = p3 + sa3 + tb3 Tomando dos de estas ecuaciones, resolviendolas para s y t y sustituyendo los valores obtenidos en la tercera restante, obtenemos la del plano, la cual tendra la forma ax + by + cz = d: 40
Por ejemplo, si de las dos primeras ecuaciones despejamos s y t en terminos de las variables x; y y substitu mos los valores obtenidos en la ultima de las ecuaciones, obtenemos una relacion de la forma z = Ax + By + C:
Ejemplo 4. La ecuacion parametrica del plano que pasa por el punto p = (3; 1; 2) ~y es paralelo a los vectores ~ = ( 1; 1; 0) y ~ = (1; 2; 1), esta dado por a b P (s; t) = ~ + s~ + t~ p a b = (3; 1; 2) + s( 1; 1; 0) + t(1; 2; 1) = (3 s + t; 1 + s + 2t; 2 t); que tambien podemos escribir como x=3 s+t y = 1 + s + 2t z = 2 t: La ecuacion cartesiana la obtenemos despejando s y t de la primera y tercera ecuaciones: t=2 z s = 3+2 z x= 5 z x y sustituyendo sus valores en la segunda ecuacion, para obtener nalmente y = 1 + 5 z x + 2(2 z) x + y + 3z = 10: Si tenemos dados tres puntos de un plano ~ , ~ y w, para obtener su ecuacion u v ~ basta establecer p u ~=~ ~ =~ ~ a v u ~=w ~ b ~ u y considerarlo como el plano que pasa por ~ y es paralelo a los vectores ~ y ~. p a b 41 o sea
Para nalizar esta leccion veamos lo que se adopta como una representacion estandar de los vectores en R3. Si ~ = (x; y; z) es un vector cualquiera de R3, v entonces es claro que podemos escribir (x; y; z) = x(1; 0; 0) + y(0; 1; 0) + z(0; 0; 1): El conjunto de vectores (1; 0; 0), (0; 1; 0) y (0; 0; 1) recibe el nombre de de R3 y cada uno de ellos se denota de manera especial: ^ = (1; 0; 0) { | = (0; 1; 0) ^ ^ k = (0; 0; 1) Con esta notacion podemos escribir ~ = x^ + y^ + z k v { | ^ { ^ ^ para todo vector ~ = (x; y; z) 2 R3. A los vectores ^, | y k se les llama debido a la v propiedad de que todo vector de R3 se puede representar en la forma anterior. En general el conjunto de vectores en Rn e1 = (1; 0; : : :; 0) ^ e2 = (0; 1; : : :; 0) ^ . . . en = (0; 0; : : :; 1) ^ donde cada una de las entradas de ei son cero, excepto la i-esima que vale 1, se ^ denomina n . Si ~ = (x1; x2; : : :; xn) es un vector cualquiera en Rn , entonces podemos escribir x x ~ = (x1 ; x2; : : :; xn) = x1 (1; ; 0; : ::; 0) + x2(0; 1; : : :; 0) + xn (0; 0; : : :; 1) es decir ~ = x1e1 + x2e2 + + xn en : x ^ ^ ^ 5 Por ejemplo el vector ~ = (2; 4; 5; 1; 0) en R se escribe como x x e ~ = 2^1 4^2 + 5^3 + e4 e e ^ 42
Problemas y Ejercicios.
1. En cada uno de los siguientes casos halle la ecuacion parametrica de la recta generada por el vector indicado y trace la recta en el espacio tridimensional. a) ~ = (1; 3; 5) v b) ~ = (2; 1; 1) v c) ~ = ( 1; 1; 2) v d) ~ = 4^ + 2^ + k v { | ^ e) ~ = ^ 2^ 3k v { | ^ 2. En cada uno de los siguientes casos halle la ecuacion parametrica del plano generado por los vectores indicados. a) ~ = (3; 2; 0) y w = (2; 0; 3) u ~ b) ~ = (1; 0; 1) y w = (0; 1; 1) u ~ c) ~ = (4; 4; 0) y w = (0; 0; 1) u ~ d) ~ = ^ + k y w = ^ + k v j ^ ~ j ^ e) ~ = ^ + ^ y w = ^ + k v i j ~ j ^ 3. Halle las ecuaciones cartesianas de los planos del ejercicio 2. 4. En cada uno de los siguientes casos determine la ecuacion parametrica de la recta que pasa por el punto ~ y en la direccion del vector ~ indicados. a v a) ~ = (1; 1; 1), ~ = ^ ^ a v i j b) ~ = (0; 1; 1), ~ = ^ k a v j ^ c) ~ = (0; 1; 1), ~ = ^ ^ k a v i j ^ 5. En cada uno de los siguientes casos halle la ecuacion parametrica del plano que pasa por el punto ~ y que es paralelo al plano generado por los vectores ~ y w. a v ~ a) ~ = (1; 2; 0), ~ = ^ + | y w = ^ + k a v { ^ ~ { ^ b) ~ = (1; 1; 1), ~ = ^ + | y w = ^ | k a v { ^ ~ { ^ ^ c) ~ = (0; 1; 1), ~ = ^ | y w = | + k a v { ^ ~ ^ ^ 6. Halle las ecuaciones cartesianas de los planos del problema 5. 43
7. Encuentre los puntos de interseccion con los planos coordenados de la recta cuyas ecuaciones parametricas son x(t) = 1 + 3t y(t) = 2 t z(t) = 4 + 5t 8. Encuentre los puntos de interseccion con los planos coordenados de la recta dada por L(t) = (2 t; 1 + t; 3 + 2t). 9. Halle las ecuaciones de las rectas que son la interseccion con los planos coordenados del plano cuya representacion parametrica es P(s; t) = (2 + t s; 1 2t + 3s; 2 + 3t + 4s) 10. Halle las ecuaciones de las rectas que son la interseccion con los planos coordenados del plano cuya ecuacion cartesiana es 5x + 3y z = 4 11. Halle la interseccion del plano cuya ecuacion cartesiana es x 2y + 4z = 2 con la recta cuyas ecuaciones parametricas son x=1 t y = 2 + 5t z = 1 + 3t 12. Halle la interseccion del plano cuyas ecuaciones parametricas son x =2+t s y = 3 2t + 5s z = 1 + 4t 3s con la recta cuya representacion parametrica es L(t) = (t; 2 + 6t; 4 3t) 13. Halle las ecuaciones cartesianas y parametricas del plano que contiene a los puntos ~ = (3; 1; 4), ~ = (0; 2; 5) y ~ = (1; 5; 2). a b c 44
Leccion 3El espacio normado Rn
Calculo y del Analisis Matematico es el de o . Este concepto es lo que permite de nir las diversas nociones de l mite o convergencia. Por ejemplo, l mite de una funcion en un punto, l mite de una sucesion de numeros, l mite de una sucesion de funciones. En Rn la nocion de metrica depende a su vez del concepto de , por lo cual comenzaremos con ello. La o de un vector ~ = (x; y) en R2 es la longitud del segmento de recta que v une los puntos O = (0; 0) y P = (x; y). Sabemos, por el Teorema de Pitagoras de nuestro curso de geometr a elemental euclidiana, que esta longitud esta dada p por x2 + y2 . Este numero no negativo lo denominamos la del vector ~ = OP. v ~ En el espacio tridemensional tambien es facil ver que la longitud del segmento que une los puntos O = (0; 0; 0) y P = (x; y; z) esta dado por la expresion similar p2 2 2 x + y + z . Ahora extenderemos esta relacion al caso Rn, la cual adoptaremos como de nicion de norma de un vector. x De nicion 1. Si ~ = (xpx ; : : :; xn) es un elemento de Rn , de nimos la de ~ x ; como el real no negativo x2 + x2 + 1 2 los s mbolos k~ k o N (~ ) , es decir x x1 2
3.1. La Norma Euclidiana en Rn . Uno de los conceptos mas importantes del
+ x2 que denotaremos por cualquiera de n
k~ k = N (~ ) = x2 + x2 + : : : + x2 x x n 1 245
q
Tenemos de nida una funcion k k : Rn ! R que denominamos la , la cual asigna a cada vector ~ en Rn un real k~ k. x x En la proposicion de abajo establecemos las propiedades mas importantes de la norma euclidiana. Para su prueba necesitaremos de lo que se conoce como Desigualdad de Cauchy y Schwarz, la cual enunciamos y probamos a continuacion.
Lema 1 (Desigualdad de Cauchy-Schwarz). Sean ~ = (x ; x ; : : :; xn) y xy ~ = (y1 ; y2 ; : : :; yn) elementos de Rn , entonces1 2
jx1 y1 + x2y2 +
+ xn yn j
q
2 2 2 x2 + x2 + : : : + x2 y1 + y2 + : : : + yn 1 2 n
q
Demostracion. Probemos la desigualdadjx1j jy1 j ++ jxn jjyn j
q
2 2 2 x2 + x2 + : : : + x2 y1 + y2 + : : : + yn n 1 2
q
la cual implicara la desigualdad deseada ya que
jx1y1 + x2y2 +
+ xn yn j jx1j jy1j + x2j jy2j +
+ jxnj jynj
Si alguno de los vectores ~ o ~ es ~ , entonces la desigualdad se cumple trivialmente, x y 0 pues en este caso ambos miembros valen cero. El caso interesante es cuando ambos vectores ~ y ~ son diferentes de ~ . x y 0 Supongamos entonces ~ 6= ~ y ~ 6= ~ y hagamos x 0 y 0 = x2 + x2 + : : : + x2 ; 1 2 n
q
2 2 2 = y1 + y2 + : : : + yn
q
Usando y , la desigualdad a probar se escribe
jx1jjy1j + jx2jjy2j +x1 y1 + x2 y2 + 46
+ jxnjjynj + xn yn
Como > 0 y > 0 esta desigualdad es equivalente a 1
probemos pues, la desigualdad escrita en la forma anterior (practicamente en este momento estamos iniciando la demostracion). Dado que para cualesquiera reales a y b se cumple 2 2 jabj a + b 2 se tiene entonces ~ 1 ~1 + x y x y + ~ n ~nx2 12 2 2 2 + y1 x2 + y2 2 2 + 2 2 2 2+ n
+ 22
x2 n2
+ 2 = 1+1 =1 2 2 Esto prueba el lema.
x2 +x2 + 1 2
x2
2 2 y1 +y2 +
+ n
y2
+ y2 2
n
2
|
Veamos ahora las propiedades de la norma euclidiana
Proposicion 1. Para cualesquiera vectores ~ , ~ en Rn y toda 2 R, se cumple x y 1) k~ k 0; k~ k = 0 x 0 2) k ~ k = j jk~ k x x 3) k~ + ~k k~ k + k~k x y x y 4) k~ k = 0 ) ~ = ~ x x 0 Demostracion.Prueba de (1): La propiedad k~ k 0, o sea x2 + x2 + : : : + x2 0 no es otra cosa que x 1 2 n la de nicion misma del s mbolo de la ra z cuadrada p que representa la \ra z positiva".
p
47
Prueba de (2): Se tiene
k ~ k = ( x1)2 + ( x2)2 + x2 2 1 2 2 2 2 2 2 2 1
p + ( xn) q = x + x + + xn q = (x + x + + xn) q p = x + x + + xn q2 2 2 2 2 1 2 2 2
2
= j j x2 + x2 + 1 2 = j j k~ k x
+ x2 n
Esto prueba (2). Note que hemos usado 2 = j j, consecuencia nuevamente del p hecho de que 2 debe ser mayor o igual que cero. Prueba de (3). Se tiene k~ + ~k = (x1 + y1 )2 + + (xn + yn )2 x y 2 2 = x2 + 2x1y1 + y1 + + x2 + 2xnyn + yn 1 n 2 = (x2 + + x2 ) + 2(x1 y1 + + xnyn ) + (y1 + 1 n = k~ k2 + 2(x1 y1 + + xnyn ) + k~k2 x y Aplicando la desigualdad de Cauchy-Schwarz x1 y1 + obtenemos es decir + xnyn k~ kk~k x y
p
2 + yn )
k~ + ~k k~ k2 + 2 k~ k k~k + k~k2 x y x x y y k~ + ~k2 (k~ k + k~k)2 x y x y k~ + ~k k~ k + k~k x y x y
de donde al extraer la ra z cuadrada de ambos miembros obtenemos nalmente que es lo que deseabamos probar. 48
Prueba de (4). Si k~ k = 0, se tiene entonces x
q
x2 + x2 + 1 2
+ x2 = 0; n
x2 + x2 + + x2 = 0: 1 2 n Pero siendo cada x2 mayor o igual que cero, se debe tener que x2 = 0 para i = i i 1; 2; : : :n, o sea xi = 0 para i = 1; 2; : : :; n. Esto signi ca que ~ = ~ . x 0 Con esto queda probada la proposicion 1. |
es decir
Nota 1. Usando la idea anterior se puede probar la llamada desigualdad de CauchySchwarz para integrales: si f y g son funciones continuas a; b] ! R, entonces
Zba
f(x)g(x)dx
Zba
f (x)dx2
! 21 Z ba
g (x)dx2
! 12
3.2. El concepto general de norma en Rn . Las propiedades de la normaeuclidiana vistas en la proposicion 1 las adoptaremos para de nir la nocion abstracta de norma:
De nicion 2. Una en Rn es cualquier funcion k k : Rn ! R que satisface las siguientes propiedades que denominaremos : para cualesquiera ~ ; ~ 2 Rn y toda xy 2 R se cumple i) k~ k 0; k~ k = 0 x 0 ii) k ~ k = j jk~ k x x iii) k~ + ~k k~ k + k~k x y x y iv) k~ k = 0 ) ~ = ~ x x 0Si hacemos una revision cuidadosa de la teor a desarrollada a lo largo del texto, podemos darnos cuenta p no es necesario manejar la expresion expl cita de la que norma euclidiana k~ k = x2 + x2 + : : : + x2 . Bastar a conocer solamente las prox 1 2 n piedades que aparecen en la proposicion 1, que son las mismas que constituyen la de nicion anterior. De esto deducimos que, durante el desarrollo de la teor a, 49
podemos prescindir de la de nicion misma de la norma euclidiana, siendo su ciente suponer validas las tan citadas propiedades. As que para nes teoricos es totalmente irrelevante como este de nida la norma euclidiana. Dicho de otro modo, si hubiesemos de nido de otra manera la norma euclidiana, todo ir a igual de bien, con tal de que se satisfaciesen los llamados axiomas de norma. Las propiedades importantes de la norma euclidiana se deducen de los axiomas (i)-(iv), por lo tanto estas mismas propiedades se valdran para normas en general. Por otra parte, todas las propiedades que valgan para normas en general valdran para la norma euclidiana, dado que tales propiedades se deduciran de (i)-(iv).
Proposicion 2. Para toda norma k k : Rn ! R se cumple 1) k ~ k = kxk para todo vector ~ 2 R. x x 2) j k~ k k~k j k~ ~k para cualesquiera vectores ~ ; ~ 2 Rn . x y x y xy Demostracion. El inciso (1) se sigue del axioma (ii), haciendo = 1.Probemos (2). Puesto que
k~ k = k~ ~ + ~k k~ ~k + k~k ; x x y y x y yse tiene
k~ k k~k k~ ~k : x y x y k~k k~ k k~ ~ k ; y x y x
Intercambiando los papeles de ~ y ~, obtenemos x y pero k~ ~ k = k~ ~ k, por lo tanto x y y x
k~k k~ k k~ ~k : y x x yCombinando las dos desigualdaddes, obtenemos nalmente
j k~ k k~k j k~ ~k x y x yEsto prueba la proposicion 2. 50
|
del axioma (ii) haciendo simplemente = 0. Esto signi ca que podemos omitir tal propiedad de (i), obteniendo de esta manera un conjunto de axiomas equivalente: i') k~ k 0 x ii) k ~ k = j jk~ k x x iii) k~ + ~k k~ k + k~k x y x y iv) k~ k = 0 ) ~ = ~ x x 0 No obstante que podemos prescindir de la condicion k~ k = 0, sin afectar el 0 contenido de los axiomas en conjunto, preferimos incluirla dentro de los axiomas de norma, dado lo socorrido de ella. Un conjunto de axiomas, donde una o varias propiedades se deducen de las restantes se dice que es . Un conjunto de axiomas redundante no provoca con icto logico alguno, solo suministra informacion no necesaria. haber de nido el concepto general de norma en Rn , debieramos disponer de otras normas ademas de la euclidiana. En esta seccion veremos dos normas muy interesantes. De namos k k1 : Rn ! R por
Nota 2. La condicion k~ k = 0 que aparece en el axioma (i) para normas, se deduce 0
3.3. Otras normas en Rn . Para que tenga sentido, y sobre todo, resulte util,
k~ k1 = jx1j + jx2j + xpara todo vector ~ = (x1 ; x2; : : :; xn) 2 Rn x
+ jxnj
Proposicion 3. La funcion k k : Rn ! R es una norma en Rn. Demostracion. Debemos veri car los axiomas (i), (ii), (iii) y (iv) para normas.1
Veri cacion de (i): Dado que para todo real x, jxj 0, se tiene
k~ k1 = jx1j + jx2j + xpara todo ~ = (x1 ; x2; : : :; xn) 2 Rn. x 51
+ jxnj 0
Veri cacion de (ii): Si es un real y ~ = (x1 ; x2; : : :; xn) 2 Rn, entonces x
k ~ k1 = j x =j =j =j
x1j + j x2j + + j xnj j jx1j + j j jx2j + + j j jxnj j (jx1j + jx2j + + jxnj) j k~ k1 x
Veri cacion de (iii): Si ~ = (x1; x2; : : :; xn) y ~ = (y1 ; y2; : : :; yn) son elementos cualesquiera de Rn, x y tenemos
k~ + ~k = jx1 + y1 j + jx2 + y2 j + jxn + yn j x y jx1j + jy1 j + jx2j + jy2 j + + jxnj + jyn j = (jx1j + jx2j + + jxnj) + (jy1 j + jy2j + + jynj) = k~ k1 + k~k1 x yVeri cacion de (iv): Supongase ~ = (x1 ; x2; : : :; xn) 2 Rn tal que x
k~ k1 = jx1j + jx2j + x
jxnj = 0:
Es claro entonces que jxij = 0 para i = 1; 2; : : :; n. Luego xi = 0 para i = 1; 2; : : :; n. Esto signi ca que ~ = ~ . x 0 | Nos referiremos a k k1 como a la . En R2 la norma 1 de un vector ~ del primer v cuadrante es la suma de sus coordenadas. Consideremos ahora la funcion k k1 : Rn ! R dada por
k~ k1 = max fjx1j; jx2j; : : :; jxnjg xpara todo vector ~ = (x1; x2; : : :; xn) 2 Rn . La notacion k~ k1 que puede parecernos x x un tanto extra~a obedece a razones que mas adelante explicaremos. n 52
o.
Proposicion 4. La funcion k k1 : Rn ! R es una norma en Rn, que se denomina
Demostracion. Veri quemos los axiomas (i)-(iv) para normas.Veri cacion de (i): Puesto que cada jxij es mayor o igual que cero, obviamente se tiene max fjx1j; jx2j; : : :; jxnjg 0; es decir k~ k1 0. x Veri cacion de (ii): Antes de proceder a veri car el segundo axioma, observemos que por de nicion max fa1 ; a2; : : :; ang es el mayor de los elementos a1 ; a2 ; : : :; an, por lo que necesariamente es uno de los elementos mismos. Supongase que ai es un elemento de valor maximo (puede haber varios), entonces diremos que max fa1; a2; : : :; ang se \realiza" en ai . Sea ahora 2 R y ~ 2 Rn . Se tiene entonces x k ~ k1 = max fj x1j; j x2j; : : :; j xnjg x = max fj j jx1j; j j jx2j; : : :; j j jxnjgo o
Mostremos que max fj j jx1j; j j jx2j; : : :; j j jxnjg = j j max fjx1j; jx2j; : : :; jxnjg Sea jxi j = max fjx1j; jx2j; : : :; jxnjg. Tenemos entonceso
jxi j jxijo
para i = 1; 2; : : :; n: para i = 1; 2; : : :; n: para i = 1; 2; : : :; n:
Luego Por lo tanto Esto signi ca que
j j jxi j j j jxijo
j xi j j xi jo o o
j j jxi j = j xi j = max fj x1j; j x2j; : : :; j xnjg;53
es decir
j j max fjx1j; jx2j; : : :; jxnjg = max fj j jx1j; j j jx2j; : : :; j j jxnjgEsto muestra que
z
xio
}|
{
j j k~ k1 = k ~ k1 x x
Veri cacion de (iii): Se tiene k~ + ~k1 = max fjx1 + y1 j; jx2 + y2 j; : : :; jxn + yn jg x y Supongase que max fjx1 + y1 j; jx2 + y2 j; : : :; jxn + yn jg se realiza en jxi + yi j, es deciro o
jxi + yi j = max fjx1 + y1 j; jx2 + y2j; : : :; jxn + yn jg:o o
Como se tiene
jxi + yi j jxi j + jyi j;o o o o o o
max fjx1 + y1 j; jx2 + y2 j; : : :; jxn + yn jg jxi j + jyi j; Pero, por de nicion de max fjx1j; jx2j; : : :; jxnjg y max fjy1 j; jy2 j; : : :; jynjg tambien se tiene
jxi j max fjx1j; jx2j; : : :; jxnjg jyi j max fjy1j; jy2j; : : :; jynjg;o o
luego max fjx1 + y1 j; jx2 + y2 j; : : :; jxn + yn jg max fjx1j; jx2j; : : :; jxnjg + max fjy1 j; jy2 j; : : :; jynjg; o sea
que es lo que deseabamos probar. La veri cacion de (iv) es facil y se deja como ejercicio para el lector. Con esto queda probada la proposicion 4. | 54
k~ + ~k1 k~ k1 + k~k1 x y x y
3.4 Norma de Minkowski en Rn . En el ejercicio 2, se dan los lineamientos paso a paso, de la prueba de que en general la funcion k kp : Rn ! R para p 1 (por pejemplo p = 1:5, p = 3, p = 5) dada por
k~ kp = kx1jp + x
+ jxnjp]
1
p
es una norma en Rn . Las normas euclidiana y k k1 resultan ser casos particulares de estas normas. La norma euclidiana se obtiene con p = 2, razon por la cual usaremos el s mbolo k k2 para denotarla. En lo sucesivo reservaremos el s mbolo k k (sin ndice) para representar cualquiera de las normas k k1 , k k2 o k k1 , es interesante observar que la teor a desarrollada a lo largo del texto sera valida si se provee Rn con cualquiera de estas normas, por lo que la mayor a de los resultados lo enunciaremos en terminos de la norma k k, la cual podra signi car cualquiera de la normas k k1 , k k2 o k k1 . De hecho, tambien podr amos hacer k k = k kp , para cualquier p 1. Para no pecar de ambiciosos, reservemos el s mbolo k k para representar solamente cualquiera de las tres normas k k1 , k k2 o k k1 . La norma k k1 no pertenece a la familia de normas k kp , puede probarse (ejercicio 3) quep!1
lim k~ kp = plim kx1jp + x !1
+ jxnjp ]
p
1
= max fjx1j; : : :; jxnjg
para toda ~ 2 Rn. Esta es la razon por la que adoptamos el s mbolo k k1 para x denotar al maximo de los elementos x1j; jx2j; : : :; jxnj. La convergencia de k~ kp a x k~ k1 la interpretaremos geometricamente mas adelante. x
55
Problemas y ejercicios.1. Pruebe la desigualdad de Cauchy-Schwarz para integrales: si f y g son funciones continuas a; b] ! R, entonces
Zba
f(x)g(x)dx
Zba
f (x)dx2
! 21 Z ba
g (x)dx2
! 12
2. En este problema se prueba que k kp , para p > 1 es una norma sobre Rn . Es un ejercicio facil la veri cacion de los axiomas (i), (ii) y (iv) para norma. Como siempre, el unico axioma que presenta alguna di cultad es la desigualdad del triangulo k~ + ~kp k~ kp + k~kp : x y x y Para el caso de la norma euclidiana (p = 2), esta se veri co usando la desigualdad de Cauchy-Schwarz, que se obtuvo a su vez de la desigualdad elemental2 2 jabj a + b ; 2
(*)
la cual vale para cualesquiera reales a y b. La prueba de la desigualdad del triangulo para k kp es totalmente similar; para ello vamos a requerir de una generalizacion de la desigualdad de CauchySchwarz, conocida como desigualdad de Holder, la cual se obtiene a su vez de una generalizacion de la desigualdad (*). La prueba la realizamos en tres etapas: i) Generalizacion de la desigualdad2 2 jabj a + b : 2
Sean p y q reales cualesquiera mayores que 1 tales que 1+1 =1 p q (por ejemplo, p = q = 2, o bien p = 3 y q = 3 ). Pruebe que para cualesquiera reales 2 a y b se tiene p q jabj japj + jbqj 56
Para su prueba considere la funcion f: 0; +1) ! R dada por f(x) = x + x + donde es un real en (0; 1) y muestre que alcanza un valor maximo en x = 1. Tome el caso particular = 1 y haga x = a . p b Observe que las siguientes relaciones son equivalentesp q
1 1 p+q =1 p+q = 1 pq p + q = pq p= q q 1 ii) Desigualdad de Holder. Sean p y q como en el inciso (i), pruebe quen X i=1 n X i=11 jxijp p
jxiyi j
n X i=1
jyijq
1 q
para cualesquiera vectores ~ = (x1 ; x2; : : :; xn) y ~ = (y1 ; y2; : : :; yn ) en Rn. x y Esta relacion generaliza la desigualdad de Cauchy-Schwarz y es conocida como , para su prueba separe el caso ~ 6= ~ 6= ~ y haga x 0 y = jx1jp + jx2jp + + jxnjp 1 = jy1 jq + jy2 jq + + jynjqq p
1
y
La desigualdad a probar se escribe entonces como x1 y1 + x2 y2 + + xn yn 1;
despues aplique las mismas ideas que para la prueba de la desigualdad de Cauchy-Schwarz, usando ahora la desigualdad del inciso (i). Escriba los detalles. 57
iii) Desigualdad de Minkowski. Pruebe la desigualdad del triangulo para k kp , donde p > 1, la cual en forma expl cita queda comon X i=1 n X i=1
jxi + yi jpn X i=1
p
1
n X
k=1
jxijp +p
1
n X
k=1
jyi jp
1 p
Esta relacion es conocida como , para su demostracion escriba
jxi + yi jp= =
jxij + jyi j]p jxij + jyi j]p 1 jxkj + jyk j] jxij + jyi j]p 1jxkj +n X i=1
n X n X i=1 i=1
jxij + jyi j]p 1jyk j
y aplique la desigualdad de Holder a cada una de las sumatorias del ultimo miembro, haciendo para la primera sumatoria ai = jxij y bi = jxij + jyi j]p 1 y para la segunda una eleccion analoga. La norma k kp la denominaremos . 3. Si p > 1, a) pruebe que
para todo vector ~ 2 Rn . x b) Deduzca del inciso (a) que para todo vector ~ 2 Rn . x c) Pruebe la desigualdad para todo vector ~ 2 Rn . x
k~ k1 k~ kp n 1 k~ k1 ; x x xp
p!1
lim k~ kp = k~ k1; x x
k~ k1 k~ kp k~ k1; x x x58
Leccion 4El Espacio Metrico Rn
4.1. La Metrica Euclidiana en Rn. Como ya hemos mencionado antes, el tener la nocion de distancia en R o mas generalmente en Rn , es lo que nos permite hablar de l mites o de convergencia. Cuando nos referimos a l mites, involucramos expresiones o ideas de aproximacion o acercamiento, lo cual lleva impl cito el manejo de distancia. Hay una nocion natural de distancia entre dos puntos en el mundo f sico, es la que corresponde a la longitud del segmento de recta que une los puntos. Esta no siempre es la mejor manera de medir distancias, despues de todo, la distancia entre dos puntos de la ciudad se mide a lo largo de las calles y no mediante el segmento de recta ideal que los une. La distancia entre dos puntos del globo terraqueo, se mide a lo largo de una curva y no mediante el segmento de recta que lo atraviesa por su interior. Estas diferentes maneras de medir distancias son leg timas tanto desde el punto de vista practico, como desde el punto de vista matematico, pues corresponden a la nocion general de distancia que se hace en matematicas.Consideremos nuevamente la nocion comun de distancia entre dos puntos del espacio tridimensional R3 dada por la longitud del segmento de recta que los une. Si ~ = (x1 ; x2; x3) y ~ = (y1 ; y2 ; y3) son dos puntos de R3 , entonces la distancia x y entre ~ y ~ esta dada por x y p k~ ~k2 = (x1 y1 )2 + (x2 y2 )2 + (x3 y3 )2 : x y Esta distancia la denominamos metrica euclidiana y la generalizamos a Rn en la siguiente de nicion 59
De nicion 1. Sean ~ = (x ; x ; : : :; xn) y ~ = (y ; y ; : : :; yn) elementos cualesx yquiera de Rn, de nimos la entre ellos como d2(~ ; ~) = k~ ~ k2 xy x y p = (x1 y1 )2 + (x2 y2 )2 + + (xn yn )2 La funcion d2 : Rn Rn ! R dada por la relacion anterior se denomina en Rn. Enseguida resumimos las propiedades mas importantes de esta funcion. 1) 2) 3) 4) d2(~ ; ~) 0, d2(~ ;~ ) = 0 xy xx d2(~ ; ~) = d2(~;~ ) xy yx d2(~ ; ~) d2(~ ;~) + d2 (~; ~) xy xz zy d2(~ ; ~) = 0 ) ~ = ~ xy x y1 2 1 2
Proposicion 1. Para cualesquiera vectores ~ , ~ y ~ en Rn se tiene x y z
Demostracion. Para la prueba recurriremos a la proposicion 1 de la leccion anterior. Prueba de (1): Como
d2(~ ; ~) = k~ ~ k2 ; xy x y se sigue automaticamente que d2(~ ; ~) 0. Ademas si xy d2(~ ; ~) = k~ ~k2 = 0; xy x y entonces ~ ~ = ~ , es decir ~ = ~. x y 0 x y Prueba de (2): d2(~ ; ~) = k~ ~k2 xy x y = k~ ~ k2 y x = d2(~;~ ) yx d2(~ ; ~) = k~ ~k2 xy x y = k~ ~ + ~ ~ k2 x z z y k~ ~k2 + k~ ~k2 x z z y = d2(~ ;~) + d2 (~; ~) xz zy 60
Prueba de (3):
Prueba de (4): Si d2(~ ; ~) = 0, se tiene por de nicion k~ ~k2 = 0. O sea ~ ~ = ~ , es decir xy x y x y 0 ~ = ~. Esto prueba la proposicion 1. x y |
4.2. Otras Metricas en Rn . Como podemos observar, en la prueba de la propo-
sicion anterior solamente recurrimos a las propiedades que aparecen en la proposicion 1 de la leccion 3, que son las mismas que se adoptaron como axiomas en la de nicion de norma. Dado que las normas k k1 y k k1 tambien poseen estas propiedades, conclu mos que d2 y d1 dadas por d1(~ ; ~) = k~ ~k1 xy x y d1 (~ ; ~) = k~ ~k1 xy x y satisfacen las propiedades correspondientes. Se tiene entonces la siguiente proposicion
Proposicion 2. Si k k es cualquiera de las normas k k , k k , k k1 , la funcion d : Rn Rn ! R, dada por1 2
d(~ ; ~) = k~ ~k xy x y satisface las siguientes propiedades 1) d(~ ; ~) 0; d(~ ;~ ) = 0 xy xx 2) d(~ ; ~) = d(~;~ ) xy yx 3) d(~ ; ~) d(~ ;~) + d(~; ~) xy xz zy 4) d(~ ; ~) = 0 ) ~ = ~ xy x y 61
i) d(~ ; ~) 0; d(~ ;~ ) = 0 xy xx ii) d(~ ; ~) = d(~;~ ) xy yx iii) d(~ ; ~) d(~ ;~) + d(~; ~) xy xz zy iv) d(~ ; ~) = 0 ) ~ = ~ xy x y se denomina o en Rn .
De nicion 2. Cualquier funcion d : Rn Rn ! R que satisfaga las siguientes condiciones (): para cualesquiera ~ ; ~;~ 2 Rn xyz
Se tiene entonces que d1(~ ; ~), d2(~ ; ~) y d1 (~ ; ~) son metricas en Rn . Como xy xy xy hemos dicho antes, d2 se llama ; a la funcion d1 se le llama o .
Nota. En la seccion 3.4, se menciono (ejercicio 2) que para p k kp : Rn ! R dada pork~ kp = kx1jp + x+ jxnjp ]1 p
1, la funcion
es una norma en Rn, la cual hemos denominado Norma de Minkowski. La metrica correspondiente dp : Rn Rn ! R, esta dada por dp (~ ; ~) = k~ ~kp xy x y = jx1 y1 jp + + jxn yn jp ]p
1
y nos referiremos a ella como . Casos particulares de la metrica de Minkowski son las metricas d1 y la metrica euclidiana d2. Otros ejemplos de la metrica de Minkowski son d3(~ ; ~) = 3 jx1 y1 j3 + xy dp2 = jx1 y1 j +p2
p h
+ jxn yn j3 + jxn yn j
p2 i p2 2
62
Leccion 5Bolas y Esferas
5.1. Bolas abiertas, Bolas cerradas y Esferas. En la presente seccion comenzamos propiamente nuestro estudio de la topolog a de Rn . Ahora ser a un tanto dif cil describir de lo que se trata dicho estudio, por el momento solamente diremos que los primeros conceptos importantes de la topolog a de Rn son los que de nimos a continuacion. En lo que sigue, d representara cualquiera de las metricas d1, d2 o d1 en Rn.
De nicion 1. Sea ~ o un punto en Rn . x
1) La con ~ o y r > 0 es el conjunto x B(~ o ; r) = f ~ 2 Rn j k~ ~ o k < r g . x x x x 2) La con en ~ o y r 0 es el conjunto x B(~ o ; r) = f ~ 2 Rn j k~ ~ o k r g x x x x 3) La con ~ y r 0 es el conjunto x S(~ o ; r) = f ~ 2 Rn j k~ ~ o k = r g x x x x
Observemos que la bola abierta esta de nida para radios estrictamente positivos, mientras que la bola cerrada y la esfera pueden tener radio cero. En este ultimo caso ambas se reducen a un punto: B(~ o ; 0) = f~ o g x x S(~ o ; 0) = f~ o g x x 63
Los conjuntos B(~ o ; r), B(~ o ; r) y S(~ o ; r) son subconjuntos de Rn y su aspecto x x x depende de la metrica d con la cual se midan las distancias. Consideremos el caso particular de la bola cerrada con centro en el origen ~ 0 y radio r = 1 en el plano R2 , para cada una de las metricas d1, d2 y d1 . Denotemos por B1(~ ; 1), B2(~ ; 1) y B1 (~ ; 1) las bolas cerradas segun estas metricas, 0 0 0 respectivamente. La bola cerrada B2 (~ ; 1) = f ~ 2 R2 j k~ k2 1 g 0 x x p 2 = f (x; y) 2 R j x2 + y2 1 g = f (x; y) 2 R2 j x2 + y2 1 g corresponde al disco con centro el origen ~ = (0; 0) y radio r = 1. 0
La periferia o circunferencia de este disco, es el c rculo que tiene por ecuacion x2 + y2 = 1, esto corresponde a la esfera x S2(~ ; 1) = f ~ 2 R2 j k~ k2 = 1 g 0 x 64
Sea ahora la bola cerrada B1(~ ; 1) = f ~ 2 R2 j k~ k1 1 g 0 x x 2 = f (x; y) 2 R j jxj + jyj 1 g Para determinar geometricamente este conjunto de puntos del plano, consideremos como inicio el primer cuadrante. Es decir, consideremos los puntos (x; y) de R2 con x 0, y 0. En este caso la desigualdad jxj + jyj 1 se escribe como x+y 1 y la region correspondiente son los puntos del primer cuadrante que se encuentran \abajo" de la recta x + y = 1, es decir, son los puntos de la region triangular que tiene por vertices (0; 0), (1; 0) y (0; 1).
Consideremos ahora los puntos (x; y) del segundo cuadrante, los cuales satisfacen x 0, y 0. La desigualdad jxj + jyj 1 en este caso toma la forma x + y 1: 65
Los puntos (x; y) que satisfacen esta desigualdad, son los que se encuentran en el semiplano inferior determinado por la recta y x = 1, as que la region correspondiente es el triangulo cuyos vertices son los puntos ( 1; 0), (0; 0) y (0; 1).
Haciendo un analisis similar para cada uno de los 2 cuadrantes restantes y reuniendo las regiones determinadas, obtenemos nalmente que el conjunto B1(~ ; 1) = f (x; y) 2 R2 j jxj + jyj 1 g 0 corresponde al cuadrado en el plano cuyos vertices son los puntos (1; 0), (0; 1), ( 1; 0) y (0; 1).
Se deja como ejercicio para el lector el analisis para los cuadrantes y . S1(~ ; 1) = f ~ 2 R2 j k~ k1 = 1 g 0 x x es el contorno de este cuadrado, dicho de otro modo, la ecuacion del contorno poligonal es jxj + jyj = 1. 66 La esfera
Consideremos nalmente la bola cerrada B1 (~ ; 1) = f ~ 2 R2 j k~ k1 1 g 0 x x 2 = f (x; y) 2 R j max fjxj; jyjg 1 g Nuevamente iniciemos nuestro analisis con el primer cuadrante. Se tiene entonces jxj = x y jyj = y, as que en este caso max fjxj; jyjg = max fx; yg Por de nicion se tiene x si x y max fx; yg = y si y x Consideremos la recta a 45 , y = x
Es claro que para los puntos (x; y) del primer cuadrante que se ecuentran abajo de la recta se tiene max fx; yg = x, y paralos puntos del mismo cuadrante que se ecuentran arriba de la recta, se cumple max fx; yg = y 67
De esto se sigue que los puntos (x; y) del primer cuadrante que satisfacen max fx; yg 1 son los del cuadrado que tiene por vertices (0; 0), (1; 0), (1; 1) y (0; 1)
Haciendo un analisis similar para cada uno de los cuadrantes, obtenemos que el conjunto B1 (~ ; 1) corresponde precisamente al cuadrado cuyos vertices son 0 ( 1; 1), (1; 1), (1; 1) y ( 1; 1). 68
Es claro que la esfera S1 (~ ; 1) consiste del contorno del cuadrado anterior, por 0 lo que este contorno tendra por ecuacion max fjxj; jyjg = 1.
Nota 1. Si a y b son numeros reales cualesquiera, el lector puede veri car facilmenteque max fa; bg = a + b + ja bj 2
Entonces podemos escribir para ~ 2 R2 x
k~ k1 = max fjxj; jyjg x = jxj + jyj + j jxj jyj j2 Con esta formula, podemos escribir la ecuacion del contorno del cuadrado anterior 69
como o sea
jxj + jyj + j jxj jyj j = 12
jxj + jyj + j jxj jyj j = 2
dientes a las bolas B1(~ ; 1), B2 (~ ; 1) y B1 (~ ; 1), as como las esferas correspondientes 0 0 0 2 ( guras sin sombrear) en R .
Nota 2. En las guras de abajo se encuentran sobrepuestas las regiones correspon-
En la siguiente gura se muestran ademas las esferas correspondientes a las metricas d1:5 y d10. 70
Como podemos intuir, haciendo variar p creciendo desde 1, el cuadrado interior se deforma continuamente hasta convertirse en el c rculo (p ! 2), este a su vez se deforma continuamente, tendiendo al cuadrado exterior, el c rculo se alcanza con p = 2, el cuadrado exterior no se alcanza para ningun valor de p, solamente se obtiene como l mite (p ! 1). B2 (~ ; 1) y B1 (~ ; 1) en el espacio tridimensional es mas complicado. En la siguiente 0 0 gura se ilustran las esferas correspondientes S1 (~ ; 1), S1 (~ ; 1), as como la conocida 0 0 ~ ; 1) respecto a la norma euclidiana. esfera S2(0
Nota 3. El analisis para la interpretacion geometrica de las bolas cerradas B (~ ; 1), 01
La esfera S1 (~ ; 1) es un cubo con centro en ~ , caras paralelas a los planos 0 0 coordenados y arista de longitud 2. La esfera S1(~ ; 1) en un octaedro regular, con 0 p centro en el origen ~ y arista igual a 2, es una especie de diamante. 0 71
5.2. Relacion entre las normas k k , k k y k k1 . Las guras anteriores1 2
muestran la situacion geometrica relativa, entre las bolas cerradas B1 (~ ; 1), B2 (~ ; 1) 0 0 y B1 (~ ; 1). Se puede probar que en general se tienen las contenciones 0 B1(~ o ; r) B2(~ o ; r) B1 (~ o ; r) x x x y por supuesto, las correspondientes para las bolas abiertas B1(~ o ; r) B2 (~ o ; r) B1 (~ o ; r): x x x Esto es consecuencia de las desigualdades
k~ k1 k~ k2 k~ k1 x x xque en forma expl cita se escriben max fjx1j; : : :; jxnjg
q
x2 + 1
+ x2 jx1j + n
+ jxnj:
Antes de probar las contenciones, probemos las desigualdades anteriores: Sea ~ = (x1 ; : : :; xn) 2 Rn. Como x (max fjx1j; : : :; jxnjg)2 x2 + 1 tenemos max fjx1j; : : :; jxnjg Por otra parte, dado que x2 + 1 tenemos + x2 (jx1j + n + x2 jx1j + n 72 + jxnj)2 + jxnj + x2 n + x2 : n
q
x2 + 1
q
x2 + 1
Esto prueba la doble desigualdad.
|
Las contenciones, tanto para las bolas cerradas como para la bolas abiertas, se siguen entonces de las desigualdades
k~ ~ o k1 k~ ~ o k2 k~ ~ o k1 < r x x x x x x Pues, por ejemplo, si ~ 2 B2 (~ o ; r) entonces k~ ~ o k2 < r, luego k~ ~ o k1 < r x x x x x x es decir ~ 2 B1 (~ o ; r). Esto prueba que x xB2(~ o ; r) B1 (~ o ; r): x x Se deja como ejercicio para el lector las pruebas de las otras contenciones. Para las esferas no hay alguna relacion similar, lo que se puede deducir de las desigualdades anteriores son las siguientes relaciones S1 (~ o ; r) B2(~ o ; r) B1 (~ o ; r) x x x S2 (~ o ; r) B1 (~ o ; r) x x y obviamente S1 (~ o ; r) B1 (~ o ; r): x x
Problemas y ejercicios.
0 1. Complete la demostracion de que la bola cerrada B1 (~ ; 1) corresponde al cuadrado en el plano, que tiene por vertices (1; 0), (0; 1), ( 1; 0) y (0; 1). 2. Complete la demostracion de que la bola cerrada B1 (~ ; 1) corresponde al cua0 drado en el plano, cuyos vertices son (1; 1), ( 1; 1), ( 1; 1) y (1; 1). 3. Pruebe la relacion maxf a; b g = a + b + ja bj 2 4. Halle una formula para minf a; b g. 5. Halle formulas para maxf a; b; c g y minf a; b; c g. 6. Determine la ecuacion de la super cie del cubo en el espacio tridimensional, con centro en el origen, caras paralelas a los planos coordenados y de arista 2. 73
Leccion 6Conjuntos Abiertos y Conjuntos Cerrados
en la topolog a de Rn es el de conjunto abierto. Junto con el, su pareja inseparable, el de conjunto cerrado. Conjunto abierto y conjunto cerrado dos conceptos que no coinciden ni son contrarios; son \duales", en un sentido que trataremos de explicar a lo largo del texto. Por ahora solamente veremos la de nicion de cada uno de ellos y alguna de sus propiedades mas importantes, las cuales con toda intencion formularemos paralelamente, con lo que empezaremos a entender esa dualidad.
6.1. Conjuntos Abiertos y Conjuntos Cerrados. El concepto mas importante
Como todo concepto nuevo, tendremos que ir gradualmente entendiendolos y acostumbrandonos a su signi cado, a base de un repetido uso. Las palabras abierto y cerrado que empleamos, tienen un signi cado coloquial que nada tiene que ver con su signi cado matematico.
De nicion 1.
1) Un conjunto V Rn se dice que es si para cada ~ 2 V existe una bola abierta x B(~ ; r) contenida en V. Es decir, si para cada ~ 2 V existe r > 0 tal que x x B(~ ; r) V x 2) Un conjunto F Rn se dice que es si su complemento Fc = Rn F es un conjunto abierto. Para ilustrar esta de nicion acudiremos a dos conjuntos que son casos extremos, 74
tanto desde el punto de vista de la contencion de conjuntos, como de la logica que aplicaremos.
Ejemplo 1. El espacio mismo Rn es un conjunto abierto. Este es un hecho trivial, ya que dado cualquier punto ~ 2 Rn , toda bola abierta B(~ ; r) esta contenida en x xRn. Rn es abierto. A diferencia de la a rmacion del ejemplo 1 que resulto demasiado obvia, en este caso a los principiantes l