Embed Size (px)
Citation preview

System Design: The Absentee in System Design: The Absentee in System Theory System Theory
Robert E SkeltonUCSD
June 2, 1999 ACC619 822 1054, [email protected]

2
Dedicated to:Dedicated to:Dedicated to:Dedicated to:Dedicated to:Dedicated to:Dedicated to:Dedicated to:
Osita NwokahOsita NwokahOsita NwokahOsita NwokahOsita NwokahOsita NwokahOsita NwokahOsita Nwokah, , , , , , , , Friend, ScholarFriend, ScholarFriend, ScholarFriend, ScholarFriend, ScholarFriend, ScholarFriend, ScholarFriend, Scholar
AdhikariAdhikariAdhikariAdhikariAdhikariAdhikariAdhikariAdhikariAldrichAldrichAldrichAldrichAldrichAldrichAldrichAldrichCallafon Callafon Callafon Callafon Callafon Callafon Callafon Callafon GrigoriadisGrigoriadisGrigoriadisGrigoriadisGrigoriadisGrigoriadisGrigoriadisGrigoriadisHelton Helton Helton Helton Helton Helton Helton Helton
KiichiroKiichiroKiichiroKiichiroKiichiroKiichiroKiichiroKiichiroLuLuLuLuLuLuLuLuMingori Mingori Mingori Mingori Mingori Mingori Mingori Mingori MurakamiMurakamiMurakamiMurakamiMurakamiMurakamiMurakamiMurakamiPinaud Pinaud Pinaud Pinaud Pinaud Pinaud Pinaud Pinaud
Roman Roman Roman Roman Roman Roman Roman Roman SatoSatoSatoSatoSatoSatoSatoSatoSultan Sultan Sultan Sultan Sultan Sultan Sultan Sultan WilliamsonWilliamsonWilliamsonWilliamsonWilliamsonWilliamsonWilliamsonWilliamsonYamashitaYamashitaYamashitaYamashitaYamashitaYamashitaYamashitaYamashita
With a Little Help From My FriendsWith a Little Help From My FriendsWith a Little Help From My FriendsWith a Little Help From My FriendsWith a Little Help From My FriendsWith a Little Help From My FriendsWith a Little Help From My FriendsWith a Little Help From My Friends

3
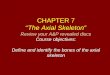
Hubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space Telescope(next servicing mission)(next servicing mission)(next servicing mission)(next servicing mission)(next servicing mission)(next servicing mission)(next servicing mission)(next servicing mission)
•• NewNew Solar ArraySolar Array•• Old Old ControllerController

44
Technology: What Paved the Way?Technology: What Paved the Way?
• 1st Half of 20th Century: PHYSICSPHYSICS
• 2nd Half of 20th Century: ENGINEERINGENGINEERING(Component Technology)(Control is a component )
• Next? SYSTEMSSYSTEMS(Interdisciplinary Technology)

5
OutlineOutline•• Designing Designing SystemsSystems•• Designing Designing Models for SystemsModels for Systems•• Inspirations FromInspirations From
•• Designing Designing Controlled StructuresControlled Structures

6
Pin the Tail on the Performance Pin the Tail on the Performance Pin the Tail on the Performance Pin the Tail on the Performance Pin the Tail on the Performance Pin the Tail on the Performance Pin the Tail on the Performance Pin the Tail on the Performance Limiting TechnologyLimiting TechnologyLimiting TechnologyLimiting TechnologyLimiting TechnologyLimiting TechnologyLimiting TechnologyLimiting Technology
Sensing
Manufacturing
Physics
Computing
Modeling
Signal Processing
Control
systems
theory

7
•• Universities Teach Universities Teach CComponentomponent TechnologyTechnology– materials, dynamics, signal processing, control
• Leading to: uncoordinated multidisciplinary tasks–– ManufactureManufacture components, then–– ModelModel components (physics), then–– Connect, Measure, ActuateConnect, Measure, Actuate components, then–– ControlControl the interconnected components
• Problem: dealing with sufficient rather than necessary•• SystemsSystems approach needed •• Michael FaradayMichael Faraday: : “Begin with the “Begin with the wholewhole,,
then construct the then construct the partsparts””
Systems Design TodaySystems Design TodaySystems Design TodaySystems Design TodaySystems Design TodaySystems Design TodaySystems Design TodaySystems Design Today

8
When is the Whole When is the Whole LESSLESS Than the Sum of the Parts?Than the Sum of the Parts?
•• The answer: The answer: usuallyusually•• Today, components are Today, components are overdesignedoverdesigned to compensate for to compensate for
the lack of coordination in their designthe lack of coordination in their design•• A Misconception: “A Misconception: “The best system is made from the best The best system is made from the best
componentscomponents” ” •• Often, more gain in Often, more gain in integratingintegrating two disciplines, than two disciplines, than
gained by gained by new technologynew technology in either discipline in either discipline •• Examples ………….Examples ………….

9
Given a Given a Given a Given a Given a Given a Given a Given a SystemSystemSystemSystemSystemSystemSystemSystem RequirementRequirementRequirementRequirementRequirementRequirementRequirementRequirementWhere Should We Invest?Where Should We Invest?Where Should We Invest?Where Should We Invest?Where Should We Invest?Where Should We Invest?Where Should We Invest?Where Should We Invest?
ComponentX
• How accurately to ModelModel component X? • How accurately to ManufactureManufacture component X?• Is Component X even NecessaryNecessary?• How should the components be ConnectedConnected?
•• Control Control Control Control Control Control Control Control is ais ais ais ais ais ais ais a ComponentComponentComponentComponentComponentComponentComponentComponent technologytechnologytechnologytechnologytechnologytechnologytechnologytechnology

10
Finite Precision ComputingFinite Precision Computing
ODE solverODE solverODE solverODE solverODE solverODE solverODE solverODE solver
)),,(())(( eeTTzzGGuuzzGGyyTT
ee++++++++================
) ,(ββββββββee
uu yy
2 −i
ββββ22121=Eee))((
))((eexxCCyy
BuBueexxAAxx++++++++========
++++++++++++++++========δ
: No Clue about: No Clue about: No Clue about: No Clue about: No Clue about: No Clue about: No Clue about: No Clue about Basis T Basis T Basis T Basis T Basis T Basis T Basis T Basis T From PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom Physicsxx vvvvvvvv
•• Useless to Model Better Than ErrorUseless to Model Better Than ErrorUseless to Model Better Than ErrorUseless to Model Better Than ErrorUseless to Model Better Than ErrorUseless to Model Better Than ErrorUseless to Model Better Than ErrorUseless to Model Better Than Error e e e e e e e e (unbounded over(unbounded over(unbounded over(unbounded over(unbounded over(unbounded over(unbounded over(unbounded over TTTTTTTT))))))))
•• How We….How We….How We….How We….How We….How We….How We….How We…. MODEL One Component MODEL One Component MODEL One Component MODEL One Component MODEL One Component MODEL One Component MODEL One Component MODEL One Component Affects TheAffects TheAffects TheAffects TheAffects TheAffects TheAffects TheAffects The
Dynamics of AnotherDynamics of AnotherDynamics of AnotherDynamics of AnotherDynamics of AnotherDynamics of AnotherDynamics of AnotherDynamics of Another

11
ee ((((((((β β β β β β β β ))) )
Unified Signal Processing/Control Unified Signal Processing/Control
ODE solverODE solverODE solverODE solverODE solverODE solverODE solverODE solver
11))))((((
((minmin)),,(())((
11 TTExxExxTT
TTGGeeTTzzGGuuzzGGyy
TT
iiiiTTTT
TTee
ee
========∋∋∋∋∋∋∋∋
++++++++================
−−−−−−−−−−−−−−−−
) ,(ββββββββee
uu yy
2 −i
ββββ22121=Eee
•• Component technologyComponent technologyComponent technologyComponent technologyComponent technologyComponent technologyComponent technologyComponent technology:::::::: Design Design Design Design Design Design Design Design (A,B,C),(A,B,C),(A,B,C),(A,B,C),(A,B,C),(A,B,C),(A,B,C),(A,B,C), thenthenthenthenthenthenthenthen TTTTTTTT
•• Systems technologySystems technologySystems technologySystems technologySystems technologySystems technologySystems technologySystems technology:::::::: Design Design Design Design Design Design Design Design (A,B,C,(A,B,C,(A,B,C,(A,B,C,(A,B,C,(A,B,C,(A,B,C,(A,B,C,TTTTTTTT)))))))) jointlyjointlyjointlyjointlyjointlyjointlyjointlyjointlyControl: Control: Control: Control: Control: Control: Control: Control: CoupledCoupledCoupledCoupledCoupledCoupledCoupledCoupled ARE(ARE(ARE(ARE(ARE(ARE(ARE(ARE(ββββββββ))))))))
[Mullis/Roberts 76][Williamson 86][liu/Grigoriadis/Skelton 88][Gevers 92, Bamieh 94]
))(())((
eexxCCyyBuBueexxAAxx
++++++++========++++++++++++++++========δ
No Clue aboutNo Clue aboutNo Clue aboutNo Clue aboutNo Clue aboutNo Clue aboutNo Clue aboutNo Clue about Basis T Basis T Basis T Basis T Basis T Basis T Basis T Basis T From PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom PhysicsFrom Physicsxx vvvvvvvv

12
Hubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space TelescopeHubble Space Telescope•• Limited by controlLimited by control•• Improvement @ no costImprovement @ no costby unifying 2 disciplinesby unifying 2 disciplines
Using 24 bits:Using 24 bits: 100 times less (pointing variance)/(control energy)100 times less (pointing variance)/(control energy)UsingUsing 4 bits:4 bits: 10,000 times less ( “ )10,000 times less ( “ )
changechange existingexisting coefficients (no cost solution)coefficients (no cost solution)[IEEE TAC, Vol 37, No.9, 1992, JGCD, vol 18, No.2, 1995]

13
Optimal Mix of Plant/Control DesignOptimal Mix of Plant/Control Design[[GrigoriadisGrigoriadis, Zhu, , Zhu, SkeltonSkelton, 1992], 1992]
minmin E E E E E E E E u uu uu uu uu uu uu uu u
≤ ≤ ≤ ≤ ≤ ≤ ≤ ≤ YYYYYYYY
xxxxxxxx = = = = = = = = AAAAAAAA((((((((pppppppp))))))))xxxxxxxx + + + + + + + + BBBBBBBB((((((((pppppppp))))))))uuuuuuuu + + + + + + + + Dw Dw Dw Dw Dw Dw Dw Dw , , , , , , , , yyyyyyyy = = = = = = = = CxCxCxCxCxCxCxCx
........
Convex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, given YYYYYYYY
[A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + pppppppp MMMMMMMMiiiiiiii iiiiiiii
∑∑∑∑∑∑∑∑
pp iiiiii pppp ≤≤≤≤≤≤≤≤≤≤≤≤≤≤≤≤ ----------------
GuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteePerformancePerformancePerformancePerformancePerformancePerformancePerformancePerformance YYYYYYYY
TTTTTTTT
KKKKKKKK
EEEEEEEE y yy yy yy yy yy yy yy y TTTTTTTT

14
Optimal Mix of Plant/Control DesignOptimal Mix of Plant/Control Design[[GrigoriadisGrigoriadis, Zhu, , Zhu, SkeltonSkelton, 1992], 1992]
minmin
minmin E E E E E E E E u uu uu uu uu uu uu uu u
≤ ≤ ≤ ≤ ≤ ≤ ≤ ≤ YYYYYYYY
UpdateUpdateUpdateUpdateUpdateUpdateUpdateUpdatePlant Plant Plant Plant Plant Plant Plant Plant p,p,p,p,p,p,p,p,ControlControlControlControlControlControlControlControl KKKKKKKK
xxxxxxxx = = = = = = = = AAAAAAAA((((((((pppppppp))))))))xxxxxxxx + + + + + + + + BBBBBBBB((((((((pppppppp))))))))uuuuuuuu + + + + + + + + Dw Dw Dw Dw Dw Dw Dw Dw , , , , , , , , yyyyyyyy = = = = = = = = CxCxCxCxCxCxCxCx
........
Not ConvexNot ConvexNot ConvexNot ConvexNot ConvexNot ConvexNot ConvexNot Convex
Convex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, given YYYYYYYY
[A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + pppppppp MMMMMMMMiiiiiiii iiiiiiii
∑∑∑∑∑∑∑∑
pp iiiiii pppp ≤≤≤≤≤≤≤≤≤≤≤≤≤≤≤≤ ----------------
GuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteePerformancePerformancePerformancePerformancePerformancePerformancePerformancePerformance YYYYYYYY
E E E E E E E E u uu uu uu uu uu uu uu uTTTTTTTT
TTTTTTTT
p,p,p,p,p,p,p,p, KKKKKKKK
KKKKKKKK
EEEEEEEE y yy yy yy yy yy yy yy y TTTTTTTT
EEEEEEEE y y y y y y y y y y y y y y y y YYYYYYYY≤≤≤≤≤≤≤≤TTTTTTTT

15
Optimal Mix of Plant/Control DesignOptimal Mix of Plant/Control Design[[GrigoriadisGrigoriadis, Zhu, , Zhu, SkeltonSkelton, 1992], 1992]
minmin
minmin E E E E E E E E u uu uu uu uu uu uu uu u
≤ ≤ ≤ ≤ ≤ ≤ ≤ ≤ YYYYYYYY
UpdateUpdateUpdateUpdateUpdateUpdateUpdateUpdatePlant Plant Plant Plant Plant Plant Plant Plant p,p,p,p,p,p,p,p,ControlControlControlControlControlControlControlControl KKKKKKKK
xxxxxxxx = = = = = = = = AAAAAAAA((((((((pppppppp))))))))xxxxxxxx + + + + + + + + BBBBBBBB((((((((pppppppp))))))))uuuuuuuu + + + + + + + + Dw Dw Dw Dw Dw Dw Dw Dw , , , , , , , , yyyyyyyy = = = = = = = = CxCxCxCxCxCxCxCx
........
Convex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, given XXXXXXXX
Convex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, givenConvex, given YYYYYYYY
[A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + [A B] = M + pppppppp MMMMMMMMiiiiiiii iiiiiiii
∑∑∑∑∑∑∑∑
pp iiiiii pppp ≤≤≤≤≤≤≤≤≤≤≤≤≤≤≤≤ ----------------
GuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteeGuaranteePerformancePerformancePerformancePerformancePerformancePerformancePerformancePerformance YYYYYYYY
E E E E E E E E u uu uu uu uu uu uu uu uTTTTTTTT
ComputeComputeComputeComputeComputeComputeComputeCompute EEEEEEEE xxxxxxxxxxxxxxxx ======== XXXXXXXXwherewherewherewherewherewherewherewhere CCCCCCCCXXXXXXXXC C C C C C C C Y Y Y Y Y Y Y Y
TTTTTTTT
TTTTTTTT
TTTTTTTT
E E E E E E E E xxxxxxxxxxxxxxxx ======== XXXXXXXXTTTTTTTTp,p,p,p,p,p,p,p, KKKKKKKK
KKKKKKKK
≤≤≤≤≤≤≤≤
EEEEEEEE y yy yy yy yy yy yy yy y TTTTTTTT

16
Optimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/ControlOptimal Mass/Damping/Stiffness/Control5 stories5 stories5 stories5 stories5 stories5 stories5 stories5 stories
TendonTendonTendonTendonTendonTendonTendonTendonControlControlControlControlControlControlControlControl
ControlControlControlControlearthquakeearthquakeearthquakeearthquakeearthquakeearthquakeearthquakeearthquake
L2 L2 L2 L2 L2 L2 L2 L2 < 1< 1< 1< 1< 1< 1< 1< 1[Lu, Skelton, Computer Aided Civil Infrastructure Engr, vol 13, 1998]
Less Mass More Less Mass More Less Mass More Less Mass More Less Mass More Less Mass More Less Mass More Less Mass More PerformancePerformancePerformancePerformancePerformancePerformancePerformancePerformance
Y<10Y<10Y<10Y<10Y<10Y<10Y<10Y<10
Y<1000Y<1000Y<1000Y<1000Y<1000Y<1000Y<1000Y<1000
More ActuatorsMore ActuatorsMore ActuatorsMore ActuatorsMore ActuatorsMore ActuatorsMore ActuatorsMore Actuators

17
Optimal Mix of Physics/Information, Optimal Mix of Physics/Information, Structures/ControlStructures/Control
Most structure, least actuatorsMost structure, least actuatorsMost structure, least actuatorsMost structure, least actuatorsMost structure, least actuatorsMost structure, least actuatorsMost structure, least actuatorsMost structure, least actuators
less structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuators
less structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuatorsless structure, more actuators
Control Energy,
actuators
structuremass
••OptimalOptimalOptimalOptimalOptimalOptimalOptimalOptimal Number Number Number Number Number Number Number Number ActuatorsActuatorsActuatorsActuatorsActuatorsActuatorsActuatorsActuators•• Less energy, more robustLess energy, more robustLess energy, more robustLess energy, more robustLess energy, more robustLess energy, more robustLess energy, more robustLess energy, more robust•• More complex controllerMore complex controllerMore complex controllerMore complex controllerMore complex controllerMore complex controllerMore complex controllerMore complex controller•• Avoiding integer program……Avoiding integer program……Avoiding integer program……Avoiding integer program……Avoiding integer program……Avoiding integer program……Avoiding integer program……Avoiding integer program……
≤≤≤≤2222ySubject toSubject toSubject toSubject to YYYYYYYY

18
The Economic Design ProblemThe Economic Design ProblemThe Economic Design ProblemThe Economic Design ProblemThe Economic Design ProblemThe Economic Design ProblemThe Economic Design ProblemThe Economic Design Problem
zzzzzzzzWWWWWWWW noisenoisenoisenoisenoisenoisenoisenoise
ZEzzWwEw
ZW
Tjkkj ========
====
,δδδδ
σσσσσσσσ
Finite SignalFinite SignalFinite SignalFinite SignalFinite SignalFinite SignalFinite SignalFinite Signal--------totototototototo--------Noise ratioNoise ratioNoise ratioNoise ratioNoise ratioNoise ratioNoise ratioNoise ratio
$ = $ = $ = $ = $ = $ = $ = $ = ∑∑∑∑ −−−−
iiip 1σσσσσσσσ
Min Min Min Min Min Min Min Min $$$$$$$$ , subject to , subject to , subject to , subject to , subject to , subject to , subject to , subject to yy yy yy yy yy yy yy yy < < < < < < < < Y Y Y Y Y Y Y Y TTTTTTTTEσ, σ, σ, σ, σ, σ, σ, σ, KKKKKKKK
σσσσσσσσ --------11111111
11111111> >> >> >> >> >> >> >> > σσσσσσσσ --------11111111
22222222IfIfIfIfIfIfIfIf , , , , , , , , then delete sensor 2, or then delete sensor 2, or then delete sensor 2, or then delete sensor 2, or then delete sensor 2, or then delete sensor 2, or then delete sensor 2, or then delete sensor 2, or
offoffoffoffoffoffoffoff--------thethethethethethethethe--------shelfshelfshelfshelfshelfshelfshelfshelf
Sensor, Actuator,Sensor, Actuator,Sensor, Actuator,Sensor, Actuator,Sensor, Actuator,Sensor, Actuator,Sensor, Actuator,Sensor, Actuator,DSP channelDSP channelDSP channelDSP channelDSP channelDSP channelDSP channelDSP channel
Control KControl KControl KControl KControl KControl KControl KControl K
[Lu, Skelton, Automatica, to appear]
Convergent algorithm, but no globalConvergent algorithm, but no globalConvergent algorithm, but no globalConvergent algorithm, but no globalConvergent algorithm, but no globalConvergent algorithm, but no globalConvergent algorithm, but no globalConvergent algorithm, but no global

19
OutlineOutline
•• Designing Designing SystemsSystems•• Designing Designing Models for SystemsModels for Systems•• Inspirations FromInspirations From
•• Designing Designing Controlled StructuresControlled Structures

20
Component ModelingComponent Modeling
ζζζζζζζζ
= Φ (ζ)Φ (ζ)Φ (ζ)Φ (ζ)Φ (ζ)Φ (ζ)Φ (ζ)Φ (ζ)((((((((ζζζζζζζζ,µµµµµµµµ
wwwwwwwwuuuuuuuu
Component Component Component Component Component Component Component Component
Model Model Model Model MMMMModel Model Model Model Model Model Model Model MMMMMMMM
uuuuuuuueeeeeeee
wwwwwwww ++--
••FromFromFromFromFromFromFromFrom physics, physics, physics, physics, physics, physics, physics, physics, ChooseChooseChooseChooseChooseChooseChooseChoose Φ Φ Φ Φ Φ Φ Φ Φ for smallfor smallfor smallfor smallfor smallfor smallfor smallfor small eeeeeeee
••FromFromFromFromFromFromFromFrom systems systems systems systems systems systems systems systems criteria,criteria,criteria,criteria,criteria,criteria,criteria,criteria,ChooseChooseChooseChooseChooseChooseChooseChoose ΦΦΦΦΦΦΦΦ to depend onto depend onto depend onto depend onto depend onto depend onto depend onto depend on u,wu,wu,wu,wu,wu,wu,wu,w
[Hu/Skelton, Computers and Structures,1985]
x = x = x = x = x = x = x = x = T T T T T T T T vvvvvvvvv(t)v(t)v(t)v(t)v(t)v(t)v(t)v(t)t)t)t)t)t)t)t)t)
Choose Choose Choose Choose Choose Choose Choose Choose T T T T T T T T to depend onto depend onto depend onto depend onto depend onto depend onto depend onto depend on w(w(w(w(w(w(w(w(bbbbbbbb))))))))recallrecallrecallrecallrecallrecallrecallrecall

21
Is System Modeling Just Is System Modeling Just Physics, Physics? Physics, Physics? Or can Mother Nature be fooled?Or can Mother Nature be fooled?
Plant PPlant PPlant PPlant PPlant PPlant PPlant PPlant P
Model Model Model Model MMMMModel Model Model Model Model Model Model Model MMMMMMMM
uuuuuuuu
Controller Controller Controller Controller CCCC((((MMMM))))Controller Controller Controller Controller Controller Controller Controller Controller CCCCCCCC((((((((MMMMMMMM))))))))
eeeeeeee
wwwwwwwwuuuuuuuu)ωjM (
)ωjP (
∫∫∫∫== uyM )C(NNCPC )( ++++ dt8())( 22
physicsphysics
++
--
[Yousuff, 85]
PPPPPPPP = = = = = = = = MMMMMMMM + + + + + + + + MMMMMMMM∆Desired focusDesired focusDesired focusDesired focusDesired focusDesired focusDesired focusDesired focus
Robust Control TheoryRobust Control TheoryRobust Control TheoryRobust Control TheoryRobust Control TheoryRobust Control TheoryRobust Control TheoryRobust Control Theory
NN////////
yyyyyyyy
( j ω )

22
Control Models : How Much Info is Really Control Models : How Much Info is Really Necessary?Necessary?
1,.....,2,1,0,OnlyOnlyRequiresRequires
,
)(
1
1
−=
=+=
+
+
=∑
NiBCACAControllerOptimal
Theorem
CxyBuAxxtoSubject
RuuQyyMinimize
i
kkkkk
kTk
N
kk
Tk
••Only Errors in Affect Control PerformanceOnly Errors in Affect Control PerformanceOnly Errors in Affect Control PerformanceOnly Errors in Affect Control PerformanceOnly Errors in Affect Control PerformanceOnly Errors in Affect Control PerformanceOnly Errors in Affect Control PerformanceOnly Errors in Affect Control Performance••Any QMC from data yields the optimal controlAny QMC from data yields the optimal controlAny QMC from data yields the optimal controlAny QMC from data yields the optimal controlAny QMC from data yields the optimal controlAny QMC from data yields the optimal controlAny QMC from data yields the optimal controlAny QMC from data yields the optimal control••Why compute Why compute Why compute Why compute Why compute Why compute Why compute Why compute Markov Markov Markov Markov Markov Markov Markov Markov Parameters, Use Data DirectlyParameters, Use Data DirectlyParameters, Use Data DirectlyParameters, Use Data DirectlyParameters, Use Data DirectlyParameters, Use Data DirectlyParameters, Use Data DirectlyParameters, Use Data Directly
BCA i
[Shi, Skelton, DATA-BASED CONTROL, ‘94], [Furuta, ‘93], [Ikeda, ‘99]

23
Does there exist any linear model to Does there exist any linear model to Does there exist any linear model to Does there exist any linear model to Does there exist any linear model to Does there exist any linear model to Does there exist any linear model to Does there exist any linear model to Match Match Match Match Match Match Match Match the the the the the the the the inputinputinputinputinputinputinputinput////////outputoutputoutputoutputoutputoutputoutputoutput data?data?data?data?data?data?data?data?
ActualActualActualActualActualActualActualActualPlantPlantPlantPlantPlantPlantPlantPlant
LinearLinearLinearLinearLinearLinearLinearLinearModelModelModelModelModelModelModelModel
yyyyyyyyuuuuuuuu
========
========
================ ++++++++++++++++
00112233
001122
0011
00
00112233
11001122
22110011
33221100
000000000000
,,
,,
HHHHHHHHHHHHHH
HHHHHH
HH
RRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRR
RR
uuEEyyHHyyEEyyRR
TT
TTTT
TTTTTT
TTkkiikkii
TTkkiikkii
00≥≥≥≥≥≥≥≥−−−−−−−− TTHHHHRRIFFIFFIFFIFFIFFIFFIFFIFF
Many Many Many Many Many Many Many Many Models Equivalent to the One FromModels Equivalent to the One FromModels Equivalent to the One FromModels Equivalent to the One FromModels Equivalent to the One FromModels Equivalent to the One FromModels Equivalent to the One FromModels Equivalent to the One From PhysicsPhysicsPhysicsPhysicsPhysicsPhysicsPhysicsPhysics
Data Equivalent ModelsData Equivalent ModelsData Equivalent ModelsData Equivalent ModelsData Equivalent ModelsData Equivalent ModelsData Equivalent ModelsData Equivalent Models[Skelton, Zhu, Qmarkov COVER, 1991]

24
Absentee: A Absentee: A SystemSystem Modeling TheoryModeling Theory•• The size of the error is The size of the error is Not ContinuousNot Continuous from from Component (OL)Component (OL)
to to SSystemystem (CL) (CL) –– Unbounded Unbounded OL OL error, but zero error, but zero CL CL errorerror–– Smaller Smaller OLOL errors smaller errors smaller CLCL errors. Hence….errors. Hence….
•• Good Component Models Good System ModelsGood Component Models Good System Models–– There might exist a There might exist a BBetteretter model for System Design than the model for System Design than the AActual ctual
model from physics. model from physics. –– Bad News:Bad News: Investments in Component Modeling may Not Help Investments in Component Modeling may Not Help
System ModelingSystem Modeling–– Good News:Good News: Good System Models can be Simpler Than Component Good System Models can be Simpler Than Component
Models (Yes, There Exists an Optimal Size)Models (Yes, There Exists an Optimal Size)
•• Should control design occur Should control design occur Before, After, Before, After, oror DuringDuring plant plant modeling?modeling?

25
The Best The Best SystemSystem ModelModel
BestBestBestBestBestBestBestBestStructuresStructuresStructuresStructuresStructuresStructuresStructuresStructures
ModelModelModelModelModelModelModelModel
BestBestBestBestBestBestBestBestFluidsFluidsFluidsFluidsFluidsFluidsFluidsFluidsModelModelModelModelModelModelModelModel
BestBestBestBestBestBestBestBestOptics Optics Optics Optics Optics Optics Optics Optics ModelModelModelModelModelModelModelModel
Best Best Best Best Best Best Best Best MaterialsMaterialsMaterialsMaterialsMaterialsMaterialsMaterialsMaterials ModelModelModelModelModelModelModelModel
Best Best Best Best Best Best Best Best
SystemSystemSystemSystemSystemSystemSystemSystemModelModelModelModelModelModelModelModel
••May have little to do with the bestMay have little to do with the best Component ModelComponent Model

26
OutlineOutline
•• Designing Designing SystemsSystems•• Designing Designing Models for SystemsModels for Systems•• Inspirations FromInspirations From
•• Designing Designing Controlled StructuresControlled Structures

27
Integrating Material, Structure, ControlIntegrating Material, Structure, Control•• The Theory of The Theory of CContinuaontinua is inadequate to account for the is inadequate to account for the
strength of materials. strength of materials. •• Challenge for ManChallenge for Man--made Systems: made Systems: ArchitectureArchitecture
–– Information ArchitectureInformation Architecture: selection of sensors, actuators, and : selection of sensors, actuators, and feedback paths. feedback paths.
–– Material Architecture:Material Architecture: selection of the material geometryselection of the material geometry
•• Look to Look to BiologicalBiological andand NaturalNatural systems, wheresystems, where–– Mechanical, Chemical, and Electrical forces are involved in Mechanical, Chemical, and Electrical forces are involved in
complex patterns of information flow, sensing, and feedbackcomplex patterns of information flow, sensing, and feedback

Inspiration From ArtInspiration From ArtInspiration From ArtInspiration From ArtInspiration From ArtInspiration From ArtInspiration From ArtInspiration From Art
Kenneth Kenneth Kenneth Kenneth Kenneth Kenneth Kenneth Kenneth SnelsonSnelsonSnelsonSnelsonSnelsonSnelsonSnelsonSnelsonNeedle Tower, 1968Needle Tower, 1968Needle Tower, 1968Needle Tower, 1968Needle Tower, 1968Needle Tower, 1968Needle Tower, 1968Needle Tower, 1968KrollerKrollerKrollerKrollerKrollerKrollerKrollerKroller Muller MuseumMuller MuseumMuller MuseumMuller MuseumMuller MuseumMuller MuseumMuller MuseumMuller MuseumThe NetherlandsThe NetherlandsThe NetherlandsThe NetherlandsThe NetherlandsThe NetherlandsThe NetherlandsThe Netherlands
After 30 Years of After 30 Years of After 30 Years of After 30 Years of After 30 Years of After 30 Years of After 30 Years of After 30 Years of •• Forcing Continua Forcing Continua Forcing Continua Forcing Continua Forcing Continua Forcing Continua Forcing Continua Forcing Continua •• Adding Actuators to Adding Actuators to Adding Actuators to Adding Actuators to Adding Actuators to Adding Actuators to Adding Actuators to Adding Actuators to
Old Paradigms: Old Paradigms: Old Paradigms: Old Paradigms: Old Paradigms: Old Paradigms: Old Paradigms: Old Paradigms: Beams, Plates, ShellsBeams, Plates, ShellsBeams, Plates, ShellsBeams, Plates, ShellsBeams, Plates, ShellsBeams, Plates, ShellsBeams, Plates, ShellsBeams, Plates, Shells
Eureka !!!!Eureka !!!!Eureka !!!!Eureka !!!!Eureka !!!!Eureka !!!!Eureka !!!!Eureka !!!!••No JointsNo JointsNo JointsNo JointsNo JointsNo JointsNo JointsNo Joints••No Load ReversalsNo Load ReversalsNo Load ReversalsNo Load ReversalsNo Load ReversalsNo Load ReversalsNo Load ReversalsNo Load Reversals••No FrictionNo FrictionNo FrictionNo FrictionNo FrictionNo FrictionNo FrictionNo Friction••No Member BendingNo Member BendingNo Member BendingNo Member BendingNo Member BendingNo Member BendingNo Member BendingNo Member Bending••Easy to Change EquilibriumEasy to Change EquilibriumEasy to Change EquilibriumEasy to Change EquilibriumEasy to Change EquilibriumEasy to Change EquilibriumEasy to Change EquilibriumEasy to Change Equilibrium““““““““TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity” ” ” ” ” ” ” ”
= Tension + Integrity= Tension + Integrity= Tension + Integrity= Tension + Integrity= Tension + Integrity= Tension + Integrity= Tension + Integrity= Tension + Integrity

29IngberIngber, 98, 98Scientific AmericanScientific American

30
Carbon Carbon Carbon Carbon Carbon Carbon Carbon Carbon NanotubesNanotubesNanotubesNanotubesNanotubesNanotubesNanotubesNanotubes, , , , , , , , FullerenesFullerenesFullerenesFullerenesFullerenesFullerenesFullerenesFullerenes
Strength From GeometryStrength From GeometryStrength From GeometryStrength From GeometryStrength From GeometryStrength From GeometryStrength From GeometryStrength From Geometry
[Yakobson, Smalley, American Scientist,July 97]
SmalleySmalleySmalleySmalleySmalleySmalleySmalleySmalley, 1996 Nobel Prize, 1996 Nobel Prize, 1996 Nobel Prize, 1996 Nobel Prize, 1996 Nobel Prize, 1996 Nobel Prize, 1996 Nobel Prize, 1996 Nobel Prize

31
GeometryGeometryGeometryGeometryGeometryGeometryGeometryGeometrymechanical properties,mechanical properties,mechanical properties,mechanical properties,mechanical properties,mechanical properties,mechanical properties,mechanical properties,electrical propertieselectrical propertieselectrical propertieselectrical propertieselectrical propertieselectrical propertieselectrical propertieselectrical properties[Yakobson, Smalley, American Scientist,July 97]
BuckyballsBuckyballsBuckyballsBuckyballsBuckyballsBuckyballsBuckyballsBuckyballs andandandandandandandand FullerenesFullerenesFullerenesFullerenesFullerenesFullerenesFullerenesFullerenes

32
Learning f rom Natural SystemsLearning f rom Natural SystemsLearning f rom Natural SystemsLearning f rom Natural SystemsLearning f rom Natural SystemsLearning f rom Natural SystemsLearning f rom Natural SystemsLearning f rom Natural Systems
S p id er F ib er :S p id er F ib er :S p id er F ib er :S p id er F ib er :
A A A A A A A A Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Found in Nature,Found in Nature,Found in Nature,Found in Nature,Found in Nature,Found in Nature,Found in Nature,Found in Nature,
Spider Fiber: Spider Fiber: Spider Fiber: Spider Fiber: Spider Fiber: Spider Fiber: Spider Fiber: Spider Fiber: Nature’s StrongestNature’s StrongestNature’s StrongestNature’s StrongestNature’s StrongestNature’s StrongestNature’s StrongestNature’s Strongest
AminAminAminAminAminAminAminAmino Acids:o Acids:o Acids:o Acids:o Acids:o Acids:o Acids:o Acids:Discontinuous compressiveDiscontinuous compressiveDiscontinuous compressiveDiscontinuous compressiveDiscontinuous compressiveDiscontinuous compressiveDiscontinuous compressiveDiscontinuous compressive
Continuous tensionContinuous tensionContinuous tensionContinuous tensionContinuous tensionContinuous tensionContinuous tensionContinuous tension
What’s in Common?What’s in Common?FullerenesFullerenes, , Spider fiberSpider fiberCellCell CytoskeletonCytoskeletonSnelson’s ArtformSnelson’s Artform
TensegrityTensegrity topologytopology

33
OutlineOutline
•• Designing Designing SystemsSystems•• Designing Designing Models for SystemsModels for Systems•• Inspirations FromInspirations From
•• Designing Designing Controlled StructuresControlled Structures

3435
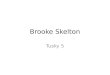
Definition: Definition: Definition: Definition: Definition: Definition: Definition: Definition: Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity SystemsSystemsSystemsSystemsSystemsSystemsSystemsSystems
C3T3, Class CC3T3, Class C C2T4, Class DC2T4, Class D
t 1
t 2
t 4
t3
2 N Points form a 2 N Points form a 2 N Points form a 2 N Points form a 2 N Points form a 2 N Points form a 2 N Points form a 2 N Points form a Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity GeometryGeometryGeometryGeometryGeometryGeometryGeometryGeometry if the set of Pointsif the set of Pointsif the set of Pointsif the set of Pointsif the set of Pointsif the set of Pointsif the set of Pointsif the set of Pointsare are are are are are are are stabilizable stabilizable stabilizable stabilizable stabilizable stabilizable stabilizable stabilizable with with with with with with with with pretensionedpretensionedpretensionedpretensionedpretensionedpretensionedpretensionedpretensioned axially loadedaxially loadedaxially loadedaxially loadedaxially loadedaxially loadedaxially loadedaxially loadedmembers connecting the pointsmembers connecting the pointsmembers connecting the pointsmembers connecting the pointsmembers connecting the points, with no more than two members connecting the points, with no more than two members connecting the points, with no more than two members connecting the points, with no more than two compressive members attached to a Pointcompressive members attached to a Pointcompressive members attached to a Pointcompressive members attached to a Point
Class DClass DClass DClass D: Discontinuous Compressive Members: Discontinuous Compressive Members: Discontinuous Compressive Members: Discontinuous Compressive MembersClass CClass CClass CClass C: Continuous Compressive Members: Continuous Compressive Members: Continuous Compressive Members: Continuous Compressive Members
3D: No 3D: No 3D: No 3D: No 3D: No 3D: No 3D: No 3D: No TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity System System System System System System System System TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity SystemSystemSystemSystemSystemSystemSystemSystem

35
A A Tensegrity Tensegrity GeometryGeometry(To Form A Tube)(To Form A Tube)
Points Not in a PlanePoints Not in a PlanePoints Not in a PlanePoints Not in a PlanePoints Not in a PlanePoints Not in a PlanePoints Not in a PlanePoints Not in a Plane

36
A A Tensegrity Tensegrity SystemSystem

37
A A Tensegrity Tensegrity SystemSystem
3 3 3 3 3 3 3 3 LocalLocalLocalLocalLocalLocalLocalLocal Parameters + Equilibrium ConstraintParameters + Equilibrium ConstraintParameters + Equilibrium ConstraintParameters + Equilibrium ConstraintParameters + Equilibrium ConstraintParameters + Equilibrium ConstraintParameters + Equilibrium ConstraintParameters + Equilibrium Constraint
Symmetric Geometry:Symmetric Geometry:Symmetric Geometry:Symmetric Geometry:Symmetric Geometry:Symmetric Geometry:Symmetric Geometry:Symmetric Geometry: 22222222 Free ParametersFree ParametersFree ParametersFree ParametersFree ParametersFree ParametersFree ParametersFree Parameters

38Structural Systems and Control LaboratorySchool of Engineering, UCSD
Shell Class of Shell Class of Shell Class of Shell Class of Shell Class of Shell Class of Shell Class of Shell Class of Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity SystemsSystemsSystemsSystemsSystemsSystemsSystemsSystems
A A
B BC C
D D
V
SD

Structural Systems and Control LaboratorySchool of Engineering, UCSD
Shell ClassShell ClassShell ClassShell ClassShell ClassShell ClassShell ClassShell Class TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity StructuresStructuresStructuresStructuresStructuresStructuresStructuresStructures
α ( d e g re e s ) δ ( d e g re e s )
Ov
erl
ap
h (
% o
f s
tag
e h
eig
ht)
t = 0V e r t ic a l s t r in g s
O v e r la p = 1 0 0 %
O v e r la p = 0 %
δ = 9 00

Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity GeometryGeometryGeometryGeometryGeometryGeometryGeometryGeometry
,,
FF FFTT ======== 0 0
hh(( ,, ,, ))αααααααα δδδδδδδδ ========
TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity GeometryGeometryGeometryGeometryGeometryGeometryGeometryGeometry[Skelton, Helton, Adhikari, 1998], [Sultan/Skelton, 1998]
h
L L L Lt t
=+
− + +
+ − +
12 6
3 6 3 3 62
2 2 2
tan cos
sin cos sin cos
δδδδ αααα π
δδδδ αααα π δδδδ αααα π
SS hh L L LL
VV L L LL
DD L L hh Lh LL
t t
t t
t t
= + + − + +
= + − +
= + + − −
2 2 2 2
2 2
2 2 2
32
3 6
2 6
3 2 23
sin sin sin cos
sin sin
cos sin sin
δδδδδδδδ δδδδδδδδ αααααααα αααααααα π
δδδδδδδδ αααααααα π
δδδδδδδδ δδδδδδδδ αααααααα
FF hh tt(( ,, ,, ))αααααααα δδδδδδδδ ======== 0,0, tt > > > > > > > > 00Stable equilibriumStable equilibriumStable equilibriumStable equilibriumStable equilibriumStable equilibriumStable equilibriumStable equilibrium
•Pugh, 1976•Pelligrino, Calladine, 1986•Motro, 1986•Furuya, 1992•Coughlin, Stamenovic, 1997
•Skelton, 1993 - 1999 •Sultan, 1996,1997, 1998, 1999•Oppenheim, 1998•Williamson, Skelton, 1999

41
TensegrityTensegrity Paradigm for Structural ControlParadigm for Structural Control
••Changing the Shape With Less Control EnergyChanging the Shape With Less Control EnergyChanging the Shape With Less Control EnergyChanging the Shape With Less Control EnergyChanging the Shape With Less Control EnergyChanging the Shape With Less Control EnergyChanging the Shape With Less Control EnergyChanging the Shape With Less Control Energy••Construct a Construct a Construct a Construct a Construct a Construct a Construct a Construct a Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity GeometryGeometryGeometryGeometryGeometryGeometryGeometryGeometry with a with a with a with a with a with a with a with a specifiedspecifiedspecifiedspecifiedspecifiedspecifiedspecifiedspecified shapeshapeshapeshapeshapeshapeshapeshape••Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the Actuate the tendons (rest lengths) to avoid straining the structure, moving from one equilibrium to anotherstructure, moving from one equilibrium to anotherstructure, moving from one equilibrium to anotherstructure, moving from one equilibrium to anotherstructure, moving from one equilibrium to anotherstructure, moving from one equilibrium to anotherstructure, moving from one equilibrium to anotherstructure, moving from one equilibrium to another

42
Shape Control with Shape Control with Tensegrity Tensegrity TheoremTheoremTheoremTheoremTheoremTheoremTheoremTheorem [ 99]
Let Let Let Let Let Let Let Let q1, q2q1, q2q1, q2q1, q2q1, q2q1, q2q1, q2q1, q2 be two be two be two be two be two be two be two be two tensegritytensegritytensegritytensegritytensegritytensegritytensegritytensegrity geometriesgeometriesgeometriesgeometriesgeometriesgeometriesgeometriesgeometries, , , , , , , , associated with associated with associated with associated with associated with associated with associated with associated with the same the same the same the same the same the same the same the same nullspacenullspacenullspacenullspacenullspacenullspacenullspacenullspace of of of of of of of of FFFFFFFF((((((((qqqqqqqq). Then,). Then,). Then,). Then,). Then,). Then,). Then,). Then,••There exists a continuum of There exists a continuum of There exists a continuum of There exists a continuum of There exists a continuum of There exists a continuum of There exists a continuum of There exists a continuum of tensegrity geometriestensegrity geometriestensegrity geometriestensegrity geometriestensegrity geometriestensegrity geometriestensegrity geometriestensegrity geometriesbetween between between between between between between between q1q1q1q1q1q1q1q1 and and and and and and and and q2q2q2q2q2q2q2q2........••There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from There exist tendon controls to change the geometry from q1q1q1q1q1q1q1q1 to to to to to to to to q2q2q2q2q2q2 q2q2 without changing potential energy. without changing potential energy. without changing potential energy. without changing potential energy. without changing potential energy. without changing potential energy. without changing potential energy. without changing potential energy.
))(())(())(())((
)))()((())))(())((((
11
uuRRqquuRRqqqqKRKRuuRRqquuRRqqKKuu
DwDwvvuuqqBBqqqqKKqqKKqq
TT
TT
pprr
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−========
++++++++++++++++========++++++++++++++++
••••••••−−−−−−−−••••••••
••••••••••••••••••••••••
RRqq >>>>>>>> uu,,,,,,,,

43
Controlling (Torturing) StructuresControlling (Torturing) Structures
SMA torque tubeSMA torque tubeSMA torque tubeSMA torque tubeSMA torque tubeSMA torque tubeSMA torque tubeSMA torque tube
•• Existing approach: (Existing approach: (Existing approach: (Existing approach: (Existing approach: (Existing approach: (Existing approach: (Existing approach: (DARPA SMART WINGDARPA SMART WINGDARPA SMART WINGDARPA SMART WINGDARPA SMART WINGDARPA SMART WINGDARPA SMART WINGDARPA SMART WING))))))))•• Design Control Design Control Design Control Design Control Design Control Design Control Design Control Design Control AfterAfterAfterAfterAfterAfterAfterAfter Structure Structure Structure Structure Structure Structure Structure Structure •• Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This Twist the structure against it’s equilibrium. This requires work (requires work (requires work (requires work (requires work (requires work (requires work (requires work (77777777 deg deg deg deg deg deg deg deg limit, limit, limit, limit, limit, limit, limit, limit, 2020202020202020 degdegdegdegdegdegdegdeg desired)desired)desired)desired)desired)desired)desired)desired)
•• New Paradigm: Unify New Paradigm: Unify New Paradigm: Unify New Paradigm: Unify New Paradigm: Unify New Paradigm: Unify New Paradigm: Unify New Paradigm: Unify at more fundamental levelat more fundamental levelat more fundamental levelat more fundamental levelat more fundamental levelat more fundamental levelat more fundamental levelat more fundamental level••Change shape by changing the equilibrium Change shape by changing the equilibrium Change shape by changing the equilibrium Change shape by changing the equilibrium Change shape by changing the equilibrium Change shape by changing the equilibrium Change shape by changing the equilibrium Change shape by changing the equilibrium

44
strengthTensile
iiEbbbbbbbb
mmi
====
++++====
bbbbbbbb====
∑∑∑∑ ==== −−−−
σσσσδδδδσσσσ
δδδδππππmB2j 1j2
20
0
))(cos
1()(tan
Minimal Mass Minimal Mass Minimal Mass Minimal Mass Minimal Mass Minimal Mass Minimal Mass Minimal Mass Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity Tensegrity StructuresStructuresStructuresStructuresStructuresStructuresStructuresStructures
mB5 )cos2( 2
ii−−−−δδδδ=
1 2 3 4 5 6 70.2
0.4
0.8
L=20L=25
L=15
b b b b b b b b vs vs vs vs vs vs vs vs i i i i i i i i iiiiiiii
δ = 10 δ = 10 δ = 10 δ = 10

45
StiffnessStiffness--toto--Mass Ratio of C4T1Mass Ratio of C4T1Theorem Theorem The The compressivecompressive stiffness of the stiffness of the C4T1 C4T1 Structure is equal to Structure is equal to the the tensiletensile stiffness of the tendons of the shortest tendonsstiffness of the tendons of the shortest tendons
•• Controlling the tension of the Controlling the tension of the shortest tendonshortest tendon controls the controls the compressive stiffness of the entire structurecompressive stiffness of the entire structure
•• All compressive members carry the same loadAll compressive members carry the same load•• Infinite buckling strength for finite Infinite buckling strength for finite ii•• minimal mass occurs at smaller minimal mass occurs at smaller i i than infinite strengththan infinite strength
ii
iiiiiiii

46
Advantages of The Advantages of The TensegrityTensegrity ParadigmParadigm•• All Members Axially LoadedAll Members Axially Loaded
– Global bending without member bending
•• All MembersAll Members UniUni--Directionally Loaded (Pretension)Directionally Loaded (Pretension)– No reversal of load direction (no friction, hysteresis)
•• Structural EfficiencyStructural Efficiency– Strength to mass very high– Inspired by Art and Biological forms
• Easy to Integrate Structure/ControlEasy to Integrate Structure/Control– More accurate models (hence more precise control)– A structural member also serves as sensor, actuator– Actuator/Sensor architecture easily optimized– Change shape with little work (one equilibrium to another)

47
TwoTwoTwoTwoTwoTwoTwoTwo--------Stage Stage Stage Stage Stage Stage Stage Stage TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity: : : : : : : : Tendon ControlTendon ControlTendon ControlTendon ControlTendon ControlTendon ControlTendon ControlTendon Control
Controlled tendonsControlled tendonsControlled tendonsControlled tendonsControlled tendonsControlled tendonsControlled tendonsControlled tendonsDC MotorsDC MotorsDC MotorsDC MotorsDC MotorsDC MotorsDC MotorsDC Motors

Structural Systems and Control LaboratorySchool of Engineering, UCSD
DeployableDeployableDeployableDeployableDeployableDeployableDeployableDeployable TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity Heat ShieldHeat ShieldHeat ShieldHeat ShieldHeat ShieldHeat ShieldHeat ShieldHeat Shield

49
SingleSingleSingleSingleSingleSingleSingleSingle--------Stage Stage Stage Stage Stage Stage Stage Stage TensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrityTensegrity: Pneumatic: Pneumatic: Pneumatic: Pneumatic: Pneumatic: Pneumatic: Pneumatic: Pneumatic

50
TensegrityTensegrity Suspension for Disk DrivesSuspension for Disk Drives
compression memberscompression memberscompression memberscompression memberscompression memberscompression memberscompression memberscompression memberstension tension tension tension tension tension tension tension membersmembersmembersmembersmembersmembersmembersmembers
diskdiskdiskdiskdiskdiskdiskdisk

51
ConclusionsConclusionsTo Universities and funding agencies:To Universities and funding agencies:•• Give theGive the Soul of Control Soul of Control aa BodyBody: : System Design System Design •• Give Give Modeling Modeling a Purpose: a Purpose: Systems ModelingSystems Modeling•• FunctionFunction following following FormForm
–– Snelson’s Tensegrity ArtformSnelson’s Tensegrity Artform Inspires a New ParadigmInspires a New Paradigmto Integrate Mechanics, Structures, and Controlto Integrate Mechanics, Structures, and Control

52
ConclusionsConclusions•• AfterAfter Component Technologies mature, the next quantum Component Technologies mature, the next quantum
leap in technology must come from a scientific method to do leap in technology must come from a scientific method to do Interdisciplinary Interdisciplinary System DesignSystem Design
•• Why wait Why wait til til component maturity to invest in a scientific component maturity to invest in a scientific method formethod for Systems DesignSystems Design
•• The biggest challenge: The biggest challenge: System ModelingSystem Modeling•• System Design (and modeling) requires System Design (and modeling) requires moremore than than
communicating what each discipline communicating what each discipline already knowsalready knows•• We can exploit We can exploit biological material architecturebiological material architecture toto•• Suggest a Suggest a system design paradigmsystem design paradigm for designing to specific for designing to specific
materials, thermal, electrical, mechanical properties:materials, thermal, electrical, mechanical properties:

53
What Your What Your DataData Never Told YouNever Told You
•• Data is not Data is not InformationInformation•• InformationInformation is not is not KnowledgeKnowledge•• KnowledgeKnowledge is not is not UnderstandingUnderstanding•• UnderstandingUnderstanding is not is not WisdomWisdom
[Howard Garner, Harvard]