Embed Size (px)
Citation preview
Università degli Studi di Bologna II Facoltà di Ingegneria con sede a Cesena Corso di Laurea in Ingegneria Meccanica
ESERCITAZIONI DI DINAMICA DELLE MACCHINE E
DEI SISTEMI MECCANICI
Anno Accademico 2008-2009
prof. Alessandro RIVOLA Tel. 0543 374441

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 1
Università degli Studi di Bologna – II Facoltà di Ingegneria con sede a Cesena ESERCITAZIONI del CORSO di
DINAMICA DELLE MACCHINE E DEI SISTEMI MECCANICI LS per allievi del Corso di Laurea Specialistica in INGEGNERIA MECCANICA
Anno Accademico 2008-2009
prof. Alessandro RIVOLA (Tel. 0543 374441 e-mail: [email protected])
1 Riduzione di forze e masse. 2 Impianto di frenatura. (*) 3 Scelta di un innesto a frizione. (*) 4 Analisi del transitorio di un ventilatore. (*) 5 Calcolo del volano in un impianto funzionante in condizioni di regime periodico. (*) 6 Calcolo di costanti elastiche. 7 Applicazione del metodo energetico. 8 Frequenza propria di una colonna con serbatoio elevato. (*) 9 Applicazione del metodo energetico. 10 Risposta di un sistema ad un gdl ad una eccitazione a gradino con rampa iniziale. 11 Sistema a 2 gdl. 12 Vibrazioni torsionali di un motore marino. (*) 13 Modifiche strutturali. (*) 14 Applicazione del metodo di Rayleigh ad un continuo. 15 Definizione dei parametri di acquisizione. (*) 16 Vibrazioni flessionali con FEM. (*) I1 MATALAB: zero di funzione. I2 MATLAB: integrazione di equazioni differenziali (ODE). I3 MATLAB: calcolo di autovalori e autovettori di una matrice. I4 SIMULINK: integrazione di equazioni differenziali. I5 SIMULINK: integrazione di equazioni differenziali non lineari: presenza del gioco. I6 SIMULINK: modelli elementari di meccanismi. S1 Esercitazione sperimentale.
Misura di frequenze naturali. Scelta dei parametri di acquisizione. Eccitazione di una struttura con shaker elettrodinamico. Eccitazione di una struttura con martello strumentato. Rilievo sperimentale di FRF. Osservazioni sulla funzione coerenza. Estrazione dei parametri modali. Animazione dei modi di vibrare.
ESERCITAZIONI: MODALITÀ DI ESAME Le esercitazioni riguardano complementi ed applicazioni degli argomenti del corso. Tutte le esercitazioni svolte ed elencate sono materia di esame. I testi sono disponibili in segreteria e sul sito del docente http://diem1.ing.unibo.it/mechmach/rivola.html. Alcune esercitazioni sono contraddistinte da un asterisco (*). Al momento di sostenere l’esame, l’allievo è tenuto a consegnare alla commissione esaminatrice tali esercizi, svolti secondo le seguenti modalità: 1. Gli esercizi devono venire eseguiti su fogli formato A4 o su un quaderno dello stesso formato. Sul quaderno - o
su ciascuno dei fogli - devono essere chiaramente indicati cognome, nome e numero di matricola dell’allievo. 2. Non è ammesso scrivere a matita. 3. Lo svolgimento deve contenere: il testo e i dati dell’esercizio; l’elenco dei simboli con il relativo
significato numerico; la traccia dello svolgimento; tutte le formule impiegate, scritte prima in forma letterale e poi con i valori numerici delle varie quantità; i risultati, con l’indicazione delle unità di misura; i grafici qualora richiesto.
4. Il sistema di unità di misura adottato è il Sistema Internazionale (SI).
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 2
TABELLA di RIEPILOGO DEI RISULTATI
EX 2 - IMPIANTO DI FRENATURA Somma ultime due cifre numero di matricola
Coppia frenante Lavoro dissipato Tiro fune
[Nm] [J] [N] EX 3 - TRANSITORIO DI AVVIAMENTO TRAMITE INNESTO A FRIZIONE Resto divisione per 4 del n. di matricola Vel. angolare a REGIME [rad/s] Coppia a REGIME [Nm] Scelta innesto No. Istante di sincronismo ts [s] Durata fase per il raggiungimento del regime Tr [s] Durata totale del transitorio: T = Tc+Ts+Tr [s] Lavoro dissipato in una operazione di innesto [J] Massima frequenza ammissibile [Hz] No. di inserzioni richiedenti la regolazione del tra ferro No. totale di inserzioni EX 4 - TRANSITORIO DI AVVIAMENTO DI UN VENTILATORE ultima cifra del numero di matricola Omega 1 segnato [rad/s] Omega di regime [rad/s] Istante t1 [s] Istante TR (99% regime) [s] 99% omega di regime [rad/s] EX 5 - DIMENSIONAMENTO DEL VOLANO ultime due cifre, u e v, del numero di matricola Vel. angolare minima Omega1 [rad/s] Vel. angolare massima Omega0 [rad/s] Momento di inerzia del volano [kgm2] Motore scelto No. Potenza [W] EX 8 - FREQUENZA PROPRIA FLESSIONALE DI UN SERBATOIO ELEVATO ultime due cifre, u e v, del numero di matricola u= v= Prima frequenza propria [Hz] EX 12 - VIBRAZIONI TORSIONALI DI UN MOTORE MARINO ultima cifra del numero di matricola v= Prima frequenza propria [Hz] Seconda frequenza propria [Hz] Rapporto r1=[Φ2/Θ1]1 Rapporto r2=[Φ2/Θ1]2 EX 13 – MODIFICHE STRUTTURALI ultime due cifre, u e v, del numero di matricola u= v= Prima frequenza propria [rad/s] Seconda frequenza propria [rad/s] Terza frequenza propria [rad/s] Seconda frequenza propria dopo le modifiche [rad/s] EX 15 – DEFINIZIONE DEI PARAMETRI DI ACQUISIZIONE ultime due cifre, u e v, del numero di matricola u= v= Frequenza di taglio del filtro passa basso (anti-aliasing) [Hz] Frequenza di campionamento minima [Hz] Il numero di punti da elaborare tenendo conto che si desidera utilizzare l’algoritmo FFT EX 16 – VIBRAZIONI FLESSIONALI CON FEM ultima cifra del numero di matricola v= Prima frequenza propria [Hz] Seconda frequenza propria [Hz] Primo Modo w3= w4= w5= w6= Secondo Modo w3= w4= w5= w6=

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 3
Esercitazione 1 – RIDUZIONE DI MASSE E MOMENTI DI INERZIA Esercizio 1
(“Mechanical vibrations”, S.S. Rao, p. 33)
Per l’ingranaggio pignone–dentiera di figura, dati la massa m della dentiera, il raggio primitivo R del pignone ed il suo momento di inerzia JO (rispetto al suo asse di rotazione O), trovare: (i) la massa equivalente del sistema
ridotta alla coordinata x (ii) il momento di inerzia equivalente
ridotto all’asse O.
22
21
21
θ&& oJxmT +=
Esercizio 2 Due cilindri, aventi momenti di inerzia J1 e J2, sono calettati su due alberi paralleli rigidi e di massa trascurabile, collegati da un ingranaggio le cui due ruote, indicate con 1 e 2 in figura, hanno rispettivamente numero di denti pari a n1 e n2 e massa trascurabile. Trovare il momento di inerzia equivalente risotto alla coordinata θ1. (“Mechanical vibrations”, S.S. Rao, p. 82) Esercizio 3 Per il meccanismo di figura, dati la massa m del carrello, la massa m2 del membro rigido 2, il momento di inerzia J1 del membro rigido 1 rispetto al suo asse di rotazione O, il momento di inerzia baricentrico JpG della puleggia, la massa mc del cilindro ed il suo momento di inerzia baricentrico JcG, trovare la massa equivalente del sistema ridotta ad un punto del carrello. Si noti che il membro rigido 1 ruota solidalmente alla puleggia.
(“Mechanical vibrations”, S.S. Rao, p. 35)
22
22
222
1122
21
21
21
21
21
21
ccGcppG JxmxmJJxmT θθθ &&&&&& +++++=
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 4
Esercizio 4 Con riferimento alla seguente figura, trovare la massa equivalente del sistema ridotta alla coordinata x.
(“Mechanical vibrations”, S.S. Rao, p. 81)
Esercizio 5 Per il meccanismo di distribuzione di figura sono note le proprietà inerziali dei membri dotati di moto alterno: la massa mp dello spintore, la massa mr del bilanciere, il suo momento di inerzia baricentrico JrG, la massa mv della valvola. Ritenendo le masse di rotella e molla trascurabili, trovare la massa alterna equivalente del meccanismo assumendo che tale massa sia collocata:
(i) nel punto A (ii) nel punto C
(“Mechanical vibrations”, S.S. Rao, p. 36)
2222
21
21
21
21
rrrrGvvpp xmJxmxmT &&&& +++= θ

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 5
Esercitazione 2 – IMPIANTO DI FRENATURA (*) Determinare la coppia frenante che deve essere applicata dal freno per arrestare l’impianto di montacarichi schematizzato in figura nell’intervallo di tempo ∆t. Si ipotizzi che durante la manovra di arresto la coppia frenante sia costante e la coppia fornita dal motore sia nulla ed, inoltre, che all’inizio della manovra stessa il carico stia scendendo con velocità v costante. Si calcoli inoltre:
- il lavoro dissipato dal freno durante la manovra di arresto; - l’intensità della forza sollecitante la fune durante la frenatura.
Q = peso del carico v = velocità di discesa del carico all’inizio della manovra R = raggio del tamburo ∆t = tempo di frenatura J1
= momento di inerzia complessivo dei componenti a monte del riduttore J2
= momento di inerzia complessivo dei componenti a valle del riduttore τ = rapporto di trasmissione del riduttore η‘ = rendimento del riduttore nel moto retrogrado
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 6
Esercitazione 3 – SCELTA DI UN INNESTO A FRIZIONE (*) Si consideri un impianto (fig. 1) costituito da un motore elettrico asincrono trifase, un innesto a frizione ad azionamento elettromagnetico, un riduttore ad ingranaggi ed una macchina operatrice. Riguardo al motore elettrico, sono noti la potenza, Pn, e lo scorrimento, sn, in condizioni nominali, ed il valore della velocità angolare a vuoto, n10; si determini la caratteristica meccanica, considerandola lineare nel campo di funzionamento normale. Sono noti anche la caratteristica meccanica della macchina operatrice, M3 = M30 + k3Ω3 (il momento resistente M3 è somma di un termine costante M30 ed uno dipendente linearmente dalla velocità angolare Ω3), il rapporto di trasmissione del riduttore, τr, il momento di inerzia delle parti a monte dell'innesto, J1, e quello delle parti poste a valle dell'innesto stesso, J3, ridotto all'asse della macchina operatrice. In tab. 1 sono riportate le caratteristiche tecniche di una serie di innesti a frizione dello stesso tipo (fig. 2), in ordine crescente di dimensioni. Si scelga tra questi l'innesto che soddisfa le seguenti condizioni: 1) il momento applicato alla macchina operatrice non superi il valore M3max; 2) la durata globale T del transitorio di avviamento con macchina operatrice ferma e motore funzionante
a vuoto, non superi il valore Tmax; T è il tempo intercorrente tra l'istante in cui è azionato l'elettromagnete e l'istante in cui l'impianto ha raggiunto il 99% della velocità di regime;
3) il lavoro dissipato in una singola operazione di innesto, Lp, non sia superiore al massimo valore ammissibile per l'innesto scelto (v. tab. 1);
Per motivi di ingombro, inerzia e costo, la scelta deve cadere sull'innesto di dimensioni più piccole che soddisfa le condizioni precedenti. Si consideri costante il momento Mf trasmesso dall'innesto in condizioni di slittamento. Si trascurino le perdite per attriti in organi diversi dall'innesto. In base ai dati riportati in tab. 1, si calcoli per l'innesto scelto: 4) la massima frequenza di inserzione ammissibile, fimax; 5) il numero di inserzioni zr intercorrenti tra due operazioni successive di regolazione del traferro; 6) il numero totale di inserzioni zmax durante la vita utile del disco di frizione. Infine si tracci l’andamento in funzione del tempo delle velocità angolari durante il transitorio.
DATI Resto divisione per 4
del n. di matricola Resto divisione per 4
del n. di matricola
0 1 2 3 0 1 2 3
Pn [kW] 4 4 4 7.5 k3 [Nm/(rad/s)] 18 9 25 30
sn 0.05 0.04 0.05 0.03 J1 [kgm²] 0.005 0.005 0.005 0.013
n10 [rpm] 1500 3000 750 750 J3 [kgm²] 1.8 0.9 2.7 3.2
τr 1/15 1/21 1/9 1/7 M3max [Nm] 1200 1000 1400 2200
M30 [Nm] 100 70 120 180 Tmax [ms] 75 75 85 85

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 7
Tab. 1 - Caratteristiche tecniche degli innesti TIPO 3 4 5 6 7 8 9 Mf [Nm] 12 23 43 75 145 280 570
Tc [ms] 10 12 12 20 25 50 60
J1f [10-3kgm2] 0.128 0.319 0.868 1.94 5.0 16.5 45.0
J2f [10-3kgm2] 0.035 0.105 0.297 0.704 1.4 8.1 31.5
Lpmax [kJ] 4.4 6.9 14.8 20 32 50 80
Ppmax [W] 86 112 140 196 290 370 499
Lph [MJ/mm] 143 251 343 509 789 1270 2240 hr [mm] 0.1 0.15 0.2 0.3 0.4 0.45 0.5
hmax [mm] 0.8 1.0 1.2 1.4 1.7 1.8 2.0 Mf - momento trasmesso in condizioni di slittamento Tc - durata della fase di accostamento delle superfici di frizione (recupero del traferro) J1f - momento di inerzia delle parti dell'innesto solidali con l'albero motore J2f - momento di inerzia delle parti dell'innesto solidali con l'albero condotto Lpmax - lavoro dissipato massimo ammissibile per ogni operazione di innesto
Ppmax - valore massimo ammissibile della potenza media dissipata Lph - lavoro dissipato per unità di spessore usurato del disco di frizione hr - spessore usurato richiedente la regolazione del traferro hmax - spessore massimo utile del disco di frizione
Fig. 1 – Schema dell'impianto
Fig. 3 – Sistema ridotto
Fig. 2 – Innesto a frizione ad
azionamento elettromagnetico
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 8
Esercitazione 4 – TRANSITORIO DI AVVIAMENTO (*) L'impianto di fig.l è costituito da un motore elettrico asincrono trifase, da un riduttore ad ingranaggi e da un ventilatore. Il riduttore è a sua volta costituito da due ruote dentate A e B. Si richiede di: Valutare il tempo TR necessario per portare il ventilatore alla velocità di regime ωR. Tracciare l’andamento in funzione del tempo della velocità angolare durante il transitorio.
DATI ξ ultima cifra del numero di matricola Motore:
nmm
n
n
m
MM
rpmrpm
kWP
mkgI
⋅
+=
==
=
⋅+=
200.2
nominale)(velocità 1420a vuoto)(velocità 1500
nominale)(potenza 5
inerzia) (mom.200
05.0
0
1
10
2
ξ
ωω
ξ
Riduttore:
ruota B)inerzia (mom.10100
2.1
A)ruota inerzia (mom.1010
0.2
10020
21
24
mkgI
mkgI
zz
B
A
B
A
⋅⋅
+=
⋅⋅
+=
+=+=
−
−
ξ
ξ
ξξ
Ventilatore:
ntilatore)inerzia ve (mom.10
0.30
nominale)(velocità280
nominale)(potenza4
2mkgI
rpmnkWP
v
v
v
n
n
⋅+=
=
=
ξ

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 9
fig. 2 – Caratteristica meccanica del motore fig. 3 – Caratteristica meccanica del ventilatore Esempio numerico:
nmm
n
n
m
MMrpmrpm
kWPmkgI
⋅===
=⋅=
5.214201500
505.0
0
1
10
2
ωω
21
24
1025.1
100.22.0
mkgImkgI
B
A
⋅⋅=
⋅⋅=
=
−
−
τ
25.30
280
4
mkgI
rpmnkWP
v
v
v
n
n
⋅=
=
=
Risultati: Omega 1 segnato = 136.1357 [rad/s] Omega di regime = 149.9668 [rad/s] Istante t1 = 2.2985 [s] Istante TR (99% regime) = 2.9459 [s] 99% omega di regime = 148.4671 [rad/s]
0 1 2 3 4 5 60
50
100
150
200
250Transitorio di avviamento
Tempo [s]
Vel
ocita
' ang
olar
e [ra
d/s]
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 10
Esercitazione 5 – DIMENSIONAMENTO DEL VOLANO (*)
Si consideri un impianto funzionante in servizio continuo in condizioni di regime periodico. L'impianto è costituito da un motore asincrono trifase a quattro poli, un riduttore ed una macchina operatrice di tipo rotativo.
Il motore, alimentato in corrente alternata a 50 Hz, ha potenza nominale Pn, scorrimento nominale sn e momento d'inerzia Jm. Al variare dell'angolo di rotazione dell'albero motore il momento resistente della macchina operatrice ridotto all'asse del motore ha andamento costante a tratti: all'interno del periodo vale Mrl per i primi gl giri dell'albero motore, ed è pari ad Mr2 per i successivi g2 giri. Sia inoltre J0 il momento d'inerzia dell'intero impianto, ad esclusione del motore, ridotto all'albero motore.
Si richiede di: - scegliere il motore elettrico all'interno della gamma fornita; - calcolare il momento d 'inerzia del volano da calettare sull'albero motore per conseguire il grado di
irregolarità δ assegnato. DATI I dati sono espressi in funzione delle ultime due cifre, u e v, del numero di matricola (numero di matricola = #####uv). Mrl = 50 + 2 u2 + 3 uv + 10 v [N m] gl = 12 + u [giri] Mr2 = 7 + v [N m] g2 = 16 - v [giri] J0 = 1 + v/4 [kg m2] δ = 0.014 Motori elettrici disponibili:
1 2 3 4 5 6 Pn [kW] 5.5 7.5 11. 15 18.5 22. Sn [%] 4.67 4.67 4.00 3.67 3.33 3.33 Jm [kgm2] 0.0165 0.0213 0.049 0.063 0.103 0.123
7 8 9 10 11 12 Pn [kW] 30. 37. 45. 55. 75. 90. Sn [%] 3.00 2.67 2.33 2.00 2.00 2.00 Jm [kgm2] 0.183 0.318 0.383 0.570 0.930 1.168

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 11
Esercitazione 6 – CALCOLO DI COSTANTI ELASTICHE Esercizio 1 Con riferimento al propulsore ad elica di figura, determinare la rigidezza torsionale dell’albero, noto il modulo di elasticità tangenziale del materiale G = 8 × 1010 N/m2.
Esercizio 2 Con riferimento all’impianto di sollevamento di figura, determinare la costante elastica equivalente del sistema quando lunghezza libera della fune è pari a l.
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 12
Esercizio 3 Con riferimento al carrello ferroviario mostrato in figura, determinare la costante elastica equivalente di ciascuna sospensione realizzata con tre molle ad elica in acciaio (modulo di elasticità tangenziale G = 8 × 1010 N/m2) aventi diametro D = 20 cm e diametro della spira d = 2 cm.
Esercizio 4
Con riferimento alla macchina per sollevamento carichi di figura, determinare la costante elastica equivalente del sistema in direzione verticale. Il puntone è realizzato in acciaio ed ha una sezione costante pari a 2500 mm2, il cavo è anch’esso in acciaio con sezione pari a 100 mm2. Si trascuri l’influenza del tratto di cavo CDEB.

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 13
Esercitazione 7 – APPLICAZIONE DEL METODO ENERGETICO Determinare la pulsazione naturale di un cilindro di raggio r e massa m che rotola senza strisciare entro un tubo di raggio R.
)( 10 hhmghmgV −=∆= ϑ=10ˆGOG Ω=ϑ&
Energia potenziale
2)()cos1)((
2ϑϑ rRmgrRmgV −≈−−=
2)(21
Θ−= rRmgVMAX
Energia cinetica
( )222
21
ωGG ImvT +=
2
2mrIG = ωϑ rrRvG =−= &)(
22222
2 )(43
2)(
21 ϑϑ && rRm
rrRmrrRmT −=
−+−=
222)(43
Θ−= nMAX rRmT ω
0)( =+VTd 0)()(23 2 =−+− ϑϑϑϑ &&&& rRmgrRm 0
)(32
=−
+ ϑϑrR
g&&
tnωϑ cosΘ= )(3
2rR
gn −
=ω
MAXMAX TV = à 2222 )(23
21)(
21 Θ−=Θ− nrRmrRmg ω à
)(32
rRg
n −=ω
G1
h0 h1 R
r
O
G0
Ω ω
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 14
Esercitazione 8 – FREQUENZA PROPRIA DI UNA COLONNA CON SERBATOIO ELEVATO (*) Determinare la prima frequenza propria di vibrazione flessionale della colonna con serbatoio elevato mostrata in figura, supponendo che la sezione tubolare della colonna sia costante. Si esprima il risultato in Hz utilizzando almeno cinque cifre significative. Dati: D = diametro esterno della colonna d = diametro interno della colonna l = lunghezza della colonna E = modulo di elasticità del materiale della colonna Q = peso del serbatoio ρ = massa volumica del materiale della colonna
I dati sono espressi in funzione delle ultime due cifre, u e v, del numero di matricola (numero di matricola = #####uv). D = 3. + u/10 [m] ρ = 2400 + v2 + u [kg/m3] d = 2.45 + v/30 [m] E = 2.8 × 1010 [N/m2] l = 90 + u2 /5 – v [m] Q = (2.7 + u2 /100 + uv /50) × 106 [N]

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 15
Esercitazione 9 – APPLICAZIONE DEL METODO ENERGETICO Trovare la frequenza naturale di oscillazione del sistema rappresentato in figura, costituito da un cilindro omogeneo di raggio r, massa m e momento di inerzia baricentrico JG, vincolato a telaio da due molle di rigidezza k, nell’ipotesi che il cilindro rotoli sul piano senza strisciare. Dati: m massa del cilindro r raggio del cilindro k rigidezza delle molle a distanza tra il baricentro del disco e il punto di attacco delle molle
m, J k
G
G
r
θ
k
a
Risultato: 2
2
3)(4
mrark
n+=ω
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 16
Esercitazione 10 – RISPOSTA DI UN SISTEMA SDOF AD UNA ECCITAZIONE A GRADINO CON RAMPA INIZIALE
Determinare la risposta del sistema ad un grado di libertà rappresentato in figura, per una eccitazione a gradino di ampiezza F0 preceduta, per 0 < t < t1, da una rampa.
m
k
F(t)
x(t)
Dati: m massa k costante elastica della molla F0 ampiezza del gradino t1 istante finale della rampa
∫ −=t
dthFtx0
)()()( τττ tm
th nn
ωω
sin1)( =
−=
11
01
sin)(t
ttt
kFtx
n
n
ωω
−−
−=−
1
1
1
1011
)(sin)(t
ttt
ttkFttx
n
n
ωω
0 0.2 0.4 0.6 0.8 1-4
-2
0
2
4
x1(t)
-x1(t-t
1)
t1
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
t1
t
F(t)
F0
0 t1
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 17
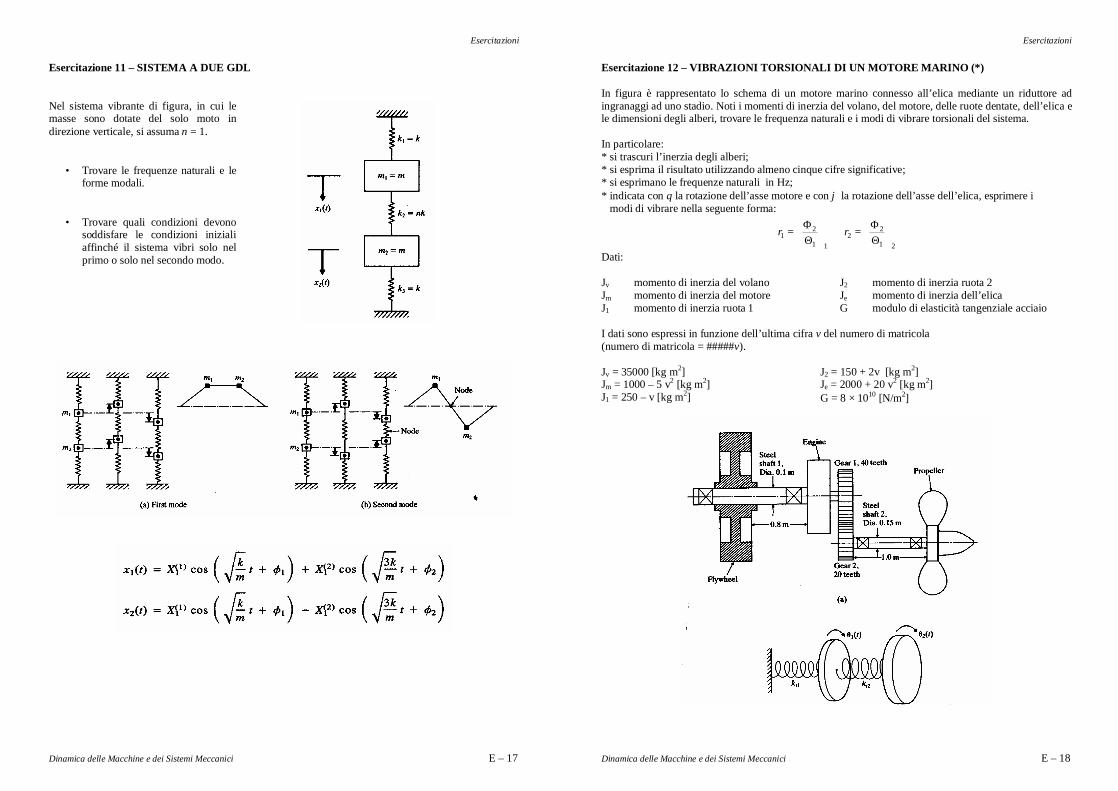
Esercitazione 11 – SISTEMA A DUE GDL
Nel sistema vibrante di figura, in cui le masse sono dotate del solo moto in direzione verticale, si assuma n = 1.
• Trovare le frequenze naturali e le forme modali.
• Trovare quali condizioni devono soddisfare le condizioni iniziali affinché il sistema vibri solo nel primo o solo nel secondo modo.
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 18
Esercitazione 12 – VIBRAZIONI TORSIONALI DI UN MOTORE MARINO (*) In figura è rappresentato lo schema di un motore marino connesso all’elica mediante un riduttore ad ingranaggi ad uno stadio. Noti i momenti di inerzia del volano, del motore, delle ruote dentate, dell’elica e le dimensioni degli alberi, trovare le frequenza naturali e i modi di vibrare torsionali del sistema. In particolare: * si trascuri l’inerzia degli alberi; * si esprima il risultato utilizzando almeno cinque cifre significative; * si esprimano le frequenze naturali in Hz; * indicata con θ la rotazione dell’asse motore e con ϕ la rotazione dell’asse dell’elica, esprimere i modi di vibrare nella seguente forma:
11
21
ΘΦ
=r 21
22
ΘΦ
=r
Dati: Jv momento di inerzia del volano Jm momento di inerzia del motore J1 momento di inerzia ruota 1
J2 momento di inerzia ruota 2 Je momento di inerzia dell’elica G modulo di elasticità tangenziale acciaio
I dati sono espressi in funzione dell’ultima cifra v del numero di matricola (numero di matricola = #####v). Jv = 35000 [kg m2] J2 = 150 + 2v [kg m2] Jm = 1000 – 5 v2 [kg m2] Je = 2000 + 20 v2 [kg m2] J1 = 250 – v [kg m2] G = 8 × 1010 [N/m2]

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 19
Esercitazione 13 – MODIFICHE STRUTTURALI (*) In figura è rappresentato un sistema a 3 gdl. Noti i valori delle masse e delle rigidezze, calcolare: 1) le 3 pulsazioni naturali del sistema (in rad/s) 2) le 3 forme modali (eseguire la normalizzazione in modo che la prima componente sia unitaria) Inoltre, introdotte nel sistema le modifiche strutturali indicate nel seguito, calcolare il nuovo valore della seconda pulsazione propria del sistema impiegando il quoziente di Rayleigh.
m
k
m
m
k
k
1
2
3
3
2
1
Dati: m = 1 + u / 10 [kg] k = 1 – v / 10 [N/m] m1 = 2 m m2 = 3 m m3 = 2 m k1 = 4 k k2 = 3 k k3 = 5 k
Modifiche strutturali: ∆m3 = 0.4 m ∆k2 = 0.7 k
I dati sono espressi in funzione delle ultime due cifre, u e v, del numero di matricola (numero di matricola = #####uv).
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 20
Esercitazione 14 – APPLICAZIONE DEL METODO DI RAYLEIGH AD UN CONTINUO Utilizzare il metodo di Rayleigh per calcolare la prima frequenza propria del sistema rappresentato in figura. La trave ha modulo elastico E, momento di inerzia di sezione I, sezione S, densità ρ ed alla sua estremità si trova una massa concentrata m. Nella sua mezzeria la trave è collegata a telaio mediante una molla di rigidezza k. Si suggerisce di impiegare la funzione di forma seguente:
−
=
32
3)(Lx
Lxxϕ
k
mL/2 L/2
)(3)()(),(32
tfLx
Lxtfxtxv
−
== ϕ
[ ] [ ]
+=+
−=
=+
=+
∂∂
=
∫
∫∫ ==
642512)(
21
6425)(
21136)(
21
)()(21)(
21),(
21
21
322
0
2
42
22/
2
0
2
2
22
2/0
2
2
2
kL
EItftfkdxLx
LtfEI
xtfkdxdxdtfEItxvkdx
xvEIV
L
Lx
L
Lx
L
ϕϕ
[ ] [ ]
+=
=+=+
−
=
=+=
∂∂+
∂∂=
∫
∫∫ ==
mLStf
tfmLtfStfmdxLx
LxtfS
xtfmdxxtfStvmdx
tvST
L
Lx
L
Lx
L
43533)(
21
4)(21
3533)(
214)(
213)(
21
)()(21)()(
21
21
21
2
222
0
2322
22
0
22
0
2
ρ
ρρ
ϕϕρρ
&
&&&&
&&
Equazione del moto: 0642512)(4
3533)( 3 =
++
+ k
LEItfmLStf ρ&&
Risultato: mSL
kLEI
43533
642512 3
1+
+=
ρω

Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 21
Esercitazione 15 – DEFINIZIONE DEI PARAMETRI DI ACQUISIZIONE (*) Si vogliono effettuare rilievi sperimentali di vibrazione su una struttura. L’analisi va condotta all’interno del campo di frequenze 0 ÷ f* e, ai fini dell’analisi, occorre ottenere una risoluzione spettrale massima pari a ∆f. Determinare:
1. La frequenza di taglio del filtro passa basso anti-aliasing 2. La frequenza di campionamento minima 3. Il numero di punti da elaborare tenendo conto che si desidera utilizzare l’algoritmo FFT (Fast
Fourier Transform)
Dati: f* = 3000 + 10 u – 20 v [Hz] ∆f = 10 + 0.1 uv + 0.5 v2 [Hz] I dati sono espressi in funzione delle ultime due cifre, u e v, del numero di matricola (numero di matricola = #####uv).
Esercitazioni
Dinamica delle Macchine e dei Sistemi Meccanici E – 22
Esercitazione 16 – VIBRAZIONI FLESSIONALI CON FEM (*) In figura è rappresentata una trave incastrata ad entrambi gli estremi avente sezione quadrata con dimensioni variabili a tratti. Note le dimensioni della trave e le caratteristiche del materiale (modulo di Young E e densità ρ), trovare le prime due frequenze naturali e i rispettivi modi di vibrare flessionali del sistema impiegando il metodo degli elementi finiti. In particolare: * modellare la trave con tre elementi di tipo beam; * esprimere le frequenze naturali in Hz; * normalizzare le forma modali in modo da porre la massima componente al valore unitario. I dati sono espressi in funzione dell’ultima cifra v del numero di matricola (numero di matricola = #####v). l1 = 0.4 – v/200 [m] a = 0.02 [m] l2 = 0.32 +v/100 [m] b = 0.03 [m] ρ = 7800 [kg/m3] l3 = 0.24 + v/100 [m] c = 0.01 [m] E = 2.06 × 1011 [N/m2]
l1 l2 l3
a x a b x b c x c





























