Embed Size (px)
Citation preview

1-1
TEMA 1
TÉCNICAS DE PROCESADO DE SEÑAL EN LAS MODULACIONES
ANALÓGICAS Inmaculada Hernáez Rioja

1-1
TEMA 1 Técnicas de procesado de señal en las modulaciones analógicas...................................... 1-2 1.1 Representación de señales paso – banda................................................................................................... 1-2 1.2 Demodulación de señales AM por detección de envolvente. ................................................................ 1-5
1.2.1 Descripción de señales AM..................................................................................................................... 1-5 1.2.2 Demodulación cuadrática de señales AM............................................................................................. 1-5
1.3 Modulación en doble banda lateral y detección coherente..................................................................... 1-6 1.3.1 Descripción de la señal DSB .................................................................................................................. 1-6 1.3.2 Receptor coherente ideal. ........................................................................................................................ 1-6
1.4 Lazos enganchados en fase. (PLL’s) .......................................................................................................... 1-7 1.4.1 Descripción general del funcionamiento de un PLL .......................................................................... 1-7 1.4.2 Modelo del PLL en condiciones de enganche ..................................................................................... 1-9 1.4.3 Análisis en régimen permanente ..........................................................................................................1-10 1.4.4 Detección FM .........................................................................................................................................1-18 1.4.5 El lazo de Costas ....................................................................................................................................1-18
1.5 ejercicios .......................................................................................................................................................1-23 1.5.1 Problema 1...............................................................................................................................................1-23 1.5.2 Problema 2...............................................................................................................................................1-23 1.5.3 Problema 3...............................................................................................................................................1-23 1.5.4 Problema 5...............................................................................................................................................1-23
1.6 Bibliografía ...................................................................................................................................................1-25

1-2
TEMA 1 TÉCNICAS DE PROCESADO DE SEÑAL EN LAS MODULACIONES ANALÓGICAS
1.1 REPRESENTACIÓN DE SEÑALES PASO – BANDA
En este apartado repasaremos conceptos básicos de las comunicaciones paso-banda.
Transformada Hilbert de una señal x(t):
( ) ( ) ( ) ττ
τππ
dt
xt
txtx ⋅−
⋅=⋅
∗= ∫∞
∞−
111ˆ h(t)
)(tx )(ˆ txh(t)
)(tx )(ˆ tx
( )t
th⋅
=π
1
Se puede demostrar que: ( ) ( )0000
sign j<=>−
=⋅−==ωωω
ωωj
jHthF
Por tanto el transformador de Hilbert es un filtro desfasador de 90º ideal. En el dominio de la frecuencia:
( )ωH
j
-j
ω
2π−
2π
( )ωφ
ω
En el dominio de la frecuencia:
( ) ( ) ( ) ( ) ( )ωωωωω XsignjXHX ⋅−=⋅= ˆ
Un par de transformadas muy útil:

1-3
)sin()2
cos()cos( 000 ttt H ⋅=−⋅⎯→←⋅ ωπωω
)cos()sin( 00 tt H ⋅−⎯→←⋅ ωω
( ) ( )φωφω +⎯→←+ tt H00 sin cos
Si m(t) es una señal paso bajo con frecuencia de corte ω1 y c(t) es una señal paso alto con frecuencia de corte inferior ω2>ω1:
( ) ( ) ( ) ( )tctmtctm H ˆ ⋅⎯→←⋅
Señal analítica o pre-envolvente asociada a x(t)
( ) ( ) ( )txjtxtx ˆ⋅+=+
Por ejemplo:
( )( ) tj cetjttx
ttxωωω
ω
=⋅+=
=+ )( sin)cos(
)cos(
cc
c
Otro ejemplo: sea m(t) una señal paso bajo con frecuencia de corte ω<ωc, ( ) ( )( ) ( ) ( ) ( ) tj
c cetmttmjttmtx
ttmtxωωω
ω
⋅=⋅⋅+⋅=
⋅=+ )sin()cos(
)( cos
c
c
En general se puede demostrar que: ( ) ( ) ( ) ( )00000)(2
2<=>
=⋅⋅=+
ωωωω
ωωω XX
uXX
ωc−ωc
ωc
( )ωX
( )ω+X
ω
ω
X(0)
2X(0)
ωc−ωc
ωc
( )ωX
( )ω+X
ω
ω
X(0)
2X(0)
Envolvente compleja de x(t)

1-4
Se define siempre con respecto a una frecuencia portadora ωc: ( ) ( ) tj cetxtx ω−+ ⋅=~
y su transformada de Fourier es: ( ) ( ) ( ) ( )ccc uXXX ωωωωωωω +⋅+⋅=+= + 2~
La envolvente compleja se define por tanto para señales paso-banda, , y la frecuencia portadora ωc se encuentra normalmente en la banda de paso de la señal paso-banda x(t). Por eso, ( )tx~ es una señal paso-bajo, también llamada EQUIVALENTE PASO-BAJO.
Desarrollando:
( ) ( ) ( )[ ] tj cetxjtxtx ω−⋅+= ˆ~
( ) ( ) ( ) ttxttxtxe cc ωω sinˆcos~ ⋅+⋅=ℜ ( ) faseen Componente →= txF
( ) ( ) ( ) ttxttxtxm cc ωω sincosˆ~ ⋅−⋅=ℑ ( ) cuadraturaen Componente→= txc
( ) ( ) ( )txjtxtx cF ⋅+=~
y también: ( ) ( ) ( ) ( ) ( )( ) tjCF
tj cc etxjtxeetxetxetx ωω ⋅⋅+ℜ=⋅ℜ=ℜ= + ~
( ) ( ) ( ) ttxttxtx cCcF ωω sincos ⋅−⋅=
Envolvente real de x(t)
Se define como:
( ) ( ) ( ) ( )txtxtxte CF22~ +==
También: ( ) ( ) ( ) ( )txtxtxte 22 ˆ+== +
Fase instantánea de x(t):
( ) ( ) ( )( )txtx
arctgtxtF
c== ~pθ
y así ))(cos()()( tttetx c θω +=
Nótese que:
( )txtx ˆ ),( son señales paso-banda.
( ) ( ) ( ) ( ) ( )ttetxtxtx CF θy,,,~ son todas ellas señales paso-bajo.
( ) ( ) ( ) ( )ttetxtxtxtx CF θ,,,),(ˆ),( son señales reales.
y ))(cos()()( tttetx c θω +=

1-5
1.2 DEMODULACIÓN DE SEÑALES AM POR DETECCIÓN DE ENVOLVENTE.
En este apartado vemos dos técnicas sencillas para la demodulación de señales AM, de fácil implementación en el dominio discreto.
1.2.1 DESCRIPCIÓN DE SEÑALES AM
Una señal AM tiene la expresión: ( ) ( )( ) ttmkAts cac ωcos1 ⋅⋅+= , en donde ( ) cos tAtc cc ω⋅= es la
portadora y )(tm es el mensaje, con frecuencia máxima W. La frecuencia portadora cf debería ser mayor que
la máxima frecuencia contenida en )(tm W. ak es la sensibilidad del modulador (índice de modulación) y es una constante positiva.
La envolvente de )(ts : ( ) ( )tmkAte ac ⋅+= 1
En AM estándar, ( ) ttmka ∀≥+ 01 y por tanto ( ) ( )[ ]tmkAte ac +⋅= 1 de forma que )(tm puede ser recuperada a partir de la envolvente, con un factor de escala y tras eliminar la componente continua.
El espectro de la señal modulada en AM:
( ) ( ) ( ) ( ) ( )cac
cac
cccc MkAMkAAAS ωωωωωωδπωωδπω −⋅++⋅+−⋅++⋅=22
π⋅cA
)(2 caC MkA ωω −⋅⋅
cω ωcω−
)(ωSπ⋅cA
)(2 caC MkA ωω −⋅⋅
cω ωcω−
)(ωS
1.2.2 DEMODULACIÓN CUADRÁTICA DE SEÑALES AM.
El esquema de un demodulador de este tipo es:
( · )2 H(ω)LPF
s(t) y(t)( )( · )2 H(ω)LPF
s(t) y(t)( )
( ) ( )[ ] ( )[ ]
( )[ ] ( )[ ] ttmkAtmkA
ttmkAttmkAts
cacac
caccac
ω
ωω
2cos1211
21
cos1cos12222
22222
⋅+++=
⋅+⋅=⋅⋅+=
El término ( )[ ]21221 tmakcA + es paso bajo, y su frecuencia de corte será el doble de la frecuencia máxima
contenida en )(tm W. El segundo término es paso banda y está centrado en cω2± . Para que el detector funcione correctamente, los dos espectros no se deben solapar:
1-6
WWW cc 2222 >⇒−< ωω
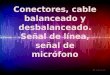
Demodulación utilizando la envolvente compleja.
Otro método para detectar la señal es utilizando un transformador de Hilbert.
s(t) e(t)t⋅π
1 ( )2
( )2+ ( )s(t) e(t)
t⋅π1 ( )2
( )2
( )2( )2
( )2( )2+ ( )++ ( )( )
1.3 MODULACIÓN EN DOBLE BANDA LATERAL Y DETECCIÓN
COHERENTE
La señal modulada en AM contiene una componente sinusoidal en la frecuencia portadora que no contiene información. Esta componente se introduce para crear una envolvente positiva que permite una demodulación sencilla. Desde el punto de vista de la teoría de la información esta componente se desperdicia.
La transmisión de la portadora no es necesaria si se utiliza un demodulador coherente. Además, de esta forma obtendremos un mejor comportamiento frente al ruido.
Esta modulación se suele llamar DSB-SC-AM (Double Side Band Supressed Carrier Amplitude Modulation), o también simplemente DSB (Double Side Band, Doble Banda Lateral).
1.3.1 DESCRIPCIÓN DE LA SEÑAL DSB
La señal DSB puede expresarse:
( ) ( ) ttmAts cc ωcos⋅⋅=
es decir, como la señal AM con la portadora suprimida.
Su espectro: ( ) ( ) ( )cccc MAMAS ωωωωω +⋅+−⋅=21
21
se supone que m(t) tiene un ancho de banda W y que ωc>W y que los espectros M(ω−ωc)y M(ω+ωc)no se solapan. Si se solaparan no se puede realizar la demodulación.
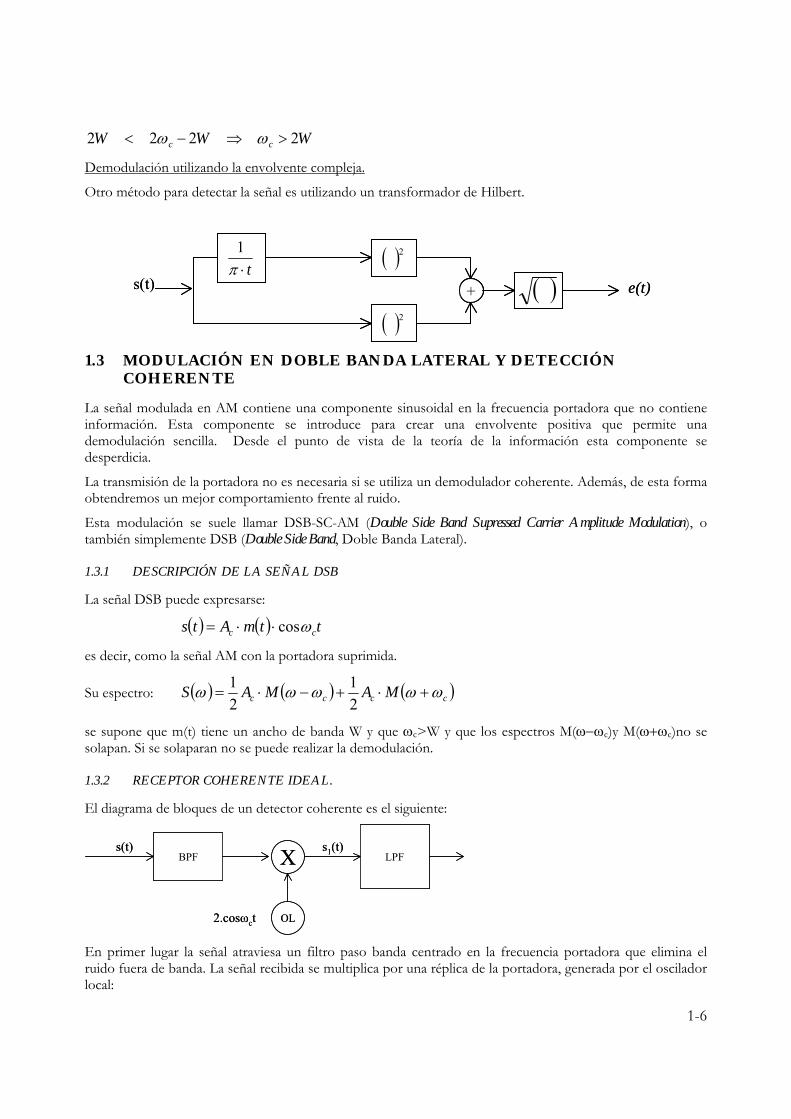
1.3.2 RECEPTOR COHERENTE IDEAL.
El diagrama de bloques de un detector coherente es el siguiente:
BPF LPFs1(t)
2.cosωct
X
OL
s(t)BPF LPF
s1(t)
2.cosωct
X
OL
s(t)
En primer lugar la señal atraviesa un filtro paso banda centrado en la frecuencia portadora que elimina el ruido fuera de banda. La señal recibida se multiplica por una réplica de la portadora, generada por el oscilador local:

1-7
( ) ttmAtmAttmtt cccc ωωω 2cos)()(cos2)(Acos2s(t)s 2cc1 ⋅⋅+⋅=⋅⋅⋅=⋅⋅=
El elemento que lleva a cabo la demodulación es un MODULADOR DE PRODUCTO o MEZCLADOR.
El espectro de s1(t) es: ( ) ( ) ( ) ( )ccccc MAMAMAS ωωωωωω 2212
21
1 ++−⋅+⋅=
Los términos centrados en 2ωc pueden ser eliminados mediante un filtro paso bajo.
Un método alternativo para realizar la detección es formar la señal analítica:
( ) ( ) ( ) ( ) ( ) ( ) tjccccc
cetmAtsentmjAttmAtsjtsts ωωω ⋅⋅=⋅⋅+⋅⋅=+=+ cosˆ
y para recuperar m(t) basta con multiplicar por tje cω−
( ) ( ) ( )tmAetsts ctj c =⋅= −+ ω
Para poder utilizar este receptor, es necesario conocer la frecuencia y fase de la portadora.
1.4 LAZOS ENGANCHADOS EN FASE. (PLL’S)
Para llevar a cabo la demodulación de la señal DSB, el receptor debe tener un conocimiento exacto de la frecuencia y la fase de la portadora y esto no suele ocurrir. Sin embargo estos parámetros pueden ser estimados de forma muy precisa en el receptor por dispositivos llamados PLL’s. (lazos de enganche de fase, Phase Locked Loops), de forma que es posible realizar detección coherente casi óptima. El Lazo de Costas es un tipo particular de PLL que estudiaremos más adelante.
1.4.1 DESCRIPCIÓN GENERAL DEL FUNCIONAMIENTO DE UN PLL
Un PLL tiene 3 componentes básicos: un detector de fase, un filtro paso bajo y un VCO.
Detector defase
LPFF(f)
v0(t)
VCOv0(t)
vin(t) v1(t) v2(t)Detector defase
LPFF(f)
v0(t)
VCOv0(t)
vin(t) v1(t) v2(t)
El VCO es un oscilador (Voltaje Controlled Oscilator) que produce una señal periódica cuya frecuencia puede variar alrededor de una cierta frecuencia f0, proporcionalmente a la tensión aplicada externamente v2(t). La frecuencia f0 es la frecuencia de libre oscilación del VCO, a la que oscila cuando v2(t) =0. Cuando el lazo está enganchado a una señal periódica de entrada, el VCO oscila exactamente a la frecuencia de dicha señal de entrada.
Cuando el PLL está enganchado (es decir, en funcionamiento estable), el detector de fase genera una señal v1(t) de muy baja frecuencia, con una frecuencia que es función de la diferencia de fases entre las señales de entrada al sistema vin(t) y de salida del VCO v0(t). Un detector de fases común está formado por un multiplicador. Esta señal atraviesa el filtro F(f) y se aplica a la entrada del VCO. Si la frecuencia de la señal de entrada empieza a aumentar ligeramente, la diferencia de fases entre la señal del VCO y la de entrada comenzará a crecer. Se producirá un cambio en la frecuencia de control del VCO de tal forma que se lleve al VCO a oscilar hacia la misma frecuencia de la señal de entrada. Por tanto, el lazo se mantiene enganchado a la

1-8
frecuencia de entrada. La tensión de control del VCO será proporcional a la frecuencia de la señal de entrada, por lo que esta configuración es útil en la demodulación de señales FM. El rango de frecuencias para el cual el lazo es capaz de mantenerse enganchado (es decir, es capaz de seguir la frecuencia de la señal de entrada) se conoce como Margen de enganche. En apartados siguientes estudiaremos con más detalle el funcionamiento del PLL en condiciones de enganche.
En el proceso de captura, el lazo pasa de una situación de no enganche, en la que el VCO se encuentra oscilando a la frecuencia de libre oscilación f0, a engancharse a la frecuencia de la entrada. Cuando se aplica a la entrada del PLL una señal oscilando a una frecuencia próxima a la frecuencia f0 el enganche puede producirse, o no, dependiendo de ciertas condiciones. El proceso de captura es de naturaleza no lineal, y se explicará de forma cualitativa.
Supongamos que el lazo está abierto entre el filtro y el VCO, y que se aplica a la entrada una señal periódica de frecuencia próxima (pero no igual) a f0. La salida del detector de fase será una senoide de frecuencia la diferencia de ambas frecuencias, y la misma señal tendremos a la salida del filtro paso bajo (v2(t)), con la correspondiente ganancia. Si cerramos bruscamente el lazo, y aplicamos v2(t) a la entrada del VCO, la frecuencia de v0(t) variará sinusoidalmente, alrededor de f0 con v0(t) encontrándose alternativamente más próxima y más alejada de la frecuencia de entrada. La salida del detector de fase, será una ‘cuasi-sinusoide’ cuya frecuencia es la diferencia entre la del VCO y la de entrada. Cuando la frecuencia del VCO se aleja de la de entrada, la frecuencia de la sinusoide aumenta. Cuando la frecuencia del VCO se acerca a la de entrada, disminuye. La forma presente a la salida del detector de fase se muestra en la figura siguiente.
Como puede observarse, se produce una asimetría durante este proceso de captura, que introduce una componente continua que desplazará la frecuencia media de salida del VCO hacia la frecuencia de entrada, haciendo disminuir gradualmente la diferencia entre ambas. Una vez que el sistema se engancha, la diferencia de frecuencias se hace cero, y únicamente tendremos una señal continua a la salida del filtro (debida a la diferencia de fases entre las señales de entrada al PLL y de salida del VCO).
El rango de captura del lazo es el rango de frecuencias de entrada alrededor de la frecuencia central para el cual el lazo se enganchará partiendo de una situación de no enganche. El tiempo de captura es el tiempo requerido para realizar la captura. Ambos parámetros dependen de la ganancia del lazo y del ancho de banda del filtro.
El objetivo del filtro es eliminar componentes interferentes resultantes del proceso de detección de fase. También proporciona memoria al lazo cuando se pierde momentáneamente el enganche debido a un transitorio interferente. La reducción del ancho de banda del filtro mejora por tanto el rechazo a las señales fuera de banda, pero al mismo tiempo decrementa el rango de captura y aumenta el tiempo de captura.

1-9
1.4.2 MODELO DEL PLL EN CONDICIONES DE ENGANCHE
La característica del módulo de detección de fase depende de la implementación realizada. Algunas características típicas son:
a) Sinusoidal b) Triangular c) diente de sierra
πσe σe
πσe
vp vp vp
π σe
a) Sinusoidal b) Triangular c) diente de sierra
πσe σe
a) Sinusoidal b) Triangular c) diente de sierra
πσe σe
πσe
vp vp vp
π σe
La característica sinusoidal se obtiene mediante circuitos analógicos utilizando un multiplicador (APLL). Las características triangulares y en diente de sierra se obtienen mediante circuitos digitales (DPLL). Para el estudio del PLL en condiciones de enganche utilizaremos un detector de fase consistente en un multiplicador.
LPFF(f)
v0(t)
VCOv0(t)
vin(t) v1(t) v2(t)X LPFF(f)
v0(t)
VCOv0(t)
vin(t) v1(t) v2(t)X
Si la señal de entrada es ( ) ( )[ ]ttsenAtv ioiin σω +⋅= y la salida del VCO es ( ) ( )[ ]ttAtv oooo σω +⋅= cos
en donde ( ) ( )∫ ∞−⋅=
t
v dvKt ττσ 2o .
Kv es la ganancia de VCO y se mide en rad/v ·seg, o Hz/v.
La salida del detector de fase (multiplicador):
( ) ( )[ ] ( )[ ]
( ) ( )[ ] ( ) ( )[ ]tttsenAAKttsenAAK
ttttsenAAKtv
oiooi
moioi
m
ooiooim
σσωσσ
σωσω
++⋅⋅
+−⋅⋅
⋅=
=+⋅+⋅⋅⋅=
222
cos1
Km es la ganancia del multiplicador.
El termino en 2·ω0 t no atravesará el filtro paso bajo, así que la salida del filtro será:
( ) ( ) ( )[ ] ( )tfttsenAAKmtv oioi ∗
⎭⎬⎫
⎩⎨⎧ −⋅
⋅⋅= σσ
22
siendo f(t) la respuesta al impulso del filtro. Podemos escribir:
( ) ( ) ( )ttt
AAKK
eoi
oimd
σσσ =−
⋅⋅=
2
y ( ) ( ) ( )tftsenKtv ed ∗⋅= σ2
σe(t) se llama el Error de Fase. La diferencia entre las fases instantáneas de las señales de entrada y salida será
de 2
)( πσ −te ya que la fase instantánea de la señal de entrada es 2
)()( πσφ −= tt ii .

1-10
Kd es la constante equivalente del detector de fase que para este tipo de detector depende de las amplitudes de las señales de entrada además del propio detector.
Buscamos la relación entre las fases de entrada y salida σi(t) y σo(t). La ecuación que describe el comportamiento del PLL es:
( ) ( ) ( ) ( )∫ ∞−⋅=→⋅⋅=
t
vo
vo tvKdt
tddvKt 22σττσ
( ) ( ) ( )totite σσσ −=
( ) ( ) ( )tvKdt
tddt
tdv
ie2⋅−=
σσ
( ) ( ) ( )tvKtt vie 2⋅−=ωω
( ) ( ) ( ) ( ) tftsenKKdt
tddt
tdedv
ie ∗⋅⋅−= σσσ
( ) ( ) ( ) ( )tftsenKKtt edvie ∗⋅⋅−= σωω
Si el error de fase es pequeño (condición de lazo enganchado), ( )tesenσ ~ ( )teσ y:
( ) ( ) ( ) ( ) tftKvKddt
tdtde
ie ∗⋅⋅−= σσσ
dt
( ) ( ) ( ) ( )[ ]∫ ∞−⋅∗⋅−=
t
evdie dfKKtt τττσσσ
y esta ecuación se corresponde con el sistema:
+ f(t)Kd
)(tiσ
)(toσ
)(teσ
+_
fjKfF v
π2)(2 =
+ f(t)Kd
)(tiσ
)(toσ
)(teσ
+_
fjKfF v
π2)(2 =
Este es el modelo lineal del PLL, válido únicamente cuando el PLL está enganchado. En este modelo la entrada al sistema es la fase instantánea de la señal (+π/2) y se utiliza la fase instantánea de salida del VCO.
1.4.3 ANÁLISIS EN RÉGIMEN PERMANENTE
En este apartado estudiamos el comportamiento en frecuencia del PLL en estado de enganche, considerando como entrada y salida las señales de σi(t) y σ0(t), y el modelo lineal anteriormente hallado. Partiendo de dicho modelo, y trabando con la transformada de Laplace:
( ) ( )[ ] ( ) ( )ss
KsFKss ov
doi Φ=⋅⋅Φ−Φ

1-11
( ) ( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡ ⋅+⋅Φ=⋅⋅⋅Φ
sKsFKs
sKsFKs v
dov
di .1
( )( )
( )( ) ( )sHsFKKs
sFKKss
dv
dv
i
o =⋅⋅+
⋅⋅=
ΦΦ
Es la función de transferencia del lazo cerrado y muestra la respuesta ( )toσ a cambios en )(tiσ .
A veces podemos estar interesados en la respuesta del lazo a cambios en la frecuencia de entrada
( ) ( )dt
tdt ii
σω = , ( ) ( )sss ii Φ⋅=Ω
( )( )
( )( )
( )( )[ ]sFKKss
sFKKss
sss
sHdv
dv
i
o
i
o
⋅⋅+⋅⋅
=Φ⋅
Φ=
ΩΦ
=)(1
Otras veces la salida que interesa es la señal ( )tv2 , que contiene la información sobre el error de fases, basta con sustituir:
( ) ( )ss
KsV ov Φ=⋅2
( )( )
( )( )
( )( )sFKKs
sFKssK
ssssV
dv
d
iv
o
i ⋅⋅+⋅⋅
=Φ⋅Φ⋅
=Φ
2
Y también:
( )( )
( )( )
( )( )
( )( )sFKKs
sFKss
Ksss
Ks
ssV
sHdv
d
i
o
vi
o
vi ⋅⋅+⋅
=ΦΦ⋅=
Φ⋅Φ
⋅=Ω
=1)( 2
2
Lazo de primer orden.
El orden del lazo es el orden de ( ) ( )( )sssH
i
o
ΦΦ
=
En un lazo de primer orden ( ) AsF =
( )( )
( )( ) AKKs
AKssVsH
AKKsAKK
ss
dv
d
i
dv
dv
i
o
⋅⋅+=
Ω=
⋅⋅+⋅⋅
=ΦΦ
.)(
;
22
de forma que el comportamiento del lazo es el de un filtro paso bajo.
Tomando AKKK dvo ⋅⋅= , ( )( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅
+=
Ω=
vo
o
i KKsK
ssV
sH 1)( 22
Esta es la respuesta que expresa la tensión que alimenta el VCO, en función de la frecuencia instantánea de la señal de entrada. La respuesta impulsional correspondiente será:
)()( 002 tue
KK
th tK
v
⋅⋅= ⋅−

1-12
La constante Ko se conoce como el ancho de banda del lazo. Si el lazo está enganchado a una frecuencia portadora, y la frecuencia instantánea de entrada varía sinusoidalmente con frecuencia
mω ( )( )tmsenmAti ωω ⋅= en la salida v2(t) veremos una señal senoidal de frecuencia mω siempre que
0Km <ω . Cuando mω crece por encima de Ko, la salida del lazo cae. Por tanto, el ancho de banda del lazo es el ancho de banda efectivo para la señal moduladora que esté siendo demodulada por el PLL.
La figura siguiente muestra los polos de este filtro en el plano s en lazo cerrado y abierto y la respuesta frecuencial en lazo cerrado:
lazo cerrado lazo abierto
-Ko
lazo cerrado lazo abierto
-Ko K0
Kvv/rad
)()(2
ωω
ΩV
ωK0
Kvv/rad
)()(2
ωω
ΩV
ω En la figura se muestra la evolución de la tensión que alimenta el VCO cuando a la entrada se produce un cambio de frecuencia (respuesta al escalón).
1
1
v1 n( )
wi n( )
v2 n( )
4000 n0 100 200 300 400
1
0.5
0
0.5
1
Utilizar un lazo de primer orden con ( ) AsF = tiene algunas desventajas de tipo práctico. En el multiplicador del detector de fase se genera la frecuencia suma, que será alimentada al VCO. Además, otras posibles señales interferentes presentes en la señal, también entrarán. Por ello convendrá utilizar un filtro (un lazo de segundo orden).
Lazo de segundo orden.
El filtro más común es: ( )1
1ω
ω+
=s
sF que responde al esquema de la figura con RC1
1 =ω :
y obtenemos que: ( )( ) =
⋅++
⋅=
⋅⋅+
⋅+
⋅=Ω
oo
v
vdvd
vi
Ks
KsK
KKs
KKsKs
sV
1
2
1
22
1
11
1
11
ωω
es un filtro de segundo orden.

1-13
Las raices son ⎟⎟⎠
⎞⎜⎜⎝
⎛−±⋅−=
1
12,1
4112 ωω oKs
Podemos poner: on K⋅= 12 ωω y nωξω ··21 =
oK1
21 ω
ξ = para obtener la forma típica en que se expresa
un sistema de segundo orden.
( )( ) 22
22
21
nn
n
vi ssKssV
ωωξω
+⋅⋅+⋅=
Ω
Para lazo abierto (K0 =0), s1,2=-ω1, 0.
lazo abierto (Ko=0)
lazo cerrado
14−
i
OKω
ω⋅j
1ω−
lazo abierto (Ko=0)
lazo cerrado
14−
i
OKω
ω⋅j
1ω−
Para 0<K0<ω1/4 hay dos raíces reales. Los casos de interés se dan para K0>ω1/4, en el que las raíces son complejas. En este caso, la respuesta al impulso es una senoide amortiguada:
)(··142
sin·142
)(1
012
1
0102
1
tutKeKKKth
t
v⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅−⋅⋅=
⋅−
ωω
ωω ω
Las siguientes figuras muestran la respuesta temporal y frecuencial de este sistema para diferentes valores del factor de amortiguamiento (salvo la constante K0/Kv):

1-14
El ancho de banda del lazo es aproximadamente 10 ·ωω Kn= . El factor de amortiguamiento
oK1
21 ω
ξ = . Como vemos, el ancho de banda del lazo y el amortiguamiento no pueden fijarse de forma
independiente, lo cual sería muy conveniente. Además, como veremos, el margen de enganche es también dependiente de K0. Así, a veces se desea un ancho de banda pequeño para rechazar adecuadamente variaciones no deseadas de la frecuencia de entrada, y al mismo tiempo un gran margen de enganche, que permita el funcionamiento del PLL para un gran rango de frecuencias de entrada. Para reducir el ancho de banda del lazo en este caso, podríamos hacer ω1 muy pequeña, pero ello sería a costa de disminuir también mucho el amortiguamiento, presentando entonces el sistema oscilaciones.
Otras configuraciones para F(s) llevan a un lazo más flexible y permiten fijar los parámetros de forma independiente.
El valor conveniente para el ancho de banda del lazo depende del tipo de PLL: de seguimiento de portadora, o de seguimiento de modulación. Un PLL de seguimiento de portadora está diseñado para recuperar la portadora de la señal de entrada, que puede tener modulaciones de frecuencia o fase, o ruido de fase, y por tanto el PLL debería tener un ancho de banda tan estrecho como fuera posible, eliminando así dichas variaciones a la salida. Los PLLs de seguimiento de modulaciones están diseñados para trabajar como discriminadores de frecuencia (demoduladores de FM) en los que la salida del filtro debería reproducir el espectro de banda base que modula en frecuencia o fase a la portadora. En este caso, el ancho de banda del lazo debería de ser mayor que la mayor frecuencia moduladora.
Margen de enganche.
Hemos visto que la frecuencia de salida del oscilador:
( ) ( ) ( ) ( ) tftsenKKtvKt edvvo ∗⋅⋅=⋅= σω 2

1-15
Cuando ( ) 2πσ >te , el valor de ( )tv2 empezará a caer de forma no deseada.
Estaremos en enganche, así que el valor máximo que podrá seguir el VCO:
odvMAX KAKK =⋅⋅⋅≈∆ 10ω
Lo mismo ocurre si la diferencia se produce en el sentido contrario, es decir para ( ) 2πσ <te
Margen de captura.
Supongamos que el lazo está abierto (detrás del filtro), y se aplica a la entrada una señal con frecuencia distinta de la libre del VCO. A la salida del detector:
( ) ( ) ( ) ( ) tsenKttsenKtv oidoid ⋅−⋅=−⋅= ωωσσ1 .
A la salida del filtro: ( ) ( ) ( ) φωωωω +−⋅−⋅= tsenFKtv oioid2 ; ( )oiF ωωφ −= ,
y su valor máximo, con el factor de ganancia del VCO será la frecuencia de captura: ( )oivdv FKKKV ωωω −⋅⋅⋅=⋅= 2captura
Si comparamos las frecuencias de enganche y de captura, para 1er orden son iguales, ya que ( ) AF oi =−ωω . Para 2º orden, normalmente ( ) AoiF <−ωω (ganancia del filtro), y ωcaptura<ωenganche
Análisis del error de fase en régimen permanente.
Interesa el estudio del error de fase en régimen permanente, y en concreto el cálculo de )(tLim etσ
∞→, con
objeto de estudiar qué ocurre ante variaciones de la fase o la frecuencia de la señal de entrada.
Para el cálculo del límite del error, aplicamos:
( )( ) ( ) ( )s
sFKKssLim
sFKsV
sLimssLimtLim idvsDs
es
et
φφσ ⋅⋅⋅+
=⋅==→→→→∞
2
02
00)(·)(
( ) ( ) ( )ssFKKs
ss idv
e φφ ⋅⋅⋅+
=
of
infLωcωcω−
cω2
Lω2
of

1-16
Típicamente se estudian tres casos:
a) A la entrada tenemos un escalón (salto) en la fase: ( )s
s ii
φφ = .
( ) ( ) ssFKKssLimtLim i
dvse
t
φσ ⋅
⋅⋅+=
→∞→
2
0
Considerando que F(s) es de tipo paso bajo, en general F(0)=A, por lo que:
( ) 0·
2
0=⋅
⋅⋅+→ idv
s sAKKssLim φ
Esto significa que ante un cambio brusco en la fase de la señal de entrada, el sistema será capaz de recuperarse, tras un transitorio, volviendo a la situación de enganche anterior.
b) A la entrada tenemos un salto de frecuencia: ( ) ( ) 2ss
ss ii
ωφωω ∆=→
∆=Ω→∆ .
( ) ( ) AKKssFKKssLimtLim
dvdvse
t ⋅⋅∆
=∆⋅
⋅⋅+=
→∞→
ωωσ 2
2
0
para cualquier orden del lazo.
De esta forma, se obtiene un error de fase constante, que podemos hacer más pequeño haciendo K0 grande.
c)A la entrada tenemos una rampa de frecuencia: ( ) ( ) 32 ss
ss ii
ωφωω ∆=→
∆= .
( ) ( ) AsFte =∞→ si σ : el lazo de primer orden no será capaz de responder a rampas de frecuencia en la entrada.
Para el lazo de segundo orden, con ( )1
1ω
ω+
⋅=s
AsF :
( ) ∞→⋅
+⋅⋅+
∆=
∞→ ss
KKtLim
dve
t
11
01
1ω
ωωσ
Sin embargo existen otras configuraciones para F(s), que también dan lazos de segundo orden, que permiten obtener errores finitos de fase para rampas de frecuencia en la entrada.

1-17

1-18
1.4.4 DETECCIÓN FM
Un caso particular de aplicación del PLL es como demodulador de señales FM (PLL de seguimiento de modulación). Si consideramos que la señal de entrada al PLL es una señal modulada en FM:
∫ ∞−=
t
wi dmKt λλσ )()( y s
sMKs wi)()( =Φ
siendo Kw rad/s·v (2πHz/v)la constante de desviación de frecuencia de la modulación, y m(t) el mensaje.
Tomando la función de transferencia:
( )( )
( )( )sFKKs
sFKsssV
dv
d
i ⋅⋅+⋅⋅
=Φ
2 y fjs ··2· π= ,
Dv
v
w
KKfjfF
fFKK
fMfV
··2·)(
)(·)·()(2 π+
=
F(f) será de tipo paso bajo. Si el ancho de banda de M(f) se encuentra en la banda de paso de F(f), y si se
cumple que )0(FKK Dv
<<ω
, entonces, )(·)(2 fMKK
fVv
w≅ .
La condición anterior limitará el ancho de banda de la señal moduladora m(t) a π2
0KB << Hz.
1.4.5 EL LAZO DE COSTAS
La señal modulada DSB ( ) ( ) ttmAts cc ωcos⋅⋅= no tiene componente en cω si el mensaje no tiene componente continua. Por eso un PLL convencional no podrá engancharse a esa frecuencia. Una posibilidad para realizar la detección es formar la señal al cuadrado:
( ) ( ) ( ) ⎟⎠⎞
⎜⎝⎛ +⋅⋅=⋅=
22cos12cos 2222 ttmAttmAts c
cccω
ω
y como ( )tm2 sí tiene componente continua podemos extraer la frecuencia 2fc de ( ) ttm cω2cos2 ⋅ .
Otra posibilidad más elaborada es utilizar el LAZO DE COSTAS.
El Lazo de Costas se basa en un VCO, y tiene un esquema basado en un PLL:
( ) ( )icttm φω +⋅ cos
VCO F(s)
2π
LPF
LPF
( )ts1
( )ts
( )ts2 ( )tm
( ) ( )icttm φω +⋅ cos
VCO F(s)
2π
2π
LPF
LPF
( )ts1
( )ts
( )ts2 ( )tm

1-19
Calculamos las señales del sistema en régimen permanente (lazo enganchado). Consideramos la salida del VCO como )cos( 0σω +tc .
( ) ( ) ( ) ( ) ( ) oioic tmttmts σσσσω −⋅+++⋅= cos2cos21
1
( ) ( ) ( ) ( ) ( ) oioic tmttmts σσσσω −⋅+++⋅= sin2sin21
2
Tras el filtrado LPF:
( ) ( ) ( )
( ) ( ) ( )oiC
oiF
tmts
tmts
σσ
σσ
−⋅=
−⋅=
sin21
cos21
( ) ( ) ( ) ( ) ( ) eeecF tmtmtststq σσσ 2sin81sincos
41 22 ⋅=⋅=⋅=
Si el error es pequeño ee σσ 22sin ≈
( ) ( ) etmtq σ⋅≈ 241
El filtro F(s) será de tipo paso bajo, de forma que actuará como un integrador para m2(t), obteniendo la energía del mensaje, que se supone que es constante, de forma que a la salida obtendremos una señal proporcional a eσ que será capaz de corregir las variaciones de frecuencia y fase de la señal de entrada, de forma análoga a como lo hace el PLL.
Implementación discreta del lazo de Costas.
El PLL y el lazo de Costas estudiados pueden analizarse en el dominio discreto. Aquí estudiaremos simplemente una posible implementación discreta del Lazo de Costas.
Vamos a considerar la siguiente implementación discreta:

1-20
T.Hilbert( )ns ( )ns+ ( )nTc
( )nTje σ−
( )⋅− je
( )nTσ
1−z
Tcω
α
11 −− zγβ
( )zF
2πKvT( )nTc1
( )nTq
x(n)
( )nTc1
VCO
T.Hilbert( )ns ( )ns+ ( )nTc
( )nTje σ−
( )⋅− je
( )nTσ
1−z
Tcω
α
11 −− zγβ
( )zF
2πKvT( )nTc1
( )nTq
x(n)
( )nTc1
VCO
Las líneas continuas indican parte real, y las discontinuas parte imaginaria. Supongamos a la entrada una señal modulada en DBL y muestreada a velocidad 1/T: ( ) ( ) ( )icc nTnTmAnTs σω +⋅⋅= cos , en donde m(nT) es el mensaje.
Formamos la señal analítica: ( ) ( ) )(ˆ nTsjnTsnTs +=+
y multiplicamos por el fasor ( ) ( ) ( )nTcenTs nTj =⋅ −+ σ , obteniendo el equivalente paso bajo de s(nT).
A continuación calculamos las partes real e imaginaria del equivalente paso bajo c(nT):
( ) ( ) ( ) nTjenTsenTc σ−+ ⋅ℜ=1 , ( ) ( ) ( ) nTjenTsnTc σ−+ ⋅ℑ=2
( ) ( ) ( ) ( ) ( ) ( )00 σσσωσω −+−+ ⋅⋅=⋅⋅⋅= icic jc
nTjnTjc enTmAeenTmAnTc
( ) ( ) ( ) ( )oic nTmAnTcenTc σσ −⋅⋅=ℜ= cos1
( ) ( ) ( ) ( )oic nTmAnTcnTc σσ −⋅⋅== sinIm2
0 ei σσσ =−
( ) ( ) ( ) 0cy c ,0 cuando 21 === nTnTmAnT ceσ
Por eso una estrategia para declarar el lazo enganchado es calcular ( )nTc 22 , filtrarlo paso bajo y decidir si
está enganchado o no según su valor esté por debajo o por encima de un cierto umbral. En condiciones de lazo enganchado, la señal en c1(nT) será la señal demodulada.
Formamos q(nT), multiplicando las partes real e imaginaria del equivalente paso-bajo:

1-21
( ) ( ) ( ) ( ) ( ) ( ) ( ) ecoioic sennTmAsennTmAnTcnTcnTq σσσσσ 221cos 2222
21 ⋅⋅=−⋅−⋅⋅=⋅=
Si el error es pequeño: ( ) ( ) ec nTmAnTq σ⋅⋅≈ 22 .
VCO:
Analizamos ahora la implementación del VCO. Sabemos que en un VCO:
)()( 0 txKftf v+=
∫∫∫ ∞−∞−∞−+=+==
tv
tv
tdxKtfdxKfdft λλππλλπλλπσ )(22))((2)(2)( 00
En un sistema discreto, t=nT, y la integración es una suma:
∑∞−
+=n
v TlxKnTfnT )(22)( 0 ππσ
Si calculamos ))1(( Tn −σ :
∑−
∞−+−=−
100 )(222))1((
nv TlxKTfnTfTn πππσ
y entonces )(22))1(()( 0 nTxKTfTnnT vππσσ ++−=
que se corresponde con el esquema:
Z-1
X(n)2πKvT
2πf0T
σ(nT)
Z-1
X(n)2πKvT
2πf0T
σ(nT)
Al integrar el esquema anterior en el esquema general, nos encontramos con que x(nT) no está disponible, ya que se calcula a partir de σ(nT). Por eso, tendremos un retardo de una muestra, y utilizaremos x((n-1)T):
)1(22))1(()( 0 −++−= nTxKTfTnnT vππσσ
que se corresponde con el esquema:

1-22
Z-1
X(n-1)2πKvT
2πf0T
σ(nT)Z-1
X(n)2πKvT
Z-1
X(n-1)2πKvT
2πf0T
σ(nT)
Z-1
X(n-1)2πKvT
2πf0T
σ(nT)Z-1
X(n)2πKvT
equivalente a:
Z-1
X(n)2πKvT
2πf0T
σ(nT)
Z-1
X(n)2πKvT
2πf0T
σ(nT)
Podemos comprobarlo:
))1((22)()( 0 TnTfTKnxnT v +=++ σππσ
))((22)1())1(( 0 TnTfTKnxTn v σππσ =+−+−
Analizamos ahora el filtro F(z):
( )nTq ( )nTσ
11 −− z
β( )nTq ( )nTσ
11 −− z
β
β
1−z
( )nTσ
( ) ( ) ( )[ ]TnnTqnT 1−+⋅= σβσ
β
1−z
( )nTσ
( ) ( ) ( )[ ]TnnTqnT 1−+⋅= σβσ
El subsistema anterior actúa como un integrador.

1-23
( ) ( ) ( ) 1
1
1
1
1
1
1 1
1
111
1 −
−
−
−
−
−
− −
⋅+
−+=
−⋅−+
=−
+−⋅=
−+=
z
z
zz
zz
zzF βα
α
βααβαβαβα
El filtro F(z) tiene un cero en 10 <+
=βα
αz y un polo en 1=pz , de forma que actúa como filtro paso
bajo.
1.5 EJERCICIOS
1.5.1 PROBLEMA 1
Deduce y dibuja el esquema de un VCO discreto.
1.5.2 PROBLEMA 2
El VCO de un PLL de primer orden tiene una constante de desviación de frecuencia Kv=2π·1kHz/v. La constante de lazo vale K0=2·π·500s-1 y la frecuencia de libre oscilación del PLL es de 500Hz (a dicha frecuencia la tensión de control del VCO es de 0v.).
a) Para una frecuencia de entrada constante e igual a 250Hz, encuentre el valor de la tensión de control del VCO.
b) Dibuje el modelo lineal del PLL, y calcule la función de transferencia Vc(s)/Ωi(s), en donde vc(t) es la tensión de control del VCO y ωi(t) la pulsación instantánea de la señal de entrada.
c) Dibuje la respuesta frecuencial del PLL calculada en el apartado b. Suponiendo el lazo enganchado a una frecuencia de 500Hz, dibuje la respuesta que obtendría para una entrada de la forma:
)(·250··2)( tuti πω = )
d) Calcule cuál será la tensión de control del VCO vc(t) cuando a la entrada tengamos una señal modulada en FM )·100··2·cos5.0·500··2·sin(10)( tttx ππ −= .
1.5.3 PROBLEMA 3
Demuestre que el Lazo de Costas puede utilizarse para demodular una señal modulada en banda lateral única (considere que la señal a la entrada del lazo de Costas es ttmttmts 00 sin)(ˆcos)()( ωω −=
1.5.4 PROBLEMA 5
Un avión de alta tecnología transmite una portadora sin modular a un terminal terrestre, en que se dispone de un PLL con filtro de lazo F(s)=N(s)/D(s). El PLL está inicialmente en situación de enganche con la señal transmitida por el avión. En t=0, el avión realiza una maniobra cuya dinámica queda descrita con la ecuación de la aceleración del avión, a(t)=A·t2, en donde A es una constante y a(t) es la aceleración. El movimiento relativo del avión con respecto a la estación causará un desplazamiento Doppler en la frecuencia recibida de
)(·)( 0 tvcf
tf D =∆ , en donde v(t) es la velocidad del avión. ¿De qué orden debe de ser como mínimo el PLL
para poder seguir la frecuencia recibida? Justifique su respuesta.
Pista: Considere que pueden aplicarse las ecuaciones lineales del PLL. Calcule el error de fase en régimen permanente, y analice cuándo puede hacerse cero.

1-24

1-25
1.6 BIBLIOGRAFÍA
A. Bruce Carlson. Communicactions Systems: An Introduction to Signals and Noise in Electrical Communications. McGraw-Hill, 3ªEd. 1986
Ferrel G. Stremler. “Introduction to Communications Systems”.Addison-Wesley, 3ª Ed. 1990
Paul R. Gray, Robert G. Meyer. “Analysis and Design of Analog Integrated Circuits (Cap.10, aptdo 4—PLLs) “John Wiley & Sons, 1984
Michel C. Jeruchim, Philip Balaban, K. Sam Shanmugan. “Simulation of Communicaction Systems”. Plenum Press, 1994
J.C. Bic, D. Duponteil, J.C. Imbeaux. “Elements of Digital Communicaction”. John Wiley & Sons, 1991
Roland E. Best Phase-Locked Loops Design, Simulation & Applications McGraw-Hill, 3ªEd. 1997