Embed Size (px)
Citation preview
Variational integrators for electric and
nonsmooth systems
Sina Ober-Blobaum
Control GroupDepartment of Engineering Science
University of Oxford
Fellow of Harris Manchester College
Summerschool Applied Mathematics and Mechanics:Geometric Methods in Dynamics
5–9 September 2016
Sina Ober-Blobaum p.1

Overview
I Lecture 1: Variational integrators for electric circuits
Ober-Blobaum, Tao, Cheng, Owhadi, Marsden: Variational integratorsfor electric circuits. Journal of Computational Physics, 2013.
I Lecture 2: Variational integrators for nonsmooth systems
Fetecau, Marsden, Ortiz, West: Nonsmooth Variational Mechanics andVariational Collision Integrators. SIAM Applied Dynamical Systems, 2003.
I Lecture 3: Recent topics in Variational Integration
Higher order variational integrators, error analysis,relation to Runge-Kutta methods, ...
Sina Ober-Blobaum p.2

Overview
I Lecture 1: Variational integrators for electric circuits
Ober-Blobaum, Tao, Cheng, Owhadi, Marsden: Variational integratorsfor electric circuits. Journal of Computational Physics, 2013.
Sina Ober-Blobaum p.3

Variational (symplectic) integration
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
!
"
Sina Ober-Blobaum p.4

Variational (symplectic) integration
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
!
"
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
!
"
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
!
"
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
!
"
explicit Euler symplectic Euler implicit Euler
Sina Ober-Blobaum p.5

Variational (symplectic) integration
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
!
"
I preservation of symplecticity due to variational structure(generating function)
I momentum map preservation (e.g. linear and rotationalmomentum) due to discrete Noether theorem
I good long term energy behavior due to symplecticity andbackward error analysis
Sina Ober-Blobaum p.6
Motivation
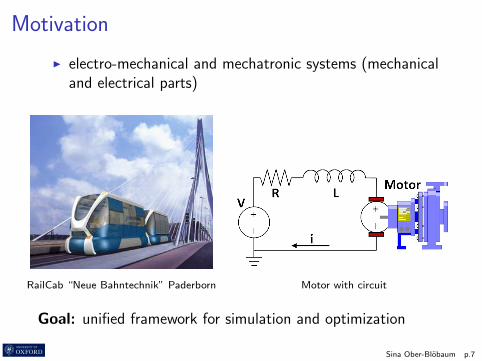
I electro-mechanical and mechatronic systems (mechanicaland electrical parts)
RailCab “Neue Bahntechnik” Paderborn Motor with circuit
Goal: unified framework for simulation and optimization
Sina Ober-Blobaum p.7

Motivation
Mechanical systems:
I variational integrators well established
I based on discrete variational principle in mechanics
Electrical systems:
+!
C1
C2L
R
UV
I variational principle required
I Lagrangian formulation withdegenerate symplectic form
I forces and constraints
I discrete variational scheme
Future goal: powerful unified variational scheme for thesimulation and optimization of electromechanical systems
Sina Ober-Blobaum p.8
Outline
I Basics on circuit modeling
I Geometric setting
I Variational formulation: forces, constraints, degeneracyand reduced formulations
I Construction of integrators: discrete variationalformulation
I Structure preserving properties
I Numerical examples and comparison to standardapproaches
I Nonlinear circuits
I Literature overview
Sina Ober-Blobaum p.9

Basic notations
+!
C1
C2L
R
UV
device linear nonlinear
resistor iR = GuR iR = g(uR , t)
capacitor iC = C ddt uC iC = d
dt qC (uC , t)
inductor uL = L ddt iL uL = d
dtϕL(iL, t)
device independent controlled
voltage source uV = v(t) uV = v(uctrl , ictrl , t)current source iI = i(t) iI = i(uctrl , ictrl , t)
characteristic equations for basic elements
Sina Ober-Blobaum p.10

Energies in electric circuits
I magnetic energy stored in inductor
Emag(iL) =
∫ iL
0
ϕL(y) dy
I electrical energy stored in capacitor
Eel(qC ) =
∫ qC
0
uC (y) dy
linear circuit: ϕL(iL) = LiL and uC (qC ) = C−1qC
Emag(iL) =1
2Li2L , Eel(qC ) =
1
2C−1q2
C
Sina Ober-Blobaum p.11
Graph representation
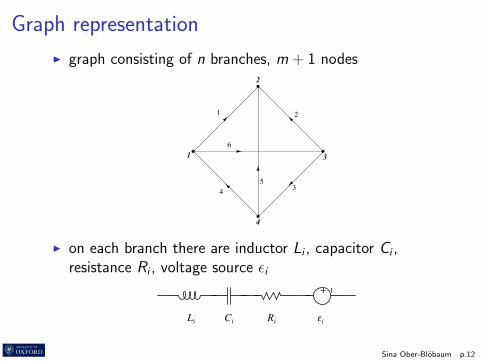
I graph consisting of n branches, m + 1 nodes
1 2
345
61
2
3
4
I on each branch there are inductor Li , capacitor Ci ,resistance Ri , voltage source εi
+ !
Li Ci Ri "i
Sina Ober-Blobaum p.12

Kirchhoff Laws
Kirchhoff Current Law (KCL)
The sum of currents leading to and leaving from any node isequal to zero.
∑i = 0
Kirchhoff Voltage Law (KVL)
The sum of voltages along each mesh of the network is equalto zero.
∑u = 0
Sina Ober-Blobaum p.13
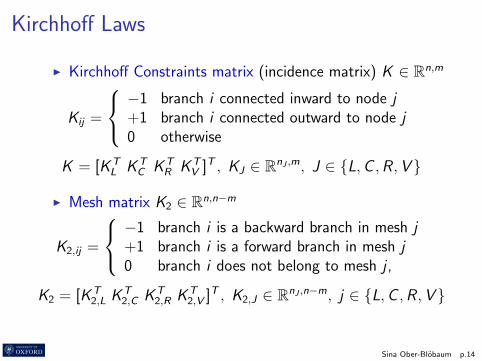
Kirchhoff Laws
I Kirchhoff Constraints matrix (incidence matrix) K ∈ Rn,m
Kij =
−1 branch i connected inward to node j+1 branch i connected outward to node j0 otherwise
K = [KTL KT
C KTR KT
V ]T , KJ ∈ RnJ ,m, J ∈ L,C ,R ,V
I Mesh matrix K2 ∈ Rn,n−m
K2,ij =
−1 branch i is a backward branch in mesh j+1 branch i is a forward branch in mesh j0 branch i does not belong to mesh j ,
K2 = [KT2,L K
T2,C KT
2,R KT2,V ]T , K2,J ∈ RnJ ,n−m, j ∈ L,C ,R ,V
Sina Ober-Blobaum p.14

Kirchhoff Laws
Kirchhoff Current Law (KCL)
The sum of currents leading to and leaving from any node isequal to zero.
∑i = 0 KT ·i(t) = 0
Kirchhoff Voltage Law (KVL)
The sum of voltages along each mesh of the network is equalto zero.
∑u = 0 KT
2 ·u(t) = 0
Tellegen’s theorem: im(K2) ⊥ im(K )
Sina Ober-Blobaum p.15

Geometric setting
configuration, tangent and cotangent space
I charge space Q, branch charge q ⊆ Rn
I current space TQ, branch currents (i =)v ∈ TqQ ⊆ Rn
I flux linkage space T ∗Q, flux linkages p ∈ T ∗qQ ⊆ Rn
constraint distribution and annihilator
Sina Ober-Blobaum p.16

Geometric setting
configuration, tangent and cotangent space
I charge space Q, branch charge q ⊆ Rn
I current space TQ, branch currents (i =)v ∈ TqQ ⊆ Rn
I flux linkage space T ∗Q, flux linkages p ∈ T ∗qQ ⊆ Rn
constraint distribution and annihilator
I constraint distribution
∆Q(q) = v ∈ TqQ | 〈w a, v〉 = 0, a = 1, . . . ,m ⊂ TqQ
I annihilator
∆0Q(q) = w ∈ T ∗qQ | 〈w , v〉 = 0 ∀v ∈ ∆Q(q) ⊂ T ∗qQ
Sina Ober-Blobaum p.17

Geometric setting
configuration, tangent and cotangent space
I charge space Q, branch charge q ⊆ Rn
I current space TQ, branch currents (i =)v ∈ TqQ ⊆ Rn
I flux linkage space T ∗Q, flux linkages p ∈ T ∗qQ ⊆ Rn
constraint distribution and annihilator
I constraint KCL space
∆Q(q) = v ∈ TqQ |KTv = 0 ⊂ TqQ
I constraint KVL space
∆0Q(q) = u ∈ T ∗qQ |KT
2 u = 0 ⊂ T ∗qQ
Sina Ober-Blobaum p.18
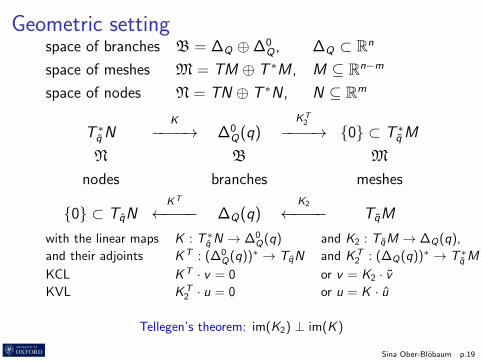
Geometric settingspace of branches B = ∆Q ⊕∆0
Q , ∆Q ⊂ Rn
space of meshes M = TM ⊕ T ∗M , M ⊆ Rn−m
space of nodes N = TN ⊕ T ∗N , N ⊆ Rm
T ∗qNK
−−−−→ ∆0Q(q)
KT2
−−−−→ 0 ⊂ T ∗qM
N B M
nodes branches meshes
0 ⊂ TqNKT
←−−−− ∆Q(q)K2
←−−−− TqM
with the linear maps K : T ∗qN → ∆0
Q(q) and K2 : TqM → ∆Q(q),
and their adjoints KT : (∆0Q(q))∗ → TqN and KT
2 : (∆Q(q))∗ → T ∗qM
KCL KT · v = 0 or v = K2 · vKVL KT
2 · u = 0 or u = K · u
Tellegen’s theorem: im(K2) ⊥ im(K )
Sina Ober-Blobaum p.19

Variational formulation
mechanical system electrical circuit (linear relations)
kinetic energy magnetic energy 12vTLv ∈ R
potential energy electrical energy 12qTCq ∈ R
friction dissipation R · v ∈ Rn
external force external sources E · u ∈ Rn
(non)holonomic constraints KCL KT · v = 0
withL = diag(L1, . . . , Ln), C = diag( 1
C1, . . . , 1
Cn),
R = diag(R1, . . . ,Rn), E = diag(ε1, . . . , εn)
Sina Ober-Blobaum p.20

Variational formulationI Lagrangian L(q, v) = 1
2vTLv − 1
2qTCq on TQ
I forces f = −R · v + E · u ∈ T ∗qQ
I distribution ∆Q(q) = v ∈ TqQ |KTv = 0 = null(KT )
1. dissipative and external forces (d’Alembert)
2. KCL constraints (constrained variations)
3. degenerate Lagrangian
I Legendre transformation FL(q, v) = (q, ∂L/∂v)
if∂2L∂v 2
= L is not invertible ⇒ degenerate system
I constraint flux linkage subspace
P = FL(∆Q) ⊂ T ∗Q,
Sina Ober-Blobaum p.21

Constrained variational formulationI Constrained Lagrange-d’Alembert-Pontryagin Principle on
TQ⊕
T ∗Q gives implicit Euler-Lagrange equations
[Yoshimura, Marsden 2006]
δ
∫ T
0
(L(q, v) + 〈p, q − v〉) dt +
∫ T
0
f ·δqdt = 0, δq ∈ ∆Q(q)
Sina Ober-Blobaum p.22

Constrained variational formulationI Constrained Lagrange-d’Alembert-Pontryagin Principle on
TQ⊕
T ∗Q gives implicit Euler-Lagrange equations
[Yoshimura, Marsden 2006]
δ
∫ T
0
(L(q, v) + 〈p, q − v〉) dt +
∫ T
0
f ·δqdt = 0, δq ∈ ∆Q(q)
see blackboard
Sina Ober-Blobaum p.23

Constrained variational formulationI Constrained Lagrange-d’Alembert-Pontryagin Principle on
TQ⊕
T ∗Q gives implicit Euler-Lagrange equations
[Yoshimura, Marsden 2006]
δ
∫ T
0
(L(q, v) + 〈p, q − v〉) dt +
∫ T
0
f ·δqdt = 0, δq ∈ ∆Q(q)
⇒
q = v charge-current relation
p = ∂L∂q
+ f + K · u KVL form u = K · u0 = ∂L
∂v− p flux relation (“primary constraints”)
0 = KT · v KCL
n + n + n + m equations
I differential-algebraic system
I differential variables q and p, algebraic variables v and u
I non-autonomous system due to external force f (t)
I no ode description for singular Lagrangian
Sina Ober-Blobaum p.24

Reduction
1. less redundant formulation
2. degeneracy of Lagrangian is cancelled for specific systems
3. physical meaning of reduced space: mesh space M withcoordinates (q, v , p), q, v , p ∈ Rn−m
T ∗qNK
−−−−→ ∆0Q(q)
KT2
−−−−→ 0 ⊂ T ∗qM
N B M
nodes branches meshes
0 ⊂ TqNKT
←−−−− ∆Q(q)K2
←−−−− TqM
Sina Ober-Blobaum p.25

Reduction
1. less redundant formulation
2. degeneracy of Lagrangian is cancelled for specific systems
3. physical meaning of reduced space: mesh space M withcoordinates (q, v , p), q, v , p ∈ Rn−m
T ∗qNK
−−−−→ ∆0Q(q)
KT2
−−−−→ 0 ⊂ T ∗qM
N B M
nodes branches meshes
0 ⊂ TqNKT
←−−−− ∆Q(q)K2
←−−−− TqM
Sina Ober-Blobaum p.26
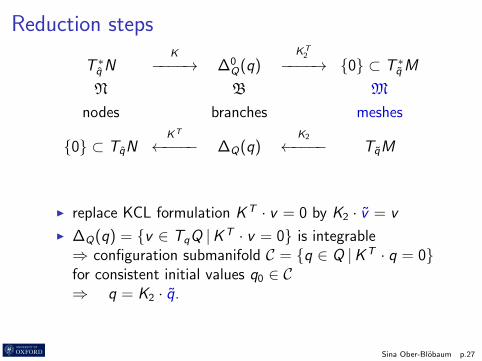
Reduction steps
T ∗qNK
−−−−→ ∆0Q(q)
KT2
−−−−→ 0 ⊂ T ∗qM
N B M
nodes branches meshes
0 ⊂ TqNKT
←−−−− ∆Q(q)K2
←−−−− TqM
I replace KCL formulation KT · v = 0 by K2 · v = v
I ∆Q(q) = v ∈ TqQ |KT · v = 0 is integrable⇒ configuration submanifold C = q ∈ Q |KT · q = 0for consistent initial values q0 ∈ C⇒ q = K2 · q.
Sina Ober-Blobaum p.27

Reduction steps
T ∗qNK
−−−−→ ∆0Q(q)
KT2
−−−−→ 0 ⊂ T ∗qM
N B M
nodes branches meshes
0 ⊂ TqNKT
←−−−− ∆Q(q)K2
←−−−− TqM
I constrained Lagrangian LM := K ∗2L : TM → R
LM(q, v) = L(K2q,K2v) =1
2vTKT
2 LK2v −1
2qTKT
2 CK2q
I reduced Legendre transformation FLM : TM → T ∗M
FLM(q, v) = (q, ∂LM/∂v) = (q,KT2 LK2v).
I reduced force f M(q, v , t) = KT2 f (K2q,K2v , t) in T ∗M
I reduced flux p = KT2 p in T ∗M
Sina Ober-Blobaum p.28

Reduced constrained variational formulationI reduced L-d’A-Pontryagin Principle on TM
⊕T ∗M
δ
∫ T
0
(LM(q, v) + 〈p, ˙q − v〉
)dt +
∫ T
0
f M · δqdt = 0
I implicit Euler-Lagrange equations on mesh space M
⇒
˙q = v
˙p =∂LM
∂q+ f KVL form KT
2 · u = 0
0 =∂LM
∂v− p with
∂LM
∂v= KT
2 LK2 · v
3 · (n −m) equationsI differential variables q and p, algebraic variable v
Is∂2LM
∂v 2= KT
2 LK2 invertible?
Sina Ober-Blobaum p.29

Cancellation of degeneracy by constraints
Cancellation of degeneracy
For linear LRCV circuits the system is non-degenerate, if thenumber of capacitors nC , resistors nR and voltage sources nVequals the number of independent constraints lX involving thecurrents through the capacitor, resistor and source branches,i.e., if
nC + nR + nV = lX
I Proof uses basic linear algebra arguments showing
1. null([KTC KT
R KTV ]) = 0
2. ⇒ null(KT2 LK2) = 0
Sina Ober-Blobaum p.30

Examples
L1
L2C1
C2
1
2
3 1
2
L1
C1 C2 C3
KTL =
(1 00 −1
), KT
C =
(0 −1−1 1
)KTL =
(10
), KT
C =
(−1 0 01 −1 −1
)null(KT
C ) = 0 null(KTC ) 6= 0
⇓ ⇓non-degenerate constrained Lagrangian degenerate constrained Lagrangian
I interpretation: Each fundamental loop has to contain atleast one inductor
Sina Ober-Blobaum p.31
Next steps
Alternative 1: Construction of non-degenerateLagrangian on submanifold
I projection onto image of Legendre transformation
I identification of more constraints ((non)holonomic)
I e.g. Gotay-Nester: C → C2 → · · · → Ck ⊂ TQ
– loss of physical meaning for reduced variables, difficult toidentify additional contraints
Alternative 2: Keep degeneracy
I derive integrator for degenerate Lagrangian (DAEintegrator)
I derive discrete version of implicit EL equations
I check for applicability
Sina Ober-Blobaum p.32
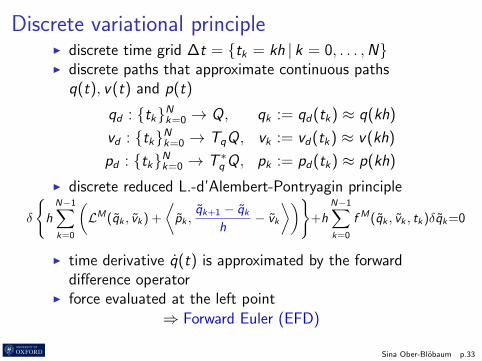
Discrete variational principleI discrete time grid ∆t = tk = kh | k = 0, . . . ,NI discrete paths that approximate continuous paths
q(t), v(t) and p(t)
qd : tkNk=0 → Q, qk := qd(tk) ≈ q(kh)
vd : tkNk=0 → TqQ, vk := vd(tk) ≈ v(kh)
pd : tkNk=0 → T ∗qQ, pk := pd(tk) ≈ p(kh)
I discrete reduced L.-d’Alembert-Pontryagin principle
δ
h
N−1∑k=0
(LM(qk , vk) +
⟨pk ,
qk+1 − qkh
− vk
⟩)+h
N−1∑k=0
f M(qk , vk , tk)δqk=0
I time derivative q(t) is approximated by the forwarddifference operator
I force evaluated at the left point⇒ Forward Euler (EFD)
Sina Ober-Blobaum p.33

Discrete variational principleI discrete time grid ∆t = tk = kh | k = 0, . . . ,NI discrete paths that approximate continuous paths
q(t), v(t) and p(t)
qd : tkNk=0 → Q, qk := qd(tk) ≈ q(kh)
vd : tkNk=0 → TqQ, vk := vd(tk) ≈ v(kh)
pd : tkNk=0 → T ∗qQ, pk := pd(tk) ≈ p(kh)
I discrete reduced L.-d’Alembert-Pontryagin principle
δ
h
N∑k=1
(LM(qk , vk) +
⟨pk ,
qk − qk−1
h− vk
⟩)+h
N∑k=1
f M(qk , vk , tk)δqk=0
I time derivative q(t) is approximated by the backwarddifference operator
I force evaluated at the right point
⇒ Backward Euler (EBD)
Sina Ober-Blobaum p.34

Discrete variation
I discrete variations δqk with δq0 = δqN = 0
I discrete variations δvk and δpk
⟨∂LM
∂v(q0, v0)− p0, δv0
⟩+
N−1∑k=1
[⟨∂LM
∂v(qk , vk)− pk , δvk
⟩+
⟨∂LM
∂q(qk , vk)− 1
h(pk − pk−1) + f M(qk , vk , tk), δqk
⟩⟨δpk−1,
qk − qk−1
h− vk−1
⟩]+
⟨δpN−1
qN − qN−1
h− vN−1
⟩= 0
Sina Ober-Blobaum p.35

Discrete reduced Euler-Lagrange equations
∂LM
∂v(q0, v0) = p0,
qN − qN−1
h= vN−1
∂LM
∂q(qk , vk)− 1
h(pk − pk−1) + f M(qk , vk , tk) = 0
qk − qk−1
h= vk−1
Forward Euler∂LM
∂v(qk , vk) = pk
k = 1, . . . ,N − 1
q1 − q0h
= v1,∂LM
∂v(q1, v1) = p1
∂LM
∂q(qk−1, vk−1)− 1
h(pk − pk−1) + f M(qk−1, vk−1, tk−1) = 0
qk − qk−1
h= vk
Backward Euler∂LM
∂v(qk , vk) = pk
k = 2, . . . ,N
Sina Ober-Blobaum p.36

Applicability
I apply e.g. Newton’s scheme to determinexk+1 = (qk+1, vk+1, pk+1) by solving 0 = F (xk , xk+1) forgiven xk = (qk , vk , pk)
I unique solutions for regular Jacobian of F w.r.t. xk+1
I applicability dependent on update rule
Example: EBD for linear circuit leads to the iteration scheme
I −hI 0
0 KT2 LK2 −I
0 0 I
︸ ︷︷ ︸
=A
qkvkpk
=
I 0 0
0 0 0
−hKT2 CK2 −hKT
2 diag(R)K2 I
qk−1
vk−1
pk−1
+
0
0
hKT2
us(tk−1)
A is invertible iff KT2 LK2 is regular
Sina Ober-Blobaum p.37

Applicability
I apply e.g. Newton’s scheme to determinexk+1 = (qk+1, vk+1, pk+1) by solving 0 = F (xk , xk+1) forgiven xk = (qk , vk , pk)
I unique solutions for regular Jacobian of F w.r.t. xk+1
I applicability dependent on update rule
Example: EFD for linear circuit leads to the iteration scheme
I 0 0
0 KT2 LK2 −I
hKT2 CK2 hKT
2 diag(R)K2 I
︸ ︷︷ ︸
=A
qkvkpk
=
I hI 0
0 0 0
0 0 I
qk−1
vk−1
pk−1
+
0
0
hKT2
us(tk )
A is invertible iff KT2 (L+hR)K2 is regular
Sina Ober-Blobaum p.38
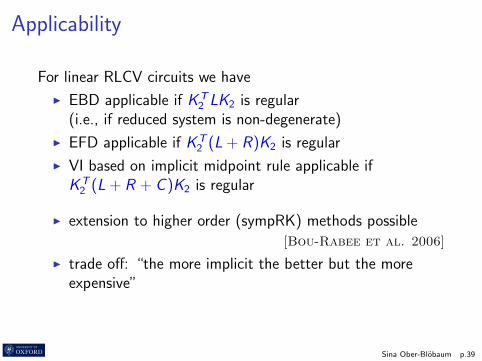
Applicability
For linear RLCV circuits we have
I EBD applicable if KT2 LK2 is regular
(i.e., if reduced system is non-degenerate)
I EFD applicable if KT2 (L + R)K2 is regular
I VI based on implicit midpoint rule applicable ifKT
2 (L + R + C )K2 is regular
I extension to higher order (sympRK) methods possible[Bou-Rabee et al. 2006]
I trade off: “the more implicit the better but the moreexpensive”
Sina Ober-Blobaum p.39

Structure preservation – symplecticity
I symlecticity: conservation of symplectic formΩ = dqi ∧ dpi
(F t)∗Ω = Ω ∀tI conformal symlecticity (in presence of uniform dissipative
forces fL = c · p, c ∈ R):
(F t)∗Ω = exp (ct)Ω ∀t
I variational integrator preserves the symplectic form, orthe rate of decay of the symplectic form, respectively
I leads to good long-term energy behavior of variationalintegrators
e.g. Hairer, Lubich 2004
Sina Ober-Blobaum p.40
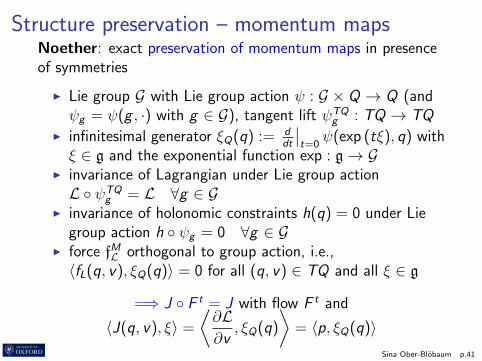
Structure preservation – momentum mapsNoether: exact preservation of momentum maps in presenceof symmetries
I Lie group G with Lie group action ψ : G × Q → Q (andψg = ψ(g , ·) with g ∈ G), tangent lift ψTQ
g : TQ → TQI infinitesimal generator ξQ(q) := d
dt
∣∣t=0
ψ(exp (tξ), q) withξ ∈ g and the exponential function exp : g→ G
I invariance of Lagrangian under Lie group actionL ψTQ
g = L ∀g ∈ GI invariance of holonomic constraints h(q) = 0 under Lie
group action h ψg = 0 ∀g ∈ GI force fML orthogonal to group action, i.e.,〈fL(q, v), ξQ(q)〉 = 0 for all (q, v) ∈ TQ and all ξ ∈ g
=⇒ J F t = J with flow F t and
〈J(q, v), ξ〉 =
⟨∂L∂v
, ξQ(q)
⟩= 〈p, ξQ(q)〉
Sina Ober-Blobaum p.41

Structure preservation – momentum maps
I Examples from mechanics
G = R temporal ⇒ energy
G = R3 translational ⇒ linear momentum
G = SO(3) rotational ⇒ angular momentum
I variational integrator preserves the invariance property ifthe discrete Lagrangian has the same symmetry
What are momentum maps for electric circuits?Which symmetries can we expect?
Sina Ober-Blobaum p.42

Momentum maps for electric circuitsI Lagrangian L(q, v) = 1
2vTLv − 1
2qTCq
I force f = −Rv + Eu, KCL KTv = 0
Invariance of Lagrangian
The Lagrangian of the unreduced system is invariant under thetranslation of qL.
Proof:Let G = RnL , ΦTQ(g , (q, v)) = (qL + g , qC , qR , qV , vL, vC , vR , vV )
LΦTQg (q, v) =
1
2
vLvCvRvV
T
L
vLvCvRvV
− 1
2
qL + gqCqRqV
T
C
qL + gqCqRqV
= 1
2vTLv − 1
2qTCq = L(q, v) since C = diag
(1C1, . . . , 1
Cn
)with the first nL diagonal elements being zero.
Sina Ober-Blobaum p.43

Momentum maps for electric circuitsI Lagrangian L(q, v) = 1
2vTLv − 1
2qTCq
I force f = −Rv + Eu, KCL KTv = 0
Orthogonality of external force
The external force f is orthogonal to the action of the groupG = RnL being translations of qL.
Proof: Let ξ ∈ g = RnL . For Φg (q) = (qL + g , qC , qR , qV ) we compute
ξQ(q) =d
dt
∣∣∣∣t=0
Φexp tξ(q) =d
dt
∣∣∣∣t=0
(qL+exp tξ, qC , qR , qV ) = (ξ, 0, 0, 0).
Thus, we have
〈fL, ξQ(q)〉 = 〈−Rv + Eu, ξQ(q)〉 = 0
since R and E have zero entries in the first nL lines and columns.
Sina Ober-Blobaum p.44
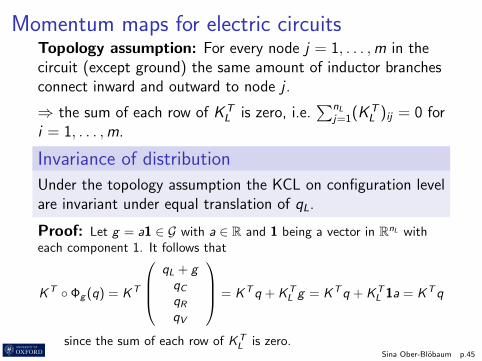
Momentum maps for electric circuitsTopology assumption: For every node j = 1, . . . ,m in thecircuit (except ground) the same amount of inductor branchesconnect inward and outward to node j .
⇒ the sum of each row of KTL is zero, i.e.
∑nLj=1(KT
L )ij = 0 fori = 1, . . . ,m.
Invariance of distribution
Under the topology assumption the KCL on configuration levelare invariant under equal translation of qL.
Proof: Let g = a1 ∈ G with a ∈ R and 1 being a vector in RnL witheach component 1. It follows that
KT Φg (q) = KT
qL + gqCqRqV
= KTq + KTL g = KTq + KT
L 1a = KTq
since the sum of each row of KTL is zero.
Sina Ober-Blobaum p.45
Momentum maps for electric circuits
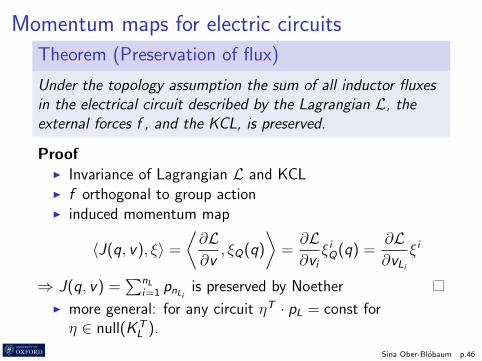
Theorem (Preservation of flux)
Under the topology assumption the sum of all inductor fluxesin the electrical circuit described by the Lagrangian L, theexternal forces f , and the KCL, is preserved.
ProofI Invariance of Lagrangian L and KCLI f orthogonal to group actionI induced momentum map
〈J(q, v), ξ〉 =
⟨∂L∂v
, ξQ(q)
⟩=∂L∂vi
ξiQ(q) =∂L∂vLi
ξi
⇒ J(q, v) =∑nL
i=1 pnLi is preserved by Noether
I more general: for any circuit ηT · pL = const forη ∈ null(KT
L ).
Sina Ober-Blobaum p.46

Example: LC transmission line
1 2L1 L2 L3
C1 C2
0 10 20 30 40 50 60 70 80 90−1
−0.5
0
0.5
1
1.5
2
time
flux
pL1
pL2pL3
pL1+pL2+pL3
K =
−1 01 −10 11 00 1
KL =
−1 01 −10 1
KC =
(1 00 1
)nL∑j=1
(KTL )ij = 0, i = 1, 2
⇒ pL1 + pL2 + pL3 = constSina Ober-Blobaum p.47

Structure preservation – what else?
Preservation of frequency spectrum
I consider the example of the 1D harmonic oscillator
I define one-step update scheme as
(qk+1, pk+1)T = A · (qk , pk)T = QVQ−1 · (qk , pk)T
with A having linearly independent eigenvectors λ1, λ2and being diagonalizable with V = diag(λ1, λ2)
I with the coordinate transformation(xk , yk)T = Q−1 · (qk , pk)T we obtain
(xk+1, yk+1)T = V · (xk , yk)T
i.e., xk+1 = λ1xk and yk+1 = λ2yk
Sina Ober-Blobaum p.48

Structure preservation – frequency spectrumWe show
1. A has two eigenvalues of norm 1 iff scheme is symplectic
2. methods defined by matrices with norm 1 eigenvaluespreserve frequeny spectrum defined on different timespans
Proof of 2.
I discrete inverse Fourier transformationxk = 1
N
∑Nn=1 xn exp
(2πiN kn
), k = 1, . . . ,N
I Consider a sequence of discrete points XkNk=1 that is shifted byone time step such that Xk = xk+1 = λ1xk , k = 1, . . . ,N
I discrete inverse Fourier transformationXk = 1
N
∑Nn=1 λ1xn exp
(2πiN kn
), k = 1, . . . ,N, i.e., Xn = λ1xn
I by definition of the frequency spectrum, we haveX ∗n Xn = x∗nλ
∗1λ1xn = x∗n |λ1|2xn = x∗n xn
⇒ “preservation of the frequency spectrum”
Sina Ober-Blobaum p.49

Standard methods in circuit theory
I Circuit simulator SPICE (Simulation Program withIntegrated Circuit Emphasis)
Electronics Research Laboratory of the University
of California, Berkeley
I Modeling: Modified Node Analysis (MNA)
I Simulation: Backward Differentiation Formulas (BDF)methods
Sina Ober-Blobaum p.50

Modified Nodal Analysis (MNA) (charge-flux)
1. Apply KCL to every node except ground
2. Insert representation for the branch current of resistors,capacitors and current sources
3. Add representation for inductors and voltage sourcesexplicitely to the system
(KCL) KTC qC (KC u, t) + KT
R g(KR u, t) + KTL vL + KT
V vV
+KTI vI (Ku, qC (KC u, t), vL, vV , t) = 0
(inductors) pL(vL, t)− KLu = 0
(voltage sources) uV (Ku, qC (KCu, t), vL, vV , t)− KV u = 0
I inductor current vL, capacitor charge qC , inductor flux pLI node voltage u, voltage source current vV , conductance g
I controlled current and voltage source vI and uV
Sina Ober-Blobaum p.51

Numerical integration schemesI DAE system A[d(x(t), t)]′ + b(x(t), t) = 0 with
x = [u, vL, vv ]T and d(x , t) = [qC (KC u, t), pL(vL, t)]T
I conventional approach: Implicit linear multi-step formulas
k∑i=0
αid(xn+1−i , tn+1−i) = hk∑
i=0
βid′n+1−i
I BDF method: β1 = · · · = βk = 0, α0 = 1k β0 α1 α2 scheme1 1 −1 d(xn+1)− d(xn) = hd ′n+1 (implicit Euler)
2 23−4
313
d(xn+1)− 43d(xn) + 1
3d(xn−1) = h 2
3d ′n+1⊕
low computational cost (1 function evaluation per step)compared to RK methods
BUT non-symplectic (Tang 1993)
Sina Ober-Blobaum p.52

Example computations
Comparison of different solutions
I exact solution (exact)
I variational integrator of second order (VI)
I variational integrator of first order (EBD)
I variational integrator of first order (EFD)
I Runge Kutta of order 4 (RK)
I BDF method of order 2 applied to MNA system (MNABDF)
(fixed time-stepping for all methods)
Sina Ober-Blobaum p.53
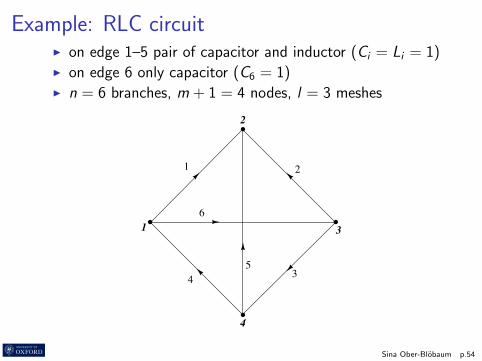
Example: RLC circuitI on edge 1–5 pair of capacitor and inductor (Ci = Li = 1)I on edge 6 only capacitor (C6 = 1)I n = 6 branches, m + 1 = 4 nodes, l = 3 meshes
1 2
345
61
2
3
4
Sina Ober-Blobaum p.54

LC circuit (no resistors) with step size h = 0.1
0 5 10 15 20 25
−1
−0.5
0
0.5
1
time
curre
nt o
n br
anch
1
0 5 10 15 20 25
−1
−0.5
0
0.5
1
time
curre
nt o
n br
anch
2
current branch 1 current branch 2
0 5 10 15 20 25
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
time
curre
nt o
n br
anch
3
0 5 10 15 20 25
1.42
1.44
1.46
1.48
1.5
1.52
1.54
1.56
1.58
1.6
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
current branch 3 energy behavior
Sina Ober-Blobaum p.55

LC circuit (no resistors) with step size h = 0.4
180 182 184 186 188 190 192 194 196 198 200−1.5
−1
−0.5
0
0.5
1
1.5
time
curre
nt o
n br
anch
1
exactVIVI EBDVI EFDRK4MNA BDF
180 182 184 186 188 190 192 194 196 198 200−1.5
−1
−0.5
0
0.5
1
1.5
time
curre
nt o
n br
anch
2
exactVIVI EBDVI EFDRK4MNA BDF
current branch 1 current branch 2
180 182 184 186 188 190 192 194 196 198 200−1.5
−1
−0.5
0
0.5
1
1.5
time
curre
nt o
n br
anch
3
exactVIVI EBDVI EFDRK4MNA BDF
0 100 200 300 400 500 600 700
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
current branch 3 energy behavior
Sina Ober-Blobaum p.56
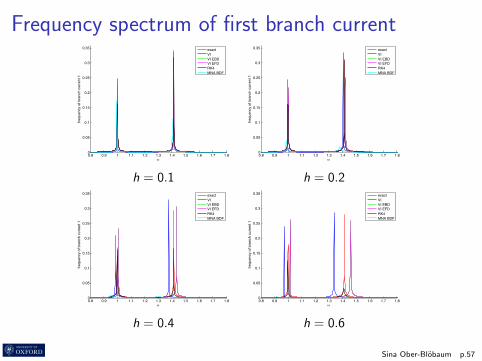
Frequency spectrum of first branch current
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
!
frequ
ency
of b
ranc
h cu
rrent
1
exactVIVI EBDVI EFDRK4MNA BDF
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
!
frequ
ency
of b
ranc
h cu
rrent
1
exactVIVI EBDVI EFDRK4MNA BDF
h = 0.1 h = 0.2
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
!
frequ
ency
of b
ranc
h cu
rrent
1
exactVIVI EBDVI EFDRK4MNA BDF
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
!
frequ
ency
of b
ranc
h cu
rrent
1
exactVIVI EBDVI EFDRK4MNA BDF
h = 0.4 h = 0.6
Sina Ober-Blobaum p.57

Current of first branch of LC circuit (no resistors)
0 500 1000 1500 2000 2500 3000
−1
−0.5
0
0.5
1
time
curre
nt o
n br
anch
1
exactVIRK4MNA BDF
0 500 1000 1500 2000 2500 3000
−1
−0.5
0
0.5
1
time
curre
nt o
n br
anch
1
exactVIRK4MNA BDF
h = 0.1 h = 0.2
0 500 1000 1500 2000 2500 3000
−1
−0.5
0
0.5
1
time
curre
nt o
n br
anch
1
exactVIRK4MNA BDF
0 500 1000 1500 2000 2500 3000
−1
−0.5
0
0.5
1
time
curre
nt o
n br
anch
1
exactVIRK4MNA BDF
h = 0.4 h = 0.6
Sina Ober-Blobaum p.58
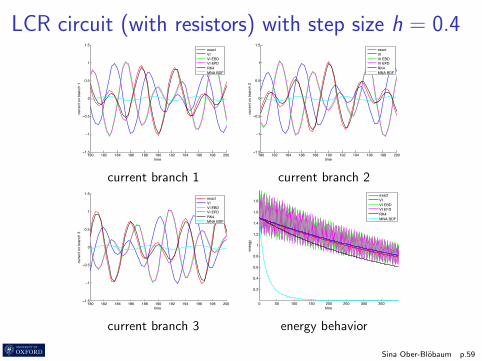
LCR circuit (with resistors) with step size h = 0.4
180 182 184 186 188 190 192 194 196 198 200−1.5
−1
−0.5
0
0.5
1
1.5
time
curre
nt o
n br
anch
1
exactVIVI EBDVI EFDRK4MNA BDF
180 182 184 186 188 190 192 194 196 198 200−1.5
−1
−0.5
0
0.5
1
1.5
time
curre
nt o
n br
anch
2
exactVIVI EBDVI EFDRK4MNA BDF
current branch 1 current branch 2
180 182 184 186 188 190 192 194 196 198 200−1.5
−1
−0.5
0
0.5
1
1.5
time
curre
nt o
n br
anch
3
exactVIVI EBDVI EFDRK4MNA BDF
0 50 100 150 200 250 300 350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
current branch 3 energy behavior
Sina Ober-Blobaum p.59
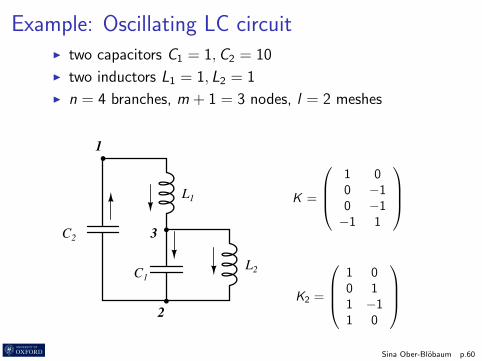
Example: Oscillating LC circuitI two capacitors C1 = 1,C2 = 10
I two inductors L1 = 1, L2 = 1
I n = 4 branches, m + 1 = 3 nodes, l = 2 meshes
L1
L2C1
C2
1
2
3
K =
1 00 −10 −1−1 1
K2 =
1 00 11 −11 0
Sina Ober-Blobaum p.60
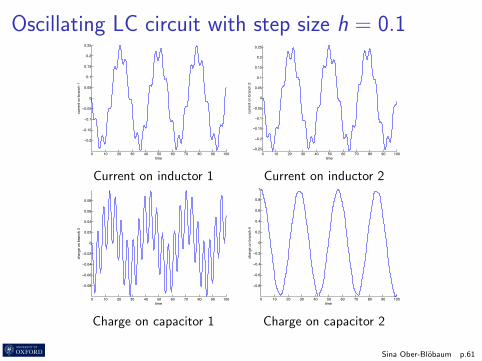
Oscillating LC circuit with step size h = 0.1
0 10 20 30 40 50 60 70 80 90 100
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
time
curre
nt o
n br
anch
1
0 10 20 30 40 50 60 70 80 90 100−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
time
curre
nt o
n br
anch
2
Current on inductor 1 Current on inductor 2
0 10 20 30 40 50 60 70 80 90 100
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
time
char
ge o
n br
anch
3
0 10 20 30 40 50 60 70 80 90 100
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
time
char
ge o
n br
anch
4
Charge on capacitor 1 Charge on capacitor 2
Sina Ober-Blobaum p.61

Energy of oscillating LC circuit
0 500 1000 1500 2000 2500 30000.0486
0.0488
0.049
0.0492
0.0494
0.0496
0.0498
0.05
0.0502
0.0504
0.0506
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
0 500 1000 1500 2000 2500 3000
0.0475
0.048
0.0485
0.049
0.0495
0.05
0.0505
0.051
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
h = 0.1 h = 0.2
0 500 1000 1500 2000 2500 3000
0.04
0.042
0.044
0.046
0.048
0.05
0.052
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
0 500 1000 1500 2000 2500 3000
0.025
0.03
0.035
0.04
0.045
0.05
time
ener
gy
exactVIVI EBDVI EFDRK4MNA BDF
h = 0.4 h = 0.6
Sina Ober-Blobaum p.62

Charge on capacitor 1 of LC circuit (h = 0.6)
0 500 1000 1500 2000 2500 3000−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
time
char
ge o
n br
anch
3
exactVIVI EBDVI EFDRK4MNA BDF
0 5 10 15 20 25 30 35 40 45 50−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
time
char
ge o
n br
anch
3
exactVIVI EBDVI EFDRK4MNA BDF
t ∈ [0, 3000] t ∈ [0, 50]
300 305 310 315 320 325 330 335 340 345 350−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
time
char
ge o
n br
anch
3
exactVIVI EBDVI EFDRK4MNA BDF
2500 2505 2510 2515 2520 2525 2530 2535 2540 2545 2550−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
time
char
ge o
n br
anch
3
exactVIVI EBDVI EFDRK4MNA BDF
t ∈ [300, 350] t ∈ [2500, 2550]
Sina Ober-Blobaum p.63

Frequency spectrum of charge on capacitor 1
1.3 1.35 1.4 1.45 1.5 1.550
0.005
0.01
0.015
0.02
0.025
0.03
!
frequ
ency
of b
ranc
h ch
arge
3
exactVIVI EBDVI EFDRK4MNA BDF
1.3 1.35 1.4 1.45 1.5 1.550
0.005
0.01
0.015
0.02
0.025
0.03
!
frequ
ency
of b
ranc
h ch
arge
3
exactVIVI EBDVI EFDRK4MNA BDF
h = 0.1 h = 0.2
1.3 1.35 1.4 1.45 1.5 1.550
0.005
0.01
0.015
0.02
0.025
0.03
!
frequ
ency
of b
ranc
h ch
arge
3
exactVIVI EBDVI EFDRK4MNA BDF
1.3 1.35 1.4 1.45 1.5 1.550
0.005
0.01
0.015
0.02
0.025
0.03
!
frequ
ency
of b
ranc
h ch
arge
3
exactVIVI EBDVI EFDRK4MNA BDF
h = 0.4 h = 0.6
Sina Ober-Blobaum p.64
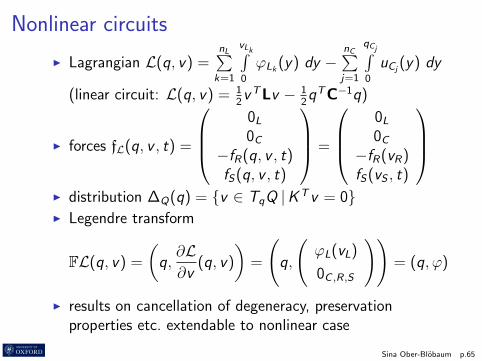
Nonlinear circuits
I Lagrangian L(q, v) =nL∑k=1
vLk∫0
ϕLk (y) dy −nC∑j=1
qCj∫0
uCj(y) dy
(linear circuit: L(q, v) = 12vTLv − 1
2qTC−1q)
I forces fL(q, v , t) =
0L
0C
−fR(q, v , t)fS(q, v , t)
=
0L
0C
−fR(vR)fS(vS , t)
I distribution ∆Q(q) = v ∈ TqQ |KTv = 0I Legendre transform
FL(q, v) =
(q,∂L∂v
(q, v)
)=
(q,
(ϕL(vL)
0C ,R,S
))= (q, ϕ)
I results on cancellation of degeneracy, preservationproperties etc. extendable to nonlinear case
Sina Ober-Blobaum p.65

Nonlinear LCR circuitLagrangian:
L(qC , vL) =c
2v2L1
+d
2log((tan(vL2/d))2+1)
−sgn(qC1)a
3q3C1− 1
2bq2C2
force: fR(vR) = ev3R
(a = 0.002, b =1
30, c = 30, d = 1, e = 5000)
0 100 200 300 400 500 600 700 8000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
time
energ
y
VI EFD
VI EBD
VI MPR
RK4
ODE45
exact
0 100 200 300 400 500 600 700 8000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
time
energ
y
VI EFD
VI EBD
VI MPR
RK4
ODE45
energy, no resistor (h = 0.08) energy with resistor (h = 0.08)
Sina Ober-Blobaum p.66

Conclusions
I variational approach for circuit modeling (degenerateLagrangian, dissipative and external forces, KCLconstraints)
I reduced variational approach on mesh space (cancelsdegeneracy for some cases, reduced system)
I discrete variational approach provides structure-preservingintegrator
I preservation of momentum mapsI preservation of frequency spectrumI good energy behavior
I variational integrators are convenient tools for thesimulation of electric and electromechanical systems
Sina Ober-Blobaum p.67
Literature overviewVariational inegrators for electric circuits
I Ober-Blobaum, Tao, Cheng, Owhadi, Marsden (2013):linear circuits
I Ober-Blobaum, Lindhorst (2014): nonlinear circuits
Lagrangian / Hamiltonian modeling of circuits
I MacFarlane (1967): tree structures (capacitor charges orinductor fluxes as generalized coordinates)
I Chua, McPherson (1973): mixed set of coordinates
I Maisser et al. (1995): Lagrangian modeling ofelectromechanical systems
Degenerate Lagrangian / Hamiltonian
I Dirac, Bergmann (1956): construction of submanifolds
I Gotay, Nester (1979): Lagrangian viewpoint
I van der Schaft (1995): implicit Hamiltonian systems
I Yoshimura, Marsden (2006): implicit Lagrangian systems
Sina Ober-Blobaum p.68




![Nonsmooth Lagrangian Mechanics and Variational …lagrange.mechse.illinois.edu/.../FeMaOrWe2003.pdfThe theory of geometric integration (see, for example, Sanz-Serna and Calvo [1994]](https://img.dokumen.tips/doc/110x75/5f3f7f4e24c7d06e2318e5e2/nonsmooth-lagrangian-mechanics-and-variational-the-theory-of-geometric-integration.jpg)













![Asynchronous Variational Integrators · variational time-stepping algorithms for mechanical systems. We refer toMars-den&West[2001] for an overview of the method for ODE (ordinary](https://img.dokumen.tips/doc/110x75/5f3f63b890ab0019626168a2/asynchronous-variational-integrators-variational-time-stepping-algorithms-for-mechanical.jpg)










