MAXIMUM LIKELIHOOD JOINT ASSOCIATION, TRACKING, AND FUSION IN STRONG CLUTTER
Leonid PerlovskyHarvard University and the AF Research Lab
Seminar Department of Electrical and Computer Engineering, University of Connecticut
Storr, 6 Mar., 2009

OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

RELATED RESEARCH
• > 50 publications by Perlovsky and co-authors on concurrent association, tracking, and fusion (+ > 200 other applications)
– Perlovsky, L. I. (1991). Model Based Target Tracker with Fuzzy Logic. 25th Annual Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA.
– Perlovsky, L.I., Schoendorf, W.H., Tye, D.M., Chang, W. (1995). Concurrent Classification and Tracking Using Maximum Likelihood Adaptive Neural System. Journal of Underwater Acoustics, 45(2), pp.399-414.
• Many publications by Bar-Shalom, Streit, Luginbuhl, Willett, Avitzour, and co-authors
• Similarity: algorithms related to EM• Differences:
– Formulation of likelihood– Maximization procedures– Performance: linear complexity, Cramer-Rao Bound
• Cramer-Rao Bound for joint association and tracking– Perlovsky, L.I. (1997). Cramer-Rao Bound for Tracking in Clutter and Tracking Multiple
Objects. Pattern Recognition Letters, 18(3), pp.283-288.
COMBINATORIAL COMPLEXITY 50 years of difficulties
• Detect signal in noise and clutter at the farthest possible distance
• SP, detection, exploitation, fusion, tracking, etc. in noise/clutter– Requires association (pixels<->objects) before detection
If 1 object, no noise: (1) detect pixels, (2) detect objects, (3) recognize targets– Joint detection-discrimination-classification…
• Combinatorial Complexity (CC) – Need to evaluate large numbers of combinations (pixels<->objects) ,
operations: ~MN
– A general problem (since the 1950s) SP, detection, recognition, tracking, fusion, exploitation, situational awareness,… Pattern recognition, neural networks, rule systems…
• Combinations of 100 elements are 100100
– Larger than the number of particles in known Universe Greater than all the elementary events in the Universe during its entire life
• CC affects many SP algorithms– Our sensors under-utilize signals– Work much worse than Cramer-Rao Bound information-theoretic limit
CC vs. LOGIC
• CC is related to formal logic– Gödel proved that logic is “illogical,” “inconsistent” (1930s)
– CC is Gödel's “incompleteness” in a finite system
• Fuzzy logic – How to select degree of fuzziness?– The mind fits fuzziness for every process => CC
• Logic pervades all algorithms and neural networks – Rule systems, fuzzy systems (degree of fuzziness), pattern recognition, neural networks (training uses logic)
• Probabilistic association (Bar-Shalom) – Overcame logic in association– Where all logical steps overcome?

DYNAMIC LOGIC overcame logic limitations
•CC is related to logic– CC is Gödel's “incompleteness” in a finite system – Logic pervaded all algorithms and neural
networks in the pastrule systems, fuzzy systems (degree of fuzziness), pattern
recognition, neural networks (training uses logical statements)
•Dynamic Logic is a process-logic– “from vague to crisp” (statements, targets,
decisions…)
•Overcomes CC– Fast algorithms
OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

JOINT LIKELIHOOD for tracks and clutter
• Total likelihood– L = l ({x}) = l (x(n))
• no assumption of “independence”
• Conditional likelihoods
– l (x(n)) = r(m) l (x(n) | Mm(Sm,n))
– l (x(n) | Mm(Sm,n)) is a conditional likelihood for x(n) given m
• {x(n)} are not independent, M(n) may depend on n’
• CC: L contains MN items: all associations of pixels and models (LOGIC)
n
m

EXAMPLES OF MODELS
• Linear track model– Mm(Sm,n) = Xm + Vm*t; Sm = (Xm, Vm, rm, Cm
-1)
• Gaussian conditional likelihoods
– l (x(n) | Mm(Sm,n)) =
(2) -d/2 (detC)-1/2 exp{ -0.5 [ x(n) - Mm(Sm,n) ]T Cm-1 [ x(n) - Mm(Sm,n) ] }
– No “Gaussian” assumption • errors are Gaussian • mixture of any pdfs can be used
• Uniform clutter model– rm, l (x(n) | Mm(Sm,n)) = 1/ volume(x)
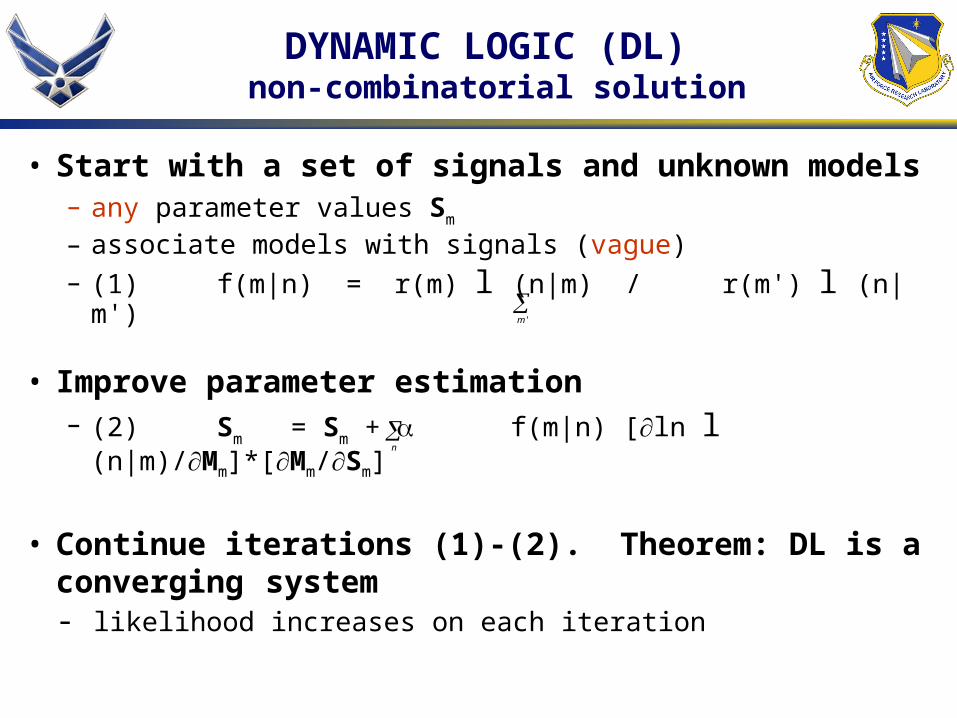
DYNAMIC LOGIC (DL) non-combinatorial solution
• Start with a set of signals and unknown models– any parameter values Sm – associate models with signals (vague)– (1) f(m|n) = r(m) l (n|m) / r(m') l (n|m')
• Improve parameter estimation– (2) Sm = Sm + f(m|n) [ln l
(n|m)/Mm]*[Mm/Sm]
• Continue iterations (1)-(2). Theorem: DL is a converging system- likelihood increases on each iteration
'm
n

OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

TRACKING AND DETECTION BELOW CLUTTER
yDL starts with uncertain knowledge and converges rapidly on exact solution
Performance achieves joint CRB for association and estimation

0 1 km
TRACKING AND DETECTION BELOW CLUTTER
Cross-Range
Ra
ng
e1
km0
(a)True
Tracks
detections
Ra
ng
e1
km0
c d
(b)
e f g h
Multiple Hypothesis Testing “logical” complexity ~ 101800; DL complexity ~ 106; S/C ~ 18 dB improvement

NUMBER OF TARGETS
•Active models and one dormant model - Only r(m) is estimated for the dormant model- The dormant model is activated if r(m) > threshold- An active model is deactivated if r(m) < threshold- In this example threshold = 0.001 of the total signal
- threshold = 0.001 x(n)
n

LOCAL MAXIMA
•Practically it is not a problem
•Reasons- Vague initial states smooth local maxima- Activation and deactivation eliminates local convergences
- In system applications, new data are coming all the time
local maxima come and go, real tracks persist

JOINT FUSION, ASSOCIATION, TRACKING, AND NAVIGATION
•3 platforms-sensors•Targets cannot be detected or tracked with one sensor
•All data are processed simultaneously•GPS is inadequate for triangulation
- Relative platform positions have to be estimated jointly with target tracks
•Multiple Hypothesis Testing “logical” complexity ~ 1017000

Sensor 1 (of 3): Model Evolves to Locate Target Tracks in Image Data
UNCLASSIFIED
truth data Initial uncertain model
Models converged to the truthImproved model after few iterations Few more iterations
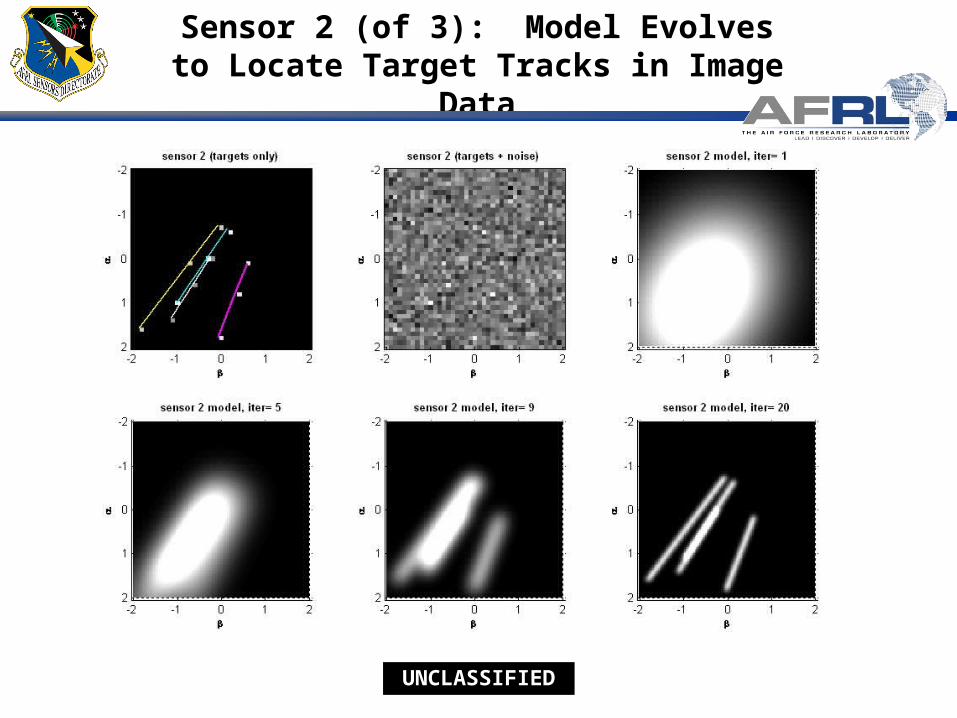
Sensor 2 (of 3): Model Evolves to Locate Target Tracks in Image Data
UNCLASSIFIED
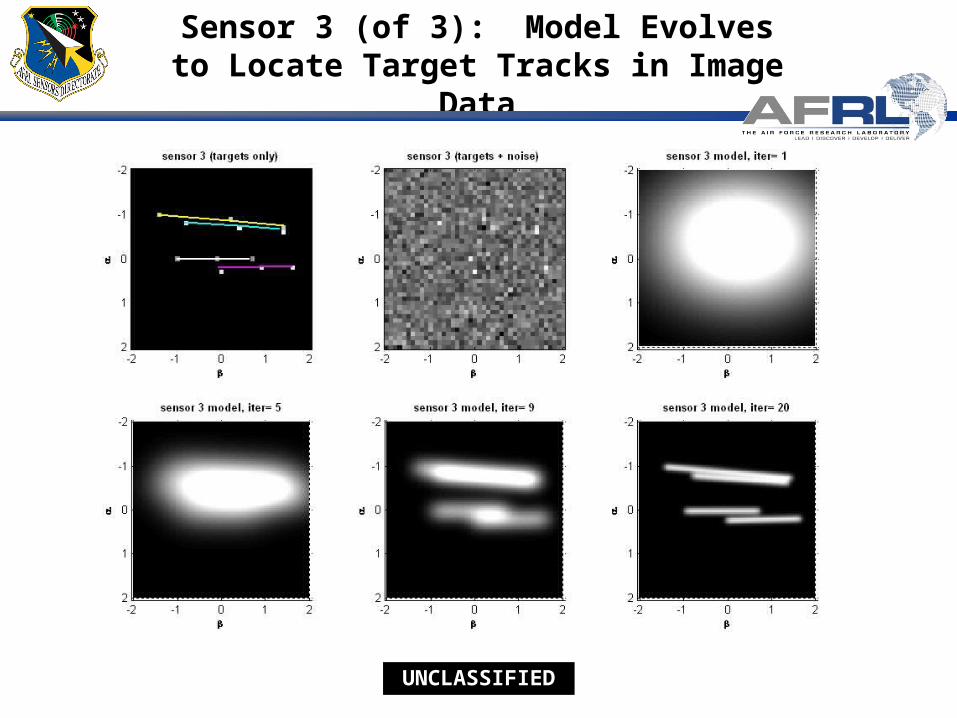
Sensor 3 (of 3): Model Evolves to Locate Target Tracks in Image Data
UNCLASSIFIED

NAVIGATION, FUSION, TRACKING, AND DETECTION this is the basis for the previous 3 figures, all fused in x,y,z, coordinates
OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

PUBLICATIONS
300 publications
OXFORD UNIVERSITY PRESS(2001; 3rd printing)
Neurodynamics of High Cognitive Functionswith Prof. Kozma, Springer, 2007
Sapient Systemswith Prof. Mayorga, Springer, 2007
RECOGNITION
• 2007 Gabor Award- The top engineering award from
International Neural Network Society (INNS)
• Elected to the Board of Governors of INNS
• 2007 John L. McLucas Award- The top scientific award from the US Air
Force
CONCLUSION
• Dynamic Logic – an approach to improve algorithms and developing new ones
–Being developed since late 1980s–Proven breakthrough in several areas
• More can be done
16-Sep-05 24
Recommended