Embed Size (px)
DESCRIPTION
Uploaded from Google Docs
Citation preview

Chapter 5: SONET/SDH
Reference textbook:
“Understanding SONET/SDH and ATM: Communications Networks for The Next
Millennium” By S1. V. Kartalopoulos

Introduction
“Humans are social animals!” Socializing exchanging ideas and information build
networks to facilitate information exchange and communication Different ways of communication technologies
TelegraphTelephonyDigital electronic technology of various data types
• Telemetry data
• User data
• Video data
• Voice data

Fig. 5.1 Characteristics per service

5.1 Legacy Communications Systems: Concepts
Basic Technology and Services

Pulse-Coded Modulation ( PCM )
Voice : the primary services in the communication industry Voice : analog signal. Words : acoustic waves generated by vibrating vocal cords and the
mouth cavity modulates them into recognizable and distinguishable compounded sounds
Microphone: a transducer converts acoustic waves into (analog) electrical signals
Speaker: a transducer converts (analog) electrical signals into acoustic waves and reproduces voice sounds
POTS ( Plain Old Telephone Service ) Ringing call initiation number dialing Transmits analog signals over the telephone network

Pulse-Coded Modulation ( PCM )
PCM form a binary (or digital) bit stream at 64000 bits/second Also know as Digital Signal level 0 ( DS0 ) (en)Coder : converts analog signal into digital bit steams Decoder : converts digital bit streams into analog signal (voices) CODEC ( coder/decoder ) : periodically samples the analog signal, and based on a
conversion scheme, it translates each sampled value into a binary representation Two major schemes for PCM : -law in United States, -low in Europe Acoustical signal of speaking voice : usually under 3.4 kilocycles per second, or
kilohertz ( 3.4 kHz ) A low-pass filter removes all components of frequency higher than 3.4 kHz By sampling theorem, to truly represent a signal, we must sample at least twice as its
maximum frequency content So PCM CODEC samples at analog voices 8000 times per second, or every 125 ms,
and it converts each sample into 8 bits PCM The total bit rate is 8000 × 8 = 64000 bits / second, or 64 kilobits per second ( 64
Kbps ), this is the rate termed DS0.

Fig. 5.2 Analog to PCM

Fig. 5.3 DS0 rate

Pulse-Coded Modulation ( PCM )
Differential PCM ( DPCM ) , adaptive DPCM ( ADPCM ), and sigma-delta PCM (ΣΔPCM ) : by more sophisticated digital signal processing algorithms to compress the 64 Kbps to 32 Kbps, or 16 Kbps, or even lower than that.
Local loop : a pair of twisted copper wires between user’s equipment ( a POTS telephone ) and the service provider’s equipment, where the CODEC is located. The signal transmitted on a local loop cable is an analog electrical signal.

Time-Division Multiplexing ( TDM )
POTS telephone converts voice signals into an electrical signal The electrical signal is sent over a pair of copper wires to a
communications systems where the CODEC function is performed
The backbone network only transmits digital signals and no analog signals : all-digital communications network
On an all-digital communications network, in addition to digitized voice signals, other digital data can also be transmitted ( raw digital data, encoded video, encoded sound, etc. )

Time-Division Multiplexing ( TDM )
Some digital services on DS0 Digital Data Service ( DDS )
• 56 Kbps for data, 8 Kbps for “in-band” signaling
• Only for the backbone network, not for the end users
Basic Rate Integrated Services Digital Network ( BRISDN or BRI )• Uses two 64 Kbps channels ( channels B ) and a 16 Kbps subrate channel
( channel D )
• Support a combination of voice and/or data services over a single pair of wire
• Modes available for end users :– 2 B channels for voice and a D channel for data
– 1 B channel for voice and a B+D channels for data
– 2 B channels for data and a D channel for signaling
– All channels for data
– Can only be used if both end users has ISDN and the network supports ISDN

Abbreviations :
CCC, clear channel capability;
B = 64 Kbps voice or data channel;
DDS, digital data services;
D = 16 Kbps signaling or data channel
B8ZSB channel ( 2B + D )
64 CCCB-ISDN 64 Kbps
64 CCC
B8ZS
DDS 56 Kbps + 8 Kbps signalling
Frame, bit robbedVoice : 64 Kbps
Format, overhead line code
Source
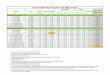
Table 5.1 DS0 Rates and Line Codes

Time-Division Multiplexing ( TDM )
User-to-network interface ( UNI ) : the interface where the user signal, a 64 Kbps data stream ( organized in 8-bit bytes ), first meets the network
At UNI, users’ signals are synchronized with a 8 kHz system clock, or a multiple of it.
Then based on a round-robin principle, the signals are sequentially polled one byte at a time and place one after the other in a fixed order, this is called byte-interleaving.
Time slot : the location of each byte source in this ordered digital signal.
The whole process is called Time-Division Multiplexing ( TDM ).

DS1 Rate
Multiplex 24 DS0 users Each user contributes one byte in a DS1 frame An additional bit, the F-bit, is used as the beginning of a DS1 frame Total 24 × 8 + 1 = 193 bits in 125 s. The bit rate is 193 bits / 125 ms = 1.544 Mbps, knows as the digital
signal level 1 ( DS1 ) rate. M1 multiplexer ( M1 mux ) : function that TDM 24 DS0 into a DS1. The F-bit of each frame forms an F subrate channel in DS1
superframe 12 or 24 frames in each super frame Provide a data link over which the network data are sent Provide error control

Fig. 5.4 DS1 rate – M1 Mux

DS1 Formats
DS1 frame = 24 time slots and the F-bit For primary rate ISDN ( PRI )
23 time slots : 23 B channels ( at 64 Kbps each )1 time slot : for 4 D channels
DS 1 signal Alternate mark inversion ( AMI ), or called bipolar with 8-
zero substitution, a.k.a. bits 8-zero suppression ( B8ZS )B8ZS or more generally, BnZS is used to prevent transmit
long strings of 0’s by the minimum number of 1’s

Table 5.2 DS1 Rate and Line Codes
Abbreviations : SF, superframe; ESF, extended superframe; AMI, alternate mark inversion.
AMIB channel ( 2B + D )
SF, ESFP-ISDN 23B + D
SF, ESF, B8ZSDDS 23 × DS0 + sync + frame
SF, ESF, AMIVoice : 24 × DS0
Format, Overhead Line CodeSource

DS1 Over Long Distnace
DS1 signal is transmitted over a T1 lineOne pair of wires is used for each direction
Communication systems at the DS1 level are designed with an error rate of 10-6 or better.
A regenerator is placed after 3000 ft from user and every 6000 ft between regenerators.
A regenerator every 6000 ft places a maintenance and troubleshooting overhead.

Fig. 5.5 T1 characteristics

xDSL
Digital Subscriber Line ( DSL ) : the local loop ( i.e. the copper twister-pair wires between most homes and the telephone service provider equipment ) in digital form, such as the BRI.
DSL provides 1.544 Mbps and in some cases up to 7 Mbps over existing twisted-pair copper cable.
DSL cannot be used on “loaded” loops, i.e., no inductors or coils on the loop cable.
Effective distance of a DSL depends on the data rate supported1.5 Mbps : several miles25 Mbps : only half a mile
xDSL : “x” refers to one of many DSL formats and rates.

xDSL
VDSL : very high-bit-rate DSL HDSL : high-bit-rate DSL ADSL : asymmetric DSL SDSL : symmetric DSL RADSL : rate adaptive DSL MSDSL : multi-rate symmetric DSL
Build on a single pair of DSL technologyOn unloaded copper pair, can provide 64/128 Kbps up to 8.9
Km, or 2 Mbps up to 4.5 Km DSL requires terminating devices at both ends of the loop, at the
user and at the service provider, to terminate the upstream and downstream digital signals.

Modulations on DSL
Two-bits-to-one quaternary ( 2B1Q ) : Digital PAM with -3, -1, +1 and +3, four possible levels, each represents 2 bits. Its transmitted power is superior to that of AMI Bit rate is limited to 392 Kbps Suitable for upstream transmission on local loos This is used for BRI signals.
Discrete multi-tone ( DMT ) : divides the bandwidth into frequency channels. When a certain channel is detected to have inferior transmission
characteristics, the traffic is assigned another frequency channel, a.k.a. frequency hopping.
The official standard of the ANSI T1E1.r working group Supports upto to 6 Mbps services
• Up to four MPEG-1 compressed video data• A single MPEG-2 compressed video data

Modulations on DSL
Carrierless amplitude phase ( CAP ): a derivative of the quadrature amplitude modulation ( QAM )Translates a 4-bit code in one of the 16 voltage phase pointsMay be viewed as a 2B1Q 2-dimensional approach.Transmitting power is superior to that of AMI and 2B1QEffective bit rate is in the range of 10 – 175 KbpsThe de facto standard that by 1996 was deployed in almost
97% of all ADSL applications.

Table 5.3 Various Modulations on DSLs
180006415001ADSL CAP
1200064060001ADSL CAP
1200017615001ADSL DMT
120007687681HDSL
Single pair
13000204820482HDSL
Two pairs
180001441442ISDN
Max. length in one loop
( in ft )
Upstream bit rate in Kbps
Downstream bit rate in Kbps
# of wires in pairs
Modulations

LVDS
Low-Voltage Differential Signaling ( LVDS ) Once defined for high-speed data transmission over relatively
long cables Now used as a high speed, 155.5 Mbps, low-power general
purpose data transmission technology at the board / bus levels LVDS differential voltage swing is between the voltage levels
VOH = 1.4 V, and VOL = 1.0 V
Scalable Coherent Interface LVDS ( SCI-LVDS )Specified by the IEEE 1596.3 standardFor unidirectional point-to-point links, from a transmitter to
a receiver

1000BaseT
An evolutionary standard derived from the 100BaseT used in LANs.
Working on by the IEEE 802.3ab task force. Allows for transmission of a balanced digital signal at 1 Gbps
over UTP-5 cable for the distance of 100 m. Most of the applications are in the LAN

Coding Schemes
Unipolar : a two-voltage-level signal that typically swings between zero voltage and + V.
Bipolar : a three-voltage-level signal that typically swings between a positive and a negative voltageMay return to zero ( RZ ) or nonreturn to zero ( NRZ ) In a digital bipolar signal, the 1’s alternate between the two
voltages, “+” and “-” and this will result in a zero DC component on the transmission line.
A unipolar and a NRZ bipolar are considered as on-off signalsMay applied to either electrical or optical signals
Multi-level signal : several voltage levels are use

Fig. 5.6 Unipolar and bipolar coding

Coding Schemes
RN and NRZFor both methods, the signal alternates between a positive
( +V ) and a negative ( -V ) voltageLogic “1” : positive voltageLogic “0” : negative voltageFor NRZ, transitions between logic “0” and logic “1”, and
vice versa, are directly crossing the zero voltage levelFor RZ : transitions between logic “0” and logic “1”, and
vice versa, stay temporarily on the zero voltage level

Fig. 5.7 RZ and NRZ coding

Coding Schemes
4B/5B coding : translates 4 bits into one of the 16 predetermined 5-bit codes. The original 4-bit code 0000 is translated to a 5-bit not-all-zero code.
Bipolar Violations ( BV ) Bipolar signal is a 3-level signal where consecutive 1’s in the bit stream
are alternating polarity BV is when two consecutive ‘1s do not change polarity Can be used to detect errors in the bit stream Or used to mark a specific bit manipulation ( coding ) in the bit stream
B8ZS ( bit 8-zero suppression ) : find 8 consecutive 0’s in the bit stream and substitutes them with a bipolar violation At the receiver, BV is detected and the bit stream is restored to its
original form HDB3 : substitueds four 0’s by a code that contains a violation.
At the receiver, BV is detected and the bit stream is restored to its original form

Fig. 5.8 Bipolar and bipolar violation

5.1 Legacy Communications Systems: Concepts
Hierarchical Multiplexing

Multiplexing in North America
24 DS0 signals + a framing F-bit level 1 multiplexer ( M1 ) a DS1 signal
4 DS1 signals + a control C-bit ( for every 48 payload bits ) bit interleaved by a level 1-to-2 multiplexer ( M12 ) a DS2 signal
7 DS2 signals + a control C-bit ( for every 84 payload bits ) bit interleaved by a level 2-to-3 multiplexer ( M23 ) a DS3 signal
Two-stage multiplexing : multiplexing from DS1 to DS3 DS2, although defined, are seldom used. Instead, an M13
multiplexer is used that multiplexes in one-stage 28 DS1 signals and all the F-bits, C-bits into a DS3 signal with bit rate of 44.736 Mbps.

Fig. 5.9 T-carrier hierarchy

Stuffing Bits
A DS2 signal is formed by bit interleaving 4 DS1 signals In a recurrent manner, a bit from each of the 4 DS1’s is
placed ina sequential order But the four DS1 signal sources may be a slightly different bit
rage then the expected 1.544 Mbps Stuffing additional bits in specfic time slots of slower DS1
signal so that the composite DS2 signal is exactly 6.183 Mbps Stuffing bits are also used when 7 DS2 signals are multiplexing
into a DS3 signals

Fig. 5.10 DS2 frame ( 6.312 Mbps ) with Bit Stuffing

Fig. 5.11 DS3 frame ( 44.736 Mbps ) with Bit Stuffing

T1c Rate
Another legacy system format. 2 DS1 signals and a control bit ( C-bit ) a M11c bit-
interleaved multiplexer a DS1c signal DS1c signal uses a duo-binary modulation and in effect doubles
the bandwidth capacity of a T1 line

Fig. 5.12 T-carrier hierarchy

Multiplexing in Europe
European systems time-division multiplex 30 user time slots and one ( framing and signaling ) time slot for every 15 user time slots to yield an E1 ( or E11 ) frame with 32 time slots.
The functions of the multiplexer are round-robin polling, byte interleaving, and time compression.
In the receiving end, an E1 signal is demultiplexed into 30 user channels and 2 added channels for framing and signaling and each channel is decompressed to 64 Kbps.
Each frame is transmitted within 125 s, so the total bit rate is 2.048 Mbps.
E1 is different from DS1 in bit rate and also the absence of the F-bit. E1 signal uses an alternate mark inversion ( AMI ) with a high-density
bipolar three-zero ( HDB3 ) techniques.

Fig. 5.13 E1 rate ( 2.048 Mbps )

Multiplexing in Europe
30 DS0 channels + 2 64-Kbps channels ( for framing and signaling ) time compressed and byte multiplexed by a level 1 multiplexer an E1 signal
4 E1 signals + 4 64-Kbps channels ( for signaling ) time compressed and bit interleaved by a level 1-to-2 multiplexer an E2 signal ( 8.448 Mbps ).
4 E2 signals + 9 64-Kbps channels ( for signaling ) time compressed and bit interleaved by a level 2-to-3 multiplexer an E3 signal ( 34.368 Mbps ).

Fig. 5.14 European hierarchy

Table 5.4 Legacy Rates
397.2 Mbps
274.176 MbpsDS4
139.264 MbpsE3
97.728 Mbps
91.053 MbpsDS3c
34.368 Mbps44.736 MbpsDS3
32.064 Mbps8.448 MbpsE2
6.312 Mbps6.312 MbpsDS2
3.152 Mbps3.152 MbpsDS1c
2.048 Mbps-E1
1.544 Mbps-1.544 MbpsDS1
64 Kbps64 Kbps64 KbpsDS0
JapanEuropeUnited StatesFacility

PROS and CONS of Legacy Networks
Legacy networks were initially designed to carry voice signal from many sources to many destinations.
Switching functions play very important role in the legacy networks.
Due to the circuit-switching nature, time slots are assigned to a particular user for as long as the connection is alive, therefore the system is deterministic and its design simpler.
Pre-assigned time slots uses bandwidth inefficiently So, legacy networks do not cost-effectively accommodate high-
bit-rate services

5.1 Legacy Communications Systems: Concepts
Legacy Data Networks

Legacy Data Networks
Legacy synchronous communications networks do not address the requirements for voice and data applications in an equitable manner.
For voice communications, short delays through the network were the primary concern.
For data applications, the major concerns are high bit rates and low cost per unit of time. For example, banks, stock-brokerage firms, publishing companies, image
transmission. Data will be transferred in chunks, up to about 9000 bytes, known as
packets. Such systems are local area network ( LAN ), metropolitan area network
( MAN ), wide area network ( WAN ), and the switched multimegabit data services ( SMDS ).

LAN
Networks for a limited area ( building, campus ). Many terminals were connected on a LAN backbone, and based
on a LAN communications protocol, terminals were able to communicate among them.
Two major types : Ethernet and ring. Ethernet LANs ( IEEE 802.1 ) : hierarchical and transmission
rates is at 10 or 100 Mbps.Ethernet 10BaseT : 10 Mbps over a twisted pair of wires
FDDI ( Fiber Distributed Data Interface ) ( IEEE 802.5 ) : a counter-rotating fiber ring LAN at 100 Mbps effective data rate.FDDI employs 4B/5B coding and thus the actual bit rate is
125 Mbps.

MAN
LANs were expanded to cover a city or a metropolis and the MAN is evolved
Traffic from one LAN was brought to another via a function known as bridge.
LAN/MAN traffic was routed on the communications networks so that connectivity between 2 or more remote LANs/MANs could be established.
Dedicated links can be deployed if high traffics between two LANs/MANs is sustained 24 hours a day.

SMDS
A public MAN service developed by Bellcore Primarily for LAN interconnections. Based on the distributed queue dual bus ( DQDB )transport and
multiplexing mechanism and is defined in IEEE 802.6. The use of the DQDB format is based on a 53-byte cell structure
that is similar to the ATM cell. SMDS is a connectionless technology specified over
synchronous carriers like DS1, DS3, E1 and E3 lines.

Frame Relay ( FR )
FR is a packet service. Design philosophy is similar to that of a highway with ramps on
and off.At the ramps, any car, small or large, may approach the
highway at a slower speed.Once on the highway, one can travel any length of the
highway and as fast as the limit.So highway is equally accessible and shareable by all.
In FR, the ramps are the access points and the number of lances determines the bandwidth of the FR system.FR is a shared-bandwidth solution that takes advantage of
traffic pattern variability and oversubscription to provide a cost-effective data service.

Frame Relay ( FR )
At the access points, or the user-to-network interface, circuitry concentrates the packet traffic from a number of users, typically over leased lines ( T1 / E1 ).
The concentrated traffic is switched by means of a FR switch and it is put on a common backbone ( the highway ).
A number of FR switches are interconnected to form a FR network.

5.2 SONET and SDH
Introduction

Introduction
The evolution from copper wires to optical fibers led to Synchronous Optical Network ( SONET ) in USSynchronous Digital Hierarchy ( SDH ) in EuropeSince first deployment in the 1980s, SONET / SDH have
almost replaced all long-haul copper cables.The optical fiber has responded to an unexpected increase in
traffic demand and make “ information superhighway “ a reality

SONET / SDH
SONET is a set of standard interfaces in an optical synchronous network of elements ( NE ) that conform to these interfaces.
SONET interfaces define all layers, from the physical to the application layer.
SONET is a synchronous network SDH is also a synchronous network with optical interfaces. SDH is a set of standard interfaces in a network of elements that
conform to these interfaces. Like SONET, SDH interfaces define all layers, from the
physical to the application layer.

Fig. 5. 15 SONET / SDH services

SONET versus SDH
Technical similarities between SONET and SDH Bit rates and frame format organization Frame synchronization schemes Multiplexing and de-multiplexing rules Error control
Major differences : The variations about overhead bytes to accommodate differences
between US and European communications nodes and networks The SDH photonic interface specifies more parameters than SONET SONET and SDH have enough minor technical and linguistic differences
to add complexity ( and cost ) in their design

SONET versus SDH
Some nomenclature examplesSynchronous transport signal ( STS ) versus synchronous
transport module ( STM ), e.g., STS-1, STS-3, STS-12, STS-48 versus STM-1, STM-4, STM-16.
Synchronous payload envelope ( SPE ) versus virtual container ( VC )
Virtual tributary ( VT ) versus tributary unit ( TU )

SONET / SDH Benefits
Reduced cost: It lowers operations cost It has the same interface for all vendors
Integrated network elements It allows for multi-vendor internetworking It has enhanced network element management
Remote operations capabilities : provision, test, inventory, customize, and reconfigured
It offers network survivability features. It is compatible with legacy and future networks

SONET and SDH Rates
SONET and SDH rates are in the range of 51.85 – 9953.28 Mbps
SONET signal in electrical nature : synchronous transport signal level N ( STM-N )
SDH signal in electrical nature : synchronous transport module level N ( STM-N )
In optical signal nature : optical carrier level N ( OC-N )

Table 5.5 SONET / SDH Rates

Why Use SONET / SDH ?
Why is glass fiber better than copper wire ? Higher transmission reliability.
• Glass fiber is not as susceptible to radio frequency or electromagnetic interference ( RFI, EMI ) as copper wire unless it is shielded and well grounded
Lower bit error rate ( BER ) : lower inter-symbol interference among fibers than copper wires, so lower bit error rate.
Higher bandwidth per fiber Fiber can transmit without repeaters at longer distance compared to
copper wires. Fiber yields thinner cable than copper. SONET/SDH is based on standards, which enables multivendor
compatibility and interoperability.

5.2 SONET and SDH
SONET/SDH Networks

SONET / SDH Network
SONET / SDH network consists of nodes or network elements ( NEs ) Are interconnected with fiber cable User and network information is transmitted over the fiber
cable SONET NEs receive signals from DS1, DS3, ATM, Internet,
LAN/MAN/WAN, networks of different topologies such as rings, trees. For example, LAN at 10 Mbps, 100 Mbps or higher bit rates.
SDH signals may also be connected with a SONET and vice versa, to exchange information between two kinds of networks.

Fig. 5. 16 SONET network

Network Topologies
Three major network topologies : tree, ring, and mesh Tree
A hierarchical distribution of NEsMost used in LANs, such as EthernetA source is connected to a distribution function ( known as
hub ) that routes a source packet to its destination node.A connection between source and destination is established
for the duration of the packet through the hub.Very efficient for asynchronous data transmission but not for
real-time data and voice. If a hub fails, all connections through it die.

Network Topologies
Ring : consists of NEs interconnected with a dual fiber, the primary and secondary, to form a ring.Some of the NEs are also assigned to communication with
other rings or topologiesWhen one fiber fails, the other can still keep the integrity of
the ring If both fiber breaks, then the network is reconfigured,
forming a ring using both the primary and secondary and the packets will flow through all fibers but the broken ones.
Ring offers fast path protection and is widely used in LANs or within a relatively limited radius ( campus, town, high risers).

Network Topologies
Mesh : consists of NEs fully interconnectedWhen one link breaks, the adjacent NE detects the breakage
and reroutes the traffic to another NE.Mesh provides transmission protection and network
restoration capabilities.Mesh also provides disaster avoidance capabilities when a
cluster of NEs may fail.Better applicable in densely populated areas.
SONET / SDH networks are based on ring topologies Other topologies may be mixed into networks as well.

Fig. 5. 17 Ring, tree and mesh topologies

A Hierarchical Process
A hierarchical process can transformed any type of non-SONET signal into SONET networks.
1. Segmenting the signal and mapping the segments in small containers known as virtual tributaries ( VTs ).
2. Once the VTs have been filled with segmented payload, they are grouped in larger containers that are know as groups.
3. Groups are then mapped into a SONET frame.
4. Many contiguous frames entails the SONET signals to be transmitted over the OC-N fiber.
In SDH, VT are called tributary units ( TUs ) and the groups are called tributary unit groups ( TUGs ).

Fig. 5. 18 SONET hierarchy

Table 5.6 Broadband Services and Rates
9953.280STM-64STS-192
Uncompressed HDTV2488.320STM-16STS-48
Uncompressed Extended Quality TV622.080STM-4STS-12
SMDS, broadband-ATM, high-definition TV ( HDTV )
155.520STM-1STS-3
51.840STM-0STS-1
6.912VT6
3.456VT3
High-capacity digital services2.304VT2
Voice / high-speed digital services1.728VT1.5
Sample ServicesBit Rate ( Mbps )
SDHSONET

Path, Line and Section
A SONET / SDH frame is transmitted from an end user to another end user through nodes in the network.
To ensure the deliverability and the integrity of the signal, overheads are added to the sending signal to be used for network administration purposes.
This overhead information is transparent to end users. The overhead has been organized hierarchically in three types :
PathLineSection

Path, Line and Section
Path : overhead added at transmitting path-terminating equipment ( PTE ), and it is read by the receiving PTE. Path information is not checked or altered by intermediate equipment
Line : overhead added by the transmitting line-terminating equipment ( LTE ) to be used by the receiving LTE. At the edges of the networks, ( where there are no LTEs, ) PTEs play the
role of LTEs Section : overhead added by equipment terminating a physical segment of
the transmission facility. A segment between two repeaters A segment between an LTE and a repeater A segment between an PTE and a repeater A segment between two adjacent LTEs where no repeaters between
them. All these are sections.

Fig. 5.19 Path/Line/Section definitions

Fig. 5.20 Path/Line/Section definitions

5.2 SONET and SDH
SONET/SDH Frames

STS-1
The smallest SONET frame Can be visualized as a 2-dimensional matrix of 9 rows by 90
columns, each entry is a byte. The whole STS-1 has 9 x 90 = 810 bytes The first 3 columns : transport overhead for section and line. Synchronous Payload Envelope ( SPE ) : the byte capacity
contained from the 4th column to the last column, totally 87 columns or 783 bytes.
Path overhead : the 4th column. Fixed stuff : columns 30 and 59 of the STS-1. The actual payload capacity is 84 columns, i.e., 756 bytes or
48.384 Mbps effective bit rate.

Fig. 5.21 SONET STS-1 frame structure

SDH AU-3
SDH does not specify a frame similar to SONET STS-1. It has a payload container as small as the SONET SPE, know as
virtual container 3 ( VC-3 ). VC-3 has a column for path overhead, called the VC-3 path
overhead ( VC-3 POH ), and two fixed stuff columns ( columns 30, 59 of VC-3 ).
The actual payload capacity in a VC-3 is also 84 columns or 756 bytes, similar to the SONET case.
At the VC-3 and in the 4th row, three additional bytes are added for the VC-3 pointer ( H1, H2, and H3 ).
Administrative unit level 3 ( AU-3 ) : VC-3 + VC-3 pointer AUG ( administrative unit group ) : 3 AU-3s are byte-
multiplexed

Fig. 5.22 SDH AU-3 frame structure

Transmitting an STS-1
To transmit an STS-1 over optical fibers, one starts with the most significant bit ( MSB ) of the byte in column 1, row 1.
Then when the byte is serially transmitted, it continues with the byte in column 2, row 1; and so on.
After the first row is transmitted, the process will transmit the 2nd row, and so on.
In 125 s, all 6480 bits are transmitted, so the bit rate is 51.86 Mbps.

Fig. 5.23 SONET STS-1 frame: unfolded

Floating Frames
SPE = user data + path overhead STS-1 = SPE + line and section overhead When an STS-1 is received, the beginning of the frame is not
necessary synchronous with the beginning of the frame that the receiving node generates.
The receiving node may need additional time to process the overhead information.
If the SPE waits for receiving node to synchronized, will suffer added delays, which is bad for a high-speed transmission network.
So , the “floating” SPE technique is used to minimized delays.

Fig. 5.24 STS-1 frame – SPE unfolded

Floating Frames
The process of an SPE is separated from the process of the line and section overhead of an STS-1.
The received SPE may be out of phase ( in increments of bytes ) with the beginning of the STS-1 frame, which is in synchronization with the NE.
This “out of phase” can be viewed as an offset in the STS-1 frame, in terms of columns and rows.
Thus, the first byte of the receiving SPE ( this will be the first byte of the path overhead ) is mapped in the SPE of the current STS-1 frame on row N and column K, for example.
As more bytes are received, the received SPE is wrapped around the STS-1 SPE space.

Floating Frames
Resulting path overhead will be aligned in the Kth column. Due to the offset, not all bytes of the received SPE will be able
to fit in the SPE space of the current STS-1 frame. And the rest of the SPE will be mapped to the next STS-1 SPE
and each SPE are synchronous with the 125-s interval. The end result will be an SPE mapped over two consecutive
frames.

SONET STS-1 with floating S

Mapping a floating ( partial ) SPE in an STS-1 frame

Mapping a floating ( complete ) SPE in STS-1

Section Overhead : SONET
The first 3 rows of the overhead space in an STS-1 frame, totally 9 bytes, carry synchronization and section overhead information.
A1 and A2 are fixed patterns : 0xF628 or in binary 1111 0110 0010 1000. Receiver will use these to detect the beginning of the frame. A1, A2 are not scrambled.
C1 : STS-1 ID, defined for each STS-1. B1 : used for error monitoring. E1 : a 64-Kbps voice communication channel for craft personnel.
In an STS-N signal, E1 is defined for the 1st STS-1 only. The other N-1 E1’s are not used.
F1 : used by the section. D1 to D3 : a 192-Kbps communication channel between STEs.
Used for alarms, maintenance, control, monitoring, administration, and other communicaiton needs.
In an STS-N signal, this channel is defined for the 1st STS-1 only. The other N-1 E1’s are not used.

STS-1 section overhead

Line Overhead : SONET
Located in the row 4-9 of the overhead section, totally 45 bytes. H1, H2 :offset between the pointer and the first SPE byte. H3 : an action byte for frequency justification.
It carries valid payload if the justification is negative. BIP-8 : Used for locating errors.
It is calculated using even parity over the STS-1 for the previous frame after scrambling and placed in B2 before scrambling the current frame.
K1, K2 : for automatic protection switching. In STS-N, this is defined for #1 only.

STS-1 line overhead

Line Overhead : SONET
D4 to D12 : a 576-Kbps communication channel between LTE for Alarms Maintenance Control Monitoring Administration Other communication needs In STS-N, this is defined for #1 only
Z1, Z2 : not defined except in STS-N for #3, in which Z2 is only defined as line far-end block error ( FEBE ).
E2 : an express 64-Kbps communications channel between LTE In STS-N, this is defined for #1 only

Payload Pointers : H1, H2, H3
NDF ( New Data Found flag ) : first 4 MSB in the H1 byte “ normal = 0110 “ for the following 3 possible situations :
• No frequency justification
• Positive frequency justification has taken place
• Negative frequency justification has taken place
“ set = 1001 “: an arbitrary ( and significant ) change of the pointer vaule has occurred due to a change of data position in the SPE
S-bits : the size of the virtual tributary in the payload I-bit / D-bit word : for incrementing / decrementing the offset
Perform frequency justification in conjunction with the H3 byte H3 : a payload byte opportunity buffer when positive or negative
justifications are necessary

Payload pointers : H1 and H2

Pointer H3 – frequency justification

Functions of H1, H2 and H3
Identifies that a change has occurred in the pointer value ( NDF = 1001 ) due to an intermittent synchronization in the node where the new start is ( I + D bits ).
Identifies that a change may have occurred in the pointer value ( 0110 ) due to a frequency difference between node and incoming frequency. Received frequency may be slightly higher or lower than the node
frequency. Either more or fewer bits are received that what the SPE can fit. If the received frequency is higher ( lower ), then node will
perform a negative ( positive ) frequency justification. The I-bit / D-bit words value will indicate whether negative or
positive frequency justification is needed.

Frequency Justification : No Justification
The frame rate of the STS SPE = the frame rate of transport overhead ( OH; i.e., NE frame rate)
Then the alignment of the SPE is the same as the previous frame.
NDF = 0110; I-bit / D-bit words are not inverted. If pointer value = 0, the first byte of the data is located next to
the H3 byte; If pointer value = 10, the first byte starts on the 11th byte after
H3; Example
NDF = 0110 I, D value : 00 0010 1001 = 41H3 = 00000000

STS-1: no frequency justification

Frequency Justification : Positive Justification
Frame rate of the STS SPE < the transport OH ( i.e. NE frame rate )
The alignment of the SPE is slipped back by a byte. H1, H2 incremtns and I-bits are inverted. NDF = 0110 Example :
I, D : value 00 0010 1010 = 40 First byte in SPE next to the H3 is 0Positive justification is recognized quickly by examining the
bit next to the LSB of the H1 byte• 1 : positive• 0 : negative

STS-1 : positive-frequency justification

Frequency Justification : Negative Justification
The frame rate of the STS SPE > the transport OH (i.e., NE frame rate ).
The alignment of the SPE is slipped back by a byte H1, H2 decrements D-bit are inverted, NDF = 0110 Example :
The I, D value is 00 0010 1000 = 40H3 byte contains user payload in the current frame.

STS-1 : negative frequency justification

New Data Found ( example )
NDF = 1001 A resynchronization has taken place ( not due to a positive or
negative frequency justification but because of some system or payload-type change .
I-bit and D-bit are not inverted New pointer value in H1 and H2 For another case, known as concatenation indicaiton :
NDF=1001 I-bit and D-bit = 11 1111 1111

STS-1 : new data found

Path Overhead
The first column of the SPE ( 9 bytes ) Path bytes are directional. J1 : the trace byte , is user programmable
The receiving PTE collects 64 repeating J1 bytes to verify the connectivity with the transmitting PTE.
Default : 0x00 BIP-8 or B3 : error control. C2 : indicates the construction of SPE, the asynchronous mapping, ATM,
etc. G1 : path status to the originating PTE from the destination PTE. F2 : for end-user communication use. H4 : multiframe, is used as an end-to-end generalized multiframe indicator
for payloads. Z3, Z4, Z5 : user bytes, reserved for future use and undefined for now.

SONET STS-1 : path overhead

SDH VC-3/4 : path overhead

5.2 SONET and SDH
Virtual Tributaries

Virtual Tributaries
VT ( virtual tributary ) : small container that is used to transport user payloads.
In SDH, they are called VC ( virtual containers ). Each VT arrives within a 125 s interval. Several VTs with OH ( overhead ) will constitute an SPE.

Fig. 5.38 VTs : what are they ?

VT Capacities
VT 1.5 : a 3-column capacity ( 27 bytes ). VT2 : a 4-column capacity ( 36 bytes ). VT3 : a 6-column capacity ( 54 bytes ). VT6 : a 12-column capacity ( 108 bytes ). In SDH :
VT1.5 : TU-11.VT2 : TU-12.VT6 : TU-2.

Table 5.7 Virtual Tributaries and Payload Rates
6.9127110812VT6
3.456142546VT3
2.304213364VT2
1.728284273VT1.5
VT payload rates (Mbps)
VTs/SPEVTs/GroupBytes/VTColumns/VTVT Type

Fig. 5.39 Virtual tributaries

SPE Groups
An STS-1 SPE contains 87 columns, the real user payload is 84 columns.
The payload is partitioned in 7 groups, each group has 12 columns in capacity.
Each group can fit in 4 VT1.5 or 3 VT2 or 2 VT3 or 1 VT4. Different groups can have different types of VTs Each group can have only one type of VT. In SDH, groups are called TUG-2 ( tributary unit group ). 7 TUG-2 byte-multiplexed and add two fixed-stuff columns 1
TUG-3. 7 TUG-3 byte-multiplexed and add one path overhead column
1 VC-3 ( virtual container level 3 ).

SPE Groups
When VTs form one SPE group, they are byte-interleaved. Each SPE group can have only one kind of VT. The 7 SPE groups form SPE by byte ( or column ) interleaving The fixed stuffs columns and the path overhead column are also
byte interleaved to construct the SPE.

Fig. 5.40 SONET – VTs and group structures tributaries

Fig. 5.41 SONET – groups and SPE structures

SDH Groups
TU filled with user data are byte (or column ) interleaved to construct TUG-2.
Each TUG-2 can have only one type of TU. When all 7 TUGs are constructed, they are byte ( or column )
interleaved and add two columns of fixed stuff to construct TUG-3.

Fig. 5.42 SDH – TU and TUG structures

Fig. 5.43 SDH -- TUGs

Fig. 5.44 VT1.5 mapping in SPE

VT Superframe
VTs map data from different end users in the SPE payload.End user data may also be out of phase with each other and
to the STS-N frame.A pointer and a frequency justification scheme, similar to
the SPE level, applies on the VT level. Each VT is partitioned in a 1-byte VT overhead part and in a
VT envelope capacity ( depending on the type of VT ).VT1.5 : 26 bytes VT envelope capacityVT6 : 107 bytes VT envelope capacity
4 consecutive VTs from one user’s data form a VT superframe. H4 : indicates the beginning of the superframe ( byte overhead
V1 )

VT Superframe
Payloads below DS3 rates are mapped in and trasported by VT structures.
H4 in the SPE path overhead is used to indicate the phase of V1-V4 ( bits B7 and B8 ) as well as 6-, 16-, or 24-frame superframe indication ( bits B1 and B2 or B3 and B4 or B5 and B6 )To comply with Bellcore ( AR-254-CORE ), the following
rules apply to H4 bits :• X is set to “1” or• Bits B1 and B2 count from 00 through 11 over 24 frames or• Bits B3 and B4 count from 00 through 01 over 6 frames and then
repeat or• Bits B5 and B6 countr from 00 through 11 over 16 frames and then
repeat the counting process

Fig. 5.45 VT superframe

Fig. 5.46 VT superframe – H4 byte
V4XXXXXX 1 1
V3XXXXXX 1 0
V2XXXXXX 0 1
V1XXXXXX 0 0
V1 – V4H4 BYTE
1 2 3 4 5 6 7 8

VT Payload Pointer
VT payload pointer is analogous to the STS payload pointer.Provides a mechanism for flexible and dynamic alignment of
the VT envelope within the VT superframe VT payload pointer : V1 and V2
Viewed as one wordObtained in 250 s.First four bits of V1 are N-bits, indicating whether there are
new data occurred or not.Next two bits define the VT sizeRemaining 10 bits are I-bit and D-bit words
• Point out the beginning of the user frame in the VT superframe and whether a positive, negative, or no frequency justification should be made.

Fig. 5.47 VT payload pointer

Fig. 5.48 VT payload pointer -- NDF

Fig. 5.49 VT payload pointer -- value

VT Payload Pointer
Frequency adjustment is made by slipping by a byte forwand or back in time the VT envelope.Similar to the STS SPE frequency justifications.
The increment or decrement amount is indicated by inverting the I-bit or D-bit word, respectively.
When the frame rate of the VT envelope is greater than or less than that of the STS SPE, the alignment of the VT envelope is periodically slipped forward or backward in time by 1 byte shift ( negative or positive stuff bye ) and the pointer value is adjusted by 1.

VT Overhead
The first byte in the envelope. Over four frames, or 500 s, the four overhead bytes are V5, J2,
Z6 and Z7. The remaining bytes in a VT are user payload. For VT1.5, the user payload is 25 bytes. For VT6, the user payload is 106 bytes. Each VT envelope contains four bytes of VT POH ( V5, J2, Z6
and Z7 ), the remaining bytes are VT payload capacity.

Fig. 5.50 Virtual tributaries overhead

VT Overhead
V5 : the first POH byte in the VT superframe Error checking as a signal label Indicating the signal status
Bits in V5 are : BIP-2 (1) : set if parity of all odd-numbered bits of previous VT SPE is
even BIB-2 (2) : set if parity of all eveb-numbered bits of previous VT SPE is
even REI-V : VT remote error indication back to originating VT PTE. RFI-V : VT path remote failure indication in byte-synchronous DS1
mapping. Signal label : indicates content of the VT SPE. RDI-V : VT path remote defect indication.

Fig. 5.51 Virtual tributaries path overhead

Application : DS0 byte synchronous Mapping For DS1
In a DS1 frame, there are 24 time slots (bytes ). Mapping one DS1 in a VT1.5. User payload in a VT1.5 has 25 bytes, the first byte has
The phase of the signaling and the frame bits (bits P0 and P1)
Signaling for the 24 DS0 channels ( bits S1-S4 )The framing bit ( bit F )A bit not used ( or fixed stuff )
The remaining 24 bytes map the 24 bytes of the DS1 frame.

Fig. 5.52 VT1.5 DS0 byte –synchronous mapping in Ds1

Application : DS0 Byte-Asynchronous Mapping for DS1
A DS1 frame consists of 24 time slots User payload in a VT1.5 has 25 bytes, the first byte has
Fixed stuff ( bits R ) Information bits ( bit 1 )Stuff control bits ( bits C1 and C2 )Overhead bits ( bit O )Stuff opportunity ( bits S )
The remaining 24 bytes map the 24 bytes of the DS1 frame.

Fig. 5.53 VT1.5 DS0 byte –synchronous mapping in Ds1

5.2 SONET and SDH
STS-N/STM-N Frames

Single-Step Multiplexer
A multiplexer that receives N STS-1 SPEs within a time window and then in one single stage to multiplex them to produce an STS-N.
The basic building block ( signal ) for STS-N frames are STS-1 SPE when N > 1.
Multiplexing is on the byte level.

Fig. 5.54 STS-N single-stage interleaving.

Two-Step Multiplexer
Two-step multiplexing : K STS-1 SPEs may be received and multiplexed in an STS-K and then N/K STS-Ks multiplexed to produce an STS-N.
Multiplexing is on the byte level. Two-step multiplexing is more complicated than one-step
multiplexing. Two-step multiplexing also creates more delay ( because there
are more steps in multiplexing ) than one-step multiplexing.

Fig. 5.55 STS-N two-stage interleaving.

STS-N Frame Structure
Each STS-N frame has Nx90 columns and 9 rows. Overhead ( line, section ) : the first Nx3 columns Each STS-N SPE has Nx783 bytes The first N columns of an STS-N SPE are the path overhead For example
For an STS-3 frame, has a total of 3x90 = 270 columns by 9 rows.
Line & section overhead are the first 3x3 = 9 columnsEach STS-3 SPE has 3x783 = 2249 bytesThe first 3 columns of an STS-3 SPE are path overhead.

Fig. 5.56 STS-N frame structure.

STS-N Floating Frame
The component STS-1 SPE in an STS-N frame may be floating. Each component STS-1 SPE may start from a different location
in the STS-N SPE. The pointers H1, H2 and H3 for each component STS-1 SPE are
still in the STS-N section overhead and each identifies the starting location of its corresponding STS-1 SPE as well as makes frequency adjustments individually.

Fig. 5.57 STS-N example, N = 3.

Concatenation or Super-Rate
For example of STS-3 If 3 STS-1 SPEs are from different sources and each one may be
in different phases with each other and with the node, each will keep its own ponter H1-H3 and frequency justification.
If 3 SPS-1 SPEs are belong to the SAME signal source, and they arrive in a specific order and in synchronism ( which must be maintained throughout the end-to-end path .), these will be processed into concatenated SPEs.
The 3 SPEs are mapped in a known sequence and thus only one overhead pointer is required to point to the first SPE.
The remaining pointers contain a fixed code set to a value that means concatenation indication ( CI ).

Concatenation or Super-Rate
Also, only one path overhead is needed. At the receiving end, all 3 SPEs are received in the same order
they were transmitted. The STS that transports concatenated SPEs is called
concatenated STS, denoted by STS-Nc ( in this case, STS-3c ). Similar case for N > 3.

Fig. 5.58 STS-Nc example, N = 3.

Contiguous Concatenation in SDH
Allows bit rates in excess of the capacity of the C-4 container. Concatenation implies that payload should not be split up A virtually contiguous container within an STM-4 ( for example
). Then the payload of several consecutive AU-4’s are mapped in
a fixed order. The first pointer is set to its value and the rest pointers are set to
a fixed CI value. This VC-4 is identified as a VC-4-4c.

Virtual Concatenation
Some network (switching) nodes are not capable of switching complete STS-3c or VC-4-4c with contiguously concatenated payload in them.
Then these payload will be split into payloads of lower rate, like STS-1 and each STS-1 will be switched independently.
The responsibility of reconstruct the STS-1’s back to the original STS-3c is on the network elements.

STM-N Frame Structure
Section overhead : N x 9 columns Payload : N x 261 columns. The smallest STM ( STM-1 ) has 270 columns ( 9 overhead + 261 payload ). The first three rows of the first three columns of the SOH are the regenerator
section overhead ( RSOH ). The 4th row of SOH is the administrative unit pointer ( SUP ). The remaining 5 rows are the multiplex section overhead ( MSOH ). Comparison between SDH and SONET :
SOH vs. section overhead. AU pointer vs. SPE pointers. MSHO vs. line overhead
Constructing an STM-N : 3 VC-12 1 VC-2; 7 VC-2’s 1 VC-3; 3 VC-3’s 1 VC-4; N VC-4’s 1 STM-N

Fig. 5.59 STM-N frame structure.

STS-Nc Frame Structure
The major difference between STS-N and STS-Nc payload : then number of path overhead column in the SPE.For STS-N : N columnsFor STS-Nc : 1 column
The difference in the fixed-stuff columnsFor STS-N : 2N columnsFor STS-Nc : N/3 -1 columns
STS-Nc has more bandwidth for dedicated user payload and more efficient.

Fig. 5.60 STS-Nc frame structure.

Pointer Processing for STS-Nc
The pointer H1-H3 of the first STS-1 in the STS-Nc will be the pointer for the whole SPE.Pointer processingNew data flagFrequency justifications Identify the starting location of the STS-Nc SPE
The rest of the pointer bytes will contain a concatenation indicator value to indicate that the payload is concatenated ( i.e., it is an STS-Nc case ).H1 : 1001XX11 ( X : undefined )H2 : 11111111

Fig. 5.61 STS-3c transport overhead.

Transport Overhead : SOH for SDH
A1, A2 : frame alignment; fixed framing pattern set at the hexadecimal value 0xF628 [ 1111 0110 0010 1000 ]. A1, A2 are NOT scrambled.
B1, B2 : parity bytes for quality monitoring ( or error monitoring in SONET ). The parity is calculated over ALL bytes of the previous frame before
scrambling and is placed in the current frame before scrambling. D1 – D3 : for network management for the regenerator section
An 192 Kbps communication channels for alarms, maintenance, control, monitoring, administration, and other needs.
D4 – D12 : for network management as the D1 – D3 but for the multiplex section.
E1, E2 : a 64 Kbps voice communication channel for craft personnel. F1 : a maintenance byte J0 ( C1 ) : trace identifier

Transport Overhead : SOH for SDH
K1, K2 : for automatic protection switching ( APS ) control S1 : clock quality indicator M1 : transmission error acknowledgement

Fig. 5.62 STM-1 section overhead.

Scrambling
When the complete frame has been assembled, the bytes in it are scrambled.
Purpose : to assure the receiver that a density of 1’s is maintained in the signal.
A1, A2, C1 bytes are not scrambledA1 and A2 are used to locate the beginning of the frame, so
no scrambling are applied

Fig. 5.63 Frame scrambled.

STS-N Scrambler
The scrambling code is generated by the polynomial 1 + x6 + x7 The scrambler is frame synchronous at the line rate ( STS-N ),
and it has a sequence length of 127 bits that repeats itself. The scrambler is set to 1111111 on the most significant bit
( MSB ) of the byte following the Nth STS-1 C1 byte ( of an STS-N )
The framing bytes A1, A2 and C1 from the first STS-1 through the Nth STS-1 are NOT scrambled.
The scrambler runs continuously throughout the complete STS-N frame.

Fig. 5.64 STS-N scrambler.

Layered Overhead and Transport Function
How to transport traditional signals, such as DS1, E1, etc. with a SONET signal ?
To transport a DS1 signal to a SONET signal : The incoming DS1 signal at the path layer is mapped onto a VT. The VT is mapped onto the SPE, and the SPE path overhead is also
constructed. The SPE is mapped onto the SONET signal, and the line overhead
information is added. The signal is mapped onto the STS-N signal, and the section overhead
information is added.• Now the complete STS SONET signal is formed, and the signal is
scrambled.
The signal passed through the electrical-to-optical transducer ( the transmitter ), and the optical signal ( with an NRZ optical coding ) is coupled into the optical fiber and transmitted at the speed of light.

Fig. 5.65 Conversion of a legacy signal to a SONET, layered overhead and transport functions.

Interaction Between Layers
SONET signal is transmitted between NEs Similar layers of the SONET signal, as viewed between the
transmitting and receiving NEs, interact at the corresponding layers.

Fig. 5.66 Example—from DS3 on OC-N, layered overhead and transport functions.

Fig. 5.67 Interaction between layers, layered overhead and transport functions.

SDH Multiplexing
SDH follows a very similar hierarchical multiplexing scheme to SONET
Traditional signals are mapped onto containers, the containers are multiplexed into groups, and overhead is added to construct an STM-N signal. ( CCITT Recommendation G.907 )

Fig. 5.68 SONET multiplexing scheme.

Fig. 5.69 SDH multiplexing scheme.

5.2 SONET and SDH
Synchronization and Timing

Network Synchronization
On a network, from a receiving node point of reference, all signals are received at different phases with its clock and frame synchronization.
The phase difference could be easily engineered if it would remian fixed or bounded;Received signals can be aligned if the phase difference is
fixed.A fixed phase also implies all nodes are exactly operate at
the same frequency. But NEs are not exactly using the SAME frequency due to NEs
have different built-in clocks.

Network Synchronization
In practical, a small difference between the clocks from node to node may result in a substantial frequency variation as the signal passed through many nodes.
The problem can be solved if a common timing source can be established
The network uses a frequency of extremely high accuracy from a timing service known as Building Information Timing Supply ( BITS ) in North America
In Europe, the similar standard to BITS is the primary reference Source ( PRS).

Fig. 5.70 Network synchronization—a model.

Timing Accuracy : Strata
The timing architecture in the communications network is hierarchical.
Each node in the network is required to main a frequency accuracy and depends on its major function in the network for timing accuracy ( if other nodes in the network depend on it for timing accuracy).
The highest possible frequency accuracy is 10 x 10-11
Highly accurate atomic clocksThe clock will be the PRS and the accuracy is referred as
stratum 1.Stratum 1 accuracy allows a slip up to 2.523 periods per year

Timing Accuracy : Strata
Stratum 2 : 1.6 x 10-8 Stratum 3 : 4.6 x 10-6
Stratum 4 : 3.2 x 10-5
For example, the digital PRXs, central office terminals, and digital channel banks.
In SDH, PRS is called primary reference clock ( PRC )Accuracy 1.0 x 10-11 The clock is distributed throughout the entire networkRegenerated at the NEs by a synchronization supply unit
( SSU ) and also by a synchronous equipment clock ( SEC ).

Table 5.8 Timing Accuracy
DCB/COT/DPBX15.36 / minute3.2×10-54
e.g. 5ESS/DCS132.48 / hour4.6×10-63
e.g., 4ESS/5ESS11.06 / day1.6×10-82
PRS2.523 / year10×10-111
NotesSkip RateMinimum Accuracy
Stratum

Timing Stability
Since signal may pass through parts of network owned by more than one provider
SONET NEs must be synchronized with a stratum 3 or better quality clock.
Or, SONET NEs can equipped with an internal clock ( oscillator ) that has a minimum accuracy of ±20 parts per million ( ppm ).This is required to support operation, administration,
maintenance, and provisioning ( OAM&P ) functionality of all nodes in the network.
Network providers must also supply a timing reference signal that meets the recommended stability requirements.

NE Synchronization
An NE should be synchronized with the network. The strategy of synchronization has several models.
When model BITS or SASE is available, NEs are externally timed from the reference clock.
When BITS is not available, NEs are timed from a received OC-N signal.

BITS Timing Model
Where BITS ( or SASE ) is available, the NEs are externally timed from it.The same quality reference clock over two paths, the active
and the alternate, are supplied by BITS.The NE receives both signals, but it operates from the active
path. If the active path goes down, the NE selects the alternate
clock.NE’s time unit ( TU )
• Receiving the two clocks from BITS• Monitoring the incoming clocks for faults• Selecting the correct ones• Distributes the clock to all functional units in the NE

Fig. 5.71 BITS network synchronization.

OC-N Single DS1 Line Timing Model
The NE extracts the clock from an incoming signal, typically a DS1.
The incoming OC-N is used to extract an 8-KHz reference clock.A DS1 frame occurs 8000 times per second and that DS1
frames are mapped in VT1.5’s. The extracted 8 KHz is sent to the TU, which sends it over two
separate paths to the BITS BITS retimed and then sent it back to NE over the active and
alternate paths The TU distributes the retimed reference clock to all functional
units in the NE

Fig. 5.72 OC-N Line (DS1) timing model.

OC-M Single DS1 Line Timing Model
The NE extracts an 8-KHz clock from an incoming signal, typically a DS1 that is embedded in an incoming OC-M ( N > M) signal.
The extracted 8 KHz is sent to TU, then sent to BITS over two separate paths.
The BITS retimed and sent it back to the NE over the active and alternate paths.
The TU distributes the retimed reference clock to all functional units in the NE.

Fig. 5.73 OC-M Line (DS1) timing model.

OC-N Dual-DS1 Line Timing Model
The NE extracts two independent clocks from two OC-N incoming signals.
The two incoming OC-Ns are used to extract from DS1’s two 8-KHz synchronization signals.
The extracted 8 KHz is sent to TU, then sent to BITS over two separate paths.
The BITS retimed and sent it back to the NE over the active and alternate paths.
The TU distributes the retimed reference clock to all functional units in the NE.

Fig. 5.74 OC-N Line (two DS1) timing model.

Loop Timing Model
The NE is not connected to a BITS. The NE is connected to only one OC-N and to lower bit rate
OC-M ( N > M ) and DS-N. The NE extracts the clock from incoming signals of the loop,
typically a DS1. An incoming OC-N is used to extract an 8-KHz synchronization
signal. The extracted 8 KHz is sent to TU, . The TU retimed the clock based on an accurate phase-locked
loop oscillator, located on the TU and then distributes it to all functional units in the NE.

Fig. 5.75 Loop timing model.

Through-Timing Model
This model applies to regenerator elements. Each direction has its own TU and timing is extracted from each
direction. This model is not recommended for add-drop multiplexers.

Fig. 5.76 Through-timing model.

Clock Applications
The minimum free-running accuracy of a SONET minimum clock ( SMC ) shall be ±20 ppm.
An ADM could be timed from a clock extracted from a line or from an external clock sources, or though-timed. A holdover : when the reference clock fails, then for a specified limited
period of time, it enters a free-running state with a specified tolerance. A switched digital module in terminal mode ( TM ) configuration and loop-
timed may be required to provide holdover. A digital cross-connect system with external timing is required with a
minimum accuracy of ±4.6 ppm. Entry into holdover and restoration from holdover shall be error free.

5.2 SONET and SDH
Maintenance

Maintenance
Anomaly : a discrepancy between the actual and desired characteristics of an item.
Defect : a limited interruption in the ability of an item to perform a required function.
Failure : a persistent defect. An NE enters a failure state when a failure condition has been detected, and it exits a failure state when the condition has been corrected.
Maintenance of a system defines The functions to be monitoredThe requirementsThe criteriaTheir parameters

Maintenance
Performance of a function :AcceptableUnacceptable ( failed )Degraded
Main objectives of maintenance :Trouble detectionTrouble sectionalizationTrouble or repair verificationTrouble isolationRestoration

Maintenance
Maintenance requirementsAlarm surveillancePerformance monitoring ( PM )Control

Alarm Surveillance
Alarm surveillance deals with the detection and reporting of certain failures and degraded conditions in the network.
NE alarm surveillance takes place on different levels, at :Section terminating equipment ( STE )Line terminating equipment ( LTE )STS path terminating equipment ( STS PTE )VT path terminating equipment ( VT PTE )
A VT PTE contains all functionality of an STE, LTE and STS PTE.
An STS PTE has all the functionality of an LTE and STE.

Fig. 5.77 Maintenance: layered alarm surveillance.

Alarm Indications
A change of state may cause an alarm indication immediately as it occurs or after some period of time.
When a failure state is detected, an alarm indication signal ( AIS ) is constructed and it is sent to the next NE on the downstream path.AIS is to alert downstream equipment of an upstream failure.The response to a received AIS is a remote defect indication
( RDI ) signal in the upstream directionAIS and RDI status signals are communicated to the far end
over overhead bytes in the SONET/SDH signal

Alarm States, Declarations, and Indications
Loss of signal ( LOS ) : no light pulses persist for 100 s. If light pulses are lost for less than 2.3 s, then no LOS is
declared. However, if they persist for a period longer than 2.5 sec, then
an alarm message is sent to the operating system ( OS ). Loss of frame ( LOF ) : a severely erroneous frame ( SEF )
persists for a period longer than 3 ms. If at least four consecutive frameshave incorrect framing
patterns, then an alarm message is sent to the OS. Loss of pointer ( LOP ) : pointer failures occur, such as out of
range, wrong NDF, or any other failures related to the pointer processing mechanism. An alarm is sent to OS.

Alarm States, Declarations, and Indications
Equipment failures :Service affecting ( SA )Non-service affecting ( NSA )Classified as critical, major, and minor.When equipment failure is detected, a message is sent to OS.
Loss of synchronization : loss of primary or secondary timing reference. A message is sent to the OS stating the reason ( LOS, LOF, etc )
Automatic protection switching ( APS ) troubles : related to channel mismatch, K1 with unused code, K2 with APS mode mismatch, etc.

Alarm States, Declarations, and Indications
DCC failure : any failed hardware or failure to carry a data communications channel ( DCC ).When this occurs, then the switch moves to standby DCC
and a report is sent to the OS. Signal label mismatch : related to signal labels.
Payload label mismatch ( PLM )Unequipped ( ENEQ )Signal label mismatch is performed by monitoring the C2
byte for STS signal labels and for STS payload label mismatch ( PLM-P).
Also performed by monitoring the V5 byte for VT PLM and VT path unequipped.

Alarm States, Declarations, and Indications
AIS alerts the downstream equipment that a defect or a failure has been detected.Can be generated for
• Line ( AIS-L )• Path ( AIS-P)• VT path ( AIS-V)
Remote alarm indication ( RAI ) : alerts the upstream equipment ofa downstream failureRDIRFI : remote failure indication
Payload defect indication ( PDI ) : alerts the downstream equipment that there is a defect in one or more of its embedded payloads.

Table 5.9 SONET Alarms

AIS and RDI
AIS – L Generated when a line LOS / LOF is detected An STE forms an OC-N signal with a valid section overhead and
generates a line AIS by sending an all – 1’s pattern ( after scrambling ) for the remainder of the OC-N signal.
The signal is sent downstream. When the LTE detects AIS-L, an RDI signal is sent upstream.
AIS – P Generated when a path LOS / LOF / LOP is detected An LTE forms a STS path AIS by filling the entire STS SPE with all 1’s
including H1 – H3 bytes ( after scrambling). The signal is sent downstream to the STS-LTE. An RDI signal is sent upstream if the AIS is for LOS / LOF only.

AIS and RDI
AIS – V Generated when a VT LOS / LOF / LOP is detected.An STS PTE generates a VT path AIS by filling the entire
VT with all 1’s ( after scrambling ).The signal is sent downstream to the VT PTE.An RDI signal is sent upstream if the AIS is for LOS or
LOF. Embedded DS-N with failures ( LOS, LOF, or LOP ) will cause
an AIS depending on the composition. RDI alarm signals are sent upstream to
Alert the network Initiate trunk conditioning.

Types of RDI
STS path RDI : alerts the upstream STS PTE that an AIS has been received in the downstream STS path.
VT path RDI : alerts the upstream VT PTE that an AIS has been received in the downstream VT path.
DS-N RDI : when this signal is detected, it is converted to a VT path RDI signal if a DS-N is mapped into its associated VT.

AIS – RDI Summary
When an STE receives an invalid signal, it sends an AIS-L alarm downstream.
When an LTE receives an invalid signal or an AIS-L and it is unable to protect the line, it sends an STS path AIS downstream.
When an STS PTE receives either an invalid signal or an STS path AIS, it propagates the appropriate AIS downstream.
When a VT PTE receives either a VT path AIS or an invalid signal, it generates the appropriate AIS downstream.
Upon detection at a terminal of a service affecting failure, a local RED alarm is declared and an RDI signal is returned upstream to the far-end NE that terminates the service.
Automatic service management processes are initiated at each NE and they are maintained for the duration of th failure.
Alarm states and RDI are coordinated between source and sink to restore service.

Performance Monitoring
Performance monitoring ( PM ) : a set of rules for the in-service monitoring of the transmission quality.
Difference between SONET and SDH PM philosophy :SDH : PM is based on counting erroneous blocks within a
period of a second.SONET : based on counting code violations within a period
of a second. SONET PM functions :
Detection of transmission degradationDetection of performance parameter deviationCommunication of OSs

Performance Monitoring
NE gathers PM from the values of : Section BIP ( B1 ) Line BIP ( B2 ) STS path BIP ( B3 ) VT path BIP ( bits 1 and 2 of V5 : BIP – 2 )
PM stores information collected over a period of time in some registers. Information related to The current period The previous period The recent period Threshold value
Two types of registers Current-second register ( CSR ) : contains defects or anomalies that have
occurred within a second. Current-period register ( CPR ) : contains cumulative defects or
anomalies detected and stored in the CSR.

PM Requirements
A SONET NE shall provide the following accumulation and storage registers :One current 15 minOne current dayOne previous 15 minOne previous day31 recent 15 min

PM Inhibition Registers
Inhibition registers are positive and negative adjustment registers that are used to add or subtract one of the following to a current period registerCoding violation ( CV )Erroneous second ( ES )Severely erroneous second ( SES )Unavailable second ( UAS )Line pointer justification ( PJ ), STS path PJ, and VT path PJ
All of the above have a negative adjustment register, a positive adjustment register, or both

PM at the Physical Layer
At the (photonic) physical layer, only the current value ( event ) is requiredLaser bias current ( LBC ) ≡ LBCnormal = LBC/LBCo, where
LBCo is the initial/nominal value provided by the NE supplier
Optical power transmitted ( OPT ) ≡ OPTnormal = OPT/OPTo, where OPTo is the initial/nominal value provided by the NE supplier.
Optical power received ( OPR ) ≡ OPRnormal = OPR/OPRo, where OPRo is the initial/nominal value provided by the NE supplier.

PM at the Section Layer
Severely erroneous framing seconds ( SEFS-Ss ) : a count of seconds during which an SEF defect was present
Coding violations ( CV-Ss ) : a count of BIP errors detected at the section layer ( using the B1 byte ).
Erroneous seconds ( ES-Ss ) : a count of the number of seconds during which at least one section layer BIP error was detected or an SEF or LOS defect was present
Severely erroneous seconds ( SES-Ss ) : a count of the seconds during which K or more section layer BIP errors was detected or an SEF or LOS defect was present.

PM at the Line Layer
The line layer performance parameters are divided into near end ( NE ) and the far end ( FE )
For the near-end line layer, performance parameters are :NE line coding violations ( CV-Ls ) : a count of BIP errors
detected at the line layer.NE line erroneous seconds ( ES-Ls ) : a counter in seconds
during which at least one line layer BIP error was detected or an AIS-L defect was present
NE line severely erroneous seconds ( SES-Ls ) : a counter in seconds during whichk K or more line layer BIP error ware detected or an AIS-L defect was present

PM at the Line Layer
NE line unavailable seconds ( UAS-Ls ) : a count in seconds during which the line was considered unavailable.
NE line failure counts ( FC-L ) : a count of the number of near-end line failure events.
• A failure event begins when an AIS-L is declared and ends when an AIS-L is cleared.
Protection switching count ( PSC ) : relates to systems that are equipped with two switching fabrics, the working and the protection
• For working line : a count of the times that service switched from the monitored line to the protection line + the times it switched back to the working line.
• For protection line : a count of the times that service switched from any working line to the protection line + the times it switched back to the working line.

PM at the Line Layer
Protection switching duration ( PSD ) : a count in seconds• For working line : a count in seconds that indicates the duration of
time service was carried on the protection line.• For protection line : a count in seconds that indicates the duration of
time the protection line was used to carry service.STS pointer justification ( STS-PJ ) : a count of the STS
pointer adjustments created or absorbed by an NE due to differences in the frame rates of incoming and outgoing SONET signals.
• The STS-PJ parameter is accumulated for a non-terminated STS path.
For the far-end line layer performance parameters are :FE line coding violations ( CV-LFEs ) : a count of BIP errors
detected by the FE LTE and reported back to the NE LTE using the REI-L in the line OH.

PM at the Line Layer
FE line erroneous seconds ( ES-LFEs ) : a count in seconds during which at least one line BIP error was reported by the FE LTE using the REI-L or an RDI-L defect was present.
FE line severely erroneous seconds ( SES-LFEs ) : a count of the seconds during which K or more line BIP errors were reported by the FE LTE or an RDI-L defect was present.
FE line unavailable seconds ( UAS-LFE ) : a count in seconds during which the line was considered unavailable at the FE.
FE line failure counts ( FC-LFEs ) : a count of the number of FE line failure events.
• A failure event begins when an RFI-L failure is declared and it ends when an RFI-L is cleared.

PM STS Path Layer
STS path layer performance parameters are divided into STS and VT. Each failure divided into near end and far end The near end STS path layer performance parameters are :
NE STS path coding violations ( CV-Ps ) : a count of BIP errors detected at the STS path layer.
NE STS path erroneous seconds ( ES-Ps ) : a count in seconds during which at least one STS path BIP error was detected or an AIS-P defect was present.
NE STS path severely erroneous seconds ( SES-Ps ) : a count of the seconds during K or more STS path BIP errors were detected or an AIS-P or LOP-P was present.
NE STS path unavailable seconds ( UAS-P ) : a count of the seconds during which the STS path was unavailable.
NE STS path failure counts ( FC-Ps ) : a count of the number of NE STS path failure events.
• A failure event begins when an AIS-P or LOP-P is declared and it ends when it is cleared.

Fig. 5.78 Performance monitoring: intermediate path.

Fig. 5.79 Maintenance: facility loopbacks.

Fig. 5.80 Maintenance: DS-N loopbacks.

5.2 SONET and SDH
IP over SONET

IP over SONET
Mapping IP over SONET takes 4 steps
1. The IP packet consists of a header and a variable-length data field, known as a datagram
2. There is a protocol known as point-to-point protocol ( PPP ). The IP datagram is encapsulated ina PPP packet; that is , a header is attached to it.
3. The PPP-encapsulated IP datagram is framed using high-level data link control ( HDLC ).
4. The end result is mapped row-wise and byte-wise in the SPE. That is, VTs and byte multiplexing is not applicable in this case.

IP over SONET
PPP provides multiprotocol encapsulation, error control, and link initialization control features.
HDLC is primarily used for frame delineation. That is, to identify the start and the end of the IP/PPP/HDLC frame.
Each HDLC frame stars and ends with the hexadecimal byte 7E or 0x7E.
Other 0x7E, if not in the start or the end position of the frame, it is replaced by the escape sequence 0x7D followed by 0x5E.
Similarly, the escape sequence 0x7D is replaced by 0x7D 0x5D.