Embed Size (px)
Citation preview

Simulation of Payload Vibration Protection by ShapeMemory Alloy Parts
Aleksandr E. Volkov, Margarita E. Evard, Kristina V. Red�kina, Andrey V. Vikulenkov, Vyacheslav P. Makarov, Aleksandr A. Moisheev, NikolayA. Markachev, and Evgeniy S. Uspenskiy
(Submitted October 10, 2013; in revised form April 29, 2014)
A system of vibroisolation under consideration consists of a payload connected to a vibrating housing byplane shape memory alloy (SMA) slotted elements. The calculation of the mechanical behavior of the SMAis based on a microstructural theory. Simulations of harmonic and of impact excitations are carried out.The results have shown that protective properties of this system depend on the SMA state. The maximumreduction of the acceleration amplitude for harmonic excitation is reached when the SMA is in the mar-tensitic (pseudo-plastic) state or in the two-phase state. A variation of temperature allows changing theresonance frequency and thus escaping from the resonance and controlling a mode of vibration.
Keywords aerospace, shape memory alloys, simulation,vibroisolation
1. Introduction
The problem of vibration protection always arises whensome critical device (payload) is located on an apparatusproducing vibrations. This problem may be solved by con-necting such device to a vibrating part by a vibroisolating bondwith a low stiffness. This method is generally referred to asvibroisolation. When the excitation vibration frequency ex-ceeds some typical value, which may be called a cutofffrequency, the acceleration amplitude of the payload will beless than that of the excitation, in other words, the vibrationswill not penetrate into the isolated body. This is the regime ofisolation. Below the cutoff frequency there always exists aresonant frequency, from which a passive vibroisolation systemcannot protect. In this case, high damping materials can helpmitigating vibrations with a frequency equal or less than theresonant one. Then, the vibration protecting system is operatingin the mode of damping. Switching between regimes ofvibroisolation and damping can be reached by changing thestiffness of a system. Mechanical properties of SMA stronglydepend on the temperature so these materials hold muchpromise for semi-active vibration protection. Advantages ofSMA are a high damping ability, which helps to dissipate the
energy of vibrations, and the possibility to control the stiffnessby variations of temperature. All this opens up possibilities indesigning of controlled semi-active dampers and isolators.
A theoretical simulation of a SMAvibroisolation is helpful fordeveloping practical applications. Since a SMA in an antivibra-tion device experiences a complicated action of variable stressand temperature, for the description of its mechanical behavior itis expedient to choose a microstructural model based on theconsiderations of the structure of the phases and of the physics ofthe transformation fromone phase into the other. Suchmodels areproposed by Patoor (Ref 1), Sun and Lexcellent (Ref 2), Huangand Brinson (Ref 3). The present work uses the microstructuralapproach (Ref 4), further development of which was described in(Ref 5). Earlier this model was successfully applied forcalculation of the deformation of an SMA suspension used asan element of active, semi-active and passive vibration controlsystem (Ref 6); for simulation of structure protection fromearthquakes (Ref 7); for modeling of vibration isolation by twohelical SMA springs (Ref 8).
2. Constitutive Equations of the MicrostructuralModel
In this microstructural model, two structural levels areconsidered. The representative volume of SMA on the macro-scopic consists of grains differing by their crystallographicorientations x. We suppose that for the description of thedeformation the infinitesimal strain tensor e can be used. Thedeformation of the representative volume is calculated byneutralization of the deformations egr of the grains with anassumption that spatial averaging can be replaced by orienta-tion averaging:
e ¼X
f ðxÞegrðxÞ; ðEq 1Þ
where f(x) is the volume fraction of grains with orientationx, and the sum is extended over all grain orientations. Insideeach grain, one distinguishes the austenitic phase and N
This article is an invited paper selected from presentations at theInternational Conference on Shape Memory and SuperelasticTechnologies 2013, held May 20-24, 2013, in Prague, CzechRepublic, and has been expanded from the original presentation
Aleksandr E.Volkov,Margarita E. Evard, andKristinaV. Red�kina,Saint Petersburg State University, Saint Petersburg, Russia; andAndreyV. Vikulenkov, Vyacheslav P. Makarov, Aleksandr A. Moisheev,NikolayA.Markachev, andEvgeniy S. Uspenskiy, Lavochkin Scienceand Production Association, Khimki, Russia. Contact e-mails:[email protected] and [email protected].
JMEPEG �ASM InternationalDOI: 10.1007/s11665-014-1084-7 1059-9495/$19.00
Journal of Materials Engineering and Performance

domains (crystallographically equivalent orientation variants)of the martensitic phase. Thus, the grain deformation tensoris obtained by averaging
egr ¼ ð1�UgrÞeA þ 1=Nð ÞX
nUnen; ðEq 2Þ
where (1/N)Un is the volume fraction of the nth variant ofmartensite, Ugr ¼ 1=Nð Þ
Pn Un is the total volume fraction
of martensite in the grain, eA and en are deformation tensorsof austenite and of the nth variant of martensite. A veryimportant problem for estimation of the life of SMA actuatorsand dampers is the calculation of damage accumulation andfatigue (Ref 9, 10). A description of these phenomena can bedone in the frames of the microstructural approach by intro-ducing special parameters (Ref 11). Still, in many applica-tions, the design envisages a relatively low level of stresses,when plastic deformation and damage accumulation can beneglected. This assumption is made in the present work. Wealso neglect the differences between the elastic moduli andbetween the heat expansion coefficients of austenite and mar-tensite. With these assumptions, the total deformation tensorof any volume can be resolved into elastic ee, thermal eT, andphase ePh (due to the phase transformation) components. Foreach grain we write:
egr ¼ ee þ eT þ ePh: ðEq 3Þ
The phase deformation ePh of a single martensite variantequals to the Bain�s deformation Dn . The phase deformation ofa grain on the whole is the average over the martensite variants:
ePh ¼ 1=Nð ÞX
nUnðxÞDn: ðEq 4Þ
Thus, to find the deformation one must know the values ofthe internal parameters Un(x), which vary when the transfor-mations is going on. We start from the thermodynamic Gibbs�potential G . For a unit volume
G ¼ Geig þ Gmix; Geig ¼ ð1� UgrÞGA þ 1
N
XN
n¼1UnG
Mn ;
Gmix ¼ ðl=2ÞRnU2nðl ¼ constÞ;
ðEq 5Þ
where GA, GnM, Geig are the eigenpotentials of austenite, mar-
tensite, and of their mixture; Gmix is the potential of the inter-action between the phases (in this work we use the simplestexpression for Gmix). The condition of the transformation isformulated in terms of the generalized thermodynamic forces.For a generalized coordinate Un, the force is defined asFn ¼ �N @G
@Un. Then one obtains:
Fn ¼ F tn þ Fmix
n ; F tn ¼ �
@Geig
@Un� q0
T � T0T0
þ r : Dn;
Fmixn ¼ � @G
mix
@Un¼ �lUn:
ðEq 6Þ
Here F tn is the thermodynamic driving force dependent on
temperature T and stress r, Fmixn is the opposing force, T0
and q0 are the latent heat and the phase equilibrium tempera-ture, l is a material constant. Since a temperature-phase hys-teresis exists, one concludes that the transformation occurs inconditions apart from the equilibrium. So, we formulate thecondition of the transformation in the form:
Fn ¼ �Ffr; ðEq 7Þ
where Ffr is a material constant—the ‘‘friction force,’’ whichacts similarly to a dry friction force and is responsible for thetemperature-phase hysteresis, sign ‘‘+’’ is taken for the directand ‘‘�‘‘ for the reverse transformation. Constants Ffr and lare related to the characteristic temperatures and the latentheat of the transformation. From this condition, one canestablish the evolution equation for the internal parametersUn(x):
dUn ¼ ð1=lÞdFtn H Fn � F fr
� �H 1� Ugrð ÞH dF t
n
� ��
þH �Fn � F fr� �
H Unð ÞH �dF tn
� ��:
ðEq 8Þ
Here, H(x) is Heaviside function.A special approach is used to describe the reorientation
(twinning) of martensite. We accept three hypotheses: (1) anyvariant of martensite can be transformed in any other variant;(2) reorientation occurs along the direction in the spaceU1,…,UN, which corresponds to the fastest decrease of theGibbs� potential; (3) reorientation starts when the thermody-namic force reaches some critical value. To find the direction of
the reorientation, we use vector F ¼ � @G@U1
; . . . ;� @G@UN
n oand
take its projection L onto plane U1 +ÆÆÆ+UN = const. Then, if forsome n it holds that Un = 0 and Ln < 0 we substitute L for itsprojection L¢ onto intersection of planes Un = 0 andU1 +ÆÆÆ+UN = const, repeating this procedure for other compo-nents of Ln if necessary. Finally we obtain the direction l, whichdoes not lead to a violation of conditions Un > 0, n = 1,…,N.For this direction, we postulate the condition of reorientation:
F tw lð Þ ¼ F frtw;F tw lð Þ ¼ � @G@l¼ �
X
k
lk@G
@k¼X
k
lkFk
ðEq 9Þ
where Ffr tw is a constant, characterizing the critical drivingforce for reorientation. From hypotheses 1, 2 it follows thatthe increments dUn are proportional to ln :
dUn ¼ lndu; ðEq 10Þ
where the proportionality factor du is to be found from con-dition (9).
Formulas (1)–(10) make up a set of relations of themicrostructural model allowing to simulate the deformationtensor e of a shape memory alloy body under given variationsof the stress tensor r and temperature T, i.e., they establishrelations, which formally may be written as:
de ¼ f1 T ; dT ;r; dr;Xð Þ; dX ¼ f2 T ; dT ;r; dr;Xð Þ;ðEq 11Þ
where X denotes the set of internal parametersU1(x),…,UN(x) for all martensite variants in grains with allorientations x. One of the advantages of this microstructuralmodel is that it accounts for the tension-compression asym-metry without any additional assumptions (Ref 12) as thisasymmetry is the consequence of the specific structure of theBain�s deformation tensor. The material constants used in thismodel are the elastic moduli, heat expansion coefficient,Bain�s deformation tensor D, phase thermodynamic equilib-rium temperature T0. Constants Ffr and l are calculated fromthe values of the characteristic temperatures of the transfor-mation and its latent heat. There is one adjustable constant
Journal of Materials Engineering and Performance

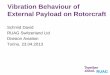
Ffr tw . The values of the material constants specifying theelastic, thermal, and phase deformation of SMA were chosento reproduce the mechanical behavior of the equiatomic TiNiSMA. For a specific TiNi composition they were determinedin calorimetric and mechanical tests. For calculation, the fol-lowing values were used: the characteristic temperatures ofthe transformation Mf = 304 K, Ms = 319 K, As = 345 K,Af = 358 K, the latent heat of the transformationq0 = �160 MJ/m3. The matrix of the lattice deformation Dwas taken from work (Ref 13). The stress-strain diagrams ofSMA deformation in tension for temperatures 273, 350, and380 K, corresponding to the martensitic, two-phase and au-stenitic states calculated by integrating the Eq. (11) are pre-sented in Fig. 1.
One can see that the simulation reproduces the typical forTiNi SMA pseudoplastic behavior at 273 K when the alloy is inthe martensitic state and pseudoelastic behavior at 380 K whenit is in the austenitic state. The lowest level of the stress causingunelastic deformation is for the SMA in the two-phase state.This is completely in agreement with the well-known exper-imental data (for example, Ref 14, 15).
3. Mechanical Model
The vibroisolation system under consideration consists oftwo flat disk-shaped SMA springs with concentric slots (Fig. 2)and a payload imitator with mass m. For simplicity we supposethat when a force F is applied to the center of the spring each ofits circular rings experiences pure bending by a moment, thethickness distribution of the normal stress is linear, twisting andstretching of the rings as well as tensioning of the bridgesconnecting the rings can be neglected. Finite elementsmodeling of the deformation has been carried out by theANSYS simulation software for an elastic slotted spring. Therewere 11372 Solid187 3D elements with 10 nodes, each nodehaving 3 degrees of freedom. The results presented on Fig. 3show that the bent shape of a ring with radius R can be wellapproximated by a three-dimensional curve specified byequations x = Rcosu, y = Rsinu, z = acos2u, where the z-axisof the Cartesian coordinate system is normal to the plane of thering, the x-axis passes through a bridge by which the ring isconnected to an inner part of the spring, u is the azimuth anglein the xy-plane read from the x-axis, a is a parameterdetermining the degree of bending.
We supposed that this curve can satisfactorily approximatethe shape of a ring when it experiences not only elastic
deformations but also deformations due to the phase transfor-mation. With these assumptions one can establish the relationbetween the displacement u(i), generated by ith bent ring andthe maximum strain e(i) of its outer fiber,
u ið Þ ¼ kðiÞu e ið Þ; ðEq 12Þ
where ku(i) is the maximum curvature of the ith ring neutral
axis, which is reached at u = 0 and u = p/2. From the abovementioned approximation of the ring shape one finds:
k ið Þu ¼ R2
ðiÞ=h;
R(i) is the radius of the ith ring, and h is the thickness of thespring. The displacement u produced by the whole spring onefinds summing up the contributions (1) of all rings:
u ¼ R ið ÞkðiÞu e ið Þ ðEq 13Þ
The above assumptions also lead to an expression for themaximum normal stress r(i) which is reached at the same pointswith u = 0 and u = p/2:
r ið Þ ¼ k ið Þr F; k ið Þ
r ¼ 3RðiÞ= 2bðiÞh2
� �; ðEq 14Þ
where b(i) is the width of the ith ring. A solution of this prob-lem is given in (Ref 16). To avoid solving the complicatedboundary-value problem for a SMA slotted spring, we sup-posed that its functional behavior as a whole is determinedby that of its mostly strained regions. Formulae (13) and
(a)0 1 2 3
0
100
200
300273 K
strain, % strain, % strain, %
stre
ss, M
Pa
(b)0 1 2 3
0
100
200
300
350K
stre
ss, M
Pa
(c)0.0 0.2 0.4 0.6 0.8
0
100
200
300380 K
stre
ss, M
Pa
Fig. 1 Calculated stress-strain diagrams of the SMA in the martensitic (a), two-phase (b) and austenitic state (c)
Fig. 2 Scheme of the flat slotted spring with two circular rings
Journal of Materials Engineering and Performance

(14) provide relations between the strain and the stress inthese regions and the displacement produced by the slottedspring and the force applied to it. Addition of the constitutiveequations described in Sect. 2 close the system of equations.Note that with the made assumptions the tensor formulationof the constitutive model is redundant, since with the madeassumptions 1D constitutive relations would be sufficient.
Figure 4 presents notations of the displacements and forcesin the vibroprotection unit. Two flat slotted springs are fixed toa housing at the points A1, B1, A2, B2. At the points C1 and C2
by means of a shaft they are connected with an inertial mass m.In the undeformed state the springs settle down along thedashed lines A1B1 and A2B2, while in the general position—along arcs A1C1B1 b A2C2B2, so that the displacements atpoints C1 and C2 are
u1 ¼ x1�x10; and u2 ¼ x2�x20: ðEq 15Þ
The simulation was carried out for the following stages.The first stage: cooling from a starting temperature Tstart >
Ms down to the test temperature. This stage is needed since thenatural initial state of a SMA is the austenitic high-temperatureunstressed state, since under these conditions the volumefractions of all martensite variants are equal to zero.
The second stage: preliminary deformation of both springsby changing the distance between them from the initial value l0
to the final value l setting the displacements in the slottedsprings to u1|t = 0 = –(l�l0)/2, u2|t = 0 = (l�l0)/2. After thepreliminary deformation, we fix the distance l = C1C2
The third stage—imposing one of the two excitations atpoints x1 and x3:
(1) Harmonic displacement parallel to the x-axis of thepoints A1, B1, A2, B2
x10 ¼ x10jt¼0 þ x0asinðxtÞ; x20 ¼ x20jt¼0 þ x0asinðxtÞ;ðEq 16aÞ
where x10|t = 0 and x20|t = 0 are values of the coordinates x10and x20 at t = 0, x0a is the amplitude of the external vibra-tions;(2) A trapeziform acceleration impulse at the points A1, B1,
A2, B2
d2x10dt2¼ d2x20
dt2¼
amt=t1; 0< t < t1am; t1 < t < t2am � amðt � t2Þ=t1; t2 < t < t1 þ t2;0; t > t2
8>><
>>:
ðEq 16bÞ
where am is the maximum value of the acceleration, t1 andt2—constants determining the position and slope of the impulsepeak. From (16a) and (16b) one obtains that Dx10 = Dx20 (thehousing follows the external excitation as a whole). Then, sincethe distances x2�x1 = l, x2�x = l /2 and x�x1 = l /2 betweenthe springs and the payload during vibrations are constant and,therefore Dx1 = Dx2 = Dx, from (4) it follows that
Du1 ¼ Du2 ¼ Dx�Dx10: ðEq 17Þ
Keeping in mind that the slotted spring for practicalapplications should be thin (in this work h = 0.5 mm), wesupposed that the temperature can be considered homogeneousas a prescribed parameter. Simple estimations show that arelease of the latent heat due to a complete transformation inTiNi in adiabatic conditions leads to a temperature raise byapproximately 40 K. The temperature changes were experi-mentally observed in (Ref 17). For specific value of the heatconductivity of TiNi, we estimated that the time needed to heator cool the spring by 100 K was about 0.1 s. Thus, the outflow
(b)0 45 90
-0.03
0.00
0.03
disp
lace
men
t, m
m
ϕ, degrees
FEMz = a cos 2ϕ
(a)
Fig. 3 Displacement chart on an axonometric view (a) and dependences of the displacement on the azimuth angle u obtained by FEM andfrom the approximation formula (b)
Fig. 4 Coordinates, displacements and forces in the elements of thevibroprotection unit
Journal of Materials Engineering and Performance

of the additional latent heat takes little time. For this reason, weassumed that the effect of the absorption (release) of the latentheat in the conditions under consideration can be neglected.
From the motion equation of the payload
mx:: ¼ �F1 � F2 þ Ffr
for a time increment Dt one can find the increments of thevelocity Dv and of the coordinate Dx
Dv ¼ Dt � �F1�F2 þ Ffrð Þ=m; ðEq 18aÞ
Dx ¼ Dt � ðvþ DvÞ; ðEq 18bÞ
where F1 and F2 are forces applied to the springs A1C1B1 bA2C2B2 from the side of the payload, Ffr is the force due tothe internal and external friction. Since the amplitude indepen-dent internal friction is due to small reversible motions of thecrystal structure defects including dislocations, phase bound-aries and martensite domain boundaries, it is not described bythe considered SMA constitutive model and should be takeninto account indirectly. On the contrary, dissipation due towork of the stresses on unelastic deformations (energy losseson the stress-strain hysteresis) are calculated within the consti-tutive model. We assume that the amplitude independent inter-nal friction and the external friction are viscous, so that Ffr =–mfrv, where the coefficient of viscosity mfr can be related tothe experimental values of the internal friction Q�1 for mar-tensitic and austenitic phases and the coefficient of viscosityfor external friction. An estimation based on these consider-ations gave the approximate value mfr = 0.01 N/(m/s).
From the formula (13) it follows that the increments Du1 andDu2 can be expressed as the sums of the contributions producedby all rings of the first and of the second SMA springs:
Dup ¼ R ið ÞkðiÞupDe ið Þ
p ; p ¼ 1; 2; ðEq 19Þ
where the subscript p = 1, 2 is the number of the SMAspring. The relation between the increments of the deforma-tion Dep
(i) and of the stresses Drp(i) in each ring of both SMA
springs was calculated by means of the microstructural mod-el. Applying functions (11) to each ring of each SMA spring,i.e., for all values of indexes p and (i) one gets
De ið Þp ¼ f1ðT ;DT ;r ið Þ
p ;Dr ið Þp ;X
ðiÞp Þ; ðEq 20aÞ
DX ið Þp ¼ f2ðT ;DT ;r ið Þ
p ;Dr ið Þp ;X
ðiÞp Þ; ðEq 20bÞ
where f1 and f2 are functions specified by the microstructuralmodel. Substituting (13) in (19) and the result in (17), onearrives at the equations
Dx ¼ Dx10 þ R ið ÞkðiÞup f1ðT ;DT ;r ið Þ
p ; kið Þ
r DFp;XðiÞp Þ; p ¼ 1; 2
ðEq 21Þ
Equations (21) specify implicitly dependences up of theincrements DFp of the forces applied to the SMA springs on theincrement Dx of the displacement of the payload:
DFp ¼ upðT ;DT ;Dx;Dx10Þ; p ¼ 1; 2 ðEq 22Þ
Thus, knowing the law of the vibration x10(t) given byformula (16) and the law of the temperature variation T(t) oneintegrates the system of Eqs 18, 22, and finds the payloadvibrations x(t).
4. Results of the Simulation
The SMA springs with thickness h = 0.5 mm were sup-posed to consist of two rings with the widths b(i) = 2 and3 mm, and radiuses R(i) = 7 and 13.5 mm. All calculationswere made for payload imitator mass m = 2.2 kg. The coeffi-cient of viscous friction mfr = 0.01 N/m/s. Modeling wascarried out for temperatures 273, 350, and 380 K, correspond-ing to the martensitic, two-phase and austenitic states. Forsemiactive vibration control, the temperature of the slottedsprings was varied remaining homogeneous.
4.1 Harmonic External Vibrations
The amplitude of the harmonic external vibrations during allmodel experiments was 2 mm.
Figure 5 shows the calculated diagrams of the steady-statevibrations at 273 K. It is evident that at the resonant frequencythe amplitude of the forced vibrations is higher than that of theexcitation and the SMA springs work in the regime of damping.At frequencies higher than some value (the cutoff frequency)the regime of vibroisolation takes place and the vibrations do
4.0 4.5 5.0-8
-4
0
4
273K, 7 Hzpayload vibrationsexternal vibrations
disp
lace
men
t, m
m
time, s4.0 4.5 5.0
-2
0
2
payloadvibrations external vibrations273K, 14 Hz
disp
lace
men
t, m
m
time, s
Fig. 5 Vibrograms of the external vibrations and forced vibrations of the payload at 273 K for the frequencies of the external oscillations nearthe resonance frequency (7 Hz) and above the resonance frequency (14 Hz)
Journal of Materials Engineering and Performance

not penetrate to the payload, so that it vibrates with amplitudeless than that of the excitation.
The performance of the vibro-protection system can becharacterized by the ratio of the maximum accelerationamplitude of the payload to that of the excitation. Similarlythe displacement ratio is introduced. These ratios depend on theworking temperature and on the preliminary deformation of theSMA springs (Fig. 6). From the graphs shown on Fig. 6, it iseasy to determine the values of the resonant and cutofffrequencies. Additional information explaining the behavior ofthe vibrating system is provided by Fig. 7 showing the stress-strain diagrams of the SMA in the most deformed regions of theslotted springs. One can see that when there is no pre-strain ofthe springs the deformations corresponding to the displace-ments of the payload to the left and to the right are more
5 10 15 200
1
2
3
without pre-strain pre-strain 5 mm273K
frequency, Hz
acce
lera
tion
ratio
5 10 15 200
1
2
3
withour pre-strainpre-strain 5 mm
disp
lace
men
t rat
ion
273 K
frequency, Hz
5 10 15 200
1
2
without pre-strain pre-strain 5 mm
disp
lace
men
t rat
io
350 K
frequency, Hz
5 10 15 200
1
2
350 K without pre-strain pre-strain 5 mm
acce
lera
tion
ratio
Fig. 6 Dependences of the acceleration and displacement ratios on the excitation frequency for working temperatures 273 and 350 K
-0.5 0.0 0.5
-200
0
200350K, 7Hz
stre
ss, M
Pa
strain, % strain, % strain, %-1.5 -1.0 -0.5 0.0 0.5
-400
-200
0
200350K, 7Hz, pre-tension 5 mm
stre
ss, M
Pa
-0.5 0.0 0.5 1.0 1.5-200
0
200
400 350K, 7Hz, pre-tension 5 mm
stre
ss, M
Pa
(a) (b) (c)
Fig. 7 Stress-strain diagrams of the SMA in the most deformed regions of slotted springs: (a)—spring without pre-tension, (b)— pre-strainedspring compression region, (c)—pre-strained spring tension region
250 300 350 400 4505
10
15
Mf
Ms
Af
fcutofffresonant
freq
uenc
y, H
z
temperature, K
As
Fig. 8 Dependence of the resonant and cutoff frequencies on tem-perature. Mf, Ms, As, Af—characteristic temperatures
Journal of Materials Engineering and Performance

symmetric than when a pre-strain is specified: in this case, theSMA material deformation is mostly one-sided. Then, themechanical energy dissipation is bigger and the efficientmechanical module (ratio of the maximum stress to themaximum strain) is less. Both phenomena result in the shiftof the resonant and the cutoff frequencies to lower values.
The fact that the mechanical behavior of the SMA stronglydepends on the temperature leads to a temperature dependenceof the SMA spring stiffness and hence of the resonant and thecutoff frequencies. Analysis of these dependencies for theconsidered SMA showed on Fig. 8 allows concluding that onecan control the vibrations by variation of temperature. Fig-ure 9a presents an example of escaping from the resonance:heating transforms SMA parts into austenite thus driving theresonance frequency upward so that the formerly near-resonantexcitation frequency 6 Hz appears to be below the resonanceand the vibroprotection unit passes to damping regime.Figure 9b illustrates a transition from a near-resonant vibrationwhen the SMA parts are in the austeninic state to isolationregime at cooling.
4.2 Impulse Loading
The simulation was made at different temperatures withfollowing parameters of the acceleration impulse: am = 10m/s2; t1 = 0.005 s, t2 = 0.015 s. Figure 10 shows the timedependences of the payload and external accelerations at theimpact excitation. One can see that the most effectivevibroisolation takes place when the SMA elements are in thetwo-phase state (Fig. 10b).
5. Conclusions
Shape memory alloys are suitable materials for vibrationprotecting systems. They open up possibilities for passive andsemi-active vibration control. The variation of stiffness due tothe phase transformation causes the change of the cutoff andresonance frequencies of the vibrating system, which permits tocontrol the vibration regime and to switch between thevibroisolation and damping modes of vibrations. It is shownthat the use of such parts in two-phase state allows obtaining agood isolation of the payload both from harmonic and impactexcitations.
The considered SMA flat slotted elements can be success-fully used in vibroprotective parts.
References
1. E. Patoor, A. Eberhardt, and M. Berveiller, Micromechanical Model-ling of Superelasticity in Shape Memory Alloys, J. De Phys. IV, 1996,C1(6), p 277–292
2. Q.-P. Sun and C. Lexcellent, On the Unified MicromechanicsConstitutive Description of One-Way and Two-Way Shape MemoryEffects, J. De Phys. IV, 1996, C1(6), p 367–375
3. M. Huang and L.C. Brinson, A Multivariant Model for Single CrystalShape Memory Alloy Behaviour, J. Mech. Phys. Solids, 1998, 46(8),p 1379–1409
4. M.E. Evard and A.E. Volkov, Modeling of Martensite AccommodationEffect on Mechanical Behaviour of Shape Memory Alloys, J. Eng.Mater. Technol., 1999, 121, p 102–104
(a) (b)8 10 12 14 16 18 20 22 24
-4
-2
0
2
4
disp
lace
men
t, m
m
time, s
mass displacement external vibrations (6 Hz)
400
600
temperature
tem
pera
ture
, K
8 10 12 14 16 18 20 22 24
-10
0
10
400
600
disp
lace
men
t, m
m
time, s
payload displacement external vibrations (9 Hz)
tem
pera
ture
, K
temperature
Fig. 9 Time dependences of payload displacement, caused by 6 (a) and 9 (b) Hz harmonic displacement of the housing under temperaturechange from 340 to 420 K (a) and from 420 to 340 K (b)
(a)0 2 4 6
-10
-5
0
5
10
acce
lera
tion,
m/s
2
acce
lera
tion,
m/s
2
acce
lera
tion,
m/s
2
time, s time, s time, s
payload acceleration
external acceleration
(b)0 2 4 6
-10
-5
0
5
10 payload acceleration
external acceleration
(c)0 2 4 6
-10
-5
0
5
10 payload acceleration
external acceleration
Fig. 10 Time dependences of the payload and impact accelerations for the SMA elements in martensitic (a), pseudoelastic (b), and austenitic(c) states
Journal of Materials Engineering and Performance

5. A.E. Volkov and F. Casciati, Simulation of Dislocation and Transfor-mation Plasticity in Shape Memory Alloy Polycrystals, Shape MemoryAlloys. Advances in Modelling and Applications, F. Auricchio and L.Faravelli, Eds., Barcelona, 2001, p 88–104
6. S.P. Belyaev, I.V. Inochkina, and A.E. Volkov, Modeling of vibrationcontrol, damping and isolation by shape memory alloy parts,Proceedings of 3rd World Conference on Structural Control, F.Casciati, Ed., 2003 (Como), Wiley, 2003, vol. 2., p 779–789
7. A.E. Volkov, M.E. Evard, A.V. Vikulenkov, and E.S. Uspenskiy,Simulation of Vibration Isolation by Shape Memory Alloy SpringsUsing a Microstructural Model of Shape Memory Alloy, Mater. Sci.Forum, 2013, 738–739, p 150–154
8. A.E. Volkov and D.S. Dubilet, Calculation of the Efficiency of ShapeMemory Alloys Application for Damping and Isolation of Structures,J. Compos. Mech. Des., 2009, 15(4), p 505–511
9. G. Eggeler, E. Hornbogen, A. Yawny, A. Heckmann, and M. Wagner,Structural and functional fatigue of NiTi shape memory alloys, Mater.Sci. Eng. A, 2004, 378, p 24–33
10. G. Kang, Q. Kan, Ch Yub, D. Song, and Y. Liu, Whole-LifeTransformation Ratchetting and Fatigue of Super-Elastic NiTi AlloyUnder Uniaxial Stress-Controlled Cyclic Loading, Mater. Sci. Eng. A,2012, 535, p 228–234
11. M.E. Evard, A.E. Volkov, and O.V. Bobeleva, An Approach forModelling Fracture of Shape Memory Alloy Parts, Smart Struct. Syst.,2006, 2(4), p 357–363
12. A.E. Volkov, E.V. Emelyanova, M.E. Evard, and N.A. Volkova, AnExplanation of Phase Deformation Tension-Compression Asymmetryof TiNi by Means of Microstructural Modeling, J. Alloys Compd.,2013, 577(1), p 130–217
13. K.M. Knowles and D.A. Smith, The Crystallography of the MartensiticTransformation in Equiatomic Nickel-Titanium, Acta Metall., 1981, 20,p 101–110
14. S. Miyazaki, K. Otsuka and Y. Suzuki, Transformation Pseudoelasticityand Deformation Behaviour in a Ti-50.6at.%Ni Alloy, Scripta Met.,1981, 15(3), 287–292
15. T. Saburi, T. Tatsumi and S. Nenno, Effect of Heat Treatment onMechanical Behaviour of TiNiAlloys, J. DePhys. 1982, 43, pC4-261-266
16. S. Timoshenko, Strength of Materials, 3rd edn. Part 1. ElementaryTheory and Problems, Krieger Publishing Company, Melbourne(Florida), 1976, 456 p
17. E.A. Pieczyska, H. Tobushi and K. Kulasinski, Development oftransformation bands in TiNi SMA for various stress and strain ratesstudied by a fast and sensitive infrared camera, Smart Mater. Struct. 22,2013. doi:10.1088/0964-1726/22/3/035007
Journal of Materials Engineering and Performance