Embed Size (px)
Citation preview
- 1 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Kutatás-fejlesztés a közlekedési
programok területén
Kutatás-fejlesztés a közlekedési
programok területénProf. Bokor JózsefProf. Bokor József
MTA SZTAKI - BMEMTA SZTAKI - BME
- 2 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
• Research trends and perspectives in the area of– Road vehicle and road traffic systems– Air vehicle and air traffic systems
• Interactions in research for future automatic systems will be highlighted
- 3 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Content
• Overview of aircraft and air traffic control systems
• Research projects in SZTAKI and BME on Flight and Road Traffic Systems
• Interactions with road vehicle control systems
• Future trends
- 4 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Aircraft and Air Traffic Control Aircraft and Air Traffic Control SystemsSystems
• Between 2000 and 2007 the total number of vehicles was increased by 35-40%.
• In the next two decades the air traffic will be doubled.
• This implies an expected demand of approximately 24000 aircrafts.

- 5 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Aircraft and Air Traffic Control Systems
Aircraft and Air Traffic Control Systems
• What existing or new tasks should be automated an why?• What additional performance requirements will arise?• How to incorporate the emerging C3 (Computing, Communication and Control) technology (in addition to research for better air frame, engine, new materials)• Cost effectiveness and environmental protection requirements will be strenghten

- 6 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
1. Fly by Wire system: Fly-by-wire control system (implemented on board computers) are to operate the control surfaces and engines to ensure that:• The aircraft is simultanously robustly stable and manoveuvrable against change in Cg, speed, configuration. Extends the stability domain!• Good command following (e.g: for stick)• Protects the aircraft to stay in a safe flight envelope (keeps constraints on pitch, roll, bank angle, high speed, high g level)• Fault detection and reconfiguration, control under loss of effectiveness in control surfaces.
Aircraft and Air Traffic Control SystemsThree loops of control and automation:Aircraft and Air Traffic Control SystemsThree loops of control and automation:
- 7 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Aircraft and Air Traffic Control SystemsAircraft and Air Traffic Control Systems
2. Guidance and autopilot control loop
• Trajectory tracking• Command following: vertical speed, flight path angle,
speed. Ex.: Autopilot, Autothrust systems
This is a hybrid control system: • Discrete states are the guidance modes: fly a given heading (HDG mode), Altitude Hold (ALT mode).• Continuous state variables of the flying aircrafts
Need for theory and application of switching nonlinear (LPV) systems!
- 8 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Aircraft and Air Traffic Control SystemsAircraft and Air Traffic Control Systems
3. Navigation loop:
Guidance of the aircraft along a flight plan or flying a mission.
In traditional commertial aircrafts the role of pilots is dominating with collaboration with Air Traffic Management (ATM) systems.

- 9 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Aircraft and Air Traffic Control SystemsAircraft and Air Traffic Control Systems
4. New loop: Flight Management System (FMS)
• FMS sends the waypoint data to the autopilot
• Autopilot guides the aircraft along the feasible active flight path leg operating under „optimum” conditions.
• Pilot selects the appropriate guidance mode.

- 10 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
The four control loops of air traffic control systems
- 11 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Aircraft and Air Traffic Control SystemsAircraft and Air Traffic Control Systems
UAV control systems fully automate the 4 loops and:
• Automate mission flying and formation flying.
• Use Software Enabled Control technology to extend flight capabilities beyond human controlled systems.
Strong interaction with research trends in automated• road• underwatervehicle control systems.
- 12 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
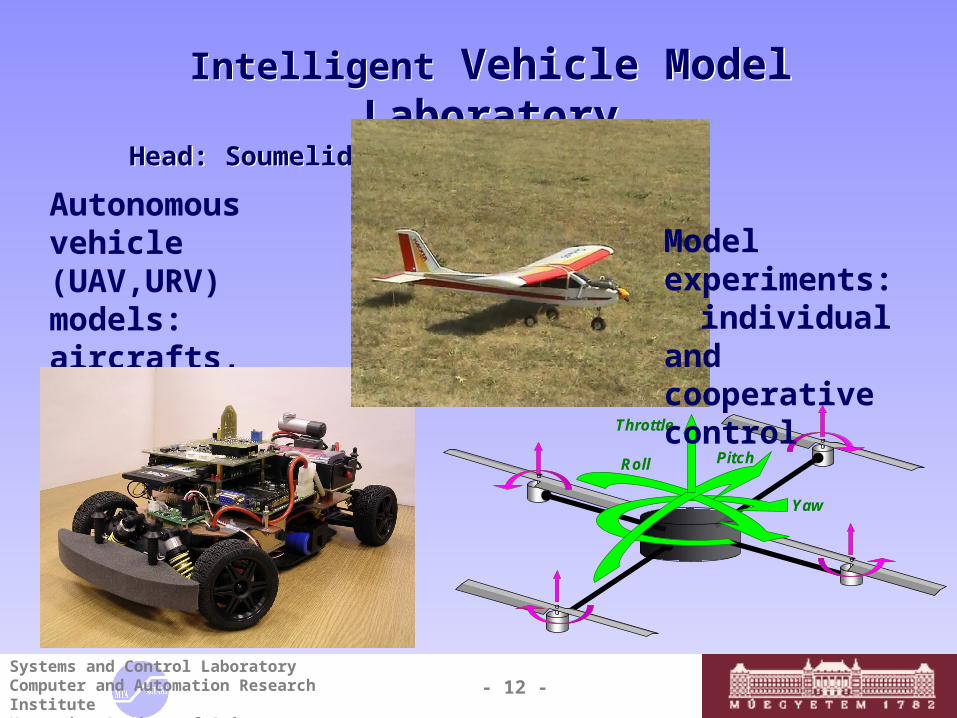
Intelligent Vehicle Model LaboratoryHead: Soumelidis Alexandros, PhDIntelligent Vehicle Model Laboratory
Head: Soumelidis Alexandros, PhD
Autonomous vehicle (UAV,URV) models: aircrafts, helicopters, cars
Throttle
Pitch
Yaw
Roll
Model experiments:individual and
cooperative control
- 13 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
UAV labUAV lab
Systems and Control Laboratory joined to „UAV lab” initiated by the Department of Aerospace Engineering and Mechanics
of the University of Minnesota
Members:
University of Minnesota (Prof. Gary Balas)University of Sannio, Benevento, Italy (Prof. Francesco Borrelli)Computer and Automation Research Institute (Prof. Jozsef Bokor)Budapest University of Technology and Economics (Prof. J. Bolor)

- 14 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
The UAV research group is actively involved in expanding the capabilities of UAV systems for today and tomorrow. Current research focuses on development of navigation, guidance and control strategies for autonomous flight in enclosed indoor environments. The focus of research is not only to address issues from technological standpoint, but also ensure the system is built mostly out of commercial of the shelf (COTS) components to maximize cost benefits, share the know-how of design and development of hardware and software with researchers across the world with open source philosophy.
UAV labUAV labObjectives:
- 15 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
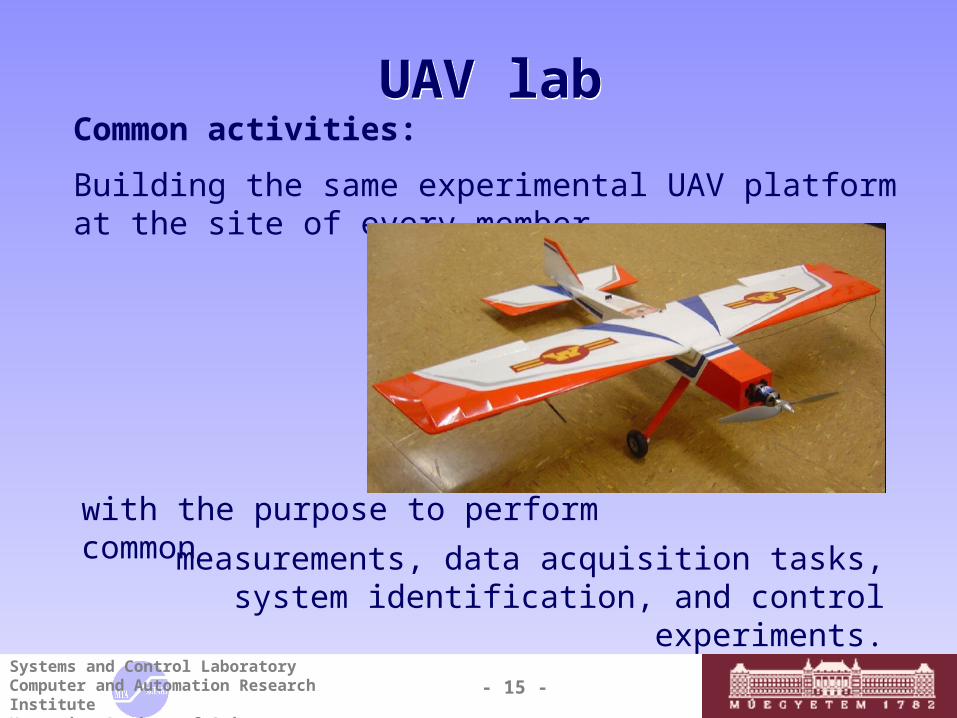
Building the same experimental UAV platform at the site of every member
UAV labUAV labCommon activities:
with the purpose to perform common
measurements, data acquisition tasks, system identification, and control experiments.
- 16 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
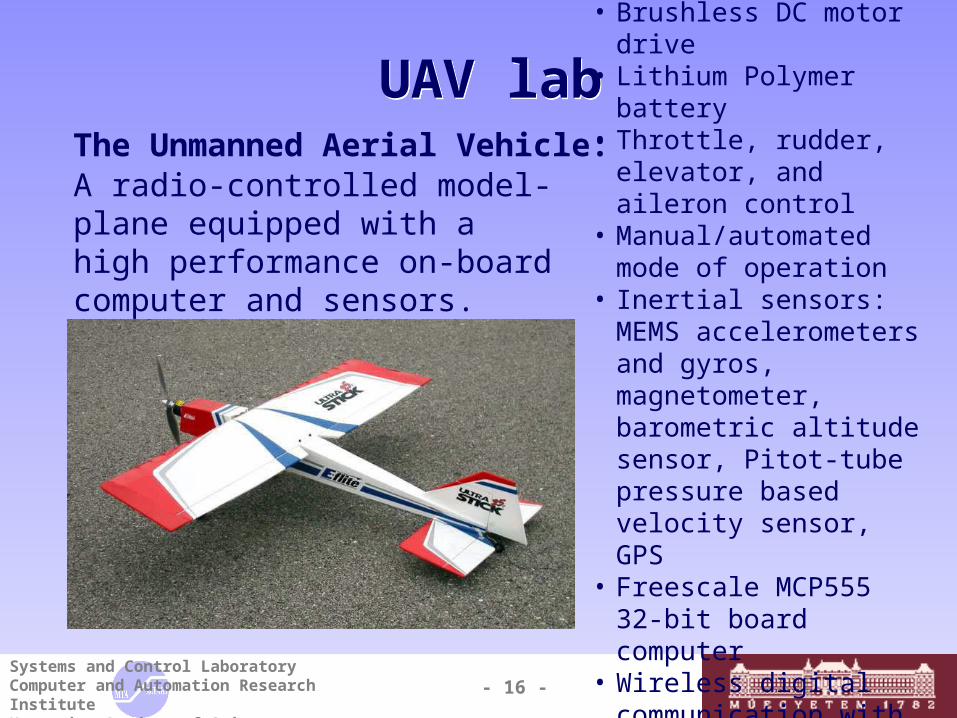
A radio-controlled model-plane equipped with a high performance on-board computer and sensors.
UAV labUAV labThe Unmanned Aerial Vehicle:
• Brushless DC motor drive• Lithium Polymer battery• Throttle, rudder, elevator,
and aileron control• Manual/automated mode
of operation• Inertial sensors: MEMS
accelerometers and gyros, magnetometer, barometric altitude sensor, Pitot-tube pressure based velocity sensor, GPS
• Freescale MCP555 32-bit board computer
• Wireless digital communication with a Ground Station

- 17 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
UAV labUAV labGuidance and Autopilot Loops
• Waypoint Guidance (lateral–directional control)• Altitude hold• IAS (Indicated Air Speed) hold• Extended Kalman Filter for estimating states• Data acquisition – sensor and estimated data
Navigation and Flight Control
• On-board control – waypoint guidance• Trajectory (waypoint) planning, altitude, IAS setpoint
control on the Ground Station• Takeoff / landing, emergency operations: manual
control

- 18 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
UAV labUAV lab
Recent tasks:
• System identification based upon test-flight data• Building accurate control oriented mathematical
model• Designing controllers for several flight situations• Implementing controllers on the board computer• Validation & verification of the controllers in real flight
conditions• Considering safety and reliability conditions

- 19 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
The Quadrotor Helicopter conceptThe Quadrotor Helicopter concept
Thrust
Pitch
Yaw
Roll
• Yaw, pitch, roll, and thrust control
• 4 rotors in X-shaped layout
• 2 pairs counter-rotating

- 20 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Building a Quadrotor HelicopterBuilding a Quadrotor Helicopter
Wireless
Communication
Motor
Control
Motor
Control
Motor
Control
Motor
Control
Global Position
Sensing
Sensors
Inertial, magnetic, US
Power Supply
Control
Main Control
Unit
CAN network
• Embedded, network-based distributed control
• Multiple microcomputers interconnected CAN
• Nonlinear model-based control

- 21 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Measurement and identificationMeasurement and identification• Static and dynamic
characteristics of a rotor and drive assembly
• Thrust and reaction torque measurements
• A microcontroller-based measurement device
- 22 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
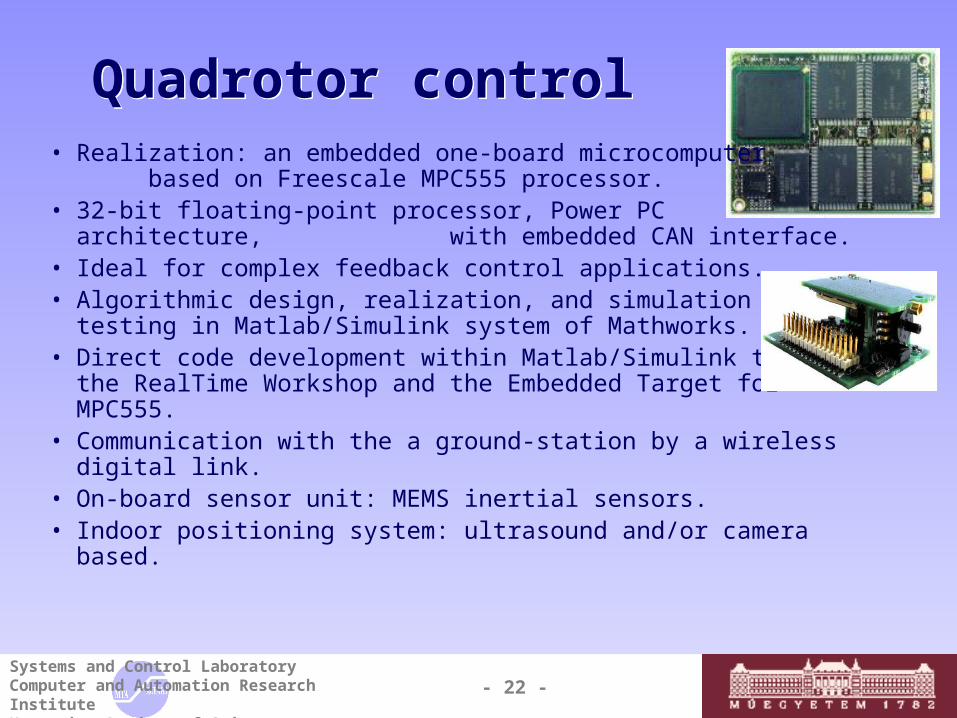
Quadrotor controlQuadrotor control• Realization: an embedded one-board microcomputer
based on Freescale MPC555 processor.• 32-bit floating-point processor, Power PC architecture,
with embedded CAN interface.• Ideal for complex feedback control applications.• Algorithmic design, realization, and simulation testing in
Matlab/Simulink system of Mathworks.• Direct code development within Matlab/Simulink through the
RealTime Workshop and the Embedded Target for MPC555.• Communication with the a ground-station by a wireless digital link.• On-board sensor unit: MEMS inertial sensors.• Indoor positioning system: ultrasound and/or camera based.

- 23 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Indoor positioning: RF&USIndoor positioning: RF&US
• Ultrasound-based positioning• RF-based synchronization
Ultrasoundtransmitter On-board
ultrasoundreceiver
- 24 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
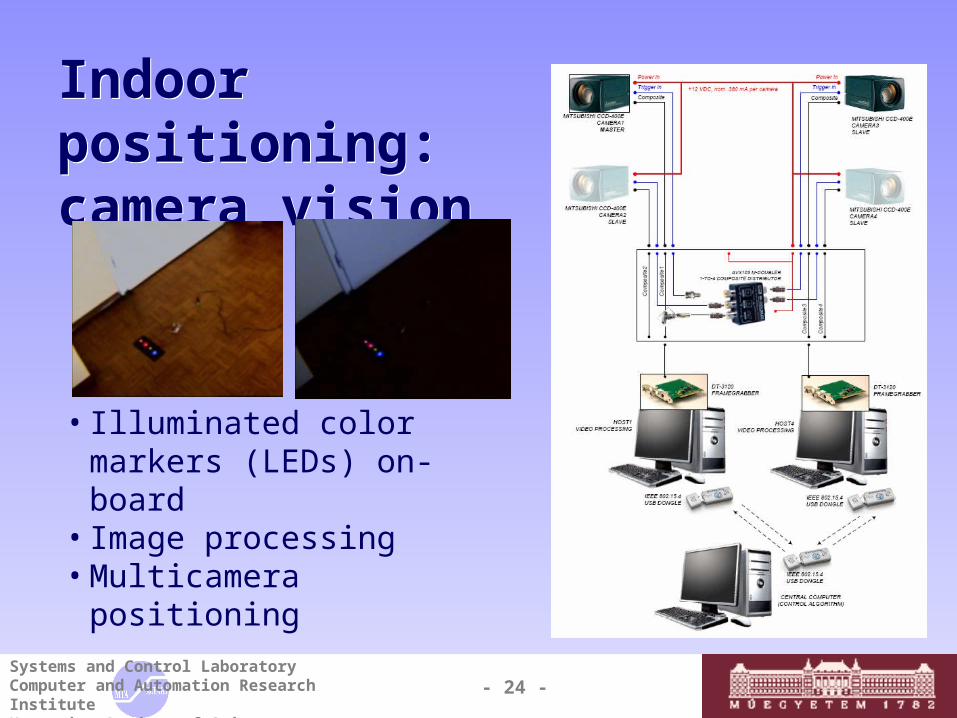
Indoor positioning:camera visionIndoor positioning:camera vision
• Illuminated color markers (LEDs) on-board
• Image processing• Multicamera positioning
- 25 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
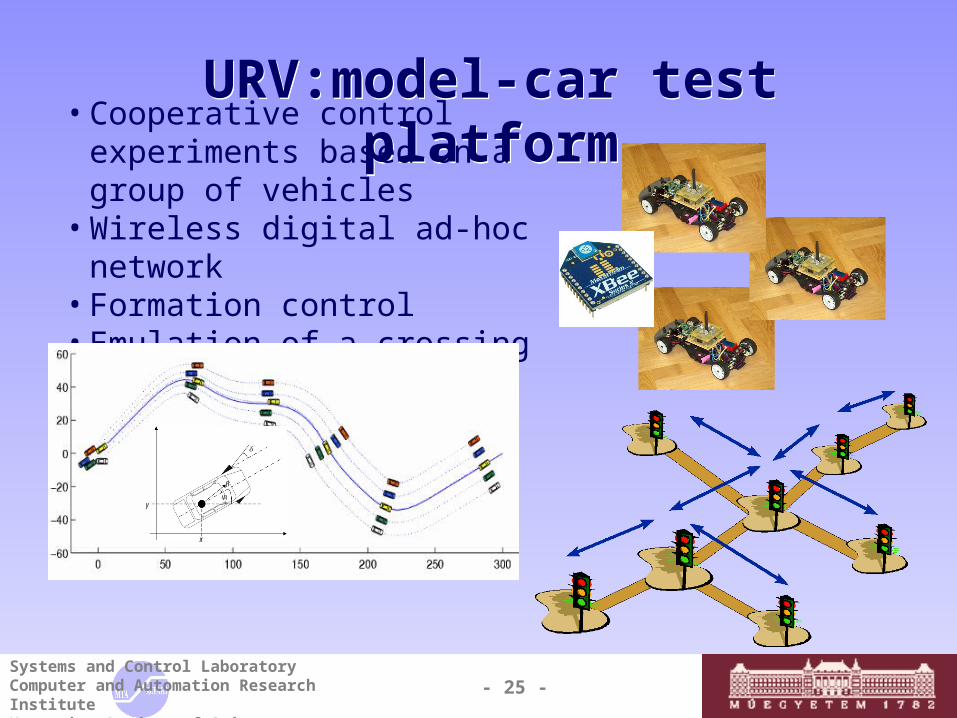
URV:model-car test platformURV:model-car test platform• Cooperative control experiments
based on a group of vehicles• Wireless digital ad-hoc network• Formation control• Emulation of a crossing
x
y

- 26 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Future Goals in UAV and URVFuture Goals in UAV and URV
UAV:
• Cooperative control of multiple UAVs, formation control• Reconfigurable / fault tolerant control• Environment sensing, navigation based upon sensor
fusion – inertial, image, etc. sensors
1:5 independent 4-wheel electric car:• Integrated electronic control• Distributed control based upon FlexRay network
URV:
• Modeling complex situations requiring cooperation• High-fidelity formation and traffic simulations
- 27 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Future developments: • Automated taxing (Messier-Bugatti-BME and partners)• Automatic take-off, landing• Collision avoidance in air or ground• Increase of situational awarness by better representation of
aircraft states and other enviroment like: - inrfared or millimetre radar sensors - use of terrain and obstacle data base• Mission and formation flying (automated)• Role of pilots: - control and monitor of the automated systems - decision making in major failure as
unpredicted dangerous situations

- 28 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Improving steering system safety, availability and competitiveness
Towards More Electric Aircraft
Distributed and Redundant Electro mechanical nose gear Steering System
FP6 project led by Messier-Bugatti
www.dress-project.eu
- 29 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
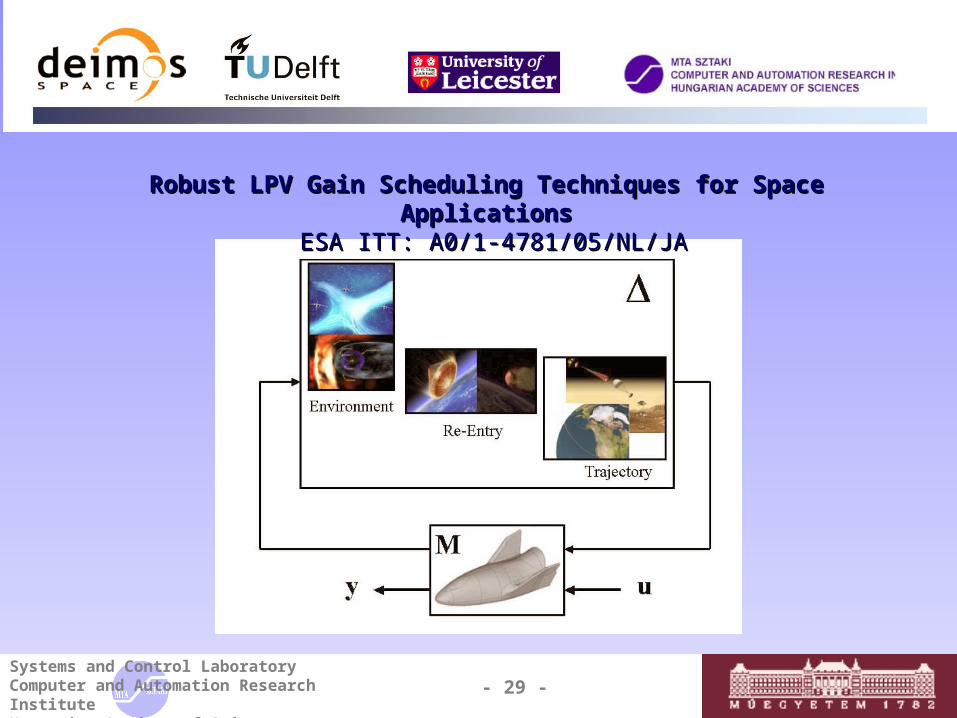
Robust LPV Gain Scheduling Techniques for Space ApplicationsRobust LPV Gain Scheduling Techniques for Space Applications ESA ITT: A0/1-4781/05/NL/JA ESA ITT: A0/1-4781/05/NL/JA
- 30 -Systems and Control LaboratoryComputer and Automation Research InstituteHungarian Academy of Sciences
Thank You for Your Attention !