Embed Size (px)
DESCRIPTION
vib. mecanicas
Citation preview

VIBRACIONES MECÁNICAS (I parte)CAROLINA HERRERA M
INGENIERA CIVIL MECÁNICA
UNIVERSIDAD DE LA SERENA

I. Fundamentos de la vibración
IMPORTANCIA DEL ESTUDIO DE LA VIBRACIÓN
La mayoría de las actividades humanasimplican vibración en una u otra forma.
La literatura abunda en relatos de fallas desistemas provocadas por resonancia y vibraciónexcesiva de los componentes y sistemas.
Uno de los propósitos importantes del estudiode la vibración es reducirla mediante el diseñoapropiado de máquinas y sus montajes.
I. Fundamentos de la vibración

Conceptos básicosVibración: Movimiento de una partícula o de uncuerpo que oscila alrededor de su posición deequilibrio.
Elementos sist. Vibratorio: un medio paraalmacenar energía potencial (resorte o elasticidad),un medio para conservar energía cinética (masa oinercia) y un medio por el cual la energía se pierdegradualmente (amortiguador).
Grados de libertad: El mínimo de coordenadasindependientes requerido para determinar porcompleto todas las partes de un sistema en cualquierinstante de tiempo define la cantidad de grados delibertad del sistema.
I. Fundamentos de la vibración

Elementos del resorteTipo de eslabón mecánico. Cualquier cuerpo omiembro deformable puede considerarse comoresorte.
Un resorte es lineal si el alargamiento oacortamiento de longitud x está relacionada con lafuerza aplicada:
𝑭 = 𝒌𝒙
k: cte. Rigidez del resorte.
x: longitud del resorte.
El trabajo realizado (U) al deformar un resorte sealmacena como deformación o energía potencialen el resorte y está dada por:
𝑼 =𝟏
𝟐𝒌𝒙𝟐
I. Fundamentos de la vibración

Elementos del resorteLa mayoría de los resortes que se utilizan ensistemas prácticos presentan una relación fuerza-deflexión no lineal (deflexiones grandes), estándadas por:
𝑭 = 𝒂𝒙 + 𝒃𝒙𝟑 , 𝒂 > 0
𝑎: cte. Lineal.
b: cte. No lineal.
𝑏 > 0, 𝑟𝑒𝑠𝑜𝑟𝑡𝑒 𝑑𝑢𝑟𝑜
𝑏 = 0, 𝑟𝑒𝑠𝑜𝑟𝑡𝑒 𝑙𝑖𝑛𝑒𝑎𝑙
𝑏 < 0, 𝑟𝑒𝑠𝑜𝑟𝑡𝑒 𝑠𝑢𝑎𝑣𝑒.
I. Fundamentos de la vibración

Ejemplo 1CONSTANTE DE RESORTE EN UNA VARILLA
𝛿 =𝛿
𝑙𝑙 = 휀𝑙 =
𝜎𝑙
𝐸=
𝐹𝑙
𝐴𝐸
휀 =𝑐𝑎𝑚𝑏𝑖𝑜 𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑
𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑖𝑛𝑖𝑐𝑖𝑎𝑙=
𝛿
𝑙: deformación unitaria
𝜎 =𝑓𝑢𝑒𝑟𝑧𝑎
á𝑟𝑒𝑎=
𝐹
𝐴: esfuerzo inducido en varilla
𝒌 =𝒇𝒖𝒆𝒓𝒛𝒂
𝒅𝒆𝒇𝒍𝒆𝒙𝒊ó𝒏 𝒓𝒆𝒔𝒖𝒍𝒕𝒂𝒏𝒕𝒆=
𝑭
𝜹=
𝑨𝑬
𝒍

Ejemplo 2CONSTANTE DE RESORTE EN UNA VIGA EN VOLADIZO
La masa de la viga es despreciable.
F=W=mg
𝛿 =𝑊𝑙3
3𝐸𝐼
𝒌 =𝒇𝒖𝒆𝒓𝒛𝒂
𝒅𝒆𝒇𝒍𝒆𝒙𝒊ó𝒏 𝒓𝒆𝒔𝒖𝒍𝒕𝒂𝒏𝒕𝒆=
𝑭
𝜹=
𝟑𝑬𝑰
𝒍𝟑

Combinación de resortes
SISTEMA EN PARALELO
Cuando se aplica una carga F, el sistemaexperimenta una deflexión estática 𝛿𝑠𝑡.
Como están en paralelo la deflexión es lamisma, pero las ctes. K son diferentes,dependiendo de los resortes, por lo tanto:
𝑭 = 𝒌𝟏𝜹𝒔𝒕 + 𝒌𝟐𝜹𝒔𝒕 +⋯ .+𝒌𝒏𝜹𝒔𝒕
𝑭 = 𝒌𝒆𝒒𝜹𝒔𝒕ya que, factorizando:
𝑘𝑒𝑞 = 𝑘1+ 𝑘2+…+ 𝑘𝑛
I. Fundamentos de la vibración

Combinación de resortes
SISTEMA EN SERIE
Cuando se aplica una carga F, los resortesexperimentan deflexiones distintas, por lotanto, para obtener deflexión estática total:
𝜹𝒔𝒕= 𝜹𝟏 + 𝜹𝟐 +⋯+ 𝜹𝒏
𝟏
𝒌𝒆𝒒=
𝟏
𝒌𝟏+
𝟏
𝒌𝟐+⋯+
𝟏
𝒌𝒏
𝑭 = 𝒌𝒆𝒒𝜹𝒔𝒕
I. Fundamentos de la vibración

Elementos de masa o inerciaMASAS TRASLACIONALES CONECTADAS CON UNA BARRA RÍGIDA
Consideremos masas fijas en una barra rígida pivoteadaen un extremo. Se puede suponer que la masasequivalente está localizada en cualquier punto a lo largode la barra.
Masa equivalente esta en la ubicación de la masa 𝑚1.
Las velocidades de las masas 𝑚2( 𝑥2) y 𝑚3( 𝑥3) estaránen función de la velocidad de la masa 𝑚1 ( 𝑥1 ) ,suponiendo pequeños desplazamientos angulares de labarra:
𝒙𝟐 =𝒍𝟐
𝒍𝟏 𝒙𝟏, 𝒙𝟑 =
𝒍𝟑
𝒍𝟏 𝒙𝟏
𝒙𝒆𝒒 = 𝒙𝟏
I. Fundamentos de la vibración
Igualando energía cinética del sistema de las 3 masascon la del sistema masa equivalente:
𝟏
𝟐𝒎𝟏 𝒙𝟏
𝟐+𝟏
𝟐𝒎𝟐 𝒙𝟐
𝟐 +𝟏
𝟐𝒎𝟑 𝒙𝟑
𝟐=𝟏
𝟐𝒎𝒆𝒒 𝒙𝒆𝒒
𝟐
𝒎𝒆𝒒 = 𝒎𝟏 +𝒍𝟐
𝒍𝟏
𝟐𝒎𝟐 +
𝒍𝟑
𝒍𝟏
𝟐𝒎𝟑

Elementos de masa o inerciaMASAS TRASLACIONALES Y ROTACIONALES ACOPLADAS
Una masa m que rota a una velocidad 𝑥 acoplada aotra masa ( de momento de inercia de masa 𝐽𝑜 )querota a una velocidad θ.
CASO 1: masa traslacional equivalente
E. cinética: 𝑇 =1
2𝑚 𝑥2 +
1
2𝐽𝑜 𝜃2
E. cinética eq.: 𝑇𝑒𝑞 =1
2𝑚𝑒𝑞 𝑥𝑒𝑞
2
Dado que 𝑥𝑒𝑞 = 𝑥 y 𝜃 = 𝑥
𝑅
1
2𝑚𝑒𝑞 𝑥𝑒𝑞
2 =1
2𝑚 𝑥2+
1
2𝐽𝑜
𝑥
𝑅
2→ 𝑚𝑒𝑞 = 𝑚 +
𝐽𝑜
𝑅
I. Fundamentos de la vibración
CASO 2: masa rotacional equivalente
𝜃𝑒𝑞 = 𝜃 y 𝑥 = 𝜃𝑅
1
2𝐽𝑒𝑞 𝜃2 =
1
2𝑚 𝜃𝑅
2+
1
2𝐽𝑜 𝜃2
𝐽𝑒𝑞 = 𝐽𝑜 +𝑚𝑅2

Ejemplo 3
MASA EQUIVALENTE DE UN SISTEMACuando la masa m se desplaza una distancia x, la polea y el eslabón 1giran en un ángulo 𝜽𝒑 = 𝜽𝟏 =
𝒙
𝒓𝒑
El eslabón 2 y el cilindro se desplacen una distancia 𝒙𝟐 =𝜽𝒑𝒍𝟏 =
𝒙𝒍𝟏
𝒓𝒑
El cilindro gira en un ángulo 𝜃𝑐 =𝑥2
𝑟𝑐=
𝑥𝑙1
𝑟𝑝𝑟𝑐
𝑇 =1
2𝑚 𝑥2 +
1
2𝐽𝑝 𝜃𝑝
2 +1
2𝐽1 𝜃1
2 +1
2𝑚2 𝑥2
2 +1
2𝐽𝑐 𝜃𝑐
2 +1
2𝑚𝑐 𝑥2
2
𝐽𝑐 =𝑚𝑐𝑟𝑐
2
2y 𝐽1 =
𝑚1𝑙12
3
𝑇 =1
2𝑚𝑒𝑞 𝑥2
𝑚𝑒𝑞 = 𝑚 +𝐽𝑝
𝑟𝑝2 +
1
3
𝑚1𝑙12
𝑟𝑝2 +
𝑚2𝑙12
𝑟𝑝2 +
1
2
𝑚𝑐𝑙12
𝑟𝑝2 +𝑚𝑐
𝑙12
𝑟𝑝2
I. Fundamentos de la vibración

Elementos de amortiguamiento
Mecanismo mediante el cual la energía vibratoria seconvierte en calor o sonido.
El amortiguador no tiene masa ni elasticidad.
• Viscoso: un sist. Vibra en un medio fluido. La fuerza deamortiguamiento es proporcional a la velocidad delcuerpo vibratorio.
• Coulomb: resultado de fricción entre superficies secas.Fuerza de amortiguamiento es de magnitud cte. Pero endirección opuesta a la del movimiento del cuerpovibratorio.
• Histerético: cuando u n material se deforma.Amortiguamiento no lineal. Fuerza de amortiguamientoes proporcional a la amplitud de movimiento.
I. Fundamentos de la vibración

Combinación de amortiguadores
AMORTIGUADORES EN SERIE
𝑐𝑒𝑞 = 𝑐1 + 𝑐2 +⋯+ 𝑐𝑛
AMORTIGUADORES EN PARALELO
1
𝑐𝑒𝑞=
1
𝑐1+1
𝑐2+⋯+
1
𝑐𝑛
I. Fundamentos de la vibración

Movimiento armónico simpleMECANISMO DE YUGO ESCOCÉS
Distancia: 𝑥 = 𝐴 sin𝜔𝑡
Velocidad: 𝑑𝑥
𝑑𝑡= 𝜔𝐴 cos𝜔𝑡
Aceleración: 𝑑2𝑥
𝑑𝑡2= −𝜔2𝐴 sin𝜔𝑡 = −𝜔2𝑥
El movimiento armónico es el tipo más simple demovimiento periódico.
La manivela de radio A gira alrededor del punto O. el otroextremo de la manivela P se desliza en una barraranurada, la cual se mueve con un movimiento de vaivénen la guía vertical R. cuando la manivela gira a unavelocidad angular ω, el extremo del eslabón ranurado y lamasa m se desplazan a una distancia x ( en un tiempo t)
I. Fundamentos de la vibración

Definiciones y terminologíaCiclo: repetición de fenómeno periódico, quetranscurrido tiempo determinado, el sistemavuelve a su configuración anterior.
Amplitud: desplazamiento máximo de uncuerpo vibratorio a partir de su posición deequilibrio.
Periodo de oscilación: es el tiempo que tarda
en repetirse la vibración. 𝜏 =2π
ω
Frecuencia de oscilación: cantidad de ciclospor unidad de tiempo (frecuencia lineal).
𝑓 =1
𝜏=
𝜔
2𝜋
Ángulo de fase: ángulo de diferencia entre dosmovimientos vibratorio, ϕ:
𝑥1 = 𝐴1 sin𝜔𝑡
𝑥2 = 𝐴2 sin 𝜔𝑡 + ϕ
Frecuencia natural: frecuencia de un sistemael cual oscila sin la acción de fuerzas externas.
Resonancia: fenómeno donde la frecuencianatural del sistema coincide con las frecuenciasde las vibraciones forzadas..
I. Fundamentos de la vibración

II. Vibración libre de sistemas
Un sistema posee vibración libre cuando oscilasólo por una perturbación inicial sin que actúenfuerzas externas más adelante.
Un sistema de un grado de libertad, es aquelque con una coordenada (x) puede especificarla posición de la masa en cualquier momento.
No hay elemento alguno que disipe energíadurante el movimiento, la amplitud delmovimiento es contante, es un sistema noamortiguado.
II. Vibración libre de sistemas

Vibración libre de un sistema traslacional
Si una masa m se desplaza una distanciax(t) cuando una fuerza resultante F(t)actúa en ella en la misma dirección:
𝐹 𝑡 = 𝑚𝑑2𝑥
𝑑𝑡2= 𝑚 𝑥 → Traslación
𝑀 𝑡 = 𝐽 𝜃 → Rotación
II. Vibración libre de sistemas
ECUACIÓN DE MOVIMIENTO
𝑭 𝒕 = −𝒌𝒙 = 𝒎 𝒙𝒎 𝒙 + 𝒌𝒙 = 𝟎
Principio de conservación de energía
T+U= constante
𝑇 =1
2𝑚 𝑥2 → E. Cinética
𝑈 =1
2𝑘𝑥2 → E. Potencial

Vibración libre de un sistema traslacional
En reposo, la longitud del resorte es 𝑙0 + 𝛿𝑒𝑠𝑡
𝑊 = 𝑚𝑔 = 𝑘𝛿𝑒𝑠𝑡 → Equilibrio estático
Si la masa se reflexiona una distancia +x:
𝑚 𝑥 = −𝑘 𝑥 + 𝛿𝑒𝑠𝑡 +𝑊
Por lo tanto la ecuación de movimiento:
𝑚 𝑥 + 𝑘𝑥 = 0
II. Vibración libre de sistemas
ECUACIÓN DE MOVIMIENTO EN POSICIÓN VERTICAL

Vibración libre de un sistema traslacional
Suponiendo:
𝑥 𝑡 = 𝐶𝑒𝑠𝑡
Donde C y s son ctes. Y sustituyendo estaecuación en la ecuación de movimiento:
𝐶 𝑚𝑠2 + 𝑘 = 0
Donde C no puede ser 0
𝑚𝑠2 + 𝑘 = 0
𝑠 = ± −𝑘
𝑚
1 2
= ±𝑖𝜔𝑛
II. Vibración libre de sistemas
SOLUCIÓNDonde 𝑖 = −1 1 2
𝝎𝒏 =𝒌
𝒎
𝟏 𝟐→ Frecuencia Natural
Ecuación general de la ecuación de movimiento:
𝑥 𝑡 = 𝐶1𝑒𝑖𝜔𝑛𝑡 + 𝐶2𝑒
−𝑖𝜔𝑛𝑡
𝐶1 y 𝐶2 son ctes.
𝑒±𝑖𝛼𝑡 = cos𝛼𝑡 ± 𝑖 sin 𝛼𝑡
𝒙 𝒕 = 𝑨𝟏 𝐜𝐨𝐬𝝎𝒏𝒕 + 𝑨𝟐 𝐬𝐢𝐧𝝎𝒏𝒕
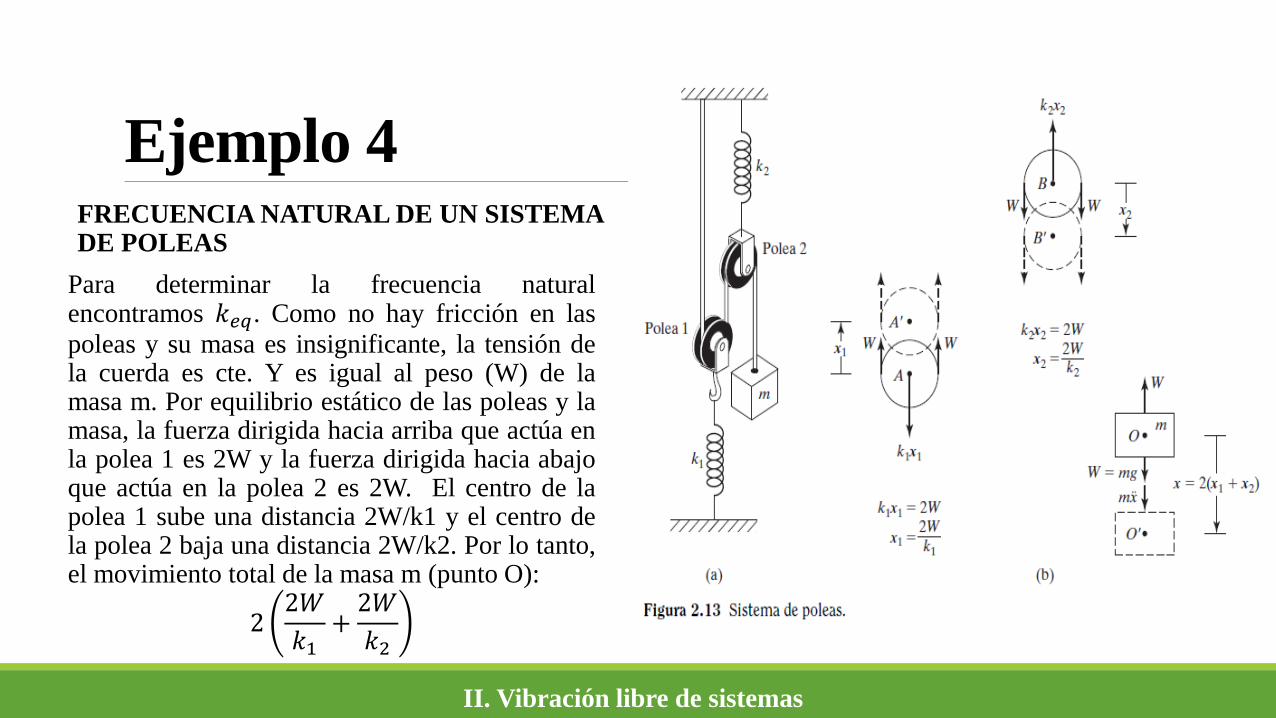
Ejemplo 4
Para determinar la frecuencia naturalencontramos 𝑘𝑒𝑞. Como no hay fricción en las
poleas y su masa es insignificante, la tensión dela cuerda es cte. Y es igual al peso (W) de lamasa m. Por equilibrio estático de las poleas y lamasa, la fuerza dirigida hacia arriba que actúa enla polea 1 es 2W y la fuerza dirigida hacia abajoque actúa en la polea 2 es 2W. El centro de lapolea 1 sube una distancia 2W/k1 y el centro dela polea 2 baja una distancia 2W/k2. Por lo tanto,el movimiento total de la masa m (punto O):
22𝑊
𝑘1+2𝑊
𝑘2
II. Vibración libre de sistemas
FRECUENCIA NATURAL DE UN SISTEMA DE POLEAS

Ejemplo 4
Si sabemos que 𝐹 = 𝑘𝑥 → 𝑥 =𝐹
𝑘𝑊
𝑘𝑒𝑞= 4𝑊
1
𝑘1+
1
𝑘2=4𝑊 𝑘1 + 𝑘2
𝑘1𝑘2
𝑘𝑒𝑞 =𝑘1𝑘2
4 𝑘1 + 𝑘2
Por lo tanto, la frecuencia natural esta dada por
𝜔𝑛 =𝑘𝑒𝑞
𝑚
1 2=
𝑘1𝑘2
4𝑚 𝑘1+𝑘2
1 2rad/s
𝑓𝑛 =𝜔𝑛
2𝜋=
1
4𝜋
𝑘1𝑘2
𝑚 𝑘1+𝑘2
1 2ciclos/s
II. Vibración libre de sistemas
FRECUENCIA NATURAL DE UN SISTEMA DE POLEAS

Vibración libre de un sistema torsional𝑀𝑡 =
𝐺𝐼𝑜
𝑙𝜃
Donde:
𝑀𝑡: par de torsión que produce la torsión θ.
G: módulo de cortante.
l: longitud de la flecha.
𝐼𝑜: momento polar de inercia de sección transversal de la flecha:
𝐼𝑜 =𝜋𝑑4
32
kt: cte resorte torsional. Comportamiento de resorte:
𝑘𝑡 =𝑀𝑡
𝜃=𝐺𝐼𝑜𝑙
=𝜋𝐺𝑑4
32𝑙
II. Vibración libre de sistemas

Vibración libre de un sistema torsionalECUACIÓN DE MOVIMIENTO
La ecuación de movimiento angular se deriva aplicandola segunda ley de Newton:
𝐽𝑜 𝜃 + 𝑘𝑡𝜃 = 0
Por lo tanto, la frecuencia circular natural del sistematorsional es:
𝜔𝑛 =𝑘𝑡𝐽𝑜
1 2
I. Fundamentos de la vibración
El periodo y la frecuencia de vibración:
𝜏𝑛 = 2𝜋𝐽𝑜𝑘𝑡
1 2
𝑓𝑛 =1
2𝜋
𝑘𝑡𝐽0
1 2

Vibración libre con amortiguamiento viscosoECUACIÓN DE MOVIMIENTO
La fuerza de amortiguamiento viscoso F esproporcional a la velocidad 𝑥 o v y se expresa:
𝐹 = −𝑐 𝑥
Donde c es la cte. De amortiguamiento o coef. Deamortiguamiento viscoso y el signo indica que la fuerzade amortiguamiento se opone a la dirección de lavelocidad. Considerando la figura, si x se mide a partirde la posición de equilibrio de la masa m, aplicando laley de Newton da la ecuación de movimiento:
𝑚 𝑥 = −𝑐 𝑥 − 𝑘𝑥𝑚 𝑥 + 𝑐 𝑥 + 𝑘𝑥 = 0
I. Fundamentos de la vibración

Vibración libre con amortiguamiento viscosoSOLUCIÓN
Suponiendo:
𝑥 𝑡 = 𝐶𝑒𝑠𝑡
Donde C y s son ctes. Indeterminadas, entonces laecuación de movimiento queda en ecuacióncaracterística:
𝑚𝑠2 + 𝑠𝑐 + 𝑘 = 0
Cuyas raíces son:
𝑠1,2 =−𝑐 ± 𝑐2 − 4𝑚𝑘
2𝑚= −
𝑐
2𝑚±
𝑐
2𝑚
2
−𝑘
𝑚
I. Fundamentos de la vibración
El amortiguamiento crítico 𝑐𝑐 se define como el valor de lacte. De amortiguamiento c con la cual el radical de laecuación de las raíces se vuelve cero:
𝑐𝑐2𝑚
2
−𝑘
𝑚= 0
𝑐𝑐 = 2𝑚𝑘
𝑚= 2𝑚𝜔𝑛
La relación de amortiguamiento ζ se define como larelación de la cte. De amortiguamiento a la cte. Deamortiguamiento crítico:
ζ = 𝑐 𝑐𝑐
CTE. DE AMORTIGUAMIENTO Y LARELACIÓN DE AMORTIGUAMIENTO

Vibración libre con amortiguamiento viscosoCASO 1: SIST. SUBAMORTIGUADO
(ζ<1 o c<𝒄𝒄 )
Raices: 𝑠1 = −ζ + 𝑖 1 − ζ2 𝜔𝑛
𝑠2 = −ζ − 𝑖 1 − ζ2 𝜔𝑛
Movimiento amortiguado de frecuencia angular
1 − ζ2𝜔𝑛, y el factor de la amplitud disminuye exponencialmente con el tiempo, frecuencia de vibración subamortiguada:
𝜔𝑑 = 1 − ζ2𝜔𝑛
I. Fundamentos de la vibración

Vibración libre con amortiguamiento viscosoCASO 2: SIST. CRÍTICAMENTE AMORTIGUADO
(ζ<1 o c<𝒄𝒄 )
Raices: 𝑠1 = 𝑠2 = −𝑐𝑐
2𝑚= −𝜔𝑛
Solución: 𝑥 𝑡 = 𝑥0 + 𝑥0 + 𝜔𝑛𝑥0 𝑡 𝑒−𝜔𝑛𝑡
El movimiento representado por la ecuaciónsolución es aperiódico. Como 𝑒−𝜔𝑛𝑡→0 a medidaque t→∞, el movimiento finalmente se reduce acero.
I. Fundamentos de la vibración
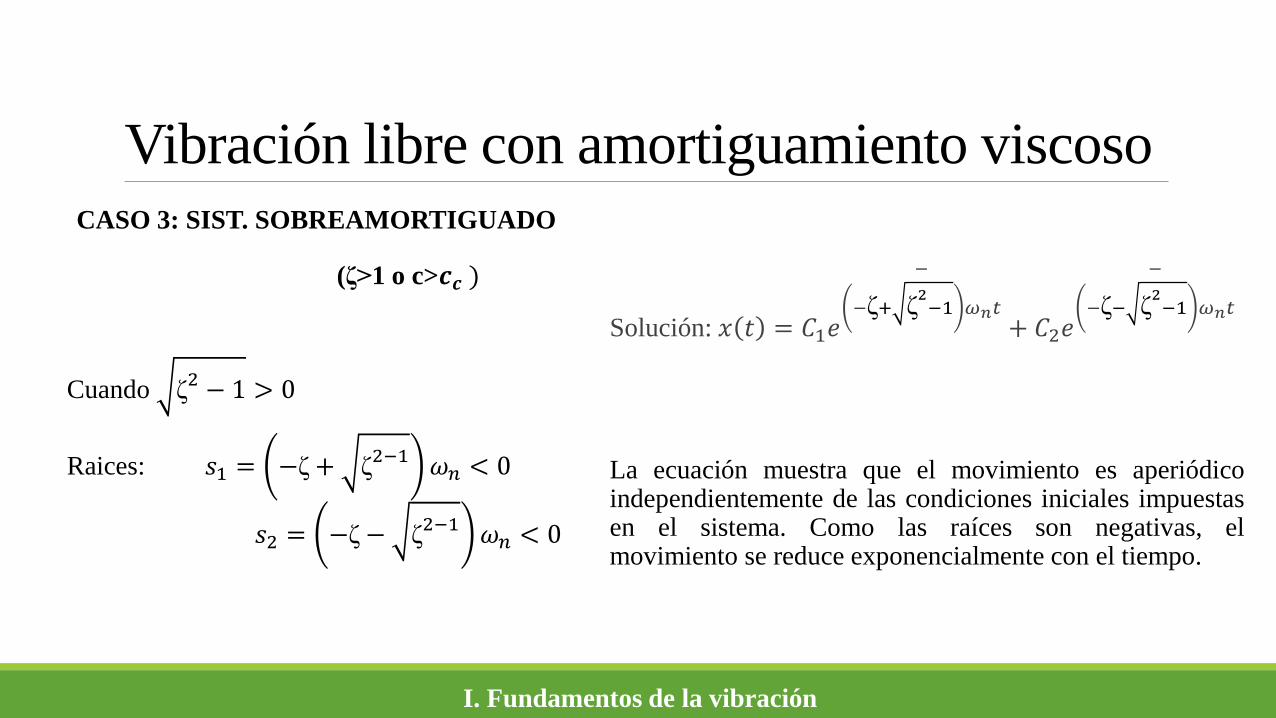
Vibración libre con amortiguamiento viscosoCASO 3: SIST. SOBREAMORTIGUADO
(ζ>1 o c>𝒄𝒄 )
Cuando ζ2 − 1 > 0
Raices: 𝑠1 = −ζ + ζ2−1 𝜔𝑛 < 0
𝑠2 = −ζ − ζ2−1 𝜔𝑛 < 0
I. Fundamentos de la vibración
Solución: 𝑥 𝑡 = 𝐶1𝑒
−
−ζ+ ζ2−1 𝜔𝑛𝑡
+ 𝐶2𝑒
−
−ζ− ζ2−1 𝜔𝑛𝑡
La ecuación muestra que el movimiento es aperiódicoindependientemente de las condiciones iniciales impuestasen el sistema. Como las raíces son negativas, elmovimiento se reduce exponencialmente con el tiempo.