Embed Size (px)
DESCRIPTION
MAXIMUM LIKELIHOOD JOINT ASSOCIATION, TRACKING, AND FUSION IN STRONG CLUTTER. Seminar Department of Electrical and Computer Engineering, University of Connecticut Storr, 6 Mar., 2009. Leonid Perlovsky Harvard University and the AF Research Lab. OUTLINE. Related research - PowerPoint PPT Presentation
Citation preview
MAXIMUM LIKELIHOOD JOINT ASSOCIATION, TRACKING, AND FUSION IN STRONG CLUTTER
Leonid PerlovskyHarvard University and the AF Research Lab
Seminar Department of Electrical and Computer Engineering, University of Connecticut
Storr, 6 Mar., 2009

OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

RELATED RESEARCH
• > 50 publications by Perlovsky and co-authors on concurrent association, tracking, and fusion (+ > 200 other applications)
– Perlovsky, L. I. (1991). Model Based Target Tracker with Fuzzy Logic. 25th Annual Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA.
– Perlovsky, L.I., Schoendorf, W.H., Tye, D.M., Chang, W. (1995). Concurrent Classification and Tracking Using Maximum Likelihood Adaptive Neural System. Journal of Underwater Acoustics, 45(2), pp.399-414.
• Many publications by Bar-Shalom, Streit, Luginbuhl, Willett, Avitzour, and co-authors
• Similarity: algorithms related to EM• Differences:
– Formulation of likelihood– Maximization procedures– Performance: linear complexity, Cramer-Rao Bound
• Cramer-Rao Bound for joint association and tracking– Perlovsky, L.I. (1997). Cramer-Rao Bound for Tracking in Clutter and Tracking Multiple
Objects. Pattern Recognition Letters, 18(3), pp.283-288.
COMBINATORIAL COMPLEXITY 50 years of difficulties
• Detect signal in noise and clutter at the farthest possible distance
• SP, detection, exploitation, fusion, tracking, etc. in noise/clutter– Requires association (pixels<->objects) before detection
If 1 object, no noise: (1) detect pixels, (2) detect objects, (3) recognize targets– Joint detection-discrimination-classification…
• Combinatorial Complexity (CC) – Need to evaluate large numbers of combinations (pixels<->objects) ,
operations: ~MN
– A general problem (since the 1950s) SP, detection, recognition, tracking, fusion, exploitation, situational awareness,… Pattern recognition, neural networks, rule systems…
• Combinations of 100 elements are 100100
– Larger than the number of particles in known Universe Greater than all the elementary events in the Universe during its entire life
• CC affects many SP algorithms– Our sensors under-utilize signals– Work much worse than Cramer-Rao Bound information-theoretic limit
CC vs. LOGIC
• CC is related to formal logic– Gödel proved that logic is “illogical,” “inconsistent” (1930s)
– CC is Gödel's “incompleteness” in a finite system
• Fuzzy logic – How to select degree of fuzziness?– The mind fits fuzziness for every process => CC
• Logic pervades all algorithms and neural networks – Rule systems, fuzzy systems (degree of fuzziness), pattern recognition, neural networks (training uses logic)
• Probabilistic association (Bar-Shalom) – Overcame logic in association– Where all logical steps overcome?

DYNAMIC LOGIC overcame logic limitations
•CC is related to logic– CC is Gödel's “incompleteness” in a finite system – Logic pervaded all algorithms and neural
networks in the pastrule systems, fuzzy systems (degree of fuzziness), pattern
recognition, neural networks (training uses logical statements)
•Dynamic Logic is a process-logic– “from vague to crisp” (statements, targets,
decisions…)
•Overcomes CC– Fast algorithms
OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

JOINT LIKELIHOOD for tracks and clutter
• Total likelihood– L = l ({x}) = l (x(n))
• no assumption of “independence”
• Conditional likelihoods
– l (x(n)) = r(m) l (x(n) | Mm(Sm,n))
– l (x(n) | Mm(Sm,n)) is a conditional likelihood for x(n) given m
• {x(n)} are not independent, M(n) may depend on n’
• CC: L contains MN items: all associations of pixels and models (LOGIC)
n
m

EXAMPLES OF MODELS
• Linear track model– Mm(Sm,n) = Xm + Vm*t; Sm = (Xm, Vm, rm, Cm
-1)
• Gaussian conditional likelihoods
– l (x(n) | Mm(Sm,n)) =
(2) -d/2 (detC)-1/2 exp{ -0.5 [ x(n) - Mm(Sm,n) ]T Cm-1 [ x(n) - Mm(Sm,n) ] }
– No “Gaussian” assumption • errors are Gaussian • mixture of any pdfs can be used
• Uniform clutter model– rm, l (x(n) | Mm(Sm,n)) = 1/ volume(x)
DYNAMIC LOGIC (DL) non-combinatorial solution
• Start with a set of signals and unknown models– any parameter values Sm – associate models with signals (vague)– (1) f(m|n) = r(m) l (n|m) / r(m') l (n|m')
• Improve parameter estimation– (2) Sm = Sm + f(m|n) [ln l
(n|m)/Mm]*[Mm/Sm]
• Continue iterations (1)-(2). Theorem: DL is a converging system- likelihood increases on each iteration
'm
n

OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

TRACKING AND DETECTION BELOW CLUTTER
yDL starts with uncertain knowledge and converges rapidly on exact solution
Performance achieves joint CRB for association and estimation

0 1 km
TRACKING AND DETECTION BELOW CLUTTER
Cross-Range
Ra
ng
e1
km0
(a)True
Tracks
detections
Ra
ng
e1
km0
c d
(b)
e f g h
Multiple Hypothesis Testing “logical” complexity ~ 101800; DL complexity ~ 106; S/C ~ 18 dB improvement

NUMBER OF TARGETS
•Active models and one dormant model - Only r(m) is estimated for the dormant model- The dormant model is activated if r(m) > threshold- An active model is deactivated if r(m) < threshold- In this example threshold = 0.001 of the total signal
- threshold = 0.001 x(n)
n

LOCAL MAXIMA
•Practically it is not a problem
•Reasons- Vague initial states smooth local maxima- Activation and deactivation eliminates local convergences
- In system applications, new data are coming all the time
local maxima come and go, real tracks persist

JOINT FUSION, ASSOCIATION, TRACKING, AND NAVIGATION
•3 platforms-sensors•Targets cannot be detected or tracked with one sensor
•All data are processed simultaneously•GPS is inadequate for triangulation
- Relative platform positions have to be estimated jointly with target tracks
•Multiple Hypothesis Testing “logical” complexity ~ 1017000

Sensor 1 (of 3): Model Evolves to Locate Target Tracks in Image Data
UNCLASSIFIED
truth data Initial uncertain model
Models converged to the truthImproved model after few iterations Few more iterations
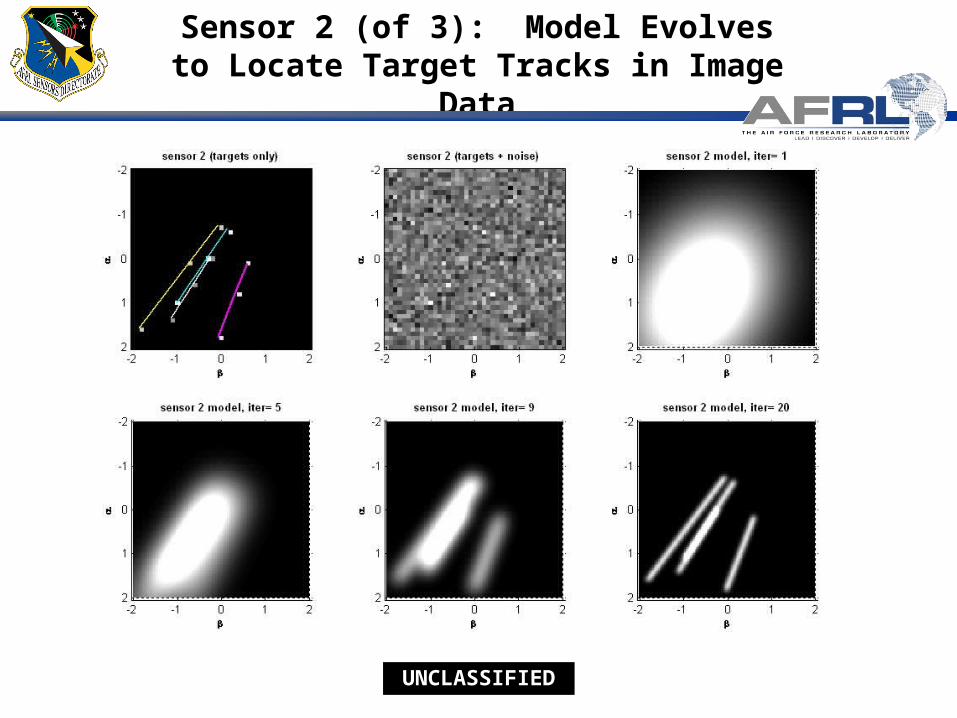
Sensor 2 (of 3): Model Evolves to Locate Target Tracks in Image Data
UNCLASSIFIED
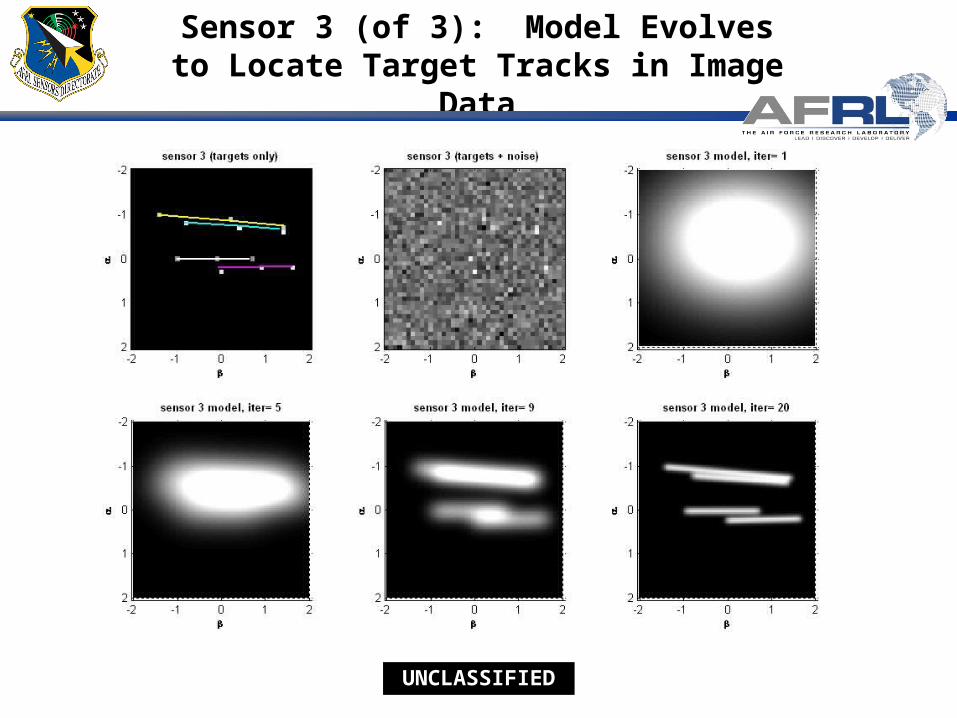
Sensor 3 (of 3): Model Evolves to Locate Target Tracks in Image Data
UNCLASSIFIED

NAVIGATION, FUSION, TRACKING, AND DETECTION this is the basis for the previous 3 figures, all fused in x,y,z, coordinates
OUTLINE
• Related research
• Combinatorial complexity and logic
• Dynamic logic
• Joint likelihood, math. formulation
• Examples
• Publications, recognition

PUBLICATIONS
300 publications
OXFORD UNIVERSITY PRESS(2001; 3rd printing)
Neurodynamics of High Cognitive Functionswith Prof. Kozma, Springer, 2007
Sapient Systemswith Prof. Mayorga, Springer, 2007
RECOGNITION
• 2007 Gabor Award- The top engineering award from
International Neural Network Society (INNS)
• Elected to the Board of Governors of INNS
• 2007 John L. McLucas Award- The top scientific award from the US Air
Force
CONCLUSION
• Dynamic Logic – an approach to improve algorithms and developing new ones
–Being developed since late 1980s–Proven breakthrough in several areas
• More can be done
16-Sep-05 24