Embed Size (px)
Citation preview

Abstract
In this paper symmetry and asymmetry of optimal solutions in symmetric structural
topology optimization problems are investigated, based on the choice of variables. A
group theory approach is used to formally define the symmetry of the structural prob-
lems. This approach allows the set of symmetric structures to be described and related
to the entire search space. It is shown that, given a symmetric problem with continu-
ous variables, an optimal symmetric solution (if any) necessarily exists. However, it
is shown that this does not hold for the discrete case. Finally a number of examples
are investigated to demonstrate the findings of the research.
Keywords: structural topology optimization, symmetric topology, asymmetric topol-
ogy, group theory, symmetry operation, truss topology optimization.
1 Introduction
In structural engineering discrete variable optimization is of great interest, given the
discrete nature of building components. Symmetry reduction of structural problems
is a well established technique for structural analysis. In the past several decades
the mathematical rigour of group theory has been applied to symmetric structural
problems [1], leading to the development of structural analysis techniques for dis-
crete structures. Bifurcation problems [2] of framework and latticed domes [3, 4]
are amongst the most widely studied of these problems. In static analysis, symmet-
ric frame structures [5, 6] have been studied using group theory symmetry reduction
techniques. Group theoretic methods combined with graph products have been devel-
oped Kaveh et al. [7] and Kaveh and Nikbakht [8]. Kangwai et al. [9] and Zingoni
[1] provide more complete reviews of the applications of symmetry tools and group
theory in structural mechanics problems.
1
Paper 236 Symmetry of Solutions in Discrete and Continuous Structural Topology Optimization J.N. Richardson1,2, S. Adriaenssens3, Ph. Bouillard1 and R. Filomeno Coelho1 1 BATir, Building, Architecture and Town Planning Faculty of Applied Sciences, Université Libre de Bruxelles, Brussels, Belgium 2 MEMC, Mechanics of Materials and Construction Faculty of Engineering Sciences, Vrije Universiteit Brussel, Brussels, Belgium 3 Department of Civil and Environmental Engineering Princeton University, Princeton NJ, USA
©Civil-Comp Press, 2012 Proceedings of the Eleventh International Conference on Computational Structures Technology, B.H.V. Topping, (Editor), Civil-Comp Press, Stirlingshire, Scotland

In numerous studies of symmetric discrete topology optimization the approach has
been to enforce symmetry artificially [10, 11]. These measures lead to significant
simplification of the problem by reducing the number of design variables. The con-
sequent reduction in the problem size and hence the computational costs, are strong
motivating factors for this approach. However, as will be seen, in discrete topology
optimization this simplification often leads to strongly suboptimal solutions. The au-
thors were motivated to undertake this research on the basis of the results of symmetric
discrete topology optimization problems. However, a recent paper by Stolpe [12] il-
lustrates the attention this subject is now receiving. Asymmetry in discrete topology
optimization was also noted by Achtziger and Stolpe [13]. In topology optimization
with continuous design variables Rozvany [14] shows the existence of a symmetric so-
lution, and possible non-uniqueness of the optimal solution, while Kosaka and Swan
[15] attributed asymmetric material layout in continuum problems to numerical round-
off and local asymmetric solutions. Cheng & Lui [16], inspired by the previously
mentioned publications, demonstrated asymmetric solutions in frame topology opti-
mization with frequency objective functions or constraints. However, it is shown that
the validity of symmetry reduction in symmetric optimization problems is primarily
dependent on the nature of the design variables. Starting from these observations the
remainder of the paper is ordered as follows: After an explanation of the scope and
several important definitions (section 2), the relation between the search space and its
symmetric subset is discussed (section 3). Next objective functions and constraints
(section 4) as well as the existence and uniqueness of optimal solutions, with contin-
uous and discrete variables is investigated (section 5). Finally several examples are
presented (section 6).
2 Scope and definitions
The investigation focuses on truss-like structures with either continuous or discrete
variable bar cross section areas. It is conceivable that the principles developed in this
paper apply to topology optimization problems other than the structural kind. Such
problems may include thermal, optical and other optimization problems. Furthermore
the principles may also apply to discrete sizing and shape variables. However, the
authors are primarily interested in structural topology optimization problems. Only
single objective optimization problems are considered.
2.1 General definitions
The structural topology optimization problem consists of: (i) A set of nodes with
fixed spatial coordinates; (ii) a set of boundary conditions corresponding to selected
nodes; (iii) a set of loads applied to selected nodes; and (iv) a set of allowed structural
connectivities between the nodes, called a ground structure. The nodal connectivity
of the ground structure can be represented by an adjacency matrix AGS . The structure
2

10
23 P
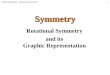
Figure 1: A 6 bar 2D truss design. The dashed line indicates a possible connection
between nodes 1 and 2. This connection forms part of the problem ground structure,
but is absent in this specific design.
in figure 1 has a ground structure with
AGS =
∣
∣
∣
∣
∣
∣
∣
∣
0 1 1 10 1 1
sym.0 1
0
∣
∣
∣
∣
∣
∣
∣
∣
.
A design is a particular structure represented by the problem definition and a specific
set of values for the design variables x. For example, in topology optimization, the
values of x may represent the binary existence or non-existence of elements, and as
such correspond directly to AGS . The particular design in figure 1 is described by
adjacency matrix
A =
∣
∣
∣
∣
∣
∣
∣
∣
0 1 1 10 0 1
sym.0 1
0
∣
∣
∣
∣
∣
∣
∣
∣
and variable vector
x = [1, 1, 1, 0, 1, 1]⊤ .
Each design corresponds to a value of the objective function f(x), used to evaluate the
structural performance. The optimization problem is subject to inequality and equality
constraints, respectively denoted g(x) ≤ 0 and h(x) = 0. Each design is a member of
a set of all possible designs, the problem search space S. The search space is defined
by the bounds of the design variables. The feasible subset Ωf ⊆ S is the set of values
of the variables for which no constraint on the problem is violated, i.e. Ωf is bounded
by the constraints on the problem. The symmetric subset Ωsym ⊆ S is the set of
all possible geometrically and mechanically symmetric structures in S. The feasible
symmetric subset Ωf,sym ⊆ S of the search space is the intersection of the symmetric
3

S
Ω symm
x2
x1
Ω f
Ω opt
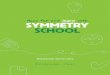
Figure 2: Sets and subsets of the variable space
and feasible subsets Ωf,sym = Ωf ∩ Ωsym. The optimal subset Ωopt ⊆ Ωf ⊆ S is the
set of designs corresponding to the values of x such that the objective function f(x)is minimized (or maximized) in the global sense. A schematic representation of the
various sets is summarized in figure 2.
2.2 Group theory and group representation
Structures are symmetric with respect to an operation if they are left unaltered under
that operation. The geometric symmetry of structures can be studied through algebraic
structures called symmetry groups. Simply stated: a symmetry group G is formed by
the set of possible symmetry operations that do not result in a change in the structure.
The number of symmetry groups is finite [9] and can be reduced depending on the
type of structures under consideration. In this study we consider only finite structures
which are not symmetric under dilatation or translation, the so-called point symmetry
groups. Point groups leave at least one point fixed under all operations in the group
[17]. Thirty two unique point groups exist. In the topology optimization problems
considered here, the symmetry group of the structure is defined by the non-variable
aspects of the problem: the boundary conditions (supports) and non-variable struc-
tural components (such as truss elements, etc.). The loading need not necessarily be
symmetric [18], however for the sake of simplicity symmetric loading is considered
in the examples. Any operation in the point group G, acting on a vector x ∈ Ωsym,
can be represented by the permutation matrix P such that P⊤x = x [19]. We denote
the permutation of x, under symmetry operation ι ∈ G, ι(x) = P⊤ι x. The set of per-
mutation matrices P is a representation of G. The reader is referred to Hamermesh’s
excellent book [20] for an overview of group theoretic concepts.
4

3 Search space and symmetric subset
Using these definitions, Ωsym can be constructed and related to S in a symmetric
topology optimization problem. If the structure represented by a vector x is symmetric
with group G, it can be reduced to a vector x′ such that:
x =⋃
ι∈G
ι(x′).
An equivalent algebraic form can be stated as follows:
x =
m∑
ι=1
m∑
κ=ι
(ι(xικ) + κ(xικ))
2(1)
where xικ is such that:
ι(xικ) = κ(xικ), ι 6= κ
and
ι(xιι)⋂
ι,κ∈G
κ(xκκ) = 0n
where 0n is the null vector of length n. Analogously, the symmetric subset can be
mapped to the search space by means of the reduced topology permutation matrix P′′,
constructed as follows:
P′ =⋃
ι∈G
Pι.
All identical rows of P′ can be collapsed, rendering P′′ with dimension m×n, where
m ≤ n. In this way all symmetric members of S, the m-dimensional x′′ ∈ Ωsym can
be constructed as n-dimensional x ∈ S:
x = P′′⊤x′′ (2)
Noting that both x and x′′ can be represented by binary strings (by concatenating the
entries), both S and Ωsym are countable sets which can be mapped to real positive
integers, a useful way of ordering the sets.
4 Objective functions and constraints
In this paper we consider only mass minimization and compliance minimization. No
explicit constraints (such as maximum stress in elements, buckling of elements, deflec-
tion, . . . ) are considered, with the exception of the kinematic stability of the structures
and a constraint on the volume of the minimum compliance problem.
5

4.1 Mass objective function
In the context of truss structures, the mass objective function is expressed as follows:
fm(x) =ne∑
k=1
mk =ne∑
k=1
ρkAklkxk
where ne is the total number of elements; xk ∈ x; mk, Ak, lk and ρk are respectively
the mass, cross-section area, length and density of element k. The n × n mass matrix
M has entries
mij = ρijAijlijaij, mij ∈ M
and so
fm(x) =1
2
n∑
i=1
n∑
j=1
mij =1
2e⊤Me
where e is a vector containing all ones. The mass matrix is therefore a weighted adja-
cency matrix, with the same structure as the adjacency matrix A. Since the function
fm(x) is linear in x ∈ Rn, it is a convex function, bounded only by the kinematic
stability of the structure.
4.2 Compliance objective function
The compliance energy
fc(x) = f⊤u = f⊤K−1f
is one of the most widely studied objective functions in structural topology optimiza-
tion [21]. Here f is a vector of external loads, u is the vector of nodal displacements
and K is the stiffness matrix of the structure. It has been shown that, if a structural
optimization problem is expressed in terms of variable bar areas, the compliance ob-
jective function is convex [22]. As mentioned an inequality constraint is placed on the
volume of the structure, usually a maximum volume fraction Vf , the quotient of the
volume of the specific design to the volume of the ground structure.
4.3 Constraints
In section 5, the notion of convex combination of the topology of structures is laid out.
The following can be shown, given a symmetric problem: the convex combination of
a kinematically stable topology x with other topologies ι(x), is also kinematically
stable. This is because the problem formulation dictates that x and ι(x) are equivalent
for all ι ∈ G. Therefore the kinematic stability is also equivalent. Convex combination
never leads to a "reduction" in the total topology, therefore the kinematic stability
cannot be violated in the combination of stable structures.
6

5 Convex combination: existence and uniqueness of
solutions
The convex combination of designs i represented by variable vectors xi ∈ Ω is a
design x, such that:
x =∑
i
λixi. (3)
where x ≡ A ∈ Ω, λi ∈ [0, 1],∑
i
λi = 1 , Ω is some set of designs and
xi = [xi,1, xi,2, . . . , xi,n]⊤
In what follows we investigate the case where the design variable vectors have either
continuous (xi,j ∈ [0, 1]) or binary discrete (xi,j ∈ 0, 1) entries.
5.1 Convex combination and variable mapping
Given a function f : S → R, any convex combination of the variables will have a
corresponding value to which the function f can map it. If, in addition, the function
is an affine mapping, the map of the convex combination of the variables will be the
convex combinations of the mappings
f
(
m∑
i=1
λixi
)
=m∑
i=1
λif(xi) (4)
wherem∑
i=1
λi = 1. Therefore any convex combination of variables will also be a convex
combination in the function space. The following important result follows: if both x
and f(x) are convex, any convex combination of optimal solutions is also optimal, and
the convex combination of the variables maps to this optimal function value. Jensen’s
inequality states that, for a convex function
f
(
n∑
i=1
λixi
)
≤
n∑
i=1
λif (xi) . (5)
In one variable this can be interpreted as saying that the secant line of a convex func-
tion lies "above" the graph wherem∑
i=1
λi = 1. However, since f(xi) = f(xj) for all
xi,xj ∈ Ωopt, on the optimal set, equation (5) becomes equation (4). If an asymmetric
optimal solution can be found, the symmetry group permutations of this design are
also optimal, since the structures are equivalent according to the problem statement.
The complex combination of the variables can be mapped to the complex combina-
tion of the objective functions via an affine mapping. The complex combination is
therefore also optimal. An intuitive interpretation of this, on a non-convex function, is
shown in figure 3.
7

f(x)
x
A B
Figure 3: The convex combination of two optima for a non-convex function
5.2 Convex combination with continuous variables
In this section we consider symmetric problems with continuous design variables.
These problems are similar to those discussed in classical topology optimization,
where the bar cross section areas represented by continuous variables [23, 21]. Here
the structure is represented by a weighted adjacency matrix corresponding to a con-
tinuous design variable vector
x = [x1, x2, . . . , xm]⊤ .
Consider the convex combination of designs
xi = [xi,1, xi,2, . . . , xi,m]⊤.
It follows directly from equation (3) that in the maximum case, where xi,j = 1 for all
i and jm∑
i=1
λixi,j =m∑
i=1
λi = 1
All intermediate values are permitted since all are in R. Since all entries of a weighted
adjacency matrix Bi are either 0 or xi,j , all bi,jk ∈ R. The following theorem is a
generalization of the principles stated by Rozvany [14].
Theorem 5.1. For any convex, symmetric topology optimization problem using con-
tinuous variables, if a solution exists a symmetric solution exists.
Proof. Suppose an optimal solution f(y) exists. If the problem is symmetric with
respect to operations ι ∈ G, ι(y) also exists and is optimal. A convex combination of
vectors ι(y) such that:
x =m∑
ι=1
λιι(y).
8

Due to the distributivity of ι, a decomposition of y, as described in section 3 can be
made
x =m∑
ι=1
λι
m∑
κ=1
ι(yικ)
=
m∑
ι=1
λι
m∑
κ=1
ι(yικ) +m∑
κ=1
λκ
m∑
ι=1
κ(yκι)
2
=
m∑
ι=1
m∑
κ=1
(λιι(yικ) + λκκ(yκι))
2.
Since yικ = yκι, terms can be eliminated, and taken up in the expression of λι. Fur-
thermore if we choose all λι equal
x = λι
m∑
ι=1
m∑
κ=ι
(ι(yικ) + κ(yκι))
2
Equation (1) is satisfied and x ∈ Ωf,sym ∩ Ωopt.
5.3 Convex combination with discrete variables
In this section, the bar sizing variables are considered to be discrete, binary variables
xj ∈ 0, 1. The linear combinations of n vectors lead to a system of m equations,
where the following holds:
(xj ∈ 0, 1) ⇐⇒
((
n∑
i=1
λixi,j
)
∈ 0, 1
)
Two scenarios are possible for any xj:
1. xi,j = xl,j, ∀i, l
2. ∃i, l : xi,j 6= xl,j
In the former case the convex combination can be constructed, but this is a trivial case
where the vectors are identical. In the latter the linear combination of the vectors,
having elements in 0, 1, can only be constructed if
n∑
i=1
xi,j =
n∑
l=1
xl,j
0∀j
However this construction would violate the condition thatn∑
i=1
λi = 1.
9

Theorem 5.2. For any set of (non-trivial) binary adjacency matrices, no convex com-
bination of these matrices is possible.
Proof. Assumingm∑
i=1
xi,j = r where r ∈ 1 . . . (m − 1). If at least n entries in
x are non-zero, a system of n equationsm∑
i=1
λixi,j = 1 can be set up. Furthermore,
we assume that none of the vectors xi is the trivial null vector, so that 0 < λi ≤ 1.
Assume now that there are some i in a set A of size m − r for which xi,j = 0. Thenm∑
i=1
λixi,j =∑
i/∈A
λi = 1. Therefore:∑
i/∈A
λi +∑
j∈A
λj > 1 and the linear combination is
not convex.
This automatically leads to the following result:
Corollary 5.3. In symmetric binary topology optimization problems, if an asymmet-
ric optimal solution exists, no corresponding symmetric solution can necessarily be
constructed.
Proof. As in section 5.2 the symmetric solution can be expressed as the convex combi-
nation the permuted asymmetric solution. However it has been shown that the convex
combination of any binary adjacency matrices cannot be constructed. Therefore, no
corresponding symmetric solution necessarily exists, and if a symmetric solution does
exist it is unique.
Since no convex mapping is possible between symmetric and asymmetric solutions,
and at most one optimal symmetric solution exists, the relative sizes of the symmetric
and asymmetric feasible solution sets plays a role in the probability of the existence
of a symmetric solution. This is now demonstrated by means of several examples.
6 Examples
The first is a 2D truss, with point group S2, consisting only of the identity operation
and a line of ’mirror symmetry’ through the middle of the structure. The second is a
3D pylon structure, with three-fold rotational symmetry about a central, vertical axis,
and three planes of ’mirror symmetry’, as well as the trivial identity operation. This
structure therefore has dihedral symmetry group D3. Both structures are investigated
considering two possible objective functions, namely the mass of the structure and the
compliance energy under a given loading. All possible topologies (the entire search
space) are evaluated and the symmetric subset of the search space constructed as de-
scribed above. The optimal solutions for the objective functions can then be compared
with the best performing symmetric solutions.
10

1 3
2
4 6
5
7 9
8
Figure 4: 20 bar 2D problem ground structure
6.1 20-bar 2D truss
6.1.1 Problem
The ground structure of the 20 bar topology optimization problem is shown in fig-
ure 4. For this problem the nodes are distributed regularly at the vertices of a grid
with spacing one unit in the two (Euclidean) dimensions of the problem. The nodal
coordinates, supports and loading are as follows:
c =
0, 01, 02, 00, 11, 12, 10, 21, 22, 2
bc =
1, 10, 00, 01, 10, 00, 00, 00, 00, 0
p =
0, 00, 00, 00, 00, 00, 00, 00, 10, 0
.
The symmetry of the structure is expressed by the amorphism group G of the graph
with adjacency matrix A, representing the topology of the structure. The structural
conditions have symmetry point group S2 = E, σ, where E is the identity oper-
ation and σ a reflection about a line. The symmetry operation σ corresponds to the
11

permutation matrix Pσ and adjacency matrix for the ground structure are as follows:
AGS =
0 1 0 1 1 0 0 0 00 1 1 1 1 0 0 0
0 0 1 1 0 0 00 1 0 1 1 0
0 1 1 1 1
sym.0 0 1 1
0 1 00 1
0
≡ xGS = e20 (6)
where e20 is a 20 dimensional vector of ones. Keeping the nodal connectivity in mind,
it is relatively simple to construct the topological permutation matrix
Pσ =
0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 01 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
.
Furthermore, a decomposition of the vector xGS can be made
xσσ = xEE = [1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1, 0]⊤
and
xEσ = xσE = [0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0]⊤.
It can be easily confirmed that, as in equation (1)
2E(xEE) + E(xEσ) + σ(xEσ) + 2σ(xσσ)
2= x.
Ωsym has 211 = 2048 members, while the topological search space S has 220 members.
12

400
600
800
1000
1200
1400
0 200000 400000 600000 800000 1e+06
Ma
ss
Solution number
asymmetricsymmetric
Figure 5: Symmetric and asymmetric structure mass objective functions
6.1.2 Results
For simplicity sake the variables of each design have been mapped to natural numbers
x → N, since a one-to-one mapping exists and this allows for a meaningful plotting
of results. To do this the topology variables are taken to be the digits of a binary
number. All feasible masses of the structures in S and in Ωsym are shown in figure 5.
Note that the minimum feasible mass is not symmetric. The two (feasible) minimum
mass structure is shown in figure 7. As expected the two solutions are asymmetric,
mirror images of one another about a vertical line. For the compliance objective func-
tion, taking the volume fraction V ≤ 0.4, the same topology is found as in figure
7. The minimum symmetric mass solution is 1.55 times greater than the asymmetric
minimum mass solution.
6.2 24 bar 3D truss
6.2.1 Problem
In this example a 24 bar 3D truss is investigated. The structure has dihedral symmetry
group
G = D3 =
E,C3, C2
3, Ca
2, Cb
2, Cc
2
13

8
10
12
14
16
18
400 600 800 1000 1200
Co
mp
lian
ce
en
erg
y
Volume
asymmetricsymmetric
Figure 6: Symmetric and asymmetric structure for variable volume constraint
Figure 7: Minimum objective function values: both mass and compliance (V ≤ 0.4)
14

Figure 8: 24 bar 3D structure ground structure
The ground structure can be seen in figure 8, with a plan view (with the three re-
flection axes) shown in figure 9. Three vertical, unitary point forces act on the three
highest nodes on the structure. Only binary topology variables are used and the a unit
bar section area taken for simplicity sake. All three supports are pinned, restraining
displacements translationally in all three dimensions.
6.2.2 Results
All 224 designs in the search space were calculated. Only 64 structures in the search
space are D3 group symmetric. The 8 least mass solutions are shown in figure 10.
Two distinct solutions can be seen. Taking structure 1 as one of these, the following
mappings are present:
x2 = σa(x1)
x4 = C2
3(x1)
x5 = Cb2(x1)
x7 = C3(x1)
x8 = Cb2(x1).
The second type is structures number 3 and 6. For this structure the following holds:
x7 = Ca2(x3) = Cb
2(x3) = Cb
2(x3)
x3 = C3(x3) = C2
3(x3)
x7 = C3(x7) = C2
3(x7).
15

5
3
0 1 2
6
7
8
4
a
c
b
Figure 9: 24 bar 3D structure ground structure plan view
1 2 3 4
5 6 7 8
Figure 10: 24 bar 3D structure: least mass solutions
16

1 2 3
4 5 6
Figure 11: 24 bar 3D structure: lowest compliance energy solutions
In figure 11 the minimum compliance results are shown, with volume fraction con-
straint V ≤ 0.7. These results demonstrate one single, asymmetric solution, and the
5 other permutations corresponding to the D3 group. None of the optimal structures
are symmetric with respect to the symmetry group D3 In the case of the compliance
minimization problem, the structures do posses any of the non-trivial symmetries in
this group. The symmetric minimum mass solution was approximately 1.2 times the
mass of the asymmetric solution, while for the compliance solutions, this ratio was
approximately 1:1.14.
7 Conclusions and discussion
In this paper we have shown that for point symmetric topology optimization prob-
lems of the type discussed above, if a solution exists, at least one symmetric solution
exists. Furthermore, we have proven and demonstrated in the examples, that, given
a binary topology problem of the type discussed above, no symmetric solution nec-
essarily exists. One interesting future prospect could be the investigation of design
variables with discrete domains of a greater size (i.e. variables able to take on more
than two discrete values). It is reasonable to predict an increase in the probability of
symmetric solutions in these cases, tending towards the 100% probability shown in
the continuous case, as the size of the discrete set increases. We have, in research into
multiobjective discrete topology optimization, also noted the asymmetric phenomena
in results. Extension to the multiobjective case could also be an interesting future
prospect for this research. While it is strongly embedded in the engineering tradition
to enforce symmetry in symmetric problems, it has been shown that the discrete na-
ture of the optimization variables calls this practice into question. In the examples, the
asymmetric solutions performed significantly better compared to the best symmetric
17

solutions. The authors believe that the evidence suggests that there is some room for
discussion on this front. It is the hope that a relaxing of this assumption may lead to
more efficient and elegant designs in practice.
Acknowledgements
The first author would like to thank the Fonds de la Recherche Scientifique (FNRS)
for financial support of this research.
References
[1] A. Zingoni, “Group-theoretic exploitations of symmetry in computational solid
and structural mechanics”, International Journal for Numerical Methods in En-
gineering, 79(February): 253–289, 2009.
[2] “On the stability analysis of symmetrical frameworks”, Quarterly Journal of
Mechanics and Applied Mathematics, 17: 175–197, 1964.
[3] T. J., Healey, “A group-theoretic approach to computational bifurcation prob-
lems with symmetry”, Computer Methods in Applied Mechanics and Engineer-
ing, 67(3): 257 – 295, 1988.
[4] K. Ikeda, K. Murota, “Bifurcation analysis of symmetric structures using block-
diagonalization”, Comput. Methods Appl. Mech. Eng., 86: 215–243, March
1991.
[5] Ð. Zlokovic, Group theory and G-vector spaces in structures: vibrations, sta-
bility, and status, Ellis Horwood series in civil engineering. E. Horwood, 1989.
[6] A. Zingoni, M. Pavlovic, G. Zlokovic, “Application of group theory to the anal-
ysis of space frames”, in G. Parke, C. Howard (Editors), Space Structures, pages
1334–1347. Thomas Telford: London, 1993.
[7] A. Kaveh, M. Nikbakht, H. Rahami, “Improved group theoretic method using
graph products for the analysis of symmetric-regular structures”, Acta Mechan-
ica, 210: 265–289, 2010, ISSN 0001-5970.
[8] A. Kaveh, M. Nikbakht, “Analysis of space truss towers using combined sym-
metry groups and product graphs”, Acta Mechanica, 218: 133–160, 2011.
[9] R. Kangwai, S. Guest, S. Pellegrino, “An introduction to the analysis of sym-
metric structures”, Computers & Structures, 71(6): 671–688, 1999.
[10] K. Deb, S. Gulati, “Design of truss-structures for minimum weight using genetic
algorithms”, Finite Elements in Analysis and Design, 37(5): 447–465, 2001.
[11] Y. Bai, E. Klerk, D. Pasechnik, R. Sotirov, “Exploiting group symmetry in truss
topology optimization”, Optimization and Engineering, 10(3): 331–349, 2008.
[12] M. Stolpe, “On some fundamental properties of structural topology optimiza-
tion problems”, Structural and Multidisciplinary Optimization, 41(5): 661–670,
2010.
18

[13] W. Achtziger, M. Stolpe, “Truss topology optimization with discrete design
variables–guaranteed global optimality and benchmark examples”, Structural
and Multidisciplinary Optimization, 34(1): 1–20, 2007.
[14] G. Rozvany, “On symmetry and non-uniqueness in exact topology optimiza-
tion”, Structural and Multidisciplinary Optimization, pages 1–21, 2010.
[15] I. Kosaka, C.C. Swan, “A symmetry reduction method for continuum structural
topology optimization”, Computers & Structures, 70(1): 47 – 61, 1999.
[16] G. Cheng, X. Liu, “Discussion on symmetry of optimum topology design”,
Structural and Multidisciplinary Optimization, pages 1–5, 2011.
[17] J. Leech, “How to use Groups”, American Journal of Physics, 38: 273, 1970.
[18] A. Zingoni, M.N. Pavlovic, G.M. Zlokovic, “A symmetry-adapted flexibility
approach for multi-storey space frames: eneral outline and symmetry-adapted
redundants”, Structural Engineering Review, 7(2): 107–119, 1995.
[19] K. Balasubramanian, “Graph theoretical perception of molecular symmetry”,
Chemical Physics Letters, 232(5âAS6): 415 – 423, 1995.
[20] M. Hamermesh, Group theory and its application to physical problems, Dover
books on physics and chemistry. Dover Publications, 1989.
[21] M. Bendsøe, O. Sigmund, Topology optimization: theory, methods, and appli-
cations, Springer, 2003.
[22] K. Svanberg, “On local and global minima in structural optimization”, in
E. Atrek, R.H. Gallagher, K.M. Ragsdell, O.C. Zienkiewicz (Editors), New di-
rections in optimal structural design. John Wiley and Sons, 1984.
[23] M.P. Bendsøe, A. Ben-Tal, J. Zowe, “Optimization methods for truss geometry
and topology design”, Structural and Multidisciplinary Optimization, 7: 141–
159, 1994.
19


























![[Pesadilla a 6000 metros] Matheson, Richard.pdf](https://img.dokumen.tips/doc/110x75/55cf96c0550346d0338d869f/pesadilla-a-6000-metros-matheson-richardpdf.jpg)