Embed Size (px)
Citation preview

Walking Gait CycleWalking Gait Cycle
Walking Gait CycleWalking Gait Cycle - 60:40 stance to swing phase - 60:40 stance to swing phase
Stance Phase: (IC) LR – MS – TST – PSWStance Phase: (IC) LR – MS – TST – PSW LR – beginning of 1st double support phaseLR – beginning of 1st double support phase
MS – foot is in full contact – adapting to env’t, MS – foot is in full contact – adapting to env’t, beginning of single support, which is of equal beginning of single support, which is of equal duration of contralateral swing phaseduration of contralateral swing phase TST – foot is preparing to toe off (TO)TST – foot is preparing to toe off (TO)
PSW – 2PSW – 2ndnd double support phase double support phase
Swing Phase: begins with TO and ends w/ ICSwing Phase: begins with TO and ends w/ IC ISW – MSW - TSWISW – MSW - TSW

Running vs. Walking Gait CyclesRunning vs. Walking Gait Cycles The Running Gait Cycle has a temporal reversal of The Running Gait Cycle has a temporal reversal of
Stance:Swing phases (40:60) as compared to Walking Stance:Swing phases (40:60) as compared to Walking Gait Cycle (60:40); the stance phase during sprinting Gait Cycle (60:40); the stance phase during sprinting may be as low as 22% of cyclemay be as low as 22% of cycle
Stance Phase: Absorption – (Mid stance) – PropulsionStance Phase: Absorption – (Mid stance) – PropulsionSwing Phase: ISW (75%) – (MSW) - TSW (25%)Swing Phase: ISW (75%) – (MSW) - TSW (25%)
Running Gait – two periods of double float in swing; Running Gait – two periods of double float in swing; refers to when neither foot is in contact w/ the ground; refers to when neither foot is in contact w/ the ground; at the beginning and at the end of each running swing at the beginning and at the end of each running swing phasephase
Walking Gait – two double support periods in stanceWalking Gait – two double support periods in stance

Float vs. SupportFloat vs. Support

Running Gait CycleRunning Gait Cycle
Step length – IC of one foot to IC of the 2Step length – IC of one foot to IC of the 2ndnd foot foot Stride length – IC of 1Stride length – IC of 1stst foot to IC of the same foot foot to IC of the same foot Cadence – number of steps in a given time; on Cadence – number of steps in a given time; on
average about 100-122 steps/min with females average about 100-122 steps/min with females averaging about 6-9 s/m higheraveraging about 6-9 s/m higher
As running Velocity increases, there is an initial As running Velocity increases, there is an initial increase in step length, followed by increased increase in step length, followed by increased cadencecadence
Stride length is limited by runner’s leg length, height, Stride length is limited by runner’s leg length, height, and ability; generally the longer the stride, the higher and ability; generally the longer the stride, the higher the velocitythe velocity
When optimum stride length is attained; further When optimum stride length is attained; further velocity increases will come from increased cadencevelocity increases will come from increased cadence

KinematicsKinematics
Kinematics of Walking and Running are much Kinematics of Walking and Running are much differentdifferent
There is an increase in joint ROM with increasing There is an increase in joint ROM with increasing velocityvelocity
Virtually no difference is found in the transverse Virtually no difference is found in the transverse and frontal plane kinematics; with most of the and frontal plane kinematics; with most of the difference occurring in the sagittal planedifference occurring in the sagittal plane• Lower C of GLower C of G• Increased speed due to increased flexion of Increased speed due to increased flexion of
hips and knees; and increased dorsiflexion of hips and knees; and increased dorsiflexion of the anklethe ankle

Knee Kinematics of RunningKnee Kinematics of Running The knee demonstrates increased flexion with increasing The knee demonstrates increased flexion with increasing
velocity, but as seen with the hip, extension decreasesvelocity, but as seen with the hip, extension decreases Absorption phase of the stance phase sees knee flexion to Absorption phase of the stance phase sees knee flexion to
accommodate ground reactive forces; walking only requires accommodate ground reactive forces; walking only requires about 10 deg of flexion vs.35 during runningabout 10 deg of flexion vs.35 during running
Max knee flexion occurs at MS, after IC, during the absorption Max knee flexion occurs at MS, after IC, during the absorption phase; this is followed sequentially by knee ext; max knee phase; this is followed sequentially by knee ext; max knee flexion during walking occurs just after TOflexion during walking occurs just after TO
Avg. Knee ROM is 63 deg during Running and 60 deg during Avg. Knee ROM is 63 deg during Running and 60 deg during walking; the major difference is that max flexion during walking walking; the major difference is that max flexion during walking only reaches an avg. of 64 deg, whereas during running it only reaches an avg. of 64 deg, whereas during running it reaches an avg. of 79 deg.; conversely, knee extension is on reaches an avg. of 79 deg.; conversely, knee extension is on average, 10 degrees less during running than during walking average, 10 degrees less during running than during walking
(-16 deg. vs -6 deg).(-16 deg. vs -6 deg).
Hip Kinematics of RunningHip Kinematics of Running
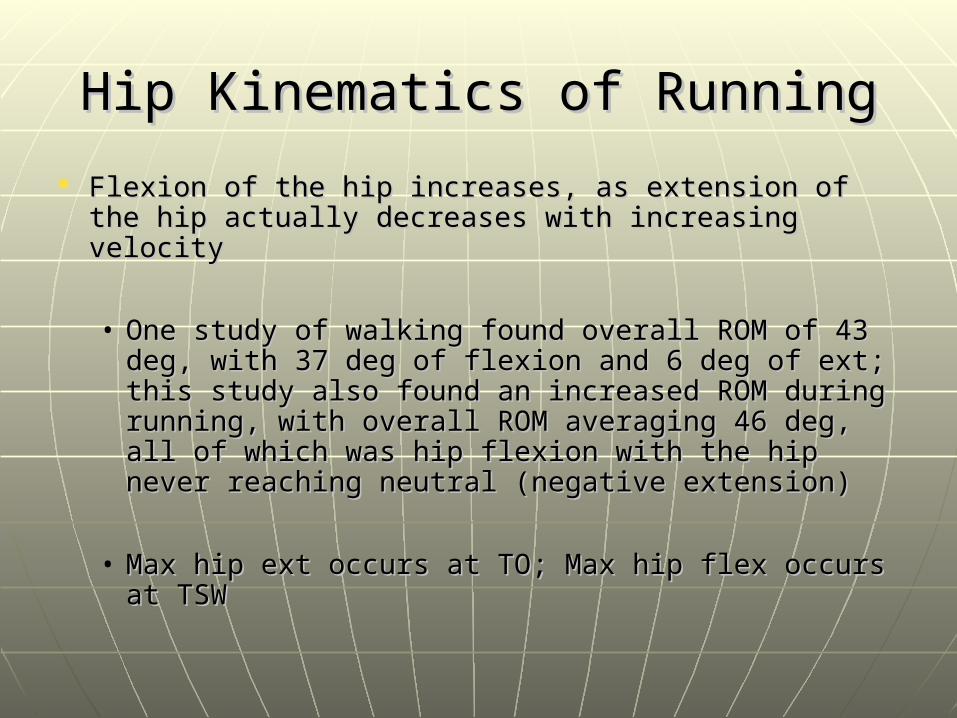
Flexion of the hip increases, as extension of the Flexion of the hip increases, as extension of the hip actually decreases with increasing velocityhip actually decreases with increasing velocity
• One study of walking found overall ROM of 43 One study of walking found overall ROM of 43 deg, with 37 deg of flexion and 6 deg of ext; deg, with 37 deg of flexion and 6 deg of ext; this study also found an increased ROM during this study also found an increased ROM during running, with overall ROM averaging 46 deg, running, with overall ROM averaging 46 deg, all of which was hip flexion with the hip never all of which was hip flexion with the hip never reaching neutral (negative extension)reaching neutral (negative extension)
• Max hip ext occurs at TO; Max hip flex occurs Max hip ext occurs at TO; Max hip flex occurs at TSWat TSW

Ankle and Foot KinematicsAnkle and Foot Kinematics
Ankle joint – primary plantar/dorsiflexorAnkle joint – primary plantar/dorsiflexor
Foot joints – including subtalar, oblique midtarsal, Foot joints – including subtalar, oblique midtarsal, longitudinal midtarsal and 5longitudinal midtarsal and 5thth ray; provide for tri- ray; provide for tri-planar pronation/supinationplanar pronation/supination• Pronation – dorsiflexion/eversion/abductionPronation – dorsiflexion/eversion/abduction• Supination – plantarflexion/inversion/adductionSupination – plantarflexion/inversion/adduction
Metatarsalphalangeal joints (MTP) are biplanar – Metatarsalphalangeal joints (MTP) are biplanar – mostly dorsiflexion/plantarflexion w/ some abd/addmostly dorsiflexion/plantarflexion w/ some abd/add

Foot OsteologyFoot Osteology

Ankle and Foot Kinematics cont.Ankle and Foot Kinematics cont.
Walking: ankle plantarflexes after IC and during LR, Walking: ankle plantarflexes after IC and during LR, followed by dorsiflexion at MS; overall ROM is approx. 30 followed by dorsiflexion at MS; overall ROM is approx. 30 deg (18 plantarflex/12dorsiflex)deg (18 plantarflex/12dorsiflex)
Running: overall ankle ROM of 50 deg; Running: overall ankle ROM of 50 deg; • At IC (rearfoot in most), ankle undergoes rapid At IC (rearfoot in most), ankle undergoes rapid
dorsiflexion during absorption (pronation)dorsiflexion during absorption (pronation)• Supination is limited due to diminished time of Supination is limited due to diminished time of
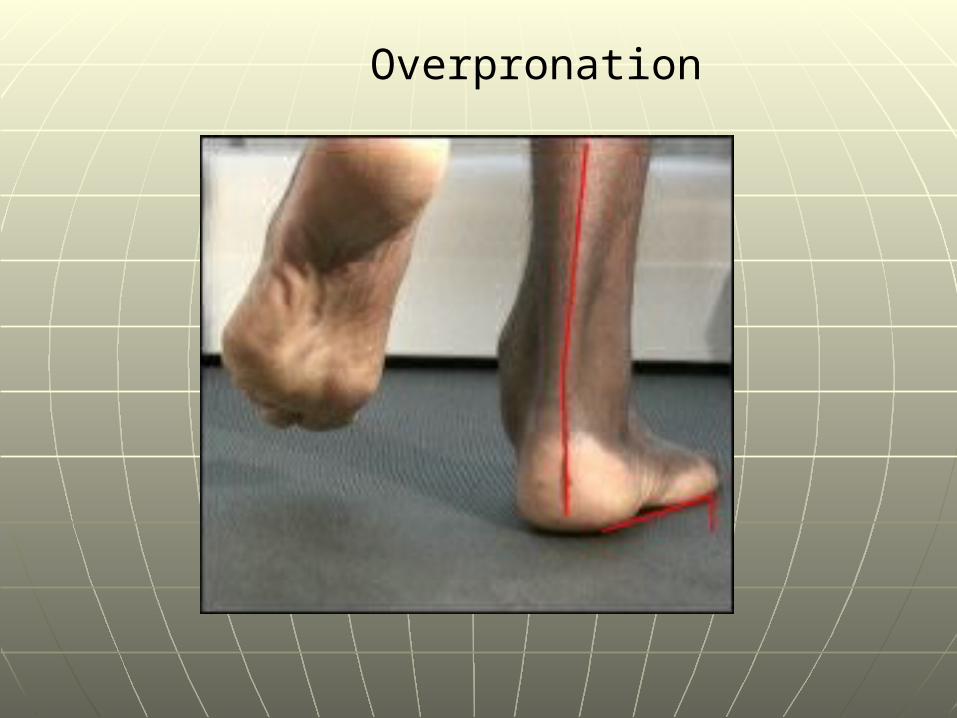
plantarflexion, and pronation is increasedplantarflexion, and pronation is increased• May lead to excessive pronation injuriesMay lead to excessive pronation injuries• Running shoes or orthotics may limit this excessive Running shoes or orthotics may limit this excessive
pronation, and allow for more supination, and thus a pronation, and allow for more supination, and thus a more rigid foot for propulsionmore rigid foot for propulsion
• A pronated subtalar joint allows the foot to become the A pronated subtalar joint allows the foot to become the “mobile adapter”; whereas a supinated subtalar joint “mobile adapter”; whereas a supinated subtalar joint serves to lock the midtarsal joints, creating a rigid lever serves to lock the midtarsal joints, creating a rigid lever to better serve propulsionto better serve propulsion
Overpronation
Windlass MechanismWindlass Mechanism
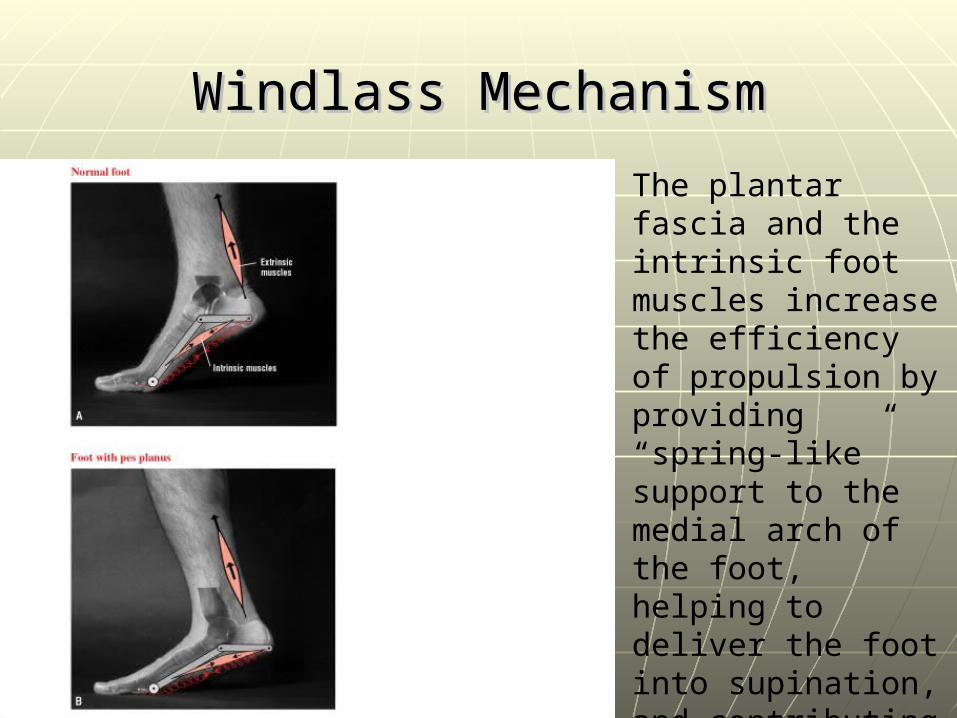
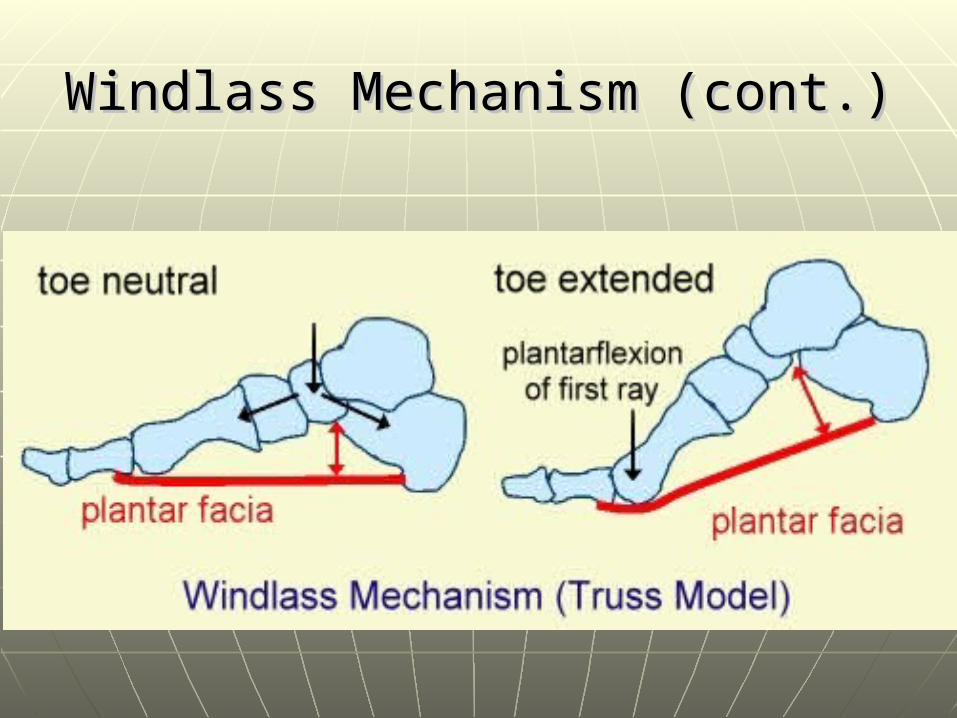
The plantar fascia and the intrinsic foot muscles increase the efficiency of propulsion by providing “spring-like” support to the medial arch of the foot, helping to deliver the foot into supination, and contributing an elastic tension.
Windlass Mechanism (cont.)Windlass Mechanism (cont.)
Lower Extremity Kinematics of RunningLower Extremity Kinematics of Running
At IC, the pelvis, femur and tibia begin to At IC, the pelvis, femur and tibia begin to internally rotate; int. rotation lasts through LR internally rotate; int. rotation lasts through LR until MS; this everts and unlocks the subtalar until MS; this everts and unlocks the subtalar joint, oblique and longitudinal midtarsal joints and joint, oblique and longitudinal midtarsal joints and in turn absorbs shock (pronation)in turn absorbs shock (pronation)
External Rotation of the pelvis, femur and tibia External Rotation of the pelvis, femur and tibia begin following MS, causing inversion and begin following MS, causing inversion and subtalar and mid foot locking, creating the rigid subtalar and mid foot locking, creating the rigid lever for propulsionlever for propulsion
All lower extremity joints work together during All lower extremity joints work together during walking/running to provide a biomechanically walking/running to provide a biomechanically efficient means of locomotionefficient means of locomotion
These joints depend on each other and upon These joints depend on each other and upon muscular action to carry out walking or runningmuscular action to carry out walking or running

Lower Extremity Kinematics of Running (cont.)Lower Extremity Kinematics of Running (cont.)
Metatarsal Break-Metatarsal Break-
the oblique line the oblique line drawn across the drawn across the metatarsal heads. metatarsal heads. This oblique axis This oblique axis promotes hind foot promotes hind foot inversion during toe inversion during toe off, which off, which contributes to contributes to external rotation of external rotation of the entire stance the entire stance legleg

Lower Extremity KinematicsLower Extremity Kinematics

Lower Extremity KineticsLower Extremity Kinetics Kinetics – the study of forces that cause movement, Kinetics – the study of forces that cause movement,
both internally (muscular) and externally (ground both internally (muscular) and externally (ground reactive forces)reactive forces)
As compared to walking, running increases muscle As compared to walking, running increases muscle activity in all musclesactivity in all muscles
Ground reactive forces – measured with a force plate Ground reactive forces – measured with a force plate system – demonstrates that vertical reactive forces system – demonstrates that vertical reactive forces are the most significant in runningare the most significant in running
In rearfoot or heel strikers (80% of runners), there is In rearfoot or heel strikers (80% of runners), there is a “two-bump” force plate appearance with one a “two-bump” force plate appearance with one occurring in the rearfoot during loading response occurring in the rearfoot during loading response and one in the forefoot during propulsionand one in the forefoot during propulsion
Walking produces GRF of 1.3-1.5x body weightWalking produces GRF of 1.3-1.5x body weight Running produces GRF of 3-4x body weightRunning produces GRF of 3-4x body weight

Clinical NoteClinical Note
Running injuries typically occur as a result of volume trainingRunning injuries typically occur as a result of volume training With 3-4x body weight with each impact, 50-70 steps per foot With 3-4x body weight with each impact, 50-70 steps per foot
per minute, 300-900 times per mile, the cumulative load can per minute, 300-900 times per mile, the cumulative load can be measured in tonsbe measured in tons
Stress fractures occur as a result of high volume training, Stress fractures occur as a result of high volume training, combined with inadequate rest and recovery and/or combined with inadequate rest and recovery and/or biomechanical flawsbiomechanical flaws
Observed running injuries often occur at sites that mirror areas Observed running injuries often occur at sites that mirror areas of peak force plate measuresof peak force plate measures
Placing a runner in a cushioning shoe may minimize peak Placing a runner in a cushioning shoe may minimize peak force; however, the extra shock absorbing materials built into force; however, the extra shock absorbing materials built into the midsole may result in excessive pronation in some runners, the midsole may result in excessive pronation in some runners, both due to less restriction of pronation and possibly due to both due to less restriction of pronation and possibly due to increased moment arm on which GRFs actincreased moment arm on which GRFs act

Stress FracturesStress Fractures

Running EconomyRunning Economy
Measured in terms of Submaximal Metabolic Measured in terms of Submaximal Metabolic Energy Expenditure (VO2submax), running Energy Expenditure (VO2submax), running economy is a method by which running economy is a method by which running biomechanics are studied to determine their biomechanics are studied to determine their affect on running performanceaffect on running performance
It is hypothesized that some variations in It is hypothesized that some variations in economy might be due to differences in genetic economy might be due to differences in genetic factors that cannot be changed through factors that cannot be changed through technique adjustments or trainingtechnique adjustments or training
Other factors that are thought to contribute Other factors that are thought to contribute include motor unit recruitment, anatomical include motor unit recruitment, anatomical mechanical advantage and movement skillmechanical advantage and movement skill
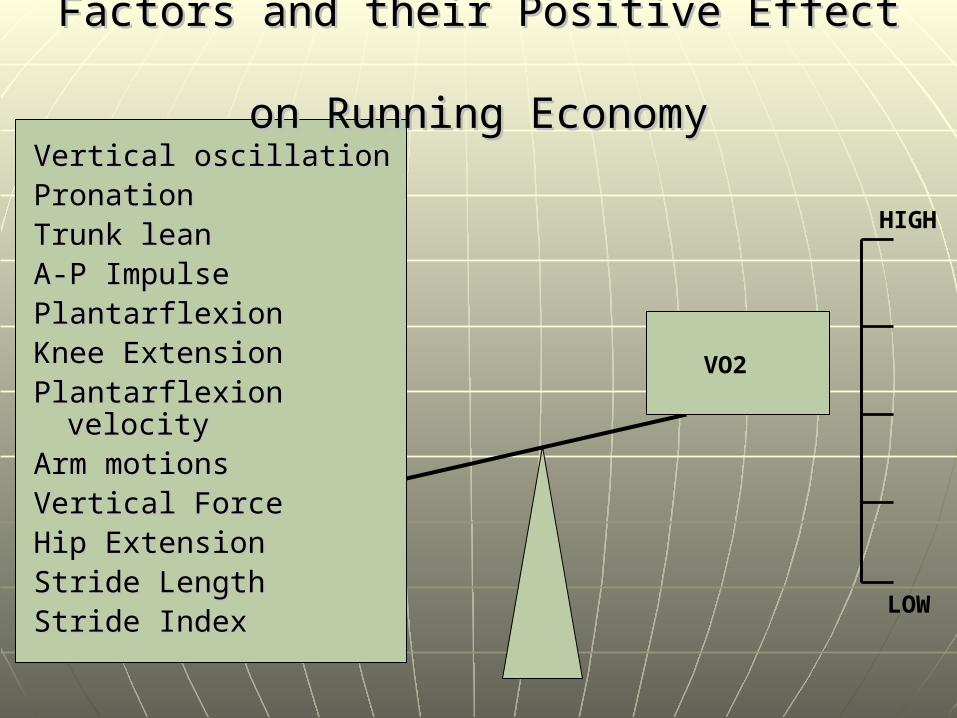
Factors and their Positive Effect Factors and their Positive Effect on Running Economyon Running Economy
Vertical oscillationVertical oscillationPronationPronationTrunk leanTrunk leanA-P ImpulseA-P ImpulsePlantarflexionPlantarflexionKnee ExtensionKnee ExtensionPlantarflexion velocityPlantarflexion velocityArm motionsArm motionsVertical ForceVertical ForceHip ExtensionHip ExtensionStride LengthStride LengthStride IndexStride Index
VO2
HIGH
LOW
Running Economy (cont.)Running Economy (cont.)
It is likely that Running Economy is directly effected by It is likely that Running Economy is directly effected by running mechanicsrunning mechanics
However, it is not known how much running performance However, it is not known how much running performance can be enhanced by altering a runner’s technique or stylecan be enhanced by altering a runner’s technique or style
Many running related movement patterns that may seem Many running related movement patterns that may seem uneconomical or sub-optimal may be as a result of an uneconomical or sub-optimal may be as a result of an adaptation to a structural or functional anomaly; where adaptation to a structural or functional anomaly; where alteration of that pattern may diminish economy and/or alteration of that pattern may diminish economy and/or increase risk of injuryincrease risk of injury
External factors that can influence economy include shoe External factors that can influence economy include shoe weight, midsole composition, wind velocity, materials and weight, midsole composition, wind velocity, materials and slope of running surface. These have been identified and slope of running surface. These have been identified and are relatively easy to measure.are relatively easy to measure.
Identifying running styles or techniques that can Identifying running styles or techniques that can predictably result in economy changes is very difficultpredictably result in economy changes is very difficult

ReferencesReferences
O’Connor, F and Wilder, R (2001). Textbook of O’Connor, F and Wilder, R (2001). Textbook of Running Medicine, McGraw Hill.Running Medicine, McGraw Hill.
Neumann, D.A. (2002). Kinesiology of the Neumann, D.A. (2002). Kinesiology of the Musculoskeletal System. St. Louis, Missouri. Musculoskeletal System. St. Louis, Missouri. Mosby.Mosby.
McGinnis, P.M. (2005). Biomechanics of Sport and McGinnis, P.M. (2005). Biomechanics of Sport and Exercise 2Exercise 2ndnd ed. Champaign, IL. Human Kinetics. ed. Champaign, IL. Human Kinetics.
Cavanagh, P.R. (1990). Biomechanics of Distance Cavanagh, P.R. (1990). Biomechanics of Distance Running. Champaign, IL. Human KineticsRunning. Champaign, IL. Human Kinetics





























