Embed Size (px)
Citation preview

Hindawi Publishing CorporationInternational Journal of Distributed Sensor NetworksVolume 2013 Article ID 268942 13 pageshttpdxdoiorg1011552013268942
Research ArticleAnt-Based Swarm Algorithm for Charging Coordination ofElectric Vehicles
Shaolun Xu1 Donghan Feng1 Zheng Yan1 Liang Zhang1 Naihu Li2
Lei Jing2 and Jianhui Wang3
1 Key Laboratory of Control of Power Transmission and Conversion of Ministry of EducationShanghai 200240 China
2 Alstom Grid Technology Center Co Ltd Shanghai 200240 China3 Argonne National Laboratory Decision and Information Sciences Division Argonne IL 60439 USA
Correspondence should be addressed to Donghan Feng seedsjtueducn
Received 25 January 2013 Revised 7 April 2013 Accepted 7 April 2013
Academic Editor Shuai Li
Copyright copy 2013 Shaolun Xu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Uncontrolled charging of large-scale electric vehicles (EVs) can affect the safe and economic operation of power systems especiallyat the distribution level The centralized EVs charging optimization methods require complete information of physical appliancesand using habits which will cause problems of high dimensionality and communication block Given this an ant-based swarmalgorithm (ASA) is proposed to realize the EVs charging coordination at the transformer level which can overcome the drawbacksof centralized control method First the EV charging load model is developed and the charging management structure based onswarm intelligence is presented Second basic data of the EV using habit is sampled by the Monte Carlo method and the ASAis applied to realize the load valley filling The load fluctuation and the transformer capacity are also considered in the algorithmFinally the charging coordination of 500 EVs under a 1247KV transformer is simulated to demonstrate the validity of the proposedmethod
1 Introduction
As a new effective means of alleviating the energy crisisreducing environmental pollution and global warming EVshave more incomparable advantages than conventional carsand become the focus of governments automakers andenergy companies now [1 2] The EV development strategyresearch report accomplished by the Ministry of Industryand Information Technology of China predicted that therewill be 60 million EVs in 2030 in China
If widely used EVswill aggregately contribute a new largeload to the power grid Large-scale integration of EVs willpose new challenges to the safe and economic operation ofthe power system [3ndash6] Charging load may further increasethe peak load Grid congestion network losses and powerquality may be worsening In overall the randomness of EVsrsquocharging activities in time and space brings uncertainty andrisk to the power system operation If appropriate chargingstrategies are adopted EVs can be used for the load valley
filling congestion management and other ancillary servicesfor power systems
Most distributed energy resources such as small windturbines and roof-top photovoltaic panels have the charac-teristics of random and intermittent It is very difficult todispatch the traditional generators to balance their powerIf appropriate charging strategies are adopted EVs can alsobe used to improve the performance of distributed energyresources So it is very important to do some deep research onthe EV charging model and the charging control algorithm
Smart grid revolutionizes the current electric powerinfrastructure by integrating with advanced communicationand information technologies which can provide efficientreliable and safe energy automation service with two-waycommunication and power flows [7] Recently wirelesssensor networks (WSNs) which are suitable for the com-munication among EVs have gained great attention fromthe research community in various smart grid applicationsincluding advanced metering infrastructure (AMI) power
2 International Journal of Distributed Sensor Networks
outage detection distribution automation towers and polesmonitoring line fault diagnostics power fraud detectionand underground cable system monitoring [8] EVs can becharged smartly at home work place and public chargingstations based on the smart grid technologies with ubiquitouscommunication described previously
Most current research and applications on chargingmanagement are based on direct centralized and hierarchicalcentralized methods Swarm intelligence realizes the overallintelligence by the simple interaction between the agents andis very suitable for the distributed complex adaptive system(CAS) The power distribution system integrated with largescale of EVs is a CAS in fact So the decentralized swarmintelligence technique is an ideal managementcoordinationsolution for EV charging which is more flexible and adaptivethan the top-down centralized or hierarchical control Theproposed charging coordination method in this paper is adecentralized swarm algorithm
The remainder of this paper is organized as followsSection 2 reviews some literatures about EV charging man-agement Section 3 analyzes the influence factors of the EVcharging management Section 4 formulates the details ofEV charging model and develops a decentralized swarmalgorithm for charging coordination Section 5 tests theproposed algorithm by a case study of coordinative charging500 EVs under a 1247 KV transformer Section 6 concludesthis paper
2 Related Works
Recently many research efforts and studies about the EVcharging dispatch have been reported in some literatures[9ndash16] In general the content of the related literaturesmainly includes three parts the charging model chargingmanagement structure and charging strategy
In [9] the battery charging and dischargingmodel is builtin MATLAB and the influence to the distribution powersystem of the EV at the different charging strategy accordingto the load curve of spring andwinter is evaluatedThen somedemand response management methods such as staggercharge and custom load control are proposed to solve thepeak load problem caused by the EV tomake the distributionpower system more safe and efficient
In [10] a comparative study is made by simulatingfour EV charging scenarios that is uncontrolled domesticcharging uncontrolled off-peak domestic charging smartdomestic charging and uncontrolled public charging all ofthem take into account the expected future changes to theelectricity tariffs in the electricity market and appropriateregulation of EVs battery charging loads
In [11] the impacts of large-scale EVs deployment onthe particular networks are simulated and the results showthat it will lead to a variety of undesired effects such as assetoverloading and excessively low voltages Then a distributedhierarchical demand management scheme is integrated intoeach distribution network and proves to mitigate the unde-sired effects
In [12] an intelligent method is presented to minimizethe charging cost considering the acceptable charging powerof EV battery and the state of charge (SOC) in response totime-of-use (TOU) price in a regulated market The opti-mized charging model proposed explores the local optimalEV charging strategy successfully but fails to consider thenetwork impacts
In [13] a decentralized multiagent system (MAS) isproposed and a hybrid algorithm combined with an evolu-tionary algorithm and a linear programming was developedto manage a power distribution system with EVs
In [14] an intelligent decentralized multi-agent EVcharging control method based on TOU price scheme con-sidering network losses further is proposed The simulationresults show that the proposed approach can realize theeffective valley filling and provides results of similar qualitycompared to the centralized approach with limited computerresources and communication resources
In the related literature there are also several studies onswarm intelligence of ants which simulate insect behaviorof ants It is suitable for the distributed circumstances andhas been widely applied to the solution of TSP productionscheduling WSN routing and other complex optimizationproblems [15 16] But seldom literatures have been foundthat using the swarm intelligence of ants to manage the EVscharging which is what we will do in this paper
3 EV Charging Influence Factor andManagement Structure
31 EV Charging Influence Factor The basis of the researchof EV charging algorithm is to build appropriate EV loadmodel First we need to analyze the key influence factor ofthe EV charging to get better forecast and control of the EVload which mainly include the physical characteristics of EVcharging and EV using habit311 Physical Characteristics The physical characteristicsmainly include the EV type battery capacity and chargingpower
(1) EV Type In this paper EV type means the purpose of thecar mainly including private car and public service car suchas bus and taxi Different types of EV have different batterycapacity and charging power
The public service carsrsquo daily travel miles are longer thanprivate cars and charging one time per day cannot satisfytheir actual need So they need the method of fast chargingor battery replacement
The private cars are flexible to use and they are in stopstatus in 90 percent time of one day which is very convenientfor the charging In the future the private cars will be themain part of the EVs And there are some official surveydata about the national household travel of the United Stateswhich is about the private cars and can be used as the basisof the simulation So in this paper we mainly consider thecharging of private cars(2) Battery Capacity Generally the main battery capacityof the private cars is more than 16Kwh For example the
International Journal of Distributed Sensor Networks 3
Chevrolet VOLT is 16 Kwh the Japan LEAF is 24Kwh theHonda Fit is 20Kwh and the Ford Focus is 23 Kwh Thebattery capacity decides the limited mileage of the EV(3) Charging Power In the ordinary charge mode the charg-ing power per hour is 02 C and the charging time is 5 hoursIn the fast charge mode the charging power per hour is 1 Cor 2 C and the charging time is 1 hour or half an hour
Table 1 listed the main parameters of the slow charge andfast charge
312 UsingHabits Theusing habitsmainly include the traveltime travel miles charging place and charging time Theuserrsquos drive and travel habits are also important to the EVcharging Most of the researches neglect the statistic of dailytravel miles and only assume the basic information of SOCstart charging time and so forth which is differ from thereality
The Federal Highway Administration of the Departmentof Transportation of the United States made a survey aboutthe national household travel survey in 2009 and released theresult [17] According to the maximum likelihood estimationmethod the end time and the start time of the trip can beexpressed as the normal distribution approximately (Figure 1)[18] And the daily travel miles can be expressed as thelognormal distribution approximately (Figure 2) [10]
(1) Start and End Charge Time Probability Model Theirprobability density function is listed as follows
119891119904(119909) =
1
radic2120587120590119904
exp(minus(119909 + 24 minus 120583
119904)2
21205902119904
)
0 lt 119909 le 120583119904minus 12
1
radic2120587120590119904
exp(minus(119909 minus 120583
119904)2
21205902119904
)
120583119904minus 12 lt 119909 le 24
(1)
where 120583119904= 1747 120590
119904= 341
119891119890(119909) =
1
radic2120587120590119890
exp(minus(119909 minus 120583
119890)2
21205902119890
)
0 lt 119909 le 120583119890+ 12
1
radic2120587120590119890
exp(minus(119909 minus 24 minus 120583
119890)2
21205902119890
)
120583119890+ 12 lt 119909 le 24
(2)
where 120583119890= 892 120590
119890= 324
Table 1 Comparison of different charging modes of EVs
Charging mode Slow charge Fast chargeTimeh 5sim10 12sim1CurrentA 15 150sim400VoltageV 220 220Applicable location Home Charging station
0
20
40
60
80
100
120
140
EV n
umbe
r
8 10 12 14 16 18 20 22 24
0
002
004
006
008
01
012
(h)
Den
sity
Frequency histogram and normaldistribution density function
Figure 1 Frequency histogram and normal distribution densityfunction of the start charge time of EVs
(2) Daily Travel Miles Probability Model One has
119891119898
(119909) =1
radic2120587120590119898119909exp(minus
(ln119909 minus 120583119898)2
21205902119898
) (3)
where 120583119898
= 298 120590119898
= 114
32 EV Charging Management Structure There are severalmanagement structures of efficient EV charging in recentliteratures and the representative structures include thecentralized control hierarchical control and decentralizedcontrol
321 Centralized Control A lot of literatures use the verticaldispatch scheme which is very common in the power systemcontrol to realize the management of the EVs charging
Although the centralized dispatch scheme is conducive toget the global optimal solution in theory it is very hard toimplement in the power systemwith large-scale EVs using thetechnologies of today For example EVs will add too manyvariables to the central optimization problem which willlead to the high dimensionality and centralized managementneeds high computation and communication resources todeal with large amount of information
322 Hierarchical Control Some literatures use the hierar-chical scheme to resolve the problem of the pure centralizedcontrol The core idea is to divide the power system intotwo layers or three layers according to the voltage level anddivide the distribution system into many zones The EVsdispatching problem is divided into the transmission systemand several distribution system dispatching problems in this
4 International Journal of Distributed Sensor Networks
0
50
100
150
200
250
300
EV n
umbe
r
0 20 40 60 80 100 120 140 160 180 2000
0005
001
0015
002
0025
003
0035
(km)
Den
sity
Frequency histogram and lognormaldistribution density function
Figure 2 Frequency histogram and lognormal distribution densityfunction of the daily travel miles of EVs
schemeThis scheme can alleviate the pressure of the dispatchcenter of the transmission to a certain extent
323 Decentralized Control In this scheme EVs are char-acterized as agents with a certain level of autonomy takingdecisions based on their local and global environment Localenvironment includes EV ownerrsquos preferences and charginginfrastructure parameters while the global environmentincludes the transmissiondistribution network conditionsand energy market conditions
4 Swarm Intelligence and Ant-BasedCharging Coordination Algorithm
41 Swarm Intelligence Swarm intelligence stemmed fromthe mimic of the living colony such as ant bird and fishin nature which shows unparalleled excellence in swarmthan in single in food seeking or nest building Drawinginspiration from this researches design many algorithmssimulating colony living such as ant colony algorithmparticle swarm optimization algorithm artificial bee colonyalgorithm and artificial fish colony algorithm which showsexcellent performance in dealing with complex optimizationproblems [19]
Swarm intelligence has the ability tomanage complex sys-tems of interacting individuals through minimal communi-cationwith only local neighbors to produce a global behaviorwhich typically do not follow commands from a centralizedleader [20] These special features make swarm intelligenceplay important roles in many engineering applications suchas multirobot system control massive distributed sensingusing wireless sensor networks vehicles dispatch and powersystem optimization
42 Ant-Based Charging Coordination Algorithm Becauseof the high dimensionality and communication demand ofthe centralized control new methods such as the artificialswarm intelligence are worthy of exploring for the solutionof charging coordination of large-scale EVs Next we will usethe ASA to realize the valley filling at the transformer level
Control center
HVMV Substation
TransformerMVLV TransformerMVLV
Electric vehicle swarm under LV transformer
Subsidiaryswarm 1
Subsidiaryswarm 1
Subsidiaryswarm 119899
Subsidiaryswarm 119899
Figure 3 EVs swarm coordinated charging structure
Table 2 Notation description
Notation Description119864119894BC Battery capacity of the EV 119894
119875119894RC Rated charging power of the EV 119894
119864119894SOC119904 Start state of charge (SOC) of the EV 119894
119864119894SOC119890 End state of charge (SOC) of the EV 119894
119864119894SOC119903 Real state of charge (SOC) of the EV 119894
120578119894CH Charging efficiency of the charging device for the EV 119894
119879119894PI Plug-in grid time of the EV 119894 when going back to home
119879119894PO Plug-off grid time of the EV 119894 when leaving home
119872119894PD Daily travel miles of the EV 119894
119864119894119875100
Energy need when the EV 119894 travels 100 kilometers119879119894CH Real charge time of the EV 119894
119875119894MTF Maximum load power of the transformer EV 119894 plug in
119864119894ℎCH Charging energy of the EV 119894 at the time ℎ
119871ℎ119865
Forecast load of the transformer at the time ℎ
119871ℎ119877
Real load of the transformer at the time ℎ(not including the EV load)
119871ℎ119879119864
Total load of the transformer at the time ℎ with the EVload
120591119894ℎCH
Pheromone used to guide the charging of the EV 119894 atthe time ℎ
119875MV Maximum EV charging valley power of the day before
421 Single EV Charging Model
(1) Variables and Parameters Table 2 listed the main EVcharging variables and parameters considered in this paper
International Journal of Distributed Sensor Networks 5
Start
Set EV parameters
Initialize pheromone
Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1
Ant 119870 = 119870 + 1
Find suitable charging time segment
Get charging schedule of each EV
Modify EV charging status
Pheromone update
End
N
N
N
Y
Y
119871ℎTE le 119875119894MTF
119870 ge 119872
119873119888 ge 119873119888 max
Figure 4 Ant-based charging planning algorithm flow
For the 119894th EV the charging time can be calculated asfollows
119879119894CH =
(119864119894SOC119890 minus 119864
119894SOC119904) 119864119894BC
119875119894RC120578119894CH
(4)
119864119894SOC119904 = 119864
119894SOC119903 minus119872119894PD119864119894119875100
100119864119894BC
(5)
(2) Charging ConstraintsThe charging constraints of a singleEV mainly include the SOC constraint the charging timeconstraint and the transformer capacity constraint
The SOC constraint is defined by
119864119894SOC119903 ge 119864
119894SOC119890 (6)
The charging time constraint is defined by
119879119894CH le 119879
119894PO minus 119879119894PI (7)
Considering the upper limit of the transformer capacitythe total load with the 119894th EV at the time ℎ should not exceedthe maximum load power of the transformer The capacityconstraint is defined by
119871ℎ119877
+ sum119905=ℎ
119864119894ℎCH lt 119875
119894MTF (8)
422 Ant-Based EV Charging Swarm Structure After carefulinvestigation and analysis the idea ofmultirobot cooperationbased on ant colony algorithm can be applied into the EVswarm intelligent charging control [21 22] Each EV is anant of the whole charging system and it can communicatewith others to exchange the key information to realize thecooperated control of the charging
The cooperation methods of multirobot system includethe centralized control distributed control and the hybrid
6 International Journal of Distributed Sensor Networks
control which integrate the first two methods effectively andare used extensively now Based on this and integrating thecentralized control hierarchical control and decentralizedcontrol methods of EV charging illustrated in many liter-atures a hybrid control structure is proposed as shown inFigure 3
It includes four layers typically (maybe more accordingto the system scale) which is the control center substationtransformer and EVs in turn The first three layers areusing the traditional centralized control structure from topto down which is widely used in the power grid now Thethird layer only controls the fourth layer partly and thefourth layer uses the distributed control structure The EVscan exchange information with others to make a decisionindependently which can get not only the flexibility but alsothe adaptability Generally the EVs in one line can form adynamic union which can be called a subsidiary swarm torealize the coordinated charging with others
The communication is the basis of the informationshare and task cooperate between EVs and mainly includesthe point-to-point communication broadcast and groupcommunication Wireless communication such as WSNs issuitable for the communication of ant-based swarm chargingsystem because of its distributed characteristic
423 Ant-Based EV Charging Algorithm
(1) Ant Colony Algorithm Used in Multirobot CollaborationAnt colony algorithm (ACA) is a simulation of antrsquos swarmintelligent behavior in food seeking where ants transmitmessages to each other by releasing pheromone and canalways find a shortest routing path form their nest to foodsource by swarm cooperation ACA was first presentedcombining with TSP problem by Dorigo et al in 1996 [23]Then it was successfully applied in TSP assignment prob-lem job shop scheduling network route design multirobotcollaboration and so forth which shows its advantages incomplex optimization problem especially the discrete ones
The multirobot system is a distributed system and theadvantage of it is that a robot can either work alone orcooperate with others The relationships among the robotsare equalityThe robot can exchange information with othersthrough communication and can make a decision inde-pendently Different tasks were given different quantity ofpheromone in the ACA used in multirobot system whichwas used to attract the robots to choose which task shouldbe accomplished with priority The more difficult tasks willpossess higher pheromone amount than the easier ones sothat the robots will choose to participate in the difficult taskswith priority
(2)The Suggested Charging Planning Algorithm In this paperan improved algorithm based on the ACA used inmultirobotcollaboration is implemented to solve the EVs chargingschedule problem according to the day-ahead load forecastdata of the transformer In this algorithm the load valleyfilling of different valley time segments is the tasks of the ants
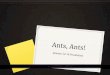
The ant-based charging plan algorithm (Figure 4) mainlyincludes these steps as follows
Step 1 Setting up the EVsrsquo parameters Including the EVnumber (ant population) the use habit of EV such as theplug-in and plug-off grid time (can help to get the usablecharging time assume that the car plug-in the grid whencomes home and plug-off the grid when leaves home) thedaily travel miles and the energy need when traveling 100 KM(can help to compute the SOC of the battery) the chargingefficiency the rated charging power and so forth
Step 2 Initializing the pheromone Compute the pheromoneaccording to the day-ahead load forecast data of the trans-former and other parameters using (9)
Step 3 Setting up the maximum iterations 119873119888max and the
ant numbers 119872 of each iteration The fluctuation of the loadcurve is related to the 119872 tightly
Step 4 Loop for iterating in turn of the plug-in time of theEVs Each ant decides the suitable charging time segmentaccording to its parameters and the pheromone of other antsis released
Step 5 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 6 Update the pheromone at the charging time segmentfor other EVs to use
Step 7 Generate the charging scheduling of all EVs
The charging planning pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
119870119897
119871ℎTE
(1 le ℎ lt 1199051 1199052 lt ℎ le 24)
119870ℎ
ℎ+
119870119897
119871ℎTE
(1199051 le ℎ lt 1199052 119871ℎfc le 119875MV)
0 (1199051 le ℎ lt 1199052 119871ℎfc gt 119875MV)
0 (ℎ lt 119879119894PI ℎ gt 119879
119894PO)
(9)
where 1199051 and 1199052 are the intersection of load forecast curveand maximum valley power line of EV charging And theycan be calculated from 119875MV and 119871
ℎ119865 119870119897and 119870
ℎare the
main influence factors of the pheromone and can be adjustedaccording to the coordination object
(3)The Feasibility Analysis of Proposed Algorithm Each EV isa relative independent individual in this algorithm which isan ant in fact The global optimization objects are the sumof all individualsrsquo optimization value So the proof of thealgorithm feasibility is to prove that each EV can reach theoptimal value when it plug in the grid
Assume that 119864(119873) is the sets of all EVs as follows
119864 (119873) = 119890 = (1198901 1198902 119890
119873) 119890119894isin 119864 (119894 le 119873) (10)
International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Distributed Sensor Networks
outage detection distribution automation towers and polesmonitoring line fault diagnostics power fraud detectionand underground cable system monitoring [8] EVs can becharged smartly at home work place and public chargingstations based on the smart grid technologies with ubiquitouscommunication described previously
Most current research and applications on chargingmanagement are based on direct centralized and hierarchicalcentralized methods Swarm intelligence realizes the overallintelligence by the simple interaction between the agents andis very suitable for the distributed complex adaptive system(CAS) The power distribution system integrated with largescale of EVs is a CAS in fact So the decentralized swarmintelligence technique is an ideal managementcoordinationsolution for EV charging which is more flexible and adaptivethan the top-down centralized or hierarchical control Theproposed charging coordination method in this paper is adecentralized swarm algorithm
The remainder of this paper is organized as followsSection 2 reviews some literatures about EV charging man-agement Section 3 analyzes the influence factors of the EVcharging management Section 4 formulates the details ofEV charging model and develops a decentralized swarmalgorithm for charging coordination Section 5 tests theproposed algorithm by a case study of coordinative charging500 EVs under a 1247 KV transformer Section 6 concludesthis paper
2 Related Works
Recently many research efforts and studies about the EVcharging dispatch have been reported in some literatures[9ndash16] In general the content of the related literaturesmainly includes three parts the charging model chargingmanagement structure and charging strategy
In [9] the battery charging and dischargingmodel is builtin MATLAB and the influence to the distribution powersystem of the EV at the different charging strategy accordingto the load curve of spring andwinter is evaluatedThen somedemand response management methods such as staggercharge and custom load control are proposed to solve thepeak load problem caused by the EV tomake the distributionpower system more safe and efficient
In [10] a comparative study is made by simulatingfour EV charging scenarios that is uncontrolled domesticcharging uncontrolled off-peak domestic charging smartdomestic charging and uncontrolled public charging all ofthem take into account the expected future changes to theelectricity tariffs in the electricity market and appropriateregulation of EVs battery charging loads
In [11] the impacts of large-scale EVs deployment onthe particular networks are simulated and the results showthat it will lead to a variety of undesired effects such as assetoverloading and excessively low voltages Then a distributedhierarchical demand management scheme is integrated intoeach distribution network and proves to mitigate the unde-sired effects
In [12] an intelligent method is presented to minimizethe charging cost considering the acceptable charging powerof EV battery and the state of charge (SOC) in response totime-of-use (TOU) price in a regulated market The opti-mized charging model proposed explores the local optimalEV charging strategy successfully but fails to consider thenetwork impacts
In [13] a decentralized multiagent system (MAS) isproposed and a hybrid algorithm combined with an evolu-tionary algorithm and a linear programming was developedto manage a power distribution system with EVs
In [14] an intelligent decentralized multi-agent EVcharging control method based on TOU price scheme con-sidering network losses further is proposed The simulationresults show that the proposed approach can realize theeffective valley filling and provides results of similar qualitycompared to the centralized approach with limited computerresources and communication resources
In the related literature there are also several studies onswarm intelligence of ants which simulate insect behaviorof ants It is suitable for the distributed circumstances andhas been widely applied to the solution of TSP productionscheduling WSN routing and other complex optimizationproblems [15 16] But seldom literatures have been foundthat using the swarm intelligence of ants to manage the EVscharging which is what we will do in this paper
3 EV Charging Influence Factor andManagement Structure
31 EV Charging Influence Factor The basis of the researchof EV charging algorithm is to build appropriate EV loadmodel First we need to analyze the key influence factor ofthe EV charging to get better forecast and control of the EVload which mainly include the physical characteristics of EVcharging and EV using habit311 Physical Characteristics The physical characteristicsmainly include the EV type battery capacity and chargingpower
(1) EV Type In this paper EV type means the purpose of thecar mainly including private car and public service car suchas bus and taxi Different types of EV have different batterycapacity and charging power
The public service carsrsquo daily travel miles are longer thanprivate cars and charging one time per day cannot satisfytheir actual need So they need the method of fast chargingor battery replacement
The private cars are flexible to use and they are in stopstatus in 90 percent time of one day which is very convenientfor the charging In the future the private cars will be themain part of the EVs And there are some official surveydata about the national household travel of the United Stateswhich is about the private cars and can be used as the basisof the simulation So in this paper we mainly consider thecharging of private cars(2) Battery Capacity Generally the main battery capacityof the private cars is more than 16Kwh For example the
International Journal of Distributed Sensor Networks 3
Chevrolet VOLT is 16 Kwh the Japan LEAF is 24Kwh theHonda Fit is 20Kwh and the Ford Focus is 23 Kwh Thebattery capacity decides the limited mileage of the EV(3) Charging Power In the ordinary charge mode the charg-ing power per hour is 02 C and the charging time is 5 hoursIn the fast charge mode the charging power per hour is 1 Cor 2 C and the charging time is 1 hour or half an hour
Table 1 listed the main parameters of the slow charge andfast charge
312 UsingHabits Theusing habitsmainly include the traveltime travel miles charging place and charging time Theuserrsquos drive and travel habits are also important to the EVcharging Most of the researches neglect the statistic of dailytravel miles and only assume the basic information of SOCstart charging time and so forth which is differ from thereality
The Federal Highway Administration of the Departmentof Transportation of the United States made a survey aboutthe national household travel survey in 2009 and released theresult [17] According to the maximum likelihood estimationmethod the end time and the start time of the trip can beexpressed as the normal distribution approximately (Figure 1)[18] And the daily travel miles can be expressed as thelognormal distribution approximately (Figure 2) [10]
(1) Start and End Charge Time Probability Model Theirprobability density function is listed as follows
119891119904(119909) =
1
radic2120587120590119904
exp(minus(119909 + 24 minus 120583
119904)2
21205902119904
)
0 lt 119909 le 120583119904minus 12
1
radic2120587120590119904
exp(minus(119909 minus 120583
119904)2
21205902119904
)
120583119904minus 12 lt 119909 le 24
(1)
where 120583119904= 1747 120590
119904= 341
119891119890(119909) =
1
radic2120587120590119890
exp(minus(119909 minus 120583
119890)2
21205902119890
)
0 lt 119909 le 120583119890+ 12
1
radic2120587120590119890
exp(minus(119909 minus 24 minus 120583
119890)2
21205902119890
)
120583119890+ 12 lt 119909 le 24
(2)
where 120583119890= 892 120590
119890= 324
Table 1 Comparison of different charging modes of EVs
Charging mode Slow charge Fast chargeTimeh 5sim10 12sim1CurrentA 15 150sim400VoltageV 220 220Applicable location Home Charging station
0
20
40
60
80
100
120
140
EV n
umbe
r
8 10 12 14 16 18 20 22 24
0
002
004
006
008
01
012
(h)
Den
sity
Frequency histogram and normaldistribution density function
Figure 1 Frequency histogram and normal distribution densityfunction of the start charge time of EVs
(2) Daily Travel Miles Probability Model One has
119891119898
(119909) =1
radic2120587120590119898119909exp(minus
(ln119909 minus 120583119898)2
21205902119898
) (3)
where 120583119898
= 298 120590119898
= 114
32 EV Charging Management Structure There are severalmanagement structures of efficient EV charging in recentliteratures and the representative structures include thecentralized control hierarchical control and decentralizedcontrol
321 Centralized Control A lot of literatures use the verticaldispatch scheme which is very common in the power systemcontrol to realize the management of the EVs charging
Although the centralized dispatch scheme is conducive toget the global optimal solution in theory it is very hard toimplement in the power systemwith large-scale EVs using thetechnologies of today For example EVs will add too manyvariables to the central optimization problem which willlead to the high dimensionality and centralized managementneeds high computation and communication resources todeal with large amount of information
322 Hierarchical Control Some literatures use the hierar-chical scheme to resolve the problem of the pure centralizedcontrol The core idea is to divide the power system intotwo layers or three layers according to the voltage level anddivide the distribution system into many zones The EVsdispatching problem is divided into the transmission systemand several distribution system dispatching problems in this
4 International Journal of Distributed Sensor Networks
0
50
100
150
200
250
300
EV n
umbe
r
0 20 40 60 80 100 120 140 160 180 2000
0005
001
0015
002
0025
003
0035
(km)
Den
sity
Frequency histogram and lognormaldistribution density function
Figure 2 Frequency histogram and lognormal distribution densityfunction of the daily travel miles of EVs
schemeThis scheme can alleviate the pressure of the dispatchcenter of the transmission to a certain extent
323 Decentralized Control In this scheme EVs are char-acterized as agents with a certain level of autonomy takingdecisions based on their local and global environment Localenvironment includes EV ownerrsquos preferences and charginginfrastructure parameters while the global environmentincludes the transmissiondistribution network conditionsand energy market conditions
4 Swarm Intelligence and Ant-BasedCharging Coordination Algorithm
41 Swarm Intelligence Swarm intelligence stemmed fromthe mimic of the living colony such as ant bird and fishin nature which shows unparalleled excellence in swarmthan in single in food seeking or nest building Drawinginspiration from this researches design many algorithmssimulating colony living such as ant colony algorithmparticle swarm optimization algorithm artificial bee colonyalgorithm and artificial fish colony algorithm which showsexcellent performance in dealing with complex optimizationproblems [19]
Swarm intelligence has the ability tomanage complex sys-tems of interacting individuals through minimal communi-cationwith only local neighbors to produce a global behaviorwhich typically do not follow commands from a centralizedleader [20] These special features make swarm intelligenceplay important roles in many engineering applications suchas multirobot system control massive distributed sensingusing wireless sensor networks vehicles dispatch and powersystem optimization
42 Ant-Based Charging Coordination Algorithm Becauseof the high dimensionality and communication demand ofthe centralized control new methods such as the artificialswarm intelligence are worthy of exploring for the solutionof charging coordination of large-scale EVs Next we will usethe ASA to realize the valley filling at the transformer level
Control center
HVMV Substation
TransformerMVLV TransformerMVLV
Electric vehicle swarm under LV transformer
Subsidiaryswarm 1
Subsidiaryswarm 1
Subsidiaryswarm 119899
Subsidiaryswarm 119899
Figure 3 EVs swarm coordinated charging structure
Table 2 Notation description
Notation Description119864119894BC Battery capacity of the EV 119894
119875119894RC Rated charging power of the EV 119894
119864119894SOC119904 Start state of charge (SOC) of the EV 119894
119864119894SOC119890 End state of charge (SOC) of the EV 119894
119864119894SOC119903 Real state of charge (SOC) of the EV 119894
120578119894CH Charging efficiency of the charging device for the EV 119894
119879119894PI Plug-in grid time of the EV 119894 when going back to home
119879119894PO Plug-off grid time of the EV 119894 when leaving home
119872119894PD Daily travel miles of the EV 119894
119864119894119875100
Energy need when the EV 119894 travels 100 kilometers119879119894CH Real charge time of the EV 119894
119875119894MTF Maximum load power of the transformer EV 119894 plug in
119864119894ℎCH Charging energy of the EV 119894 at the time ℎ
119871ℎ119865
Forecast load of the transformer at the time ℎ
119871ℎ119877
Real load of the transformer at the time ℎ(not including the EV load)
119871ℎ119879119864
Total load of the transformer at the time ℎ with the EVload
120591119894ℎCH
Pheromone used to guide the charging of the EV 119894 atthe time ℎ
119875MV Maximum EV charging valley power of the day before
421 Single EV Charging Model
(1) Variables and Parameters Table 2 listed the main EVcharging variables and parameters considered in this paper
International Journal of Distributed Sensor Networks 5
Start
Set EV parameters
Initialize pheromone
Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1
Ant 119870 = 119870 + 1
Find suitable charging time segment
Get charging schedule of each EV
Modify EV charging status
Pheromone update
End
N
N
N
Y
Y
119871ℎTE le 119875119894MTF
119870 ge 119872
119873119888 ge 119873119888 max
Figure 4 Ant-based charging planning algorithm flow
For the 119894th EV the charging time can be calculated asfollows
119879119894CH =
(119864119894SOC119890 minus 119864
119894SOC119904) 119864119894BC
119875119894RC120578119894CH
(4)
119864119894SOC119904 = 119864
119894SOC119903 minus119872119894PD119864119894119875100
100119864119894BC
(5)
(2) Charging ConstraintsThe charging constraints of a singleEV mainly include the SOC constraint the charging timeconstraint and the transformer capacity constraint
The SOC constraint is defined by
119864119894SOC119903 ge 119864
119894SOC119890 (6)
The charging time constraint is defined by
119879119894CH le 119879
119894PO minus 119879119894PI (7)
Considering the upper limit of the transformer capacitythe total load with the 119894th EV at the time ℎ should not exceedthe maximum load power of the transformer The capacityconstraint is defined by
119871ℎ119877
+ sum119905=ℎ
119864119894ℎCH lt 119875
119894MTF (8)
422 Ant-Based EV Charging Swarm Structure After carefulinvestigation and analysis the idea ofmultirobot cooperationbased on ant colony algorithm can be applied into the EVswarm intelligent charging control [21 22] Each EV is anant of the whole charging system and it can communicatewith others to exchange the key information to realize thecooperated control of the charging
The cooperation methods of multirobot system includethe centralized control distributed control and the hybrid
6 International Journal of Distributed Sensor Networks
control which integrate the first two methods effectively andare used extensively now Based on this and integrating thecentralized control hierarchical control and decentralizedcontrol methods of EV charging illustrated in many liter-atures a hybrid control structure is proposed as shown inFigure 3
It includes four layers typically (maybe more accordingto the system scale) which is the control center substationtransformer and EVs in turn The first three layers areusing the traditional centralized control structure from topto down which is widely used in the power grid now Thethird layer only controls the fourth layer partly and thefourth layer uses the distributed control structure The EVscan exchange information with others to make a decisionindependently which can get not only the flexibility but alsothe adaptability Generally the EVs in one line can form adynamic union which can be called a subsidiary swarm torealize the coordinated charging with others
The communication is the basis of the informationshare and task cooperate between EVs and mainly includesthe point-to-point communication broadcast and groupcommunication Wireless communication such as WSNs issuitable for the communication of ant-based swarm chargingsystem because of its distributed characteristic
423 Ant-Based EV Charging Algorithm
(1) Ant Colony Algorithm Used in Multirobot CollaborationAnt colony algorithm (ACA) is a simulation of antrsquos swarmintelligent behavior in food seeking where ants transmitmessages to each other by releasing pheromone and canalways find a shortest routing path form their nest to foodsource by swarm cooperation ACA was first presentedcombining with TSP problem by Dorigo et al in 1996 [23]Then it was successfully applied in TSP assignment prob-lem job shop scheduling network route design multirobotcollaboration and so forth which shows its advantages incomplex optimization problem especially the discrete ones
The multirobot system is a distributed system and theadvantage of it is that a robot can either work alone orcooperate with others The relationships among the robotsare equalityThe robot can exchange information with othersthrough communication and can make a decision inde-pendently Different tasks were given different quantity ofpheromone in the ACA used in multirobot system whichwas used to attract the robots to choose which task shouldbe accomplished with priority The more difficult tasks willpossess higher pheromone amount than the easier ones sothat the robots will choose to participate in the difficult taskswith priority
(2)The Suggested Charging Planning Algorithm In this paperan improved algorithm based on the ACA used inmultirobotcollaboration is implemented to solve the EVs chargingschedule problem according to the day-ahead load forecastdata of the transformer In this algorithm the load valleyfilling of different valley time segments is the tasks of the ants
The ant-based charging plan algorithm (Figure 4) mainlyincludes these steps as follows
Step 1 Setting up the EVsrsquo parameters Including the EVnumber (ant population) the use habit of EV such as theplug-in and plug-off grid time (can help to get the usablecharging time assume that the car plug-in the grid whencomes home and plug-off the grid when leaves home) thedaily travel miles and the energy need when traveling 100 KM(can help to compute the SOC of the battery) the chargingefficiency the rated charging power and so forth
Step 2 Initializing the pheromone Compute the pheromoneaccording to the day-ahead load forecast data of the trans-former and other parameters using (9)
Step 3 Setting up the maximum iterations 119873119888max and the
ant numbers 119872 of each iteration The fluctuation of the loadcurve is related to the 119872 tightly
Step 4 Loop for iterating in turn of the plug-in time of theEVs Each ant decides the suitable charging time segmentaccording to its parameters and the pheromone of other antsis released
Step 5 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 6 Update the pheromone at the charging time segmentfor other EVs to use
Step 7 Generate the charging scheduling of all EVs
The charging planning pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
119870119897
119871ℎTE
(1 le ℎ lt 1199051 1199052 lt ℎ le 24)
119870ℎ
ℎ+
119870119897
119871ℎTE
(1199051 le ℎ lt 1199052 119871ℎfc le 119875MV)
0 (1199051 le ℎ lt 1199052 119871ℎfc gt 119875MV)
0 (ℎ lt 119879119894PI ℎ gt 119879
119894PO)
(9)
where 1199051 and 1199052 are the intersection of load forecast curveand maximum valley power line of EV charging And theycan be calculated from 119875MV and 119871
ℎ119865 119870119897and 119870
ℎare the
main influence factors of the pheromone and can be adjustedaccording to the coordination object
(3)The Feasibility Analysis of Proposed Algorithm Each EV isa relative independent individual in this algorithm which isan ant in fact The global optimization objects are the sumof all individualsrsquo optimization value So the proof of thealgorithm feasibility is to prove that each EV can reach theoptimal value when it plug in the grid
Assume that 119864(119873) is the sets of all EVs as follows
119864 (119873) = 119890 = (1198901 1198902 119890
119873) 119890119894isin 119864 (119894 le 119873) (10)
International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 3
Chevrolet VOLT is 16 Kwh the Japan LEAF is 24Kwh theHonda Fit is 20Kwh and the Ford Focus is 23 Kwh Thebattery capacity decides the limited mileage of the EV(3) Charging Power In the ordinary charge mode the charg-ing power per hour is 02 C and the charging time is 5 hoursIn the fast charge mode the charging power per hour is 1 Cor 2 C and the charging time is 1 hour or half an hour
Table 1 listed the main parameters of the slow charge andfast charge
312 UsingHabits Theusing habitsmainly include the traveltime travel miles charging place and charging time Theuserrsquos drive and travel habits are also important to the EVcharging Most of the researches neglect the statistic of dailytravel miles and only assume the basic information of SOCstart charging time and so forth which is differ from thereality
The Federal Highway Administration of the Departmentof Transportation of the United States made a survey aboutthe national household travel survey in 2009 and released theresult [17] According to the maximum likelihood estimationmethod the end time and the start time of the trip can beexpressed as the normal distribution approximately (Figure 1)[18] And the daily travel miles can be expressed as thelognormal distribution approximately (Figure 2) [10]
(1) Start and End Charge Time Probability Model Theirprobability density function is listed as follows
119891119904(119909) =
1
radic2120587120590119904
exp(minus(119909 + 24 minus 120583
119904)2
21205902119904
)
0 lt 119909 le 120583119904minus 12
1
radic2120587120590119904
exp(minus(119909 minus 120583
119904)2
21205902119904
)
120583119904minus 12 lt 119909 le 24
(1)
where 120583119904= 1747 120590
119904= 341
119891119890(119909) =
1
radic2120587120590119890
exp(minus(119909 minus 120583
119890)2
21205902119890
)
0 lt 119909 le 120583119890+ 12
1
radic2120587120590119890
exp(minus(119909 minus 24 minus 120583
119890)2
21205902119890
)
120583119890+ 12 lt 119909 le 24
(2)
where 120583119890= 892 120590
119890= 324
Table 1 Comparison of different charging modes of EVs
Charging mode Slow charge Fast chargeTimeh 5sim10 12sim1CurrentA 15 150sim400VoltageV 220 220Applicable location Home Charging station
0
20
40
60
80
100
120
140
EV n
umbe
r
8 10 12 14 16 18 20 22 24
0
002
004
006
008
01
012
(h)
Den
sity
Frequency histogram and normaldistribution density function
Figure 1 Frequency histogram and normal distribution densityfunction of the start charge time of EVs
(2) Daily Travel Miles Probability Model One has
119891119898
(119909) =1
radic2120587120590119898119909exp(minus
(ln119909 minus 120583119898)2
21205902119898
) (3)
where 120583119898
= 298 120590119898
= 114
32 EV Charging Management Structure There are severalmanagement structures of efficient EV charging in recentliteratures and the representative structures include thecentralized control hierarchical control and decentralizedcontrol
321 Centralized Control A lot of literatures use the verticaldispatch scheme which is very common in the power systemcontrol to realize the management of the EVs charging
Although the centralized dispatch scheme is conducive toget the global optimal solution in theory it is very hard toimplement in the power systemwith large-scale EVs using thetechnologies of today For example EVs will add too manyvariables to the central optimization problem which willlead to the high dimensionality and centralized managementneeds high computation and communication resources todeal with large amount of information
322 Hierarchical Control Some literatures use the hierar-chical scheme to resolve the problem of the pure centralizedcontrol The core idea is to divide the power system intotwo layers or three layers according to the voltage level anddivide the distribution system into many zones The EVsdispatching problem is divided into the transmission systemand several distribution system dispatching problems in this
4 International Journal of Distributed Sensor Networks
0
50
100
150
200
250
300
EV n
umbe
r
0 20 40 60 80 100 120 140 160 180 2000
0005
001
0015
002
0025
003
0035
(km)
Den
sity
Frequency histogram and lognormaldistribution density function
Figure 2 Frequency histogram and lognormal distribution densityfunction of the daily travel miles of EVs
schemeThis scheme can alleviate the pressure of the dispatchcenter of the transmission to a certain extent
323 Decentralized Control In this scheme EVs are char-acterized as agents with a certain level of autonomy takingdecisions based on their local and global environment Localenvironment includes EV ownerrsquos preferences and charginginfrastructure parameters while the global environmentincludes the transmissiondistribution network conditionsand energy market conditions
4 Swarm Intelligence and Ant-BasedCharging Coordination Algorithm
41 Swarm Intelligence Swarm intelligence stemmed fromthe mimic of the living colony such as ant bird and fishin nature which shows unparalleled excellence in swarmthan in single in food seeking or nest building Drawinginspiration from this researches design many algorithmssimulating colony living such as ant colony algorithmparticle swarm optimization algorithm artificial bee colonyalgorithm and artificial fish colony algorithm which showsexcellent performance in dealing with complex optimizationproblems [19]
Swarm intelligence has the ability tomanage complex sys-tems of interacting individuals through minimal communi-cationwith only local neighbors to produce a global behaviorwhich typically do not follow commands from a centralizedleader [20] These special features make swarm intelligenceplay important roles in many engineering applications suchas multirobot system control massive distributed sensingusing wireless sensor networks vehicles dispatch and powersystem optimization
42 Ant-Based Charging Coordination Algorithm Becauseof the high dimensionality and communication demand ofthe centralized control new methods such as the artificialswarm intelligence are worthy of exploring for the solutionof charging coordination of large-scale EVs Next we will usethe ASA to realize the valley filling at the transformer level
Control center
HVMV Substation
TransformerMVLV TransformerMVLV
Electric vehicle swarm under LV transformer
Subsidiaryswarm 1
Subsidiaryswarm 1
Subsidiaryswarm 119899
Subsidiaryswarm 119899
Figure 3 EVs swarm coordinated charging structure
Table 2 Notation description
Notation Description119864119894BC Battery capacity of the EV 119894
119875119894RC Rated charging power of the EV 119894
119864119894SOC119904 Start state of charge (SOC) of the EV 119894
119864119894SOC119890 End state of charge (SOC) of the EV 119894
119864119894SOC119903 Real state of charge (SOC) of the EV 119894
120578119894CH Charging efficiency of the charging device for the EV 119894
119879119894PI Plug-in grid time of the EV 119894 when going back to home
119879119894PO Plug-off grid time of the EV 119894 when leaving home
119872119894PD Daily travel miles of the EV 119894
119864119894119875100
Energy need when the EV 119894 travels 100 kilometers119879119894CH Real charge time of the EV 119894
119875119894MTF Maximum load power of the transformer EV 119894 plug in
119864119894ℎCH Charging energy of the EV 119894 at the time ℎ
119871ℎ119865
Forecast load of the transformer at the time ℎ
119871ℎ119877
Real load of the transformer at the time ℎ(not including the EV load)
119871ℎ119879119864
Total load of the transformer at the time ℎ with the EVload
120591119894ℎCH
Pheromone used to guide the charging of the EV 119894 atthe time ℎ
119875MV Maximum EV charging valley power of the day before
421 Single EV Charging Model
(1) Variables and Parameters Table 2 listed the main EVcharging variables and parameters considered in this paper
International Journal of Distributed Sensor Networks 5
Start
Set EV parameters
Initialize pheromone
Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1
Ant 119870 = 119870 + 1
Find suitable charging time segment
Get charging schedule of each EV
Modify EV charging status
Pheromone update
End
N
N
N
Y
Y
119871ℎTE le 119875119894MTF
119870 ge 119872
119873119888 ge 119873119888 max
Figure 4 Ant-based charging planning algorithm flow
For the 119894th EV the charging time can be calculated asfollows
119879119894CH =
(119864119894SOC119890 minus 119864
119894SOC119904) 119864119894BC
119875119894RC120578119894CH
(4)
119864119894SOC119904 = 119864
119894SOC119903 minus119872119894PD119864119894119875100
100119864119894BC
(5)
(2) Charging ConstraintsThe charging constraints of a singleEV mainly include the SOC constraint the charging timeconstraint and the transformer capacity constraint
The SOC constraint is defined by
119864119894SOC119903 ge 119864
119894SOC119890 (6)
The charging time constraint is defined by
119879119894CH le 119879
119894PO minus 119879119894PI (7)
Considering the upper limit of the transformer capacitythe total load with the 119894th EV at the time ℎ should not exceedthe maximum load power of the transformer The capacityconstraint is defined by
119871ℎ119877
+ sum119905=ℎ
119864119894ℎCH lt 119875
119894MTF (8)
422 Ant-Based EV Charging Swarm Structure After carefulinvestigation and analysis the idea ofmultirobot cooperationbased on ant colony algorithm can be applied into the EVswarm intelligent charging control [21 22] Each EV is anant of the whole charging system and it can communicatewith others to exchange the key information to realize thecooperated control of the charging
The cooperation methods of multirobot system includethe centralized control distributed control and the hybrid
6 International Journal of Distributed Sensor Networks
control which integrate the first two methods effectively andare used extensively now Based on this and integrating thecentralized control hierarchical control and decentralizedcontrol methods of EV charging illustrated in many liter-atures a hybrid control structure is proposed as shown inFigure 3
It includes four layers typically (maybe more accordingto the system scale) which is the control center substationtransformer and EVs in turn The first three layers areusing the traditional centralized control structure from topto down which is widely used in the power grid now Thethird layer only controls the fourth layer partly and thefourth layer uses the distributed control structure The EVscan exchange information with others to make a decisionindependently which can get not only the flexibility but alsothe adaptability Generally the EVs in one line can form adynamic union which can be called a subsidiary swarm torealize the coordinated charging with others
The communication is the basis of the informationshare and task cooperate between EVs and mainly includesthe point-to-point communication broadcast and groupcommunication Wireless communication such as WSNs issuitable for the communication of ant-based swarm chargingsystem because of its distributed characteristic
423 Ant-Based EV Charging Algorithm
(1) Ant Colony Algorithm Used in Multirobot CollaborationAnt colony algorithm (ACA) is a simulation of antrsquos swarmintelligent behavior in food seeking where ants transmitmessages to each other by releasing pheromone and canalways find a shortest routing path form their nest to foodsource by swarm cooperation ACA was first presentedcombining with TSP problem by Dorigo et al in 1996 [23]Then it was successfully applied in TSP assignment prob-lem job shop scheduling network route design multirobotcollaboration and so forth which shows its advantages incomplex optimization problem especially the discrete ones
The multirobot system is a distributed system and theadvantage of it is that a robot can either work alone orcooperate with others The relationships among the robotsare equalityThe robot can exchange information with othersthrough communication and can make a decision inde-pendently Different tasks were given different quantity ofpheromone in the ACA used in multirobot system whichwas used to attract the robots to choose which task shouldbe accomplished with priority The more difficult tasks willpossess higher pheromone amount than the easier ones sothat the robots will choose to participate in the difficult taskswith priority
(2)The Suggested Charging Planning Algorithm In this paperan improved algorithm based on the ACA used inmultirobotcollaboration is implemented to solve the EVs chargingschedule problem according to the day-ahead load forecastdata of the transformer In this algorithm the load valleyfilling of different valley time segments is the tasks of the ants
The ant-based charging plan algorithm (Figure 4) mainlyincludes these steps as follows
Step 1 Setting up the EVsrsquo parameters Including the EVnumber (ant population) the use habit of EV such as theplug-in and plug-off grid time (can help to get the usablecharging time assume that the car plug-in the grid whencomes home and plug-off the grid when leaves home) thedaily travel miles and the energy need when traveling 100 KM(can help to compute the SOC of the battery) the chargingefficiency the rated charging power and so forth
Step 2 Initializing the pheromone Compute the pheromoneaccording to the day-ahead load forecast data of the trans-former and other parameters using (9)
Step 3 Setting up the maximum iterations 119873119888max and the
ant numbers 119872 of each iteration The fluctuation of the loadcurve is related to the 119872 tightly
Step 4 Loop for iterating in turn of the plug-in time of theEVs Each ant decides the suitable charging time segmentaccording to its parameters and the pheromone of other antsis released
Step 5 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 6 Update the pheromone at the charging time segmentfor other EVs to use
Step 7 Generate the charging scheduling of all EVs
The charging planning pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
119870119897
119871ℎTE
(1 le ℎ lt 1199051 1199052 lt ℎ le 24)
119870ℎ
ℎ+
119870119897
119871ℎTE
(1199051 le ℎ lt 1199052 119871ℎfc le 119875MV)
0 (1199051 le ℎ lt 1199052 119871ℎfc gt 119875MV)
0 (ℎ lt 119879119894PI ℎ gt 119879
119894PO)
(9)
where 1199051 and 1199052 are the intersection of load forecast curveand maximum valley power line of EV charging And theycan be calculated from 119875MV and 119871
ℎ119865 119870119897and 119870
ℎare the
main influence factors of the pheromone and can be adjustedaccording to the coordination object
(3)The Feasibility Analysis of Proposed Algorithm Each EV isa relative independent individual in this algorithm which isan ant in fact The global optimization objects are the sumof all individualsrsquo optimization value So the proof of thealgorithm feasibility is to prove that each EV can reach theoptimal value when it plug in the grid
Assume that 119864(119873) is the sets of all EVs as follows
119864 (119873) = 119890 = (1198901 1198902 119890
119873) 119890119894isin 119864 (119894 le 119873) (10)
International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Distributed Sensor Networks
0
50
100
150
200
250
300
EV n
umbe
r
0 20 40 60 80 100 120 140 160 180 2000
0005
001
0015
002
0025
003
0035
(km)
Den
sity
Frequency histogram and lognormaldistribution density function
Figure 2 Frequency histogram and lognormal distribution densityfunction of the daily travel miles of EVs
schemeThis scheme can alleviate the pressure of the dispatchcenter of the transmission to a certain extent
323 Decentralized Control In this scheme EVs are char-acterized as agents with a certain level of autonomy takingdecisions based on their local and global environment Localenvironment includes EV ownerrsquos preferences and charginginfrastructure parameters while the global environmentincludes the transmissiondistribution network conditionsand energy market conditions
4 Swarm Intelligence and Ant-BasedCharging Coordination Algorithm
41 Swarm Intelligence Swarm intelligence stemmed fromthe mimic of the living colony such as ant bird and fishin nature which shows unparalleled excellence in swarmthan in single in food seeking or nest building Drawinginspiration from this researches design many algorithmssimulating colony living such as ant colony algorithmparticle swarm optimization algorithm artificial bee colonyalgorithm and artificial fish colony algorithm which showsexcellent performance in dealing with complex optimizationproblems [19]
Swarm intelligence has the ability tomanage complex sys-tems of interacting individuals through minimal communi-cationwith only local neighbors to produce a global behaviorwhich typically do not follow commands from a centralizedleader [20] These special features make swarm intelligenceplay important roles in many engineering applications suchas multirobot system control massive distributed sensingusing wireless sensor networks vehicles dispatch and powersystem optimization
42 Ant-Based Charging Coordination Algorithm Becauseof the high dimensionality and communication demand ofthe centralized control new methods such as the artificialswarm intelligence are worthy of exploring for the solutionof charging coordination of large-scale EVs Next we will usethe ASA to realize the valley filling at the transformer level
Control center
HVMV Substation
TransformerMVLV TransformerMVLV
Electric vehicle swarm under LV transformer
Subsidiaryswarm 1
Subsidiaryswarm 1
Subsidiaryswarm 119899
Subsidiaryswarm 119899
Figure 3 EVs swarm coordinated charging structure
Table 2 Notation description
Notation Description119864119894BC Battery capacity of the EV 119894
119875119894RC Rated charging power of the EV 119894
119864119894SOC119904 Start state of charge (SOC) of the EV 119894
119864119894SOC119890 End state of charge (SOC) of the EV 119894
119864119894SOC119903 Real state of charge (SOC) of the EV 119894
120578119894CH Charging efficiency of the charging device for the EV 119894
119879119894PI Plug-in grid time of the EV 119894 when going back to home
119879119894PO Plug-off grid time of the EV 119894 when leaving home
119872119894PD Daily travel miles of the EV 119894
119864119894119875100
Energy need when the EV 119894 travels 100 kilometers119879119894CH Real charge time of the EV 119894
119875119894MTF Maximum load power of the transformer EV 119894 plug in
119864119894ℎCH Charging energy of the EV 119894 at the time ℎ
119871ℎ119865
Forecast load of the transformer at the time ℎ
119871ℎ119877
Real load of the transformer at the time ℎ(not including the EV load)
119871ℎ119879119864
Total load of the transformer at the time ℎ with the EVload
120591119894ℎCH
Pheromone used to guide the charging of the EV 119894 atthe time ℎ
119875MV Maximum EV charging valley power of the day before
421 Single EV Charging Model
(1) Variables and Parameters Table 2 listed the main EVcharging variables and parameters considered in this paper
International Journal of Distributed Sensor Networks 5
Start
Set EV parameters
Initialize pheromone
Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1
Ant 119870 = 119870 + 1
Find suitable charging time segment
Get charging schedule of each EV
Modify EV charging status
Pheromone update
End
N
N
N
Y
Y
119871ℎTE le 119875119894MTF
119870 ge 119872
119873119888 ge 119873119888 max
Figure 4 Ant-based charging planning algorithm flow
For the 119894th EV the charging time can be calculated asfollows
119879119894CH =
(119864119894SOC119890 minus 119864
119894SOC119904) 119864119894BC
119875119894RC120578119894CH
(4)
119864119894SOC119904 = 119864
119894SOC119903 minus119872119894PD119864119894119875100
100119864119894BC
(5)
(2) Charging ConstraintsThe charging constraints of a singleEV mainly include the SOC constraint the charging timeconstraint and the transformer capacity constraint
The SOC constraint is defined by
119864119894SOC119903 ge 119864
119894SOC119890 (6)
The charging time constraint is defined by
119879119894CH le 119879
119894PO minus 119879119894PI (7)
Considering the upper limit of the transformer capacitythe total load with the 119894th EV at the time ℎ should not exceedthe maximum load power of the transformer The capacityconstraint is defined by
119871ℎ119877
+ sum119905=ℎ
119864119894ℎCH lt 119875
119894MTF (8)
422 Ant-Based EV Charging Swarm Structure After carefulinvestigation and analysis the idea ofmultirobot cooperationbased on ant colony algorithm can be applied into the EVswarm intelligent charging control [21 22] Each EV is anant of the whole charging system and it can communicatewith others to exchange the key information to realize thecooperated control of the charging
The cooperation methods of multirobot system includethe centralized control distributed control and the hybrid
6 International Journal of Distributed Sensor Networks
control which integrate the first two methods effectively andare used extensively now Based on this and integrating thecentralized control hierarchical control and decentralizedcontrol methods of EV charging illustrated in many liter-atures a hybrid control structure is proposed as shown inFigure 3
It includes four layers typically (maybe more accordingto the system scale) which is the control center substationtransformer and EVs in turn The first three layers areusing the traditional centralized control structure from topto down which is widely used in the power grid now Thethird layer only controls the fourth layer partly and thefourth layer uses the distributed control structure The EVscan exchange information with others to make a decisionindependently which can get not only the flexibility but alsothe adaptability Generally the EVs in one line can form adynamic union which can be called a subsidiary swarm torealize the coordinated charging with others
The communication is the basis of the informationshare and task cooperate between EVs and mainly includesthe point-to-point communication broadcast and groupcommunication Wireless communication such as WSNs issuitable for the communication of ant-based swarm chargingsystem because of its distributed characteristic
423 Ant-Based EV Charging Algorithm
(1) Ant Colony Algorithm Used in Multirobot CollaborationAnt colony algorithm (ACA) is a simulation of antrsquos swarmintelligent behavior in food seeking where ants transmitmessages to each other by releasing pheromone and canalways find a shortest routing path form their nest to foodsource by swarm cooperation ACA was first presentedcombining with TSP problem by Dorigo et al in 1996 [23]Then it was successfully applied in TSP assignment prob-lem job shop scheduling network route design multirobotcollaboration and so forth which shows its advantages incomplex optimization problem especially the discrete ones
The multirobot system is a distributed system and theadvantage of it is that a robot can either work alone orcooperate with others The relationships among the robotsare equalityThe robot can exchange information with othersthrough communication and can make a decision inde-pendently Different tasks were given different quantity ofpheromone in the ACA used in multirobot system whichwas used to attract the robots to choose which task shouldbe accomplished with priority The more difficult tasks willpossess higher pheromone amount than the easier ones sothat the robots will choose to participate in the difficult taskswith priority
(2)The Suggested Charging Planning Algorithm In this paperan improved algorithm based on the ACA used inmultirobotcollaboration is implemented to solve the EVs chargingschedule problem according to the day-ahead load forecastdata of the transformer In this algorithm the load valleyfilling of different valley time segments is the tasks of the ants
The ant-based charging plan algorithm (Figure 4) mainlyincludes these steps as follows
Step 1 Setting up the EVsrsquo parameters Including the EVnumber (ant population) the use habit of EV such as theplug-in and plug-off grid time (can help to get the usablecharging time assume that the car plug-in the grid whencomes home and plug-off the grid when leaves home) thedaily travel miles and the energy need when traveling 100 KM(can help to compute the SOC of the battery) the chargingefficiency the rated charging power and so forth
Step 2 Initializing the pheromone Compute the pheromoneaccording to the day-ahead load forecast data of the trans-former and other parameters using (9)
Step 3 Setting up the maximum iterations 119873119888max and the
ant numbers 119872 of each iteration The fluctuation of the loadcurve is related to the 119872 tightly
Step 4 Loop for iterating in turn of the plug-in time of theEVs Each ant decides the suitable charging time segmentaccording to its parameters and the pheromone of other antsis released
Step 5 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 6 Update the pheromone at the charging time segmentfor other EVs to use
Step 7 Generate the charging scheduling of all EVs
The charging planning pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
119870119897
119871ℎTE
(1 le ℎ lt 1199051 1199052 lt ℎ le 24)
119870ℎ
ℎ+
119870119897
119871ℎTE
(1199051 le ℎ lt 1199052 119871ℎfc le 119875MV)
0 (1199051 le ℎ lt 1199052 119871ℎfc gt 119875MV)
0 (ℎ lt 119879119894PI ℎ gt 119879
119894PO)
(9)
where 1199051 and 1199052 are the intersection of load forecast curveand maximum valley power line of EV charging And theycan be calculated from 119875MV and 119871
ℎ119865 119870119897and 119870
ℎare the
main influence factors of the pheromone and can be adjustedaccording to the coordination object
(3)The Feasibility Analysis of Proposed Algorithm Each EV isa relative independent individual in this algorithm which isan ant in fact The global optimization objects are the sumof all individualsrsquo optimization value So the proof of thealgorithm feasibility is to prove that each EV can reach theoptimal value when it plug in the grid
Assume that 119864(119873) is the sets of all EVs as follows
119864 (119873) = 119890 = (1198901 1198902 119890
119873) 119890119894isin 119864 (119894 le 119873) (10)
International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 5
Start
Set EV parameters
Initialize pheromone
Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1
Ant 119870 = 119870 + 1
Find suitable charging time segment
Get charging schedule of each EV
Modify EV charging status
Pheromone update
End
N
N
N
Y
Y
119871ℎTE le 119875119894MTF
119870 ge 119872
119873119888 ge 119873119888 max
Figure 4 Ant-based charging planning algorithm flow
For the 119894th EV the charging time can be calculated asfollows
119879119894CH =
(119864119894SOC119890 minus 119864
119894SOC119904) 119864119894BC
119875119894RC120578119894CH
(4)
119864119894SOC119904 = 119864
119894SOC119903 minus119872119894PD119864119894119875100
100119864119894BC
(5)
(2) Charging ConstraintsThe charging constraints of a singleEV mainly include the SOC constraint the charging timeconstraint and the transformer capacity constraint
The SOC constraint is defined by
119864119894SOC119903 ge 119864
119894SOC119890 (6)
The charging time constraint is defined by
119879119894CH le 119879
119894PO minus 119879119894PI (7)
Considering the upper limit of the transformer capacitythe total load with the 119894th EV at the time ℎ should not exceedthe maximum load power of the transformer The capacityconstraint is defined by
119871ℎ119877
+ sum119905=ℎ
119864119894ℎCH lt 119875
119894MTF (8)
422 Ant-Based EV Charging Swarm Structure After carefulinvestigation and analysis the idea ofmultirobot cooperationbased on ant colony algorithm can be applied into the EVswarm intelligent charging control [21 22] Each EV is anant of the whole charging system and it can communicatewith others to exchange the key information to realize thecooperated control of the charging
The cooperation methods of multirobot system includethe centralized control distributed control and the hybrid
6 International Journal of Distributed Sensor Networks
control which integrate the first two methods effectively andare used extensively now Based on this and integrating thecentralized control hierarchical control and decentralizedcontrol methods of EV charging illustrated in many liter-atures a hybrid control structure is proposed as shown inFigure 3
It includes four layers typically (maybe more accordingto the system scale) which is the control center substationtransformer and EVs in turn The first three layers areusing the traditional centralized control structure from topto down which is widely used in the power grid now Thethird layer only controls the fourth layer partly and thefourth layer uses the distributed control structure The EVscan exchange information with others to make a decisionindependently which can get not only the flexibility but alsothe adaptability Generally the EVs in one line can form adynamic union which can be called a subsidiary swarm torealize the coordinated charging with others
The communication is the basis of the informationshare and task cooperate between EVs and mainly includesthe point-to-point communication broadcast and groupcommunication Wireless communication such as WSNs issuitable for the communication of ant-based swarm chargingsystem because of its distributed characteristic
423 Ant-Based EV Charging Algorithm
(1) Ant Colony Algorithm Used in Multirobot CollaborationAnt colony algorithm (ACA) is a simulation of antrsquos swarmintelligent behavior in food seeking where ants transmitmessages to each other by releasing pheromone and canalways find a shortest routing path form their nest to foodsource by swarm cooperation ACA was first presentedcombining with TSP problem by Dorigo et al in 1996 [23]Then it was successfully applied in TSP assignment prob-lem job shop scheduling network route design multirobotcollaboration and so forth which shows its advantages incomplex optimization problem especially the discrete ones
The multirobot system is a distributed system and theadvantage of it is that a robot can either work alone orcooperate with others The relationships among the robotsare equalityThe robot can exchange information with othersthrough communication and can make a decision inde-pendently Different tasks were given different quantity ofpheromone in the ACA used in multirobot system whichwas used to attract the robots to choose which task shouldbe accomplished with priority The more difficult tasks willpossess higher pheromone amount than the easier ones sothat the robots will choose to participate in the difficult taskswith priority
(2)The Suggested Charging Planning Algorithm In this paperan improved algorithm based on the ACA used inmultirobotcollaboration is implemented to solve the EVs chargingschedule problem according to the day-ahead load forecastdata of the transformer In this algorithm the load valleyfilling of different valley time segments is the tasks of the ants
The ant-based charging plan algorithm (Figure 4) mainlyincludes these steps as follows
Step 1 Setting up the EVsrsquo parameters Including the EVnumber (ant population) the use habit of EV such as theplug-in and plug-off grid time (can help to get the usablecharging time assume that the car plug-in the grid whencomes home and plug-off the grid when leaves home) thedaily travel miles and the energy need when traveling 100 KM(can help to compute the SOC of the battery) the chargingefficiency the rated charging power and so forth
Step 2 Initializing the pheromone Compute the pheromoneaccording to the day-ahead load forecast data of the trans-former and other parameters using (9)
Step 3 Setting up the maximum iterations 119873119888max and the
ant numbers 119872 of each iteration The fluctuation of the loadcurve is related to the 119872 tightly
Step 4 Loop for iterating in turn of the plug-in time of theEVs Each ant decides the suitable charging time segmentaccording to its parameters and the pheromone of other antsis released
Step 5 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 6 Update the pheromone at the charging time segmentfor other EVs to use
Step 7 Generate the charging scheduling of all EVs
The charging planning pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
119870119897
119871ℎTE
(1 le ℎ lt 1199051 1199052 lt ℎ le 24)
119870ℎ
ℎ+
119870119897
119871ℎTE
(1199051 le ℎ lt 1199052 119871ℎfc le 119875MV)
0 (1199051 le ℎ lt 1199052 119871ℎfc gt 119875MV)
0 (ℎ lt 119879119894PI ℎ gt 119879
119894PO)
(9)
where 1199051 and 1199052 are the intersection of load forecast curveand maximum valley power line of EV charging And theycan be calculated from 119875MV and 119871
ℎ119865 119870119897and 119870
ℎare the
main influence factors of the pheromone and can be adjustedaccording to the coordination object
(3)The Feasibility Analysis of Proposed Algorithm Each EV isa relative independent individual in this algorithm which isan ant in fact The global optimization objects are the sumof all individualsrsquo optimization value So the proof of thealgorithm feasibility is to prove that each EV can reach theoptimal value when it plug in the grid
Assume that 119864(119873) is the sets of all EVs as follows
119864 (119873) = 119890 = (1198901 1198902 119890
119873) 119890119894isin 119864 (119894 le 119873) (10)
International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Distributed Sensor Networks
control which integrate the first two methods effectively andare used extensively now Based on this and integrating thecentralized control hierarchical control and decentralizedcontrol methods of EV charging illustrated in many liter-atures a hybrid control structure is proposed as shown inFigure 3
It includes four layers typically (maybe more accordingto the system scale) which is the control center substationtransformer and EVs in turn The first three layers areusing the traditional centralized control structure from topto down which is widely used in the power grid now Thethird layer only controls the fourth layer partly and thefourth layer uses the distributed control structure The EVscan exchange information with others to make a decisionindependently which can get not only the flexibility but alsothe adaptability Generally the EVs in one line can form adynamic union which can be called a subsidiary swarm torealize the coordinated charging with others
The communication is the basis of the informationshare and task cooperate between EVs and mainly includesthe point-to-point communication broadcast and groupcommunication Wireless communication such as WSNs issuitable for the communication of ant-based swarm chargingsystem because of its distributed characteristic
423 Ant-Based EV Charging Algorithm
(1) Ant Colony Algorithm Used in Multirobot CollaborationAnt colony algorithm (ACA) is a simulation of antrsquos swarmintelligent behavior in food seeking where ants transmitmessages to each other by releasing pheromone and canalways find a shortest routing path form their nest to foodsource by swarm cooperation ACA was first presentedcombining with TSP problem by Dorigo et al in 1996 [23]Then it was successfully applied in TSP assignment prob-lem job shop scheduling network route design multirobotcollaboration and so forth which shows its advantages incomplex optimization problem especially the discrete ones
The multirobot system is a distributed system and theadvantage of it is that a robot can either work alone orcooperate with others The relationships among the robotsare equalityThe robot can exchange information with othersthrough communication and can make a decision inde-pendently Different tasks were given different quantity ofpheromone in the ACA used in multirobot system whichwas used to attract the robots to choose which task shouldbe accomplished with priority The more difficult tasks willpossess higher pheromone amount than the easier ones sothat the robots will choose to participate in the difficult taskswith priority
(2)The Suggested Charging Planning Algorithm In this paperan improved algorithm based on the ACA used inmultirobotcollaboration is implemented to solve the EVs chargingschedule problem according to the day-ahead load forecastdata of the transformer In this algorithm the load valleyfilling of different valley time segments is the tasks of the ants
The ant-based charging plan algorithm (Figure 4) mainlyincludes these steps as follows
Step 1 Setting up the EVsrsquo parameters Including the EVnumber (ant population) the use habit of EV such as theplug-in and plug-off grid time (can help to get the usablecharging time assume that the car plug-in the grid whencomes home and plug-off the grid when leaves home) thedaily travel miles and the energy need when traveling 100 KM(can help to compute the SOC of the battery) the chargingefficiency the rated charging power and so forth
Step 2 Initializing the pheromone Compute the pheromoneaccording to the day-ahead load forecast data of the trans-former and other parameters using (9)
Step 3 Setting up the maximum iterations 119873119888max and the
ant numbers 119872 of each iteration The fluctuation of the loadcurve is related to the 119872 tightly
Step 4 Loop for iterating in turn of the plug-in time of theEVs Each ant decides the suitable charging time segmentaccording to its parameters and the pheromone of other antsis released
Step 5 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 6 Update the pheromone at the charging time segmentfor other EVs to use
Step 7 Generate the charging scheduling of all EVs
The charging planning pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
119870119897
119871ℎTE
(1 le ℎ lt 1199051 1199052 lt ℎ le 24)
119870ℎ
ℎ+
119870119897
119871ℎTE
(1199051 le ℎ lt 1199052 119871ℎfc le 119875MV)
0 (1199051 le ℎ lt 1199052 119871ℎfc gt 119875MV)
0 (ℎ lt 119879119894PI ℎ gt 119879
119894PO)
(9)
where 1199051 and 1199052 are the intersection of load forecast curveand maximum valley power line of EV charging And theycan be calculated from 119875MV and 119871
ℎ119865 119870119897and 119870
ℎare the
main influence factors of the pheromone and can be adjustedaccording to the coordination object
(3)The Feasibility Analysis of Proposed Algorithm Each EV isa relative independent individual in this algorithm which isan ant in fact The global optimization objects are the sumof all individualsrsquo optimization value So the proof of thealgorithm feasibility is to prove that each EV can reach theoptimal value when it plug in the grid
Assume that 119864(119873) is the sets of all EVs as follows
119864 (119873) = 119890 = (1198901 1198902 119890
119873) 119890119894isin 119864 (119894 le 119873) (10)
International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 7
For all 119894th EV 119890119894isin 119864(119873) set 119878 as the set of usable charging
time segments as follows
119878 = 1198791198941 1198791198942 119879
119894119899(119899 = 119879
119894PO minus 119879119894PI) (11)
For each EV as an individual agent its charging instantwill be arranged in the moment at which the pheromone islow Suppose that 120591(119879
119895) is the pheromone value of the 119895th time
segment In other way the algorithm can be represented asfinding a set of time segments
Using the quick sort algorithm to list 119878 from large to smallaccording to the 120591(119879
119895) of each time segmentThen we can get
a new usable time segments set 119878120591Choose the first119898 time segments to charge and satisfy the
following condition
sumIndex(119878120591)lt119898
119864119894119878120591CH gt 119864
119894RN (12)
where 119898 = 119879119894CH and 119864
119894RN is the real need chargingenergy of 119894th EV If119898 gt 119899 there is no feasible solution and ittell the user to change the charging need If 119898 lt 119899 there is asolution
There are 119869 time segments in all The time complexity ofthis can be calculated as follows
119874 (119895 log2(119895)) (13)
Because 119895 lt 24 the time complexity is in a rangeAnd there are 119873 EVs in all The time complexity of
the sum is 119874(119873) Because 119873 is a finite number the timecomplexity is also in a range In other words within finitetime the solution that is the changing arrangement for theelectric vehicles can be gotten which validates the feasibilityof the algorithm(4)The Suggested Charging Adjustment Algorithm (Figure 5)One character of the power system load is randomnesswhich is difficult to control Another character is the periodicchange of different stages which can be expressed in monthday hour and so forth So the load can be forecastedaccording to the history data but still has some differencewiththe real load The EVs can be a good method to dissolve theload fluctuation in a certain extent so as to reduce the powerbackup Next the charging adjustment algorithm to responsethe load fluctuation is proposedThemain steps are as follows
Step 1 Get the corresponding parameters of the EVs plug inpower grid that mainly include the EV number the chargingstatus of each EV and other parameters of EV itself
Step 2 Get the real load of the current time segment Thealgorithm can get the latest load in process of the simulationtime
Step 3 Compute the pheromone needs to compensateaccording to the real load the forecast load and the loadfluctuation sum using (14)
Step 4 Choose the different charging controlmethod accord-ing to the load fluctuation If the real load is larger than the
forecast load let the EVs charging at the current time segmentstop charge and choose another suitable time segment tocharge considering the constraints of its own If the real loadis less than the forecast load let the EVs charging at the latertime segment move to the current time segment to charge
Step 5 Loop for iterating in turn of the plug-in time of theEVs
Step 6 Compare the total load 119871ℎTE when the current EV
load added and the transformermaximum load power119875119894MTF
if 119871ℎTE surpass the 119875
119894MTF exit the loop
Step 7 Update the pheromone of the load fluctuation forother plug-in EVs
Step 8 Quit the iteration when the fluctuation compensationobject is finished
Step 9 Update the charging scheduling of all EVs as the timeprocess
The charging adjustment pheromone of the 119894th EV at timesegment ℎ can be calculated as follows
120591119894ℎ
(119871ℎ119865
119871ℎ119877
119871ℎTE 119875MV 119879119894PI 119879119894PO)
=
0 (0 le ℎ lt 1)
119870lf
sumℎ
1(119871ℎ119877
minus 119871ℎ119865
) (1 le ℎ le 24 119871
ℎTE le 119875MV)
0 (ℎlt119879119894PI ℎgt119879
119894PO 119871ℎTE gt119875MV)
(14)
where 119870lf denotes the adjust parameters of the load fluctua-tion which is inverse to the load fluctuation sum
5 Simulation Results
Based on the charging loadmodel described in Section 3 nextwe begin to simulate the ant-based coordination chargingalgorithm proposed in Section 4 and make a comparativeanalysis of the performance between free charge mode andcoordination charge mode with different influence parame-ters Furthermore the performance of ASA and PSO is alsocompared
51 Simulation Environment Our simulation environment isset to a 1247 KV distribution transformer in a residentialarea and the initial data of the original forecast load aresimulated according to the actual loads of weather zonesreport published by the Electric Reliability Council of Texas(ERCOT) The rated capacity of the transformer 119875RC is2000KVA Assume that the power factor cos120601 is 085 and theefficiency of the transformer 120578
119879is 095 the maximum load
power 119875MTF can be calculated as follows
119875MTF = 119875RC times cos120601 times 120578119879 (15)
8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Distributed Sensor Networks
119871ℎTE le 119875119894MTF
119871ℎTE le 119875119894MTF
Start
Iterations 119873119888 = 119873119888 + 1 Iterations 119873119888 = 119873119888 + 1
Ant 119870 = 1 Ant 119870 = 1
Ant 119870 = 119870 + 1 Ant 119870 = 119870 + 1
End
Get plug-in EV parameters
Get load fluctuation
Get compensation pheromone
119871ℎ119877 gt 119871ℎ119865
Charging status Charging status
Stop charge
Start charge Find another chargingtime segment
Adjust other chargingtime segments
Update charging status
Pheromone update
Update charging status
Pheromone update
Compensation object Compensation object
Get charging schedule of each EVY
Y
Y
Y
Y
Y
Y
N
NN
N
N
N
N
N
N119873119888 ge 119873119888 max 119873119888 ge 119873119888 max
Figure 5 Ant-based charging adjustment algorithm flow for the load fluctuation
So the maximum load power of the transformer in thispaper is 1615 KW The 24 hours load data of one day is thebasis of the simulation
(1) Load Fluctuation There are many uncertainty factorsinfluence the load and will cause fluctuation in operationwhich can be simply described by the standard normaldistribution [24]The load of time 119905 can be defined as follows
119871 (119905) = 1198711015840 (119905) + 119873 (0 1205902) (16)
where 120590 = 5Considering the private cars that are mainly charged in
the night the dispatching period is set from todayrsquos 12 orsquoclockto next dayrsquos 12 orsquoclock and the dispatch time segment is
one hour The curves of the original load and real load withfluctuation are shown in Figure 6
(2) Simulation Parameters Table 3 shows the simulationparameters of the EV charging Some rated parameters suchas the capacity efficiency end SOC and EV number aredefined as a fixed value Some parameters about the usinghabits are sampled in Monte Carlo method according tothe distribution function Some parameters are adjustable toverify the different performance
Our simulation includes four parts (1) getting the loadcurve with EVs of the free charge mode using the previousparameters (2) getting the load curve with EVs of thecooperated charge mode using an ant-based algorithm torealize the self-organized charging in load valley (3) getting
International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 9
Table 3 Simulation parameters
Parameter ValueBattery capacity 20KwhRated charging Power 3KwhCharging efficiency 90Daily travel miles of EV Monte Carlo samplingEnergy need per 100KM 15KwhStart state of charge (SOC) Computed by (5)End state of charge (SOC) ge90Plug-in grid time Monte Carlo samplingPlug-off gird time Monte Carlo samplingTotal EV number AdjustableEV number of each iteration AdjustableLoad fluctuation compensate proportionby EV Adjustable
12 18 24 6 12900
1000
1100
1200
1300
1400
(h)
(kW
)
Original loadReal load with fluctuation
Figure 6 Original forecast load and real load curve of 1247 KVtransformer
the load curves with EVs using ASA and PSO to makea comparison (4) getting the load curve with EVs usingcharging adjustment algorithm to realize the load fluctuationcompensate
52 Free Charge In the free charge mode the EVs charge inrated power immediately when plug in the power grid and leftwhen the battery is full The whole charging process is out ofcontrol and regulation The simulation results based on theparameters in Table 3 are shown in Figure 7
As displayed in Figure 7 the charging load peak timesegment of the EVs are similar to the power load peak soit will burden the power load and enlarge the peak valleydifferenceAs the proportion of EV load increases the EV freecharging will greatly influence the security of power grid
53 Ant-Based Charging Planning Algorithm for Load ValleyFilling In the coordination charge mode the simulation of
12 18 24 6 12900
1000
1100
1200
1300
1400
1500
1615
1700
(h)
(kW
)
Original loadOriginal load + free EV load (500)Original load + free EV load (1000)
1000EVs free charge
500EVs free charge
Figure 7 Load curve of 500 and 1000 EVs free charge
Table 4 Comparisons between the free charge and coordinatedcharge
Item EVnumber
Originalload
Freechargemode
Coordinatedcharge mode
Peak (KW) 500 137344 148622 137344
Valley (KW) 500 9714 98168 124595
Peak valleydifference (KW) 500 40204 50454 12749
EVs to realize the planned charging at the valley time segmentis just as follows
From Figure 8 it can be seen that the EVs can find thelowest load time segment in its useable time segment when itplug in the gridThe curve is get on the condition of iteratingone car each time which can get more smooth curvesSo the ant-based charging algorithm can realize the loadvalley filling effectively through the pheromone informationexchange
In fact there are more than one car plug-in grid at thesame time So it is necessary to deal with a group of cars ateach communication in order to get better compute speedand lower communication cost From Figure 9 it can be seenthat the iterated cars number of each time will influence theload curve which should be selected according to the totalnumber of EVsWhen the iterated car number is 10 or 20 theload curve fluctuation is small which is better than 50
From Table 4 it can be seen that the ant-based coordina-tion algorithm can reduce the peak valley difference of thepower system which can reduce the start and stop times ofthe generators and improve the safety and economy of thesystem operation
54 Performance Comparisons with Particle Swarm Algo-rithm (PSO) Particle swarm optimization (PSO) algorithmwas developed by Kennedy and Eberhart in 1995 [25]
10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Distributed Sensor Networks
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Iterate one EV each time
Original loadOriginal load + EV load at 15 orsquoclockOriginal load + EV load at 18 orsquoclockOriginal load + EV load at 21 orsquoclockOriginal load + EV load at 12 orsquoclock
Figure 8 Load curve of 500 EVs coordinated charge by iterating onecar each time at different hours
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Original loadOriginal load + EV load (iterate 1 each time)Original load + EV load (iterate 20 each time)Original load + EV load (iterate 50 each time)
Figure 9 Load curve of 500 EVs coordinated charging by iteratingdifferent numbers of cars each time
Table 5 Performance comparisons between the ASA and PSOalgorithms with 500 EVs charging
Item ASA PSO (iterate500 times)
PSO (iterate1500 times)
Program executiontime (S) 017 046 115
Load fluctuation invalley (KW) 3233 5259 3237
which is a kind of heuristic global optimization technologyand belongs to the category of swarm intelligence methods
Original loadOriginal load + EV load with PSO (iterate 500 times)Original load + EV load with PSO (iterate 1500 times)Original load + EV load with ASA
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 10 Load curve of 500 EVs coordinated charge in ASA andPSO
PSO works by ldquoflyingrdquo a population of potential solutionscalled particles through a problemrsquos D-dimensional solutionspace The particles in PSO consist of a D-dimensionalposition vector and velocity vector and also have a fitnessfunction which is required to evaluate its performance Theparticles keep track of the individual extreme values and theglobal extreme value in the solution space until it reaches theiteration number or meet the specified error standard
PSO has the characters of high efficiency and simplicityand has been successfully applied in many areas But it alsomaybe falls into the local minimum in dealing with thediscretization problems
Next we used two methods of PSO to optimize the EVsrsquocharging schedule problem The basic parameters of EVs aresame to the parameters used in theASA and the optimizationobjects are the load valley and theminimumfluctuation in thevalley time segment
(1) First Method In this method we take the usable chargingtime segments of each EV as the solution space If there are500 EVs the dimension of the particle is 500 And each EVhasdifferent usable charging time segments maybe 5ndash11 hours inthe valley time segments
(2) Second Method Each EV has different parameters such asthe plug-in grid time plug-off grid time and the real chargetime We can make a subtotal of these data to reduce thedimension of the optimal solution
According to the real charge time which is calculated bythe charging energy and rated charging power the EVs can bedivided into 7 types According to the EVnumbers can get theobject valley filling time segments which are the 22 orsquoclock offirst day to 10 orsquoclock of the second day if there are 500 EVsThen we take the one type of EV start charging in one valleyfilling time segment as one dimension of the solution whichcan reduce the solution dimensions to 84
International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 11
121260
1280
1300
1320
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 11 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 18 orsquoclock
24
1220
1240
1260
1280
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 12 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 24 orsquoclock
The optimal solution search space of the second methodis smaller than the first one and has better convergence rateNext we will use the second method to make a comparisonwith the ASA
From Figure 10 it can be seen that the ASA can getsimilar optimization load curve with the PSO And the curvewith PSO iterated 1500 times is better than 500 times whichsays that the PSO need more iterated times to get betterperformance
From Table 5 it can be seen that the ASA has lesssimulation time than the PSO if they all reach the similar loadfluctuation difference in valley
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 13 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 6 orsquoclock of the next day
Forecast loadReal loadReal load + (planned) EV charging loadReal load + (adjusted) EV charging load
12 18 24 6 12950
1000
1050
1100
1150
1200
1250
1300
1350
1400
(h)
(kW
)
Figure 14 Different types of load curve of 500 EVs charging adjust-ment for response fluctuation at 12 orsquoclock of the next day
Based on the simulation results we can see that the ASAis suitable for the EVs charging optimization
55 Ant-Based EV Charging Adjustment Algorithm for theLoad Fluctuation Response In this section we evaluated theperformance of the ant-based EV charging adjustment algo-rithm for the load fluctuation response we proposed in thispaper The real load with fluctuation can be computed from(16) and the load fluctuation compensation proportion byEV can be computed from (14) Other simulation parametersare same to above mentioned The different types of loadcurve of 500 EVs charging adjustment for load fluctuation
12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 International Journal of Distributed Sensor Networks
response at different time are shown in Figures 11 12 13 and14 respectively
From Figure 11 it can be seen that at 14 orsquoclock the realload is lower than the forecast load but the real load with theadjusted EV charging load is close to the planning load Thatis to say that the EVs whose planned charging time is laterparticipate in the regulation for the load fluctuation
From Figure 12 it can be seen that at 22 orsquoclock the realload rises significantly above the forecast load but the realloadwith EV charging is smooth relatively It shows that someEVs charging at this time segment change to later segmentsso as to reduce the load increase of this time segment
From Figures 13 and 14 it can be seen that the real EVload charging curve changes with the loadrsquos fluctuation Thecurve of the final real load with EV load response fluctuationis smooth relatively which shows that our swarm algorithmcan effectively deal with the load fluctuation
6 Conclusions and Future Work
In this paper a swarm algorithm for charging coordination ofEVs at the transformer level is presented The advantages ofthe proposed algorithm can be summarized as follows (i) Itdoes not need the centralized decision of the upper level (ii)It can respond effectively to the transformer constraint andthe load fluctuation (iii) Its computation burden is relativelylow thus suitable for large-scale applicationThis paper is ourfirst step in the swarm coordination algorithm in the EVscharging In the future we will extend the swarm algorithmto realize some more complicated applications such as thecoordinated dispatch of EVs charging and wind power
Acknowledgments
This work was supported by the National High-tech RampD(863) Program of China (Grant no 2012AA050803)National Natural Science Foundation of China (Grant no51007058) Research Fund for the Doctoral Program (forPhD Supervisor) of Higher Education of China (Grant no20120073110020) and SMCExcellent Young Faculty Programof Shanghai Jiao Tong University
References
[1] L Bertling O Carlson S Lundmark andD Steen ldquoIntegrationof plug in hybrid electric vehicles and electric vehiclesmdashexperience from Swedenrdquo in Proceedings of IEEE PES GeneralMeeting (PES rsquo10) Minneapolis MN USA July 2010
[2] Y Song X Yang and Z Lu ldquoIntegration of plug-in hybrid andelectric vehicles experience fromChinardquo inProceedings of IEEEPES General Meeting (PES rsquo10) Minneapolis MN USA July2010
[3] K Schneider C Gerkensmeyer M Kintner-Meyer and RFletcher ldquoImpact assessment of plug-in hybrid vehicles onpacific northwest distribution systemsrdquo in Proceedings of IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century (PES rsquo08)Pittsburgh Pa USA July 2008
[4] P Stroehle S Becher S Lamparter A Schuller and CWeinhardt ldquoThe impact of charging strategies for electricvehicles on power distribution networksrdquo in Proceedings of the8th International Conference on the European Energy Market(EEM rsquo11) Zagreb Croatia May 2011
[5] L Pieltain Fernandez T Gomez San Roman R CossentC Mateo Domingo and P Frıas ldquoAssessment of the impactof plug-in electric vehicles on distribution networksrdquo IEEETransactions on Power Systems vol 26 no 1 pp 206ndash213 2011
[6] K Clement-Nyns E Haesen and J Driesen ldquoThe impactof charging plug-in hybrid electric vehicles on a residentialdistribution gridrdquo IEEE Transactions on Power Systems vol 25no 1 pp 371ndash380 2010
[7] V C Gungor B Lu and G P Hancke ldquoOpportunities andchallenges of wireless sensor networks in smart gridrdquo IEEETransactions on Industrial Electronics vol 57 no 10 pp 3557ndash3564 2010
[8] Y Liu ldquoWireless sensor network applications in smart gridrecent trends and challengesrdquo International Journal of Dis-tributed Sensor Networks vol 2012 Article ID 492819 8 pages2012
[9] S Shao M Pipattanasomporn and S Rahman ldquoChallenges ofPHEV penetration to the residential distribution networkrdquo inProceedings of IEEE Power and Energy Society General Meeting(PES rsquo09) Calgary Canada July 2009
[10] K Qian C Zhou M Allan and Y Yuan ldquoModeling of loaddemand due to EV battery charging in distribution systemsrdquoIEEE Transactions on Power Systems vol 26 no 2 pp 802ndash8102011
[11] M D Galus and G A Simon Art ldquoA hierarchical distributedPEV charging control in low voltage distribution grids to ensurenetwork securityrdquo in Power and Energy Society General Meeting2012
[12] Y Cao S Tang C Li et al ldquoAn optimized EV charging modelconsidering TOU price and SOC curverdquo IEEE Transactions onSmart Grid vol 3 no 1 pp 388ndash393 2011
[13] T Logenthiran and D Srinivasan ldquoMulti-agent system formanaging a power distribution system with plug-in hybridelectrical vehicles in smart gridrdquo in Proceedings of IEEE PESInternational Conference on Innovative Smart Grid Technologies-India (ISGT rsquo11) Kollam India December 2011
[14] E L Karfopoulos and N D Hatziargyriou ldquoA multi-agentsystem for controlled charging of a large population of electricvehiclesrdquo IEEE Transactions on Power Systems vol PP no 99 p1 2012
[15] M Saleem G A Di Caro and M Farooq ldquoSwarm intelligencebased routing protocol for wireless sensor networks surveyand future directionsrdquo Information Sciences vol 181 no 20 pp4597ndash4624 2011
[16] H Zhou D Qing X Zhang H Yuan and C Xu ldquoA multiple-dimensional tree routing protocol for multisink wireless sensornetworks based on ant colony optimizationrdquo InternationalJournal of Distributed Sensor Networks vol 2012 Article ID397961 10 pages 2012
[17] Federal Highway Administration US Department of Trans-portation ldquo2009 national household travel surveyrdquo httpnhtsornlgov
[18] M Liu and S FMcLoone ldquoInvestigation of AIMDbased charg-ing strategies for EVs connected to a low-voltage distributionnetworkrdquo in Proceedings of the 2nd International Conference onIntelligent Computing for Sustainable Energy and EnvironmentShanghai China September 2012
International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 13
[19] J Chen Y Zhang and Y Luo ldquoA unified frame of swarmintelligence optimization algorithmrdquo in Knowledge Discoveryand Data Mining vol 135 of Advances in Intelligent and SoftComputing pp 745ndash751 Springer Heidelberg Germany 2012
[20] Y F Zhu and X M Tang ldquoOverview of swarm intelligencerdquoin Proceedings of the International Conference on ComputerApplication and SystemModeling (ICCASM rsquo10) pp 9400ndash9403Taiyuan China October 2010
[21] Y Ding Y He and J Jiang ldquoMulti-robot cooperation methodbased on the ant algorithmrdquo in Swarm Intelligence Symposium(SIS rsquo03) 2003
[22] D Zhang G Xie J Yu and L Wang ldquoAn adaptive task assign-ment method for multiple mobile robots via swarm intelligenceapproachrdquo in Proceedings of IEEE International Symposium onComputational Intelligence in Robotics and Automation (CIRArsquo05) pp 415ndash420 June 2005
[23] MDorigo VManiezzo andA Colorni ldquoAnt system optimiza-tion by a colony of cooperating agentsrdquo IEEE Transactions onSystems Man and Cybernetics Part B vol 26 no 1 pp 29ndash411996
[24] T Michigami and T Ishii ldquoConstruction of fluctuation loadmodel and dynamic simulation with LFC control of DC powersystem and frequency converter interconnectionrdquo in Proceed-ings of IEEEPES Transmission and Distribution Conference andExhibition Asia Pacific pp 382ndash387 October 2002
[25] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks pp 1942ndash1948 Perth Australia December 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of



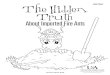





![Implementation Of Load Sharing Using Swarm Roboticsswarm was derived from the formic [20]. The formic generally represents the ants. A group of ants are called Swarm [23]. From the](https://img.dokumen.tips/doc/110x75/5ec4992175ea144c53178dd0/implementation-of-load-sharing-using-swarm-robotics-swarm-was-derived-from-the-formic.jpg)