Embed Size (px)
Citation preview




PREFAŢA
Organe de Maşini este prima disciplină de cultură tehnică generală cu caracteraplicativ în procesul de învăţământ al studenţilor de la specializările cu profil mecanic. Laaceastă disciplină studenţii realizează primele proiecte cu teme concrete.
În general tema primului proiect, la disciplina Organe de maşini, constă înproiectarea unei transmisii şurub-piuliţă folosite la diferite mecanisme de acţionare aledispozitivelor de ridicare, a preselor, a armăturilor industriale sau a maşinilor unelte.
Prezentul îndrumar este astfel structurat încât să înlesnească activitatea de proiectareatât la primul proiect pe care trebuie să-l realizeze studenţii, cât şi la proiectele ulterioare,care au o complexitate mult mai mare. În cadrul primului proiect studenţii trebuie să-şiînsuşească o metodologie de proiectare, un anumit mod de abordare a unei teme deproiectare, o logică a dezvoltării constructive a unui ansamblu; elemente care sunt de bazăşi în activitatea ulterioară. În acest scop autorii prezintă detaliat calculul şi proiectareadetaliată atât a mecanismului cu şurub cu frecare de alunecare dar şi cel cu frecare derostogolire, concomitent cu numeroase variante constructive.
În acest sens, în primul capitol sunt prezentate schemele structurale alemecanismelor cu şuruburi de forţă şi mişcare, cu încărcarea principalelor elementecomponente şi solocitările acestora.
În capitolul 2 sunt prezentate elementele de bază ale calculului şi proiectăriişuruburilor de forţă şi mişcare cu alunecare. Sunt prezentate tipurile de filete de mişcare,precizia de execuţie a acestora, materialele utilizate cât şi calculul şi proiectarea acestora.Sunt date precizări privind elementele specifice de calcul şi proiectare pentru cricul cupiuliţă rotitoare, pentru cricurile telescopice şi cu dublă acţiune, pentru cricurile cu pârghiicu o piuliţă şi cu două piuliţe, pentru presa cu şurub etc. De asemenea sunt prezentateelementele de calcul ale mecanismelor de acţionare manuală ale cricurilor cu clichetorizontal sau vertical.
Capitolul 3 abordează şuruburile de forţă şi mişcare cu rostogolire – şuruburile cubile. Sunt precizate materialele, parametrii constructivi şi elementele de calcul şi proiectare.Este dată şi o etapizare a calculului de proiectare cât şi unele detalii constructive.
Un capitol foarte bogat cuprinde soluţii constructive, sub formă de desene deansamblu, de mecanisme şurub-piuliţă cu alunecare şi respectiv cu rostogolire.
Pentru elementele standardizate sunt prezentate, sub formă de anexe, date concreteprivind forma şi dimensiunile acestora.
La elaborarea prezentului îndrumar s-a folosit experienţa colectivelor cadrelor deOrgane de maşini din Braşov, Cluj şi Galaţi, pentru care dorim să le mulţumim.
Autorii.

CUPRINS
PREFAŢA…………………………………………………………………………….……………3
CAPITOLUL 1. MECANISME CU ŞURUBURI DE FORŢĂ ……………………………..…71.1 CONSIDERAŢII GENERALE…….………………………………………...………..71.2. SCHEME STRUCTURALE ALE MECANISMELOR CU ŞURUBURI DE FORŢĂ.DIAGRAME DE FORŢE ŞI MOMENTE ……………………………………….………...9
1.2.1. Cricul simplu (şurub-piuliţă fixă)……………………………………………... 101.2.2. Cricul cu piuliţă rotitoare……………………………………………………….121.2.3. Cricurile telescopice şi cu dublă acţiune………………………………………. 131.2.4. Cricuri pe glisiere……………………………………………………………… 161.2.5. Cricuri cu pârghii…………………………………………………………….. 181.2.6. Cricuri cu pârghii pentru ridicarea sarcinii la distanţe mari faţă de sistemul deacţionare………………………………………………………………………………..221.2.7. Cric cu pârghii şi platformă……………………………………………………. 241.2.8. Cric şurub-piuliţă pentru ridicarea sarcinilor laterale………………………….. 251.2.9. Cric cu şurub şi pârghii pentru bărci de salvare………………………………...251.2.10. Presa cu şurub cu piuliţă fixă şi cu piuliţă rotitoare………………………… ..251.2.11. Prese cu şurub şi pârghii……………………………………………………….271.2.12. Prese cu şurub şi fălci mobile………………………………………………….281.2.13. Presă cu şurub cu pene……………………………………………………….. .281.2.14. Presă cu şurub pentru extragerea inelelor interioare ale rulmenţilor…………..291.2.15. Platformă de ridicat……………………………………………………………291.2.16. Menghine cu şurub…………………………………………………………… 301.2.17. Cheie de strângere cu şurub…………………………………………………....311.2.18. Ancoră reglabilă………………………………………………………….……311.2.19 Tije filetate pentru robinete………………………………………………….…311.2.20. Şuruburi conducătoare pentru strunguri………………………………….……35
CAPITOLUL 2. ŞURUBURI DE FORŢĂ CU ALUNECARE ……………………….. …….382.1. FILETE PENTRU ŞURUBURI DE FORŢĂ CU ALUNECARE ..………………….38
2.1.1. Consideraţii generale …………………………………………………………...382.1.2. Filetul pătrat……………………………………………………………………..402.1.3. Filetul trapezoidal……………………………………………………………….412.1.4. Filetul ferăstrău………………………………………………………………….442.1.5. Filetul rotund……………………………………………………………………46
2.2. ALEGEREA PROFILULUI FILETULUI…………………………………………….472.3. TOLERANŢE ŞI AJUSTAJE……………………………………………………….. .48
2.3.1. Sistemul de toleranţe şi ajustaje al filetului trapezoidal ISO……………………482.3.2. Sistemul de toleranţe al filetului ferăstrău……………………………………....55

Cuprins 5
2.3.3. Sistemul de toleranţe al filetului rotund……………………………………….. 592.4. MATERIALE UTILIZATE ÎN CONSTRUCŢIA MECANISMELOR CU ŞURUBŞI PIULIŢĂ CU ALUNECARE …………..……………………………………………...61
2.4.1. Materiale utilizate la execuţia şuruburilor de forţă şi a piuliţelor ……………....612.4.2. Materiale utilizate pentru alte elemente componente ale mecanismului şurub –piuliţă…………………………………………………………………………………...65
2.5. CALCULUL ŞI PROIECTAREA ŞURUBURILOR DE FORŢĂ CUALUNECARE……………………………………………………………………………...71
2.5.1. Calculul şi proiectarea şurubului principal……………………………………...712.5.2. Şurubul secundar………………………………………………………………...782.5.3. Verificarea şurubului…………………………………………………………….80
2.6. CALCULUL ŞI PROIECTAREA PIULIŢEI…………………………………………852.6.1. Dimensionarea piuliţelor fixe……………………………………………………852.6.2. Dimensionarea piuliţelor rotitoare……………………………………………....86
2.6.2.1. Cric cu piuliţă rotitoare………………………………………………….……..862.6.2.2. Presă cu piuliţă rotitoare………………………………………………………..87
2.6.3. Verificarea piuliţei………………………………………………………………892.7. CALCULUL ORGANELOR AUXILIARE ALE DISPOZITIVELOR CUŞURUBURI DE FORŢĂ CU ALUNECARE ……………………………………………89
2.7.1. Calculul cupei…………………………………………………………………...892.7.1.1. Cricul simplu şi cricul telescopic……………………………………………....922.7.1.2. Cricul cu piuliţă rotitoare şi cricul telescopic cu dublă acţiune…………..94
2.7.2. Calculul mecanismelor de acţionare……………..……………………………...962.7.2.1. Calculul manivelei………………………………………………………………..972.7.2.2. Calculul roţii de clichet………………………………………………………....992.7.2.3. Calculul clichetului……………………………………………………….…....1022.7.2.4. Calculul bolţului………………………………………………………………..1032.7.2.5. Calculul arcului cilindric elicoidal de compresiune……………………….104
2.7.3. Construcţia şi calculul corpului………………………………………………...1062.7.3.1. Corpul de cric……………………………………………………………...……1062.7.3.2. Corpul de presă…………………………………………………………………109
CAPITOLUL 3. ŞURUBURI DE FORŢĂ CU ROSTOGOLIRE …………………………..1143.1. CONSIDERAŢII GENERALE……………………………………………………....1143.2. MATERIALE UTILIZATE PENTRU EXECUŢIA ELEMENTELORCOMPONENTE ALE ŞURUBURILOR CU BILE……………………………………...1153.3. PARAMETRII CONSTRUCTIVI…………………………………………………..1153.4. CALCULUL TRANSMISIEI ŞURUB - PIULIŢĂ CU BILE………………………122
3.4.1. Dimensionarea şurubului……………………………………………………....1223.4.2. Sarcina (încărcarea) axială…………………………………………………….1233.4.3. Sarcina (încărcarea) radială……………………………………………………1273.4.4. Capacitatea de încărcare statică………………………………………………..1283.4.5. Sarcina dinamică de bază şi durabilitatea……………………………………...1293.4.6. Randamente……………………………………………………………………1313.4.7. Etapele calculului de proiectare a şuruburilor cu bile încărcate cu forţe axiale.132
3.5. ELEMENTE CONSTRUCTIVE…………………………………………………….1343.5.1. Şurubul…………………………………………………………………………1343.5.2. Piuliţa…………………………………………………………………………..1343.5.3. Organe de direcţie (deflectoare)………………………………………………..136
CAPITOLUL 4. SOLUŢII CONSTRUCTIVE………………………………………………..1394.1. SOLUŢII CONSTRUCTIVE DE MECANISME CU ŞURUBURI CU MIŞCAREDE ALUNECARE ………………………………………………………………………139

6 TRANSMISII CU ŞURUBURI DE FORŢĂ ŞI MIŞCARE
4.1.1. Cric cu piuliţă fixă……………………………………………………………..1394.1.2. Cric cu piuliţă rotitoare………………………………………………………...1434.1.3. Cricul telescopic şi cricul telescopic cu dublă acţiune…………………………1434.1.4. Cricuri cu pârghii………………………………………………………………1564.1.5. Presă cu piuliţă fixă…………………………………………………………...1594.1.6. Prese cu piuliţă rotitoare………………………………………………………1624.1.7. Dispozitive cu şurub pentru montarea şi demontarea rulmenţilor……………..1684.1.8. Transmisii cu şurub-piuliţă la maşinile de încercat la tracţiune-compresiune....1694.1.9. Transmisii cu şurub pentru elevatoare………………………………………....169
4.2. SOLUŢII CONSTRUCTIVE DE MECANISME CU ŞURUBURI CUMIŞCARE DE ROSTOGOLIRE (ŞURUBURI CU BILE)……………………………....174
CAPITOLUL 5. CALCULUL ASAMBLĂRILOR CU FLANŞE ………………………….1795.1. GENERALITĂŢI……………………………………………………………………1795.2. CALCULUL SIMPLIFICAT AL ASAMBLĂRILOR CU FLANŞE ……………....182
5.2.1. Calculul asamblării cu flanşe tip integral fără contact………………………...1835.2.2. Calculul asamblărilor cu flanşe libere fără contact……………………………1845.2.3. Calculul asamblării cu flanşe cu contact………………………………………185
5.3. CALCULUL PRECIS AL ASAMBLĂRILOR CU FLANŞE………………………1865.3.1. Calculul forţelor de strângere din asamblare………………………………….1865.3.2. Calculul asamblărilor cu flanşe fără contact…………………………………..194
5.3.2.1. Calculul de rezistenţă a şuruburilor…………………………………………1945.3.2.2. Calculul de rezistenţă a flanşelor…………………………………………….199
5.3.3. Calculul asamblărilor cu flanşe cu contact…………………………………….2085.3.3.1. Calculul de rezistenţă a şuruburilor…………………………………………2085.3.3.2. Calculul de rezistenţă a flanşelor…………………………………………….218
Anexa 1. Filete metrice ISO de uz general………………………………………………………242Anexa 2. Filetul patrat…………………………………………………………………………..246Anexa 3. Filete metrice trapezoidale……………………………………………………………..249Anexa 4. Filete ferastrau…………………………………………………………………………253Anexa 5. Filete rotunde…………………………………………………………………………..258Bibliografie………………………………………………………………………………………..259

CAPITOLUL 1
MECANISME CU ŞURUBURI DE FORŢĂ
1.1. CONSIDERAŢII GENERALE
Mecanismele şurub–piuliţă se utilizează pentru transformareamişcării de rotaţie în mişcare de translaţie, cu transmiterea unor sarcini mari(transmisii de forţă) sau având numai rol cinematic.
În concordanţă cu scopul urmărit şuruburile folosite se denumesc:- şuruburi de forţă utilizate pentru a dezvolta o forţă axială mare
(cricuri, prese cu şurub, dispozitive cu şurub, şuruburi de reglare etc.);- şuruburi de mişcare utilizate pentru transformarea mişcării de
rotaţie în mişcare de translaţie (şurub rotitor şi piuliţă în translaţie, şurubrotitor în translaţie cu piuliţă fixă, piuliţă rotitoare şi şurub în mişcare detranslaţie).
Mecanismele şurub–piuliţă au o largă utilizare în construcţia demaşini, datorită avantajelor pe care le prezintă:
- construcţie simplă, compactitate a construcţiei şi gabarit redus;- tehnologie de execuţie uşor realizabilă;- materiale ieftine;- posibilitatea transmiterii unor sarcini axiale mari, utilizând forţe de
acţionare mici;- asigurarea autofrânării;- funcţionare lină, fără zgomot.
Printre dezavantajele mecanismelor şurub – piuliţă se menţionează:- frecare mare între spirele filetului şurubului şi piuliţei, care
conduce la uzura pieselor în contact şi la un randament scăzut;- lipsa autocentrării;- prezenţa unor concentratori puternici de tensiune în zona filetată
care afectează rezistenţa la oboseală a şurubului.Sub aspect tribologic, mecanismele şurub-piuliţă pot fi cu frecare de
alunecare - şurub cu filet normal = 0,4…0,7 (tribosistem de alunecare),sau de rostogolire - şurub cu bile = 0,8…0,9 (tribosistem de rostogolire).
Performanţele variantei cu şurub cu frecare de rostogolire

8 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
sunt: precizia cinematică, durabilitate, rezistenţă la uzură şi randamentsuperior.
Randamentul mic la şuruburile cu frecare de alunecare impunefolosirea acestora cu precădere la mecanismele acţionate manual,întâlnindu-se însă şi în sistemele de acţionare ale maşinilor unelte, preselorcu şurub etc. Pentru mărirea randamentului, frecarea de alunecare a fostînlocuită cu frecarea de rostogolire, obţinându-se astfel mecanismele cuşuruburi cu bile, cu o tehnologie de execuţie mult mai pretenţioasă şi decimai scumpă. Acestea necesită şi un dispozitiv de frânare, deoarece condiţiade autofrânare nu mai este îndeplinită.
Cele mai importante domenii de utilizare a transmisiilor şurub–piuliţă sunt: ridicarea greutăţilor (cricuri); crearea încărcărilor la maşinile deîncercare; realizarea procesului de prelucrare mecanică (prese cu şurub,maşini unelte) etc.
Mecanismele de ridicat (cricurile) au în componenţa lor tribosistemede alunecare tip şurub–piuliţă. Formele constructive ale cricurilor, depindatât de modul de ridicare a sarcinii cât şi de modul de acţionare a acestora.
Posibilităţile cinematice sunt prezentate în fig. 1.1.
- Piuliţa (2) este fixă şi se roteşte şurubul (1) ( 01 , 01 v ), carerealizează şi mişcarea de translaţie (fig. 1.1 a). În această situaţie, pentruridicarea sarcinii Q este necesar să se prevadă posibilitatea pivotării capuluişurubului (1) în cupa (3), care nu se roteşte ci realizează doar mişcarea de
Fig. 1.1

Capitolul 1. Mecanisme cu şuruburi de forţă 9
translaţie, identică cu cea a şurubului. Pivotarea se poate realiza, utilizândun lagăr cu alunecare axial sau un lagăr cu rostogolire axial – rulment axial.Sub această formă, se întâlneşte la cricul simplu şi la presele cu şurub.
- Piuliţa (2) se roteşte ( 02 , 02 v ), şurubul (1) realizând doar
mişcarea de translaţie ( 01 , 01 v ), (fig. 1.1 b), fapt pentru care cupaeste solidar legată de capul şurubului. Sub această formă se întâlneşte lacricul cu piuliţă rotitoare.
- Şurubul (1) realizează mişcarea de rotaţie ( 01 , 01 v ), piuliţa(2) realizând mişcarea de translaţie ( 02 , 02 v ), (fig. 1.1 c). Subaceastă formă se întâlneşte la cricurile cu pârghii şi ca mecanism deacţionare a săniei port–cuţite la strunguri.
Din cele prezentate, rezultă că elementul motor, cel la care esteataşat mecanismul de acţionare, realizează o mişcare de rotaţie, iarelementul condus una de translaţie (fig. 1.1 b şi c). Când elementul motoreste şi element condus, acesta realizează atât o mişcare de rotaţie cât şi omişcare de translaţie (fig. 1.1 a).
Pe principiile de funcţionare prezentate sunt realizate diverse tipuriconstructive de cricuri, unele cu forme strict specializate pentru ridicareanumai anumitor sarcini şi în anumite condiţii – cricul cu pârghii cu o piuliţăde tip Dacia, cricuri pentru platforme etc., iar altele cu forme ce permitfolosirea în cele mai diverse situaţii.
1.2. SCHEME STRUCTURALE ALE MECANISMELORCU ŞURUBURI DE FORŢĂ. DIAGRAME DE FORŢE ŞIMOMENTE.
Analiza modului de funcţionare a transmisiei şurub-piuliţă şirealizarea corectă a schemei structurale sunt foarte importante în fazarealizării proiectului. De aceasta depinde, în mare măsură, proiectareacorectă şi realizarea parametrilor funcţionali, impuşi prin tema de proiectare.
Schemele structurale evidenţiază elementele componente aletransmisiei şurub-piuliţă, făcând posibilă determinarea încărcării fiecăruielement, în vederea efectuării calculului de rezistenţă, stabilirea formeiconstructive şi a transmisiei în ansamblul ei.
După natura mişcărilor relative ale elementelor mecanismului şurub-piuliţă se pot întâlni următoarele combinaţii de mişcări:
a) piuliţă fixă, şurubul executând o mişcare de rototranslaţie (criculsimplu – fig. 1.2, presa cu piuliţă fixă – fig. 1.16, robinetul cu ventil – fig.1.27);

10 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
b) şurub fix, piuliţa executând o mişcare de rototranslaţie (apare mairar);
c) şurubul execută o mişcare de rotaţie, iar piuliţa o mişcare detranslaţie (menghinele cu şurub - fig. 1.23, robinetul cu sertar cu tijăneascendentă - fig. 1.26);
d) piuliţa execută o mişcare de rotaţie, iar şurubul o mişcare detranslaţie (cricul cu piuliţă rotitoare - fig. 1.4, presa cu piuliţă rotitoare - fig.1.17 );
e) combinate: piuliţă fixă, şurubul secundar executând orototranslaţie, iar şurubul principal o mişcare de rotaţie (cricul telescopic cudublă acţiune - fig. 1.5);
f) piuliţa execută o mişcare de translaţie iar şurubul o mişcare derotaţie (mecanisme manuale de găurit).
Această clasificare nu este limitativă, putând să mai apară sau să fieconcepute şi alte combinaţii de mişcări.
Pe baza celor menţionate mai sus, se dau în continuare schemelefuncţionale ale principalelor mecanisme şurub-piuliţă cu acţionare manuală.
Pentru a uşura munca de proiectare, schemele funcţionale suntcompletate cu diagramele de forţe şi momente ce încarcă elementelemecanismului, diagrame ce servesc la calculul de rezistenţă al elementelorrespective.
1.2.1. Cricul simplu (şurub-piuliţă fixă).Principalele elemente ale unui cric simplu (fig. 1.2) sunt: cupa (1),
şurubul de mişcare (2), piuliţa fixă (3), corpul (4) şi mecanismul deacţionare (5), prin care se intervine asupra şurubului de mişcare (2).
Fig. 1.2

Capitolul 1. Mecanisme cu şuruburi de forţă 11
Prin intermediul mecanismului de acţionare (5), (fig. 1.2 a) seproduce rotirea şurubului (2) în piuliţa (3), acesta, executând şi mişcarea detranslaţie, în sensul ridicării (coborârii) sarcinii. Între cupa (1), care rămânefixă în procesul ridicării (coborârii) sarcinii şi şurubul de mişcare (2), carese roteşte faţă de aceasta, se formează un tribosistem de tip pivot.
Pe schema structurală se poate stabili şi încărcarea elementelorcomponente (fig. 1.2 b). Toate elementele cricului simplu sunt solicitate lacompresiune – de sarcina de ridicat F – şi la torsiune – de momente detorsiune ce se pot stabili, urmărind funcţionarea cricului. Pentru cupă şişurubul de mişcare – pe porţiunea dintre cupă şi mecanismul de acţionare –momentul de torsiune este momentul de frecare Mf care apare la frecareadintre aceste elemente. Celelalte elemente şi şurubul de mişcare – peporţiunea dintre mecanismul de acţionare şi piuliţa fixă – sunt solicitate demomentul de torsiune necesar pentru învingerea frecărilor Mt1 dintribosistemul şurub-piuliţă fixă. Momentul motor Mm , realizat demecanismul de acţionare, trebuie să echilibreze atât momentul Mt1 cât şi pecel de frecare Mf , deci ftm MMM 1 .
O variantă constructivă este prezentată în fig. 1.3 a. Pentru ridicareasarcinii se folosesc două bolţuri solidar legate de corpul superior (3) alcricului, care realizează mişcarea de translaţie, corpul inferior (4) fiind legat
de suportul (5), printr-o dublă articulaţie. Piuliţa (2) este fixă în corpulinferior, şurubul (1) fiind cel care realizează atât mişcarea de rotaţie, prinmecanismul de acţionare, cât şi pe cea de translaţie. Încărcările principalelor
Fig. 1.3

12 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
elemente ale cricului – şurub, piuliţă fixă, corp superior, corp inferior – suntprezentate în fig. 1.3 b.
1.2.2. Cricul cu piuliţă rotitoare.Schema structurală şi sarcinile care încarcă elementele cricului cu
şurub şi piuliţă rotitoare sunt prezentate în fig. 1.4. Principalele elemente aleacestui cric sunt: cupa (1), şurubul de mişcare (2), piuliţa rotitoare (3),corpul (4) şi mecanismul de acţionare (5), prin care se intervine asuprapiuliţei rotitoare.
Modul de funcţionare al cricului cu piuliţă rotitoare se poate urmări peschema structurală (fig. 1.4 a). Prin rotirea piuliţei (3), prin intermediulmecanismului de acţionare (5), şurubul (2) va executa doar mişcarea detranslaţie, în sensul ridicării (coborârii) sarcinii, rotirea acestuia fiindîmpiedicată de cupla de translaţie realizată între şurub şi corpul (4).
Datorită imposibilităţii rotirii şurubului la cele două capete (în zonacupei şi cea a corpului), acesta poate fi considerat, în timpul funcţionării, cao bară încastrată la ambele capete, solicitată la torsiune. Dacă se cunoaştemomentul de înşurubare Mt1, dintre şurub-piuliţă, din echilibrul şurubului,rezultă încărcarea la torsiune în sens invers a porţiunilor de şurub dintrepiuliţă şi cupă, respectiv dintre piuliţă şi corp. Fiecare dintre aceste porţiunivor fi încărcate cu momente de torsiune egale cu 150 tM, , trecerea de la un
Fig. 1.4

Capitolul 1. Mecanisme cu şuruburi de forţă 13
sens la celălalt de încărcare a tijei şurubului, realizându-se în zona centrală apiuliţei (fig. 1.4 b).
Cealaltă solicitare a elementelor cricului este compresiunea, sarcinacare încarcă aceste elemente fiind sarcina de ridicat F.
Prin mecanismul de acţionare, montat pe piuliţă, trebuie să serealizeze un moment motor Mm care să echilibreze atât momentul deînşurubare Mt1, cât şi momentul de frecare Mf ce apare în cupla de frecare(de regulă un rulment axial) dintre piuliţă şi corp, deci ftm MMM 1 .
1.2.3. Cricurile telescopice şi cu dublă acţiune.Aceste cricuri, cu două şuruburi, sunt identice din punct de vedere
structural, fiind compuse din aceleaşi elemente, după cum rezultă dinschemele structurale prezentate în fig. 1.5 a – pentru cricul telescopic şi înfig. 1.6 a – pentru cricul cu dublă acţiune. Aceste elemente sunt: cupa (1),şurubul principal (2), şurubul secundar (3), piuliţa fixă (4), corpul (5) şimecanismul de acţionare (6), prin care se acţionează asupra şurubuluisecundar (3).
Diferenţa între cele două scheme este de ordin constructiv, în sensulcă la cricul telescopic (fig. 1.5 a) cupa (1) şi capul şurubului principal (2)formează o cuplă de frecare axială – cu frecare de alunecare sau cu frecare
Fig. 1.5

14 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
de rostogolire (rulment axial) – în timp ce la cricul cu dublă acţiune (fig. 1.6a) cupa (1) este solidarizată de capul şurubului principal (2), executândaceleaşi mişcări cu acesta.
Modul de funcţionare al celor două cricuri, datorită acestei diferenţeconstructive, este sensibil diferit.
Astfel, la cricul telescopic, din fig. 1.5 a, se observă că prinintervenţia asupra mecanismului de acţionare (6), ataşat şurubului secundar(3), acesta se va roti împreună cu şurubul principal (2), cele două şuruburifiind solidarizate în cupla elicoidală şurub principal – piuliţă din şurubulsecundar (dacă Mt1 I > Mf ). În acest fel, apar mişcări relative între capulşurubului principal (2) şi cupa (1), respectiv între şurubul secundar (3) şipiuliţa fixă (4).
Cunoscând modul de funcţionare, se pot stabili sarcinile care încarcăelementele componente (fig. 1.5 b). Astfel, cupa (1) şi şurubul principal (2)sunt solicitate la compresiune de către sarcina de ridicat F şi la torsiune demomentul de frecare Mf din cupla de frecare; şurubul secundar (3) şi corpul(5) sunt solicitate la compresiune de sarcina de ridicat F şi la torsiune demomentul de înşurubare Mt1 II din şurubul secundar – piuliţă fixă; piuliţafixă (4) este solicitată la tracţiune de sarcina de ridicat F şi la torsiune demomentul Mt1 II .
Fig. 1.6

Capitolul 1. Mecanisme cu şuruburi de forţă 15
La cricul cu dublă acţiune, din fig. 1.6 a, se observă că prinintervenţia asupra mecanismului de acţionare (6), ataşat şurubului secundar(3), acesta se va roti împreună cu piuliţa şurubului principal, cu care facecorp comun, astfel încât şurubul principal (2) va efectua doar o mişcare detranslaţie, împreună cu cupa (1), solidarizată cu acesta. În acest fel, aparmişcări relative şi momente de torsiune: Mt1 I – între şurubul principal –piuliţa din şurubul secundar şi Mt1 II – între şurubul secundar – piuliţă fixă.În această fază se pot stabili şi sarcinile care încarcă elementele componente(fig. 1.6 b). Astfel, cupa (1) şi şurubul principal (2) sunt solicitate lacompresiune de sarcina de ridicat F şi la torsiune de momentul deînşurubare Mt1 I ; şurubul secundar şi corpul sunt solicitate la compresiune,iar piuliţa fixă este solicitată la tracţiune de sarcina de ridicat F şi toateacestea la torsiune de momentul de înşurubare Mt1 II .
La ambele cricuri, în locul în care este plasat mecanismul deacţionare, acţionează întregul moment motor, determinat cu relaţia:
cmm LFM (1.1)
în care: 350150mF N reprezintă forţa cu care acţionează utilizatorul; Lc
– lungimea manivelei.La calculul momentului motor, trebuie să se ţină seama de
momentele rezistente: pentru cricul telescopic:
Mm = Mf + Mt1 II (1.2) pentru cricul cu dublă acţiune:
Mm = Mt1 I + Mt1 II (1.3)Pentru alegerea uneia din cele două variante de cricuri cu două
şuruburi, se poate apela şi la criteriul dimensional (înălţimea cricului înpoziţie strânsă), în condiţiile impunerii aceleiaşi înălţimi de ridicat H. Pentrua se putea compara aceste dimensiuni, se va stabili, pentru fiecare din celedouă soluţii constructive, modul de realizare a cursei de ridicare.
La cricul telescopic, cursa de ridicat este realizată în totalitate deşurubul secundar, lungimea filetată a acestuia fiind:
pIIsII HHl (1.4)
unde:H este înălţimea de ridicare ( IIHH );
pIIH – lungimea piuliţei fixe.Şurubul principal este utilizat numai pentru apropierea cupei de
sarcina de ridicat. În consecinţă, lungimea filetată a acestui şurub se alegeconstructiv, cât permite lungimea şurubului secundar.

16 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
La cricul cu dublă acţiune, cursa de ridicare este realizată prinparticiparea atât a şurubului principal cât şi a şurubului secundar.Constructiv, sunt posibile două soluţii privind sensurile de înclinare alespirelor filetelor celor două şuruburi şi anume: filetele au acelaşi sens deînclinare (dreapta sau stânga), respectiv cele două filete au sensuri deînclinare diferite. În situaţia acceptării soluţiei cu filete înclinate în acelaşisens, la rotirea şurubului secundar, pentru ridicarea sarcinii, şurubulprincipal va coborî. Se va realiza astfel, la o rotaţie completă, o cursă egalăcu diferenţa paşilor celor două filete ( IIp –şurub secundar şi pI–şurubprincipal). Realizarea înălţimii de ridicare impuse H necesită un numărfoarte mare de rotaţii ale şurubului secundar, deci o lungime foarte mare aacestuia. În cazul în care sensurile de înclinare ale celor două filete suntdiferite, la o rotaţie completă a şurubului secundar, în sensul ridicăriisarcinii, şurubul principal se va deplasa în acelaşi sens, în urma rotiriipiuliţei din şurubul secundar. La o rotaţie completă, se va realiza o cursăegală cu suma paşilor celor două şuruburi ( III pp ), înălţimea de ridicareimpusă H realizându-se printr-un număr mic de rotaţii ale şurubuluisecundar, iar lungimea acestuia fiind mică. Pentru această situaţieconstructivă, se pot stabili lungimile filetate ale şuruburilor, dacă se cunoscşi înălţimile celor două piuliţe HpI şi HpII – plecându-se de la faptul căporţiunile filetate ale celor două şuruburi, care participă la realizarea
înălţimii de ridicat, sunt proporţionale cu paşii acestora
II
I
II
I
l
l
p
p – cu
relaţiile:
pIIII
IpIIsI H
pp
pHHHl
(1.5)
pIIIII
IIpIIIIsII H
pp
pHHHl
(1.6)
De regulă, lungimea şurubului principal se alege mai mare decât cearezultată din calculul cu relaţia (1.5), diferenţa dintre aceste lungimi fiindutilizată pentru apropierea şurubului principal de sarcină.
1.2.4. Cricuri pe glisiere.În cazul în care după ridicarea sarcinii aceasta trebuie deplasată pe
orizontală, se folosesc cricurile pe glisiere. Acest lucru se realizeazăprintr-un mecanism şurub-piuliţă la care elementul conducător este şurubul(6), care efectuează mişcarea de rotaţie, iar elementul condus este piuliţa,care realizează mişcarea de translaţie, aceasta fiind solidarizată de corpul

Capitolul 1. Mecanisme cu şuruburi de forţă 17
cricului (4), care realizează ridicarea pe verticală a sarcinii. În fig. 1.7 a şi bsunt prezentate două variante de astfel de cricuri. Pentru ridicarea peverticală a sarcinii, este utilizat un cric simplu (fig. 1.7 a), respectiv un cric
cu piuliţă rotitoare (fig. 1.7 b), pentru deplasarea pe orizontală fiind utilizatacelaşi mecanism, pentru care este prezentată şi schema de încărcare aşurubului, cu forţă şi momente (fig. 1.7 c). În fig. 1.7 d sunt prezentatevariante de montare a şurubului pentru deplasarea pe orizontală a sarcinii, lacare însă se modifică schema de încărcare a şurubului.
Fig. 1.7

18 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
1.2.5. Cricuri cu pârghii.Schemele structurale şi implicit modul de funcţionare al cricului cu
pârghii sunt diferite de ale celorlalte cricuri, la ridicarea sarcinii participândşi noile elemente ale acestora – pârghiile.
Frecvent folosite sunt cricul cu pârghii cu o piuliţă (tip Dacia), a căruischemă structurală este prezentată în fig. 1.8 a, şi cricul cu pârghii cu douăpiuliţe, cu schema structurală prezentată în fig. 1.9 a.
Principalele părţi componente ale acestor cricuri sunt: cupa (1),suportul cupei (2), pârghiile (3) (în număr de opt), şurubul de mişcare (4),piuliţa (5) şi lagărul cilindric (6) – la cricul cu o piuliţă, respectiv piuliţele(5) şi (6) – la cricul cu două piuliţe, placa de bază (7) şi mecanismul deacţionare (8), ataşat şurubului de mişcare (4).
Modul de funcţionare al celor două cricuri se stabileşte, urmărindschemele structurale ale acestora.
Astfel, la cricul cu pârghii (fig. 1.8 a), la care patru pârghii suntarticulate la bolţurile piuliţei (5) şi celelalte patru la bolţurile lagăruluicilindric (6), la o rotaţie completă a şurubului, piuliţa (5) se apropie de
Fig. 1.8

Capitolul 1. Mecanisme cu şuruburi de forţă 19
lagărul (6) cu un pas al filetului, realizând o înălţime de ridicare ce depindeşi de lungimea pârghiilor. Realizarea înălţimii de ridicare se face cu distanţevariabile, mai mari în apropierea valorii minime a unghiului de poziţie alpârghiei şi mai mici la valori mai mari ale aceluiaşi unghi.
La cricul cu două piuliţe (fig. 1.9 a), la care patru pârghii suntarticulate cu piuliţa (5) şi celelalte patru cu piuliţa (6), la o rotaţie completăa şurubului, cele două piuliţe se apropie cu doi paşi ai filetului, înălţimea deridicare fiind funcţie şi de lungimea pârghiilor. Şi la aceste cricuri înălţimeade ridicare se realizează cu distanţe variabile, mai mari la unghiuri mici şimai mici la valori mari ale aceluiaşi unghi. Pentru realizarea acestui mod defuncţionare, cele două porţiuni ale filetului ce formează cuple elicoidale cupiuliţele (5) şi (6) vor avea acelaşi filet, dar cu sensuri diferite de înclinare aspirelor, una filetată dreapta şi cealaltă filetată stânga.
Determinarea sarcinilor (forţe şi momente) care încarcă elementelecomponente ale cricurilor cu pârghii se poate efectua urmărind schema deîncărcare cu forţe (fig. 1.10) şi schemele din fig. 1.8 b şi 1.9 b, în care esteprezentată şi încărcarea cu momente.
Fig. 1.9

20 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Dacă forţele care încarcă elementele cricurilor cu pârghii cu una şi cudouă piuliţe sunt identice, încărcarea cu momente este diferită (v. fig. 1.8 bşi 1.9 b).
Forţele care încarcă elementele cricurilor cu pârghii depind atât desarcina de ridicat F (constantă) cât şi de unghiul de poziţie al pârghiilor (variabil). Solicitările fiind statice, pentru calculul de rezistenţă trebuie
determinate sarcinile maxime, care corespund valorii minime ale unghiuluide poziţie al pârghiilor min. Din raţiuni constructiv–funcţionale şi a mărimiisarcinilor, se acceptă o valoare minimă min. Din fig. 1.10 rezultă forţa caresolicită pârghiile la compresiune:
minsin
FR
2 , (1.7)
respectiv forţa care solicită şurubul la tracţiune:minctgFF . (1.8)
Momentele de torsiune care apar în timpul funcţionării cricurilor cupârghii, în zonele în care există mişcare relativă între elementele cricurilor,sunt funcţie de tipul cricului – cu o piuliţă sau cu două piuliţe.
La cricul cu pârghii cu o piuliţă, momentul care încarcă şurubul demişcare este momentul de înşurubare Mt1 care apare între şurub-piuliţă.Momentul motor, realizat prin mecanismul de acţionare, trebuie să învingăsuma momentelor rezistente: momentul de înşurubare Mt1 şi momentul de
Fig. 1.10

Capitolul 1. Mecanisme cu şuruburi de forţă 21
frecare Mf, care apare în rulmentul axial cu bile, montat între şurubul (4) şisuportul lagărului (6), deci ftm MMM 1 (v. fig. 1.8).
La cricurile cu pârghii cu două piuliţe, şurubul de mişcare, peporţiunea dintre cele două piuliţe, este solicitat la torsiune de momentul deînşurubare Mt1, care apare în prima cuplă elicoidală şurub-piuliţă. După ceade a doua piuliţă, se adaugă şi momentul de înşurubare din această cuplăelicoidală, astfel că momentul motor, realizat prin mecanismul de acţionare,este 12 tm MM (v. fig. 1.9).
Înălţimea de ridicare H este realizată prin alegerea corespunzătoare alungimii pârghiei şi/sau a unghiului de poziţie maxim al acesteia. Deoareceîn faza de proiectare este dificil a estima o anumită lungime a pârghiei, esterecomandată alegerea unghiului de poziţie maxim max şi a celui minim min
(se recomandă: 0max 80 ; 0
min 30 ).
Lungimea pârghiei (fig. 1.11):
minmax sinsin
Hl
2, (1.9)
recomandându-se pentru l o valoare întreagă.
Fig. 1.11

22 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Lungimea filetată a şurubului se determină în funcţie de tipulcricului – cu una sau cu două piuliţe – şi este compusă din lungimea utilă lu,necesară pentru ridicarea sarcinii, căreia i se adaugă înălţimea piuliţei Hp şilungimea necesară strângerii complete a cricului lc, pentru depozitare.
Lungimea utilă se determină cu relaţiile (v. fig. 1.11): pentru cricul cu o piuliţă:
maxminu coscosll 2 , (1.10)
pentru cricul cu două piuliţe: maxminu coscosll . (1.11)
Lungimea necesară strângerii complete a cricului, în scopul ocupăriiunui gabarit minim la depozitare, se determină cu relaţia:
mincc coslhll 22 ,
(1.12)
d,,mmd
hh sc 251051532
,
unde:d - este diametrul nominal al şurubului, iar hs, reprezintă înălţimea
părţii inferioare a suportului cupei (v. fig. 1.8 şi 1.9).Lungimea totală a porţiunilor filetate ale şuruburilor de mişcare se
calculează cu relaţiile: pentru cricul cu o piuliţă:
222 cmaxminpcups hlcoscoslHllHl (1.13)
pentru cricul cu două piuliţe:22cmaxpcups hlcoslHllHl (1.14)
Pentru stabilitatea mecanismului şurub-piuliţă cu pârghii, pârghiilesunt prevăzute, la capetele din zona suportului cupei şi la capetele din zonaplăcii de bază, cu sectoare dinţate care, în ipoteza acţionării centrice asarcinii de ridicat F, nu sunt solicitate (v. fig. 1.10 b).
Observaţie:Deoarece proiectanţii tineri (studenţii) sunt tentaţi să accepte exact
lungimile rezultate în urma calculului se recomandă alegerea unor valoriîntregi pentru aceste lungimi şi efectuarea în final a unei verificări grafice.
1.2.6. Cricuri cu pârghii pentru ridicarea sarcinii la distanţemari faţă de sistemul de acţionare.
Cricurile prezentate în fig. 1.12 a şi b realizează ridicarea sarcinii ladistanţe relativ mari faţă de sistemul de acţionare. Această distanţă este

Capitolul 1. Mecanisme cu şuruburi de forţă 23
dependentă de lungimea pârghiei (4), de care este legată cupa (1), prinintermediul unei articulaţii. La schema din fig. 1.12 a, şurubul (2) este
element conducător, piuliţa (3) executând doar mişcarea de translaţie, prinintermediul unui ghidaj executat în elementul bază (7). La schema din fig.1.12 b, elementul conducător este piuliţa (3), şurubul (2), executând
Fig. 1.12

24 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
mişcarea de translaţie, tot prin intermediul unui ghidaj axial executat înelementul bază (7). Pârghia (5), alături de pârghia (4), participă la realizareaînălţimii de ridicare. Schemele de încărcare ale şurubului de mişcare suntprezentate pentru fiecare variantă în parte. Pentru stabilirea sarcinii F careîncarcă şurubul este necesar să se stabilească reacţiunile în cuple, în modasemănător ca la cricurile cu pârghii.
1.2.7. Cric cu pârghii şi platformă.Cricul prezentat în fig. 1.13 reprezintă o variantă a cricului cu
pârghii cu două piuliţe (v. fig. 1.9), la care s-a reţinut numai partea
superioară. Prin renunţarea la angrenajul dintre pârghiile (3), a fost nevoiesă se prevadă un lagăr (5), pentru ca platforma (4) să se deplaseze axial cuacesta. Mecanismul de acţionare are două porţiuni filetate – o porţiune cu
Fig. 1.13
Fig. 1.14 Fig. 1.15

Capitolul 1. Mecanisme cu şuruburi de forţă 25
filet pe dreapta, respectiv cu filet pe stânga. Prin deplasarea axială simultanăa celor două piuliţe (2), prin intermediul unor ghidaje executate în suportul(6), se realizează ridicarea sarcinii, prin intermediul pârghiilor.
1.2.8. Cric şurub-piuliţă pentru ridicarea sarcinilor laterale.La cricul prezentat în fig. 1.14, este prevăzută talpa laterală (1),
pentru ridicarea sarcinii F. Şurubul (2), pe care este montat mecanismul deacţionare, realizează mişcarea de rotaţie, iar piuliţa (3), solidar legată detalpa (1), realizează mişcarea de translaţie.
1.2.9. Cric cu şurub şi pârghii pentru bărci de salvare.Cricul prezentat în fig. 1.15 este prevăzut cu cârligul (1) pentru
ancorarea bărcilor. Mecanismul de acţionare este ataşat şurubului (2), careexecută mişcarea de rotaţie, piuliţa (3), realizând mişcarea de translaţie.Pârghiile (4) şi (5), prin lungimea lor, definesc zona de ridicare a bărcii.Încărcarea cu forţe şi momente a elementelor mecanismului se stabileşteprin analiza echilibrului static al mecanismului.
1.2.10. Presa cu şurub cu piuliţă fixă şi cu piuliţă rotitoare.Schema structurală şi sarcinile care încarcă elementele presei cu
şurub cu piuliţă fixă sunt prezentate în fig. 1.16. Principalele elemente alepresei sunt: şurubul de mişcare (1), piuliţa fixă (2), traversa mobilă (3),cadrul (4) şi mecanismul de acţionare (5), prin care se acţionează asupraşurubului de forţă. Cadrul (4) (fig. 1.16 c) este format din placa de bază (6),traversa fixă (7) şi coloanele (8).
Fig. 1.16

26 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Modul de funcţionare se poate urmări pe schema structurală (fig.1.16 a). Şurubul de mişcare (1) realizează atât mişcarea de rotaţie, în urmautilizării mecanismului de acţionare (5), cât şi mişcarea de translaţie, princare se deplasează traversa mobilă (3) şi se realizează forţa de presare F.Legătura dintre şurubul de mişcare şi traversa mobilă se realizează printr-ocuplă de frecare axială – cu frecare de alunecare (fig. 4.15) sau cu frecare derostogolire (rulment axial) (fig. 4.17).
Conform modului de funcţionare, se pot stabili principalele solicitări
Fig. 1.17

Capitolul 1. Mecanisme cu şuruburi de forţă 27
pentru elementele presei. Şurubul de mişcare (1) este solicitat lacompresiune de sarcina F şi la torsiune de momentul de frecare Mf dintreşurub şi traversa mobilă. Piuliţa fixă (2) este solicitată la tracţiune de sarcinaF şi la torsiune de momentul din cupla elicoidală Mt1. Principalele solicităriale celorlalte elemente sunt: tracţiune pentru coloane, încovoiere pentrutraverse – fixă şi mobilă. Diagramele de încărcare ale elementelor presei cuşurub cu piuliţă fixă sunt prezentate în fig. 1.16 b.
Momentul realizat prin mecanismul de acţionare trebuie să echilibrezeatât momentul de înşurubare Mt1 cât şi pe cel de frecare Mf , deciMm=Mt1+Mf .
Schemele structurale ale preselor cu piuliţă rotitoare în cele douăvariante sunt prezentate în fig. 1.17 a şi b.
1.2.11. Prese cu şurub şi pârghii.Presele cu şurub şi pârghii (fig. 1.18 a şi b) sunt asemănătoare
structural cu cricul cu pârghii cu două piuliţe (v. fig. 1.9).Prin intervenţia mecanismului de acţionare, solidar – în mişcarea de
rotaţie – cu şurubul (1), cele două piuliţe (2) se apropie sau se depărteazăsimultan, datorită sensului invers de înclinare al spirei filetului de la celedouă capete ale şurubului. Presarea se realizează între placa (3), ce gliseazăpe coloanele presei şi elementul bază.
Dacă la varianta din fig. 1.18 a, cursa de presare este realizată doar prinintermediul pârghiilor (4), varianta prezentată în fig. 1.18 b realizează cursade presare şi prin deplasarea, de-a lungul coloanelor (6), a şurubului (1),datorită pârghiilor (5). Schemele de încărcare ale principalelor elementecomponente se stabilesc asemănător cu cele prezentate la cricurile cu pârghii(v. fig. 1.9).
Fig. 1.18

28 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
1.2.12. Prese cu şurub şi fălci mobile.Sunt asemănătoare structural cu cele prezentate anterior (v. fig. 1.18)
şi se execută în varianta cu simplu efect (fig. 1.19 a) şi cu dublu efect (fig.1.19 b). Şurubul (1), căruia îi este ataşat mecanismul de acţionare,efectuează o mişcare de rotaţie.
Piuliţa (2) efectuează mişcarea de translaţie şi prin intermediulpârghiilor (3), articulate la piuliţă, se acţionează asupra fălcilor (4), prinintermediul pârghiilor (5) şi (6) (fig. 1.19 a) sau direct (fig. 1.19 b).
1.2.13. Presă cu şurub cu pene.La presa prezentată în fig. 1.20, şurubul (1), căruia i s-a ataşat
mecanismul de acţionare, execută mişcarea de rotaţie, iar piuliţele (2) pe ceade translaţie. Pentrurealizarea mişcării detranslaţie pe verticalăa plăcii de presare (3),între aceasta şipiuliţele (2) seinterpun penele (4).Schemele de încărcarecu forţe şi momente aşurubului este identicăcu cea a cricului cupârghii cu două piuliţe(v. fig. 1.9).
Fig. 1.19
Fig. 1.20

Capitolul 1. Mecanisme cu şuruburi de forţă 29
1.2.14. Presă cu şurub pentru extragerea inelelor interioare alerulmenţilor.
Pentru extragerea inelelor interioare ale rulmenţilor de pe capetele dearbori se folosesc prese speciale, de tipul celei prezentate în fig. 1.21.Mecanismul de acţionare este ataşat şurubului (1), care execută o mişcare de
rotaţie şi realizează o forţă F, în zona frontală a capătului de arbore, prinintermediul lagărului axial (3). Pârghiile (4), solidar legate, în mişcare detranslaţie, de piuliţa (2), realizează extragerea inelului rulmentului de pe
capătul de arbore. Prin intermediulbraţului (5), solidar cu piuliţa (2), sepoate realiza şi o deplasare apârghiilor (4), pe direcţia acestuibraţ, fapt ce face posibilă utilizareapresei la extragerea inelelor derulmenţi de diferite mărimi.
1.2.15. Platformă de ridicat.
Structural, mecanismul deacţionare al platformei din fig. 1.22este identic cu cel al cricului cupârghii cu o piuliţă (v. fig. 1.8). Pe
Fig. 1.21
Fig. 1.22

30 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
şurubul (1), solidar cu mecanismul de acţionare, sunt plasate piuliţa (2) şilagărul radial-axial (3). Legătura cu placa superioară (4) şi elementul fix (5)se realizează prin pârghiile superioare (6), respectiv prin cele inferioare (7).Încărcarea şurubului se stabileşte în urma studiului static al întreguluimecanism.
1.2.16. Menghine cu şurub.Menghinele prezentate în fig. 1.23, în patru variante, sunt acţionate
tot prin mecanisme şurub-piuliţă. La variantele din fig. 1.23 a şi b, şurubul(1) este elementul căruia i se ataşează mecanismul de acţionare şi careexecută mişcarea de rotaţie, piuliţa (2), executând mişcarea de translaţie. Laaceste variante, piuliţele sunt legate solidar cu falca mobilă (3), prindeplasarea axială a acestora, realizându-se strângerea între falca mobilă (3)şi falca fixă (4). Şuruburile sunt solicitate la tracţiune, (fig. 1.23 a) sau lacompresiune (fig. 1.23 b). Varianta prezentată în fig. 1.23 c are ca elementconducător piuliţa (2), care se roteşte, fiind legată solidar de mecanismul de
Fig. 1.23

Capitolul 1. Mecanisme cu şuruburi de forţă 31
acţionare. Şurubul (1) este legat solidar de falca mobilă (3) şi execută –împreună cu aceasta – mişcarea de translaţie şi implicit strângerea între falcamobilă (3) şi falca fixă (4). La varianta din fig. 1.23 d, pe şurubul (1), legatsolidar de mecanismul de acţionare, şi care execută mişcarea de rotaţie, suntplasate piuliţele (2). Acestea se deplasează axial, în sens contrar, şurubulavând cele două porţiuni filetate în sensuri diferite. De cele două piuliţe suntlegate fălcile mobile (3) şi (3 ), între care se realizează strângerea. Lavariantele din fig. 1.23 c şi d, şurubul este solicitat la tracţiune.
1.2.17. Cheie de strângere cu şurub.Schema prezentată în fig. 1.24 reprezintă o cheie de strângere cu
şurub, cunoscută subdenumirea de cheie franceză.Şurubul (1), fixat de falcamobilă (3), execută – împreunăcu aceasta – o mişcare detranslaţie. Piuliţa (2), acţionatăcu mâna, execută mişcarea derotaţie. Strângerea se realizeazăîntre falca mobilă (3) şi falcafixă (4).
1.2.18. Ancoră reglabilă.Ancora reglabilă din fig. 1.25 este realizată tot cu un mecanism
şurub-piuliţă. Carcasa piuliţelor(2) şi ( 2 ), filetată în sensuridiferite, constituie elementulmotor, care execută mişcareade rotaţie. Şuruburile (1) şi (1 )execută mişcarea de translaţie,deplasându-se în sensuricontrare, realizându-se astfelforţe de ancorare F la distanţedorite.
1.2.19 Tije filetate pentru robinete.Tijele cu filet sunt acţionate de un moment Mm, a cărui mărime
trebuie să fie astfel determinată, încât să depăşească momentele rezistentedatorită frecărilor în diferite porţiuni ale tijei (la etanşarea trecerii tijei princapac, la gulerul de sprijin etc.) şi să creeze o forţă axială F suficientă pentru
Fig. 1.24
Fig. 1.25

32 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
asigurarea etanşeităţii organelor de închidere ale robinetului şi învingereafrecărilor auxiliare.
Astfel, la tijele filetate ascendente cu mişcare de translaţie (fig. 1.26)se pot scrie relaţiile:
fge FFF (1.15)
fitm MMM 1 (1.16)
La tijele filetate neascendente cu mişcare de rotaţie (fig. 1.27):eFF (1.17)
fgfitm MMMM 1 (1.18)
La tijele ascendente cu mişcare de rotaţie (fig. 1.28):
mfge sinFFF (1.19)
fsmfgtm McosMMM 1 (1.20)
În expresiile de mai sus s-au folosit notaţiile:Fe – forţa maximă din capul tijei necesară creării etanşeităţii între
organele de închidere ale robinetului;Ffg – forţa de frecare dintre tijă şi garnitura cutiei de etanşare;Mt1 – momentul necesar învingerii frecărilor între spirele filetului
şurubului şi piuliţei la strângere:
22
1 2tg
dFM t (1.21)
Fig. 1.26

Capitolul 1. Mecanisme cu şuruburi de forţă 33
unde:
2 – unghiul mediu de înclinare a spirei filetului;d2 – diametrul mediu al filetului, mm;
Fig. 1.27
Fig. 1.28

34 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
2cos
arctgarctg 11
– unghiul de frecare dintre spirele
filetului tijei şi piuliţei. Valorile coeficientului de frecare 1 se iau dintabelul 1.1.
Mfi – momentul de frecare înlagărul axial inelar (la gulerul bucşei)(fig. 1.29 a):
2mi
ifid
FM , N.mm (1.22)
în care:F – forţa axială pe lagăr, N;dmi – diametrul mediu al
inelului, mm;i – coeficientul de frecare pe
inel, a cărui valoare se poate lua din tabelul 1.2.Tabelul 1.1
Materialultijei
Materialulpiuliţei
Filet în afaramediului cuungere bună
Filet în afaramediului cuungere slabă
Filet îninteriorul
construcţiei(în mediu)
Oţelbronz, alamă,
fontă0,15 0,17 0,20 – 0,25
oţel 0,20 0,25 0,30 – 0,35mase plastice 0,10 0,12 –
Tabelul 1.2Materialul Coeficientul
de frecare, iUmărul SprijinulOţel Bronz 0,20Oţel Fontă 0,22Oţel Oţel 0,30
Alamă Fontă 0,20Mfs – momentul de frecare în capul tijei (crapodină sferică - fig. 1.29
b):
ssfs dF,M 250 , N.mm (1.23)
în care:
32
761E
RF,d s
s , mm (1.24)
Fig. 1.29

Capitolul 1. Mecanisme cu şuruburi de forţă 35
ds – diametrul zonei de contact a capacului sferic, mm;Rs – raza capului sferic, mm;F – forţa axială în lagăr, N;E – modulul de elasticitate al materialului; MPa1015,2 5E .
s – coeficientul de frecare al materialelor în contact. De obicei3,0s .
Mfg – momentul de frecare între tijă şi garnitura cutiei de etanşare,mmN .
Pentru preluarea tuturor forţelor neglijabile, de care nu s-a ţinutseama în relaţiile de mai înainte, precum şi pentru a acoperi neconcordanţeleîntre coeficienţii aleşi şi cei reali, se recomandă majorarea momentului Mm
de acţionare a tijei cu circa 25 %.
1.2.20. Şuruburi conducătoare pentru strunguri.Distribuţia forţelor şi a momentelor diferă în funcţie de poziţia
lagărului axial, care preia forţa axială din şurub F (fig. 1.30). În acest sens sevor analiza diferite variante. Notaţiile în această figură au următoarelesemnificaţii:
Mt1 – momentul de frecare între spirele piuliţei şi şurubului;Mt2 – momentul de frecare în lagărul radial din dreapta;Mt3 – momentul de frecare în lagărul axial;Mt4 – momentul de frecare în lagărul radial din stânga.
I. Ambele lagăre axiale sunt aşezate lângă lagărul radial dinstânga.
Se deosebesc două cazuri:1. Şurubul asigură deplasarea piuliţei spre dreapta; variaţia forţelor
şi momentelor în diferite porţiuni este prezentată în fig. 1.30 a.Porţiunile cele mai solicitate sunt:- porţiunea a – b este solicitată la torsiune, datorită momentului Mtot
şi la încovoiere, datorită forţelor de la roata dinţată;- porţiunea c – d solicitată la compresiune, datorită forţei F, la torsiune,datorită momentului Mt1 + Mt2, şi la încovoiere, datorită forţelor de la roatadinţată.
2. Şurubul asigură deplasarea piuliţei spre stânga; variaţia forţelor şimomentelor în diferite porţiuni este prezentată în fig. 1.30 b.
Porţiunile cele mai solicitate sunt:- porţiunea a – b este solicitată la torsiune, datorită momentului Mtot,
şi la încovoiere, datorită forţelor de la roata dinţată;

36 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Fig. 1.30

Capitolul 1. Mecanisme cu şuruburi de forţă 37
- porţiunea b – c, solicitată la compresiune, datorită forţei F, larăsucire, datorită momentului Mt1 + Mt2 + Mt4, şi la încovoiere, datorităforţelor de la roata dinţată.
II. Lagărele axiale sunt aşezate lângă fiecare lagăr radial, la parteainterioară.
Şi aici sunt două cazuri:1. Şurubul asigură deplasarea piuliţei spre dreapta; variaţia forţelor
şi momentelor în diferite porţiuni este prezentată în fig. 1.30 c.Porţiunile cele mai solicitate sunt:- porţiunea a – b, solicitată la răsucire, datorită Mtot şi la încovoiere,
datorită forţelor de la roata dinţată;- porţiunea c – d, solicitată la torsiune, datorită momentului Mt1 +Mt2,
la compresiune, datorită forţei F şi la încovoiere, datorită momentului deîncovoiere de la roata dinţată.
2. Şurubul asigură deplasarea piuliţei spre stânga; variaţia forţelor şimomentelor în diferite porţiuni este dată în fig. 1.30 d.
Porţiunile cele mai solicitate sunt:- porţiunea a – b solicitată la torsiune, datorită momentului Mtot, şi la
încovoiere, datorită forţelor de la roata dinţată;- porţiunea d – e solicitată la torsiune, datorită momentului
Mt1+Mt2+Mt3,, la compresiune, datorită forţei F şi la încovoiere, datorităforţelor de la roata dinţată.
III. Lagărele axiale sunt aşezate lângă fiecare lagăr radial la parteaexterioară.
Există şi aici două cazuri:1. Şurubul asigură deplasarea piuliţei spre dreapta; variaţia forţelor
şi momentelor în diferite porţiuni este dată în fig. 1.30 e.Porţiunile cele mai solicitate sunt:- porţiunea a – b este solicitată la torsiune, datorită momentului Mtot, şi
la încovoiere, datorită forţelor de la roata dinţată;- porţiunea d – e este solicitată la torsiune, datorită momentului
Mt1+Mt2+Mt3, la compresiune, datorită forţei F şi la încovoiere, datorităforţelor de la roata dinţată.
2. Şurubul asigură deplasarea piuliţei spre stânga; variaţia forţelor şia momentelor în diferite porţiuni este prezentată în fig. 1.30 f.
Porţiunile cele mai solicitate sunt:- porţiunea b – c este solicitată la torsiune, datorită momentului
Mt1+Mt2+Mt4, la compresiune, datorită forţei F şi la încovoiere datorităforţelor de la roata dinţată.

CAPITOLUL 2
ŞURUBURI DE FORŢĂ CU ALUNECARE
2.1. FILETE PENTRU ŞURUBURI DE FORŢĂ CUALUNECARE.
2.1.1. Consideraţii generale.Pentru clasificarea acestor filete, se au în vedere diverse criterii: forma
profilului generator, mărimea pasului, numărul de începuturi, sensul deînfăşurare al spirei.
Pentru şuruburile de forţă se utilizează, în exclusivitate filetul cilindriccu profil pătrat, trapezoidal, ferăstrău şi rotund executat cu pas normal, maresau fin, sistemul de măsurare fiind sistemul metric.
Pasul normal şi fin asigură, în general, condiţia de autofrânare. Pasulfin asigură o deplasare axială mică la o rotaţie completă, reduce înălţimeafiletului, mărind diametrul interior şi implicit rezistenţa şurubului.
Mărimea pasului, pentru acelaşi diametru nominal, determinădiametrul interior, cu valori mai mari pentru paşi mici, cât şi unghiul deînclinare a spirei, mai mic. În aceste condiţii, este îndeplinită condiţia deautofrânare la paşi mici şi rezistenţa tijei şurubului este mare, datorităsecţiunii mari a acestuia. Randamentul transmisiilor şurub–piuliţă cu filetecu paşi mici este scăzut, acesta crescând odată cu mărirea pasului. Trebuiemenţionat că randamentul acestor transmisii este influenţat şi de alegereacorectă a cuplului de materiale (prin care se defineşte coeficientul de frecareμ), de precizia de execuţie şi de calitatea suprafeţelor de contact.
În fig. 2.1 se prezintă dependenţa randamentului transmisiei şurub –
piuliţă ( 2
2
tg
tg;
22 d
ptg
, 2 fiind unghiul de înclinare a
spirei, la nivelul diametrului mediu d2;
2
cosarctg , fiind unghiul

Capitolul 2. Şuruburi de forţă cu alunecare 39
aparent de frecare; pentru filetul trapezoidal, unghiul profilului 030 ), în
funcţie de raportul2d
p
şi de trei valori ale coeficientului de frecare ,
domeniul ales pentru acesta ( 12,0...08,0 ) fiind uzual întâlnit la cupleleelicoidale ale cricurilor.
În figură sunt prezentate domeniile caracteristice filetelor cu pas fin,
normal şi mare, în funcţie de raportul2d
p
şi limitele valorilor acestui
raport până la care este îndeplinită condiţia de autofrânare (definită prin
relaţia 2 , respectiv
tgd
ptg
22 ): A – pentru 08,0 , B –
pentru 1,0 şi C – pentru 12,0 .Se observă că pentru pasul fin condiţia de autofrânare este îndeplinită în
totalitate, deoarece valoarea maximă a raportului2d
p
este mai mică decât
valoarea minimă a coeficientului de frecare
080070
2,,
d
p
max
.
În cazul pasului normal, la care raportul2d
p
este cuprins în domeniul
11500402
,d
p,
, condiţia de autofrânare este respectată pentru
Fig. 2.1

40 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
coeficienţii de frecare mari
1150120
2,
d
p,
max
şi parţial pentru
valori mai mici ale acestora.La filetele cu pas mare, deoarece valoarea minimă a raportului este
0702
,d
p
min
, un număr mic de filete îndeplinesc condiţia de
autofrânare, dacă coeficientul de frecare are valoarea minimă 08,0 ,existând şi situaţii în care condiţia de autofrânare nu este îndeplinită chiarpentru coeficienţi de frecare mari ( 12,0 ), datorită mărimii pasului,
raportul2d
p
depăşind această valoare.
La filetele cu două sau mai multe începuturi, pentru determinareaunghiului α2 se va face raportul între cursa axială, identică cu pasul elicei pz,şi produsul 2d ( ppz x numărul de începuturi, p fiind pasul profilului),
adică2
2 d
pz
. Aceste filete au un randament al transmisiei şurub –
piuliţă superior filetelor cu un început, realizează o deplasare axială rapidă,dar nu îndeplinesc condiţia de autofrânare, fapt pentru care nu sunt folositela mecanismele de ridicat.
Deplasările axiale, la o rotaţie completă a şurubului, depind demărimea pasului, fiind mici la paşi mici şi mari la paşi mari. Ar fiavantajoasă, din acest punct de vedere, alegerea paşilor mari, utilizareaacestora fiind însă limitată din considerentele de mai sus.
Numărul de spire ale piuliţei creşte odată cu micşorarea pasului,ajungându-se la piuliţe cu număr mare de spire, soluţie neagreată tehnic,datorită repartiţiei neuniforme a sarcinii pe spirele piuliţei.
Având în vedere cele prezentate, pentru cricuri se recomandăutilizarea filetului trapezoidal cu pas normal, care îndeplineşte cel mai bineo mare parte din condiţiile impuse acestor transmisii.
Se precizează faptul că filetul trapezoidal este cel mai utilizat filet demişcare, datorită multiplelor avantaje pe care le prezintă, fapt pentru careeste prezentat în detaliu conform SR ISO 2901, 2902, 2903 şi 2904.
2.1.2. Filetul pătrat.Are unghiul de profil egal cu zero şi realizează randamentul maxim
în comparaţie cu celelalte profile.

Capitolul 2. Şuruburi de forţă cu alunecare 41
Acest tip de filet are adâncimea şi înălţimea filetului egală cu 2/p .Jocul radial este prevăzut între vârful filetului şurubului şi fundul filetuluipiuliţei. Elementele profilului nominal sunt redate în fig. 2.2, iar
dimensiunile nominale ale filetului pătrat în domeniul d = 10...100 mm suntindicate în anexa 2.
Filetul pătrat are utilizare limitată datorită apariţiei jocului axial caurmare a uzurii flancurilor. Eliminarea acestui joc impune schimbareapiuliţei sau utilizarea a două piuliţe cu suprafeţe înclinate. Prezenţa joculuiaxial duce la apariţia şocurilor la schimbarea sensului de rotaţie.
Filetul pătrat nu asigură o centrare suficientă a piuliţei în raport cuşurubul datorită jocului radial existent la exteriorul profilului.
Ca dezavantaje ale acestui tip de filet se mai amintesc: rezistenţă şirigiditate a spirei scăzute, prelucrarea prin frezare şi rectificare se poate facenumai în condiţii speciale.
Filetul pătrat este recomandat pentru transmiterea sarcinilor relativmici care lucrează într-un singur sens, fără şocuri şi vibraţii, în situaţiilecând se cere asigurarea unui randament mare a mecanismelor cu şurub –piuliţă.
Filetul pătrat nu este standardizat în prezent. Valori orientativepentru elementele geometrice pot fi alese din anexa 2.
2.1.3. Filetul trapezoidal.Profilul de bază (SR ISO 2901) este profilul teoretic corespunzător
dimensiunilor de bază şi anume: diametrul interior, diametrul mediu şidiametrul exterior (fig. 2.3).
Profilele reale ale filetelor şurubului (exterior) şi piuliţei (interior),numite în SR ISO 2901 profilele la maximum de material, au dimensiunileprezentate în fig. 2.4 – profilele cu joc la fundul filetului (ac) şi fără joc pe
Fig. 2.2

42 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
flancuri şi în fig. 2.5 – profilele cu joc la fundul filetului (ac) şi cu joc peflancuri (s/2).
Unghiul profilului filetului este β = 30°.
Relaţiile de calcul :p,H 501 ; cadD 24 ;
34 50 hap,H c ; pdHdD 11 2 ;
2250 1H
p,z ; ac = 0,15 mm pentru p = 1,5 mm;
cmax a,R 501 ; ac = 0,25 mm pentru 2 p 5 mm;
p,H 8661 ; ac = 0,5 mm pentru 6 p 12 mm;
Fig. 2.3
Fig. 2.4

Capitolul 2. Şuruburi de forţă cu alunecare 43
caR max2 ; ac = 1 mm pentru 14 p 44 mm.
p,dzdDd 50222 ;
capdhdd 22 33 ;
d – diametrul nominal al filetului.
Filetul trapezoidal are o rezistenţă şi o rigiditate mai mare ca filetulpătrat. Folosirea piuliţei reglabile radial (secţionată) permite eliminareajocului axial creat în urma uzurii flancurilor, avantaj care impune filetultrapezoidal ca principală soluţie pentru mecanismele şurub – piuliţă.
Filetul trapezoidal asigură o bună centrare între şurub şi piuliţă şi sepoate executa prin procedeul de frezare (care este foarte productiv).
În cazul mecanismelor cu şurub şi piuliţă care transmit sarcini mari,în ambele sensuri, direcţia forţei fiind variabilă (sau cu şoc), se recomandăutilizarea filetelor trapezoidale.
Combinaţiile posibile diametre nominale – paşi sunt prezentate înSR ISO 2902 şi SR ISO 2904, pentru filetele metrice trapezoidale ISO,având profilul de bază definit în SR ISO 2901 (v. fig. 2.3).
Dimensiunile de bază pentru filetele metrice trapezoidale ISO, dupăSR ISO 2904, sunt date în anexa 3.
Diametrele nominale sunt plasate pe trei şiruri, recomandându-sefolosirea celor din şirul 1 (notat îngroşat în anexa 3) şi dacă este necesar şişirul 2. Pentru diametrul nominal sunt prezentaţi doi sau trei paşi (fin şinormal, respectiv fin, normal şi mare, pasul normal fiind prezentat îngroşatîn anexa 3, recomandându-se folosirea paşilor normali).
Fig. 2.5

44 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Notare: Filet trapezoidal cu un singur început, filet dreapta: Tr d x p (de
exemplu, Tr 28 x 5); Filet trapezoidal cu două începuturi, filet dreapta: Tr d x pz (p) de
exemplu, Tr 28 x 10 (p5)) ; Filetul trapezoidal pe stânga se notează adăugând după simbolul
filetului grupul de litere LM: Tr d x p LM (de exemplu, Tr 28 x 5LM).
Notarea completă a unui filet, conform SR ISO 2903, trebuie săcuprindă o notare pentru simbolul filetului şi dimensiunile acestuia şi onotare pentru toleranţa filetului.
Notarea toleranţei cuprinde numai un simbol corespunzătortoleranţei la diametrul mediu. Nu este necesar să se noteze toleranţele ladiametrele de vârf, deoarece pentru D1 şi d este specificată o singură treaptăde precizie, poziţia toleranţei fiind întotdeauna aceeaşi.
Notarea toleranţei trebuie să cuprindă o cifră, care indică treapta deprecizie pentru diametrul mediu şi o literă, care indică poziţia toleranţei ladiametrul mediu – majusculă pentru filetul interior (al piuliţei) şi obişnuităpentru filetul exterior (al şurubului).
Astfel, pentru un filet trapezoidal cu diametrul nominal de 40 mm şipasul de 7 mm, filetul fiind dreapta, cu un singur început, simbolurile princare vor fi definite elementele componente şi toleranţele pentru piuliţă,şurub şi ajustajul filetat sunt:
pentru piuliţă (filet interior): Tr 40 x 7 – 7H; pentru şurub (filet exterior): Tr 40 x 7 – 7e; pentru ajustajul filetat: Tr 40 x 7 – 7H/7e.
Observaţie:Poziţia toleranţelor pentru filetul piuliţei şi al şurubului şi abaterile
fundamentale pentru diametrele caracteristice, precum şi notarea completă afiletelor sunt prezentate în § 2.3.1.
2.1.4. Filetul ferăstrău.Are profilul asimetric trapezoidal (fig. 2.6). Poate prelua sarcini
numai într-un singur sens. Flancul activ are o înclinare (tehnologică) de 3°.Fundul filetului este executat cu o rază de racordare mare, iar înălţimea realăde contact este de p,H 7501 . Filetul ferăstrău îmbină avantajele filetuluipătrat şi trapezoidal şi anume:
- are rezistenţă şi rigiditate mare a spirei;- asigură centrarea bună a piuliţei faţă de şurub;- randamentul este apropiat de cel al filetului pătrat;

Capitolul 2. Şuruburi de forţă cu alunecare 45
- se poate executa prin frezare;- concentratorul de tensiune la fundul filetului este relativ mic datorită
razei mari de racordare.
Filetul ferăstrău este prezentat în fig. 2.6 şi are dimensiunilestandardizate în STAS 2234/1-75 putând fi executat cu pas normal, fin saumare.
Relaţiile de calcul:d = D = diametrul nominal al filetului;
p,dHdD 512 11 ; p,ac 117770 ;
p,ddD 75022 ; p,a 10 ;
33 2 hdd ; p,w 263840 ;
p,H 7501 ; awe ;p,H 58781 ; p,R 124270 ;
p,aHh e 86777013 .
Gama de dimensiuni nominale în domeniul d = 10 ... 100 mm, înconformitate cu STAS 2234/2-75, este indicată în anexa 4.
Filetul ferăstrău este utilizat la şuruburi ce preiau sarcini mari,variabile şi cu şoc, într-un singur sens (ex. în construcţia preselor grele etc).
Notare: Filet fierăstrău cu un început, filet drept: S d x p (de exemplu,
S 36 x 5). Filet ferăstrău cu mai multe începuturi: S d x pz(p) (de exemplu,
S 36 x 12 (p6)). Filet fierăstrău stânga, cu un început: S d x p LM (de exemplu,
S 36 x 6 LM). Filet ferăstrău stânga, cu două începuturi: S d x pz (p) LM (de
exemplu, S 36 x 12 (p6) LM).
Fig. 2.6

46 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Notarea completă a filetului ferăstrău, cu indicarea câmpului detoleranţă, se face conform STAS 2234/3.
Câmpul de toleranţă se notează prin simbolul câmpului de toleranţăal diametrului mediu. Simbolul câmpului de toleranţă se plasează dupăsimbolul filetului (notat mai înainte) şi despărţită de acesta printr-o liniuţă.
Astfel, pentru filetul interior, notaţia este S d x p – 7H (de exemplu,S 36 x 6 – 7H), pentru filetul exterior este S d x p – 7c (de exemplu, S 36 x 6– 7c) şi pentru ajustajul filetat (şurub-piuliţă) este S d x p – 7H/7c (deexemplu, S 36 x 6 – 7H/7c).
Observaţie:Toleranţele la diametrele medii (TD2,Td2) şi la diametrele interioare
(TD1,Td3) sunt aceleaşi ca la filetul trapezoidal (v. § 2.3.2).
2.1.5. Filetul rotund.Are profilul realizat din arce de cerc racordate prin drepte înclinate,
flancurile formând un unghi de 30°, centrarea fiind pe flancuri (fig. 2.7).
Elementele geometrice ale filetului, se calculează cu relaţiile:p,t 8661 ; 683,0b ;
p,t 501 ; p,r 23850 ;
p,t 083502 ; p,r 25557901 ;
p,a 050 ; p,r 22101 .Este un caz particular al filetului trapezoidal faţă de care prezintă
următoarele avantaje:- rezistenţă sporită la oboseală ca urmare a eliminării concentrării
tensiunii la fundul filetului datorită razelor de racordare mari;- funcţionarea mai sigură şi durabilitatea sporită în condiţii
nefavorabile de exploatare (praf, nisip, noroi, apă, zăpadă, etc.);- montarea uşoară dată de lipsa muchiilor.
Fig. 2.7

Capitolul 2. Şuruburi de forţă cu alunecare 47
Filetul rotund normal (STAS 668-86) are joc la fund şi la vârf.Se utilizează la mecanisme supuse la sarcini dinamice mari cu
înşurubări şi deşurubări repetate în prezenţa impurităţilor.Notare:
Filet rotund cu un început, filet dreapta: Rd d x p (de exemplu,Rd 40 x 4,233). Filet rotund cu două începuturi, filet dreapta: Rd d x pz (p)
(de exemplu, Rd 40 x 8,466 (P 4,233)).Profilul filetului rotund şi dimensiunile nominale, conform STAS
668-86 sunt redate în anexa 5.
2.2. ALEGEREA PROFILULUI FILETULUI.
Pentru şuruburile de mişcare alegerea profilului filetului se face,ţinând seama de următoarele criterii:
- caracterul sarcinii transmise (variabilă, constantă, etc.);- mărimea sarcinii de transmisie (mică, mare, etc.);- direcţia şi sensul sarcinii de transmis;- destinaţia mecanismului şi condiţii de lucru;- randamentul impus mecanismului.În acest sens se pot utiliza recomandările din tabelul 2.1.
Tabelul 2.1.Tipul
filetuluiSTAS Se recomandă la:
Pătrat –Forţe mici şi medii de direcţieconstantă acţionând într-un singursens; randament ridicat.
TrapezoidalSR ISO
2904
Forţe mari de direcţie variabilăacţionând în ambele sensuri;randament mai mic cu 4-5% decâtfiletul pătrat.
Ferăstrău 2234-75
Forţe mari, variabile şi cu şocacţionând într-un singur sens; direcţiaforţei constantă; randamentcomparabil cu cel al filetului pătrat.
Rotund 668-86
Este un filet cu destinaţie specială;forţe dinamice mari; înşurubări şideşurubări repetate în condiţii grele delucru.

48 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
2.3. TOLERANŢE ŞI AJUSTAJE.
De la început se poate face menţiunea că tolerarea dimensiunilorfiletului interior şi exterior se impune în mod deosebit la şuruburileconducătoare ale maşinilor-unelte sau la mecanismele care au rolul de atransmite valori precise ale mişcării de translaţie.
La mecanismele şurub-piuliţă de uz general sistemul de toleranţe şiajustaje este standardizat în funcţie de tipul filetului. Aceste prescripţii nu seaplică la filetele cu exigenţe speciale: şuruburi conducătoare, şuruburi deavans, şuruburi pentru aparate etc.
Terminologia şi simbolurile ce vor fi utilizate în continuare suntconform STAS 8100/4-88 şi STAS 3872-83.
Câmpurile de toleranţă sunt definite prin poziţia şi mărimea lor.Abaterea limită se consideră de la profilul nominal al filetului interior şiexterior în direcţie perpendiculară pe axa filetului.
Temperatura de referinţă pentru măsurarea filetului este de 20 °C,conform STAS 1033-69.
2.3.1. Sistemul de toleranţe şi ajustaje al filetului trapezoidalISO.
Alegerea toleranţelor pentru filetele trapezoidale metrice şi notareaacestora este dată în SR ISO 2309. Se specifică faptul că simbolul careindică toleranţa se referă doar la toleranţa la diametrul mediu. La diametrelede vârf (D1, respectiv d) nu este necesară înscrierea toleranţelor deoareceeste specificată doar o treaptă de precizie (treapta 4) şi poziţia toleranţei esteaceeaşi.
Pentru alegerea şi notarea corectă a toleranţelor filetului trebuieparcurse etapele prezentate în continuare.
Poziţia toleranţelor în raport cu linia zero (dimensiuni de bază) esteprezentată în fig. 2.8.
Practic, poziţiile toleranţelor sunt standardizate pentru diametrulmediu:
Fig. 2.8

Capitolul 2. Şuruburi de forţă cu alunecare 49
- în cazul filetului piuliţei, poziţia toleranţei H, cu abatereafundamentală zero, este prezentată în fig. 2.9 cu menţiunea că poziţiatoleranţei la diametrul interior D1 şi la cel exterior D4 este totdeauna H,respectiv cu abaterea fundamentală zero;
- în cazul filetului şurubului, poziţia toleranţelor c şi e, cu abatereafundamentală negativă, este prezentată în fig. 2.10, cu menţiunea că poziţiatoleranţei la diametrul exterior d şi la cel interior d3 este întotdeauna h,
respectiv cu abatere fundamentală zero, independent de poziţia toleranţei ladiametrul mediu.
Abaterile fundamentale la diametrul mediu al filetului şurubului şi lacel al piuliţei sunt prezentate în tabelul 2.2.
Fig. 2.9
Fig. 2.10

50 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 2.2
Pasul p
Abateri fundamentale
Piuliţă ŞurubD2 d2
H,
EI
c,
es
e,
es
mm μm μm μm1,5
0
-140 -67
2 -150 -71
3 -170 -85
4 -190 -95
5 -212 -106
6 -236 -118
7 -250 -125
8 -265 -132
9 -280 -140
10 -300 -150
12 -335 -170
14 -355 -180
16 -375 -190
18 -400 -200
20 -425 -212
Pentru definirea mărimii câmpurilor de toleranţe, pentru diverselediametre ale filetului trapezoidal ISO, se stabilesc treptele de precizie,prezentate în tabelul 2.3. Se remarcă faptul că treapta de precizie pentrudiametrul interior al filetului şurubului (d3) este întotdeauna aceeaşi cu ceapentru diametrul mediu (d2), fără însă ca valorile Td3 şi Td2 să fie identicepentru o aceeaşi treaptă de precizie (v. tabelul 2.9) deoarece:
esT,T dd 23
251 (2.1)
Tabelul 2.3Diametre Treapta de precizie
Diametrul interior al filetului piuliţei D1 4Diametrul exterior al filetului şurubului dDiametrul mediu al filetului piuliţei D2
7; 8; 9Diametrul mediu al filetului şurubului d2
Diametrul interior al filetului şurubului d3

Capitolul 2. Şuruburi de forţă cu alunecare 51
Toleranţele trebuie alese în funcţie de clasele de precizie (tabelul2.4) şi lungimile de înşurubare: normale (N) şi lungi (L) (tabelul 2.5). Dacălungimea de înşurubare nu este cunoscută, se recomandă lungimea N.
Tabelul 2.4
Clasă deprecizie
Toleranţe la diametrul mediu, pentruPiuliţe Şuruburi
N L N LMijlocie 7H 8H 7e 8e
Grosolană 8H 9H 8c 9c
Tabelul 2.5Diametrul exterior de
bază, d Pasulp
Lungimi de înşurubare, lN L
De la(exclusiv)
Până la(inclusiv)
De la(exclusiv)
Până la(inclusiv)
Peste(exclusiv)
11,2 22,4
2 8 24 243 11 32 324 15 43 435 18 53 538 30 85 85
22,4 45
3 12 36 365 21 63 636 25 75 757 30 85 858 34 100 10010 42 125 12512 50 150 150
45 90
3 15 45 454 19 56 568 38 118 1189 43 132 13210 50 140 14012 60 170 17014 67 200 20016 75 236 23618 85 265 265
Dimensiunile sunt date în mm.

52 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Toleranţele pentru filetele cu mai multe începuturi (vezi fig. 2.11)sunt egale cu cele pentru filetele cu un singur început, cu excepţiatoleranţelor la diametrul mediu, care sunt mărite.
Astfel, valorile toleranţelor TD2 şi Td2 specificate în tabelul 2.7 sestabilesc prin înmulţirea cu factorii indicaţi în tabelul 2.6.
Tabelul 2.6Numărul de începuturi 2 3 4 5 şi pesteFactor de multiplicare 1,12 1,25 1,4 1,6
Tabelul 2.7Diametrul exterior de
bază d, mm PasulP, mm
Toleranţă, μmTD2 Td2
de la(exclusiv)
până la(inclusiv)
Treapta de precizie7 8 9 7 8 9
11,2 22,4
2 265 335 425 200 250 3153 300 375 475 224 280 3354 355 450 560 265 335 4005 375 475 600 280 355 4508 475 600 750 355 450 560
22,4 45
3 335 425 530 250 315 4005 400 500 630 300 375 4756 450 560 710 335 425 5307 475 600 750 355 450 5608 500 630 800 375 475 60010 530 670 850 400 500 63012 560 710 900 425 530 710
45 90
3 355 450 560 265 335 4254 400 500 630 300 375 4758 530 670 850 400 500 6309 560 710 900 425 530 67010 560 710 900 425 530 67012 630 800 1000 475 600 75014 670 850 1060 500 630 80016 710 900 1120 530 670 85018 750 950 1180 560 710 900
Fig. 2.11

Capitolul 2. Şuruburi de forţă cu alunecare 53
Tabelul 2.8
Pasul P,mm
Toleranţa, μmTD1 Td
Treapta de precizie 42 236 1803 315 2364 375 3005 450 3356 500 3757 560 4258 630 4509 670 50010 710 53012 800 60014 900 67016 1000 71018 1120 800
Tabelul 2.9
Diametrul exterior de bazăd, mm Pasul
p,mm
Toleranţă Td3, μmPoziţia câmpului de toleranţă la diametrul mediu
c ede la
(exclusiv)până la
(inclusiv)Trepte de precizie
7 8 9 7 8 9
11,2 22,4
2 400 462 544 321 383 4653 450 520 614 365 435 5294 521 609 690 426 514 5955 562 656 775 456 550 6698 709 828 965 576 695 832
22,4 45
3 482 564 670 397 479 5855 587 681 806 481 575 7006 655 767 899 537 649 7817 694 813 950 569 688 8258 734 859 1015 601 726 88210 800 925 1087 650 775 93712 866 998 1223 691 823 1048
45 90
3 501 589 701 416 504 6164 565 659 784 470 564 6898 765 890 1052 632 757 9199 811 943 1118 671 803 97810 831 963 1138 681 813 988

54 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Toleranţele pentru diametrele caracteristice, urmărind şi treptele deprecizie din tabelul 2.3, sunt prezentate tabelar:
- toleranţele la diametrul mediu, pentru filetele piuliţei (TD2) şi cele aleşurubului (Td2), sunt date în tabelul 2.7, pentru treptele de precizie 7, 8 şi 9;
- toleranţele la diametrul interior al piuliţei (TD1) şi la diametrulexterior al şurubului (Td) sunt date în tabelul 2.8, pentru ambele fiindprevăzute aceeaşi treaptă de precizie 4;
- toleranţele de diametru interior (Td3), pentru câmpurile de toleranţă cşi e, în treptele de precizie 7, 8 şi 9, sunt date în tabelul 2.9.
Etapele ce trebuie parcurse pentru stabilirea unui ajustaj filetat şi atoleranţelor la filetul exterior şi interior sunt următoarele:
- stabilirea clasei de execuţie a filetului;- stabilirea lungimii de înşurubare (tabelul 2.5);- stabilirea treptei de precizie pentru filetul interior şi exterior
(tabelele 2.3);- alegerea câmpurilor de toleranţă a filetului interior şi exterior
(tabelul 2.4) şi prescrierea ajustajului;- determinarea abaterilor fundamentale (tabelul 2.2);- alegerea toleranţelor la diametrele filetului interior şi exterior
(tabelul 2.7 ... 2.9);- alegerea factorului de multiplicare pentru filetele cu mai multe
începuturi (fig. 2.6);
Exemplu de determinare (alegere şi notare) a toleranţelor.Ajustajul filetat este: Tr 24 x 5 – 8H/8e (conform tabelului 2.4).
Filetul şurubului (exterior): Tr 24 x 5 – 8e
Tes
es
T - toleranţa la diametrul pentru care se calculează abaterile.- diametrul exterior: esd = 0, pentru câmpul de toleranţă h, iar
mm335,0m335Td , conform tabelului 2.8.
0335024 ,
- diametrul mediu: mm,mesd 10601062 , pentru câmpul de
toleranţă e (tabelul 2.2) şi mm,mTd 37503752
pentru treapta de
precizie 8 (tabelul 2.7).
1060481050021 ,,,
- diametrul interior: 03 des , pentru câmpul de toleranţă h, iarmTd 575
3 pentru câmpul de toleranţă 8e (tabelul 2.9).

Capitolul 2. Şuruburi de forţă cu alunecare 55
0575,0500,18
Filetul piuliţei (interior): Tr 24 x 5 – 8H
EI
TEI.
- diametrul interior: 01 DEI (fig. 2.8) pentru câmpul de toleranţă H,iar mTD 450
1 (tabelul 2.8).
450,00000,19
- diametrul mediu: 02 DEI pentru câmpul de toleranţă H, iarm500T
2D (tabelul 2.6).
500,00500,21
Dacă filetul ar fi cu două începuturi e8/H85p1024Tr dimensiunile tolerate ar fi aceleaşi cu excepţia diametrului mediu (tabelul2.6).
mm410,012,1375,0T2
d , deci:
106,0516,0500,21
mm560,012,1500,0T2
D , deci:
560,00500,21
2.3.2. Sistemul de toleranţe al filetului ferăstrău.Sistemul de toleranţe al filetului ferăstrău este standardizat prin
STAS 2234/3-75, pentru filete cu profilul nominal conform STAS 2234/1-75 (fig. 2.12).
Poziţiile câmpurilor de toleranţă faţă de profilele nominale alefiletului se stabilesc prin abaterile fundamentale Ai (pentru filetul interior) şias (pentru filetul exterior).
Fig. 2.12

56 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Sunt indicate următoarele abateri fundamentale pentru :- diametrele filetului interior: H (fig. 2.12);- diametrele filetului exterior: h pentru diametrele d şi d3, c şi e pentru
d2 (fig. 2.13).
Tabelul 2.10
Pasulp, mm
Poziţia câmpului de toleranţăH c e h
Filet interior Filet exteriorD1, D2 , D d2 d, d3
Abateri fundamentale, μmai as
234
0
-150-170-190
-71-85-95
0
567
-212-236-250
-106-118-125
8910
-265-280-300
-132-140-150
121416
-335-355-375
-170-180-190
1820
-400-425
-200-212
Fig. 2.13

Capitolul 2. Şuruburi de forţă cu alunecare 57
Valorile abaterilor fundamentale pentru filetul interior şi exteriorsunt indicate în tabelul 2.10.
Treptele de precizie pentru diametrele filetului interior şi exteriorsunt indicate în tabelul 2.11.
Tabelul 2.11Diametrele filetului Treapta de precizie
InteriorD H 10D1 4D2
7; 8; 9Exterior
d3
d2
d h9
Toleranţele la diametrele D1, D şi d sunt redate în tabelele 2.12 şi2.13. Pentru diametrele d3, d2 şi D2 toleranţele se pot determina utilizândindicaţiile de la filetele trapezoidale (tabelele 2.7 şi 2.9).
Tabelul 2.12Pasul p,
mmTD1, μm
234
236315375
567
450500560
8910
630670710
121416
8009001000
1820
11201180
Tabelul 2.13Diametrul nominal,
d TDH10
Tdh9
Pestepână la
(inclusiv)mm m
61018
101830
587084
364352
305080
5080120
100120140
627487
Alegerea câmpurilor de toleranţă se face ca şi la filetul trapezoidal înfuncţie de clasa de execuţie a filetului şi lungimea de înşurubare.
Sunt stabilite aceleaşi clase de execuţie, şi anume:- mijlocie, de uz general;- grosolană, pentru cazurile în care execuţia se face în condiţii
tehnologice dificile.

58 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Lungimile de înşurubare sunt de asemenea două şi anume: normală(N) şi lungă (L), conform tabelului 2.5 de la filetele trapezoidale.
Dacă în momentul execuţiei filetului, lungimea de înşurubare nu estecunoscută ea se va încadra în grupul de lungimi normale.
Câmpurile de toleranţă preferenţiale vor fi alese conform indicaţiilordin tabelul 2.4, de la filetele trapezoidale.
Notarea câmpurilor de tolerantă şi ajustajelor filetate se va faceconform celor indicate la § 2.3.1.
Exemple: S 40 x 7 LH – 8H/8cS 40 x 14(P7) – 7H/7e
Şi la filetul ferăstrău câmpul de toleranţă se indică prin simbolulcâmpului de toleranţă al diametrului mediu (d2 sau D2).
La filetele cu mai multe începuturi toleranţele sunt egale cu cele alefiletului cu un singur început cu excepţia toleranţelor la diametrul mediu.Acestea se vor afla prin multiplicarea valorilor indicate în tabelul 2.7 cufactorul indicat în tabelul 2.6. Metodica de determinare a ajustajului şitoleranţelor este identică ca şi la filetul trapezoidal.
Exemple de calcul a toleranţelor.
Se determină ajustajul filetat:S 40 x 7 - 7H/7e
1. Filetul exterior: S 40 x 7 – 7e
Ta
a
s
s
T - reprezintă mărimea toleranţei referitoare la diametrul la care secalculează abaterile;
- diametrul exterior: 0dsa ; Td = 62 μm;
Ø 0062,040 ;
- diametrul mediu: 1252 dsa μm; Td2 = 355 μm;
Ø 125,0480,0750,34
;
- diametrul interior: 03 dsa ; Td3 = 569 μm;
Ø 0569,0852,27 .
2. Filetul interior: S 40 x 7 – 7H
i
i
A
TA
- diametrul interior: 01 DiA ; TD1 = 560 μm;

Capitolul 2. Şuruburi de forţă cu alunecare 59
Ø 5600050029 ,, ;
- diametrul mediu: 02 DiA ; TD2 = 475 μm;
Ø 4750075034 ,, ;
- diametrul exterior: 0DiA ; TD = 100 μm;
Ø 1000040 , .
2.3.3. Sistemul de toleranţe al filetului rotund.Poziţiile câmpurilor de toleranţă conform STAS 668-86 se stabilesc faţă
de profilul nominal al filetului prin abaterile fundamentale es pentru filetulexterior şi EI pentru filetul interior, conform figurii 2.14.
Abaterile limită la diametrele filetului interior şi exterior sunt indicateîn tabelul 2.14.
Abaterile ei şi ES la diametrele d3 şi D4 nu sunt standardizate.Valorile toleranţelor la diametrele filetului interior şi exterior sunt
indicate în tabelul 1.15.Lungimile maxime de înşurubare L se vor lua conform tabelului 2.16.Determinarea dimensiunilor tolerate se face în următoarea ordine:
- determinarea mărimii filetului;- determinarea abaterilor limită la diametrele filetului interior şi exterior
(tabelul 2.14);- determinarea toleranţelor conform tabelului 2.15;- determinarea dimensiunilor tolerate:
Ø d –Td ; Ø d2-Td2; Ø D1+TD1; Ø D2
+TD2;
Fig. 2.14
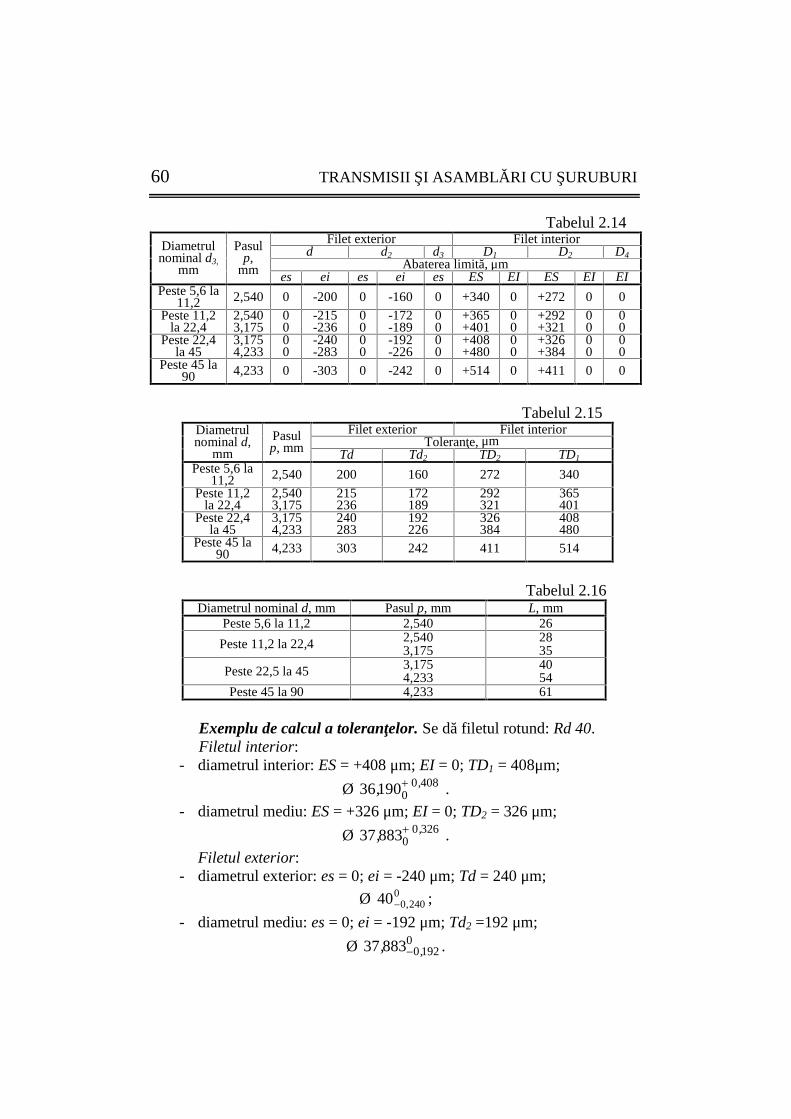
60 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 2.14
Diametrulnominal d3,
mm
Pasulp,
mm
Filet exterior Filet interiord d2 d3 D1 D2 D4
Abaterea limită, μmes ei es ei es ES EI ES EI EI
Peste 5,6 la11,2 2,540 0 -200 0 -160 0 +340 0 +272 0 0
Peste 11,2la 22,4
2,5403,175
00
-215-236
00
-172-189
00
+365+401
00
+292+321
00
00
Peste 22,4la 45
3,1754,233
00
-240-283
00
-192-226
00
+408+480
00
+326+384
00
00
Peste 45 la90 4,233 0 -303 0 -242 0 +514 0 +411 0 0
Tabelul 2.15Diametrulnominal d,
mmPasulp, mm
Filet exterior Filet interiorToleranţe, μm
Td Td2 TD2 TD1Peste 5,6 la
11,2 2,540 200 160 272 340
Peste 11,2la 22,4
2,5403,175
215236
172189
292321
365401
Peste 22,4la 45
3,1754,233
240283
192226
326384
408480
Peste 45 la90 4,233 303 242 411 514
Tabelul 2.16Diametrul nominal d, mm Pasul p, mm L, mm
Peste 5,6 la 11,2 2,540 26
Peste 11,2 la 22,4 2,5403,175
2835
Peste 22,5 la 45 3,1754,233
4054
Peste 45 la 90 4,233 61
Exemplu de calcul a toleranţelor. Se dă filetul rotund: Rd 40.Filetul interior:
- diametrul interior: ES = +408 μm; EI = 0; TD1 = 408μm;Ø 4080
019036 ,, .
- diametrul mediu: ES = +326 μm; EI = 0; TD2 = 326 μm;Ø 3260
088337 ,, .
Filetul exterior:- diametrul exterior: es = 0; ei = -240 μm; Td = 240 μm;
Ø 0240,040 ;
- diametrul mediu: es = 0; ei = -192 μm; Td2 =192 μm;Ø 0
192088337 ,, .

Capitolul 2. Şuruburi de forţă cu alunecare 61
2.4. MATERIALE UTILIZATE ÎN CONSTRUCŢIAMECANISMELOR CU ŞURUB ŞI PIULIŢĂ CUALUNECARE.
2.4.1. Materiale utilizate la execuţia şuruburilor de forţă şi apiuliţelor.
Pentru realizarea de mecanisme cu şurub şi piuliţă cu randamente câtmai bune, materialele transmisiei şurub-piuliţă trebuie să îndeplineascăurmătoarele condiţii de bază: comportare bună la frecare fără predispoziţii lagripaj, o bună rezistenţă la uzură, coeficient de frecare cât mai mic,înlocuirea materialelor deficitare, preţ de cost redus.
La definitivarea mărcii materialului pentru şurubul de forţă, se voravea în vedere următoarele:
- pentru şuruburi de mişcare supuse la solicitări mici şi mijlocii cuacţionare manuală se va opta pentru un oţel laminat: OL 37, OL 42, OL 50,OL 60 (STAS 500/2-80), care are caracteristici mecanice de rezistenţăacoperitoare, proprietăţi de prelucrare bună şi nu necesită tratament termic;
- în cazul şuruburilor de forţă supuse unor solicitări mijlocii şi mari sevor alege oţeluri de îmbunătăţire: OLC 35, OLC 45 (STAS 880-88), la carese va prescrie tratament termic de îmbunătăţire;
- în situaţia solicitărilor foarte mari şi cu condiţii severe de funcţionareeste indicată alegerea unor oţeluri carbon de calitate şi aliate: OLC 20,41Cr10, 33MoCr11, 21MoCr11, 13CrNi30, 18MoCrNi13, (STAS 791-88)la care se va prescrie un tratament termic (îmbunătăţire, cementare urmatăde călire, detensionare, nitrare ionică sau gazoasă, funcţie de calitateamaterialului). În cazul în care mecanismul cu şurub lucrează în mediu cutemperaturi înalte sau corosiv, iar solicitarea este mare se vor alege pentruşurubul de forţă oţeluri inoxidabile.
În tabelul 2.17 sunt prezentate (extrase din STAS) principalelecaracteristici mecanice pentru mărcile de oţel recomandate pentru fabricareaşuruburilor de forţă, iar tabelul 2.18 conţine valori ale rezistenţeloradmisibile pentru aceleaşi mărci de material.
Piuliţa ca element component al cuplei de frecare şurub-piuliţă dinmecanismele cu şurub, este indicat a fi astfel construită încât uzura să fieconcentrată asupra ei. Aceasta, deoarece prin dimensiunile şi configuraţiasa, piuliţa este o piesă mai puţin costisitoare, care poate fi înlocuită uşor. Înacest sens se recomandă ca materialul ales pentru piuliţă să aibă modulul de

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI62
Caracteristicile mecanice ale principalelor mărci de oţeluri(Extras din STAS) Tabelul 2.17
STASMarca
materialului
Clasa decalitate(trata-ment
termic)
Rezistenţala
tracţiuneRm,MPa
Limitade
curgere,Rpo,2,MPa
Alungi-rea la
rupere,A,%,min.
DuritateaBrinell
HB (min)informa-
tiv
500-
80
OL 32
OL 34
OL 37
OL 42
OL 50
OL 60
OL 70
1
1
1
1
1
1
1
310...390
330...410
360...440
410...490
490...610
590...710
min 690
170
200
230
250
280
320
380
33
31
25
22
21
16
11
-------
880-
82
OLC 15
OLC 20
OLC 25
OLC 45
OLC 45
OLC 50
OLC 50
Cr
CR
CR
CR
N
N
CR
590...780
490...640
540...690
700...840
min 610
min 640
740...870
350
310
360
480
360
370
510
14
20
19
14
18
18
14
----
235240
-
791-
80
15Cr 08
18Mn Cr10
18MoCrNi13
33MoCr11
Cr
Cr
Cr
CR
690...880
790..1080
930..1220
980..1180
410
540
690
780
11
10
9
12
174207217217
600-
82
OT 400
OT 450
OT 500
OT 600
1
1
1
1
390
440
490
590
200
240
280
350
20
18
15
10
110124138169
Observaţii: N – normalizare; C – călire; r – revenire joasă;R – revenire înaltă.

Capitolul 2. Şuruburi de forţă cu alunecare 63

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI64
elasticitate mai mic decât cel al materialului şurubului, ceea ce are ca efectuniformizarea repartizării sarcinii pe spire, îmbunătăţirea comportării laoboseală şi ca urmare creşterea duratei de funcţionare. Alegerea materialuluipentru piuliţă, ca element al transmisiei şurub-piuliţă, se va face în aşa felîncât să se limiteze presiunea de contact dintre spirele piuliţei şi aleşurubului la valori reduse, evitându-se astfel uzura prematură. Se mai ţinecont şi de recomandările bazate pe experienţe, care indică utilizarea unorcupluri de materiale care au o comportare bună din punct de vedere alrezistenţei la uzură, ca de exemplu: oţel pe fontă; oţel pe bronz moale; oţelpe fontă antifricţiune. Nu este indicat să se utilizeze acelaşi material pentrupiuliţă şi pentru şurubul de forţă.
În tabelul 2.19 sunt date valori ale presiunilor admisibile în funcţiede materialele componente ale cuplei de frecare.
Alegerea presiunilor admisibile se va face în funcţie de frecvenţaacţionărilor. Pentru şuruburi acţionate foarte des, când este necesarămenţinerea îndelungată a preciziei se pot alege presiuni admisibile pa< 0,5MPa.
Tabelul 2.19Valori ale presiunilor admisibile şi a rezistenţelor admisibile la strivire
pentru cupla de frecare şurub-piuliţă din construcţia mecanismului cu şurub
Nr.crt.
Materialele cuplei de frecare
pa,(suprafeţemobile)
MPa
σastr ,(suprafeţeimobile)
MPa123456
Oţel călit - bronzOţel necălit - bronzOţel călit - fontă antifricţiuneOţel necălit - fontă antifricţiuneOţel necălit - fontă cenuşieOţel - oţel
12...138...107... 96.... 7
57...13
42...5542...5535...4535...4535...4565...100
Valori ale principalelor caracteristici mecanice pentru fontelerecomandate la construcţia şurubului şi a piuliţei din construcţiamecanismelor cu şurub sunt date în tabelul 2.20, iar în tabelul 2.21 suntcuprinse valorile rezistenţelor admisibile pentru aceleaşi materiale.
Pentru bronzurile şi alamele recomandate la construcţia piuliţelor,caracteristicile mecanice principale sunt date în tabelul 2.22.
Valori ale rezistenţelor admisibile pentru aceleaşi mărci de bronz şialame sunt cuprinse în tabelul 2.23.

Capitolul 2. Şuruburi de forţă cu alunecare 65
Caracteristicile mecanice ale mărcilor de fonte recomandate în construcţiacuplei şurub-piuliţă din mecanismele cu şurub Tabelul 2.20
STASMarca
materialului
Rezistenţala
tracţiuneRm,MPa
Limita decurgereRpo,2,MPa
Alungireala rupere
A,%,min
DuritateaBrinell
HBmax.
568-82
Fc 100Fc 150Fc 200Fc 250Fc 300
100...160110...250160...270210...320250...320
-----
-----
100...150140...190170...210180...240200...260
6071-75
Fgn 370-17Fgn 400-12Fgn 450-5Fgn 500-7
370400450500
230250320350
171257
140...180150...200160...220170...210
2.4.2. Materiale utilizate pentru alte elemente componente alemecanismului şurub - piuliţă.
Mecanismele cu şurub şi piuliţă au în construcţia lor, pe lângăelementele principale şurubul de forţă şi piuliţa şi alte elementecomponente: cupa, corpul, mecanismul de acţionare (în cazul cricurilor)traverse, coloane (în cazul preselor).
Alegerea materialului pentru fiecare din aceste componente se faceţinând seama în principal de: caracteristicile mecanice, prelucrarea încondiţii cât mai economice, fiabilitatea impusă piesei, preţ de cost.
Materialele utilizate frecvent pentru componentele cricurilor şi apreselor fac parte din categoria oţelurilor şi a fontelor. La alegerea uneicategorii sau alta se va decide în funcţie de procesul tehnologic de execuţieaplicat.
Dacă se va opta pentru execuţia prin turnare (cupă, corp, traverse,manivelă), procedeu care permite realizarea unor piese de complexitatemare, cu preţ de cost scăzut (cu condiţia ca numărul de bucăţi să fiesuficient de mare), se poate alege oţelul turnat sau fonta.
Se va alege oţelul turnat (OT 400, OT 450, OT 500, OT 600, STAS600-82), pentru cazul în care tehnologia de execuţie cea mai ieftină esteturnarea, iar proprietăţile mecanice asigurate de fontă sunt suficiente.
Oţelurilor turnate li se poate prevedea după turnare aplicarea unortratamente termice primare (normalizare sau recoacere pentru piese intenssolicitate şi detensionare în cazul celorlalte piese) (v. tabelul 2.17 şi 2.18).

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI66

Capitolul 2. Şuruburi de forţă cu alunecare 67

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI68

Capitolul 2. Şuruburi de forţă cu alunecare 69

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI70
Fonta este recomandată la execuţia unor piese din construcţiamecanismului şurub – piuliţă ca urmare a calităţilor sale: fluiditate mare înstare topită, amortizarea vibraţiilor, preţ de cost redus, comportarea bună lacompresiune. În tabelele 2.20 şi 2.21 se prezintă caracteristicile principalelormărci de fontă cenuşie.
În vederea alegerii mărcii de fontă corespunzătoare se poate utilizadiagrama prezentată în fig. 2.15, care prezintă corelaţia dintre rezistenţa la
tracţiune şi grosimeapereţilor piesei,procedându-se astfel: încazul unei piese turnate dinfontă, cu grosimeapereţilor de 7 – 8 mm, carenecesită o rezistenţă latracţiune de minim 300MPa, din punctulcorespunzător grosimiiperetelui piesei, de 7 – 8mm, se ridică o verticalăpână la intersecţia cuorizontala corespunzătoarerezistenţei la tracţiune de300 MPa, înscrisă peordonată; prima curbădeasupra acestui punct
arată marca fontei indicată a fi aleasă (Fc 250).În cazul alegerii unei construcţii sudate este foarte importantă
alegerea (pentru corp, mecanism de acţionare, traverse) a unor oţeluri cuproprietăţi de sudabilitate bune, în plus, faţă de considerentele enumerateanterior, spre exemplu: OL 32, OL 34, OL 37, OL 47 STAS 500/2-80.
Coloanele preselor, roata de clichet, clichetul şi alte elemente delegătură din construcţia mecanismului de acţionare cu clichet (vertical sauorizontal), datorită solicitărilor mai intense se vor executa din oţel.
Alegerea mărcii de oţel se face pe baza estimării caracterului şiintensităţii solicitării.
Solicitările se referă la rezistenţa în condiţiile de solicitare statică saudinamică, mărimea deformaţiei, comportarea în condiţii de lucru(temperatură, vibraţii, durabilitate etc.).
Procedeele tehnologice indicate pentru realizarea lor sunt: forjarea,turnarea sau prelucrarea prin aşchiere.
Fig. 2.15

Capitolul 2. Şuruburi de forţă cu alunecare 71
2.5. CALCULUL ŞI PROIECTAREA ŞURUBURILORDE FORŢĂ CU ALUNECARE
2.5.1. Calculul şi proiectarea şurubului principal.Calculul de dimensionare parcurge etapele date în succesiunea de
mai jos:1. Stabilirea naturii solicitărilor tijei.Pe baza schiţei constructive şi a modului de funcţionare se poate
stabili care sunt solicitările tijei şurubului în diferite secţiuni. Se reprezintăgrafic variaţia forţei axiale şi a momentului de torsiune pe lungimeaşurubului (fig. 1.2 ... 1.28 şi 1.30).
2. Alegerea profilului filetului.Recomandări privind alegerea profilului filetului sunt prezentate în
§. 2.2. Alegerea profilului filetului depinde de direcţia şi caracterul forţei, decondiţiile de exploatare (praf, mediu corosiv etc.) şi de randamentul impus.
În general, se optează între filetul trapezoidal (STAS 2114/1 – 75),filetul ferăstrău (STAS 2234/1 - 75) şi filetul pătrat.
În cazul în care se alege filetul ferăstrău, filetul se aşează astfel încâtsarcina de la şurub la piuliţă să fie transmisă cu ajutorul profilului înclinatfaţă de axa şurubului cu unghiul de 870, în caz contrar, randamentul semicşorează foarte mult.
3. Alegerea materialului şurubului şi piuliţei.Recomandări privind alegerea materialului şurubului şi piuliţei sunt
prezentate în § 2.4.La presele şi cricurile cu acţionare manuală viteza relativă dintre
flancul spirei şurubului şi cel al piuliţei este redusă. Din acest motiv nu seimpune durificarea superficială a flancurilor filetului şurubului. Se poateopta deci pentru oţelurile carbon (OL 50, OL 60). Pentru piuliţă se pot alegemateriale care să înlocuiască bronzurile (scumpe), de exemplu fontă cugrafit nodular (STAS 6071 – 75) şi fonte antifricţiune (STAS 6707).
4. Calculul diametrului filetului şurubului.Există două variante de calcul:a) Se calculează diametrul interior al filetului şurubului 1d , din
solicitarea de compresiune sau tracţiune:

72 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
)c(at
Fkd
4
1 (2.2)
în care:k - coeficient care ţine seama de solicitarea de torsiune la strângerea
şurubului. Pentru coeficientul k se recomandă, în funcţie de modul derezemare al şurubului şi de destinaţia acestuia, valorile cuprinse în limitele 5121 ,,k (tabelul 2.24).
Tabelul 2.24Tipul mecanismului k
Şurub pentru cricuri 1,25 ÷ 1,30Şurub pentru presă cu lagăr axial de alunecare 1,35 ÷ 1,50Şurub pentru presă cu lagăr axial de rostogolire 1,30 ÷1,35
)(cat - tensiunea admisibilă la compresiune; se calculează în funcţie
de limita de curgere a materialului şurubuluic
c)c(at c
, unde cc -
coeficientul de siguranţă faţă de curgere, cc = 3 ÷ 5.
În cazul utilizării oţelurilor carbon se poate accepta )c(at = 40 ÷ 60
MPa pentru diametrele 301 d mm, respectiv )c(at = 60 ÷ 80 MPa pentru
diametrele 1d > 30 mm (tabelul 2.18).b) Se determină diametrul mediu al filetului şurubului în funcţie de
cauza principală care provoacă ieşirea din uz a cuplei şurub – piuliţă.Considerând drept cauză principală de ieşire din uz uzura flancurilor
filetului, dimensionarea şurubului se va face pe baza presiunii de contact(strivire):
amh p
Fd
2 (2.3)
în care:F - forţa axială, în N;
p
Hh
1 - reprezintă coeficientul de înălţime a filetului ( 1H -
înălţimea utilă a filetului; p – pasul filetului); h = 0,5 la filetele
trapezoidale şi h = 0,75 la filetele ferăstrău;

Capitolul 2. Şuruburi de forţă cu alunecare 73
2d
mm - reprezintă coeficientul de înălţime a piuliţei (m –
înălţimea piuliţei); m = 1,2…2,5 pentru piuliţe întregi şi m = 2,5…3,5pentru piuliţe din două bucăţi. Valorile superioare se aleg pentru şuruburi cudiametre mici. [19, 25]
ap - tensiunea admisibilă la strivire, MPa (tabelul 2.19).
Valorile obţinute pentru 1d (relaţia 2.2) sau 2d (relaţia 2.3) serotunjesc la valoarea standardizată imediat superioară şi se identificădimensiunile filetului adoptat conform anexelor 2…5.
Observaţie.În cazul şuruburilor care au o porţiune de secţiune poligonală pentru
acţionarea lor (capăt pătrat sau hexagonal), de exemplu cele de la presele cupiuliţă fixă (fig. 4.15, 4.16 şi 4.17) se impune o verificare preliminară aacestor secţiuni. Numai după aceea se trece la dezvoltarea construcţiei.
Din fig. 1.3, 1.8, 1.9, 1.12 ... 1.16 şi 1.18 … 1.23 se constată căsolicitarea acestei secţiuni este de torsiune produsă de momentul mM :
atp
mt W
M , MPa (2.4)
sau: atp
tt W
Mk
1'
, MPa (2.5)
în care:
mM - momentul total necesar acţionării şurubului, Nmm;
k – coeficient care ţine seama de tipul lagărului axial: pentru lagărcu rulment k = 1,1; pentru lagăr de alunecare k = 2;
pW - modulul de rezistenţă polar al secţiunii, în mm³; pentru secţiune
pătrată pW = 0,208 2a [31], a – latura pătratului; pentru o secţiunehexagonală pW = 0,223 SA [14, 25], în care A este aria hexagonului, iar S
deschiderea cheii.
5. Alegerea numărului de începuturi.La cricuri se impune realizarea autofrânării, deci filetul se execută cu
un început. La presele manuale nu se pune condiţia autofrânării.Dimpotrivă, acţionarea lor fiind frecventă, se impune alegerea unui numărde începuturi n = 2 sau n = 3 pentru creşterea randamentului şi aproductivităţii.

74 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
6. Verificarea autofrânării.La cricuri se verifică autofrânarea cu relaţia:
'2 (2.6)în care:
22 d
parctg
- este unghiul de înclinare a elicei pe cilindrul de
diametru 2d ;
cos
arctg' este unghiul de frecare; - coeficient de frecare
pentru cuplul de materiale şi calitatea ungerii ( = 0,1…0,18); - unghiulde înclinare a flancului filetului (la filetul trapezoidal = 150; la filetulferăstrău = 30, iar la filetul pătrat = 00).
7. Calculul numărului de spire în contact.
Din expresia factorului
22 d
pz
d
mm se deduce numărul de
spire z:
p
dz m 2 (2.7)
Se impune ca: 116 z
8. Calculul înălţimii filetului piuliţei,pzm , mm (2.8)
9. Calculul lungimii filetului şurubului.Problema se pune diferit în funcţie de varianta constructivă.
a) Cric cu piuliţă rotitoare.Lungimea fL a filetului la cricul din fig. 4.5
pTmhL f 3 , mm (2.9)
unde:h – cursa maximă, în mm;m – înălţimea filetului piuliţei, în mm;T – gabaritul axial al rulmentului, în mm;p – pasul filetului, în mm.

Capitolul 2. Şuruburi de forţă cu alunecare 75
b) Cric telescopic.Lungimea minimă 1fL a filetului şurubului principal rezultă din
relaţia:
1221
11 3 pmpp
hpL f
(2.10)
unde:
1p , 2p - sunt paşii filetelor şurubului principal, respectiv secundar;h – cursa maximă;
2m - lungimea filetului interior al şurubului secundar dată în fig.2.19 (se determină cu o relaţie de tip 2.8).
Lungimea efectivă a filetului se poate lua mai mare decât 1fL . Acest
fapt este posibil deoarece se constată, în timpul proiectării, că în interiorulşurubului secundar rămâne un spaţiu neutilizat pe direcţie axială. Mărirealungimii filetate este şi utilă, deoarece permite aducerea cupei în poziţiainiţială sub sarcină, fără a se consuma prin aceasta o parte din cursa utilă.
c) Presă cu piuliţă fixă.pmhL f 3 , mm (2.11)
unde:h, m - au semnificaţiile anterioare, iar p este pasul aparent al
filetului.
d) Presă cu piuliţă rotitoare.La acest ansamblu există două posibilităţi:1. filet de lungime minimă necesară (relaţia 2.11);2. filet de lungime mare:
60...30 LL f , mm (2.12)
unde:L - este lungimea totală a şurubului în mm, iar hL f .
În cazul utilizării filetului lung se ajunge la un gabarit mai redus alpresei prin scurtarea sensibilă a piuliţei, deoarece pana nu e solidară cuşurubul ci cu un alt element, care este fix.
10. Proiectarea extremităţilor şurubului principal.La proiectarea extremităţilor, proiectantul trebuie să fie atent pentru
ca dimensiunile radiale ale unei extremităţi să se înscrie în cercuri cudiametre mai mici decât diametrul interior al filetului. În caz contrar şurubul

76 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
nu poate fi introdus în piuliţă. Din acest punct de vedere forma şurubului dinfig. 2.16 este greşită 323; dDdD pgs .
a) Cric cu piuliţă rotitoare.Stabilirea formei şi dimensiunilor extremităţilor
şurubului nu comportă probleme deosebite. Ele rezultăuşor urmărind construcţiile din fig. 4.4, 4.5 şi 4.6.
b) Cric telescopic.Există două variante :1) cupa se reazemă la partea superioară a
şurubului (fig. 2.27).2) cupa se reazemă pe un guler (fig. 2.17).
Diametrul exterior al gulerului se determină dincondiţia de rezistenţă la strivire cu cupa:
24cs
astrgs D
FD
, mm (2.13)
unde:F se ia în N, csD în mm, iar astr (aleasă pentru
suprafeţele imobile - tabelul 2.19) în MPa.Grosimea minimă a gulerului, gh se determină din condiţia de
rezistenţă la încovoiere, considerând acoperitor că sarcina acţionează lamarginea gulerului. Secţiunea periculoasă este A – A.
aics
csgsg D
DDFh
3, mm (2.14)
în care:
ai este tensiunea admisibilă laîncovoiere, în MPa.
Lungimea csl a extremităţiişurubului se ia mai mică decât lungimea
cil a alezajului cupei (la soluţia din fig.2.17) pentru a se evita suprapoziţionarea.
c) Presă cu piuliţă fixă.Extremitatea superioară pe care se
montează elementele de acţionare, sedimensionează în modul arătat la § 2.7.2.
Fig. 2.16
Fig. 2.17

Capitolul 2. Şuruburi de forţă cu alunecare 77
Dimensionarea extremităţii inferioare depinde de modul de rezemare(fig. 2.18).
În cazul rezemării în lagăr cu alunecare (fig. 2.18 a), se admiteraportul 3,0...2,0/ 211 pp DDk şi se calculează 2pD la presiune de
contact:
ap
pk
FD
21
21
4
, mm (2.15)
unde:
ap - este presiunea de contact admisibilă, în MPa.
Grosimea minimă ph a pivotului se determină din condiţia derezistenţă la încovoiere. Secţiunea critică este B – B:
ait
tpp D
DDFh
23
, mm (2.16)
În cazul rezemării şurubului pe un rulment axial (fig. 2.18 b) seprocedează astfel:
- se alege rulmentul astfel încât capacitatea lui statică 0C să fie:FC 0 (2.17)
iar din STAS rezultă dimensiunile rulmentului. Se alege 2pD astfel încât săfie mai mare decât diametrul md al cercului centrelor bilelor, dar mai mic
Fig. 2.18

78 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
decât rD . Grosimea prh a gulerului se determină din condiţia de rezistenţăla încovoiere. Secţiunea periculoasă este C – C:
aif
fmpr
d
ddFh
3, mm (2.18)
d) Presă cu piuliţă rotitoare.Proiectarea extremităţilor şurubului se face uşor, direct, urmărind
construcţiile din figurile 4.18, 4.19 şi 4.20.
2.5.2. Şurubul secundar.Se parcurg aceleaşi etape ca la dimensionarea şurubului principal.
De aceea în cele ce urmează se vor face doar anumite precizări numai acolounde apar elemente specifice proiectării şurubului secundar. În rest se vorparcurge etapele de la § 2.5.1.
1. Alegerea materialului şurubului secundar.Ţinând seama de forma acestuia (fig. 2.19) caracterizată prin
existenţa unor tronsoane de diametre diferite şi a unor goluri interioare, nueste economic să se execute dintr-un material laminat, ci dintr-unul turnat(de exemplu Fgn).
Fig. 2.19

Capitolul 2. Şuruburi de forţă cu alunecare 79
2. Calculul diametrului interior al filetului exterior.Se determină din solicitarea compusă (compresiune şi torsiune) a
corpului:
21
4d
acs D
Fkd
, mm (2.19)
unde:k = 1,3 este coeficientul care ia în considerare solicitarea de
torsiune; 64...DDd , mm
ac - tensiunea admisibilă la compresiune, în MPa. Se va ţineseama, la alegerea ei, de existenţa concentratorului de tensiuni care estefiletul.
Se va alege din STAS un filet cu diametrul interior superior celuicalculat şi se va avea în vedere condiţia:
52
1
dss
Ddg , mm (2.20)
Din STAS se iau toate celelalte elemente ale filetului (pas, diametreetc.).
3. Calculul lungimii filetului şurubului secundar.La filetele cu degajare, în lungimea filetului se consideră şi
degajarea.
221
22 3 pmpp
hpL f
, mm (2.21)
unde: m - este lungimea porţiunii filetate a piuliţei şurubului secundar (sedetermină cu o relaţie de tip 2.8).
4. Proiectarea extremităţilor şurubului secundar.Dacă asamblarea roţii de clinchet se face
pe o porţiune hexagonală (fig. 2.19 b - variantaI), atunci trebuie să fie îndeplinită condiţia:
6dS (2.22)
pentru ca roata de clichet să se poată monta.Poziţia porţiunii cu filet interior, precum
şi lungimile tronsoanelor de la partea superioarăa şurubului se vor adopta astfel încât să se eviterealizarea unei secţiuni periculoase B –B (în fig.2.20 soluţia nu este corectă, cele două degajărifiind în aceeaşi secţiune).Fig. 2.20

80 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
2.5.3. Verificarea şurubului.
1. Verificarea tijei la solicitarea compusă.Urmărind figurile 1.2 ... 1.9, 1.12, 1.16, 1.17, 1,21, 1,23, 1.26 …
1.28 şi 1.30 se stabilesc secţiunile solicitate atât la compresiune cât şi latorsiune. Tensiunea echivalentă se determină cu relaţia:
atcech 22 3 (2.23)
unde: tensiunea normală c , respectiv cea tangenţială t se calculeazăconform tabelului 2.25.
2. Verificarea secţiunii de calare a roţii de manevră la torsiune.
a) Presă cu piuliţă fixă.Secţiunea este solicitată de momentul de torsiune total (fig. 1.16):
ftm MMM 1 , N.mm (2.24)
unde:
1tM şi fM - sunt momentele de torsiune din tabelul 2.25. Tensiunea
de torsiune:
atp
mt W
M , MPa (2.25)
unde:
pW - se determină conform indicaţiilor date la relaţia (2.5).
b) Cric telescopic.Secţiunea este solicitată de un moment de torsiune egal cu:
txIItm MMM 1 , N.mm (2.26)
unde:
IItM 1 - este momentul de torsiune din tabelul 2.25, iar txM este
partea din momentul de înşurubare ItM 1 (corespunzător filetului interior)care revine lungimii xl (fig. 2.19).
21 m
lMM x
Ittx (2.27)
Rezultă:
atp
mt W
M , MPa (2.28)

Capitolul 2. Şuruburi de forţă cu alunecare 81

82 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 2. Şuruburi de forţă cu alunecare 83
unde pW se ia în funcţie de forma secţiunii. În cazul porţiunii hexagonale(fig. 2.19 b) se va considera o secţiune inelară cu diametrul exterior egal cudiametrul cercului înscris în hexagon.
3. Verificarea la strivire a porţiunii de calare a roţii de manevră.Această verificare este prezentată în cadrul mecanismului de
acţionare (§ 2.7.2).
4. Verificarea spirelor şurubului.Verificarea spirelor se face conform tabelului 2.26.
5. Verificarea şurubului la flambaj.a) Cric cu piuliţă rotitoare, presă cu piuliţă fixă, presă cu piuliţă
rotitoare.Verificarea la flambaj nu este necesară pentru valori ale
coeficientului de zvelteţe 60 [31, ceea ce conduce la condiţia115 dl f ( fl - lungimea de flambaj, tabelul 2.27).
Lungimi de flambaj Tabelul 2.27
Nr.crt.
Modul de rezemare acapetelor
Lungimea deflambaj
fl (mm)Observaţii
1Încastrat la un capăt,liber la celălalt fl = 2 l
l – lungimeaşurubului cuprinsăîntre cele douăreazeme (capete)
2 Articulat la ambele capete fl = l
3Încastrat la un capăt,articulat la celălalt fl =0,7 l
4 Încastrat la ambele capete fl = 0,5 l
Dacă 10060 se utilizează relaţia (2.29) [31] pentrudeterminarea forţei critice de flambaj:
bad
F f 4
21 , N (2.29)
unde: a şi b - au valorile din tabelul 2.28, iar coeficientul de zvelteţe sedetermină cu relaţia:
minf I
Al (2.30)

84 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
în care:
minI - este momentul de inerţie minim al unei secţiuni cuprinse înporţiunea care se flambează iar A este aria acestei secţiuni. Pentru o porţiunefiletată:
1
41 6040
64 d
d,,
dImin
(2.31)
Tabelul 2.28Nr.Crt. Materialul a b
1 OL 50 350 1,152 OLC 45 450 1,673 OLC 50 472 1,87
Dacă 100 atunci forţa critică de flambaj se determină cu relaţia
lui Euler:2
2
f
minf
l
IEF
(2.32)
Coeficientul de siguranţă va fi:F
Fc f (2.33)
b) Cric telescopic.Calculul se efectuează ca în cazul barelor de secţiune variabilă în
trepte. Pentru o construcţie de tipul celei din figura 4.8, cu notaţiile din fig.2.21, forţa critică de flambaj are expresia [19, 25]:
22
l
IEkF ff (2.34)
unde kf are valorile din tabelul 2.29.
Fig. 2.21 Fig. 2.22

Capitolul 2. Şuruburi de forţă cu alunecare 85
Pentru o construcţie de tipul celei din fig. 2.22 cu notaţiile din fig.2.22, forţa critică de flambaj se determină cu relaţia de forma (2.34) în carekf are valorile din tabelul 2.30.
Valori ale lui kf pentru cazul a două tronsoane Tabelul 2.29
l
l21
12
I
II
0 0,1 0,2 0,5 1 2 5 10 20 50 100
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
2,467
2,467
2,467
2,467
2,467
2,467
2,467
2,467
2,467
2,467
2,467
2,243
2,285
2,325
2,363
2,396
2,423
2,444
2,457
2,464
2,467
2,467
2,056
2,126
2,197
2,262
2,327
2,379
2,420
2,446
2,461
2,466
2,467
1,645
1,761
1,881
2,013
2,141
2,256
2,350
2,415
2,453
2,465
2,467
1,234
1,367
1,520
1,692
1,879
2,068
2,235
2,365
2,402
2,459
2,467
0,8225
0,9440
1,093
1,277
1,499
1,756
2,025
2,256
2,402
2,459
2,467
0,4111
0,4894
0,5919
0,7293
0,9174
1,178
1,531
1,950
2,106
2,446
2,467
0,2243
0,2714
0,3350
0,4237
0,5498
0,7462
1,052
1,530
2,106
2,424
2,467
0,1175
0,1436
0,1793
0,2302
0,3064
0,4268
0,6330
1,018
1,730
2,374
2,467
0,04837
0,05947
0,07486
0,09709
0,1309
0,1860
0,2848
0,4880
0,9991
2,189
2,467
0,02465
0,03010
0,03798
0,04944
0,06697
0,09580
0,1482
0,2588
0,5592
1,746
2,467
Tabelul 2.30
2
1
I
I Valorile lui kf în funcţie de raportull
l2
0,2 0,4 0,6 0,80,010,10,20,40,60,8
0,151,472,8050,96,988,55
0,272,404,226,688,199,18
0,604,506,698,519,249,63
2,268,599,339,679,789,84
2.6. CALCULUL ŞI PROIECTAREA PIULIŢEI.
2.6.1. Dimensionarea piuliţelor fixe.Cu notaţiile din fig. 2.23 se calculează diametrul eD al corpului
piuliţei la solicitarea compusă (tracţiune şi torsiune):

86 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
24D
FkD
ate
, mm (2.35)
unde, la alegerea tensiunii admisibile la tracţiune at , MPa se va ţine seamade prezenţa concentratorului de tensiune (filetul).
Se va respecta condiţia:
52
'
DDg e
p , mm (2.36)
Diametrul gulerului se ia [1, 3]: eg D,...,D 5131 (2.37)
Observaţie: Dacă la presa cu piuliţă fixă se utilizează şuruburi desiguranţă pentru fixarea piuliţei (fig. 2.24) atunci se procedează astfel:
- se admite o grosime g a peretelui între şurubul de fixare şi piuliţă5g mm;
- se alege şurubul de fixare;- se construieşte gulerul astfel încât să se asigure rezemarea capului
şurubului.Grosimea gulerului se ia [1]:
mhg 25.0...2,0 (2.38)
Lungimea piuliţei, m, se determină cu relaţia (2.8).
2.6.2. Dimensionarea piuliţelor rotitoare.
2.6.2.1. Cric cu piuliţă rotitoare.Forma piuliţei, construită pe criterii funcţionale este prezentată în
figura 2.25.Pentru determinarea diametrului exterior eD se procedează astfel:
Fig. 2.23 Fig. 2.24

Capitolul 2. Şuruburi de forţă cu alunecare 87
- se alege rulmentul astfel încâtcapacitatea statică 0C a lui să fie
FC 0 , iar diametrul alezajului
rulmentului fd să fie mai mare decâtdiametrul exterior al şurubului (caretrece prin rulment);
- se ia din STAS diametrulexterior al rulmentului, rD ;
- se determină 6...4 re DD ,
mm.
2.6.2.2. Presă cu piuliţărotitoare.
Forma piuliţei, în concordanţăcu rolul funcţional al acesteia, rezultă
din figura 2.26.
Fig. 2.25
Fig. 2.26

88 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Piuliţele se dimensionează în următoarele etape:
a) Filetul pentru piuliţa de fixare a roţii de manevră.Se calculează la solicitarea compusă (tracţiune şi torsiune):
21
4D
Fkd
at
, mm (2.39)
unde, la alegerea tensiunii admisibile at , MPa se va ţine seama că însecţiune apar doi concentratori (cele două filete). Se standardizeazădiametrul obţinut şi se determină toate dimensiunile filetului.
b) Diametrul porţiunii de calare cD al roţii. 14...10 dDc , mm (2.40)
Se alege pana paralelă în funcţie de diametrul cD .
Se va ţine seama ca grosimea peretelui 52 g mm.
c) Diametrul exterior eD al corpului piuliţei.Iniţial se determină diametrul 0D al porţiunii degajate. Dacă pana
care împiedică rotirea şurubului este montată pe şurub, atunci: NjtdD 20 , mm (2.41)
unde:d - este diametrul exterior al şurubului;t – înălţimea penei în interiorul şurubului;
Nj 2 mm distanţa dintre pană şi piuliţă.Dacă pana nu se montează pe şurub, atunci 0D se poate lua mult mai
mic, în concordanţă cu soluţia constructivă. Diametrul exterior se calculeazăla solicitare compusă (tracţiune şi torsiune):
20
4D
FkD
ate
, mm (2.42)
dar se va îndeplini condiţia:
52
03
DDg e , mm (2.43)
d) Diametrul porţiunii de montare a rulmentului.Se va alege un rulment axial care să îndeplinească următoarele
condiţii:- capacitatea lui statică FC 0 ;

Capitolul 2. Şuruburi de forţă cu alunecare 89
- diametrul alezajului ef Dd .
Din STAS mai rezultă rD şi md .
e) Diametrul gulerului piuliţei, gD .
Se ia:
rgm DDd (2.44)
f) Grosimea gulerului, gh :
361 g,hg (2.45)
g) Lungimea, dl a porţiunii degajate.Dacă pana care împiedică rotirea şurubului este montată pe şurub,
atunci dl se corelează cu cursa acestuia.Dacă pana este montată în capacul de ghidare a şurubului atunci
lungimea dl va depinde de lungimea filetului şurubului. Pentru filet lungrezultă o lungime minimă a lui dl .
h) Lungimea m a porţiunii filetate.Se determină cu relaţia (2.8).
2.6.3. Verificarea piuliţei.Calculul de verificare a corpului piuliţei se poate urmări în tabelul
2.31.Pentru secţiunile supuse la solicitări compuse, tensiunea echivalentă
are expresia:22 3 ttech , MPa (2.46)
în care t este tensiunea de tracţiune, iar t – cea de torsiune.
Verificarea spirelor se face conform observaţiilor de la tabelul 2.26.
2.7. CALCULUL ORGANELOR AUXILIARE ALEDISPOZITIVELOR CU ŞURUBURI DE FORŢĂ CUALUNECARE
2.7.1. Calculul cupei.Forma şi dimensiunile cupei se stabilesc constructiv, în funcţie de
dimensiunile capului şurubului de forţă. Calculul cupei cuprinde verificareala solicitările principale, care depind de tipul cricului şi soluţia constructivăadoptată.

90 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 2. Şuruburi de forţă cu alunecare 91

92 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
2.7.1.1. Cricul simplu şi cricul telescopic.
1. Stabilirea dimensiunilor.Diametrul Dcs al suprafeţei de reazem dintre cupă şi capul şurubului,
în cazul variantei cu lagăr axial de alunecare (fig. 2.27), se determină dincondiţia de rezistenţă la presiunea de contact:
aDcs p
FD
4
(2.47)
unde:F - este sarcina de ridicat, în N;
9375,0...96,0D , reprezintă factorul dimensional al suprafeţei desprijin, considerând csDD 25,0...2,00 , mm;
4025...pa MPa, presiunea admisibilă de contact, pentru cuplul demateriale oţel/oţel şi oţel/fontă.
Celelalte dimensiuni se adoptă constructiv în funcţie de diametrulexterior d al filetului şurubului pe care se montează cupa:
;d,...,dc 52422 ;d,...,hc 6141(2.48)
10821 ...dd cc , mm; 10 ccs hh , mm.
În scopul micşorării frecării, suprafeţele în contact se ung sau seutilizează soluţia cu rulment axial prezentată în figura 2.28. Rulmentul axialse alege în funcţie de diametrul Dcs al capului şurubului pe care se montează
Fig. 2.27 Fig. 2.28

Capitolul 2. Şuruburi de forţă cu alunecare 93
şi trebuie să îndeplinească condiţia FC 0 , unde C0 reprezintă capacitateastatică de încărcare a rulmentului (dată în cataloagele de rulmenţi).
2. Calculul momentului de frecare dintre şurub şi cupă.În cazul variantei cu lagăr axial de alunecare, se utilizează relaţia:
20
2
30
3
3
1
DD
DDFM
cs
csf
, Nmm (2.49)
unde:F - se înlocuieşte în N, Dcs şi D0 în mm;
18,0...1,0 , în funcţie de cuplul de materiale şi calitatea ungerii.La varianta cu rulment axial, relaţia de calcul a momentului este:
ff dFM 02
1 , Nmm (2.50)
în care:F - sarcina de ridicat, N;df - diametrul fusului, mm;
01,0...008,00 .
3. Verificarea la presiunea de contact dintre capul şurubului şicupă.
Verificarea se face în cazul variantei cu lagăr axial de alunecare:
acs
pDD
Fp
20
2
4
, MPa (2.51)
unde:F - se ia în N, Dcs şi D0 în mm;pa = 25…40 MPa.
4. Verificarea capului şurubului la solicitarea compusă.Tensiunea echivalentă în secţiunea slăbită I – I (fig. 2.27, respectiv
2.28) se determină cu relaţia:
atcech 22 3 , MPa (2.52)
unde:2
4
d
Fc
, MPa, tensiunea de compresiune; (2.53)
3
16
d
M mt
, MPa, tensiunea de torsiune; (2.54)
în care:

94 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
F - se înlocuieşte în N, Mm în Nmm şi d în mm; 8...6 csDd , mm;
ftm MMM 1 - în cazul cricului simplu, în Nmm;
IItItm MMM 11 - în cazul cricului telescopic, în Nmm;
2.7.1.2. Cricul cu piuliţă rotitoare şi cricul telescopic cu dublăacţiune.
1. Stabilirea dimensiunilor cupeiLa cricul cu piuliţă rotitoare se adoptă soluţia constructivă prezentată
în figura 2.29, unde 1dDcs (d1 este diametrul interior al filetului şurubuluipe care se montează cupa). Restul dimensiunilor se determină cu ajutorulrelaţiilor (2.48).
În cazul cricului telescopic cu dublă acţiune există două varianteposibile:
a) cupa se reazemă pe partea superioară a şurubului (fig. 2.29 a) şi înacest caz Dcs se determină constructiv;
b) cupa se reazemă pe un guler (fig. 2.17) ale cărui dimensiuni sedetermină cu ajutorul relaţiilor (2.13) şi (2.14).
2. Verificarea cupei.Dacă cupa este rezemată pe suprafaţa superioară a şurubului de forţă
(cric cu piuliţă rotitoare şi cric telescopic cu dublă acţiune) se verificăstrivirea dintre cupă şi şurub:
Fig. 2.29

Capitolul 2. Şuruburi de forţă cu alunecare 95
astrcs
strD
F
2
4, MPa (2.55)
iar în cazul în care cupa se sprijină pe guler (cric telescopic cu dublăacţiune) se fac următoarele verificări (fig. 2.17):
- la strivire:
astrcsgs
strDD
F
22
4, MPa (2.56)
- la încovoiere:
aigcs
csgsi
hD
DDF
2
3, MPa (2.57)
în care F se ia în N, Dgs, Dcs şi hg în mm;
astr - presiunea admisibilă de contact pentru suprafeţele imobile, înMPa;
ai - tensiunea admisibilă la încovoiere, în MPa.
3. Alegerea şi verificarea dimensiunilor ştiftului care solidarizeazăcupa de şurubul principal.
Se recomandă alegerea unui ştift conic conform STAS 1599-80,având (fig. 2.29):
csD,...,d 250150 , mm.
Pentru verificare se utilizează relaţiile:
afcs
tf
dD
M
2
4, MPa; (2.58)
1222
14
ascsc
ts
Ddd
M
, MPa; (2.59)
2226
ascs
ts
Dd
M
, MPa. (2.60)
unde:
f - tensiunea de forfecare din ştift, în MPa;
1s - tensiunea de strivire între ştift şi cupă, în MPa;
2s - tensiunea de strivire între ştift şi şurub, în MPa;
15,0 tt MM - pentru cricul cu piuliţă rotitoare, în Nmm;
1tt MM - pentru cricul telescopic cu dublă acţiune, în Nmm;
1tM - momentul de înşurubare care solicită şurubul principal, în Nmm;

96 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
203020 ,paf R,..., - tensiunea admisibilă la forfecare, în MPa;
2080 ,pas R, tensiunea admisibilă la strivire, în MPa;
20,pR - limita de curgere a materialului ştiftului, în MPa.
4. Verificarea capului şurubului la solicitarea compusă.Verificarea se face în secţiunea I – I cu ajutorul relaţiei (2.52), în
care:
cscs
c
DdD
F
4
2 , MPa; (2.61)
320 3
1
cscs
tt Dd
D,
M
, MPa . (2.62)
unde:F se introduce în N, Mt1 în Nmm şi d în mm;
c – tensiunea de compresiune din secţiunea I – I, în MPa;
t - tensiunea de torsiune din secţiunea I – I, în MPa.
2.7.2. Calculul mecanismelor de acţionare.
Mecanismele de acţionare utilizate la cricuri pot fi cu clichetorizontal (fig. 2.30), sau cu clichet vertical (fig. 2.31).
Fig. 2.30

Capitolul 2. Şuruburi de forţă cu alunecare 97
Pentru acţionarea preselor cu piuliţă fixă se utilizează manivelamontată pe capul pătrat al şurubului de forţă, iar în cazul preselor cu piuliţărotitoare se folosesc roţi de mână standardizate montate pe piuliţă cu panăparalelă şi fixate cu ajutorul unei şaibe şi piuliţe crenelate.
Principalele dimensiuni ale mecanismelor de acţionare cu clichet sedetermină cu ajutorul calculului de rezistenţă.
2.7.2.1. Calculul manivelei.
1. Lungimea manivelei.Lungimea manivelei se determină în funcţie de momentul de
torsiune total care trebuie să fie realizat la acţionarea cricului sau a presei:
mi
mc FnK
ML , mm; (2.63)
0lLL c , mm, (2.64)
unde: Lc - este lungimea de calcul a manivelei, în mm;L – lungimea efectivă a manivelei, în mm;l0 – lungimea necesară prinderii manivelei, în mm şi anume:
500 l mm, pentru un muncitor;
1000 l mm, pentru doi muncitori;
Fig. 2.31

98 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
ftm MMM 1 , la cricul simplu, cricul cu piuliţă rotitoare şi laprese, în Nmm;
IItItm MMM 11 , la cricul cu dublă acţiune, în Nmm; (conform
tabelului 2.25);ni – numărul de muncitori care acţionează cricul;K – coeficient de nesimultaneitate, care are valorile:
8,0K , pentru 2in ;
1K , pentru 1in ;
350...150mF N, forţa cu care acţionează un muncitor.
2. Determinarea diametrului manivelei şi a prelungitoruluiDin solicitarea de încovoiere rezultă diametrul d5 (secţiunea A – A;
fig. 2.30 şi 2.31):- la mecanismul cu clichet orizontal:
35
32
ai
mcmi LLFnKd
, mm (2.65)
- la mecanismul cu clichet vertical:
35
32
ai
mcm lLLFnKd
, mm (2.66)
unde: 01250 lL...,L cm , mm;
l = 50…120 mm, în cazul în care se foloseşte prelungitor;ai = 100…120 MPa, pentru oţeluri carbon obişnuite şi oţeluri
carbon de calitate.Diametrul D se determină constructiv:- la mecanismul cu clichet orizontal:
55141 d,...,D , mm; (2.67)
- la mecanismul cu clichet vertical: 54121 d,...,D , mm. (2.68)
Pentru prelungitor se alege ţeavă standardizată, cu D şi d5 cât maiapropiate de valorile calculate.
3. Verificarea maniveleiVerificarea mecanismului de acţionare cu clichet orizontal se
verifică la încovoiere în secţiunile A – A şi C – C, cu relaţiile:- Secţiunea A – A:

Capitolul 2. Şuruburi de forţă cu alunecare 99
ai
mcmii
dDD
lLLFnK
45
41
32, MPa (2.69)
- Secţiunea C – C:
aib
cmii
db
lLFnK
12
1
12
3, MPa (2.70)
unde: d,...,b 80601 , în mm;
d – diametrul exterior al filetului şurubului pe care se monteazămecanismul de acţionare, în mm;
db – diametrul bolţului, se determină la paragraful 2.7.2.4, în mm; 60501 ,..., ; = 5…15 mm (se alege în funcţie de sarcină);
l1 – se determină în paragraful 2.7.2.3, în mm.În cazul mecanismului de acţionare cu clichet vertical prelungitorul
se verifică la încovoiere în secţiunea B – B (fig. 2.31), iar cordonul desudură se verifică la forfecare:
- încovoiere, secţiunea B – B:
aimmi
idD
D
LLFnK
45
41
32, MPa (2.71)
- forfecarea cordonului de sudură:
afs
mcmifs
laalla
l,mlLLFnK
6
502
, MPa (2.72)
unde: m - se măsoară pe desen, în mm;a = 3…6 mm, calibrul cordonului de sudură;
9114065,065,0 atafs MPa;
at - tensiunea admisibilă la tracţiune a materialului de bază, MPa.
2.7.2.2. Calculul roţii de clichet.
1. Stabilirea dimensiunilor.Dimensiunile roţii de clichet (fig. 2.32) se pot determina cu relaţiile:
d,a 70 , mm, pentru conturul pătrat;d,a 50 , mm, pentru conturul hexagonal;
cL,z 10 , 8min z dinţi;

100 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
d,Di 41 , mm;
z,
DD i
m 2501
, mm;
z
Dt m , mm;
t,b 50 , mm;b,h 50 , mm;
hDD ie 2 , mm.
unde:d - este diametrul exterior al filetului şurubului pe care se montează
roata de clichet, în mm;z – numărul de dinţi al roţii de clichet.
2. Verificarea roţii de clichet.Dinţii roţii de clichet se verifică la încovoiere, forfecare şi strivire.
Tensiunea de încovoiere se determină cu relaţia:
airc
ib
hF
2
3, MPa (2.73)
unde:
i - este tensiunea efectivă de încovoiere de la baza dintelui, înMPa;
m
mrc D
MF
2 , N - sarcina care acţionează pe dintele roţii de clichet;
10...5 mm, lăţimea roţii de clichet;120...100ai , MPa - pentru oţeluri carbon obişnuite şi de calitate.
Verificarea dinţilor roţii de clichet la forfecare se face cu relaţia:
afrc
f b
F
, MPa (2.74)
unde:
f - este tensiunea efectivă de forfecare la baza dintelui, în MPa,
95...60af MPa.
Verificarea la strivire a suprafeţei de contact dintre dintele roţii declichet şi clichet se face cu relaţia:
Fig. 2.32

Capitolul 2. Şuruburi de forţă cu alunecare 101
11 asrc
s hb
F , MPa (2.75)
unde:Frc - se ia în N, b şi h în mm;
100...801 as MPa.
Suprafaţa de contact dintre roata de clichet şi şurubul pe care semontează aceasta este solicitată la strivire (fig. 2.33 şi 2.34). Tensiunea destrivire pe suprafaţă se determină cu relaţia:
221
212
asm
san
M
, MPa (2.76)
unde: Mm - se ia în Nmm, a şi în mm;802 as MPa;
n1 = 4, pentru locaş pătrat;n1 = 6, pentru locaş hexagonal.Relaţia (2.76) se foloseşte şi în cazul preselor la verificarea
suprafeţei de contact dintre capul pătrat al şurubului de forţă şi manivelă,respectiv între suprafaţa de calare a piuliţei şi roata de mână.
În cazul preselor cu piuliţă rotitoare, la care roata de mână semontează pe piuliţă cu pană paralelă, aceasta se alege din STAS 1004-81 înfuncţie de diametrul piuliţei dp, pe care se montează roata. Se pot utiliza şipenele paralele subţiri STAS 9501-81.
Pana se verifică la presiune de contact şi forfecare, cu relaţiile:- presiune de contact:
app
m plhd
Mp
4, MPa (2.77)
Fig. 2.33 Fig. 2.34

102 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
- forfecare:
afpp
mf lbd
M
2, MPa (2.78)
unde:Mm - se ia în Nmm, dp, h, lp şi b în mm;dp – diametrul piuliţei pe care se montează roata de mână;b, h, lp – lăţimea, înălţimea şi lungimea penei paralele.
2.7.2.3. Calculul clichetului.1. Dimensiunile clichetului.Dimensiunile clichetului orizontal prezentat în fig. 2.35, se
determină în funcţie de dimensiunile roţii de clichet:
mD...,l 1801 ;12 l
Darcsin m ;
tgD
DD
m
ie 180
; 053... ; 2 .
Desenul începe cu construcţia clichetului şi continuă cu dinţii roţiide clichet.
Clichetul vertical rezultă constructiv în funcţie de dimensiunilemanivelei (fig. 2.36).
2. Verificarea clichetului.a) Clichetul orizontal:
arcrc
ech g
F
g
xF
2
6, MPa (2.79)
Fig. 2.35 Fig. 2.36

Capitolul 2. Şuruburi de forţă cu alunecare 103
unde:
ech - este tensiunea echivalentă (încovoiere şi compresiune) dinclichet, în MPa;
g, x, l1, l2 – se măsoară pe desen, în mm;120100...a MPa.
b) Clichetul vertical:
airc
ihc
lF
21
16, MPa (2.80)
unde:
i - este tensiunea efectivă de încovoiere în secţiunea A – A a
clichetului vertical, în MPa;c = h;h – înălţimea dintelui roţii de clichet, în mm;
2
1
l
lFF rcb , în N.
2.7.2.4. Calculul bolţului.1. Calculul bolţului clichetului orizontal.Diametrul bolţului se determină din solicitarea de încovoiere (fig.
2.37) şi se verifică la forfecare şi presiune de contact:
312
8
ai
rc
b
Fd
, mm; (2.81)
afb
rcf
d
F
2
2, MPa; (2.82)
ab
rc pd
Fp
, MPa. (2.83)
unde: Frc - se ia în N, , 1 , d, b, db în mm, aiîn MPa.
2. Calculul bolţului clichetului vertical (fig. 2.38).Se dimensionează pe baza solicitării de încovoiere şi se verifică la
forfecare şi strivire cu relaţiile:
316
ai
bb
hFd
, mm; (2.84)
unde:
Fig. 2.37

104 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Fb - se ia în N, db şi h în mm, ai în MPa.
afb
bf
d
F
2
4, MPa (2.85)
asb
bs hd
F , MPa (2.86)
Pentru bolţuri din oţel carbon sepoate lua:
120100...ai MPa;
95...80af MPa;
60as MPa.
2.7.2.5. Calculul arcului cilindric elicoidal de compresiune.Calculul arcului elicoidal cilindric de compresiune (fig. 2.39), care
menţine clichetul orizontal în contact cu dintele roţii de clichet se faceurmărind succesiunea şi cu relaţiile de calcul din tabelul 2.32.
Fig. 2.38
Fig. 2.39

Capitolul 2. Şuruburi de forţă cu alunecare 105
Tabelul 2.32Nr.crt.
Elementul de calcul Simbol Relaţii de calcul. Recomandări
1 Indicele arcului i
d
Di m Se alege i = 8…10
2 Coeficientul deformă
K K = 1,20 – pentru i = 8;K = 1,17 – pentru i = 9;K = 1,16 – pentru i = 10.
3 Diametrul spirei d Se adoptă d = 0,8…1,5 mm(d =0,8; 0,9; 1; 1,1; 1,2; 1,3; 1,4;1,5)
4 Diametrul deînfăşurare
Dm diDm , mm
5 Forţa de montaj Fa1 5...5,21 aF , N
6 Numărul de spireactive
n Se adoptă n = 4…8
7 Numărul total despire
nt rt nnn , unde 5,1rn
(numărul spirelor de reazem)8 Săgeata de montaj f1
ndG
DFf ma
4
31
18 , mm; unde
4105,8 G MPa – pentru oţel.9 Săgeata maximă fn sffn 1 ,
unde s – cursa de lucru a arcului(se măsoară pe desen, în mm)
10 Sarcina maximă deexploatare(nominală)
Fan
11 f
fFF n
aan , N
11 Tensiunea efectivăde torsiune
tat
mant
d
DFK
3
8, MPa
unde at = 650 MPa pentru51VCr11A
12 Rigiditatea arcului Ka
3
4
8 ma
Dn
dGK , N/mm
13 Lungimea arculuiblocat (spiră pespiră)
Hb dnH tb , mm

106 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 2.32 (continuare)Nr.crt.
Elementul de calcul Simbol Relaţii de calcul. Recomandări
14 Pasul arculuinesolicitat
t
n
fdt n , mm, unde
d,10 (jocul dintre spire)15 Lungimea arcului
nesolicitatH0 dtnHH b 0 , mm
16 Sarcina limită (arcblocat)
Fab
n
banab f
fFF , N;
nff nb , mm.
17 Diametrul exterior D dDD m , mm.
18 Diametrul interior Di dDD mi , mm.
19 Unghiul de înclinareal spirelor
0
mD
tarctg
0 , [ o]
20 Lungimeasemifabricatuluisârmei
ls
0cos
nDl tms , mm
2.7.3. Construcţia şi calculul corpului.
2.7.3.1. Corpul de cric.1. Corp turnat.Această variantă este mai
des întâlnită la cricurile telescopicecu dublă acţiune. Recomandăriconstructive:
a = 6…10 , mm; a,...,b 5121 ; 50…100;
10...45 eDD , mm;
gDaDD 256 ;
602011 ...pnH , mm;unde:
n1 - este numărul de rotaţiirelative între şurub şi piuliţă necesare pentru realizarea cursei maxime;
Fig. 2.40

Capitolul 2. Şuruburi de forţă cu alunecare 107
p – pasul filetului (de la şurubul principal la cricul cu piuliţărotitoare; de la şurubul secundar la cricul telescopic cu dublă acţiune);
5...21 ghmHH , mm;
tgHDD 157 2 .
Din condiţia de rezistenţă la strivire a materialului suprafeţei pe carese reazemă talpa cricului se determină D8 cu formula:
278
4D
FD
as
, mm (2.87)
unde: 3...2as MPa - pentru beton;
2...2,1as MPa - pentru lemn;
5,0...1,0as MPa - pentru pământ,cu condiţia:
mmDD
mm 502
20 78
.
Verificarea se face la compresiune în secţiunea A – A cu relaţia:
accDD
F
25
26
4(2.88)
unde: 100...80ac MPa.
2. Corp sudat.Varianta sudată se foloseşte atât la cricul telescopic cu dublă acţiune
cât şi la cel cu piuliţă rotitoare pentru care este dată o soluţie în fig. 2.41.Recomandări constructive:Dr este diametrul exterior al şaibei de carcasă a rulmentului axial;De – diametrul exterior al piuliţei;
6...16 fdD , mm;
unde:df - este diametrul interior al şaibei de fus a rulmentului axial;D5, D6, D7 se aleg corespunzător dimensiunilor de ţevi din STAS
404/2-80, 530/1-80, 530/2-80, 7657-80, 8726-80; 421 ...l , mm;
l2 – se alege corespunzător tipului rulmentului axial din STAS 6603-75;
10...5cl , mm;

108 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
70...40 clTl , mm,
unde:T - este înălţimea rulmentului axial; 15...8b , mm;
10...678 DD , mm,
cu condiţia:
22
68 DD
, mm;
50...3079 DD , mm; 809 D , mm;
9104
DF
Das
unde as are valorile date la § 2.7.3.1 pct. 1 şi
Fig. 2.41

Capitolul 2. Şuruburi de forţă cu alunecare 109
mmDD
mm 502
20 910
;
slhh ;
unde:h este cursa maximă a şurubului;ls – gabaritul elementului de blocare a rotaţiei şurubului, măsurat pe
direcţia axei cricului; 15...61 blhH c mm;
cllHH 1 .
Verificarea se face la:- compresiune în secţiunea B – B cu relaţia:
accDDbDD
F
67126
27 2
4(2.89)
- forfecare în secţiunea periculoasă C – C:
aff lbD
F
17(2.90)
2.7.3.2. Corpul de presă.
1. Corpul turnat.Recomandări constructive pentru varianta din figura 2.42:
5...25 rDD , mm;
unde:Dr - este diametrul exterior al şaibei de carcasă a rulmentului axial.
Dacă se alege soluţia fără rulment, atunci se ia gr DD ;
D6 - se alege conform STAS 3336-81 corespunzător diametrelorşuruburilor (M8 sau M10) de fixare a flanşei;
15...10657 DDD , mm;
20...10678 DDD , mm;
5...229 pDD , mm,
unde:
2pD - este diametrul maxim al capului şurubului ce se monteazăprin acest alezaj;
10D - se alege conform STAS 3336-81 corespunzător diametrelorşuruburilor de fundaţie (M10, M12, M14, M16, M20).

110 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Locaşurile şi suprafeţele de reazem pentru organele de asamblarefiletate se vor alege conform STAS 11574-83.
30...121 a , mm;
12 8030 a,...,a ;
82 Db ;
21 8040 b,...,b ;
25221 11 a...,c , mm;
Fig. 2.42

Capitolul 2. Şuruburi de forţă cu alunecare 111
12 cc ;
4...21 l , mm; 10...32 l , mm;
81 3...2 DL - valorile mai mici se vor alege în cazul în care cursa
maximă este mai mică;12 LL ;
70...4011 cH , mm;
12...72 ghTH , mm,
unde:T - este înălţimea rulmentului axial
( 0T la varianta fără rulment axial);hg – înălţimea gulerului piuliţei;
eDHH 0,1...7,023 ,
unde:De - este diametrul de centrare a
piuliţei în corp.H se determină în funcţie de H1, H3,
cursa maximă, grosimea plăcii cu canale T,lungimea flanşei etc.
o45...20 - în loc de zonarectilinie înclinată poate fi aleasă o zonăcurbă.
Calculul simplificat de verificare seface în secţiunea A – A (fig. 2.43) la
tracţiune excentrică. Tensiunea echivalentă maximă în punctul 1 este:titech 111 (2.91)
A
Ft 1 (2.92)
1
121
12
y
I
ylL
F
zi
(2.93)
unde: 4530...a MPa - pentru fontă obişnuită, 12060...a MPa - pentru oţel turnat;
A - este aria secţiunii;Iz – momentul de inerţie în raport cu axa Gz ce trece prin centrul de
greutate G al secţiunii.
Fig. 2.43

112 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
2. Corp asamblat (Varianta cu coloane).Elementele constructive pentru varianta dată în figura 2.44 sunt
următoarele:
gDD 4 43 DD La alegerea lui D4 se va ţine cont de soluţia de fixare a piuliţei în
traversa fixă (prin presare sau cu şuruburi).Diametrul interior al porţiunii filetate a coloanei se determină cu
relaţia:
Fig. 2.44

Capitolul 2. Şuruburi de forţă cu alunecare 113
at
cFd
4
1 (2.94)
unde:
2
FFc - este forţa de întindere din coloană ( 25,1...15,1 );
at - tensiunea admisibilă la tracţiune în tija filetului (vezi § 2.4)
d – se alege din standarde corespunzător unui diametru interior afiletului mai mare sau egal cu d1;
6...13 dd , mm;
12...634 dd , mm;
254 d , mm;dd ; 5...21 l , mm;
l2 se alege cu 2…5 mm mai mult decât lungimea găurii filetate dinpiuliţă;
33 dl ;
l4 se alege conform STAS 9025-81; 4...01 ghmH , mm;
4...232 lH , mm;
10...543 lH , mm;
34 HH ;
a = 20…30, mm; 6150 a...,b , mm;
15...8c , mm;
c,...,e 8060 ;
eD...L 851 ;
12 LL .Forma şi dimensiunile găurilor de fixare a presei se vor alege
conform indicaţiilor din STAS 3336-81 şi STAS 11574-83 corespunzătordiametrelor şuruburilor de fundaţie (M10, M12, M14, M16 sau M20).
Verificarea traversei fixe se face la încovoiere în secţiunea A – A curelaţia:
aie
ii
HDD
lF
W
M
213
3(2.95)

CAPITOLUL 3
ŞURUBURI DE FORŢĂ CU ROSTOGOLIRE
3.1. CONSIDERAŢII GENERALE.
La transmisiile cu şuruburi de mişcare la care se impun cerinţe mariprivind menţinerea preciziei cinematice în timp, randament ridicat, siguranţăîn funcţionare etc., utilizarea variantei clasice, cu mişcare de alunecare întrespire, devine nesatisfăcătoare.
În scopul micşorării frecării dintre spirele piuliţei şi ale şurubului(deci a măririi randamentului) se utilizează şuruburile cu bile (fig. 3.1). În
acest caz, între piuliţă şişurub se interpun bile, încanale de formă elicoidală,executate atât în şurub câtşi în piuliţă. Bilele sedeplasează în piuliţă pe otraiectorie închisă. Ieşinddin filet, ele se întorc înpoziţia iniţială prin canalulde întoarcere (fig. 3.1 a). Înmod convenţional,circuitul închis al bilelor seîmparte într-o zonă activă(zona de lucru a filetului)şi una pasivă (canalul deîntoarcere). Zona activă are1 – 2,5 spire. În cazul unuinumăr mai mare de spirede lucru, randamentul semicşorează datorităcreşterii frecărilor dintrebile.
Fig. 3.1

Capitolul 3. Şuruburi de forţă cu rostogolire 115
În cazul în care nu se admit jocuri axiale se folosesc sisteme custrângere preliminară. În acest caz, piuliţele se execută jumelate şi se strângcu ajutorul arcurilor (fig. 3.1 b).
În mod obişnuit şuruburile cu bile se execută cu un singur început,cu pas minim posibil, deoarece unghiul elicei şurubului are o influenţă micăasupra randamentului acestuia.
Aceste şuruburi se utilizează la automobile (sistemul de direcţie), lamaşini-unelte (şurubul conducător), în linii automate etc.
Utilizarea pe scară largă a transmisiilor şurub-piuliţă cu bile estelimitată de construcţia mai complicată care determină un cost ridicat.
3.2. MATERIALE UTILIZATE PENTRU EXECUŢIAELEMENTELOR COMPONENTE ALE ŞURUBURILORCU BILE.
La stabilirea materialelor elementelor componente ale transmisieişurub-piuliţă cu bile se are în vedere realizarea condiţiilor de capacitateportantă, durabilitate şi precizie a funcţionării.
Pentru transmisiile de mare precizie se utilizează oţeluri aliate pentruconstrucţia de maşini (13 CrNi 30; 21 TiMoCr 12; 38 MoCrAl 09, STAS791-80), oţeluri de rulmenţi (RUL 1, RUL 2 - STAS 1456/1-89), oţelurialiate de scule, tratate termic sau termochimic, realizându-se pentruduritatea suprafeţelor valori de minimum 60 HRC. În cazul transmisiilorobişnuite, fără condiţii de precizie deosebite, duritatea suprafeţelor poate săfie şi sub valoarea menţionată.
Corpul piuliţei şi bilele se confecţionează din oţel pentru rulmenţiRUL 1 sau RUL 2 - STAS 1456/1-89 călit integral la 60 - 62 HRC. Şurubulse confecţionează în mod obişnuit din oţel carbon de calitate, OLC 55X -STAS 880-88, călit pe flancuri (CIF) la 58-60 HRC.
Atunci când se impun cerinţe speciale de zgomot, pentru bile se potutiliza unele materiale plastice: poliformaldehide (delrin), politetrafluor-etilenă (teflon), etc.
3.3. PARAMETRII CONSTRUCTIVI.
Tendinţa de utilizare tot mai largă a transmisiilor cu şuruburi cu bilea determinat măsuri de tipizare a acestora, pornindu-se de la o serie deparametri constructivi. În anul 1975 a fost editată norma ISO 3408 careprezintă combinaţiile posibile de diametre nominale şi paşi (tabelul 3.1).

116 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Şuruburi cu bile. Diametre şi paşi (după ISO 3408/75) Tabelul 3.1Diametrul
d,mm
Pasul p, mm
Valori preferate Valori posibile
6 2,5 28 ;10 2,5 3
12 2,5 ; 5 3 ; 416 2,5 ; 5 3 ; 4 ; 620 5 3 ; 4 ; 6 ; 825 5 ; 10 4 ; 6 ; 8
32 ; 40 5 ; 10 4 ; 6 ; 8 ;1250 5 ; 10 6 ; 8 ; 12 ; 1663 5 ; 10 ; 20 6 ; 8 ; 12 ; 1680 10 ; 20 6 ; 8 ; 12 ; 16100 10 ; 20 8 ; 12 ; 16
125 ; 160 ; 200 10 ; 20 12 ; 16
Alegerea diametrului bilelor se face pe baza unui compromis întrecapacitatea portantă şi precizia cinematică. Creşterea diametrului bilelor şi anumărului acestora asigură creşterea capacităţii portante a transmisiei,realizând însă o micşorare a preciziei cinematice, ca urmare a creşteriiabaterilor de prelucrare şi a repartiţiei mai neuniforme a sarcinii pe bile. Dinaceste cauze diametrul bilelor se limitează în funcţie de pasul filetului:
p,...,dw 650550 (3.1)
Se recomandă alegerea bilelor cu diametre standard, adoptând: 115,0...08,0 ddw (3.2)
unde: 1d - diametrul interior al şurubului.Diametrele pentru bilele
care se utilizează în construcţia derulmenţi sunt standardizate peplan internaţional (tabelul 3.2conform SR ISO 3290:1995).
Obişnuit, toate bilele auacelaşi diametru (fig. 3.2 a); launele construcţii în vedereacreşterii randamentului şi areducerii uzurii se folosesc bile dedouă dimensiuni (fig. 3.2 b).
Bilele intermediare separatoare executate din bronz sau materiale plastice audiametrul cu 0,2- 0,05 mm mai mic decât cel al bilelor principale.
Fig. 3.2

Capitolul 3. Şuruburi de forţă cu rostogolire 117
Pasul filetului se calculează cu relaţia: 5...1 wdp , mm (3.3)
cu rotunjirea acestuia la un număr întreg conform tabelului 3.1.
Diametre şi mase pentru bile utilizate în construcţia rulmenţilor Tabelul 3.2Diametrul
nominal wd MasaDiametrul
nominal wd MasaDiametrul
nominal wd Masa
mm in kg/1000buc
mm in kg/1000buc
mm in kg/1000buc
0,30,40,50,60,7
0,7941
1,21,5
1,5852
2,3812,53
3,1753,5
3,9694
4,54,762
55,5
5,5566
–––––
1/32–––
1/16–
3/32––
1/8–
5/32––
3/16––
7/32–
0,110,260,510,881,512,064,117,1
13,916,532,955,564,2111132177257263374446514679702882
6,356,57
7,1447,5
7,938
88,5
8,7319
9,525
1010,319
1111,11211,5
11,90612
12,512,713
1/4––
9/32–
5/16
––
11/32–
3/8
–13/32
–7/16
–15/32
––
1/2–
1,031,131,41
1,501,742,06
2,102,522,663,003,55
4,114,435,475,646,206,937,107,968,429,03
13,49413,514
14,28815
15,081
15,515,875
1616,669
17
17,46218
18,25619,05
19,84420
20,63821
21,43122
17/32––
9/16–
19/32
–5/8–
21/32–
11/16–
23/323/4
25/32–
13/16–
27/32–
10,0010,1011,30
12,0013,9014,10
15,2016,5016,8019,1020,20
21,9024,0025,0028,4032,4032,9036,2038,1040,0043,80
Unghiul de înclinare a spirei şurubului:
0
arctgd
p
(3.4)
Geometria contactului bilă - căi de rulare influenţează hotărâtorperformanţele transmisiei cu şuruburi cu bile [10, 11]. Căile de rulare se potrealiza cu profil curbiliniu, rectiliniu sau combinat.
Profilele curbilinii cu contact în două puncte (fig. 3.3 a) şi ogivalecu contact în patru puncte (fig. 3.3 b şi c) sunt cel mai frecvent utilizate înconstrucţia şuruburilor cu bile. Pentru obţinerea unei capacităţi portante

118 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
maxime se impune ca în punctele de contact raportul razelor de curbură alecelor două elemente (bilă – cale de rulare) să fie cuprins între 0,95 şi 0,97[11].
După [15,16] se recomandă ca raza căii de rulare R să se adopte wdR 53,0...51,0 ; se face şi precizarea: pentru mm8wd wdR 51,0 ,
iar pentru mm8wd wd,R 530 .
Unghiul de contact are de asemenea o influenţă directă asupraperformanţelor unei astfel detransmisii. În fig. 3.4 sunt prezentatedependenţele forţei axiale limită Fa,rigidităţii axiale c şi randamentului de unghiul de contact (cazul =90 este considerat optim) [9, 10].Obţinerea unui profil cu = 90ridică probleme tehnologice dificile;marea majoritate a firmelorconstructoare realizează acesteprofile cu = 45. În cazul unorunghiuri de contact mari se impunmăsuri constructive speciale pentrureducerea jocurilor axiale.
Fig. 3.3
Fig. 3.4

Capitolul 3. Şuruburi de forţă cu rostogolire 119
Profilele rectilinii de formă triunghiulară, trapezoidală saudreptunghiulară (fig. 3.3 d, e, şi f) sunt constructiv mai simple decâtprofilele curbilinii, asigurând totodată o menţinere constantă a unghiului decontact , fapt ce are o importanţă deosebită pentru stabilitatea mişcării.Dezavantajul profilelor rectilinii constă în capacitatea portantă multinferioară profilelor curbilinii, motiv pentru care au utilizare limitată latransmisiile cu rol cinematic unde nu există solicitări importante.
Dimensiunile care definesc profilul sunt tipizate prin norme stabilitede firmele constructoare. Pentru profilele curbilinii (fig. 3.5) dimensiunile sedetermină cu relaţiile [9, 14]:
R,...,Rr 970950 (3.5)
.r,r;r,r 15020 43 (3.6)
.sinrRc;cosrRc 21 (3.7)
101 2 cRdd (3.8)
3302 2 rcosrrdd (3.9)
4401 2 rcosrrdD (3.10)
102 2 cRdD (3.11)
Fig. 3.5

120 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
ra 180 (3.12)
Numărul de începuturi se ia de obicei egal cu 1 deoarece unghiulelicei are o influenţă mică asupra randamentului.
Înălţimea piuliţei se calculează în funcţie de numărul de spireminim im şi de pasul profilului:
p,...iH m 511 (3.13)
Numărul minim de spire im se determină în funcţie de numărul despire active ia (tabelul 3.3). Numărul de spire active se determină pe bazanumărului de bile z necesare preluării sarcinii exterioare:
cosd
dzi w
a0
(3.14)
Numarul de bile z se determină din condiţiile de rezistenţă lasolicitarea de contact.
Numărul minim de spire Tabelul 3.3
Numărul de spire active 2.5 3.5 5.0 10.5Numărul minim de spire alpiuliţei 4.5 5.5 7.5 13.5
Numărul de bile din spirele active se poate determina şi cu relaţia:
10 w
a
d
idz
(3.15)
unde:ia - numărul de spire active dintr-un circuit de lucru închis. Numărul
de spire active se ia în general destul de mic. În acest sens se recomandă caia = 1…2,5. În cazul unui număr mai mare de spire active randamentultransmisiei elicoidale cu bile se reduce datorită creşterii frecărilor dintrebile.
dw – diametrul bilei.Dacă din calculul lui z rezultă un număr fracţionar, acesta se
rotunjeşte la cel mai mic număr întreg.Numărul de bile care se găsesc într-un circuit închis nu trebuie să
depăşească z = 65. Creşterea lui z duce la reducerea randamentului. Dacăprin calcul se ajunge la z > 65, trebuie să se reducă numărul de bile prinmărirea diametrului lor.

Capitolul 3. Şuruburi de forţă cu rostogolire 121
Capacitatea de încărcare a transmisiei este cu atât mai mare, cu câteste mai mare diametrul bilelor.
Numărul de bile din zona pasivă se determină în funcţie deconstrucţia aleasă şi de lungimea canalului de întoarcere.
Pentru distribuţia uniformă a sarcinii pe bile, acestea trebuie aleseastfel încât diferenţa diametrelor să nu depăşească 3 m.
Deoarece bilele de clasă normală a preciziei se execută cu un câmpde toleranţe mult mai mare (până la 50 m), la asamblarea şurubului cu biletrebuie să se sorteze iniţial bilele pe serii de dimensiuni care se vorîmperechea cu şuruburi corespunzătoare. Prin alegerea selectivă aşuruburilor şi a grupelor de bile corespunzătoare se obţine precizia cerută.
Jocul radial (fig. 3.6) se poate determina cu relaţia: 121 2 ddDc w (3.16)
Dacă condiţiile tehnice privind mărimea jocului radial nu suntstabilite, atunci în calcule se poate recomanda c1 = 0,03…0,12 mm.
Dependenţa dintre jocul axial (fig. 3.7) şi jocul radial este exprimatăprin relaţia:
12 2 cdRc w (3.17)
unde:c2 –este jocul axial;R – raza de curbură a căii de rulare a şurubului.
Fig. 3.6 Fig. 3.7

122 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
3.4. CALCULUL TRANSMISIEI ŞURUB - PIULIŢĂCU BILE.
Criteriile care trebuie considerate la calculul transmisiei şurub -piuliţă cu bile sunt: rezistenţa la solicitarea de contact (în regim static pentruevitarea deformaţiilor plastice şi în regim de rostogolire pentru asigurareadurabilităţii impuse); rigiditatea axială; stabilitatea elastică (flambaj şivibraţii), randamentul mecanic.
3.4.1. Dimensionarea şurubului.Dimensionarea şurubului pentru forţe axiale 1000F N se face din
condiţia de rezistenţă la compresiune:
acnec
Fd
4
1 (3.18)
unde: 204030 ,ac ,..., .
Pentru sarcini axiale 1000F N, diametrul minim necesar sedetermină din condiţia de stabilitate la flambaj [13]:
43
2
1
64
E
cLd ff
min
(3.19)
cu Lf din fig. 3.8 şi coeficientul de siguranţă 4...5,2fc .
De asemenea se recomandă să existe următoarea relaţie întrelungimea şurubului şi diametrul său: 25/ 0 dl . Pentru şuruburi deprecizie, în mecanica fină, 15/ 0 dl .
Elementele geometrice ale profilului filetului se determină pornindde la d1 calculat, încadrând elementele standardizate în şirurile de valoriindicate de norme. În acest scop se vor utiliza şi relaţiile geometrice.
Fig. 3.8

Capitolul 3. Şuruburi de forţă cu rostogolire 123
3.4.2. Sarcina (încărcarea) axială.Transmisia şurub - piuliţă cu bile este solicitată, în cazul cel mai
frecvent, de o forţă exterioară axială F, care teoretic se consideră repartizată
uniform pe numărul z de bile din zona de lucru (fig. 3.9). Între şurub şipiuliţă forţa se transmite prin intermediul bilelor, sub forma unei forţenormale nF , orientată după direcţia liniei de contact. Folosind condiţiile deechilibru static se determină componentele: axială aF , radială rF şitangenţială tF (fig. 3.9):
ca zFF (3.20)
ct ztgFF (3.21)
costgzFF cr (3.22)
cossinzFF cn (3.23)
Prin introducerea unghiului de frecare relaţiile (3.213.23) ţin seama şi de prezenţaforţelor de frecare dintre suprafeţele aflate încontact.
În cazul unei transmisii reale, datorităerorilor de profil ale bilelor şi ale căilor de rulare,forţa este preluată de un număr de bile zc, inferiornumărului teoretic z [20, 26]:
zc =(0,70,9) z (3.24)Sub acţiunea forţei normale nF bilele şi
căile de rulare sunt supuse unei solicitări de contact punctiform (fig. 3.10),rezultând o stare de tensiuni spaţială. Prin particularizarea relaţiilor generaleale contactului elastic au fost obţinute relaţiile (3.25) – (3.27), cu care se
Fig. 3.9
Fig. 3.10

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI124
determină tensiunea maximă max de pe suprafaţa de contact, deformaţia pe direcţia forţei nF şi semiaxa mare a a elipsei de contact [13, 27]:
3
22
2
0
0493321
rR
rREF
rR
cosrrrR,, nmax
(3.25)
3
22
0
0711411
rR
rR
E
F
rR
cosrrrR,, n
(3.26)
3
22
0
0980321
rR
rR
E
F
rR
cosrrrR,,a n
(3.27)
După [5,19] tensiunea maximă de contact se poate stabili, calculândmai întâi sarcina axială specifică:
cosikdz
Fp
aw2
1
(3.28)
unde:z1 – numărul de bile dintr-o spiră activă; dw – diametrul bilelor;k – coeficient de neuniformitate a încărcării bilelor; de obicei se
admite k = 0,8; ia – numărul de spire active.Deoarece unghiul elicei este mic, se poate admite:
awkidz
Fp
21
(3.29)
Cu valoarea calculată a lui p poate fi determinată tensiunea maximă
max pentru o valoare prescrisă a jocului radial relativ:wd
c1 (fig. 3.11,
3.12 şi 3.13).Valoarea tensiunii maxime admise este [max]ad.= 5000 MPa pentru
suprafeţele în contact ale şurubului şi piuliţei cu duritatea HRC 53 şiduritatea bilelor HRC 63.
Dependenţa unghiului de contact faţă de max este dată în fig. 3.14.Forţa axială statică capabilă a fi preluată de o transmisie cu şurub cu
bile, este:
awstst ikdzpF 21 (3.30)
unde:
stp - sarcina specifică statică admisă, care se determină conform fig.3.15 în funcţie de jocul radial relativ .

Capitolul 3. Şuruburi de forţă cu rostogolire 125
Fig. 3.11
Fig. 3.12

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI126
Fig. 3.13
Fig. 3.14

Capitolul 3. Şuruburi de forţă cu rostogolire 127
3.4.3. Sarcina (încărcarea) radială.Schema de încărcare este prezentată în fig. 3.16.Tensiunea maximă de contact pentru suprafaţa elicoidală a şurubului
este:
322
12
1
12451890
Rddz
Q
w
zmax
(3.31)
iar pentru suprafaţa elicoidală a piuliţei:
322
22
1
12451890
RDdz
Q
w
zmax
(3.32)
unde:R,D,d,dw 21 în mm, în MPa.
Valorile coeficientului sunt date în tabelul 3.4 în funcţie devaloarea lui :
- pentru şurub:
222
2
222
124
12
RDd
RD
w
(3.33)
- pentru piuliţă:
221
2
221
124
12
Rdd
Rd
w
(3.34)
Fig. 3.15 Fig. 3.16

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI128
Forţa radială statică capabilă a fi preluată de transmisia cu şurub cubile va fi:
21 wstst dzqQ (3.35)
unde:
stq - sarcina specifică statică admisă, care se determină din fig. 3.15în funcţie de jocul radial relativ .
Valorile coeficienţilor şi Tabelul 3.4
0,0000 1,000 0,7620 1,208 0,8428 1,306 0,9100 1,4550,0466 1,001 0,7702 1,215 0,8468 1,312 0,9134 1,4660,1075 1,003 0,7743 1,220 0,8507 1,318 0,9428 1,5880,1974 1,008 0,7784 1,223 0,8545 1,325 0,9458 1,6060,2545 1,025 0,7825 1,228 0,8584 1,332 0,9488 1,6230,3204 1,025 0,7866 1,232 0,8661 1,346 0,9517 1,6430,3954 1,038 0,7907 1,237 0,8699 1,354 0,9574 1,6820,4795 1,060 0,7948 1,240 0,8737 1,362 0,9705 1,8080,5342 1,078 0,7988 1,246 0,8774 1,370 0,9818 1,9850,5819 1,092 0,8069 1,256 0,8811 1,378 0,9909 2,2680,6113 1,108 0,8110 1,260 0,8849 1,388 0,9973 2,8550,6521 1,128 0,8150 1,266 0,8885 1,395 1,0000 –0,6716 1,140 0,8190 1,270 0,8922 1,404 – –0,7126 1,168 0,8230 1,277 0,8958 1,416 – –0,7332 1,182 0,8310 1,288 0,8994 1,423 – –0,7538 1,200 0,8350 1,293 0,9030 1,432 – –0,7579 1,204 0,8389 1,300 0,9065 1,444 – –
3.4.4. Capacitatea de încărcare statică.Capacitatea statică C0 este o mărime importantă în cazul
transmisiilor şurub - piuliţă cu bile care lucrează la turaţii foarte reduse (sub10 rotaţii pe minut) şi reprezintă sarcina axială maximă care poate fisuportată, fără depăşirea unei valori limită pentru tensiunea hertzianămaximă max sau pentru deformaţia plastică de contact.
Dacă se limitează valoarea tensiunii hertziene maxime max ,
expresia capacităţii statice 0C se determină, utilizând relaţiile (3.25) şi(3.23):
26
0
0
2
2
3
0
493321
R
rR
rR
cosrrrR,,
cossinrz
EC cmax
(3.36)

Capitolul 3. Şuruburi de forţă cu rostogolire 129
Când duritatea suprafeţelor în contact este minimum 60 HRC,tensiunea hertziană maximă se poate lua max = (2,53)·103 MPa. Pentrudurităţi mai reduse se poate utiliza relaţia propusa de G.A. Levit [20] şiD.M. Reşetov [27]:
HB,max 54 , MPa (3.37)
Dacă se limitează valoarea deformaţiei plastice de contact = 10-4 d,expresia capacităţii statice se determină, utilizând relaţiile (3.26) şi (3.23):
213
0
0
623
0
171411
10
rR
rR
rR
cosrrrR,,
cossindEzC wc
(3.38)
Pentru transmisiile cu funcţionare foarte lentă, relaţiile (3.36) şi(3.38) pot servi pentru calculul numărului de bile z. În acest scop seînlocuieşte capacitatea de încărcare statică cu forţa statică echivalentă Fes
care se calculează cu relaţia:'Hes fFF (3.39)
în care coeficientul 'Hf ia în considerare influenţa durităţii suprafeţelor în
contact (fig. 3.17).După [13]:
FcossinHV
dz,C ,ws
3502
0 840140 (3.40)
în care:C0 - este capacitatea statică de încărcare axială, în N;zs - numărul de bile portante; sz,...,z 4111 - numărul total de bile; 2211 000 wdr;dr;rcosrRr .
În general, pentru d0=(10…250 mm): ;..., 1030 ;,...,rr 0200700 .,...,Rr 960090
HV - duritatea Vickers;dw - diametrul bilei, în mm.
3.4.5. Sarcina dinamică de bază şi durabilitatea.Ca şi în cazul celorlalte organe de maşini care sunt supuse unei
solicitări de contact cu rostogolire (rulmenţi, angrenaje), oboseala de contactreprezintă principalul criteriu de ieşire din uz. Se defineşte sarcina

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI130
dinamică de bază ca fiind oforţă pur axială, de valoareşi direcţie constante, careacţionând asupra unui lot detransmisii cu şuruburi cubile, aparent identice,determină, după un numărde 106 rotaţii ale şurubului,scoaterea din uz a 10% dintransmisii. Pe baza unoranalogii cu rulmenţii radial-axiali cu bile, S.I. Pavlov[26] stabileşte pentrucalculul capacităţii dinamicede bază relaţia:
2
270
0201650
w
w,
d,
cossindzC
, N (3.41)
Între sarcina dinamică de bază C, forţa axială F şi durabilitatea Lse admite existenţa relaţiei (3.42), specifică calculului rulmenţilor:
310 eFCL , 106 rotaţii (3.42)în care forţa dinamică echivalentă Fe se determină cu relaţia:
Hde ffFF (3.43)
Coeficientul dinamic fd se alege din tabelul 3.5, iar coeficientul deduritate fH din fig. 3.17.
Coeficientul dinamic fd [12] Tabelul 3.5Regim de funcţionare fd
Turaţie mică, forţă fără şocuriCondiţii normaleTuraţii obişnuite, forţe cu şocuri
1,0 - 1.21.2 - 1.51.5 - 2.5
Durabilitatea 10L (milioane de rotaţii) se determină în funcţie dedurabilitatea hL10 (ore) cu relaţia:
610
1010
60 hLnL (3.44)
Fig. 3.17

Capitolul 3. Şuruburi de forţă cu rostogolire 131
Dacă transmisia funcţionează într-un regim nestaţionar, fiindsolicitată câte un număr de ore hi la o sarcină iF şi o turaţie ni (i = 1, 2, ,
m), elementele de calcul F şi n se determină cu relaţiile:31
11
mi
iii
mi
iiii hnhnFF (3.45)
mi
ii
mi
iii hhnn
11(3.46)
Folosind relaţiile (3.41) … (3.43) se determină numărul de bile znecesar pentru obţinerea unei durabilităţi L sub o sarcină F:
47010
710
2
25 0201
10589 ,
w
w
H
d Lcossind
d,
f
fF,z
(3.47)
3.4.6. Randamente.Notând cu unghiul de frecare de rostogolire, pentru calculul
randamentului transmisiei şurub - piuliţă cu bile se aplică relaţiile stabilitepentru transmisia cu şurub cu frecare de alunecare.
Pentru cazul în care şurubul este elementul motor, rezultând omişcare de translaţie pentru piuliţă, se aplică relaţia (3.48), iar pentru cazulîn care piuliţa este element motor, rezultând o mişcare de rotaţie pentruşurub, se aplică relaţia (3.49):
tg
tg(3.48)
tg
tg' (3.49)
Unghiul de frecare de rostogolire se calculează în funcţie decoeficientul f de frecare lamişcarea de rostogolire:
sinrftg (3.50)Pentru bile din oţel
călit care se rostogolesc pesuprafeţe din oţel călit curugozitatea medie 0,2 m,f = (810)·10-3 mm; dacăbilele se rostogolesc pesuprafeţe din oţel necălit,f = (5080)·10-3 mm [26].Fig. 3.18

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI132
Condiţia de autofrânare este: (3.51)
La transmisiile fără pretensionare, unghiul de frecare având valorifoarte mici, condiţia de autofrânare nu este îndeplinită.
În fig. 3.18 este prezentată dependenţa randamentului de unghiulelicei şi de unghiul de contact . Se observă că, până la = 30, randamentuleste puternic dependent de valoarea unghiului , după care rămâne practicneschimbat, menţinându-se în limitele = 0,90,95 (fig. 3.18 a). Creştereaunghiului de contact între 0 şi 450 conduce la creşterea randamentului dela 0 la 0,90. Creşterea unghiului de contact peste 450 este însoţită decreşteri nesemnificative ale randamentului (fig. 3.18 b).
3.4.7. Etapele calculului de proiectare a şuruburilor cu bileîncărcate cu forţe axiale.
1. Cunoscând forţa axială F, conform § 3.4.1 se determină diametrulinterior d1 al şurubului (v. relaţia 3.18). Pentru şuruburile lungi diametrulinterior se determină din condiţia de stabilitate la flambaj (v. relaţia 3.19).
2. Se alege diametrul standard al bilelor folosind relaţia 3.2 şi tabelul3.2.
3. Se alege pasul filetului şurubului utilizând relaţia 3.3 şi tabelul3.1.
4. Se adoptă raza căii de rulare wdR 58,0...51,0 , mm.
5. Se determină deplasarea pe direcţie axială a centrelor razelor decurbură ale profilelor căilor de rulare ale şurubului şi piuliţei faţă de centrul
bilei: sind
Rc w
22 .
6. Se calculează diametrul cercului pe care se aşează centrele bilelor: 210 2 cRdd .
7. Se determină diametrul interior al piuliţei: 202 2 cRdD .
8. Se determină diametrul exterior al şurubului d2 şi diametrulexterior al filetului piuliţei D1 în funcţie de adâncimea adoptată a profilului:
wd,...,h 35030 ; hdd 212 ; hDD 221 .
Valori mai mici pentru h se adoptă la şuruburile cu bile care preiausarcini axiale mici, iar valori mai mari la şuruburile care preiau sarciniaxiale mari.
9. Se calculează unghiul α de înclinare a spirei şurubului (v. relaţia3.4).

Capitolul 3. Şuruburi de forţă cu rostogolire 133
10. Se calculează unghiul φ de frecare de rostogolire (v. relaţia 3.50).11. Se determină randamentul transmisiei cu şurub cu bile (v. relaţia
3.48).12. Se calculează puterea necesară deplasării şurubului cu o viteză
impusă:
1000
vFP , kW
unde:F – forţa axială, în N;v – viteza axială de deplasare, în m/s;13. Se calculează turaţia necesară piuliţei:
inp
vn
60 , rot/min
unde:v – viteza axială de deplasare, în m/s;p – pasul filetului, în m;ni – numărul de începuturi.14. Se determină numărul de bile din spirele active (v. relaţia 3.15) şi
din zona pasivă în funcţie de construcţia aleasă şi de lungimea canalului deîntoarcere. Dacă numărul de bile din spirele active 65z , se va reducenumărul acestora prin mărirea diametrului lor.
Dacă se impune o anumită durabilitate 150001000010 ...L h ore,
atunci numărul de bile din zona activă se poate determina cu relaţia 3.47.15. Se determină jocul radial (v. relaţia 3.16). Dacă nu sunt impuse
alte condiţii, se recomandă mm,...,c 1200301 .
16. Se determină jocul radial relativwd
c1 .
17. Se calculează sarcina (încărcarea) axială specifică p (v. relaţia3.28).
18. După determinarea valorii lui p se poate determina tensiuneamaximă max în funcţie de valoarea jocului radial relativ (v. fig.
3.11…3.13). Dacă aceasta va depăşi valoarea tensiunii de contact admise semăreşte numărul de spire active im.
După [5, 19], 5000admax MPa când duritatea suprafeţelorşurubului şi piuliţei în contact HRC 53, iar duritatea bilelor HRC 63.

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI134
După alţi autori, [20, 27], când duritatea suprafeţelor în contact esteminim 60 HRC se poate lua 310352 ...,admax , MPa sau
HB,admax 54 , MPa.
Dependenţa unghiului de contact faţă de max este dată în fig.3.14.
19. Se calculează sarcina statică capabilă a fi preluată de transmisiestF (v. relaţia 3.30) sau capacitatea de încărcare statică C0 (v. relaţiile 3.36,
3.38 sau 3.40), astfel ca FFst sau FC 0 .
20. Dacă se cere durabilitatea transmisiei 10L sau hL10 , se va
determina mai întâi sarcina dinamică de bază C (v. relaţia 3.41) şi apoi se vaaplica relaţia 3.42.
3.5. ELEMENTE CONSTRUCTIVE.3.5.1. Şurubul.Constructiv, şuruburile se execută cu secţiunea plină (la diametre
mici) sau cu secţiune inelară (fig. 3.19).
3.5.2. Piuliţa.În majoritatea cazurilor, piuliţa se execută din acelaşi material ca şi
şurubul. De obicei se utilizează oţeluri aliate cu crom.Din punct de vedere constructiv, piuliţele pot fi:- cu unul sau mai multe începuturi;- cu o secţiune sau mai multe secţiuni; în fig. 3.20 este reprezentată o
piuliţă cu două secţiuni.Diametrul mediu, d0, se determină din considerente constructive, din
condiţiile de rezistenţă sau, în cazul şuruburilor lungi, din condiţia deflambaj, precum şi în funcţie de dimensiunile bilelor. Din punctul de vedereal durabilităţii este necesar să se aleagă bile cu diametre mari; totuşi, acest
Fig. 3.19

Capitolul 3. Şuruburi de forţă cu rostogolire 135
lucru duce la mărirea lui d0 şi prin urmare la mărirea gabaritului, a greutăţii,precum şi a forţelor de inerţie.
Unghiul de înclinare, , se alege în funcţie de randamentul impustransmisiei (relaţia 3.48 şi fig. 3.18 a). Cunoscând diametrul mediu şiunghiul de înclinare se determină pasul spirelor. Pentru piuliţa cu unînceput se impune condiţia ca p 2,5 d. Dacă p 2,5 d, atunci se alegpiuliţe cu două sau trei începuturi.
Numărul spirelor se determină constructiv în funcţie de condiţiile delucru ale mecanismului. Şi în acest caz îşi păstrează valabilitatea concluziilecu privire la repartiţia sarcinilor pe bile. Astfel, după unele date, repartiţiasarcinii, în acest caz, se prezintă astfel: prima spiră 55 – 65 %; a doua spiră25 – 35 %; a treia spiră 7 – 11 %; a patra spiră 1%.
Ţinând seama pe de altă parte şi de caracterul mişcării (rostogolire) serecomandă ca numărul de spire lucrătoare să se ia destul de mic. În acestsens se recomandă ca numărul de spire active să se ia de la 1,66 până la 2,5.
Numărul total de spire: 0251 ,...,ii a (3.52)
unde: (1,5…2,0) sunt aşa-zisele spire parazite; se aleg din motiveconstructive.
Fig. 3.20

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI136
Recomandările cu privire la numărul de spire active şi totale îşi auvalabilitatea pentru fiecare secţiune a piuliţei, pentru piuliţelemultisecţionale.
Asupra numărului de spire, o influenţă însemnată are şi numărultotal de bile ztot (atât în spirele active, cât şi în canalele de întoarcere). Dacăztot > 60, atunci cresc pierderile prin frecare. De aceea, în acest caz serecomandă să se mărească diametrul bilelor.
Pentru canalele de formă dreptunghiulară sau piuliţe multisecţionale,la fiecare branşament se recomandă ztot < 40…45 bile (pentru a nu semicşora prea mult randamentul). După alegerea numărului de spire şi bile seface o verificare din punctul de vedere al rezistenţei la încovoiere şisolicitarea de contact.
Spirele active sunt mărginite de orificii care fac legătura cu canalulde întoarcere a bilelor. Aceste orificii se plasează astfel încât axa lor să fietangentă la linia elicoidală a canalelor cu diametrul d0.
Aducerea bilelor în canalul de întoarcere, precum şi aducerea lor înpiuliţă se face prin intermediul unor deflectoare speciale.
3.5.3. Organe de direcţie (deflectoare).În fig. 3.21 este arătată trecerea bilelor din canalele lucrătoare în
canalul de întoarcere.
Fig. 3.21 Fig. 3.22
Fig. 3.23

Capitolul 3. Şuruburi de forţă cu rostogolire 137
Piesa (3), care uşurează această trecere, este dintele deflectorului, (1)fiind şurubul, (2) – piuliţa, iar (4) – capacul. S-a constatat că, cu cât este maimic jocul a, dintre profilul canalului şi dintele deflectorului, cu atât trecereaeste mai lină şi cu atât pierderile prin frecare (la trecere) sunt mai mici.
Valorile recomandate pentru jocul a sunt 0,3 – 0,5 mm, iar uneori seajunge şi la 0,1- 0,2 mm.
Trecerea bilelor este influenţată şi de raza rtr. Cu cât este mai mareaceastă rază, cu atât trecerea este mai lină şi frecarea mai mică. Totuşi,pentru raze rtr mari spaţiul x se măreşte şi se iveşte primejdia înţepeniriibilelor (fig. 3.22). De aceea nu se recomandă să se ia valori prea mari pentrurtr . Constructiv, pentru piuliţele cu o secţiune, deflectoarele pot fi în formăde şaibe (fig. 3.23), şi de bucşe (fig. 3.24), iar pentru piuliţe cu douăsecţiuni, în formă de bucşă dublă (fig. 3.25). În cazul piuliţelor cu mai multe
Fig. 3.24
Fig. 3.25

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI138
începuturi, fiecare început are deflectorul său special (fig. 3.26).Deflectoarele (2) (fig. 3.26) se îmbină cu piuliţa (1) prin intermediul
şuruburilor, fiind acoperite prin capacul (4). Uneori, la capetele frontale semontează garnituri de etanşare (5).
Există soluţii la care organele de întoarcere a bilelor se fac prinexterior (fig. 3.27), printr-un canal de derivaţie. În acest caz, raza la trecereabilelor, rtr, este limitată de grosimea bucşei exterioare, care se îmbină cupiuliţa prin şuruburi. Deoarece prelucrarea canalelor interioare este destul degreoaie, unele firme utilizează drept canale de întoarcere ţevi cilindrice (vezi
fig. 4.31), care se montează înorificiile piuliţei şi ale căror axesunt tangente la canalele cudiametrul d0. Diametrul tubului seia de 1,03 d.
Această soluţie micşoreazămult grosimea corpului piuliţei.Totuşi, ea prezintă o serie de
dificultăţi la montaj şi se poate utiliza numai în cazurile în care există spaţiusuficient pentru aceasta.
Organele de direcţie, fie exterioare, fie interioare, se fac de obiceidin oţeluri cementate sau nitrurate cu duritate mărită, cu o bună rezistenţă lafenomenul de oboseală de contact (pitting).
Fig. 3.26
Fig. 3.27

CAPITOLUL 4SOLUŢII CONSTRUCTIVE
4.1. SOLUŢII CONSTRUCTIVE DE MECANISMECU ŞURUBURI CU MIŞCARE DE ALUNECARE.
4.1.1. Cric cu piuliţă fixă.Cricul cu şurub şi piuliţă fixă se utilizează pentru ridicarea unor
sarcini mijlocii şi mari. În fig. 4.1 se prezintă o primă variantă constructivăîn care şurubul (1) execută mişcarea de rototranslaţie, iar piuliţa (2) este fixăîn corpul (4) executat prin turnare. Asigurarea piuliţei împotriva rotirii seface prin ştifturile filetate cu cep (3).
Şurubul preia sarcina prin intermediul cupei (6), montată peextremitatea superioară şi asigurată împotriva deplasării pe verticală prinştifturile filetate cu cep (7).
Acţionarea şurubului se face cu manivela (5). Cursa şurubului estelimitată prin opritorul (8).
În fig. 4.2 se prezintă o a doua variantă, bazată pe acelaşi principiude funcţionare, deosebindu-se de prima variantă prin faptul că: acţionarea seface printr-un mecanism compus dintr-o roată de clichet (4) montată cu pana(14) pe şurubul (2), clichetul orizontal (10) fixat cu bolţul (12) în manivela(9) (construcţie sudată), pistonaşul (6), arcul (7) şi talerul de arc (8).Deplasarea pe verticală a mecanismului de acţionare este împiedicată de uninel elastic şi un guler de sprijin de pe şurub. Corpul (1) al cricului este oconstrucţie sudată. Cupa (5) are o configuraţie mai simplă, iar asigurarea eise face prin intermediul unei şaibe plate fixată cu şuruburile (20).
În fig. 4.3 se prezintă a treia variantă constructivă la care piuliţa esteexecutată direct în corpul (4) al cricului care este o construcţie turnată.
Mecanismul de acţionare (5) este cu clichet vertical compus din:roata de clichet (9) fixată pe şurubul (1) printr-o asamblare cu suprafeţepoligonale, clichetul vertical (11) fixat de manivela (5) prin bolţul (12) şiasigurat de către ştiftul conic (10), prelungitorul (13). Deplasarea peverticală a mecanismului de acţionare este blocată de bucşa (2) fixată peşurub cu ştifturile filetate (3).

140 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 141

142 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 143
Cupa (6) are altă formă, iar limitatorul de cursă (8) al şurubului esteun inel elastic montat într-un canal executat în partea inferioară a şurubului.
Varianta prezentată în fig. 4.3 se poate folosi în cazul unor serii maride fabricaţie.
4.1.2. Cric cu piuliţă rotitoare.În fig. 4.4 este prezentat un cric cu piuliţă rotitoare, cu manivelă cu
clichet vertical (14), la care corpul cricului (1) şi manivela (9) se obţin printurnare. Roata de clichet (8) este montată pe piuliţă prin pana (17). Mişcareade rotaţie a şurubului (5) este împiedicată de proeminenţele în formă depene ale unei piese (4) montată pe capătul inferior al şurubului (piesărealizată prin sudare), acestea servind totodată şi la ghidarea şurubului.Clichetul vertical (17) este fixat pe manivelă prin intermediul unui şurubspecial(15). Se poate constata că piesele turnate au fost prevăzute cu raze deracordare, grosimea pereţilor este uniformă, evitându-se astfel aglomerărilede material. Corpul cricului a fost prevăzut cu două nervuri de rigidizare,necesare ţinând seama de raportul mare dintre diametrul tălpii şi cel alcorpului.
Cricul cu piuliţă rotitoare prezentat în fig. 4.5 are următoareleparticularităţi:
- corpul cricului (1) este sudat şi alcătuit din 3 piese care pot fiobţinute din semifabricate laminate;
- manivela cricului este cu clichet orizontal, corpul maniveleiputându-se realiza prin forjare sau turnare;
- piuliţa rotitoare (5) este centrată în corpul cricului prin intermediulrulmentului axial (4) (prezintă dezavantajul creşterii gabaritului radial alpiuliţei).
Varianta prezentată în fig. 4.6 reprezintă un cric cu piuliţă rotitoare,la care corpul este de construcţie sudată şi la care roata de clichet face corpcomun cu piuliţa. Cricul se acţionează prin intermediul unei manivele cuclichet orizontal, care, pentru a putea fi montată, este executată din douăpărţi îmbinate prin intermediul unor şuruburi şi centrate cu ajutorul a douăştifturi. Între extremităţile libere ale pieselor care formează manivela esteintrodusă o plăcuţă de distanţare.
4.1.3. Cricul telescopic şi cricul telescopic cu dublă acţiune.Cricurile telescopice şi cele telescopice cu dublă acţiune sunt
prezentate în fig. 4.7 – 4.12.Termenul de “telescopic” indică faptul că acest cric este construit din
tronsoane de diametre diferite astfel încât tronsonul de diametru mai mic sepoate deplasa axial în interiorul tronsonului următor de diametru mai mare.

144 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 145

146 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 147

148 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 149

150 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 151

152 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 153
În acest fel în poziţia închisă tronsoanele pătrund unul în interiorul celuilaltrezultând un gabarit axial minim, iar în poziţia deschisă se realizează olungime totală maximă prin ieşirea, unul din celălalt a tronsoanelor.
Cricul se numeşte “cu dublă acţiune” dacă ridicarea sau coborâreacelor două şuruburi se face simultan astfel încât la o rotaţie completă de360o a mecanismului de acţionare (roată de clichet etc.) sarcina să poată fideplasată pe o distanţă l = p1 + p2 (p1 fiind pasul şurubului principal, iar p2 –pasul şurubului secundar). Pentru realizarea acestei deplasări se impune casensul de înclinare a elicei celor două şuruburi să fie diferit, adică “dreapta -stânga” în caz contrar cricul nu mai funcţionează cu dublă acţiune, ci devineaşa-numitul cric “diferenţial” la care l = p1 – p2, soluţie utilizată în cazulunor sarcini foarte mari şi când există necesitatea unor deplasări lente.
Principalele părţi componente a acestor tipuri de cricuri se potexemplifica prin analiza variantei constructive din fig. 4.8 şi anume: şurubulprincipal (1), şurubul secundar (2), piuliţa (3), corpul (4), cupa (8), ştiftul defixare a cupei (16), limitatoarele de cursă (13) şi (14), şuruburile de fixare(19), respectiv (21), mecanismul de acţionare cu clichet care cuprinde roatade clichet (5), clichetul (9), bolţul clichetului (10), şaiba (17), ştiftul (18),placa suport (6), tija (11), prelungitorul (12), inelul de fixare (7) şi ştifturile(15).
Funcţionarea cricului telescopic simplu rezultă din fig. 4.7. Mişcareade rotaţie imprimată de clichetul (10), roţii de clichet (9), este transmisă roţiidinţate conice (8) care la rândul său o transmite prin angrenare, roţii dinţateconice (5), aceasta fiind în acelaşi timp şi piuliţă pentru şurubul secundar(4). Asamblarea între roata de clichet şi roata dinţată se poate face pe uncontur poligonal ca în cazul de faţă, sau prin pene, caneluri etc. Deplasareaaxială a celor două şuruburi se face succesiv, în prima fază, deplasându-seşurubul principal (3), şurubul secundar (4) executând o mişcare de rotaţieîmpreună cu piuliţa datorită momentului de frecare dintre spire. Şurubulprincipal nu se poate roti fiind solidarizat de cupa (1) prin ştiftul (2), cupafiind împiedicată să se rotească de sarcină. La terminarea cursei şurubuluiprincipal (când cepul de ghidare al acestuia ajunge la porţiunea filetată aşurubului secundar) şurubul secundar este împiedicat să se mai rotească,executând în continuare o mişcare de translaţie datorită mişcării relativedintre acesta şi piuliţă. La coborâre pârghia de acţionare împreună cu roatade clichet şi clichet se scoate, se roteşte cu 1800, se introduce la loc,permiţând în acest caz acţionarea în sens invers. Ridicarea sau coborâreacupei se poate face de la mecanismul de acţionare numai atunci când sarcinaeste pe cupă, împiedicând rotirea acesteia. Când sarcina nu este pe cupă,ridicarea sau coborârea acesteia se face rotind cu mâna şurubul principalprin intermediul cupei.

154 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Funcţionarea cricului cu dublă acţiune (fig. 4.8) se bazează pemişcările relative existente între principalele elemente ale cricului: şurubulprincipal (1), şurubul secundar (2) şi piuliţa (3). Şurubul principal, fiindfixat de cupa (8) prin intermediul ştiftului (16), poate să execute numai omişcare de translaţie pe verticală (când sarcina este aşezată pe cupă şiîmpiedică cupa să se rotească). Şurubul secundar poate executa o mişcare derotaţie şi o mişcare de translaţie. Având în vedere cupla cinematică de clasaa V-a existentă între şurubul secundar şi piuliţa fixă din corp, rotind prinintermediul roţii de clichet şurubul secundar, acesta va executa mişcarea deroto-translaţie, între cele două mişcări existând relaţia cinematică delegătură dată de geometria filetului. Datorită existenţei mişcării relative întreşurubul principal şi şurubul secundar, şurubul principal este obligat să sedeplaseze. La o rotaţie completă de 3600 a şurubului secundar cupaîmpreună cu sarcina se va deplasa pe o distanţă egală cu suma paşilor celordouă şuruburi. Cricul funcţionează cu dublă acţiune numai atâta timp câtsarcina se găseşte pe cupă şi o împiedică pe aceasta să se rotească,apropierea cupei de sarcină putându-se face fie prin rotirea cu mâna aşurubului principal fie acţionând asupra mecanismului de acţionare şiridicând în acest caz şurubul secundar.
Variantele constructive ale acestor cricuri se pot diferenţia din punctde vedere constructiv, tehnologic şi funcţional ţinând seama de tipulmecanismului de acţionare, forma corpului, forma piuliţelor, forma cupeietc.
Variantele constructive prezentate în fig. 4.7– 4.12 sunt următoarele:- cric telescopic cu mecanism de acţionare cu clichet şi roţi conice
(fig. 4.7);- cric telescopic cu dublă acţiune cu mecanism de acţionare cu
clichet vertical (fig. 4.8, 4.9 şi 4.12);- cric telescopic cu dublă acţiune cu mecanism de acţionare cu
clichet orizontal (fig. 4.10);- cric telescopic cu dublă acţiune având ca element de acţionare
pârghia (10) (fig. 4.11).Particularitatea soluţiei constructive din figura 4.11 constă în
acţionarea corpului (3) împreună cu piuliţele (1) şi (5) ca urmare aintroducerii succesive a pârghiei (10) în găurile practicate în acest scop încorpul (3). Piuliţele (1) şi (5) sunt fixate cu şuruburi de corpul (3). Prinrotirea corpului acesta se va ridica pe şurubul (4) care este fixat pe placa debază a cricului. Piuliţa (5) legată şi ea de corpul (3) va provoca prin rotire,deplasarea axială a şurubului (2) fixat solidar cu cupa (9) prin ştiftul (8) şiîmpiedicat să se rotească de sarcina aflată pe cupă. În acest fel, se produce

Capitolul 4. Soluţii constructive 155
ridicarea simultană a corpului pe şurubul secundar şi a şurubului principalfaţă de corp.
Varianta constructivă din fig. 4.12 asigură dubla acţiune prinşuruburile (3) şi (8) şi a piuliţelor (9) care se rotesc împreună cu corpul (4)acţionat de mecanismul cu clichet vertical.
Ca mecanisme de acţionare se pot folosi mecanismele de acţionarecu clichet cu avantajul unei manevrări uşoare şi rapide (fig. 4.7, 4.8, 4.9,4.10 şi 4.12) sau pârghii simple (fig. 4.11).
Mecanismele de acţionare cu clichet se pot diferenţia în douăcategorii: cu clichet orizontal (fig. 4.10) şi cu clichet vertical (fig. 4.7, 4.8,4.9 şi 4.12).
Clichetul orizontal (fig. 4.10) funcţionează, executând mişcărioscilatorii în jurul bolţului (11) într-un plan orizontal (perpendicular peaxele şuruburilor) mişcări care permit clichetului să iasă şi să intre îngolurile roţii de clichet în fazele de revenire. Menţinerea clichetului în golulroţii de clichet o face împingătorul (12) împreună cu arcul (13), forţa din arcputându-se regla cu ajutorul ştiftului filetat cu crestătură (14).
Pentru inversarea sensului de mişcare se apasă cu mâna pe pârghialiberă a clichetului rotindu-l prin comprimarea arcului şi retragereaîmpingătorului. La revenirea arcului, împingătorul face contact cu clichetulpe alte suprafeţe, momentul de rotire dat de forţa din arc având în acest cazsens contrar celui precedent menţinând de data aceasta celălalt braţ alpârghiei clichetului în contact cu roata de clichet. Clichetul verticalfuncţionează executând mişcări oscilatorii în jurul bolţului într-un planvertical.
Menţinerea clichetului în golurile roţii de clichet se face sub acţiuneagreutăţii proprii. Schimbarea sensului de acţionare se face rotind clichetul înjurul bolţului cu mâna, cu 1800.
În fig. 4.7 este prezentată o variantă de clichet la care menţinereaclichetului în golurile roţii se face cu ajutorul arcului lamelar (12). La acesttip de mecanism poziţia clichetului faţă de roata de clichet este tot timpulaceeaşi, schimbarea sensului de acţionare făcându-se prin schimbareapoziţiei întregului mecanism.
Acest sistem de acţionare mai prezintă particularitatea schimbăriiplanului de acţionare a forţei de acţionare prin utilizarea unui angrenaj curoţi dinţate conice, fapt ce constituie un avantaj din punct de vedereergonomic şi al productivităţii.
Construcţia corpului cricului poate să fie diferită de la o variantă laalta, funcţie de seria de fabricaţie şi posibilităţile tehnologice existente. Încazul unor serii mari de fabricaţie şi forme mai complicate corpul cricului sepoate face prin turnare (fig. 4.7 şi 4.8), iar în cazul unor unicate sau serii

156 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
mici corpul poate fi o construcţie sudată (fig. 4.9 şi 4.10) sau obţinut dinlaminate prelucrate pe maşini-unelte (fig. 4.11 şi 4.12).
Piuliţele pot avea forme diferite, putând fi construite ca pieseseparate sau corp comun cu alte piese ca de exemplu: împreună cu roatadinţată conică (fig. 4.7), împreună cu corpul (fig. 4.9).
Modul de fixare şi centrare a piuliţei pe corp poate de asemenea sădifere, fixarea putându-se face cu ajutorul unor şuruburi sau ştifturi filetate(fig. 4.8, 4.10, 4.11 şi 4.12), prin sudare (fig. 4.9) sau utilizând asamblări custrângere.
Cupa cricului ca şi piuliţele pot fi realizate ca piese distincte fixatepe capătul şurubului cu ajutorul ştifturilor cilindrice sau conice (fig. 4.7, 4.8,4.10 şi 4.11), prin sudare (fig. 4.9) sau corp comun cu şurubul (fig. 4.12).
Fixarea roţii de clichet pe piesa pe care o pune în mişcare de rotaţiese poate face pe contur poligonal pătrat sau hexagon (fig. 4.7, 4.8 şi 4.12),prin sudare (fig. 4.9), cu pană (fig. 4.10).
În cazul existenţei unor suprafeţe în contact între care există mişcarerelativă de alunecare şi presiuni de contact mari se recomandă utilizareaunor rulmenţi axiali care micşorează pierderile prin frecare, elimină uzurapieselor în contact şi îmbunătăţesc randamentul cricului (fig. 4.7).
4.1.4. Cricuri cu pârghii.Cricul cu pârghii cu o singură piuliţă (tip Dacia) este prezentat în fig.
4.13, iar cricul cu pârghii cu două piuliţe în fig. 4.14. Principalele elementecomponente ale acestor tipuri de cricuri sunt: şurubul (1), piuliţa (2) şilagărul cilindric (3) – la cricul cu o piuliţă, respectiv piuliţele (2) şi (3) – lacricul cu două piuliţe, pârghiile (4) – în număr de opt, cupa (5), suportulcupei (6), placa de bază (13), respectiv (12) şi mecanismul de acţionare.
La cricul cu o piuliţă (fig. 4.13), la care patru pârghii sunt articulatela bolţurile piuliţei (2) şi celelalte patru la bolţurile lagărului cilindric (3), lao rotaţie completă a şurubului (1), piuliţa (2) se apropie de lagărul (3) cu unpas al filetului, realizând o înălţime de ridicare ce depinde şi de lungimeapârghiilor.
La cricul cu două piuliţe (fig. 4.14), la care patru pârghii suntarticulate cu piuliţa (2) şi celelalte patru cu piuliţa (3), la o rotaţie completăa şurubului, cele două piuliţe se apropie cu doi paşi ai filetului, înălţimea deridicare fiind funcţie şi de lungimea pârghiilor.
Pentru realizarea acestui mod de funcţionare, cele două porţiuni alefiletului care formează cuple elicoidale cu piuliţele (2) şi (3) vor avea acelaşifilet, dar cu sensuri diferite de înfăşurare a spirelor, una filetată dreapta şicealaltă filetată stânga.

Capitolul 4. Soluţii constructive 157

158 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 159
4.1.5. Presă cu piuliţă fixă.Presa, având batiu cu consolă, este prezentată în fig. 4.15. Batiul (1)
are o formă deschisă. La partea inferioară are o suprafaţă plană pe care seaşează accesoriile în care se reazemă piesa asupra căreia se acţionează. Deasemenea, talpa este prevăzută cu găuri pentru fixarea piesei pe postament.Se observă că talpa presei este scobită, pentru a se asigura o poziţionare maiprecisă a presei.
La partea superioară batiul are o consolă în care se montează piuliţafixă (12). La acest tip de presă se recomandă montarea piuliţei cu un ajustajintermediar cu strângere mică (de exemplu ajustaj de tip H/k). Dacă s-arprevedea un ajustaj cu strângere montarea ar fi dificilă din cauza accesuluiincomod la piuliţă în vederea presării ei. Piuliţa se asigură împotriva rotiriicu asamblările şurub (9) – piuliţă (10) (cu 11 s-a notat şaiba pe care sereazemă piuliţa). Porţiunea verticală a batiului are o secţiune I.
Şurubul de forţă (8) este acţionat de la roata de mână (15). Aceastaare braţele sudate de butuc, iar la capetele acestora se montează bilele (16).Roata de manevră este calată pe o porţiune de secţiune pătrată şi este fixatăcu piuliţa (13) şi şaiba (14).
Şurubul este rezemat axial în berbecul (4). La ridicare, şurubulacţionează asupra celor două plăci (7) fixate pe berbec cu şuruburile (5) şişaibele (6), ridicând berbecul. Berbecul este ghidat în ghidajul (22). Acestaeste fixat pe batiu prin şuruburile (17) şi şaibele (18). Jocul în ghidaj sereglează cu ştifturile filetate (19) care acţionează pana de compensare (21).Asigurarea ştifturilor în poziţia dorită este realizată cu piuliţele (20).
La partea inferioară a berbecului se montează un element deacţionare (poanson) schimbabil, menţinerea acestuia în alezajul berbeculuifiind realizată cu şurubul (3). Este mai avantajos ca poansonul să aibă cepnefiletat, deoarece filetul s-ar putea deteriora în cazul unei montări greşite apoansonului.
Presa cu corp din profil laminat este prezentată în fig. 4.16.Pentru varianta de presă cu piuliţă fixă prezentată în fig. 4.16 este
caracteristică construcţia batiului (9) din profil laminat U îndoit şi sudat înformă de cadru. Batiul este asamblat cu masa presei (10) prin intermediulşuruburilor (11), asigurate cu şaibele Grower (12). Masa presei esteprevăzută la partea superioară cu canale T necesare fixării unor dispozitivefolosite la presare, iar la partea inferioară cu locaşuri pentru şuruburile defixare a presei pe fundaţie sau postament. Piuliţa fixă (5) se montează înalezajul din partea superioară a batiului cu şuruburile (6) şi piuliţele (7)asigurate cu şaibe Grower (8). Pe şurubul de forţă (4) este montată manivela(3) de construcţie sudată.

160 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 161

162 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Asamblarea şurub de forţă-manivelă este cu profil pătrat în secţiunetransversală, fixarea împotriva demontării făcându-se cu piuliţa înfundată(1) şi şaiba plată (2).
Presa cu coloane este prezentată în fig. 4.17. Denumirea acesteivariante de presă cu piuliţă fixă (fig. 4.17) derivă din prezenţa coloanelor(11) în construcţia batiului presei. Coloanele sunt filetate la ambele capete,astfel încât ele realizează legătura între masa presei (16) şi traversa fixă (4),cu ajutorul piuliţelor înfundate (9) şi a şaibelor (10). Masa presei are oformă circulară fiind prevăzută cu canale T la partea superioară, cu locaşuripentru şuruburile de fixare pe fundaţie şi cu clemă, alezaje filetate în care seînşurubează coloanele. În traversa fixă se montează piuliţa (2) cu ajutorulşuruburilor (3) în cazul în care ajustajul format este cu strângere mică (deexemplu H/k) sau fără şuruburi dacă se formează un ajustaj cu strângeremare. Pe şurubul de forţă (1) se montează roata de mână (5) prin intermediulunei asamblări prin formă, de secţiune pătrată, fixarea făcându-se cu piuliţaînfundată (8). Roata de mână este de construcţie turnată, cu patru braţeprevăzute cu greutăţi la capetele lor în vederea antrenării inerţiale în sarcinăa şurubului de forţă. Ca o măsură de protecţia muncii se fixează pe roata demână un inel (7) din tablă montat cu ajutorul şuruburilor (6).
La partea inferioară a şurubului de forţă se montează traversa mobilă(15) care se ghidează pe coloane. Pentru micşorarea momentului de frecarela presare între capul şurubului de forţă şi traversa mobilă se monteazărulmentul axial (14).
4.1.6. Prese cu piuliţă rotitoare.În general, presele cu şurub cu acţionare manuală se utilizează în
atelierele mecanice, pentru montarea sau demontarea unor îmbinări presatede dimensiuni reduse şi medii, pentru ambutisarea sau ştanţarea unor piesede dimensiuni reduse care se execută într-un număr restrâns de bucăţi.
Presele cu piuliţă rotitoare au avantajul că şurubul, executând numaimişcare de translaţie, poate veni în contact direct cu piesa care se presează.
Presa cu piuliţă rotitoare, prezentată în fig. 4.18, este alcătuită dincorpul presei (1) executat prin turnare din fontă cenuşie sau oţel, şurubulprincipal (2), acţionând în consolă. Din acest motiv coloana trebuie să fiebine dimensionată, ea fiind solicitată la încovoiere şi tracţiune. Aşa cumrezultă din schiţă, în secţiune transversală coloana are un profil “T”. Şurubulde mişcare (2) execută numai mişcare de translaţie fiind împiedicat să serotească datorită fixării cu pană paralelă. Pana paralelă este fixată în şurubulde mişcare cu şuruburile (13), deplasându-se în canalul din capacul fix (4)care este montat pe corpul presei cu ajutorul şuruburilor (5). Piuliţa rotitoare

Capitolul 4. Soluţii constructive 163

164 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 165
(7), executată din bronz sau fontă este centrată în corpul presei şi se sprijinăaxial pe rulmentul axial cu bile (8) care preia sarcina axială ce apare în tijaşurubului în timpul presării. Rulmentul axial (8) are rolul de a înlocuifrecarea de alunecare ce ar apare între piuliţă şi piesa de reazem cu frecareade rostogolire la care pierderile prin frecare sunt mult mai reduse. Piuliţaeste acţionată în mişcarea sa de rotaţie de către butucul cu manetele (9),fixarea împotriva rotirii piuliţei faţă de butuc realizându-se prin panaparalelă (11). Pentru ca butucul să nu iasă de pe piuliţa rotitoare, este fixatcu piuliţa cu caneluri (12).
Pentru a se reduce frecările dintre spirele filetului şi ale piuliţei,dintre piuliţă şi corpul presei şi dintre elementele ce alcătuiesc rulmentulaxial, aceste zone se ung cu unsori consistente corespunzătoare.
În fig. 4.19 este prezentată presa cu piuliţă rotitoare cu douăcoloane. Masa (1) se execută prin turnare din fontă. Cele două coloane (2)care susţin traversa fixă (6) au secţiunea plină şi se execută din oţel carbonde construcţie (din semifabricate laminate). Şurubul de mişcare (3) este fixatîmpotriva rotirii în traversă mobilă (15) cu ajutorul unui ştift (16) care semontează cu ajustaj intermediar în capătul şurubului şi cu joc în alezajul dintraversa mobilă (15). Traversa fixă (6) executată prin turnare din fontă sauoţel, se montează pe capetele celor două coloane cu ajustaj intermediar(strângere mică) şi se fixează cu ajutorul piuliţelor (8).
Piuliţa rotitoare (13), executată din fontă sau bronz, este acţionată demanetele (10) care, prin intermediul butucului şi a penei paralele (12),imprimă piuliţei mişcarea de rotaţie. Piuliţa este fixată în sens radial încoloana fixă (6) (frecare de alunecare) iar în sens axial se sprijină perulmentul axial cu bile (14) (frecare de rostogolire).
Considerând construcţia asimetrică, faţă de axa de rotaţie a şurubuluide mişcare, cele două coloane (2) sunt egal încărcate (fiecare cu jumătatedin forţa ce acţionează în şurub). În cazul acestei construcţii secţiuneaşurubului nu este slăbită prin practicarea canalului de pană, încărcarea estemai uniformă, execuţia este mai simplă. Dezavantajul constă în faptul căpiesele care se presează sau se decupează (prin ştanţare) etc. trebuie să intreîntre cele două coloane.
Presa cu piuliţă rotitoare prezentată în fig. 4.20 este o construcţie cese montează pe masa muncitorului lăcătuş şi se utilizează în special pentrumontarea şi demontarea unor piese de dimensiuni reduse ce formeazăajustaje cu strângere.
Această presă este alcătuită dintr-o masă (1) ce se execută printurnare din oţel (sau din elemente sudate). Cu masa (1) face corp comun obrăţară elastică în care se fixează coloana cilindrică (executată din ţeavă) cese sudează de placa (7) alcătuind astfel o parte din corpul presei.

166 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 167

168 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Coloana împreună cu placa (7) – corpul presei – se poate deplasa însens axial reglând poziţia capătului şurubului de mişcare (2) în funcţie deînălţimile pieselor ce intervin în operaţiile ce se execută.
Această reglare se face strângând sau desfăcând brăţara elastică cuajutorul şurubului (15). Piuliţa rotitoare (9) este la fel fixată şi poziţionată caşi în cazul celorlalte două variante constructive. În cazul de faţă, şurubul demişcare (2) este asigurat împotriva rotirii de o pană specială (4) fixată încapacul (5) cu ajutorul şurubului (3). În timp ce şurubul se deplasează axial,pana (4) culisează în canalul de pană practicat în şurub. Soluţia constructivăoferă avantajul reglării înălţimii de presare în funcţie de mărimea pieselor şila o lungime relativ redusă a şurubului de mişcare (2).
4.1.7. Dispozitive cu şurub pentru montarea şi demontarearulmenţilor.
În fig. 4.21 este prezentată construcţia unei prese cu şurub pentrumontarea rulmenţilor, iar în fig. 4.22 construcţia unui extractor cu şurubpentru demontarea rulmenţilor.
În fig. 4.23 este prezentatextractorul cu şurub pentru lagărele
cu rulmenţi de dimensiuni reduse. Extractorul se compune din paharul (3)având pe o parte o decupare pentru montarea lui pe ax, şurubul (1) care esteacţionat în mişcare de rotaţie de pârghia (2) şi şaibele de prindere (4). Pentrudepresarea rulmenţilor de diferite dimensiuni este necesar să existe un set deşaibe de acest fel.
Fig. 4.21
Fig. 4.22

Capitolul 4. Soluţii constructive 169
4.1.8. Transmisii cu şurub-piuliţă la maşinile de încercat latracţiune-compresiune.
În fig. 4.24 este prezentatăschema de principiu a maşiniiuniversale de încercare la tracţiune-compresiune la care încercarea seefectuează prin intermediul uneitransmisii cu şurub-piuliţă.
Pregătirea ansamblului deîncercat se realizează cu ajutorulşurubului de poziţionare (3), care esteantrenat în mişcare de rotaţie de cătreroata de manevră (1). Şurubul (3)deplasează în sus sau în jos piuliţapatină (2).
Solicitarea de tracţiune sau compresiune a epruvetei se realizeazăprin deplasarea pe verticală a platformei de fixare a epruvetei cu ajutorulşurubului de încercare (4) care primeşte mişcarea de la piuliţa executată înbutucul roţii melcate a reductorului (5). Melcul este acţionat printr-otransmisie cu roţi dinţate cilindrice (7) de către roata de manevră (6).
În fig. 4.25 este prezentată în detaliu transmisia cu şurub utilizată înconstrucţia maşinilor de încercat la tracţiune-compresiune.
Roata melcată, care primeşte mişcarea de la melc, pune în mişcarede rotaţie piuliţa care produce translaţia şurubului transmiţând sarcina axială(compresiune-tracţiune) epruvetei care se încearcă.
4.1.9. Transmisii cu şurub pentru elevatoare.În fig. 4.26 este prezentat un elevator pentru deplasarea unei oale de
turnare.Acţionarea elevatorului pentru deplasarea oalei cu metal topit, în
timpul umplerii formelor de turnare, este prezentată în fig. 4.27.Acţionarea se compune dintr-un motor electric cu flanşă (1), o
transmisie cu roţi dinţate cu o singură treaptă (3, 4) şi transmisia şurub-piuliţă (6, 8). Roata dinţată (4) este asamblată cu piuliţa (6) printr-oîmbinare cu pană paralelă. Oala cu metal lichid, cu ajutorul unei traverse,este suspendată pe capul (10) al şurubului prin intermediul lagărului axial(9). Ridicarea şi coborârea oalei se efectuează de către piuliţa (6), pusă înmişcare de rotaţie de către roata dinţată (4). Poziţiile extreme sunt asiguratede întrerupătoare-limitatoare de cursă.
Fig. 4.23

170 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 171

172 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 4. Soluţii constructive 173

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI174
4.2. SOLUŢII CONSTRUCTIVE DE MECANISMECU ŞURUBURI CU MIŞCARE DE ROSTOGOLIRE(ŞURUBURI CU BILE)
Randamentul mecanismului cu şurub cu bile depinde într-o oarecaremăsură de schema cinematică a mecanismului. Astfel, în fig. 4.28 suntreprezentate tipurile de bază ale schemelor constructive ale mecanismului cuşurub.
La tipul din fig. 4.28 a, datorită contactului dintre şurub, bile şipiuliţă, pe o suprafaţă mare, pierderile prin frecare sunt ridicate.
Randamentul acestormecanisme nu depăşeşte85%. Totuşi, mecanismeleprezintă o mare simplitate,în privinţa pieselorcomponente şi o uşurinţăde execuţie, de aceea sepretează la producţia înserie mare. Printredezavantajele acestui tip semenţionează precizia micăîn ceea ce priveşte cursaiar, din cauza jocurilormari dintre piese, greutatemare, de unde rezultă forţede inerţie mari.
În varianta din fig. 4.28 b, piuliţa este îmbinată rigid cu o carcasă înformă de ţeavă, în care la un capăt se montează role. Mecanismul are unrandament ridicat (până la 92%) şi este mai uşor decât cel precedent.Dezavantajul constă în aceea că, mecanismul are o cursă destul de mică. Dinaceastă cauză se utilizează la mecanismele cu cursa şurubului (sau a piuliţei)mică. Mecanismul nu se pretează la producţia în serie.
La varianta din fig. 4.28 c, piuliţa este executată cu mai multesecţiuni (se utilizează şuruburi a căror piuliţe au până la patru secţiuni).Această soluţie prezintă o mare precizie în ceea ce priveşte cursa şi ogreutate mică, faţă de alte tipuri, la aceeaşi sarcină. Randamentulmecanismului este destul de ridicat (atinge 98%). Din această cauză,piuliţele multisecţionate au o utilizare foarte largă. Printre dezavantajeleacestei variante se menţionează: greutatea, în ceea ce priveşte execuţia,
Fig. 4.28

Capitolul 4. Soluţii constructive 175
complexitatea şi cantitatea mare a pieselor componente, precum şi costulmai ridicat.
În mod practic cursa şurubului (piuliţei) este împiedicată numai decondiţia de flambaj.
În fig. 4.29 sunt arătate diverse tipuri de mecanisme cu şurub cu bile,utilizate în diferite domenii ale tehnicii.
Mecanismul din fig. 4.29 a este folosit la dispozitivele de tălpuirehidromecanice. Tija pistonului este îmbinată cu şurubul (2) prin intermediulunui cuplaj cardanic (3), care permite rotirea acestuia, concomitent cumişcarea de deplasare axială. Mişcarea de rotaţie se transmite la piuliţa (1)iar de aici mai departe, prin intermediul pinionului (5). Rulmentul (4) preiaforţele axiale şi împiedică mişcarea de translaţie a piuliţei. Mecanismulprezintă pierderi mici prin frecare, fie că acţionarea se face prin piston, fieprin pinion.
În fig. 4.29 b este reprezentată schema mecanismului de închidere aşuberului. Mişcarea se transmite de la motorul electric reversibil (5), prinintermediul cuplajului (4), la şurubul (2). Deoarece acesta execută numaimişcare de rotaţie, piuliţa se va deplasa la dreapta sau la stânga, în funcţie desensul de rotaţie a şurubului. Piuliţa este legată de şuberul (7) prinintermediul tijelor (6), astfel încât deplasarea piuliţei asigură închiderea şideschiderea şuberului. Mişcarea de translaţie a şurubului este împiedicată delagărul axial (3).
La dispozitivul pentru comanda unei şalupe se foloseşte mecanismuldin fig. 4.29 c. De la roata cu lanţ (2), mişcarea se transmite, prinintermediul cuplajului cardanic (3), la carcasa de protecţie (4), legată rigidcu piuliţa (5). Prin rotirea piuliţei, şurubul (6) se deplasează la dreapta sau lastânga şi prin aceasta deplasează tija cârmei (7). Deplasarea axială a piuliţeieste împiedicată de rulmenţii (1).
Varianta din fig. 4.29 d reprezintă mecanismul de direcţie al unuiautomobil. Prin rotirea volanului (1), mişcarea se transmite şurubului (5), deaici piuliţei (4), iar prin intermediul penei (3), la roata dinţată (6), caretransmite mişcarea sectorului dinţat (7), montat pe arborele de direcţie.Rulmenţii (2) împiedică mişcarea de translaţie a şurubului. Întregulmecanism este închis într-o carcasă de fontă (8).
În fig. 4.29 e este reprezentat mecanismul pentru ridicarea şi lansarearoţilor şasiului de la avion. Şurubul (3) primeşte mişcarea de rotaţie de lamotorul electric (6), prin intermediul unui cuplaj (5). În funcţie de sensul derotaţie a şurubului, piuliţa (2) se deplasează la stânga sau la dreapta,acţionând tija (1) de comandă a roţilor. Deplasarea axială a şurubului esteîmpiedicată de rulmenţii (4).

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI176

Capitolul 4. Soluţii constructive 177
După cum se ştie, în cazurile în care se cere condiţia de autofrânare , randamentul mecanismului cu şurub devine foarte mic
( 35,03,0 ); de aceea au fost realizate construcţii la care frecarea semicşorează mult în timpul mişcării. Un astfel de mecanism este arătat în fig.4.30.
Mişcarea de rotaţie a şurubului (2), se transmite piuliţei (3), care estefiletată atât în interior cât şi în exterior. În interior, între spirele piuliţei şi aleşurubului, există bile iar în exterior, între spirele piuliţei şi carcasei (1), filetdreptunghiular obişnuit. Şurubul execută numai o mişcare de rotaţie, iarpiuliţa o mişcare de rotaţie şi translaţie. Direcţia celor două filete estediferită, iar filetul exterior îndeplineşte condiţia de autofrânare. Aceastăcondiţie va fi asigurată numai în direcţia în care permite rotire filetulexterior. În rest transmiterea mişcării se face numai prin intermediul bilelor,deci cu frecări mult mai mici. Întreg mecanismul este montat pe rulmenţiiradiali-axiali (4).
Există unele mecanisme care lucrează cu strângere, în sensul că întrespirele piuliţei şi ale şurubului nu rămâne nici un fel de joc axial. Un astfel
de dispozitiv devine mai rigid şilucrează foarte bine în condiţiileîn care forţele sau momenteleacţionează prin impulsuri;totodată cere mai puţină îngrijire.
Schema unui astfel demecanism este arătată în fig.4.31. Piuliţa este compusă dindouă bucăţi, strânse între ele prinintermediul flanşelor (1) şi (2) şia şuruburilor de strângere (3).Fiecare jumătate de piuliţă esteprevăzută cu câte un canal 4 (sub
formă tubulară), pentru readucerea bilelor. Aşezarea bilelor după strângere
Fig. 4.30
Fig. 4.31

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI178
este arătată în fig. 4.32. Randamentul unui astfel de dispozitiv nu depăşeşte95%.
Unele soluţii constructive aucanalul de readucere în corpul tijeimecanismului (fig. 4.33). Capătultijei (1) serveşte drept şurub, iar piesa(2) drept piuliţă. Canalul dereaducere (3) este executat chiar încorpul tijei. Piuliţa frontală (4)
serveşte la asigurarea etanşeităţii şi în acelaşi timp la limitarea cursei şicapetele (5), prevăzute cu rulmenţi, servesc la fixare.
Dispozitivul descris este o construcţie compactă pe diametru şiprezintă o bună etanşare. Ca dezavantaje se menţionează: dificultate în ceeace priveşte executarea canalelor cu mai multe începuturi, deci mai multespire lucrătoare şi o inerţie mai mare a mecanismului.
Fig. 4.32
Fig. 4.33

CAPITOLUL 5
CALCULUL ASAMBLĂRILOR CU FLANŞE
5.1. GENERALITĂŢIExistă mai multe metode pentru calculul asamblărilor cu flanşe.
Toate acestea sunt de fapt metode de verificare şi nu de dimensionarepropriu-zisă. Mai cunoscute sunt: metoda ASME (SUA), metoda AD-M(Germania), metoda de calcul la sarcini limită (Rusia).
Metoda ASME [30, 34] se bazează pe un bogat materialexperimental şi permite determinarea separată a tensiunilor inelare,meridionale şi radiale. Calculele sunt în acest caz uşurate de existenţagraficelor, pe baza cărora se determină unii factori din relaţiile de calcul.
Studii recente au arătat că rezultatele obţinute prin cele trei metodesunt apropiate.
Metoda ASME este aplicată atât pentru materiale cu domeniu deplasticitate, cât şi pentru cele casante, deoarece, în final, starea de tensiunidin flanşă se compară cu o stare limită, inferioară limitei de curgere.
Deoarece această metodă acoperă în întregime domeniul dedimensiuni care interesează, în general, în construcţia recipientelor sub
Fig.5.1. Flanşe de tip integral din punctul de vedere al calculului de rezistenţă.

180 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
presiune, a fost adoptată în mai multe ţări (Anglia, Rusia, România, etc.).În vederea calculului, flanşele sunt împărţite în trei grupe: flanşe de
tip integral (fig. 5.1), flanşe de tip liber (fig. 5.2) şi flanşe de tip opţional(fig. 5.3).
a) Flanşele de tip integral sunt flanşele (rigide) a căror construcţiegarantează solicitarea simultană şi în aceiaşi măsură a ţevii (sau virolei) şi aflanşei. În această categorie intră flanşele care fac corp comun cu corpulaparatului (turnate, forjate) (fig. 5.1, a, b), flanşele plate cu sudură adâncă(pe toată grosimea flanşei) (fig. 5.1 c).
b) Flanşele de tip liber sunt flanşele îmbinate cu ţeava sau cu virolaastfel încât nu este asigurată solicitarea simultană a ţevii (sau virolei) şi aflanşei. În această grupă intră flanşele libere aplicate pe ţeava răsfrântă (fig.5.2 a), flanşele cu filet (pentru presiuni mici şi medii) (fig. 5.2 b), flanşelemandrinate şi flanşele sudate fără sudură adâncă (fig. 5.2 c).
c) Flanşele de tip opţional (fig. 5.3) determină prin construcţienumai parţial solicitarea ţevii sau a virolei cu care se îmbină. Din acestmotiv, aceste flanşe pot fi calculate fie ca flanşe de tip liber, fie ca flanşe detip integral.
Fig.5.2. Flanşe de tip liber din punctul de vedere al calculului de rezistenţă.
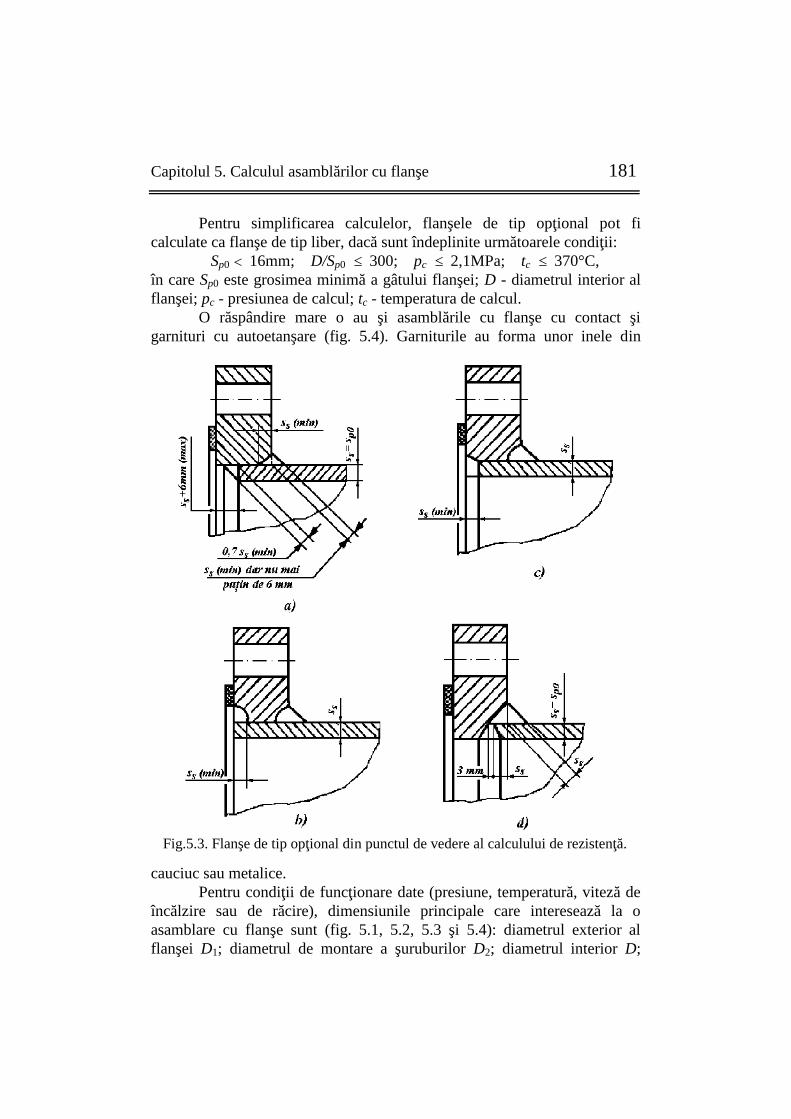
Capitolul 5. Calculul asamblărilor cu flanşe 181
Pentru simplificarea calculelor, flanşele de tip opţional pot ficalculate ca flanşe de tip liber, dacă sunt îndeplinite următoarele condiţii:
Sp0 16mm; D/Sp0 300; pc 2,1MPa; tc 370°C,în care Sp0 este grosimea minimă a gâtului flanşei; D - diametrul interior alflanşei; pc - presiunea de calcul; tc - temperatura de calcul.
O răspândire mare o au şi asamblările cu flanşe cu contact şigarnituri cu autoetanşare (fig. 5.4). Garniturile au forma unor inele din
cauciuc sau metalice.Pentru condiţii de funcţionare date (presiune, temperatură, viteză de
încălzire sau de răcire), dimensiunile principale care interesează la oasamblare cu flanşe sunt (fig. 5.1, 5.2, 5.3 şi 5.4): diametrul exterior alflanşei D1; diametrul de montare a şuruburilor D2; diametrul interior D;
Fig.5.3. Flanşe de tip opţional din punctul de vedere al calculului de rezistenţă.

182 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
lăţimea suprafeţei de strângere a garniturii B0; numărul z şi diametrul ds alşuruburilor; grosimea h a talerului flanşei şi dimensiunile garniturii hg , B şiD3.
5.2. CALCULUL SIMPLIFICAT AL ASAMBLĂRILOR CUFLANŞE.
Calculul se efectuează cu alegerea preliminară a dimensiunilor,urmată de verificarea de rezistenţă a elementelor asamblării cu flanşe.
Fig.5.5. Schema de calcul a asamblărilor cu flanşefără contact integrale (a) şi libere (b).
Fig.5.4. Asamblare cu flanşe cu contact şi garnitură cu autoetanşare.

Capitolul 5. Calculul asamblărilor cu flanşe 183
5.2.1. Calculul asamblării cu flanşe tip integral fără contact.
Forţa de calcul, ce acţionează pe şurub (fig. 5.5, a) se determină curelaţia:
cs pD
kP4
23
, N (5.1)
unde:D3 - diametrul mediu al garniturii, mm;pc - presiunea mediului de lucru (presiunea de calcul), MPa;k - coeficient de strângere. Funcţie de tipul garniturii, coeficientul de
strângere are valorile:- Garnituri moi ……….……….................. k = 1,5 - 2,5- Garnituri moi în înveliş metalic şi garnituri
metalice fasonate ……………………... k = 2,5 - 3,5- Garnituri metalice plate ………………... k = 3,0 - 4,5
Condiţia de rezistenţă a şuruburilor flanşelor este:tc
sts dz
P
6,0
42
1
(5.2)
unde: z - numărul de şuruburi;d1 - diametrul interior al filetului şurubului, mm;c
t - limita de curgere a materialului şuruburilor la temperatura de
lucru, MPa.Secţiunea periculoasă în calculul de rezistenţă a flanşei apare, de
obicei, în zona de trecere de la flanşă la ţeavă (secţiunea AB - fig. 5.5 a).Momentul de încovoiere, pe unitatea de lungime, în această secţiune
este:
4D
aPM Ds
i , N mm/mm (5.3)
unde: 1 - coeficient, care ia în considerare ce parte din moment conducela deformarea flanşei prin rotire în încastrare;
Da - distanţa de la centrul secţiunii AB la axa şurubului, mm;
4D - diametrul mediu al ţevii în secţiunea AB, mm.Dacă porţiunea conică (ţeava) este foarte rigidă în comparaţie cu
flanşa şi secţiunea AB nu se roteşte, atunci 1 . Mărimea poate fideterminată cu relaţia aproximativă [3]:

184 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
D
D
r
S
S
h
m
m
m
1
3
lg82,01
1
(5.4)
unde: h - grosimea flanşei, mm;
102
1ppm SSS - grosimea medie a ţevii pe porţiunea conică, mm;
22m
mSD
r - raza medie a ţevii pe porţiunea conică, mm;
D1 şi D - diametrul exterior şi respectiv interior al flanşei, mm.Tensiunea de încovoiere în secţiunea periculoasă a flanşei (secţiunea
AB) este:
tc
pp
Ds
p
ii SSD
aP
S
M
6,066
211
21
(5.5)
unde: tc - limita de curgere a materialului flanşei la temperatura de lucru
(calcul). La temperaturi ridicate (t > 400°C), se va considera rezistenţa dedurată a materialelor.
Din relaţia (5.5) se constată că pentru micşorarea tensiunilor dinflanşe, se poate acţiona:
a) prin apropierea axelor şuruburilor de ţeavă (micşorarea mărimiiaD);
b) prin mărirea grosimii ţevii în locul de trecere către flanşă (Sp1).Totuşi, trebuie avut în vedere că, la conicităţi mari (Ex. K=1:2) se
obţine o consolidare locală sigură, dar maximul tensiunilor se deplaseazăcătre secţiunea mai subţire a ţevii.
5.2.2. Calculul asamblărilor cu flanşe libere fără contact.
Forţa totală pe şurub Ps (fig. 5.5 b) se determină conform relaţiei(5.1). Condiţia de rezistenţă a şuruburilor se exprimă prin relaţia (5.2).
Pentru calculul de rezistenţă al flanşei, se consideră că flanşa estesupusă la o deformare prin rotire în încastrare şi că, în ea, apar tensiunicirculare. Condiţia de rezistenţă a flanşei este:
tc
ii
si
D
DhD
DDP
7,0
ln
)(6
12
42
, MPa (5.6)
unde: D2 - diametrul cercului axelor şuruburilor, mm;

Capitolul 5. Calculul asamblărilor cu flanşe 185
D4 - diametrul mediu al suprafeţei inelare de contact a flanşei cuţeava, mm;
Di - diametru interior al flanşei cu grosimea h, mm;tc - limita de curgere a materialului flanşei la temperatura de lucru a
flanşei.
5.2.3. Calculul asamblării cu flanşe cu contact.
Forţa de calcul totală pentru şuruburile flanşelor (fig. 5.4) sedetermină cu relaţia:
2
2125
4 l
llp
DkP cs
, N (5.7)
unde: k - coeficient de strângere; de obicei se ia k = 1,5 ÷ 2,5;pc - presiunea de lucru a mediului (presiunea de calcul), MPa;
5D - diametrul garniturii (inelului) de etanşare, mm;
l2 - distanţa de la cercul exterior al flanşei la cercul axelorşuruburilor, mm;
l1 - distanţa de la cercul mediu al ţevii la cercul axelor şuruburilor,mm.
Relaţia (5.7) consideră că, în stare limită, închiderea îmbinării seproduce prin rotirea relativă faţă de punctul 01.
Condiţia de rezistenţă a şuruburilor este :
tc
sts dz
P
8,0...6,0
42
1
, MPa (5.8)
unde: z - numărul de şuruburi;d1 - diametrul interior al filetului şuruburilor, mm.Pentru calculul de rezistenţă a flanşei, aceasta se consideră ca o
grindă încastrată în secţiunea AB (fig. 5.4) şi legată elastic cu corpul ţevii.Momentul de încovoiere în secţiunea AB este:
1lFM Di , N mm (5.9)
unde: cD pD
F4
25
- forţa internă ce acţionează în asamblarea cu flanşe;
- coeficient de micşorare a momentului de încovoiere ( 15,0 ),datorită legăturii elastice între flanşă şi ţeavă.
Dacă ţeava este foarte rigidă, în comparaţie cu flanşa, atunci = 0,5,iar pentru ţevi subţiri 1 . Mărimea se poate calcula cu relaţia empirică[3]:

186 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
2
1(5.10)
unde:
t
g
m
pm
D
dzD
S
h
l
Sr
2
3
1
072,0 (5.11)
unde: dg - diametrul găurii pentru şurub, mm;Dt - diametrul mediu al ţevii, mm.Într-un calcul aproximativ se poate lua 1...8,0 .Tensiunea de încovoiere în flanşă, în secţiunea AB, va fi:
tr
g
ii hdzD
M
6,0
62
2
, MPa (5.12)
Momentul de încovoiere în secţiunea LM a ţevii este:
1
25
11 411 lp
DlFM cDi
, N mm (5.13)
Tensiunea de încovoiere în această secţiune trebuie calculată cu:tr
p
ii SD
M
6,0
6214
11 , MPa (5.14)
În relaţiile (5.12) şi (5.14) tr - reprezintă rezistenţa de rupere a
materialului flanşei, cu luarea în considerare a temperaturii şi duratei delucru. În cazul necunoaşterii t
r se poate considera tc , realizând un calcul
acoperitor.
5.3. CALCULUL PRECIS AL ASAMBLĂRILOR CU FLANŞE.
5.3.1. Calculul forţelor de strângere din asamblare.
a) Forţa de strângere iniţială la montaj (T = T0 şi p = p0)
La strângerea iniţială a elementului de etanşare (garniturii) trebuie săse asigure deformarea elastoplastică a acestuia. Prin deformarea sa lamontaj, trebuie să compenseze toate neregularităţile flanşelor îmbinate astfelîncât, în timpul funcţionării, când strângerea acestora scade, să nu se permităscurgerea fluidului din recipient. Forţa pe garnitură este:
gg AqF , N (5.15)
unde: q - presiunea de strivire a garniturii, MPa (1 MPa = 1 N/mm2);Ag - aria garniturii, mm.

Capitolul 5. Calculul asamblărilor cu flanşe 187
La calculul ariei Ag a garniturii, nu se consideră lăţimea reală "B" agarniturii, ci o aşa numită lăţime eficace a garniturii "b", astfel încât:
bDAg 3 , mm (5.16)
Lăţimea "b" depinde de lăţimea de aşezare (strângere) "B0" agarniturii, care este în funcţie de forma şi dimensiunile suprafeţei deetanşare.
Din condiţia ca Ag să fie cât mai mică, garnitura se amplasează îninteriorul cercului de dispunere a şuruburilor ( 2D ). La presiuni mari,atunci când se utilizează garnituri metalice, aria Ag este determinată delăţimea "b0" deformată plastic, în jurul liniei de contact cu suprafaţaflanşelor.
Pentru calculul ariei garniturii Ag, lăţimea eficace a garnituriiBBb 0 se determină în funcţie de valoarea lăţimii de referinţă "b0":
mm.5,6pentru,52,2
mm;5,6pentru,
00
00
bb
bbb (5.17)
în care “b0”, în mm, este funcţie de B, B0, conform tabelului 5.1.Înlocuind (5.16) în relaţia (5.15), se obţine:
qbDFg 3 , N (5.18)
Forţa totală de strângere la montaj ( 0TT şi 0pp ), 0FFg
trebuie să asigure o presiune de strivire distrugeremin qqq în care
mindistrugere qkq g este presiunea de distrugere prin comprimare a
garniturii, iar kg 1,5.Valoarea lui qmin rezultă din tabelul 5.2 pentru diferite materiale şi
tipuri de garnituri de etanşare.b)Forţa de strângere a garniturii în exploatare, când 0TT şi
0pp , are expresia:
eG pbDF 32 , N (5.19)
unde:pe - presiunea de etanşare, ce pmp ;
m - raportul dintre presiunea de etanşare şi presiunea de calcul( 1m , v. tabelul 5.2).
cG pmbDF 32 , N (5.20)
Această forţă reprezintă forţa de strângere remanentă totală careasigură etanşarea îmbinării în exploatarea ( rG FF ).

188 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 5. Calculul asamblărilor cu flanşe 189

190 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 5. Calculul asamblărilor cu flanşe 191

192 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 5. Calculul asamblărilor cu flanşe 193
c) Forţa totală de strângere a şuruburilor în exploatare,la 0TT şi 0pp , se calculează cu relaţia:
Gt FFF , N (5.21)
în care:F - forţa de exploatare rezultată din aplicarea presiunii pe aria
determinată de diametrul de etanşare D3:
cpD
F4
23
, N (5.22)
Din diagrama forţe-deformaţii (fig. 5.6), între forţele ce acţionează înasamblare la montaj şi-n timpul exploatării există relaţia:
zGt FFFFF 0 , N (5.23)
în care:Ft - forţa totală ce acţionează în şuruburi în exploatare, la
temperatura normală de montaj T0 ;F - forţa de exploatare (v. relaţia 5.22);F0 - forţa de strângere iniţială a şuruburilor ( gFF 0 – relaţia 5.18);Fz - forţa suplimentară ce apare în şuruburi în exploatare.
Fig.5.6. Diagrama de deformare a elementelor asamblării cu şuruburicu strângere iniţială.

194 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
5.3.2. Calculul asamblărilor cu flanşe fără contact.
5.3.2.1. Calculul de rezistenţă a şuruburilor.Asamblarea cu flanşe propusă ca schemă de calcul este prezentă în
fig. 5.7.Forţa totală ce acţionează asupra şuruburilor în exploatare la
temperatură de montaj ( 0TT ), conform relaţiei (5.23) este:
FFFFF zt 00 , N (5.24)
unde: 21 reprezintă coeficientul încărcării interne:
Fig.5.7. Schema de calcul a asamblărilor cu flanşe fără contact.

Capitolul 5. Calculul asamblărilor cu flanşe 195
1 - coeficientul sarcinii axiale [3]:
tgfs
tg
1 (5.25)
unde: g , t , s , f - coeficienţii de elasticitate ai garniturii, ţevii,şuruburilor şi flanşelor, în mm/N.
Coeficientul sarcinii axiale variază între limitele: 0 1 1.În calcule aproximative se poate lua:
- la garnituri metalice: 3,0...1,01 ;
- la garnituri moi, inclusiv cauciuc: 4,0...2,01 ;
- la garnituri din cauciuc: 0,1...6,01 .Coeficientul de elasticitate a garniturii:
bDE
h
g
gg
3 , mm/N (5.26)
unde:
gE - modulul de elasticitate a materialului garniturii (v. tabelul 5.3).
Coeficientul de elasticitate a ţevii:
14 p
gst SDE
hl
, mm/N (5.27)
Coeficientul de elasticitate a şuruburilor:
4
3,02d
Ez
dl
s
ss
, mm/N (5.28)
unde: ls - lungimea de calcul a şurubului, mm;d - diametrul tijei şurubului, mm;z - numărul de şuruburi;Es - modulul de elasticitate al materialului şurubului (cu considerarea
temperaturii), MPa.Prin majorarea lungimii şurubului cu 0,3d, se ia în consideraţie, cu
aproximaţie, elasticitatea spirelor filetului.Coeficientul de elasticitate a flanşelor se determină cu luarea în
consideraţie a deformaţiei prin rotire a flanşei şi încovoierea zonei delegătură a acesteia cu învelişul cilindric al ţevii, cu relaţia:
D
DhE
aDf
13
2
lg
16,1
, mm/N (5.29)

196 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Valorile aproximative ale modulului de elasticitate agarniturilor din diverse materiale Tabelul 5.3
Forma şi materialul garniturii Modulul de elasticitateEg x105 , MPa
1. Garnituri plate, materialul garniturii:- folii cauciuc- cauciuc moale cu inserţii textilesau folii de cauciuc dur
- cauciuc dur cu inserţii textile
gh
bb 1104,0 4
- marsit, clingherit, paronit sau azbestpresat
0,03
- ftoroplast - 4 0,02- fibre 0,07- azbest armat cu reţea din sârmă 0,03- aluminiu moale 0,7- cupru moale 1,1- oţel moale 2,1
2. Membrane grofate cu umplutură dinazbest cu materialul învelişului din:- cupru sau aluminiu 0,4- oţel carbon sau inoxidabil 0,05
3.Membrane plate (netede) cu umplutură dinazbest cu materialul învelişului din:- aluminiu sau cupru 0,05- oţel moale, monel 0,06- oţel inoxidabil 0,06
Observaţie: În tabel s-au folosit simbolurile: b - lăţimea garniturii şi hg -grosimea garniturii, mm.
Valoarea lui se calculează cu relaţia (5.4). La temperaturi ridicate( 0300t C) trebuie să se ia în considerare şi micşorarea modulului deelasticitate (v. fig. 5.15).
Coeficientul presiunii interne [3]:
tgfs
f
*
2 (5.30)
unde: *f - coeficientul de elasticitate al flanşei, legat de deformaţiile radiale
ale peretelui ţevii sub acţiunea presiunii interne:

Capitolul 5. Calculul asamblărilor cu flanşe 197
D
DhE
aS
D
D Dmtf
1323
2*
lg18,0 , mm/N (5.31)
În calculele aproximative se poate lua:
D
m
a
S 3,02 (5.32)
unde: 102
1ppm SSS - grosimea medie a ţevii pe porţiunea conică, mm.
De obicei 3,01,02 .Forţa de strângere iniţială (prestrângere) F0 care asigură etanşeitatea
îmbinării, conform relaţiilor (5.23) şi (5.24) rezultă: rFFF 10 , N (5.33)
unde:Fr - forţa remanentă de etanşare în exploatare (v. rel. 5.20).Pentru a avea o anumită siguranţă la pierderea strângerii iniţiale în
exploatare şi ţinând seama de expresia forţei de exploatare (rel. 5.22), forţade strângere iniţială va fi:
rc Fp
DcF
41
23
0
, N (5.34)
unde:c - coeficient de siguranţă: c = 1,0…1,4, cu valori mai mari pentru
garniturile metalice şi pentru garniturile supuse la solicitări ciclice din parteasarcinilor din asamblare. Pentru garniturile din cauciuc c = 1.
Pentru asigurarea condiţiilor de etanşare la încercarea hidraulică,forţa de strângere iniţială este:
rph FpD
F 4
123
0
, N (5.35)
unde:
php – presiunea de încercare hidraulică şi ia de obicei valorile: cph pp 5,11,1 .
În acelaşi timp forţa de strângere iniţială trebuie să fie mai maredecât forţa de deformare elastoplastică a garniturii gF (rel. 5.18):
gFF 0 (5.36)
La alegerea forţei de strângere iniţială se studiază toate cele treicondiţii (5.34), (5.35), (5.36) şi se adoptă valoarea cea mai mare.

198 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Totuşi, valoarea adoptată trebuie să corespundă condiţiilor derezistenţă ale garniturii. Ţinând seama de şi de forţa “termică” suplimentară,presiunea pe garnitură va fi:
distrugere3
0 qbD
QFq t
(5.37)
cu:
mindistrugere qkq g ; 5,1gk şi minq - conform tabelului 5.2.
Forţa "termică" :
tgfs
sssfft
lttQ
, N (5.38)
unde: f , ft şi s , st - coeficienţii de dilatare liniară şi temperaturilematerialului flanşelor şi respectiv şuruburilor.
Coeficienţii de elasticitate g , t , s şi f din relaţia (5.38) sedetermină cu relaţiile (5.26)…(5.29).
Diferenţa de temperatură dintre temperatura şuruburilor şitemperatura flanşelor este, de obicei, 10 -15 oC, la temperatura fluidului de300-400 oC şi de 15-20 oC la temperatura fluidului de 400-500 oC (v. şitabelul 5.4).
Diferenţa de temperatură în momentul încălzirii trebuie să se ia de 3-4 ori mai mare.
Forţa totală ce acţionează pe şuruburile flanşelor în condiţiile delucru ( 0pp , 0TT ) este:
FQFP ts 0 , N (5.39)
Forţa de strângere iniţială 0F la montaj trebuie să îndeplineascăcondiţiile (5.34)…(5.37).
Condiţia de rezistenţă a şuruburilor flanşelor:
tc
stts dz
P
9,0...6,0
42
1
, MPa (5.40)
unde:
tp
tc R 2,0 - limita de curgere a materialului şurubului la temperatura
de lucru.La temperaturi ridicate, calculul se bazează pe rezistenţa tehnică de
durată 000.100/000.100/ rtr R sau pe limita tehnică de fluaj
000.100/1000.100/1 Rt .
Coeficientul de siguranţă a şurubului se determină din relaţia :

Capitolul 5. Calculul asamblărilor cu flanşe 199
tts
ttr
sc
000.100/1000.100/ (5.41)
cu condiţia ca cs = 1,5….2,5 .Rezistenţa şuruburilor flanşelor trebuie să fie verificată şi la
încercarea hidraulică şi pentru regimul tranzitoriu de încalzire.Tensiunea din şuruburi la presiunea de încercare hidraulică pph este:
202
1
23
0
9,0...6,04
4
c
ph
tph dz
pD
F
(5.42)
Tensiunea din şuruburi în timpul regimului tranzitoriu de încălzire sedetermină cu relaţia (5.40), introducând în relaţia de calcul a forţei PS
(relaţia 5.39) valoarea forţei "termice" Qt (relaţia 5.38), corespunzătoareregimului termic nestaţionar. Se va lua t
ptc R 2,0 corespunzătoare
temperaturii maxime. La temperaturi ridicate şi durată mare de funcţionarese va lua rezistenţa tehnică de durată (ex. t
r 000.100 ) sau limita tehnică de
fluaj (ex. t000.1001 ), deoarece acestea sunt totdeauna mai mici decât limita de
curgere la aceeaşi temperatură.
5.3.2.2. Calculul de rezistenţă a flanşelor.Acest calcul se bazează pe echilibrul momentelor exterioare,
determinate de forţele exterioare şi momentele interioare, obţinute dinprodusul dintre tensiunile interne şi modulul de rezistenţă al secţiunii maximsolicitată.
Tensiunile maxime în orice punct al flanşei nu trebuie să depăşeascăvaloarea tensiunii admisibile a materialului.
Pentru calculul flanşelor se consideră că forţa GF (relaţia 5.20)acţionează pe diametrul 3D , iar forţa de exploatare F (relaţia 5.22) serepartizează ca în fig. 5.7:
TD FFF , N (5.43)unde:
DF - forţa totală rezultată din aplicarea presiunii pe aria determinatăde diametrul D :
cD pD
F4
2 , N (5.44)
TF - forţa totală rezultată din aplicarea presiunii pe aria determinată

200 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
de diametrele D şi 3D :
cT p
DDF
4
223
, N (5.45)
sau:
DT FFF , N (5.46)Aceste forţe produc încovoierea discului flanşei în jurul cercului cu
diametrul 3D . Momentul încovoietor total are următoarele expresii:- la strângerea iniţială:
gGS FaM , N mm (5.47)
unde:2
32 DDaG
, mm (5.48)
- pentru condiţiile de exploatare:TTGGDD FaFaFaM 0 , N mm (5.49)
unde:22
12 pD
SDDa
(5.50)
pentru flanşele de tip integral, fig. 5.1 şi fig. 5.3;
22 DD
aD
(5.51)
pentru flanşele de tip liber, fig. 5.2 şi fig. 5.3;
GT aDD
a
4
3 (5.52)
pentru toate tipurile de flanşe, cu excepţia fig. 5.2, a;GT aa (5.53)
pentru flanşele de tip liber pe ţeavă răsfrântă, fig. 5.2, a.Valoarea de calcul a momentului încovoietor este cea mai mare
valoare obţinută din relaţiile: 21;max ccc MMM
unde: saf
taf
c MM201
; 02 MM c (5.54)
După metoda ASME [30, 34], tensiunile în flanşă pe cele trei direcţiiprincipale (meridională A , inelară T şi radială R ) au următoareleexpresii:
213 p
cMfA SDK
MKK , MPa (5.55)

Capitolul 5. Calculul asamblărilor cu flanşe 201
23
15
41
hDK
MKK cM
R
, MPa (5.56)
RcM
T ZhD
MKY
2, MPa (5.57)
unde: cM - momentul încovoietor de calcul ;
fK - factor pentru corecţia tensiunilor din gâtul flanşei (fig. 5.8), cedepinde de rapoartele adimensionale 01 / pp SS şi 0/ LL , unde:
00 pSDL
Fig.5.8. Nomogramă pentru determinarea coeficientului de corecţie fK .

202 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 5. Calculul asamblărilor cu flanşe 203

204 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI

Capitolul 5. Calculul asamblărilor cu flanşe 205

206 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
MK - factorul de corecţie pentru pasul şuruburilor zDt /2 (şi eltrebuie să fie 1):
hdz
DK M
22
, 1MK (5.58)
Dacă din calcul se obţine 1MK , se va considera totuşi 1MK .
1K , 2K , 3K - coeficienţi:
hL
KKK FLF
01
sau(5.59)
2
00
3
2
sau
p
VLV
SLU
hKKK (5.60)
21
31
KT
KK
(5.61)
Coeficienţii KF sau KFL se determină din nomogramele prezentate înfig. 5.9, KV sau KVL din fig. 5.10, în funcţie de rapoartele L/L0 şi Sp1/Sp0 , iarT, U, Y şi Z din fig. 5.11, în funcţie de raportul K=D1 / D.
Fig.5.11. Dependenţa coeficienţilor T, U, Y şi Z de raportul DDK /1 a flanşeiîn cazul 3,0

Capitolul 5. Calculul asamblărilor cu flanşe 207
Pentru flanşele de tip liber 0 RA .În cazul flanşelor de tip liber cu inel răsfrânt (vezi fig. 5.2, a sau 5.5
b), se determină şi tensiunile în inel:
ii SD
F
3
020
, MPa (5.62)
i
Gti SD
FF
3
, MPa (5.63)
Se consideră că flanşa rezistă solicitărilor dacă sunt îndeplinitecondiţiile:
- în flanşă:tafA 5,1 t
afTR ,
taf
RA
2
(5.64)
taf
TA
2
- în inelul răsfrânt sau din sudură, în cazul flanşelor libere:2020 8,0 aii
(5.65)tai
ti 8,0
unde tensiunile admisibile pentru materialul flanşei ( 20af , t
af ), cât şi
pentru materialul inelului răsfrânt ( 20ai , t
ai ) au valorile cele mai mici
rezultate din relaţia:
2
2020
1
2,01
sausau
sau
s
rm
s
tc
tp
a c
R
c
R (5.66)
cu:cs1 = 1,5 şi cs2 = 2,4.La temperaturi ridicate şi durată mare a funcţionării, se va lua
valoarea cea mai mică rezultată din relaţia:
2
000.100/1000.100/1
1
000.100/000.100/2
sausau
sau
f
tt
f
tr
tr
a c
R
c
R (5.67)
cu:
cf1 = 1,5 şi cf2 = 1,0 , unde tr 000.100 ( t
rR 000.100 ) este rezistenţa
tehnică de durată şi t000.1001 ( tR 000.1001 ) este limita tehnică de fluaj.

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI208
5.3.3. Calculul asamblărilor cu flanşe cu contact.
5.3.3.1. Calculul de rezistenţă a şuruburilor.
Forţa totală ce acţionează asupra şuruburilor în exploatare latemperatura de montaj ( 0TT ), conform relaţiei (5.23) este:
Gzt FFFFF 0
Pentru un singur şurub relaţia se poate scrie:11111 rzot FFFFF , N
Fig. 5.12. Asamblări cu flanşe cu contact direct.

Capitolul 5. Calculul asamblărilor cu flanşe 209
în care: zFF oo /1 – forţa de strângere iniţială a unui singur şurub, N;
zFF /1 – forţa de exploatare ce acţionează pe un şurub, N;
zFF Gr /1 –forţa remanentă asigurată în exploatare de un şurub, N;
1zF – forţa suplimentară pe un şurub, N;
11 Fcc
cF
ps
sz , N (5.68)
cs – rigiditatea şurubului, N/mm;cp – rigiditatea pachetului de piese strânse, N/mm.Pentru calculul rigidităţii şurubului se foloseşte relaţia:
sn
sn
s
s
s
s
s
n
i sis A
l
A
l
A
l
Ecc...
111
2
2
1
1
1
(5.69)
La şuruburile scurte ( dls 6 ), se consideră în calculul lungimiişurubului şi jumătate din înălţimea piuliţei şi a capului (fig. 5.12).
Rigiditatea pachetului se determină cu relaţia:
pnpn
pn
pp
p
pp
pn
i pip AE
l
AE
l
AE
l
cc
...11
22
2
11
1
1
(5.70)
unde, de exemplu:
1
111
p
ppp l
AEc , N/mm (5.71)
2211 4 gechp dDA
, mm2 (5.72)
tg111 pech lDD , mm (5.73)
SD 95,01 , mm (5.74)S – deschiderea cheii, mm; - unghiul generatoarei tronconului volumului de material deformat.
Metoda clasica foloseşte încă pe scară largă o45 . Birger recomandăo2722 ( 5,04,0tg ), iar Orlov recomandă o3010 .
Când se ţine seama şi de rigiditatea garniturii (fig. 5.12, a):
3
333
p
ppp l
AEc , N/m (5.75)
unde:
gp EE 3 – modulul de elasticitate a garniturii (v. tabelul 5.2).
221
3pp
p
AAA
, mm2 (5.76)

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI210
iar gp hl 3 – grosimea garniturii.
O relaţie care exprimă mai exact rigiditatea flanşelor (fig. 5.12 c), înmai bună concordanţă cu măsurătorile practice este dată de Junker subforma (se neglijează grosimea garniturii):
2
2
4 gpi
pi
pp d
k
lS
l
Ec
, N/mm (5.77)
valabilă când Sb 3 şi dll pp 821 iar 10k pentru oţel; 8k
pentru fontă; 6k pentru aluminiu sau aliaje de aluminiu.Pentru flanşe (fig. 5.12, d) la care SbS 3 iar dll pp 821 (d
– diametrul şurubului):
10051
84
2212122 pppp
gp
llllS
S
bdSA
(5.78)
iar rigiditatea pachetului se calculează cu relaţia:
21 pp
ppp ll
AEc
, N/mm (5.79)
Influenţa regimului termic asupra asamblării cu flanşe.Asamblările cu şuruburi din instalaţiile termice (când C150ot )
sunt influenţate de temperatura fluidului. Temperatura pereţilor conductei(recipientului) şi a flanşelor ce vin în contact cu fluidul cald este superioarătemperaturii şurubului. Aceasta duce la deformaţii inegale între pachetul depiese şi şurub, iar la temperaturi ridicate, la modificări ale caracteristicilormecanice ale elementelor asamblării (scade modulul de elasticitate).
Sub acţiunea căldurii, flanşele şi şuruburile suferă dilataţii liniarediferite pe direcţia axei asamblării (fig. 5.13):
cccct tll , mm (5.80)
fffft tll , mm (5.81)
sssst tll , mm (5.82)
rezultând o diferenţă de dilatare tl :
sssfffccct tltltll 2 , mm (5.83)
unde: c , f , s – sunt coeficienţii de dilatare liniară pentru gulerulconductei, flanşele independente şi şuruburi;
ct , ft , st – reprezintă diferenţa dintre temperatura de exploatareşi cea de montare pentru aceleaşi elemente:

Capitolul 5. Calculul asamblărilor cu flanşe 211
0ttt fluidc , oC (5.84)
cffluidf tttt 0 ,oC (5.85)
csfluids tttt 0 , oC (5.86)
unde:
cft şi cst – reprezintă diferenţa de temperatură dintre conductă şiflanşă, respectiv conductă şi şurub (v. tabelul 5.4).
Pe diagrama şurubului (fig. 5.14) , dreapta AE , corespunzătoaretemperaturii normale (de montaj), se deplasează cu distanţa tl în poziţia
EA . În această poziţie, pentru aceiaşi forţă de exploatare F1, creşte atâtstrângerea iniţială cât şi forţa totală din şurub.
Dacă se ţine seama de scăderea modulului de elasticitate (fig. 5.15),rigiditatea şurubului şi pachetului se micşorează şi se calculează conform
relaţiilor:
sn
sn
s
s
s
sts
ts A
l
A
l
A
l
Ec...
11
2
2
1
1 , mm/N (5.87)
pntpn
pn
ptp
p
ptp
p
tp AE
l
AE
l
AE
l
c ...
1
22
2
11
1 , mm/N (5.88)
respectiv:
Fig. 5.13. Asamblare cu flanşe în regim termic.

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI212
2
2
4 gpi
pi
tpt
p dk
lS
l
Ec
, N/mm (5.89)
sau:21 pp
ptpt
p ll
AEc
, N/mm (5.90)
corespunzătoare, succesiv, relaţiilor (5.69), (5.70), (5.77) şi (5.79).
Tabelul 5.4Exemple de diferenţe de temperatură dintre şuruburi si elementele
unei asamblări cu flanşe (bine izolate termic în contact cu vapori de apă).Diferenţa de temperatură între
elementele unei asamblări cu flanşeTemperatura aburului în timpul
exploatării, 0C300 350 400 450 500
Flanşă de tip integral (cu gât)Diferenţa de tempe-ratură dintre flanşă şişurub în perioada de
încălzire 20 35 55 90 150exploatare 12 15 17 19 20
Diferenţa de tempe-ratură dintre garniturade etanşare şi şuruburiîn perioada de
încălzire 55 75 105 145 210
exploatare 20 24 27 29 30
Flanşă de tip liber, flanşe inelare sudateDiferenţa de tempe-ratură dintre flanşă şişurub în perioada de
încălzire 13 22 34 50 85exploatare 3 5 6 8 9
Diferenţa de tempe-ratură dintre umărul saubordura ţevii şi şuruburiîn perioada de
încălzire 70 90 110 140 170
exploatare 10 15 20 25 30
Din diagrama şurubului (fig. 5.14) se observă că şi .
Forţa de prestrângere devine 11 ot
o FF . Forţa totală în şurub, pentru aceiaşi
forţă de exploatare F, devine 11 tt
t FF , iar forţa remanentă 11 rt
r FF astfel
încât se poate scrie:
11 Fcc
cF
tp
ts
tst
z (5.91)
11111 FFFFF tr
tz
to
tt (5.92)

Capitolul 5. Calculul asamblărilor cu flanşe 213
De asemenea, din triunghiul AOE se poate scrie:
psops cc
Fll11
100
Din triunghiul EOA t ':
tp
ts
totps cc
Flll11
100
astfel încât:
tps
otp
ts
to l
ccF
ccF
111111
deci:
tp
ts
tps
o
to
cc
lcc
F
F11
111
1
(5.93)
Fig. 5.14. Diagrama de funcţionare a şurubuluicu strângere iniţială în regim termic.

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI214
Verificarea şurubului.
1.Verificarea la strângerea iniţială ( 0pp şi 0TT ):
Se determină tensiunea de tracţiune datorită forţei Fo1:
21
110
4
d
F
A
F o
s
ot
, MPa (5.94)
şi tensiunea de torsiune:
16
2tg
31
221
00 d
dF
W
M o
ps
tt
, MPa (5.95)
în care:
ps
sto cc
cFFF
111 (5.96)
unde:z
F
z
FFFF G
rt 111 (5.97)
cu F, calculată cu relaţia (5.22) şi FG cu relaţia (5.19).
Fig. 5.15. Variaţia modulului de elasticitate cu temperatura.

Capitolul 5. Calculul asamblărilor cu flanşe 215
2 – unghiul de înclinare a spirei filetului şurubului:
22 arctg
d
p
(5.98)
p – pasul filetului şurubului, mm (v. anexa 1);2d – diametrul mediu al filetului şurubului, mm (v. anexa 1);
– unghiul de frecare aparent:
2/cosarctg 1
(5.99)
1 – coeficientul de frecare dintre spirele filetului şurubului şi alepiuliţei (v. tabelul 5.5);
- unghiul filetului (pentru filetele metrice triunghiulare o60 ).Tensiunea echivalentă după ipoteza de rupere a lucrului mecanic de
deformaţie este:202
020 3 asttech (5.100)
cc
as
2020
(5.101)
unde: 20c – limita de curgere la temperatura obişnuită. Pentru 20
as , vezi şitabelul 5.7.
c – coeficient de siguranţă cu valorile:75,125,1 c pentru şuruburi montate îngrijit;5,275,1 c pentru condiţii obişnuite de montaj şi mm14d ;
35,2 c (sau mai mult) pentru şuruburi cu mm14d , undeexistă pericolul ruperii la montaj.
Tabelul 5.5Coeficientul de frecare între şurub şi piuliţă.
Natura materialelorşurubului şi piuliţei
Coeficientul de frecare, 1
suprafeţe unse suprafeţe uscateoţel/oţel 0,08 - 0,15 0,15 - 0,38
oţel/fontă 0,10 - 0,14 0,16 - 0,18oţel/bronz 0,04 - 0,09 0,10 - 0,20
2. Verificarea şuruburilor în exploatare la temperatura obişnuită(de montaj) ( 0pp şi 0TT )
Cazul cel mai dezavantajos este atunci când, pe un şurub, pe lângătensiunea de tracţiune tf , datorată forţei totale 1tF , este prezentă şi

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI216
tensiunea de torsiune 0t datorită păstrării în timpul funcţionarii amomentului de torsiune 0tM aplicat pentru crearea forţei de strângereiniţială 1oF , conform relaţiei (5.95):
21
11 4
d
F
A
F t
s
ttf
, MPa (5.102)
2020
2 3 asttfechf (5.103)
Dacă se face şi strângerea sub sarcină, apare tensiunea de răsucire:
16
2tg
31
221
d
dFt
tf
, MPa (5.104)
ceea ce face ca tensiunea echivalentă:2022 3 astftfechf (5.105)
să se apropie de limita de curgere. Aceasta poate duce la deformarea plasticăa şurubului, slăbirea strângerii garniturii, apariţia neetanşeităţii (la recipientesub presiune) şi chiar explozia garniturii. De aceea nu se recomandăstrângerea şuruburilor sub sarcină.
3. Verificarea şurubului în exploatare la temperatura defuncţionare ( 0pp şi 0TT )
Se determină tensiunea de tracţiune datorată forţei ttF 1 :
tas
tt
s
ttt
tf d
F
A
F
21
11 4(5.106)
Dacă se face şi strângerea sub sarcină, la temperatura de funcţionareapare şi o tensiune de răsucire:
16
tg2
31
22
1
d
dF t
tttf
, MPa (5.107)
Tensiunea echivalentă devine:
tas
ttf
ttf
techf
223 (5.108)
Tensiunea admisibilă tas se stabileşte în funcţie de materialul
şurubului şi temperatura de lucru, conform tabelului 5.6.

Capitolul 5. Calculul asamblărilor cu flanşe 217
Tabelul 5.6Relaţii de calcul pentru tensiunile admisibile.
Relaţia de calcul Coeficienţi de siguranţăDacă C400oct 1as
tas
Dacă C400oct tas
tas
tas 21,min
unde :
ss
tp
tct
as c
R 2,01
sau ;
2
10/1
1
10/2
55
,minfs
t
fs
trt
as cc
;
Pentru C20ot :
ss
pcas c
R 2,020 sau
Pentru oţelurile carbon:8,2ssc - pentru 6,0/ rc 3,2ssc - pentru 6,0/ rc
Pentru oţelurile austenitice:9,1ssc - pentru 6,0/ rc
8,11 fsc ; 1,12 fsc
Verificarea etanşeităţii.
1.Verificarea garniturii la montaj (p=p0 şi T=T0)La montaj garnitura este strânsă de către un şurub cu forţa 1oF .
Tensiunea de strivire datorată strângerii tuturor şuruburilor este:
min3
11 qkqbD
Fz
A
Fzq gdisturgere
o
g
o
(5.109)
cu lăţimea eficace a garniturii b conform relaţiei (5.17), 5,1gk şi minq
conform tabelului 5.2.
2.Verificarea etanşeităţii în exploatare.Atât pentru temperatura normală ( 0TT ) cât şi pentru temperatura
de funcţionare, se verifică dacă:- pentru etanşări cu garnituri moi:
111 9,1...5,0şi FFF trr , N (5.110)
- pentru etanşări cu garnituri metalice profilate: 111 9,2...2,1şi FFF t
rr , N (5.111)- pentru etanşări cu garnituri metalice plate:
111 4,1...2,1şi FFF trr , N (5.112)

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI218
5.3.3.2. Calculul de rezistenţă a flanşelor.
Flanşa se consideră ca o placă circulară încastrată pe cercul deamplasarea şuruburilor (fig.5.16). În această ipoteză şi pentru D / D1 0,5 sepoate neglija influenţa tensiunilor circulare şi flanşa poate fi considerată cao grindă dreaptă.
Unghiul de rotire a flanşei, în secţiunea dispusă la distanţa 1l de zonade încastrare, produs de acţiunea forţei FD şi a momentului M1 este:
IE
lMr
IE
lF mD 112
1 2
2
(5.113)
unde momentul de inerţie al secţiunii:
12
32 hdzD
I g
, mm4 (5.114)
În relaţiile (5.113) şi (5.114), FD reprezintă forţa internă ceacţionează în asamblarea cu flanşă şi are expresiile:
cD pD
F4
25
pentru cazul general - fig. 5.4 sau:
cD pD
F4
2
conform fig. 5.7.M1 - momentul de încovoiere pe unitatea de lungime pe diametrul
mediu al ţevii;mr - raza medie a ţevii;
20p
m
SDr
- pentru flanşele fără gât tronconic;
2m
mSD
r
- pentru flanşele cu gât tronconic,
Sm - grosimea medie a ţevii pe porţiunea conică:z - numărul de şuruburi;
dg - diametrul găurilor din flanşă pentru şuruburi.
210 pp
m
SSS
(v. fig. 5.4 şi 5.7);
Pe de altă parte, unghiul de rotire a unui înveliş cilindric, ţinândseama şi de influenţa presiunii interne asupra mărimii unghiului de rotire, sedetermină cu relaţia:

Capitolul 5. Calculul asamblărilor cu flanşe 219
00
2
30
0103,125,4
pmp
mc
p
pm
SrSE
rp
SE
SrM (5.115)
Fig. 5.16. Schema calculului de rezistenţă a flanşei
Egalând expresiile (5.113) şi (5.115) se obţine :
30
01
00
221
1
25,42
03,12
p
pmm
pmp
mcD
SE
Sr
IE
lr
SrSE
rp
IE
lF
M
,mm
mmN(5.116)
Tensiunea de încovoiere în peretele ţevii în zona de îmbinare cuflanşa (secţiunea LM - fig. 5.4 şi fig. 5.16) este:
rp
i S
M 6,0
62
0
1LM , MPa (5.117)
Momentul de încovoiere în secţiunea de încastrare a flanşei(secţiunea AB - fig. 5.4 şi fig. 5.16) este:
11 2 MrlFM mD , N mm (5.118)
Tensiunea de încovoiere în această secţiune se calculează cu relaţia:
rg
i hdzD
M
6,0
62
2AB
, MPa (5.119)
r - rezistenţa de rupere a materialului flanşei, cu luarea înconsiderare a temperaturii şi duratei de lucru.
Metodologia calculului asamblărilor cu flanşe este prezentată întabelul 5.7 [3, 30].

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI220
Tabelul 5.7Metodologia calculului asamblărilor cu flanşe. [3,30]
Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
1. Date iniţiale: presiunea de calcul cp ;
temperatura de calcul ct ;
condiţii de funcţionare impuse.2. Date adoptate se determină forma constructivă a suprafeţei de
etanşare, în funcţie de presiunea de calcul pc şitemperatura de calcul tc a mediului de lucru;
se alege tipul de flanşă (v. fig. 5.1, 5.2 şi 5.3); se adoptă dimensiunile constructive standardizate
ale flanşelor şi ale elementelor filetate pentruasamblarea acestora;
se alege materialul flanşelor şi şuruburilor); se adoptă tipul garniturii şi materialul acesteia (v.
tabelul 5.2).CALCULUL ASAMBLĂRILOR CU FLANŞE FĂRĂ CONTACTA. CALCULUL SIMPLIFICATI. Asamblare cu flanşe de tip integral
3. Schema decalcul
vezi fig. 5.5
4. Calcululşuruburilor
a) forţa totală pe şuruburi (v. relaţia 5.1):
cs pD
kP4
23
, N
b) verificarea şuruburilor la tracţiune (v. relaţia 5.2):tc
sts
dz
P
6,0
42
1
, MPa
pentru: d1 - v. tabelul 5.5.5. Calculul
flanşeia) momentul de încovoiere pe unitatea de lungime
(v. relaţia 5.3):4D
aPM Ds
i , Nmm/mm
pentru - v. relaţia 5.4.b) tensiunea de încovoiere în secţiunea periculoasă a
flanşei (secţiunea AB - fig. 5.5, a) - v. relaţia 5.5:
tc
pp
Dsi SSD
aP
6,06
211
, MPa

Capitolul 5. Calculul asamblărilor cu flanşe 221
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
II. Asamblare cu flanşe tip liber.6. Schema de calcul vezi fig. 5.5.7. Calculul
şuruburilor idem pct. 4 tabelul 5.7.
8. Calculul flanşelor tensiunea circulară din flanşă (v. relaţia 5.6): t
c
ii
si
D
DhD
DDP
7,0
ln
6
12
42
, MPa
B. CALCULUL PRECIS (Schema de calcul v. fig. 5.7.)9. Calculul lăţimii
eficace b agarniturii şi adiametrului D3,pe care serepartizeazăreacţiuneagarniturii.
a) se determină valoarea 100 , BBfb -v. tabelul5.1:
- dacă 5,60 b mm, atunci: 0bb , mm;
- dacă 5,60 b mm, atunci: 052,2 bb , mm
b) diametrul D3:
23icec DD
D
, mm
unde: Dec - diametrul exterior de contact;Dic - diametrul interior de contact a garniturii
cu flanşa.10. Calculul forţelor
care acţionează înasamblare, latemperaturanormală (T=T0),v. fig. 5.6.
a) forţa de strângere a garniturii în exploatare(forţa remanentă):
totală (v. relaţia 5.20):cGr pbDFF 32 , N
pe un şurub:
z
FF r
r 1 , N
unde: z - numărul de şuruburi;m, q - se aleg din tabelul 5.2 în funcţie de tipul
garniturii.b) forţa de exploatare: totală (v. relaţia 5.22):
cpD
F4
23
, N

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI222
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
pe un singur şurub:
z
FF 1 , N
c) forţa totală de strângere a şuruburilor înexploatare, la temperatura normală:
totală (v. relaţia 5.21):rt FFF , N
pe un şurub:
z
FF t
t 1 , N
11. Calcululcoeficientuluiîncărcăriiinterne: 1 2
a) calculul coeficientului sarcinii axiale(v. relaţia 5.25):
tgfs
tg
1
unde:g - coeficientul de elasticitate al garniturii
(v. relaţia 5.26.):
bDE
h
g
gg
3 , mm/N
pentru Eg - v. tabelul 5.3.t - coeficientul de elasticitate al ţevii
(v. relaţia 5.27.):
14 p
gst SDE
hl
, mm/N
s - coeficientul de elasticitate al şuruburilor(v. relaţia 5.28):
4
3,02d
Ez
dl
s
ss
, mm/N
f - coeficientul de elasticitate al flanşelor(v. relaţia 5.29):

Capitolul 5. Calculul asamblărilor cu flanşe 223
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
D
DhE
aDf
13
2
lg
16,1
, mm/N
pentru - v. relaţia 5.4.În calcule aproximative se poate lua:
- la garnituri metalice: 3,0...1,01 - la garnituri moi: 4,0...2,01 - la garnituri din cauciuc: 0,1...6,01
b) calculul coeficientului presiunii interne(v. relaţia 5.30):
tgfs
f
*
2
unde:*f - coeficientul de elasticitate al flanşei, legat de
deformaţiile radiale ale peretelui ţevii sub acţiuneapresiunii interne (v. relaţia: 5.31):
D
DhE
aS
D
D Dmtf
1323
2*
lg18,0 , mm/N
În calculele aproximative se poate lua (v. relaţia 5.32):
D
m
a
S3,02
cu: 102
1ppm SSS - grosimea medie a ţevii pe
porţiunea conică, mm.Uzual 3,0...1,02 .
12. Calcululforţei destrângereiniţialătotală F0
pe cele zşuruburi
Se va adopta ca forţă de strângere iniţială pe toateşuruburile F0, valoarea cea mai mare, rezultată dinîndeplinirea condiţiilor:a) siguranţa la pierderea strângerii iniţiale în exploatare
(v. relaţia 5.34):
Gc Fp
DkF
41
23
0
, N
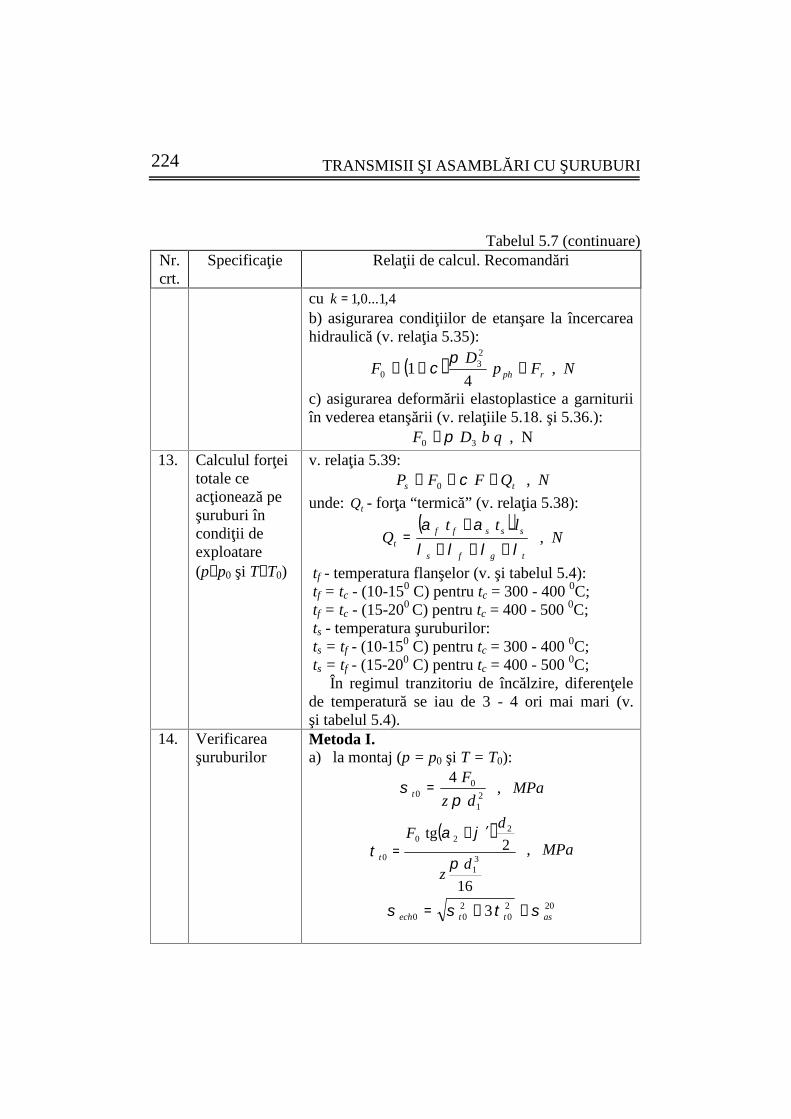
TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI224
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
cu 4,1...0,1kb) asigurarea condiţiilor de etanşare la încercareahidraulică (v. relaţia 5.35):
rph FpD
F 4
123
0
, N
c) asigurarea deformării elastoplastice a garnituriiîn vederea etanşării (v. relaţiile 5.18. şi 5.36.):
qbDF 30 , N
13. Calculul forţeitotale ceacţionează peşuruburi încondiţii deexploatare(pp0 şi TT0)
v. relaţia 5.39:ts QFFP 0 , N
unde: tQ - forţa “termică” (v. relaţia 5.38):
tgfs
sssfft
lttQ
, N
tf - temperatura flanşelor (v. şi tabelul 5.4):tf = tc - (10-150 C) pentru tc = 300 - 400 0C;tf = tc - (15-200 C) pentru tc = 400 - 500 0C;ts - temperatura şuruburilor:ts = tf - (10-150 C) pentru tc = 300 - 400 0C;ts = tf - (15-200 C) pentru tc = 400 - 500 0C;
În regimul tranzitoriu de încălzire, diferenţelede temperatură se iau de 3 - 4 ori mai mari (v.şi tabelul 5.4).
14. Verificareaşuruburilor
Metoda I.a) la montaj (p = p0 şi T = T0):
21
00
4
dz
Ft
, MPa
16
2tg
31
220
0d
z
dF
t
, MPa
2020
200 3 asttech

Capitolul 5. Calculul asamblărilor cu flanşe 225
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
b) în exploatare la temperatura de funcţionare(p p0 şi T T0) - v. relaţia 5.40:
tas
stts dz
P
21
4
În aceste relaţii:20; as
tas - v. tabelul 6.7;
2 - v. relaţia 6.98;2
2 arctgd
p
p - pasul filetului (v. tabelul 5.5);d2 -diametrul mediu al filetului (v.tabelul 5.5); -unghiul de frecare aparent (v.relaţia 5.99):
2cos
arctg 1
1 - coeficientul de frecare, (v. tabelul 5.6);
- unghiul profilului filetului (pentru filetelemetrice o60 );
c) la încercarea hidraulică ( phpp şi 0TT )
(v. relaţia 5.42):
202
1
23
0 44
as
ph
tphdz
pD
F
d) în perioada de încălzire (regim tranzitoriu):FQFP tîst 0 , N
tgfs
ssîsfîftî
lttQ
, N
cu: C151043 o cfî tt ,
pentru C400300 oct ;
C201543 o cfî tt ,
pentru C500400 oct ;
C151043 o fîsî tt ,

226 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
pentru C400300 oct ;
C201543 o fîsî tt ,
pentru C500400 oct ;
tas
sîtîts dz
P
21
4
Metoda II. (ISCIR)Se calculează aria totală a secţiunilor şuruburilor
necesare pentru:a) prevenirea pierderii etanşeităţii în timpul
exploatării:
tas
Gnec
FFA
1 , mm2
b) asigurarea strângerii garniturii cu presiunea destrivire q:
202as
gnec
FA
, mm2
21 şimax necnecnec AAA Aria totală a secţiunilor şuruburilor efectivă
este:
4
21d
zAzA efsef
, mm2
Se impune ca necef AA
15. Verificareagarniturilor
Metoda I.a) la montaj:
distrugeremef qbD
Fq
3
0,
,
b) în exploatare (v. relaţia 5.37):
distrugeret
exef qbD
QFq
3
0,
unde: tQ - forţa “termică” - v. relaţia 5.38 sau pct.13 tabelul 5.8.
minqkq gdistrugere

Capitolul 5. Calculul asamblărilor cu flanşe 227
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
cu:4...5,1gk şi minq -conform tabelului 5.2.
Etanşeitatea se poate verifica şi dacă:- pentru etanşarea cu garnituri moi:
FFF rG 9,1...5,0 , N
- pentru etanşarea cu garnituri metaliceprofilate:
FFF rG 9,2...2,1 , N
- pentru etanşarea cu garnituri metaliceplate:
FFF rG 4,1...2,1 , N
Metoda II (ISCIR)Se verifică dacă:
03
20
min 2b
qD
Ah asef
, mm
unde: b0 - conform tabelului 5.1.q - conform tabelului 5.2.
16. Verificareaflanşelor(v. fig. 5.7)a. Calcululmomentelorîncovoietoare.
la strângerea iniţială (v. relaţia 5.47):0FaFaM GgGs , Nmm
232 DD
aG
, mm
pentru condiţiile de exploatare (v. relaţia5.49):
TTGGDD FaFaFaM 0 , Nmm
unde: cD pD
F4
2 , N (v. relaţia 5.44)
cG pmbDF 32 , N (v. relaţia 5.20)
cT pDD
F4
223
, N (v. relaţia 5.45)
pentru flanşe tip integral (fig. 5.1 şi 5.3):
2212 p
D
SDDa
, mm(v. relaţia 5.50)

228 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
pentru flanşe tip liber (fig. 5.2 şi 5.3):
22 DD
aD
, mm (v. relaţia 5.51)
pentru toate tipurile de flanşe cu excepţiafig. 5.2 a:
GT aDD
a
4
3 , mm (v. relaţia 5.52)
pentru flanşele de tip liber pe ţeavărăsfrântă, fig. 5.2 a:
GT aa , mm (v. relaţia 5.53)b. Determinareamomentului decalcul
21 ,max ccc MMM unde:
s
af
taf
c MM201
, 02 MM c
unde (v. relaţiile 5.66 şi 5.67):
2
20
1
2020 ,min
s
r
s
caf cc
dacă C400oct :
1s
tct
af c
dacă C400oct :
2
10/1
1
10/ 55
,minf
t
f
trt
af cc
cu: 5,11 sc ; 4,22 sc ; 5,11 fc ; 12 fc .
c. Determinareafactorilor deformă ai flanşei
00 pSDL ; 0/ LL
DDK /1 ; 01 / pp SS
d. Determinareacoeficienţilor decorecţie:
1. coeficientul de corecţie Kf a tensiunilor dingâtul flanşei - v. fig. 5.8;2. coeficientul KF, pentru flanşe tip integral şiKFL, pentru flanşe tip liber (v. fig. 5.9), înfuncţie de rapoartele adimensionale L / L0 şi Sp1
/ Sp0;

Capitolul 5. Calculul asamblărilor cu flanşe 229
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
3. coeficientul KV, pentru flanşe tip integral şiKVL, pentru flanşe tip liber (v. fig. 5.10), înfuncţie de rapoartele adimensionale L / L0 şi Sp1 /Sp0;4. coeficientul de corecţie KM, pentru pasulşuruburilor zDt /2 (v. relaţia 5.58):
hdz
DK M
22
; 1MK
unde: d - diametrul nominal al şurubului (v.tabelul 5.4); z - numărul de şuruburi; h -grosimea flanşei; D2 - diametrul de amplasare aşuruburilor.Dacă 1MK , se consideră totuşi 1MK .5. coeficienţii T, U, Y şi Z - v. fig. 5.11 în funcţiede raportul K = D1 / D.6. coeficientul K1 - v. relaţia 5.59:
0
1
sau
L
hKKK FLF
7. coeficientul K2 - v. relaţia 5.60:
200
3
2
sau
p
VLV
SLU
hKKK
8. coeficientul K3 - v. relaţia 5.61:
21
3
1K
T
KK
e. Calculultensiunilor dinflanşe: (vezirelaţiile 5.55,5.56 şi 5.57):
213 p
cMfA SDK
MKK , MPa
23
15
41
hDK
MKK cM
R
, MPa
RcM
T ZhD
MKY
2, MPa
Observaţie: pentru flanşe tip liber:0 RA

230 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
f. Calculultensiunilor dininelul răsfrântsau din sudură,în cazulflanşelor de tipliber (vezirelaţiile. 5.62 şi5.63)
ii SD
F
3
020
, MPa
i
Gti SD
FF
3
, MPa
g) Verificareacondiţiilorimpusetensiunilor
1. din flanşă (v. relaţia 5.64):tafA 5,1tafTR ,
taf
RA
2
taf
TA
2
2. din inelul răsfrânt sau din sudură, în cazulflanşelor libere (v. relaţia 5.65):
2020 8,0 aii tai
ti 8,0
Observaţii
1. Tensiunile admisibile sînt cele determinate lapct. 16, b tabelul 5.8. Ele sunt determinate pebaza caracteristicilor mecanice ale materialului,corespunzătoare temperaturii de regim.2. La proba hidraulică se acceptă:
209,0...8,0 ca 3. În cazul mediilor de lucru letale, coeficienţiide siguranţă 1sc , 2sc , 1fc , 2fc se măresc cu 20%.

Capitolul 5. Calculul asamblărilor cu flanşe 231
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
CALCULUL ASAMBLĂRILOR CU FLANŞE CU CONTACTA. CALCULUL SIMPLIFICAT
17. Date iniţiale – v. pct. 1 tabelul 5.718. Date adoptate - v. pct. 2 tabelul 5.719. Schema de
calcul- v. fig. 5.4
20. Calcululşuruburilor
a) forţa totală pe şuruburi (v. relaţia 5.7):
2
2125
4 l
llp
DkP cS
, N
unde: k – coeficient de strângere; 5,2...5,1k ;D5 – diametrul garniturii (inelului) de etanşare.De obicei 15 lDD – distanţa de la cercul mediual ţevii la cercul axelor şuruburilor:
2202
1pSDD
l
, mm
2l – distanţa de la cercul exterior al flanşei lacercul axelor şuruburilor.
221
2
DDl
, mm
b) Verificarea şuruburilor la tracţiune (v. relaţia5.8):
tc
Sts dz
P
8,0...6,0
42
1
pentru: d1 – v. anexa 1.21. Calculul flanşei
a) momentul de încovoiere în secţiunea AB (v.relaţia 5.9):
1lFM Di , Nmm
unde: FD – forţa internă ce acţionează înasamblarea cu flanşe:
4
25D
FD
, N
De obicei: DD 5 .

232 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
- coeficient de micşorare a momentului deîncovoiere datorită legăturii elastice între flanşăşi ţeavă:
2
1
t
g
m
pm
D
dzD
S
h
l
Sr
2
3
1
072,0
unde: Sm - grosimea medie a ţevii pe porţiuneaconică:
102
1ppm SSS
h - grosimea flanşei, mm;rm - raza medie a ţevii pe porţiunea conică:
22m
m
SDr , mm
Dt - diametrul mediu al ţevii:0pt SDD , mm
0pS - grosimea gâtului flanşei la capătuldinspre elementul de recipient (grosimea ţevii),mm;
1pS - grosimea gâtului flanşei la capătuldinspre taler, mm;
2D - diametrul cercului de amplasare aşuruburilor, mm;
Pentru calcule aproximative se poate lua:1...8,0 .
b) Calculul tensiunii de încovoiere în secţiuneaAB a flanşei (fig. 5.5), (v. relaţia 5.12):
tr
g
ii
hdzD
M
6,0
62
2
unde: z - numărul de şuruburi.

Capitolul 5. Calculul asamblărilor cu flanşe 233
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
c) Momentul de încovoiere în secţiunea LM a ţevii(v. relaţia 5.13):
11 1 lFM Di
sau 1
25
1 41 lp
DM ci
, N mm
d) Calculul tensiunii de încovoiere în secţiuneaLM a flanşei (fig.5.5) (v. relaţia 5.14):
tr
p
ii
SD
M
6,0
6214
11
unde: 4D - diametrul mediu al gâtului flanşei însecţiunea LM de încastrare cu talerul flanşei:
14 pSDD , mm
Dacă nu se cunoaşte tr , se poate considera t
c amaterialului flanşei.
B. CALCULUL PRECIS (schema de calcul - v. fig.5.4 şi 5.12)22. Calculul
rigidităţiişurubului
v. fig. 5.12 şi relaţia 5.69:
sn
sn
s
s
s
s
ss A
l
A
l
A
l
Ec...
11
2
2
1
1 , mm/N
cu: As1 ... Asn - ariile secţiunilor fiecărui tronson alşurubului.
La şuruburile scurte dls 6 , se consideră încalculul lungimii şurubului şi jumătate dinînălţimea piuliţei şi a capului şurubului.
23. Calcululrigidităţiipachetului depiese strânse
v. fig. 5.12 şi relaţia 5.70:
pnpn
pn
pp
p
pp
p
p AE
l
AE
l
AE
l
c ...
1
22
2
11
1 , mm/N
Concret, conform fig. 5.12, b:
211 4 gechp dDA
; 2
22 4 gechp dDA
tg111 pech lDD ; tg222 pech lDD
221
3pp
p
AAA

234 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
unde: SD 95,01 ;S - deschiderea cheii, mm; - unghiul generatoarei tronconului
volumului de material deformat.Se recomandă: o27...22 ,
hll pp 21 - grosimea flanşelor.Observaţii:
gp hl 3 - grosimea garniturii, mm;
pgp EE 3 - v. tabelul 5.3.
Rigiditatea întregului pachet de piesestrânse, cu neglijarea grosimii garniturii, se poatecalcula şi cu relaţia lui Junker (v. relaţia 5.77 şifig. 5.12 b):
2
2
4 gpi
pi
pp d
k
lS
l
Ec
, N/mm
cu: 10k pentru oţel; 8k pentru fontă şi6k pentru aluminiu şi aliajele sale.
Pentru flanşe la care SbS 3 , şidll pp 821 (v.fig. 5.12, c, d şi relaţia 5.78):
10051
84
2212122 pppp
gp
llllS
S
bdSA
iar rigiditatea pachetului se calculează cu relaţia(v. relaţia 5.79):
21 pp
ppp ll
AEc
, N/mm
24. Calculul forţelorce acţionează înasamblare latemperaturanormală demontaj (T = T0),vezi fig. 5.6.
Cazul I. Între flanşe se interpune un anumit tipde garnitură (fig. 5.12, a):
a) calculul lăţimii eficace b a garniturii şi adiametrului D3 pe care se repartizeazăreacţiunea garniturii - Idem pct. 9 tabelul 5.7.

Capitolul 5. Calculul asamblărilor cu flanşe 235
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
b) calculul forţelor care acţionează înasamblare la temperatura normală de montaj(T = T0) - Idem pct. 10 şi 12, tabelul 5.7.
Cazul II. între flanşe nu se interpune garnitură(fig. 5.12 c, d):a) forţa de exploatare ce acţionează pe un singur
şurub:
cpz
DF
4
23
1
, N
b) forţa suplimentară pe un singur şurub:
FFcc
cF
ps
sz
11 , N
unde:ps
s
cc
c
reprezintă coeficientul încărcării interne;valori uzuale ale lui sunt:
- pentru asamblare fără garnituri elastice:3,02,0
- pentru asamblări cu garnituri elastice(azbest. clingherit, marsit, paronit, cauciuc, etc.):
5,04,0 c) forţa de strângere iniţială pe un şurub,
necesară asigurării strângerii remanente înexploatare:
111111 FFFFFF zotr
111111 1 FFFFFF oor La limită când 01 rF , min11 oo FF
1min1 1 FFo , N
Practic forţa de prestrângere a şurubului Fo1
trebuie să fie mai mare decât Fo1min. Din condiţiamenţinerii etanşeităţii îmbinării se ia:
10 1 FKF r , N (a)

236 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
unde:
rK - coeficient de siguranţă a prestrângerii:- pentru sarcini statistice: 225,1 rK ;- pentru sarcini variabile: 42 rK .
Pentru asigurarea condiţiilor de etanşare, lalimită, la încercarea hidraulică:
pho pD
F4
123
1
, N (b)
Se va adopta ca forţă de strângere iniţială Fo1,valoarea cea mai mare rezultată din relaţiile (a) şi(b).d) forţa totală pe un şurub:
111 zot FFF , N
25. Calculul forţelorce acţionează înasamblare latemperatura defuncţionare(TT0) (vezi fig.5.14.)
a) Dilatarea termică totală în asamblare (v. fig.5.13 şi relaţia 5.83), pentru cazul general:
sssfffccct tltltll 2
Pentru un caz particular (v. fig. 5.12, b, c): ss
tsfpp
tft tltlll 21 , mm
cu: ftf ; s
ts
ft şi st - v. relaţiile 5.85 şi 5.86:
cfcf tttt 0 , 0C
cscs tttt 0 , 0Ccu: cft şi cst - conform tabelului 5.4,
iar C20o0 t ,
sau: 0ttt ff
0ttt ss ;
unde: C1510 o fluidf tt
pentru C400300 ofluidt ;
C2015 o fluidf tt
pentru C500400 ofluidt ;

Capitolul 5. Calculul asamblărilor cu flanşe 237
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
C1510 o fs tt
pentru C400300 ofluidt ;
C2015 o fs tt
pentru C500400 ofluidt ;
iar C20o0 t , v. şi tabelul 5.4.
b) rigiditatea şurubului (v. relaţia 5.87):
sn
sn
s
s
s
sts
ts A
l
A
l
A
l
Ec...
11
2
2
1
1
cu aceiaşi observaţie ca la pct. 22, tabelul 5.7.
c) rigiditatea pachetului (flanşelor) (v. relaţiile5.88, 5.89 sau 5.90):
pntpn
pn
ptp
p
ptp
p
tp AE
l
AE
l
AE
l
c ...
1
22
2
11
1
sau:
2
2
4 gpi
pi
tpt
p dk
lS
l
Ec
sau:21 pp
ptpt
p ll
AEc
cu:
pA - conform relaţiei 5.78;tpiE - fig. 5.15;
Ap1, Ap2, Ap3, Dech1, Dech2, D1, S, , k, etc.conform pct. 23, tabelul 5.7.
d) forţa suplimentară pe un şurub la temperaturade funcţionare (v. relaţia 5.91 şi fig. 5.14):
111 FFcc
cF
tp
ts
tst
z
, N

238 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
e) forţa de strângere iniţială pe un şurub latemperatura de funcţionare (v. relaţia 5.93şi fig. 5.14):
tp
ts
tps
o
to
cc
lcc
F
F11
111
1
, N
f) forţa totală pe un şurub la temperatura defuncţionare (v. relaţia 5.92):
tz
to
tt FFF 111 , N
g) forţa remanentă de strângere a asamblării(garniturii) în exploatare la temperatura defuncţionare (v. relaţia 5.92):
111 FFF tt
tr , N
sau:
1111 FFFF tz
to
tr , N
26. Verificareaşurubului
a) la montaj ( 0pp şi 0TT ) (v. relaţiile 5.94,5.95 şi 5.100):
21
10
4
d
Fot
, MPa
16
2tg
31
221
0 d
dFo
t
, MPa
2020
20 3 asttech
b) în exploatare, la temperatura de funcţionare( 0pp şi 0TT ) (v. relaţia 5.106):
tas
ttt
tf d
F
21
14

Capitolul 5. Calculul asamblărilor cu flanşe 239
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
c) la încercarea hidraulică ( phpp şi 0TT ):
21
23
1 44
d
pD
F pho
tph
unde: 20as , t
as - v. tabelul 5.6;
2 - v. relaţia 5.98;2
2 arctgd
p
,
p - pasul filetului - v. anexa 1;d2 - diametrul mediu al filetului - v. anexa 1;
2cos
arctg 1
- v. relaţia 5.99
- v. tabelul 5.5;o60 pentru filetele metrice.
d) în perioada de încălzire (regim tranzitoriu):- se calculează tl (v. pct.25, tabelul 5.7) luând
cft şi cst , conform tabelului 5.4 corespunzătoareperioadei de încălzire;
- se calculează toF 1 , conform pct. 25, e, tabelul
5.7, cu tl corespunzătoare regimului tranzitoriu deîncălzire;
- se calculează forţa totală pe un şurub înperioada de încălzire, conform pct.25, f, tabelul 5.7.(observaţie: ct.1
tzF );
- se calculează tensiunea din şurub în regimtranzitoriu de încălzire, conform pct. 26 b, tabelul5.7.
27. Verificareagarniturii şietanşeităţii
a) la existenţa garniturii între flanşe, la montaj(v.relaţia 5.109):
distrugereo q
bD
Fzq
3
1
, MPa

240 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
unde:
minqkq gdistrugere , MPa
4...5,1gk
qmin - v. tabelul 5.2, în funcţie de tipul garniturii.b) în exploatare, atât la temperatura normală cât
şi la cea de funcţionare (v. relaţiile 5.110,5.111 şi 5.112):- pentru etanşări cu garnituri moi:
111 9,1...5,0şi FFF trr , N
- pentru etanşări cu garnituri metaliceprofilate:
111 9,2...2,1şi FFF trr , N
- pentru etanşări cu garnituri metalice platesau fără garnituri:
111 4,1...2,1şi FFF trr , N
28. Verificareaflanşelor (v. fig.5.4 şi 5.16)
a) Calculul momentului de încovoiere peunitatea de lungime pe diametrul mediu alţevii (v. relaţia 5.116):
20
01
00
221
1
25,42
03,12
p
pmm
pmp
mcD
SE
Sr
IE
lr
SrSE
rp
IE
lF
M
unde:
cD pD
F4
2 , N
pc - presiunea de calcul, MPa;
2202
1pSDD
l
, mm
12
32 hdzD
I g
, mm4
(v. relaţia 5.114)

Capitolul 5. Calculul asamblărilor cu flanşe 241
Tabelul 5.7 (continuare)Nr.crt.
Specificaţie Relaţii de calcul. Recomandări
20p
m
SDr
- pentru flanşe fără gât tronconic,
mm;
2m
m
SDr
- pentru flanşe cu gât tronconic, mm,
unde:2
10 ppm
SSS
, mm
z - numărul de şuruburi;dg - diametrul găurilor din flanşă pentru şuruburi,
mm;h - grosimea flanşei, mm.
b) tensiunea de încovoiere în peretele ţevii înzona de îmbinare cu flanşă (secţiunea LM -fig. 5.4 şi 5.16) (v. relaţia 5.117):
tr
p
iS
M 6,0
62
0
1LM
c) calculul momentului de încovoiere ceacţionează în secţiunea de încastrare a flanşei(secţiunea AB - fig. 5.4 şi 5.16) (v. relaţia5.118):
11 2 MrlFM mD , N mm
d) tensiunea de încovoiere în secţiunea AB deîncastrare a flanşei (v. relaţia 5.119):
tr
g
ihdzD
M
6,0
62
2AB
tr - rezistenţa de rupere a materialului
flanşei, cu considerarea temperaturii şi a durateide lucru.
În lipsa tr se poate considera t
c , tr 100000/
sau t100000/1 .

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI242
ANEXA 1
FILETE METRICE ISO DE UZ GENERAL(Extras din SR ISO 724: 1996)
Diametrulnominal alfiletului d
Pasul pDimensiuni nominale
D = d D2 = d2 D1 = d1
17,0 1,51
17.000 16,02616,350
15.37615,917
18,0
2,52
1,51
0,750,5
18,000
16,37616,70117,02617,35017,51317,675
15,29415,83516,37616,91717,18817,459
20,0
2,52
1,51
0,750,5
20,000
18,37618,70119,02619,35019,51319,675
17,29417,83518,37618,91719,18819,459
22,0
2,52
1,51
0,750,5
22,000
20,37620,70121,02621,35021,51321,675
19,29419,83520,37620,91721,18821,459
24,0
32
1,51
0,75
24,000
22,05122,70123,02623,35023,513
20,75221,83522,37622,91723,188

Anexa 1. Filete metrice ISO de uz general 243
Diametrulnominal alfiletului d
Pasul pDimensiuni nominale
D = d D2 = d2 D1 = d1
25,02
1,51
25,00023,70124,02624,350
22,83523,37623,917
26,0 1,5 26,000 25,026 24,376
27,0
32
1,51
0,75
27,000
25,05125,70126,02626,35026,513
23,75224,83525,37625,91726,188
28,02
1,51
28,00026,70127,02627,350
25,83526,37626,917
30,0
3,532
1,51
0,75
30,000
27,72728,05128,70129,02629,35029,513
26,21126,75227,83528,37628,91729,188
32,0 21,5
32,000 30,70131,026
29,83530,376
33,0
3,532
1,51
0,75
33,000
30,72731,05131,70132,02632,35032,513
29,21129,72530,83531,37631,91732,188
35,0 1,5 35,000 34,026 33,376
36,0
432
1,51
36,000
33,40234,05134,70135,02635,350
31,67032,75233,83534,37634,917
38,0 1,5 38,000 37,026 36,376
39,0
432
1,51
39,000
36,40237,05137,70138,02638,350
34,67035,75236,83537,37637,917
40,032
1,540,000
38,05138,70139,026
36,75237,83538,376

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI244
Diametrulnominal alfiletului d
Pasul pDimensiuni nominale
D = d D2 = d2 D1 = d1
42,0
4,5432
1,51
42,000
39,07739,40240,05140,70141,02641,350
37,12937,67038,75239,83540,37640,917
45,0
4,5432
1,51
45,000
42,07742,40243,05143,70144,02644,350
40,12940,67041,75241,83543,37643,917
48,0
5432
1,51
48,000
44,75245,40246,05146,70147,02647,350
42,58743,67044,75245,83546,37646,917
50,032
1,550,000
48,05148,70149,026
46,75247,83548,376
52,0
5432
1,51
52,000
48,75249,40250,05150,70151,02651,350
46,58747,67048,75249,83550,37650,917
55,0432
1,5
55,00052,40253,05153,70154,026
50,67051,75252,83553,376
56,0
5,5432
1,51
56,000
52,42853,40254,05154,70155,02655,350
50,04651,67052,75253,83554,37654,917
58,0432
1,5
58,00055,40256,05156,70157,026
53,67054,75255,83556,376

Anexa 1. Filete metrice ISO de uz general 245
Diametrulnominal alfiletului d
Pasul pDimensiuni nominale
D = d D2 = d2 D1 = d1
60,0
5,5432
1,51
60,000
56,42857,40258,05158,70159,02659,350
54,04655,67056,75257,83558,37658,917
62,0432
1,5
62,00059,40260,05160,70161,026
57,67058,75259,83560,376
64,0
6432
1,51
64,000
60,10361,40262,05162,70163,02663,350
57,50559,67060,75261,83562,37662,917
65,0432
1,5
65,00062,40263,05163,70164,026
60,67061,75262,83563,376
68,0
6432
1,51
68,000
64,10365,40266,05166,70167,02667,350
61,50563,67064,75265,83566,37666,917
70,0
6432
1,5
70,000
66,10367,40268,05168,70169,026
63,50565,67066,75267,83568,376
72,0
6432
1,51
72,000
68,10369,40270,05170,70171,02671,350
65,50567,67068,75269,83570,37670,917
75,0432
1,5
75,00072,40273,05173,70174,026
70,67071,75272,83573,376
Dimensiunile sunt date in mm

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI246
ANEXA 2
FILETE PĂTRATE
Elementele geometrice ale filetului se calculează cu relaţiile:pet 5,01 ;
apatt 5,01 ;
bpbtt 5,012 ;unde: b = 0,25 mm - pentru p 4 mm;
b = 0,50 mm - pentru 4 mm < p 12 mm;b = 1,00 mm - pentru p > 12 mm.
Diametrulnominal
d,mm
Pasulp,
mm
Diametrulmediu
d2 = D2,mm
Diametrulexterior
D,mm
Diametrulinteriord1 = D1,
mm10 2
39,0008,500
10,50010,500
8,0007,000
12 23
11,00010,500
12,50012,500
10,0009,000
14 23
13,00012,500
14,50014,500
12,00011,000
16 24
15,00014,000
16,50016,500
14,00012,000
18 24
17,00016,000
18,50018,500
16,00014,000
20 24
19,00018,000
20,50020,500
18,00016,000

Anexa 2. Filetul pătrat 247
Diametrulnominal
d,mm
Pasulp,
mm
Diametrulmediu
d2 = D2,mm
Diametrulexterior
D,mm
Diametrulinteriord1 = D1,
mm
22258
21,00019,50018,000
22,50022,50022,500
20,00017,00014,000
24258
23,00021,50020,000
24,50024,50024,500
22,00019,00016,000
26258
25,00023,50022,000
26,50024,00021,00018,000
28258
27,00025,50024,000
28,50026,00023,00020,000
303610
28,50027,00025,000
30,50027,00024,00020,000
323610
30,50029,00027,000
32,50029,00026,00022,000
363610
34,50033,00031,000
36,50033,00030,00026,000
403610
38,50037,00035,000
40,50037,00034,00030,000
443812
42,50040,00038,000
44,50041,00036,00032,000
483812
46,50044,00042,000
48,50045,00040,00036,000
503812
48,50046,00044,000
50,50047,00042,00038,000
523812
50,50048,00046,000
52,50049,00044,00040,000

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI248
Diametrulnominal
d,mm
Pasulp,
mm
Diametrulmediu
d2 = D2,mm
Diametrulexterior
D,mm
Diametrulinteriord1 = D1,
mm
553812
53,50051,00049,000
55,50052,00047,00043,000
603812
58,50056,00054,000
60,50057,00052,00048,000
6541016
63,00060,00057,000
65,50065,50066,000
61,00055,00049,000
7041016
68,00065,00062,000
70,50070,50071,000
66,00060,00054,000
7541016
73,00070,00067,000
75,50075,50076,000
71,00065,00059,000
8041016
78,00075,00072,000
80,50080,50081,000
76,00070,00064,000
8551220
82,50079,00075,000
85,50085,50086,000
80,00073,00065,000
9051220
87,50084,00080,000
90,50090,50091,000
85,00078,00070,000
9551220
92,50089,00085,000
95,50095,50096,000
90,00083,00075,000
10051220
97,50094,00090,000
100,000100,500101,000
95,00088,00080,000

Anexa 3. Filete metrice trapezoidale 249
ANEXA 3FILETE METRICE TRAPEZOIDALE ISO
(Extras SR ISO 2904: 1996)
Elementele şi dimensiunile profilului nominal al filetului exterior şial filetului interior sunt prezentate în fig. 1 şi tabelele 1 şi 2.
PH 5,01 ; d – diametrul nominal al filetului;
cc aPaHhH 5,0134 ; PdDd 5,022 ;
caz 25,0 ; caPdhdd 22 33 ;
caR 5,0max1 ; PdD 1 ;
caR max2 ; cadD 24 ;
ac – jocul la fundul filetului.
Tabelul 1P ac 34 hH R1max R2max
1,5 0,15 0,9 0,075 0,152345
0,251,251,752,252,75
0,125 0,25
67891012
0,5
3,54
4,55
5,56,5
0,25 0,5
14 1 8 0,5 1
Fig. 1

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI250
Tabelul 2Diametrulnominal d Pasul
p
Diametrulmediu
22 Dd
Diametrulexterior
D4
Diametrul interior
Şirul 1 Şirul 2 d3 D1
8 1,5 7,250 8,300 6,200 6,5009 1,5
28,2508,000
9,3009,500
7,2006,500
7,5007,000
10 1,52
9,2509,000
10,30010,500
8,2007,500
8,5008,000
11 23
10,0009,500
11,50011,500
8,5007,500
9,0008,000
12 23
10,00010,500
12,50012,500
9,5008,500
10,0009,000
14 23
13,00012,500
14,50014,500
11,50010,500
12,00011,000
16 24
15,00014,000
16,50016,500
13,50011,500
14,00012,000
18 24
17,00016,000
18,50018,500
15,50013,500
16,00014,000
20 24
19,00018,000
20,50020,500
17,50015,500
18,00016,000
22358
20,50019,50018,000
22,50022,50023,000
18,50016,50013,000
19,00017,00014,000
24358
22,50021,50020,000
24,50024,50025,000
20,50018,50015,000
21,00019,00016,000
26358
24,50023,50022,000
26,50026,50027,000
22,50020,50017,000
23,00021,00018,000
28358
26,50025,50024,000
28,50028,50029,000
24,50022,50019,000
25,00023,00020,000
303610
28,50027,00025,000
30,50031,00031,000
26,50023,00019,000
27,00024,00020,000
323610
30,50029,00027,000
32,50033,00033,000
28,50025,00021,000
29,00026,00022,000

Anexa 3. Filete metrice trapezoidale 251
Diametrulnominal d Pasul
p
Diametrulmediu
22 Dd
Diametrulexterior
D4
Diametrul interior
Şirul 1 Şirul 2 d3 D1
343610
32,50031,00029,000
34,50035,00035,000
30,50027,00023,000
31,00028,00024,000
363610
34,50033,00031,000
36,50037,00037,000
32,50029,00025,000
33,00030,00026,000
383710
36,50034,50033,000
38,50039,00039,000
34,50030,00027,000
35,00031,00028,000
403710
38,50036,50035,000
40,50041,00041,000
36,50032,00029,000
37,00033,00030,000
423710
40,50038,50037,000
42,50043,00043,000
38,50034,00031,000
39,00035,00032,000
443712
42,50040,50038,000
44,50045,00045,000
40,50036,00031,000
41,00037,00032,000
463812
44,50042,00040,000
46,50047,00047,000
42,50037,00033,000
43,00038,00034,000
483812
46,50044,00042,000
48,50049,00049,000
44,50039,00035,000
45,00040,00036,000
503812
48,50046,00044,000
50,50051,00051,000
46,50041,00037,000
47,00042,00038,000
523812
50,50048,00046,000
52,50053,00053,000
48,50043,00039,000
49,00044,00040,000
553914
53,50050,50048,000
55,50056,00057,000
51,50045,00039,000
52,00046,00041,000
603914
58,50055,50053,000
60,50061,00062,000
56,50050,00044,000
57,00051,00046,000

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI252
Diametrulnominal d Pasul
p
Diametrulmediu
22 Dd
Diametrulexterior
D4
Diametrul interior
Şirul 1 Şirul 2 d3 D1
6541016
63,00060,00057,000
65,50066,00067,000
60,50054,00047,000
61,00055,00049,000
7041016
68,00065,00062,000
70,50071,00072,000
65,50059,00052,000
66,00060,00054,000
7541016
73,00070,00067,000
75,50076,00077,000
70,50064,00057,000
71,00065,00059,000
8041016
78,00075,00072,000
80,50081,00082,000
75,50069,00062,000
76,00070,00064,000
8541218
83,00079,00076,000
85,50086,00087,000
80,50072,00065,000
81,00073,00067,000
9041218
88,00084,00081,000
90,50091,00092,000
85,50077,00070,000
86,00078,00072,000
9541218
93,00089,00086,000
95,50096,00097,000
90,50082,00075,000
91,00083,00077,000
10041220
98,00094,00090,000
100,500101,000102,000
95,50087,00078,000
96,00088,00080,000
Dimensiunile sunt date în mm

Anexa 4. Filete ferăstrău 253
ANEXA 4
FILETE FERĂSTRĂU(Extras STAS 2234/1-75 - Profile)
d = D = diametrul nominal al filetului PaHh e 36777,013
PdHdD 5,12 11 Pae 11777,0
PddD 75,022 Pa 1,0
33 2 hdd Pw 26384,0
PH 75,01 awe PR 12427,0
Tabelul 1P ae a e h3 R234
0,2360,3530,471
0,14140,1732
0,2
0,3860,6180,855
1,7362,6033,471
0,2490,3730,497
567
0,5890,7070,824
0,22360,24490,2646
1,0961,3381,582
4,3395,2076,074
0,6210,7460,870
8910
0,9421,0601,178
0,28280,3
0,3162
1,8282,0752,322
6,9427,8108,678
0,9941,1181,243
121416
1,4131,6491,884
0,34640,3742
0,4
2,8203,3203,821
10,41312,14913,884
1,4911,7401,988

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI254
Tabelul 1 (continuare)P ae a e h3 R182022
2,1202,3552,591
0,42430,44720,4690
4,3254,8305,335
15,62017,35519,091
2,2372,4852,734
242832
2.8263,2983,769
0,48990,52920,5657
5,8426,8587,877
20,82624,29827,769
2,9823,4803,977
364044
4,2404,7115,182
0,60,63250,6633
8,8989,92110,946
31,24034,71138,182
4,4744,9715,468
FILETE FERĂSTRĂU(Extras STAS 2234/2-75 - Dimensiuni nominale)
Tabelul 2Diametrul nominal
d = DPasP
Diametrulmediu
d2 = D2
Diametrul interior
Şirul 1 Şirul 2 Şirul 3 d3 D1
10 2 8,500 6,528 7,00012 2 10,500 8,528 9,000
3 9,750 6,791 7,50014 2 12,500 10,528 11,000
3 11,750 8,791 9,50016 2 14,500 12,528 13,000
4 13,000 9,058 10,00018 2 16,500 14,528 15,000
4 15,000 11,058 12,00020 2 18,500 16,528 17,000
4 17,000 13,058 14,000
223 19,750 16,791 17,5005 18,250 13,322 14,5008 16,000 8,166 10,000
243 21,750 18,794 19,5005 20,250 15,322 16,5008 18,000 10,166 12,000
263 23,750 20,791 21,5005 22,250 17,322 18,5008 20,000 12,166 14,000
283 25,750 22,791 23,5005 24,250 19,732 20,5008 22,000 14,166 16,000
303 27,750 24,791 25,5006 25,500 19,586 21,000
10 22,500 12,644 15,000

Anexa 4. Filete ferăstrău 255
Tabelul 2 (continuare)Diametrul nominal
d = DPasP
Diametrulmediu
d2 = D2
Diametrul interior
Şirul 1 Şirul 2 Şirul 3 d3 D1
323 29,750 26,791 27,5006 27,500 21,588 23,000
10 24,500 14,644 17,000
343 31,750 28,794 29,5006 29,500 23,586 25,000
10 26,500 16,644 19,000
363 33,750 30,794 31,5006 31,500 25,586 27,000
10 28,500 18,644 21,000
383 35,750 32,794 33,5007 32,750 25,852 27,500
10 30,500 20,644 23,000
403 37,750 34,794 35,5007 34,750 27,852 29,500
10 32,500 22,644 25,000
423 39,750 36,794 37,5007 36,750 29,852 31,500
10 31,500 24,644 27,000
443 41,750 38,794 39,5007 38,750 31,852 33,500
12 35,000 23,174 26,000
463 43,750 40,794 41,5008 40,000 32,116 34,000
12 37,000 25,174 28,000
483 45,750 42,794 43,5008 42,000 34,116 36,000
12 39,000 27,174 30,000
503 47,750 44,794 45,5008 44,000 36,116 38,000
12 41,000 29,174 32,000
523 49,750 46,794 47,5008 46,000 38,116 40,000
12 43,000 31,174 34,000
553 52,750 49,794 50,5009 48,250 39,380 41,500
14 44,500 30,702 34,000
603 57,750 54,794 55,5009 53,250 44,380 46,500
14 49,500 35,702 39,000
654 62,000 58,058 59,000
10 57,500 47,644 50,00016 53,000 37,232 41,000

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI256
Tabelul 2 (continuare)Diametrul nominal
d = DPasP
Diametrulmediu
d2 = D2
Diametrul interior
Şirul 1 Şirul 2 Şirul 3 d3 D1
704 67,000 63,058 64,000
10 62,500 52,644 55,00016 58,000 42,232 46,000
754 72,000 68,058 69,000
10 67,500 57,644 60,00016 63,000 47,232 51,000
804 77,000 73,058 74,000
10 72,500 62,644 65,00016 68,000 52,232 56,000
854 82,000 78,058 79,000
12 76,000 64,174 67,00018 71,500 53,760 58,000
904 87,000 83,058 84,000
12 81,000 69,174 72,00018 76,500 58,760 63,000
954 92,000 88,058 89,000
12 86,000 74,174 77,00018 81,500 63,760 69,000
1004 97,000 93,058 94,000
12 91,000 79,174 82,00020 85,000 65,290 70,000
1054 102,000 98,058 99,000
12 96,000 84,174 87,00020 90,000 70,290 75,000
1104 107,000 103,058 104,000
12 101,000 89,174 92,00020 95,000 72,290 80,000
1156 110,500 104,586 106,000
14 104,500 90,702 94,00022 98,500 76,818 82,000
1206 115,500 109,586 111,000
14 109,500 95,702 99,00022 103,500 81,818 87,000
1256 120,500 114,586 116,000
14 114,500 100,702 104,00022 108,500 86,818 92,000
1306 125,500 119,586 121,000
14 119,500 105,702 109,00022 113,500 91,818 97,000
1356 130,500 124,586 126,000
14 124,500 110,702 114,00024 117,000 93,348 99,000

Anexa 4. Filete ferăstrău 257
Tabelul 2 (continuare)Diametrul nominal
d = DPasP
Diametrulmediu
d2 = D2
Diametrul interior
Şirul 1 Şirul 2 Şirul 3 d3 D1
1406 135,500 129,586 131,000
14 129,500 115,702 119,00024 122,000 98,348 104,000
1456 140,500 134,586 136,000
14 134,500 120,702 124,00024 127,000 103,348 109,000
1506 145,500 139,586 141,000
16 138,000 122,232 126,00024 132,000 108,348 114,000
1556 150,500 144,586 116,000
16 143,000 127,232 131,00024 137,000 113,348 119,000
1606 155,500 149,586 131,000
16 148,000 132,232 136,00028 139,000 111,404 118,000
1656 160,500 154,586 156,000
16 153,000 137,232 141,00028 144,000 116,404 123,000
1706 165,500 159,586 161,000
16 158,000 142,232 146,00028 149,000 221,404 128,000
175 8 169,000 161,116 163,00016 163,000 147,232 151,00028 154,000 226,404 133,000
1. NOTAREA FILETELOR FERĂSTRĂU1.1. Notarea filetelor ferăstrău se face conform următoarelor reguli:1.1.1. Filetul ferăstrău cu un singur început se notează prin simbolul S,urmat de valoarea diametrului nominal şi a pasului, exprimate în milimetrişi separate prin simbolul x. Exemplu: S 40 x 71.1.2. Filetul ferăstrău cu mai multe începuturi se notează prin simbolul S,urmat de valoarea diametrului nominal şi a pasului elicei, separate desimbolul x, după care se indică simbolul P şi valoarea pasului.
Exemplu: S 40 x 14 P71.1.3. Sensul filetului, numai la filetele stânga se indică prin literele stg.amplasate după notarea filetului conform pct. 1.1.1. sau 1.1.2.
Exemplu: S 40 x 14 P7 stg1.1.4. Notarea completă a filetului, incluzând şi notarea câmpului detolerantă se face conform STAS 2234/3-75.
Exemplu: S 40 x 14 P7 stg - 7e

TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI258
ANEXA 5FILETE ROTUNDE
(Extras STAS 668-86)Elementele geometrice ale filetului se calculeaza cu relatiile:
pt 866,1 ; pt 0835,02 ; pb 683,0 ; pr 255579,01 ;
pt 5,01 ; pa 05,0 ; pr 2385,0 ; pr 221,01 .
Diametrulnominald*, mm
Numărulde paşi de25,4 mm
Pasulp,
mm
d2 = D2,mm
D4,mm
d3,mm
D1,mm
81012162024283236404448526065707580859095100
1010108888886666666666666
2,5402,5402,5403,1753,1753,1753,1753,1753,1754,2334,2334,2334,2334,2334,2334,2334,2334,2334,2334,2334,2334,233
6,7308,73010,73014,41218,41222,41226,41230,41234,41237,88341,88345,88349,88357,88362,88367,88372,88377,88382,88387,88392,88397,883
8,25410,25412,25416,31820,31824,31828,31832,31836,31840,42344,42348,42352,42360,42365,42370,42375,42380,42385,42390,42395,423100,423
5,4607,4609,46012,82516,82520,82524,82528,82532,82535,76739,76743,76747,76755,76760,76765,76770,76775,76780,76785,76790,76795,767
5,7147,7149,71413,14217,14221,14225,14229,14233,14236,19040,19044,19048,19056,19061,19066,19071,19076,19081,19086,19091,19096,190
* numai diametrele preferenţiale.

Bibliografie 259
BIBLIOGRAFIE
[1] Alexandrescu, F., ş.a., „Conducte şi armături”, Editura Tehnică,Bucureşti, 1963.
[2] Beleaev, V.G., „Vâbor i rascet optimalinoi formî profileavintovâh poverhnosti saricovâh mehanizmov”, Vestnik Maşinostroenie, 2(1975), 54-55.
[3] Birger, I.A., ş.a., „Rascet na procinosti detalei maşin”,Spovocinik, Izd. Maşinostoenie, Moskva, 1979.
[4] Blume, D. Ilgner, H.H., "Schrauben Vademecum", 8. Auflage,1991.
[5] Cernavski, S.A., i.d., „Proektirovanie mehaniceskih peredaci”,Izd. Maşinostoenie, Moskva, 1976.
[6] Chişiu, Al. ş.a., "Organe de maşini", Editura Didactică şiPedagogică, Bucureşti, 1981.
[7] Crudu, I, "Organe de maşini. Asamblări demontabile şinedemontabile", Editura Universităţii din Galaţi, 1988.
[8] Crudu, I., "Bazele proiectării organelor de maşini", Editura Alma,Galaţi, 2000.
[9] Crudu, I., Fiabilitatea şi calitatea sistemelor mecanice", EdituraF & F International, Gheorgheni, 2003.
[10] Decker, K.H., "Maschinenelemente", Carl Hanser Verlag,München,Wien,1985.
[11] Drăghici, I., ş.a., „Îndrumar de proiectare în construcţia demaşini”, vol. I, Editura Tehnică, Bucureşti, 1981.
[12] Gafiţanu, M., ş.a., „Organe de maşini”, vol. I, Editura Tehnică,Bucureşti, 1981.
[13] Gafiţanu, M., ş.a., „Organe de maşini”, vol. I, Editura Tehnică,Bucureşti, 1999.
[14] Hütte, vol I, Editura Tehnică, Bucureşti, 1995.[15] Jâşcanu, M., ş.a., „Şuruburi de mişcare”, Lito. Universitatea
„Dunărea de jos” din Galaţi, 1980.[16] Jula, A., ş.a., „Organe de maşini. Îndrumar pentru proiectul de
an nr. 1”, Universitatea din Braşov, 1976.[17] Jula, A., ş.a., „Mecanisme şurub-piuliţă. Îndrumar de
proiectare”, Editura Lux Libris, Braşov, 2000.

260 TRANSMISII ŞI ASAMBLĂRI CU ŞURUBURI
[18] Köhler/Rögnitz, "Maschinenteile" Teil I, II, B.G. Teubner,Stuttgart, 1979.
[19] Kuzmin, A.V., i.d., „Kursovoe proektirovanie detalei maşin”,Ciasti 2, Sprovocinosti Sposobie, Izd. Vâsşaia Şkola, Minsk, 1982.
[20] Levit, G.A., „Rascet poredaci vint-gaika kacenia (şaricovâh),Stanki i instrument”, 5 (1963), 8-15.
[21] Manea, Gh., "Organe de maşini", vol I, Editura Tehnică,Bucureşti, 1970.
[22] Matek, W., u.a., "Maschinenelemente", Vieweg & SohnVerlagsgesellschaft mbH, Braunschweig/Wiesbaden, 2000.
[23] Mustafa, M.R., ş.a., „Asamblări filetate şi prin strângere”,Editura Tehnică, Bucureşti, 1964.
[24] Mădăraş, L., ş.a., "Design. Îmbinări. Arcuri" , EdituraPolitahnica, Timişoara, 2002.
[25] Mătieşan, D., ş.a., „Elemente de proiectare pentru mecanismelecu şurub şi piuliţă”, Institutul Politehnic Cluj-Napoca, 1985.
[26] Pavlov, S.I., „Sarikovintovâe mehanizmî i priborostroenîe”, Izd.Masinostroenie, Moskva, 1968.
[27] Reşetov, D.N., „Detali i mehanizmâ metalorezuşcih stankov”,Izd. Maşinostoenie, Moskva, 1972.
[28] Ştefănescu, I.I., ş.a., „Recipiente sub presiune în construcţiesudată. Îndrumar de proiectare”, Lito. Universitatea „Dunărea de Jos” dinGalaţi, 1991.
[29] Ştefănescu, I.I., ş.a., „Materiale utilizate în construcţia demaşini. Caracteristici. Simbolizare. Domenii de utilizare”, Lito.Universitatea "Dunărea de jos"Galaţii, Vol. I - 1994, Vol II - 1997.
[30] Ştefănescu, I.I., Spânu, C., „Asamblări cu flanşe”, EdituraEvrika, Brăila, 1999.
[31] * * * Manualul inginerului mecanic, Editura Tehnică,Bucureşti, 1974.
[32] * * * Catalog General de organe de asamblare, Nr. 07195/A,Editura Publimpress, Bucureşti, 1995.
[33] * * * Catalog general de rulmenţi, Nr. 7195, EdituraPublimpress, Bucureşti, 1995.
[34] * * * "Prescripţii tehnice pentru proiectarea, execuţia,instalarea, exploatarea, repararea şi verificarea recipientelor metalice stabilesub presiune ISCIR C4-83", Editura Tehnică, Bucureşti, 1985.
[35] * * * "Prescripţii tehnice pentru proiectarea, montarea,repararea, exploatarea şi verificarea conductelor de abur şi apă fierbinte subpresiune ISCIR, C15-85", Editura Tehnică, Bucureşti, 1985.






























