Embed Size (px)
Citation preview
Jan Flusser, Filip Sroubek, Barbara Zitova
Institute of Information Theory and AutomationAcademy of Sciences of the Czech Republic
Prague
Handling BlurImage Restoration
Handling Blur - ICPR 2016 1
Contents• Non-blind deconvolution
– Wiener, Energy minimization, regularization
• Blind deconvolution
– MAP, VB
• Multichannel (multiframe)
– Super-resolution
• Space-variant blind deconvolution
– Patch-wise, Parametric, Object motion, Conversion to space-invariant
• Hybrid methods
– Fusion approach, High-speed cameras, Inertial sensors
Handling Blur - ICPR 2016 2
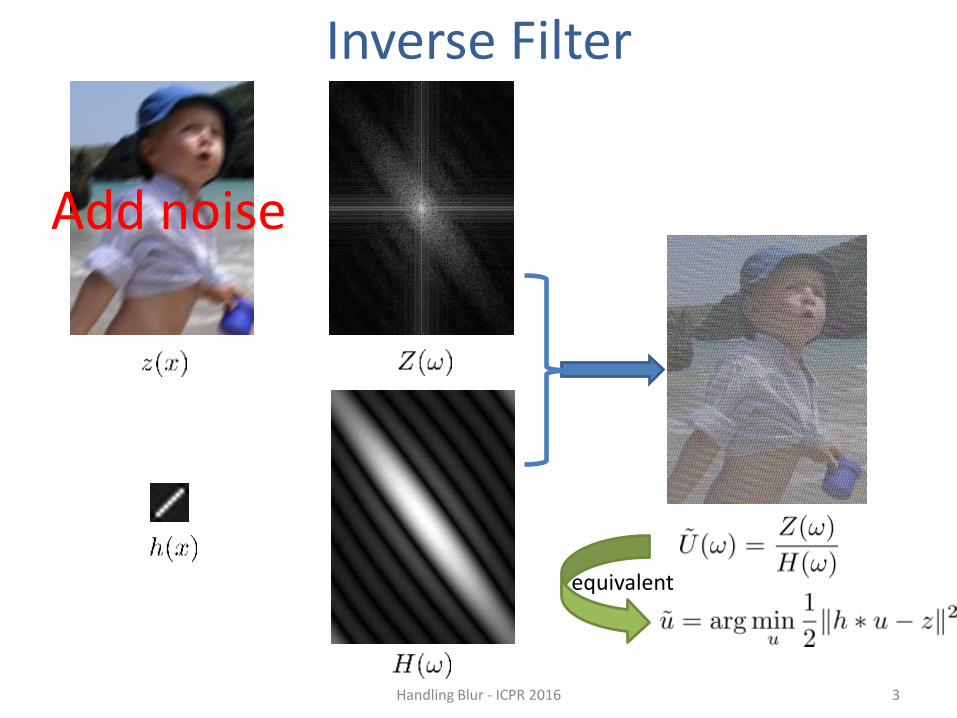
Inverse Filter
Handling Blur - ICPR 2016 3
Add noise
equivalent
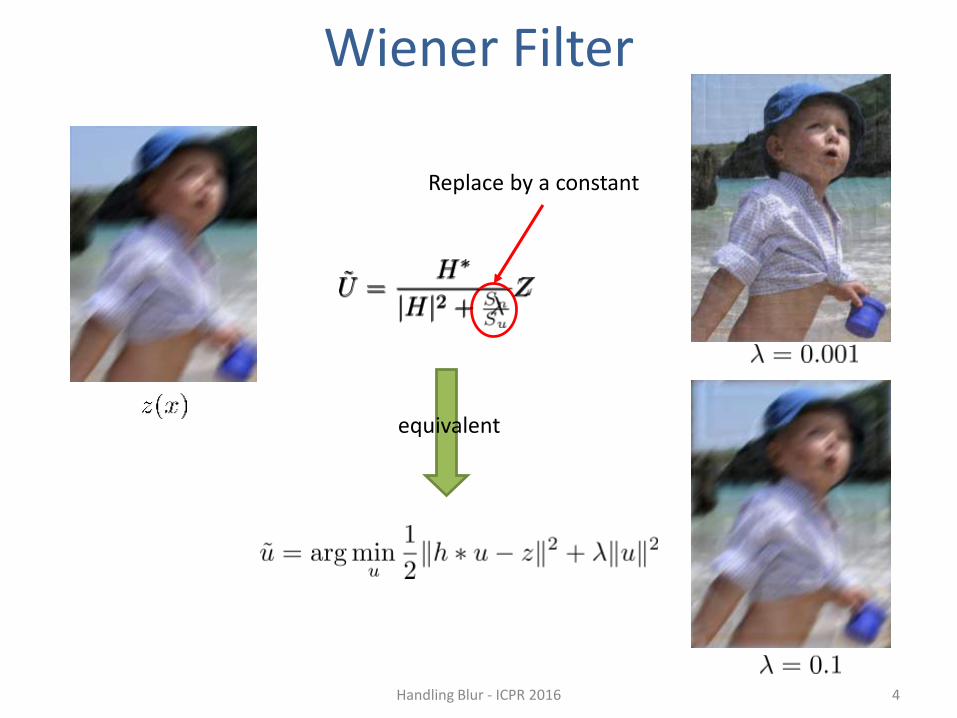
Wiener Filter
Handling Blur - ICPR 2016 4
Ratio of power spectraReplace by a constant
equivalent
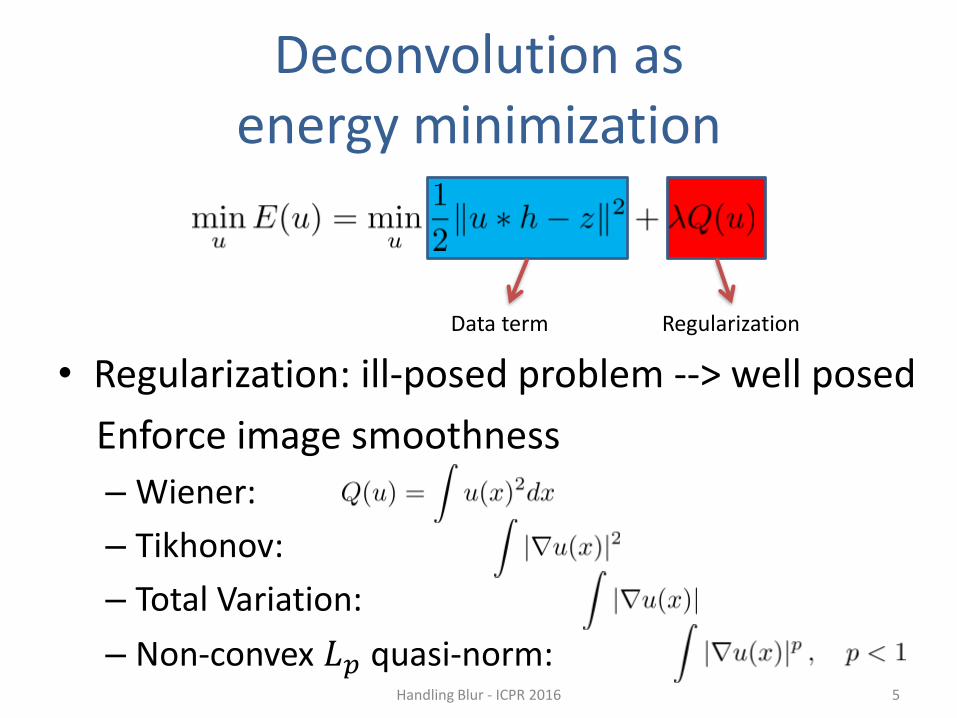
Deconvolution as energy minimization
• Regularization: ill-posed problem --> well posed
Enforce image smoothness
– Wiener:
– Tikhonov:
– Total Variation:
– Non-convex 𝐿𝑝 quasi-norm:Handling Blur - ICPR 2016 5
Data term Regularization
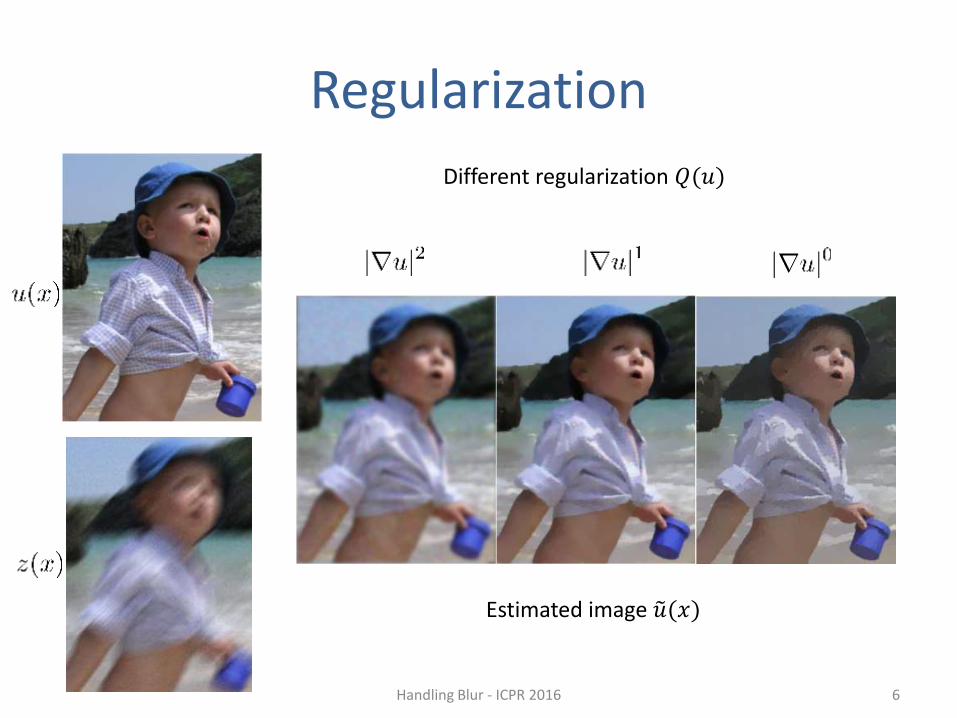
Regularization
Handling Blur - ICPR 2016 6
Different regularization 𝑄(𝑢)
Estimated image 𝑢(𝑥)
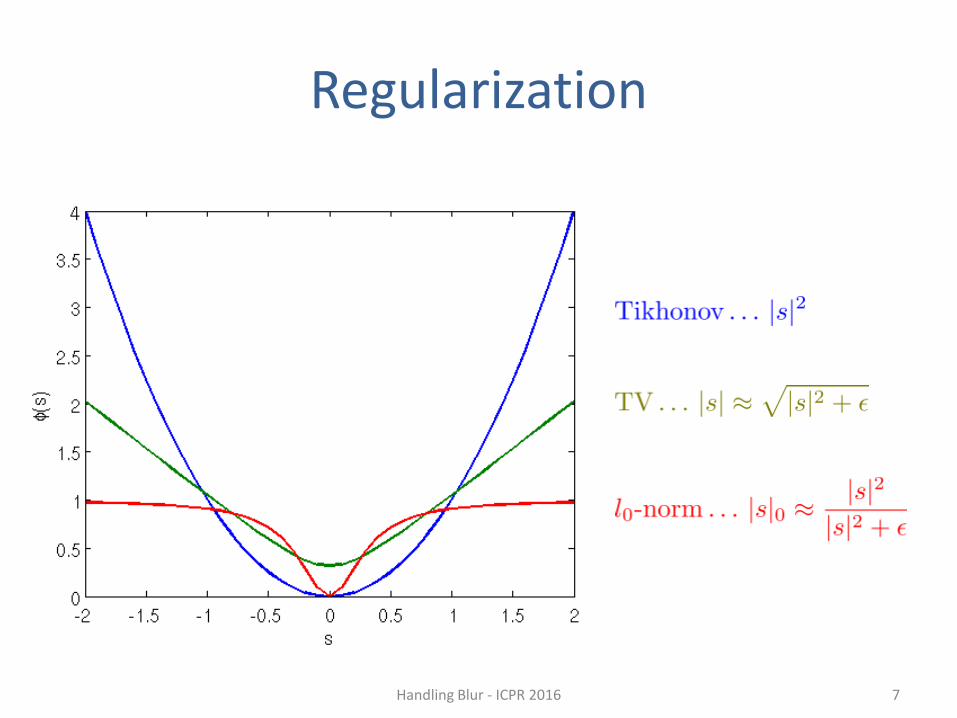
Regularization
Handling Blur - ICPR 2016 7
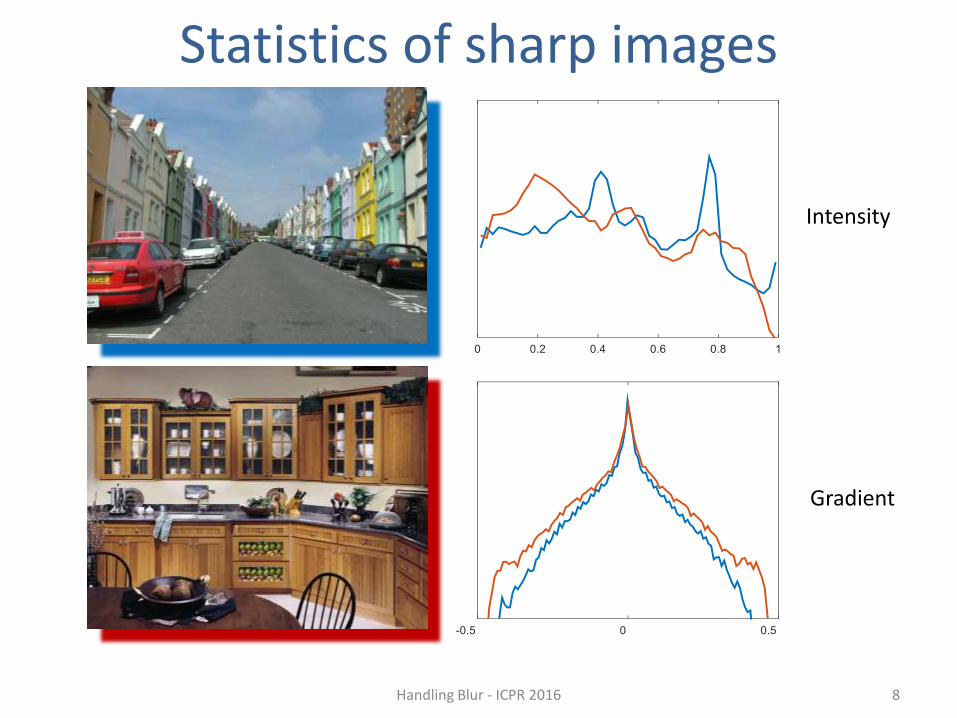
Statistics of sharp images
Handling Blur - ICPR 2016 8
Intensity
Gradient

Statistics of blurred images
Handling Blur - ICPR 2016 9
Intensity
Gradient
How to tackle the blind case?
• When the blur kernel ℎ(𝑥) is not known.
• One is tempted to:
1) Add blur regularization
2) Perform alternating minimization
Handling Blur - ICPR 2016 10
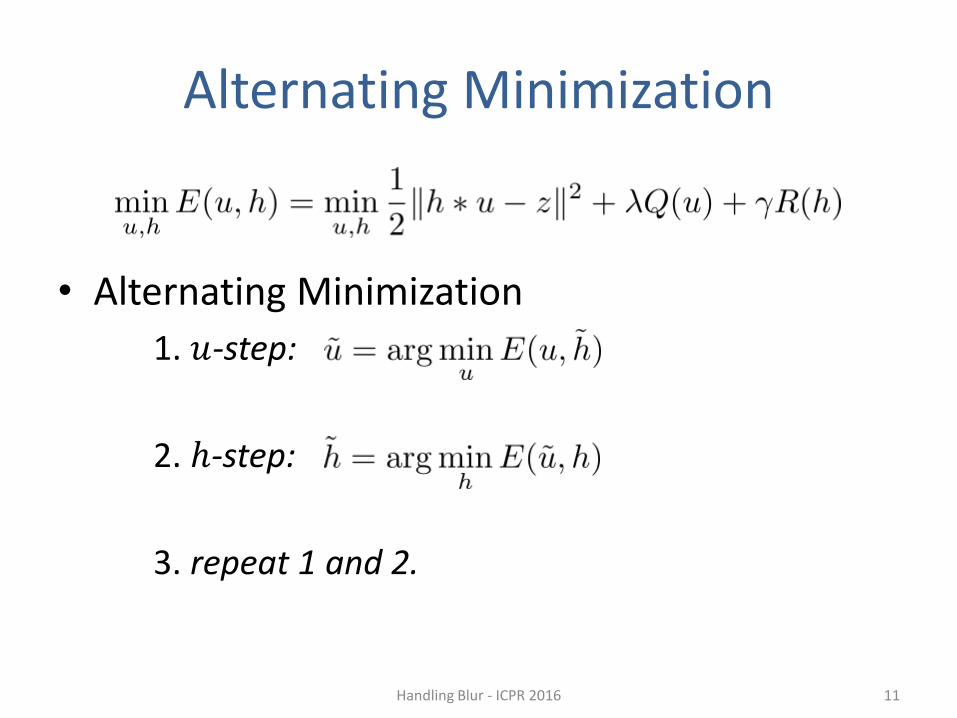
Alternating Minimization
• Alternating Minimization
1. 𝑢-step:
2. ℎ-step:
3. repeat 1 and 2.
Handling Blur - ICPR 2016 11
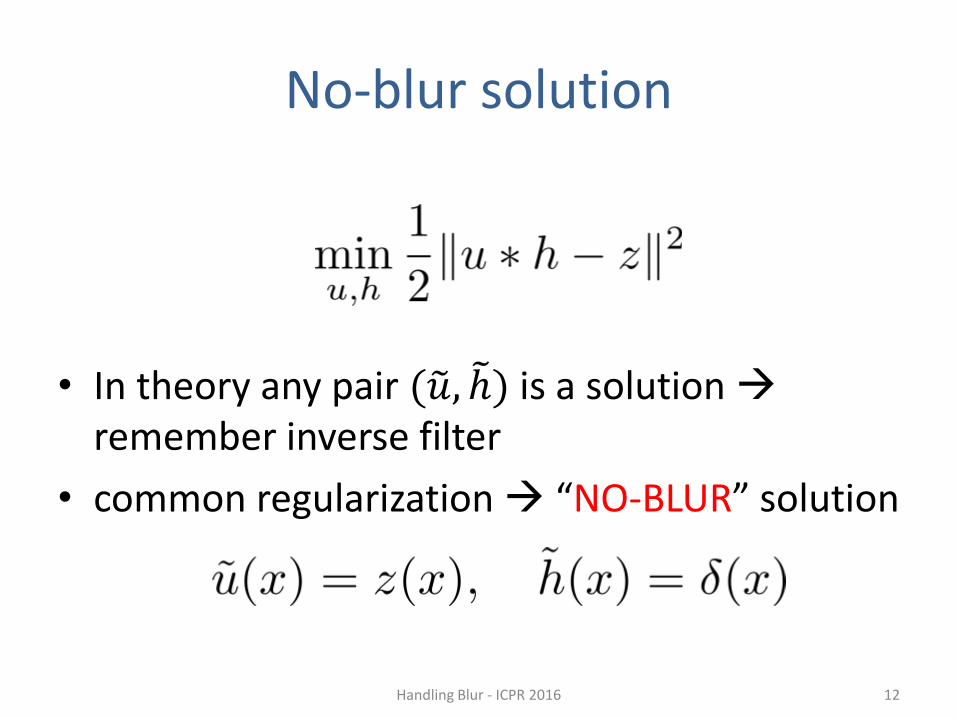
• In theory any pair (𝑢, ෨ℎ) is a solution remember inverse filter
• common regularization “NO-BLUR” solution
No-blur solution
Handling Blur - ICPR 2016 12
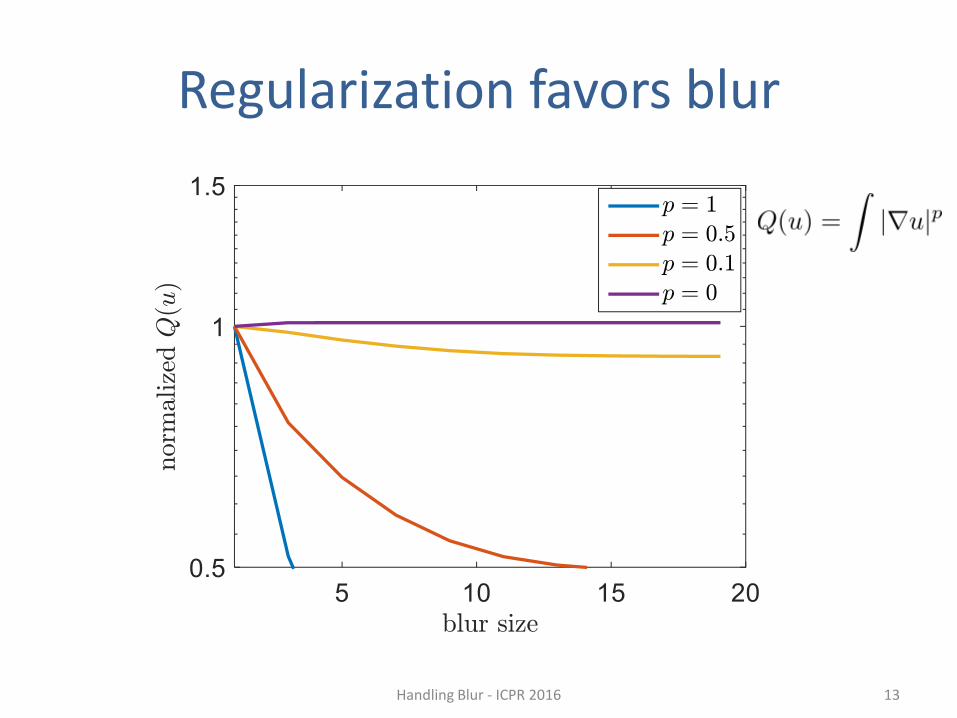
Regularization favors blur
Handling Blur - ICPR 2016 13
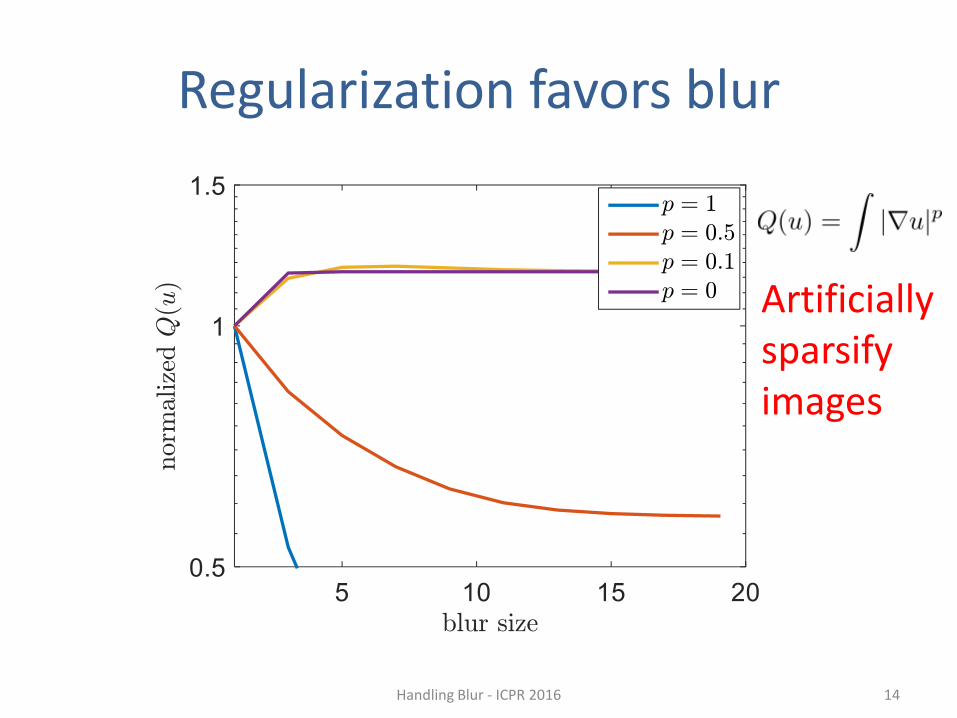
Regularization favors blur
Handling Blur - ICPR 2016 14
Artificially sparsifyimages
We need tricks!
• To avoid “no-blur” solution:
– Artificial sharpening
– Remove spikes
– Adjusting priors on the fly
– Hierarchical approach
Handling Blur - ICPR 2016 15
Chan TIP1998 Shan SigGraph08Cho SigGraph 09Xu ECCV09, 13Almeida TIP10Krishnan 11Zhong 13Sun 13Michael 14Perrone 15Pan 16
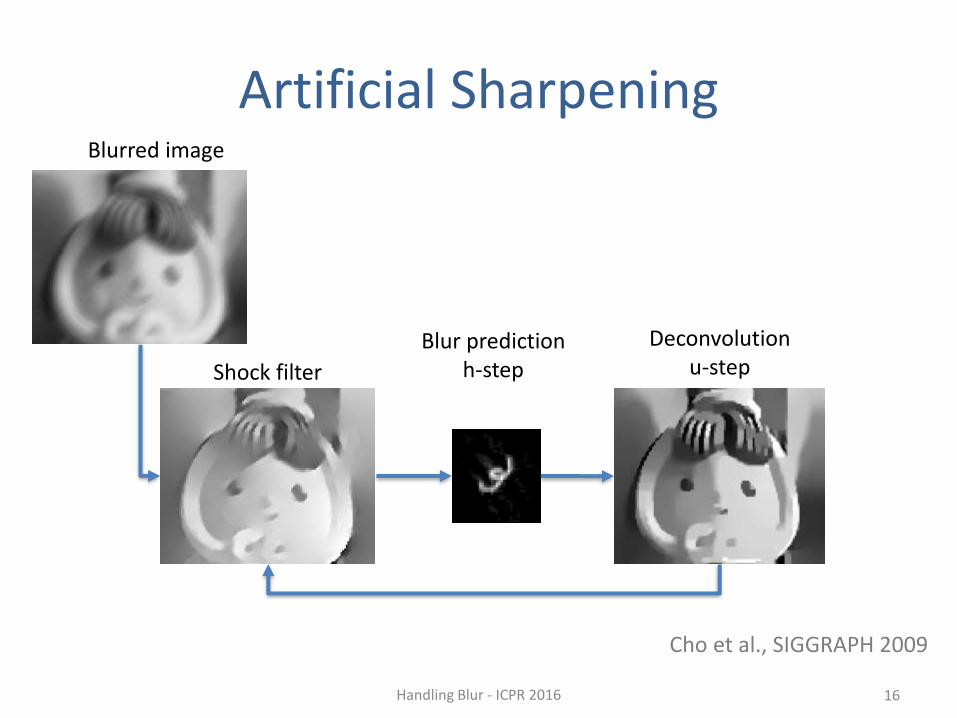
Artificial Sharpening
16
Shock filter
Blur predictionh-step
Deconvolutionu-step
Blurred image
Cho et al., SIGGRAPH 2009
Handling Blur - ICPR 2016
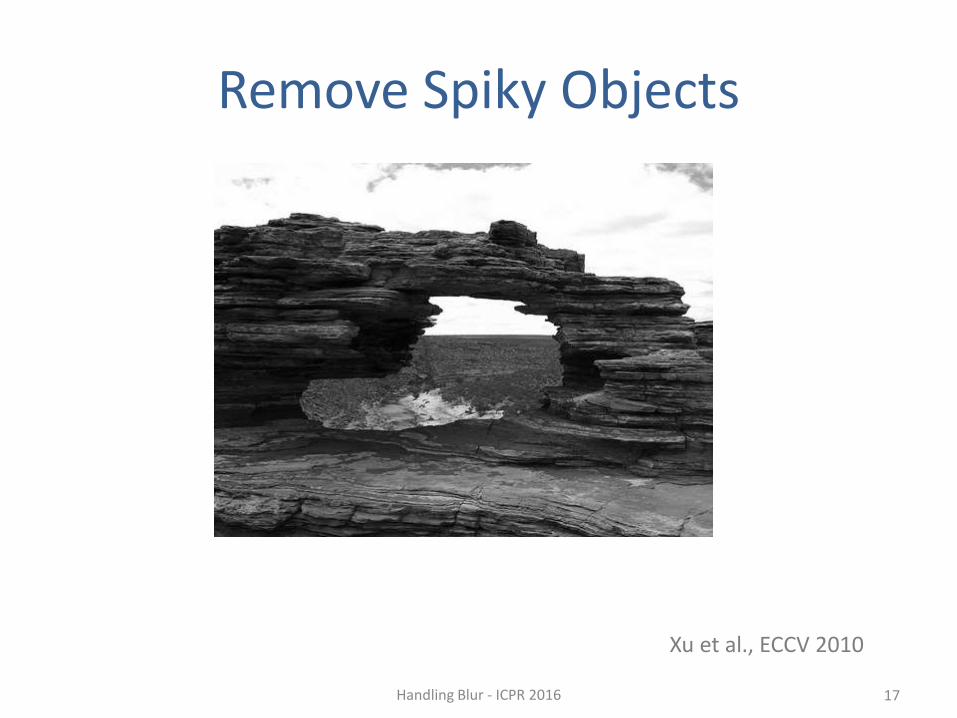
Remove Spiky Objects
17
Xu et al., ECCV 2010
Handling Blur - ICPR 2016
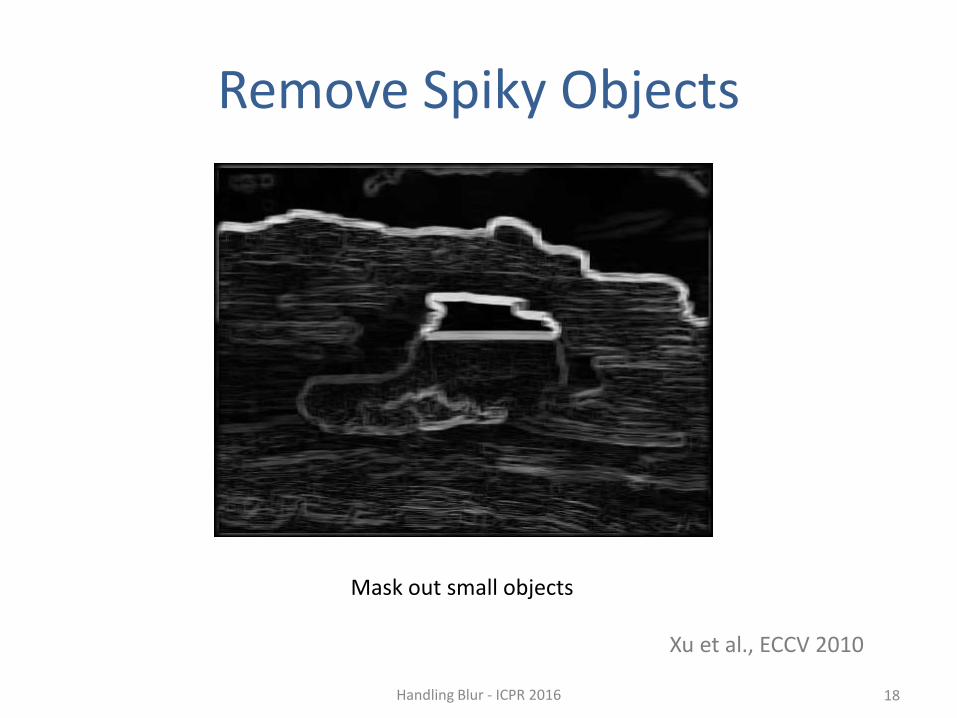
Remove Spiky Objects
18
Mask out small objects
Xu et al., ECCV 2010
Handling Blur - ICPR 2016
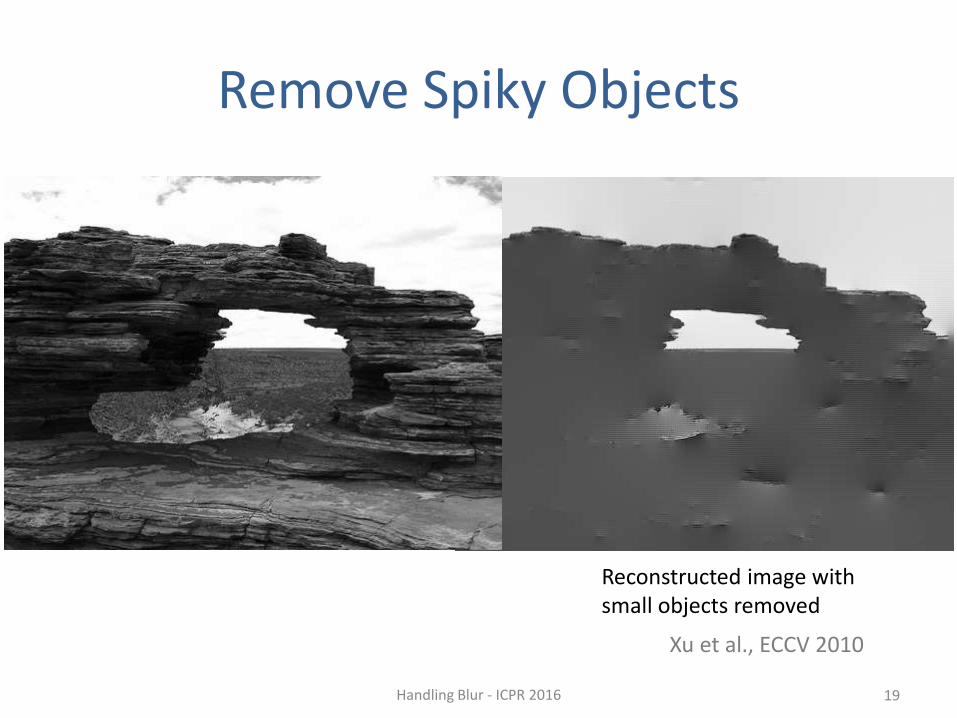
Remove Spiky Objects
19
Reconstructed image with small objects removed
Xu et al., ECCV 2010
Handling Blur - ICPR 2016
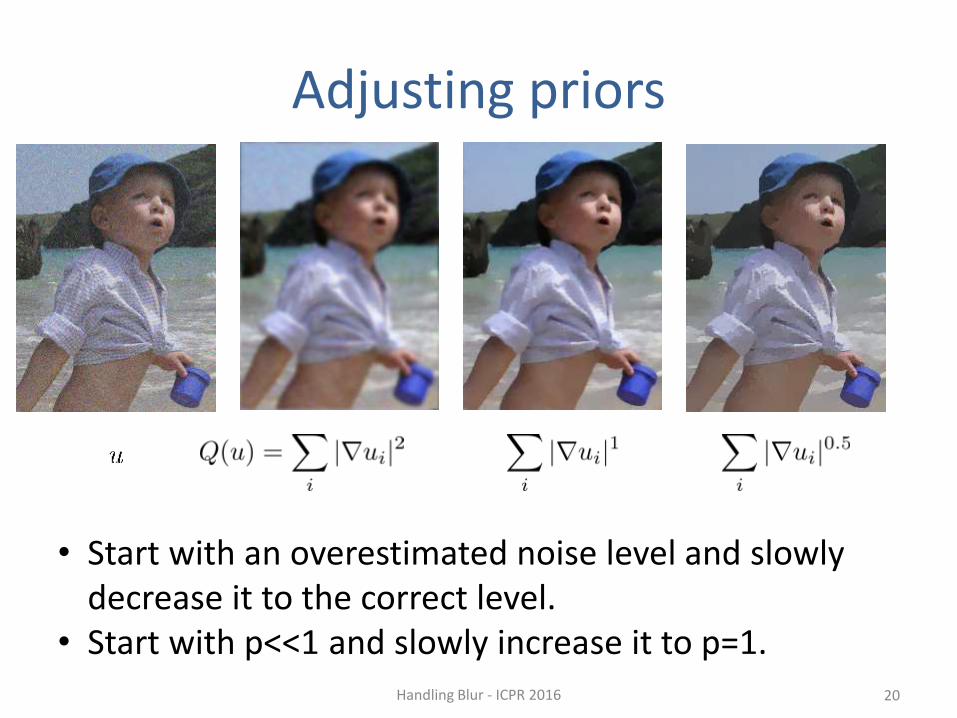
Adjusting priors
20
• Start with an overestimated noise level and slowly decrease it to the correct level.
• Start with p<<1 and slowly increase it to p=1. Handling Blur - ICPR 2016
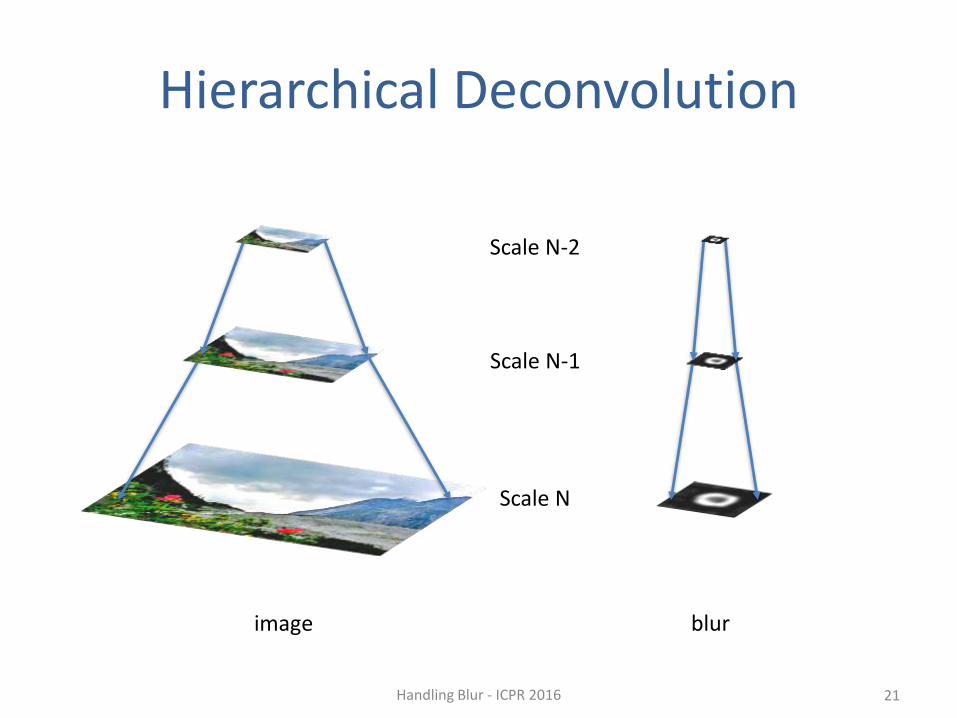
Hierarchical Deconvolution
21
Scale N-1
Scale N-2
Scale N
image blur
Handling Blur - ICPR 2016
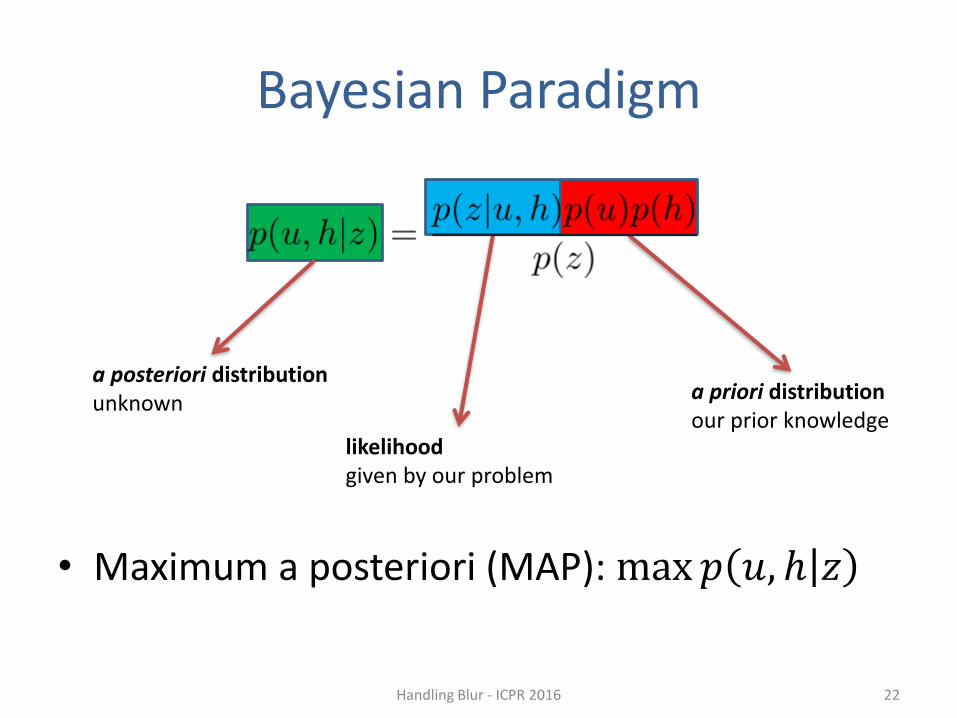
• Maximum a posteriori (MAP): max𝑝 𝑢, ℎ 𝑧
Bayesian Paradigm
a posteriori distributionunknown
likelihoodgiven by our problem
a priori distributionour prior knowledge
22Handling Blur - ICPR 2016
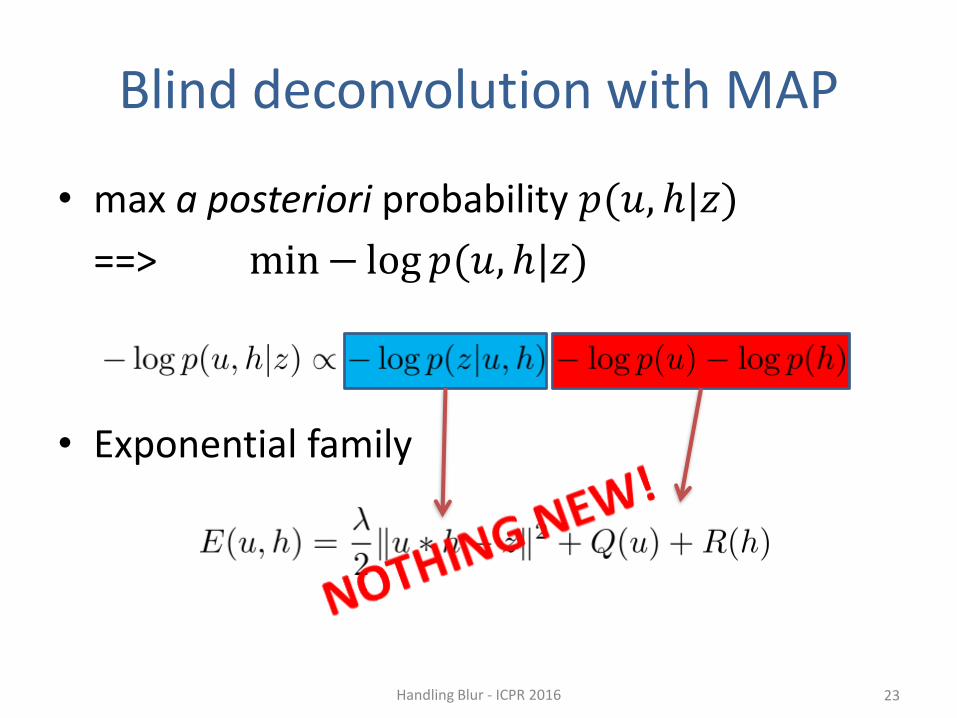
• max a posteriori probability 𝑝(𝑢, ℎ|𝑧)
==> min− log 𝑝(𝑢, ℎ|𝑧)
• Exponential family
Blind deconvolution with MAP
23Handling Blur - ICPR 2016

Bayesian Paradigm revisited
• Marginalize the posterior
• Maximize the marginalized prob.
• and then maximize the posterior
Handling Blur - ICPR 2016 24
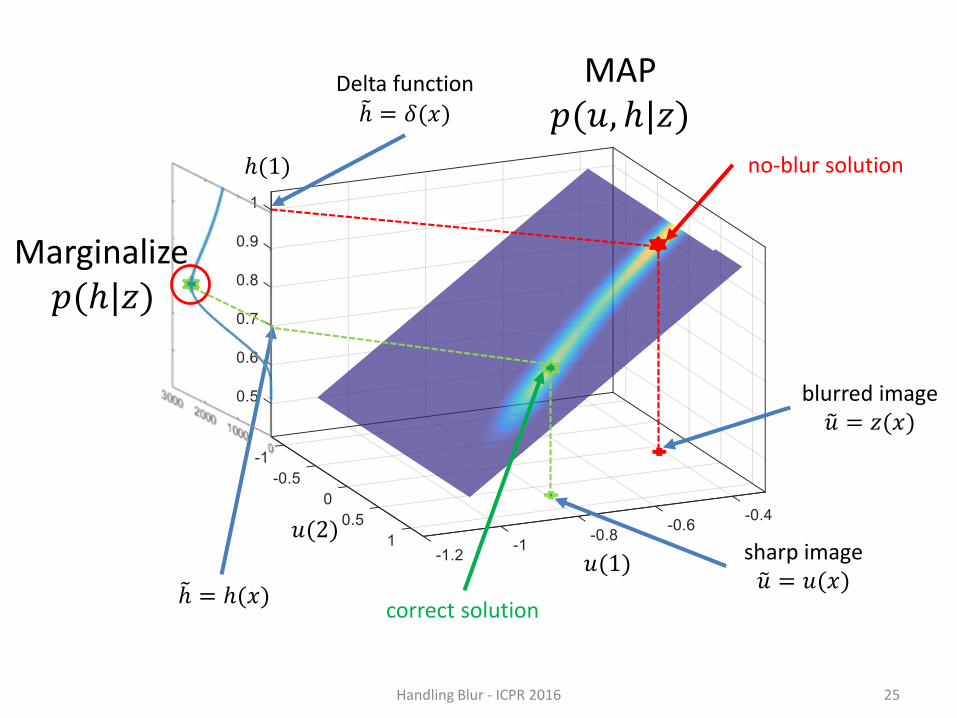
Handling Blur - ICPR 2016 25
𝑢(1)
𝑢(2)
ℎ(1)
blurred image𝑢 = 𝑧(𝑥)
sharp image 𝑢 = 𝑢(𝑥)
no-blur solution
correct solution
Delta function෨ℎ = 𝛿(𝑥)
෨ℎ = ℎ(𝑥)
MAP𝑝(𝑢, ℎ|𝑧)
Marginalize𝑝(ℎ|𝑧)
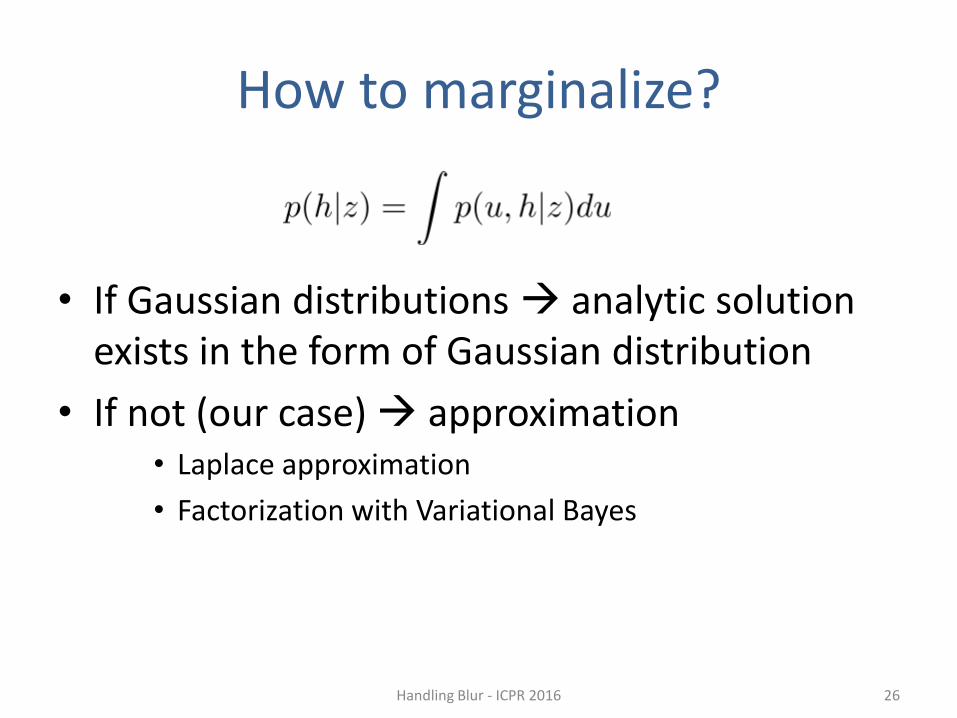
How to marginalize?
• If Gaussian distributions analytic solution exists in the form of Gaussian distribution
• If not (our case) approximation • Laplace approximation
• Factorization with Variational Bayes
Handling Blur - ICPR 2016 26

Variational Bayes
• Factorization of the posterior
and then marginalization is trivial.
• Every factor q depends on moments of other variables => must be solved iteratively.
Handling Blur - ICPR 2016 27
Miskin 01Fergus 06Whyte 10Levin 11Babacan 12Wipf 14
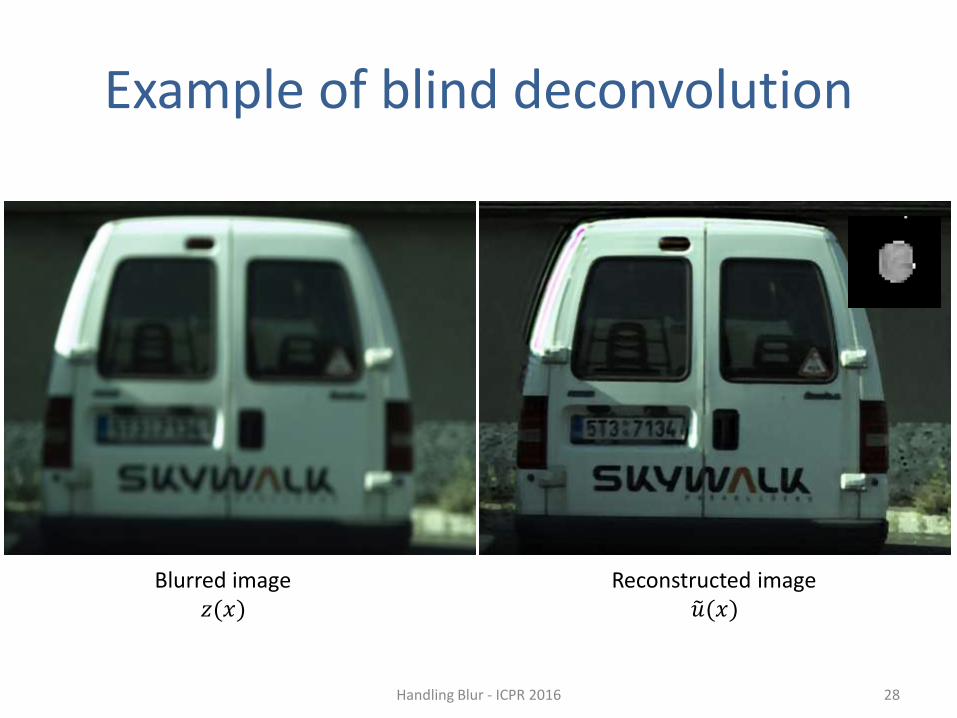
Example of blind deconvolution
Handling Blur - ICPR 2016 28
Blurred image𝑧(𝑥)
Reconstructed image𝑢(𝑥)
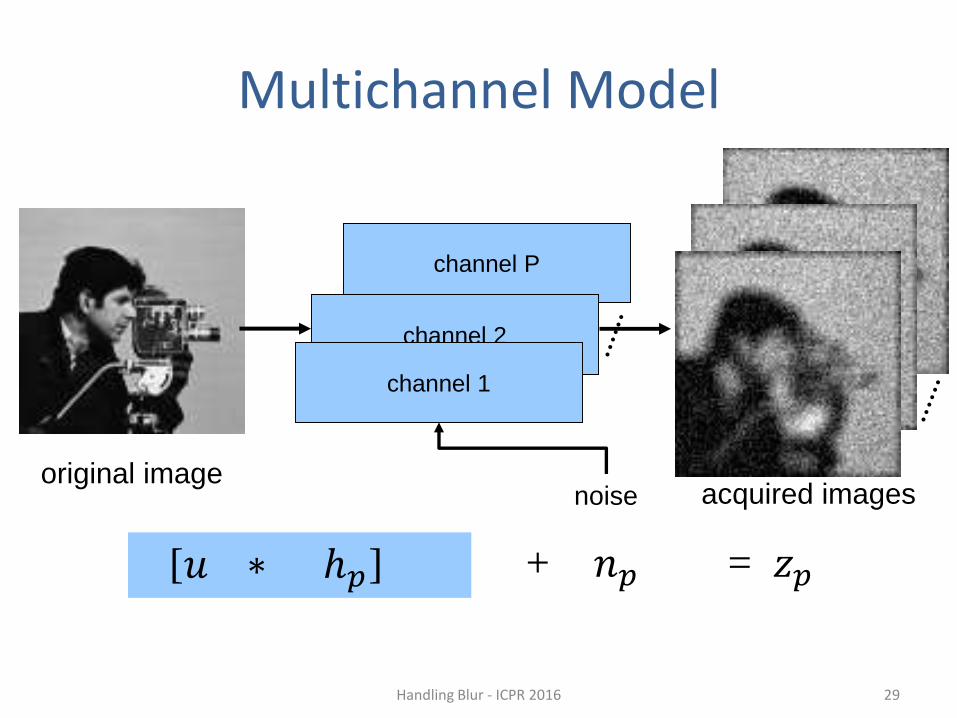
original image
𝑢
acquired images
= 𝑧𝑝
channel P
channel 2
channel 1
[𝑢 ∗ ℎ𝑝]
Multichannel Model
+ 𝑛𝑝
noise
Handling Blur - ICPR 2016 29
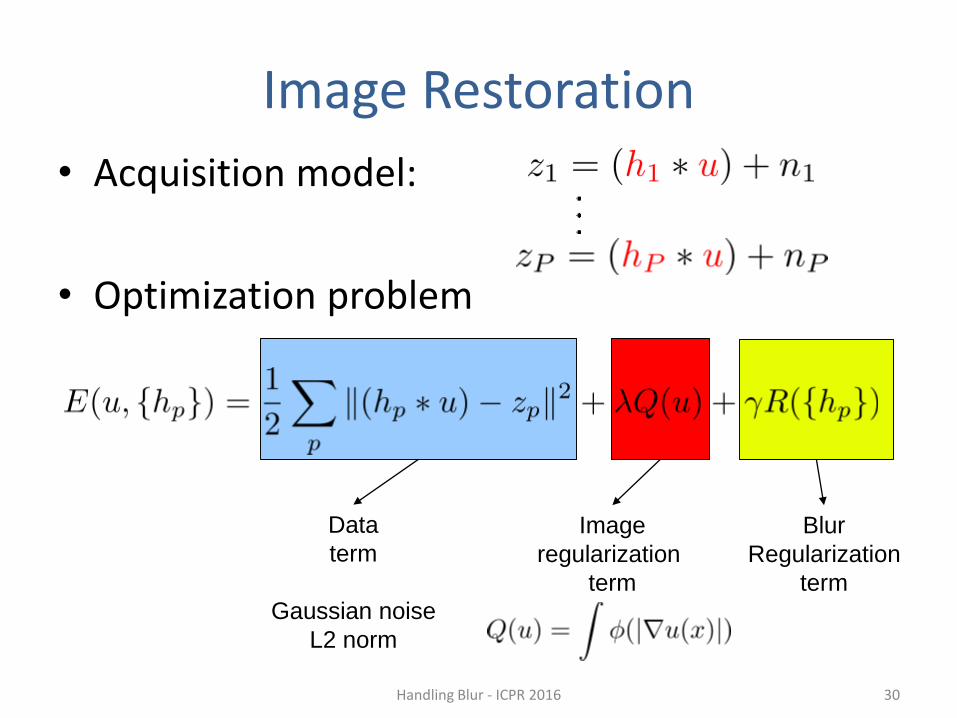
Image
regularization
term
Blur
Regularization
term
Data
term
Gaussian noise
L2 norm
Image Restoration
• Acquisition model:
• Optimization problem
Handling Blur - ICPR 2016 30
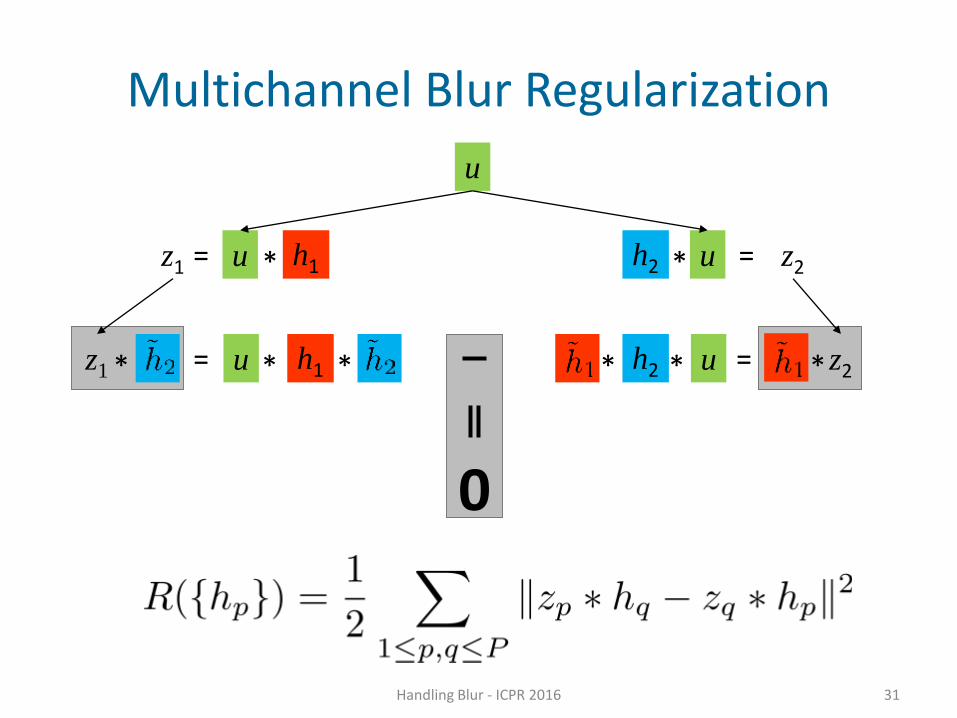
0
Multichannel Blur Regularization
u
h2*u uh1 *= =z1 z2
Handling Blur - ICPR 2016 31
z1 * *u h1= * z2*h2 u* =*
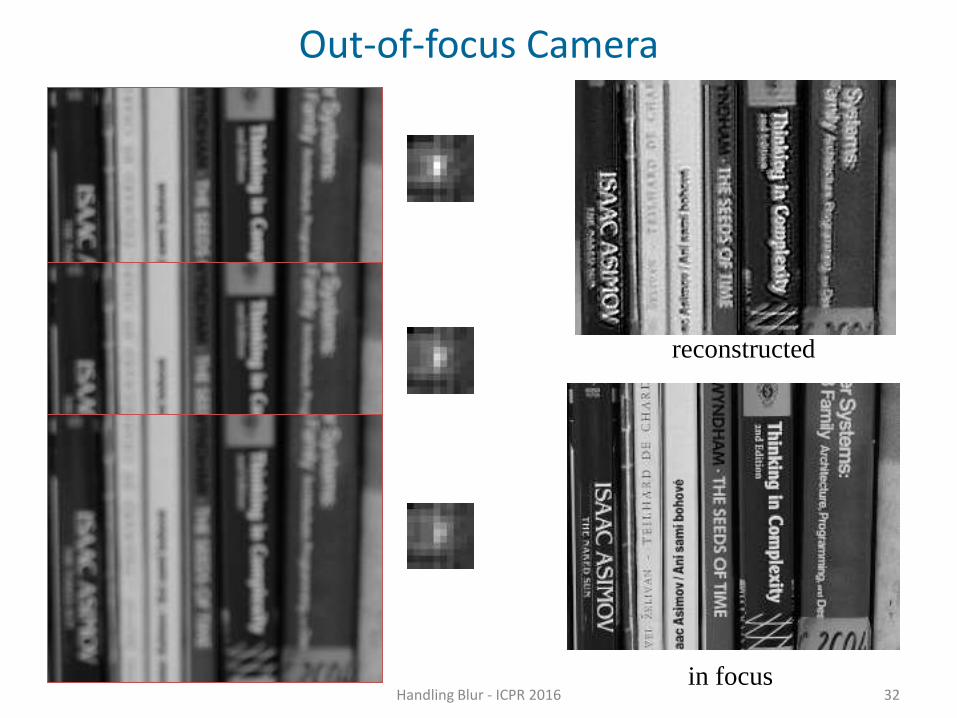
in focus
reconstructed
Out-of-focus Camera
Handling Blur - ICPR 2016 32
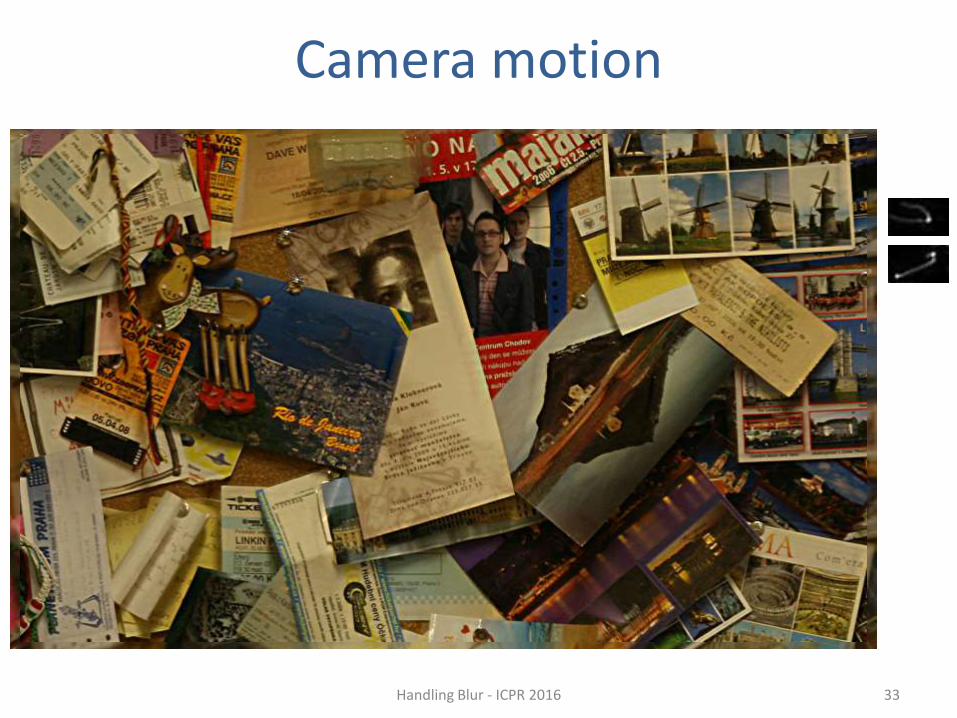
Camera motion
Handling Blur - ICPR 2016 33
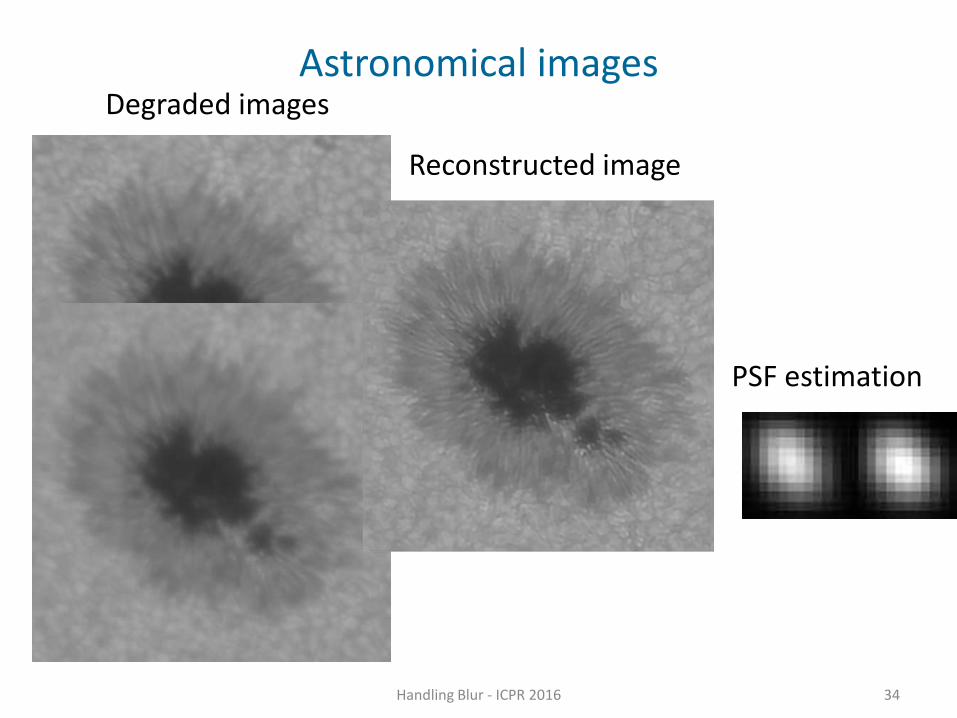
Degraded images
Reconstructed image
Astronomical images
PSF estimation
Handling Blur - ICPR 2016 34
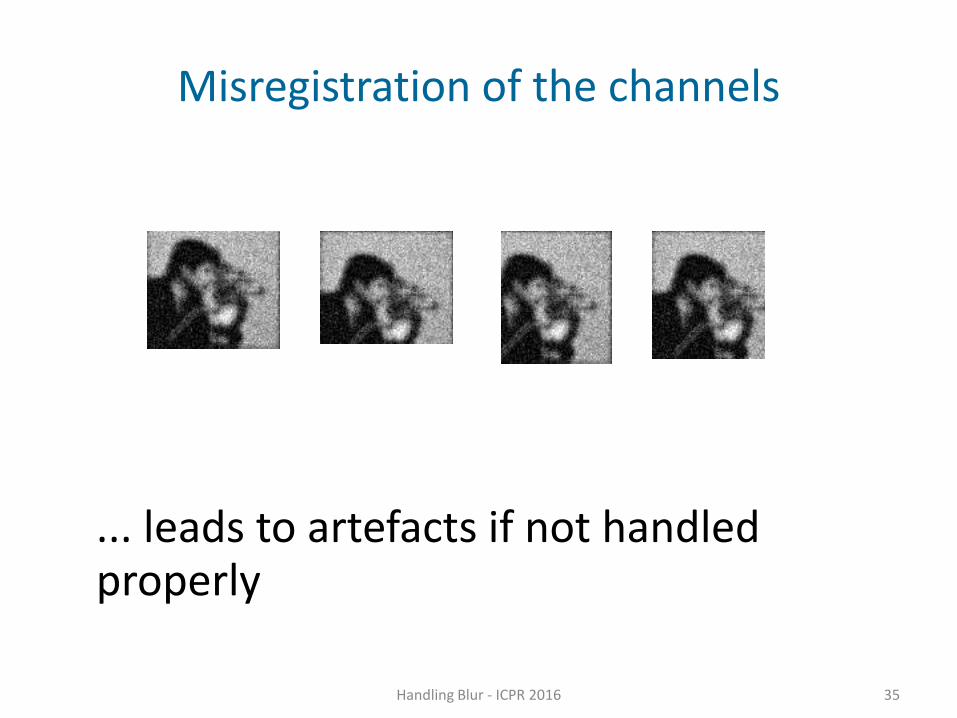
Misregistration of the channels
... leads to artefacts if not handledproperly
Handling Blur - ICPR 2016 35

Handling Blur - ICPR 2016 36
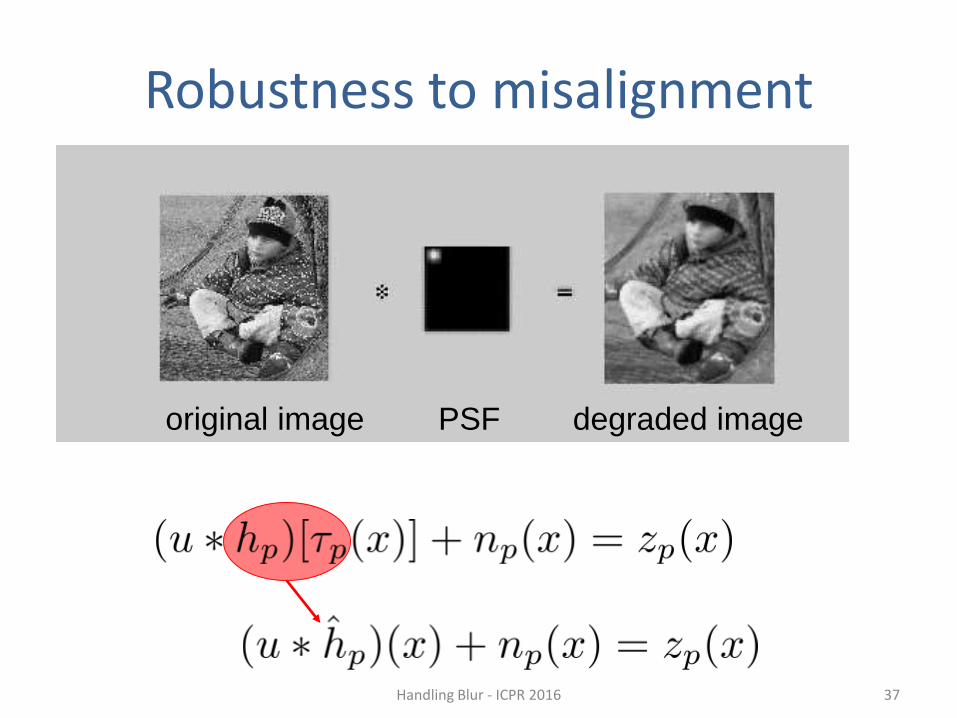
Robustness to misalignment
Handling Blur - ICPR 2016 37
original image PSF degraded image
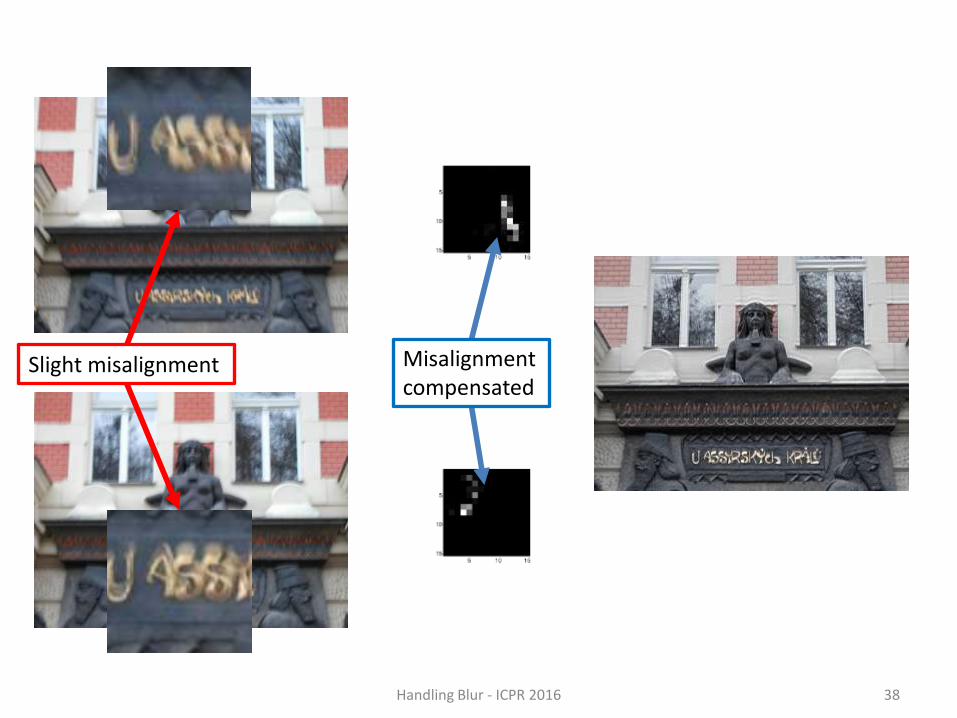
Handling Blur - ICPR 2016 38
Slight misalignment Misalignmentcompensated

No compensation
With compensation
Handling Blur - ICPR 2016 39
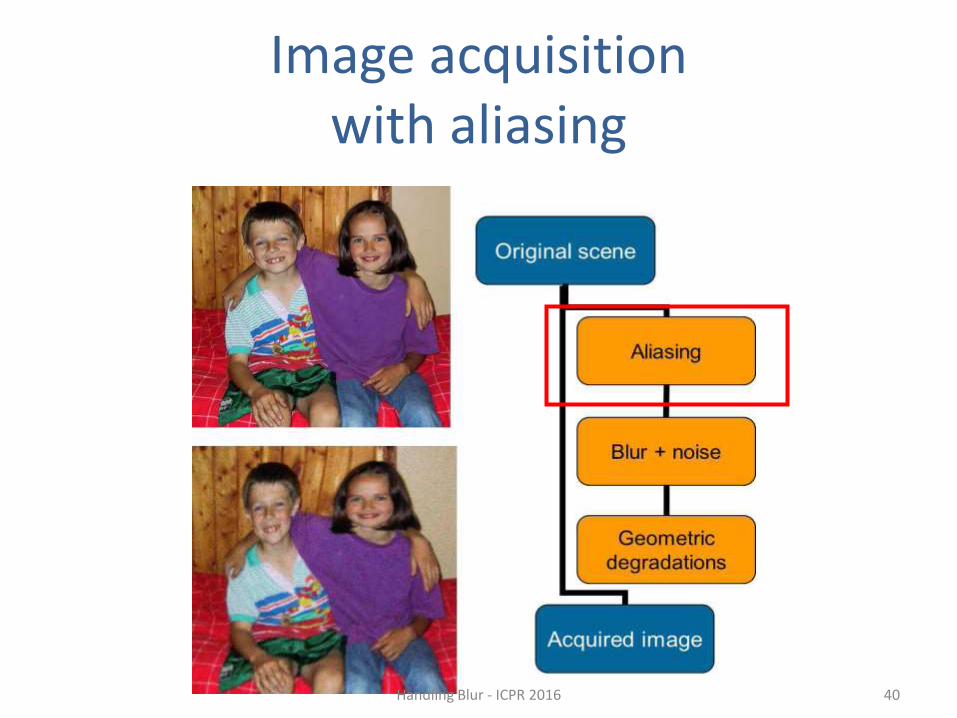
Image acquisition with aliasing
Handling Blur - ICPR 2016 40

Aliasing
• The loss of the high frequencies (details)
due to an insufficient resolution of the camera
Handling Blur - ICPR 2016 41
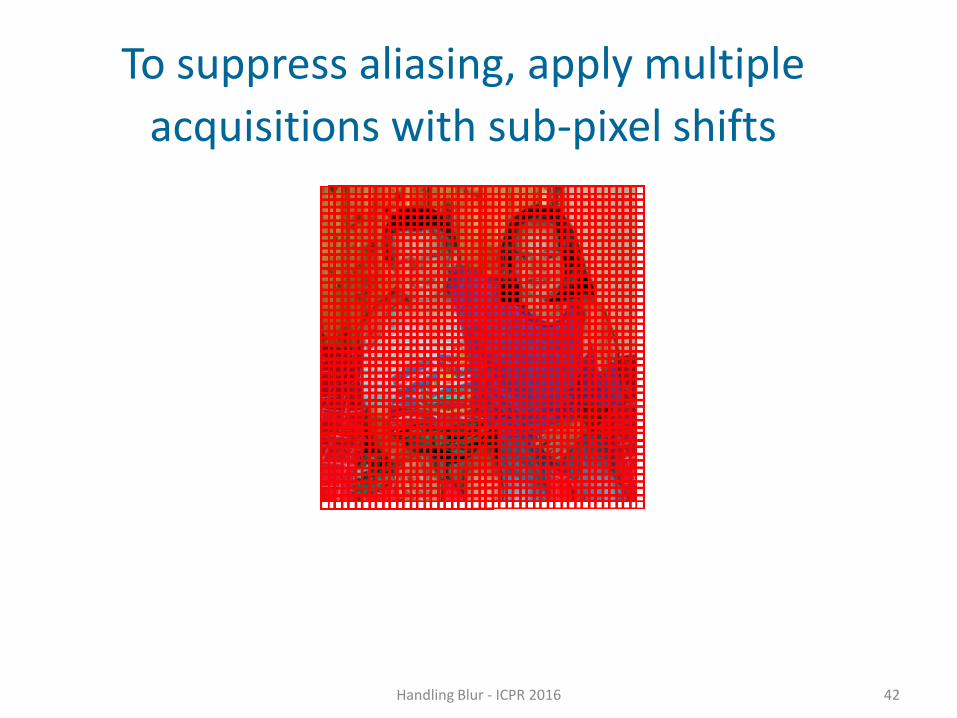
To suppress aliasing, apply multiple
acquisitions with sub-pixel shifts
Handling Blur - ICPR 2016 42
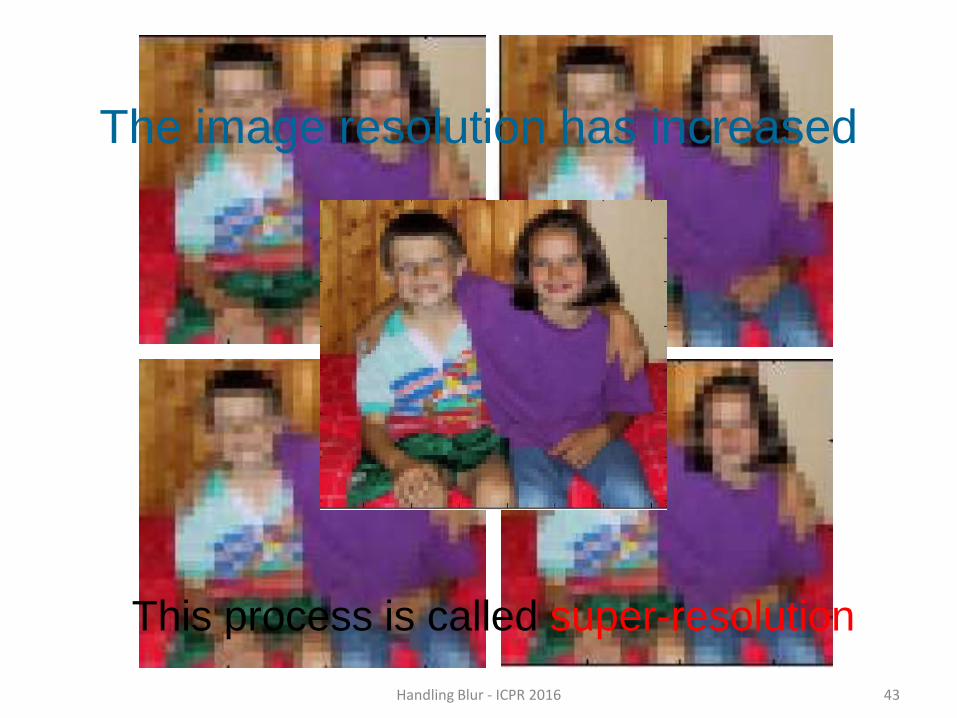
The image resolution has increased
This process is called super-resolution
Handling Blur - ICPR 2016 43
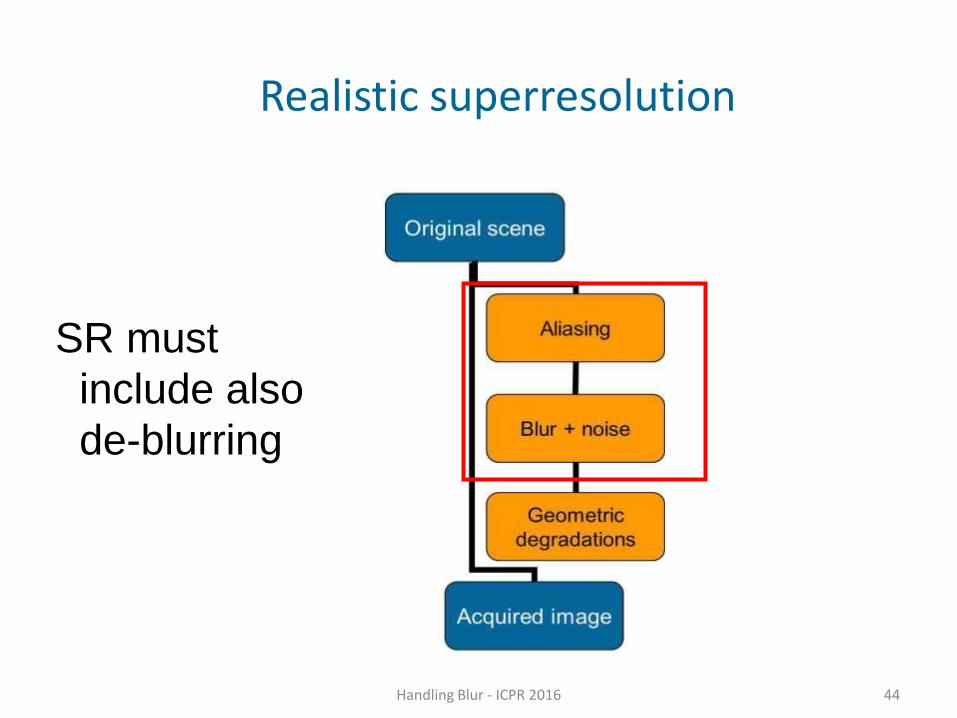
Realistic superresolution
SR must
include also
de-blurring
Handling Blur - ICPR 2016 44
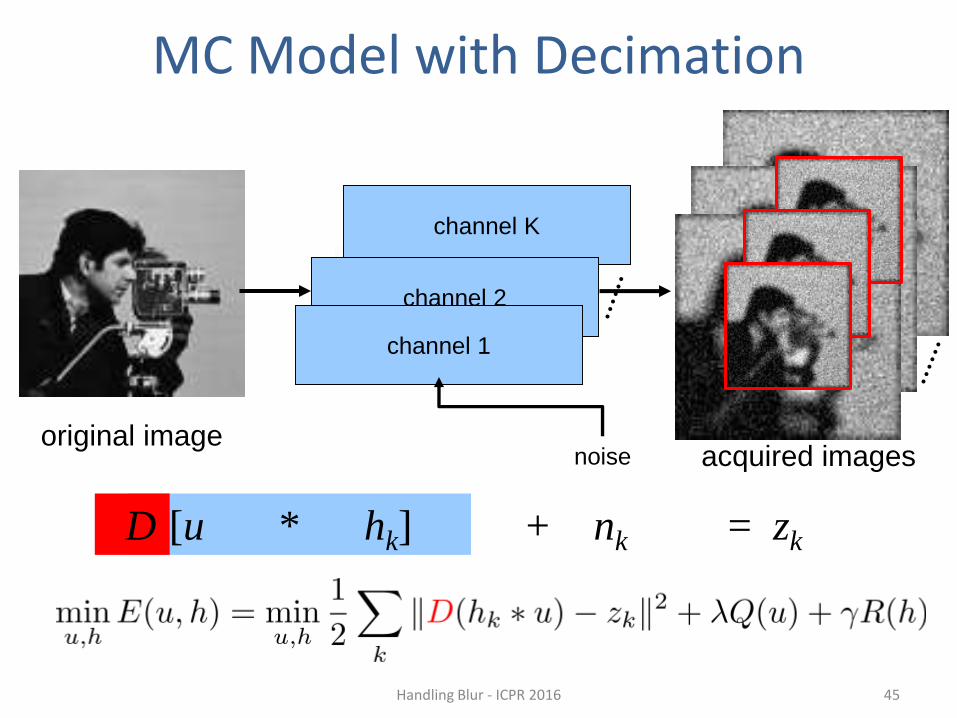
original image
u
acquired images
= zk
channel K
channel 2
channel 1
[u * hk]
MC Model with Decimation
+ nk
noise
D
Handling Blur - ICPR 2016 45
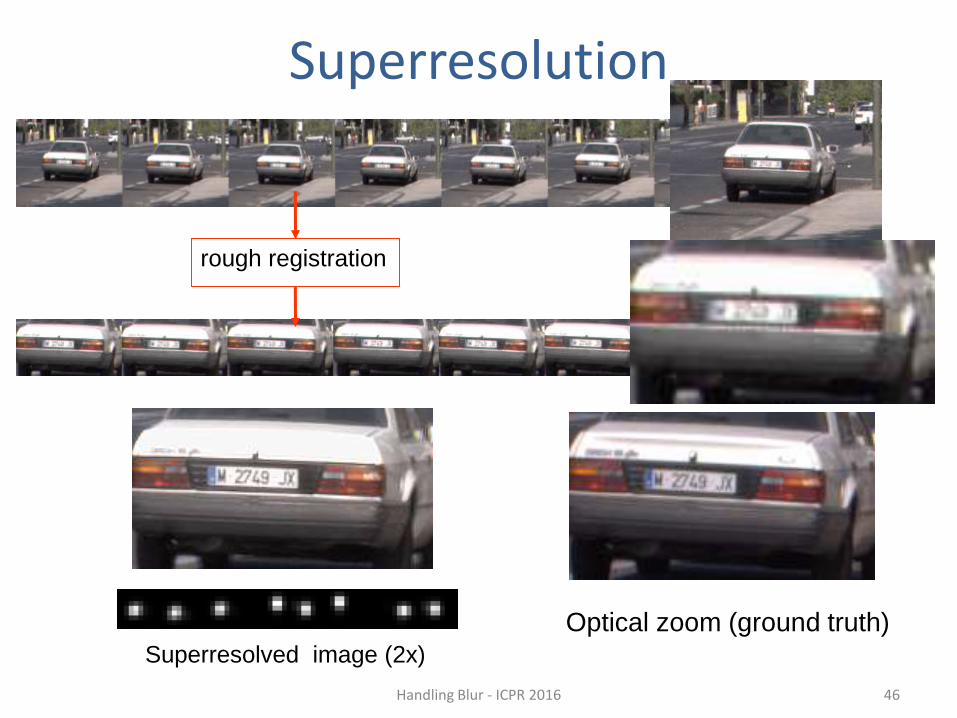
Superresolution
Handling Blur - ICPR 2016 46
Superresolved image (2x)
Optical zoom (ground truth)
rough registration
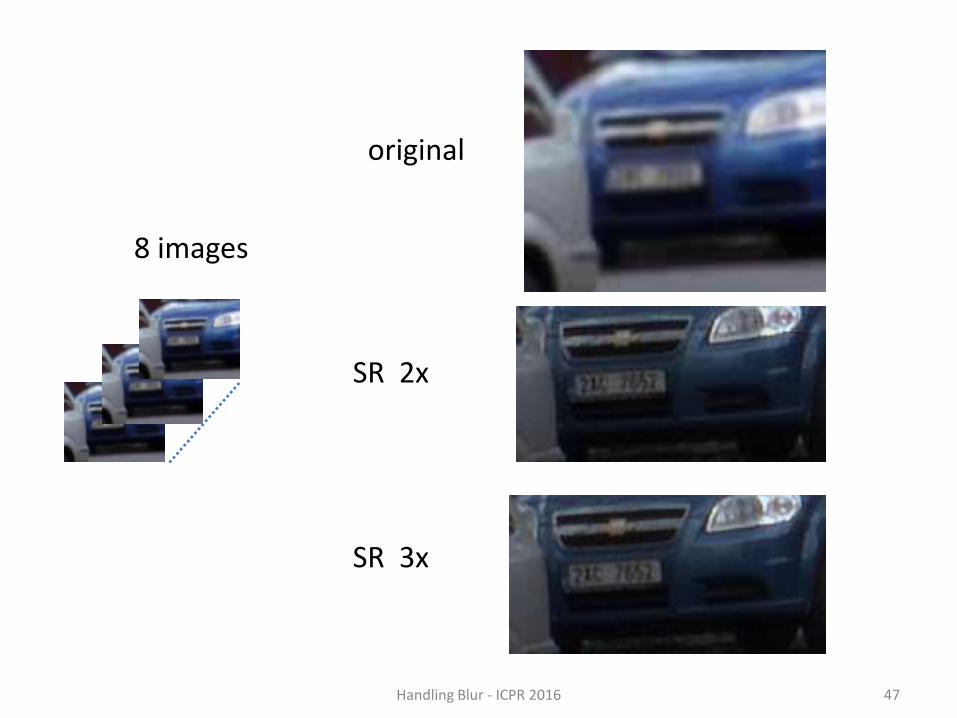
8 images
SR 3x
SR 2x
original
Handling Blur - ICPR 2016 47
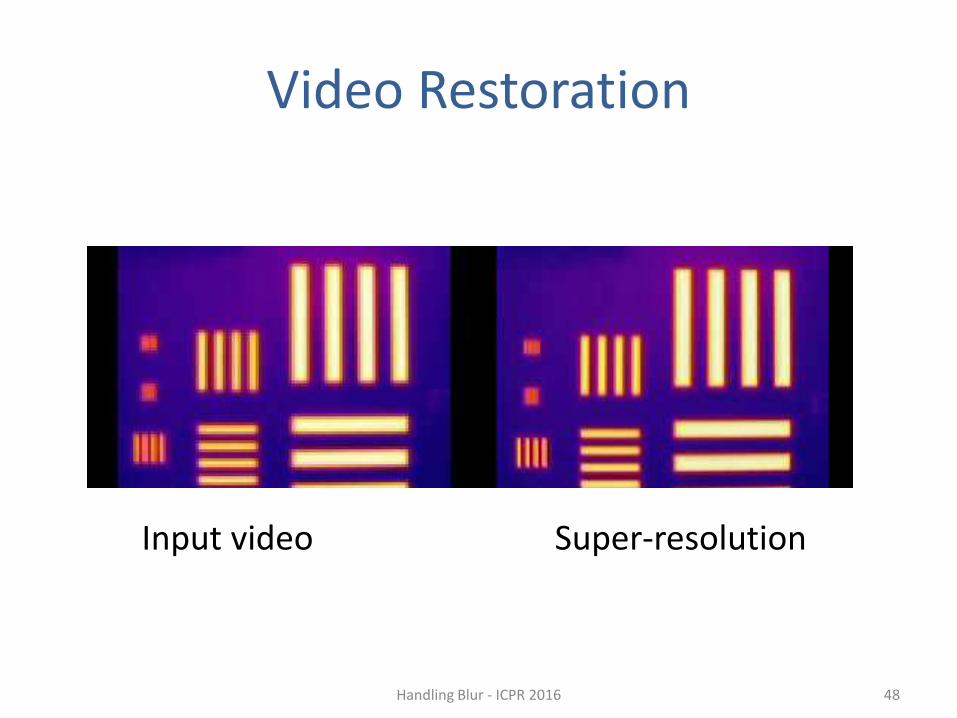
Input video Super-resolution
Video Restoration
Handling Blur - ICPR 2016 48
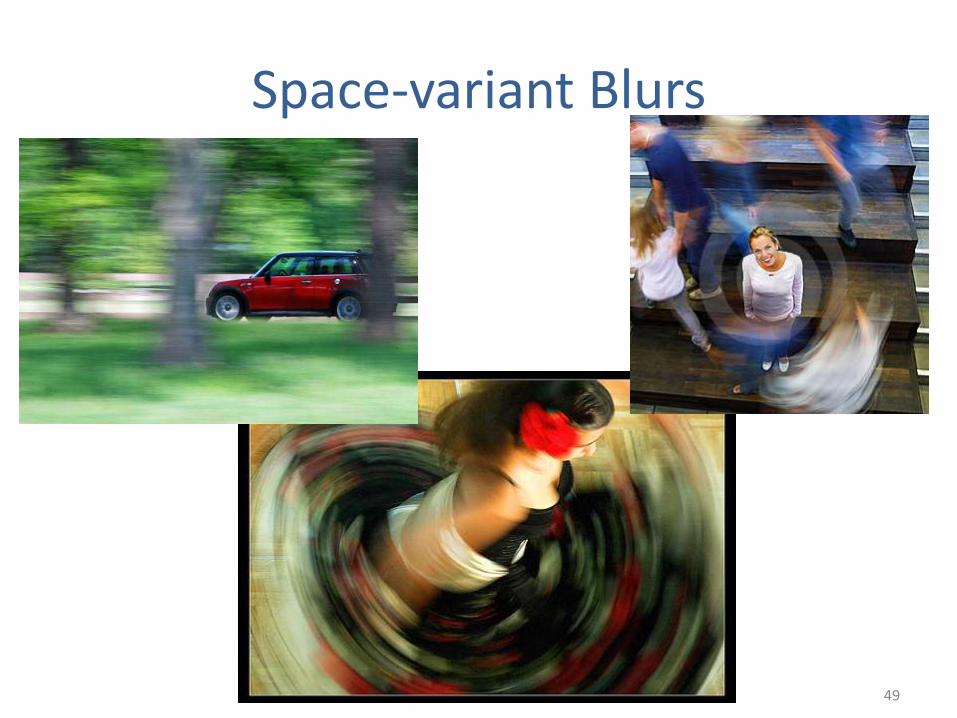
Space-variant Blurs
Handling Blur - ICPR 2016 49
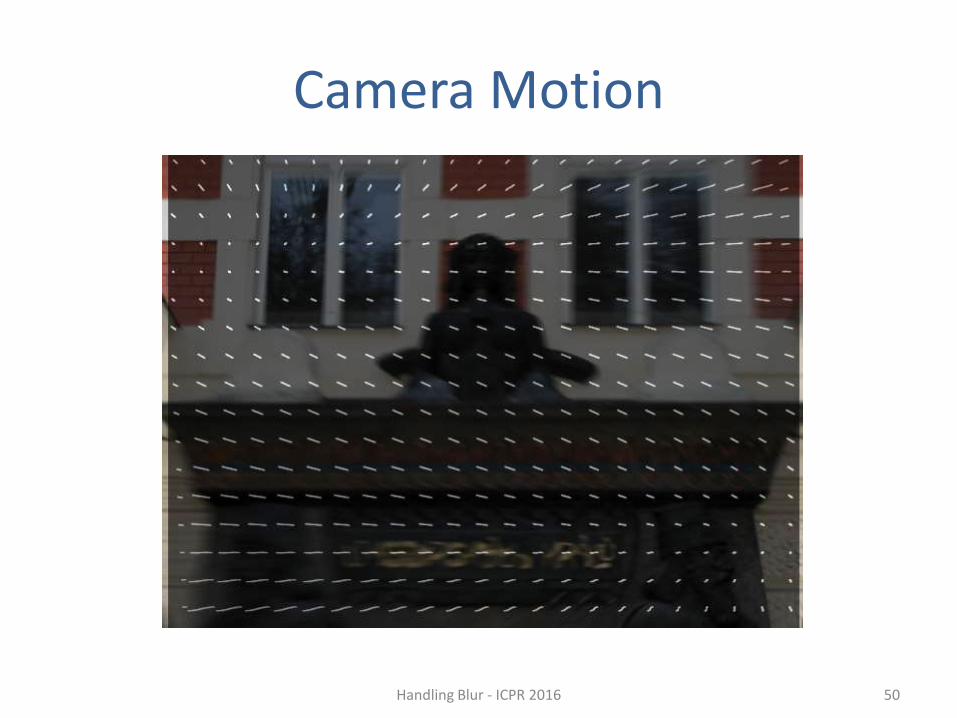
Camera Motion
50Handling Blur - ICPR 2016
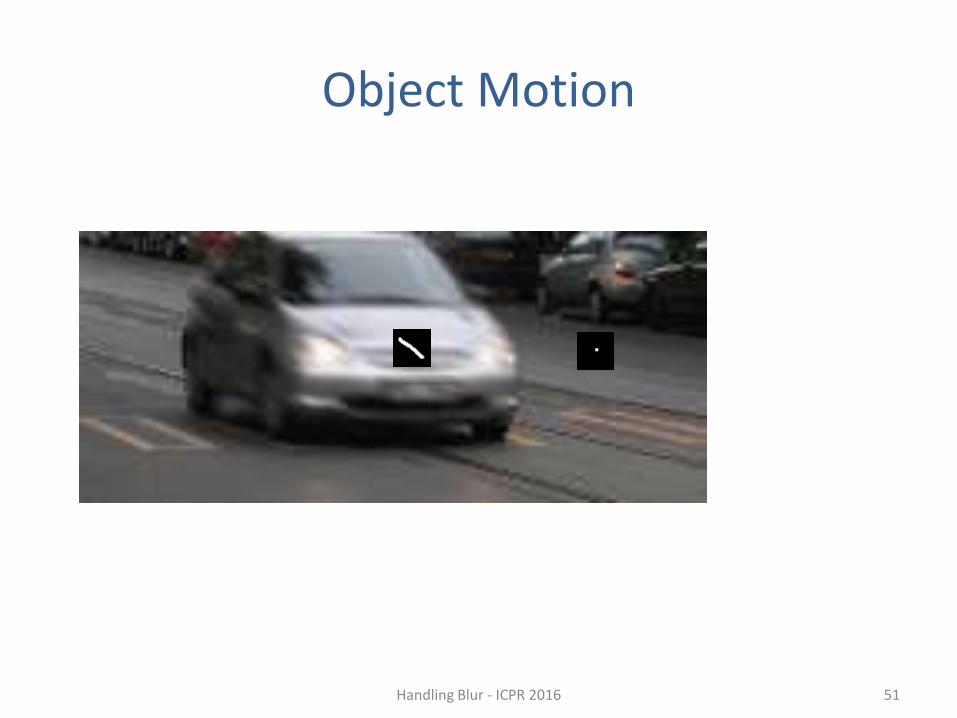
Object Motion
51Handling Blur - ICPR 2016
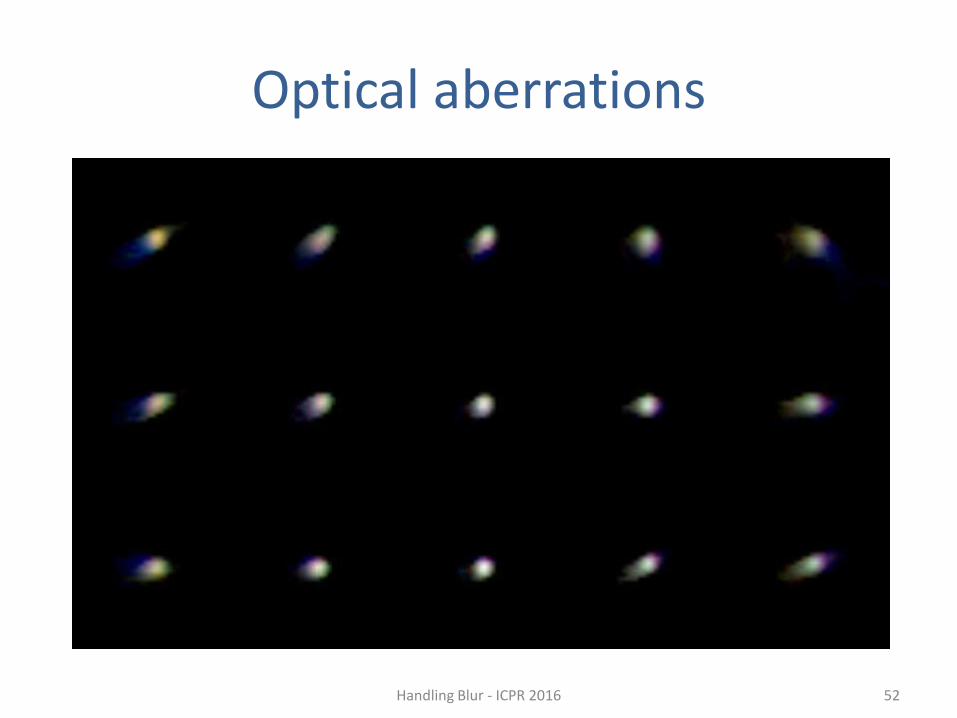
Optical aberrations
Handling Blur - ICPR 2016 52
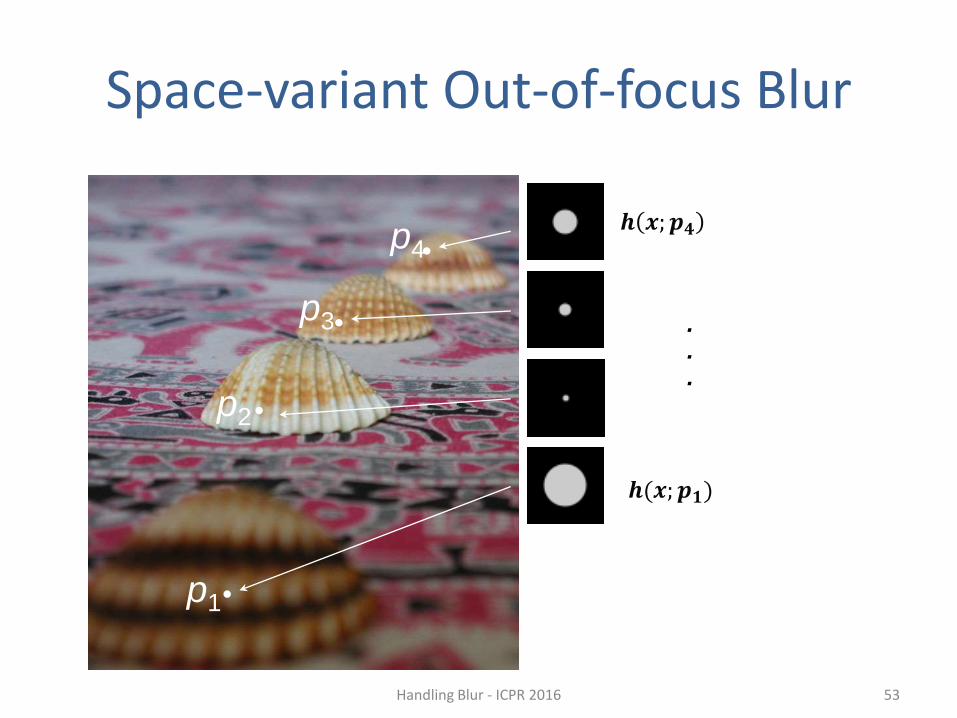
Space-variant Out-of-focus Blur
p1
p2
p3
p4𝒉 𝒙; 𝒑𝟒
𝒉(𝒙; 𝒑𝟏)
.
.
.
53Handling Blur - ICPR 2016
Approximation of SV Blur
• Patch-wise convolution– General SV PSF– Locally convolution may not hold
• Parametric model (Blur Basis)– More accurate– Model may not hold
• Local object motion– Segmentation– Line blur
• Conversion to space-invariant– HW design
Handling Blur - ICPR 2016 54
Joshi CVPR08, Sorel ICIP09,Ji CVPR12,Sun CVPR15
Levin NIPS06, Shan ICCV07, Dai CVPR08, Chakrabarti CVPR10, Kim CVPR14
Whyte CVPR10, Gupta ECCV10, Hirsch ICCV11, Zhang NIPS13
Levin SIGGRAPH08
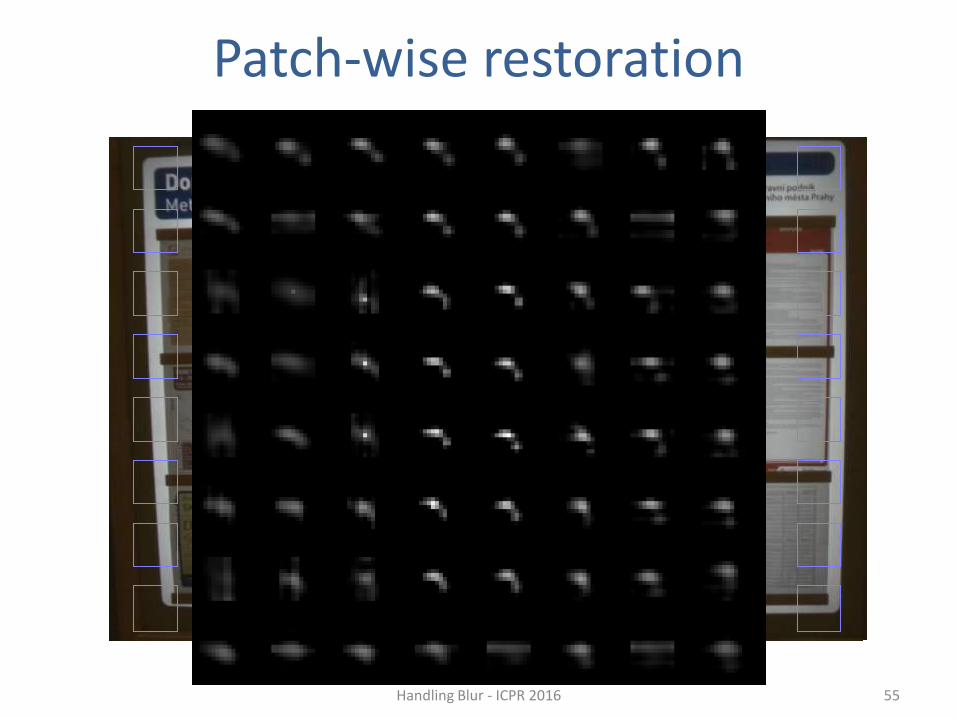
Patch-wise restoration
Handling Blur - ICPR 2016 55
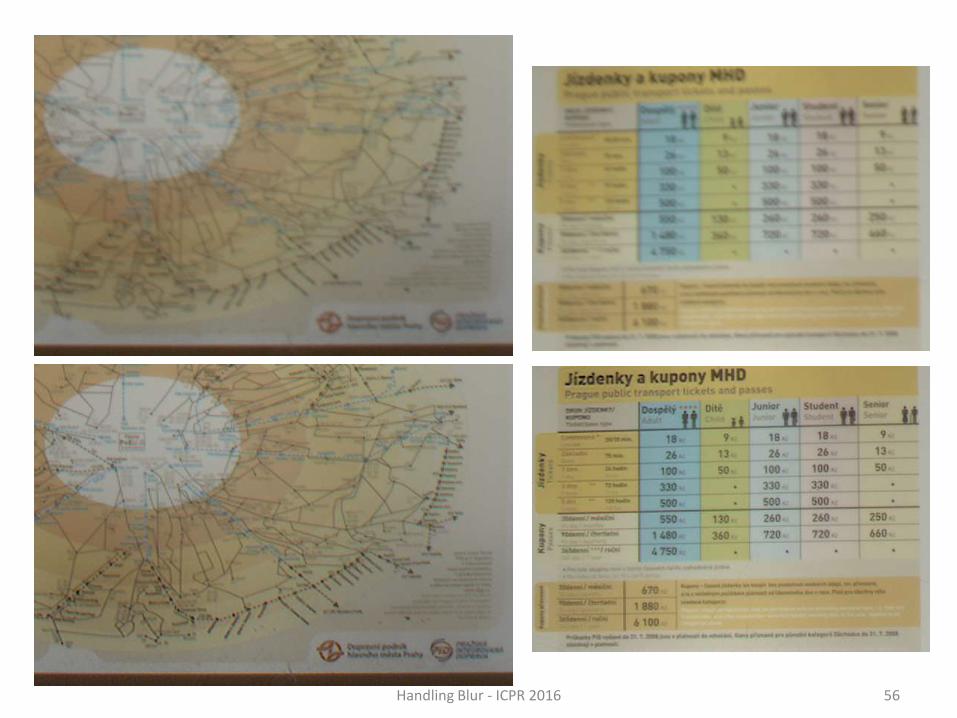
Handling Blur - ICPR 2016 56
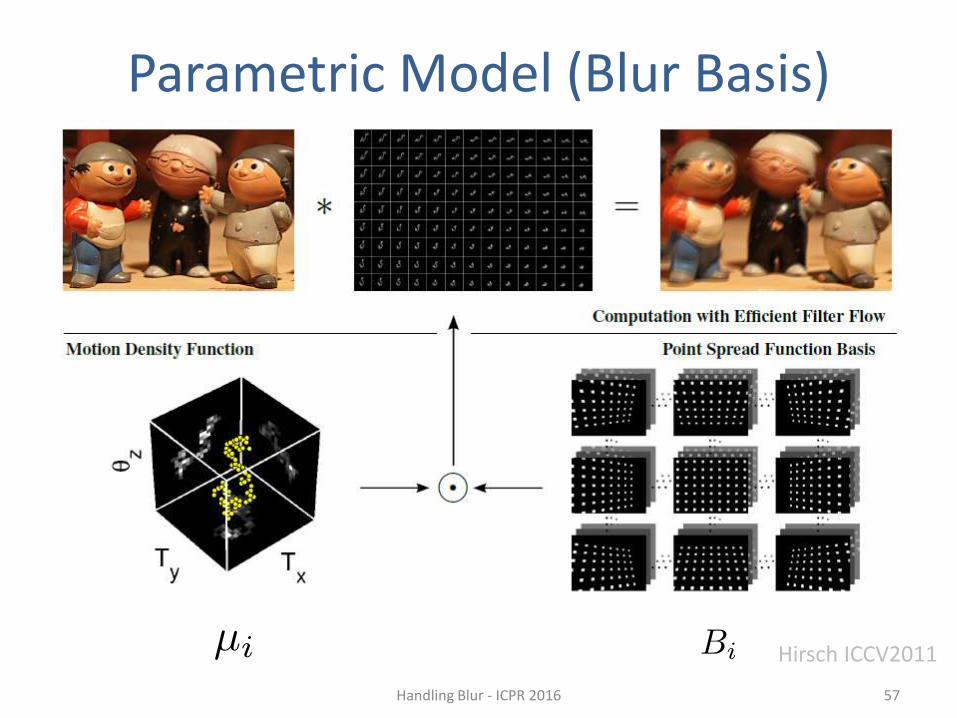
Parametric Model (Blur Basis)
Handling Blur - ICPR 2016 57
Hirsch ICCV2011
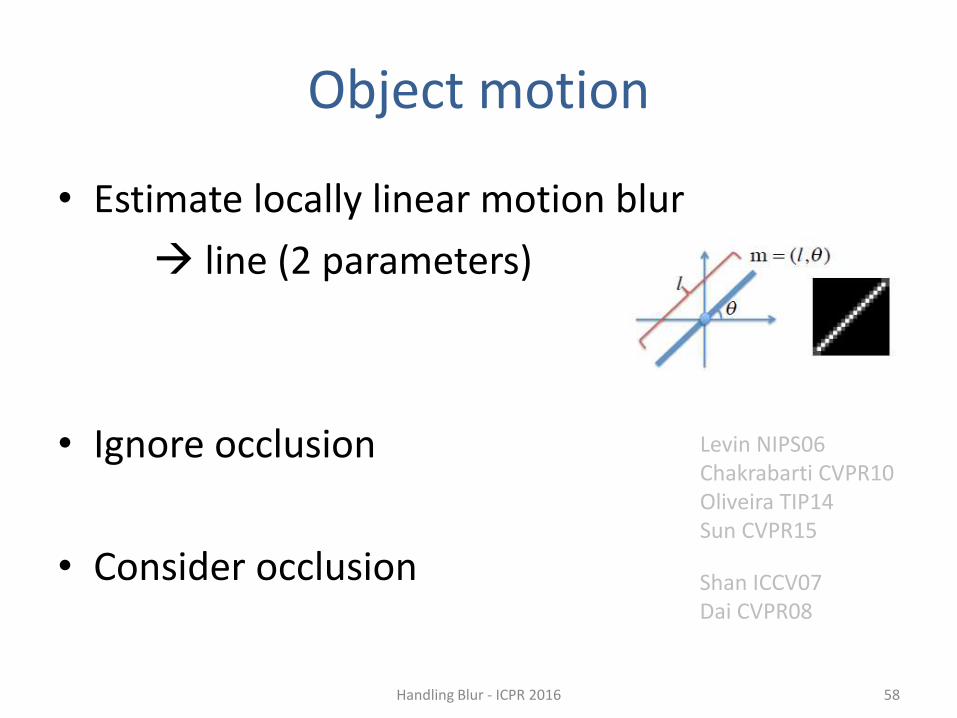
Object motion
• Estimate locally linear motion blur
line (2 parameters)
• Ignore occlusion
• Consider occlusion
Handling Blur - ICPR 2016 58
Shan ICCV07Dai CVPR08
Levin NIPS06Chakrabarti CVPR10Oliveira TIP14Sun CVPR15
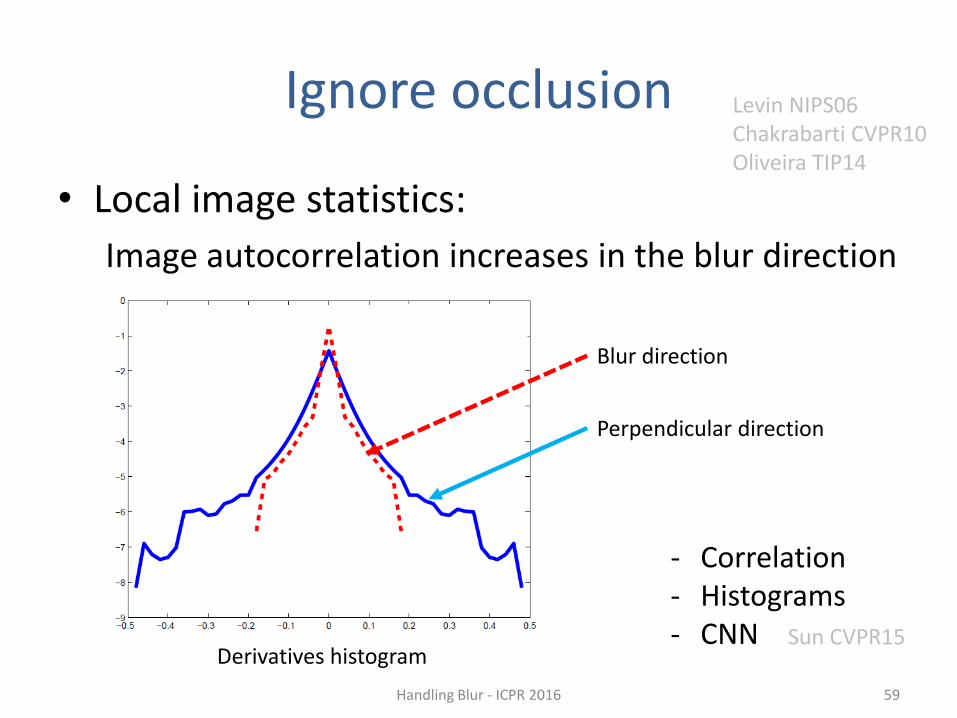
Ignore occlusion
• Local image statistics:
Image autocorrelation increases in the blur direction
Handling Blur - ICPR 2016 59
Blur direction
Perpendicular direction
Derivatives histogram
Levin NIPS06Chakrabarti CVPR10Oliveira TIP14
Sun CVPR15
- Correlation- Histograms- CNN
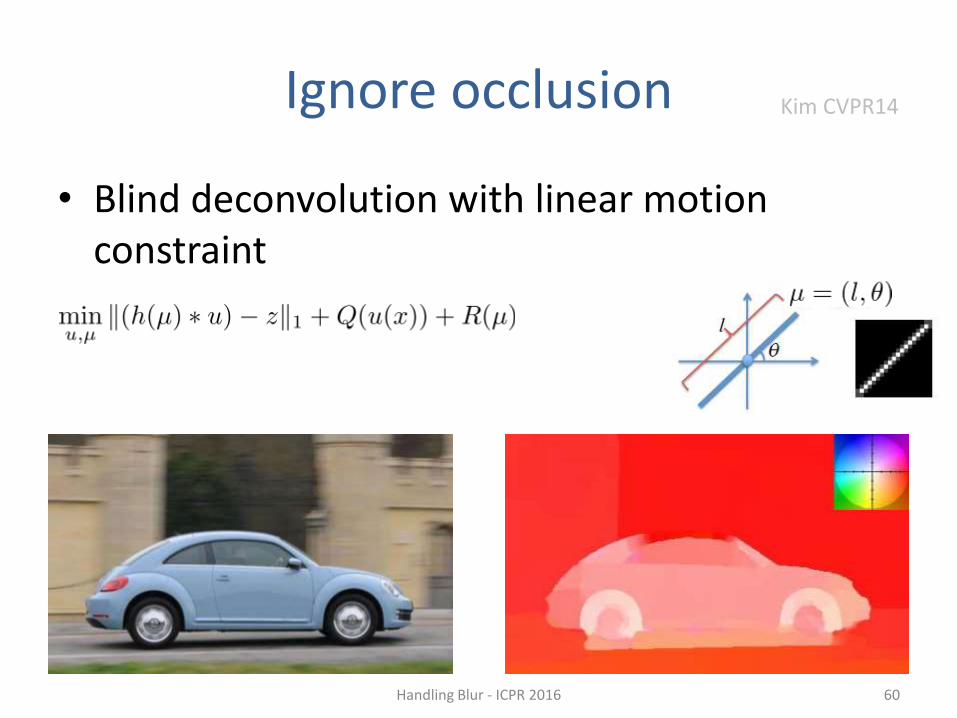
Ignore occlusion
• Blind deconvolution with linear motion constraint
Handling Blur - ICPR 2016 60
Kim CVPR14
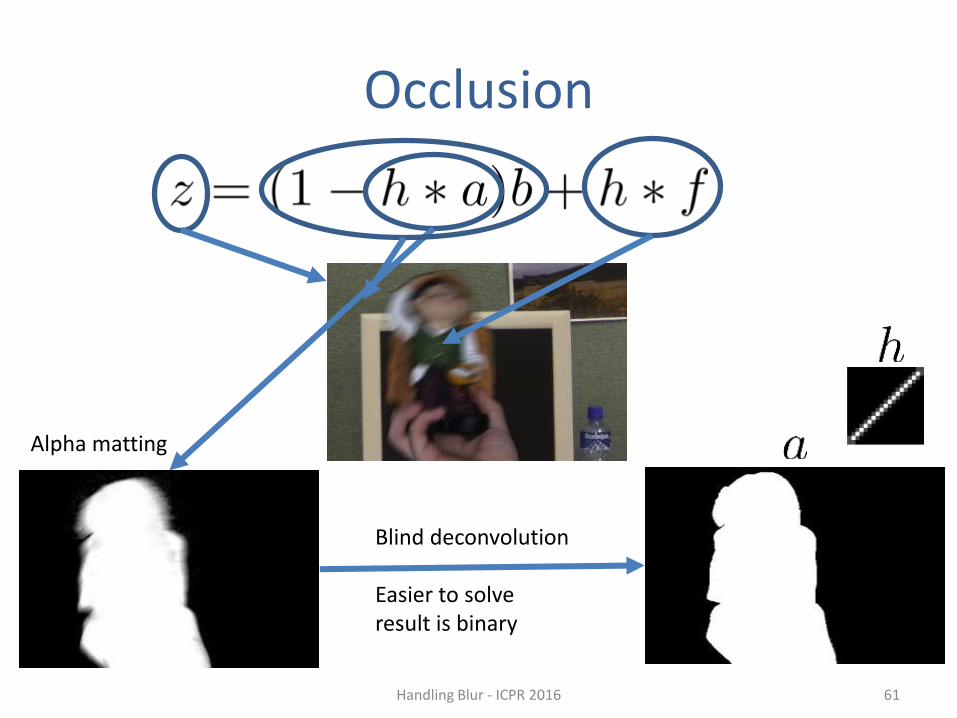
Occlusion
Handling Blur - ICPR 2016 61
Alpha matting
Blind deconvolution
Easier to solveresult is binary
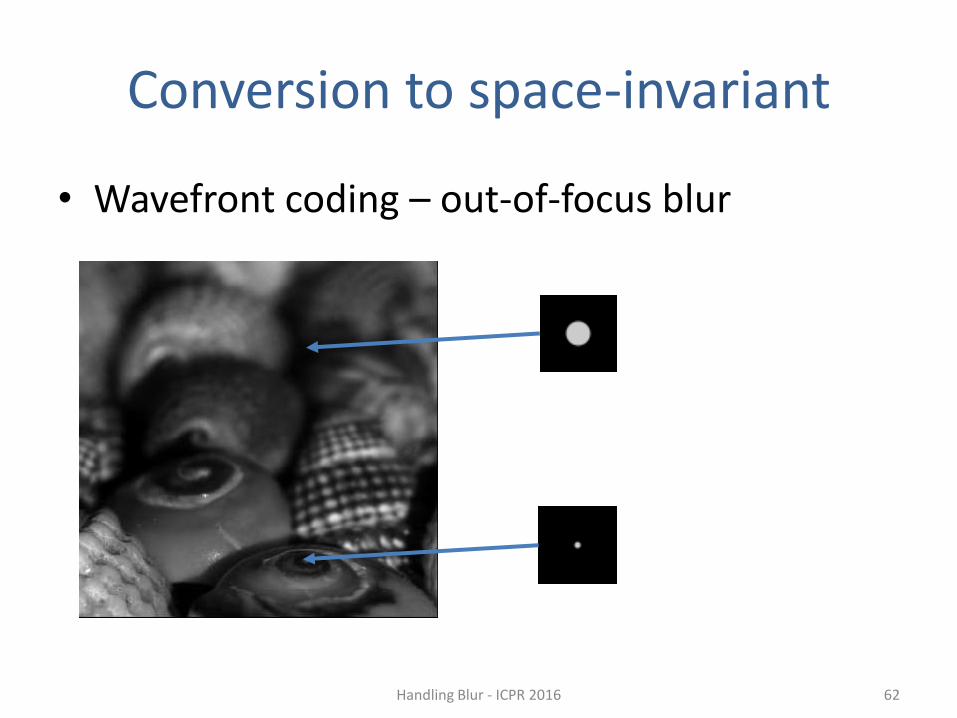
Conversion to space-invariant
• Wavefront coding – out-of-focus blur
Handling Blur - ICPR 2016 62
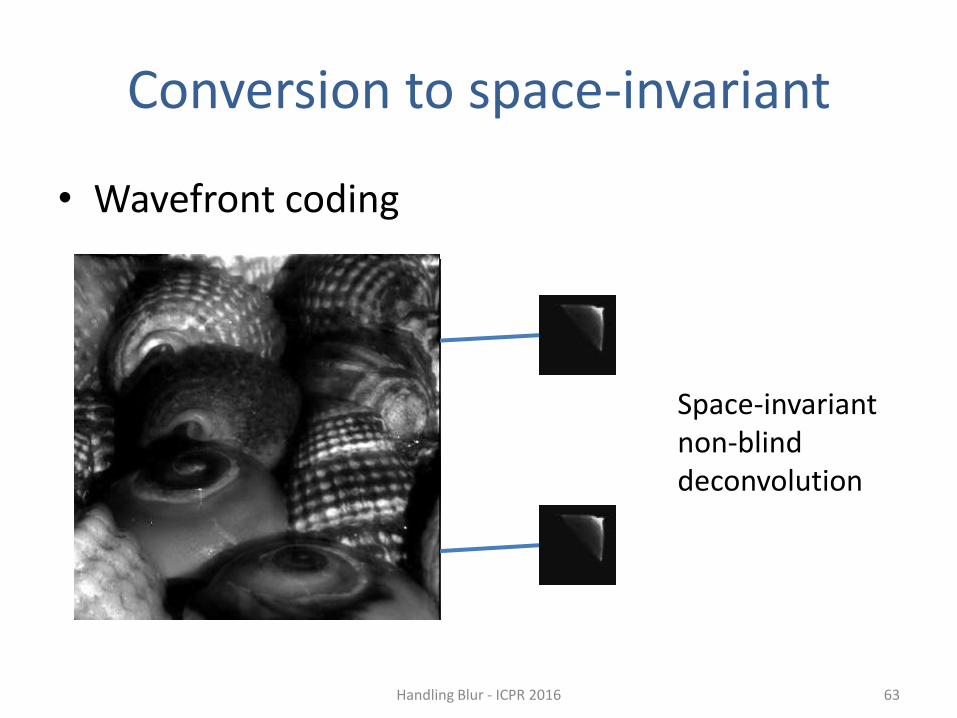
Conversion to space-invariant
• Wavefront coding
Handling Blur - ICPR 2016 63
Space-invariantnon-blind deconvolution
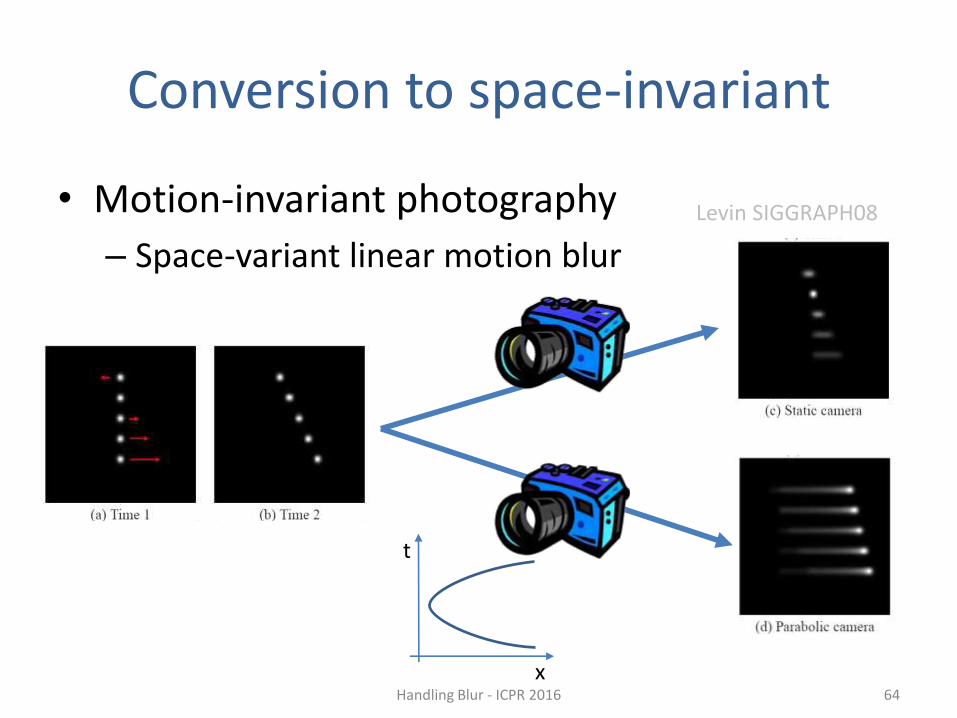
Conversion to space-invariant
• Motion-invariant photography
– Space-variant linear motion blur
Handling Blur - ICPR 2016 64
Levin SIGGRAPH08
x
t
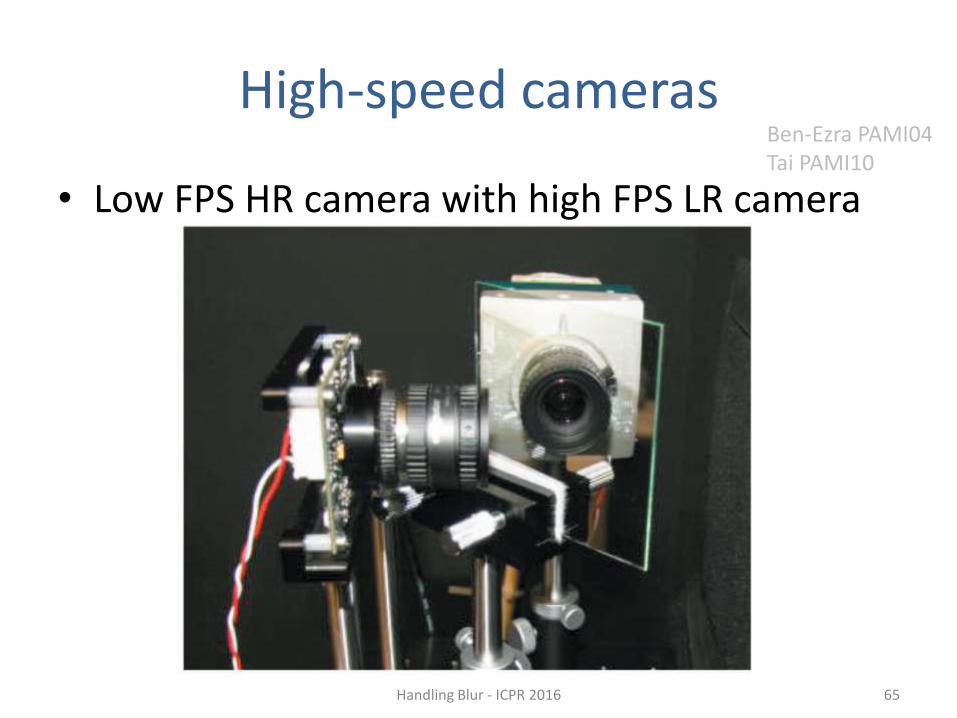
High-speed cameras
• Low FPS HR camera with high FPS LR camera
Handling Blur - ICPR 2016 65
Ben-Ezra PAMI04Tai PAMI10
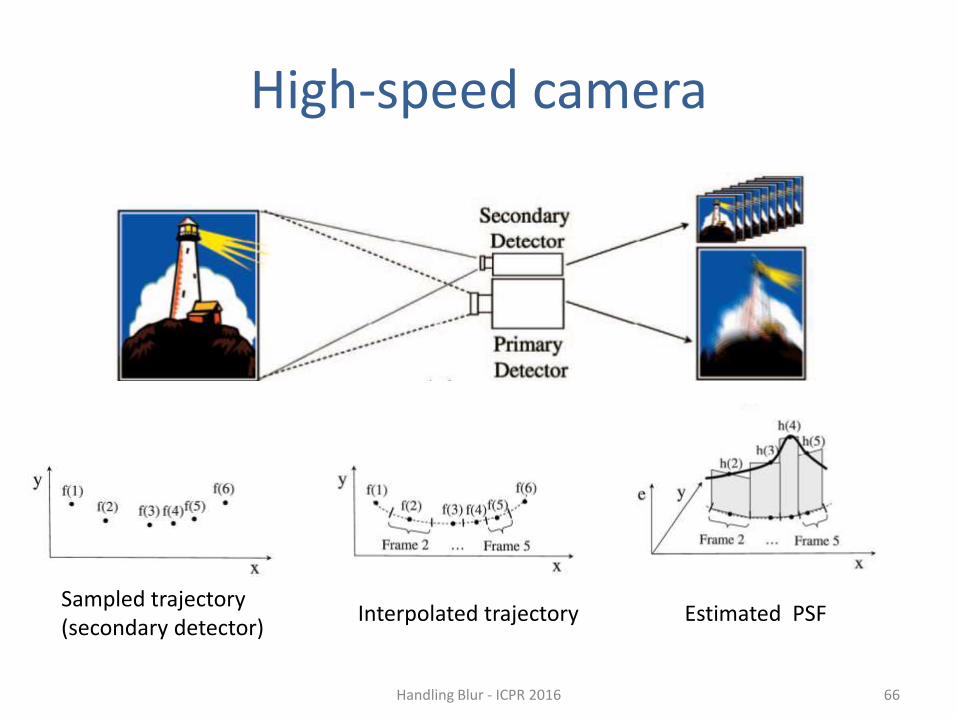
High-speed camera
Handling Blur - ICPR 2016 66
Sampled trajectory (secondary detector)
Estimated PSFInterpolated trajectory
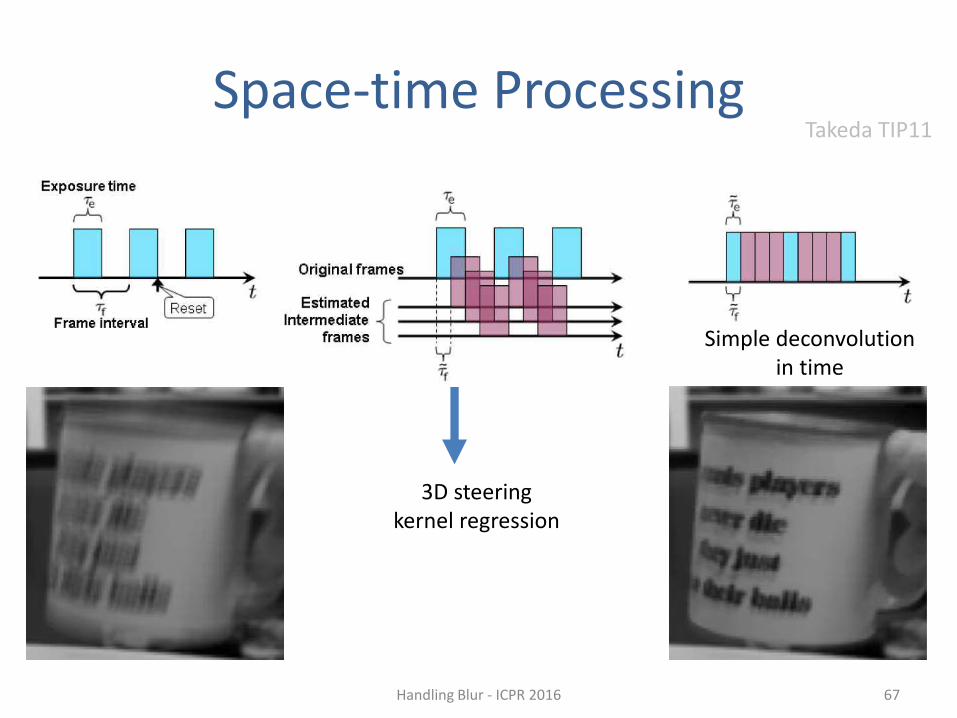
Space-time Processing
Handling Blur - ICPR 2016 67
Takeda TIP11
3D steering kernel regression
Simple deconvolution in time
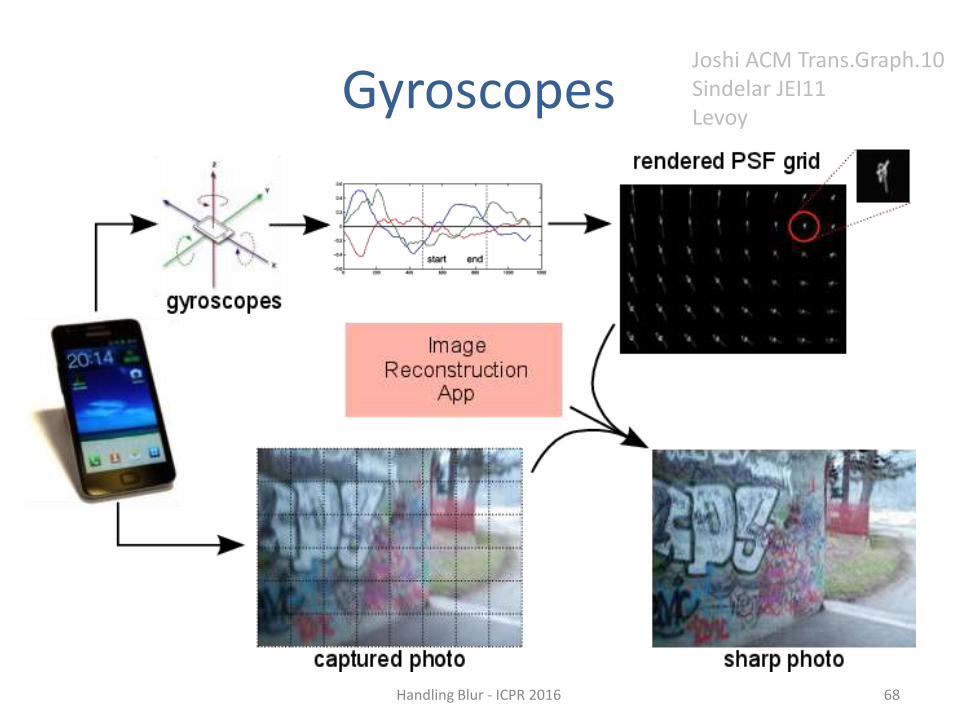
Gyroscopes
Handling Blur - ICPR 2016 68
Joshi ACM Trans.Graph.10Sindelar JEI11Levoy
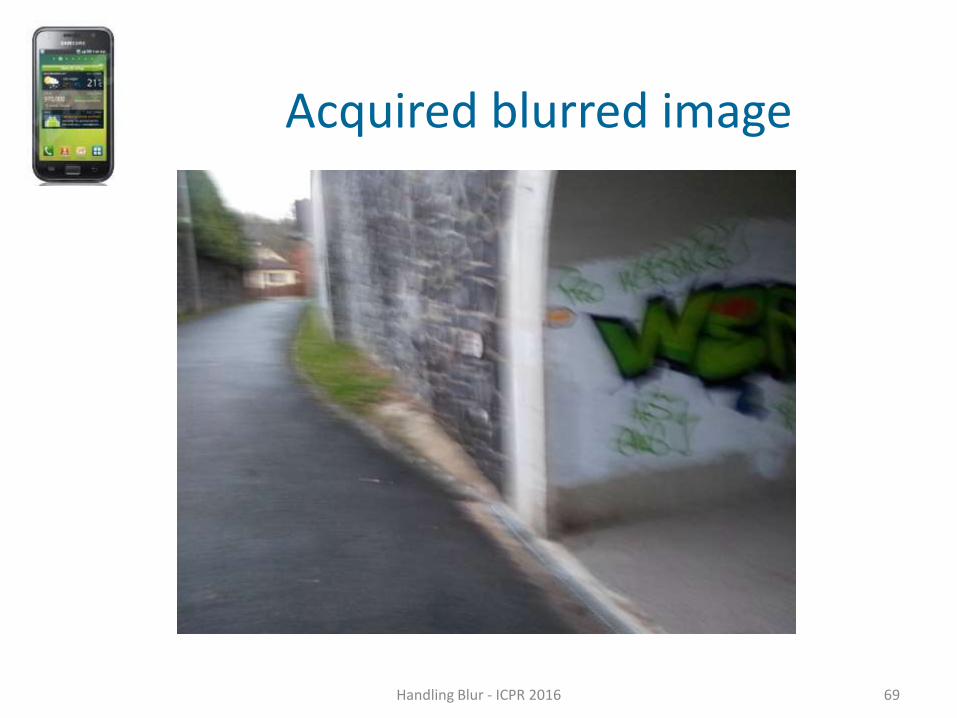
Acquired blurred image
Handling Blur - ICPR 2016 69
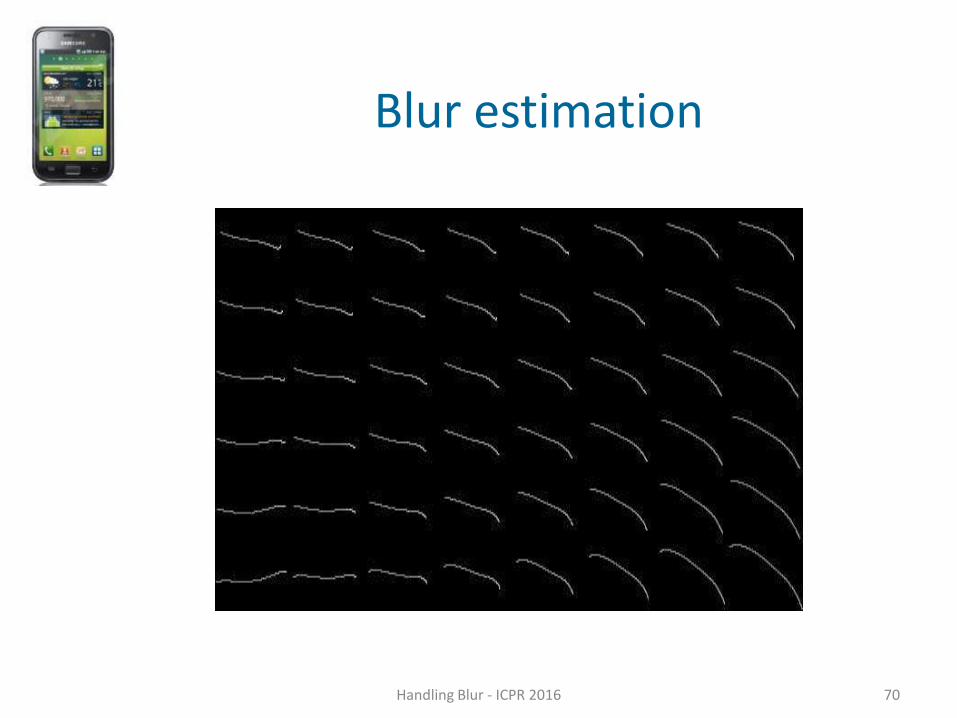
Blur estimation
Handling Blur - ICPR 2016 70

Patch-wise Deconvolution
Handling Blur - ICPR 2016 71
Final Remarks
• MC is far more stable than SC BD.
• How to make SC more robust?
• Can Deep Learning make classical BD methods obsolete?
Handling Blur - ICPR 2016 72
Thank You…
Handling Blur - ICPR 2016 73





![Discriminative Blur Detection Featuresleojia/projects/dblurdetect/... · cal blur features for blur confidenceand type classification. Chakrabarti et al. [3] analyzed directional](https://img.dokumen.tips/doc/110x75/606a380b892efc4f822ed5db/discriminative-blur-detection-leojiaprojectsdblurdetect-cal-blur-features.jpg)























