Embed Size (px)
Citation preview

POZICIJA –LEGA Potenciometer, diferencialni induktivni dajalnik
Seminarska naloga pri predmetu merilni pretvorniki
Ljubljana 2011
Izdelala: Andrej Pižmoht Andrej Lazovič

1. Uvod Merjenje položaja predmetov je bistvenega pomena za mnogo aplikacij. Za nadziranje in vrednotenje delovanja nekega procesa je zelo pomembna natančna informacija o poziciji oz. legi. S tem mislimo na odmik predmeta iz enega položaja v drugega za določeno razdaljo ali kot. V sodobnih in avtomatiziranih linijah nam te informacije podajajo senzorji in dajalniki. Delujejo na različne principe, a v grobem vsi fizikalno spremembo neke veličine zaznajo kot spremembo električne veličine. (Sprememba upornosti, kapacitivnosti, induktivnosti…) Potenciometer je uporabljen v aplikacijah, ki spremembo položaja, odmik, merijo s pomočjo spremembe upornosti, diferencialni induktivni dajalnik pa v takih, ki odmik merijo s pomočjo spremembe induktivnosti.

2. Potenciometer Uporovnim merilnikom z drugo besedo rečemo tudi potenciometri. Potenciometri so naprave, v katerih je kontaktni element (drsnik), ki drsi po uporovni površini. Uporovna površina je lahko na jedro navita žica ali plast prevodnega materiala (običajno prevodna plastika). Uporabo potenciometra je ena od najpreprostejših metod za merjenje kotnega ali linearnega pomika. Uporabljamo jih tam kjer nimamo opravka z velikimi močmi.
Slika 1: Simbol potenciometra EU in US standardu

3. Fizikalna osnova Potenciometer je upor s tremi priključki. Med dvema priključkoma (AB) je upornost stalna (RAB). Lega tretjega priključka je nastavljiva z gumbom ali drsnikom med priključkoma A in B. Upornosti RAC in RCB se spreminjata, njuna vsota pa je konstantna in enaka RAB = RAC + RCB
Slika 3.1: Potenciometer kot delilnik napetosti(levo) in nadomestno vezje
Za določanje pozicije je običajno kontaktni element (drsnik) vezan kot delilnik napetosti. Na zgornji sliki je potenciometer priključen kot napetostni delilnik za konstantno referenčno napetost Va. Če je razdalja med priključkoma A in B enaka Xa in je X razdalja med C in B, potem je izhodna napetost Vx enaka:
𝑉𝑥 = 𝑉𝑎 ∙ 𝑋𝑋𝑎
, 𝑉𝑥 = 𝑅𝑐𝑏𝑅𝑐𝑏+𝑅𝑎𝑐
∙ 𝑉𝑎
Potenciometri z enakomernim nanosom uporovne plasti med enim in drugim robnim priključkom so linearni potenciometri. Poimenovanje izhaja iz dejstva, da je upornost med drsnim in robnim priključkom linearno odvisna od položaja drsnika, iz česar tudi sledi linearna zveza v zgornji enačbi. V uporabi pa so tudi logaritemski potenciometri, pri katerih upornost med drsnikom in enim od robnih priključkom zelo malo narašča z oddaljenostjo x (ali kotom), potem pa vedno hitreje − isto velja tudi za napetost kot funkcijo x.
Slika 3.2: Slika prikazuje idealno linearno in logaritemsko izhodno karakteristiko
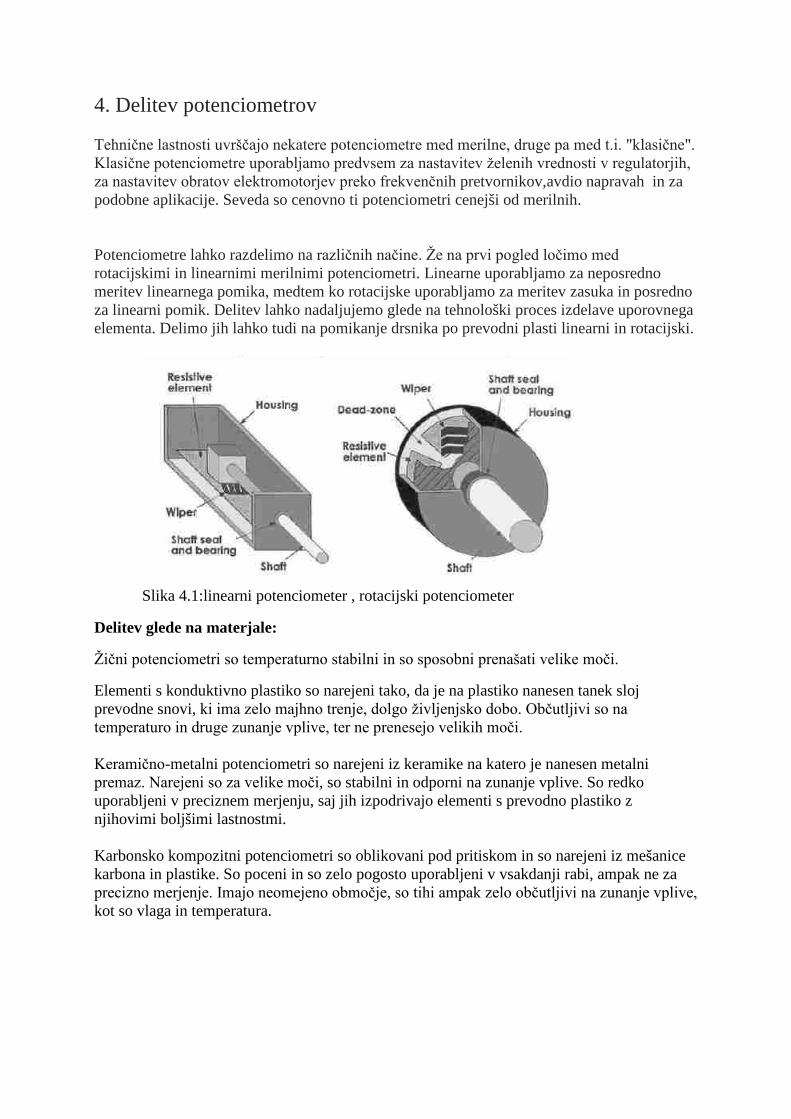
4. Delitev potenciometrov Tehnične lastnosti uvrščajo nekatere potenciometre med merilne, druge pa med t.i. "klasične". Klasične potenciometre uporabljamo predvsem za nastavitev želenih vrednosti v regulatorjih, za nastavitev obratov elektromotorjev preko frekvenčnih pretvornikov,avdio napravah in za podobne aplikacije. Seveda so cenovno ti potenciometri cenejši od merilnih. Potenciometre lahko razdelimo na različnih načine. Že na prvi pogled ločimo med rotacijskimi in linearnimi merilnimi potenciometri. Linearne uporabljamo za neposredno meritev linearnega pomika, medtem ko rotacijske uporabljamo za meritev zasuka in posredno za linearni pomik. Delitev lahko nadaljujemo glede na tehnološki proces izdelave uporovnega elementa. Delimo jih lahko tudi na pomikanje drsnika po prevodni plasti linearni in rotacijski.
Slika 4.1:linearni potenciometer , rotacijski potenciometer
Delitev glede na materjale:
Žični potenciometri so temperaturno stabilni in so sposobni prenašati velike moči.
Elementi s konduktivno plastiko so narejeni tako, da je na plastiko nanesen tanek sloj prevodne snovi, ki ima zelo majhno trenje, dolgo življenjsko dobo. Občutljivi so na temperaturo in druge zunanje vplive, ter ne prenesejo velikih moči. Keramično-metalni potenciometri so narejeni iz keramike na katero je nanesen metalni premaz. Narejeni so za velike moči, so stabilni in odporni na zunanje vplive. So redko uporabljeni v preciznem merjenju, saj jih izpodrivajo elementi s prevodno plastiko z njihovimi boljšimi lastnostmi. Karbonsko kompozitni potenciometri so oblikovani pod pritiskom in so narejeni iz mešanice karbona in plastike. So poceni in so zelo pogosto uporabljeni v vsakdanji rabi, ampak ne za precizno merjenje. Imajo neomejeno območje, so tihi ampak zelo občutljivi na zunanje vplive, kot so vlaga in temperatura.

4.1 Linearni potenciometer Linearni potenciometer se uporablja za detekcijo linearnih premikov, Napetost na izhodu je linearno odvisna od pozicije drsnika. Uporablja se ga tam kje je zaželeno merjenje linearnega premika. Zelo pogosto so porabljajo v ekstremnih pogojih, pod velikimi pritiski, potopljeni pod vodo v atmosferah kje je možna prisotnost eksplozivnih plinov. Oblike potenciometra za merjenje pomika so v različnih oblikah v večni primerov pa se uporablja cilindrična izvedba.
Slika 4.1.: Slika linearnega potenciometra pozicije
4.2 Rotacijski potenciometer Rotacijske potenciometre uporabljamo za detekcijo kotnih sprememb pozicije. Izhodni signal Vout dobimo med priključkom mase in drsnikom, med premikanjem drsnika se proporcionalno spremembi kota spremeni tudi izhodna napetost. Razpon merilnega območja pri tako imenovanem eno obratnem potenciometru (single-turn potenciometer) je od 240 do 330 stopinj. Pri več obratnih izvedbah (multi-turn potenciometri) pa se drsnik lahko zavrti za 10 in več obratov saj je uporovni element zvit v spiralo.
Slika 4.2.: Single-turn potenciometer
Slika 4.3.:Multi-turn potenciometer

4.2.1 String potenciometer String potenciometer je se uporablja za detekcijo in merjenje linearnega pomika in z uporabo fleksibilnega kabla in vzmeti. Drugače imenovanje tega senzorja je tudi potezni vrvni pretvornik (CET), jo-jo senzor in vrvni senzor.
String potenciometer je sestavljeni iz fleksibilnega kabla, vzmeti, bobna s konstantnim premerom in rotacijskega potenciometra. Da se obdrži napetost kabla je vzmet pritrjena na boben na katerega je navit kabel. V središče bobna pa je pritrjen rotacijski senzor (potenciometer). Ohišje mora biti čvrsto pritrjeno na nepremične dele mehanizma. Kabel nato pritrdimo na gibajoči predmet, ko se predmet premika z pripetim kablom, kabel povzroči da se boben obrača. Senzor zazna vrtenje bobna in pretvori linearni pomik v signal na izhodu.
Slika 4.4.: Sestava string potenciometra
Danes se string potenciometer uporablja za testiranje in kot del celotnega proizvodnega procesa, na primer v avtomobilski in vesoljski tehniki, medicini, kemični industriji, robotiki in drugih aplikacijah. Omejitve takih merilnikov so merilna točnost, hitrost premikanja predmeta ki ga meri, temperaturne spremembe vplivajo na dolžino kabla in upornostjo potenciometra in dolžina kabla je omejena. Prednostni cenovno zelo ugodni in življenjska doba tudi do 10 milijonov ciklov.
Slika4.5.: Uporaba pri zapletenih prostorih kje se lahko kable privede do samega merjenca

5. Primer aplikacije s servomotorjem Na sliki je prikazano osnovno delovanje sistema kje uporabimo potenciometer kot oddajnik in sprejemnik želene pozicije. To preprosto vezje prikazuje kako lahko potenciometer uporabimo za spremembo mehanske pozicije iz ene točke v drugo. Mehanska premik drsnika R2 je lahko izhod nekega servomehanizma. V katerem je R2 string potenciometer vezan na servomotor.
Dokler je pozicija drsnikov enaka, se na operacijskem ojačevalniku ne bo pojavila razlika napetosti, servomehanizem se ne bo premikal. Ko pa se drsnik potenciometra R1 premakne se pojavi razlika napetosti katera požene tok v servomehanizem. Motor se premakne v določeno smer in s premikom spremeni lego drsnika na potenciometru R2. S tem zmanjša razliko napetosti na nič in spravi vezje v ravnovesno stanje .
Slika 5.: Splošno vezje za pozicijo servomehanizma z string potenciometrom

6. Induktivni dajalnik pozicije LVDT (ang. Linear variable diferential transformer) Je senzor pozicije. Sestavljen je iz treh ali več tuljav, znotraj katerih je magnetno permeabilno jedro. Jedro deluje kot drsnik ki se giblje skozi navitje. Deluje na principu elektromagnetne indukcije. Ko pride do premikanja drsnika skozi elektromagnetni fluks, ki obdaja elektromagnetna jedra privede do tega da se inducira napetost. S tem se spremeni napetost v sekundarni tuljavi ( LVDT izvedba). Obstaja tudi izvedba RVDT , ki vsebuje senzor ki beleži približevanje. Resolucija senzorja je skoraj neskončna . Poznamo DC in AC tipe LVDT , DC potrebujejo še dodatno vezje.
Slika 6.: Senzor LVDT s primarjem in sekundarjem
Slika 6.2.: Primer izvedbe DC LVDT senzorja, na skrajni desni strani se vidi signalno vezje

7. Fizikalne osnove:
Induktivnost:
𝐿 =𝑁2𝜇0𝜇𝑟𝑆
𝑙
L = induktivnost, N = število ovojev tuljav, 𝜇0= permeabilnost, l = je dolžina, S = površina
Elektromagnetna induktivnost:
L = induktivnost, ϕ = fluks, i = tok
Slika 7.1.: Razporeditev silnic toka (rdeče) in silnic elektromagnetnega polja (rumeno)
Slika 7.2.: Shema LVDT senzorja in izhodne karateristike.
LiΦ
=

8. Zgradba
LVDT sestavljajo tri navitja (eno primarno in dve sekundarni) in magnetno jedro .
Slika 8.: Zgradba senzorja ( Steel Housing - železno ohišje, Coil form - tuljava, Side covers – stranski pokrov, Secondary Windins – sekundarna navitja, Core – jedro)
9. Delovanje
Primarno (vzbujevalno) navitje je napajano z izmenično napetostjo uP, ki skozi ovoje požene električni tok in v okolici navitja ustvari izmenično magnetno polje. Lega pomičnega magnetnega jedra določa območje induktivnega sklopa med primarnim navitjem in sekundarnimi (odjemni) navitji ter s tem velikost inducirane napetosti na posameznem sekundarnem navitju uS1 in uS2. Sekundarni navitji sta orientirani tako, da je izhodna inducirana napetost uS enaka razliki obeh induciranih napetosti uS1 – uS2. Izhodni signal LVDT merilnega sistema predstavlja amplituda izhodne inducirane napetosti US, katere predznak določi fazni demulator.

Slika 9.1.: Jedro ob shemi primarne tuljave, ter sekundarnih dveh tuljav
Če je izvedba LVDT zaznavala simetrična in magnetno jedro pomaknemo v središčno lego, je izhodna inducirana napetost enaka nič. Pri premikanju magnetnega jedra iz središčne lege se amplituda izhodne napetosti US povečuje linearno s pomikom. Enak premik v zgornjo ali spodnjo navitje pomeni enako spremembo amplitude izhodne inducirane napetosti. LVDT zaznavalo vsebuje informacijo o smeri pomika v fazni razliki izhodne inducirane napetosti glede na vhodno vzbujevalno napetost. Ko magnetno jedro pomaknemo v zgornjo tuljavo, je inducirana napetost uS1 po amplitudi večja od uS2, zato je izhodna napetost uS kot razlika obeh v fazi z vzbujevalno napetostjo (fazni zamik 0°). V nasprotnem primeru pa je amplituda uS2 večja od uS1 in tako ima izhodna napetost uS ravno nasproten predznak glede na vzbujevalno napetost (fazni zamik 180°). Fazni demodulator na podlagi fazne razlike med vzbujanjem in odzivom določi predznak izhodnega signala (amplituda izhodne inducirane napetosti US)
Slika 9.2.:Inducirane napetosti v sekundarju LVDR-ja za skrajni levi in skrajni desni položaj pomičnega jedra. V središčnem položaju so napetosti enake.

10. Demodulacija pri DC izvedbi
Da povemo v katero smer se je jedro premaknilo iz ničle, more biti vrednost ki jo dobimo modelirana enosmerno napetost. Tako da bo polariteta pokazala v katero smer se jedro giblje . Najlažje ohranimo enosmerno napetost iz LVDTja z diodnim modulatorjem. Rezultat je diferencialna napetost skozi diodo. Tako je lahko naprimer napetost od -100mV do +100mV. To napetos se nato ojača na 10 V DC izhodne napetosti.
Slika 10.: Diodni demodulator, z diferencialnim ojačevalcem.

11. Praktični primer
Uporaba v avtomobilsi industriji kot merilec razdalje pri blažilcih. To nam omogoča prilagojevanje trnosti podvozja gleden na podlago. Več LVDT jev je priključenih na mesta, ki nam dajo ustrezne podatke, ki nam nato omogočajo nadaljno računalniško obdelavo. V testni fazi preizkušanja prototipa avtomobila je ponavadi uporabljneo do 100 LVDT senzorjev.
Slika 11.: Sistem LVDT jev na vzmetenju avtomobila v vezavi z kontrolno enoto.

Za zaključek za primerjavo na koncu Potenciometer je v osnovi merilnik z izhodnim signalom v realnem času. To pomeni, da med položajem drsnika in izhodnim signalom ni zakasnitve. Hkrati potenciometer "meri" tudi kadar ni pod napetostjo. To pomeni, da je ob vklopu stroja izhodni signal sorazmeren položaju drsnika. Tako ni potrebno izvajati t.i. nuliranja, referenciranja ali postavitve v začetno stanje, kot to popularno imenujemo. Uporaba potenciometrov, kot merilnikov pomika ali zasuka se na področju strojegradnje še vztrajno povečuje, ker so potenciometri sorazmerno preprosti za montažo in ne potrebujejo posebnih nastavitev. Hkrati pa njihova visoka kvaliteta in dolga življenjska doba omogočata zanesljivo delovanje. LVDT : Ker se jedro ne dotika tuljave, je zaradi tega nekontaktni merilni element. To privede do tega da so pogreški manjši. Ter tud ob pogosti uporabi ne pride do obrabe u vplivom na karakteristiko. Robustnost zgradbe mu omogoča uporabo v vlažnih prostorih, območjih z visokimi vibracijami in področjih kjer temperature dosegajo visoke vrednosti.
Razlika med DC in AC LVDT je v tem, da so AC manši od DC, bolj natančni, dobri pri visokih temperaturah. DC pa prednačijo v enostavni namestitvi, enostavnem prenosu podatkov, ter v nizkih stroških.

Viri: Revija: Svet elektronike 2005 marec stran 23, 24,25 Linear position sensors: theory and application (2004) Avtorjih David S. Nyce Handbook of modern sensors (1996) Jacob Fraden ISBN: 1-56396-538-0, 2nd edi. Str. 242 -245 Sensors handbook (1998) Sabrie Soloman ISBN 0-07-059630-1 LINEAR POSITION SENSORS Theory and Application (2003) David S. Nyce ISBN 0-471-23326-9 Strani: od 95 do 108 http://www.bourns.com/data/global/pdfs/OnlinePotentiometerHandbook.pdf (18.4.2011) http://en.wikipedia.org/wiki/Potentiometer (18.4.2011) http://www.electronics-tutorials.ws/io/io_2.html (18.4.2011) http://www.firstmarkcontrols.com/s054b.htm#A (18.4.2011) http://sound.westhost.com/pots.htm (18.4.2011) http://celesco.com/faq/cet.htm (18.4.2011) http://www.analog.com/library/analogdialogue/archives/42-08/lvdt.html (18.4.2011) http://en.wikipedia.org/wiki/Linear_variable_differential_transformer (18.4.2011) http://www.esa.fer.hr/nastava/meh/_OM/predavanja/OM_predavanja_senzori_2.pdf (18.4.2011) http://www.lmps.fs.uni-lj.si/LMPS-SLO/Pedagosko%20delo/PAP/MeritvePAP/Predloge/LV5%2009_10%20MERITVE%20PA.pdf (18.4.2011) http://www.transtekinc.com/Application_Articles/Auto_Susp.pdf (18.4.2011) http://metal.industry-business-network.com/eu/en/companies/profile/products/detail/1801-719--waycon-positionsmesstechnik-gmbh-induktive-sensoren-lvdt.aspx (18.4.2011)
















![KONSTRUIRANJE KROJEV ZA OBLAZINJENJE SEDEŽNE … · 2017-11-28 · prevleko, slika 5. Slika 5: Hrbtne in sedalne blazine preoble čene z zgornjo prevleko [3] Preden dokon čno namestimo](https://img.dokumen.tips/doc/110x75/5e2ea82b2c2be63448664e26/konstruiranje-krojev-za-oblazinjenje-sedene-2017-11-28-prevleko-slika-5-slika.jpg)



