ITERATIVE PROCESSING: FROM APPLICATIONS
TO PARALLEL IMPLEMENTATIONS
a dissertation
submitted to the department of electrical engineering
and the committee on graduate studies
of stanford university
in partial fulfillment of the requirements
for the degree of
doctor of philosophy
Ghazi Al-Rawi
October 2002

c© Copyright by Ghazi Al-Rawi 2002
All Rights Reserved
ii

I certify that I have read this dissertation and that, in my opinion, it is fully adequate
in scope and quality, as a dissertation for the degree of Doctor of Philosophy.
John M. Cioffi(Principal Adviser)
I certify that I have read this dissertation and that, in my opinion, it is fully adequate
in scope and quality, as a dissertation for the degree of Doctor of Philosophy.
Mark A. Horowitz
I certify that I have read this dissertation and that, in my opinion, it is fully adequate
in scope and quality, as a dissertation for the degree of Doctor of Philosophy.
Ahmad R. Bahai
Approved for the University Committee on Graduate Studies:
iii

iv

Contents
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
1 Introduction 1
1.1 Iterative Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Probabilistic Information . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Massage-Passing on Graphs . . . . . . . . . . . . . . . . . . . 4
1.1.3 Optimality of the Message-Passing Algorithm . . . . . . . . . 7
1.2 Benefits of Iterative Processing . . . . . . . . . . . . . . . . . . . . . 7
1.2.1 Complexity Reduction . . . . . . . . . . . . . . . . . . . . . . 8
1.2.2 Parallel Implementations . . . . . . . . . . . . . . . . . . . . . 10
1.3 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Coded Orthogonal Frequency Division Multiplexing 15
2.1 Wireless Channel Model . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1.1 Modeling Channel Time-Variation . . . . . . . . . . . . . . . . 17
2.1.2 Diversity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Multicarrier Modulation . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.1 DFT-Based Channel Partitioning . . . . . . . . . . . . . . . . 20
2.2.2 DMT and OFDM . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Coding Fundamentals . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.1 Block Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.2 Convolutional Codes . . . . . . . . . . . . . . . . . . . . . . . 28
v

2.3.3 Trellis Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.3.4 Interleaving . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4 Channel Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4.1 Exploiting the Code . . . . . . . . . . . . . . . . . . . . . . . 34
2.5 Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Bibliography 36
vi

List of Tables
vii

List of Figures
1.1 A node with K + 1 edges. . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Messages exchanged between two nodes. . . . . . . . . . . . . . . . . 6
1.3 Interleaving between modules to remove short cycles. . . . . . . . . . 8
1.4 Block diagram of a communication system. . . . . . . . . . . . . . . . 9
2.1 Channel partitioning in multicarrier modulation. . . . . . . . . . . . . 21
2.2 A DFT-based MCM system. . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Water-filling optimization in DMT systems. . . . . . . . . . . . . . . 25
2.4 Transmit spectrum of an OFDM system. . . . . . . . . . . . . . . . . 26
2.5 A rate-1/2 4-state recursive systematic convolutional (RSC) encoder. 29
2.6 The trellis diagram of the 4-state RSC encoder. . . . . . . . . . . . . 30
2.7 A 16-QAM constellation partitioned into 4 cosets. . . . . . . . . . . . 31
viii

Chapter 1
Introduction
The demand for increasingly higher speed wireless communications
will likely continue for the foreseen future. Interference, multi-path, and time
variation are inherent characteristics of wireless channels that make achieving high
data rates on these channels a difficult problem. This problem becomes even more
challenging if we consider the practical need for low-complexity and low-power system
implementation, especially at the mobile unit. In recent years, a vast amount of
research on wireless communication systems has been driven by the need to find
efficient solutions to the above problem. For example, mutlicarrier transmission has
been suggested and is currently being used as an effective technique for mitigating
the multi-path problem [1, 2, 3]. The use of multiple transmitting and receiving
antennas has been suggested to increase the capacity of the channel and to alleviate
the interference problem [4, 5, 6]. The receiver design can be optimized by exploiting
the global structure of the communication system to improve performance and reduce
the training overhead required to track the time variations of the channel. Iterative
processing offers a low-complexity alternative for achieving this objective. In this
thesis, we show how iterative processing can significantly improve the performance
of a coded orthogonal frequency-division multiplexing (OFDM) receiver with only
modest increase in complexity.
When it comes to hardware implementation, the use of parallel processing can
1

Chapter 1. Introduction 2
increase throughput and reduce latency. It can also offer an trade-off between pro-
cessing speed and power consumption. Recent advances in VLSI technology allowed
millions of transistors to be easily integrated on a single chip. These advances make
parallel implementations more attractive and even open the door for implementing
demanding communication algorithms on programmable parallel processors, which
offers higher flexibility and potentially lower implementation cost. As will be shown
in this thesis, iterative processing not only reduces complexity, but is also amenable
to parallel implementation. In particular, we study the parallel implementation of
the iterative decoding of low-density parity-check (LDPC) codes on programmable
parallel architectures.
In the rest of this chapter, Section 1.1 briefly covers the basic principles of iter-
ative processing. Graphical modeling and the message-passing algorithm, which are
the basis of iterative processing, are introduced in that section. In Section 1.2, we
illustrate how the decomposition inherent in iterative processing reduces complexity
and facilitates parallel implementations. Section 1.3 outlines the content of the fol-
lowing chapters, and lists the research contributions of this thesis. Section 1.4 shows
the notation used in the rest of the thesis.
1.1 Iterative Processing
Iterative processing indirectly exploits the global structure of a system by decompos-
ing it into simpler local structures called modules, and iteratively exchanging “soft”
“extrinsic” messages between these modules. By “soft”, we mean that these messages
represent probabilistic information. By “extrinsic”, we mean that the soft information
sent to an iterative module excludes the soft information produced that same module
in the previous iteration. Intuitively, the exclusion of self-information is needed to
avoid self-biasing, which can result in premature convergence, and to ensure indepen-
dence between the input variables to a module.

Chapter 1. Introduction 3
1.1.1 Probabilistic Information
For a variable x, there are different types of probabilities to express its relation to an
event E. The a priori probability of x with respect to the event E is the probability
that x is equal to a, and is denoted by
P priorE (x = a) = P (x = a). (1.1)
This probability is called a priori because it refers to what was known about the
variable x before observing the outcome of the event E. On the other hand, the a
posteriori probability of x with respect to the event E is the conditional probability
of x given the outcome on the event E, and is denoted by
P postE (x = a) = P (x = a|E). (1.2)
This probability represents what is known about the variable x after observing the
outcome of the event E.
Using Bayes’ theorem [7], the a posteriori probability can be written as
P (x = a|E) =1
P (E)P (E|x = a)P (x = a) (1.3)
The term P (E|x = a) is proportional to what is called the extrinsic probability, which
described the new information for x that has been obtained from the event E. The
extrinsic probability is denoted as
P extE (x = a) = cP (E|x = a), (1.4)
where c is a normalization constant to make the extrinsic probability sum to 1. There-
fore, the relationship between a priori, extrinsic, and a posteriori probabilities can be
written as
P postE (x = a) = c′P prior
E (x = a)P extE (x = a), (1.5)
where c′ is a normalization constant.

Chapter 1. Introduction 4
In the binary case, it is convenient to express the probability of a binary variable
x in terms of a real number called the log-likelihood ratio (LLR). Assuming P (x =
1) = p, the log-likelihood ratio of x is defined as
LLR(x) = logP (x = 1)
P (x = 0)= log
p
1 − p(1.6)
Clearly, LLR(x) is positive if p > 0.5, and is negative if p < 0.5. Equation (1.5) can
be rewritten in terms of log-likelihood ratios as
LLRpostE (x) = LLRprior
E (x) + LLRextE (x). (1.7)
In this representation, it is clear that the extrinsic information reflects the incremental
gain in knowledge of a posteriori information over the a priori information.
1.1.2 Massage-Passing on Graphs
The global structure of the system can be represented by a graphical model on which
messages can be passed between nodes. The normal graph, introduced by Forney [8],
is such a graphical model. A normal graph is an undirected graph in which a variable
is associated with each edge. Each node represents a local constraint on the variables
associated with the edges connected to that node. Messages corresponding to the
probability distributions of the variables are passed in both directions along all edges
of the graph. The configuration of values for edge-variables of the graph is considered
valid for the entire graph only if it satisfies all of the local constraints of the nodes in
the graph.
It is possible to group nodes and edges into structures called modules. Edges
that are connected to only one node are called external edges as opposed to internal
edges that are connected between two nodes. The external edges are used to pass
probabilistic information in and out of a module (or a graph). Such modules are
called soft-input soft-output (SISO) modules.
Suppose node N has K + 1 edges with edge-variables x0, x1, . . . , xK as shown
in Figure 1.1. Assume these variables take values in alphabets Ax0, Ax1
, . . . , AxK,

Chapter 1. Introduction 5
respectively. The subset of all possible configurations of these variable that satisfy
the local constraint is called the constraint set of the node, SN ⊂ Ax0×Ax1
×· · ·×AxK.
The extrinsic probability P extN (x0) of the edge-variable x0 can be calculated using the
a priori probabilities P priorN of the other edge-variables connected to node N as [9]
P extN (x0 = ζ0) = c0P (N |x0 = ζ0),
= c0
∑
(x0,x1,...,xK)∈SN
∼x0
K∏
i=1
P priorN (xi = ζi), (1.8)
where c0 is a normalization constant, and the summation is over all possible con-
figurations (x0, x1, . . . , xK) = (ζ0, ζ1, . . . , ζK) that satisfy the constraint of the node
N and are consistent with a fixed value of x0 = ζ0.
������ ����
���
Figure 1.1: A node with K + 1 edges.
Consider two nodes L and R with KL +1 and KR +1 edge-variables, respectively,
that are connected to each other through the edge-variable x0 as shown in Figure 1.2.
The messages associated with x0 are passed between L and R in both directions, and
are denoted by µL→R and µR→L, respectively. Assuming independence among the
edge-variables, it can be shown that the joint constraint of nodes L and R can be
exploited by computing the probabilities based on the local constraints of each node
individually, and then using the extrinsic probability of x0 with respect to node L as
the a priori probability of x0 with respect to node R, and vice versa [9]. Therefore,

Chapter 1. Introduction 6
the messages associated with x0 that needs to be exchanged between nodes L and R
are given by
µL→R(x0) = P extL (x0) = P prior
R (x0),
µR→L(x0) = P extR (x0) = P prior
L (x0). (1.9)
� � �� ��
� � ���
� ��� ��
� ����
� �� �� ������� � ���
� ����� � � � �
Figure 1.2: Messages exchanged between two nodes.
The message-passing algorithm (MPA) on a graph refers to the process of repeat-
edly computing the extrinsic probabilities of the edge-variables of each node in the
graph according to (1.8), and pass these probabilities to the neighbors of that node.
The order in which messages are passed along edges of the graph is referred to as the
message-passing schedule. The messages continue to be passed between nodes until
the stopping criterion is reached. At that point, the algorithm is declared complete,
and the extrinsic probabilities on the external edges of the graph are read out. These
probabilities are combined with the a priori probabilities of the external edge-variables
to obtain their a posteriori probabilities, which can then be used to make optimal (or
close to optimal) decisions on these variables. Other algorithms that are used for the
same purpose include the sum-product algorithm (SPA) for factor graphs [10], and
the general distributive law (GDL) [11].

Chapter 1. Introduction 7
1.1.3 Optimality of the Message-Passing Algorithm
The message-passing algorithm results in the exact probabilities if the graph of the
system has no cycles. For a cycle-free graph, which is also called a tree, a cut at
any edge divides the graph into two cycle-free subgraphs. The messages in (1.8)
can then be passed along that edge to compute the exact probabilities of the graph.
The process of dividing a subgraph into two smaller subgraphs can be continued
recursively to the limit, where each subgraphs contains only one node. Then passing
the messages in (1.8) along all internal edges of the graph will eventually result in
the exact extrinsic probabilities for the whole graph. The proof of optimality of the
message-passing algorithm for cycle-free graphs can be found in [12, 13, 10, 8].
One of the fundamental assumptions in the message-passing algorithm is that the
edge-variables connected to a node are independent. The presence of cycles in the
graph of the system invalidates that assumption, and renders the message-passing
algorithm an approximate algorithm with no guarantee of convergence. The case of
graphs with a single cycle is a special one, and was analyzed in [14, 15]. In general,
for graphs with cycles, the choice of the message-passing schedule and stopping crite-
rion can have an impact on the complexity and performance of the message-passing
algorithm.
In most practical systems, modules are usually connected each other by bundles
of edges, and within each module there is usually a high correlation between adjacent
edge-variables. This setup will likely create many short cycles in the graph of the
system. Fortunately, it was found in practice that iterative algorithms usually con-
verge to solutions very close to optimal if the graph of the system has no short cycles.
For that reason, techniques like random interleaving between modules, as shown in
Figure 1.3, are commonly used to remove short cycles.
1.2 Benefits of Iterative Processing
In this section, we consider the practical benefits of iterative processing, and its
applications in communication systems.
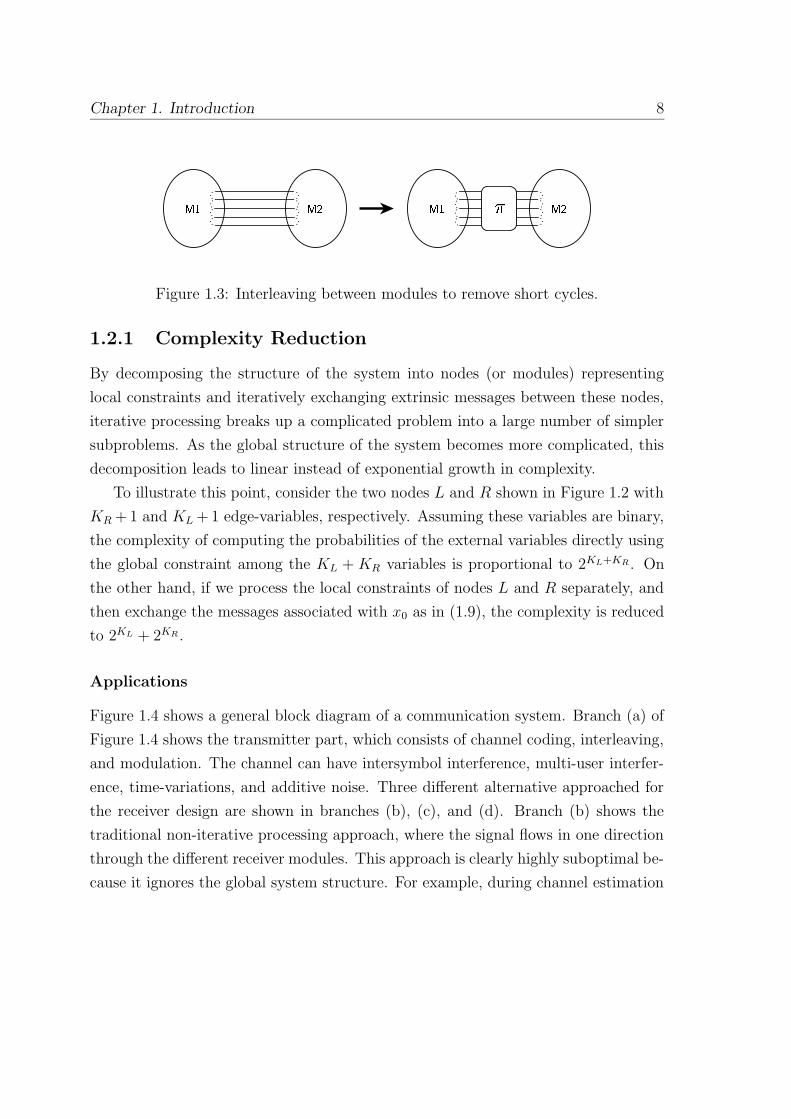
Chapter 1. Introduction 8
�! #" �! #"$
Figure 1.3: Interleaving between modules to remove short cycles.
1.2.1 Complexity Reduction
By decomposing the structure of the system into nodes (or modules) representing
local constraints and iteratively exchanging extrinsic messages between these nodes,
iterative processing breaks up a complicated problem into a large number of simpler
subproblems. As the global structure of the system becomes more complicated, this
decomposition leads to linear instead of exponential growth in complexity.
To illustrate this point, consider the two nodes L and R shown in Figure 1.2 with
KR + 1 and KL + 1 edge-variables, respectively. Assuming these variables are binary,
the complexity of computing the probabilities of the external variables directly using
the global constraint among the KL + KR variables is proportional to 2KL+KR . On
the other hand, if we process the local constraints of nodes L and R separately, and
then exchange the messages associated with x0 as in (1.9), the complexity is reduced
to 2KL + 2KR .
Applications
Figure 1.4 shows a general block diagram of a communication system. Branch (a) of
Figure 1.4 shows the transmitter part, which consists of channel coding, interleaving,
and modulation. The channel can have intersymbol interference, multi-user interfer-
ence, time-variations, and additive noise. Three different alternative approached for
the receiver design are shown in branches (b), (c), and (d). Branch (b) shows the
traditional non-iterative processing approach, where the signal flows in one direction
through the different receiver modules. This approach is clearly highly suboptimal be-
cause it ignores the global system structure. For example, during channel estimation

Chapter 1. Introduction 9
and channel mitigation, which may include equalization and interference cancella-
tion, the coding structure is ignored. Despite its highly sub-optimal performance,
this design is ubiquitous in practice because of its simplicity. Branch (c) shows the
optimal joint maximum-likelihood (ML) receiver, which attempts to find the most
likely transmitted sequence of information symbols given received signal. For most
non-trivial systems this approach is prohibitively complex to implement in practice.
%
&('*),+.-,/1032 45&/6&,+57 89): 2 ;3& : 2 )=<*<*>? 8,@BA 2 0C>�&=852 /32 <ED=/
FG<*>H- : +=0I2 <ED2 D=01&97 JK&97 &9D=8=&>L2 /106<*7 0I2 <EDD=<L2 /6& 89)5+.D�D,& :
>�&9FM<*>E- : +N032 <LD
>�&9FM<*>E- : +N032 <LD
>�&9FM<*>E- : +N032 <LD
? +9@ 89)5+.D�D,& :A 2 06/CJ17 <EF/O<E-�7 8N&P8N<*>�&97 8N<*>L2 D,Q
89),+.D�D,& :89),+.D�D,& :FR2 032 Q�+=032 <LD&N/60I2 FM+=0I2 <ED
89),+.D�D,& :89),+.D�D,& :&N/60I2 FM+=0I2 <EDFR2 032 Q�+=032 <LD
+=8=89-�7S+=01&P8�),+.D�D,& : FM<*>�& :
? A @ A 2 0C>�&=852 /32 <ED=/>.&N8N<*>�&97
? >L@ A 2 0C>�&=852 /32 <ED=/>.&N8N<*>�&97 %
%UTEV
%UTEV
Figure 1.4: Block diagram of a communication system.
Branch (d) shows a receiver design based on the iterative processing approach. In
this case, although each module processes the data according to its local structure,
as in the non-iterative approach in branch (b), the global structure of the system is
indirectly exploited by iteratively updating and exchanging extrinsic information be-
tween these modules. For example, the decision-directed channel estimator improves

Chapter 1. Introduction 10
its channel estimate by using the soft decisions provided by the decoder. The decoder
then uses the new channel estimate to update its soft decision output. This iterative
process is continued until a stopping criterion is reached. By doing that, the iterative
approach can closely approximate the performance of the optimal receiver with a
complexity that is roughly comparable to that of the traditional non-iterative design.
Recently, the iterative processing paradigm has been used to obtain low-complexity
solutions to many complicated problems in communication. One of the most well
known applications of this concept is turbo decoding, invented in 1993 [16], which
is the iterative decoding of two (or more) parallel concatenated convolutional codes.
Another application is the iterative decoding of low-density parity-check codes pro-
posed by Gallager in 1962 [17]. Turbo equalization, first proposed by Glavieux and
coauthors [18], performs iterative equalization and decoding. Iterative interference
cancellation and decoding was proposed by Moher and coauthors [19]. In this thesis,
we will investigate iterative channel estimation, equalization, and decoding in coded
OFDM systems.
1.2.2 Parallel Implementations
The decomposition inherent in the iterative processing paradigm not only reduces
complexity, but also facilitates the parallel and distributed implementations of itera-
tive processing algorithms. The computational tasks of exploiting the local constraints
of the nodes in the graph can be distributed among n processors working in parallel.
This distribution can be performed in two steps, by first grouping the computational
tasks into n clusters, and then assigning each of these clusters to a physical processor.
According to the message-passing algorithms the nodes must iteratively exchange
extrinsic messages along the edges of the graph. Therefore, given the graph of the
system, the mapping of tasks to processors needs to be optimized to minimize the cost
of communication between these tasks, and to achieve uniform load distribution. The
difficulty of this optimization depends on the regularity of the graph of the system.
The iterative decoding of low-density parity-check (LDPC) codes is based on de-
composing the global structure of the decoding algorithm into simple local structures

Chapter 1. Introduction 11
called bit nodes and check nodes that need to communicate with each other. In this
thesis, we will apply the above ideas to optimize the implementation of the iterative
LDPC decoding on programmable parallel architectures.
1.3 Overview
The common theme of this thesis is utilizing the idea of decomposing a global system
structure into simpler modules that iteratively exchange soft information for two pur-
poses. The first one is achieving close to optimal solutions to complicated problems.
The second one is using it as a first step towards parallel and distributed implemen-
tations of such systems. In particular, we will use this idea to perform joint channel
estimation and decoding in coded OFDM systems. Then, we will present architec-
tures and methodologies for code-independent parallel implementations of iterative
LDPC decoding.
Chapter 2 starts by presenting basic background information on modeling wireless
channels. It then introduces OFDM systems and explains the importance of coding
and interleaving in such systems to exploit frequency diversity. Chapter ?? explains
how the concept of iterative processing can be applied to exploit this already exist-
ing coding information in the channel estimation process. We present an iterative
channel estimation/equalization and decoding algorithm that exploits the global sys-
tem structure and leverage all the information that can be available to the receiver.
This algorithm can be used to blindly estimate the channel, or to track the channel
time variation on time-correlated channels. We also show how serial concatenation
with an outer LDPC code can be used to eliminate the error flooring effect caused
by the occasional misconvergence of the iterative algorithm. LDPC codes and their
iterative decoding are introduced in Chapter ??, which also presents the motivations
for parallel and programmable decoding of these codes. Methodologies for parallel
implementations of iterative LDPC decoding on programmable parallel machines are
then presented in Chapters ?? and ??. Chapter ?? concludes the thesis and suggests
directions for future work.
The original research contributions of this thesis include the following:

Chapter 1. Introduction 12
• An iterative algorithm for blindly or semi-blindly estimating the channel in
coded OFDM systems (Chapter ??) [20, 21].
• An iterative algorithm for tracking the channel time variation in coded OFDM
systems (Chapter ??) [22].
• Showing that, for the purpose of iterative channel estimation and decoding, the
Max-Log-MAP algorithm is the most attractive algorithm from both implemen-
tation and performance prospectives for SISO decoding of convolutional codes
in coded OFDM systems (Chapter ??) [20].
• Proposing the use of serial concatenation with an outer LDPC code to offer a
trade-off between latency and performance without increasing the complexity of
the iterative channel-estimation-and-decoding process, which uses only a simple
4-state convolutional code (Chapter ??) [22].
• A new low-complexity shared-memory parallel architecture and the associated
memory management scheme for programmable LDPC decoding (Chapter ??) [23,
24].
• Low-complexity algorithms for optimizing the mapping and scheduling of de-
coding tasks to processors of the proposed parallel architecture so as to decrease
the decoding latency and increase throughput (Chapter ??) [23, 24].
• Low-complexity algorithms for optimizing the mapping of decoding tasks to
processors of general-purposed message-passing parallel architectures so as to
minimize the communication cost (Chapter ??) [25, 26].
1.4 Notation
In the rest of this thesis, the following conventions hold:
• p(·) is used to denote a probability density, while P (·) is used to denote a real
probability.

Chapter 1. Introduction 13
• LLR(x) denotes the log-likelihood ratio of a binary variable x.
•∑
∼x0
indicates that the sum is over all variables except x0.
• µL→R(x0) is the soft message associated with the edge-variable x0 passed from
node L to node R.
• Vectors are denoted by lower-case bold letters.
• Matrices and frequency-domain vectors are denoted by upper-case bold letters.
• AT is the transpose of matrix A.
• A∗ is the conjugate-transpose of matrix A. When ∗ is used with a scalar, it
denotes a complex-conjugate.
• E(x) is the expectation of the random vector x.
• E(A) is the expectation of the random matrix A.
• Cov[A] is the covariance matrix of A.
• Ik is the k × k identity matrix.
• 0k×n is the k × n matrix with all elements being 0.
• diag(a1, . . . , aK) is the diagonal matrix formed by a1,. . . ,aK .
• ⊗ denotes a cyclic convolution.
• � denotes a point-wise product.
• Re(x) is the real part of x.
• Im(x) is the imaginary part of x.
• x is the time average of x.
• bxc is the largest integer smaller than or equal to x.

Chapter 1. Introduction 14
• S \ x denotes the set S with the element x excluded.
• |S| is the number of elements in the set S.
• deg(b) is the degree of node b.
• Nbr(b) is the set of neighbors of node b, where |Nbr(b)| = deg(b).

Chapter 2
Coded Orthogonal Frequency
Division Multiplexing
Dispersiveness and non-stationarity are the main difficulties associated
with wireless channels. Dispersiveness is caused by their multi-path nature,
which causes intersymbol interference (ISI). Orthogonal frequency-division multiplex-
ing (OFDM) combined with appropriate coding and interleaving is an effective tech-
nique for mitigating ISI on these channels. Coherent detection enables the use of ef-
ficient multi-amplitude modulations, but requires channel estimation at the receiver.
In coded OFDM systems, exploiting the coding information in estimating the channel
can result in significant performance improvement.
This Chapter provides some background information on coded OFDM systems in
preparation for Chapter ??. Section 2.1 gives a brief overview on wireless channels and
how they can be modeled. Multicarrier modulation techniques are then introduced in
Section 2.2. Section 2.3 reviews the fundamentals of error control coding and explains
the importance of proper coding and interleaving for wireless OFDM systems. Various
channel estimation techniques for OFDM systems are briefly reviewed in Section 2.4,
which also motivates taking advantage of the code during this process.
15

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 16
2.1 Wireless Channel Model
When transmitting a signal in a wireless environment, the signal is affected by the
geometry of the environment, the movement of the receiver or the environment, and
the carrier frequency of the signal. The more scatterers in the environment, the more
signals that arrive at the receiver. These signals arrive at different times depending
on how far the scatterers are from the receiver.
This communication channel is known as a multi-path channel [27]. At a fixed
moment of time, the channel impulse response can be characterized by
h(τ) =L−1∑
k=0
αkδ(τ − τk), (2.1)
where L is the number of resolvable paths that arrive at the receiver, which depends on
the bandwidth and the sampling rate at the receiver. The parameters αk and τk rep-
resent the attenuation and delay of the kth path, respectively. The root-mean-square
value of the delay, τrms, is called the delay spread of the channel, and τL−1 is called
the maximum delay spread. Assuming that the transmitted signal x(t) modulates a
carrier frequency fc, the received signal is then
y(t) =L−1∑
k=0
αkx(t − τk)ej2πfc(t−τk) + n(t), (2.2)
where n(t) is an additive white Gaussian noise (AWGN).
Multiple paths can arrive simultaneously at the receiver and will combine con-
structively or destructively depending on the relative phases of their waves. Using a
central limit theorem argument [7], αk is a complex Gaussian random variable [27].
When L > 1, the channel is said to be dispersive, and it exhibits frequency selectiv-
ity. This dispersiveness causes intersymbol interference (ISI), where the main cause
of distortion can be the system’s own data.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 17
2.1.1 Modeling Channel Time-Variation
In a wireless channel, the environment can change because of the movement of the
receive, or the environment itself. These changes fall into two categories: short-term
fading and long-term fading. Short-term fading is manifested as a Doppler spread
in the frequency domain, which is determined as the width of the spectrum when
a single sinusoid is transmitted [28]. The maximum Doppler frequency is fD = vfc
c,
where v is the relative speed of the receiver, c is speed of light, and fc is the carrier
frequency. The channel time correlation function and the Doppler power spectrum
are related through a Fourier transform [29]. Long-term fading or shadowing is due to
gross changes in the environment, and is caused by mountains, buildings, and other
large obstacles blocking the signal.
The absolute value of αk has a Rayleigh distribution if there is no direct path
(line-of-sight) from the transmitter to the receiver, and a Rician distribution if there
is a direct path [27]. The Rayleigh distribution has the form
pR(rk) =rk
Γk
exp
(
−r2k
2Γk
)
, (2.3)
where rk = |αk|, and Γk = E [|αk(t)|2]. The Rician distribution has the form
pR(rk) =rk
Γk
exp
(
−r2k + r2
k,0
2Γk
)
I0
(
−rkrk,0
2Γk
)
, (2.4)
where I0 is a modified zeroth order Bessel function, and rk,0 is the mean amplitude
of the line-of-sight component of the kth path. In the Rayleigh fading case, we are
often interested in the distribution of the signal power, γk = |αk|2, which is given by
p(γk) =1
2Γk
exp
(
−γk
2Γk
)
. (2.5)
Due to the long-term fading, the variance Γk is itself a random variable that has a
log-normal distribution [27]. This log-normal variation occurs on a scale of tens to
hundreds of feet, while the Rayleigh fading occurs on a scale of the wavelength of the

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 18
signal.
The power-delay profile of the channel is defined as [27]
p(τ) = E[h(t, τ)h∗(t, τ)], (2.6)
where h(t, τ) =∑L−1
k=0 αk(t)δ(τ − τk). Assuming that αi(t) is uncorrelated with αj(t)
for i 6= j, which simplifies the analysis, and has been shown to be true in most
measurements [30, 31], we obtain
p(τ) =L−1∑
k=0
E[
|αk(t)|2]
δ(τ − τk), (2.7)
=L−1∑
k=0
Γkδ(τ − τk). (2.8)
In indoor radio environments, it was found that the channel power profile is an ex-
ponentially decaying function of the excess delay, τ , and the amplitudes of individual
multipath components are Rayleigh distributed [32, 33].
A commonly used model for the time variation of the channel is the Jakes’ spec-
trum [27], where the time correlation of the channel taps is given by
ρ(δt) = J0(2πfDδt), (2.9)
where J0 is a zeroth order Bessel function, and fD is the maximum Doppler frequency.
The coherence time defined as Tc = 12πfD
is the time duration over which the
channel characteristics do not change significantly [29]. Clearly, if fD is larger, the
channel response will change more rapidly in time. Similarly, the coherence bandwidth
defined as Bc = 12πτrms
, where τrms is the delay spread of the channel, is the frequency
band over which the channel frequency response is almost constant [29]. As the
channel delay spread increases, the channel’s frequency selectivity increases, leading
to more sever ISI.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 19
2.1.2 Diversity
On frequency- or time-selective channels, error control coding by itself is not enough
to achieve low probability of error. One way to further lower the probability of
error is through diversity [27]1. The concept behind diversity is based on the fact
that the probability that two independent channels have low SNRs is smaller than
the probability that either one of the channels has a low SNR. Diversity attempts
to transmit the same information on multiple (hopefully independent) channels to
decrease the average probability of error on fading channels.
There are three basic types of diversity used in wireless systems: time diversity,
frequency diversity, and spacial diversity. In time diversity, the information is repli-
cated and spread over time in such a way that the information appears on independent
channels. Thus, for slowly time-varying channels (with relatively large coherence time
Tc), the information needs to be spread over a long period of time, which may not
be possible for latency-sensitive applications. In frequency diversity, the information
is spread across two or more independent frequency carriers. Frequency diversity is
specially attractive in wideband systems, where the channel is frequency selective
(coherence bandwidth Bc � B, where B is the bandwidth of the channel). In spa-
cial diversity, the receiver uses two or more antennas spaced half a wavelength (λ/2)
apart to ensure independent channels [27]. The required antenna spacing can even
be much larger than λ/2 in environments with low angle-spread. If the receiver is
moving, it can receive the signals arriving at different points in space at different
times. Therefore, time and spatial diversity are two sides of the same coin in that
case.
There are variations of diversity combining depending on the weighting given
to the signal received on each of the independent channels carrying the redundant
information. For example, selection diversity simply selects the largest of the received
signals. On the other hand, in maximam-ratio diversity combining, the component
channels are weighted by their respective channel SNRs. Selection diversity typically
has a 2 dB loss relative to maximum-ratio diversity combining [29, 27].
1It is worth mentioning that if the code is designed properly it can simultaneously exploit diversity
in addition to offering a coding gain.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 20
2.2 Multicarrier Modulation
Multicarrier modulation (MCM) has long been considered a candidate for modulation
on channels with sever intersymbol interference (ISI). An early use of MCM is the
1958 Kineplex modem [34] designed by the Collins Radio Company. Research in
MCM techniques can be traced back to Holsinger [35], and later to Chang [36] and
Saltzberg [37]. Multicarrier transmission systems attempt to subdivided the total
bandwidth of the ISI channel into a bank of orthogonal narrow-band subchannels.
Data are then transmitted in parallel over these subchannels, thereby avoiding high-
speed equalization and alleviating impulsive noise.
Consider an additive white Gaussian noise (AWGN) channel with frequency re-
sponse H(f) as shown in Figure 2.1, and noise variance σ2. The channel can be
partitioned into N subchannels, each with a carrier frequency fn. If N is large, the
bandwidth of each subchannel will be so small that the frequency response over it
can be approximated as constant. This flat response corresponds to ISI-free trans-
mission. Thus, each subchannel can be modeled as a flat AWGN channel with a
scalar gain H(fn) and noise variance σ2. Since the subchannels are orthogonal, each
subchannel is modulated separately, with modulation and demodulation performed
in the frequency domain.
2.2.1 DFT-Based Channel Partitioning
In 1971, Weinstein and Elbert [38] applied the discrete Fourier transform (DFT) to
multicarrier transmission systems as part of the modulation and demodulation pro-
cesses. The DFT-based approach eliminated the need for the banks of subcarrier
oscillators and coherent demodulators required by earlier frequency-division multi-
plexing techniques. It enabled a completely digital implementation that can take
advantage of recent advances in high-speed digital signal processing (DSP) and very
large scale integrated circuits (VLSI) technologies. In practical systems, fast Fourier
transform (FFT) algorithms [39], which reduce the complexity of an N -point DFT
operation from O(N 2) to O(N log N), are typically used as computationally efficient
means of domain conversion.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 21
WYX[Z.\^]�W
\\�_a`�b
WYX[Z.\�c�]�W
\�c\Cd
Figure 2.1: Channel partitioning in multicarrier modulation.
The use of FFT/IFFT for domain conversion selects the set {e−j2πfnt} as the
basis functions for transmission, where fn = nNT
, where T is the symbol period, N
is the number of subchannels, and n = 0, 1, . . . , N − 1. The set {e−j2πfnt} is also
a set of eigenfunctions of any circulant matrix. Therefore, by making the channel
impulse response matrix circulant, we achieve two additional advantages to using the
set {e−j2πfnt} as basis functions in addition to the low implementation complexity.
First, the subchannels that result from this set of basis functions are orthogonal; thus,
each can be modulated and demodulated separately. Second, these basis functions
are independent of the channel response, so the same modulator and demodulator
can be used on a variety of channels.
The impulse response of a transmission channel can be modeled as a circulant
matrix with a simple trick known as the cyclic-prefix [40]. The vector of N sampled
output of an AWGN channel with L(= ν + 1)-tap impulse response {h0, h1, . . . , hν}

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 22
can be written as
yN−1
yN−2
...
y1
y0
=
h0 h1 . . . hν 0 0 . . . 0
0 h0 h1 . . . hν 0 . . . 0...
. . . . . . . . . . . . . . . . . ....
0 . . . 0 h0 h1 . . . hν 0
0 . . . 0 0 h0 h1 . . . hν
xN−1
xN−2
...
x1
x0
xpN−1...
xpN−ν
+
nN−1
nN−2
...
n1
n0
(2.10)
y = PxN+ν + n (2.11)
where x =[
xN−1 xN−2 . . . x1 x0
]T
is the block of N channel input samples,
(xpN−1, . . . , x
pN−ν) are the last ν samples of the previous input block, and n is an
AWGN noise vector. For the purpose of computing y, the channel input can be made
to appear periodic by inserting the cyclic-prefix x =[
xN−1 xN−2 . . . xN−ν
]T
between x0 and xpN−1. The addition of this length ν cyclic-prefix causes a slight loss
of NN+ν
in information rate. However, the channel output can now be expresses as
yN−1
yN−2
...
y1
y0
=
h0 h1 . . . hν 0 . . . 0
0 h0 h1 . . . hν. . . 0
0. . . . . . . . . . . . . . . 0
0 . . . 0 h0 h1 . . . hν
hν 0 . . . 0 h0 . . . hν
.... . . . . . . . . . . . . . .
...
h1 . . . hν . . . 0 . . . h0
xN−1
xN−2
...
x1
x0
+
nN−1
nN−2
...
n1
n0
(2.12)
y = P x + n (2.13)
where the channel impulse response matrix P is now circulant as desired.
Another advantage of the cyclic-prefix is that it provides a guard interval that

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 23
prevents intersymbol interference caused by the multipath channel. This fact is evi-
dent in (2.12), where the output block y is dependent only on the current input block
x through a cyclic convolution. Note that to completely eliminate ISI and maintain
orthogonality among the subchannels, the cyclic-prefix extension has to be at least
as long as the maximum delay spread of the channel. The output of the channel in
the frequency domain can then be obtained as
Y = diag(H)X + N , (2.14)
where X = Qx,Y = Qy,N = Qn, and H = V h, where Q is an N × N DFT
matrix, and V is an N×L Vandermonde matrix with elements given by Vn,l = e−j 2π
Nnl
for n = 0, 1, . . . , N − 1 and l = 0, 1, . . . , L − 1.
Figure 2.2 shows a typical FFT-based MCM system. The incoming serial data
is first converted from serial to parallel and grouped into bn bits. Each group of
bits selects a constellation point Xn for subchannel n, where n = 0, 1, . . . , N − 1.
The block of N complex numbers is then modulated by the inverse FFT (IFFT) and
converted to time-domain serial data for transmission. The cyclic-prefix is added,
and the signal is transmitted across the ISI channel. At the front end of the receiver,
the cyclic-prefix is removed, the signal is converted back to parallel, and then to the
frequency domain via the FFT. The signal of each subchannel is then independently
equalized using a single-tap frequency equalizer with gain 1Hn
, and then passed to an
AWGN slicer to yield the detected symbol Xn.
2.2.2 DMT and OFDM
The DFT-based MCM is usually called discrete multitone (DMT) modulation. On
slowly time-varying two-way channels, such as telephone lines, DMT optimizes the
spectrum of the transmitted signal, Sx(f), across the subchannels using what is called
“water-filling” [41]. As shown in Figure 2.3, this optimization is performed by allo-
cating energy, or equivalently bits, to subchannels in proportion to their SNRs. In the
1990’s, DMT technology has been exploited in many applications, particularly, those

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 24
e�f.fg(h5g9i j gk5lYm(n*oprq*s tttttt
ttt
tttttt
tttttt
p m5l j u.i f u,v6uj w k.x v
y�z u�w.w m i
{ |H|.} sUq9pp j ~Lw9u.i� u k.k.m5l
�O��� j v6� ������
�����r�
gNh5g5i j gk9lSm(n*o� m5���9�5mpHq*sm=�Ex u.i j � m5l �
�� w m(� v6u kp j ~Lw�u�if m9� u k.k�m9lsUq�p
������ �
�� ���r�|H|.}p m9l j u�i f u=vOu�Lx v k.x v
Figure 2.2: A DFT-based MCM system.
for offering broadband access over twisted pairs. Such applications include high-bit-
rate digital subscriber lines (HDSL) [42], asymmetric digital subscriber lines (ADSL),
and very high-speed digital subscriber lines (VDSL) [43, 44].
The water-filling optimization not only exploits the frequency diversity of the
ISI channel, but is also the capacity achieving approach [41]. However, it requires
knowledge of the channel at the transmitter [45]. On broadcast channels or fast time-
varying channels, like mobile wireless channels, timely feedback to the transmitter
can be very difficult or impossible. In such cases, where the transmitter has no
knowledge of the channel, equal energy and equal number of bits are assigned to each
subchannel, as shown in Figure 2.4. When there is no water-filling optimization in a
multitone system, it is often referred to as orthogonal frequency-division multiplexing
(OFDM). Given a long enough period of time, each subchannel is subject to the same
fading statistics, and has the same average SNR. In this case, assigning an equal
number of bits to each subchannel can be shown to be appropriate via a minimax
argument - minimizing the maximum bit error rate over a set of possible SNRs on
each subchannel [46, 47].

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 25
�
�^���*����� ���I�� 9�
Figure 2.3: Water-filling optimization in DMT systems.
In a frequency-selective channel, where different subchannels have different gains,
the bit error rate (BER) of the OFDM system will be largely determined by the
few subchannels with the smallest gains. To avoid this domination by the weakest
subchannels, forward-error correction (FEC) coding across subchannels and inter-
leaving are used to exploit frequency diversity. This technique is what is referred
to as coded OFDM (COFDM). The topic of coding and how it provides diversity in
an OFDM system will be discussed in the next Section. Another way to exploit fre-
quency diversity is to spread each information symbol across multiple subchannels, as
in multicarrier code-division multiple-access (MC-CDMA) [48, 49] and block-spread
multicarrier [50]. However, unlike coded OFDM, these alternatives do not offer any
coding gain. Since the coding gain is essential for proper system operation in a
wireless fading environments, most practical wireless systems use coded OFDM or
combine coding with one of the above spreading techniques.
OFDM has been particularly successful in numerous wireless applications, where
its superior performance in multi-path environment is desirable. It has been adopted
in digital audio/video broadcasting (DAB/DVB) standards in Europe [51, 52]. A

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 26
¡�¢¤£R¥
¦K§©¨*ª¬«#¦
¯® ¨*ª¬«
ª
Figure 2.4: Transmit spectrum of an OFDM system.
particularly interesting configuration enabled by OFDM technology is the single-
frequency broadcast (SFN) network [53, 1], where many geographically separated
transmitters broadcast identical and synchronized audio or video signals to offer a
better coverage of a large region. The reception of such signals by the receiver
is equivalent to an extreme form of multi-path. Another wireless application of
OFDM is in high-speed local area networks (LANs) [54]. OFDM technology has
already been adopted in multiple broadband mobile wireless LAN standards, such as
IEEE802.11a [2], MMAC, and HIPERLAN/2 [3].
2.3 Coding Fundamentals
To transmit data at rates close to the capacity, it is necessary to introduce schemes
to correct for the noise and distortion introduced by the channel. In error-control
coding, controlled redundancy is introduced in the transmitted data for the purpose
of correcting or detecting errors. The basic principle behind error-correcting codes
is to increase the separation between possible transmitted sequences of symbols in a

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 27
bandwidth-efficient manner. In a stationary channel, increasing the Euclidean dis-
tance between sequences of symbols is sufficient to reduce the probability of error.
However, that is not enough in a fading channel. We must also increase the diversity
factor of the received signal. To do this, coding must use interleaving and be designed
specifically to exploit diversity.
OFDM is an effective technique for mitigating ISI and is typically used on wide-
band frequency-selective channels. Using the proper coding and interleaving across
subchannels is essential to exploit frequency diversity on such channels. If latency
can be afforded, coding and interleaving across OFDM symbols can further be used
to exploit time diversity or to combat bursty errors.
The simplest way to correct errors in a transmission would be to retransmit the
same symbol multiple times, and use a majority decoder at the receiver. This ap-
proach, however, is not bandwidth efficient. There are two types of codes developed
for static AWGN channels: block codes and convolutional codes (including trellis-
coded modulation). They are briefly introduced in the subsections below, along with
how they can be made appropriate for fading channels.
A rate- kn
code takes k input information bits and outputs n coded bits. In the
systematic form of the code, the input bits are transmitted as part of the output
sequence. In searching for the most likely transmitted sequence, the decoder can
use either sliced bit values (0 or 1), or the received noisy symbol values. If it uses
the sliced bits, the process is called hard-decoding, because the receiver makes ‘hard’
decisions before passing the coded data to the decoder. On the other hand, in soft-
decoding, the decoder uses the noisy received symbols. In a hard-decoding system,
some information (the actual size of error in the analog domain) is lost by the receiver.
Thus, in general, a hard decoder performs worse than a soft decoder. A soft-input
soft-output (SISO) decoder not only uses soft input information, but also produces
soft output information to be used by other modules at the receiver. This feature is
essential to the iterative processing paradigm; thus, in this thesis, we will limit our
attention to SISO decoders.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 28
2.3.1 Block Codes
In a rate- kn
block code, input data are blocked into k symbols, and each block is
mapped into an output block of n symbols called a codeword, where n > k. Only M k
of the possible Mn output blocks are legitimate codewords, where M is the number of
symbols levels. The Hamming distance between codewords is the number of symbols
where the codewords differ. A figure of merit of a block code is its minimum distance,
dmin ≤ n − k + 1 [55], which is the smallest Hamming distance between any two
codewords. At the receiver, the decoder finds the codeword that is closest in some
sense2 to the received block of n symbols corrupted with noise. In hard decoding, for
example, a block code with a minimum distance dmin can detect up to dmin −1 errors
or correct up to b 12(dmin − 1)c errors [56].
A class of binary block codes that has excellent error-correction capabilities and
low-complexity SISO decoding is the class of low-density parity-check codes [17].
Chapter ?? presents more details about these codes and their iterative soft decoding.
2.3.2 Convolutional Codes
Convolutional codes are bit-oriented codes that take a sequence of input symbols
u(D), convolve them over the field GF (2) with the generator matrix of the code
G(D), and output the sequence of coded symbols cT (D) = u(D)G(D). By introduc-
ing memory in the output symbols, the encoder restricts the possible set of legitimate
sequences. For example, consider the rate-1/2 convolutional encoder with the gen-
erator matrix G(D) =[
1 + D + D2 1 + D2]
. The recursive systematic form of
this encoder is given by G(D) =[
1 1+D2
1+D+D2
]
and is shown in Figure 2.5. This
code is a 4-state code, where the state is represented by the information bits s0 and
s1, stored in the delay elements D and D2. The memory or constraint length of this
code is m = 2. The trellis diagram, which is a state diagram with an additional time
dimension, of the 4-state recursive systematic convolutional (RSC) code is shown in
Figure 2.6. The encoder will only output sequences of symbols that match the trellis
of the code.
2Hamming distance for hard decoding, or Euclidean distance for soft decoding.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 29
It is possible for the input and output of the convolutional encoder to be continu-
ous streams. However, to improve the decoding performance and reduce the system
latency, it is more common to periodically terminate and restart the code. Over a
coding interval, the encoder starts at a given state and is forced to terminate at a
given (usually the same) state. This condition enables the decoder to optimally and
independently decode the symbols over this interval. The coding interval could, for
example, correspond to a single OFDM symbol.
°*± °E²³ ³
´�µ ¶5µ5·¶5µ=¸
Figure 2.5: A rate-1/2 4-state recursive systematic convolutional(RSC) encoder.
Trellis (or sequence) decoding of convolutional codes is based on finding the path
through the trellis that is closest in some sense3 to the received sequence. The Viterbi
algorithm (VA) [57] is an efficient dynamic programming algorithm for maximum-
likelihood sequence decoding (MLSD) of convolutional codes. The VA algorithm,
however, does not output soft information. A modified version that generates soft-
output information is called soft-output Viterbi algorithm (SOVA) [58], but its soft
output is suboptimal. The maximum a posteriori (MAP) decoding algorithm [59] and
its derivatives the Log-MAP and Max-Log-MAP decoding algorithms [60] produce
optimal soft-output information for MAP symbol or sequence detection. More details
on the optimal SISO decoding algorithms for convolutional codes are presented in
3Hamming distance for hard decoding, or Euclidean distance for soft decoding.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 30
¹Rº
º�¹
¹#¹
º#º
»9¼C½U¾¿¼�À¿ÁÂ�ÃÅÄÇÆÂ�ÃÅÄÉÈ
¹#¹º#º
¹Rº
º�¹
º#º ¹#¹
¹Rºº�¹
»5Ê ÃEË ¾�Ê Ã¿Ì Á
Figure 2.6: The trellis diagram of the 4-state RSC encoder.
Chapter ??.
2.3.3 Trellis Codes
A trellis code uses a rate-k/n convolutional encoder, but does not require a bandwidth
expansion [61]. Instead, the constellation size is expanded by a factor of 2n−k. The
constellation is then partitioned into 2n cosets with large Euclidean distance between
points within each coset. For example, Figure 2.7 shows a 16-QAM constellation that
is partitioned into 4 cosets labeled 0, 1, 2, and 3. Given b input information bits, k
bits of them are encoded by the convolutional encoder producing n coded bits that are
then used to select one of the 2n cosets. The remaining b − k bits are not coded and
are used to select one of the 2b−k points within the selected coset. The constellation
points in a coset represent parallel branches in the trellis of the code. The trellis code
increases the minimum Euclidean distance in two ways: between points within a coset
(or parallel branches) through partitioning, and between cosets through convolutional

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 31
coding. The smaller of these two distances determines the performance of the code.
ÍÍÎÎ ÏÏÐÐ
ÑÑÒÒÓÓÔÔ
Õ Õ
Õ Õ
Ö Ö
Ö Ö
×
×
×
×
Ø
Ø Ø
Ø
Ù
Ú
Figure 2.7: A 16-QAM constellation partitioned into 4 cosets.
Although the above trellis coding approach provides a large minimum Euclidean
distance, which is enough for an AWGN channel, the minimum Hamming distance is
only 1, because bits within a coset are left uncoded. Hence, if one trellis-coded symbol
is lost, this immediately results in one of more bit errors. Such codes perform poorly in
time- or frequency-selective fading channels, because they fail to exploit diversity. To
exploit diversity, an additional requirement to the large minimum Euclidean distance
is that the Euclidean distance be spread over as many symbols as possible [62], i.e.,
the code should also have a large minimum Hamming distance. For this reason,

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 32
OFDM systems do not typically use conventional multilevel trellis coding, which has
uncoded bits. Instead, they use what is called pragmatic coding, where all information
bits are encoded by a convolutional encoder, and then the coded bits are mapped to
constellation points according to a specific mapping function [1].
2.3.4 Interleaving
In general, transmission errors have a strong time/frequency correlation. Interleaving
randomizes the data so that errors in the data appear to be independently distributed.
Interleaving can be combined with coding to add diversity to the received signal, which
is a key to reducing error probability for a coded system in a time- or frequency-
selective channel. Bursty errors due to time- or frequency-correlated fading can cause
the code to fail. Interleaving distributes these errors more evenly, and potentially
over multiple codewords, giving the code a better chance of correcting the errors.
Interleaver depth should be large enough (relative to the coherence time or coherence
bandwidth of the channel) to break long burst of errors. There are many types of
interleavers including: block, convolutional, and random interleavers [63].
2.4 Channel Estimation
As long as the cyclic-prefix extension is longer than or equal to the channel maximum
delay spread, equalization in multicarrier systems is very simple . The N subchannels
can be equalized independently in the frequency domain using N single-tap equalizers
with 1Hn
tap coefficient for each. Maximum-likelihood (ML) decisions can then be
made by passing the output of the equalizer through an AWGN slicer. This approach
is called coherent detection and requires estimating the subchannel complex gains Hn,
for n = 0, 1, . . . , N − 1, at the receiver. Channel estimation at the receiver can be
avoided by using differential detection; however, that leads to about 3 dB loss in SNR
compared to coherent detection [29]. Differential detection also typically requires the
use of constant-amplitude modulation, like differential phase-shift keying (DPSK),
thereby restricting the number of bits per constellation point.

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 33
There are many techniques for estimating the channel in OFDM systems. If
the channel is changing slowly, it can be estimated periodically by sending known
OFDM pilot symbols. The channel estimates obtained using the pilot symbols are
used to detect the data OFDM symbols in between the pilot symbols. Between pi-
lot symbols, the slow channel changes can be tracked using decision-based tracking
techniques [64, 65, 66]. If the channel is changing rapidly, known pilot tones can be
transmitted in each OFDM symbol to estimate the channel. These pilot tones are
typically distributed over a two-dimensional grid with time and frequency spacings
determined by the coherence time and coherence bandwidth of the channel, respec-
tively. Estimates of the complex gains of remaining subchannels are then obtain by
interpolation [1].
To avoid bandwidth-consuming training sequences, blind channel estimation tech-
niques that require no pilots have also been suggested [67, 68, 69, 70]. However, most
of these techniques typically require averaging over a large number of OFDM symbols
to reach to a sufficiently accurate estimate of the channel. This requirement not only
increases the latency of the system, but also limits the use of these techniques to
slowly time-varying channels.
In channel estimation, there are multiple performance objectives. The first one is
to reduce the noise in the channel estimate by, for example, minimizing the estimate
mean-square error (MSE) defined as
MSE = ||h − h||2 (2.15)
where h is the channel impulse response in the time domain, and h is the channel
estimate. The second objective is to minimize of the training overhead by minimizing
the average number of pilots required to obtain a timely and sufficiently accurate es-
timate of the channel. Moreover, it is desirable to obtain a good estimate of the chan-
nel within as little number of OFDM symbols as possible, preferably, within a single
OFDM symbol. This requirement is particulary important in a packet transmission
system, such as an IEEE 802.11a wireless LAN, which requires an acknowledgment
to be sent after each packet transmission [2]. Any delay in the reception of a packet

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 34
will also delay the acknowledgement, and hence, decrease the effective throughput of
the system. To meet these objectives, in estimating the channel, the receiver must
exploit all the available system and data constraints, one of the most important which
is the coding information.
2.4.1 Exploiting the Code
As we have seen, the use of coding across subchannels is essential in wireless OFDM to
exploit frequency diversity on frequency-selective channels. Traditional coded OFDM
receivers typically ignore this coding information while estimating the channel by
separating the channel estimation process from the decoding process. Significant
performance improvements can, however, be achieved by properly combining these
two processes.
Let X be the transmitted OFDM data symbol, Y be the received OFDM symbol
including the cyclic prefix observation, and H be the channel response in the fre-
quency domain. Ideally, we would like to solve the following join ML channel and
data estimation problem:
(
X, H)
= arg maxX ,H
{
p(
Y |X, H)}
. (2.16)
However, the optimal solution to this problem is overly complex for practical imple-
mentations. Chapter ?? shows how the iterative processing paradigm can be used
to offer an attractive trade-off between performance and complexity in solving this
problem.
2.5 Remarks
This chapter provided a brief overview of wireless channels and how they can be
modeled. It also briefly introduced OFDM as an effective technique for mitigating
ISI on frequency-selective channels. Appropriate coding and interleaving are essential
to exploit frequency diversity on these channels. The receiver should attempt to take

Chapter 2. Coded Orthogonal Frequency Division Multiplexing 35
advantage of this already existing coding information in estimating or tracking the
channel, which is required for coherent detection. Low-complexity iterative algorithms
for achieving this purpose will be presented in Chapter ??.

Bibliography
[1] R. van Nee and R. Prasad, OFDM for wireless multimedia communications.
Artech House, 2000.
[2] IEEE, “Supplement to standard for telecommunications and information ex-
change between systems—LAN/MAN specific requirements—part 11: Wireless
MAC and PHY specifications: High speed physical layer in the 5-GHz band,”
P802.11a/D7.0, July 1999.
[3] ETSI, “Broadband radio access networks (BRAN); HIPERLAN type 2 technical
specifications part 1—physical layer,” DTS/BRAN030003-1, Oct. 1999.
[4] V. Tarokh, N. Sechadri, and A. R.Calderbank, “Space-time codes for high data
rate wireless communication: Performance criterion and code construction,”
IEEE Trans. Inform. Theory, vol. 44, pp. 744–765, Mar. 1998.
[5] D. Agrawal, V. Tarokh, A. Naguib, and N. Seshadri, “Space-time coded OFDM
for high data-rate wireless communication over wideband channels,” in Proc.
IEEE Vehicular Tech. Conf., (Ottawa, Canada), pp. 2232–2236, May 1998.
[6] E. Biglieri, G. Caire, and G. Taricco, “Limiting performance of block-fading chan-
nels with multiple antennas,” IEEE Trans. Inform. Theory, vol. 47, pp. 1273–
1289, May 2001.
[7] A. Papoulis, Probability, Random Variables, and Stochastic Processes. McGraw-
Hill, 3rd ed., 1991.
36

BIBLIOGRAPHY 37
[8] J. G. D. Forney, “Codes on graphs: normal realizations,” IEEE Trans. Inform.
Theory, vol. 47, pp. 520–548, Feb. 2001.
[9] J. L. Fan, Constrained Coding and Soft Iterative Decoding. Kluwer Academic
Publishers, 2001.
[10] F. R. Kschischang, B. J. Frey, and H. A. Loeliger, “Factor graphs and the sum-
product algorithm,” IEEE Trans. Inform. Theory, vol. 47, pp. 498–519, Feb.
2001.
[11] S. M. Aji and R. J. McEliece, “The generalized distributive law,” IEEE Trans.
Inform. Theory, vol. 46, pp. 325–343, Mar. 2000.
[12] R. M. Tanner, “A recursive approach to low complexity codes,” IEEE Trans.
Inform. Theory, vol. 27, pp. 533–547, Sept. 1981.
[13] N. Wiberg, Codes and Decoding on General Graphs. PhD thesis, Linkoping
Studies in Science and Technology, Sweden, 1997.
[14] S. M. Aji, G. B. Horn, and R. J. McEliece, “On the convergence of iterative
decoding on graphs with a single cycle,” in Proc. CISS 98, (Princeton), Mar.
1998.
[15] Y. Weiss, “Correctness of local probability propagation in graphical models with
loops,” Neural Comput., vol. 12, pp. 1–42, 2000.
[16] C. Berrou, A. Glavieux, and P. Thitimajshima, “Near Shannon limit error-
correction coding and decoding: turbo-codes,” in Proc. IEEE Int. Conf. Com-
mun., (Geneva, Switzerland), pp. 1064–1070, May 1993.
[17] R. G. Gallager, “Low-density parity-check codes,” IRE Trans. Inform. Theory,
vol. IT-8, pp. 21–28, Jan. 1962.
[18] A. Picart, P. Didier, and A. Glavieux, “Turbo-detection: a new approach to com-
bat channel frequency selectivity,” in Proc. IEEE Int. Conf. Commun., (Mon-
treal, Canada), pp. 1498–1502, June 1997.

38 BIBLIOGRAPHY
[19] M. Moher, “An iterative multiuser decoder for near-capacity communication,”
IEEE Trans. Commun., vol. 46, pp. 870–880, July 1998.
[20] G. Al-Rawi, T. Al-Nafouri, A. Bahai, and J. Cioffi, “Exploiting error-control
coding and cyclic-prefix in channel estimation for coded OFDM systems,” in
Proc. IEEE GlobeCom, (Taipei, Taiwan), Nov. 2002.
[21] G. Al-Rawi, T. Al-Nafouri, A. Bahai, and J. Cioffi, “Exploiting error-control cod-
ing and cyclic-prefix in channel estimation for coded OFDM systems,” Submitted
to IEEE Comm. Lett.
[22] G. Al-Rawi, T. Al-Nafouri, A. Bahai, and J. Cioffi, “An iterative receiver for
coded OFDM systems over time-varying wireless channels,” Submitted to IEEE
Int. Conf. Commun. 2003.
[23] G. Al-Rawi, J. Cioffi, R. Motwani, and M. Horowitz, “Optimizing iterative de-
coding of low-density parity check codes on programmable pipelined parallel
architectures,” in Proc. IEEE GlobeCom, vol. 5, (San Antonio, TX), pp. 3012–
3018, Nov. 2001.
[24] G. Al-Rawi, J. Cioffi, and M. Horowitz, “Iterative decoding of low-density parity-
check codes on programmable shared-memory architectures,” Submitted to IEEE
Trans. Parallel Distrib. Syst.
[25] G. Al-Rawi, J. Cioffi, and M. Horowitz, “Optimizing the mapping of low-density
parity check codes on parallel decoding architectures,” in Proc. IEEE Int. Conf.
Inform. Tech.: Coding and Computing, (Las Vegas, NV), pp. 578–586, Apr. 2001.
[26] G. Al-Rawi, J. Cioffi, and M. Horowitz, “Iterative decoding of low-density parity-
check codes on programmable message-passing architectures,” Submitted to IEEE
Trans. VLSI Syst.
[27] W. C. J. Jr., Microwave Mobile Communications. John Wiley and Sons, 1974.
[28] E. A. Lee and D. G. Messerschmitt, Digital Communication. Kluwer Academic
Publishers, 2ed ed., 1994.

BIBLIOGRAPHY 39
[29] J. G. Proakis, Digital Communications. McGraw-Hill, 4th ed., 2001.
[30] P. A. Bello, “Characterization of randomly time-variant linear channels,” IEEE
Trans. Commun. Syst., vol. CS-11, pp. 360–393, Dec. 1963.
[31] D. Cox and R. Leck, “Correlation, bandwidth, and delay spread multipath prop-
agation statistics for 910-MHz urban mobile radio channels,” IEEE Trans. Com-
mun., vol. 23, pp. 1271–1280, Nov. 1975.
[32] H. Hashemi, “The indoor radio propagation channel,” Proceedings of the IEEE,
vol. 81, pp. 943–968, July 1993.
[33] A. A. M. Saleh and R. A. Valenzuela, “A statistical model for indoor multipath
propagation,” IEEE J. Select. Areas Commun., vol. 5, pp. 128–137, Feb. 1987.
[34] R. R. Mosier and R. G. Clabaugh, “Kineplex, a bandwidth efficient binary trans-
mission system,” AIEE Trans., vol. 76, pp. 723–728, Jan. 1958.
[35] J. L. Holsinger, Digital Communication Over Fixed Time Continuous Channels
with Memory. PhD thesis, M.I.T., 1964.
[36] R. W. Chang, “Synthesis of band limited orthogonal signal for multichannel data
transmission,” Bell Syst. Tech. J., vol. 45, pp. 1775–1796, Dec. 1966.
[37] B. R. Saltzberg, “Performance of an efficient parallel data transmission system,”
IEEE Trans. Commun., vol. 15, pp. 805–813, Dec. 1967.
[38] S. B. Weinstein and P. M. Ebert, “Data transmission by frequency division mul-
tiplexing using the discrete fourier transform,” IEEE Trans. Commun., vol. 19,
pp. 628–634, Oct. 1971.
[39] R. E. Blahut, Fast Algorithms for Digital Signal Processing. Addison-Wesley,
1985.
[40] A. Peled and A. Ruiz, “Frequency domain data transmission using reduced com-
putational complexity algorithms,” in Proc. IEEE Int. Conf. Acoust., Speech,
and Signal Processing, (Denver, CO), pp. 964–967, Apr. 1980.

40 BIBLIOGRAPHY
[41] T. M. Cover and J. A. Thomas, Elements of Information Theory. John Wiley
and Sons, 1991.
[42] J. S. Chow, J. C. Tu, and J. M. Cioffi, “A discrete multitone tranceiver system
for HDSL applications,” IEEE J. Select. Areas Commun., vol. 9, pp. 895–908,
Aug. 1991.
[43] J. S. Chow, J. C. Tu, and J. M. Cioffi, “Performance evaluation of a multichan-
nel tranceiver system for ADSL and VHDSL services,” IEEE J. Select. Areas
Commun., vol. 9, pp. 909–919, Aug. 1991.
[44] “Asymmetric digital subscriber line (ADSL) metallic interface,” ANSI Standard
T.413-1995.
[45] J. A. C. Bingham, “Multicarrier modulation for data transmission: An idea
whose time has come,” IEEE Commun. Mag., vol. 28, pp. 5–14, Apr. 1990.
[46] L. H. Ozarow, S. Shamai, and A. D. Wyner, “Information theoretic considera-
tions for cellular mobile radio,” vol. 43, pp. 359–378, May 1994.
[47] S. K. Wilson, Digital Audio Broadcasting in a Fading and Dispersive Channel.
PhD thesis, Stanford University, 1994.
[48] K. Fazel and L. Papke, “On the performance of convolutionally-coded
CDMA/OFDM for mobile communication system,” in Proc. IEEE PIMRC,
pp. 468–472, Sept. 1993.
[49] G. Fettweis, “On multi-carrier code division multiple access (MC-CDMA) mo-
dem design,” in Proc. IEEE Vehicular Tech. Conf., pp. 1670–1674, June 1994.
[50] Z. Wang and G. B. Giannakis, “Wireless multicarrier communications: Where
Fourier meets Shannon,” IEEE Signal Proc. Mag., vol. 17, pp. 29–48, May 2000.
[51] ETSI, “Radio broadcasting systems: Digital audio broadcasting to mobile,
portable and fixed receivers,” ETS 300-401, Feb. 1995.

BIBLIOGRAPHY 41
[52] ETSI, “Digital video broadcasting: Framing, structure, channel coding, and
modulation,” EN 300-744, Aug. 1997.
[53] A. R. S. Bahai and B. R. Saltzberg, Multi-carrier digital communications: theory
and applications of OFDM. Kluwer Academic Publishers, 1999.
[54] R. van Nee, G. Awater, M. Morikura, H. Takanashi, M. Webster, and K. W.
Halford, “New high-rate wireless LAN standards,” IEEE Commun. Mag., vol. 37,
pp. 82–88, Dec. 1999.
[55] R. C. Singleton, “Maximum distance Q-Nary codes,” IEEE Trans. Inform. The-
ory, vol. 10, pp. 116–118, 1964.
[56] S. B. Wicker, Error Control Systems for Digital Communication and Storage.
Prentice Hall, 1995.
[57] J. G. D. Forney, “The Viterbi algorithm,” Proceedings of the IEEE, vol. 61,
pp. 268–278, Mar. 1973.
[58] J. Hagenauer and P. Hoeher, “A Viterbi algorithm with soft-decision output and
its applications,” in Proc. IEEE GlobeCom, pp. 1680–1686, Nov. 1989.
[59] L. Bahl, J. Cocke, F. Jelinek, and J. Raviv, “Optimal decoding of linear codes for
minimizing symbol error rate,” IEEE Trans. Inform. Theory, vol. 20, pp. 284–
287, Mar. 1979.
[60] P. Robertson, E. Villebrun, and P. Hoeher, “A comparison of optimal and sub-
optimal MAP decoding algorithms operating in the log domain,” in Proc. IEEE
Int. Conf. Commun., vol. 2, (Seattle, WA), pp. 1009–1013, June 1995.
[61] G. Ungerboeck, “Channel coding with multilevel/phase signals,” IEEE Trans.
Inform. Theory, vol. 28, pp. 55–67, Jan. 1982.
[62] R. D. Wesel, “Joint interleaver and trellis code design,” in Proc. IEEE GlobeCom,
vol. 2, pp. 939–943, 1997.

42 BIBLIOGRAPHY
[63] B. Vucetic and J. Yuan, Turbo Codes: Principles and Applications. Kluwer
Academic Publishers, 2000.
[64] S. K. Wilson, R. Khayata, and J. M. Cioffi, “16 QAM modulation with orthogo-
nal frequency division multiplexing in a Rayleigh-fading environment,” in Proc.
IEEE Vehicular Tech. Conf., vol. 3, (Stockholm, Sweden), pp. 1660–1664, June
1994.
[65] V. Mignone and A. Morello, “CD3-OFDM: A novel demodulation scheme for
fixed and mobile receivers,” IEEE Trans. Commun., vol. 44, pp. 1144–1151,
Sept. 1994.
[66] P. Frenger and A. Svensson, “Decision-directed coherent detection in multicarrier
systems on Rayleigh fading channels,” IEEE Trans. Vehicular Tech., vol. 48,
pp. 490–498, Mar. 1999.
[67] J. R. W. Heath and G. B. Giannakis, “Exploiting input cyclostationarity for blind
channel indentification in OFDM systems,” IEEE Trans. Signal Proc., vol. 47,
pp. 848–956, Mar. 1999.
[68] B. Muquet, M. de Courville, P. Duhamel, and V. Buzenac, “A subspace based
blind and semi-blind channel identification method for OFDM systems,” in Proc.
IEEE Workshop on Signal Proc. Advances in Wireless Comm., (Annapolis, MD),
pp. 170–173, May 1999.
[69] X. Wang and K. J. R. Liu, “Adaptive channel estimation using cyclic prefix in
multicarrier modulation system,” IEEE Comm. Lett., vol. 3, pp. 291–293, Oct.
1999.
[70] S. Zhou and G. B. Giannakis, “Finite-alphabet based channel estimation for
OFDM and related multicarrier systems,” IEEE Trans. Commun., vol. 49,
pp. 1402–1414, Aug. 2001.
Recommended