Embed Size (px)
Citation preview

1
The design of the multivariate synthetic-T2
control chart. Francisco Aparisi1 and Marco A. de Luna2.
1Departamento de Estadística e Investigación Operativa Aplicadas y Calidad.
Universidad Politécnica de Valencia.
46022 Valencia. España. [email protected] 2Departamento de Ingeniería Industrial y Mecánica. ITESM
45140 Guadalajara, México. [email protected]
ABSTRACT
One of the objectives of the research done in statistical process control is to obtain
control charts that show few false alarms but, at the same time, are able to detect
quickly the shifts in the distribution of the quality variables employed to monitor a
productive process. In this paper the synthetic-T2 control chart is developed, which
consists of the simultaneous use of a CRL chart and a Hotelling’s T2 control chart. A
procedure of optimization has been developed to obtain the optimum parameters of the
synthetic-T2, given the values of in-control ARL and magnitude of shift which needs to
be detected rapidly. The comparison versus the charts MEWMA, T2 with variable
simple size and T2 with double sampling shows that the synthetic-T2 chart always
performs better than the standard T2 chart. The comparison with the remaining charts
reveals in which cases the performance of this new chart makes it interesting to employ
in real applications.
KEY WORDS: synthetic, multivariate, SPC, quality control, ARL
Correspondence author: Francisco Aparisi

2
1.- INTRODUCTION
The statistical quality control has the objective of detecting shifts in the distribution of
the quality variable(s) that are monitored. In the majority of productive processes the
possible spontaneous changes in this distribution will worsen the quality of the product
manufactured. Therefore, the quick detection of these shifts is very important to
maintain quality. The statistical process control (SPC) has shown itself to be a powerful
tool to achieve this objective.
It is possible to employ two strategies when it is desired to control simultaneously p
variables from one piece or from a productive process: to use simultaneously p
univariate control charts or to employ only one multivariate control chart [Montgomery
(2005)]. During many years a lot of research has been made in order to design control
charts capable of detecting quickly small shifts in the process. The problem is that the
standard control charts ( X in the univariate case and Hotelling’s T2 in the multivariate
case) are not efficient in detecting small shifts. The efficacy of a quality control chart is
normally measured using the ARL (Average Run Length), the average number of points
in the chart until the first out-of-control signal appears. In the classical design of control
charts, a chart is considered efficient when shows a large value of ARL when the
process is in an in-control state, but having low ARL to detect a shift that produces an
out-of-control state.
Many strategies have been proposed with the aim of improving the ARL values when
the process is out of control, keeping a desired ARL value when the process is in
control. From our point of view, the more efficient strategies are: 1.- Cummulative
sums, in the univariate case the CUSUM charts [Luceno and Puig-Pey (2000), Jones,

3
Champ and Rigdon (2004)] and in the multivariate case the MCUSUM charts [Woodall
and Ncube (1985) and Khoo and Quah (2002)]. 2.- The charts employ exponentially
weighted averages, the EWMA charts in the univariate case [Lucas and Saccucci (1990)
and Knoth (2005)] and MEWMA charts for the multivariate case [Lowry, Woodall,
Champ and Rigdon (1992), Prabhu and Runger (1997) and Aparisi and García-Díaz
(2004)]. 3.- The use of the variable sample size [VSS univariate charts: Costa (1994,
2001), Reynolds and Arnold (2001); VSS multivariate case: Aparisi (1996), Aparisi and
Haro (2003)]. 4.- The use of the double sampling [univariate DS charts: Daudin (1992),
Carot, Jabaloyes and Carot (2002), He and Grigoryan (2006); multivariate DS charts:
He and Grigoryan (2005), Champ and Aparisi (2006)]. 5.- The use of the synthetic
charts, only developed for the univariate case [Wu and Spedding (2000) and Chen and
Huang (2005a)].
The performance of the SPC has been improved employing simultaneously two control
charts. Examples of this strategy are: the Shewhart-CUSUM chart [Lucas (1982)], the
Shewhart-EWMA chart [Klein (1997)] and the synthetic chart, which is a Shewhart-
CRL (conforming run length) chart. The synthetic- X chart was introduced by Wu and
Spedding (2000) as a control chart useful for detecting small shifts in the mean of a
process. Calzada and Scariano (2001) and Scariano and Calzada (2003) studied the
robustness of this charts and developed a synthetic chart for quality variables with
exponential distribution.
All the previous referenced methodologies have been developed for univariate and
multivariate cases, except the synthetic chart. In this paper the multivariate synthetic-T2
chart will be developed, obtaining a procedure to find the parameters of this chart that

4
minimises the ARL for a given size of shift, and given a desired in-control ARL.
Section 2 shows a summary of multivariate SPC and the methodologies which enables
more efficient control charts to be obtained. In Section 3 the synthetic-T2 chart is
defined. The optimization of the parameters of this chart can be found in Section 4.
Section 5 shows the comparison between several multivariate control charts, in order to
find out in which cases the synthetic-T2 chart shows better performance. The
conclusions can be found in Section 6.
2.- MULTIVARIATE QUALITY CONTROL
As was commented in the Introduction, the multivariate quality control consists of
monitoring in one chart p variables of the same productive process or piece. The first
proposal to control possible shifts in the mean vector was Hotelling’s T2 control chart
[Hotelling (1947)] that consist of plotting the values of the statistic 2iT ,
( ) ( )120 00
Ti i iT n −= − −∑X Xμ μ (1)
where n is the sample size, iX is the mean vector of the p sample means, 0μ is the
mean vector when the process is in control and 0Σ is the in-control covariance matrix.
The distribution of the statistic 2iT , if the process is in an in-control state and 0μ and
0Σ are known, is a chi-square with p degrees of freedom. Therefore, it is easy to obtain
the control limit (CL) fixing the probability of the Type I error, α. Given the value of α,
the control limit is 2,pCL X α= .

5
As the points plotted in the Hotelling’s T2 chart are independent, the in-control ARL is
given by 01ARLα
= . The performance of this chart to detect shifts in the mean vector
depends on the non-centrality parameter 2ndλ = , where d is the Mahalanobis’ distance,
( ) ( )11 0 1 00
Td −= − −∑μ μ μ μ , where 1μ is the out-of-control mean vector. The value
of ARL when d ≠ 0 is 1( 0)1
ARL dβ
≠ =−
(where β is the probability of the type II
error) is easily calculated, knowing the distribution of the 2iT statistic when the process
is out of control, a non-central chi-square, )( 222 ndXT p =≈ λ .
Commonly, the mean vector and the covariance matrix are estimated. Lowry and
Montgomery (1995) and Champ, Jones-Farmer and Rigdon (2005) present guides for
the design of the T2 control chart with estimated parameters. Vargas (2003) and
Williams, Woodall, Birch and Sullivan (2006) have studied alternatives to estimate the
covariance matrix for the case of individual multivariate observations.
As was commented, the T2 chart has a poor performance to detect small shifts in the
mean vector. In this article, the use of a synthetic-T2 control chart is proposed to reduce
the values of ARL to detect process shifts. The analysis is done employing the zero-
state approach [Champ (1992) and Zhang and Wu (2005)] and considering that 0Σ and
0μ are known. Subsequently there will be a description of the multivariate control charts
that are going to be used in the comparison of performance shown in Section 5.

6
2.1 Variable Sample Size T2 control chart
Aparisi (1996) and Aparisi and Haro (2001, 2003) improve the sensibility of the T2
chart employing variable sample size (VSS). The strategy consists of determining the
value of a warning limit (w). The sample size at time i depends on the value of 21−iT . if
wTi ≤−21 a sample of size n1 at the time i is taken. Otherwise, if 2
1iw T CL−< < the sample
size to be used is n2. When 2,
2αpi XT > the process is considered to be out of control,
otherwise, it is decided that only random causes are present in the process. It is possible,
for a given in-control ARL, to find the values of CL, w, n1 and n2 that minimises the
out-of-control ARL for a specified size of magnitude d, considering the restrictions
1 2 maxn n n+ ≤ and a desired mean sample size, 0n , 0)( nnE = .
2.2 MEWMA control chart
The multivariate EWMA control chart, MEWMA, [Lowry, Woodall, Champ and
Rigdon (1992)] is a chart where the plotted statistic takes into account the information
from past samples. The MEWMA control chart shows an out-of-control signal when the
2iT statistic is larger that the control limit (h), selected to obtain a desired in-control
ARL. In order to compute the 2iT statistic is necessary to employ a smoothing
coefficient, r ( 10 ≤< r ). The MEWMA vector is obtained through
1(1 )i i ir r −= + −Z X Z and the statistic to be plotted is given by:
12 T
i i iiT −
= ∑zZ Z (2)

7
being ∑iz
the covariance matrix of iZ , where 0 0=Z μ . The exact covariance matrix
of iZ is computed according to:
21 (1 )
2
i
i
r rr
⎡ ⎤− −⎣ ⎦=−∑ ∑z (3)
It is a common practice to use the asymptotic approximation of the matrix ∑ iz . When
1r = the resultant chart is the Hotelling’s control chart. If the value of r is reduced the
weight of the past samples is more important. Aparisi and García-Díaz (2004) have
developed software that employing genetic algorithms finds the parameters r and h (for
univariate and multivariate cases) that produces the minimum ARL for a given size of
shift and for a given in-control ARL.
2.3 Double Sampling T2 control chart
The strategy of double sampling (DS) consists of taking taken two samples of sizes n1
and n2 from the process at the same time. With the statistical information obtained in the
first sample it is determined whether the process is in control, out of control or whether
it is required to analyze the second sample, and combine it with the first one in order to
make a final analysis. Champ and Aparisi (2006) developed an analytical method to
obtain the ARL of the DS-T2 chart and, employing genetic algorithms, the parameters of
the optimum DS-T2 chart to detect a shift of given magnitude are found.
There are five parameters to define the DS-T2 chart: h, h1, w1, n1 and n2. The 21,iT
statistic is computed only considering the first sample of size n1, employing

8
( ) ( )2 1,1 1 ,1 ,1
Ti i o i oT n −= − −X Xμ μΣ . If 2
,1 1iT h> the process is deemed to be out of
control; if 2,1 1iT w< it is accepted that the process is in an in-control state. However, if
121,1 hTw i <≤ it is not possible to take a decision and the second sample of size n2 is
studied. The two samples are combined employing 1 ,1 2 ,21 2
1 ( )i i in nn n
= ++
X X X . Hence,
2iT is calculated using the expression ( ) ( )2 1
1 2 0 0( )T
i i iT n n μ μ−= + − −X XΣ . If 2iT h>
it is assumed that the process is out-of-control, otherwise the process is deemed to be in
an in-control state.
3.- The Synthetic-T2 control chart
The univariate synthetic chart was introduced by Wu and Spedding (2000) as an
alternative to improve the performance of the Shewhart control chart to detect process
shifts. It is the result of combining a Shewhart chart and a CRL chart (a chart originally
designed to detect increments in the percentage of defective units). The synthetic-
X chart shows better ARL values to detect process shifts, for any shift magnitude, than
the X control chart. In some cases, specially for moderate and large shifts, the
synthetic- X chart has better performance than the EWMA control chart [Wu and
Spedding (2000)].
The synthetic chart has been also applied to monitor the variability of a process [Chen
and Huang (2005a, 2005b)] and the percentage of defective units of a process [Wu, Yeo
and Spedding (2001)]. With the objective of improving the performance of the synthetic
control charts, Chen and Huang (2005b) apply variable sampling intervals (VSI) and

9
Davis and Woodall (2002) improves the performance of the synthetic- X control chart
adding the concept of side-sensitive. However, a multivariate synthetic control has not
been developed.
The synthetic T2 control chart (synthetic-T2) that is going to be defined in this paper
takes benefit of the advantages of the synthetic charts. It is a chart for monitoring
simultaneously two or more quality characteristics. It consists of two sub-charts, a T2
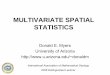
sub-chart and a CRL sub-chart. Figure 1 shows the concept of the synthetic-T2 chart.
The T2 sub-chart has a unique control limit, LCsynt. The CRL sub-chart has a low
control limit, L, 1L ≥ . The value of LCsynt is the criteria to classify a sample as
conforming or non-conforming. The value of L is the criteria to decide if the process is
in control or out of control.
[INSERT FIGURE 1 OVER HERE]
The CRL chart was proposed by Bourke (1991). In the synthetic-T2 chart the value of
CRL is defined as the number of inspected samples between two samples classified as
non-conforming, including the last non-conforming sample. In figure 2 the white circles
represent conforming samples and the black circles show non-conforming samples. In
this Figure four values of CRL are shown, CRL1 = 5, CRL2 = 4, CRL3 = 7, CRL4 = 6,
assuming that the sampling starts at t = 0.
[INSERT FIGURE 2 OVER HERE]

10
The CRL concept assumes that in t = 0 there is a point above the LCsynt limit (a non-
conforming sample in t = 0). This characteristic, called head start, is very important for
the performance of the synthetic charts. When this assumption is ruled out, the
performance of synthetic charts worsens [Davis and Woodall (2002)]. The routine of the
synthetic-T2 chart follows:
1. a sample of size n is taken from the process at time i and the sample mean vector
is computed, 1 2 3( , , ,...., )Ti pX X X X=X . The 2
iT statistic is calculated following
(1).
2. The value of the 2iT statistic is plotted in the T2 sub-chart. If 2
iT LCsynt≤ the
sample is classified as conforming and we move back to point 1. Otherwise, if
2iT LCsynt> , the sample is classified as non-conforming and we continue to the
next point.
3. It is counted the number of samples between this non-conforming sample and the
last one. This number is called CRL sample and it is plotted in the CRL sub-chart.
4. If CRL L> the conclusion is that the process is in an in-control state, and the
control routine begins again in point 1. If CRL L≤ the process is deemed as out of
control.
5. The out of control signal is investigated. If no assignable cause is founded the
signal is considered as a false alarm and we continue to point 1. Otherwise, the
assignable cause must be eliminated.

11
For a synthetic-T2 chart, unlike the T2 control chart, 2iT LCsynt> does not mean that an
out-of-control state has to be assumed, but the inspected sample must be classified as
non-conforming.
Like the T2 control chart, the synthetic-T2 chart shows an out-of-control signal,
indicating the probably there is a shift in the process. However this signal does not
inform us about the variable or variables that have produced the shift. Several methods
for the interpretation of the out-of-control signal of the T2 control chart have been
developed. These methods can also be applied to the synthetic-T2 chart [Mason, Tracy
and Young (1997), Atienza, Tang and Ang (1998), Mason and Young (1999), Kourti
and MacGregor (2004), Aparisi, Avendaño and Sanz (2006)]. Applying these
techniques the global performance of the synthetic-T2 can be improved in comparison
with other multivariate charts that, as it will be show in the comparison made in this
paper, have better performance to detect some type of shifts, but the interpretation of its
out-of-control signal is not sufficiently studied.
4.- Optimization of the parameters of the synthetic-T2 chart
Two values of ARL are important for the design and performance of the synthetic-T2
chart, the in-control ARL [ 2 ( 0)S T
ARL d−
= ] and the out-of-control ARL
[ 2 ( 0)S T
ARL d−
≠ ]. The value of the in-control ARL is selected taking into account the
frequency of false alarms. The value of 2 ( 0)S T
ARL d−
≠ is important in order to rapidly
detect a shift in the mean vector of magnitude d.

12
4.1. Obtaining the ARL values
The value of ARL for a given shift of magnitudeδ , for whatever synthetic chart, is
[Chen and Huang (2005a)]:
[ ] [ ] 1 1( ) * *1 (1 )s CRL LARL E ARL E CRL
q qδ = =
− − (4)
where q is the probability of a sample being non-conforming. Following (4), the ARL of
the synthetic-T2 chart is given by the next formula:
2 2
0 0
1 1( 0) ( , )* ( )* *1 (1 )CRL LS T T
ARL d ARL d LCsynt L ARL d LCsyntq q−
= = =− −
(5)
where 20 P( )iq T LCsynt= > .
Considering (4), when 0d ≠ , the value of ( 0)S TARL d− ≠ is obtained as:
2 2
1 1( 0) ( , )* ( ) *1 (1 )CRL LS T T
d d
ARL d ARL d LCsynt L ARL d LCsyntq q−
≠ = =− −
(6)
where 21 1 P( )d iq T LCsyntβ= − = − ≤ .
4.2. Optimization of the synthetic-T2 control chart
Equations (5) and (6) are employed to find the parameters of the optimum synthetic-T2
control chart to detect a shift d. The optimization process must find the values of L and
LCsynt that minimizes the value of 2 ( 0)S T
ARL d−
≠ for a given shift of magnitude d,

13
taking into account the restriction of the specified in-control ARL, 2 ( 0)S T
ARL d−
= . The
cart that fulfils this design is considered to be optimum to detect a shift of size d in the
mean vector.
The search to find the solution consists of fixing a value of L and to seek a value of
LCsynt that fulfils equation (5), LCsyntL, given 2 ( 0)S T
ARL d−
= . With these values,
2 ( 0)S T
ARL d−
≠ is calculated following equation (6). The process starts with L = 1,
adding one unit, stopping when the value of 2 ( 0)S T
ARL d−
≠ cannot be reduced in
comparison with the previous value of L. The search procedure is halted when
2 21[ ( 0) 1, ] [ ( 0) , ]L LS T S TARL d L LCsynt ARL d L LCsynt+− −
≠ + ≥ ≠ .
Software for Windows ® has been developed. The program finds the parameters of the
optimum synthetic-T2 chart for a given shift magnitude d and a given in-control ARL.
The software is available upon request from the authors or can be downloaded from
http://xxxxx.xx. The output of this program is shown in Figure 3. This software allows
us to obtain the improvement of ARL against Hotelling’s T2 control chart, it draws the
ARL curves of T2 and synthetic-T2 charts, and the user can evaluate the ARL of the
synthetic-T2 chart for a given set of values of p, n, LCsynt, L and d.
[INSERT FIGURE 3 OVER HERE]
As shown in Figure 3, to find the optimum design of the synthetic-T2 chart the user hast
to specify: the number of variables to be monitored, (p) the simple size (n), the desired
in-control ARL, 2 ( 0)S T
ARL d−
= , and the shift magnitude to be detected as soon as

14
possible, d. Figure 3 shows the solution for the problem 2 ( 0) 200S T
ARL d−
= = , p = 3, n
= 4 and d = 0.75. The parameters of the optimum synthetic-T2 chart are: LCsynt =
9.5755 and L = 11, with 2 ( 0.75) 9.81S T
ARL d−
= = . The out-of-control ARL value for
the standard T2 chart is 20.406. Therefore, the reduction in the value of ARL for a shift
d = 0.75 employing the synthetic-T2 chart is 51.9%.
5.- Comparison versus other multivariate charts
5.1. Comparison versus Hotelling’s T2 chart
A comparison of performance between the synthetic-T2 and the standard T2 control
chart [ 2 ( )T
ARL d ] has been carried out. The optimum design of the synthetic-T2 chart
has been utilized in the comparison for different cases of
2 2( 0) ( 0)S T T
ARL d ARL d−
= = = , n, p and d. The ARL values are shown in the two first
columns of Tables 1 to &. The percentage of improvement for the ARL is calculated as:
2 2
2
( 0) ( 0)% of improvement *100
( 0)T S T
T
ARL d ARL dARL d
−≠ − ≠
=≠
(7)
The main important conclusions are:
1.- The synthetic-T2 control chart optimum for a shift d is always faster to detect this
shift than the Hotelling’s T2 chart. For large shifts, d > 2, the percentage of
improvement of the synthetic-T2 chart is better when the sample size is small. For large
sample sizes the performance of both charts is similar for large shifts. In some cases the
improvement is quite significant. For example,
when 2 2( 0) ( 0) 200S T T
ARL d ARL d−
= = = = , p = 2, n = 2 and d = 1.25 the improvement

15
in the ARL is 53.66 %, with ARL values of 2 ( 1.25)T
ARL d = = 9.91
and 2 ( 1.25) 4.59S T
ARL d−
= = . For the same case the percentage of improvement is
larger than 40% for the range 0.75 2d≤ ≤ .
2.- If the synthetic-T2 chart is designed to minimise the ARL for a given shift d, the
optimized chart is also faster than the standard T2 chart for the rest of values of d,
0 3d< ≤ .
3.- The percentage of improvement of the synthetic-T2, for the same set of values of p, n
and d, increases as the value of ( 0)ARL d = is larger.
4.- For the same values of p and ( 0)ARL d = , the optimum parameters of the synthetic-
T2 charts for d are constants, independently of the sample size (if 2≥n ) and magnitude
of shift, d , if the value of d is large. The parameter L takes small values if the chart is
designed for large values of d, but L tends to be small if the chart is optimized for large
values of d.
5.- Influence of the sample size. For n = 1, 2 or 3, the optimum synthetic-T2 for a shift d
is always faster than the standard T2 for detecting shifts of magnitude 0 3d< ≤ . For
sample sizes 4n ≥ the performance of the optimum synthetic-T2 chart is better for small
and moderate shifts, but the improvement is marginal for large shifts. For example, if n
= 7 the improvement is negligible if 2.25d ≥ . This behaviour is logical because the
standard T2 shows ARL values close to one. As the sample size increases, the range of
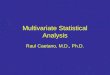
values of d where the synthetic-T2 chart has better performance is narrower. Figure 4

16
shows the ARL values of the optimum synthetic-T2 charts for a shift d. The curves
shown are for the cases ( 0) 200ARL d = = , p = 2, 7≤n and d = 0.25, 0.5,...,2.
[INSERT FIGURE 4 OVER HERE]
For small and moderate shifts ( 0.75d ≤ ), and for the same set of values of ( 0)ARL d = ,
p and d, a larger sample size increases the percentage of improvement. However, when
1.75d ≥ the percentage of improvement of the synthetic-T2 chart is smaller when the
sample size increases.
6.- Influence of the number of variables. The percentage of improvement of the
synthetic-T2 chart depends of the number of variables, p. For the same values of n and d
the percentage of improvement is smaller when more variables are to be controlled if
0.75d ≤ . However, when 1.5d ≥ and 3≥n the percentage of improvement is larger
when the number of variables increases.
5.2. Comparison versus MEWMA, VSS-T2 and DS-T2 charts.
In this Section a comparison of the performance (ARL) of the optimum synthetic-T2
chart for a shift d, versus the optimum MEWMA, VSS-T2 y DS-T2 charts for the same d
is carried out. For the VSS-T2 and DS-T2 charts the restrictions 0( )E n n= and
1 2 20n n+ ≤ must be fulfilled. With these restrictions, first it is guaranteed that, in
average, the same sample size is employed. Secondly, it is very frequent that in order to
find the optimum charts to minimize ( 0)ARL d ≠ for the VSS-T2 and DS-T2 charts, large
values of n2 are obtained, producing solutions that may be not feasible in the real
application.

17
Tables 1 to 6 show the optimum parameters of the control charts that are used in the
comparison and the value of ( 0)ARL d ≠ for d = 0.25, 0.5, … 2.5 and for some
combinations of p and n when ARL(d = 0) = 200. The authors have obtained more
tables for the following cases: p = 2, 3, 4, 5 and 10, n = 1, 2, 3, 5 and 7, ARL(d = 0) =
200 and 400 and d = 0.25, 0.5, … 2.5.
[INSERT TABLES 1 to 6 OVER HERE]
The optimum synthetic-T2 chart for a shift d is faster than the MEWMA and VSS-T2
charts when p = 2 and n is large. For example, when p = 2 and n = 7 the synthetic-T2
chart is superior or equal than the MEWMA chart if 0.75d ≥ . On the other hand,
considering the same case, the synthetic-T2 chart is superior or similar than the VSS-T2
chart when 1d ≥ . However, the range where the optimum synthetic-T2 chart is superior
to these charts worsens as the sample size decreases and the number of variables
increases. For example, if p = 10 and n = 1, the 2 ( 0)S T
ARL d−
≠ is lower than the ARL of
MEWMA if 2.75d ≥
There are some cases where the MEWMA and VSS-T2 charts optimum for a shift d
have an ARL value larger or equal than the standard T2 chart. However, the synthetic-T2
and DS-T2 charts optimum for a shift d always have lower or equal ARL values in
comparison with the standard T2 chart. If the synthetic-T2 chart is designed to minimise
the ARL for a shift d, for the rest of size of shifts, 0 3d< ≤ , it will be always faster to
detect these shifts than the T2 chart. This behaviour does not happen sometimes with
the MEWMA and VSS-T2 charts.

18
In general, the performance of the MEWMA y VSS-T2 charts is better for detecting
small shifts than the synthetic-T2 chart, but this is may not be true for moderate and
large shifts. For a given value of ( 0)ARL d = and number of quality variables, the range
where it is better to use the synthetic-T2 chart instead of the MEWMA control chart
increases as the sample size increases. The synthetic-T2 chart is master thatn the VSS-T2
chart when d = 0.25. However, for this same value, the lowest ARL value is obtained by
the DS-T2chart. For very small shifts the DS-T2 chart has better performance than the
MEWMA.
When 3n ≥ and 10p ≤ the synthetic-T2 chart is faster than the MEWMA and VSS-T2
charts for shifts of magnitude 1.75d ≥ , although the range of d where the performance
of the synthetic-T2 is superior is incremented when the sample size increases and the
number of variables is smaller. Figure 5 shows the ARL values for the optimum designs
for a shift d, considering all the charts involved in comparison. The case shown in the
figure is ARL(d = 0) = 200 and d = 0.75, 1,…,2.5.
[INSERT FIGURE 5 OVER HERE]
The DS-T2 chart has better performance than the synthetic-T2 for 1d ≤ , independently
of the sample size and the number of variables. The performance of these two charts, for
moderate and large shifts, is again very similar as the sample size increases and the
number of variables decreases.

19
Figure 6 shows the ARL curves of the optimum charts designed to have the best
performance for 0.75d = , for the case ARL(d = 0) = 200, p = 2 and n = 7 (Table 2). It
is possible to see that the ARL curve of the synthetic-T2 chart is always below the curve
of the Hotelling’s T2 chart. However, this does not happen with the curves of the
MEWMA and VSS-T2 charts. The ARL of the synthetic-T2 is lower than the ARL of
the MEWMA and VSS-T2 charts when d ≥ 0.8. The DS-T2 control chart is the chart that
has the better performance to detect simultaneously very small and large shifts. For
moderate and large shifts, the performance of the synthetic-T2 chart is similar to the DS-
T2 control chart.
[INSERT FIGURE 6 OVER HERE]
6.- Conclusions.
In this article the synthetic-T2 control chart has been developed, finding a procedure to
obtain the optimum parameters of this chart to minimize the out-of-control ARL, given
a value of in-control ARL value and a magnitude of shift in the mean vector.
It may be advisable to employ the synthetic-T2 control chart as an alternative to the
standard T2 chart, because the first one always detects faster the shifts in the mean
vector for all the values of magnitude of shift. One important property of the synthetic-
T2 chart is that a optimized chart for a given magnitude of shift always gives better
performance, for all the values of shift, than the equivalent Hotelling’s control chart.
Although its real application can be more complicated than the standard T2 chart, the
improved performance, and the possibility of continuing employing the tools for the

20
interpretation of the out-of-control signal of the Hotelling’s T2 chart, make the
utilization of the synthetic-T2 control chart an interesting one. For example, the user
interested in finding out the variables that have produced the out-of-control signal can
apply the MTY decomposition method [Mason, Tracy and Young (1997) and Mason
and Young (1999)] or the use of neural networks [Aparisi, Avendaño and Sanz (2006)].
The synthetic-T2 chart may provide good alternative to the DS-T2 chart in order to
detect moderate and large shifts in the mean vector, having the advantage of being a
chart easier to employ in the real application. For the detection of very small shifts (d =
0.25) we recommend the DS-T2. In general, for very small shifts the synthetic-T2 chart
cannot compete with the MEWMA, VSS-T2, and DSS-T2 charts, but it has a much
better performance in comparison with the Hotelling’s T2 chart. For the case of
moderate and large shifts there cases where the synthetic-T2 chart is superior that the
MEWMA or VSS-T2 charts.
Acknowledgements
This work has been supported by the Ministry of Education and Science of Spain,
research project number DPI2006-06124 including European FEDER funding, and the
support of the ITESM-Foundation Carolina agreement.
References
Aparisi, F. (1996) Hotelling's T2 control chart with adaptive sample sizes, International
Journal of Production Research, 34(10), pp. 2853-2862.

21
Aparisi, F. & Haro, C. L. (2001) Hotelling's T2 control chart with variable sampling
intervals, International Journal of Production Research, 39(14), pp. 3127-3140.
Aparisi, F. & Haro, C. L. (2003) A comparison of T2 control charts with variable
sampling schemes as opposed to MEWMA chart, International Journal of Production
Research, 41(10), pp. 2169-2182.
Aparisi, F. & García-Díaz, C. (2004) Optimization of univariate and multivariate
exponentially weighted moving-average control charts using genetic algorithms,
Computers & Operations Research, 31(9), pp. 1437-1454.
Aparisi, F., Avendaño, G. & Sanz, J. (2006) Interpreting T2 control signal: Effectiveness
of MTY decomposition vs. a neural network, IIE Transactions, 38(8), pp. 647-657.
Atienza, O. O., Tang, L. C. & Ang, B. W. (1998) Simultaneous monitoring of univariate
and multivariate SPC information using boxplots, International Journal of Quality
Science, 3(2), pp. 194-204.
Bourke, P. (1991) Detecting a shift in fraction non-conforming using run length control
chart with 100% inspection, Journal of Quality Technology, 32, pp. 225-238.
Calzada, M. & Scariano, S. (2001) The robustness of the synthetic control chart to non-
normality, Communications in Statistics: Simulation & Computation, 30(2), pp. 311-
326.
Carot, V., Jabaloyes, J. M. & Carot, T. (2002) Combined double sampling and variable
sampling interval X chart, International Journal of Production Research, 40(9), pp.
2175-2186.
Costa, A. F. B. (1994) X charts with variable sample size, Journal of Quality
Technology, 28(3), pp. 155-163.

22
Costa, A. F. B. & Rahim, M. A. (2001) Economic design of X charts with variable
parameters: The Markov chain approach, Journal of Applied Statistics, 28(7), pp. 875-
885.
Champ, C. W. (1992) Steady-state run length analysis of a Shewhart quality control
chart with supplementary runs rules, Communications in Statistics-Theory and Methods,
21(3), pp. 765-777.
Champ, C. W. & Aparisi, F. (2006) Double sampling Hotelling´s T2 charts, Quality and
Reliability Engineering International, Accepted for publication.
Champ, C. W., Jones-Farmer, L. A. & Rigdon, S. (2005) Properties of the T2 control
chart when parameters are estimated, Technometrics, 47(4), pp. 437-445.
Chen, F. L. & Huang, H. J. (2005a) A synthetic control chart for monitoring process
dispersion with sample standard deviation, Computers & Industrial Engineering, 49(2),
pp. 221-240.
Chen, F. L. & Huang, H. J. (2005b) A synthetic control chart for monitoring process
dispersion with sample range, The International Journal of Advanced Manufacturing
Technology, 26 (7-8), pp. 842-851.
Daudin, J. J. (1992) Double sampling X charts, Journal of Quality Technology, 24(2),
pp. 78-87.
Davis, R. B. & Woodall, W. H. (2002) Evaluating and improving the synthetic control
chart, Journal of Quality Technology, 34(2), pp. 200-208.
García-Díaz, J. C. & Aparisi, F. (2005) Economic design of EWMA control charts
using regions of maximum and minimum ARL, IIE Transactions, 37(11), pp.1011-
1021.
He, D. & Grigoryan, A. (2005) Multivariate multiple sampling charts, IIE Transactions,
37(6), pp. 509-521.

23
He, D. & Grigoryan A. (2006) Joint statistical design of double sampling X and S
charts, European Journal of Operational Research, 168(1), pp. 122-142.
Hotelling, H. (1947) Multivariate quality control, in: Eisenhart, C., Hastay, M.W., and
Wallis, W.A. (Eds) Techniques of Statistical Analysis, pp. 111-184 (New York:
McGraw-Hill).
Jones, L. A., Champ, C. W. & Rigdon, S. E. (2004) The run length distribution of the
CUSUM with estimated parameters, Journal of Quality Technology, 36(1), pp. 95-108.
Khoo, M. & Quah, S. (2002) Computing the percentage points of the run-length
distributions of multivariate CUSUM control charts, Quality Engineering, 15(2), pp.
299-310.
Klein, M. (1997) Modified Shewhart-exponentially weighted moving average control
charts, IIE Transactions, 29(12), pp. 1051-1056.
Knoth, S. (2005) Fast initial response features for EWMA control charts, Statistical
Papers, 46(1), pp. 47-64.
Kourti, T. & Macgregor, J. F. (2004) Multivariate statistical process control and
industrial applications, Quality Congress. ASQ World Conference on Quality and
Improvement Proceedings, 58, pp. 449-452.
Lowry, C. A. & Montgomery, D. C. (1995) A review of multivariate control chart, IIE
transactions, 27(6), pp. 800-810.
Lowry, C. A., Woodall, W. H., Champ, C. W. & Rigdon, S.E. (1992) A multivariate
exponentially weightes moving average control chart, Technometrics, 34, pp. 46-53.
Lucas, J. M. (1982) Combined Shewhart-CUSUM quality control schemes, Journal of
Quality Technology, 14(2), pp. 51-59.

24
Lucas, J. S. & Saccucci, M. S. (1990) Exponentially weighted moving average control
schemes: properties and enhancements, Technometrics, 32(1), pp. 1-12.
Luceno, A. & Puig-Pey, J. (2000) Evaluation of the run-length probability distribution
for CUSUM charts: assessing chart performance, Technometrics, 42(4), pp. 411-416.
Mason, R. L., Tracy, N. D. & Young, J. C. (1997) A practical approach for interpreting
multivariate T2 control chart signals, Journal of Quality Technology, 29(4), pp. 396-
406.
Mason, R. L. & Young, J. C. (1999) Improving the sensitivity of the T2 statistic in
multivariate process control, Journal of Quality Technology, 31(2), pp. 155-165.
Montgomery, D. C. (2005) Introduction to statistical quality control, fifth edition (New
York: John Wiley & Sons.).
Prabhu, S. S. & Runger, G. C. (1997) Designing a multivariate EWMA control chart,
Journal of Quality Technology, 29(1), pp. 8-15.
Reynolds, Jr., M. R. & Arnold, J. C. (2001) EWMA control charts with variable sample
sizes and variable sampling intervals, IIE Transactions, 33(6), pp. 511-530.
Scariano, S. & Calzada, M. (2003) A note on the lower-sided synthetic chart for
exponentials, Quality Engineering, 15(4), pp. 677-680.
Vargas, J. A. (2003) Robust estimation in multivariate control charts for individual
observations, Journal of Quality Technology, 35(4), pp. 367-376.
Williams, J. D., Woodall, W. H., Birch, J. B. & Sullivan, J. H. (2006) Distribution of
Hotelling's T2 statistic based on the successive differences estimator, Journal of Quality
Technology, 38(3), pp. 217-229.
Woodall, W. H. (1985) The statistical design of quality control charts, The Statistician,
34, pp. 155-160

25
Woodall, W. H. & Ncube, M. M. (1985) Multivariate CUSUM quality-control
procedures, Technometrics, 27(3), pp. 285-292.
Wu ,Z. & Spedding, T. A. (2000) A synthetic control chart for detecting small shifts in
the process mean, Journal of Quality Technology, 32(1), pp. 32-38
Wu, Z., Yeo, S. H. & Spedding, T. A. (2001) A synthetic control chart for detecting
fraction nonconforming increases, Journal of Quality Technology, 33(1), pp. 104-111.
Zhang, S. & Wu, Z. (2005) Designs of control charts with supplementary runs rules,
Computers & Industrial Engineering, 49(1), pp. 76-97.

26
Figure 1. Sub-charts of the synthetic-T2 Control chart: T2 sub-chart and CRL sub-chart.
Figure 2. Values of CRL between two non-conforming samples.
conforming sample
nonconforming sample
In-control state
T2 sub-chart
L
CR
LSignal out of control
CRL sub-chart
LCsynt
0t
t1
t = 0
Conforming sample Nonconforming sample
CRL1 = 5CRL2 = 4
CRL3 = 7CRL4 = 6

27
Figure 3. Main window of the developed software to find the optimum synthetic-T2 and synthetic- X control
charts.
Figure 4. ARL of the optimum synthetic-T2 chart for a shift d. ( 0) 200S TARL d− = = , p = 2.
n = 1
n = 2
n = 3
n = 5n = 7

28
Figure 5. ARL of the optimum multivariate control charts for a given magnitude of shift d. ARL(d = 0) = 200.
Figure 6. ARL curves of the optimum control charts for a shift 0.75d = . ARL(d = 0) = 200, p = 2, n = 7.

29
T2 Synthetic-T2 MEWMA VSS-T2 DS-T2
(CL) ( LCsynt, L ) ( h, r ) ( CL, w, n1, n2 ) ( h, h1, w1, n1, n2 )d n1+n2 <= 20 n1+n2 <= 20
200 200 200 200 20010.5966148.34 129.27 41.75 138.28 16.11
(8.942,50) (7.372,0.05) (10.597, 5.75,1,19) (11.25,19.16,1.39,1,2)76.86 51.37 17.03 39.95 21.36
(8.499,30) ( 9.067,0.13) (10.597,5.78,1,19) (6.00,13.96,5,73,1,18)37.01 19.88 9.24 12.55 9.48
(7.987,17) ( 9.366,0.16) (10.597,5.41,1,16) (6.69,14.77,5.11,1,3)18.48 8.80 6.03 6.22 5.79
(7.496,10) (9.95,0.26) (10.597,4.39,1,10) (9.59,11.27,4.71,1,11)9.91 4.59 4.34 3.93 3.62
(7.161,7) ( 10.28,0.38) (10.597, 3.89,1,8) (9.87,12.62,3.20,1,5)5.76 2.79 3.27 2.86 2.64
(6.842,5) (10.36, 0.43) (10.597,3.22,1,6) (9.45,11.58,4.34,1,9)3.65 1.93 2.61 2.28 1.96
(6.630,4) (10.51,0.59) (10.597,2.77,1,5) (11.27,11.12,3.83,1,7)2.51 1.49 2.10 1.92 1.50
(6.355,3) (10.5485,0.67) (10.597,2.20,1,4) (13.25,11.01,2,74,1,4)1.87 1.26 1.73 1.68 1.26
(5.966,2) (10.57,0.74) (10.597,1.39,1,3) (13.59,10.95,2.74,1,4)1.50 1.13 1.47 1.49 1.20
(5.966,2) (10.58, 0.79) (10.597,1.39,1,3) (14.12,10.82,3.18,1,5)
2
2.25
2.5
1
1.25
1.5
1.75
0
0.25
0.5
0.75
Table 1. ARL of the optimum multivariate control charts for a shift d. ARL(d = 0) = 200, p = 2, n = 2.
T2 Synthetic-T2 MEWMA VSS-T2 DS-T2
(CL) ( LCsynt, L ) ( h, r ) ( CL, w, n1, n2 ) ( h, h1, w1, n1, n2 )d n1+n2 <= 20 n1+n2 <= 20
200 200 200 200 20010.596684.35 58.32 18.27 66.17 10.36
(8.556,32) (8.471, 0.09) (10.597, 2.20,1,19) (12.02,11.90,0.56,1,8)21.98 10.70 6.65 9.06 7.81
(7.666,12) (9.769,0.22) (10.597,2.19,1,19) (9.73,15.27,2.92,4,13)7.04 3.33 3.62 3.30 2.85
(6.842,5) (10.195,0.34) (10.597,2.33,2,18) (10.19,11.88,5.07,6,13)3.02 1.68 2.36 2.10 1.52
(6.355,3) (10.41,0.47) ( 10.597,3.01,5,14) (9.63,14.34,4.59,6,10)1.72 1.20 1.63 1.54 1.18
(5.966,2) (10.57,0.74) (10.597,3.89,6,13) (10.89,12.36,2.58,4,11)1.24 1.05 1.25 1.25 1.04
( 5.966,2) (10.59,0.87) (10.597,0.00,6,7) (10.25,15.36,3.88,6,7)1.07 1.01 1.08 1.08 1.02
(5.966,2) (10.594,0.91) (10.597,1.39,6,8) (17.94,10.63,5.15,6,14)1.02 1.00 1.02 1.03 1.00
(5.966,2) (10.59,0.86) (10.597,3.22,6,11) (15.23,10.75,3.53,5,12)1.00 1.00 1.00 1.01 1.00
(5.966,2) (10.59,0.90)) (10.597,2.20,6,9) (12.56,11.33,2.74,5,8)1.00 1.00 1.00 1.00 1.00
(5.966,2) (10.59,1.00) (10.597,3.89,6,13) (13.54,10.94,3.04,4,14)
2
2.25
2.5
1
1.25
1.5
1.75
0
0.25
0.5
0.75
Table 2. ARL of the optimum multivariate control charts for a shift d. ARL(d = 0) = 200, p = 2, n = 7.

30
T2 Synthetic-T2 MEWMA VSS-T2 DS-T2
(CL) ( LCsynt, L ) ( h, r ) ( CL, w, n1, n2 ) ( h, h1, w1, n1, n2 )d n1+n2 <= 20 n1+n2 <= 20
200 200 200 200 20016.7496168.96 155.51 52.82 164.11 7.28
(14.719,48) (13.44,0.06) (16.750,10.79,1,19) (18.85,17.33,0.04,1,1,)109.20 82.58 20.96 66.17 31.07
(14.386,35) (14.1, 0.08) (16.750,10.62,1,19) (10.17,27.13,10.94,1,19)61.43 37.53 11.69 20.27 15.13
(13.928,23) (15.31,0.15) (16.750,10.79,1,19) (12.43,20.15,9.68,1,12)33.11 17.15 7.58 9.46 7.61
(13.448,15) (15.87,0.22) (16.750,9.73,1,13) (12.80,24.26,8.62,1,8)18.07 8.53 5.38 5.52 5.07
(12.980,10) (16.19,0.29) (16.750, 8.62,1,9) (13.73,18.84,9.18,1,10)10.28 4.75 4.07 3.78 3.22
(12.561,7) (16.366,0.35) ( 16.750, 7.82,1,7) (14.26,22.20,7.80,1,6)6.20 2.97 3.22 2.87 2.61
(12.159,5) (16.51,0.42) (16.750, 7.28,1,6) (16.99,17.66,7.76,1,6)3.99 2.07 2.63 2.37 2.06
(11.890,4) (16.609,0.51) (16.750,5.73,1,4) (14.60,19.25,8.22,1,7)2.76 1.59 2.18 2.08 1.47
( 11.538,3) (16.661, 0.58) ( 16.750,4.35,1,3) (18.81,17.69,5.69,1,3)2.04 1.32 1.82 1.74 1.22
(11.538,3) (16.734,0.79) (16.750,4.35,1,3) (22.96,16.92,5.69,1,3)2.5
2
2.25
1.5
1.75
1
1.25
0.5
0.75
0.25
0
Table 3. ARL of the optimum multivariate control charts for a shift d. ARL(d = 0) = 200, p = 5, n = 2.
T2 Synthetic-T2 MEWMA VSS-T2 DS-T2
(CL) ( LCsynt, L ) ( h, r ) ( CL, w, n1, n2 ) ( h, h1, w1, n1, n2 )d n1+n2 <= 20 n1+n2 <= 20
200 200 200 200 20016.7496116.74 90.81 23.00 101.11 6.36
(14.445,37) (13.8,0.07) (16.750,5.73,1,19) (15.95,28.51,0.02,1,6)38.86 20.87 8.38 16.81 14.47
(13.590,17) (15.745,0.20) (16.750,5.73,1,19) (15.63,20.23,8.02,5,13)12.71 5.88 4.51 4.51 3.95
(12.719,8) (16.34,0.34) ( 16.750, 5.73,1,19) (15.24,23.07,8.24,5,14)4.97 2.47 2.92 2.62 1.95
(11.890,4) (16.618,0.52) (16.750,5.73,2,17) (15.23,20.11,8.43,5,15)2.46 1.48 2.04 1.86 1.39
(11.538,3) (16.7,0.66) (16.750,6.98,5,14) (16.08,28.52,7.08,4,14)1.55 1.14 1.52 1.44 1.10
(11.037,2) (16.71,0.69) (16.750,7.29,6,11) (16.77,20.13,6.61,5,8)1.19 1.04 1.22 1.19 1.02
(11.037,2) (16.72,0.73) (16.750,0.00,6,7) (23.39,16.90,5.69,5,6)1.05 1.01 1.06 1.05 1.01
(11.037,2) (16.75, 0.91) (16.750,0.00,6,7) (18.46,17.57,7.51,5,11)1.01 1.00 1.01 1.01 1.00
(11.037,2) (16.75,0.97) (16.750,0.00,6,7) (17.44,18.17,0.49,3,4)1.00 1.00 1.00 1.00 1.00
(11.037,2) (16.75,0.92) (16.750,0.00,6,7) (23.53,16.93,5.10,5,5)2.5
2
2.25
1.5
1.75
1
1.25
0.25
0.5
0.75
0
Table 4. ARL of the optimum multivariate control charts for a shift d. ARL(d = 0) = 200, p = 5, n = 7.

31
T2 Synthetic-T2 MEWMA VSS-T2 DS-T2
(CL) ( LCsynt, L ) ( h, r ) ( CL, w, n1, n2 ) ( h, h1, w1, n1, n2 )d n1+n2 <= 20 n1+n2 <= 20
200 200 200 200 20025.1882179.24 169.43 64.15 176.60
(22.688,45) (17.214,0.02) ( 25.188,17.96,1,19)132.28 108.01 26.58 92.58 42.16
(22.439,37) (21.8,0.07) (25.188,17.50,1,19) (17.21,35.76,18.05,1,19)85.15 57.75 14.73 31.84 19.76
( 22.029,27) (22.71, 0.1) (25.188,17.95,1,19) (17.71,29.98,18.08,1,19)50.78 28.94 9.43 13.54 10.84
(21.557,19) (23.81,0.17) ( 25.188,17.37,1,16) (19.77,48.54,15.98,1,10)29.43 14.72 6.68 7.63 7.11
(21.034,13) ( 24.09, 0.2) (25.188,15.99,1,11) (20.80,27.54,16.56,1,12)17.14 7.98 5.01 4.97 4.39
(20.513,9) (24.754, 0.34) (25.188,14.72,1,8) (20.87,32.66,15.22,1,8)10.27 4.71 3.91 3.62 3.53
(20.150,7) ( 24.8725,0.39) (25.188,13.44,1,6) (20.19,42.64,15.61,1,9)6.42 3.05 3.19 2.84 2.40
(19.657,5) (25.022,0.49) (25.188,12.55,1,5) (22.86,30.76,13.43,1,5)4.23 2.16 2.65 2.35 1.93
(19.324,4) (25.052,0.52) (25.188,12.55,1,5) (23.88,27.88,13.40,1,5)2.96 1.66 2.30 2.01 1.45
(18.890,3) (25.17,0.77) (25.188,11.32,1,4) (25.64,27.62,11.29,1,3)
2
2.25
2.5
1
1.25
1.5
1.75
0
0.25
0.5
0.75
Table 5. ARL of the optimum multivariate control charts for a shift d. ARL(0) = 200, p = 10, n = 2.
T2 Synthetic-T2 MEWMA VSS-T2 DS-T2
(CL) ( LCsynt, L ) ( h, r ) ( CL, w, n1, n2 ) ( h, h1, w1, n1, n2 )d n1+n2 <= 20 n1+n2 <= 20
200 200 200 200 20025.1882138.83 115.91 29.36 127.60 6.91
(22.474,38) (20.80,0.05) (25.188,11.32,1,19) (25.96,29.05,0.04,2,5)58.29 34.63 10.54 31.97 24.52
(21.693,21) (23.296,0.13) (25.188,11.60,2,18) (23.55,33.55,15.61,6,9)21.09 10.03 5.58 7.05 7.59
(20.799,11) (24.294,0.23) (25.188,11.60,2,18) (26.27,26.16,16.18,6,11)8.13 3.77 3.70 3.34 2.94
(19.925,6) ( 24.48, 0.26) ( 25.188,11.67,3,16) (25.93,26.88,12.50,4,12)3.70 1.95 2.49 2.21 1.77
(19.324,4) (25.1, 0.58) (25.188,12.19,4,15) (25.86,26.56,12.33,3,15)2.07 1.33 1.82 1.70 1.22
(18.890,3) (25.17,0.77) ( 25.188,14.14,6,12) (37.27,25.24,13.34,5,10)1.41 1.10 1.39 1.37 1.12
(18.266,2) (25.17,0.78) (25.188,14.14,6,12) (21.79,31.32,17.11,6,14)1.14 1.03 1.14 1.14 1.05
(18.266,2) (25.18,0.85) (25.188,0.00,6,7) (23.91,27.78,14.91,5,15)1.04 1.00 1.04 1.04 1.01
(18.266,2) (25.19,0.97) (25.188,0.00,6,7) (26.24,26.58,13.74,5,11)1.01 1.00 1.01 1.01 1.00
(18.266,2) (25.187,0.94) (25.188,0.00,6,7) (26.49,28.28,0.14,3,4)
2
2.25
2.5
1
1.25
1.5
1.75
0
0.25
0.5
0.75
Table 6. ARL of the optimum multivariate control charts for a shift d. ARL(d = 0) = 200, p = 10, n = 7.