Embed Size (px)
Citation preview

Quantization of Compressed Sensing Measurements
Ozgur Yılmaz
Department of MathematicsUniversity of British Columbia
Jun 11, 2010

Collaborators
Joint work with:
I Sinan Gunturk (Courant)
I Mark Lammers (UNC Wilmington)
I Alex Powell (Vanderbilt)
I Rayan Saab (UBC)

Motivation: Digital Signal Processing
Inherently analog signals: Audio, images, seismic, etc.
Objective: Use digital technology to store and process analog signals – findefficient digital representations of analog signals.
How this is done - classical approach:
Sampling(I)
Quantization(II)
Compression(III)
Signal f(analog)
{ f(nT): n ∈Ι } { fq(n): n ∈Ι } { bj: j∈Ι' }
A/D conversion: measurement & truncation
A/D conversion: measurement & truncation
Source coding:truncation & compression
(or other processing)

Compressed sensing (CS)
Motivation of CS: If the signal is sparse or compressible, can we combinesampling and compression stages to one compressed sensing stage?
What do we have so far? Sparse signals can be recovered from fewnon-adaptive, linear measurements. Major dimensionality reduction.
Missing link: Devise efficient quantization schemes for “compressedmeasurements”.
I Crucial if we want to compress.
I Little is known...
I This is the subject of this talk.

Compressed sensing
Notations.
I x ∈ RN is k-sparse of x has at most k non-zero entries.
I Σk := {x ∈ RN : x is k-sparse}I Measurement matrix: Φ, an m × N real matrix.
I Measurements: y = Φx (y = Φx + e)
I Dimensional setting: k < m < N.
Objective of CS. Suppose x ∈ Σk or can be well approximated from Σk . Giventhe (noisy) measurements y = Φx + e,
I recover x exactly (approximately),
I in a computationally efficient manner.

Compressed sensing – recovery by `1 minimization
The following “robust recovery” result is crucial for applications of CS (and ourresults in this talk).
Theorem [Candes-Romberg-Tao], also [Donoho]
Assume x ∈ Σk and Φ satisfies RIP(k , δ) for sufficiently small δ. Lety = Φx + e where ‖e‖2 ≤ ε. Define the decoder (BPDN)
∆ε1(y) := arg min ‖z‖1 subject to ‖Φz − y‖2 ≤ ε.
Thenx# = ∆ε
1(y) =⇒ ‖x − x#‖2 ≤ C0ε.
More generally, for any x ∈ RN , ‖x − x#‖2 ≤ C1ε+ C2σk (x)`1√
k.
Remarks.
1. Gaussian random matrices Φ with Φi,j ∼ N (0, 1/m) satisfy RIP of desiredorder.
2. Potential sources for measurement error include quantization error.

Quantization of compressed sensing measurements
It is clear that compressed sensing is very effective for dimension reduction.However, one of the initial goals was to compress.
Need efficient quantization strategies!
Setting. Suppose x ∈ Σk , Φ a compressed sensing matrix. Let y = Φx be themeasurement of x .
Problem. Given a (discrete) quantization alphabet A, e.g., A = dZ (stick tothis alphabet throughout this talk),
x ∈ RN Φ−→ y ∈ Rm Q−→ q ∈ Am ∆Q−→ x# ∈ RN
i.e., find a quantizer Q : Rm 7→ Am and a decoder ∆Q : Am 7→ RN such that
I ‖x −∆Q(q)‖ is small whenever x ∈ Σk , and
I ∆Q is computationally tractable.

Quantization of compressed sensing measurements
It is clear that compressed sensing is very effective for dimension reduction.However, one of the initial goals was to compress.
Need efficient quantization strategies!
Setting. Suppose x ∈ Σk , Φ a compressed sensing matrix. Let y = Φx be themeasurement of x .
Problem. Given a (discrete) quantization alphabet A, e.g., A = dZ (stick tothis alphabet throughout this talk),
x ∈ RN Φ−→ y ∈ Rm Q−→ q ∈ Am ∆Q−→ x# ∈ RN
i.e., find a quantizer Q : Rm 7→ Am and a decoder ∆Q : Am 7→ RN such that
I ‖x −∆Q(q)‖ is small whenever x ∈ Σk , and
I ∆Q is computationally tractable.

Quantization of compressed sensing measurements
It is clear that compressed sensing is very effective for dimension reduction.However, one of the initial goals was to compress.
Need efficient quantization strategies!
Setting. Suppose x ∈ Σk , Φ a compressed sensing matrix. Let y = Φx be themeasurement of x .
Problem. Given a (discrete) quantization alphabet A, e.g., A = dZ (stick tothis alphabet throughout this talk),
x ∈ RN Φ−→ y ∈ Rm Q−→ q ∈ Am ∆Q−→ x# ∈ RN
i.e., find a quantizer Q : Rm 7→ Am and a decoder ∆Q : Am 7→ RN such that
I ‖x −∆Q(q)‖ is small whenever x ∈ Σk , and
I ∆Q is computationally tractable.

Quantization of CS measurements – PCM
The most intuitive quantizer. Round each measurement yj to the nearestelement of A = dZ (Pulse Code Modulation or PCM)
QPCM : y 7→ qPCM.
Note that, setting x#PCM := ∆ε
1(qPCM),
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d√
m
This is counter-intuitive: more measurements =⇒ more error?
Not really! This is an artifact of our RIP-based choice of normalization for themeasurement matrix Φ, i.e., for Φi,j ∼ N (0, 1/m). Dynamic range ofmeasurements vary with m, conflicts with fixed A.
Fixed if we work with Φ such that Φij ∼ N (0, 1). Then
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d

Quantization of CS measurements – PCM
The most intuitive quantizer. Round each measurement yj to the nearestelement of A = dZ (Pulse Code Modulation or PCM)
QPCM : y 7→ qPCM.
Note that, setting x#PCM := ∆ε
1(qPCM),
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d√
m
This is counter-intuitive: more measurements =⇒ more error?
Not really! This is an artifact of our RIP-based choice of normalization for themeasurement matrix Φ, i.e., for Φi,j ∼ N (0, 1/m). Dynamic range ofmeasurements vary with m, conflicts with fixed A.
Fixed if we work with Φ such that Φij ∼ N (0, 1). Then
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d

Quantization of CS measurements – PCM
The most intuitive quantizer. Round each measurement yj to the nearestelement of A = dZ (Pulse Code Modulation or PCM)
QPCM : y 7→ qPCM.
Note that, setting x#PCM := ∆ε
1(qPCM),
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d√
m
This is counter-intuitive: more measurements =⇒ more error?
Not really! This is an artifact of our RIP-based choice of normalization for themeasurement matrix Φ, i.e., for Φi,j ∼ N (0, 1/m). Dynamic range ofmeasurements vary with m, conflicts with fixed A.
Fixed if we work with Φ such that Φij ∼ N (0, 1). Then
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d

Quantization of CS measurements – PCM
The most intuitive quantizer. Round each measurement yj to the nearestelement of A = dZ (Pulse Code Modulation or PCM)
QPCM : y 7→ qPCM.
Note that, setting x#PCM := ∆ε
1(qPCM),
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d√
m
This is counter-intuitive: more measurements =⇒ more error?
Not really! This is an artifact of our RIP-based choice of normalization for themeasurement matrix Φ, i.e., for Φi,j ∼ N (0, 1/m). Dynamic range ofmeasurements vary with m, conflicts with fixed A.
Fixed if we work with Φ such that Φij ∼ N (0, 1). Then
‖y − qPCM‖2 ≤d
2
√m
robust recovery=⇒ ‖x − x#
PCM‖2 . d

Quantization of CS measurements – PCM
I Still, the accuracy of reconstruction given by ‖x#PCM‖ . d .
I No improvement if we increase the number of measurements m!
I Of course, this is just an upper bound, but...
Why should we expect the approximation to improve?If (once) the support of x is known (recovered), then we have effectivelyoversampled x (m > k measurements for a k-dimensional signal)!
I In traditional oversampled quantization theory, we can do significantlybetter!

Quantization of CS measurements – PCM
I Still, the accuracy of reconstruction given by ‖x#PCM‖ . d .
I No improvement if we increase the number of measurements m!
I Of course, this is just an upper bound, but...
10 20 50 100
10−8
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 10
mea
n l 2−
norm
of t
he e
rror
!
PCM " l1
Why should we expect the approximation to improve?If (once) the support of x is known (recovered), then we have effectivelyoversampled x (m > k measurements for a k-dimensional signal)!
I In traditional oversampled quantization theory, we can do significantlybetter!

Quantization of CS measurements – PCM
I Still, the accuracy of reconstruction given by ‖x#PCM‖ . d .
I No improvement if we increase the number of measurements m!
I Of course, this is just an upper bound, but...
10 20 50 100
10−8
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 10
mea
n l 2−
norm
of t
he e
rror
!
PCM " l1#$ (order 1)c !−1
Why should we expect the approximation to improve?If (once) the support of x is known (recovered), then we have effectivelyoversampled x (m > k measurements for a k-dimensional signal)!
I In traditional oversampled quantization theory, we can do significantlybetter!

Quantization of CS measurements – PCM
I Still, the accuracy of reconstruction given by ‖x#PCM‖ . d .
I No improvement if we increase the number of measurements m!
I Of course, this is just an upper bound, but...
10 20 50 100
10−8
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 10
mea
n l 2−
norm
of t
he e
rror
!
PCM " l1#$ (order 1)#$ (order 2)c !−r, r=1,2
Why should we expect the approximation to improve?If (once) the support of x is known (recovered), then we have effectivelyoversampled x (m > k measurements for a k-dimensional signal)!
I In traditional oversampled quantization theory, we can do significantlybetter!

Quantization of CS measurements – PCM
I Still, the accuracy of reconstruction given by ‖x#PCM‖ . d .
I No improvement if we increase the number of measurements m!
I Of course, this is just an upper bound, but...
10 20 50 100
10−8
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 10
mea
n l 2−
norm
of t
he e
rror
!
PCM " l1#$ (order 1)#$ (order 2)c !−r, r=1,2
Why should we expect the approximation to improve?If (once) the support of x is known (recovered), then we have effectivelyoversampled x (m > k measurements for a k-dimensional signal)!
I In traditional oversampled quantization theory, we can do significantlybetter!

Quantization of CS measurements – PCM
I Still, the accuracy of reconstruction given by ‖x#PCM‖ . d .
I No improvement if we increase the number of measurements m!
I Of course, this is just an upper bound, but...
10 20 50 100
10−8
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 10
mea
n l 2−
norm
of t
he e
rror
!
PCM " l1#$ (order 1)#$ (order 2)c !−r, r=1,2
Why should we expect the approximation to improve?If (once) the support of x is known (recovered), then we have effectivelyoversampled x (m > k measurements for a k-dimensional signal)!
I In traditional oversampled quantization theory, we can do significantlybetter!

Compressed sensing: Undersampled or oversampled?
Consider
26664∗∗∗∗∗
37775| {z }
y
=
2666664− −
3z}|{•
4z}|{• −
6z}|{• − −
− − • • − • − −− − • • − • − −− − • • − • − −− − • • − • − −
3777775| {z }
Φ
26666666664
00••0•00
37777777775| {z }
xIf (once) the support T = {3, 4, 6} is known (recovered)26664∗∗∗∗∗
37775| {z }
y
=
26664• • •• • •• • •• • •• • •
37775| {z }
ΦT
24 •••
35| {z }
xT
Observe:
I Rows of ΦT is a frame for Rk with m > k vectors.
I Measurements yj are associated frame coefficients.
I This is a redundant frame quantization problem.

Perspective and limitations of PCM
I For processing purposes, one should keep in mind that the CSmeasurements are a redundant encoding of some low-dimensional signal.
I If a quantization scheme is not effective for quantizing redundant frameexpansions, it will not be effective in the CS setting.
I The following theorem gives a lower bound on the PCM-approximationerror even if the support of sparse x is known and even if thereconstruction is done optimally.
Theorem (Goyal-Vetterli-Thao)
Let E be an m × k real matrix, and let ∆opt be an optimal decoder. Then[E ‖x −∆opt(QPCM(Ex))‖2
2
]1/2
&k λ−1d
where the “oversampling rate” λ := m/k and the expectation is wrt aprobability measure on a bounded K ⊂ Rk that is, e.g., abs. continuous.

General frame quantization
Finite frames. A collection E = {ej}m1 in Rk is a frame for Rk if
A‖x‖22 ≤
m∑j=1
|〈x , ej〉|2 ≤ B‖x‖22, ∀x ∈ Rk .
Identify E with the m × k matrix E whose rows are eT1 , . . . , e
Tm . Then,
I E is a frame for Rk if and only if E is full rank.
I The frame bounds: A = σ2min(E ) and B = σ2
max(E ).
I The entries of y = Ex are the frame coefficients of x ∈ Rk .
I The columns of any left inverse F of E is a dual frame of E . In this case,we can reconstruct x from y via x = Fy .
I The Moore-Penrose pseudo-inverse of E , given by
Fcan = E † = (E∗E )−1E∗
is the canonical dual of E .

General frame quantization
Problem. Let E be a frame for Rk . Want to quantize the frame coefficientsy = Ex of x ∈ Rk : As before, let A = dZ, and let Q be a quantizer, i.e.,
Q : y ∈ Rm 7→ q ∈ Am.
Pick any left inverse (dual) F of E and set x = Fq. Then
approximation error = x − x = F (y − q).
Two criteria for quantizer design
I “Noise shaping” in this context: choose q such that y − q is close toKer(F ).
I Which dual F of E?

Σ∆ quantization for finite frames
Fix the quantization method as r th-order Σ∆ quantization:
(∆ru)j = yj − qj .
Here qj can be chosen using the greedy rule which minimizes uj givenuj−1, . . . , uj−r and yj if A is sufficiently large. In this case,
y − qΣ∆ = Dru, with ‖u‖∞ ≤ d/2
where D =
266666664
1 0 0 0 · · · 0−1 1 0 0 · · · 0
0 −1 1 0 · · · 0...
. . .. . .
. . .. . .
...0 0 · · · −1 1 00 0 · · · 0 −1 1
377777775m×m
.
Note also that ‖y − qΣ∆‖∞ .r d (this will be important later).

Σ∆ quantization for finite frames – approximation error
From last slide: y − qΣ∆ = Dru with ‖u‖∞ . d .
Reconstruct with some dual F of E : xΣ∆ = FqΣ∆. Then
x − xΣ∆ = F (y − qΣ∆) = FDru.
I Use Σ∆ quantization if E admits a dual frame F whose columns varysmoothly. Accuracy: O(λ−r ) when r = 1, 2 where λ = m/k.(Benedetto-Powell-Y)
I Even Σ∆ schemes of order 1 and 2 are significantly superior to PCM.(BPY, later by Bodmann-Paulsen, Boufounos-Oppenheim,...).
I In these early results, the focus is on canonical-dual reconstructions.

Σ∆ quantization for finite frames – approximation error
From last slide: y − qΣ∆ = Dru with ‖u‖∞ . d .
Reconstruct with some dual F of E : xΣ∆ = FqΣ∆. Then
x − xΣ∆ = F (y − qΣ∆) = FDru.
One way to bound the approximation error:
‖x − xΣ∆‖ ≤ ‖u‖∞∑‖(FDr )j‖
I Use Σ∆ quantization if E admits a dual frame F whose columns varysmoothly. Accuracy: O(λ−r ) when r = 1, 2 where λ = m/k.(Benedetto-Powell-Y)
I Even Σ∆ schemes of order 1 and 2 are significantly superior to PCM.(BPY, later by Bodmann-Paulsen, Boufounos-Oppenheim,...).
I In these early results, the focus is on canonical-dual reconstructions.

Σ∆ quantization for finite frames – approximation error
From last slide: y − qΣ∆ = Dru with ‖u‖∞ . d .
Reconstruct with some dual F of E : xΣ∆ = FqΣ∆. Then
x − xΣ∆ = F (y − qΣ∆) = FDru.
One way to bound the approximation error:
‖x − xΣ∆‖ ≤ ‖u‖∞∑‖(FDr )j‖ ← frame variation
I Use Σ∆ quantization if E admits a dual frame F whose columns varysmoothly. Accuracy: O(λ−r ) when r = 1, 2 where λ = m/k.(Benedetto-Powell-Y)
I Even Σ∆ schemes of order 1 and 2 are significantly superior to PCM.(BPY, later by Bodmann-Paulsen, Boufounos-Oppenheim,...).
I In these early results, the focus is on canonical-dual reconstructions.

Σ∆ quantization for finite frames – approximation error
From last slide: y − qΣ∆ = Dru with ‖u‖∞ . d .
Reconstruct with some dual F of E : xΣ∆ = FqΣ∆. Then
x − xΣ∆ = F (y − qΣ∆) = FDru.
One way to bound the approximation error:
‖x − xΣ∆‖ ≤ ‖u‖∞∑‖(FDr )j‖ ← frame variation
I Use Σ∆ quantization if E admits a dual frame F whose columns varysmoothly. Accuracy: O(λ−r ) when r = 1, 2 where λ = m/k.(Benedetto-Powell-Y)
I Even Σ∆ schemes of order 1 and 2 are significantly superior to PCM.(BPY, later by Bodmann-Paulsen, Boufounos-Oppenheim,...).
I In these early results, the focus is on canonical-dual reconstructions.

Σ∆ quantization for finite frames – approximation error
From last slide: y − qΣ∆ = Dru with ‖u‖∞ . d .
Reconstruct with some dual F of E : xΣ∆ = FqΣ∆. Then
x − xΣ∆ = F (y − qΣ∆) = FDru.
One way to bound the approximation error:
‖x − xΣ∆‖ ≤ ‖u‖∞∑‖(FDr )j‖ ← frame variation
I Use Σ∆ quantization if E admits a dual frame F whose columns varysmoothly. Accuracy: O(λ−r ) when r = 1, 2 where λ = m/k.(Benedetto-Powell-Y)
I Even Σ∆ schemes of order 1 and 2 are significantly superior to PCM.(BPY, later by Bodmann-Paulsen, Boufounos-Oppenheim,...).
I In these early results, the focus is on canonical-dual reconstructions.

Σ∆ quantization for finite frames – Sobolev duals
Problem 1. Extension to higher-order schemes is non-trivial! (Negative resultfor, e.g., harmonic frames together with their canonical duals for schemes oforder 3 or higher by Lammers-Powell-Y.)
Remedy. Construct suitable alternative duals!
How? If we work with the `2 norm:
‖x − xΣ∆‖2 ≤ ‖FDr‖op‖u‖2.
Seek a dual F that minimizes ‖FDr‖op.
Solution is the rth-order Sobolev dual of E , introduced byBlum-Lammers-Powell-Y, given explicitly by
Fsob,r = (D−rE )†D−r .
Theorem [BLPY].
If E is sufficiently smooth (e.g., sampled from a piecewise-C 1 frame path), anr th-order Σ∆ scheme produces an accuracy of O(λ−r ) if the reconstruction isdone using Fsob,r .

Σ∆ quantization for finite frames – Sobolev duals
Problem 1. Extension to higher-order schemes is non-trivial! (Negative resultfor, e.g., harmonic frames together with their canonical duals for schemes oforder 3 or higher by Lammers-Powell-Y.)
Remedy. Construct suitable alternative duals!
How? If we work with the `2 norm:
‖x − xΣ∆‖2 ≤ ‖FDr‖op‖u‖2.
Seek a dual F that minimizes ‖FDr‖op.
Solution is the rth-order Sobolev dual of E , introduced byBlum-Lammers-Powell-Y, given explicitly by
Fsob,r = (D−rE )†D−r .
Theorem [BLPY].
If E is sufficiently smooth (e.g., sampled from a piecewise-C 1 frame path), anr th-order Σ∆ scheme produces an accuracy of O(λ−r ) if the reconstruction isdone using Fsob,r .

Σ∆ quantization for finite frames – Sobolev duals
Problem 1. Extension to higher-order schemes is non-trivial! (Negative resultfor, e.g., harmonic frames together with their canonical duals for schemes oforder 3 or higher by Lammers-Powell-Y.)
Remedy. Construct suitable alternative duals!
How? If we work with the `2 norm:
‖x − xΣ∆‖2 ≤ ‖FDr‖op‖u‖2.
Seek a dual F that minimizes ‖FDr‖op.
Solution is the rth-order Sobolev dual of E , introduced byBlum-Lammers-Powell-Y, given explicitly by
Fsob,r = (D−rE )†D−r .
Theorem [BLPY].
If E is sufficiently smooth (e.g., sampled from a piecewise-C 1 frame path), anr th-order Σ∆ scheme produces an accuracy of O(λ−r ) if the reconstruction isdone using Fsob,r .

Σ∆ quantization for finite frames – Sobolev duals
Problem 1. Extension to higher-order schemes is non-trivial! (Negative resultfor, e.g., harmonic frames together with their canonical duals for schemes oforder 3 or higher by Lammers-Powell-Y.)
Remedy. Construct suitable alternative duals!
How? If we work with the `2 norm:
‖x − xΣ∆‖2 ≤ ‖FDr‖op‖u‖2.
Seek a dual F that minimizes ‖FDr‖op.
Solution is the rth-order Sobolev dual of E , introduced byBlum-Lammers-Powell-Y, given explicitly by
Fsob,r = (D−rE )†D−r .
Theorem [BLPY].
If E is sufficiently smooth (e.g., sampled from a piecewise-C 1 frame path), anr th-order Σ∆ scheme produces an accuracy of O(λ−r ) if the reconstruction isdone using Fsob,r .

Σ∆ quantization for random frames – Sobolev duals
Problem 2. What if the original frame E is not smooth, like our ΦT which is a“Gaussian random frame”.
This is our main problem. We will show that Sobolev duals can still be used
for Σ∆ quantization of Gaussian random frames.

Σ∆ quantization for random frames – Sobolev duals
Problem 2. What if the original frame E is not smooth, like our ΦT which is a“Gaussian random frame”.
This is our main problem. We will show that Sobolev duals can still be used
for Σ∆ quantization of Gaussian random frames.
−4 −2 0 2 4−3
−2
−1
0
1
2
3
Gaussian frame in R2

Σ∆ quantization for random frames – Sobolev duals
Problem 2. What if the original frame E is not smooth, like our ΦT which is a“Gaussian random frame”.
This is our main problem. We will show that Sobolev duals can still be used
for Σ∆ quantization of Gaussian random frames.
−4 −2 0 2 4−3
−2
−1
0
1
2
3
Gaussian frame in R2

Σ∆ quantization for random frames – Sobolev duals
Problem 2. What if the original frame E is not smooth, like our ΦT which is a“Gaussian random frame”.
This is our main problem. We will show that Sobolev duals can still be used
for Σ∆ quantization of Gaussian random frames.
−4 −2 0 2 4−3
−2
−1
0
1
2
3
−0.04 −0.02 0 0.02 0.04−0.03
−0.02
−0.01
0
0.01
0.02
0.03
Gaussian frame in R2 Its canonical dual

Σ∆ quantization for random frames – Sobolev duals
Problem 2. What if the original frame E is not smooth, like our ΦT which is a“Gaussian random frame”.
This is our main problem. We will show that Sobolev duals can still be used
for Σ∆ quantization of Gaussian random frames.
−4 −2 0 2 4−3
−2
−1
0
1
2
3
−0.1 −0.05 0 0.05 0.1 0.150
0.02
0.04
0.06
0.08
0.1
0.12
Gaussian frame in R2 Its Sobolev dualof order r = 1

Σ∆ quantization for random frames – Sobolev duals
A generic error bound.
Let E be an m × k full-rank matrix. If y = Ex is quantized via a (stable)r th-order Σ∆ scheme, and xΣ∆ = Fsob,rq, then
‖x − xΣ∆‖2 .rd√
m
σmin(D−rE ).
In other words, we need to control σmin(D−rE ) as a function of theoversampling rate λ = m/k .
Rest of the talk: Focus on the case when E is an m × k Gaussian randommatrix, i.e., Eij ∼ N (0, 1).
How does σmin(D−rE ) behave when E is Gaussian random matrix
depending on m, k, and r?

Σ∆ quantization for random frames – Sobolev duals
A generic error bound.
Let E be an m × k full-rank matrix. If y = Ex is quantized via a (stable)r th-order Σ∆ scheme, and xΣ∆ = Fsob,rq, then
‖x − xΣ∆‖2 .rd√
m
σmin(D−rE ).
In other words, we need to control σmin(D−rE ) as a function of theoversampling rate λ = m/k .
Rest of the talk: Focus on the case when E is an m × k Gaussian randommatrix, i.e., Eij ∼ N (0, 1).
How does σmin(D−rE ) behave when E is Gaussian random matrix
depending on m, k, and r?

Least (non-zero) singular value of D−rE .
Some important facts:
I For an m × k Gaussian E (in fact, also for sub-Gaussian), it is known[Rudelson-Vershynin] that, with high probability,
σmin(E ) ≈√
m −√
k − 1.
I Singular values of D: explicitly known (related to DCT-VIII, e.g., Strang).
I Eigenvalues of D∗rDr can be estimated from the eigenvalues of (D∗D)r
using Weyl’s inequality. (Gunturk-Lammers-Powell-Saab-Y — GLPSY fromnow on).
I In particular,σmin(D−r ) ≈r 1

Least (non-zero) singular value of D−rE .
Some important facts:
I For an m × k Gaussian E (in fact, also for sub-Gaussian), it is known[Rudelson-Vershynin] that, with high probability,
σmin(E ) ≈√
m −√
k − 1.
I Singular values of D: explicitly known (related to DCT-VIII, e.g., Strang).
I Eigenvalues of D∗rDr can be estimated from the eigenvalues of (D∗D)r
using Weyl’s inequality. (Gunturk-Lammers-Powell-Saab-Y — GLPSY fromnow on).
I In particular,σmin(D−r ) ≈r 1

Least (non-zero) singular value of D−rE .
Some important facts:
I For an m × k Gaussian E (in fact, also for sub-Gaussian), it is known[Rudelson-Vershynin] that, with high probability,
σmin(E ) ≈√
m −√
k − 1.
I Singular values of D: explicitly known (related to DCT-VIII, e.g., Strang).
I Eigenvalues of D∗rDr can be estimated from the eigenvalues of (D∗D)r
using Weyl’s inequality. (Gunturk-Lammers-Powell-Saab-Y — GLPSY fromnow on).
I In particular,σmin(D−r ) ≈r 1

Σ∆ quantization for random frames – Sobolev duals
Try the product bound:
σmin(D−rE ) ≥ σmin(D−r )σmin(E ).
Using the observations above, this gives:
‖x − xΣ∆‖2 .r d ,
This is not different from what we had from PCM-quantized measurementsusing `1-minimization decoding. Can’t we do better?
Theorem I [GLPSY]
Let Eij ∼ N (0, 1). For any α ∈ (0, 1), if λ := mk &α,r (log m)1/(1−α), then
σmin(D−rE ) &r λα(r− 1
2 )√
m
with probability at least 1− exp(−c ′mλ−α). Hence,
‖x − xΣ∆‖2 .rd
λα(r− 12 ).

Σ∆ quantization for random frames – Sobolev duals
Try the product bound:
σmin(D−rE ) ≥ σmin(D−r )σmin(E ).
Using the observations above, this gives:
‖x − xΣ∆‖2 .r d ,
This is not different from what we had from PCM-quantized measurementsusing `1-minimization decoding. Can’t we do better?
Theorem I [GLPSY]
Let Eij ∼ N (0, 1). For any α ∈ (0, 1), if λ := mk &α,r (log m)1/(1−α), then
σmin(D−rE ) &r λα(r− 1
2 )√
m
with probability at least 1− exp(−c ′mλ−α). Hence,
‖x − xΣ∆‖2 .rd
λα(r− 12 ).

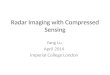
Singular values of σmin(D−rE ) – numerical experiment
100 10110−4
10−2
100
102
104
! = m/k
1σmin(D−rE)
r=0r=1r=2r=3r=4
k = 50, 1 ≤ λ ≤ 25, Eij ∼ N (0, 1),√
mσmin(D−rE) .r λ
−α(r− 12 ).

Proof of Theorem I
Main ingredients of the proof:
I Weyl’s inequality for the singular value estimates, in particular to estimatethe singular values of D−r .
I Unitary invariance of the i.i.d. Gaussian measure. Reduces the problem toestimating σmin(ΣE ) where Σ is diagonal with Σii are estimated asdescribed above.
I Concentration of measure for ΣE : estimate
P{γ‖x‖2 ≤ ‖ΣEx‖2 ≤ θ‖x‖2}.
I Pass to the singular values of ΣE by using a standard net argument.

Implications for compressed sensing quantization
Goal: Use Σ∆ quantization for compressed sensing measurements. Moreprecisely, with k < m < N, let:
I Φ: an m × N Gaussian CS measurement matrix.
I x ∈ Σk : a k-sparse vector in RN , supported on T .
I y = Φx : CS measurement of x
I qΣ∆ = y : Σ∆-quantized (r th-order) measurements.
Problem 1. Can we estimate the support T of x from qΣ∆?
I If yes, then recall: y = Φx = ΦT xT , where ΦT is m × k Gaussian randommatrix.
I Thus Theorem I applies for each x with high probability.
Problem 2. Can we obtain a uniform guarantee, i.e., have Theorem I hold for
each submatrix ΦT (with high probability)?

Implications for compressed sensing quantization
Goal: Use Σ∆ quantization for compressed sensing measurements. Moreprecisely, with k < m < N, let:
I Φ: an m × N Gaussian CS measurement matrix.
I x ∈ Σk : a k-sparse vector in RN , supported on T .
I y = Φx : CS measurement of x
I qΣ∆ = y : Σ∆-quantized (r th-order) measurements.
Problem 1. Can we estimate the support T of x from qΣ∆?
I If yes, then recall: y = Φx = ΦT xT , where ΦT is m × k Gaussian randommatrix.
I Thus Theorem I applies for each x with high probability.
Problem 2. Can we obtain a uniform guarantee, i.e., have Theorem I hold for
each submatrix ΦT (with high probability)?

Implications for compressed sensing quantization
Goal: Use Σ∆ quantization for compressed sensing measurements. Moreprecisely, with k < m < N, let:
I Φ: an m × N Gaussian CS measurement matrix.
I x ∈ Σk : a k-sparse vector in RN , supported on T .
I y = Φx : CS measurement of x
I qΣ∆ = y : Σ∆-quantized (r th-order) measurements.
Problem 1. Can we estimate the support T of x from qΣ∆?
I If yes, then recall: y = Φx = ΦT xT , where ΦT is m × k Gaussian randommatrix.
I Thus Theorem I applies for each x with high probability.
Problem 2. Can we obtain a uniform guarantee, i.e., have Theorem I hold for
each submatrix ΦT (with high probability)?

Answers
Answer 1. Yes! This follows from the robust recovery result for the `1 decoder.
Proposition.
If |xj | &r d for all j ∈ T , then the largest k entries of x# = ∆ε1(qΣ∆) are
supported on T .
Answer 2. Yes! This follows using a union bound.
Theorem II [GLPSY]
Let Φ be a Gaussian random matrix. If λ &α,r (log N)1/(1−α), Theorem I holdsfor ΦT for all T with |T | ≤ k w.h.p. on the draw of Φ.

Answers
Answer 1. Yes! This follows from the robust recovery result for the `1 decoder.
Proposition.
If |xj | &r d for all j ∈ T , then the largest k entries of x# = ∆ε1(qΣ∆) are
supported on T .
Answer 2. Yes! This follows using a union bound.
Theorem II [GLPSY]
Let Φ be a Gaussian random matrix. If λ &α,r (log N)1/(1−α), Theorem I holdsfor ΦT for all T with |T | ≤ k w.h.p. on the draw of Φ.

Σ∆ quantization for compressed sensing
In light of all these results, we propose Σ∆ quantization and a two-stagerecovery procedure for compressed sensing:
1. Coarse recovery: `1-minimization (or any other robust recoveryprocedure) applied to qΣ∆ yields an initial, “coarse” approximationx#(qΣ∆) of x , and in particular, the exact (or otherwise approximate)support T of x .
2. Fine recovery: Sobolev dual of the frame ΦT applied to qΣ∆ yields afiner, final approximation xΣ∆ of x .

Σ∆ quantization for compressed sensing
In light of all these results, we propose Σ∆ quantization and a two-stagerecovery procedure for compressed sensing:
1. Coarse recovery: `1-minimization (or any other robust recoveryprocedure) applied to qΣ∆ yields an initial, “coarse” approximationx#(qΣ∆) of x , and in particular, the exact (or otherwise approximate)support T of x .
2. Fine recovery: Sobolev dual of the frame ΦT applied to qΣ∆ yields afiner, final approximation xΣ∆ of x .

Σ∆ quantization for compressed sensing
In light of all these results, we propose Σ∆ quantization and a two-stagerecovery procedure for compressed sensing:
1. Coarse recovery: `1-minimization (or any other robust recoveryprocedure) applied to qΣ∆ yields an initial, “coarse” approximationx#(qΣ∆) of x , and in particular, the exact (or otherwise approximate)support T of x .
2. Fine recovery: Sobolev dual of the frame ΦT applied to qΣ∆ yields afiner, final approximation xΣ∆ of x .

Σ∆ quantization for compressed sensing
In light of all these results, we propose Σ∆ quantization and a two-stagerecovery procedure for compressed sensing:
1. Coarse recovery: `1-minimization (or any other robust recoveryprocedure) applied to qΣ∆ yields an initial, “coarse” approximationx#(qΣ∆) of x , and in particular, the exact (or otherwise approximate)support T of x .
2. Fine recovery: Sobolev dual of the frame ΦT applied to qΣ∆ yields afiner, final approximation xΣ∆ of x .
Combining all these:

Σ∆ quantization for compressed sensing
In light of all these results, we propose Σ∆ quantization and a two-stagerecovery procedure for compressed sensing:
1. Coarse recovery: `1-minimization (or any other robust recoveryprocedure) applied to qΣ∆ yields an initial, “coarse” approximationx#(qΣ∆) of x , and in particular, the exact (or otherwise approximate)support T of x .
2. Fine recovery: Sobolev dual of the frame ΦT applied to qΣ∆ yields afiner, final approximation xΣ∆ of x .
Combining all these:
Theorem III [GLPSY]
With high probability on the initial draw of Φ and uniformly for all k-sparse xthat satisfy the above size condition, we have
‖x − xΣ∆‖2 .rd
(m/k)α(r− 12 )
if m &α,r k(log N)1/(1−α).

Decoder Performance on Sparse Signals
10 20 30 40 50 60 70 80 90 100
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 10
mea
n l 2−
norm
of t
he e
rror
λ
PCM → l1
PCM → l1 → F
can
Σ∆ (r=1) → l1 → F
sob,1
Σ∆ (r=2) → l1 → F
sob,2
Σ∆ (r=3) → l1 → F
sob,3
cλ−rk1/2, r=0.5,1,2
5 10 15 20 25 30 35 40 45 50
10−6
10−4
10−2
100
performance of various quantization/decoding schemes, k = 20
mea
n l 2−
norm
of t
he e
rror
λ
PCM → l1
PCM → l1 → F
can
Σ∆ (r=1) → l1 → F
sob,1
Σ∆ (r=2) → l1 → F
sob,2
Σ∆ (r=3) → l1 → F
sob,3
cλ−rk1/2, r=0.5,1,2

Rate-distortion issues
Implications regarding the dependence of the approximation error on thebit-budget?
Need to use finite alphabet quantizers.
I Signals of interest in K := {x ∈ ΣNk : A ≤ |xj | ≤ ρ, ∀j ∈ T}, with A� ρ.
I We use a Br -bit uniform quantizer with the largest allowable step-size, sayδr , for our support recovery result to hold.
I Above, choose Br = Br (ρ) so that the associated Σ∆ quantizer does notoverload
The approximation error (distortion) DΣ∆ after the fine recovery stage via Sobolevduals:
DΣ∆ .r λ−α(r−1/2)δr ≈
λ−α(r−1/2)A
2r+1/2.
How about PCM? Same step size δr along with `1 decoder requires roughly thesame number of bits Br , but provides the distortion bound
DPCM . δr ≈A
2r+1/2.

Rate-distortion issues
Implications regarding the dependence of the approximation error on thebit-budget?
Need to use finite alphabet quantizers.
I Signals of interest in K := {x ∈ ΣNk : A ≤ |xj | ≤ ρ, ∀j ∈ T}, with A� ρ.
I We use a Br -bit uniform quantizer with the largest allowable step-size, sayδr , for our support recovery result to hold.
I Above, choose Br = Br (ρ) so that the associated Σ∆ quantizer does notoverload
The approximation error (distortion) DΣ∆ after the fine recovery stage via Sobolevduals:
DΣ∆ .r λ−α(r−1/2)δr ≈
λ−α(r−1/2)A
2r+1/2.
How about PCM? Same step size δr along with `1 decoder requires roughly thesame number of bits Br , but provides the distortion bound
DPCM . δr ≈A
2r+1/2.

Rate-distortion issues
Implications regarding the dependence of the approximation error on thebit-budget?
Need to use finite alphabet quantizers.
I Signals of interest in K := {x ∈ ΣNk : A ≤ |xj | ≤ ρ, ∀j ∈ T}, with A� ρ.
I We use a Br -bit uniform quantizer with the largest allowable step-size, sayδr , for our support recovery result to hold.
I Above, choose Br = Br (ρ) so that the associated Σ∆ quantizer does notoverload
The approximation error (distortion) DΣ∆ after the fine recovery stage via Sobolevduals:
DΣ∆ .r λ−α(r−1/2)δr ≈
λ−α(r−1/2)A
2r+1/2.
How about PCM? Same step size δr along with `1 decoder requires roughly thesame number of bits Br , but provides the distortion bound
DPCM . δr ≈A
2r+1/2.

Σ∆ Quantization for Compressed Sensing
Pros
1. More accurate than any known quantization scheme in this setting (evenwhen sophisticated recovery algorithms are employed).
2. Modular: If the fine recovery stage is not available or impractical, thenthe standard (coarse) recovery procedure is applicable as is.
3. Progressive: If new measurements arrive (in any given order), noiseshaping can be continued on these measurements as long as the state ofthe system (r real values for an r th order scheme) has been stored.
4. Universal: It uses no information about the measurement matrix or thesignal.
(Potential) ConsMore work for reconstruction. Out-of-band noise sensitivity to be sortedout as well as extension to compressible signals (work in progress).

Σ∆ Quantization for Compressed Sensing
Pros
1. More accurate than any known quantization scheme in this setting (evenwhen sophisticated recovery algorithms are employed).
2. Modular: If the fine recovery stage is not available or impractical, thenthe standard (coarse) recovery procedure is applicable as is.
3. Progressive: If new measurements arrive (in any given order), noiseshaping can be continued on these measurements as long as the state ofthe system (r real values for an r th order scheme) has been stored.
4. Universal: It uses no information about the measurement matrix or thesignal.
(Potential) ConsMore work for reconstruction. Out-of-band noise sensitivity to be sortedout as well as extension to compressible signals (work in progress).

Σ∆ Quantization for Compressed Sensing
Pros
1. More accurate than any known quantization scheme in this setting (evenwhen sophisticated recovery algorithms are employed).
2. Modular: If the fine recovery stage is not available or impractical, thenthe standard (coarse) recovery procedure is applicable as is.
3. Progressive: If new measurements arrive (in any given order), noiseshaping can be continued on these measurements as long as the state ofthe system (r real values for an r th order scheme) has been stored.
4. Universal: It uses no information about the measurement matrix or thesignal.
(Potential) ConsMore work for reconstruction. Out-of-band noise sensitivity to be sortedout as well as extension to compressible signals (work in progress).

Σ∆ Quantization for Compressed Sensing
Pros
1. More accurate than any known quantization scheme in this setting (evenwhen sophisticated recovery algorithms are employed).
2. Modular: If the fine recovery stage is not available or impractical, thenthe standard (coarse) recovery procedure is applicable as is.
3. Progressive: If new measurements arrive (in any given order), noiseshaping can be continued on these measurements as long as the state ofthe system (r real values for an r th order scheme) has been stored.
4. Universal: It uses no information about the measurement matrix or thesignal.
(Potential) ConsMore work for reconstruction. Out-of-band noise sensitivity to be sortedout as well as extension to compressible signals (work in progress).

Σ∆ Quantization for Compressed Sensing
Pros
1. More accurate than any known quantization scheme in this setting (evenwhen sophisticated recovery algorithms are employed).
2. Modular: If the fine recovery stage is not available or impractical, thenthe standard (coarse) recovery procedure is applicable as is.
3. Progressive: If new measurements arrive (in any given order), noiseshaping can be continued on these measurements as long as the state ofthe system (r real values for an r th order scheme) has been stored.
4. Universal: It uses no information about the measurement matrix or thesignal.
(Potential) ConsMore work for reconstruction. Out-of-band noise sensitivity to be sortedout as well as extension to compressible signals (work in progress).

Σ∆ Quantization for Compressed Sensing
Pros
1. More accurate than any known quantization scheme in this setting (evenwhen sophisticated recovery algorithms are employed).
2. Modular: If the fine recovery stage is not available or impractical, thenthe standard (coarse) recovery procedure is applicable as is.
3. Progressive: If new measurements arrive (in any given order), noiseshaping can be continued on these measurements as long as the state ofthe system (r real values for an r th order scheme) has been stored.
4. Universal: It uses no information about the measurement matrix or thesignal.
(Potential) ConsMore work for reconstruction. Out-of-band noise sensitivity to be sortedout as well as extension to compressible signals (work in progress).