Embed Size (px)
Citation preview
Sveučilište u Splitu
Fakultet Elektrotehnike,
Strojarstva i Brodogradnje
DIGITALNE TELEKOMUNIKACIJE
Skripta predavanja
Ak. godina: 2015./16.

Sadržaj
Popis slika iii
Popis tablica v
1 Prijenos signala realnim kanalima 11.1 Utjecaj komunikacijskog kanala na prijenos signala . . . . . . . . 11.2 Prijenos signala bez interferencije . . . . . . . . . . . . . . . . . . 5
1.2.1 Nyquistov kriterij za prijenos signala . . . . . . . . . . . . 61.3 Prijenos signala s kontroliranom interferencijom . . . . . . . . . . 91.4 Projenos signala komunikacijskim kanalom s izobličenjem . . . . 121.5 Ekvalizacija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.1 Ekvalizator minimalne srednje kvadratne pogreške . . . . 151.5.2 LS ekvalizator . . . . . . . . . . . . . . . . . . . . . . . . 171.5.3 Algoritam s odlučivanjem u povratnoj vezi . . . . . . . . 181.5.4 Zero forcing ekvalizator . . . . . . . . . . . . . . . . . . . 20
1.6 Zadaci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Sinkronizacija 272.1 Procjena parametara signala . . . . . . . . . . . . . . . . . . . . . 27
2.1.1 Funkcija podudarnosti . . . . . . . . . . . . . . . . . . . . 282.1.2 Rekonstrukcija nosioca i sinkronizacija simbola . . . . . . 29
2.2 Procjena faze nosioca . . . . . . . . . . . . . . . . . . . . . . . . . 292.2.1 Procjena faze nosioca metodom maksimalne podudarnosti 312.2.2 Petlja zaključana fazom . . . . . . . . . . . . . . . . . . . 332.2.3 Utjecaj aditivnog šuma na procjenu faze . . . . . . . . . . 342.2.4 Decision – Directed Loops . . . . . . . . . . . . . . . . . . 35
3 Kodiranje 363.1 Linearni blok kodovi . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.1.1 Generator matrica i matrica pariteta . . . . . . . . . . . . 383.1.2 Ciklički kôdovi . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2 Konvolucijski kodovi . . . . . . . . . . . . . . . . . . . . . . . . . 48
i
SADRŽAJ ii
4 Komunikacijske mreže 604.1 Uvod i osnovni pojmovi . . . . . . . . . . . . . . . . . . . . . . . 604.2 Fizički sloj . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.3 Podatkovni sloj . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.4 Mrežni sloj . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.4.1 Metode prospajanja . . . . . . . . . . . . . . . . . . . . . 644.4.2 Usmjeravanje paketa . . . . . . . . . . . . . . . . . . . . . 69
4.5 Zadaci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Popis slika
1.1 QPSK konstelacija u neidealnom kanalu . . . . . . . . . . . . . . 21.2 Primjer amplitudno-faznog izobličenja telefonskog kanala . . . . 31.3 Interferencija među simbolima kod QPSK: vektorski prikaz (li-
jevo) i efekt na konstelacijskom dijagramu (desno) . . . . . . . . 31.4 Jednostavni model za analizu utjecaja komunikacijskog kanala. . 31.5 Prijenosni kanal sa intersimbolnom interferencijom i signali . . . 41.6 Dijagram oka: pojasno ograničeni kanal . . . . . . . . . . . . . . 41.7 Dijagram oka: idealni kanal . . . . . . . . . . . . . . . . . . . . . 51.8 Model komunikacijskog sustava u osnovnom pojasu . . . . . . . . 61.9 Odziv u vremenskom području pravokutnog filtra. . . . . . . . . 71.10 Prijenosna funkcija pravokutnog filtra. . . . . . . . . . . . . . . . 71.11 Frekvencijska karakteristika filtra tipa podignuti kosinus . . . . . 81.12 Odziv u vremenskom području filtra tipa podignuti kosinus . . . 91.13 Primjer signala s kontroliranom interferencijom . . . . . . . . . . 91.14 Duobinarni impuls . . . . . . . . . . . . . . . . . . . . . . . . . . 101.15 Modificirani duobinarni impuls . . . . . . . . . . . . . . . . . . . 111.16 Modificirani duobinarni impuls . . . . . . . . . . . . . . . . . . . 111.17 Duobinarni sustav . . . . . . . . . . . . . . . . . . . . . . . . . . 121.18 Duobinarni filtar . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.19 Primjer duobinarnog sustava . . . . . . . . . . . . . . . . . . . . 131.20 Modificirani duobinarni sustav . . . . . . . . . . . . . . . . . . . 131.21 Komunikacijski sustav s ekvalizatorom . . . . . . . . . . . . . . . 141.22 Komunikacijski sustav s ekvalizatorom i obojanim šumom . . . . 141.23 Komunikacijski sustav s filtrom za izbjeljivanje i ekvalizatorom . 151.24 Model transverzalnog filtra . . . . . . . . . . . . . . . . . . . . . 151.25 Ekvivalentni komunikacijski sustav s ekvalizatorom . . . . . . . . 161.26 Linearni ekvalizator . . . . . . . . . . . . . . . . . . . . . . . . . 161.27 Višerazinski sustav s prekodiranjem . . . . . . . . . . . . . . . . 221.28 Višerazinski sustav s prekodiranjem . . . . . . . . . . . . . . . . 23
2.1 Blok dijagram binarnog PSK prijamnika. . . . . . . . . . . . . . 29
iii

POPIS SLIKA iv
2.2 Blok dijagram QAM prijamnika. . . . . . . . . . . . . . . . . . . 302.3 PLL sklop za postizanje ML procjene faze nemoduliranog nosioca. 322.4 ML procjena faze nemoduliranog nosioca. . . . . . . . . . . . . . 332.5 Ekvivalentna shema PLL sklopa. . . . . . . . . . . . . . . . . . . 34
3.1 Koder sistematskog (7, 4) koda. . . . . . . . . . . . . . . . . . . . 403.2 Posmični registar za dijeljenje polinoma A(p) s g(p). . . . . . . . 483.3 Model (n, k) konvolucijskog kodera . . . . . . . . . . . . . . . . . 483.4 Konvolucijski koder (3, 2, 3) . . . . . . . . . . . . . . . . . . . . . 493.5 Konvolucijski koder (3, 1, 3) . . . . . . . . . . . . . . . . . . . . . 513.6 Konvolucijski koder (3, 2, 2) . . . . . . . . . . . . . . . . . . . . . 513.7 Konvolucijski koder (2, 1, 4) . . . . . . . . . . . . . . . . . . . . . 533.8 Konvolucijski koder (2, 1, 3) . . . . . . . . . . . . . . . . . . . . . 533.9 Dijagram stanja konvolucijskog kodera (2, 1, 2) . . . . . . . . . . 543.10 Kodna rešetka konvolucijskog kodera (2, 1, 2) . . . . . . . . . . . 553.11 Kodna rešetka za izračun udaljnosti . . . . . . . . . . . . . . . . 563.12 Dijagram stanja konvolucijskog koda (2, 1, 4) . . . . . . . . . . . 563.13 Dekodiranje konvolucijskog koda (2, 1, 3) pomoću kodne rešetke . 59
4.1 Primjer komunikacijske mreže . . . . . . . . . . . . . . . . . . . . 614.2 Mrežni uređaji . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.3 Kvadratna spojna mreža . . . . . . . . . . . . . . . . . . . . . . . 654.4 Pravokutna spojna mreža . . . . . . . . . . . . . . . . . . . . . . 654.5 Trokutasta spojna mreža . . . . . . . . . . . . . . . . . . . . . . . 654.6 Prospojnik s tri stupnja . . . . . . . . . . . . . . . . . . . . . . . 664.7 Vremensko prospajanje . . . . . . . . . . . . . . . . . . . . . . . . 674.8 Vremensko - prostorno - vremensko prospajanje . . . . . . . . . . 674.9 Usmjeravanje paketa metodom virtualnih kanala . . . . . . . . . 694.10 Usmjeravanje paketa metodom virtualnih kanala . . . . . . . . . 704.11 Primjer mreže s pridruženim težinama po granama . . . . . . . . 71
Popis tablica
3.1 Zbrajanje i množenje u polju GF(2) . . . . . . . . . . . . . . . . 373.2 Zbrajanje i množenje u polju GF(5) . . . . . . . . . . . . . . . . 383.3 Kodne riječi (7, 4) koda dobivenog generator polinomom p3+p2+1 443.4 Kodne riječi (7, 3) koda dobivenog generator polinomom p4 +
p3 + p2 + 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.5 Tablica stanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.6 Tablica istine cikličkog koda (2, 1, 4) . . . . . . . . . . . . . . . . 543.7 Funkcija udaljenosti . . . . . . . . . . . . . . . . . . . . . . . . . 563.8 Tablica istine cikličkog koda (2, 1, 4) . . . . . . . . . . . . . . . . 573.9 Funkcija udaljenosti cikličkog koda (2, 1, 4) . . . . . . . . . . . . 573.10 Vrijednost generator sekvenci za (2, 1, N) konvolucijski kod . . . 583.11 Vrijednost generator sekvenci za (3, 1, N) konvolucijski kod . . . 583.12 Vrijednost generator sekvenci za (3, 2, N) konvolucijski kod . . . 58
4.1 Primjer tablice kod statičkog usmjeravanja . . . . . . . . . . . . . 714.2 Primjer tablice kod dinamičkog usmjeravanja . . . . . . . . . . . 72
v
Poglavlje 1
Prijenos signala realnimkanalima
1.1 Utjecaj komunikacijskog kanala na prijenossignala
Kod jednostavnih analiza digitalnih komunikacijskih sustava, uobičajeno je pret-postaviti da je neograničena pojasna širina B, odnosno frekvencijski opseg naraspolaganju za prijenos signala. U realnim sustavima u pravilu je pojasnaširina ograničena i manja od gornje granične frekvencije signala fc. Da bi seograničila pojasna širina signala, te na taj način prilagodila komunikaicjskomkanalu potrebno je u predajniku primjeniti filtar. Posljedica primjene filtra upredajniku dovodi to amplitudnih i faznih izobličenja, a posljedično i do utje-caja valnog oblika koji predstavalja određeni simbol na susjedne simbole što sezove interferencija među simbolima (intersymbol interference - ISI).
Dakle, želja je da se pojasna širina kanala drži što manjom u svrhu štoekonomičnijeg iskorištenja raspoloživog kanala, odnosno da se uz raspoloživikanal ostvari maksimalno moguća brzina prijenosa. Npr. po telefonskoj paricidanašnji sustavi putem asimetrične digitalne pretplatničke linije (ADSL) postižubrzine od nekoliko megabita po sekundi u prijenosu podataka prema korisniku,odnosno nekoliko stotina megabita po sekundi u prijenosu podataka od korisnikaprema mreži.
Da bi se postigle tražene brzine, potrebne su napredne tehnike modulacije,kodiranja kanala i konstrukcije analognog signala pomoću sustava za obradudigitalnog signala i pretvorbu u analogni, vodeći računa o svojstvima komu-nikacijskog kanala koji je na raspolaganju. Kod prijenosa digitalnih signalarealnim komunikacijski kanalima javljaju se sljedeće neželjene pojave:
• bijele, nebijele, impulsne i praskave smetnje i feding
1

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 2
• amplitudna i fazna izobličenja
• harmonička distorzija (nelinearna distorzija)
• fluktuacija takta i translacija frekvencije
• efekt odjeka (eng. echo – jeka)
• preslušavanje
Slika 1.1: QPSK konstelacija u neidealnom kanalu
Slika 1.1 ilustrira u konstelacijskom dijagramu kako se pojedine spomenuteneidealnosti manifestiraju na primjeru QPSK modulacije. Zbog slučajnosti sa-mog signala koji se prenosi, kao i zbog slučajnosti izobličenja, ukupan efekt svihneidealnosti se manifestira smanjenjem sigurnosti odlučivanja, odnosno poveće-njam greški u prijenosu.
Središnji problem kojeg treba prvo analizirati je izobličenje nastalo usljed po-jasne ograničenosti kanala odnosno rezultirajuće amplitudno i fazno izobličenje.Svi komunikacijski sustavi imaju konačnu pojasnu širinu. Ovo je ili posljedicaograničene širine kanala ili ograničenja u području propuštanja filtara u oredaj-niku i prijamniku koji definiraju raspoloživo frekvencijsko područje, ili što jenajčešće, i jednog i drugog. Analiza utjecaja ograničene pojasne širine kanalana valni oblik signala prikladno je, bez gubitka općenitosti, promatrati za slu-čaj prijenosa signala u osnovnom pojasu. Na slici 1.2 prikazan je izlazni signaliz komunikacijskog kanala ograničene pojasne širine, kad je na ulazu prisutanidealan pravokutan impuls.
Kao što se vidi, izlazni signal je jako izobličen. Kod prijenosa digitalnihsignala, impulsi na ulazu u kanal nailaze slučajno uz određeni interval javljanjaTs, odnosno brzinu prijenosa r = 1/Ts. Ako brzina prijenosa nije mnogo ma-nja od širine kanala, izlazni impulsi će se međusobno preklapati, odnosno doći
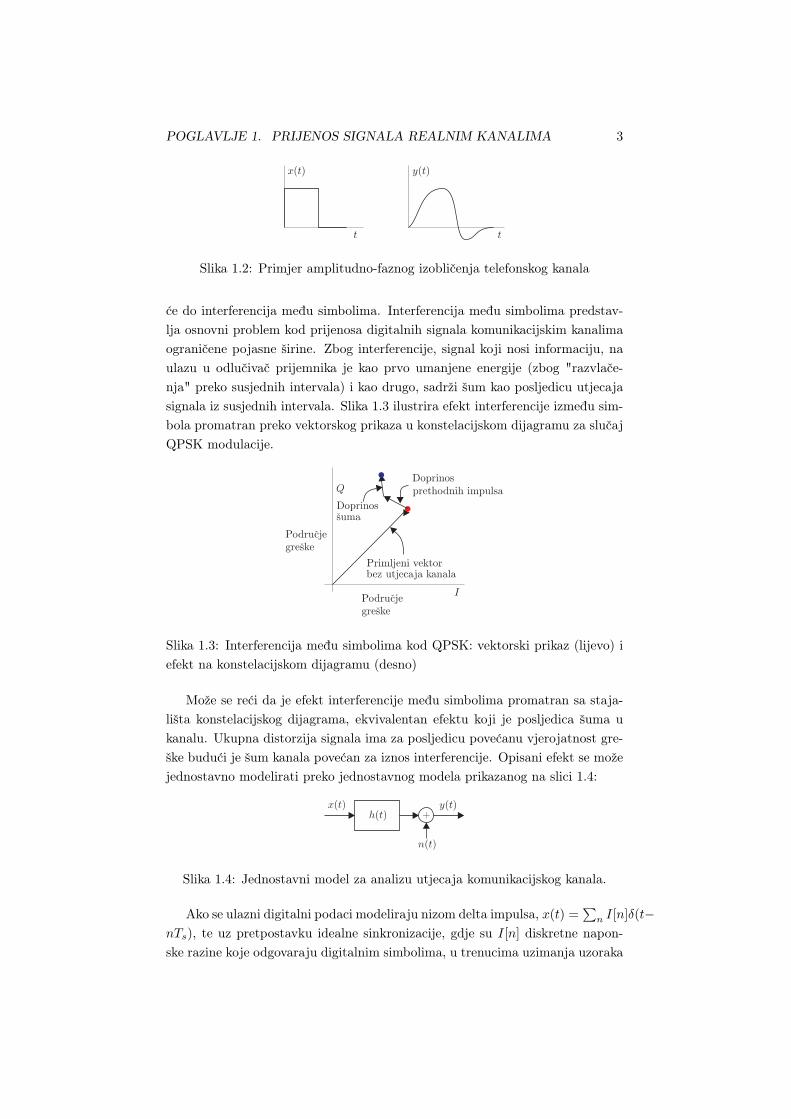
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 3
Slika 1.2: Primjer amplitudno-faznog izobličenja telefonskog kanala
će do interferencija među simbolima. Interferencija među simbolima predstav-lja osnovni problem kod prijenosa digitalnih signala komunikacijskim kanalimaograničene pojasne širine. Zbog interferencije, signal koji nosi informaciju, naulazu u odlučivač prijemnika je kao prvo umanjene energije (zbog "razvlače-nja" preko susjednih intervala) i kao drugo, sadrži šum kao posljedicu utjecajasignala iz susjednih intervala. Slika 1.3 ilustrira efekt interferencije između sim-bola promatran preko vektorskog prikaza u konstelacijskom dijagramu za slučajQPSK modulacije.
Slika 1.3: Interferencija među simbolima kod QPSK: vektorski prikaz (lijevo) iefekt na konstelacijskom dijagramu (desno)
Može se reći da je efekt interferencije među simbolima promatran sa staja-lišta konstelacijskog dijagrama, ekvivalentan efektu koji je posljedica šuma ukanalu. Ukupna distorzija signala ima za posljedicu povećanu vjerojatnost gre-ške budući je šum kanala povećan za iznos interferencije. Opisani efekt se možejednostavno modelirati preko jednostavnog modela prikazanog na slici 1.4:
Slika 1.4: Jednostavni model za analizu utjecaja komunikacijskog kanala.
Ako se ulazni digitalni podaci modeliraju nizom delta impulsa, x(t) =∑
n I[n]δ(t−nTs), te uz pretpostavku idealne sinkronizacije, gdje su I[n] diskretne napon-ske razine koje odgovaraju digitalnim simbolima, u trenucima uzimanja uzoraka
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 4
t = nTs vrijedi:
y(nTs) =∑k
I[n]h(nTs − kTs) + n(nTs)
= I[n]h(0) +∑k =n
I[n]h(nTs − kTs) + n(nTs)(1.1)
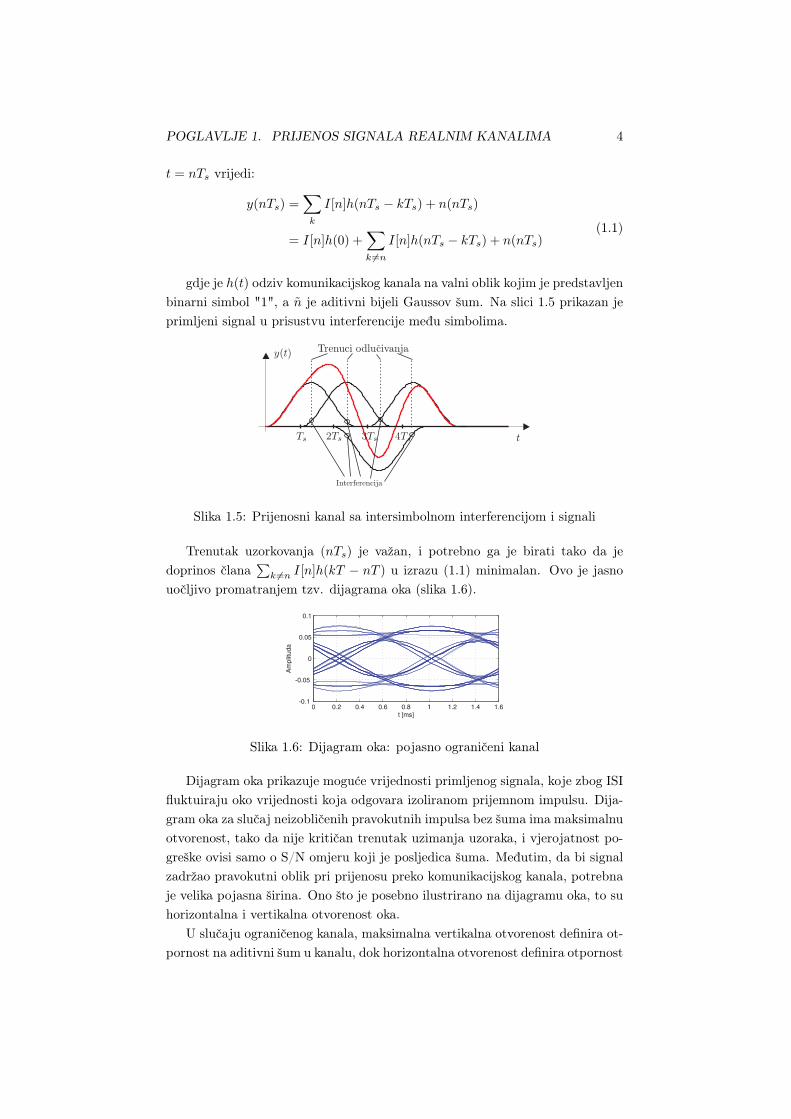
gdje je h(t) odziv komunikacijskog kanala na valni oblik kojim je predstavljenbinarni simbol "1", a n je aditivni bijeli Gaussov šum. Na slici 1.5 prikazan jeprimljeni signal u prisustvu interferencije među simbolima.
Slika 1.5: Prijenosni kanal sa intersimbolnom interferencijom i signali
Trenutak uzorkovanja (nTs) je važan, i potrebno ga je birati tako da jedoprinos člana
∑k =n I[n]h(kT − nT ) u izrazu (1.1) minimalan. Ovo je jasno
uočljivo promatranjem tzv. dijagrama oka (slika 1.6).
Slika 1.6: Dijagram oka: pojasno ograničeni kanal
Dijagram oka prikazuje moguće vrijednosti primljenog signala, koje zbog ISIfluktuiraju oko vrijednosti koja odgovara izoliranom prijemnom impulsu. Dija-gram oka za slučaj neizobličenih pravokutnih impulsa bez šuma ima maksimalnuotvorenost, tako da nije kritičan trenutak uzimanja uzoraka, i vjerojatnost po-greške ovisi samo o S/N omjeru koji je posljedica šuma. Međutim, da bi signalzadržao pravokutni oblik pri prijenosu preko komunikacijskog kanala, potrebnaje velika pojasna širina. Ono što je posebno ilustrirano na dijagramu oka, to suhorizontalna i vertikalna otvorenost oka.
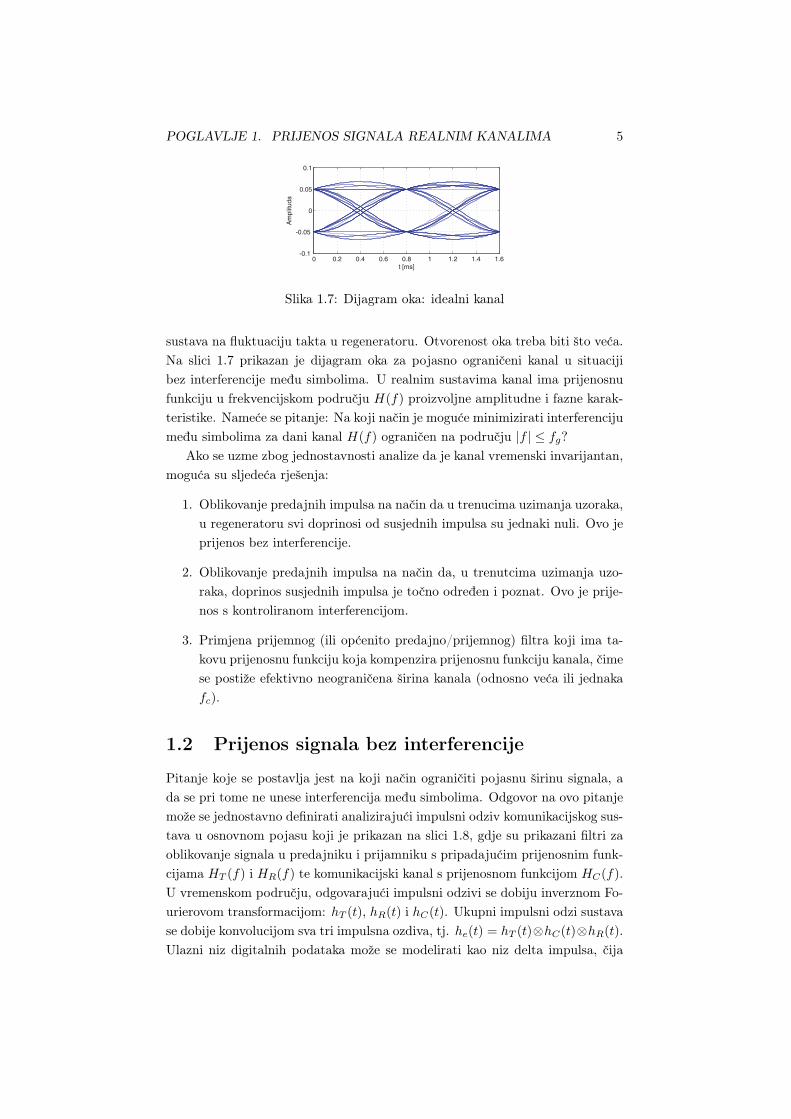
U slučaju ograničenog kanala, maksimalna vertikalna otvorenost definira ot-pornost na aditivni šum u kanalu, dok horizontalna otvorenost definira otpornost
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 5
Slika 1.7: Dijagram oka: idealni kanal
sustava na fluktuaciju takta u regeneratoru. Otvorenost oka treba biti što veća.Na slici 1.7 prikazan je dijagram oka za pojasno ograničeni kanal u situacijibez interferencije među simbolima. U realnim sustavima kanal ima prijenosnufunkciju u frekvencijskom području H(f) proizvoljne amplitudne i fazne karak-teristike. Nameće se pitanje: Na koji način je moguće minimizirati interferencijumeđu simbolima za dani kanal H(f) ograničen na području |f | ≤ fg?
Ako se uzme zbog jednostavnosti analize da je kanal vremenski invarijantan,moguća su sljedeća rješenja:
1. Oblikovanje predajnih impulsa na način da u trenucima uzimanja uzoraka,u regeneratoru svi doprinosi od susjednih impulsa su jednaki nuli. Ovo jeprijenos bez interferencije.
2. Oblikovanje predajnih impulsa na način da, u trenutcima uzimanja uzo-raka, doprinos susjednih impulsa je točno određen i poznat. Ovo je prije-nos s kontroliranom interferencijom.
3. Primjena prijemnog (ili općenito predajno/prijemnog) filtra koji ima ta-kovu prijenosnu funkciju koja kompenzira prijenosnu funkciju kanala, čimese postiže efektivno neograničena širina kanala (odnosno veća ili jednakafc).
1.2 Prijenos signala bez interferencije
Pitanje koje se postavlja jest na koji način ograničiti pojasnu širinu signala, ada se pri tome ne unese interferencija među simbolima. Odgovor na ovo pitanjemože se jednostavno definirati analizirajući impulsni odziv komunikacijskog sus-tava u osnovnom pojasu koji je prikazan na slici 1.8, gdje su prikazani filtri zaoblikovanje signala u predajniku i prijamniku s pripadajućim prijenosnim funk-cijama HT (f) i HR(f) te komunikacijski kanal s prijenosnom funkcijom HC(f).U vremenskom području, odgovarajući impulsni odzivi se dobiju inverznom Fo-urierovom transformacijom: hT (t), hR(t) i hC(t). Ukupni impulsni odzi sustavase dobije konvolucijom sva tri impulsna ozdiva, tj. he(t) = hT (t)⊗hC(t)⊗hR(t).Ulazni niz digitalnih podataka može se modelirati kao niz delta impulsa, čija

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 6
Slika 1.8: Model komunikacijskog sustava u osnovnom pojasu
površina predstavlja određeni digitalni simbol:
x(t) =∑n
I[n]δ(t− nTs), (1.2)
gdje I[n] može poprimiti neku od M razina, te na taj način predstavlja određenidigitalni simmbol u M -arnom digitalnom sustavu, a Ts je interval signalizacije,odnosno vrijeme potrebno za prijenos jednog digitalnog simbola. Izlazni valnioblik y(t) slijedi:
y(t) = x(t)⊗ he(t) =
(∑n
I[n]δ(t− nTs)
)⊗ he(t)
=∑n
I[n]he(t− nTs).
(1.3)
Uzimajući u obzir da je prijenosna funkcija komunikacijskog kanala, odnosnoimpulsni odziv hC(t) zadan, te da se na njega se ne može utjecati, preostaje naodgovarajući način modelirati impulsni odziv hT (t) i hR(t) s ciljem uklanjanjaISI.
1.2.1 Nyquistov kriterij za prijenos signala
Prema Nyquistovom kriteriju, potrebno je postići da je impulsni odziv he(t) ta-kav da svojom amplitudom ne utjeće na amplitudu susjednih simbola u trenutkuodlučivanja, odnosno he(t) treba ispunjavati sljedeći uvjet:
he(kTs) =
1, k = 0
0, k = 0,(1.4)
gdje su kTs trenuci u kojima se odlučuju pripadajući simboli. Dakle, potrebnoje odabrati prikladnu funkciju koja ispunjava uvjet definiran relacijom (1.4).Funkcija koja ispunjava traženi uvjet je funkcija oblika sin(x)/x:
he(t) =sin πt
Ts
πtTs
(1.5)
gdje je fs brzina prijenosa simbola u jedinici vremena, odnosno Ts = 1/fs in-terval signalizacije. Relacija (1.5) zadovoljava uvjet iz relacije (1.4). Na slici 1.9je prikazan valni oblik he(t). Fourierovom transformacijom valnog oblika (1.5)
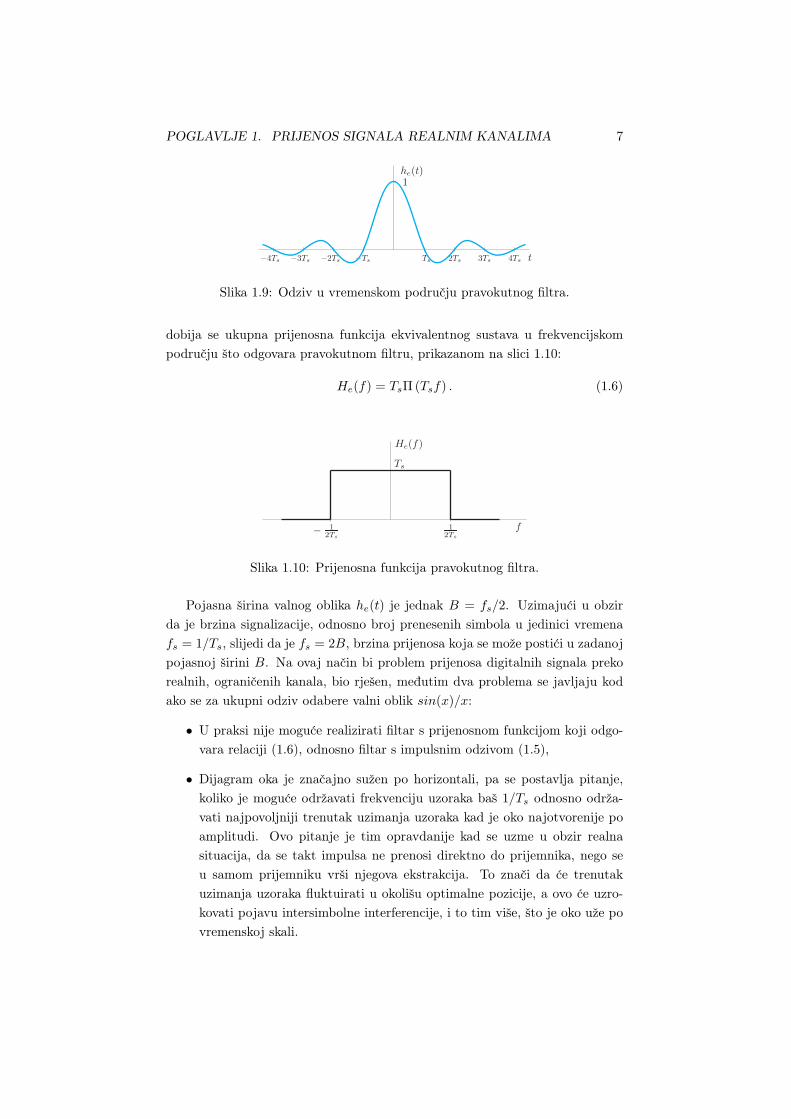
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 7
Slika 1.9: Odziv u vremenskom području pravokutnog filtra.
dobija se ukupna prijenosna funkcija ekvivalentnog sustava u frekvencijskompodručju što odgovara pravokutnom filtru, prikazanom na slici 1.10:
He(f) = TsΠ(Tsf) . (1.6)
Slika 1.10: Prijenosna funkcija pravokutnog filtra.
Pojasna širina valnog oblika he(t) je jednak B = fs/2. Uzimajući u obzirda je brzina signalizacije, odnosno broj prenesenih simbola u jedinici vremenafs = 1/Ts, slijedi da je fs = 2B, brzina prijenosa koja se može postići u zadanojpojasnoj širini B. Na ovaj način bi problem prijenosa digitalnih signala prekorealnih, ograničenih kanala, bio rješen, međutim dva problema se javljaju kodako se za ukupni odziv odabere valni oblik sin(x)/x:
• U praksi nije moguće realizirati filtar s prijenosnom funkcijom koji odgo-vara relaciji (1.6), odnosno filtar s impulsnim odzivom (1.5),
• Dijagram oka je značajno sužen po horizontali, pa se postavlja pitanje,koliko je moguće održavati frekvenciju uzoraka baš 1/Ts odnosno održa-vati najpovoljniji trenutak uzimanja uzoraka kad je oko najotvorenije poamplitudi. Ovo pitanje je tim opravdanije kad se uzme u obzir realnasituacija, da se takt impulsa ne prenosi direktno do prijemnika, nego seu samom prijemniku vrši njegova ekstrakcija. To znači da će trenutakuzimanja uzoraka fluktuirati u okolišu optimalne pozicije, a ovo će uzro-kovati pojavu intersimbolne interferencije, i to tim više, što je oko uže povremenskoj skali.
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 8
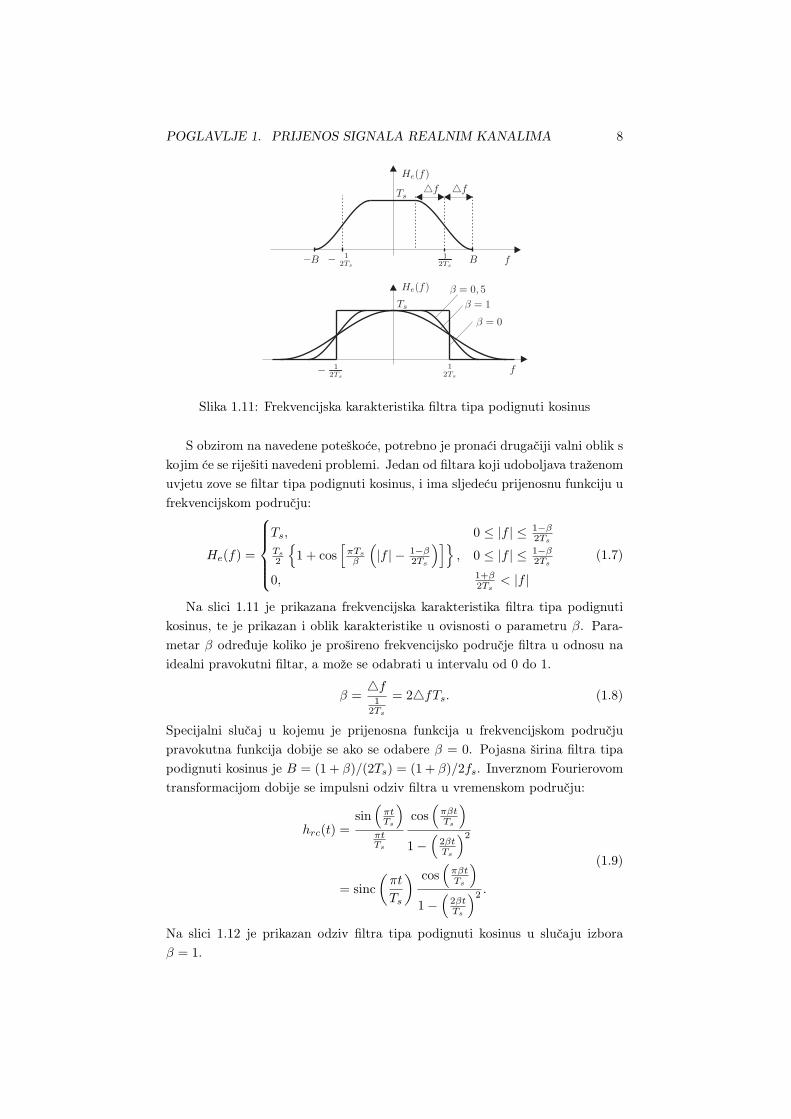
Slika 1.11: Frekvencijska karakteristika filtra tipa podignuti kosinus
S obzirom na navedene poteškoće, potrebno je pronaći drugačiji valni oblik skojim će se riješiti navedeni problemi. Jedan od filtara koji udoboljava traženomuvjetu zove se filtar tipa podignuti kosinus, i ima sljedeću prijenosnu funkciju ufrekvencijskom području:
He(f) =
Ts, 0 ≤ |f | ≤ 1−β
2Ts
Ts
2
{1 + cos
[πTs
β
(|f | − 1−β
2Ts
)]}, 0 ≤ |f | ≤ 1−β
2Ts
0, 1+β2Ts
< |f |
(1.7)
Na slici 1.11 je prikazana frekvencijska karakteristika filtra tipa podignutikosinus, te je prikazan i oblik karakteristike u ovisnosti o parametru β. Para-metar β određuje koliko je prošireno frekvencijsko područje filtra u odnosu naidealni pravokutni filtar, a može se odabrati u intervalu od 0 do 1.
β =△f1
2Ts
= 2△fTs. (1.8)
Specijalni slučaj u kojemu je prijenosna funkcija u frekvencijskom područjupravokutna funkcija dobije se ako se odabere β = 0. Pojasna širina filtra tipapodignuti kosinus je B = (1 + β)/(2Ts) = (1 + β)/2fs. Inverznom Fourierovomtransformacijom dobije se impulsni odziv filtra u vremenskom području:
hrc(t) =sin(
πtTs
)πtTs
cos(
πβtTs
)1−
(2βtTs
)2= sinc
(πt
Ts
) cos(
πβtTs
)1−
(2βtTs
)2 .(1.9)
Na slici 1.12 je prikazan odziv filtra tipa podignuti kosinus u slučaju izboraβ = 1.
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 9
Slika 1.12: Odziv u vremenskom području filtra tipa podignuti kosinus
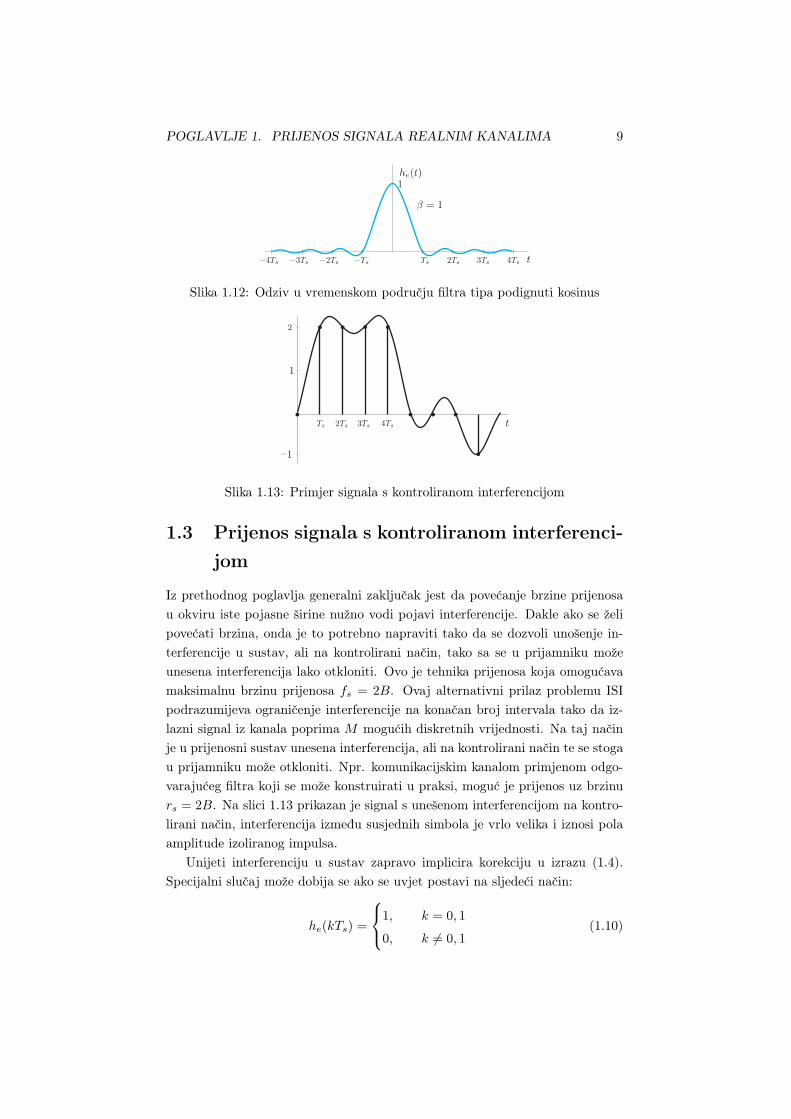
Slika 1.13: Primjer signala s kontroliranom interferencijom
1.3 Prijenos signala s kontroliranom interferenci-jom
Iz prethodnog poglavlja generalni zaključak jest da povećanje brzine prijenosau okviru iste pojasne širine nužno vodi pojavi interferencije. Dakle ako se želipovećati brzina, onda je to potrebno napraviti tako da se dozvoli unošenje in-terferencije u sustav, ali na kontrolirani način, tako sa se u prijamniku možeunesena interferencija lako otkloniti. Ovo je tehnika prijenosa koja omogućavamaksimalnu brzinu prijenosa fs = 2B. Ovaj alternativni prilaz problemu ISIpodrazumijeva ograničenje interferencije na konačan broj intervala tako da iz-lazni signal iz kanala poprima M mogućih diskretnih vrijednosti. Na taj načinje u prijenosni sustav unesena interferencija, ali na kontrolirani način te se stogau prijamniku može otkloniti. Npr. komunikacijskim kanalom primjenom odgo-varajućeg filtra koji se može konstruirati u praksi, moguć je prijenos uz brzinurs = 2B. Na slici 1.13 prikazan je signal s unešenom interferencijom na kontro-lirani način, interferencija između susjednih simbola je vrlo velika i iznosi polaamplitude izoliranog impulsa.
Unijeti interferenciju u sustav zapravo implicira korekciju u izrazu (1.4).Specijalni slučaj može dobija se ako se uvjet postavi na sljedeći način:
he(kTs) =
1, k = 0, 1
0, k = 0, 1(1.10)

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 10
Slika 1.14: Duobinarni impuls
U vremenskom području funkcija koja ispunjava navedeni uvjet je:
he(t) =sin[ π
Tst]
πTst
+sin[ π
Ts(t− Ts)]
πTs(t− Ts)
. (1.11)
Fourierovom transformacijom funkcije (1.12) dobija se u frekvencijskom podru-čju:
He(f) =
2Tse−j2πTsf cos(πTsf), |f | < 1
2Ts
0, |f | ≥ 12Ts
(1.12)
Dobiveni impuls naziva se duobinarni impuls, i prikazan je na slici 1.14 Ovakavfilter se može u praktičnoj izvedbi vrlo dobro aproksimirati. Brzina prijenosakoje se ostvaruje koristeći navedeni filter fs = 2B, uz prisustvo kontroliraneinterferencije. Osim navedenog filtra, za realizaciju sustava s kontroliranominterferencijom može se koristiti i filtar sljedećeg impulsnog odziva:
he(t) =sin[ π
Ts(t+ Ts)]
πTs(t+ Ts)
−sin[ π
Ts(t− Ts)]
πTs(t− Ts)
(1.13)
Odgovarajući odziv u frekvencijskom području dobije se Fourierovom transfor-macijom:
He(f) =
2jTs sin(2πTsf), |f | < 12Ts
0, |f | ≥ 12Ts
(1.14)
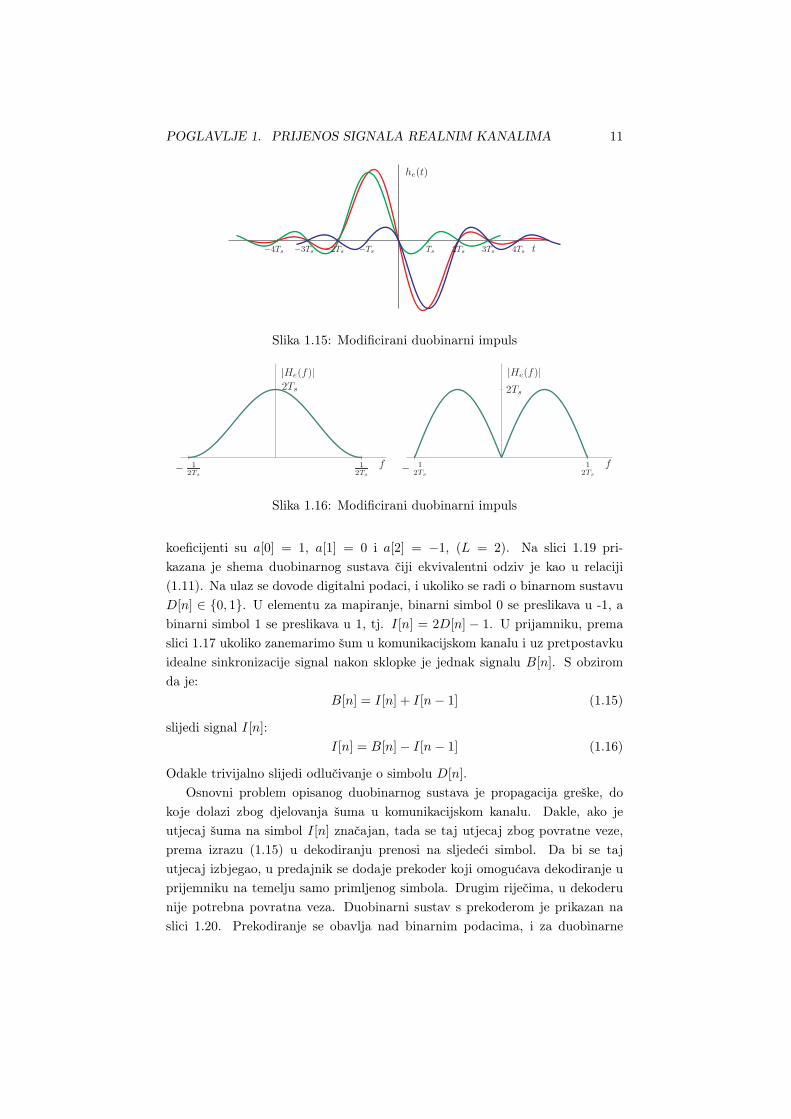
Dobiveni valni oblik se naziva modificirani duobinarni impuls, i prikazanje na slici 1.15. Na slici 1.16 prikazane su prijenosne funkcije (1.12 i 1.14) ufrekvencijskom području. S obzirom da prijenosna funkcija u 0 ima vrijednost0, navedeni filtar ne propušta istosmjernu komponentu signala.
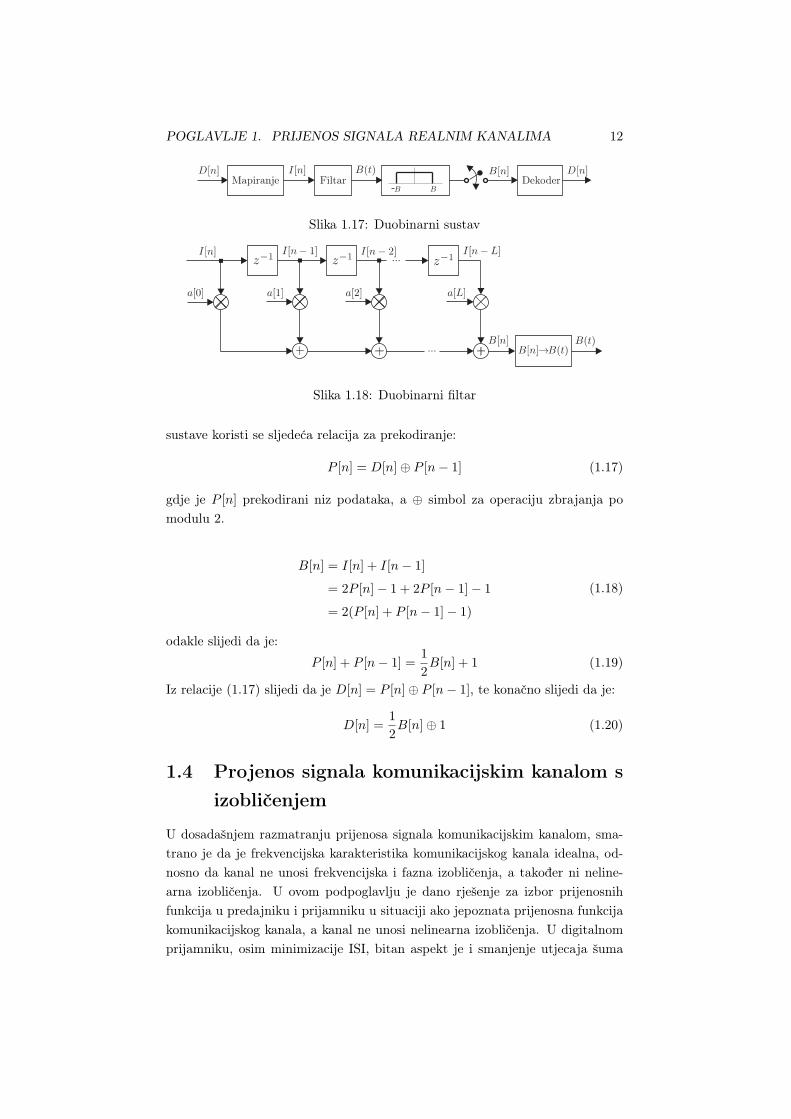
Analizirajući izraze (1.11) i (1.13) može se lako zaključiti da je isti valnioblik moguće dobiti i sa pravokutnim filtrom ako se postavi odgovarajući line-arni diskretni sustav ispred ulaza u pravokutni filtar. Na slikama 1.17 i 1.18prikazana je opća ekvivalentna shema duobinarnog sustava i pripadajući filtar.Na izlazu iz filtra je niz delta impulsa koji se dobijaju iz diskretnog dignalaB(t) =
∑n B[n]δ(t − nTs). Za impulsni odziv prema relaciji (1.11), odgo-
varajući koeficijenti su a[0] = 1 i a[1] = 1, (L = 1) a u slučaju odziva (1.13)
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 11
Slika 1.15: Modificirani duobinarni impuls
Slika 1.16: Modificirani duobinarni impuls
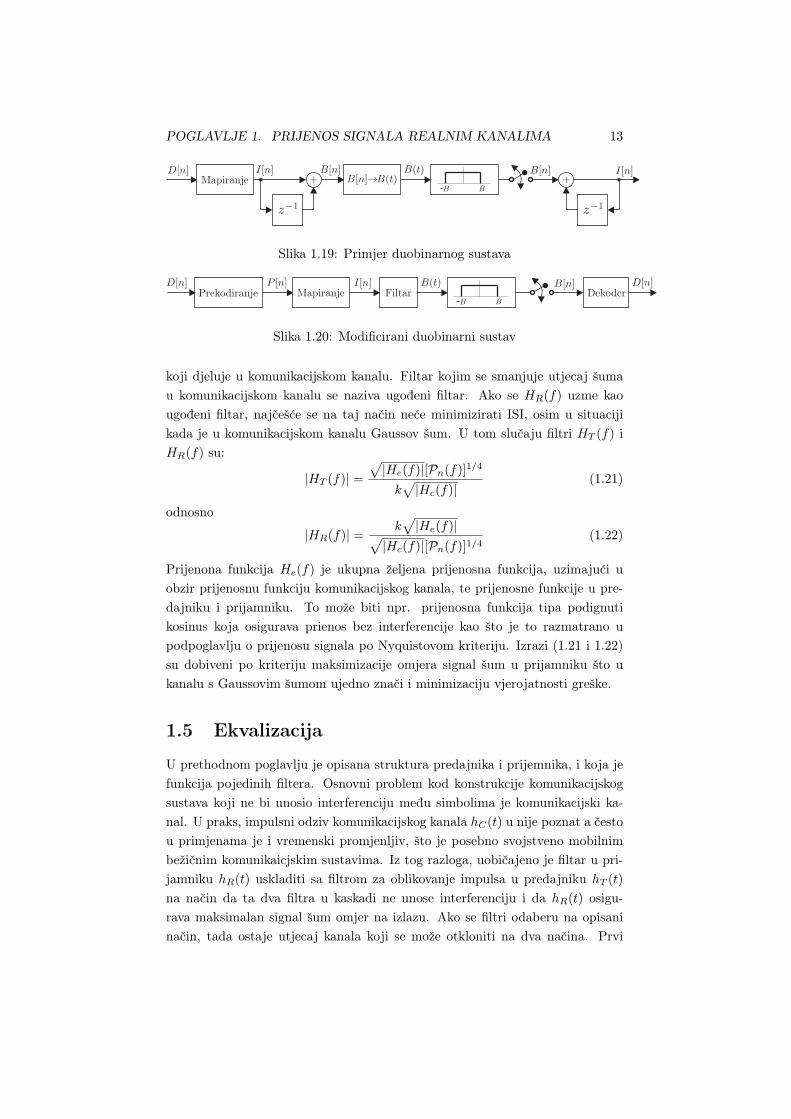
koeficijenti su a[0] = 1, a[1] = 0 i a[2] = −1, (L = 2). Na slici 1.19 pri-kazana je shema duobinarnog sustava čiji ekvivalentni odziv je kao u relaciji(1.11). Na ulaz se dovode digitalni podaci, i ukoliko se radi o binarnom sustavuD[n] ∈ {0, 1}. U elementu za mapiranje, binarni simbol 0 se preslikava u -1, abinarni simbol 1 se preslikava u 1, tj. I[n] = 2D[n] − 1. U prijamniku, premaslici 1.17 ukoliko zanemarimo šum u komunikacijskom kanalu i uz pretpostavkuidealne sinkronizacije signal nakon sklopke je jednak signalu B[n]. S obziromda je:
B[n] = I[n] + I[n− 1] (1.15)
slijedi signal I[n]:I[n] = B[n]− I[n− 1] (1.16)
Odakle trivijalno slijedi odlučivanje o simbolu D[n].Osnovni problem opisanog duobinarnog sustava je propagacija greške, do
koje dolazi zbog djelovanja šuma u komunikacijskom kanalu. Dakle, ako jeutjecaj šuma na simbol I[n] značajan, tada se taj utjecaj zbog povratne veze,prema izrazu (1.15) u dekodiranju prenosi na sljedeći simbol. Da bi se tajutjecaj izbjegao, u predajnik se dodaje prekoder koji omogućava dekodiranje uprijemniku na temelju samo primljenog simbola. Drugim riječima, u dekoderunije potrebna povratna veza. Duobinarni sustav s prekoderom je prikazan naslici 1.20. Prekodiranje se obavlja nad binarnim podacima, i za duobinarne
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 12
Slika 1.17: Duobinarni sustav
Slika 1.18: Duobinarni filtar
sustave koristi se sljedeća relacija za prekodiranje:
P [n] = D[n]⊕ P [n− 1] (1.17)
gdje je P [n] prekodirani niz podataka, a ⊕ simbol za operaciju zbrajanja pomodulu 2.
B[n] = I[n] + I[n− 1]
= 2P [n]− 1 + 2P [n− 1]− 1
= 2(P [n] + P [n− 1]− 1)
(1.18)
odakle slijedi da je:
P [n] + P [n− 1] =1
2B[n] + 1 (1.19)
Iz relacije (1.17) slijedi da je D[n] = P [n]⊕ P [n− 1], te konačno slijedi da je:
D[n] =1
2B[n]⊕ 1 (1.20)
1.4 Projenos signala komunikacijskim kanalom sizobličenjem
U dosadašnjem razmatranju prijenosa signala komunikacijskim kanalom, sma-trano je da je frekvencijska karakteristika komunikacijskog kanala idealna, od-nosno da kanal ne unosi frekvencijska i fazna izobličenja, a također ni neline-arna izobličenja. U ovom podpoglavlju je dano rješenje za izbor prijenosnihfunkcija u predajniku i prijamniku u situaciji ako jepoznata prijenosna funkcijakomunikacijskog kanala, a kanal ne unosi nelinearna izobličenja. U digitalnomprijamniku, osim minimizacije ISI, bitan aspekt je i smanjenje utjecaja šuma
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 13
Slika 1.19: Primjer duobinarnog sustava
Slika 1.20: Modificirani duobinarni sustav
koji djeluje u komunikacijskom kanalu. Filtar kojim se smanjuje utjecaj šumau komunikacijskom kanalu se naziva ugođeni filtar. Ako se HR(f) uzme kaougođeni filtar, najčešće se na taj način neće minimizirati ISI, osim u situacijikada je u komunikacijskom kanalu Gaussov šum. U tom slučaju filtri HT (f) iHR(f) su:
|HT (f)| =√
|He(f)|[Pn(f)]1/4
k√|Hc(f)|
(1.21)
odnosno
|HR(f)| =k√|He(f)|√
|Hc(f)|[Pn(f)]1/4(1.22)
Prijenona funkcija He(f) je ukupna željena prijenosna funkcija, uzimajući uobzir prijenosnu funkciju komunikacijskog kanala, te prijenosne funkcije u pre-dajniku i prijamniku. To može biti npr. prijenosna funkcija tipa podignutikosinus koja osigurava prienos bez interferencije kao što je to razmatrano upodpoglavlju o prijenosu signala po Nyquistovom kriteriju. Izrazi (1.21 i 1.22)su dobiveni po kriteriju maksimizacije omjera signal šum u prijamniku što ukanalu s Gaussovim šumom ujedno znači i minimizaciju vjerojatnosti greške.
1.5 Ekvalizacija
U prethodnom poglavlju je opisana struktura predajnika i prijemnika, i koja jefunkcija pojedinih filtera. Osnovni problem kod konstrukcije komunikacijskogsustava koji ne bi unosio interferenciju među simbolima je komunikacijski ka-nal. U praks, impulsni odziv komunikacijskog kanala hC(t) u nije poznat a čestou primjenama je i vremenski promjenljiv, što je posebno svojstveno mobilnimbežičnim komunikaicjskim sustavima. Iz tog razloga, uobičajeno je filtar u pri-jamniku hR(t) uskladiti sa filtrom za oblikovanje impulsa u predajniku hT (t)
na način da ta dva filtra u kaskadi ne unose interferenciju i da hR(t) osigu-rava maksimalan signal šum omjer na izlazu. Ako se filtri odaberu na opisaninačin, tada ostaje utjecaj kanala koji se može otkloniti na dva načina. Prvi

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 14
Slika 1.21: Komunikacijski sustav s ekvalizatorom
Slika 1.22: Komunikacijski sustav s ekvalizatorom i obojanim šumom
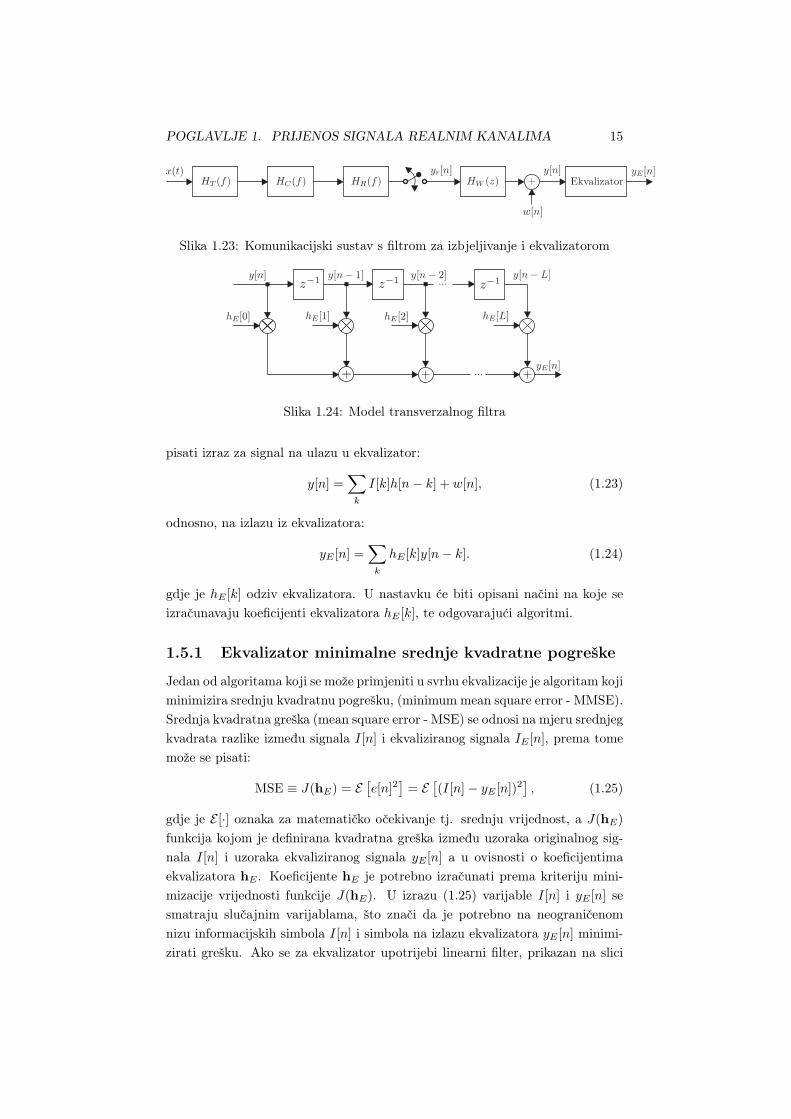
pristup je da se u adaptivni prijamnik implementira algoritam za procjenu ko-eficijenata kanala, koji se dalje mogu koristiti u npr. Viterbijevom algoritmučija je uloga otimalno dekodiranje primljene sekvence. Drugi pristup je da seu prijamniku implementira filtar, odnosno ekvalizator u ovom slučaju, čija jeuloga otklanjanje utjecaja komunikacijskog kanala. Na slici (1.21) je prikazanablok shema sustava s ekvalizatorom i uključenim izvorom bijelog šuma u kanalu.U svrhu definiranja prijenosne funkcije i svojstava ekvalizatora potrebno je de-finirati ekvivalentan model koji je prikladan za analizu. Bijeli, Gaussov šumn(t) nakon filtriranja filtrom hR(t) postaje obojan, i uzorci šuma koji se dobijunakon sklopke n[m] = n(mTs) će biti korelirani, odnosno šum više nije bijelinego je obojan. Na slici (1.22) je prikazan ekvivalentan model s izvorom šumanakon filtra hR(t), međutim, šum z(t) je obojan. Uobičajeno se ekvalizator sas-toji od dva filtra. Prvi filtar izbjeljuje obojani šum, dakle otklanja korelacijumeđu uzorcima, a sljedeći filtar otklanja interferenciju među simbolima. Shemasustava u kojemu je prikazan i filtar za izbjeljivanje je prikazan na slici (1.23).Impulsni odziv filtra za izbjeljivanje je označen s HW (z), na čijem izlazu se dobi-jaju izbjeljeni uzorci šuma w[n]. Na ovaj način je dobivena ekvivalentna shemau kojoj je ulaz u ekvalizator bijeli šum. Prijenosna funkcija filtra za izbjeljivanjeovisi samo o prijenosnoj funkciji filtra HR(f) iz razloga što filtar HR(f) unosikorelaciju među susjednim uzorcima. Ekvalizator se uobičajeno izvodi kao tran-sverzalni filtar, što znači da uzorak na izlazu filtra ovisi o tekućem i prethodnimuzorcima. Na slici 1.24 je prikazana struktura transverzalnog filtra. Shemasustava prikladnog za analizu rada i svojstava ekvalizatora prikazana je na slici(1.25). Svi filtri, u predajniku i prijamniku uključivo s filtrom za izbjeljivanjesu zamijenjeni s ekvivalentnim diskretnim filtrom H(z), te je uključen i bijelišum. Uloga ekvalizatora je otklanjanje interferencije koja je modelirana filtromH(z), uz prisustvo šuma w[n], pri čemu treba voditi računa da je osnovni izvorinterferencije komunikacijski kanal s prijenosnom funkcijom HC(f). Može se
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 15
Slika 1.23: Komunikacijski sustav s filtrom za izbjeljivanje i ekvalizatorom
Slika 1.24: Model transverzalnog filtra
pisati izraz za signal na ulazu u ekvalizator:
y[n] =∑k
I[k]h[n− k] + w[n], (1.23)
odnosno, na izlazu iz ekvalizatora:
yE [n] =∑k
hE [k]y[n− k]. (1.24)
gdje je hE [k] odziv ekvalizatora. U nastavku će biti opisani načini na koje seizračunavaju koeficijenti ekvalizatora hE [k], te odgovarajući algoritmi.
1.5.1 Ekvalizator minimalne srednje kvadratne pogreške
Jedan od algoritama koji se može primjeniti u svrhu ekvalizacije je algoritam kojiminimizira srednju kvadratnu pogrešku, (minimum mean square error - MMSE).Srednja kvadratna greška (mean square error - MSE) se odnosi na mjeru srednjegkvadrata razlike između signala I[n] i ekvaliziranog signala IE [n], prema tomemože se pisati:
MSE ≡ J(hE) = E[e[n]2
]= E
[(I[n]− yE [n])
2], (1.25)
gdje je E [·] oznaka za matematičko očekivanje tj. srednju vrijednost, a J(hE)
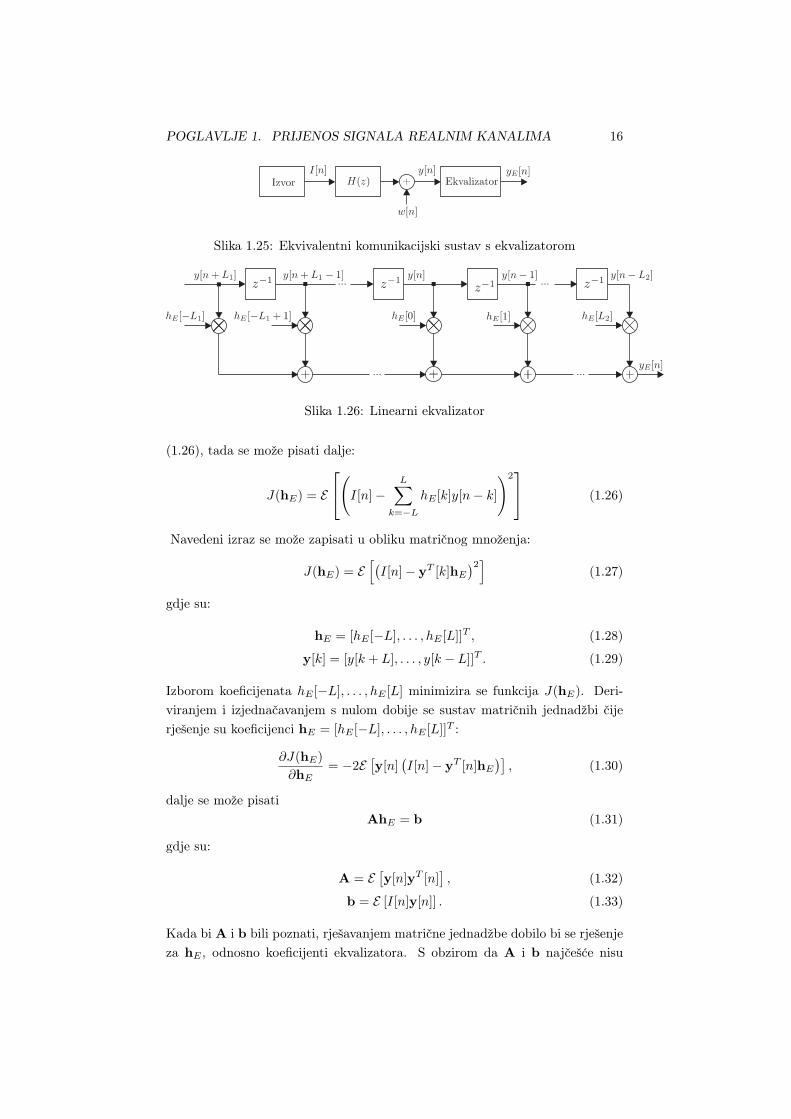
funkcija kojom je definirana kvadratna greška između uzoraka originalnog sig-nala I[n] i uzoraka ekvaliziranog signala yE [n] a u ovisnosti o koeficijentimaekvalizatora hE . Koeficijente hE je potrebno izračunati prema kriteriju mini-mizacije vrijednosti funkcije J(hE). U izrazu (1.25) varijable I[n] i yE [n] sesmatraju slučajnim varijablama, što znači da je potrebno na neograničenomnizu informacijskih simbola I[n] i simbola na izlazu ekvalizatora yE [n] minimi-zirati grešku. Ako se za ekvalizator upotrijebi linearni filter, prikazan na slici
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 16
Slika 1.25: Ekvivalentni komunikacijski sustav s ekvalizatorom
Slika 1.26: Linearni ekvalizator
(1.26), tada se može pisati dalje:
J(hE) = E
(I[n]− L∑k=−L
hE [k]y[n− k]
)2 (1.26)
Navedeni izraz se može zapisati u obliku matričnog množenja:
J(hE) = E[(I[n]− yT [k]hE
)2](1.27)
gdje su:
hE = [hE [−L], . . . , hE [L]]T , (1.28)
y[k] = [y[k + L], . . . , y[k − L]]T . (1.29)
Izborom koeficijenata hE [−L], . . . , hE [L] minimizira se funkcija J(hE). Deri-viranjem i izjednačavanjem s nulom dobije se sustav matričnih jednadžbi čijerješenje su koeficijenci hE = [hE [−L], . . . , hE [L]]
T :
∂J(hE)
∂hE= −2E
[y[n]
(I[n]− yT [n]hE
)], (1.30)
dalje se može pisatiAhE = b (1.31)
gdje su:
A = E[y[n]yT [n]
], (1.32)
b = E [I[n]y[n]] . (1.33)
Kada bi A i b bili poznati, rješavanjem matrične jednadžbe dobilo bi se rješenjeza hE , odnosno koeficijenti ekvalizatora. S obzirom da A i b najčešće nisu

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 17
poznati, rješenje se može dobiti iterativnim postupkom. J(hE) je kvadratnafunkcija vektora hE . Gradijent funkcije J(hE) s obzirom na vektor hE , tj.∇hE
(J(hE)), daje rješenje u kojem smjeru se funkcija J(hE) najbrže povećava.Iterativni algoritam je definiran sljedećim izrazom:
hE [n] = hE [n− 1]− µ∇hE(J(hE)[n− 1]) (1.34)
gdje je µ konstanta pomoću koje se definira brzina konvergencije algoritma.Gradijent je već izračunat neovisno o gradijentnom algoritmu, a rješenje je danou relaciji (1.30). Uvrštavajući rješenje (1.30) u izraz (1.34) dobija se:
hE [n] = hE [n− 1] + µ(b−AhE [n− 1]) (1.35)
S obzirom da matrice A i b nisu poznate u prijamniku, njihova procjena se možedobiti iz primljenog signala ako predajnik pošalje unaprijed definiranu treningsekvencu te konačno vrijedi:
hE [n] = hE [n− 1] + µ(I[n]− yT [n]hE [n− 1]
)y[n]. (1.36)
Opisani algoritam se naziva least mean square (LMS) algoritam.
1.5.2 LS ekvalizator
Kod MMSE ekvalizatora, podatkovna trening sekvenca je poznata u prijamnikui koeficijenti kanala se računaju temeljem statističkog prosjeka, prema relaciji(1.25). Umjesto statističkog prosjeka, može se minimizirati srednja kvadratnapogreška na ograničenom broju uzoraka, i taj pristup se naziva kriterij najmanjihkvadrata (least squares - LS). Prema tome, greška je:
J(hE)) = e2[N ] =
N∑n=1
(I[n]− yE [n])2
=N∑
n=1
(I[n]− yT [n]hE [N ]
)2 (1.37)
Deriviranjem po vektoru hE dobija se:
∂J(hE)
∂hE= −2
N∑n=1
y[n](I[n]− yT [n]hE [N ]
)(1.38)
odakle se izjednačavanjem s nulom dobija:
A[N ]hE [N ] = b[N ], (1.39)
gdje su:
A[N ] =N∑
n=1
y[n]yT [n],
b[N ] =N∑
n=1
I[n]y[n]. (1.40)

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 18
Rješavanjem sustava jednadžbi (1.39) dobija se procjena koeficijenata hE [N ]:
hE [N ] = A−1[N ]b[N ]. (1.41)
Ako se osigura i sljedeći trening simbol, u trenutku N +1, može se jednostavnoizračunati vrijednosti matrica A[N + 1] i b[N + 1] koristeći izraz (1.5.2):
A[N + 1] = A[N ] + y[N + 1]yT [N + 1],
b[N + 1] = b[N ] + I[N + 1]y[N + 1], (1.42)
odnosno procijenjena vrijednot hE [N + 1] je:
hE [N + 1] = A−1[N + 1]b[N + 1]. (1.43)
Uvrštavanjem izraza (1.5.2) u (1.43) i primjenom Woodburyevog identiteta, tj.(A−BDC)−1 = A−1 +A−1B(D−1 −CA−1B)CA−1, dobija se:
hE [N + 1] = hE [N ] +I[N + 1]− yT [N + 1]hE [N ]
1 + yT [N + 1]A−1[N ]y[N + 1]A−1[N ]y[N + 1] (1.44)
odnosno, za A−1[N + 1]:
A−1[N + 1] = A−1[N ]− A−1[N ]y[N + 1]yT [N + 1]A−1[N ]
1 + yT [N + 1]A−1[N ]y[N + 1]. (1.45)
Dobiveni algoritam naziva se rekurzivni algoritam najmanjih kvadrata (recursiveleast square - RLS). U prvoj iteraciji potrebno je pretpostaviti vrijednosti umatricama A−1[0] i hE [0], te je uobičajeno odabrati A−1[0] = αI, gdje je I
jedinična matrica, a α konstanta koja mora biti veliki broj, hE [0] = 0.
1.5.3 Algoritam s odlučivanjem u povratnoj vezi
Signal na ulazu u ekvalizator, prema slici 1.25 je y[k], odnosno ako se zanemaribijeli šum:
y[k] = I[k]h[0] +∑n=0
I[k − n]h[n]. (1.46)
Kada bi bili poznati koeficijenti kanala h[k], ekvalizirani signal bi se mogaodobiti na sljedeći način:
I[k] ≡ y[k]−∑k =n
I[k − n]h[n]. (1.47)
S obzirom da koeficijenti kanala nisu poznati, iz navedenog izraza može se defi-nirati ekvivalentna struktura ekvalizatora, na čijem izlazu je ekvalizirani signalyE [n]:
yE [k] =
L2∑k=−L1
y[k − n]hE [n]
=0∑
n=−L1
y[k − n]hE [n] +
L2∑n=1
y[k − n]hE [n]
(1.48)

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 19
Analizirajući izraz (1.48) može se uočiti da se lijeva suma odnosi na budućesimbole koji će se odlučivati, a desna suma se odnosi na simbole koji su većodlučeni, pa ih možemo označiti s varijablom IE [·]. Prema tome, može se pisati:
yE [k] =0∑
n=−L1
y[k − n]hE [n] +
L2∑n=1
IE [k − n]hE [n]
=
0∑n=−L1
y[k − n]hF [n] +
L2∑n=1
IE [k − n]hB[n].
(1.49)
gdje je hF [n] = hE [n], n ≤ 0 odnosno hB[n] = hE [n], n > 0. Ovaj princip ekva-lizacije signala nazivamo ekvalizacija s odlučivanjem u povratnoj vezi. Dobiveniizraz može se zapisati u matričnom obliku:
IE [k] = yT [k]hF + ITE [k]hB (1.50)
gdje su:
y[k] = [y[k + L1], . . . , y[k]]T ,
IE [k] = [IE [k − 1], . . . , IE [k − L2]]T ,
hF = [hF [−L1], . . . , hF [0]]T ,
hB = [hF [1], . . . , hB[L2]]T .
(1.51)
Dalje, neka su:
yFB [k] =[yT [k] ITE [k]
]T, hE = [hF hB ]
T. (1.52)
odnosno:IE [k] = yT
FB [k]hE (1.53)
Na isti način kao kod MSE ekvalizatora mogu se izračunati koeficijenti hE (1.25).
J(hE) = E[e[k]2
]= E
[(I[k]− yE [k])
2]
= E[(I[k]− yT
FB [k]hE
)2].
(1.54)
potrebno je odabrati odgovarajući hE koji će minimizirati funkciju J(hE). De-riviranjem po varijabli hE se dobija:
∂J(hE)
∂hE= −2E
[yFB [k](I[n]− yT
FB [n]hE)]= 0, (1.55)
dalje, neka su:A = E
[yTFB [k]yFB [k]
], (1.56)
b = E[I[n]yT
FB [n]]. (1.57)
odakle slijedi rješenje kao u slučaju MMSE ekvalizatora, izrazi (1.31) i (1.36),pa slijedi:
hE [k + 1] = hE [k] + µ(b−AhE [k]), (1.58)

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 20
S obzirom da matrice A i b nisu poznate u prijamniku, njihova procjena se možedobiti iz primljenog signala ako predajnik pošalje unaprijed definiranu treningsekvencu te konačno slijedi:
hE [k] = hE [k − 1] + µ(I[k]− yT
FB [k]hE [k − 1])yFB [k]. (1.59)
1.5.4 Zero forcing ekvalizator
Zero Forcing metoda ekvalizacije polazi se od postavke da korelacija izmeđuulazne sekvence i ekvalizirane sekvence treba biti δ[0]. Razlog je jednostavan,naime u komunikacijskom sustavu u kojemu nema interferencije među simbo-lima primljeni signal, prema slici 1.26, y[n] = I[n] te ekvalizacija ne bi ni bilapotrebna. Nadalje, ako su susjedni simboli podatkovne sekvence I[n] nekoreli-rani tada vrijedi E [I[n]y[n+k]] = Aδ[0] gdje je A konstanta koja ovisi o srednjimsnagama signala I[n] i y[n]. Može se zaključiti da se ovaj kriterij može koristitikao kriterij za ekvalizaciju ali promatrajući signale I[n] i yE [n] ukoliko je pri-sutna interferencija među simbolima tj: E [I[n]yE [n+ k]] = Aδ[0]. Uzimajući uobzir da susjedni simboli podatkovne sekvence I[n] nisu korelirani, odnosno daje E [I[n]I[n+ k]] ≡ δ[0] može se pisati sljedeće:
E [I[n]yE [n+ k]] ≡ E [I[n]I[n+ k]], (1.60)
odakle slijedi:E [I[n]e[n+ k]] = 0, k = −L, . . . , L, (1.61)
gdje je e[n] greška, odnosno razlika između podatkovnog signala I[n] i ekvalizira-nog signala yE [n]. S obzirom da ekvalizator ima konačnu memoriju, postavljenikriterij se može realizirati samo za interval −L ≤ k ≤ L. Postavljenom kriterijumože se približiti odgovarajućim izborom koeficijenata ekvalizatora hE . Jed-nostavan rekurzivni algoritam omogućava da se iterativnim postupkom odredekoeficijenti ukoliko se poznaje podatkovna sekvenca I[n]. To znači da je po-trebna unaprijed definirana trening sekvenca određene duljine koju poznaje iprijamnik da bi se odredili koeficijenti ekvalizatora.
hE [n+ 1] = hE [n] + µe[n]I[n]
= hE [n] + µ (I[n]− yE [n]) I[n]
= hE [n] + µ(I[n]− yT [n]hE [n]
)I[n]
(1.62)
gdje je greška procjenjena prema izrazu I[n]− yT [n]hE [n] iz unaprijed poznatesekvence I[n], odgovarajućih primljenih simbola y[n] i koeficijenata ekvalizatoraizračunatih u prethodnoj iteraciji hE [n]. Odgovarajući vektori su definirani nasljedeći način:
hE [n] = [hE [−L], . . . , hE [L]]T , (1.63)
y[n] = [y[n+ L], . . . , y[n− L]]T , (1.64)
I[n] = [I[n+ L], . . . , I[n− L]]. (1.65)

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 21
U većini opisanim algoritmima za ekvalizaciju javlja se parametar µ, od-nosno konstanta koja se proizvoljno bira, čime se utječe na brzinu konvergencijealgoritma. Izborom veće vrijednosti postiže se brža konvergencija ali s drugestrane veća je greška u procjeni samih koeficijenata. Po svojstvima, izdvaja seRLS algoritam jer brzo postiže konvergenciju i ima malu grešku u procjeni anedostatak mu je složenost izvedbe.
1.6 Zadaci
1.1 Skicirajte signal i konstruirajte odgovarajući dijagram oka za linearni PAM sig-nal uz zadani niz podataka: 1011100010. Gdje je signal oblika unipolarnogimpulsa p(t).
p(t) =
cos2(
πt2Tb
), |t| ≤ Tb
0, |t| > Tb
(1.66)
Rješenje. ovo je rjesenje
1.2 Skicirajte oblik prijemnog signala za binarni niz 1011 koji se prenosi kanalombrzinom r pojasne širine:(a) B = 2
3r
(b) B = 12r
Izračunajte vrijednosti signala i trenucima uzorkovanja uz pretpostavku da jeuspostavljen sinkronizam. Kanal je modeliran idealnim filtrom, a ulazni podacidelta impulsima.(a) B = 2
3r
(b) B = 12r
1.3 Skicirajte oblik prijemnog signala za binarni niz 1101 u slučaju prijenosa uskladu s II Nyquistovim kriterijem. Izračunajte vrijednost uzoraka signala utrenucima T i 1.1T . Neka je r brzina prijenosa, T vrijeme između dva susjednaimpulsa a B pojasna širina.Rješenje. Zahtjevi koji trebaju biti zadovoljeni da bi se osigurao prijenos uskladu s drugim Nyquistovim kriterijem su sljedeći:
h(t) =
1, t = 0
0, t = ±T,±2T, . . .(1.67)
H(f) = 0, . . . |f | ≥ B (1.68)
1.4 Binarni podaci prenose se kao impulsi oblika p(t) = u(t) − u(t − Tb) sustavomčiji je odziv h(t) = K0bexp(−bt), uz b = 2/Tb.
(a) Skicirati oblik prijamnog signala y(t) i odrediti iznos konstante K0 tako dabude y(Tb) = 1.

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 22
(b) Skicirati oblik prijamnog signala za ulazni niz simbola 1011.
(c) Skiciraj dijagram oka.
1.5 Računalo generira binarne riječi dužine 16 bita/riječi frekvencijom od 20000riječi u sekundi.(a) Izračunaj potrebnu širinu pojasa B za prijenos u obliku binarnog PAM
signala u skladu s prvim Nyquistovim kriterijem.
(b) Odredi broj razina M tako da se izlazni signal može prenositi kao M–arnisignal preko kanala širine pojasa BM = 60 kHz.
1.6 Digitalni čitač generira 3000 simbola u sekundi. Postoji 128 različitih sim-bola.(a) Odredi potrebnu širinu frekvencijskog pojasa B za prijenos u obliku binar-
nog PAM signala u skladu s prvim Nyquistovim kriterijem.
(b) Odredi broj razina M tako da se signal može prenositi telefonskim kanalomširine pojasa B = 3000 Hz.
1.7 Skicirajte oblik duobinarnog sustava na jedan i dva uzastopna jedinična impulsa.Prijenosna funkcija kanala u frekvencijskom području je H(f):
H(f) =
2Ts cos(πfTs), |f | ≤ 12Ts
0, |f | > 12Ts
1.8 Skicirajte oblik signala u označenim točkama A, B, C i D duobinarnog sustavaprikazanog na slici ako je zadan ulazni niz 111010001000.
1.9 Izračunati signale P [n], I[n], B[n] i D[n] u duobinarnom (M = 2) sustavu s pre-kodiranjem, koji je prikazan na slici 1.27 ako je zadani niz D = [111010001000].Vrijedi da je I[n] = 2P [n]− (M − 1) te D[n] =
(12B[n]
)⊕ (M − 1),modM .
Slika 1.27: Višerazinski sustav s prekodiranjem
1.10 Izračunati signale P [n], I[n], B[n] i D[n] u duobinarnom (M = 2) sustavus prekodiranjem, koji je prikazan na slici 1.27 ako je zadan ulazni niz D =
[111010001000]. Vrijedi da je I[n] = 2P [n]− (M − 1) te D[n] = 12B[n],modM .
Neka je P [−1] = 0, a I[−1] = 3
1.11 Za M razinski sustav s prekodiranjem ako su B[n] = I[n] − I[n − 1] i I[n] =2P [n]− (M − 1) pokazati da vrijedi: D[n] = 1
2B[n],modM .

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 23
Slika 1.28: Višerazinski sustav s prekodiranjem
1.12 Skicirati oblik odziva modificiranog duobinarnog sustava na jedinični impuls.Prijenosna funkcija modificiranog duobinarnog sustava je:
H(f) =
jTs sin(2πTsf), |f | ≤ 12Ts
0, |f | > 12Ts
Upute: Izračunati i skicirati h(t) = IFT{H(f)} te izračunati vrijednosti signalah(kTs), k ∈ Z.
1.13 Skicirati oblik signala modificiranog duobinarnog sustava za zadani ulazni niz:111010001000.
1.14 Binarni signal podataka prenosi se u osnovnom pojasu. Odziv kanala opisan jeizrazom h(L) = 1 + 0.3L. U prijamaniku je primjenjen linearni ekvalizator s 3koeficijenta, korakom adaptacije △ = 0.1 uz koeficijent C0(0) = 1.(a) Skicirati niz uzoraka na izlazu kanala uz zadanu trening sekvencu: 1101011001
(b) Ako je primjenjen algoritam predznaka treba izračunati iznos koeficijenatanakon 5 iteracija. Skicirati procjenjeni niz vrijednosti, koeficijente, grešku,kvadratnu grešku i srednju kvadratnu grešku.
(c) Ponoviti zadatak pod (2) za modificirani algoritam predznaka.
(d) Izračunati odziv idealnog linearnog ekvalizatora.
(e) Za zadani niz podataka skicirati niz ekvaliziranih uzoraka signala uz pret-postavku da su koeficijenti ekvalizatora idealno adaptivni.
1.15 Binarni signal podataka prenosi se u osnovnom pojasu. Odziv kanala opisan jeizrazom: h(L) = 1 + 0.3 ∗ L. U prijamniku je primjenjen DFE ekvalizator s 3koeficijenta i korakom adaptacije △ = 0.1 i početnom vrijednošću C0(0) = 1.Zadan je ulazni niz podataka: 1101011001. Treba izračunati iznos koeficijenatanakon 5 iteracija zatim izračunati odziv idealnog DFE ekvalizatora i skiciratiizlazni niz.(a) Algoritmom predznaka
(b) LMS algoritmom.
1.16 Skicirati odgovarajući sekvencijalni krug i tablicu stanja za generator pseudos-lučajnog niza uz M = 3 i početno stanje dn−1 = 1, dn−2 = 1, dn−3 = 1 i C1 = 1,C2 = 0, C3 = 1.
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 24
1.17 Za skrembler s primitivnim polinomom trećeg stupnja skicirajte izlazni niz utablicu stanja. Ulazni niz je periodičan s periodom 011, a početno stanje jebn−1 = 1, bn−2 = 1, bn−3 = 0. Koliki je period izlaznog niza. C1 = 1, C2 = 0,C3 = 1.
1.18 Skicirati sekvencijalni krug za deskrembler, i ispišite tablicu stanja ako je zadanulazni niz podataka 01111100001000110010. Početno stanje je bn−1 = 1, bn−2 =
1, bn−3 = 1, a koeficijenti: C1 = 1, C2 = 0, C3 = 1.
1.19 Na slici je prikazan sklop za uspostavljanje takta prijenosnog signala. Sklopse temelji na povratnoj vezi prvog reda i procjeni fazne pogreške u skladu sizrazom ek = ℑ{qka
∗k}, a koristi se u 4–PSK prijamniku. Treba izračunati
iznos procjene faze iznos procjene faze prijamnog signala Φk nakon prijema niza110010011100. Fazni pomak u kanalu iznosi Θ(t) = π/6. Faktor pojačanja upovratnoj vezi KL = 0, 2.
1.20 Na ulaz sklopa za uspostaljanje takta metodom uzorkovanja derivacije dolazipolarni PAM signal. Oblik impulsa je p(t) = cos2(π ∗ t/Ts),−Ts/2 ≤ t ≤ Ts/2.Skicirajte funkciju ϕ(t) za t ∈ [0, 4Ts] i niz uzoraka prijamnog signala ako jeulazni niz podataka 11001 i početna faza ϕ0 = π/4.
1.21 Na ulaz sklopa za uspostavljanje takta metodom uzorkovanja s kašnjenjem iprednjačenjem dolazi polarni PAM signal. Oblik impulsa je p(t) = cos2(πt/Ts),−Ts/2 ≤t ≤ Ts/2. skicirajte funkciju ϕ(t) za t ∈ [0, 4Ts] i niz uzoraka prijamnog signalaako je ulazni niz podataka 10110, a početna faza ϕ0 = π/4, faktor pojačanja upovratnoj vezi KL = 0, 2 i △ϕ = π/8.
1.22 Analogni signal konvertiran PCM sustavom u digitalni se prenosi binarnim NRZlinijskim kodom. NRZ signal se prenosi komunikacijskim kanalom pojasne širine4 kHz. PCM kvantizator ima 16 razina kvantizacije, i prijenosna funkcija sustavaje podignuti kosinus rolloff koeficijenta r = 0, 5.(a) Kolika je maksimalna brzina PCM sustava (bit/s) koja se može postići u
slučaju prijenosa bez interferencije.
(b) Kolika je maksimalna pojasna širina analognog signala.
1.23 Višerazinski digitalni signal, brzine 2400 bit/s prenosi se komunikacijskim ka-nalom četverorazinskim linijskim signalom. Ukupna prijenosna funkcija sustavaje podignuti kosinus rolloff faktora r = 0, 5.(a) Kolika je brzina u simbolima.
(b) Kolika je ukupna pojasna širina komunikacijskog sustava.
1.24 Binarni valni oblik brzine 9600 bit/s se konvertira u 8–razinski signal, koji sedalje prenosi komunikacijskim kanalom čija prijenosna funkcija je podignuti ko-sinus, gornje granične frekvencije 2500 Hz.

POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 25
(a) Kolika je brzina u simbolima.
(b) Koliki je rolloff faktor prijenosne funkcije filtra.
1.25 Binarni komunikacijski sustav koristi polarnu signalizaciju. Ukupni impulsni od-ziv u sustavu je oblika sin(x)/x te nema interferencije među simbolima. Brzinaprijenosa podataka je 300 bit/s.(a) Kolika je pojasna širina?
(b) Skicirati valni oblik signala na izlazu sustava ako se prenosi sekvenca 001101101.
1.26 Neka je zadan filtar tipa podignuti kosinus.(a) Skicirati prijenosnu funkciju He(f) ako je rolloff faktor r = 0.75 te naznačiti
f0, f1 i B.
(b) Skicirati he(t) ako je rolloff faktor r = 0.75 te naznačiti 1/f0.
1.27 Da li sljedeće prijenosne funkcije filtara zadovoljavaju ili ne uvjet prijenosa bezinterferencije?(a) He(f) =
T0
2 Π(Tsf2 ).
(b) He(f) =T0
2 Π( 2Tsf3 ).
1.28 Neka je ukupna prijenosna funkcija komunikacijskog sustava filtar tipa podignutikosinus.(a) Odrediti pripadajuću Nyquistovu funkciju Y (f) za navedeni filtar.
(b) Skicirati funkciju Y (f) ako je r = 0.75.
1.29 Za kanal se kaže da je bez distorzije ako je odziv y(t) na ulaz x(t) jednak Kx(t−t0) gdje su K i t0 konstante. Pokazati, ako je frekvencijski odziv kanala jednakA(f)ejΘ(f), gdje su A(f) i Θ(f) realni, da su nužni i dovoljni uvjeti za prijenosbez distorzije A(f) = K i Θ(f) = 2πft0 ± nπ, n = 0, 1, . . . .
1.30 Neka se u komunikacijskom sustavu za prijenos digitalnih podataka koriste im-pulsi oblika Gaussove funkcije:
x(t) = e−πa2t2 (1.69)
Da bi se smanjila interferencija među simbolima na prihvatljiv iznos, vrijemeTs se bira tako da vrijedi x(Ts) = 0, 01 gdje je interval signalizacije. Pojasnaširina B impulsa x(t) je definirana kao ona vrijednost pri kojoj vrijedi da jeX(B)/X(0) = 0, 01 gdje je X(f) Fourierova transformacija od x(t). Odreditivrijednost B i usporediti dobivenu vrijednost sa pojasnom širinom filtra tipapodignuti – cosinus uz rolloff faktor r = 1.
1.31 Za prijenos digitalnih podataka brzinom 9600 bit/s na raspolaganju je komu-nikacijski kanal pojasne širine 4 kHz. Ako je 1
2N0 = 10−10 W/Hz spektralnagustoća aditivnog Gaussovog šuma srednje vrijednosti 0, treba odrediti srednju
POGLAVLJE 1. PRIJENOS SIGNALA REALNIM KANALIMA 26
snagu signala ako se podaci prenose QAM sustavom s vjerojatnošću greške 10−6.Signal se oblikuje filtrom tipa podignuti – cosinus s rolloff faktorom od barem50 %.
1.32 Idealni telefonski kanal ima pojasnopropusnu frekvencijsku karakteristiku, s do-njom graničnom frekvencijom od 600 Hz i gornjom od 3000 Hz.(a) Odrediti parametre M = 4 PSK sustava za prijenos podataka brzinom 2400
bit/s ako je frekvencija nosioca fc = 1800 Hz. Za spektralno oblikovanjeimpulsa koristiti filtar tipa podignuti – cosinus. Skicirati blok dijagram iopisati djelovanje svakok bloka.
(b) Ponoviti zadatak pod (a) za brzinu prijenosa R = 4800 bit/s.
1.33 Pojasnopropusni telefonski kanal zauzima frekvencijsko područje od 300 do 3300Hz. Odrediti parametre modema za prijenos digitalnih podataka zadanim ko-munikacijskim kanalom, ako je brzina prijenosa 2400 simbola/s, odnosno 9600bit/s. Odabrati odgovarajuću QAM konstelaciju signala, frekvenciju signalanosioca i faktor zaobljenja ako je koristi filtar tipa podignuti – cosinus koji upotpunosti iskorištava frekvencijski pojas. Skicirati spektar projektiranog filtrai naznačiti značjne frekvencije.
1.34 Komunikacijski kanal ima pojasnopropusnu frekvencijsku karakteristiku u frek-vencijskom pojasu 300Hz < f < 3000 Hz.(a) Odrediti brzinu u simbolima ako se navedenim komunikacijskim kanalom
prenose podaci brzinom 9600 bit/s.
(b) Ako se koristi filtar tipa podignuti kosinus za oblikovanje signala, kolikitreba biti faktor zaobljenja ako se u potpunosti želi iskoristiti frekvencijskipojas.
Poglavlje 2
Sinkronizacija
Budući u digitalnom komunikacijskom sustavu kašnjenje u propagacijskom ka-nalu nepoznato, za pouzdano određivanje trenutaka uzorkovanaja prijemnogsignala potrebno je uspostaviti sinkronizaciju između prijamnika i predajnika izprimljenog signala. Kašnjenje u propagaciji dovodi i do pomaka u frekvencijinosioca, koju je također potebno odrediti iz primljenog signala kod koherent-nog detektora. U ovom poglavlju će biti pojaš njene tehnike uspostave takta uprijamniku na razini nosioca i simbola.
2.1 Procjena parametara signala
U svrhu analize problema sinkronizacije, korisno je definirati matematički mo-del prijamnog signala s uključenim efektom kašnjenja propagacijskog signala iutjecaja šuma koji postoji u komunikacijskom kanalu. Primljeni signal se možeizraziti kao:
y(t) = x(t− τ) + n(t) (2.1)
gdje je:x(t) = ℜ[x(t)ej2πfct] (2.2)
gdje je τ kašnjenje u propagaciji, x(t) ekvivalentni signal u osnovnom pojasu, an(t) je šum. Uvrštavanjem izraza (2.1) u izraz (2.2) dobija se:
y(t) = ℜ{[x(t− τ)ejϕ + z(t)
]ej2πfct
}(2.3)
gdje je faza ϕ usljed kašnjenja τ jednaka ϕ = −2πfcτ . Iz dobivenog izraza moglobi se zaključiti da potrebno samo procjeniti vrijednost kašnjenja τ pa se iz togparametra može odrediti ϕ ako se zna frekvencija nosioca fc. Međutim, to nijeslučaj, pošto u prijamniku nije poznata faza nosioca fc, odnosno oscilatori zageneriranje signala nosioca u predajniku i prijamniku nisu usklađeni. Dakle,
27

POGLAVLJE 2. SINKRONIZACIJA 28
potrebno je procjeniti parametre τ i ϕ za ispravnu koherentnu demodulaciju.Primljeni signal je dakle dunkcija sljedećih parametara:
y(t) = x(t;ϕ, τ) + n(t) (2.4)
gdje su τ i ϕ parametri koji se procjenjuju. Neka je
• kriterij maksimalne podudarnosti (eng. maximum likelihood – ML)
• kriterij maksimalne aposteriorne vjerojatnosti (eng. maximum a posteri-ora probability – MAP)
MAP procjena se temelji na maksimizaciji aposteriorne funkcije gustoće vjero-jatnosti:
p(Ψ|r) = p(r|Ψ)p(Ψ)
p(r)(2.5)
Ako nema apriornog znanja o varijabli p(Ψ), odnosno ako je distribucija varija-ble Ψ ravnomjerna, onda MAP procjena postaje ML procjena, odnosno kod MLprocjene se maksimizira funkcija p(r|Ψ). Kod problema procjene parametara τ
i ϕ, pošto se radi o nepoznatim ali determinističkim parametrima, koristi se MLmetoda za procjenu.
2.1.1 Funkcija podudarnosti
Ortonormalnom ekspanzijom na N ortonormalnih funkcija {fn(t)}, prijamnisignal y(t) može se predstaviti pomoću koeficijenata r = (r1, r2, . . . , rN ). Bu-dući je n(t) aditivni Gaussov šum srednje vrijednosti 0, uzimajući u obzir izraz(2.4) združena funkcija gustoće vjerojatnosti p(r|Ψ) se može izraziti na sljedećinačin:
p(r|Ψ) =
(1√2πσ
)N
exp
(−
N∑n=1
[yn − xn(Ψ)]2
2σ2
)(2.6)
gdje su xn i sn koeficijenti ortonormalne ekspanzije, i mogu se izračunati nasljedeći način:
yn =
∫T0
y(t)fn(t)dt (2.7)
xn(Ψ) =
∫T0
s(t;Ψ)fn(t)dt (2.8)
gdje je T0 interval na kojem se računa ortonormalna ekspanzija funkcija y(t) ix(t;Ψ). Može se pokazati da vrijedi sljedeće:
1
2σ2=
N∑n=1
[yn − xn(t;Ψ)]2 =1
N0
∫T0
[y(t)− x(t;Ψ)]2dt (2.9)
POGLAVLJE 2. SINKRONIZACIJA 29
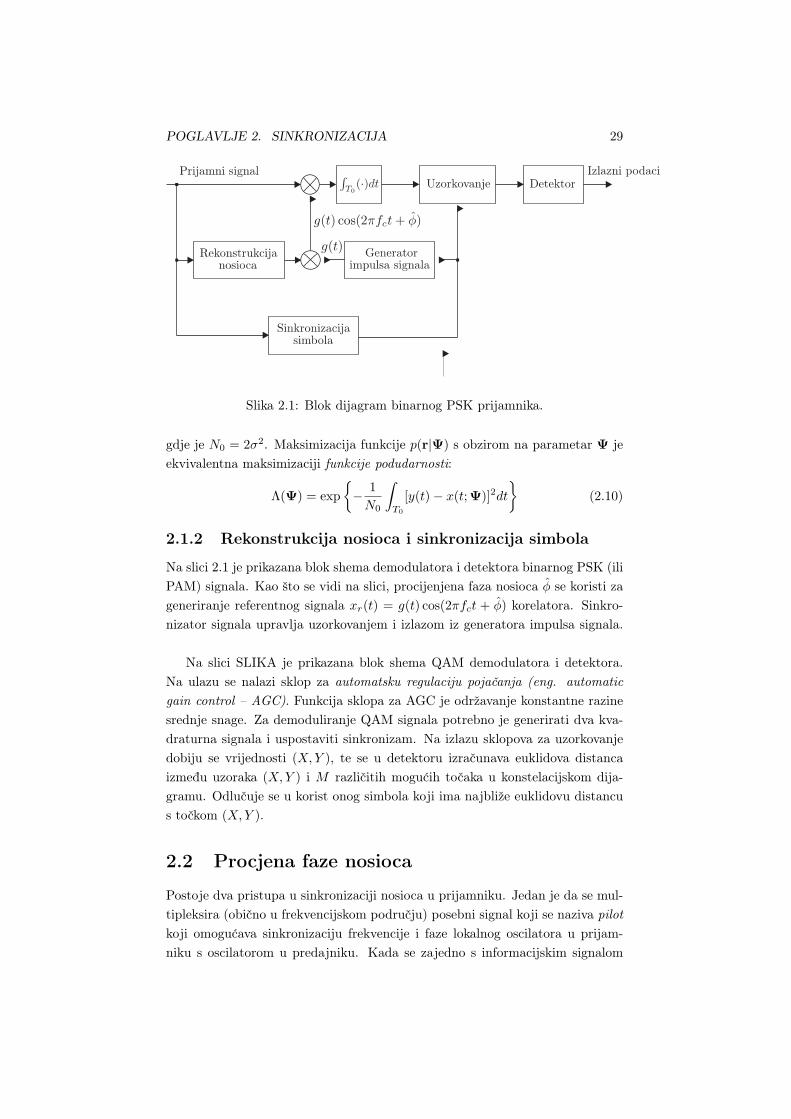
Slika 2.1: Blok dijagram binarnog PSK prijamnika.
gdje je N0 = 2σ2. Maksimizacija funkcije p(r|Ψ) s obzirom na parametar Ψ jeekvivalentna maksimizaciji funkcije podudarnosti:
Λ(Ψ) = exp
{− 1
N0
∫T0
[y(t)− x(t;Ψ)]2dt
}(2.10)
2.1.2 Rekonstrukcija nosioca i sinkronizacija simbola
Na slici 2.1 je prikazana blok shema demodulatora i detektora binarnog PSK (iliPAM) signala. Kao što se vidi na slici, procijenjena faza nosioca ϕ se koristi zageneriranje referentnog signala xr(t) = g(t) cos(2πfct + ϕ) korelatora. Sinkro-nizator signala upravlja uzorkovanjem i izlazom iz generatora impulsa signala.
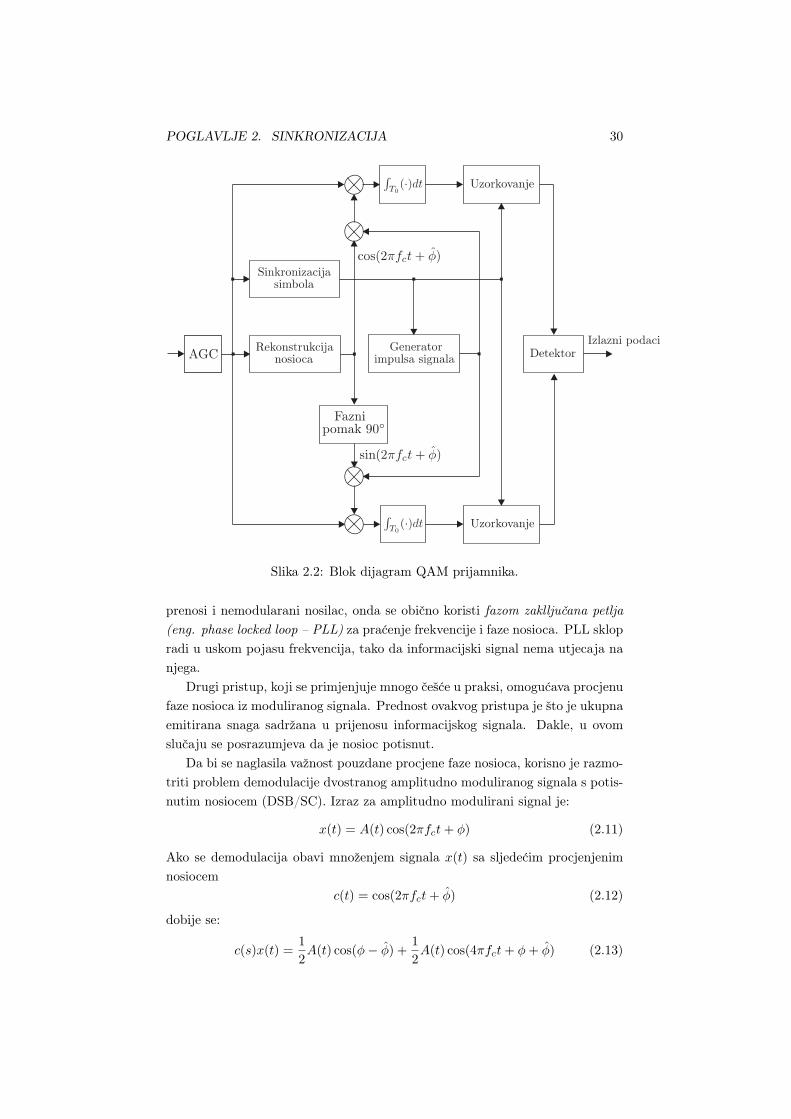
Na slici SLIKA je prikazana blok shema QAM demodulatora i detektora.Na ulazu se nalazi sklop za automatsku regulaciju pojačanja (eng. automaticgain control – AGC). Funkcija sklopa za AGC je održavanje konstantne razinesrednje snage. Za demoduliranje QAM signala potrebno je generirati dva kva-draturna signala i uspostaviti sinkronizam. Na izlazu sklopova za uzorkovanjedobiju se vrijednosti (X,Y ), te se u detektoru izračunava euklidova distancaizmeđu uzoraka (X,Y ) i M različitih mogućih točaka u konstelacijskom dija-gramu. Odlučuje se u korist onog simbola koji ima najbliže euklidovu distancus točkom (X,Y ).
2.2 Procjena faze nosioca
Postoje dva pristupa u sinkronizaciji nosioca u prijamniku. Jedan je da se mul-tipleksira (obično u frekvencijskom području) posebni signal koji se naziva pilotkoji omogućava sinkronizaciju frekvencije i faze lokalnog oscilatora u prijam-niku s oscilatorom u predajniku. Kada se zajedno s informacijskim signalom
POGLAVLJE 2. SINKRONIZACIJA 30
Slika 2.2: Blok dijagram QAM prijamnika.
prenosi i nemodularani nosilac, onda se obično koristi fazom zaklljučana petlja(eng. phase locked loop – PLL) za praćenje frekvencije i faze nosioca. PLL sklopradi u uskom pojasu frekvencija, tako da informacijski signal nema utjecaja nanjega.
Drugi pristup, koji se primjenjuje mnogo češće u praksi, omogućava procjenufaze nosioca iz moduliranog signala. Prednost ovakvog pristupa je što je ukupnaemitirana snaga sadržana u prijenosu informacijskog signala. Dakle, u ovomslučaju se posrazumjeva da je nosioc potisnut.
Da bi se naglasila važnost pouzdane procjene faze nosioca, korisno je razmo-triti problem demodulacije dvostranog amplitudno moduliranog signala s potis-nutim nosiocem (DSB/SC). Izraz za amplitudno modulirani signal je:
x(t) = A(t) cos(2πfct+ ϕ) (2.11)
Ako se demodulacija obavi množenjem signala x(t) sa sljedećim procjenjenimnosiocem
c(t) = cos(2πfct+ ϕ) (2.12)
dobije se:
c(s)x(t) =1
2A(t) cos(ϕ− ϕ) +
1
2A(t) cos(4πfct+ ϕ+ ϕ) (2.13)

POGLAVLJE 2. SINKRONIZACIJA 31
Komponenta s dvostrukom frekvencijom nosioca se eliminira noskopropusnimfiltrom, te se nakon filtriranja dobija:
y(t)x(t) =1
2A(t) cos(ϕ− ϕ) (2.14)
Može se zaključiti da je posljedica neidealne procjene faze u demodulaciji ate-nuacija amplitude modulacijskog signala A(t) za faktor cos(ϕ − ϕ), odnosnoatenuacija snage za cos2(ϕ − ϕ). Greška u fazi od 10◦ rezultira s prigušenjemsnage za 0,13 dB. Kod višerazinskih digitalnih modulacijskih postupaka QAMi MPSK greška u procjeni faze je još pogubnija pošto se javljaja preslušava-nje između fazne i kofazne komponente. Stoga je kod digitalnih modulacijskihpostupaka jako važna pouzdana procejna faze.
2.2.1 Procjena faze nosioca metodom maksimalne podu-darnosti
U narednom teksu će biti izveden izraz koji se temelji na metodui maksimalnepodudarnosti (ML procjena). Radi jednostavnosti, pretpostavka je da je kašnej-nje τ poznato, i da je jednako 0. Funkcija koju treba maksimizirati je definiranaizrazom (2.10), gdje je Ψ = ϕ. Dakle, vrijedi:
Λ(ϕ) = exp
{− 1
N0
∫T0
[y(t)− x(t;ϕ)]2dt
}= exp
{− 1
N0
∫T0
y2(t)dt+2
N0
∫T0
y(t)x(t;ϕ)dt− 1
N0
∫T0
x2(t;ϕ)dt
}(2.15)
Prvi član u izrazu (2.15) nije funkcija parametra ϕ, a treći ima konstantnuvrijednost koja je jednaka energiji signala u intervalu promatranja T0. Samodrugi član u kojem se računa korelacija između funkcija y(t) i x(t;ϕ) ovisi oizboru parametra ϕ. Stoga se funkcija podudarnosti Λ(ϕ) može dalje pisati kao:
Λ(ϕ) = C exp
{2
N0
∫T0
y(t)x(t;ϕ)dt
}(2.16)
gdje je C konstanta neovisna o ϕ.ML procjena parametra ϕML je vrijednost koja maksinmizira funkciju Λ(ϕ)
u izrazu (2.16). Ekvivalentno, parametar ϕML maksimizira logaritam funkcijeΛ(ϕ), odnosno log funkciju podudarnosti:
ΛL(ϕ) =2
N0
∫T0
y(t)x(t;ϕ)dt (2.17)
U izrazu (2.17) je ignorirana konstanta C jer ne utječe na rezultat.
POGLAVLJE 2. SINKRONIZACIJA 32
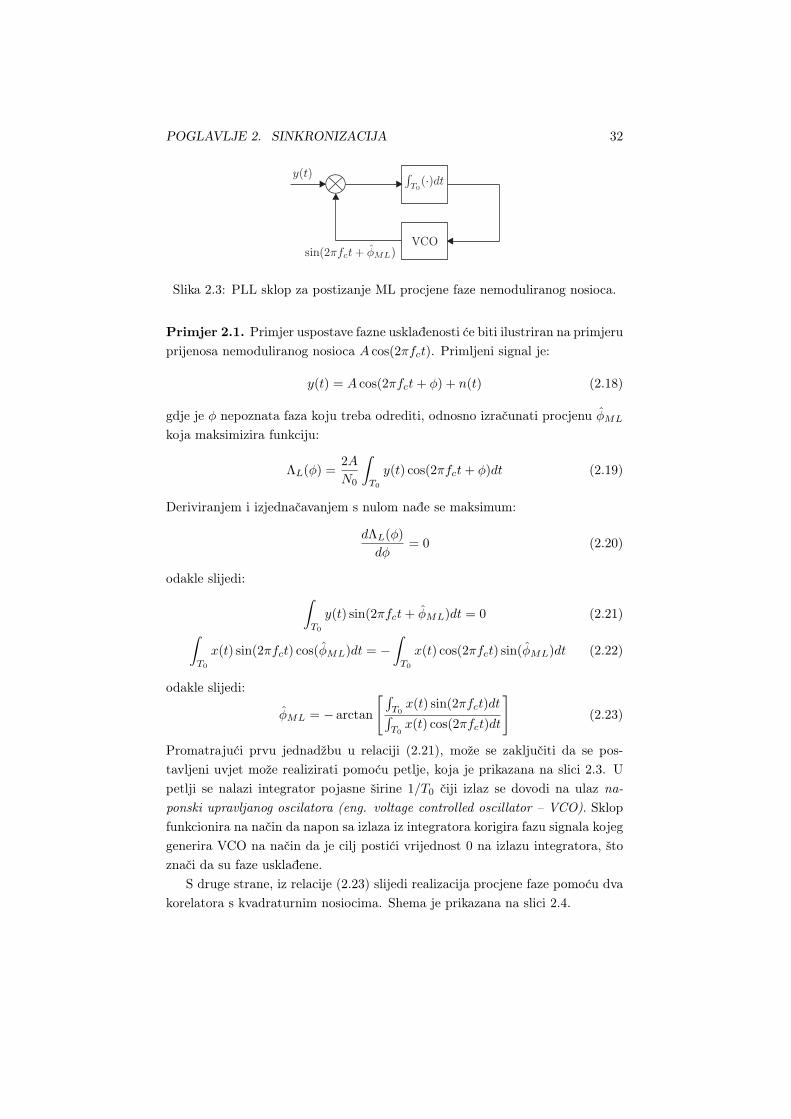
Slika 2.3: PLL sklop za postizanje ML procjene faze nemoduliranog nosioca.
Primjer 2.1. Primjer uspostave fazne usklađenosti će biti ilustriran na primjeruprijenosa nemoduliranog nosioca A cos(2πfct). Primljeni signal je:
y(t) = A cos(2πfct+ ϕ) + n(t) (2.18)
gdje je ϕ nepoznata faza koju treba odrediti, odnosno izračunati procjenu ϕML
koja maksimizira funkciju:
ΛL(ϕ) =2A
N0
∫T0
y(t) cos(2πfct+ ϕ)dt (2.19)
Deriviranjem i izjednačavanjem s nulom nađe se maksimum:
dΛL(ϕ)
dϕ= 0 (2.20)
odakle slijedi: ∫T0
y(t) sin(2πfct+ ϕML)dt = 0 (2.21)∫T0
x(t) sin(2πfct) cos(ϕML)dt = −∫T0
x(t) cos(2πfct) sin(ϕML)dt (2.22)
odakle slijedi:
ϕML = − arctan
[ ∫T0
x(t) sin(2πfct)dt∫T0
x(t) cos(2πfct)dt
](2.23)
Promatrajući prvu jednadžbu u relaciji (2.21), može se zaključiti da se pos-tavljeni uvjet može realizirati pomoću petlje, koja je prikazana na slici 2.3. Upetlji se nalazi integrator pojasne širine 1/T0 čiji izlaz se dovodi na ulaz na-ponski upravljanog oscilatora (eng. voltage controlled oscillator – VCO). Sklopfunkcionira na način da napon sa izlaza iz integratora korigira fazu signala kojeggenerira VCO na način da je cilj postići vrijednost 0 na izlazu integratora, štoznači da su faze usklađene.
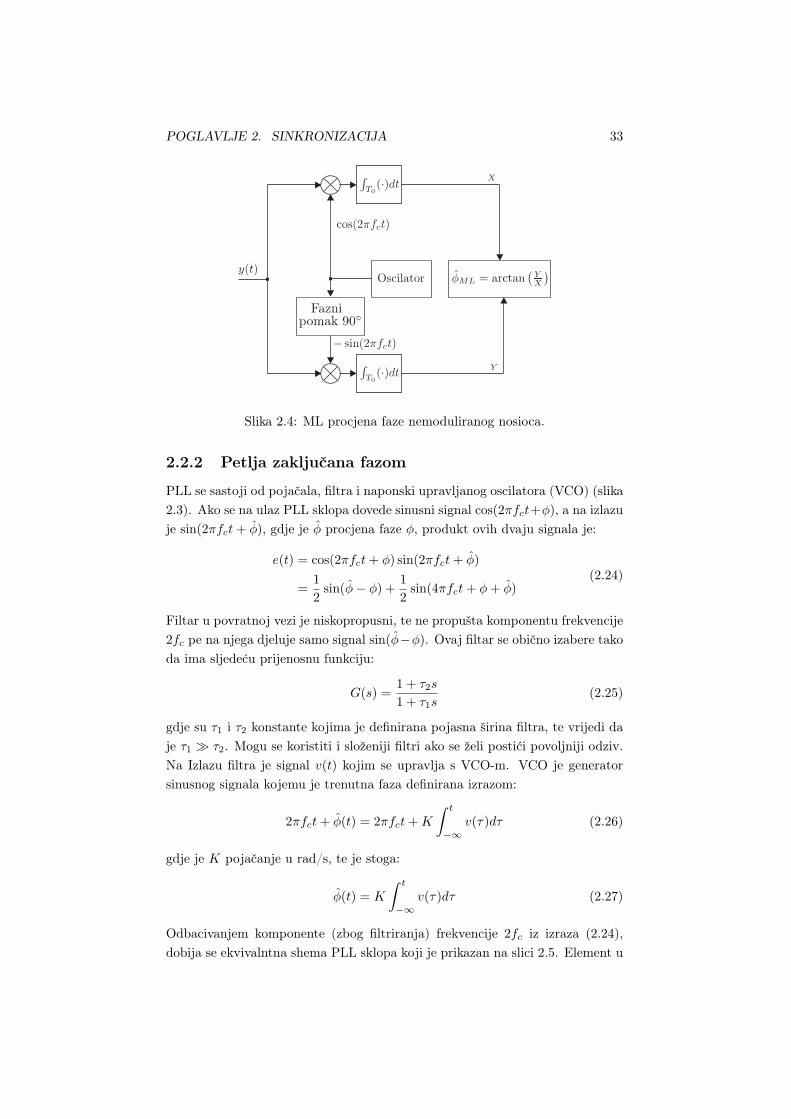
S druge strane, iz relacije (2.23) slijedi realizacija procjene faze pomoću dvakorelatora s kvadraturnim nosiocima. Shema je prikazana na slici 2.4.
POGLAVLJE 2. SINKRONIZACIJA 33
Slika 2.4: ML procjena faze nemoduliranog nosioca.
2.2.2 Petlja zaključana fazom
PLL se sastoji od pojačala, filtra i naponski upravljanog oscilatora (VCO) (slika2.3). Ako se na ulaz PLL sklopa dovede sinusni signal cos(2πfct+ϕ), a na izlazuje sin(2πfct+ ϕ), gdje je ϕ procjena faze ϕ, produkt ovih dvaju signala je:
e(t) = cos(2πfct+ ϕ) sin(2πfct+ ϕ)
=1
2sin(ϕ− ϕ) +
1
2sin(4πfct+ ϕ+ ϕ)
(2.24)
Filtar u povratnoj vezi je niskopropusni, te ne propušta komponentu frekvencije2fc pe na njega djeluje samo signal sin(ϕ−ϕ). Ovaj filtar se obično izabere takoda ima sljedeću prijenosnu funkciju:
G(s) =1 + τ2s
1 + τ1s(2.25)
gdje su τ1 i τ2 konstante kojima je definirana pojasna širina filtra, te vrijedi daje τ1 ≫ τ2. Mogu se koristiti i složeniji filtri ako se želi postići povoljniji odziv.Na Izlazu filtra je signal v(t) kojim se upravlja s VCO-m. VCO je generatorsinusnog signala kojemu je trenutna faza definirana izrazom:
2πfct+ ϕ(t) = 2πfct+K
∫ t
−∞v(τ)dτ (2.26)
gdje je K pojačanje u rad/s, te je stoga:
ϕ(t) = K
∫ t
−∞v(τ)dτ (2.27)
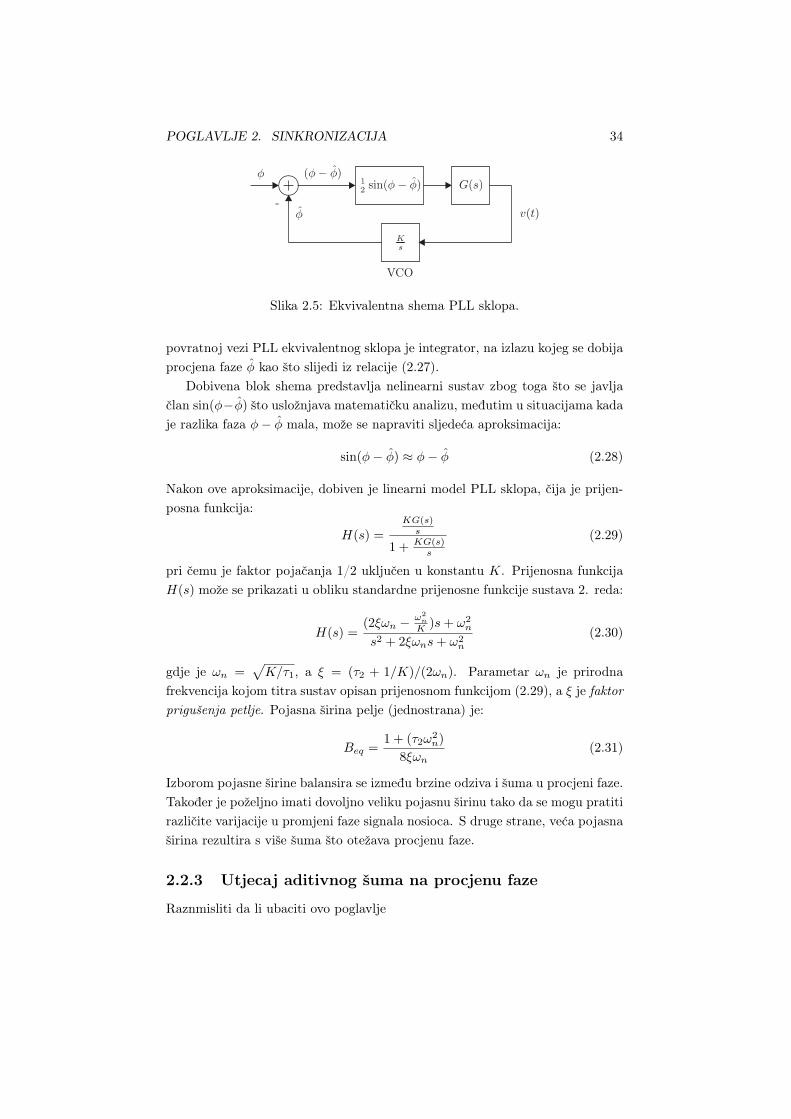
Odbacivanjem komponente (zbog filtriranja) frekvencije 2fc iz izraza (2.24),dobija se ekvivalntna shema PLL sklopa koji je prikazan na slici 2.5. Element u
POGLAVLJE 2. SINKRONIZACIJA 34
Slika 2.5: Ekvivalentna shema PLL sklopa.
povratnoj vezi PLL ekvivalentnog sklopa je integrator, na izlazu kojeg se dobijaprocjena faze ϕ kao što slijedi iz relacije (2.27).
Dobivena blok shema predstavlja nelinearni sustav zbog toga što se javljačlan sin(ϕ−ϕ) što usložnjava matematičku analizu, međutim u situacijama kadaje razlika faza ϕ− ϕ mala, može se napraviti sljedeća aproksimacija:
sin(ϕ− ϕ) ≈ ϕ− ϕ (2.28)
Nakon ove aproksimacije, dobiven je linearni model PLL sklopa, čija je prijen-posna funkcija:
H(s) =KG(s)
s
1 + KG(s)s
(2.29)
pri čemu je faktor pojačanja 1/2 uključen u konstantu K. Prijenosna funkcijaH(s) može se prikazati u obliku standardne prijenosne funkcije sustava 2. reda:
H(s) =(2ξωn − ω2
n
K )s+ ω2n
s2 + 2ξωns+ ω2n
(2.30)
gdje je ωn =√
K/τ1, a ξ = (τ2 + 1/K)/(2ωn). Parametar ωn je prirodnafrekvencija kojom titra sustav opisan prijenosnom funkcijom (2.29), a ξ je faktorprigušenja petlje. Pojasna širina pelje (jednostrana) je:
Beq =1 + (τ2ω
2n)
8ξωn(2.31)
Izborom pojasne širine balansira se između brzine odziva i šuma u procjeni faze.Također je poželjno imati dovoljno veliku pojasnu širinu tako da se mogu pratitirazličite varijacije u promjeni faze signala nosioca. S druge strane, veća pojasnaširina rezultira s više šuma što otežava procjenu faze.
2.2.3 Utjecaj aditivnog šuma na procjenu faze
Raznmisliti da li ubaciti ovo poglavlje

POGLAVLJE 2. SINKRONIZACIJA 35
2.2.4 Decision – Directed Loops
Problem procjene nosioca nastaje kod maksimizacije izraza (2.16) ili (2.17) kadaje signal x(t, ϕ) nositelj informacijske sekvence {Xn}. U decision directed načinuprocjene parametra pretpostavlja se da je sekvenca {Xn} u promatranom inter-valu procjenjena, te je u slučaju izostanka grešaka u detekciji Xn = Xn, gdjeje Xn procjenjena sekvenca. U nastavku će bii razmotrena decision–directedmetoda za klasu linearnih modulacijskih postupaka u kojima se prijamni signalu osnovnom pojasu može izraziti na sljedeći način:
y(t) = e−jϕ∑n
Xng(t− nTs) + n(t)
= xl(t)e−jϕ + n(t)
(2.32)
gdje je g(t − nTs) impulsni odziv filtra za oblikovanje impulsa u predajniku,Ta inteerval signalizacije, a n(t) aditivni šum. Signal xl(t) je poznat u slučajupoznate sekvence {Xn}. Log funkcija maksimalne podudarnosti je:
ΛL(ϕ) = ℜ{(
1
N0
∫T0
y(t)x∗l (t)dt
)ejϕ}
(2.33)
član ℜ{·} se javlja jer su funkcije y(t) i xl(t) kompleksne. Supstitucijom xl(t) uizrazu (2.33) i uz pretpostavku da je interval promatranja cjelobrojni višekratnikintervala signalizacjie tj. T0 = KTs, dobija se:
ΛL(ϕ) = ℜ
{ejϕ
1
N0
K−1∑n=0
X∗n
∫ (n+1)Ts
nTs
y(t)g∗(t− nTs)dt
}
= ℜ
{ejϕ
1
N0
K−1∑n=0
X∗nyn
} (2.34)
gdje je po definiciji:
yn =
∫ (n+1)Ts
nTs
y(r)g∗(t− nTs)dt (2.35)
2.1 Zadaci iz sinkronizacije

Poglavlje 3
Kodiranje
3.1 Linearni blok kodovi
Skup kodnih riječi iste duljine naziva se kôd. Duljina kodne riječi se običnooznačava s n. Elementi kodnih riječi su iz skupa s q elemenata, odnosno alfabeta.Kada alfabet ima dva elementa, 0 i 1, za kod se kaže da je binarni, a elementkodne riječi je bit. Kada je q potencija broja 2, tada se svaki element kodneriječi može zapisati u binarnom obliku.
Binarni kôd, duljine kodne riječi n može imati najviše 2n mogućih kodnihriječi. Od svih mogućih kodnih riječi, može se konstruirati kôd s M = 2k (k < n)
kodnih riječi. Na taj način se blok od k informacijskih bitova mapira u kodneriječi is skupa od M = 2k kodnih riječi. Kôd dobiven na ovaj način se označavakao (n, k) kôd brzine Rc = k/n.
Osim brzine koda, važna je i pojam težina kodne riječi, a to je broj elemenatau kodnoj riječi različitih od 0. Skup svih težina kôda čini distribuciju težina.Postupak kodiranja i dekodiranja uključuje aritmetičke operacije zbrajanja imnoženja nad kôdnim riječima. Ove operacije su specifične, ovisno o simbolimaalfabeta odnosno elementima polja. Npr. simboli binarnog alfabeta su 0 i 1pa polje ima 2 elementa. Općenito, polje z je skup elemenata u kojem sudefinirane dvije aritmetičke operacije, zbrajanje i množenje, koje zadovoljavajusljedeće aksiome.
Zbrajanje
1. Skup z je zatvoren s obzirom na zbrajanje, tj. ako su a, b ∈ z tada jea+ b ∈ z
2. Zbrajanje je asocijativno tj. ako su a, b i c elementi polja z tada vrijedia+ (b+ c) = (a+ b) + c.
3. Zbrajanje je komutativno, tj. a+ b = b+ a.
36

POGLAVLJE 3. KODIRANJE 37
Tablica 3.1: Zbrajanje i množenje u polju GF(2)+ 0 1
0 0 11 1 0
· 0 1
0 0 01 0 1
4. Skup sadrži element koji se naziva nula, koji zadovoljava uvjet a + 0 =
a,∀a ∈ z.
5. Svaki element u skupu ima svoj negativni element. Stoga, ako je b ∈ z,njegov negativni element se označava s −b. Oduzimanje dva elementa,a− b se definira kao a+ (−b).
Množenje
1. Skup z je zatvoren s obzirom na množenje, tj. ako su a, b ∈ z tada jeab ∈ z
2. Množenje je asocijativno, tj. a(bc) = (ab)c.
3. Množenje je komutativno, tj. ab = ba.
4. Množenje je distributivno nad zbrajanjem, tj. (a+ b)c = ac+ bc.
5. Skup z sadrži element koji se naziva jedinični (1) koji zadovoljava uvjeta(1) = a, ∀a ∈ z.
6. Svaki element skupa z, osim nule ima inverzni element. Stoga, ako jeb ∈ z, (b = 0) tada je inverz definiran kao b−1 i vrijedi sljedeće bb−1 = 1.Dijeljenje dva elementa je definirano kao a÷ b = ab−1.
U teoriji kodiranja važna su konačna polja koja se nazivaju Galois poljai označavaju oznakom GF(q). Svako polje mora imati elemente nula i jedan,pa je najjednostavnije polje GF(2). Ako je q prost broj, može se konstruiratipolje GF(q) koji se sastoji od elemenata {0, 1, . . . , q − 1}. Operacije zbrajanjai množenja na elementima polja GF(q) su definirane preko modula q, oznaka(mod q). Npr. operacije zbrajanja i množenja za GF(2) i GF(5) su pokazane utablicama (3.1) i (3.2).
Kada je p prost broj, množenje i zbrajanje se baziraju na modulo-q aritme-tici. Ako je q = pm gdje je p prost broj, a m bilo koji pozitivni cijeli broj onda jemoguće polje GF(p) proširiti na polje GF(pm). Ovo polje se zove prošireno poljepolja GF(p). Zbrajanje i množenje u proširenom polju se temelje na modulo-paritmetici.
Neka su ci i cj proizvoljne kodne riječi (n, k) blok koda. Mjera razlike izmeđunavedenih kodnih riječi je broj pozicija u kojima se razlikuju elementi tih kodnih

POGLAVLJE 3. KODIRANJE 38
Tablica 3.2: Zbrajanje i množenje u polju GF(5)+ 0 1 2 3 4
0 0 1 2 3 41 1 2 3 4 02 2 3 4 0 13 3 4 0 1 24 4 5 1 2 3
· 0 1 2 3 4
0 0 0 0 0 01 0 1 2 3 42 0 2 4 1 33 0 3 1 4 24 0 4 3 2 1
riječi. Ovako definirana mjera se naziva Hammingova distanca između kodnihriječi i označava se s df (ci, cj). Najmanja distanca za kod s M kodnih riječi senaziva minimalna distanca i označava s dmin. Hammingova distanca je mjerarazlike između dvije kodne riječi.
Neka je definiran binarni linearni blok kôd i neka ci, i = 1, 2, . . . ,M ozna-čava M kodnih riječi. Dalje, neka je c1 = [00 . . . 0], i neka wr označava težinur-te kodne riječi, pa slijedi da je wr Hammingova distanca između kodnih riječic1 i cr tj. dH(c1, cr) = wr. Nadalje, distanca dH(ci, cj) između bilo koje dvijekodne riječi ci i cj je jednaka težini kodne riječi koja se dobije kao razlika iz-među ci i cj . Za linearne kodove vrijedi da je razlika između kodnih riječi cii cj kodna riječ čija je težina uključena u skup {wr}. Stoga distribucija težinalinearnog koda u potpunosti opisuje svojstvo distance koda, pa je minimalnadistanca koda:
dmin = min∀r,r =1
{wr} (3.1)
3.1.1 Generator matrica i matrica pariteta
Neka je xm = [xm1 xm2 . . . xmk]T vektor informacijskih bitova, duljine k. Oz-
naka T je oznaka za transponiranje. Vektor xc je ulaz u koder, a na izlazukodera se dobiva kodna riječ cm = [cm1 cm2 . . . cmk]
T duljine n. Kodiranje ulinearnom blok koderu se može predstaviti s n jednadžbi oblika, odnosno j-tim-te kodne riječi cm se može izračunati na sljedeći način:
cmj = xm1g1j + xm2g2j + . . . xmkgkj (3.2)
gdje je gij element matrice g koji se nalazi u i-tom retku i j-tom stupcu, amatrica g je:
G =
g11 g12 · · · g1n
g21 g22 · · · g2n...
.... . .
...gk1 gk2 · · · gkn
(3.3)

POGLAVLJE 3. KODIRANJE 39
odnosno, u matričnom obliku kodna riječ cm se može dobiti matričnim množe-njem:
cm = xTmG (3.4)
gdje je cm = [cm1 cm2 . . . cmk]T . Dakle, cm se može izračunati kao linearna
kombinacija vektora gm = [gm1 gm2 . . . gmk]T koji su elementi matrice G (retci):
cTm = xm1g1 + xm2g2 + · · ·+ xmkgk (3.5)
Važno je napomenuti da retci matrice G moraju biti linearno nezavisni, a toznači da se ni jedan redak ne može dobiti linearnom kombinacijom preostalihredaka. Vektori gm se nazivaju još i baze vektorskog prostora koje razapinju k
dimenzijski prostor koji je zapravo (n, k) kôd. Dakle vektori gm su baze (n, k)
kôda. Također, matrica G nije jedinstvena.Svaka generator matrica G (n, k) kôda se može reducirati u "sistematski
oblik" operacijama nad retcima i permutacijama stupaca. Sistematski oblikgenerator matrice je:
G = [Ik|D] =
1 0 0 · · · 0 | p11 p12 · · · p1(n−k)
0 1 0 · · · 0 | p21 p22 · · · p2(n−k)
......
.... . .
... |...
.... . .
...0 0 0 · · · 1 | pk1 pk2 · · · pk(n−k)
(3.6)
gdje je Tk jedinična matrica dimenzije k, a D je matrica dimenzije k × (n− k)
kojom se definira n−k redundantnih bitova, odnosno bitovi pariteta. Kôd koji jedefiniran ovako definiranom matricom se naziva sistematski kôd, a kôd dobivengenerator matricom koja nema sistematski oblik se naziva nesistematski kôd.
Primjer 3.1. Neka je zadana generator matrica (7, 4) kôda,
G = [I4|D] =
1 0 0 0 1 0 1
0 1 0 0 1 1 1
0 0 1 0 1 1 0
0 0 0 1 0 1 1
(3.7)
kodna riječ koja se dobije množenjem vektora informacijskih bitova xTm s gene-
rator matricom G je:
cTm = [xm1 xm2 xm3 xm4 cm5 cm6 cm7] (3.8)
gdje su:
cm5 = xm1 + xm2 + xm3
cm6 = xm2 + xm3 + xm4
cm7 = xm1 + xm2 + xm4
(3.9)

POGLAVLJE 3. KODIRANJE 40
Slika 3.1: Koder sistematskog (7, 4) koda.
Na prva četiri mjesta u vektoru cTm se nalaze informacijski bitovi, jer je strukturamatrice G takva da prva četiri stupca i retka čine jediničnu matricu pa seinformacijski vektor xm preslikava na prva četiri mjesta. Na preostala tri mjestasu paritetni koji se dobiju relacijama (3.9), a koji slijede iz generator matrice,iz zadnja tri stupca.
Linearni sistematski (n, k) koder binarnog sistematskog (n, k) kôda, prikazanna slici (3.1), se može realizirati pomoću posmičnih registara (eng. shift register)i zbrajala po modulu 2. Informacijski bitovi se pohrane u registre (4 registrau vrhu slike), izračunaju se paritetni bitovi te se na izlaz proslijede prvo četiriinformacijska bita a zatim i paritetni bitovi te se dobije kodna riječ.
Svaki (n, k) linearni blok kôd ima dualni kôd dimenzije n − k. Dualni kôdje također linearni (n, n− k) kod, odnosno sastoji se od 2n−k nezavisnih kodnihriječi. Generator matrica dualnog koda se uobičajeno označava s H. Bilo kojakodna riječ cm iz koda (n, k) je ortogonalna bilo kojoj kodnoj riječi iz dualnogkoda. Također se može zaključiti da je proizvoljna kodna riječ iz (n, k) kodaortogonalna sa svim retcima matrice H tj.:
cmHT = 0 (3.10)
gdje je 0 nul vektor dimenzije n− k, odnosno vektor sa svim elementima jedna-kim 0. Pošto (3.10) vrijedi za bilo koju kodnu riječ koda (n, k), vrijedi takođeri sljedeće:
GHT = 0 (3.11)
gdje je 0 matrica dimenzije k × (n − k) sa svim elementima jednakim 0. Zasistematski kod vrijedi da je:
H = [−DT |In−k] (3.12)
Predznak - u izrazu (3.12) se može u slučaju binarnog koda zanemariti jer je ubinarnom kodu −1 = 1 i −0 = 0, što je lako provjeriti.

POGLAVLJE 3. KODIRANJE 41
Primjer 3.2. Sistematski (7, 4) kôd generiran matricom G zadanoj u (3.7),matrica pariteta H je:
H =
1 1 1 0 1 0 0
0 1 1 1 0 1 0
1 1 0 1 0 0 1
(3.13)
Množenjem vektora cm iz prostora kodnih riječi s matricom pariteta, cmHT
i uz pomoć relacije (3.9) dobija se:
xm1 + xm2 + xm3 + cm5 = 0
xm2 + xm3 + xm4 + cm6 = 0
xm1 + xm2 + xm4 + cm7 = 0
(3.14)
Budući je rezultat množenja kodne riječi cm s matricom pariteta HT nul vektor,može se zaključiti da se na ovaj način može testirati da li je u prijenosu podataka,odnosno kodne riječi cm komunikacijskim kanalom, došlo do greške u prijenosu.Prijemna kodna riječ je y, pa je potrebno računati yHT . Na ovaj način se pro-vjerava paritetni bit s pripadajućom linearnom kombinacijom primljenih bitovay1, y2, y3 i y4, a s kojima ze određuje paritetni bit u predajniku.
Iz linearnog binarnog (n, k) blok kôda minimalne distance dmin može sekonstruirati linearni binarni (n+ 1, k) kod dodavanjem jednog bita za provjerupariteta svakoj kodnoj riječi. Paritetni bit se uobičajeno računa tako da se od-nosi na ciejlu kodnu riječ. Dakle, dodani bit je 0 ako originalna kodna riječ imaparan broj jedinica, a 1 ako ima neparan broj jedinica. Nadalje, ako je mini-malna težina, a samim time i minimalna distanca koda neparan broj dodani bitpariteta povećava minimalnu distancu za 1. Novonastali kôd se naziva proširenikod. Njegova matrica pariteta je:
He =
| 0
| 0
H |...
| 0
1 1 1 · · · 1 | 1
(3.15)
gdje je H originalna matrica pariteta.Sistematski (n, k) kôd se također može skratiti postavljanjem određenog
broja informacijskih bitova na 0. Tako, linearni (n, k) kôd s k informacijskihbitova postaje (n − l, n − l) linearni kod postavljanjem prvih l bitova na nulu.Ovi bitovi se ne prenose. n− k bitova za provjeru pariteta se računa na sličannačin kao i kod originalnog kôda. Budići je:
cm = xmG (3.16)

POGLAVLJE 3. KODIRANJE 42
postavljanjem prvih l bitova informacijeskog vektora xm na 0 je ekvivalent re-duciranju broja redaka matrice G, odnosno odstranjivanju prvih l redaka. Naisti način, budući je:
cmHT = 0 (3.17)
može se odstraniti prvih l stupaca matrice pariteta H. Skraćeni (n − l, k − l)
kod ima 2k−l kodnih riječi. Minimalna distanca novog skupa kodnih riječi jebarem jednaka minimalnoj distanci originalnog (n, k) koda.
Hammingovi blok kodovi
Općenito, Hammingovi kodovi mogu biti binarni i nebinarni. Najčešće se koristebinarni kodovi, pa će biti samo oni opisani. Radi se o klasi kodova sljedećegsvojstva,
(n, k) = (2m − 1, 2m − 1−m) (3.18)
gdje je m bilo koji pozitivni cijeli broj. Npr., ako je m = 3 onda je kôd (7, 4).Matrica pariteta H Hammingovog koda ima svojstvo koje omogućava jed-
nostavno opisivanje kôda. Matrica pariteta (n, k) Hammingovog koda ima n−k
redaka i n stupaca. Za binarni Hammingov (n, k) kôd u stupcima matrice pari-teta se nalaze svi vektori s m = n−k elemenata osim nul–vektora. U primjeru 3.2stupci matrica pariteta su sljedeći vektori (001), (010), (011), (100), (101), (110), (111).Vodeći računa o svojstvu matrice pariteta H u Hammingovom kodu (3.12), lakoje konstruirati matricu pariteta H za sistematski kôd i iz matrice pariteta odre-diti generator matricu G.
Dodavanjem jednog bita pariteta, Hammingov kôd se može proširiti na (n+
1, k) kôd, i skratiti na (n− l, k − l) kôd.Distribucija težine za klasu Hammingovih (n, k) kodova je poznata, i može
se zapisati u obliku:
A(z) =n∑
l=0
=1
n+ 1
[(1 + z)nn(1 + z)
n−12 (1− z)
n+12
](3.19)
3.1.2 Ciklički kôdovi
Ciklički kôdovi spadaju u linearnie kôdove, koji zadovoljavaju svojstvo cikličkogpomicanja: ako je c = [xn−1 xn−2 · · ·x1 x0] kodna riječ cikličkog kôda, onda je ikodna riječ c = [xn−2 xn−3 · · ·x0 xn−1], dobivena cikličkim pomicanjem takođerkodna riječ. Zapravo, svi mogući ciklički pomaci kodne riječi c su kôdne riječi.Ovo svojstvo je korisno budući je lako generirati kôdne riječi koristeći cikličkopomicanje, pa se jednostavno mogu implementirati dekoderi dugih kôdova.
U analiziranju cikličkih kodova uvodi se zapis kôdne riječi pomoću polinoma.Koldna riječ c = [xn−1 xn−2 · · ·x1 x0] se u polinomijalnom zapisu može pred-staviti kao:
c(p) = cn−1pn−1 + cn−2p
n−2 + · · ·+ c1p+ c0 (3.20)

POGLAVLJE 3. KODIRANJE 43
U binarnom kôdu, svaki koeficijent polinoma je 0 ili 1. Ako se polinom p(p)
pomnoži s p dobije se:
pc(p) = cn−1pn + cn−2p
n−1 + · · ·+ c1p2 + c0p (3.21)
Ovaj polinom ne reprezentira kôdnu riječ, jer mu je stupanj jednak n ako jecn−1 = 1. Ako se podijeli pc(p) s pn + 1, dobije se:
pc(p)
pn + 1= cn−1 +
c1(p)
pn + 1(3.22)
gdje jec1(p) = cn−2p
n−1 + cn−3pn−2 + · · ·+ c0p+ cn−1 (3.23)
a polinom c1(p) predstavlja kodnu riječ c1 = [cn−2 · · · c0 cn−1] a to je zapravociklički pomaknuta kodna riječ c za jedno mjesto. Budući je c1(p) ostatakdobiven dijeljenjem p c(p) s pn + 1, može se kazati da je:
c1(p) = pc(p) mod(pn + 1) (3.24)
Na sličan način, ako je c(p) kodna riječ cikličkog kôda, tada je plc(p)mod(pn+1) također kodna riječ cikličkog kôda, pa se može pisati:
plc(p) = Q(p)(pn + 1) + cl(p) (3.25)
gdje cl(p) predstavlja kodnu riječ cikličkog kôda, a Q(p) je kvocijent.Ciklički kôd se može generirati pomoću generator polinoma g(p) stupnja
n− k. Generator polinom (n, k) cikličkog kôda je faktor od pn +1 i općenito jeoblika:
pn−k + gn−k−1pn−k−1 + · · ·+ g1p+ 1 (3.26)
Također, se na isti način definira polinom poruke x(p):
x(p) = xk−1pk−1 + xk−2p
k−2 + ·+ x1p+ x0 (3.27)
gdje [xk−1 xk−2 · x1 x0] predstavlja k informacijskih bitova. Množenjem poli-noma c(p)g(o) dobije se polinom stupnja ne većeg od n−1 koji predstavlja kodnuriječ kôda. Skup različitih polinoma poruke X = {xi(p)} ima 2k elemenata, pase može generirati 2k kodnih riječi.
*Lako je pokazati da su sve je kodne riječi koje se dobiju množenjem gene-rator polinima s polinomom poruke. Neka su kodne riječi koda:
cm(p) = xm(p)g(p), m = 1, 2, · · · , 2k (3.28)
za pokazati da je bilo koja kodna riječ iz izraza (3.28) element kôda, dovoljno jepokazati da ispunjava svojstvo cikličnosti. Dakle, ciklički pomak bilo koje riječic(p) dobivene pomoću (3.28) je:
c1(p) = pc(p) + cn−1(pn + 1) (3.29)
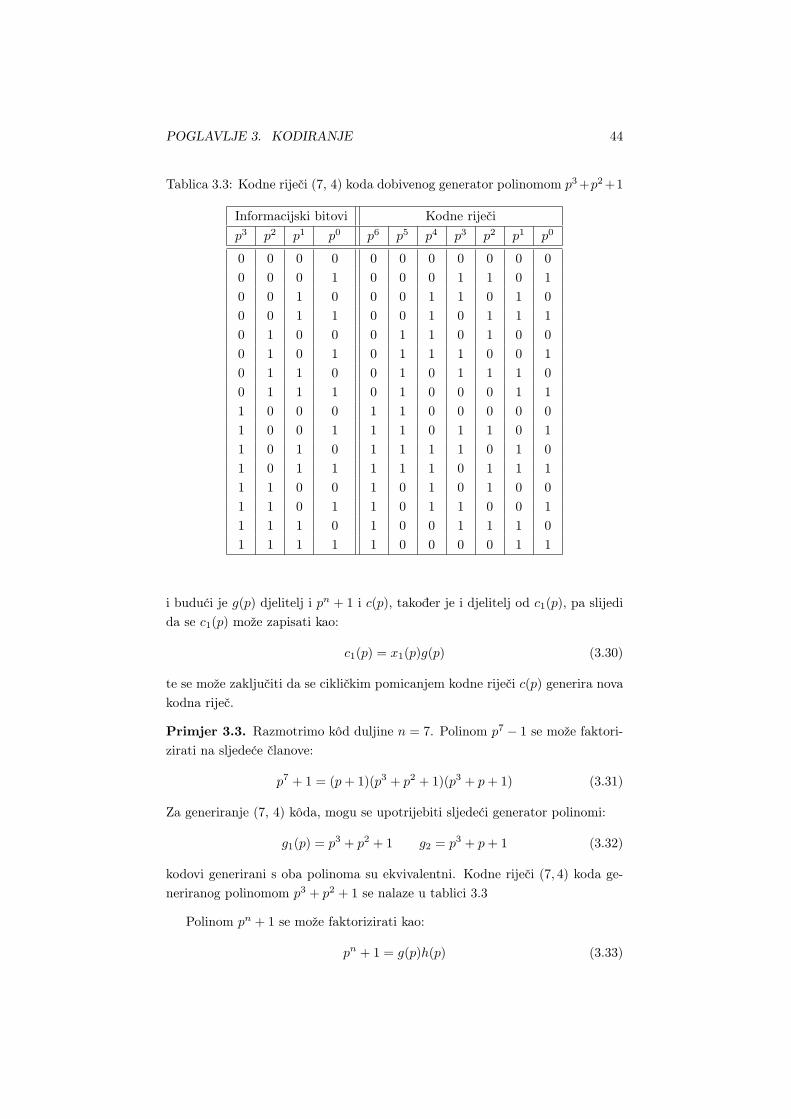
POGLAVLJE 3. KODIRANJE 44
Tablica 3.3: Kodne riječi (7, 4) koda dobivenog generator polinomom p3+p2+1
Informacijski bitovi Kodne riječip3 p2 p1 p0 p6 p5 p4 p3 p2 p1 p0
0 0 0 0 0 0 0 0 0 0 00 0 0 1 0 0 0 1 1 0 10 0 1 0 0 0 1 1 0 1 00 0 1 1 0 0 1 0 1 1 10 1 0 0 0 1 1 0 1 0 00 1 0 1 0 1 1 1 0 0 10 1 1 0 0 1 0 1 1 1 00 1 1 1 0 1 0 0 0 1 11 0 0 0 1 1 0 0 0 0 01 0 0 1 1 1 0 1 1 0 11 0 1 0 1 1 1 1 0 1 01 0 1 1 1 1 1 0 1 1 11 1 0 0 1 0 1 0 1 0 01 1 0 1 1 0 1 1 0 0 11 1 1 0 1 0 0 1 1 1 01 1 1 1 1 0 0 0 0 1 1
i budući je g(p) djelitelj i pn + 1 i c(p), također je i djelitelj od c1(p), pa slijedida se c1(p) može zapisati kao:
c1(p) = x1(p)g(p) (3.30)
te se može zaključiti da se cikličkim pomicanjem kodne riječi c(p) generira novakodna riječ.
Primjer 3.3. Razmotrimo kôd duljine n = 7. Polinom p7 − 1 se može faktori-zirati na sljedeće članove:
p7 + 1 = (p+ 1)(p3 + p2 + 1)(p3 + p+ 1) (3.31)
Za generiranje (7, 4) kôda, mogu se upotrijebiti sljedeći generator polinomi:
g1(p) = p3 + p2 + 1 g2 = p3 + p+ 1 (3.32)
kodovi generirani s oba polinoma su ekvivalentni. Kodne riječi (7, 4) koda ge-neriranog polinomom p3 + p2 + 1 se nalaze u tablici 3.3
Polinom pn + 1 se može faktorizirati kao:
pn + 1 = g(p)h(p) (3.33)

POGLAVLJE 3. KODIRANJE 45
Tablica 3.4: Kodne riječi (7, 3) koda dobivenog generator polinomom p4 + p3 +
p2 + 1
Inform. bitovi Kodne riječip2 p1 p0 p6 p5 p4 p3 p2 p1 p0
0 0 0 0 0 0 0 0 0 00 0 1 0 0 1 0 1 1 10 1 0 0 1 0 1 1 1 00 1 1 0 1 1 1 0 0 11 0 0 1 0 1 1 1 0 01 0 1 1 0 0 1 0 1 11 1 0 1 1 1 0 0 1 01 1 1 1 1 0 0 1 0 1
gdje je g(p) generator polinom cikličkog (n, k) kôda, a h(p) je polinom paritetastupnja k. Polinom h(p) se može upotrijebiti za generiranje dualnog koda. Zato je potrebno definirati recipročni polinom polinoma h(p) kao:
pkh(p−1) = pk(p−k + hk−1p
−k+1 + hk−2p−k+2 + · · ·+ h1p
−1 + 1)
= 1 + hk−1p+ hk−2p2 + · · ·+ h1p
k−1 + pk(3.34)
Recipročni polinom je također faktor od pn+1 pa je ujedno i generator polinom(n, n− k) cikličkog koda.
Primjer 3.4. Polinom pariteta dualnog (7, 3) kôda (7, 4) cikličkog koda iz pri-mjera 3.4 je:
h1(p) = (p+ 1)(p3 + p2 + 1)
= p4 + p3 + p2 + 1(3.35)
a recipročni polinom:
p4h1(p−1) = 1 + p+ p2 + p4 (3.36)
Ovaj polinom generira (7, 3) dualni kôd pokazan u tablici 3.3Jednostavno je provjeriti da su kodne riječi ovog koda ortogonalne kodnim
riječima koda (7, 4) iz primjera 3.3.
Korisno je pokazati kako se dobije generator matrica iz generator polinomacikličkog (n, k) koda. Generator matrica (n, k) koda može se konstruirati izskupa od k linearno nezavisnih kodnih riječi. Iz zadanog generator polinomag(p) jednostavno je generirati k linearno nezavisnih kodnih riječi koje odgovarajuskupu k linearno nezavisnih polinoma.
pk−1g(p), pk−2g(p), · · · , pg(p), g(p) (3.37)

POGLAVLJE 3. KODIRANJE 46
Ovaj skup polinoma čini bazu dimenzije k, pa su pripadajuće kodne riječi bazadimenzije k cikličkog koda.
Generator matrica cikličkog koda s generator polinomom g(p) = p3 + p2 + 1
se dobije iz sljedećih polinoma:
Primjer 3.5. Generator matrica cikličkog koda s generator polinomom g(p) =
p3 + p2 + 1 se dobije iz sljedećih polinoma:
plg(p)p3+l + p2+l + pl, l = 3, 2, 1, 0 (3.38)
pa je generator matrica:
G1 =
1 1 0 1 0 0 0
0 1 1 0 1 0 0
0 0 1 1 0 1 0
0 0 0 1 1 0 1
(3.39)
Matrica pariteta H se izračuna na isti način pomoću odgovarajućeg recipročnogpolinoma.
Može se konstruirati i generator matrica cikličkog koda u sistematskomobliku tj. G = [Ik|D]. U sistematskoj matrici G, l-ti rdak se može u poli-nomskom obliku zapisati kao: pn−l + rl(p), l = 1, 2, · · · , k gdje je rl(p) polinomčiji je stupanj manji od (n−k). Ovaj oblik se dobije ako se podijeli pn−1 s g(p):
pn−1
g(p)= ql(p) +
rl(p)
g(p), l = 1, 2, · · · , k (3.40)
što je ekvivalentno:
pn−l = ql(p)g(p) + rl(p), l = 1, 2, · · · , k (3.41)
gdje je q(p) kvocijent, a pn−1 + rl(p) je kodna riječ cikličkog koda budući jepn−1 + rl(p) = ql(p)g(p). Stoga je pripadajući polinom l-tog retka sistematskematrice G jednak pn−l + rl(p)
Primjer 3.6. Za (7, 4) ciklički kôd s generator polinomom g(p) = p3 + p + 1
dobije se sljedeće:
p6 = (p3 + p+ 1)g(p) + p2 + 0
p5 = (p2 + 1)g(p) + p2 + p+ 1
p4 = pg(p) + p2 + p
p3 = g(p) + p+ 1
(3.42)
pa je generator matrica koda u sistematskom obliku:
G =
1 0 0 0 1 0 1
0 1 0 0 1 1 1
0 0 1 0 1 1 0
0 0 0 1 0 1 1
(3.43)

POGLAVLJE 3. KODIRANJE 47
Generator matrica G u sistematskom obliku se može dobiti i direktno izgenerator polinoma g(p). Ako se polinom poruke pomnoži s pn−k, dobija se:
pn−kx(p) = xk−1pn−1 + xk−2p
n−2 + · · ·+ x1pn−k+1 + x0p
n−k (3.44)
U sistematskom kodu, gornji polinom predstavlja prvih k bitova u kodnoj riječic(p). Ovom polinomu je potrebno dodati polinom stupnja manjeg od n− k kojipredstavlja paritetne bitove. Ako se pn−kx(p) podijeli s g(p), dobije se:
pn−kx(p)
g(p)= q(p) +
r(p)
g(p)(3.45)
odnosno, ekvivalentno:
pn−kx(p) = q(p)g(p) + r(p) (3.46)
gdje je r(p) stupnja manjeg od n − k. Jasno, q(p)g(p) je kodna riječ cikličkogkoda, pa se dodavanjem člana r(p) na lijevu i desnu stranu izraza (3.46)
Dakle, sistematski kôd se može generirati na sljedeće načine:
1. množenjem polinoma poruke x(p) s pn−k
2. dijeljenjem pn−kx(p) s g(p) da bi se dobio ostatak r(p), i dodavanjem r(p)
izrazu pn−kx(p)
Koderi za cikličke kodove
Kodiranje cikličkih kodova se može obavljati pomoću linearnih posmičnih re-gistara s povratnom vezom, bilo da se kodiranje temelji na kodiranju pomoćugenerator polinoma ili pomoću polinoma pariteta.
Za generiranje sistematskog cikličkog koda potrebna su tri koraka
• Množenje polinoma poruke x(p) s pn−k
• dijeljenje umnoška iz prvog koraka s g(p)
• dodavanje ostatka dijeljenja iz drugog koraka umnošku x(p)pn−k
Dijeljenje polinoma A(p) = pn−kx(p) stupnja n− 1 s polinomom
g(p) = gn−kpn−k + gn−k−1p
n−k−1 + · · ·+ g1p+ g0 (3.47)
može se realizirati pomoću posmičnog registra s n−k elemenata, prikazanog naslici 3.2. U početku rada, vrijednost u svim memorijskim elementima je 0. Zatimse u registar dovode vrijednosti polinoma A(p) = (an−1p
n−1, an−2pn−2, · · · , an−kp
n−k),ali počevši od najvećeg stupnja, dakle vrijednost an−1 pa prema najmanjemstupnju odnosno vrijednost an−k. Nakon k pomaka, vrijednost u posljednjemmemorijskom elementu (na desnoj strani) je an−1, te će na izlazu sklopa bitivrijednost an−1gn−k što je rezultat nakon prvog dijeljenja polinoma A(p) s g(p).U sljedećem koraku pomnoži se rezultat dijeljenja an−1gn−k s generator polino-mom g(p) i oduzme od A(p), a to se realizira pomoću povratne veze u posmičnomregistru.
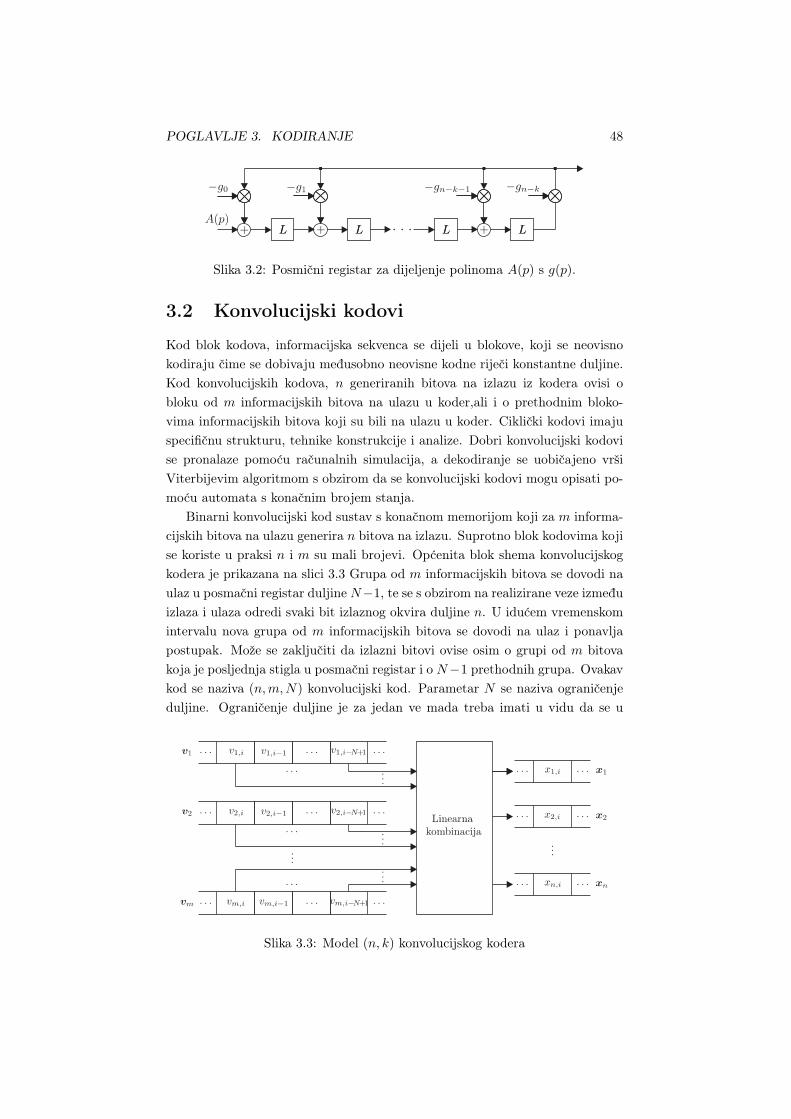
POGLAVLJE 3. KODIRANJE 48
Slika 3.2: Posmični registar za dijeljenje polinoma A(p) s g(p).
3.2 Konvolucijski kodovi
Kod blok kodova, informacijska sekvenca se dijeli u blokove, koji se neovisnokodiraju čime se dobivaju međusobno neovisne kodne riječi konstantne duljine.Kod konvolucijskih kodova, n generiranih bitova na izlazu iz kodera ovisi obloku od m informacijskih bitova na ulazu u koder,ali i o prethodnim bloko-vima informacijskih bitova koji su bili na ulazu u koder. Ciklički kodovi imajuspecifičnu strukturu, tehnike konstrukcije i analize. Dobri konvolucijski kodovise pronalaze pomoću računalnih simulacija, a dekodiranje se uobičajeno vršiViterbijevim algoritmom s obzirom da se konvolucijski kodovi mogu opisati po-moću automata s konačnim brojem stanja.
Binarni konvolucijski kod sustav s konačnom memorijom koji za m informa-cijskih bitova na ulazu generira n bitova na izlazu. Suprotno blok kodovima kojise koriste u praksi n i m su mali brojevi. Općenita blok shema konvolucijskogkodera je prikazana na slici 3.3 Grupa od m informacijskih bitova se dovodi naulaz u posmačni registar duljine N−1, te se s obzirom na realizirane veze izmeđuizlaza i ulaza odredi svaki bit izlaznog okvira duljine n. U idućem vremenskomintervalu nova grupa od m informacijskih bitova se dovodi na ulaz i ponavljapostupak. Može se zaključiti da izlazni bitovi ovise osim o grupi od m bitovakoja je posljednja stigla u posmačni registar i o N−1 prethodnih grupa. Ovakavkod se naziva (n,m,N) konvolucijski kod. Parametar N se naziva ograničenjeduljine. Ograničenje duljine je za jedan ve mada treba imati u vidu da se u
Slika 3.3: Model (n, k) konvolucijskog kodera
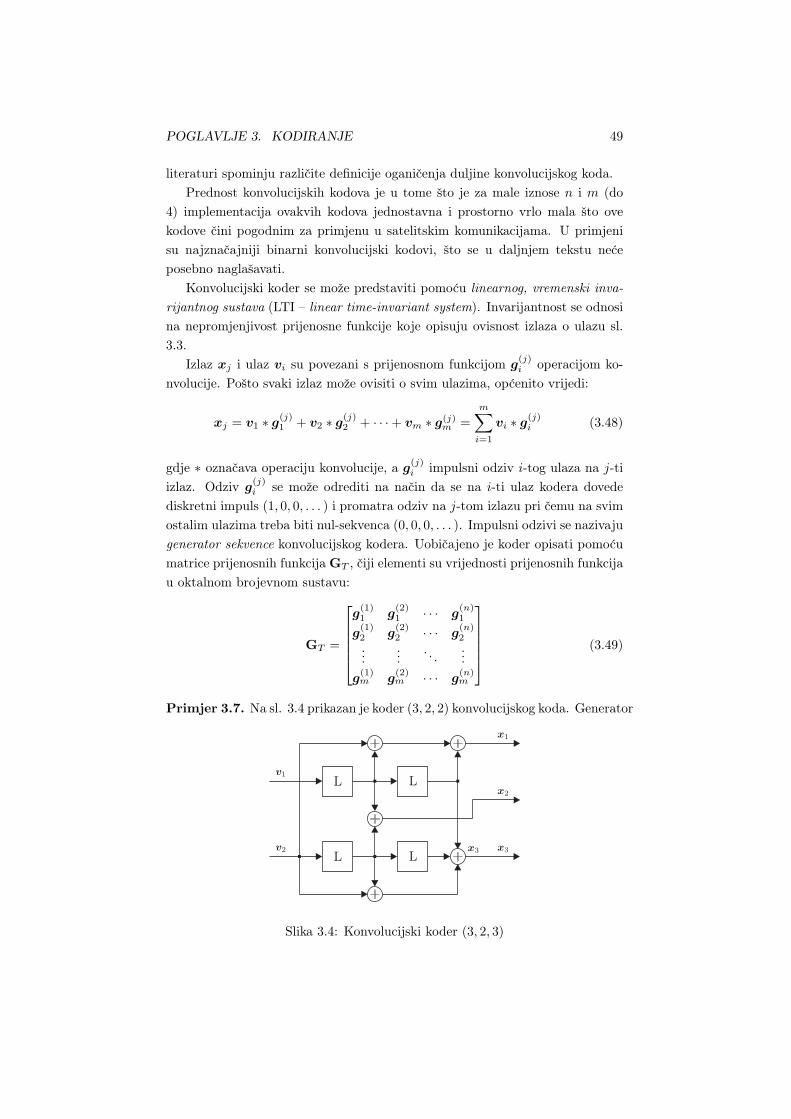
POGLAVLJE 3. KODIRANJE 49
literaturi spominju različite definicije oganičenja duljine konvolucijskog koda.Prednost konvolucijskih kodova je u tome što je za male iznose n i m (do
4) implementacija ovakvih kodova jednostavna i prostorno vrlo mala što ovekodove čini pogodnim za primjenu u satelitskim komunikacijama. U primjenisu najznačajniji binarni konvolucijski kodovi, što se u daljnjem tekstu nećeposebno naglašavati.
Konvolucijski koder se može predstaviti pomoću linearnog, vremenski inva-rijantnog sustava (LTI – linear time-invariant system). Invarijantnost se odnosina nepromjenjivost prijenosne funkcije koje opisuju ovisnost izlaza o ulazu sl.3.3.
Izlaz xj i ulaz vi su povezani s prijenosnom funkcijom g(j)i operacijom ko-
nvolucije. Pošto svaki izlaz može ovisiti o svim ulazima, općenito vrijedi:
xj = v1 ∗ g(j)1 + v2 ∗ g(j)
2 + · · ·+ vm ∗ g(j)m =
m∑i=1
vi ∗ g(j)i (3.48)
gdje ∗ označava operaciju konvolucije, a g(j)i impulsni odziv i-tog ulaza na j-ti
izlaz. Odziv g(j)i se može odrediti na način da se na i-ti ulaz kodera dovede
diskretni impuls (1, 0, 0, . . . ) i promatra odziv na j-tom izlazu pri čemu na svimostalim ulazima treba biti nul-sekvenca (0, 0, 0, . . . ). Impulsni odzivi se nazivajugenerator sekvence konvolucijskog kodera. Uobičajeno je koder opisati pomoćumatrice prijenosnih funkcija GT , čiji elementi su vrijednosti prijenosnih funkcijau oktalnom brojevnom sustavu:
GT =
g(1)1 g
(2)1 · · · g
(n)1
g(1)2 g
(2)2 · · · g
(n)2
......
. . ....
g(1)m g
(2)m · · · g
(n)m
(3.49)
Primjer 3.7. Na sl. 3.4 prikazan je koder (3, 2, 2) konvolucijskog koda. Generator
Slika 3.4: Konvolucijski koder (3, 2, 3)

POGLAVLJE 3. KODIRANJE 50
sekvence su sljedeći:
g(1)1 = (0, 1, 1) g
(2)1 = (0, 1, 0) g
(3)1 = (0, 0, 1)
g(1)2 = (1, 0, 0) g
(2)2 = (0, 1, 0) g
(3)2 = (1, 1, 1)
(3.50)
Odnosno u oktalnom zapisu:
GT =
[3 2 1
4 2 7
]. (3.51)
Izlazni tok podataka iz konvolucijskog kodera se formira na način da se useriji uzimaju podaci s izlaza, odnosno općenito vrijedi:
x = (x1,0, x2,0, . . . , xn,0, x1,1, x2,1, . . . , xn,1, . . . , x1,L−1, x2,L−1, . . . , xn,L−1),
(3.52)gdje prvi indeks označava izlaz, a drugi diskretni vremenski interval. Tako npr.x2,5 označava vrijednost na drugom izlazu (x2) u 5-om vremenskom intervalu.S L je označena duljina sekvence. Ekvivalentno, može se definirati i ulazni tokpodataka:
v = (v1,0, v2,0, . . . , vm,0, v1,1, v2,1, . . . , vm,1, . . . , v1,L−1, v2,L−1, . . . , vm,L−1).
(3.53)Izlazni tok podataka može se zapisati u obliku matričnog množenja:
x = vG. (3.54)
Da bi se definirala matrica G potrebno je definirati N podmatrica Gk od kojihse svaka odnosi na k-te memorijske elemente, a koje sadrže elemente prijenos-nih funkcija g
(j)i , a imaju m redaka i n stupaca. Elementi retka su koeficijenti
generator sekvenci g(j)i koji se odnose na i-ti ulaz, a stupci su elementi gene-
rator sekvenci g(j)i koji se odnose na j-ti izlaz. Matricom Gk se računaju sve
izlazne vrijednosti konvolucijskog kodera pomoću svih ulaznih vrijednosti kojesu potrebne da bi se izračunale izlazne vrijednosti.
Gk =
g(1)1,k g
(2)1,k · · · g
(n)1,k
g(1)2,k g
(2)2,k · · · g
(n)2,k
......
. . ....
g(1)m,k g
(2)m,k · · · g
(n)m,k
(3.55)
Koristeći podmatrice, definira se matrica kojom je definirana ovisnost izlaznihvrijednosti konvolucijskog kodera o ulaznim vrijednostima:
G =
G1 G2 · · · GN 0 0 0 · · ·0 G1 G2 · · · GN 0 0 · · ·0 0 G1 G2 · · · GN 0 · · ·0 0 0 G1 G2 · · · GN · · ·
......
. . .
(3.56)
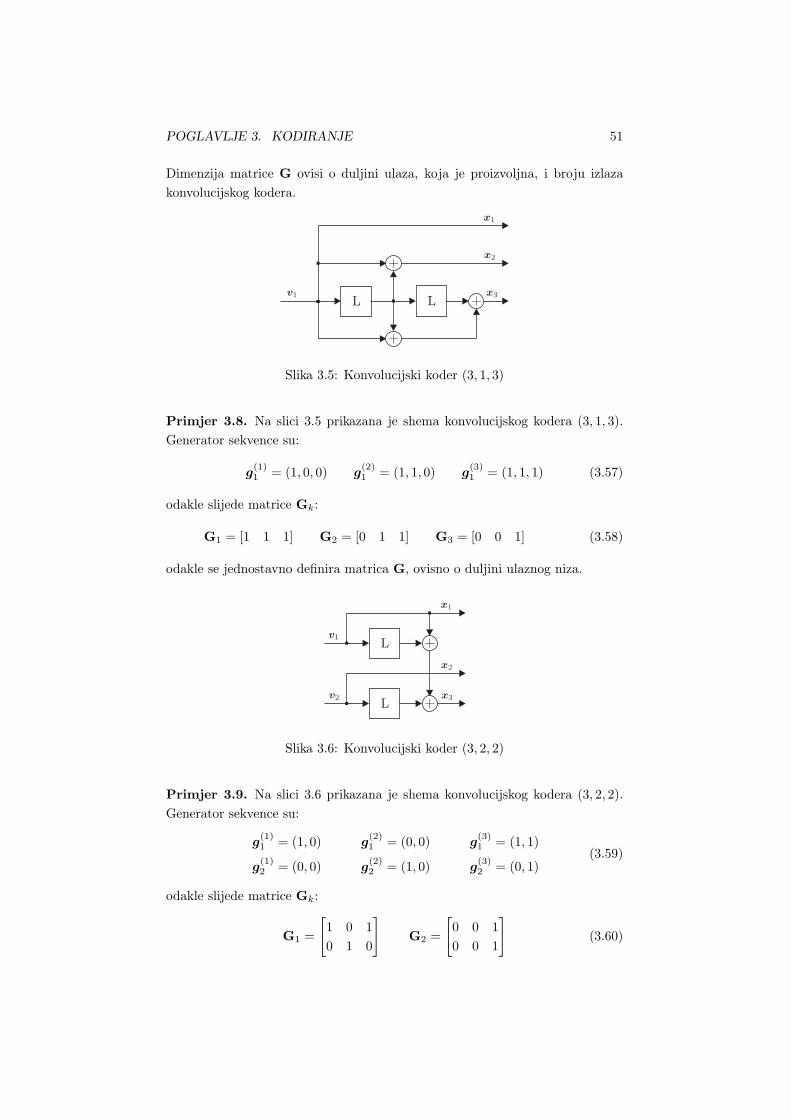
POGLAVLJE 3. KODIRANJE 51
Dimenzija matrice G ovisi o duljini ulaza, koja je proizvoljna, i broju izlazakonvolucijskog kodera.
Slika 3.5: Konvolucijski koder (3, 1, 3)
Primjer 3.8. Na slici 3.5 prikazana je shema konvolucijskog kodera (3, 1, 3).Generator sekvence su:
g(1)1 = (1, 0, 0) g
(2)1 = (1, 1, 0) g
(3)1 = (1, 1, 1) (3.57)
odakle slijede matrice Gk:
G1 = [1 1 1] G2 = [0 1 1] G3 = [0 0 1] (3.58)
odakle se jednostavno definira matrica G, ovisno o duljini ulaznog niza.
Slika 3.6: Konvolucijski koder (3, 2, 2)
Primjer 3.9. Na slici 3.6 prikazana je shema konvolucijskog kodera (3, 2, 2).Generator sekvence su:
g(1)1 = (1, 0) g
(2)1 = (0, 0) g
(3)1 = (1, 1)
g(1)2 = (0, 0) g
(2)2 = (1, 0) g
(3)2 = (0, 1)
(3.59)
odakle slijede matrice Gk:
G1 =
[1 0 1
0 1 0
]G2 =
[0 0 1
0 0 1
](3.60)

POGLAVLJE 3. KODIRANJE 52
Izlaz iz konvolucijskog kodera može se definirati i preko operatora kašnjenjaD. Ulazni tok podataka, kodne riječi i elementi generator sekvenci zapisanipreko D transformacije su:
vi = (vi,0, vi,1, vi,2 . . .) ⇔ Vi(D) = vi,0 + vi,1D + vi,2D2 + . . .
xi = (xi,0, xi,1, xi,2 . . .) ⇔ Xi(D) = xi,0 + xi,1D + xi,2D2 + . . .
g(i)j =
(g(i)j,0, g
(i)j,1, g
(i)j,2 . . .
)⇔ G
(i)j (D) = g
(i)j,0 + g
(i)j,1D + g
(i)j,2D
2 + . . .
(3.61)
Koristeći D transformaciju, kodna riječ na i-tom izlazu ukoliko sustav ima samojedan ulaz će biti:
Xi(D) = V(D)G(i)(D) (3.62)
Ako koder ima više ulaza, ekvivalentno izlaz je superpozicija ulaza, uzimajući uobzir odgovarajuće prijenosne funkvcije koje povezuju i-ti izlaz i j-ti ulaz:
Xi(D) =m∑j=1
Vj(D)G(i)j (3.63)
Izraz (3.63) može se zapisati u matričnom obliku:
Xi(D) =[V1(D) V2(D) . . . Vm(D)
]G
(i)1 (D)
G(i)2 (D)
...G
(i)m (D)
(3.64)
S obzirom da konvolucijski koder ima više izlaza, može se definirati vektor X(D)
čiji elementi su pojedini izlazi:
X(D) =[X1(D) X2(D) . . . Xm(D)
](3.65)
te konačno vrijedi:X(D) = V(D)G(D) (3.66)
gdje su:V(D) =
[V1(D) V2(D) . . . Vm(D)
](3.67)
odnosno
G(D) =
G
(1)1 (D) G
(2)1 (D) . . . G
(n)1 (D)
G(1)2 (D) G
(2)2 (D) . . . G
(n)2 (D)
......
. . ....
G(1)m (D) G
(2)m (D) . . . G
(n)m (D)
. (3.68)
Matrica G(D) se naziva matrica prijenosnih funkcija.
Primjer 3.10. Na slici 3.7 prikazana je shema konvolucijskog kodera (2, 1, 4).Matrica prijenosnih funkcija G(D) je:
G(D) =[1 +D +D3 1 +D +D2 +D3
]. (3.69)
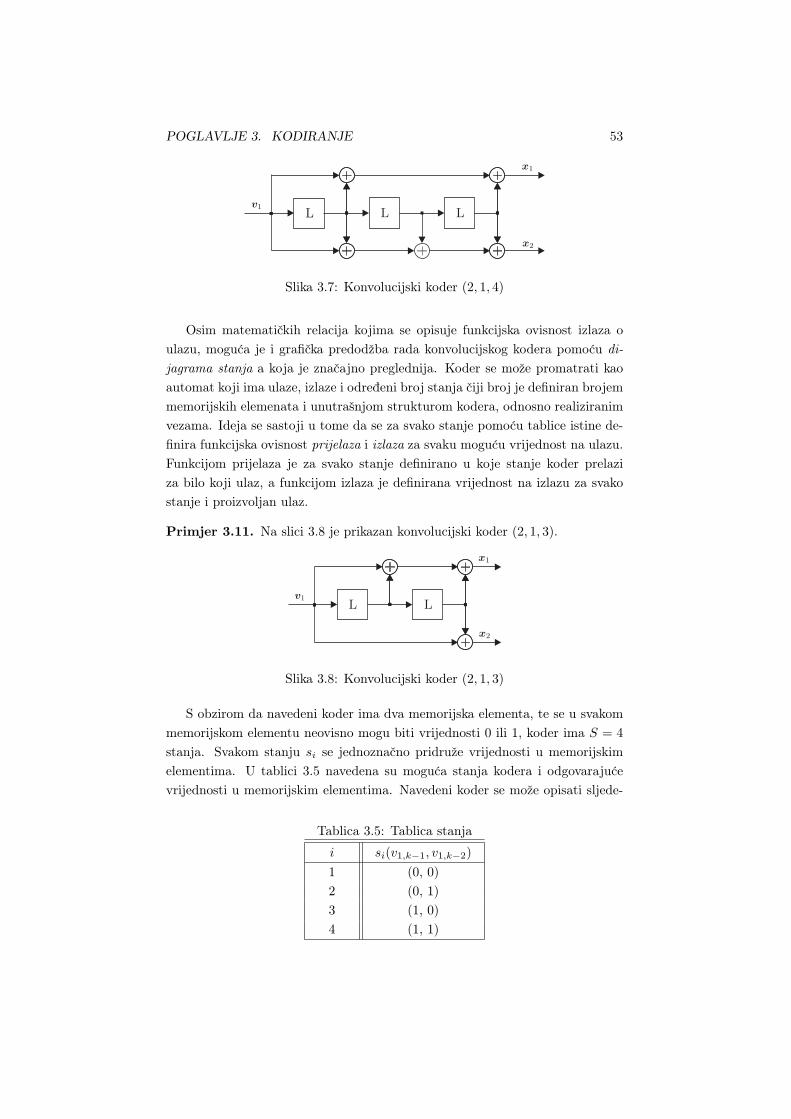
POGLAVLJE 3. KODIRANJE 53
Slika 3.7: Konvolucijski koder (2, 1, 4)
Osim matematičkih relacija kojima se opisuje funkcijska ovisnost izlaza oulazu, moguća je i grafička predodžba rada konvolucijskog kodera pomoću di-jagrama stanja a koja je značajno preglednija. Koder se može promatrati kaoautomat koji ima ulaze, izlaze i određeni broj stanja čiji broj je definiran brojemmemorijskih elemenata i unutrašnjom strukturom kodera, odnosno realiziranimvezama. Ideja se sastoji u tome da se za svako stanje pomoću tablice istine de-finira funkcijska ovisnost prijelaza i izlaza za svaku moguću vrijednost na ulazu.Funkcijom prijelaza je za svako stanje definirano u koje stanje koder prelaziza bilo koji ulaz, a funkcijom izlaza je definirana vrijednost na izlazu za svakostanje i proizvoljan ulaz.
Primjer 3.11. Na slici 3.8 je prikazan konvolucijski koder (2, 1, 3).
Slika 3.8: Konvolucijski koder (2, 1, 3)
S obzirom da navedeni koder ima dva memorijska elementa, te se u svakommemorijskom elementu neovisno mogu biti vrijednosti 0 ili 1, koder ima S = 4
stanja. Svakom stanju si se jednoznačno pridruže vrijednosti u memorijskimelementima. U tablici 3.5 navedena su moguća stanja kodera i odgovarajućevrijednosti u memorijskim elementima. Navedeni koder se može opisati sljede-
Tablica 3.5: Tablica stanja
i si(v1,k−1, v1,k−2)
1 (0, 0)2 (0, 1)3 (1, 0)4 (1, 1)

POGLAVLJE 3. KODIRANJE 54
ćom matricom prijenosnih funkcija:
G(D) =[1 +D +D2 1 +D2
], (3.70)
odnosno, izlazne vrijednosti se mogu izraziti u ovisnosti o ulaznoj vrijednosti uk-tom vremenskom intervalu i vrijednostima u memorijskim elementima:
x1,k = v1,k + v1,k−1 + v1,k−2,
x2,k = v1,k + v1,k−2.(3.71)
Prema tablici stanja 3.5 koristeći relacije (3.71) koje opisuju ovisnost izlaznihvrijednosti o ulaznim vrijednostima i vrijednostima u memorijskm elementimamože se definirati tablica istine: Iz tablice istine, konstruira se dijagram stanja,
Tablica 3.6: Tablica istine cikličkog koda (2, 1, 4)
Stanje v1,k (v1,k−1, v1,k−2, v1,k−3) (x1,k, x2,k) (v1,k, v1,k−1, v1,k−2)
s1 0 00 00 00s1 1 00 11 10s2 0 01 11 00s2 1 01 00 10s3 0 10 10 01s3 1 10 01 11s4 0 11 01 01s4 1 11 10 11
prikazan na slici 3.9. Punom linijom označeni su prijelazi između stanja zabinarni simbol 0 na ulazu, odnosno isprekidanom linijom su označeni prijelaziza binarni simnol 1 na ulazu u kode. Znamenke koje su naznačene uz pune iisprekidane linije su vrijednosti na izlazu iz kodera kod realizacije prijelaza kojipovezuje promatrana linija.
Slika 3.9: Dijagram stanja konvolucijskog kodera (2, 1, 2)
Osim pomoću dijagrama stanja, prikladan grafički prikaz konvolucijskogkoda je pomoću kodne rešetke koja je posebno prikladna za prikazivanje pos-

POGLAVLJE 3. KODIRANJE 55
tupka kodiranja i dekodiranja. Na sl. 3.10 je prikazana kodna rešetka za kod(2, 1, 2).
Slika 3.10: Kodna rešetka konvolucijskog kodera (2, 1, 2)
U svrhu određivanja svojstava konvolucijskoh kodova uvedene su mjere, odkojih se najčešće koriste:
• funkcija udaljenosti
• minimalna udaljenost
• minimalna slobodna udaljenost
Funkcija udaljenosti, di, je minimalna Hammingova udaljenost između svihparova izlaznih sekvenci duljine i uz uvjet da se pripadajuće ulazne sekvence raz-likuju u prvom m bitnom bloku. Ako se radi o linearnom konvolucijskom kodu,izlazna sekvenca koja ima samo nule se uzme kao referentna te se promatrajutežine izlaznih sekvenci:
di = min{w(x(i)
)|v(0) = 0
}(3.72)
gdje w iznačava funkciju težine, v(1) je grupa od m bitova ulazne sekvence u0-tom vremenskom intervalu v(1) = (v1,0, v2,0, . . . , vm,0), a x(i) izlazna sekvencaod i blokova, odnosno duljine ni:
x(i) = (x1,0, x2,0, . . . , xn,0, x1,1, x2,1, . . . , xn,1, . . . , x1,i−1, x2,i−1, . . . , xn,i−1)
(3.73)Dakle, di je funkcija ovisna o proizvoljno odabranom parametru i.
Minimalna udaljenost dmin konvolucijskog koda (n,m) ograničene duljine N
je jednaka vrijednosti funkcije udaljenosti za i = N , odnosno dmin = dN .Minimalna slobodna udaljenost, dfree je minimalna Hammingova udaljenost
između svih parova kodnih riječi konvolucijskog koda, odnosno za linearni kodekvivalentna je minimalnoj težini:
dfree = min {w(x)|x = 0} (3.74)
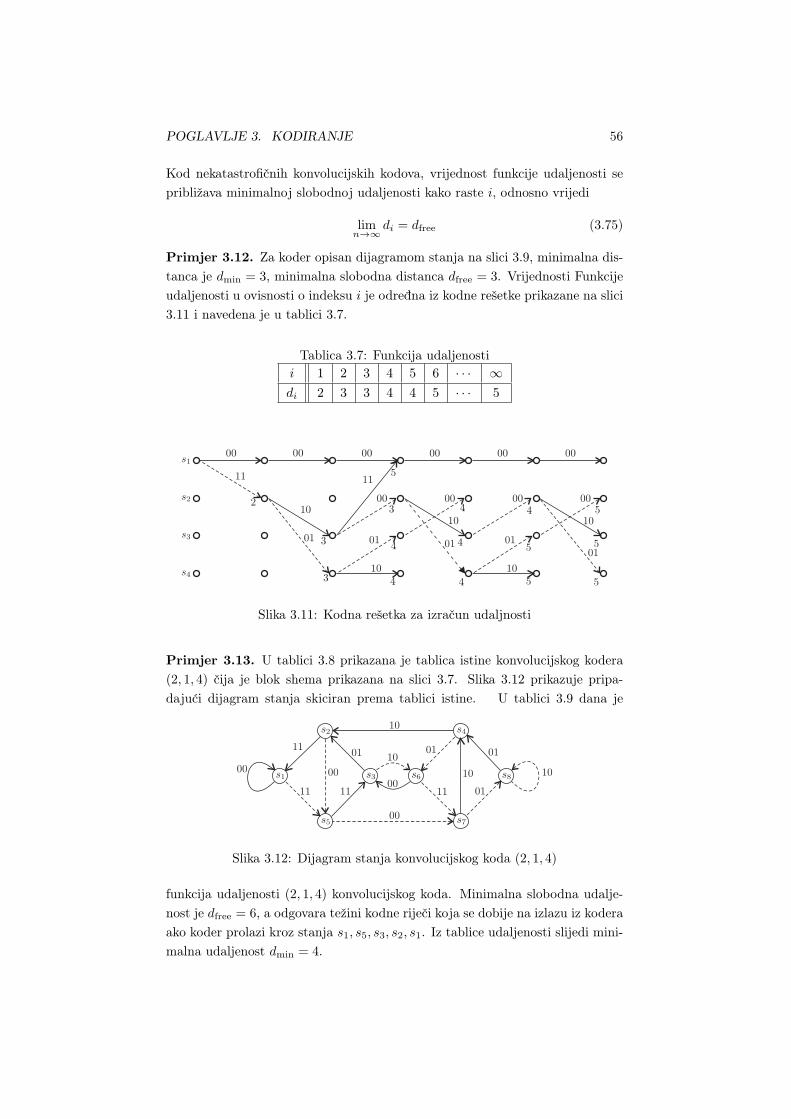
POGLAVLJE 3. KODIRANJE 56
Kod nekatastrofičnih konvolucijskih kodova, vrijednost funkcije udaljenosti sepribližava minimalnoj slobodnoj udaljenosti kako raste i, odnosno vrijedi
limn→∞
di = dfree (3.75)
Primjer 3.12. Za koder opisan dijagramom stanja na slici 3.9, minimalna dis-tanca je dmin = 3, minimalna slobodna distanca dfree = 3. Vrijednosti Funkcijeudaljenosti u ovisnosti o indeksu i je određna iz kodne rešetke prikazane na slici3.11 i navedena je u tablici 3.7.
Tablica 3.7: Funkcija udaljenostii 1 2 3 4 5 6 · · · ∞di 2 3 3 4 4 5 · · · 5
Slika 3.11: Kodna rešetka za izračun udaljnosti
Primjer 3.13. U tablici 3.8 prikazana je tablica istine konvolucijskog kodera(2, 1, 4) čija je blok shema prikazana na slici 3.7. Slika 3.12 prikazuje pripa-dajući dijagram stanja skiciran prema tablici istine. U tablici 3.9 dana je
Slika 3.12: Dijagram stanja konvolucijskog koda (2, 1, 4)
funkcija udaljenosti (2, 1, 4) konvolucijskog koda. Minimalna slobodna udalje-nost je dfree = 6, a odgovara težini kodne riječi koja se dobije na izlazu iz koderaako koder prolazi kroz stanja s1, s5, s3, s2, s1. Iz tablice udaljenosti slijedi mini-malna udaljenost dmin = 4.

POGLAVLJE 3. KODIRANJE 57
Tablica 3.8: Tablica istine cikličkog koda (2, 1, 4)
Stanje v1,k (v1,k−1, v1,k−2, v1,k−3) (x1,k, x2,k) (v1,k, v1,k−1, v1,k−2)
s1 0 000 00 000s1 1 000 11 100s2 0 001 11 000s2 1 001 00 100s3 0 010 01 001s3 1 010 10 101s4 0 011 10 001s4 1 011 01 101s5 0 100 11 010s5 1 100 00 110s6 0 101 00 010s6 1 101 11 110s7 0 110 10 011s7 1 110 01 111s8 0 111 01 011s8 1 111 10 111
Tablica 3.9: Funkcija udaljenosti cikličkog koda (2, 1, 4)
i 1 2 3 4 5 6 7 8 9 10 11 · · · ∞di 2 2 3 4 4 4 5 5 6 6 6 · · · 6
U tablicama 3.10, 3.11 i 3.12 dani su primjeri generator sekvenci za konvo-lucijske kodove.
dodati Puncured convolutional codesDekoder najveće poduarnosti (maximum likelihood - ML) odlučuje u ko-
rist one kodne riječi koja ima najmanju udaljenost prema primljenom signalu.Najmanja udaljenost se izražava preko maksimalne uvjetne vjerojatnosti:
DML(y) , argmax∀v
P (y|x) (3.76)
gdje je yi primljeni vektor, a xi vektor koji se dobije kodiranjem sekvence v.Uz pretpostavku diskretnog kanala bez memorije (discreete memoryless channel- DMC) izraz (3.76) može se pisati:
DML(y) , argmax∀v
L−1∏i=0
P (yi|xi) ≡ argmax∀v
[log
L−1∏i=0
P (yi|xi)
]
= argmax∀v
[L−1∑i=0
logP (yi|xi)
] (3.77)

POGLAVLJE 3. KODIRANJE 58
Tablica 3.10: Vrijednost generatorsekvenci za (2, 1, N) konvolucijskikod
N g(1)1 g
(2)1 dfree
3 5 7 54 64 74 65 46 72 76 65 57 87 554 744 10
Tablica 3.11: Vrijednost generatorsekvenci za (3, 1, N) konvolucijskikod
N g(1)1 g
(2)1 g
(3)1 dfree
3 5 7 7 84 54 64 74 105 52 66 76 126 47 53 75 137 554 624 764 15
Tablica 3.12: Vrijednost generator sekvenci za (3, 2, N) konvolucijski kod
Ng(1)1 g
(2)1 g
(3)1 dfree
g(1)2 g
(2)2 g
(3)2
2 6 2 6 32 4 4
3 4 2 6 41 4 7
3 7 1 4 52 5 7
4 60 30 70 614 40 74
4 64 30 64 630 64 74
gdje je yi primljeni vektor, a xi vektor koji pripada stazi koja se dobije kodira-njem sekvence v, a odnosi se na i-ti vremenski interval. Uz primjenu bipolarnogprijenosa binarno kodirane sekvence simetričnim DMC komunikacijskim kana-lom uz tvrdo odlučivanje s vjerojatnošću greške pe, vjerojatost greške za i-tiinterval je:
log [P (yi|xi)] = log[pdH(yi,xi)e (1− pe)
n−dH(yi,xi)]
= −dH(yi,xi) log1− pepe
+ n log(1− pe)
= −AdH(yi,xi)−B
(3.78)
gdje je dH(yi,xi) Hammingova udaljenost između vektora yi i xi, a yi je tvrdoodlučeni simboli u i-tom intervalu iz primljene sekvence y, a A i B su poitivnekonstante. Iz izraza (3.78) može se zaključiti da je ML dekodiranje uz primjenutvrdog odlučivanja ekvivalentno pronalaženju sekvence minimalne Hammingoveudaljenosti između tvrdo odlučene primljene sekvence i staze u kodnoj rešetki

POGLAVLJE 3. KODIRANJE 59
Slika 3.13: Dekodiranje konvolucijskog koda (2, 1, 3) pomoću kodne rešetke
konvolucijskog koda. Dakle, vrijedi:
DML(y) , argmin∀v
L−1∑i=0
dH(yi,xi) (3.79)
minimizacija izraza (3.79) može se postići pomoću Viterbijevog algoritma. De-kodiranje konvolucijskih kodova s Viterbijevim algoritmom zasniva se na pro-nalaženju puta minimalne težine prateći u svakom koraku onoliko puteva kolikoima stanja (u našem primjeru 4). Za svaki primljeni par simbola Viterbijev algo-ritam pridjeljuje težinu putu između dva stanja u skladu s pripadnom Hammin-govom distancom. Na sl. 3.13 je prikazano dekodiranje sekvence y = (11 01 11).Puna linija označava binarnu nulu, a isprekidana jedinicu. Primljena sekvencaje upisana u pripadajućim vremenskim intervalima iznad rešetke. Iznad linijakoje povezuju dva stanja je naznačen par bitova koji se generiraju pri prijelazukodera između ta dva stanja, a na kraju linije je akumulirana Hammingovaudaljenost koja se dobije kao zbroj dosegnute udaljenosti iz polaznog stanja iHammingove udaljenosti između primljenog para bitova u promatranom vre-menskom intervalu i para bitova koji se generira pri promatranom prijelazu. Naprimjer, stanje s3,2 je dosegnuto s binarnim simbolom 1 s polaskom iz stanjas1,1. Pri tom prijelazu koder generira par bitova 11 a primljeni par je 01 teje Hammingova udaljenost jednaka 1. S obzirom da je stanje s1,1 dosegnuto stežinom 2, akumulirana težina staze u stanju s3,2 je 3. Nakon 3 koraka svakood stanja dosegnuto je sa po 2 puta od kojih svaki ima ukupnu težinu označenubrojkom. Za daljnji rad, Viterbijev dekoder eliminira po jedan od dolaznih pu-teva u svako od stanja i to onaj veće težine tako da nastavlja dalje pratiti 4puta. Ako je stanje dosegnuto s dvije staze jednake težine, npr. s3,3 tada seodbacuje poizvoljna staza.
Kodirana modulacija (TCM) Tehnike sigurnosnog kodiranja zasnovane bilo na blok-shemama ili konvolucijskim shemama, nude dobra rješenja glede kontrole grešaka, ali imaju i jedno nepovoljno svojstvo, jer zahtijevaju to vecu pojasnu širinu kanala što je veci iznos redundancije. Što se tice pojasne širine raspolocivih kanala, u praksi su, moguce dvije tipicne situacije:
- pojasna širina je proizvoljna, tj. projektant sustava određuje optimalnu širinu s obzirom na tehničko-ekonomske faktore;
- pojasna širina raspoloživa kanala je posve određena, tj. ograničena je gornjom i donjom graničnom frekvencijom (tako npr. za telefonski kanal javne komutirane telefonske mreže Δf (=) 4 kHz).
U prvom slučaju, povećanje redundancije, pa time i brzine signalizacije u načelu nema ograničenja. Međutim, povećanjem pojasne širine, a koje je obrnuto proporcionalno koeficijentu prijenosa ρ = m/n, raste i snaga šuma, čime je izravno umanjena učinkovitost, odnosno kodni dobitak primijenjenog kôda. To znači da će kôd morati sadržavati značajno više redundancije, realizirane složenom shemom kodiranja, kako bi se kompenziralo smanjenje signal-šum omjera. Ovo je jedino moguće rješenje za sustave čija je snaga ograničena, što je tipičan slučaj u satelitskim komunikacijama. Tehnička složenost, cijena opreme, te kašnjenje informacije ograničavajući su čimbenici u ovakvim situacijama. U drugom slučaju, tj. kad je riječ o strogo (pojasno) ograničenim kanalima, brzina signalizacije je ograničena. Maksimalna brzina signalizacije od 1/T impulsa u sekundi (bauda) ostvaruje se oblikovanjem impulsa u skladu s I Nyquistovim kriterijem /1/, što zahtijeva 1/T Hz sa svake strane frekvencije signala nosioca. Na ovaj je način, uz idealnu sinkronizaciju, izbjegnuta intersimbolska interferencija. Uz ovako ograniceni kapacitet kanala, povećanje redundancije kôda zahtijeva ili smanjenje brzine prijenosa informacije (poglavlje 7.5), ili korištenje višerazinskih modulacija tipa M-PSK, QAM ili slično. Smanjenje brzine prijenosa informacije je moguće samo u komunikacijama koje nisu kontinuirane, odnosno nisu "real-time" tipa. Glavnina informacija je ipak "real-time" tipa (npr. govor i TV), pa su potrebne djelotvorne tehnike kodiranja koje kombiniraju sigurnosno kodiranje temeljeno na blok- ili konvolucijskim kodovima s višerazinskim modulacijama. Kombiniranje kodiranja i modulacije može se tretirati kao združivanje dvaju odvojenih postupaka (klasičan pristup), ili pak kao sintezu dvaju postupaka. Posljednja tehnika je zanimljivija i rezultirajuci kodovi pripadaju u kodove definirane u prostoru signala ("signal-space codes"), odnosno u tzv. TCM ili trellis kodirane modulacije. TCM ("Trellis Coded Modulation") podrazumijevaju korištenje konvolucijskog kodiranja. Klasično kodiranje za pojasno ograničene kanale Klasični sustavi sa sigurnosnim kodiranjem, koji ne zahtijevaju povećanje pojasne širine kanala, temelje se na kombiniranju odvojenih postupaka blok- ili konvolucijskog kodiranja i višerazinske modulacije (sl. 13.1).
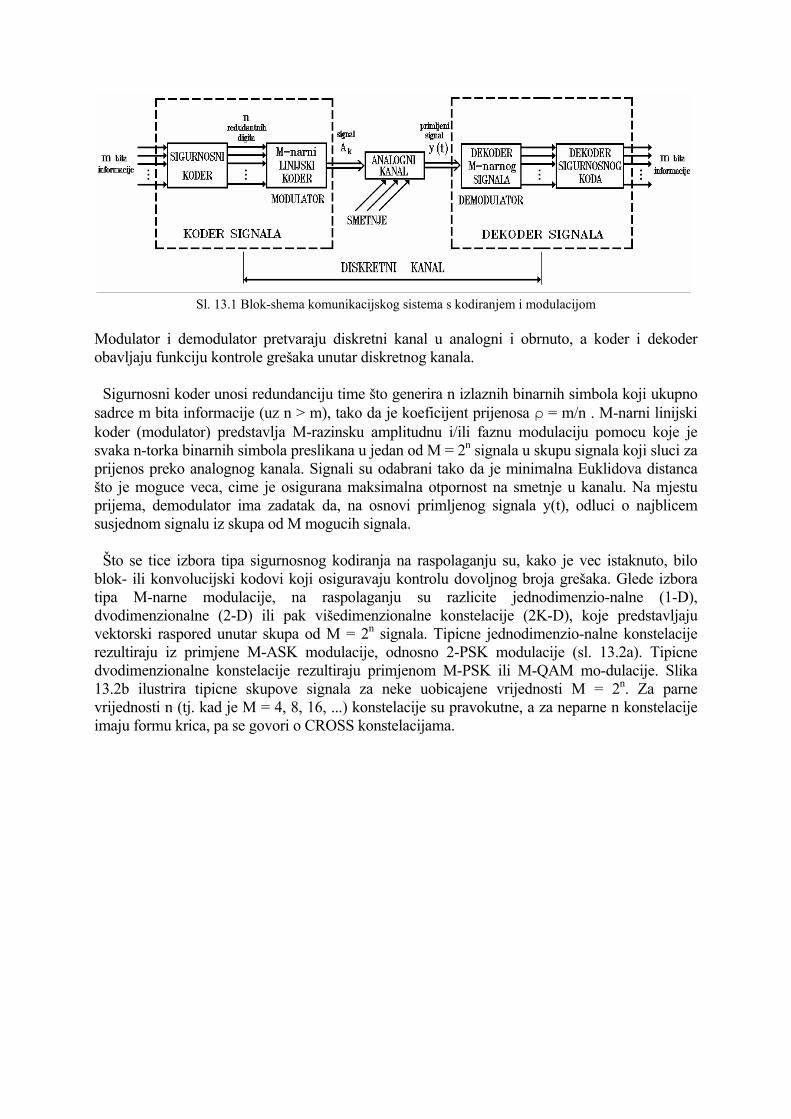
Sl. 13.1 Blok-shema komunikacijskog sistema s kodiranjem i modulacijom Modulator i demodulator pretvaraju diskretni kanal u analogni i obrnuto, a koder i dekoder obavljaju funkciju kontrole grešaka unutar diskretnog kanala. Sigurnosni koder unosi redundanciju time što generira n izlaznih binarnih simbola koji ukupno sadrce m bita informacije (uz n > m), tako da je koeficijent prijenosa ρ = m/n . M-narni linijski koder (modulator) predstavlja M-razinsku amplitudnu i/ili faznu modulaciju pomocu koje je svaka n-torka binarnih simbola preslikana u jedan od M = 2n signala u skupu signala koji sluci za prijenos preko analognog kanala. Signali su odabrani tako da je minimalna Euklidova distanca što je moguce veca, cime je osigurana maksimalna otpornost na smetnje u kanalu. Na mjestu prijema, demodulator ima zadatak da, na osnovi primljenog signala y(t), odluci o najblicem susjednom signalu iz skupa od M mogucih signala. Što se tice izbora tipa sigurnosnog kodiranja na raspolaganju su, kako je vec istaknuto, bilo blok- ili konvolucijski kodovi koji osiguravaju kontrolu dovoljnog broja grešaka. Glede izbora tipa M-narne modulacije, na raspolaganju su razlicite jednodimenzio-nalne (1-D), dvodimenzionalne (2-D) ili pak višedimenzionalne konstelacije (2K-D), koje predstavljaju vektorski raspored unutar skupa od M = 2n signala. Tipicne jednodimenzio-nalne konstelacije rezultiraju iz primjene M-ASK modulacije, odnosno 2-PSK modulacije (sl. 13.2a). Tipicne dvodimenzionalne konstelacije rezultiraju primjenom M-PSK ili M-QAM mo-dulacije. Slika 13.2b ilustrira tipicne skupove signala za neke uobicajene vrijednosti M = 2n. Za parne vrijednosti n (tj. kad je M = 4, 8, 16, ...) konstelacije su pravokutne, a za neparne n konstelacije imaju formu krica, pa se govori o CROSS konstelacijama.
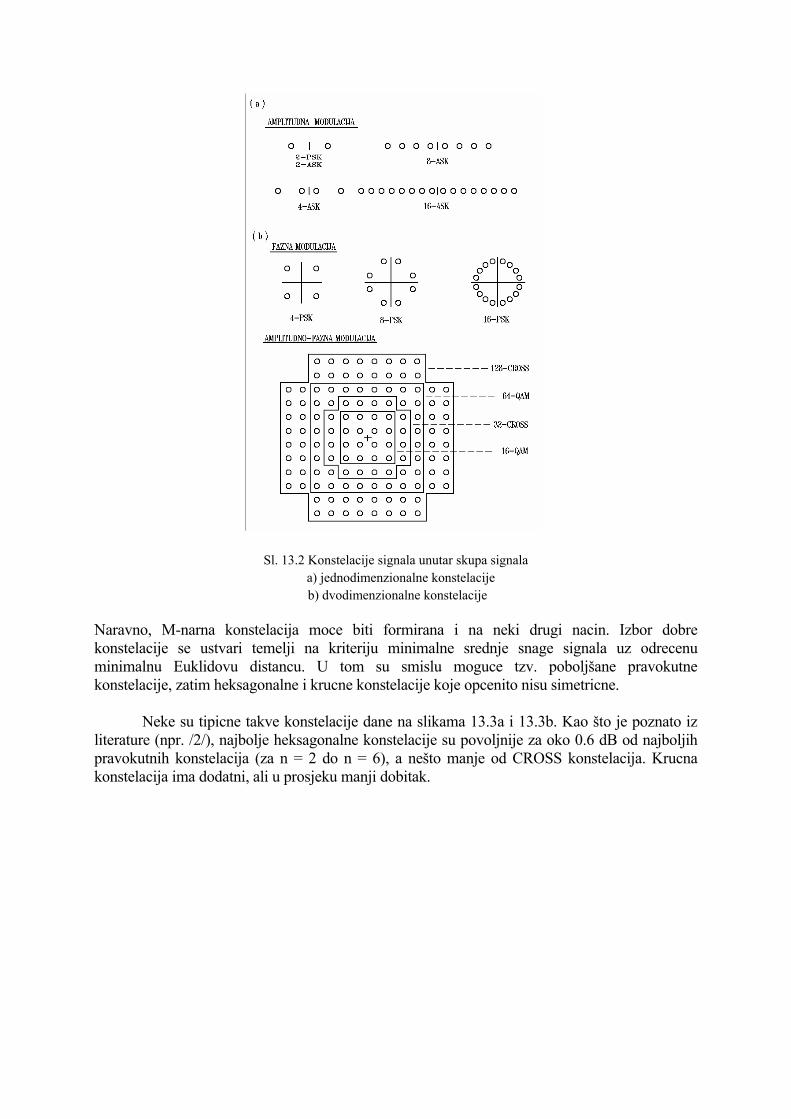
Sl. 13.2 Konstelacije signala unutar skupa signala a) jednodimenzionalne konstelacije
b) dvodimenzionalne konstelacije Naravno, M-narna konstelacija moce biti formirana i na neki drugi nacin. Izbor dobre konstelacije se ustvari temelji na kriteriju minimalne srednje snage signala uz odrecenu minimalnu Euklidovu distancu. U tom su smislu moguce tzv. poboljšane pravokutne konstelacije, zatim heksagonalne i krucne konstelacije koje opcenito nisu simetricne. Neke su tipicne takve konstelacije dane na slikama 13.3a i 13.3b. Kao što je poznato iz literature (npr. /2/), najbolje heksagonalne konstelacije su povoljnije za oko 0.6 dB od najboljih pravokutnih konstelacija (za n = 2 do n = 6), a nešto manje od CROSS konstelacija. Krucna konstelacija ima dodatni, ali u prosjeku manji dobitak.
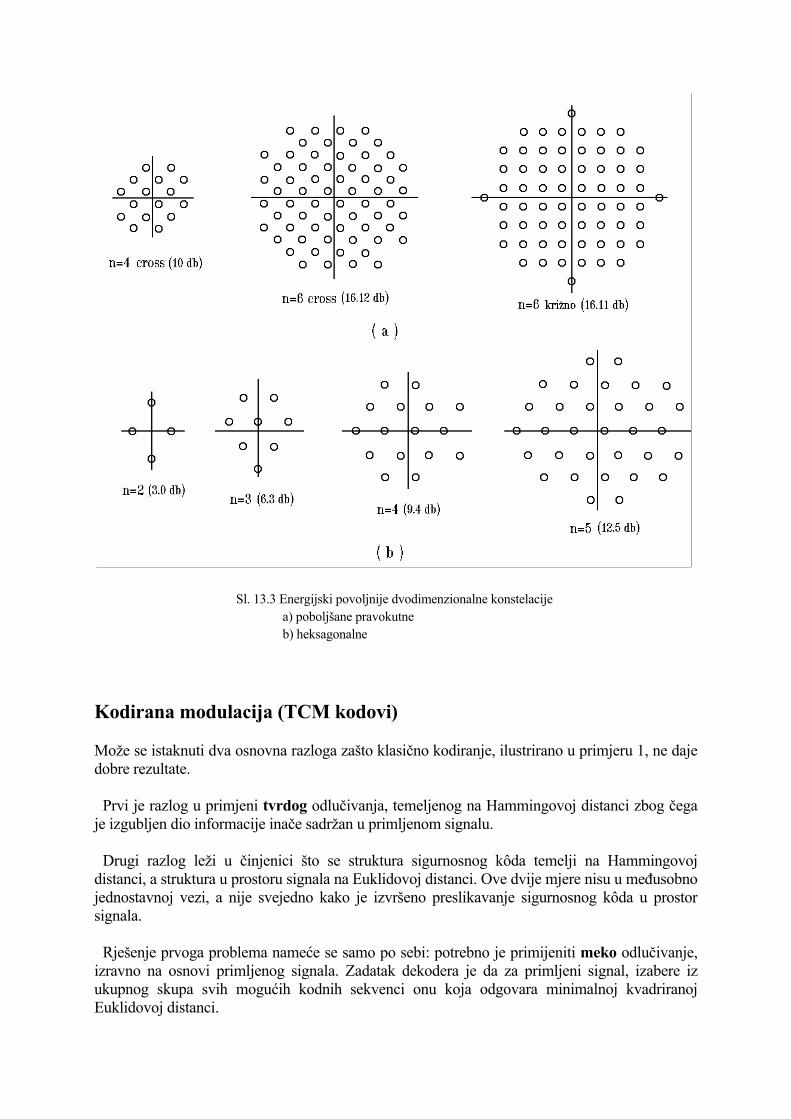
Sl. 13.3 Energijski povoljnije dvodimenzionalne konstelacije a) poboljšane pravokutne b) heksagonalne Kodirana modulacija (TCM kodovi) Može se istaknuti dva osnovna razloga zašto klasično kodiranje, ilustrirano u primjeru 1, ne daje dobre rezultate. Prvi je razlog u primjeni tvrdog odlučivanja, temeljenog na Hammingovoj distanci zbog čega je izgubljen dio informacije inače sadržan u primljenom signalu. Drugi razlog leži u činjenici što se struktura sigurnosnog kôda temelji na Hammingovoj distanci, a struktura u prostoru signala na Euklidovoj distanci. Ove dvije mjere nisu u međusobno jednostavnoj vezi, a nije svejedno kako je izvršeno preslikavanje sigurnosnog kôda u prostor signala. Rješenje prvoga problema nameće se samo po sebi: potrebno je primijeniti meko odlučivanje, izravno na osnovi primljenog signala. Zadatak dekodera je da za primljeni signal, izabere iz ukupnog skupa svih mogućih kodnih sekvenci onu koja odgovara minimalnoj kvadriranoj Euklidovoj distanci.

PRIMJER 13.2: Nekodirani 4-PSK system
a) konstelacijski dijagram (skup signala) b) kodna rešetka i jedna od mogucih sekvenci
Slika 13.4 ilustrira skup signala i kodnu rešetku nekodiranog 4-PSK signala. Kodna rešetka ima samo
jedno stanje. Prijelaz iz stanja u stanje od intervala do intervala signalizacije, odrecen je sa 4 paralelna prijelaza od kojih su svi moguci, tako da nekodirani sistem nema ogranicenja na posebne sekvence signala. Dekoder 4-PSK nekodiranog sistema donosi odluku u svakom intervalu i neovisno o signalu u susjednim intervalima.
Ovako realizirani kodovi su tzv. trellis kodovi, odnosno kodovi u prostoru signala ("signal-space codes"). U analizi iznesenoj u /3/ ovakav prilaz predvica kodni dobitak od 7 dB do 8 dB u odnosu prema nekodiranom sistemu. Također je pokazano, da se glavnina tog dobitka ostvaruje proširenjem prostora signala samo za dva puta, što znači da je potrebno dodati samo 1 redundantni bit na m bita informacije. Zbog velikog doprinosa autora spomenutog clanka u analizi i primjeni ovakvih trellis kodova, oni se obicno nazivaju i Ungerboeckovi kodovi. 13.4 UNGERBOECKOVI KODOVI Standardni Ungerboeckovi kodovi koriste (n,n-1) konvolucijske kodove kojima se pridrucuje skup od 2m+1 = 2n signala unutar 2-D prostora. Nacin preslikavanja kodnog prostora u prostor signala je definiran zahtjevom da se maksimira minimalna Euklidova distanca izmecu najblicih sekvenci. Buduci da se TCM koder moce smatrati sistemom s konacnim brojem stanja, postupak kodiranja se moce opisati kodnom rešetkom kao i u konvolucijskih kodova. Svako stanje ima 2m prijelaza u drugo stanje. Svakom prijelazu iz jednog stanja u drugo potrebno je pridruciti jedan od 2n signala tako da Euklidova distanca bude maksimalna. U tu svrhu Ungerboeck je predlocio sistematsku proceduru za preslikavanje na osnovi dijeljenja skupa /4/, koja se zasniva na sukcesivnom dijeljenju skupa signala u podskupove cija minimalna Euklidova distanca iz koraka u korak dijeljenja raste. Broj podskupova na kraju dijeljenja je 2m. Broj kodiranih informacijskih digita m ne mora opcenito biti jednak n-1 (više u poglavlju 13.5). Inace za opci postupak preslikavanja zasnovanog na dijeljenju skupa vrijede slijedeca heuristicka pravila: -Da se maksimira otpornost na slucajne greške (greške ducine 1), paralelnim granama u kodnoj
rešetki pridrucuju se signali maksimalne distance. -Da se maksimira otpornost na višestruke greške, za sve ulazne, odnosno izlazne prijelaze nekog
stanja, treba birati takve signale iz podskupa da Euklidova distanca izmecu dva najblica puta bude maksimalna.
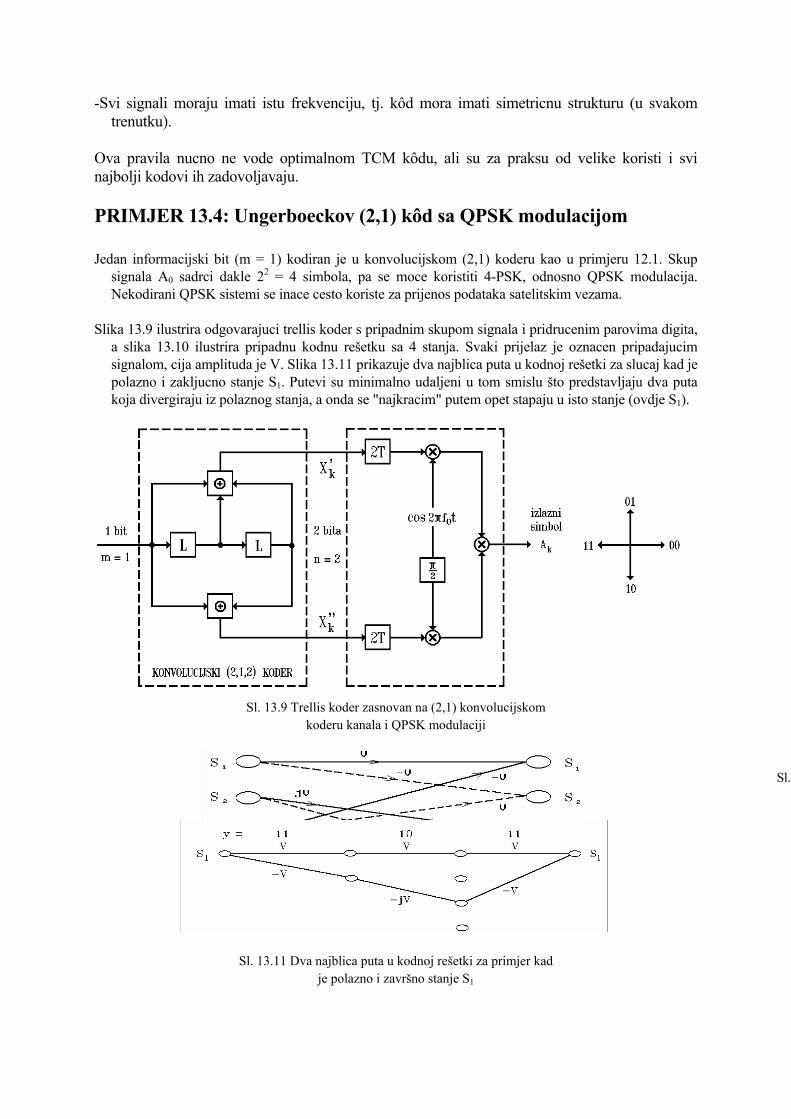
-Svi signali moraju imati istu frekvenciju, tj. kôd mora imati simetricnu strukturu (u svakom trenutku).
Ova pravila nucno ne vode optimalnom TCM kôdu, ali su za praksu od velike koristi i svi najbolji kodovi ih zadovoljavaju. PRIMJER 13.4: Ungerboeckov (2,1) kôd sa QPSK modulacijom Jedan informacijski bit (m = 1) kodiran je u konvolucijskom (2,1) koderu kao u primjeru 12.1. Skup
signala A0 sadrci dakle 22 = 4 simbola, pa se moce koristiti 4-PSK, odnosno QPSK modulacija. Nekodirani QPSK sistemi se inace cesto koriste za prijenos podataka satelitskim vezama.
Slika 13.9 ilustrira odgovarajuci trellis koder s pripadnim skupom signala i pridrucenim parovima digita,
a slika 13.10 ilustrira pripadnu kodnu rešetku sa 4 stanja. Svaki prijelaz je oznacen pripadajucim signalom, cija amplituda je V. Slika 13.11 prikazuje dva najblica puta u kodnoj rešetki za slucaj kad je polazno i zakljucno stanje S1. Putevi su minimalno udaljeni u tom smislu što predstavljaju dva puta koja divergiraju iz polaznog stanja, a onda se "najkracim" putem opet stapaju u isto stanje (ovdje S1).
Sl. 13.9 Trellis koder zasnovan na (2,1) konvolucijskom koderu kanala i QPSK modulaciji
Sl.
Sl. 13.11 Dva najblica puta u kodnoj rešetki za primjer kad
je polazno i završno stanje S1

Neka je početno stanje S1 i neka redom nadolaze nule, pa se može definirati trajektorija za slučaj minimalne greške, odnosno može se izracunati minimalna Euklidova distanca:
Euklidova distanca je dana sa:
tj:
Opcenito, ako se uzme da dvije grane koje izlaze iz svakog cvora imaju distancu 2V (svi parovi grana iz
cvorova su vektori u suprotnom smjeru), kao i da dvije grane koje ulaze u cvor imaju distancu 2V, minimalna distanca je:
Nakon dva divergentna puta, sve moguce kombinacije slijedecih grana imaju distancu:
pa je zaista:
za sve moguće trajektorije stanja. Svaka moguća trajektorija stanja ima samo jedan događaj-grješku na distanci de,min, i to je baš pogrešan simbol koji je moguće korigirati.
Za usporedbu s nekodiranim sustavom prijenosa, tj. 2-PSK uz abecedu ±V, te uzevši najpesimističniji
slučaj da je p(pogrešnog bita) = p(pogrešnog simbola), za nekodirani 2-PSK je vjerojatnost greške po bitu /1/:
Za naš kodirani sistem je:
gdje je σ devijacija šuma (σ2 - varijanca šuma). Slijedi da je kodirani sustem povoljniji za:
Dakle, ako se umjesto 4-PSK sistema (nekodirani sistem) prije obavi konvolucijsko kodiranje, te upotrijebi meko dekodiranje, moguće je, i bez povećanja pojasne širine kanala, ostvariti dobitak od gotovo 4 dB.
13.5 Složeni TCM kodovi
y - x e , m i n = d (13.2)
2 2 2 2 e , m i n
2 2 2 2 e , m i n
= | V + V + | V + j V + |V + V | | |d
= 8 + ( 2 V = 10 )d V V
e , m i n = 10 Vd
2 2e , m i n ( 2 V + ( 2 V = 8 V) )d ≥
d = 2
2 2 2e , m i n ( 2 V + ( 2 V + 2 = 10 V) )d V≥
2- ye
y
V 1 = Q ; Q ( y ) = d yp eσ π
∞⎛ ⎞⎜ ⎟⎝ ⎠ ∫
e s 10 V= = Q p p2 σ
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
1020 l o g 4 d B2
≈

Općenito uzevši, svi ulazni digiti u višerazinski modulator ne moraju biti kodirani u konvolucijskom koderu (sl. 13.12). Na ovaj je nacin moguće uz jedan te isti (m1+1,m1) koder koristiti prostor signala koji je širi od: 1 + 1m2 . Ako je dakle broj kodiranih digita m1, broj signala u skupu je 2m+1, tako da je moguc odabir proizvoljno velikog broja tocaka u prostoru signala. Nekodirani digiti ne utjecu na broj stanja, kao ni na oblik kodne rešetke u kojoj su prijelazi iz jednog u drugo stanje potpuno odreceni kodiranim digitima, ali ti prijelazi dobivaju paralelne prijelaze, ciji je broj odrecen brojem nekodiranih digita i jednak je 1m-m2 291. Prakticki, ova je situacija prisutna u primjeru 13.3. Na slici 13.8 vidi se da je drugi digit xk,2 nekodiran tako da kodna rešetka na slici 13.7a ima par paralelnih prijelaza, svaki za po jednu binarnu vrijednost ulaza xk,2. S obzirom na opisani postupak preslikavanja tehnikom sukcesivnog dijeljenja skupa na podskupove, kodirani digiti odrecuju podskupove koji ce biti upotrijebljeni za svaki signal (simbol). Preostali, tj. nekodirani digiti odrecuju tocke u odabranim podskupovima. Paralelni prijelazi mogu biti u postupku dekodiranja izvor greške, jer kôd ne sprecava mogucnost da jedan od paralelnih prijelaza zamijeni onaj koji je pravi. Radi minimiziranja ove vjerojatnosti, Euklidova distanca izmecu simbola koji odgovaraju paralelnim prijelazima mora biti maksimizirana. U tu svrhu simbole za paralelne prijelaze treba birati iz istog podskupa koji, za primjer M-PSK konstelacije, cini svaki par dijametralno suprotnih signala. Npr. za M = 8: Opisani opci pristup trellis kodiranja omogucuje neovisan izbor konstelacije od izbora upotrijebljene sheme kodiranja, tako da je moguce prilagocavanje raspolocivu kanalu neovisno o razini unesene redundancije. Mecutim, uz odreceni broj kodiranih bitova u konvolucijskom koderu, dodavanjem nekodiranih bitova radi smanjenja potrebne pojasne širine kanala, neminovno ce se izazivati opadanje kodnog dobitka. Za ovaj slucaj, Euklidova distanca TCM koda moce biti odrecena iz relacije:
gdje je dm1+1 minimalna distanca izmecu paralelnih prijelaza, a dm1 oznacava minimalnu distancu izmecu neparalelnih putova u kodnoj rešetki TCM kôda. Kad su svi digiti kodirani, tj. vrijedi m1 = m, podskupovi sadrce samo jedan signal tako da nema paralelnih prijelaza.
1 1 f + 1 m m= m i n , d d d⎡ ⎤⎣ ⎦
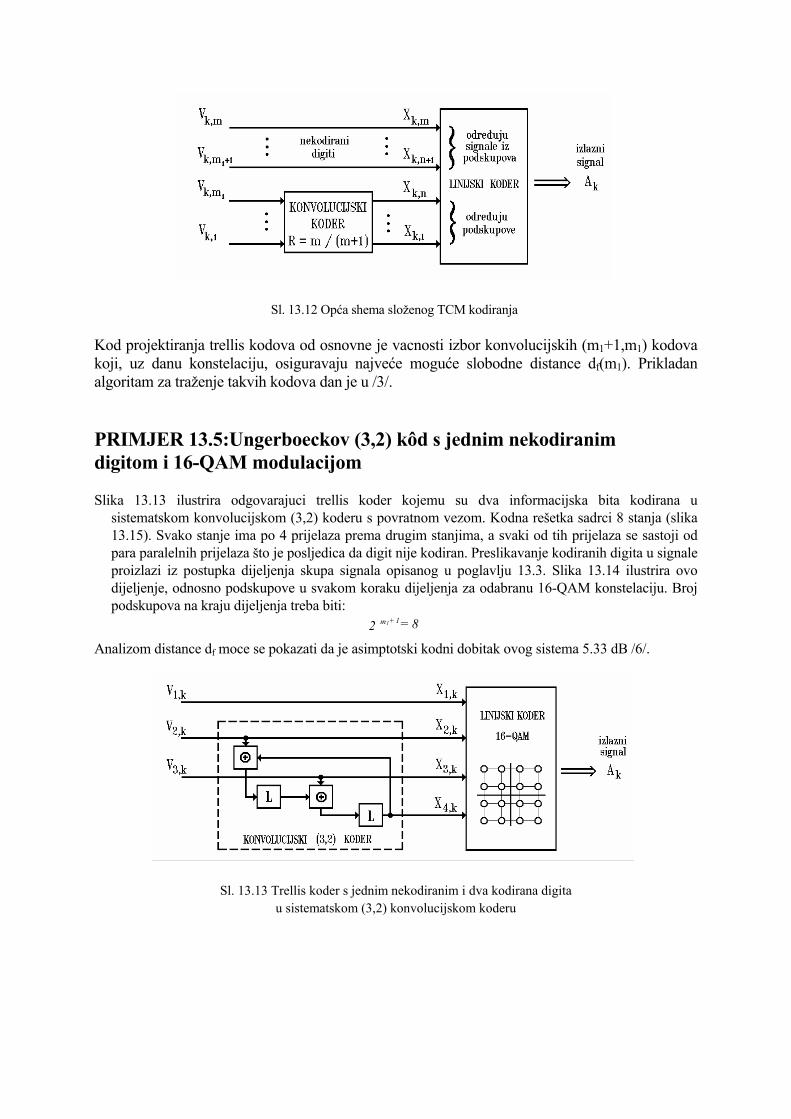
Sl. 13.12 Opća shema složenog TCM kodiranja Kod projektiranja trellis kodova od osnovne je vacnosti izbor konvolucijskih (m1+1,m1) kodova koji, uz danu konstelaciju, osiguravaju najveće moguće slobodne distance df(m1). Prikladan algoritam za traženje takvih kodova dan je u /3/. PRIMJER 13.5:Ungerboeckov (3,2) kôd s jednim nekodiranim digitom i 16-QAM modulacijom Slika 13.13 ilustrira odgovarajuci trellis koder kojemu su dva informacijska bita kodirana u
sistematskom konvolucijskom (3,2) koderu s povratnom vezom. Kodna rešetka sadrci 8 stanja (slika 13.15). Svako stanje ima po 4 prijelaza prema drugim stanjima, a svaki od tih prijelaza se sastoji od para paralelnih prijelaza što je posljedica da digit nije kodiran. Preslikavanje kodiranih digita u signale proizlazi iz postupka dijeljenja skupa signala opisanog u poglavlju 13.3. Slika 13.14 ilustrira ovo dijeljenje, odnosno podskupove u svakom koraku dijeljenja za odabranu 16-QAM konstelaciju. Broj podskupova na kraju dijeljenja treba biti:
Analizom distance df moce se pokazati da je asimptotski kodni dobitak ovog sistema 5.33 dB /6/.
Sl. 13.13 Trellis koder s jednim nekodiranim i dva kodirana digita
u sistematskom (3,2) konvolucijskom koderu
1 + 1m = 82
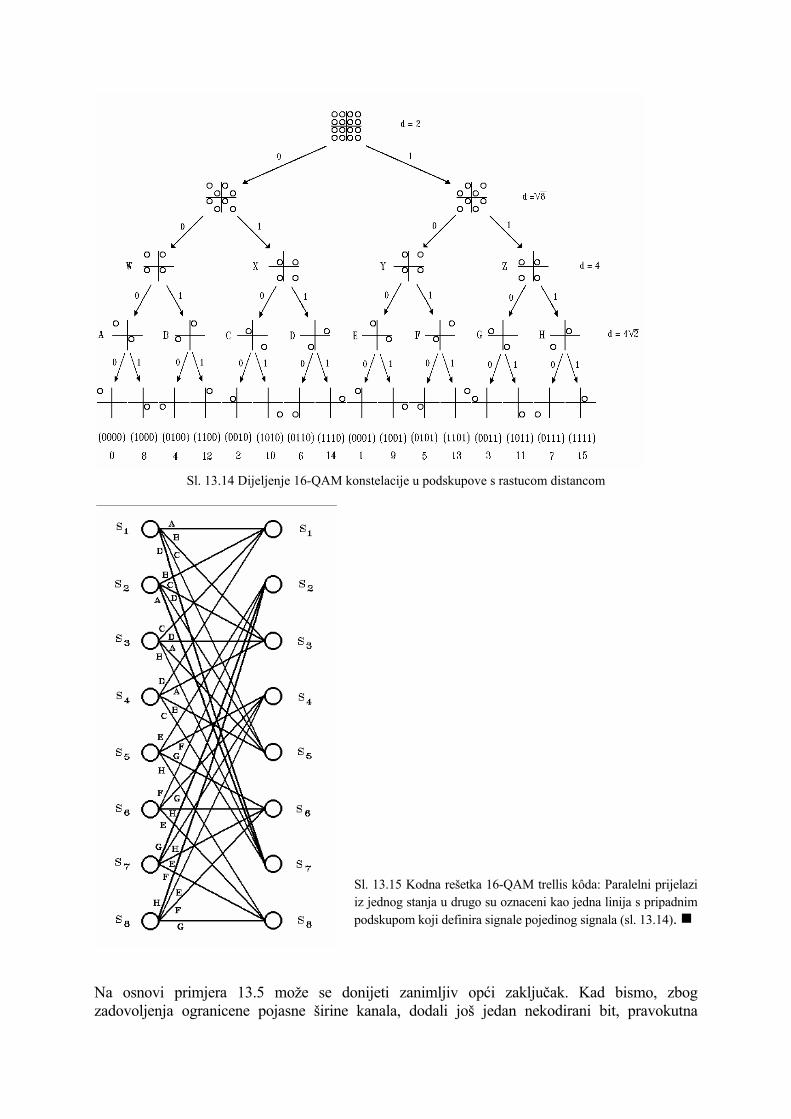
Sl. 13.14 Dijeljenje 16-QAM konstelacije u podskupove s rastucom distancom
Sl. 13.15 Kodna rešetka 16-QAM trellis kôda: Paralelni prijelazi iz jednog stanja u drugo su oznaceni kao jedna linija s pripadnim podskupom koji definira signale pojedinog signala (sl. 13.14).
Na osnovi primjera 13.5 može se donijeti zanimljiv opći zaključak. Kad bismo, zbog zadovoljenja ogranicene pojasne širine kanala, dodali još jedan nekodirani bit, pravokutna
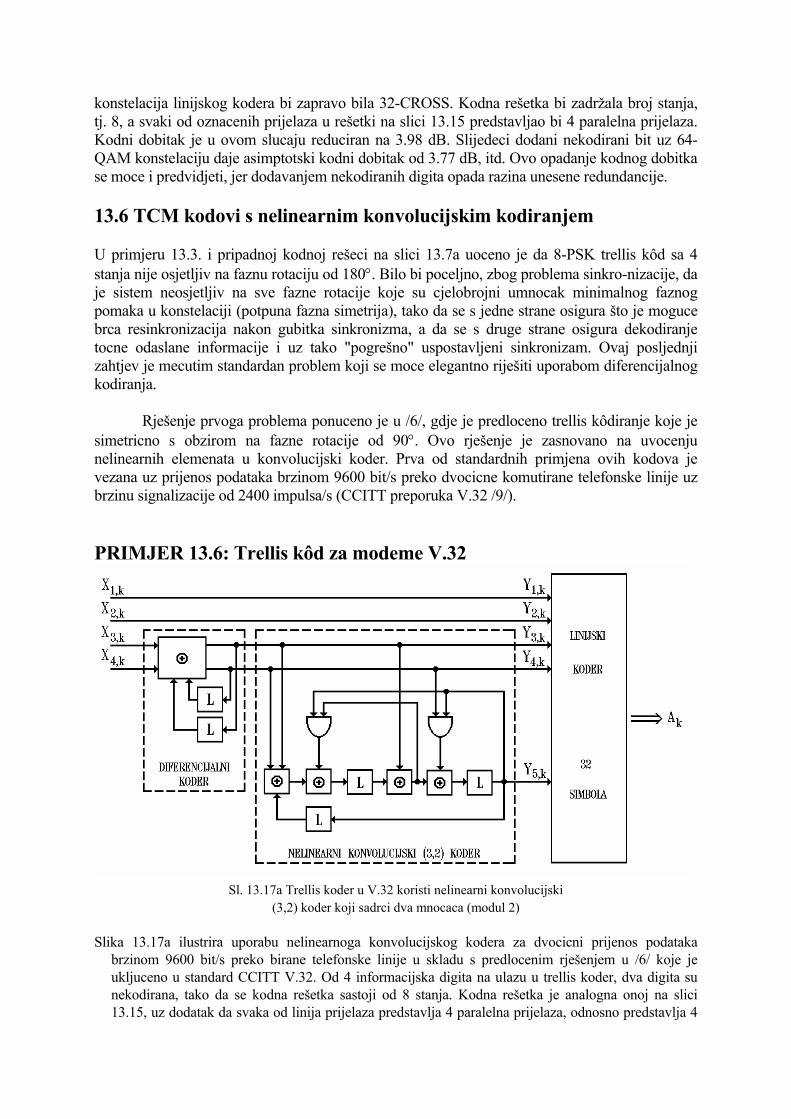
konstelacija linijskog kodera bi zapravo bila 32-CROSS. Kodna rešetka bi zadržala broj stanja, tj. 8, a svaki od oznacenih prijelaza u rešetki na slici 13.15 predstavljao bi 4 paralelna prijelaza. Kodni dobitak je u ovom slucaju reduciran na 3.98 dB. Slijedeci dodani nekodirani bit uz 64-QAM konstelaciju daje asimptotski kodni dobitak od 3.77 dB, itd. Ovo opadanje kodnog dobitka se moce i predvidjeti, jer dodavanjem nekodiranih digita opada razina unesene redundancije. 13.6 TCM kodovi s nelinearnim konvolucijskim kodiranjem U primjeru 13.3. i pripadnoj kodnoj rešeci na slici 13.7a uoceno je da 8-PSK trellis kôd sa 4 stanja nije osjetljiv na faznu rotaciju od 180°. Bilo bi poceljno, zbog problema sinkro-nizacije, da je sistem neosjetljiv na sve fazne rotacije koje su cjelobrojni umnocak minimalnog faznog pomaka u konstelaciji (potpuna fazna simetrija), tako da se s jedne strane osigura što je moguce brca resinkronizacija nakon gubitka sinkronizma, a da se s druge strane osigura dekodiranje tocne odaslane informacije i uz tako "pogrešno" uspostavljeni sinkronizam. Ovaj posljednji zahtjev je mecutim standardan problem koji se moce elegantno riješiti uporabom diferencijalnog kodiranja. Rješenje prvoga problema ponuceno je u /6/, gdje je predloceno trellis kôdiranje koje je simetricno s obzirom na fazne rotacije od 90°. Ovo rješenje je zasnovano na uvocenju nelinearnih elemenata u konvolucijski koder. Prva od standardnih primjena ovih kodova je vezana uz prijenos podataka brzinom 9600 bit/s preko dvocicne komutirane telefonske linije uz brzinu signalizacije od 2400 impulsa/s (CCITT preporuka V.32 /9/). PRIMJER 13.6: Trellis kôd za modeme V.32
Sl. 13.17a Trellis koder u V.32 koristi nelinearni konvolucijski (3,2) koder koji sadrci dva mnocaca (modul 2)
Slika 13.17a ilustrira uporabu nelinearnoga konvolucijskog kodera za dvocicni prijenos podataka
brzinom 9600 bit/s preko birane telefonske linije u skladu s predlocenim rješenjem u /6/ koje je ukljuceno u standard CCITT V.32. Od 4 informacijska digita na ulazu u trellis koder, dva digita su nekodirana, tako da se kodna rešetka sastoji od 8 stanja. Kodna rešetka je analogna onoj na slici 13.15, uz dodatak da svaka od linija prijelaza predstavlja 4 paralelna prijelaza, odnosno predstavlja 4
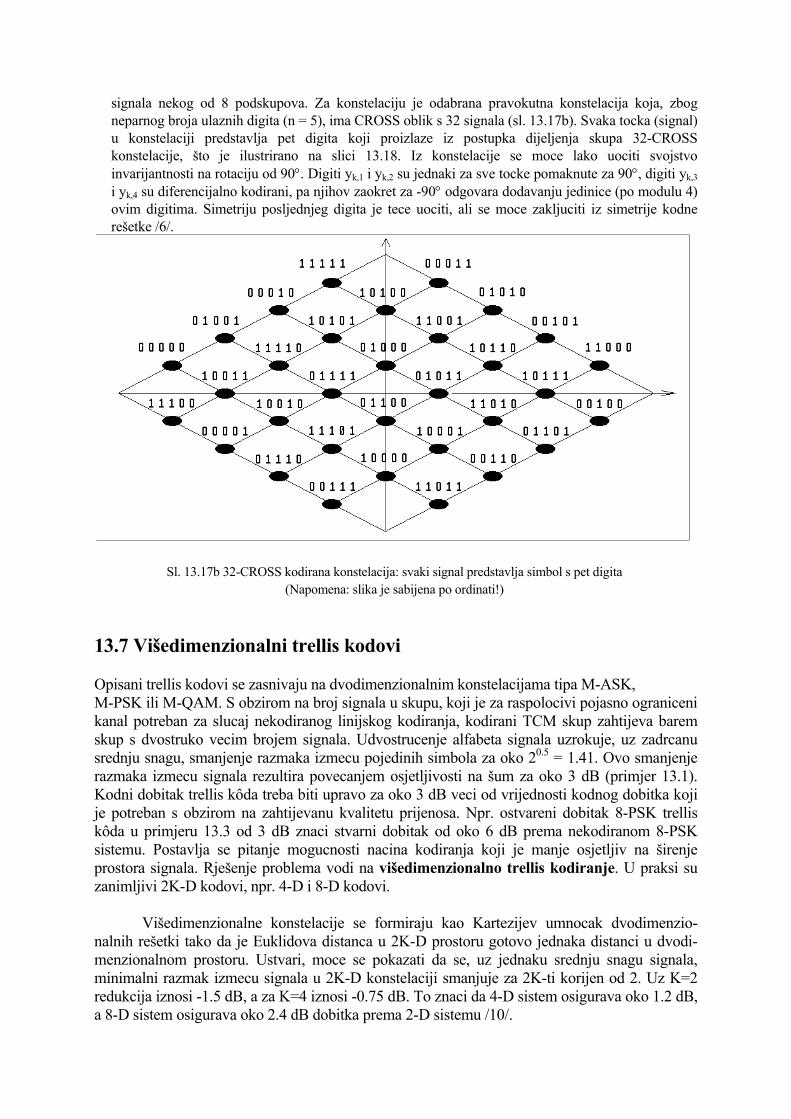
signala nekog od 8 podskupova. Za konstelaciju je odabrana pravokutna konstelacija koja, zbog neparnog broja ulaznih digita (n = 5), ima CROSS oblik s 32 signala (sl. 13.17b). Svaka tocka (signal) u konstelaciji predstavlja pet digita koji proizlaze iz postupka dijeljenja skupa 32-CROSS konstelacije, što je ilustrirano na slici 13.18. Iz konstelacije se moce lako uociti svojstvo invarijantnosti na rotaciju od 90°. Digiti yk,1 i yk,2 su jednaki za sve tocke pomaknute za 90°, digiti yk,3 i yk,4 su diferencijalno kodirani, pa njihov zaokret za -90° odgovara dodavanju jedinice (po modulu 4) ovim digitima. Simetriju posljednjeg digita je tece uociti, ali se moce zakljuciti iz simetrije kodne rešetke /6/.
Sl. 13.17b 32-CROSS kodirana konstelacija: svaki signal predstavlja simbol s pet digita (Napomena: slika je sabijena po ordinati!) 13.7 Višedimenzionalni trellis kodovi Opisani trellis kodovi se zasnivaju na dvodimenzionalnim konstelacijama tipa M-ASK, M-PSK ili M-QAM. S obzirom na broj signala u skupu, koji je za raspolocivi pojasno ograniceni kanal potreban za slucaj nekodiranog linijskog kodiranja, kodirani TCM skup zahtijeva barem skup s dvostruko vecim brojem signala. Udvostrucenje alfabeta signala uzrokuje, uz zadrcanu srednju snagu, smanjenje razmaka izmecu pojedinih simbola za oko 20.5 = 1.41. Ovo smanjenje razmaka izmecu signala rezultira povecanjem osjetljivosti na šum za oko 3 dB (primjer 13.1). Kodni dobitak trellis kôda treba biti upravo za oko 3 dB veci od vrijednosti kodnog dobitka koji je potreban s obzirom na zahtijevanu kvalitetu prijenosa. Npr. ostvareni dobitak 8-PSK trellis kôda u primjeru 13.3 od 3 dB znaci stvarni dobitak od oko 6 dB prema nekodiranom 8-PSK sistemu. Postavlja se pitanje mogucnosti nacina kodiranja koji je manje osjetljiv na širenje prostora signala. Rješenje problema vodi na višedimenzionalno trellis kodiranje. U praksi su zanimljivi 2K-D kodovi, npr. 4-D i 8-D kodovi. Višedimenzionalne konstelacije se formiraju kao Kartezijev umnocak dvodimenzio-nalnih rešetki tako da je Euklidova distanca u 2K-D prostoru gotovo jednaka distanci u dvodi-menzionalnom prostoru. Ustvari, moce se pokazati da se, uz jednaku srednju snagu signala, minimalni razmak izmecu signala u 2K-D konstelaciji smanjuje za 2K-ti korijen od 2. Uz K=2 redukcija iznosi -1.5 dB, a za K=4 iznosi -0.75 dB. To znaci da 4-D sistem osigurava oko 1.2 dB, a 8-D sistem osigurava oko 2.4 dB dobitka prema 2-D sistemu /10/.
Kod standardnih QAM shema, signal unutar svakog intervala signalizacije odrecen je sa n digita od kojih po n/2 definiraju komponentu u fazi i kvadraturnu komponentu. Kod 2K-D dimenzionalnih QAM shema, K⋅n digita definira signal u K sukcesivnih intervala signalizacije, što znaci opet po n/2 digita po svakoj dimenziji. Dakle, dok standardna 2-D QAM tehnika modulacije modulira amplitudno kofaznu i kvadraturnu komponentu nosioca, 4-D QAM tehnika modulira dva sukcesivna para kofaznih i kvadraturnih komponenti. Npr. standardni 16-QAM sadrci 16 signala u skupu, a 4-D 16-QAM sadrci ukupno 16 x 16 = 256 signala u cetverodimenzionalnom prostoru. Oba sistema imaju 2 bita/dimenziji. PRIMJER 13.7: Srednja snaga 4-D kodiranog sistema Neka je 4-dimenzionalni simbol:
Ako su svi simboli jednako vjerojatni i neovisni, srednja snaga odgovara dvostrukoj snazi 2-D 16-QAM konstelacije:
pa Psr za 4-D 16-QAM konstelaciju iznosi 20. Ako se sada formira 4-D prostor s dvostrukim brojem simbola, tj. 512, tako da se pridodaju simboli [±5,
±1, ±1, ±1] i sve njegove permutacije (ukupno 64 mogucnosti), te simboli [±5, ±3, ±1, ±1] i sve njegove permutacije (ukupno 192 mogucnosti), dodano je ukupno 256 novih simbola. Prosjecna snaga za ovu konstelaciju sa 512 signala iznosi 27, što odgovara povecanju od samo 1.3 dB prema 256-konstelaciji.
Slika 13.19 ilustrira opcu shemu 4-D trellis kodera sa 8 stanja u rešeci i konstelacijom od 512 simbola. Svaki simbol predstavlja 9 digita (29 = 512). Tri ulazna digita su kodirana u konvolucijskom (m1+1,m1) koderu (23 = 8 broj stanja) tako da su na ulazu u linijski koder 4 kodirana digita i 5 nekodiranih digita. Kao što se vidi, ovaj trellis koder je prikladan za kodiranje ulaznih okteta (m = 8). Izlaz iz 4-D trellis kodera je 4-dimenzionalni simbol koji se odašilje kao dva dvodimenzionalna simbola. Ustvari, zadatak kodera unutar predajnika je da u registar prihvati 8 dolaznih bitova iz izvora, te da na osnovi tablice za pretvaranje u ROM-u, generira i pošalje u kanal par simbola Ak, Ak+1. Simbol Ak generira QAM signal u tekucem intervalu, a simbol Ak+1 generira QAM signal u slijedecem intervalu. Realizirani asimptotski dobitak za ovaj tip kodera je oko 4.7 dB /11/, što odgovara poboljšanju za oko 0.7 dB prema 2-D rješenju s 4 bita/simbol.
[ ]16 - QAM1 = 4 ( 2 + 2 10 + 18 ) = 10P 16
•
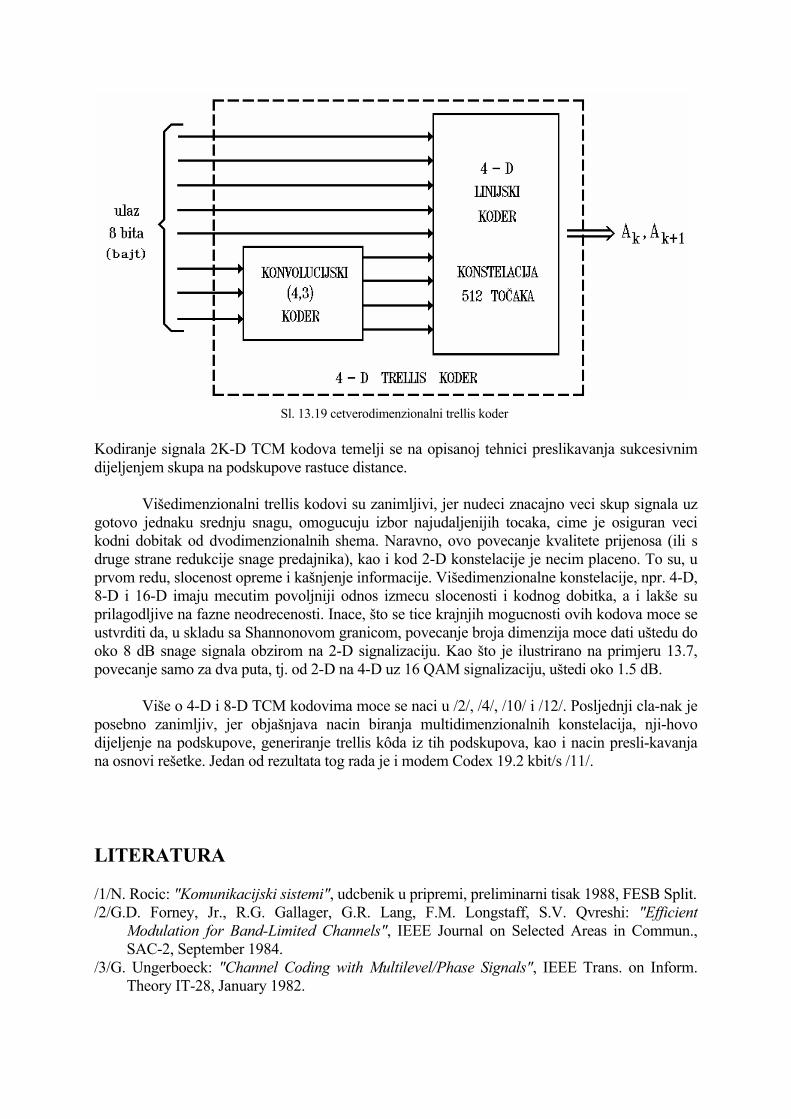
Sl. 13.19 cetverodimenzionalni trellis koder Kodiranje signala 2K-D TCM kodova temelji se na opisanoj tehnici preslikavanja sukcesivnim dijeljenjem skupa na podskupove rastuce distance. Višedimenzionalni trellis kodovi su zanimljivi, jer nudeci znacajno veci skup signala uz gotovo jednaku srednju snagu, omogucuju izbor najudaljenijih tocaka, cime je osiguran veci kodni dobitak od dvodimenzionalnih shema. Naravno, ovo povecanje kvalitete prijenosa (ili s druge strane redukcije snage predajnika), kao i kod 2-D konstelacije je necim placeno. To su, u prvom redu, slocenost opreme i kašnjenje informacije. Višedimenzionalne konstelacije, npr. 4-D, 8-D i 16-D imaju mecutim povoljniji odnos izmecu slocenosti i kodnog dobitka, a i lakše su prilagodljive na fazne neodrecenosti. Inace, što se tice krajnjih mogucnosti ovih kodova moce se ustvrditi da, u skladu sa Shannonovom granicom, povecanje broja dimenzija moce dati uštedu do oko 8 dB snage signala obzirom na 2-D signalizaciju. Kao što je ilustrirano na primjeru 13.7, povecanje samo za dva puta, tj. od 2-D na 4-D uz 16 QAM signalizaciju, uštedi oko 1.5 dB. Više o 4-D i 8-D TCM kodovima moce se naci u /2/, /4/, /10/ i /12/. Posljednji cla-nak je posebno zanimljiv, jer objašnjava nacin biranja multidimenzionalnih konstelacija, nji-hovo dijeljenje na podskupove, generiranje trellis kôda iz tih podskupova, kao i nacin presli-kavanja na osnovi rešetke. Jedan od rezultata tog rada je i modem Codex 19.2 kbit/s /11/. LITERATURA /1/N. Rocic: "Komunikacijski sistemi", udcbenik u pripremi, preliminarni tisak 1988, FESB Split. /2/G.D. Forney, Jr., R.G. Gallager, G.R. Lang, F.M. Longstaff, S.V. Qvreshi: "Efficient
Modulation for Band-Limited Channels", IEEE Journal on Selected Areas in Commun., SAC-2, September 1984.
/3/G. Ungerboeck: "Channel Coding with Multilevel/Phase Signals", IEEE Trans. on Inform. Theory IT-28, January 1982.
/4/G. Ungerboeck: "Trellis - Coded Modulation with Redundant Signal Sets Part I: Introdustion", IEEE Commun. Mag. February 1987, (5 - 11).
/5/S. Benedetto, E. Biglieri, V. Castellani: "Digital Transmission Theory", Prentice-Hall int., Ed. N J, 1987.
/6/G. Ungerboeck: "Trellis - Coded Modulation with Redundant Signal Sets Part II: State of the Art", IEEE Commun. Mag., February 1987, (12 - 21).
/7/A.R. Calderbank: "New Trellis Codes Based on Lattices and Cosets", IEEE Trans. on Inform. Theory IT-33, March 1987, (177 - 195).
/8/G.D. Forney, Jr.: "Coset Codes - Part I, Part II", IEEE Trans. on Inform. Theory IT-34, September 1988, (1123 - 1187).
/9/CCITT Recomm. V.32: "A family of 2-wire, duplex modems operating at data signalling rates of up to 9600 bit/s for use on the general switched telephone network and on leased telephone - type circuits", Malaga - Torremolinos, 1984, Melbourne 1988, (234 - 251).
/10/A. Gersho, V.B. Lawrence: "Multidimensional Signal Constellations for Voiceband Data Transmission", IEEE SAC-2, September 1984, (687 - 702).
/11/A.R. Calderbank, N.J.A. Sloane: "Four-Dimensional Modulation With on Eight-State Trellis Code", AT&T Technical Journal 64(5), May-June 1985.
/12/L.F. Wei: "Rotationally Invariant Convolutional Channel Coding with Expanded Signal Space -Part I: 180°, Part II: Nonlinear Codes", IEEE J. Selected Areas in Commun., vol. SAC-2, September 1984, (659 -686).
/13/K. Pahlavan, J.L. Holsinger: "Voice-Band Data Communication Modems - A Historical Review: 1919 - 1988", IEEE Commun. Mag., January 1988, vol. 26, (16 - 27).
KONTROLA GREŠAKA TEHNIKOM PONAVLJANJA PRIJENOSA (ARQ SUSTAVI) 15.1 Uvod U drugome dijelu knjige analizirani su redundantni blok- i konvolucijski kodovi. Ovi kodovi omogućavaju kontrolu grešaka nastalih tijekom prijenosa, pohranjivanja ili reprodukcije digitalnih informacija, bilo korištenjem samo detekcije ili pak korištenjem i detekcije i korekcije grešaka. Sposobnost kôda da kontrolira greške određena je prije svega iznosom unesene redundancije. Uz određeni iznos redundancije neki (n,m) linearni kôd osigurava detekciju i korekciju odgovarajučeg broja grešaka koji je određen Hammingovom distancom kôda d. Broj grešaka koje se mogu detektirati je d - 1, a broj grešaka koje se mogu korigirati je najviše (d – 1)/2, što međutim ovisi i o složenosti tehnike dekodiranja. Standardni Hammingov (7,4) kôd može detektirati barem 2 greške po kodnoj riječi, a istodobno može korigirati samo jednu grešku i to uz značajno složeniji dekoder. Naravno, postavlja se pitanje kako uopće osmisliti i iskoristiti mogućnost detekcije grešaka. Sama činjenica da je nastala greška u prijenosu može biti iskorištena ili samo u svrhu nadgledanja kvalitete prijenosa (monitoring) i eventualno alarmiranja kad greška premaši dopušteni prag, ili pak da se pošalje zahtjev za ponovnim prijenosom pogrešne poruke.
Pored toga, postoji još jedna, ustvari najpoželjnija ali ne uvijek i primjenjiva tehnika kontrole grešaka, koja se temelji na prevenciji pojave grešaka. Prevencija grešaka je dobrim dijelom prisutna u trellis (TCM) kodovima, a na razini mreže prisutna je pri adaptivnom upravljanju prometom (rutiranjem) kako bi se spriječila zagušenja. S obzirom na spomenute tehnike kontrole grešaka mogu se, dakle, izdvojiti sljedece tipove sustava s kontrolom grešaka: -nadgledanje grešaka i alarmiranje, -automatsko ponavljanje prijenosa po zahtjevu - ARQ sustavi, -detekcija i korekcija grešaka - FEC sustavi, -prevencija grešaka. Koji će od navedenih tipova biti realiziran ovisi o primjeni i složenosti sistema. Za neki simpleksni tip komunikacijskog sistema za koji tocnost i kašnjenje nisu kriticni, tehnika nadgledanja i eventualno alarmiranja, bit ce opravdano rješenje. Poludupleksni sistemi i dupleksni sistemi nice slocenosti su tipicni za primjenu ARQ shema. Npr. ARQ se obicno koristi kod racunarskih komunikacija jer je prisutna obostrana komunikacija i na raspolaganju su dovoljno velike privremene memorije potrebne za retransmisiju. Takocer, u ISDN mreci ARQ sistem je prihvatljiviji, jer bi FEC sistem zahtijevao previše redundancije u mreci. U spomenutim mrecama, detekcija i ponavljanje prijenosa definirani su prije svega unutar protokola drugoga sloja (sloj veze) preko HDLC protokola (poglavlja 16 i 17). FEC sistemi su zanimljiviji u simpleksnim sistemima kao što su svemirske komunikacije, digitalna audio i video-tehnika i slicno. FEC sistemi opcenito zahtijevaju slocenija rješenja što je veci zahtjev za tocnošcu prijenosa informacije. Naime, za dani (n,m) kôd, veca je vjerojatnost greške pri postupku korekcije, nego pri postupku detekcije grešaka, pa je za visok stupanj pouzdanosti potrebno korigirati više grešaka, ukljucujuci i one slucajnog i one praskava karaktera. Treba naglasiti osnovnu razliku izmecu ARQ i FEC sustava. Ako se uzme da je u oba sistema uvijek isti iznos redundancije, ARQ sustav će tu redundanciju iskoristiti bez obzira na teže uvjete prijenosa od predviđenih. Cijena toga je povećano kašnjenje informacije. S druge strane, FEC sustav će u slučaju većeg broja grešaka od predviđenog biti nemoćan. Štoviše, u ovakvim situacijama sustav s korekcijom grešaka može pogoršati kvalitetu u odnosu na nekodirani prijenos. Međutim, ARQ sustav iako očito zahvalan za kanale sa smetnjama, nije uvijek primjenljiv. Neke usluge jednostavno ne podnose ponavljanje, a s druge strane nisu toliko osjetljive na greške (npr. govor, slike, faksimil i TV). Prijenos podataka je osjetljiv na greške, i ćesto dopušta ponavljanja odnosno kašnjenje. PRIMJER 15.1: Komunikacija podatcima u pomorstvu Pomorske komunikacije koriste simpleksne ili dupleksne sisteme za prijenos tekstovnih poruka.
Tipicno, obalne radiostanice u odrecenim vremenskim intervalima emitiraju pomorske obavijesti i meteorološka izvješca koje brodski prijemnik ispisuje na papirnu vrpcu. Ovi komunikacijski sistemi rade u tzv. A (ARQ) ili B (FEC) modu. B ili "broadcast" môd je uobicajen i on osigurava korekciju pogrešne poruke time što predajnik odašilje svaki simbol dva puta uz odgovarajuce vremensko kašnjenje. Naravno, i pored toga primljena poruka može biti pogrešna, pa ako npr. postoji više od 10 pogrešnih simbola (70 bita) unutar jedne poruke, prijemnik uspostavlja stanje "alarma", tj. poruka se ne tiska nego prijemnik ceka slijedecu emisiju iste poruke.
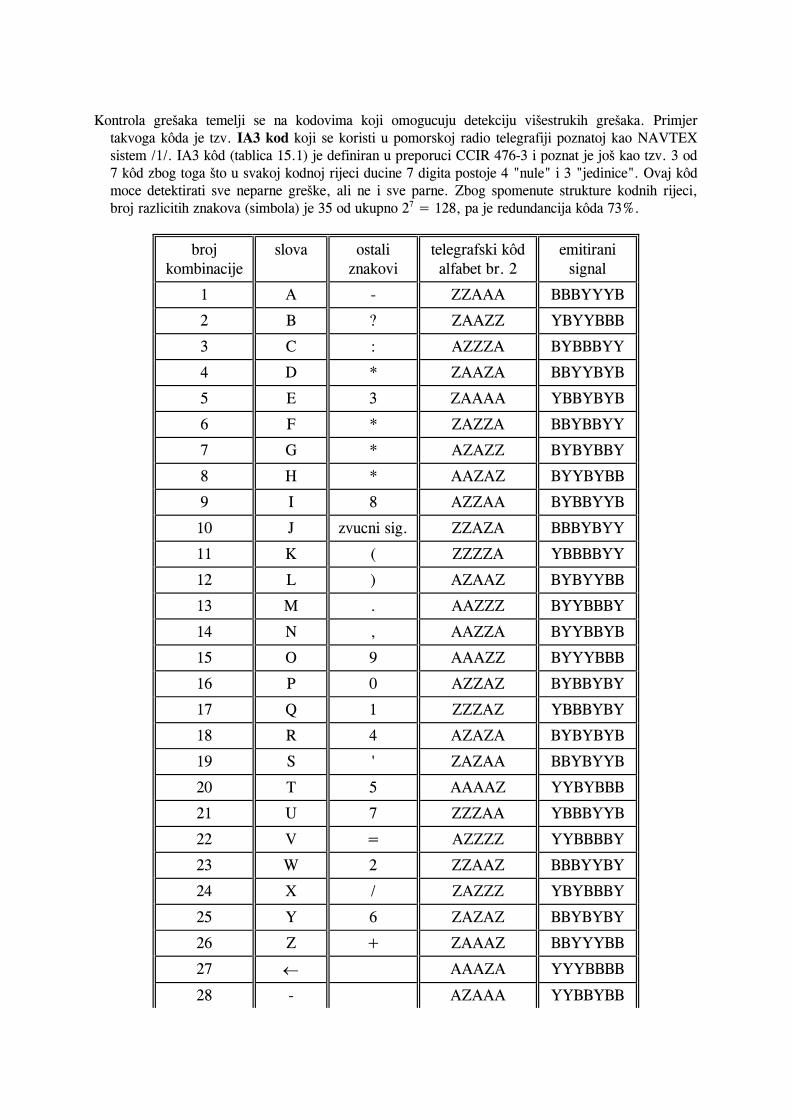
Kontrola grešaka temelji se na kodovima koji omogucuju detekciju višestrukih grešaka. Primjer
takvoga kôda je tzv. IA3 kod koji se koristi u pomorskoj radio telegrafiji poznatoj kao NAVTEX sistem /1/. IA3 kôd (tablica 15.1) je definiran u preporuci CCIR 476-3 i poznat je još kao tzv. 3 od 7 kôd zbog toga što u svakoj kodnoj rijeci ducine 7 digita postoje 4 "nule" i 3 "jedinice". Ovaj kôd moce detektirati sve neparne greške, ali ne i sve parne. Zbog spomenute strukture kodnih rijeci, broj razlicitih znakova (simbola) je 35 od ukupno 27 = 128, pa je redundancija kôda 73%.
broj kombinacije
slova ostali znakovi
telegrafski kôd alfabet br. 2
emitirani signal
1 A - ZZAAA BBBYYYB
2 B ? ZAAZZ YBYYBBB
3 C : AZZZA BYBBBYY
4 D * ZAAZA BBYYBYB
5 E 3 ZAAAA YBBYBYB
6 F * ZAZZA BBYBBYY
7 G * AZAZZ BYBYBBY
8 H * AAZAZ BYYBYBB
9 I 8 AZZAA BYBBYYB
10 J zvucni sig. ZZAZA BBBYBYY
11 K ( ZZZZA YBBBBYY
12 L ) AZAAZ BYBYYBB
13 M . AAZZZ BYYBBBY
14 N , AAZZA BYYBBYB
15 O 9 AAAZZ BYYYBBB
16 P 0 AZZAZ BYBBYBY
17 Q 1 ZZZAZ YBBBYBY
18 R 4 AZAZA BYBYBYB
19 S ' ZAZAA BBYBYYB
20 T 5 AAAAZ YYBYBBB
21 U 7 ZZZAA YBBBYYB
22 V = AZZZZ YYBBBBY
23 W 2 ZZAAZ BBBYYBY
24 X / ZAZZZ YBYBBBY
25 Y 6 ZAZAZ BBYBYBY
26 Z + ZAAAZ BBYYYBB
27 ← AAAZA YYYBBBB
28 - AZAAA YYBBYBB
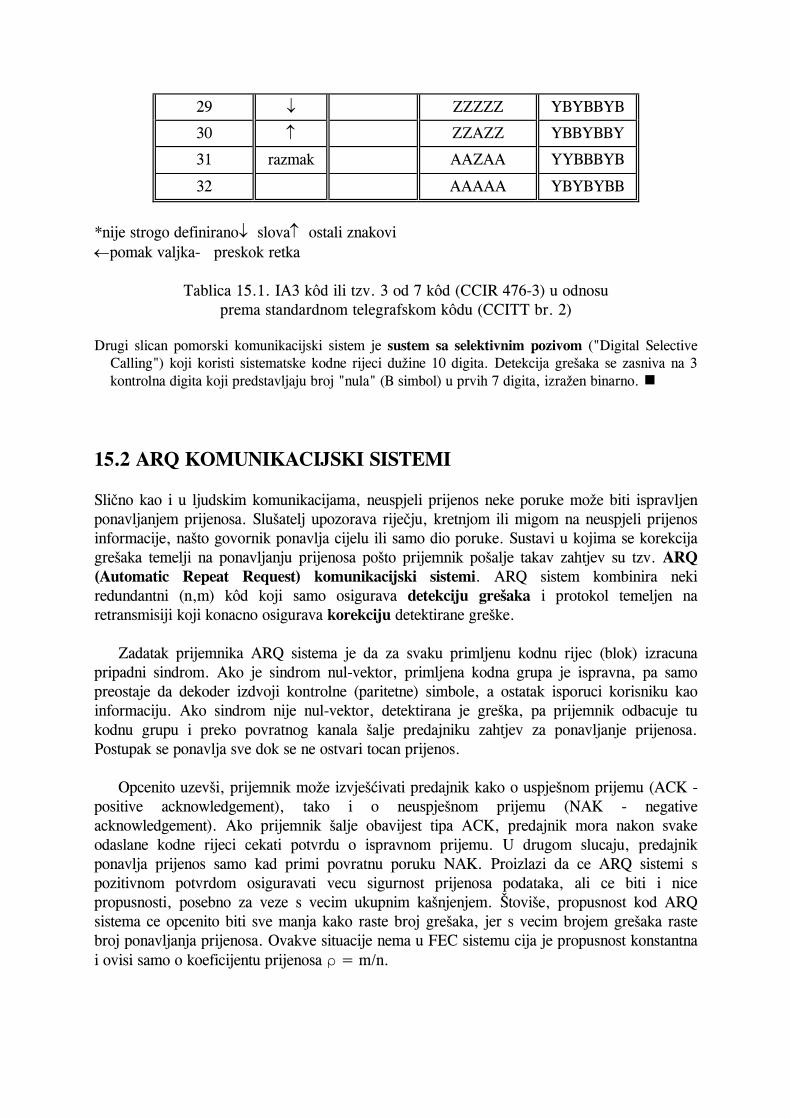
29 ↓ ZZZZZ YBYBBYB
30 ↑ ZZAZZ YBBYBBY
31 razmak AAZAA YYBBBYB
32 AAAAA YBYBYBB
*nije strogo definirano↓ slova↑ ostali znakovi ←pomak valjka- preskok retka
Tablica 15.1. IA3 kôd ili tzv. 3 od 7 kôd (CCIR 476-3) u odnosu prema standardnom telegrafskom kôdu (CCITT br. 2)
Drugi slican pomorski komunikacijski sistem je sustem sa selektivnim pozivom ("Digital Selective
Calling") koji koristi sistematske kodne rijeci dužine 10 digita. Detekcija grešaka se zasniva na 3 kontrolna digita koji predstavljaju broj "nula" (B simbol) u prvih 7 digita, izražen binarno.
15.2 ARQ KOMUNIKACIJSKI SISTEMI Slično kao i u ljudskim komunikacijama, neuspjeli prijenos neke poruke može biti ispravljen ponavljanjem prijenosa. Slušatelj upozorava riječju, kretnjom ili migom na neuspjeli prijenos informacije, našto govornik ponavlja cijelu ili samo dio poruke. Sustavi u kojima se korekcija grešaka temelji na ponavljanju prijenosa pošto prijemnik pošalje takav zahtjev su tzv. ARQ (Automatic Repeat Request) komunikacijski sistemi. ARQ sistem kombinira neki redundantni (n,m) kôd koji samo osigurava detekciju grešaka i protokol temeljen na retransmisiji koji konacno osigurava korekciju detektirane greške. Zadatak prijemnika ARQ sistema je da za svaku primljenu kodnu rijec (blok) izracuna pripadni sindrom. Ako je sindrom nul-vektor, primljena kodna grupa je ispravna, pa samo preostaje da dekoder izdvoji kontrolne (paritetne) simbole, a ostatak isporuci korisniku kao informaciju. Ako sindrom nije nul-vektor, detektirana je greška, pa prijemnik odbacuje tu kodnu grupu i preko povratnog kanala šalje predajniku zahtjev za ponavljanje prijenosa. Postupak se ponavlja sve dok se ne ostvari tocan prijenos. Opcenito uzevši, prijemnik može izvješćivati predajnik kako o uspješnom prijemu (ACK - positive acknowledgement), tako i o neuspješnom prijemu (NAK - negative acknowledgement). Ako prijemnik šalje obavijest tipa ACK, predajnik mora nakon svake odaslane kodne rijeci cekati potvrdu o ispravnom prijemu. U drugom slucaju, predajnik ponavlja prijenos samo kad primi povratnu poruku NAK. Proizlazi da ce ARQ sistemi s pozitivnom potvrdom osiguravati vecu sigurnost prijenosa podataka, ali ce biti i nice propusnosti, posebno za veze s vecim ukupnim kašnjenjem. Štoviše, propusnost kod ARQ sistema ce opcenito biti sve manja kako raste broj grešaka, jer s vecim brojem grešaka raste broj ponavljanja prijenosa. Ovakve situacije nema u FEC sistemu cija je propusnost konstantna i ovisi samo o koeficijentu prijenosa ρ = m/n.
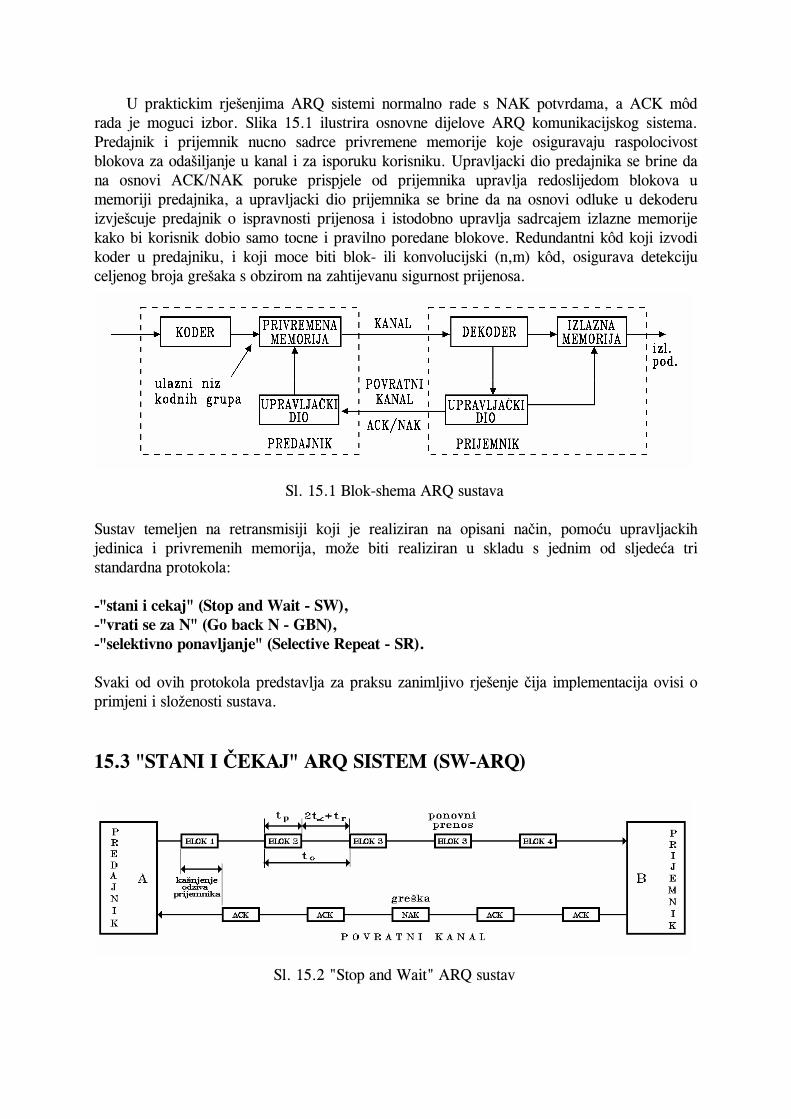
U praktickim rješenjima ARQ sistemi normalno rade s NAK potvrdama, a ACK môd rada je moguci izbor. Slika 15.1 ilustrira osnovne dijelove ARQ komunikacijskog sistema. Predajnik i prijemnik nucno sadrce privremene memorije koje osiguravaju raspolocivost blokova za odašiljanje u kanal i za isporuku korisniku. Upravljacki dio predajnika se brine da na osnovi ACK/NAK poruke prispjele od prijemnika upravlja redoslijedom blokova u memoriji predajnika, a upravljacki dio prijemnika se brine da na osnovi odluke u dekoderu izvješcuje predajnik o ispravnosti prijenosa i istodobno upravlja sadrcajem izlazne memorije kako bi korisnik dobio samo tocne i pravilno poredane blokove. Redundantni kôd koji izvodi koder u predajniku, i koji moce biti blok- ili konvolucijski (n,m) kôd, osigurava detekciju celjenog broja grešaka s obzirom na zahtijevanu sigurnost prijenosa.
Sl. 15.1 Blok-shema ARQ sustava Sustav temeljen na retransmisiji koji je realiziran na opisani način, pomoću upravljackih jedinica i privremenih memorija, može biti realiziran u skladu s jednim od sljedeća tri standardna protokola: -"stani i cekaj" (Stop and Wait - SW), -"vrati se za N" (Go back N - GBN), -"selektivno ponavljanje" (Selective Repeat - SR). Svaki od ovih protokola predstavlja za praksu zanimljivo rješenje čija implementacija ovisi o primjeni i složenosti sustava. 15.3 "STANI I ČEKAJ" ARQ SISTEM (SW-ARQ)
Sl. 15.2 "Stop and Wait" ARQ sustav
Ovo je najjednostavnija shema komunikacijskog sistema s kontrolom grešaka temeljena na ponavljanju prijenosa i prikladna je za poludupleksne prijenose gdje terminali odašilju alternativno jedan za drugim. Nakon svake odaslane kodne rijeci (bloka) predajnik prestaje s prijenosom i ceka odziv prijemnika (slika 15.2). Privremena memorija predajnika cuva taj blok sve dok upravljacki dio predajnika, na osnovi odziva ACK/NAK, ne definira da li se ta kodna grupa ponovno šalje (primljen NAK) ili se odbacuje i šalje slijedeci blok (primljen ACK). Vrijeme izmecu sukcesivnih blokova ukljucuje slijedece utjecaje: -kašnjenje u krajnjoj opremi izazvano uglavnom vremenskom zadrškom u odzivu izmecu
zahtjeva za odašiljanjem u DTE urecaju (RTS) i odziva DTE urecaja sa DSR (spreman za odašiljanje). Osim toga adaptivni ekvalizatori i eho poništavaci u modemima zahtijevaju odreceno vrijeme "treninga" adaptivnih algoritama. Dakle, zbog obrade signala u predajniku i prijemniku, te sigurnosnog kodiranja i dekodiranja, javlja se odreceno kašnjenje. Ukupna kašnjenja u krajnjoj opremi dosecu red od 100 ms.
-kašnjenje zbog propagacije kroz kanal. Moce se uzeti da je brzina prijenosa preko
nepupiniziranog višecilnog kabela oko 0.02 ms/km, a za koaksijalni kabel oko 5 μs/km, dok je kod radio veza oko 3.3 μs/km. Za neku satelitsku vezu preko geostacionarne putanje, ukupno kašnjenje dosece i 700 ms. Ovo vrijeme moce biti vece kad se uzme u obzir ukljucivanje i iskljucivanje prigušivaca jeke.
-kašnjenje u povratnom kanalu. Brzina povratnog kanala kod modemskih veza je nica i
standardno iznosi 75 bit/s. Ako je povratna poruka (ACK/NAK) ducine 10 bita, trajanje kodne grupe iznosi preko 100 ms.
Ukupan utjecaj "mrtvog" vremena na iskorištenje kanala bit ce to veci što je manje trajanje blokova. S druge strane, kod ducih blokova veca je vjerojatnost greške, što znaci cešce ponavljanje prijenosa, a time i manje iskorištenje sistema. Osim toga, u brojnim primjenama nije ni moguce formirati duge blokove zbog drugih ogranicenja. Da se dobije kvantitativni uvid u iskorištenje ARQ sistema, definirajmo propusnost kanala kao:
Neka, kao na slici 15.2, vrijedi: tp-vrijeme trajanja odašiljanja paketa, 2⋅tα-ukupno kašnjenje propagacije ("round-trip delay"), tr-vrijeme obrade u prijemniku i trajanje ACK/NAK bloka, pa je minimalno vrijeme između sukcesivnih okvira:
prosjecan broj uspjesno prenesenih informacijskihbitova u jedinici vremenapropusnost ( ) =
ukupan broj prenesenih bitova u jedinici vremenaη

Nadalje, neka samo terminal A šalje informacijske blokove prema B, a B šalje samo potvrdu o ispravnosti prijenosa ACK/NAK, te neka je predajnik terminala A uvijek spreman za odašiljanje bloka i bez ogranicenja glede broja ponavljanja. U ovom slucaju moce se govoriti o gornjoj granici za propusnost SW-ARQ sistema, jer se u vremenu t0 ne moce odaslati više od jednog bloka podataka. Ako se uzme da je vjerojatnost greške unutar bloka od A prema B jednaka p, a vjerojatnost greške u povratnom kanalu zanemariva (što je moguce uzeti jer su ACK/NAK paketi znacajno kraći od paketa podataka), moce se definirati srednje vrijeme potrebno za tocan prijenos paketa:
Proizlazi da srednje vrijeme odašiljanja jednog paketa kod SW-ARQ sistema raste s faktorom 1/(1-p). Alternativno, moce se definirati prosjecan broj digita koje predajnik mora odaslati po svakom tocno prenesenom paketu:
gdje je n broj digita po paketu (kodnoj rijeci), T je vrijeme odašiljanja jednog digita, tj. n⋅T = tp, a (t0 - tp) predstavlja vrijeme izmecu dva sukcesivna paketa (tzv."mrtvo" vrijeme). Maksimalna propusnost izracena preko broja isporucenih paketa u sekundi je reciprocna vrijednost od TSW, tj.:
gdje je parametar a = t0/tp ≥ 1, tako da (15.4) predstavlja maksimalnu propusnost u ovisnosti o trajanju paketa tp. Stvarni broj paketa u sekundi je λ, pa je normalizirana propusnost:
Relacija (15.4) eksplicitno izracava ovisnost propusnosti SW-ARQ protokola o vjerojatnosti greške p i o omjeru vremena izmecu okvira i trajanja okvira. Ustvari, buduci da je paket ducine n digita, što odgovara ducini kodne rijeci (n,m) kôda, propusnost definirana u (15.5) je uz (15.3):
0 p r= + 2 + t t t tα•
k 0
SW 0 0k = 1
t = + ( 1- p ) k = pt tT 1- p
∞
• •∑
0 p
SW
1n + ( - ) t t T = N1 - p
•
maxSW 0 p
1 1- p 1- p = = = a t tT
λ•
pSW1- p= < 1t
aλη • ≤
gdje je ρ = m/n koeficijent prijenosa upotrijebljenog kôda. Kad je kašnjenje odziva prijemnika zanemarivo, vrijeme izmecu sukcesivnih okvira je zanemarivo (tj. 2⋅tα + tr « tp), pa je propusnost:
Mecutim, za komunikacijske sisteme s velikom brzinom prijenosa i velikim ukupnim kašnjenjem, vrijednost (t0 - tp)/n⋅T postaje velika, jer n ne moce biti vrlo velik, što zbog velike vjerojatnosti greške, što zbog drugih ogranicenja u primjenama. Za ovakav slucaj "stani i cekaj" protokol ima nisku propusnost i nije prikladan. PRIMJER 15.2: SW-ARQ za satelitsku vezu Neka je brzina prijenosa preko satelitskog kanala 2 Mbit/s što odgovara standardnoj PCM vezi za 30
govornih kanala. Neka je ukupno kašnjenje veze 600 ms, pa (t0 - tp)/T iznosi 0.3⋅106. Ova vrijednost podijeljena sa n, u skladu s relacijom (15.6), trebala bi biti znacajno manja od 1, kako bi propusnost bila što veca. Ovo bi zahtijevalo da n (ducina bloka) bude reda Mbita. Blok-kôd cije su kodne rijeci ducine 1000000 digita je posve nepraktican za primjenu.
Ako se uzme n = 10000 digita, propusnost ce biti:
pa je sistem neupotrebljiv. Ako bi brzina prijenosa bila niska, npr. 2400 bit/s (QPSK modulacija), vrijednost (t0 - tp)/T bi bila 250, pa uz n = 1000 digita po bloku propusnost poprima vrijednost:
Uz p = 10-5 i m « n, propusnost od 80% moce biti zadovoljavajuca. Ako se uzme da su greške, koje nastaju na pojedinim digitima u kanalu, slucajno i neovisno raspodijeljene, vjerojatnost greške paketa od n digita ce biti:
gdje je pe vjerojatnost greške digita. Uz (15.7), relacija (15.6) postaje:
odnosno:
SW SW
0 p
m m 1 - p 1 - p = = = 1n aN 1 + ( - ) t t n T
ρη • ••
•
SW1 - p = < 1 - p jer je a 1 i < 1
aρ ρη ≈
SW
m( 1- p ) 1n= < 1 + 30 31
η•
SW
m( 1- p ) n= < 0.8
1 + 0.25η
•
n
ep = 1 - ( 1 - p )
n
e SW
( 1 - )p=
aρη •
gdje je c = n - m broj redundantnih digita. Relacija (15.8) ukazuje na ovisnost propusnosti o ducini bloka što nije uocljivo u (15.6). Proizlazi da uz odrecenu vjerojatnost greške po digitu pe propusnost moce biti maksimizirana izborom optimalne velicine n. Za vrlo male pe za koje je n⋅pe « 1, vrijedi:
pa (15.6) postaje:
Optimalna ducina bloka slijedi iz ∂η/∂n = 0, što uz a ≈ 1 daje:
Može se pokazati da je za slucaj praskavih grešaka u kanalu vjerojatnost greške okvira također
proporcionalna ducini okvira /2/ tako da vrijedi p = n⋅pe izuzev što je ovdje pe određena
konstanta proporcionalnosti, a ne vjerojatnost greške digita.
Protokol SW-ARQ je upotrijebljen od IBM unutar BISYNC (Binary Synchronous
Communication) procedure. Adaptivna verzija SW-ARQ temeljena na jednostavnom algoritmu
prilagođavanja dužine bloka n je zanimljiva za primjenu u PC komunikacijama (poglavlje 18).
15.4 "VRATI SE ZA N" (GBN) ARQ PROTOKOL Za razliku od prethodne ARQ sheme, u ovom tipu ARQ sistema predajnik odašilje kodne rijeci, odnosno blokove jedan za drugim, bez cekanja. Pošto upravljacki dio predajnika A dobije NAK poruku, predajnik treba ponovno odaslati N posljednjih blokova. Zadatak prijemnika je da, nakon otkrivene greške, odbaci prethodno primljene N-1 blokove, te da saceka ponovnu isporuku i, ako nema greške, prihvati novoprimljenu grupu kako bi redoslijed isporucenih blokova korisniku bio ispravan. U GBN shemi kanal je kontinuirano aktivan i njegovo iskorištenje iskljucivo ovisi o broju grešaka i o N. To znaci da ce propusnost biti veca od propusnosti SW sheme pogotovu kad vrijeme propagacije tα nije zanemarivo u odnosu prema vremenu prijenosa okvira.
n
e SW
( 1 - )p c = ( 1 - )a n
η
ep = n » 1p
e
SW
1 - n p c = ( 1 - )a n
η•
opte
c = n p
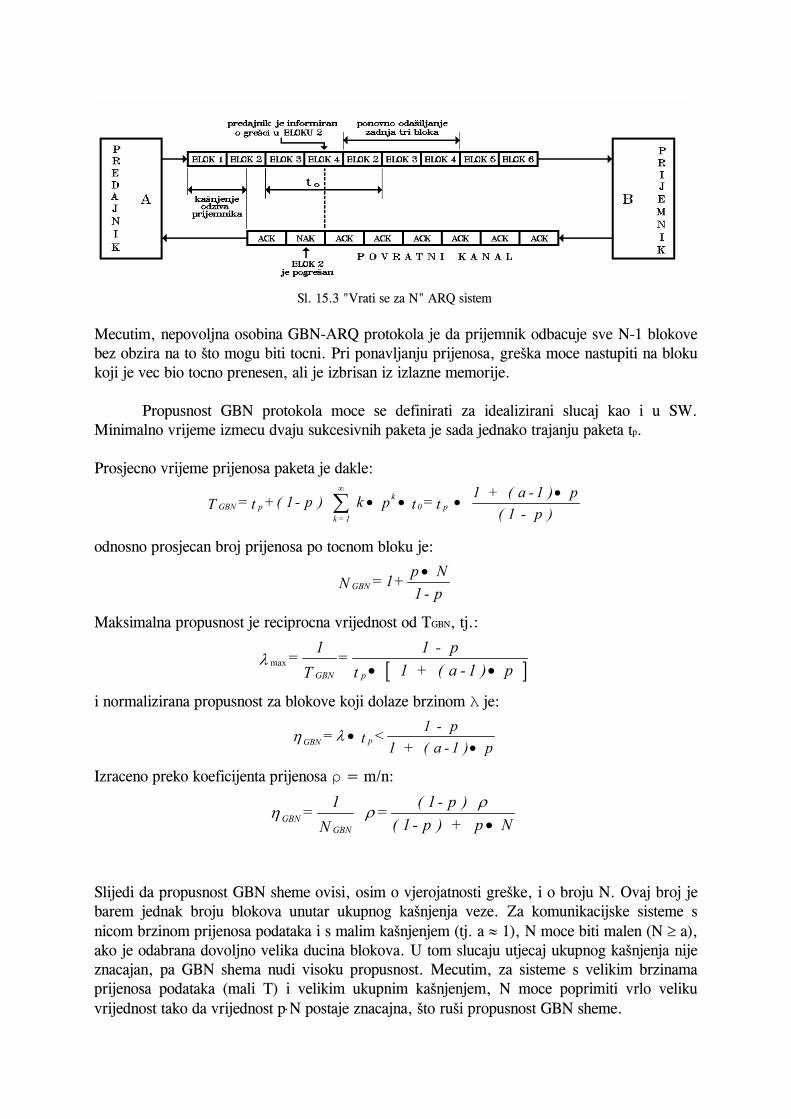
Mecutim, nepovoljna osobina GBN-ARQ protokola je da prijemnik odbacuje sve N-1 blokove bez obzira na to što mogu biti tocni. Pri ponavljanju prijenosa, greška moce nastupiti na bloku koji je vec bio tocno prenesen, ali je izbrisan iz izlazne memorije. Propusnost GBN protokola moce se definirati za idealizirani slucaj kao i u SW. Minimalno vrijeme izmecu dvaju sukcesivnih paketa je sada jednako trajanju paketa tp. Prosjecno vrijeme prijenosa paketa je dakle:
odnosno prosjecan broj prijenosa po tocnom bloku je:
Maksimalna propusnost je reciprocna vrijednost od TGBN, tj.:
i normalizirana propusnost za blokove koji dolaze brzinom λ je:
Izraceno preko koeficijenta prijenosa ρ = m/n:
Slijedi da propusnost GBN sheme ovisi, osim o vjerojatnosti greške, i o broju N. Ovaj broj je barem jednak broju blokova unutar ukupnog kašnjenja veze. Za komunikacijske sisteme s nicom brzinom prijenosa podataka i s malim kašnjenjem (tj. a ≈ 1), N moce biti malen (N ≥ a), ako je odabrana dovoljno velika ducina blokova. U tom slucaju utjecaj ukupnog kašnjenja nije znacajan, pa GBN shema nudi visoku propusnost. Mecutim, za sisteme s velikim brzinama prijenosa podataka (mali T) i velikim ukupnim kašnjenjem, N moce poprimiti vrlo veliku vrijednost tako da vrijednost p⋅N postaje znacajna, što ruši propusnost GBN sheme.
Sl. 15.3 "Vrati se za N" ARQ sistem
k
GBN p 0 pk = 1
1 + ( a - 1 ) p = + ( 1- p ) k = pt t tT ( 1 - p )
∞ •• • •∑
GBNp N = 1 + N1 - p•
[ ]maxGBN p
1 1 - p = = 1 + ( a - 1 ) p tT
λ• •
pGBN1 - p = < t
1 + ( a - 1 ) pλη •
•
GBNGBN
1 ( 1 - p ) = = ( 1 - p ) + p NN
ρρη•
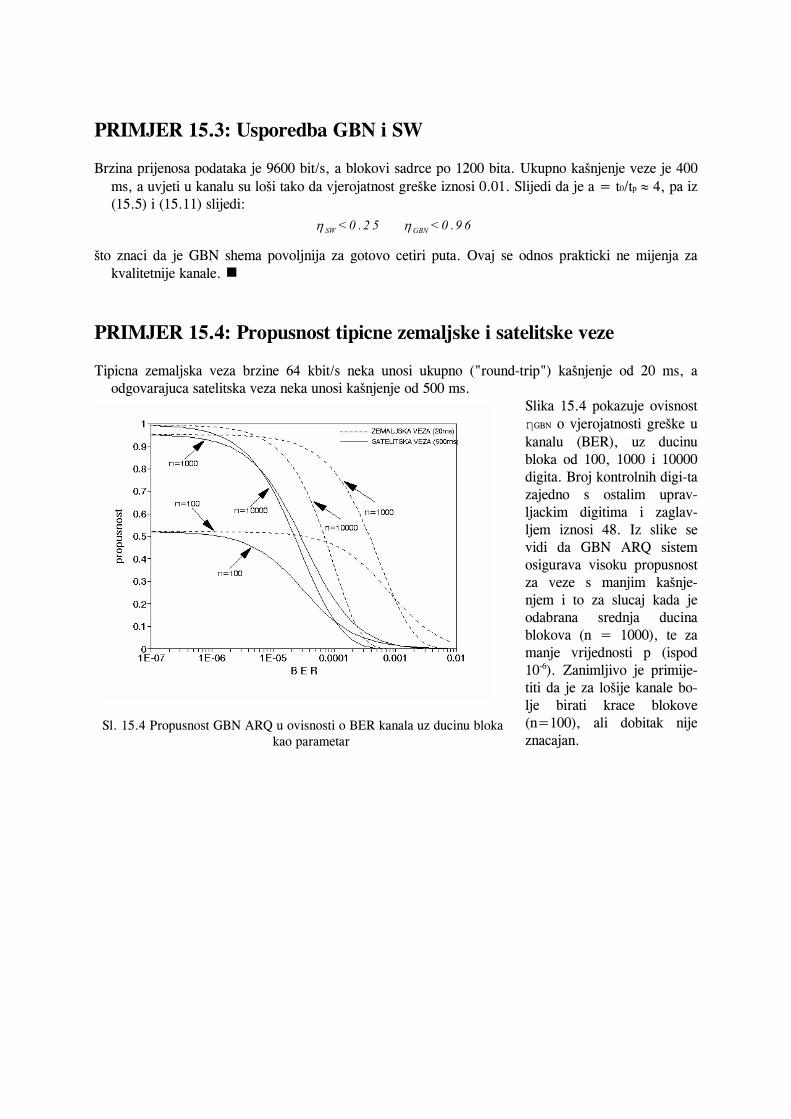
PRIMJER 15.3: Usporedba GBN i SW Brzina prijenosa podataka je 9600 bit/s, a blokovi sadrce po 1200 bita. Ukupno kašnjenje veze je 400
ms, a uvjeti u kanalu su loši tako da vjerojatnost greške iznosi 0.01. Slijedi da je a = t0/tp ≈ 4, pa iz (15.5) i (15.11) slijedi:
što znaci da je GBN shema povoljnija za gotovo cetiri puta. Ovaj se odnos prakticki ne mijenja za kvalitetnije kanale.
PRIMJER 15.4: Propusnost tipicne zemaljske i satelitske veze Tipicna zemaljska veza brzine 64 kbit/s neka unosi ukupno ("round-trip") kašnjenje od 20 ms, a
odgovarajuca satelitska veza neka unosi kašnjenje od 500 ms. Slika 15.4 pokazuje ovisnost ηGBN o vjerojatnosti greške u kanalu (BER), uz ducinu bloka od 100, 1000 i 10000 digita. Broj kontrolnih digi-ta zajedno s ostalim uprav-ljackim digitima i zaglav-ljem iznosi 48. Iz slike se vidi da GBN ARQ sistem osigurava visoku propusnost za veze s manjim kašnje-njem i to za slucaj kada je odabrana srednja ducina blokova (n = 1000), te za manje vrijednosti p (ispod 10-6). Zanimljivo je primije-titi da je za lošije kanale bo-lje birati krace blokove (n=100), ali dobitak nije znacajan.
SW GBN< 0 . 2 5 < 0 . 9 6η η
Sl. 15.4 Propusnost GBN ARQ u ovisnosti o BER kanala uz ducinu bloka
kao parametar
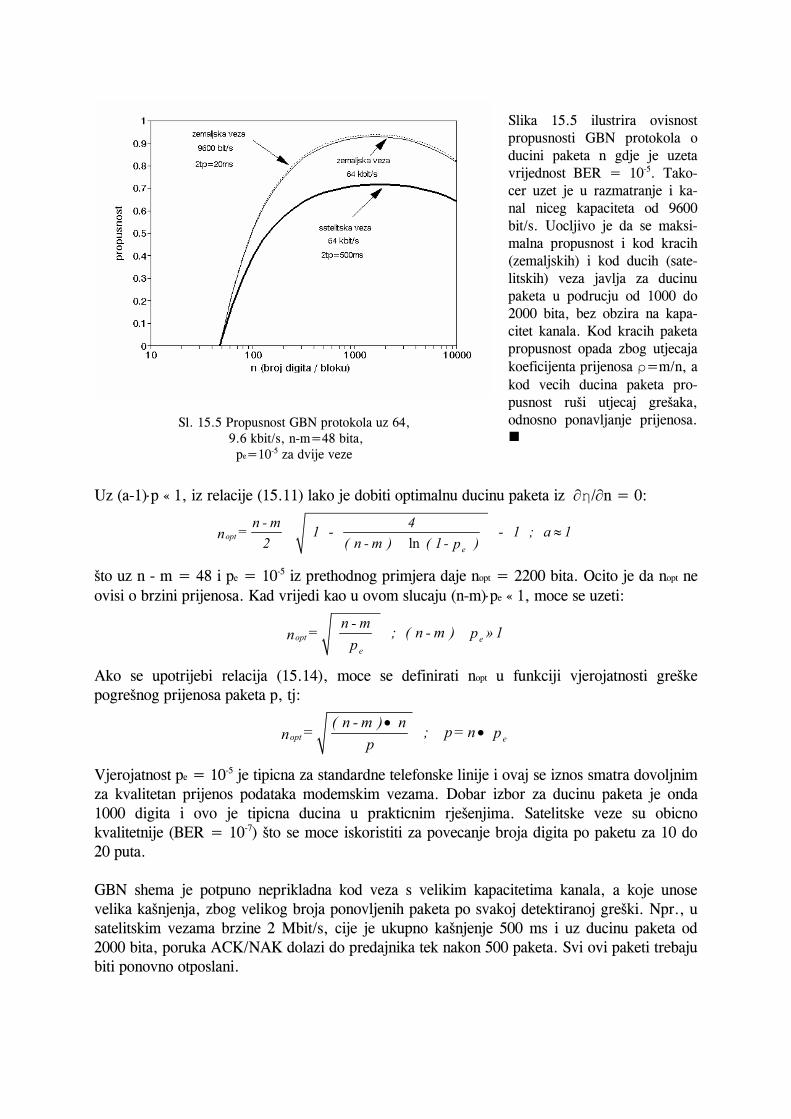
Slika 15.5 ilustrira ovisnost propusnosti GBN protokola o ducini paketa n gdje je uzeta vrijednost BER = 10-5. Tako-cer uzet je u razmatranje i ka-nal niceg kapaciteta od 9600 bit/s. Uocljivo je da se maksi-malna propusnost i kod kracih (zemaljskih) i kod ducih (sate-litskih) veza javlja za ducinu paketa u podrucju od 1000 do 2000 bita, bez obzira na kapa-citet kanala. Kod kracih paketa propusnost opada zbog utjecaja koeficijenta prijenosa ρ=m/n, a kod vecih ducina paketa pro-pusnost ruši utjecaj grešaka, odnosno ponavljanje prijenosa.
Uz (a-1)⋅p « 1, iz relacije (15.11) lako je dobiti optimalnu ducinu paketa iz ∂η/∂n = 0:
što uz n - m = 48 i pe = 10-5 iz prethodnog primjera daje nopt = 2200 bita. Ocito je da nopt ne ovisi o brzini prijenosa. Kad vrijedi kao u ovom slucaju (n-m)⋅pe « 1, moce se uzeti:
Ako se upotrijebi relacija (15.14), moce se definirati nopt u funkciji vjerojatnosti greške pogrešnog prijenosa paketa p, tj:
Vjerojatnost pe = 10-5 je tipicna za standardne telefonske linije i ovaj se iznos smatra dovoljnim za kvalitetan prijenos podataka modemskim vezama. Dobar izbor za ducinu paketa je onda 1000 digita i ovo je tipicna ducina u prakticnim rješenjima. Satelitske veze su obicno kvalitetnije (BER = 10-7) što se moce iskoristiti za povecanje broja digita po paketu za 10 do 20 puta. GBN shema je potpuno neprikladna kod veza s velikim kapacitetima kanala, a koje unose velika kašnjenja, zbog velikog broja ponovljenih paketa po svakoj detektiranoj greški. Npr., u satelitskim vezama brzine 2 Mbit/s, cije je ukupno kašnjenje 500 ms i uz ducinu paketa od 2000 bita, poruka ACK/NAK dolazi do predajnika tek nakon 500 paketa. Svi ovi paketi trebaju biti ponovno otposlani.
Sl. 15.5 Propusnost GBN protokola uz 64,
9.6 kbit/s, n-m=48 bita, pe=10-5 za dvije veze
lnopt
e
n - m 4= 1 - - 1 ; a 1n2 ( n - m ) ( 1- )p
≈
opt ee
n - m = ; ( n - m ) » 1pnp
opt e( n - m ) n = ; p = n pn
p•
•
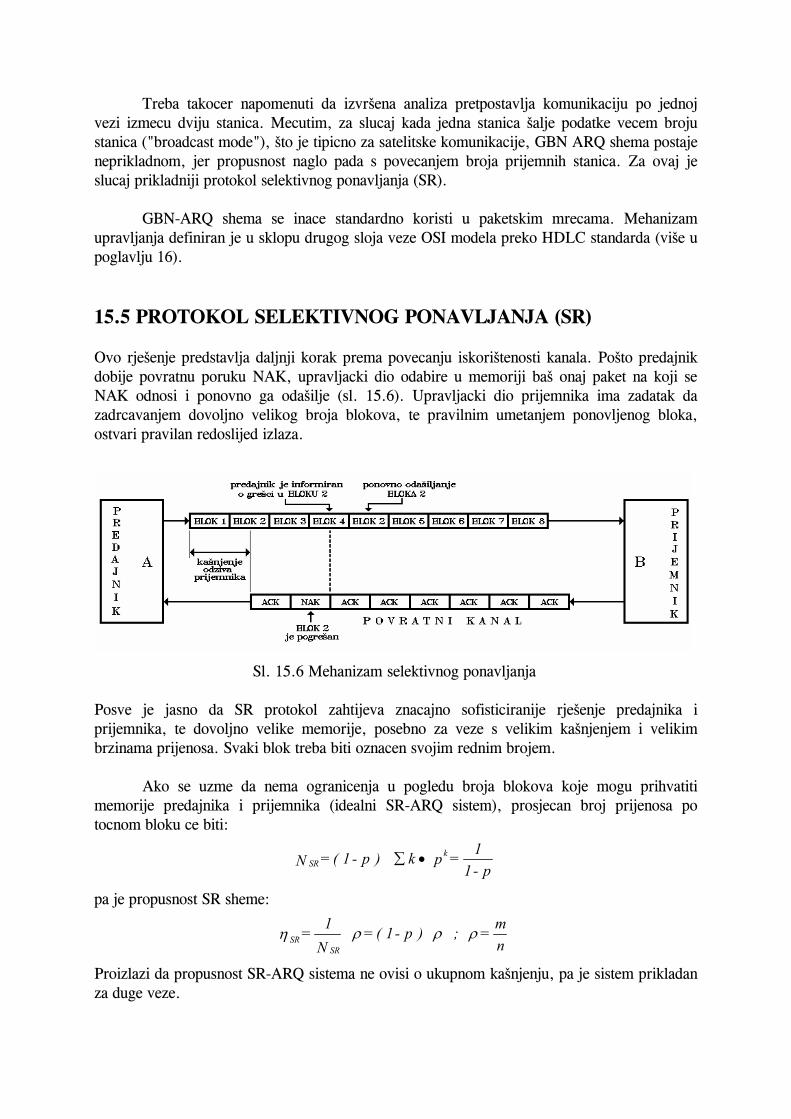
Treba takocer napomenuti da izvršena analiza pretpostavlja komunikaciju po jednoj vezi izmecu dviju stanica. Mecutim, za slucaj kada jedna stanica šalje podatke vecem broju stanica ("broadcast mode"), što je tipicno za satelitske komunikacije, GBN ARQ shema postaje neprikladnom, jer propusnost naglo pada s povecanjem broja prijemnih stanica. Za ovaj je slucaj prikladniji protokol selektivnog ponavljanja (SR). GBN-ARQ shema se inace standardno koristi u paketskim mrecama. Mehanizam upravljanja definiran je u sklopu drugog sloja veze OSI modela preko HDLC standarda (više u poglavlju 16). 15.5 PROTOKOL SELEKTIVNOG PONAVLJANJA (SR) Ovo rješenje predstavlja daljnji korak prema povecanju iskorištenosti kanala. Pošto predajnik dobije povratnu poruku NAK, upravljacki dio odabire u memoriji baš onaj paket na koji se NAK odnosi i ponovno ga odašilje (sl. 15.6). Upravljacki dio prijemnika ima zadatak da zadrcavanjem dovoljno velikog broja blokova, te pravilnim umetanjem ponovljenog bloka, ostvari pravilan redoslijed izlaza.
Sl. 15.6 Mehanizam selektivnog ponavljanja Posve je jasno da SR protokol zahtijeva znacajno sofisticiranije rješenje predajnika i prijemnika, te dovoljno velike memorije, posebno za veze s velikim kašnjenjem i velikim brzinama prijenosa. Svaki blok treba biti oznacen svojim rednim brojem. Ako se uzme da nema ogranicenja u pogledu broja blokova koje mogu prihvatiti memorije predajnika i prijemnika (idealni SR-ARQ sistem), prosjecan broj prijenosa po tocnom bloku ce biti:
pa je propusnost SR sheme:
Proizlazi da propusnost SR-ARQ sistema ne ovisi o ukupnom kašnjenju, pa je sistem prikladan za duge veze.
k
SR1 = ( 1 - p ) k = pN
1- p∑ •
SRSR
1 m = = ( 1- p ) ; = nN
ρ ρ ρη
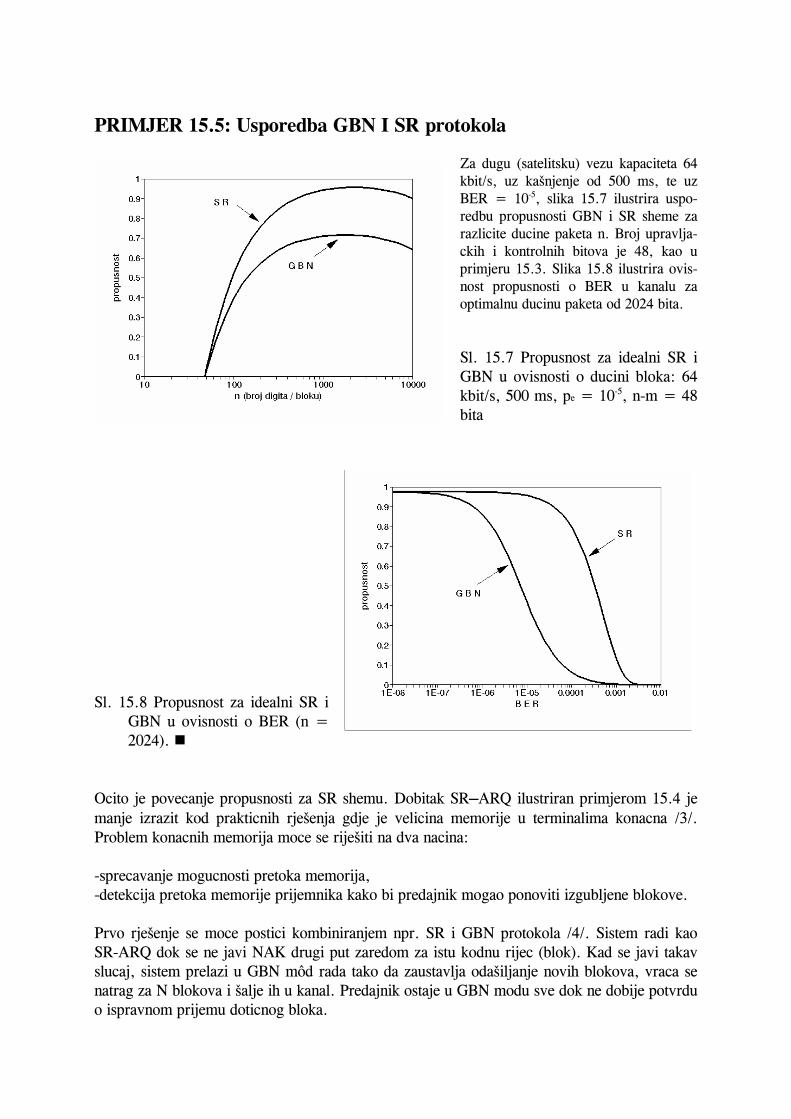
PRIMJER 15.5: Usporedba GBN I SR protokola
Za dugu (satelitsku) vezu kapaciteta 64 kbit/s, uz kašnjenje od 500 ms, te uz BER = 10-5, slika 15.7 ilustrira uspo-redbu propusnosti GBN i SR sheme za razlicite ducine paketa n. Broj upravlja-ckih i kontrolnih bitova je 48, kao u primjeru 15.3. Slika 15.8 ilustrira ovis-nost propusnosti o BER u kanalu za optimalnu ducinu paketa od 2024 bita. Sl. 15.7 Propusnost za idealni SR i GBN u ovisnosti o ducini bloka: 64 kbit/s, 500 ms, pe = 10-5, n-m = 48 bita
Sl. 15.8 Propusnost za idealni SR i
GBN u ovisnosti o BER (n = 2024).
Ocito je povecanje propusnosti za SR shemu. Dobitak SR─ARQ ilustriran primjerom 15.4 je manje izrazit kod prakticnih rješenja gdje je velicina memorije u terminalima konacna /3/. Problem konacnih memorija moce se riješiti na dva nacina: -sprecavanje mogucnosti pretoka memorija, -detekcija pretoka memorije prijemnika kako bi predajnik mogao ponoviti izgubljene blokove. Prvo rješenje se moce postici kombiniranjem npr. SR i GBN protokola /4/. Sistem radi kao SR-ARQ dok se ne javi NAK drugi put zaredom za istu kodnu rijec (blok). Kad se javi takav slucaj, sistem prelazi u GBN môd rada tako da zaustavlja odašiljanje novih blokova, vraca se natrag za N blokova i šalje ih u kanal. Predajnik ostaje u GBN modu sve dok ne dobije potvrdu o ispravnom prijemu doticnog bloka.
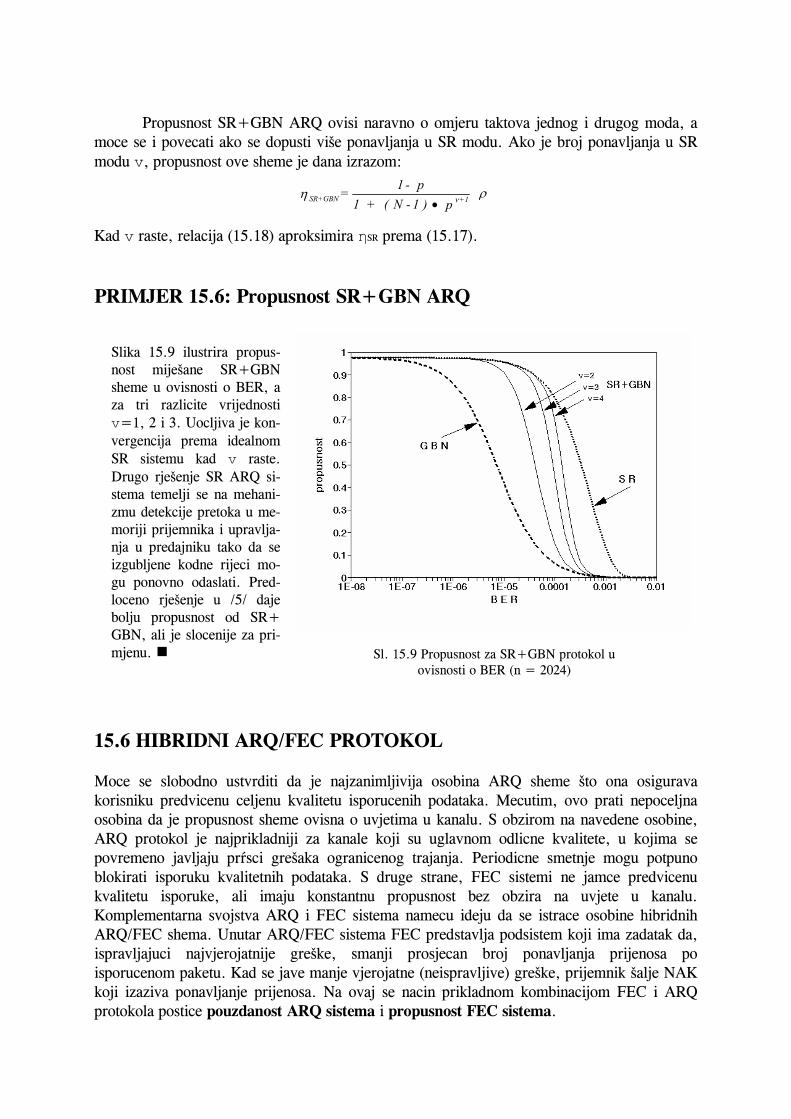
Propusnost SR+GBN ARQ ovisi naravno o omjeru taktova jednog i drugog moda, a moce se i povecati ako se dopusti više ponavljanja u SR modu. Ako je broj ponavljanja u SR modu v, propusnost ove sheme je dana izrazom:
Kad v raste, relacija (15.18) aproksimira ηSR prema (15.17). PRIMJER 15.6: Propusnost SR+GBN ARQ Slika 15.9 ilustrira propus- nost miješane SR+GBN sheme u ovisnosti o BER, a za tri razlicite vrijednosti v=1, 2 i 3. Uocljiva je kon- vergencija prema idealnom SR sistemu kad v raste. Drugo rješenje SR ARQ si- stema temelji se na mehani- zmu detekcije pretoka u me- moriji prijemnika i upravlja- nja u predajniku tako da se izgubljene kodne rijeci mo- gu ponovno odaslati. Pred- loceno rješenje u /5/ daje bolju propusnost od SR+ GBN, ali je slocenije za pri- mjenu. 15.6 HIBRIDNI ARQ/FEC PROTOKOL Moce se slobodno ustvrditi da je najzanimljivija osobina ARQ sheme što ona osigurava korisniku predvicenu celjenu kvalitetu isporucenih podataka. Mecutim, ovo prati nepoceljna osobina da je propusnost sheme ovisna o uvjetima u kanalu. S obzirom na navedene osobine, ARQ protokol je najprikladniji za kanale koji su uglavnom odlicne kvalitete, u kojima se povremeno javljaju prŕsci grešaka ogranicenog trajanja. Periodicne smetnje mogu potpuno blokirati isporuku kvalitetnih podataka. S druge strane, FEC sistemi ne jamce predvicenu kvalitetu isporuke, ali imaju konstantnu propusnost bez obzira na uvjete u kanalu. Komplementarna svojstva ARQ i FEC sistema namecu ideju da se istrace osobine hibridnih ARQ/FEC shema. Unutar ARQ/FEC sistema FEC predstavlja podsistem koji ima zadatak da, ispravljajuci najvjerojatnije greške, smanji prosjecan broj ponavljanja prijenosa po isporucenom paketu. Kad se jave manje vjerojatne (neispravljive) greške, prijemnik šalje NAK koji izaziva ponavljanje prijenosa. Na ovaj se nacin prikladnom kombinacijom FEC i ARQ protokola postice pouzdanost ARQ sistema i propusnost FEC sistema.
SR+GBN +1
1 - p= 1 + ( N - 1 ) p ν ρη
•
Sl. 15.9 Propusnost za SR+GBN protokol u
ovisnosti o BER (n = 2024)
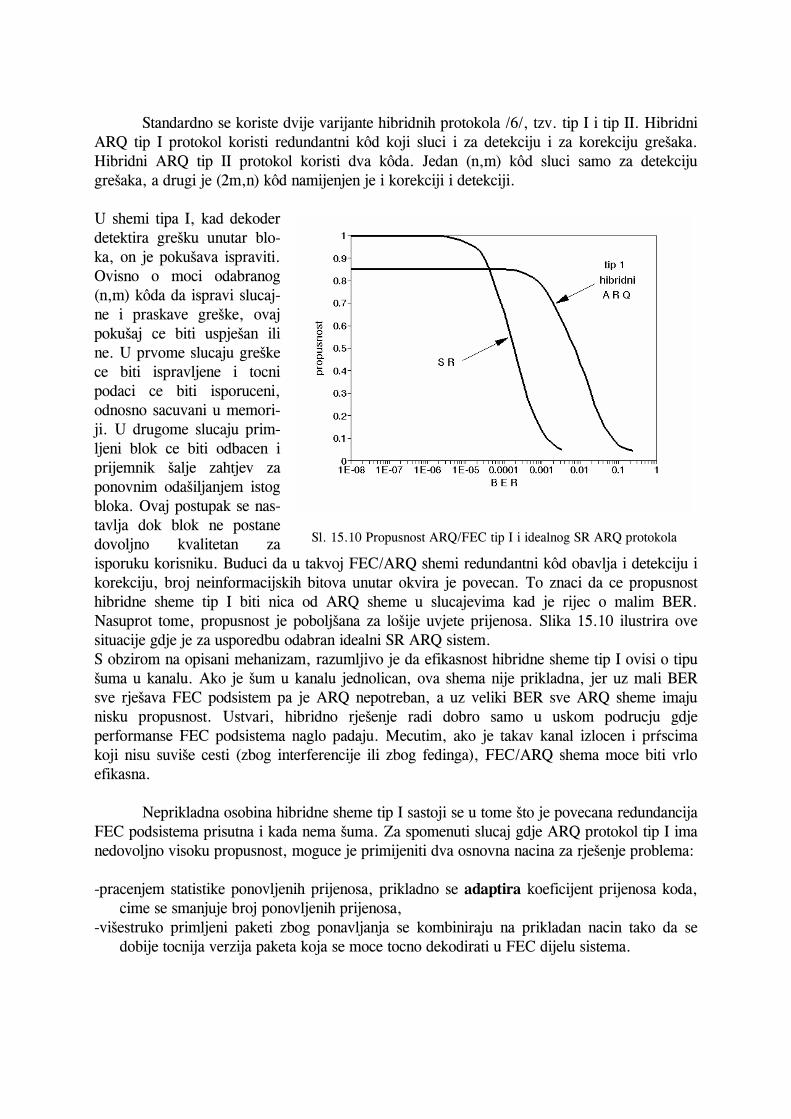
Standardno se koriste dvije varijante hibridnih protokola /6/, tzv. tip I i tip II. Hibridni ARQ tip I protokol koristi redundantni kôd koji sluci i za detekciju i za korekciju grešaka. Hibridni ARQ tip II protokol koristi dva kôda. Jedan (n,m) kôd sluci samo za detekciju grešaka, a drugi je (2m,n) kôd namijenjen je i korekciji i detekciji. U shemi tipa I, kad dekoder detektira grešku unutar blo-ka, on je pokušava ispraviti. Ovisno o moci odabranog (n,m) kôda da ispravi slucaj-ne i praskave greške, ovaj pokušaj ce biti uspješan ili ne. U prvome slucaju greške ce biti ispravljene i tocni podaci ce biti isporuceni, odnosno sacuvani u memori-ji. U drugome slucaju prim-ljeni blok ce biti odbacen i prijemnik šalje zahtjev za ponovnim odašiljanjem istog bloka. Ovaj postupak se nas-tavlja dok blok ne postane dovoljno kvalitetan za isporuku korisniku. Buduci da u takvoj FEC/ARQ shemi redundantni kôd obavlja i detekciju i korekciju, broj neinformacijskih bitova unutar okvira je povecan. To znaci da ce propusnost hibridne sheme tip I biti nica od ARQ sheme u slucajevima kad je rijec o malim BER. Nasuprot tome, propusnost je poboljšana za lošije uvjete prijenosa. Slika 15.10 ilustrira ove situacije gdje je za usporedbu odabran idealni SR ARQ sistem. S obzirom na opisani mehanizam, razumljivo je da efikasnost hibridne sheme tip I ovisi o tipu šuma u kanalu. Ako je šum u kanalu jednolican, ova shema nije prikladna, jer uz mali BER sve rješava FEC podsistem pa je ARQ nepotreban, a uz veliki BER sve ARQ sheme imaju nisku propusnost. Ustvari, hibridno rješenje radi dobro samo u uskom podrucju gdje performanse FEC podsistema naglo padaju. Mecutim, ako je takav kanal izlocen i prŕscima koji nisu suviše cesti (zbog interferencije ili zbog fedinga), FEC/ARQ shema moce biti vrlo efikasna. Neprikladna osobina hibridne sheme tip I sastoji se u tome što je povecana redundancija FEC podsistema prisutna i kada nema šuma. Za spomenuti slucaj gdje ARQ protokol tip I ima nedovoljno visoku propusnost, moguce je primijeniti dva osnovna nacina za rješenje problema: -pracenjem statistike ponovljenih prijenosa, prikladno se adaptira koeficijent prijenosa koda,
cime se smanjuje broj ponovljenih prijenosa, -višestruko primljeni paketi zbog ponavljanja se kombiniraju na prikladan nacin tako da se
dobije tocnija verzija paketa koja se moce tocno dekodirati u FEC dijelu sistema.
Sl. 15.10 Propusnost ARQ/FEC tip I i idealnog SR ARQ protokola
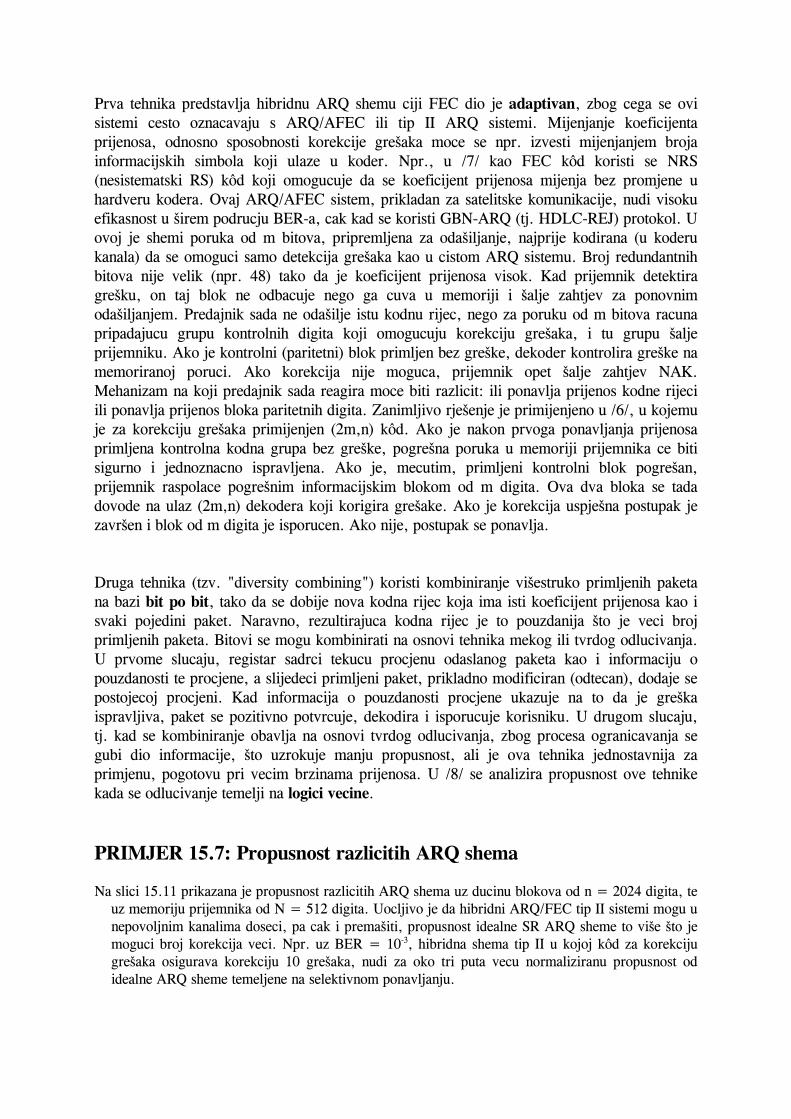
Prva tehnika predstavlja hibridnu ARQ shemu ciji FEC dio je adaptivan, zbog cega se ovi sistemi cesto oznacavaju s ARQ/AFEC ili tip II ARQ sistemi. Mijenjanje koeficijenta prijenosa, odnosno sposobnosti korekcije grešaka moce se npr. izvesti mijenjanjem broja informacijskih simbola koji ulaze u koder. Npr., u /7/ kao FEC kôd koristi se NRS (nesistematski RS) kôd koji omogucuje da se koeficijent prijenosa mijenja bez promjene u hardveru kodera. Ovaj ARQ/AFEC sistem, prikladan za satelitske komunikacije, nudi visoku efikasnost u širem podrucju BER-a, cak kad se koristi GBN-ARQ (tj. HDLC-REJ) protokol. U ovoj je shemi poruka od m bitova, pripremljena za odašiljanje, najprije kodirana (u koderu kanala) da se omoguci samo detekcija grešaka kao u cistom ARQ sistemu. Broj redundantnih bitova nije velik (npr. 48) tako da je koeficijent prijenosa visok. Kad prijemnik detektira grešku, on taj blok ne odbacuje nego ga cuva u memoriji i šalje zahtjev za ponovnim odašiljanjem. Predajnik sada ne odašilje istu kodnu rijec, nego za poruku od m bitova racuna pripadajucu grupu kontrolnih digita koji omogucuju korekciju grešaka, i tu grupu šalje prijemniku. Ako je kontrolni (paritetni) blok primljen bez greške, dekoder kontrolira greške na memoriranoj poruci. Ako korekcija nije moguca, prijemnik opet šalje zahtjev NAK. Mehanizam na koji predajnik sada reagira moce biti razlicit: ili ponavlja prijenos kodne rijeci ili ponavlja prijenos bloka paritetnih digita. Zanimljivo rješenje je primijenjeno u /6/, u kojemu je za korekciju grešaka primijenjen (2m,n) kôd. Ako je nakon prvoga ponavljanja prijenosa primljena kontrolna kodna grupa bez greške, pogrešna poruka u memoriji prijemnika ce biti sigurno i jednoznacno ispravljena. Ako je, mecutim, primljeni kontrolni blok pogrešan, prijemnik raspolace pogrešnim informacijskim blokom od m digita. Ova dva bloka se tada dovode na ulaz (2m,n) dekodera koji korigira grešake. Ako je korekcija uspješna postupak je završen i blok od m digita je isporucen. Ako nije, postupak se ponavlja. Druga tehnika (tzv. "diversity combining") koristi kombiniranje višestruko primljenih paketa na bazi bit po bit, tako da se dobije nova kodna rijec koja ima isti koeficijent prijenosa kao i svaki pojedini paket. Naravno, rezultirajuca kodna rijec je to pouzdanija što je veci broj primljenih paketa. Bitovi se mogu kombinirati na osnovi tehnika mekog ili tvrdog odlucivanja. U prvome slucaju, registar sadrci tekucu procjenu odaslanog paketa kao i informaciju o pouzdanosti te procjene, a slijedeci primljeni paket, prikladno modificiran (odtecan), dodaje se postojecoj procjeni. Kad informacija o pouzdanosti procjene ukazuje na to da je greška ispravljiva, paket se pozitivno potvrcuje, dekodira i isporucuje korisniku. U drugom slucaju, tj. kad se kombiniranje obavlja na osnovi tvrdog odlucivanja, zbog procesa ogranicavanja se gubi dio informacije, što uzrokuje manju propusnost, ali je ova tehnika jednostavnija za primjenu, pogotovu pri vecim brzinama prijenosa. U /8/ se analizira propusnost ove tehnike kada se odlucivanje temelji na logici vecine. PRIMJER 15.7: Propusnost razlicitih ARQ shema Na slici 15.11 prikazana je propusnost razlicitih ARQ shema uz ducinu blokova od n = 2024 digita, te
uz memoriju prijemnika od N = 512 digita. Uocljivo je da hibridni ARQ/FEC tip II sistemi mogu u nepovoljnim kanalima doseci, pa cak i premašiti, propusnost idealne SR ARQ sheme to više što je moguci broj korekcija veci. Npr. uz BER = 10-3, hibridna shema tip II u kojoj kôd za korekciju grešaka osigurava korekciju 10 grešaka, nudi za oko tri puta vecu normaliziranu propusnost od idealne ARQ sheme temeljene na selektivnom ponavljanju.
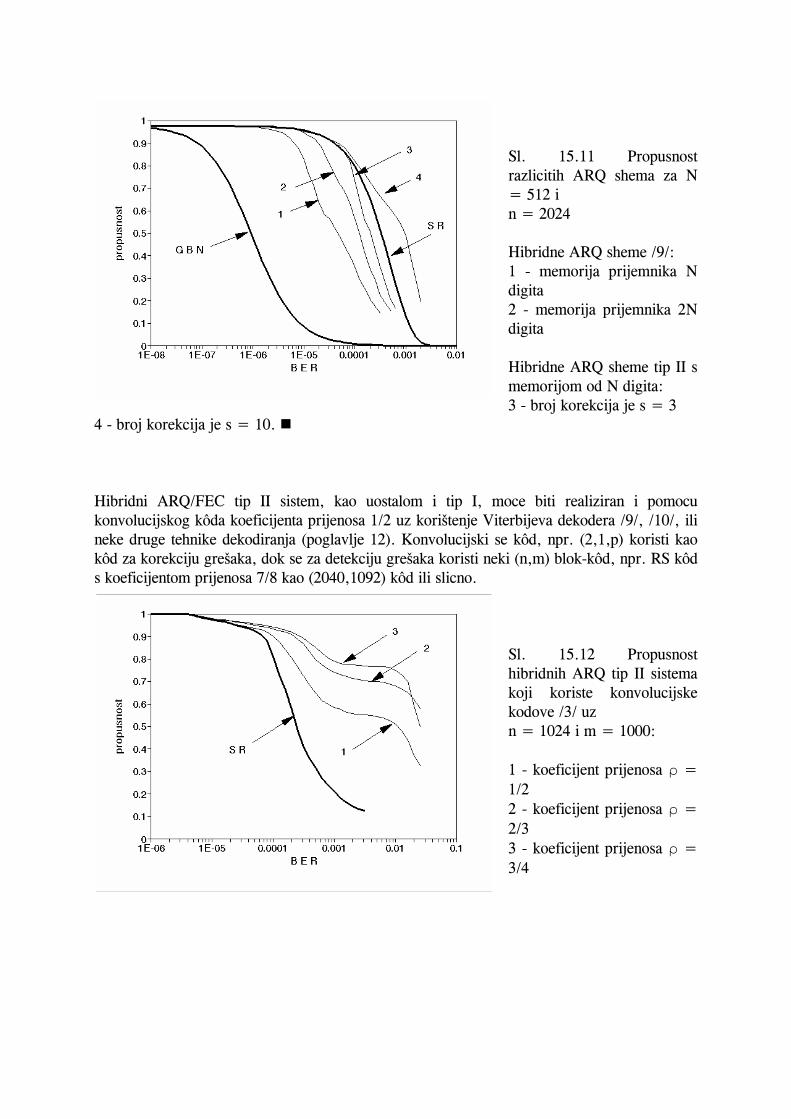
Sl. 15.11 Propusnost razlicitih ARQ shema za N = 512 i n = 2024 Hibridne ARQ sheme /9/: 1 - memorija prijemnika N digita 2 - memorija prijemnika 2N digita Hibridne ARQ sheme tip II s memorijom od N digita: 3 - broj korekcija je s = 3
4 - broj korekcija je s = 10. Hibridni ARQ/FEC tip II sistem, kao uostalom i tip I, moce biti realiziran i pomocu konvolucijskog kôda koeficijenta prijenosa 1/2 uz korištenje Viterbijeva dekodera /9/, /10/, ili neke druge tehnike dekodiranja (poglavlje 12). Konvolucijski se kôd, npr. (2,1,p) koristi kao kôd za korekciju grešaka, dok se za detekciju grešaka koristi neki (n,m) blok-kôd, npr. RS kôd s koeficijentom prijenosa 7/8 kao (2040,1092) kôd ili slicno.
Sl. 15.12 Propusnost hibridnih ARQ tip II sistema koji koriste konvolucijske kodove /3/ uz n = 1024 i m = 1000: 1 - koeficijent prijenosa ρ = 1/2 2 - koeficijent prijenosa ρ = 2/3 3 - koeficijent prijenosa ρ = 3/4
Slika 15.12 ilustrira propusnost hibridne ARQ tip II sheme za razlicite koeficijente prijenosa konvolucijskih kodova uz n = 1024 i m = 1000 /3/. Uocljivo je da se primjenom ovakvih shema, propusnost odrcava na razumno velikoj visini (iznad 50%) i do BER preko 10-2. Zbog primjene sekvencijalnih dekodera, brzina dekodiranja ovisi o BER. Za veca kašnjenja definira se prag ("time-out") pri kojem se, ako nije završeno dekodiranje, šalje NAK. LITERATURA /1/N. Rožic, D. Begušic, J. Juric, N. Kolundžic: "NAVTEX prijemnik - domace rješenje",
ETAN u pomorstvu, Zadar, 1986. /2/H.O. Burton, D.D. Sullivan: "Errors and Error Control", Proc. IEEE, Vol.60, November
1972, (1293 - 1301). /3/S. Lin, D.J. Costello Jr, M.J. Miller: "A survey of various ARQ and Hybrid ARQ schemes,
and error detection using linear block codes", IEEE Commun. Mag., December 1984, (5 - 17).
/4/M.J. Miller, S. Lin: "The analysis of same selective-repeat ARQ schemes with finite receiver buffer", IEEE Trans. on Commun. COM-29, September 1981, (1307 - 1315).
/5/P.S. Yu, S. Lin: "An efficient selective-repeat ARQ scheme for satellite channels and its throughtput analysis", IEEE Trans. on Commun. COM-29, March 1981, (353 - 363).
/6/S. Lin, P.S. Yu: "A hybrid ARQ scheme with parity retransmission for error control of satellite channels", IEEE Trans. on Commun. COM-30, July 1982, (1701 - 1719).
/7/A. Shiozaki, K. Okuno, K. Suzuki, T. Segawa: "A Hybrid ARQ Sheme with Adaptive Error Correction for Satellite Communications", IEEE Trans. on Commun., COM-39, April 1991, (482 - 484).
/8/S.B. Wicker: "Adaptive Rate Error Control Through the Use of Diversity Combining and Majority-Logic Decoding in a Hybrid-ARQ Protocol", IEEE Trans. on Commun., COM-39, March 1991, (380 - 385).
/9/H. Yamamoto, K. Hoh: "Viterbi decoding algorithm for convolutional codes with repeat requests", IEEE Trans. on Inf. Theory IT-26, September 1980 (540 - 547).
/10/A. Drukarev, D.J. Costello,Jr.: "Hybrid ARQ error control using sequential decoding", IEEE Trans. on Inf. Theory IT-29, July 1983, (521 - 535).
/11/A. Drukarev, D.J. Costello,Jr.: "A comparison of block and convolutional codes in ARQ error control schemes", IEEE Trans. on Comm. COM-30, November 1982, (2449 - 2455).

POGLAVLJE 3. KODIRANJE 60
3.3 Zadaci
3.1 Zadana je generator matrica za linearni blok kod:
G =
0 0 1 1 1 0 1
0 1 0 0 1 1 1
1 0 0 1 1 1 0
(3.80)
(a) izraziti G kao sistematsku matricu u obliku [I|P]
(b) Odrediti matricu pariteta H
(c) Konstruirati tablicu sindroma koda
(d) Odrediti minimalnu distancu koda
(e) Pokazati da je kodna riječ koja odgovara informacijskoj sekvenci 101 orto-gonalna matrici pariteta H
3.2 Napisati sve kodne riječi koje generiraju matrice G1 i G2, te pokazati da objegenerator matrice generiraju isti kod.
G1 =
1 0 1 1 0 0 0
0 1 0 1 1 0 0
0 0 1 0 1 1 0
0 0 0 1 0 1 1
G2 =
1 0 0 0 1 0 1
0 1 0 0 1 1 1
0 0 1 0 1 1 0
0 0 0 1 0 1 1
(3.81)
3.3 Distribucija težine Hammingovok koda je poznata. Izražena pomoću polinoma,distribucija težine Hammingovog blok koda duljine n je:
A(x) =1
n[(1 + x)n + n(1 + x)
n−12 (1− x)
n+12 ] (3.82)
Pomoću navedene formule izračunati distribuciju težine Hammingovog (7, 4)koda.
3.4 Polinomg(p) = p4 + p+ 1 (3.83)
je generator polinom za (15, 11) Hammingov binarni kod.(a) Odrediti generator matricu G za navedeni kod u sistematskom obliku.
(b) Odrediti generator polinom za dualni kod.
3.5 Za (7, 4) ciklički Hammingov kod definiran generator polinomom g(p) = p3 +
p2 + 1 konstruirti (8, 4) prošireni Hammingov kod i napisati sve kodne riječi.Kolika je dmin proširenog koda?
3.6 Linearni blok kod (8, 4) je konstruiran skraćivanjem Hammingovog (15, 11)koda generiranog generator polinomom g(p) = p4 + p+ 1.
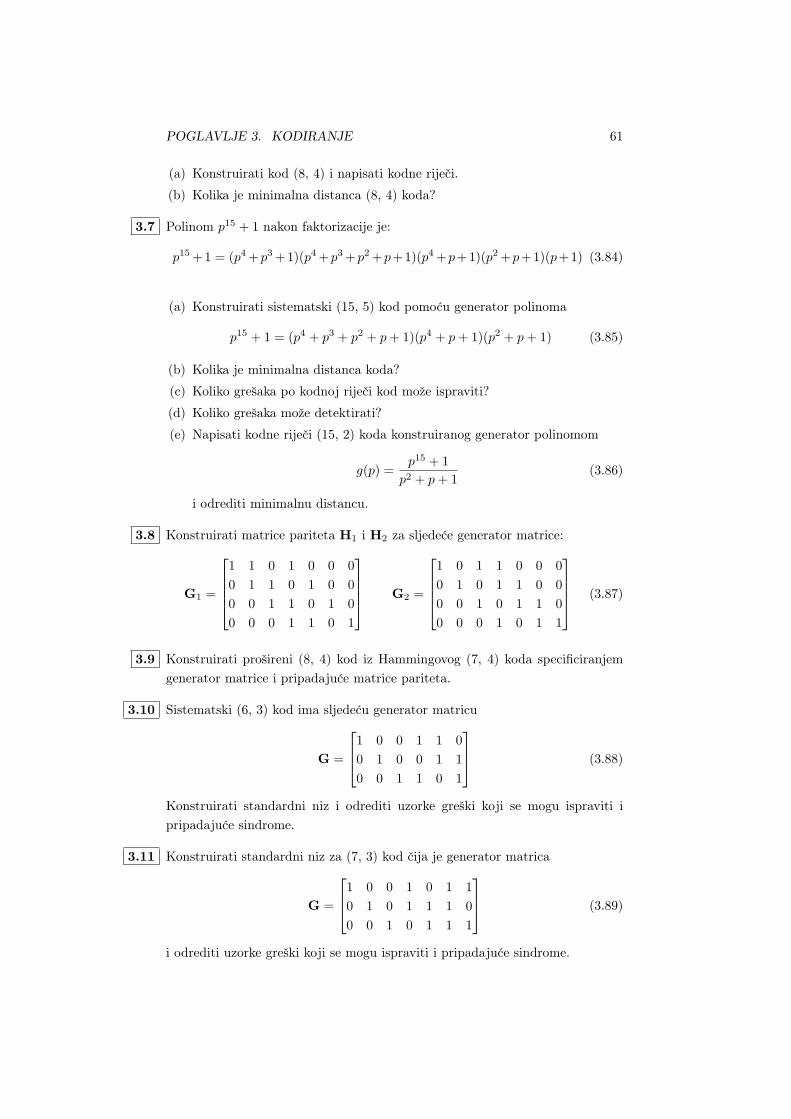
POGLAVLJE 3. KODIRANJE 61
(a) Konstruirati kod (8, 4) i napisati kodne riječi.
(b) Kolika je minimalna distanca (8, 4) koda?
3.7 Polinom p15 + 1 nakon faktorizacije je:
p15+1 = (p4+p3+1)(p4+p3+p2+p+1)(p4+p+1)(p2+p+1)(p+1) (3.84)
(a) Konstruirati sistematski (15, 5) kod pomoću generator polinoma
p15 + 1 = (p4 + p3 + p2 + p+ 1)(p4 + p+ 1)(p2 + p+ 1) (3.85)
(b) Kolika je minimalna distanca koda?
(c) Koliko grešaka po kodnoj riječi kod može ispraviti?
(d) Koliko grešaka može detektirati?
(e) Napisati kodne riječi (15, 2) koda konstruiranog generator polinomom
g(p) =p15 + 1
p2 + p+ 1(3.86)
i odrediti minimalnu distancu.
3.8 Konstruirati matrice pariteta H1 i H2 za sljedeće generator matrice:
G1 =
1 1 0 1 0 0 0
0 1 1 0 1 0 0
0 0 1 1 0 1 0
0 0 0 1 1 0 1
G2 =
1 0 1 1 0 0 0
0 1 0 1 1 0 0
0 0 1 0 1 1 0
0 0 0 1 0 1 1
(3.87)
3.9 Konstruirati prošireni (8, 4) kod iz Hammingovog (7, 4) koda specificiranjemgenerator matrice i pripadajuće matrice pariteta.
3.10 Sistematski (6, 3) kod ima sljedeću generator matricu
G =
1 0 0 1 1 0
0 1 0 0 1 1
0 0 1 1 0 1
(3.88)
Konstruirati standardni niz i odrediti uzorke greški koji se mogu ispraviti ipripadajuće sindrome.
3.11 Konstruirati standardni niz za (7, 3) kod čija je generator matrica
G =
1 0 0 1 0 1 1
0 1 0 1 1 1 0
0 0 1 0 1 1 1
(3.89)
i odrediti uzorke greški koji se mogu ispraviti i pripadajuće sindrome.
POGLAVLJE 3. KODIRANJE 62
3.12 Odrediti uzorke greški (najmanjih težina) koji se mogu ispraviti i pripadajućesindrome za sistematski (7, 4) ciklički Hammingov kod.
3.13 Dokazati, ako je suma dva vektora greški e1 i e2 je valjana kodna riječ C, dauzorci imaju isti sindrom.
3.14 Neka je g(p) = p8 + p6 + p4 + p2 + 1 polinom nad binarnim poljem.(a) Pronaći ciklički kod najmanje brzine čiji je generator polinom g(p). Kolika
je brzina koda?
(b) Pronaći minimalnu distancu koda iz (a)
(c) Pronaći kodni dobitak koda iz (a)
3.15 Neka je g(p) = p+ 1 polinom nad binarnim poljem.(a) Pokazati da polinom g(p) može generirati ciklički kod proizvoljnog n i odre-
diti pripadajući k
(b) Pronaći sistematski oblik G i H koda generiranog polinomom g(p)
(c) Koji tip koda generira polinom g(p)?
3.16 Dizajnirati (6, 2) ciklički kod izborom najkraćeg mogućeg generator polinoma.
(a) Odrediti generator matricu G (u sistematskom obliku) za ovaj kod i naćisve kodne riječi koda.
(b) Koliko grešaka može ispraviti ovaj kod.
3.17 Izračunati vjerojatnost greške za Hammingov (7, 4) kod u AWGN kanalu zatvrdo i meko odlučivanje.
Poglavlje 4
Komunikacijske mreže
4.1 Uvod i osnovni pojmovi
Komunikacijska mreža je sustav koji uređajima koji se priključe na mrežu omo-gućava prijenos informacija. Uređaji koji se spajaju na mrežu se obično nazivajukrajnji uređaji. Dva su osnovna elementa u mreži:
• Mrežni čvorovi
• Grane
U čvoru se obavljaju funkcije prospajanja, odnosno komutiranja (switching)i usmjeravanja (routing) informacijskih tokova. Informaciju koju čvor primi naulaznom priključku usmjerava prema izlaznom priključku. Čvorovi međusobnoizmjenjuju informaciju i informacijskim tokovima i smjerovima, te na temeljutih informacija sukladno komunikacijskom protokolu čvor obavlja usmjeravanje.čvor može biti povezan s drugim čvorovima ili sa krajnjim uređajem i čvoro-vima. čvorovi se međusobno povezuju granama te na taj način tvore mrežuodređene topologije što ovisi o tome na koji način su izvedene grane. Krajnjiuređaji se spajaju na čvorove granama. Na slici 4.1 je prikazana primjer izvedbekomunikacijske mreže.
Komunikacijske grane mogu biti realizirane različitim tehnologijama u okviruiste mreže, npr. svjetlovodom, bakrenim kabelom, bežičnom vezom itd. Svakikrajnji uređaj ima svoju jedinstvenu adresu, i sa stajališta krajnjeg uređajasama struktura mreže nije vidljiva. Komunkacija među krajnjim uređajima seostvaruje preko grana i čvorova pri čemu se u čvorovima određuju smjerovikojima će informacija putovati. Krajnji uređaj treba poznavati adresu uređajas kojim želi uspostaviti komunikaciju.
Ako je udaljenost između krajnjih uređaja do nekoliko kilometara, tada seradi o mreži na lokalnom području (Local Area Network - LAN. Uobičajeno selokalna mreža izvodi unutar jedne zgrade ili u nekoliko zgrada koje su fizički
63
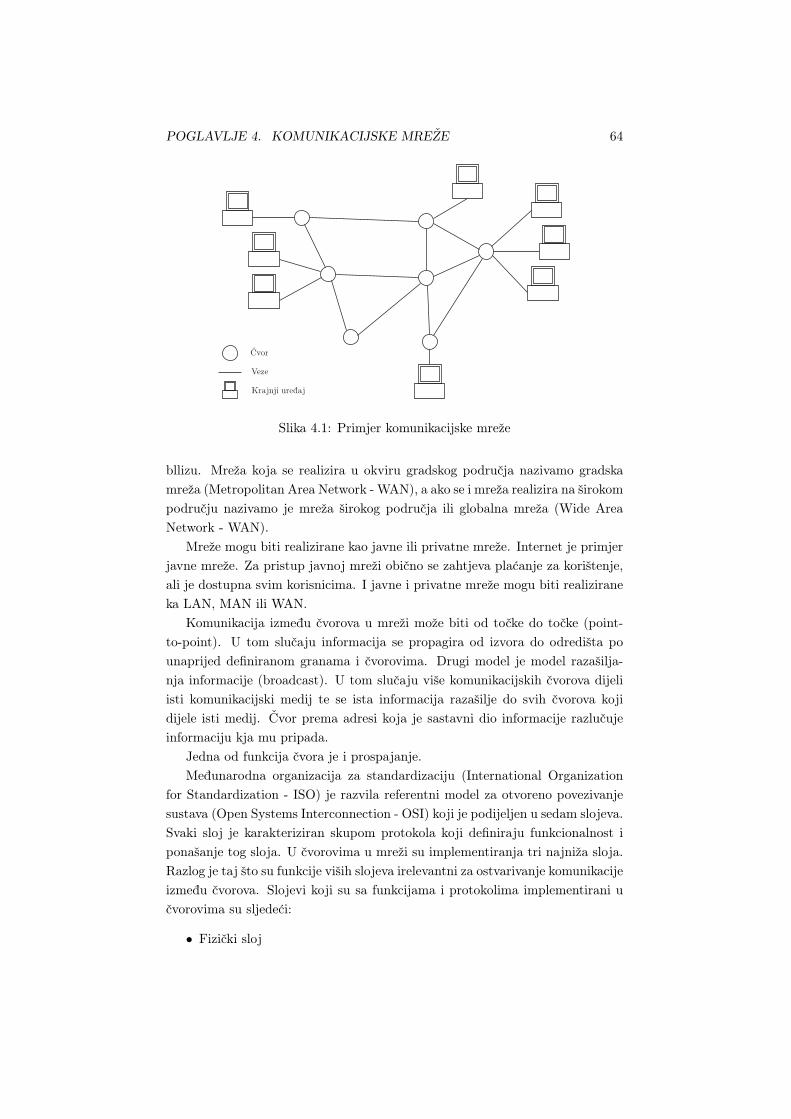
POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 64
Slika 4.1: Primjer komunikacijske mreže
bllizu. Mreža koja se realizira u okviru gradskog područja nazivamo gradskamreža (Metropolitan Area Network - WAN), a ako se i mreža realizira na širokompodručju nazivamo je mreža širokog područja ili globalna mreža (Wide AreaNetwork - WAN).
Mreže mogu biti realizirane kao javne ili privatne mreže. Internet je primjerjavne mreže. Za pristup javnoj mreži obično se zahtjeva plaćanje za korištenje,ali je dostupna svim korisnicima. I javne i privatne mreže mogu biti realiziraneka LAN, MAN ili WAN.
Komunikacija između čvorova u mreži može biti od točke do točke (point-to-point). U tom slučaju informacija se propagira od izvora do odredišta pounaprijed definiranom granama i čvorovima. Drugi model je model razašilja-nja informacije (broadcast). U tom slučaju više komunikacijskih čvorova dijeliisti komunikacijski medij te se ista informacija razašilje do svih čvorova kojidijele isti medij. Čvor prema adresi koja je sastavni dio informacije razlučujeinformaciju kja mu pripada.
Jedna od funkcija čvora je i prospajanje.Međunarodna organizacija za standardizaciju (International Organization
for Standardization - ISO) je razvila referentni model za otvoreno povezivanjesustava (Open Systems Interconnection - OSI) koji je podijeljen u sedam slojeva.Svaki sloj je karakteriziran skupom protokola koji definiraju funkcionalnost iponašanje tog sloja. U čvorovima u mreži su implementiranja tri najniža sloja.Razlog je taj što su funkcije viših slojeva irelevantni za ostvarivanje komunikacijeizmeđu čvorova. Slojevi koji su sa funkcijama i protokolima implementirani učvorovima su sljedeći:
• Fizički sloj
POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 65
• Podatkovni sloj
• Mrežni sloj
U nastavku će biti ukratko opisane funkcije pojedinih slojeva.
4.2 Fizički sloj
Na fizičkom sloju obavlja se prijenos podataka preko komunikacijskih veza. Nafizičkom sloju se određuje:
• Na koji način uspostaviti liniju izmqdju dva komunikacijska uređaja
• Kako prekinuti liniju kada više nije potrebna
• Valni oblik koji predstavlja simbole, odnosno bitove
• Da li je veza jednosmjerna ili dvosmjerna
• Karakteristike medija kojim se propagira signal
• Karakteristike priključaka
• Kako se multipleksiraju odlazni podaci i demultipleksiraju dolazni podaciako više korisnika koristi isti medij
• Tip modulacije za prijenos digitalnih podataka analognim kanalom
Fizički sloj sve gore navedene osobine razdvaja od viših slojeva. Mogu se raz-likovati tri kategorije opreme čije spajanje na mrežu se realizira na fizičkomsloju.
1. Oprema podatkovnog terminala (Data Terminal Equipment - DTE). Od-nosi se na opreme koja prema odlazne podatke, od strane korisnika, pre-tvara u odgovarajući prijenosni signal i obrnuto. DTE oprema se možerealizirati na razne načine, uobičajeno su to terminali, računala. DTE seobično nalazi na strani korisnika.
2. Oprema podatkovnog terminalskog kruga (Data Circuit-terminating Equ-ipment - DCE). Odnosi se na opremu koja povezuje DTE s mrežnim ko-munikacijskim linijama. Pri čemu na strani DTE-a i na strani mreže nemoraju biti isti tipovi signala, npr. na strani DTE-a može biti električnisignal, a na strani mreže optički signal. Pretvorba signala se obavlja uTCE-u. DCE može biti izdvojeni uređaj, a može biti i dio DTE-a. Mo-demi i multiplekseri su primjeri DCE uređaja.
3. Oprema za komutiranje (Data Switching Equipment - DSE). Odnosi se naopremu pomoću koje se spajaju DCE uređaji, a radi se zapravo o čvrovimau mreži u kojima se usmjerava tok podataka.

POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 66
Slika 4.2: Mrežni uređaji
Veza između uređaja može se podijeliti u tri kategorije:
1. Jednosmjerna veza (simplex), odnosno simpleks veza kod koje podacimogu putovati samo u jednom smjeru. Ovakva veza je uobičajena gdjeuređaj samo prima ili šalje informaciju, npr. printer.
2. Obosmjerna neistodobna veza (half - duplex), odnosno poludupleksnaveza. U ovakvoj vezi podaci mogu putovati u oba smjera, ali ne istodobno.
3. Obosmjerna istodobna veza (full - duplex), odnosno istodoban dvosmjeranprijenos podataka.
4.3 Podatkovni sloj
Uloga podatkovnog sloja je osigurati pouzdan prijenos podataka preko komu-nikacijskog kanala koji je uspostavljen na fizičkoj razini. U tu svrhu na po-datkovnom sloju se tok podataka dijeli u podatkovne okvire koji se prenosesekvencijalno preko komunikacijskog kanala. Tijekom slanja podatkovnog ok-vira vrši se provjera da li je došlo do greške u prijenosu. Protokoli podatkovnogsloja obavljaju sljedeće funkcije:
• Dijeli se tok podataka u podatkovne okvire
• Dodaje se odgovarajući uzorak kojim se međusobno odjeljuju podatkovniokviri
• Detektiraju se pogreške koristeći redundantno kodiranje
• Podatkovni okvir na kojemu je detektirana pogreška se retransmitira
• Upravlja se tokom podataka vodeći računa o brzini pojedinog toka kojeopćenito mogu biti različite
Protokoli podatkovnog sloja su podijeljeni u dvije osnovne kategorije, sin-kroni i asinroni protokoli.
4.4 Mrežni sloj
Na sloju mreže primarna zadaća koja se obavlja je usmjeravanje podataka sjednog kraja na drugi kraj mreže koristeći mrežnu infrastrukturu. Na mrežnosloju su određeni:

POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 67
• Sučelje između krajnjeg uređaja i mreže
• Sučelja između dva krajnja uređaja
• Usmjeravanje paketa preko mreže, uključujući i upravljanje zagušenjem
• Osiguravanje urednog rasporeda paketa
• sakupljanje statističkih podataka s ciljem određivanja efikasnosti mreže
• Komunikacija između dvije različite mreže
Mrežni sloj sve gore navedene funkcije razdvaja od viših slojeva. Na sloju mrežeosigurava se skup usluga sloju prijenosa.
4.4.1 Metode prospajanja
Prospajanje je postupak kojim se uspostavlja put od točke do točke u komu-nikacijskohj mreži. u postupak prospajanja uključeni su čvorovi, iz kojih jemoguće uspostaviti vezu liniju sa drugiom čvorom. Jedna od osnovnih zadaćasloja mreže je iskoristiti mogućnost prospajanja u čvorovima da bi se porukapravilno usmjerila prema odredištu.
Prospajanje se može obavljati na dva načina:
• Prospajanjem kanala
• Prospajanjem paketa
Prospajanje kanala
U modelu s prospajanjem kanala, da bi dva krajnja uređaja uspostavila komu-nikaciju uspostavlja se komunikacijska veza između tih stanica preko čvorova igrana koja je namjenjena za prijenos informacijskog toka koji izmjenjuju samoti krajnji uređaji. Veza koja je uspostavljena održava se dokle god traje komu-nikacija između krajnjih uređaja. Za vrijeme trajanja uspostavljene veze, drugikorisnici ne mogu uspostaviti vezu dok se ne oslobodi odgovarajući kapacitet.Prednost ovakvog načina prospajanja je u malom kašnjenju, koje je određenovremenom propagacije signala. Prospajanje kanala je prikladno za prijenos go-vornih signala i za satelitske veze, dok ovakav način prospajanja nije prikladanza prospajanje informacijskih tokova generiranih računalom s obzirom na nji-hova statistička svojstva. Tehnike kojima se može ostvariti prospajanje kodprospajanja kanala su:
• Prospajanje s prostornom raspodjelom
• Prospajanje s vremenskom raspodjelom

POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 68
Prospajanje s prostornom raspodjelom može se realizirati pomoću tri osnovnatipa prospojnika.
1. Kvadratna spojna mreža - prostorno prospajanje s N ulaza i N izlaza.
U svakom presjecištu nalazi se mehanički ili elektronički preklopnik. Kodovakve kvadratne matrice, uvijek je moguća veza između ulaza i izlaza(ako željeni izlaz nije već spojen, odnosno zauzet). Ovakav preklopnikse zove striktno neblokirajući (svatko sa svakim). Kao mjera složenostikomutatora može se uzeti potreban broj presjecišta, koji je općenito N×N .
Slika 4.3: Kvadratna spojna mreža
2. Pravokutna spojna mreža - prostorno spajanje s N ulaza i M izlaza.
Prospojnik može imati različit broj ulaza i izlaza pa upravljački sustav us-postavlja vezu određenog ulaza sa željenim ili raspoloživim izlazom. Op-ćenito se može upotrijebiti N × M matrica. Uz M ≥ N , nema pojaveblokiranja, jer su svi izlazi uvijek dostupni ako su slobodni. Uz M < N
je moguće blokiranje i to za N −M linija. Broj presjecišta je N ×M .
Slika 4.4: Pravokutna spojna mreža
3. Trokutasta spojna mreža - jednostrana spojna mreža.
Trokutasta spojna mreža nije podjeljena u grupu ulaznih i izlaznih priklju-čaka. Realizacija omogučava spajanje dva proizvoljna priključka, a brojpresjecišta je N(N − 1)/2. Trokutasta mreža je striktno neblokirajuća.
Slika 4.5: Trokutasta spojna mreža
S obzirom da realizacija prospojnika s velikim brojem priključaka nije jed-nostavna, s obzirom na dobivene dimenzije prospojnika, prospanjanje se može
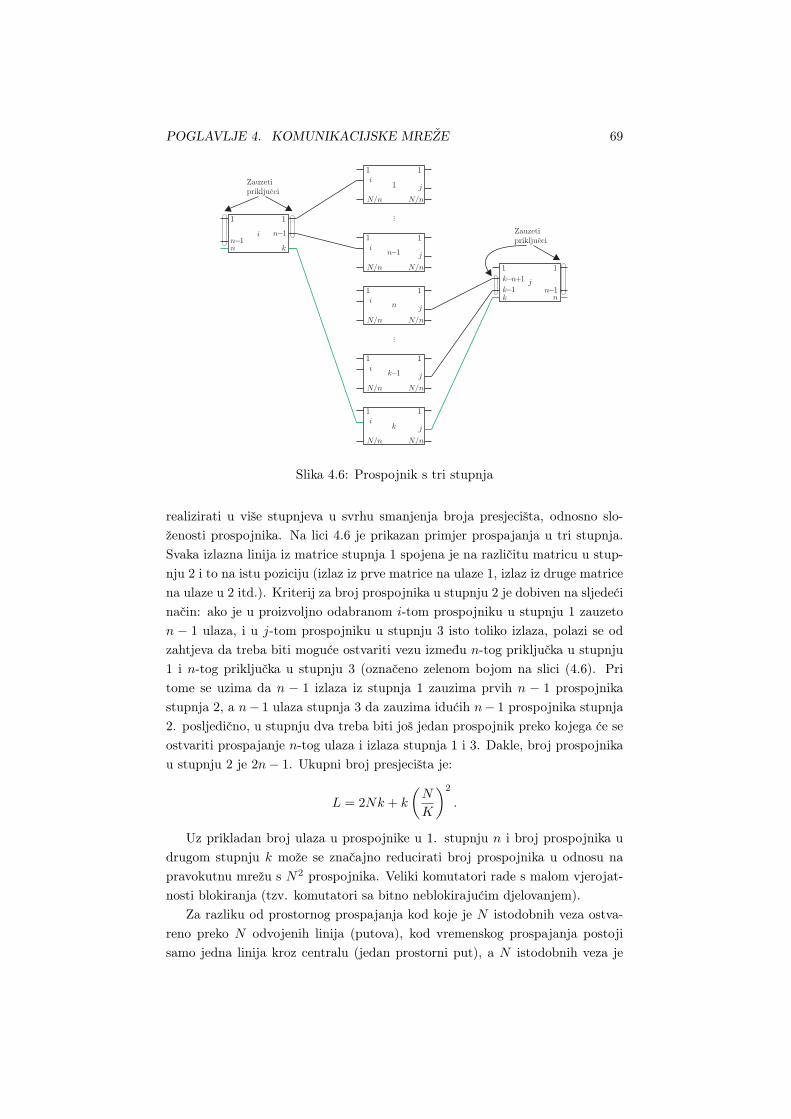
POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 69
Slika 4.6: Prospojnik s tri stupnja
realizirati u više stupnjeva u svrhu smanjenja broja presjecišta, odnosno slo-ženosti prospojnika. Na lici 4.6 je prikazan primjer prospajanja u tri stupnja.Svaka izlazna linija iz matrice stupnja 1 spojena je na različitu matricu u stup-nju 2 i to na istu poziciju (izlaz iz prve matrice na ulaze 1, izlaz iz druge matricena ulaze u 2 itd.). Kriterij za broj prospojnika u stupnju 2 je dobiven na sljedećinačin: ako je u proizvoljno odabranom i-tom prospojniku u stupnju 1 zauzeton − 1 ulaza, i u j-tom prospojniku u stupnju 3 isto toliko izlaza, polazi se odzahtjeva da treba biti moguće ostvariti vezu između n-tog priključka u stupnju1 i n-tog priključka u stupnju 3 (označeno zelenom bojom na slici (4.6). Pritome se uzima da n − 1 izlaza iz stupnja 1 zauzima prvih n − 1 prospojnikastupnja 2, a n− 1 ulaza stupnja 3 da zauzima idućih n− 1 prospojnika stupnja2. posljedično, u stupnju dva treba biti još jedan prospojnik preko kojega će seostvariti prospajanje n-tog ulaza i izlaza stupnja 1 i 3. Dakle, broj prospojnikau stupnju 2 je 2n− 1. Ukupni broj presjecišta je:
L = 2Nk + k
(N
K
)2
.
Uz prikladan broj ulaza u prospojnike u 1. stupnju n i broj prospojnika udrugom stupnju k može se značajno reducirati broj prospojnika u odnosu napravokutnu mrežu s N2 prospojnika. Veliki komutatori rade s malom vjerojat-nosti blokiranja (tzv. komutatori sa bitno neblokirajućim djelovanjem).
Za razliku od prostornog prospajanja kod koje je N istodobnih veza ostva-reno preko N odvojenih linija (putova), kod vremenskog prospajanja postojisamo jedna linija kroz centralu (jedan prostorni put), a N istodobnih veza je

POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 70
ostvareno periodičkom vremenskom podjelom kao što je to slučaj kod prijenosapodataka s remenskom raspodjelom. Dakle, svakom putu odgovara odgovara-jući vremenski odsječak u kojemu je simbol koji pripada tom putu. S drugestrane, za razliku od prostornog prospajanja kod kojeg je moguće prospajatii analognih i digitalnih signala, vremensko prospajanje je moguće samo za di-gitalne (vremenski diskretne) signale. Prospajanje analognih signala zahtjevaA/D i D/A pretvaranje na ulazu i izlazu iz centrale. Na slici 4.7 prikazana jeshema vremenskog prospajanja.
Slika 4.7: Vremensko prospajanje
Veliki sustavi koriste hibridno rješenje temeljeno na prostornoj i vremenskojraspodjeli, npr. TST (time-space-time - TST) trostupnjevna komutacija je posvojoj arhitekturi slična prostornoj komutaciji u 3 stupnja koja je analizirana uprethodno poglavlju. TST komutacija ima N/n blokova vremenske komutacijena ulazu koji se prostorno komutiraju sa N/n blokova vremenske komutacije naizlazu. Neka je N = 960 ulaznih kanala i N = 960 izlaznih kanala. Za TST uzn = 120 potrebno je 8 ulaznih i 8 izlaznih vremenskih komutatora. Za situacijuneblokiranja treba biti k = 2n − 1 = 239 različitih veza (uz istu prostornuvezu) u prostornom komutatoru. Pošto je N/n = 8, prostorni komutator jeveličine 8x8. Ovo je velika redukcija prema gotovo 106 presjecišta prostornogkomutatora u jednom stupnju ili 168000 za slučaj komutatora sa 3 stupnja. Naslici 4.8 je prikazan primjer vremensko - prostorno - vremenskog prospajanja.
Slika 4.8: Vremensko - prostorno - vremensko prospajanje

POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 71
Prospajanje paketa
U modelu s prospajanjem paketa informacijski tok je podijeljen u pakete odre-đene duljine odnosno određenog broja informacijskih simbola. Paketi se šaljugranama preko čvorova do krajnjih uređaja. Čvor primljeni paket pohranjujeu memoriju i čeka potvrdu od odredišnog čvora da može preuzeti paket. Nataj način je otklonjena potreba za uspostavom stalih veza između čvorova, kaošto je to slučaj kod prospajanja kanala. Da bi se paketi uspješno prospajaliu mreži u zaglavlju paketa su smještene informacije potrebne za usmjeravanje.Ovaj koncept otvara i mogućnost usmjeravanja različitih paketa prema razli-čitim čvorovima, a ovisno o njihovom zauzeću. Na taj način se mrežni resursiefikasnije iskorištavaju u usporedbi s prospajanjem kanala. Postoje dvije metodeprospajanja paketa, metoda virtualnih kanala i metoda metoda prospajanja da-tagrama (datagram metoda).
1. Metoda virtualnih kanala je bliska prospajanju kanala, s razlikom što kodmetode prospajanja kanala ne postoje paketi. Prije slanja paketa koji pri-padaju određenoj vezi, uspostavi se put u mreži kojom se šalju svi paketikoji pripadaju toj vezi. Put se uspostavlja na način da se prvo pošaljepaket s informacijom o zahtjevu za uspostavom veze sa određenim kraj-njim uređajem. Odaslani paket prenese informaciju čvorovima o potrebiuspostave puta te se nakon toga svi paketi koji pripadaju toj vezi u mrežipropagiraju istim putem. Na taj način je uspostavljen virtualni kanal, kojise raskida kada više nema potrebe za prijenosom informacije. Svaki paketu zaglavlju sadrži identifikator virtualnog kanala kojem pripada te se nataj način u čvorovima usmjerava. Na slici 4.9 prikazano je prospajanjepaketa metodom virtualnih kanala.
2. Datagram metoda se ne temelji na unaprijed određenom putu. Svaki pa-ket u čvoru se promatra neovisno o prethodno pristiglim paketima. Iztog razloga, različiti paketi koji pripadaju istoj vezi do krajnjeg uređajamogu doći različitim putevima i različitim redosljedom. Također postojimogućnost da paket i ne dođe do krajnjeg uređaja. S obzirom da u mrežinije unaprijed definiran put, u zaglavlju paketa se nalaze sve potrebneinformacije za usmjeravanje prema krajnjem uređaju. Datagram metodaprospajanja je što se ne mogu pojaviti zagušenja u granama, i ako nekičvor izgubi funkcionalnost paketi se usmjeravaju preko ostalih funkcional-nih čvorova. U datagram metodi veza se puno brže uspostavlja, što ovumetodu prospajanja čini vrlo prikladnom za prijenos kraćih poruka kojeimaju svega nekoliko paketa. Na slici 4.10 prikazano je prospajanje paketadatagram metodom.
Prednost metode prospajanja virtualnih kanala pred datagram metodomje u bržem usmjeravanju, s obzirom da su putevi unaprijed definirani, te
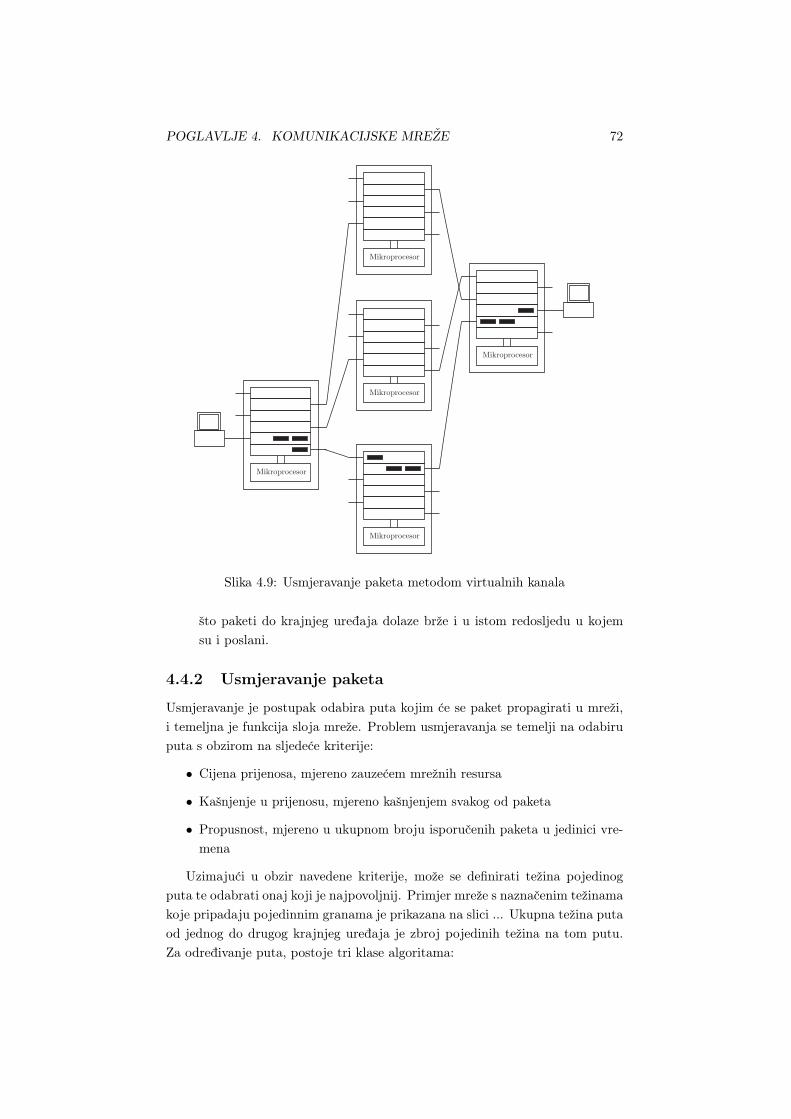
POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 72
Slika 4.9: Usmjeravanje paketa metodom virtualnih kanala
što paketi do krajnjeg uređaja dolaze brže i u istom redosljedu u kojemsu i poslani.
4.4.2 Usmjeravanje paketa
Usmjeravanje je postupak odabira puta kojim će se paket propagirati u mreži,i temeljna je funkcija sloja mreže. Problem usmjeravanja se temelji na odabiruputa s obzirom na sljedeće kriterije:
• Cijena prijenosa, mjereno zauzećem mrežnih resursa
• Kašnjenje u prijenosu, mjereno kašnjenjem svakog od paketa
• Propusnost, mjereno u ukupnom broju isporučenih paketa u jedinici vre-mena
Uzimajući u obzir navedene kriterije, može se definirati težina pojedinogputa te odabrati onaj koji je najpovoljnij. Primjer mreže s naznačenim težinamakoje pripadaju pojedinnim granama je prikazana na slici ... Ukupna težina putaod jednog do drugog krajnjeg uređaja je zbroj pojedinih težina na tom putu.Za određivanje puta, postoje tri klase algoritama:
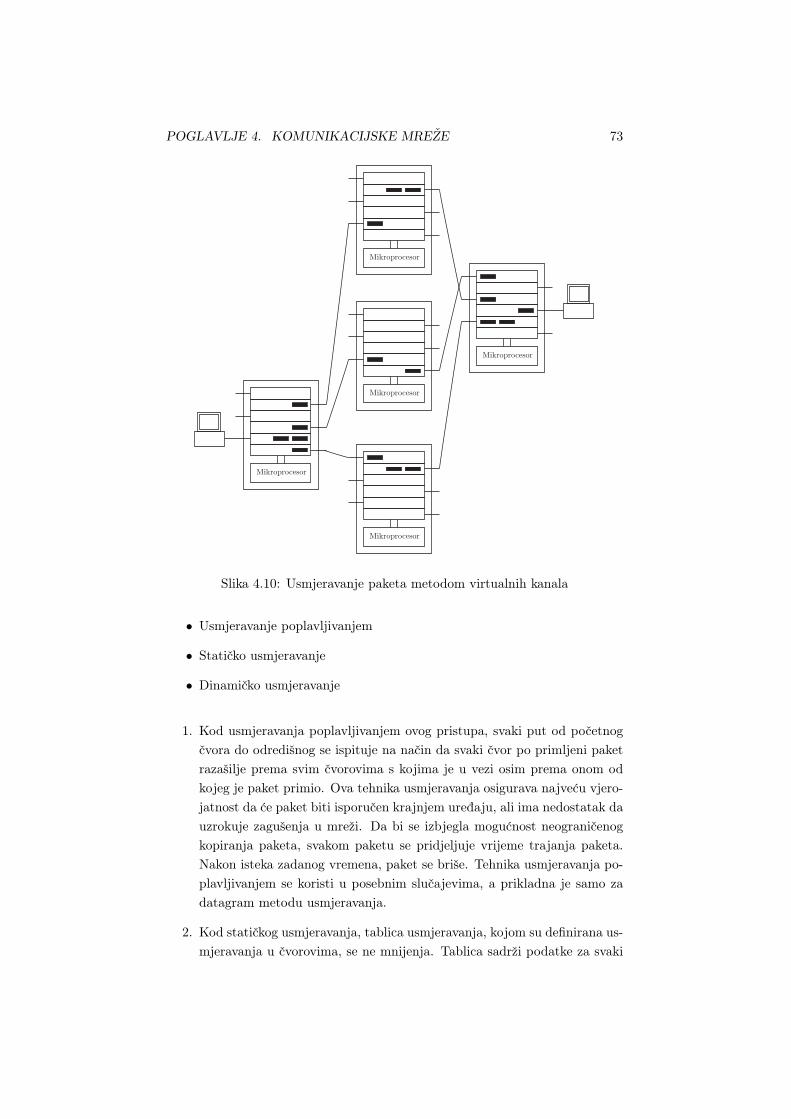
POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 73
Slika 4.10: Usmjeravanje paketa metodom virtualnih kanala
• Usmjeravanje poplavljivanjem
• Statičko usmjeravanje
• Dinamičko usmjeravanje
1. Kod usmjeravanja poplavljivanjem ovog pristupa, svaki put od početnogčvora do odredišnog se ispituje na način da svaki čvor po primljeni paketrazašilje prema svim čvorovima s kojima je u vezi osim prema onom odkojeg je paket primio. Ova tehnika usmjeravanja osigurava najveću vjero-jatnost da će paket biti isporučen krajnjem uređaju, ali ima nedostatak dauzrokuje zagušenja u mreži. Da bi se izbjegla mogućnost neograničenogkopiranja paketa, svakom paketu se pridjeljuje vrijeme trajanja paketa.Nakon isteka zadanog vremena, paket se briše. Tehnika usmjeravanja po-plavljivanjem se koristi u posebnim slučajevima, a prikladna je samo zadatagram metodu usmjeravanja.
2. Kod statičkog usmjeravanja, tablica usmjeravanja, kojom su definirana us-mjeravanja u čvorovima, se ne mnijenja. Tablica sadrži podatke za svaki
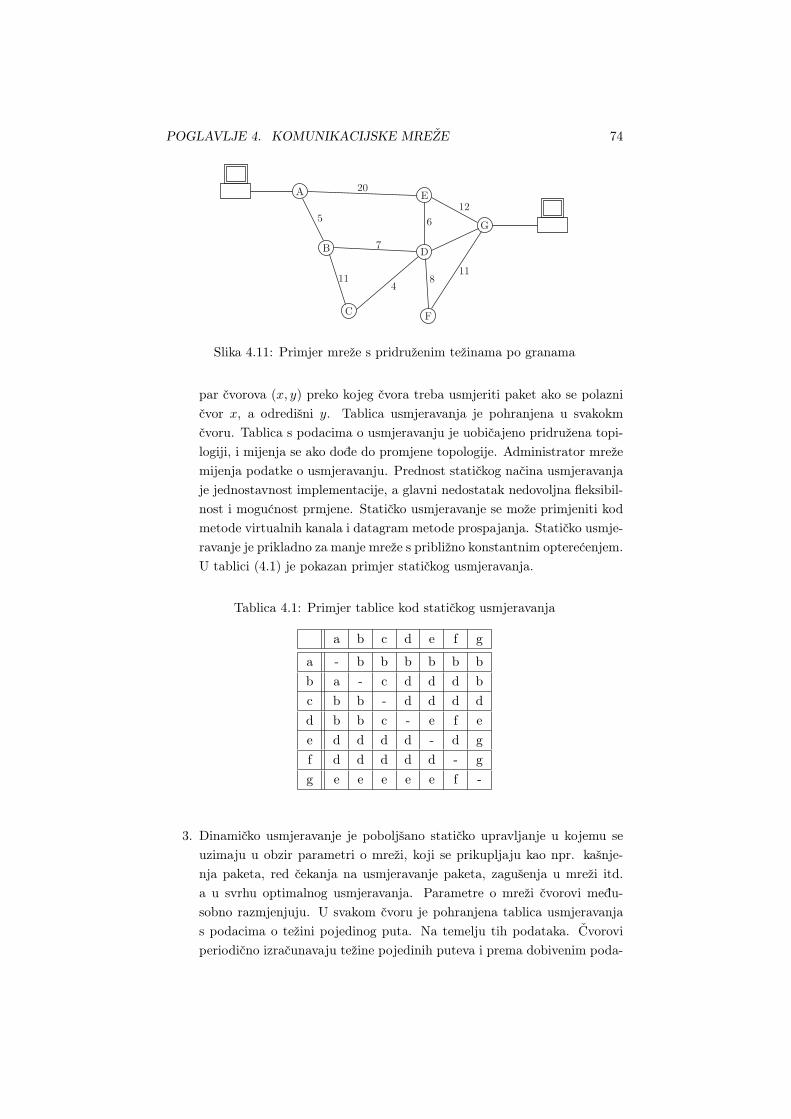
POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 74
Slika 4.11: Primjer mreže s pridruženim težinama po granama
par čvorova (x, y) preko kojeg čvora treba usmjeriti paket ako se polazničvor x, a odredišni y. Tablica usmjeravanja je pohranjena u svakokmčvoru. Tablica s podacima o usmjeravanju je uobičajeno pridružena topi-logiji, i mijenja se ako dođe do promjene topologije. Administrator mrežemijenja podatke o usmjeravanju. Prednost statičkog načina usmjeravanjaje jednostavnost implementacije, a glavni nedostatak nedovoljna fleksibil-nost i mogućnost prmjene. Statičko usmjeravanje se može primjeniti kodmetode virtualnih kanala i datagram metode prospajanja. Statičko usmje-ravanje je prikladno za manje mreže s približno konstantnim opterećenjem.U tablici (4.1) je pokazan primjer statičkog usmjeravanja.
Tablica 4.1: Primjer tablice kod statičkog usmjeravanja
a b c d e f g
a - b b b b b bb a - c d d d bc b b - d d d dd b b c - e f ee d d d d - d gf d d d d d - gg e e e e e f -
3. Dinamičko usmjeravanje je poboljšano statičko upravljanje u kojemu seuzimaju u obzir parametri o mreži, koji se prikupljaju kao npr. kašnje-nja paketa, red čekanja na usmjeravanje paketa, zagušenja u mreži itd.a u svrhu optimalnog usmjeravanja. Parametre o mreži čvorovi među-sobno razmjenjuju. U svakom čvoru je pohranjena tablica usmjeravanjas podacima o težini pojedinog puta. Na temelju tih podataka. Čvoroviperiodično izračunavaju težine pojedinih puteva i prema dobivenim poda-

POGLAVLJE 4. KOMUNIKACIJSKE MREŽE 75
cima mijenjaju tablicu usmjeravanja. Za izračun putaizmeđu dva čvora,koriste se graf algoritmi za optimizaciju. U tablici (??) je pokazan primjerdinamičkog usmjeravanja.
Prednosti dinamičkog usmjeravanja je u mogućnosti poboljšanja perfor-mansi i smanjenja zagušenja biranje povoljnijeg puta. Nedostatak je slože-nost implementacije. Usprkos složenoti, dinamičko usmjeravanje se inten-zivno koristi zbog prednosti koje ima u odnosu na statičko usmjeravanje.Dinamičko usmjeravanje se može primjeniti kod metode virtualnih kanalai datagram metode prospajanja.
Tablica 4.2: Primjer tablice kod dinamičkog usmjeravanja
a b c d e f g
Od čvora d b b c - e f eTežine 7 7 4 0 6 8 6















![SVEUČILIŠTE U SPLITU FAKULTET ELEKTROTEHNIKE, … rad_Filip Grubišić... · 4 Slika 2.1. - Fotonaponski (FN) modul i njegovi dijelovi [7] FN modul u eksploataciji nalazi se u pravilu](https://img.dokumen.tips/doc/110x75/5e032e46d9e2ea2f2042223c/sveuoeilite-u-splitu-fakultet-elektrotehnike-radfilip-grubii-4-slika.jpg)







![SVEUČILIŠTE U SPLITU FAKULTET ELEKTROTEHNIKE, … rad_Krolo-cea4228354.pdf · taljenje, koji u ovom slučaju iznosi 33%) [1]. Za dok je za dobivanje jedne tone recikliranog](https://img.dokumen.tips/doc/110x75/5e5c902aaf5db04d1732eb56/sveuoeilite-u-splitu-fakultet-elektrotehnike-radkrolo-taljenje-koji-u-ovom.jpg)





