Embed Size (px)
Citation preview

Using three IR sensors, SensingBot can sense the front obstacles so it can avoid them.
SensingSensing

1. Only using bolst, fix the DC motor and the motor frame.
AssemblingAssembling

2. Put the motor frame fixed with the DC motor on the main frame and tighten it only using bolts.
AssemblingAssembling

3. Tighten supports on the main frame using bolts. (supports that is located on C4 and G4 are supposed to be fixed on the bolts that are tightened to the motor frame.)
AssemblingAssembling

4. Insert the wheel into the DC motor. Insert he bolt into the main frame then fix it using nut and cap nut.
AssemblingAssembling

5. Connect the IR sensor and the L2X2 frame using bolts and nuts. Turn the IR sensor upside down then put it on the 20mm support that is fixed on the main frame and tighten it using nuts.
AssemblingAssembling

6. fix the LED boards to the IR sensor uaing 7mm supports, bolt and nut.
AssemblingAssembling

7. Assemble the L2X2 frame and the IR sensor using bolts and nut, and then connect the L2X6 frame to the 7mm support that is fixed on the 7mm support using nuts.
AssemblingAssembling

8. Put the battery case on the 35mm supports that are fixed on the main frame, and then tighten it using 20mm supports.
AssemblingAssembling

9. Insert the contact switch and the DC motor driver to the 20mm supports and put the CPU board on the top of them and tighten it using nuts.
AssemblingAssembling

10. Connect the battery case cable and power connector of CPU board. Connect the DC motor cable to the DC motor drive board.
AssemblingAssembling

11. Using 3pin cables, connect the OUT ports No.1, No.2, No.3, and No.4 of the CPU board to the ports 1, 2, 3, and 4 of the DC motor drive board in order. Connect OUT port No.5 and No.6 to the LED boards using 3pin cables.
AssemblingAssembling
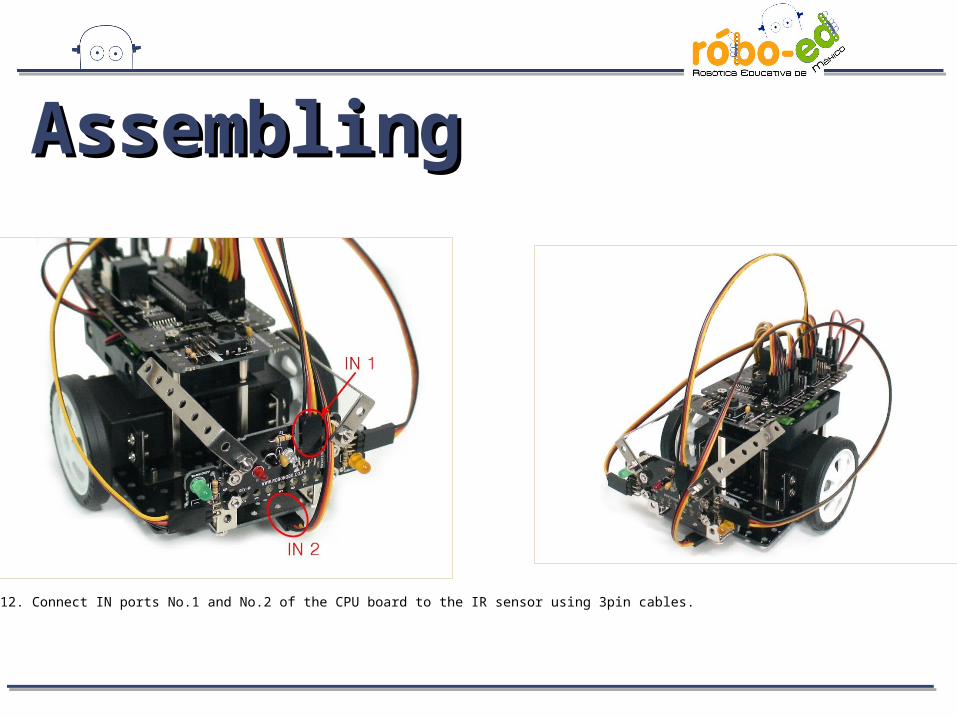
12. Connect IN ports No.1 and No.2 of the CPU board to the IR sensor using 3pin cables.
AssemblingAssembling