Embed Size (px)
DESCRIPTION
Synthesis for Test. Virendra Singh Indian Institute of Science Bangalore [email protected]. IEP on Digital System Synthesis @ IIT Kanpur. Testability. Objective Improve Controllability Observability Reduction in sequential depth Elimination of sequential loop. - PowerPoint PPT Presentation
Citation preview

Synthesis for Test
Virendra SinghIndian Institute of Science
IEP on Digital System Synthesis @ IIT Kanpur

Dec 21,2007 SfT@iitk 2
Testability
Objective
Improve
Controllability
Observability
Reduction in sequential depth
Elimination of sequential loop

Dec 21,2007 SfT@iitk 3
Sequential Depth Reduction - Allocation
Allocation Scheme
Enhance controllability and observability
Reduction in Sequential depth
Based on RT Architecture
Independent of Test Technology

Dec 21,2007 SfT@iitk 4
Controllability and Observability
a
bc
d
e
f
g
h
Lifetime table
Allocation 1
R1: a, c, g
R2: b, d, h
R3: e
R4: f

Dec 21,2007 SfT@iitk 5
Controllability and Observability
a
bc
d
e
f
g
h
Lifetime table
Allocation 2
R1: a, c,
R2: b, d
R3: e, f
R4: f, g

Dec 21,2007 SfT@iitk 6
Controllability and Observability
If any one of variable assigned to a register is a PI (PO) of the chip, this register is directly controlled (observed); if not, register can be accessed through other registers
Goal: To ensure that as many registers as possible in the implementation are assigned at least PI/PO
Each row of register must cover a PI/PO
TSR1: Whenever possible , allocate a register to at least one PI or PO

Dec 21,2007 SfT@iitk 7
Sequential Depth Reduction
SDFG
+1 +2
+3
0
1
a
2
b d e
c f
g
a
bc
d
e
f
g
Lifetime Table

Dec 21,2007 SfT@iitk 8
Sequential Depth ReductionTSR1 does not provide inform testability suggestions on module allocation and interconnect allocation
Register allocation using TSR1
R = { (a,c,g), (b,f), (d), (e)}
Two possible Module allocation
M1 ={(+1,3), (+2)}
M2 ={(+1,2), (+3)}

Dec 21,2007 SfT@iitk 9
Sequential Depth Reduction• M1 is preferred to save interconnect cost
• output of +2 is hard to observe
• An error effect needs to propagate through an additional register R2 before it can be observed
Dec 21,2007 SfT@iitk 10
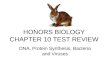
Sequential Depth Reduction
R1 R2
R4
R3
a b
d
e
g
R = { (a,f,g), (b,c), (d), (e)}
TSR2: Reduce the sequential depth from an input register to an output register

Dec 21,2007 SfT@iitk 11
Sequential Depth Reduction
R1 R2
R4
R3
a b
d
e
g
R = { (a,c,g), (b,f), (d), (e)}

Dec 21,2007 SfT@iitk 12
Sequential Loop Reduction
SDFG
+1
+3
+2
1
2
3
R1(d)4
R3(c)
R2(b)
R1(a)
R1
R3
R2
Sequential Loop:
Reuse of R1

Dec 21,2007 SfT@iitk 13
Sequential Loop Reduction
+1 +6 +7
+2
+8
+3
+4
x1 x2
a
6
x9
TIME 1
TIME 2
TIME 3
TIME 4
+5
y
e
b
f
g
c
dTIME 5

Dec 21,2007 SfT@iitk 14
Sequential Loop ReductionAllocscheme
Register Allocation Module allocation
#Mux
#loop
FC
A1 R1 =(x1,a), R2=(x4,e,b)R3= (x6,f,c), R4=(x7,d,g)R5= (x9,y)
(+1,4)(+2,3)(+3,7)(+5,8)
19 3 84
A2 R1 =(x6,e,b,c,d,y), R2=(x1,a)R3= (x4,f), R4=(x7,g)R5= (x9)
(+1,2)(+6)(+3,7)(+4,5,8)
16 0 100

Dec 21,2007 SfT@iitk 15
Sequential Loop Reduction
R1
R2
R5R3
R4
A1

Dec 21,2007 SfT@iitk 16
Sequential Loop Reduction
R1
R2
R5R3
R4
A2

Dec 21,2007 SfT@iitk 17
Scheduling for Sequential Depth/Loop Reduction
TSR3: Reduce Sequential loop by
Proper resource sharing to avoid creating sequential loops for cyclic DFG
Assign IO registers to break sequential loop
TSR4: Schedule operations to support the application of TSR1, TSR2, and TSR3

Dec 21,2007 SfT@iitk 18
Controllability
+
*-
a
R (b)
Primary input
R(c)
+ *
-
R(a)
R(b)
Primary input
R(c)
0
1
2
0
1
2
R = (b,c, …)
Not directly controllable
R = (a,b,c, …)
Directly controllable

Dec 21,2007 SfT@iitk 19
Observability
R2(z)
R1 = (….,w,x, …)
Not directly observable
+ *
-
t
t+1
t+2
*
R1(w)
R2(y)R1(x)
t+3
+
*-
t
t+1
t+2
*
R1(w)
R1(y)
R1(x)
t+3R1(z)

Dec 21,2007 SfT@iitk 20
Sequential Depth Reduction
R2(z)
*1
*2-
t
t+1
t+2
+
R1(w)
R2(y)
R1(x)
t+3
R2(v)R3(s)
R3(u)
R2(z)
*1 *2
-
t
t+1
t+2
+
R1(w)
R2(y)R1(x)
t+3
R2(v)
R3(s)
R3(u)

Dec 21,2007 SfT@iitk 21
Mobility Path
* * * +
*
*
* + <
--
1 2
3
4
5
6
7
8
9
10
11
TIME 1
TIME 2
TIME 3
TIME 4

Dec 21,2007 SfT@iitk 22
Mobility Path
* *
*
+
-
-
TIME 1
TIME 2
TIME 3
TIME 4

Dec 21,2007 SfT@iitk 23
Mobility Path SchedulingMobility_path_scheduling(G){
1. ASAP_scheduling(G);
2. ALAP_scheduling(G);
3. Update_op_slack_and_mobility(G);
4. While (unscheduled_op(G) ≠ 0){
5. Pk = next_min_mobility_path(G);
6. partial scheduling(Pk, G);
7. testMP(Pk, G); /analyze testability on Pk
8. }
9. }

Dec 21,2007 SfT@iitk 24
Mobility Path Schedulingpartial_scheduling(Pk,G){
1. For each (operation o on Pk)
2. if (o.earliest = o.latest) // mobility becomes 0
3. o.active = o.earliest // assign schedule
4. Update_op_slack_and)mobility(G);
5. While (unscheduled_op (Pk) ≠ 0){
6. (o, o.ll_cycles) = next_op_with _least_no_light_load_cycles(Pk, G);
7. o.active = most_preferred_cycle(o.ll_cycles, G);




![Automatic Test Data Synthesis using UML …AUTOMATIC TEST DATA SYNTHESIS USING UML SEQUENCE DIAGRAMS the speciflcations [2]. System tests difier from unit and integration tests in](https://img.dokumen.tips/doc/110x75/5ec7c7f710564508ea5bb816/automatic-test-data-synthesis-using-uml-automatic-test-data-synthesis-using-uml.jpg)